
ESTIMADORDETORQUEELECTRÓNICO ...repository.udistrital.edu.co/bitstream/11349/5373/1...llamado par...
80
FACULTAD DE INGENIERÍA PROYECTO CURRICULAR DE INGENIERÍA ELECTRÓNICA TRABAJO DE GRADO ESTIMADOR DE TORQUE ELECTRÓNICO PARA MOTORES DE INDUCCIÓN JAULA DE ARDILLA PRESENTADO POR : JOHNY ALEXANDER PÉREZ Director: Oscar Florez Universidad Distrital Francisco José de Caldas Bogotá D.C.
Transcript of ESTIMADORDETORQUEELECTRÓNICO ...repository.udistrital.edu.co/bitstream/11349/5373/1...llamado par...

FACULTAD DE INGENIERÍA
PROYECTO CURRICULAR DE INGENIERÍA ELECTRÓNICA
TRABAJO DE GRADO
ESTIMADOR DE TORQUE ELECTRÓNICOPARA MOTORES DE INDUCCIÓN JAULA DE
ARDILLA
PRESENTADO POR :
JOHNY ALEXANDER PÉREZDirector:
Oscar Florez
Universidad Distrital Francisco José de Caldas
Bogotá D.C.

Dedicatoria
A mis padres que con mucho esfuerzo hicieron posible llegar a estas instancias demis estudios de pregado y quienes también siempre han mostrado esa actitudpositiva sin la cual no habría podido inspirarme para realizar este proyecto de
grado.
I
Agradecimientos
Agradezco a los docentes e Ingenieros del área de potencia de la universidad distri-tal Franciso Jose de Caldas Ingeniero Oscar Florez e Ingeniero Pablo Emilio Rozoquienes fueron los encargados de guiar, corregir y calificar los resultados de esteproyecto. A demás agradecer a la universidad Distrital Francisco José de caldas porabrirme un nuevo camino hacia el conocimiento y permitirme conocer compañeros,profesores y amigos de grandes valores y cualidades a lo largo de mis estudios depregrado y quienes me hicieron crecer en muchos ambitos de mi vida.
II

Resumen
Durante años los motores y generadores eléctricos “máquinas eléctricas” han sidocruciales para el avance de las nuevas tecnologías, siendo empleados en las diferentesáreas de la ciencia e industria para el desarrollo de los equipos con tareas específicastales como en el movimiento de objetos en espacios determinados (con la mejorprecisión posible), procesos de manufactura, transformación de los tipos de energíaconvencionales como la eólica, hidráulica y térmica en energía eléctrica, entre otras; ypor ello son reconocidas como maquinas versátiles para cualquier entorno de trabajo.Además, la forma de trabajo de estas máquinas está enfocada a transformaciones deenergía mecánica a energía eléctrica o viceversa y justo por ello surge la necesidadde un modelamiento físico matemático acompañado de un diseño ingenieril óptimo,con el fin de aprovechar la capacidad máxima de esta conversión dual de energía.Por otro lado, la complejidad de estos sistemas ha hecho que sean estructurados yrepresentados por diferentes variables físicas entre las cuales se encuentran velocidadangular, momento de inercia, la interacción de los campos electromagnéticos dentrodel sistema, diferencias de potenciales eléctricos y torque mecánico (comúnmentellamado par eléctrico). Esta última variable es de gran importancia, ya que lasmaquinas eléctricas deben estar ubicadas dentro de un margen o rango de trabajo;por ejemplo, la diferencia entre mover un tren eléctrico o una cinta transportadora,lo cual a simple vista requiere cantidades diferentes de torque. Pero existen ocasionesen las que el ojo humano no puede discriminar o diferenciar entre el torque ejercidopor una maquina u otra de características similares. Esto conlleva a la idea del diseñoy la implementación de un dispositivo que permita la estimación del par eléctrico conla mejor resolución posible; pues esta variable tiene bastante relevancia en proyectosde ingeniería conformados por sistemas inerciales. Esta propuesta de trabajo estádirigida a desarrollar un estimador de torque para motores de inducción jaula deardilla con la finalidad de ser aplicado de forma educativa y con un enfoque haciala industria.
III

Objetivos
GeneralImplementar un Estimador de torque electrónico con el apoyo de un Software deinterfaz (Matlab ó LabVIEW) para los motores inducción jaula de ardilla DELO-RENZO del laboratorio de la Facultad Tecnológica de la Universidad Distrital.
Específicos
Caracterizar la operación de los motores eléctricos de inducción jaula de ardi-lla DELORENZO para establecer las condiciones de diseño de la medida deltorque.
Diseñar e implementar el sistema electrónico para la estimación del torque alos motores en referencia.
Implementar la interfaz de estimación del torque y demás parámetros relacio-nados con el torque como la potencia de entrada y velocidad angular.
Implementar un módulo para el uso del estimador y desarrollar un manualpara el manejo del software con las conexiones necesarias.
IV

Índice general
Dedicatoria I
Agradecimientos II
Resumen III
Objetivos IV
Lista de figuras VII
Lista de tablas XI
1. Generalidades del motor de Inducción 11.1. Definición motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Motor de inducción . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2. Motor Jaula de ardilla . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Conceptos básicos sobre motores de inducción . . . . . . . . . . . . . 11.2.1. Deslizamiento y Frecuencia eléctrica en el rotor . . . . . . . . 31.2.2. Circuito Equivalente del motor de inducción . . . . . . . . . . 31.2.3. Potencia y Par en un motor de inducción . . . . . . . . . . . . 51.2.4. Curva Par contra Velocidad . . . . . . . . . . . . . . . . . . . 6
1.3. Arranque de un motor de jaula de ardilla . . . . . . . . . . . . . . . . 61.3.1. Conexión directa (Voltaje pleno) . . . . . . . . . . . . . . . . 71.3.2. Conexión estrella-delta . . . . . . . . . . . . . . . . . . . . . . 71.3.3. Conexión con transformador de arranque . . . . . . . . . . . . 71.3.4. Conexión con resistencia al estator . . . . . . . . . . . . . . . 8
1.4. Normas que regulan el funcionamiento de un motor Eléctrico . . . . . 81.4.1. Normas de Eficiencia Energética de Motores de Inducción . . . 81.4.2. Protocolos y normas para la medición de parámetros . . . . . 8
2. Caracterización del motor 102.1. Circuito Equivalente: . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1. Prueba de DC . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.2. Prueba de rotor bloqueado . . . . . . . . . . . . . . . . . . . . 112.1.3. Prueba en vacío . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.4. Prueba Pérdidas Rotacionales y Núcleo . . . . . . . . . . . . 15
2.2. Relaciones de potencia en el motor . . . . . . . . . . . . . . . . . . . 19
V

VI ÍNDICE GENERAL
2.3. Estimación del torque en el motor . . . . . . . . . . . . . . . . . . . . 222.4. Medida directa del torque . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4.1. Medida por medio de galga extensiométrica . . . . . . . . . . 302.5. Medida directa V.S Estimación del Torque . . . . . . . . . . . . . . . 31
3. Diseño Electrónico 343.1. Circuito para obtención de potencia de entrada (3VΦILCosθ) . . . . 34
3.1.1. Circuito para obtención de voltaje de fase (VL) . . . . . . . . 343.1.2. Circuito para obtención de corriente de línea (IL) . . . . . . . 403.1.3. Circuito para obtención de ángulo de fase (θ) . . . . . . . . . 42
3.2. Circuito para obtención de la velocidad angular (nm) . . . . . . . . . 46
4. Instrumentación e Interfaz por Software 484.1. Procesamiento de las señales . . . . . . . . . . . . . . . . . . . . . . . 48
4.1.1. Algoritmo para obtención TrueRMS del voltaje y la corrientede línea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.1.2. Algoritmo para obtención del Factor de potencia y Potenciade entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.1.3. Algoritmo para obtención de la velocidad angular y Estima-ción del Torque . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1.4. Recepción y graficación de datos . . . . . . . . . . . . . . . . 54
5. Manual para uso del estimador (ETE) 565.1. Primer uso del dispositivo . . . . . . . . . . . . . . . . . . . . . . . . 585.2. Graficación de datos en LabVIEW . . . . . . . . . . . . . . . . . . . . 59
5.2.1. Posible WARNING de LabVIEW por desconexión inadecuadadel dispositivo . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Conclusiones 63
Trabajos futuros 64
Anexos 65

Índice de figuras
1.1. Motor jaula de ardilla [22]. . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Motor jaula de ardilla [23]. . . . . . . . . . . . . . . . . . . . . . . . . 41.3. Flujo de potencia en el motor [21]. . . . . . . . . . . . . . . . . . . . 51.4. Curva Par V.S Velocidad para un motor de Inducción [24]. . . . . . . 6
2.1. Motor jaula de ardilla [21]. . . . . . . . . . . . . . . . . . . . . . . . . 112.2. Prueba de rotor bloqueado de un motor de inducción:a). esquema de
conexión b). Circuito equivalente del motor [21]. . . . . . . . . . . . . 122.3. Prueba en vacío de un motor de inducción. a);Circuito de prueba b)
Circuito equivalente del motor resultante. [21]. . . . . . . . . . . . . . 142.4. Grafica con los valores de prueba obtenidos (ViPi) junto con la recta
de regresión lineal obtenida para poder hallar las pérdidas por friccióny viento del motor de inducción. . . . . . . . . . . . . . . . . . . . . . 17
2.5. Circuito equivalente por fase con pérdidas por fricción y pérdidas enel núcleo separadas. [21]. . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6. Circuito equivalente por fase con pérdidas por fricción y pérdidas enel núcleo separadas. [21]. . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.7. a) Voltaje equivalente de Thevenin del circuito de entrada de un mo-tor de inducción. b)Impedancia equivalentede Thevenin del circuitode entrada.c) Circuito equivalente resultante simplificado de un motorde inducción. [21]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.8. Circuito equivalente de Thevenin para el motor de inducción. . . . . . 252.9. Curva Par-Velocidad del motor de inducción por medio del circuito
equivalente de Thevenin sin la resistencia del núcleo [28]. . . . . . . . 262.10. Curva Par-Velocidad del motor de inducción por medio del circuito
equivalente de Thevenin con la resistencia del núcleo. [28]. . . . . . . 292.11. Freno electromagnético. a) Freno de la familia DELORENZO.b) Ter-
minales de suministro DC al motor. [30]. . . . . . . . . . . . . . . . . 302.12. Motor de inducción conectado al freno electromagnético. [30]. . . . . . 312.13. Galga extensiométrica conectada al freno electromagnético [30]. . . . 312.14. Acondicionador y visualizador de la señal enviada por la galga esten-
siométrica. [30]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.15. Coordenadas del Par-velocidad de la tabla 8 graficadas y superpuestas
a la curva para velocidad de la figura 17 (modelo de Thevenin sin RC).a) Tamaño completo de la curva par velocidad. b) Zoom para observarlo puntos de la tabla(línea roja). [28]. . . . . . . . . . . . . . . . . . . 33
VII

VIII ÍNDICE DE FIGURAS
2.16. Coordenadas del Par-velocidad de la tabla 8 graficadas y superpuestasa la curva para velocidad de la figura 18 (modelo de Thevenin conRC). a) Tamaño completo de la curva par velocidad. b) Zoom paraobservar lo puntos de la tabla(línea roja). [28]. . . . . . . . . . . . . . 33
3.1. Circuito divisor y subidor de nivel para posterior procesamiento en elmicrocontrolador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2. Acondicionamiento del voltaje de fase. a) Diagrama esquematico dela salida del circuito acondicionador. b) Diagrama del cambio linealde rango de voltaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3. Circuito Atenuador y elevador nivel DC Simulado a) Implementacionen el simulador. b) respuesta del circuito. . . . . . . . . . . . . . . . . 38
3.4. Repuesta del circuito atenuador y subidor de nivel DC medida en ellaboratorio. a) Entrada de voltaje al circuito. b) Salida de voltaje delcircuito. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5. Sensor de corriente ACS712. a) Módulo donde seencuentra ya condi-cionado el sensor.b) Esquema de conexión de pines del sensor. . . . . 40
3.6. Función de transferencia del sensor. . . . . . . . . . . . . . . . . . . . 413.7. Sensor de corriente ACS712. a) Módulo donde seencuentra ya condi-
cionado el sensor.b) Esquema de conexión de pines del sensor. . . . . 423.8. Respuesta del sensor de corriente ACS712 medida en el laboratorio . 433.9. Circuito comparador de voltaje y corriente de línea. a) Circuito com-
parador implementado con Amplificadores operacionales. b) Señalesdigitales de voltaje y corriente resultantes. . . . . . . . . . . . . . . . 43
3.10. Circuito digital para comparar la señal de voltaje y corriente VC
e IC.a) Implementación del circuito. b) Respuesta donde se puedeobservar la difencia de tiempo de las señales. . . . . . . . . . . . . . . 44
3.11. Circuito comparador en serie con el circuito digital para obtener elángulo de desfase entre el voltaje y la corriente de línea. [22]. . . . . . 44
3.12. Respuesta del circuito para obtención del ángulo de desfase entre elvoltaje y la corriente de línea. . . . . . . . . . . . . . . . . . . . . . . 45
3.13. Señales de salida del circuito comparador. a) Señal de corriente consu señal de cruce por nivel DC. b) Señal de voltaje junto con su señalde cruce por nivel DC. . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.14. Señal de ángulo de desfase entre corriente y voltaje de línea. a) Se-ñales de curce por nivel DC de voltaje(Amarilla) y corriente(azul)superpuestas. b) Señal de salida del circuito digital. . . . . . . . . . . 46
3.15. Sensor de obstáculos infrarrojo IR FC-51. a) Módulo donde se en-cuentra ya acondicionado el sensor. b) Esquema de conexión de pinesdel sensor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.16. Funcionamiento del sensor infarrojo para medir velocidad angular deun eje giratorio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.1. Microcontrolador PSoC5LP de la familia Cypress usado para el pro-cesamiento de las señales. . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2. Discretización y muesteo de la señal para obtener su valor TrueRms. . 50

ÍNDICE DE FIGURAS IX
4.3. Algoritmo (Diagrama de flujo) para obtención del valor TrueRms delvoltaje y corriente de línea. . . . . . . . . . . . . . . . . . . . . . . . 51
4.4. Algoritmo (Diagrama de flujo) para obtención del ángulo de desfaseentre el voltaje y la corriente. . . . . . . . . . . . . . . . . . . . . . . 52
4.5. Algoritmo (Diagrama de flujo) para obtención de la velocidad angulary el valor estimado del torque. . . . . . . . . . . . . . . . . . . . . . . 53
4.6. Algoritmo (Diagrama de bloques en LabVIEW para recepción y gra-ficación de datos en el computador. . . . . . . . . . . . . . . . . . . . 55
5.1. Vista superior del dispositivo Estimador de Torque Electrónico (ETE). 565.2. Vista lateral del dispositivo Estimador de Torque Electrónico (ETE). 575.3. Conexión USB entre el ETE y el computador. . . . . . . . . . . . . . 585.4. Menú que despliega la pantalla LCD del dispositivo Estimador de
torque (ETE). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.5. Manera de medir la velocidad angular del motor de Inducción. . . . . 595.6. Plataforma de LabVIEW para graficación del torque de la máquina. . 605.7. Grafica de Torque V.S tiempo. . . . . . . . . . . . . . . . . . . . . . . 605.8. Posible mensaje de error por desconexión incorrecta del ETE. . . . . 61


Índice de tablas
2.1. Valores de voltaje y su correspondiente potencia en la prueba de pér-didas por fricción y rozamiento del motor de inducción. . . . . . . . . 16
2.2. Valores de V oltaje2 V.S potencia para realizar el análisis de regresiónlineal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3. valores de torque V.S velocidad angular medidos por medio de la galgaextensiométrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
XI

Capítulo 1
Generalidades del motor deInducción
1.1. Definición motorMaquina destinada a producir movimiento a expensas de otra fuente de energía(motor eléctrico, térmico, hidráulica). [20]
1.1.1. Motor de inducción
Los motores de inducción trifásicos son muy comunes en la industria gracias a suscaracterísticas de velocidad y torque ya que tienen una baja frecuencia de man-tenimiento. Su uso se prefiere principalmente en procesos que requieren una grancantidad de potencia como son los procesos productivos y extractivos. Los motoresde inducción reciben este nombre debido a que en el rotor se induce un voltaje ensu devanados a diferencia de los motores síncronos que tienen una fuente de voltajeexterna conectado al rotor .
Los motores de inducción se clasifican por las características físicas y constituti-vas del rotor. Cada una de estas configuraciones ofrecen diferentes características lascuales se deben tener en cuenta para el diseño y puesta en marcha del proceso quese requiera [21].
1.1.2. Motor Jaula de ardilla
El motor jaula de ardilla recibe ese nombre debido a que la inducción de voltajeen el rotor se realiza a través de barras metálicas cortocircuitadas asimilándose auna jaula de ardilla. Se debe tener en cuenta que en este tipo de motores no sepuede acceder al circuito eléctrico del rotor, en la figura 6 [21] se puede observar suconstitución .
1.2. Conceptos básicos sobre motores de inducciónLa velocidad del campo magnético estatórico BS está dada por :
1

2 Generalidades del motor de Inducción
Figura 1.1: Motor jaula de ardilla [22].
nsinc =120fe
P(1.1)
donde:
nsinc = velocidad de rotacion en rpm (1.2)
fe = frecuencia del sistemas en hertz (1.3)
p = número de polos de la máquina (1.4)
Este campo magnético rotacional BS pasa sobre las barras del rotor e induce unvoltaje en ellas. El voltaje inducido en una barra determinada del rotor está dadapor la ecuación:
eind = (~v × ~B) · l (1.5)
donde:
~v = velocidad de la barra relativa al campo magnético (1.6)
~B = vector de densidad de flujo magnético (1.7)
l = longitud del conductor en el campo magnético (1.8)
El flujo de corriente del rotor produce un campo magnético del rotor BR y se produceun torque inducido en el rotor del motor dado por:
τind = ~kBR × ~BS (1.9)
Los campos magnéticos del estator y del rotor Bs y BR rotan conjuntamente avelocidad sincrónica nsinc mientras que el rotor en sí gira a un velocidad menor [21].

1.2. CONCEPTOS BÁSICOS SOBRE MOTORES DE INDUCCIÓN 3
1.2.1. Deslizamiento y Frecuencia eléctrica en el rotor
Exsisten dos conceptos de valiosa importancia en el funcionamieto de motores deinducción sin los cuales no se podrían esturcturar de manera correcta la operacion ylos rangos de operacion de dicha máquina los cuales son mencionados a continuación:
En general se utilizan dos términos para definir el movimiennto relativo entre elrotor y los campos magnéticos. Uon de ellos es Velocidad de deslizamiento, definidacomo la velocidad síncrona y la velocidad del rotor:
ndes = nsinc − nm (1.10)
donde:
ndes = velocidad de deslizamiento de la máquina (1.11)
nsinc = velocidad de los campos magnéticos (1.12)
nm = velocidad mecánica del eje del motor (1.13)
El otro término utilizado para describir el movimiento relativo es el deslizamiento elcual es la velocidad relativa expresada sobre una base en por unidad o porcentaje.El deslizamiento esta definido como:
s =nsinc − nmnsinc
(×100 %) (1.14)
Estas ecuaciones son útiles en la deducción del par del motor de inducción y en lasrelaciones de potencia.
Por otro lado, un motor de inducción trabaja induciendo tensiones y corrientes en elrotor de la máquina, por esa razón a veces se le llama transformador rotante. Comotransformador, el primario (estator) induce un voltaje en el secundario (rotor) pero, a diferencia del transformador, la frecuencia secundaria no es necesariamente lamisma que frecuencia primaria. esta frecuencia secundaria es expresada como:
fr = sfe (1.15)
Existe otra forma alternativa útil para esta expresión:
fr =P
120(nsinc − nm) (1.16)
1.2.2. Circuito Equivalente del motor de inducción
La operación de un motor de inducción, depende de la inducción de voltajes ycorrientes en su circuito de rotor desde el circuito de estator; en esencia uno operaciónde transformación. Por ello un motor de inducción es también llamado una máquinade excitación única. Su circuito equivalente (por fase) se puede observar en la figura1.2 [23].

4 Generalidades del motor de Inducción
Figura 1.2: Motor jaula de ardilla [23].
donde:
V1= Voltaje aplicado por fase.
R1= Resistencia por fase del devanado de estator.
X1= Reactancia de dispersión por fase del devanado del estator.
Xm= Reactancia de magnetización por fase.
Rc= Resistencia equivalente de la pérdida en el núcleo por fase.
E1= fem inducido por fase en el devanado del estator.
Er= fem inducido por fase en el devanado del rotor.
Rr= Resistencia por fase del devanado del rotor.
Xr= Reactancia de dispersión por fase devanado del rotor.
Ir= Corriente por fase en el devanado del rotor.
Iphi= Corriente por fase alimentada por la fuente.
Ic= Corriente por fase de la pérdida en el núcleo.
Im= Corriente de magnetización por fase.
I1 = Ic + Im = Corriente de excitación por fase.
La relación efectivas de vueltas aeff es fácil de determinar en un motor de rotordevanado (relación de entre los conductores por fase del estator y conductores por

1.2. CONCEPTOS BÁSICOS SOBRE MOTORES DE INDUCCIÓN 5
fase del rotor), pero en un motor de jaula de ardilla se hace complejo ver con claridadaeff debido a que no hay devanados distintos en este rotor. En todo caso se encuentrauna relación eféctiva de vueltas para el motor.
1.2.3. Potencia y Par en un motor de inducción
En un motor de inducción ingresa potencia eléctrica (trifásica) en el estator, la cuales transformada en el rotor en potencia mecánica. La relación de la potencia eléctricade entrada y potencia mecánica de salida se muestra en la figura 1.3 [21].
Figura 1.3: Flujo de potencia en el motor [21].
En el diagrama de flujo se pueden apreciar las pérdidas de potencia a través delproceso de conversión de energía eléctrica a energía mecánica.
Es importante de la anterior figura observar la ecuación:
Pconv = PAG + PRCL (1.17)De esta ecuación se puede obtener el torque inducido como:
τind =Pconvωm
(1.18)
Este también llamado el par desarrollado de la máquina.
Si el motor operara a plena carga, la ecuación de potencia de salida haciendo refe-rencia a la figura anterior sería:
Pout = PF&W + Pmisc (1.19)
y el par en la carga sería:
τcarga =Poutωm
(1.20)

6 Generalidades del motor de Inducción
1.2.4. Curva Par contra Velocidad
El par o momento de torsión desarrollado desarrollado por un motor depende desu velocidad, pero la relación entre los dos no se puede expresar por una simpleecuación. Por consiguiente es preferible mostrar la relación en forma de una curva[24]. La figura 1.4 muestra la curva de momento de torsión-velocidad de un motor deinducción trifásico convencional cuyo momento de torsión nominal a plena carga es T.el momento de torsión de arranque es 1.5T y el momento de torsión máximo(llamadomomento de torsión ruptura) es 2.5 T.
Figura 1.4: Curva Par V.S Velocidad para un motor de Inducción [24].
El momento de torsión de aceleración es el momento de torsión mínimo desarrolladopor el motor mientras está acelerando desde el reposo hasta el momento de torsiónmáximo.
A plena carga el motor funciona a una velocidad n . Si la carga mecánica se in-crementa un poco, la velocidad se reducirá hasta que el momento de torsión delmotor se igual al momento de torsión de la carga. En cuanto los dos momentos detorsión están en equilibrio, el motor gira a una velocidad constante pero un poco másbaja. Sin embargo, si el momento de torsión de la carga excede los 2.5T(el momentode torsión máximo), el motor se detendrá de inmediato.
Los motores pequeños(15 hp o menos) desarrollan su par o momento de torsiónmáximo a una velocidad de aproximádamente 80% de la velocidad síncrona. Losmotores grandes (1500 hp y más) alcanzan su momento de torsión a aproximáda-mente 98% de su velocidad síncrona.
1.3. Arranque de un motor de jaula de ardilla
La generación de un par-motor en un motor de inducción es de la siguiente forma [25]:
1.3. ARRANQUE DE UN MOTOR DE JAULA DE ARDILLA 7
1. Se establece un campo magnético rotatorio cuando se aplica un voltaje trifásicoal estator de la máquina.
2. El campo rotatorio induce un voltaje en las barras del rotor.
3. El voltaje induce crea unas grandes corrientes (por lo general de cientos deamperios) que fluyen en las barras del rotor y en los anillos del extremo.
4. Las barras del rotor que transportan corriente dentro del campo magnéticocreado por el estator; por lo tanto se ven sometidos a una gran fuerza mecánica.
5. La suma de las fuerzas mecánicas en todas las barras del rotor un par o momen-to de torsión que tienden arrastrar el rotor en la misma dirección del camporotatorio.
Existe cuatro tipos de arranque para operar motores de inducción jaula de ardilla,los cuales se mencionan a continuación [25]:
1.3.1. Conexión directa (Voltaje pleno)
: Es la forma más sencilla de conectar los motores trifásicos con rotor de jaula.Este procedimiento es usual en casi todas las aplicaciones industriales y deberíaser utilizado siempre y cuando las condiciones de la red lo permitan. El métodoconsiste en la conexión del motor directamente a la tensión nominal de la red. Eneste arranque inicialmente se dan unos valores muy elevados, el par puede ser el dobledel nominal y la intensidad de corriente hasta diez veces superior a la intensidadnominal.
1.3.2. Conexión estrella-delta
: Las medidas para limitar la corriente de arranque en un motor con rotor de jaula,al que no puede realizarse ninguna modificación, consisten normalmente en aplicar,al motor durante el arranque, una tensión reducida. Este tipo de conexión radicaen arrancar el motor conectado en estrella y una vez que alcanza la velocidad derégimen se conecta en delta. La corriente de arranque desciende en las acometidas ala red a menos de un tercio. El par de arranque se reduce en igual proporción que lacorriente de la red y, por ende, es menor de un tercio del par de arranque en conexióndirecta. La conmutación se produciría antes que se cruzaran el par resistente y elpar motor en conexión triangulo.
1.3.3. Conexión con transformador de arranque
: Con este método se reduce la tensión aplicada al motor por medio de un transfor-mador de arranque, la intensidad de parada se reduce en igual proporción, mientrasque el par de bache y la intensidad de red disminuyen de forma cuadrática.

8 Generalidades del motor de Inducción
1.3.4. Conexión con resistencia al estator
: Se utiliza en los casos en que hay que reducir el par de arranque del motor conmedios elementales.
1.4. Normas que regulan el funcionamiento de unmotor Eléctrico
Dentro de estas encontramos dos normas y/o protocolos que se consideran de granimportancia en el desarrollo del proyecto y se mencionan a continuacion :
1.4.1. Normas de Eficiencia Energética de Motores de Induc-ción
En la actualidad latinoamericana se presenta un atraso con respecto a las normasde eficiencia mundiales tales como IEC 60034-30:2008, IEC 60034-2-1:2007, IEEE112:2004 y EPAct92; en Colombia está surgiendo el RETIQ (Reglamento Interno deEtiquetado) el cual incluye en sus anexos los métodos de ensayo para determinarla eficiencia de los motores de inducción de corriente alterna de los cuales podemosdeterminar los siguientes conceptos [26]:
Eficiencia promedio: valor promedio de eficiencia para una población de mo-tores con el mismo diseño y características.
Eficiencia Asignada: valor de eficiencia declarada por el fabricante igual omayor al de la eficiencia nominal.
Eficiencia nominal: Eficiencia exigida para una determinada clase de eficienciade acuerdo con las tablas dadas en este reglamento.
Dinamómetro: artefacto para aplicar carga mecánica a un motor en formacontinua y controlada, puede medir tanto el par torsional como la frecuencia.
Adicionalmente se han hecho definiciones adaptadas de las normas IEC 60034-30“ROTATING ELECTRICAL MACHINES PART 30: EFFICIENCY CLASSESOF SIGLE-SPEED, THREE PHASE, CAGE-INDUCTIONMOTORS (IE-CODE)”.IEC60034-30-1: 2014-03 “ROTATING ELECTRICAL MACHINE ? PART 30: EF-FICIENCY CLASSES OF LINE OPERATED AC MOTORS (IE-CODE)”.
1.4.2. Protocolos y normas para la medición de parámetros
La norma IEEE 112 es una de las más adecuadas para caracterizar o hallar el cir-cuito equivalente de un motor de inducción, en donde se mencionan los siguientesaspectos y/o procedimientos estándar [27]:
Método B: Usado para determinar las caracterpisticas del motor usando los si-guientes procedimientos.

1.4. NORMAS QUE REGULAN EL FUNCIONAMIENTO DE UN MOTOR ELÉCTRICO9
Clasificaciones de las pérdidas en los motores de inducción.
Medición en frio de la resistencia de los devanados del estator .
Ensayo de temperatura a carga nominal.
Ensayo bajo carga .
Ensayo de carga mínima.
Ensayo sin carga .
Calculo de las perdidas rotacionales.
Cálculos por efectos de joule en el rotor.
Calculo de potencia en la salida.
Calculo de las potencias adicionales y residuales.
Correcciones de las perdidas.
Cálculos de las eficiencias.
Calculo del factor de potencia.
Método F: Es probablemente el más recomendado para determinar las caracterís-ticas del funcionamiento de la maquina cuando no se puede efectuar la prueba decarga, consiste en hallar un modelo matemático que represente el circuito equivalentede una fase del motor asíncrono y se realizan las siguientes pruebas.
Prueba de vacio.
Prueba de impedancia(método 1, método 2, método 3, método 4).Método 1: Una prueba de impedancia de rotor bloqueado en un máximo del25% de la frecuencia nominal, estra prueba se hace a la corriente nominal.
Método 2: una prueba de impedancia de rotor bloqueado en tres frecuen-cias: una aproximadamente al 50% de la frecuencia nominal y otra al 25% dela frecuencia nominal, todas a la corriente nominal.
Método 3: Una prueba de impedancia a una velocidad de deslizamientoaproximadamente a la frecuencia de rotor reducida deseada. En este meto-do el motor está funcionando desacoplado o acoplado a una carga reducidady el voltaje es reducido a uno aproximadamente a plena carga en el punto dedeslizamiento. Este deslizamiento será medido cuidadosamente.
Método 4: Cuando ninguno de los métodos previos es práctico, la siguienteprueba puede ser utilizada: una prueba de impedancia de rotor bloqueado envoltaje reducido a la frecuencia nominal resultando en aproximadamente lacorriente nominal y prueba bajo carga.
Prueba de rotor bloqueado .

Capítulo 2
Caracterización del motor
2.1. Circuito Equivalente:El circuito equivalente de un motor de inducción es muy útil para determinnar larespuesta del motor ante cambios en la carga. Si embargo si se requiere un modelode una máquina real, se debe determinar qué valores de los elementos entraran en elmodelo(conocidos como parámetros del modelo). Como en muchos otros análisis deartefactos polifásicos, conviene realizar las pruebas para la máquina con conexión enY de modo que las corrientes sean valores lineales y los voltajes siempre sean valoresde línea a neutro. A demás al considerar que se está trabajando con una máquinacon devanados polifásicos simétricos excitados por voltajes polifásicos balanceados,es posible observar el circuito equivalente para una fase, con el entendimiento de quelos voltajes y corrientes en las fases restantes pueden ser encontrados simplementemediante una desplazamiento de fase de las fases en estudio (+- 47 en el caso deuna máquina trifásica). Los valores de los parámetros fueron obtenidos con una seriede pruebas las cuales son mencionadas a continuación.1.
2.1.1. Prueba de DC
Esta prueba fue realizada conectando dos de los tres terminales como se observa enla figura 2.1.
Para realizar esta prueba se ajustó la corriente en los devanados del estator a suvalor nominal y se midió el voltaje entre los terminales. Se ajustó la corriente en losdevanados del estator a su valor nominal en un intento por calentar los devanados ala misma temperatura que tendrán durante la operación normal, pues la resistenciadel devanado está en función de la temperatura.
Puesto que esta prueba se realizó para la máquina que inicialmente se encontra-ba fría, entonces se tuvó que esperar hasta que la temperatura en los devanadosllegará a un valor estable (o como si estuviera en funcionamienton nominal) por
1Estas pruebas fueron realizadas basandose en el método F de las pruebas estandar IEEE112para motores de inducción polifásicos.
10

2.1. CIRCUITO EQUIVALENTE: 11
Figura 2.1: Motor jaula de ardilla [21].
ende la resistencia empieza a aumentar hasta que llega a un valor estable y la co-rriente también disminuye hasta que llega a un valor estable. Con este valor establede corriente y sabiendo el voltaje que se aplicó en los terminales se determina elvalor de la resistencia con la siguiente ecuación: [21].
R1 =V DC
2IDC(2.1)
El voltaje y la corriente (estable) obtenida fueron:
VDC = 19.6 VIDC = 1.75 A con lo cual,
R1 =30, 1V
2(1, 75A)= 5, 6 Ω
2.1.2. Prueba de rotor bloqueado
La segunda prueba realizada al motor consistió en bloquear el rotor del motor ymedir el votaje, la corriente y la potencia resutantes. Las conexiones (en forma es-quemática) para la prueba de rotor bloqueado se muestran en la figura 2.2.a). Parallevarla a cabo se aplica un voltaje de CA al estator y se ajusta el flujo de corrientepara que sea próximo a su valor a plena carga (nominal). Cuando se ha ajustado lacorriente a plena carga se mide el voltaje y la potencia que fluye en el motor. Debidoa que el motor no se mueve el deslizamiento es s =1 y por ende la resistencia R2/s(conocida como resistencia efectiva o dinámica) y X2 son pequeñas y entonces casino fluye corriente por la reactancia de magentización XM que es mucho mas grande.por lo tanto en estas circustancias el circuito se ve como una combinación en seriede X1, R1, X2 y R2 tal como se observa en la figura 2.2.b).
Sin embargo durante la operacion normal (nominal)la frecuencia del estator es lafrecuencia de la línea en el sistema de potencia (60 Hz en este caso) pero la frecuen-cia del rotor es pequeña en comparación a esta ya que el deslizamiento en la mayoríade los motores es tan solo del 2 a 5% y la frecuencia está en el rango de 1 a 3 Hz.Una solución típica es utilizar una frecuencia igual o menor al 25% de la frecuencia

12 Caracterización del motor
Figura 2.2: Prueba de rotor bloqueado de un motor de inducción:a). esquema deconexión b). Circuito equivalente del motor [21].
nominal.
Una vez fijado el voltaje y le frecuencia (15 Hz) se procedió ajustar rápidamenteel flujo de corriente en el motor a un valor cercano al nominal (2.7 A) y se midióla potencia de entrada. esta prueba se debe hacer rápido antes de que el motor secaliente demasiado. Los datos obtenidos fueron:
VL= 54.2 VIL= 2.7 AP = 233.5 W
la potencia de entrada al motor está dada por:
P =√
3VLILcosθ (2.2)
Por lo que el factor de potencia de rotor bloqueado es:
FP =P√
3VLIL(2.3)
Por lo tanto,

2.1. CIRCUITO EQUIVALENTE: 13
FP =233,5W√
3(54,2V )(2,7A)= 0, 921 (2.4)
Y el ángulo de impedancia θ es igual a
θ = cos−1FP = 23, 03
En este momento, la magnitud de la impedancia total en el circuito del motor es:
|ZRB| =VΦ
IL=
VL√3IL
=54, 2V√3(2,7A)
= 11, 6 Ω (2.5)
Entonces,
ZRB = RRB + jX ′RB = |ZRB|cosθ + j|ZRB|senθ
La resistencia de rotor bloqueado es igual a:
RRB = R1 + R2
Y como,
RRB = |ZRB|cosθ = (11, 6 Ω)cos(23, 03) = 10, 7 Ω
Y ya que se conoce R1, entonces :
R2 = RRB −R1 = 10, 7 Ω− 5, 6 Ω = 5, 1 Ω
Por otro lado se obtiene X ′RB como
X ′RB = |ZRB|senθ = (11, 6 Ω)sen(23, 03) = 4, 5 Ω
Ahora, puesto que la reactancia es directamente proporcional a la frecuencia, lareactancia total equivalente a la frecuencia nominal de operación esta por:
XRB =fnomfprueba
X ′RB = X1 + X2 =
(60Hz
15Hz
)4, 5 Ω = 18, 2 Ω
Y para todo fin práctico se pueden suponer estas reactancias iguales, es decir,
X1 = X2 = 0, 5XRB = 9, 1 Ω
En la práctica normal no importa cómo se separe XRB, puesto que la reactanciaaparece como la suma de X1 y X2 en todas las ecuaciones del par.

14 Caracterización del motor
2.1.3. Prueba en vacío
La prueba en vacío de un motor de inducción mide las pérdidas rotacionales delmotor y brinda información sobre su corriente de magnetización. Para realizar estaprueba se conectó el motor como se muestra en la figura 2.3.a), al que se le permitegirar libremente. La única carga en el motor son las pérdidas por fricción y porrozamiento con el aire, por lo que toda la Pconv se consume en pérdidas mecánicasy el deslizamiento del motor es muy pequeño. Con este deslizamiento tan pequeñola resistencia R2(1-s/s)(comúnmente llamada resistencia de carga) es mucho mayora la resistencia que corresponde a las pérdidas en el rotor R2 y mucho mayor quela reactancia del rotor X2 por lo cual el circuito equivalente del motor se reduce almostrado en la figura 2.3.b).
Figura 2.3: Prueba en vacío de un motor de inducción. a);Circuito de prueba b)Circuito equivalente del motor resultante. [21].

2.1. CIRCUITO EQUIVALENTE: 15
En este motor en condiciones de vacío, la potencia de entrada medida por los wat-tímetros debe ser igual a las pérdidas que sufre. Las pérdidas en el cobre del rotorson despreciables por que la corriente I2 es extremadamente pequeña (debido a lagran resistencia de carga R2(1-s/s)) por lo que se pueden despreciar.
El circuito equivalente que describe al motor operando en eta condición contieneresistores RC y R2(1-s/s) en paralelo con la reactancia de magnetización XM. Lacorriente que se requiere para estblecer un campo magnético es bastante grande enun motor de inducción debido a la alta reluctancia de su entrehierro, por lo que lareactancia XM será mucho más pequeña que las resistencias conectadas en paralelocon ella y el factor de potencia de entrada total sermuy pequeño. con una corrienteen retraso tan grande, la mayoría de voltaje caerá en los elementos inductivos. En-tonces la impedancia de entrada equivalente es aproximadamente:
|Zeq| =VΦ
IL≈ X1 + XM (2.6)
Para la prueba los datos obtenidos fueron:
VL = 380 VIL = 0,933 AP = 294,5 W
tenemos que
VΦ =VL√
3=
380V√3
= 220V (2.7)
por lo tanto,
|Zeq| =VΦ
IL=
220V
0,933A= 235, 8 Ω (2.8)
Como se conoce X1 entonces:
XM = |Zeq| −X1 = 235, 8 Ω− 9, 1 Ω = 226, 7 Ω (2.9)
2.1.4. Prueba Pérdidas Rotacionales y Núcleo
Esta prueba se hizo en vacío, es decir sin carga alguna por lo que se utilizaron losvalores obtenidos en la prueba en vacío y además se utilizan los valores de pérdidasrotacionales (tanto por fricción con los cojinetes del motor y rozamiento con el aire).
Para hallar las pérdidas rotacionales nos referimos al item 5.5.4 del (IEEE Stan-dard Test Procedure for Polyphase Induction Motors and Generators) el cual dicelo siguiente:

16 Caracterización del motor
Las pérdidas rotacionales (tanto por fricción con los cojinetes del motor y roza-miento con el aire) pueden ser determinadas al desarrollar un análisis de regresiónlineal usando tres o más puntos de la curva de potencia V.S el voltaje al cuadrado.Para determinar las pérdidas por fricción con los cojinetes y el viento se deben restarlas pérdidas I2R (referentes a la resistencia del estatorR1) de las pérdidas totales(es decir de la potencia de entrada) en cada uno de los voltajes de prueba y graficarla curva resultante de pontenciaV.S voltaje, extendiendo la curva a voltaje cero. Laintercepción con el eje de voltaje cero son las pérdidas de fricción y de viento. Losdatos obtenidos de esta prueba para cada voltaje y su correspondiente potencia sepueden observar en la tabla 6.
V Potencia28,2 V 93,4 W51 V 104,2 W70,7 V 130,7 W
Tabla 2.1: Valores de voltaje y su correspondiente potencia en la prueba de pérdidaspor fricción y rozamiento del motor de inducción.
Con los valores de la tabla 6.1 se procedió a realizar la regresión lineal de la siguientemanera:
Primero se realizó la tabla 7.
V oltaje2 Potencia V oltaje2Potencia (V oltaje2)2
795,2 93,4 74271 6323432601 104,2 271024 67652014998 130,7 653238 249800048394 328,3 998533 32377548
Tabla 2.2: Valores de V oltaje2 V.S potencia para realizar el análisis de regresiónlineal.
Los valores de la tabla 7 se utilizaron en la ecuación de regresión lineal definidacomo:
m =n∑V 2i Pi −
∑V 2i
∑Pi
n∑
(V 2i )2 − (
∑V 2i )2
b =
∑Pin−m
∑V 2i
n
Donde m es la pendiente de la recta resultante y b es la intersección con el eje devertical (el eje de potencia). Hay que tener presente que los valores de sumatoriapara cada columna son los correspondientes a la última fila de la tabla 7.

2.1. CIRCUITO EQUIVALENTE: 17
Por lo tanto se tiene,
m =3(998533)− (8394)(328, 3)
3(32377548)− (70459236)= 0, 0014
W
V 2
b =328, 3
3− 0, 0014
8394
3= 105, 4W
La recta de la forma y= mx + b para los anteriores parámetros junto con los valoresde prueba de la tabla 6 se puede observar mejor en la gráfica de la figura 2.4.
Figura 2.4: Grafica con los valores de prueba obtenidos (ViPi) junto con la rectade regresión lineal obtenida para poder hallar las pérdidas por fricción y viento delmotor de inducción.
Entonces por la intersección que se observa en la figura 2.4, se tiene que las pérdidaspor fricción y viento son:
PFyW = b ≈ 105W
Mientras mayor sea la velocidad del motor de inducción, mayores serán las pérdi-das por fricción, por rozamiento con el aire y misceláneas. por otro lado, mientrasmás alta sea la velocidad del motor (hasta nsyn), menores serán las pérdidas enel núcleo. Por los tanto a veces estas tres categorías de pérdidas se agrupan y sedenominan pérdidas rotacionales. Con frecuencia las pérdidas rotacionales totalesde un motor se consideran constantes frente a la velocidad variable puesto que laspérdidas que la componen cambian en direcciones opuestas frente a un cambio develocidad. Además de la gráfica de la figura 2.4 se puede obsevar que la pendiente dela recta es muy pequeña por lo que se pueden asumir estas pérdidas como constantes.
Por lo tanto con la potencia de entrada y corriente que se obtuvo en la pruebade vacío y sabiendo que en vacío la potencia de entrada es consumida en pérdidasmecćanicas y en los devanados del estator,se tiene que:
P = PSCL + Pnucleo + PFyW

18 Caracterización del motor
donde
PSCL = 3(IL)2R1 = 3(0, 933A)(5, 6 Ω) = 14, 6W
Y como se conocen las pérdidas por fricción y viento entonces:
Pnucleo = P − PSCL − PFyW = 294, 5− 14, 6W − 105W = 174, 9W
Entonces para hallar la resistencia del núcleo se utilizan los valores de voltaje ycorriente plena carga. Hay que notar que se van a utilizar valores a plena cargapuesto que ya se había mencionado que las pérdidas por fricción y viento junto conlas pérdidas en el núcleo se asumen constantes para todo el rango de carga, esto serealiza como sigue a continuación.
Del circuito equivalente del motor de inducción de la figura 2.3.b) se tiene que:
E1 = V1 − I1Z1
dondeZ1 = R1 + jX1 = 5, 6 Ω + j9, 1 Ω = 10, 68∠58, 39 Ω
V1 = VΦ = 220V
Y como se sabe de la etiqueta de fabricación del motor el factor de potencia a plenacarga, el cual es
Fp = 0, 9
Entonces el ángulo de retraso de la corriente con respecto al voltaje de fase a plenacarga es:
θ = cos−1FP = 25, 84
Y con
I1 = InL = 2, 7A
Por lo tanto,
E1 = 220V − (2, 7∠25, 84A)(10, 68∠58, 39 Ω) = (218, 9∠− 7, 53V )
Con la magnitud de este voltaje y sabiendo la potencia que consume la resistenciade núcleo, entonces:
RC =3(E1)
2
Pnucleo=
3(218, 9V )2
174, 9W= 824, 7 Ω

2.2. RELACIONES DE POTENCIA EN EL MOTOR 19
Ahora, se pueden observar lo parámetros anteriormente hallados en el circuito equi-valente final (por fase) del motor de inducción sobre el que se trabajó, este circuitose puede apreciar en la figura 2.5.
Figura 2.5: Circuito equivalente por fase con pérdidas por fricción y pérdidas en elnúcleo separadas. [21].
Posteriormente se procede a comprobar si los valores de los parámetros obtenidosarrojan un buen modelo de la máquina de inducción, esto se hace primero corrobo-rando que se cumplan las relaciones de potencia en la máquina y segundo verificandosi se obtienen buenos resultados en la estimación del torque con los parámetros delcircuito obtenido. Las dos formas se hacen a continuación.
2.2. Relaciones de potencia en el motor
Las relaciones de potencia se hacen para el motor operando a plena carga. Parapoder conocer la potencia real que desarrolla el motor a plena carga se debe conocerel valor del torque y velocidad mismo en estas condición. Los valores obtenidos deuna medida directa de estas variables fueron los siguientes:
τ = 2, 83 N ·m
nm = 3416 rpm o ωm =(3416)(2Π)
60= 357, 7 rad/s
La medida directa del torque fue realizada por medio de una galga extensiométricacuya salida es acondicionada por un dispositivo electrónico.

20 Caracterización del motor
Con los anteriores datos se puede hallar la potencia mecánica real suministradapor la máquina, este cálculo se realiza así:
POreal= τ · nm = (2, 83 N ·m)(357, 7 rad/s) = 1012, 3W
La velocidad síncrona del motor a plena carga es
nsinc =(120)(60)
2= 3600 rpm o ωsinc =
(4Π)(60)
2= 376, 9 rad/seg
Por lo tanto su deslizamiento es:
s =3600− 3416
3600= 0, 051
El voltaje aplicado por fase es
VΦ = V1 =VL√
3=
380V√3
= 220V
La impedancia efectiva del rotor con relación al estator es
Z2 =R2
s+ jX2 =
5, 1
s+ j9, 1 =
5, 1
0, 051+ j9, 1 = 100 + j9, 1 Ω
La impedancia del devanado del estator es
Z1 = R1 + jX1 = 5, 6 + j9, 1 Ω = 10, 68∠58, 4 Ω
Puesto que RC, jXM y Z2 están en paralelo, la impedancia equivalente Ze puedecalcularse como sigue:
1
Ze=
1
RC+
1
jXM+
1
Z2=
1
824,7+
1
226, 7+
1
100 + j9, 1
= 0, 0112− j− 0, 0053 S
por lo que
Ze = 73, 06 + j34, 83 Ω
Luego,la impedancia total de entrada es
Zin = Z1 + Ze = 78, 66 + j43, 93 Ω = (90, 1∠29, 18 Ω)
La corriente en el estator es:
I1 =V1
Zin=
220V
(81, 5∠25, 8 Ω)= 2, 43∠− 29, 18 A
La potencia de entrada es

2.2. RELACIONES DE POTENCIA EN EL MOTOR 21
Pin = 3V1I1cosθ = 3(220V )(2, 43A)cos(29, 18) = 1443W
La pérdida en el cobre del estator es:
Pscl = 3I12R1 = 3(2, 43A)2(5, 6 Ω) = 99, 61W
Se tiene que
E1 = V1−I1Z1 = 220V −(2, 43A)∠(29, 18)(10, 68∠58, 4 Ω) = (197, 09∠−3, 69 V )
La corriente por pérdida en el núcleo es:
IC =E1
RC=
197, 09∠− 3, 69 V
824, 7 Ω= 0, 239∠− 3, 69 A
La corriente de magnetización es:
IM =E1
jXM=
197, 09∠− 3, 69 V
j226, 7 Ω= 0, 869∠− 93, 69 A
La corriente de excitanción es:
IΦ = IC + IM = 0, 901∠− 78, 32 A
Por lo tanto la corriente en el rotor es:
I2 = I1 − IΦ = 1, 96∠− 8, 9 A
La pérdida en el núcleo es:
PNucleo = 3IC2RC = 3(0, 239A)2(824, 7 Ω) = 141, 3W
La potencia en el entrehierro es:
PAG = Pin −PSCL −PNucleo = 1443W − 99, 61− 141, 3 = 1158, 3W
La pérdida en el cobre del rotor es:
PRCL = 3I22R2 = 3(1, 96A)2(5, 1 Ω) = 59, 2W
la potencia desarrollada por el eje es:
Pd = PAG −PRCL = 1158, 3− 59, 2W = 1099, 1W
Entonces la potencia de salida es:
PO = Pd −PFyW = 1099, 1− 105W = 994, 06W (2.10)
Esta última se ha obtenido de la potencia que desarrolla el eje del motor menos laspérdidas que se dan por fricción con los cojinetes y el rozamiento con el aire.

22 Caracterización del motor
Con este último resultado se puede ver que se tiene un muy buen modelo de lamáquina puesto que la potencia de salida es muy similar a la que se puede apre-ciar en la etiqueta de fabricación del motor, de hecho, como se puede observar acontinuación :
Er = |POreal−POmedido
POreal
| · 100 % = |1012, 3W − 994, 06W
1012, 3W| · 100 % ≈ 1, 8 %
Por lo cual se incurre en un error relativo de 1,8% de la potencia de salida con elmotor funcionando a plena carga.
2.3. Estimación del torque en el motor
Se puede utilizar el circuito equivalente de un motor de inducción y el diagramade flujo de potencia del motor para deducir una expresión general del par inducidoen función dela velocidad.Como fue mencionado y explicado anteriormente el parinduciado en un motor de inducción está dado por la ecuación:
τ ind =PAG
ωsinc(2.11)
La potencia en el entrehierro es la potencia que cruza el espacio entre el circuito delestator y el circuito del rotor.Remitiéndose al circuito equivalente de la figura 2.6,en él se puede ver que la potencia en el entrehierro que se suministra a una fase delmotor es:
PAG,1Φ = I22
(R2
s
)Por lo tanto la potencia total en el entrehierro es:
PAG = 3I22
(R2
s
)
Figura 2.6: Circuito equivalente por fase con pérdidas por fricción y pérdidas en elnúcleo separadas. [21].

2.3. ESTIMACIÓN DEL TORQUE EN EL MOTOR 23
Si se puede determinar I2, entonces se conoce la potencia en el entrehierro y el parinducido.
Cabe resaltar que para el circuito de la figura 2.6 no se ha incluido la resistencia RC
de las pérdidas en el núcleo puesto que, como se había mencionado anteriormenteestas pérdidas se han tomado como constantes para todo el rango de carga y por ellopueden simplemente ser restadas junto con las pérdidas por fricción y rozamientodel torque inducido.
Aún cuando hay muchas formas de resolver el circuito de la figura 2.6 para calcularla corriente I2, posiblemente la más facil es determinar el equivalente de Theveninde la porción del circuito a la derecha de las X en la figura. Al aplicar este teoremaal circuito equivalente del motor de inducción, el circuito resultante sería una simplecombinación en serie de elementos como se muestra en la figura 2.7.c.
Figura 2.7: a) Voltaje equivalente de Thevenin del circuito de entrada de un motor deinducción. b)Impedancia equivalentede Thevenin del circuito de entrada.c) Circuitoequivalente resultante simplificado de un motor de inducción. [21].
La figura 2.7.a muestra los terminales abiertos que se utilizaron para encontrar elvoltaje de Thevenin. De la regla del divisor de voltaje se tiene:
VTH = VΦZM
ZM + Z1

24 Caracterización del motor
dondeZM=jXM
Z1=R1 + jX1
Entonces
VTH = VΦjXM
R1 + j(X1 + XM)
La magnitud del voltaje de Thevenin VTH es:
VTH = VΦXM√
R12 + (X1 + XM)2
= (220)226, 7√
5, 62 + (9, 1 + 226, 7)2= 211, 4V
La figura 2.7.b muestra el circuito de entrada con el voltaje de entrada en cor-tocircuito. Las dos impedancias están en paralelo y la impedancia de Thevenin estádada por:
ZTH = RTH + jXTH =ZMZ1
ZM + Z1=
jXM(R1 + jX1)
R1 + j(X1 + XM)
Que después de realizar los cálculos quedan
RTH =XM
2R1
R12 + (X1 + XM)2
=(226, 7)(5, 6)
5, 62 + (9, 1 + 226, 7)2= 5, 17 Ω
XTH =XMR1
2 + XMX12 + XM
2X1
R12 + (X1 + XM)2
=(226, 7)(5, 6)2 + (226, 7)(9, 1)2 + (226, 7)2(9, 1)
5, 62 + (9, 1 + 226, 7)2= 8, 87 Ω
El circuito equivalente resultante se muestra en la figura 2.8. En este circuito lacorriente I2 está dada por:
I2 =VTH
ZTH + Z2=
VTH
RTH + R2/s+ jXTH + jX2
Y la magnitud de esta corriente es:
I2 =VTH√
(RTH + R2/s)2 + (XTH + X2)2
Con la ecuación de la potencia en el entrehierro :
PAG = 3I22
(R2
s
)=
3V 2THR2/s
(RTH + R2/s)2 + (XTH + X2)2

2.3. ESTIMACIÓN DEL TORQUE EN EL MOTOR 25
Por lo tanto, el par inducido del rotor está dado por:
τind =PAG
ωsinc=
3V 2THR2/s
ωsinc[(RTH + R2/s)2 + (XTH + X2)2](2.12)
Ahora, para obtener el torque en la carga se debe restar al torque inducido, eltorque generado por las pérdidas rotacionales (las cuales se asumieron constantes).Por lo que se tiene que el par en la carga es
τcarga =3V 2
THR2/s
ωsinc[(RTH + R2/s)2 + (XTH + X2)2]− τProt (2.13)
Donde
τProt =Prot
ωm=
PNucleo + PFyW
ωm=
174 + 105
357, 7= 0, 78 N ·m (2.14)
Figura 2.8: Circuito equivalente de Thevenin para el motor de inducción.
Posteriormente se creó un archivo M de Matlab utilizando el paquete MathworkR2012a para hacer una gráfica de la característica par-velocidad del motor. En elarchivo se utilizaron los valores de VTH , RTH y XTH obtenidos previamente arriba.La gráfica resultante se puede ver en la figura 2.9.
En la figura 2.9 se pueden observar tres puntos de interés, estos son el torque dearranque, el torque máximo y el torque a plena carga, los cuales también se puedencalcular como se explica a continuación.
Puesto que el par inducido es RTH/ωsin, el par máximo posible se presenta cuandola potencia en el entrehierro es máxima; es decir, cuando la potencia entregada alresistor R2/s es máxima, lo cual sucede cuando la magnitud de esta impedancia esigual a la de la fuente, donde la impedancia de la fuente del circuito es:

26 Caracterización del motor
Figura 2.9: Curva Par-Velocidad del motor de inducción por medio del circuitoequivalente de Thevenin sin la resistencia del núcleo [28].
Zfuente = RTH + jXTH + jX2
Por lo que potencia máxima se presenta cuando
R2
s=√RTH
2 + (XTH2 + X2
2)
Y al resolver la anterior ecuación se puede ver que el deslizamiento para el parmáximo está dado por:
smax =R2√
RTH2 + (XTH
2 + X22)
=5, 6√
5, 172 + (8, 872 + 9, 12)(2.15)
smax = 0, 2727
Con este valor de deslizamiento el rotor de la máquina se encuentra a una velocidadde
nτmax= (1− smax)nsin = (1− 0, 2727)(3600) = 2618, 3 rpm
Entonces, el par máximo se ecnuentra insertando la anterior ecuación en la ecuacióndel par (ecuación 57). Después de realizar el despeje la ecuación resultante del parmáximo es:
τmax =3V 2
TH
2ωsinc[RTH +√RTH
2 + (XTH + X2)2]− τprot (2.16)
τmax =3(221, 4)2
2(3600)[5, 172 +√
5, 172 + (8, 872 + 9, 12)]= 7, 41− 0, 78

2.3. ESTIMACIÓN DEL TORQUE EN EL MOTOR 27
τmax = 6,623N ·m
Entonces, se tiene el torque máximo cuyas coordenadas son:
(nτmax, τmax) = (2618, 6,623)
El otro punto de interés es el torque de arranque, el cual se encuentra estableciendoel deslizamiento s=1 en la ecuacion del par, el cual tiene el valor de:
τarranque =3V 2
THR2
ωsinc[(RTH + R2)2 + (XTH + X2)2]− τprot (2.17)
τarranque =3(211, 4)(5, 6)
(3600)[(5, 17 + 5, 6) + (8, 87 + 9, 1)2]= 4, 21− 0, 78
τarranque = 3, 43N ·m
Como el deslizamiento es s=1 entonces la velocidad del rotor del máquina es cero(ωm=0). Por lo tanto, se tiene el par de arranque cuyas coordenadas son:
(narranque, τarranque) = (0, 3, 43)
Por último, se tiene el punto de torque a plena carga el cual se encuentra a lavelocidad del rotor en donde la máquina funciona a las condiciones nominales decorriente y voltaje. Como fue mencionado anteriormente, se hizo la medida de estavariable cuyo valor fue:
npcarga = 3416 rpm
Y con esta velocidad se tiene un deslizamiento de:
s =nsin − npcarga
nsin=
3600− 3416
3600= 0, 0511
Al reemplazar este valor de deslizamiento en la ecuación del par (ecuación 58), seobtiene un par de:
τpcarga = 2, 32N ·m
Por lo tanto se tiene el par a plena carga cuyas coordenadas son:
(npcarga, τpcarga) = (3416, 2, 32)
De la anterior coordenada se puede obtener la potencia a plena carga así:
PO = τpcarga · .ωpcarga = (2, 58)(357, 7) = 922, 86 W
Pero este valor no coincide con el de la ecuación 2.10. la razón es por que el par in-ducido (ecuación 2.13) se obtuvo del circuito equivalente del motor sin la resistenciadel núcleo RC y la potencia de salida si fue calculada teniendo presente la resistenciaRC como parte del circuito equivalente.

28 Caracterización del motor
Entonces, teniendo presente a RC en el circuito equivalente y haciendo el análi-sis de Thevenin como en el caso anterior se obtuvieron las nuevas ecuaciones paraVTHRTH, XTH, las cuales son:
VTH = VΦXMRC√
(RCR1 −XMX1)2 + (XMRC + XMR1 + X1RC)2
RTH =XMRCR1(−RCR1 + XMX1 + XMRC + XMR1 + R1RC)
(RCR1 −XMX1)2 + (XMRC + XMR1 + X1RC)2
XTH =XMRCR1(RCR1 −XMX1 + XMRC + XMR1 + R1RC)
(RCR1 −XMX1)2 + (XMRC + XMR1 + X1RC)2
Reemplazando los valores de los parámetros del circuito equivalente en estas tresecuaciones, se obtiene:
VTH = 209, 54 V
RTH = 5, 278 Ω
XTH = 5, 417 Ω
Posteriormente se usan estos valores en la ecuación del par en la carga (ecuación2.13), y teniendo presente que las pérdidas en el núcleo ya hacen parte del circuitoequivalente de Thevenin, entonces en este caso
τProt =Prot
ωm=
PFyW
ωm=
105
357, 7= 0, 293 N ·m (2.18)
Se procede a graficar de nuevo la curva par-velocidad y se observan los mismo trespuntos de par de arranque, máximo y a plena carga en la figura 2.10.
Se pueden calcular de nuevos los tres mismos puntos que en el caso anteriorl, tenien-do presente que τProt es el de la ecuación (2.18).

2.3. ESTIMACIÓN DEL TORQUE EN EL MOTOR 29
Figura 2.10: Curva Par-Velocidad del motor de inducción por medio del circuitoequivalente de Thevenin con la resistencia del núcleo. [28].
Usando de nuevo el deslizamiento a plena carga (s=0,0511) se pueden obtener lasnuevas coordenadas del par plena carga
(npcarga, τpcarga) = (3416, 2, 79)
Con ello valor de la potencia de salida
PO = τpcarga · .ωpcarga = (2, 79)(357, 7) = 944, 4 W
El cual, sí coincide con el valor de la ecuación (2.10). Por eso, aunque los cálcu-los son más tediosos teniendo presente la resistencia del núcleo, son más precisos enrelación con la potencia de salida del motor.
Para obtener las coordenadas del par máximo se usan las ecuaciones (2.15) y (2.17)con lo cual se obtiene
(nτmax, τmax) = (2412, 8, 13)
También se pueden calcular las coordenadas del par de arranque con la ecuacion(2.17) obteniendo
(narranque, τaranque) = (0, 5, 30)
Las tres nuevas coordenadas se pueden observar en la figura 2.10.

30 Caracterización del motor
2.4. Medida directa del torque
Con objeto de corroborar una estimación adecuada del torque en el motor de induc-ción, se realizó una medida directa del torque a través de una galga extensiométricay esta se comparó con la medida obtenida por el Estimador de torque Electrónico(ETE). Esta compración se hizo para varias velocidades en la zona de trabajo nor-mal de la máquina, es decir en la zona o el rango de trabajo comprendido entre elpunto de operación sin carga y momento de torsión nominal (o par a plena carga).
2.4.1. Medida por medio de galga extensiométrica
Primero que todo para poder observar la variación del torque en el motor de induc-ción se debe conectar este a una carga mecánica variable, para este caso se usó unacarga mecánica didáctica la cual fue un freno electromagnético. El freno electromag-nético es un motor de corriente directa el cual incrementa su capacidad de frenadocon forme se aumenta el voltaje DC en los terminales este. El freno electromagéticocon el que se cuenta en el laboratorio es el DL1019M de la familia DE LORENZO.El freno electromagnético se muestra en la figura 2.11.a) y sus terminales se puedenobservar con más detenimiento en la figura 2.11.b). Por otro lado forma de conexiónal motor se ve en la figura 2.12.
Figura 2.11: Freno electromagnético. a) Freno de la familia DELORENZO.b) Ter-minales de suministro DC al motor. [30].
Posteriormente se conectó la galga extensiométrica al freno electromagnético como semuestra en la figura 2.13. Se utilizó la gala extensiométrica y sus respectivo equipo deacondicionamiento de señal DL2006C DE LORENZO (figura 2.14) el cual visualizael par o momento de torsión en su pantalla de 7 segmentos.
Esta galga extensiométrica se calibra con el motor funcionando en vacío y a suvoltaje nominal. Para que el la carga mecánica no actúe con freno alguno, el frenoelectromagnético debe tener cero voltios en sus terminales. Cuando el motor se hallevado hasta su voltaje nominal el equipo en donde se proyecta el par debe arrojar0 N· m, si este valor se encuentra por debajo o por arriba de cero entonces se utilizaun potenciometro que tiene el acondicionador y se lleva este valor hasta cero. Eneste instante el equipo medidor de torque está calibrado y se puede proceder a subir

2.5. MEDIDA DIRECTA V.S ESTIMACIÓN DEL TORQUE 31
Figura 2.12: Motor de inducción conectado al freno electromagnético. [30].
Figura 2.13: Galga extensiométrica conectada al freno electromagnético [30].
la carga mecánica en el eje del motor incrementado el voltaje DC en los terminalesdel freno electromagnético.Los valores obtenidos en el laboratorio del torque para diferentes velocidades alvariar la carga mecánica se pueden observar en la tabla 8.
2.5. Medida directa V.S Estimación del TorqueLuego se creo un archivo M de Matlab utilizando el paquete Mathwork R2012a y segraficaron estos valores del torque V.S velocidad junto a las gráficas de Par-velocidadde (figura 2.15 y 2.16) obtenidas por medio del modelo de circuito equivalente deThevenin. Estas gráfica superpuestas se pueden observar en la figura 39 y 40 juntocon un zoom para poder observar detenidamente los coordenadas de la tabla 8.En las gráficas se puede apreciar que la que más se a cerca o más precision tiene conrespecto a los datos obtenidos en el laboratorio es la curva Par-velocidad obtenidapor medio del modelo que tuvo en cuenta la resistencia del núcleo en el circuitoequivalente de Thevenin.

32 Caracterización del motor
Figura 2.14: Acondicionador y visualizador de la señal enviada por la galga esten-siométrica. [30].
Torque (N ·m) Velocidad Angular (rpm)2,83 34162,52 34462,23 34671,96 34811,67 35001,44 35151,21 35330,99 35450,79 35510,48 35640,35 35690,25 35740,18 35820,13 35850,11 3586
Tabla 2.3: valores de torque V.S velocidad angular medidos por medio de la galgaextensiométrica

2.5. MEDIDA DIRECTA V.S ESTIMACIÓN DEL TORQUE 33
Figura 2.15: Coordenadas del Par-velocidad de la tabla 8 graficadas y superpuestasa la curva para velocidad de la figura 17 (modelo de Thevenin sin RC). a) Tamañocompleto de la curva par velocidad. b) Zoom para observar lo puntos de la tabla(línearoja). [28].
Figura 2.16: Coordenadas del Par-velocidad de la tabla 8 graficadas y superpuestasa la curva para velocidad de la figura 18 (modelo de Thevenin con RC). a) Tamañocompleto de la curva par velocidad. b) Zoom para observar lo puntos de la tabla(línearoja). [28].

Capítulo 3
Diseño Electrónico
Posterior a la caracterización del motor de inducción se procedió a diseñar el sistemaelectrónico que permitiera obtener y procesar las dos de la variables concernientescon la estimación del torque, estas son: potencia de entrada a la máquina y velocidadangular del rotor.
3.1. Circuito para obtención de potencia deentrada (3VΦILCosθ)
Para la obtención de la potencia de entrada al motor se debe conocer el voltaje delínea (o de fase), la corriente de línea y el ángulo de desfase entre el voltaje y lacorriente para posteriormente poder aplicar el producto de estas por un facto detres y así poder obtener la potencia total de entrada a la máquina. La obtención deestas tres variables se explica a continuación.
3.1.1. Circuito para obtención de voltaje de fase (VL)
El voltaje de fase con el que es alimentada la máquina de inducción es considerable-mente alto como para ser ingresado a un sistema microprocesado (microcontrolador).Es por ello que debe ser primero atenuado y subido de nivel tal cual que se encuentrea una escala de cero a cinco voltios. esto se hizo de la siguiente manera:
La manera más comunmente usada para reducir un nivel grande voltaje es pormedio de un transformador. Pero cuando este reductor de voltaje requiere ser colo-cado dentro de un dispositivo con más funciones, esta solución deja de ser prácticapor el peso y el tamaño del transformador. Por ello se optó por realizar primeroun divisor de voltaje para reducir el voltaje de fase a un nivel pequeño y despuésse unio junto con un nivel de voltaje DC (proveniente del mismo microcontrolador)en un configuración especial, esta configuración de reductor y subidor de nivel DCse muestra en la figura 3.1, en donde el circuito que se encuentra entre las X es eldividor de voltaje y despues de la X (circuito en forma de cruz) es el subidor de nivel.
34

3.1. CIRCUITO PARA OBTENCIÓN DE POTENCIA DE ENTRADA (3VΦILCOSθ)35
Figura 3.1: Circuito divisor y subidor de nivel para posterior procesamiento en elmicrocontrolador.
El diseño del divisor y del voltaje y el subidor de nivel es como sigue a continuación:
Se tiene que
Vφ = 220 V
Por lo tanto el voltaje pico de entrada es
VIP =√
2Vφ = 310, 3 V P
Con el divisor de voltaje se reduce este voltaje hasta un valor pico de
VOP= 10 V P
Las resistencias para este divisor de voltaje se relacionan por medio de la ecuacion:
Ra = Rb
(VIP
VOP
− 1
)Al asumir un valor de Rb = 10 KΩ, se obtiene el valor de la resistencia Ra:
Ra = 10
(310, 3
10− 1
)= 301, 1 KΩ
Posteriormente, para encontrar el voltaje de salida Vout del circuito dela figura18 se aplica el teorema de superposición. Con ello se obtiene la siguiente ecuaciónpunto pendiente:
36 Diseño Electrónico
Vout =
(RZ||RX
RZ||RX + RY
)︸ ︷︷ ︸
m
VOP+
(RY||RZ)VCC
RX + RY||RZ︸ ︷︷ ︸b
(3.1)
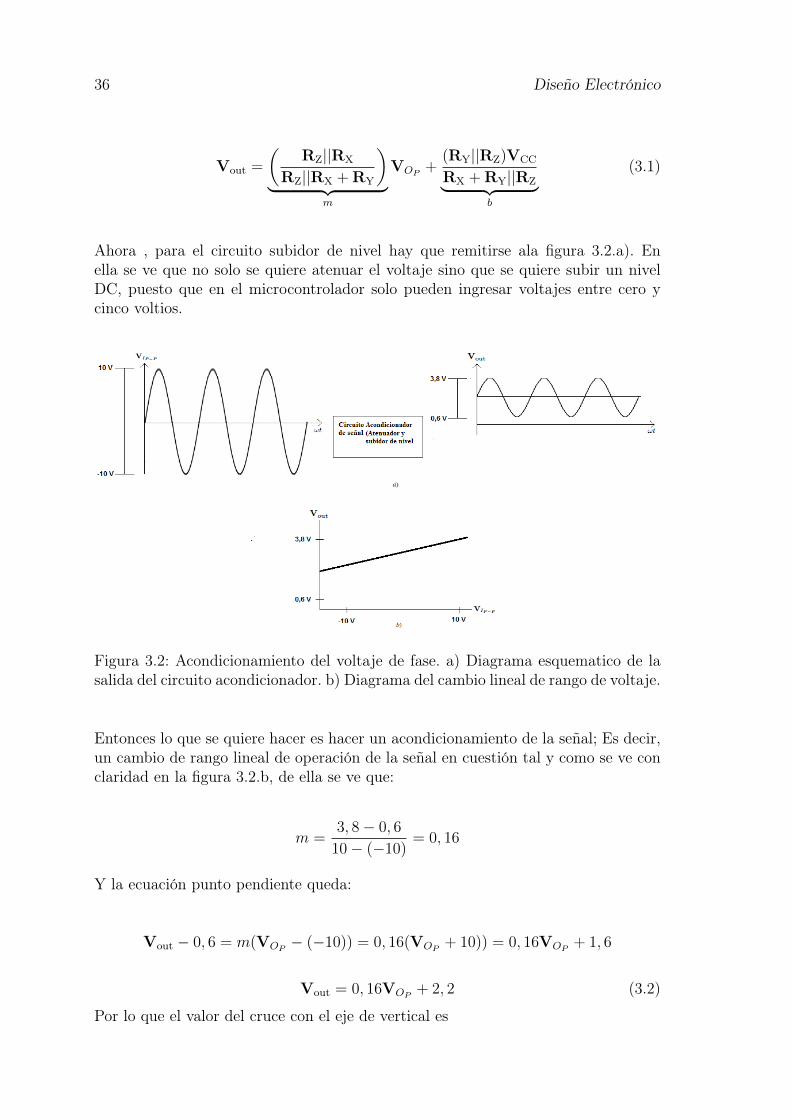
Ahora , para el circuito subidor de nivel hay que remitirse ala figura 3.2.a). Enella se ve que no solo se quiere atenuar el voltaje sino que se quiere subir un nivelDC, puesto que en el microcontrolador solo pueden ingresar voltajes entre cero ycinco voltios.
Figura 3.2: Acondicionamiento del voltaje de fase. a) Diagrama esquematico de lasalida del circuito acondicionador. b) Diagrama del cambio lineal de rango de voltaje.
Entonces lo que se quiere hacer es hacer un acondicionamiento de la señal; Es decir,un cambio de rango lineal de operación de la señal en cuestión tal y como se ve conclaridad en la figura 3.2.b, de ella se ve que:
m =3, 8− 0, 6
10− (−10)= 0, 16
Y la ecuación punto pendiente queda:
Vout − 0, 6 = m(VOP− (−10)) = 0, 16(VOP
+ 10)) = 0, 16VOP+ 1, 6
Vout = 0, 16VOP+ 2, 2 (3.2)
Por lo que el valor del cruce con el eje de vertical es

3.1. CIRCUITO PARA OBTENCIÓN DE POTENCIA DE ENTRADA (3VΦILCOSθ)37
b = 2, 2
Por lo tanto igualando estos valores de la ecuación punto pendiente con los de laecuación (3.1), se tiene que:
m = 0, 16 =
(RZ||RX
RZ||RX + RY
)(3.3)
b = 2, 2 =(RY||RZ)VCC
RX + RY||RZ(3.4)
Al resolver (3.3) y (3.4) para las resistencias RX y RZ se obtienen las siguientesecuaciones:
RZ =mRYVCC
VCC(1−m)− b(3.5)
RX =RYRZ
RZ(1−m)−mRY(3.6)
Al hacer RY = 1 MΩ con VCC = 4,4 (provenientes del microcontrolador) y re-emplazar en (3.5) se tiene
RZ = 470, 59 KΩ (3.7)
y con estos valores Ry y Rz reemplazados en (3.6) se obtiene
RX = 320 KΩ (3.8)
Por último como
VIP
VOP
=310, 3
10= 31, 03
Y utilizando la ecuación (3.2) el voltaje de salida en función del voltaje de entradaqueda
Vout =
(1, 6
310, 3
)VIP + 2, 2 (3.9)

38 Diseño Electrónico
Posteriormente se utilizaron los valores de las resistencias halladas para simularla respuesta del circuito. Esto se hizo por medio de la version Demo del simuladorde circuitos ISIS de Proteus. La implementación del circuito se observa en la figura3.3.a) y su respectiva respuesta en la figura 3.3.b).
Figura 3.3: Circuito Atenuador y elevador nivel DC Simulado a) Implementacion enel simulador. b) respuesta del circuito.
Por otro lado se implementó el mismo circuito de la figura 3.3.a) en el laboratorio, ycon la entrada de voltaje que se ve en la figura 3..a) se obtuvo la señal de salida quese observa en la figura 3.4.b). Estas medidas fueron realizadas con ayuda del oscilos-copio de la mraca Rigol. El voltaje de entrada fue medido con una sonda atenuadacon un factor de atenuación de 10.
De la figura 21.a) se pueden observar los siguientes valores:
VIP = 30, 4 V P
Como existe un factor de atenuación de 10, entonces el voltaje pico real de entradaes:
VIRealP = 304 V P
Esta señal de entrada tiene un nivel DC aproximadamente de 0 voltios.

3.1. CIRCUITO PARA OBTENCIÓN DE POTENCIA DE ENTRADA (3VΦILCOSθ)39
Figura 3.4: Repuesta del circuito atenuador y subidor de nivel DC medida en ellaboratorio. a) Entrada de voltaje al circuito. b) Salida de voltaje del circuito.
Por otro lado, de la figura 21.b) se pueden ver los valores
VOP=
VOP−P
2=
2, 64 V P
2= 1, 32 V P
Nivel DC = Vavg = 1, 9 V
Por lo tanto, tal como se obtuvo (3.9), el voltaje de salida real en función del voltajede entrada es
VOutReal = KVIP + 1, 9 (3.10)
Donde
K =VOP
VIP
=1, 32
304
Esta señal junto con la de corriente de línea, angulo de fase y velocidad angular sonprocesadas en el micrconcontrolador como se explicará posteriormente.

40 Diseño Electrónico
3.1.2. Circuito para obtención de corriente de línea (IL)
Para la obtención de esta variable fue necesario el uso de un sensor de corriente, elcual tiene una conversión lineal de voltaje a corriente.En el mercado se encuentra disponible el módulo que incorpora en una sola baquelaya todos los elementos necesarios (condensadores y resistencias) para el uso correctode este sensor.
El sensor utilizado fue el ACS712, cuyo módulo en donde se encuentra incorporadoeste sensor, se puede observar con más detenimiento en la figura 3.5.a). Los pinesde conexión se muestran en la figura 3.5.b). En la figura se ve que solo es necesa-rio polarizar el sensor a 5V o más comunmente el suministro de un microcontrolador.
Este sensor cuenta con tres versiones según el rango de corriente que se desee medir(30, 20 ó 5 A). puesto que la corriente máxima con la que trabaja el motor es de 2,7A (corriente a plena carga), se escogió el sensor de 5 A para obtener una salida demayor resolución, y tiene la pendiente de su funcíon de transferencia que se puedever en la figura 3.6.
Figura 3.5: Sensor de corriente ACS712. a) Módulo donde seencuentra ya condicio-nado el sensor.b) Esquema de conexión de pines del sensor.
De la figura 3.6 se puede obtener su ecuación punto pendiente o relación de conver-sion Corriente-voltaje como sigue a continuación:
La pendiente es
m =(3, 5− 1, 5)V
(5− (−5))A= 0, 2 V/A
Entonces la función de transferencia queda
VIOUT − 1, 5 = m(Ip − (−5)) = 0, 2(Ip + 5)

3.1. CIRCUITO PARA OBTENCIÓN DE POTENCIA DE ENTRADA (3VΦILCOSθ)41
Figura 3.6: Función de transferencia del sensor.
VIOUT = 0, 2Ip + 2, 5
Donde b = 2,5 es el nivel DC de la salida de voltaje del sensor que es exactamentela mitad de la polarización del sensor.
Pero como se mencionó anteriormente el microcontrolador suministra en realidad4,4 V, con lo cual cambia el nivel DC de la señal de salida a 2,2 V y el voltajemáximo de salida del sensor queda:
VIOUTmax = 2, 2 ∗ 2− 1, 5 = 2, 9 V
Por lo tanto, la nueva pendiente es
m2 =(2, 9− 1, 5)V
(5− (−5))A= 0, 14 V/A
Entonces, la ecuación punto pendiente real de la salida del sensor polarizado a 4,4V es:
VIOUTreal − 1, 5 = m2(Ip − (−5)) = 0, 14(Ip + 5)
VIOUTreal = 0, 14Ip + 2, 2 (3.11)
Por último se simuló por medio de la versión Demo del simulador de circuitos ISIS deProteus, el funcionamiento del sensor con una corriente igual al valor de la corrientenominal de la máquina. La implementación del circuito se observa en la figura 3.7.a)y la respuesta del circuito en la figura 3.7.b).
Por otro lado también se polarizó el sensor de corriente de la figura 3.5.a) en ellaboratorio y se midió su salida de voltaje para un corriente rms de entrada de 2Amperios (medida por medio de un multímetro digital). La salida de voltaje (medidapor el oscilocopio Rigol) se observa en la figura 3.8.

42 Diseño Electrónico
Figura 3.7: Sensor de corriente ACS712. a) Módulo donde seencuentra ya condicio-nado el sensor.b) Esquema de conexión de pines del sensor.
Puesto que la corriente de entrada es
IIrms = 2 A
Se tiene queIP =
√2IIrms = 2, 82 V P
Reemplazando este valor pico tanto positivo como negativo en la ecuación (3.11) seobtiene
VIOUTmax = 0, 14(2, 82) + 2, 2 = 2, 59 V
VIOUTmin = 0, 14(−2, 82) + 2, 2 = 1, 8 V
Ahora, estos valores VIOUTmaxy VIOUTmin
son muy similares a Vmax y Vmin de lafigura 3.7.b) respectivamente. Por lo tanto la ecuacion del voltaje real en función dela corriente de entrada es la misma que la ecuación (74).
3.1.3. Circuito para obtención de ángulo de fase (θ)
Para la obtención del ángulo de desfase entre el voltaje y la corriente de línea fuenecesario utilizar las señales previamente obtenidas y procesarlas como se explica acontinuación:Para conocer el ángulo de desfase entre dos señales es necesario saber la diferenciade tiempo que tarda cada una de ellas en cruzar por su voltaje de referencia (nivelDC), Para ello, primero se debe comparar cada una de las señales con su nivel dereferencia utilizando amplificadores operacionales. Como lo indican las ecuaciones

3.1. CIRCUITO PARA OBTENCIÓN DE POTENCIA DE ENTRADA (3VΦILCOSθ)43
Figura 3.8: Respuesta del sensor de corriente ACS712 medida en el laboratorio
(3.10) y (3.11) las señales de voltaje y corriente tienen un nivel de referencia de 2,2V, por lo cual la configuración del circuito comparador queda como se muestra enla figura 3.9.a).
Figura 3.9: Circuito comparador de voltaje y corriente de línea. a) Circuito compara-dor implementado con Amplificadores operacionales. b) Señales digitales de voltajey corriente resultantes.
De la figura 3.9.a) se puede observar que los amplificadores operacionales son polari-zados con VCC y tierra (ambos voltajes provenientes del microcontrolador), puestoque se quieren obtener señales digitales para ser posteriormente procesadas por elmismo microcontrolador.
Con el fin de procesar únicamente una señal en el microcontrolador, las señales VC
e IC de la figura 3.9.b) son comparadas a través del circuito digital que se muestraenl a figura 3.10.a) y cuya salida es la señal VIC (abajo) en la figura 3.10.b).
Por último se simuló por medio de la versión Demo del simulador ISIS de proteus,el funcionamiento del circuito de comparación en serie con el circuito digital paraobservar la señal digital de salida VIC. La implementación del circuito se observa

44 Diseño Electrónico
Figura 3.10: Circuito digital para comparar la señal de voltaje y corriente VC e IC.a)Implementación del circuito. b) Respuesta donde se puede observar la difencia detiempo de las señales.
en la figura 3.11 donde las señales VC e IC son las provenientes de los circuitos de lafigura 3.4.b) y 3.8 respectivamente. La respuesta del circuito junto con señales VC eIC se puede observar en la figura 3.12. Para la señal de corriente se utiliza un ángulo60 grados en atraso con respecto al voltaje como prueba al circuito. A demás cabeseñalar que con objeto de solo utilizar el voltaje del microcontrolador se obtuvieronlos 2,2 V de un divisor de voltaje con las dos resistencias de igual valor (RM y RN)que se pueden ver también la figura 3.11.
Figura 3.11: Circuito comparador en serie con el circuito digital para obtener elángulo de desfase entre el voltaje y la corriente de línea. [22].
El circuito de la figura 3.9.a) también fue implementado en el laboratorio y su res-puesta medida por medio del osciloscopio Rigol. La corriente y voltajes de pruebas seobtuvieron del motor en funcionamiento en vacío. La señal de corriente junto con sucorrespondiente seãl de cruce por su nivel DC se puede observar enl a figura 3.13.a).La señal de Voltaje junto con su señal de cruce por su nivel DC se puede ver en lafigura 3.13.b).

3.1. CIRCUITO PARA OBTENCIÓN DE POTENCIA DE ENTRADA (3VΦILCOSθ)45
Figura 3.12: Respuesta del circuito para obtención del ángulo de desfase entre elvoltaje y la corriente de línea.
Figura 3.13: Señales de salida del circuito comparador. a) Señal de corriente con suseñal de cruce por nivel DC. b) Señal de voltaje junto con su señal de cruce por nivelDC.
Posteriormente se implementó el circuito digital de la figura 3.10.a) y se midió surespuesta a las señales de cruce por cero tanto de voltaje y corriente. En la figura3.14.a) se puede observar las señales superpuestas y en la figura 3.14.b) la salida delcircuito digital.
Por último, el valor de tiempo que hay entre flanco de subida y bajada de la señal dela figura 3.14.b) se multiplica por le frecuencia angular (en rad/s) del suminstrio depotencia para obtener el ángulo (θ) de desfase entre el voltaje y la corriente, como

46 Diseño Electrónico
Figura 3.14: Señal de ángulo de desfase entre corriente y voltaje de línea. a) Señalesde curce por nivel DC de voltaje(Amarilla) y corriente(azul) superpuestas. b) Señalde salida del circuito digital.
lo expresa la siguiente ecuación
θ = ωt = 2Πft, f = 60hz (3.12)
3.2. Circuito para obtención de la velocidad angular(nm)
Para la obtención de esta variable fue necesario el uso de un sensor de obstáculosinfrrarojo. En el mercado se encuentra disponible el módulo que incorpora en unasola baquela ya todos los elementos necesarios (condensadores y resistencias) parael uso correcto de este sensor.
El sensor utilizado fue el IR FC-51, cuyo módulo en donde se encuentra incorporadoeste sensor se puede observar con más detenimiento en la figura 3.15.a). Los pines deconexión de muestran en la figura 3.15.b). En la figura 33.b) se ve que solo es necesa-rio polarizar el sensor a VCC (en este caso 4,4 V provenientes del microcontrolador).
Al confrontar el sensor infrarrojo contra el eje del rotor de forma longitudinal comose ve en la figura 3.16, el emisor del sensor envía un haz de luz (invisible al ojohumano). Esta señal rebota o es devuelta hacia el receptor del sensor si el eje delmotor cuenta con una cinta reflectora.
Desde que es polarizado el sensor, el emisor de este está continuamente enviando elhaz de luz, en el instante en que este haz pasa por la cinta reflectora, este se devuel-ve hacia el recepetor y un “1” lógico aparece a través del pin Out del modulo del

3.2. CIRCUITO PARA OBTENCIÓN DE LA VELOCIDAD ANGULAR (NM)47
Figura 3.15: Sensor de obstáculos infrarrojo IR FC-51. a) Módulo donde se encuentraya acondicionado el sensor. b) Esquema de conexión de pines del sensor.
Figura 3.16: Funcionamiento del sensor infarrojo para medir velocidad angular deun eje giratorio.
sensor. Cuando el haz de luz deja de pasar por la cinta reflectora ahora un “0” lógicoaparece en a través del pin out. Como se puede visualizar en la figura 3.16, el “1” ló-gico es reconocido como un flanco de subida y el “0” lógico como un flanco de bajada.
El tiempo entre el flanco de subida y el flanco de bajada ∆t indica la rapidez conla que se mueve la cinta reflectora y como esta sen encuentra adherida al eje delmotor, por ende también indica la velocidad de este. Entonces ∆t es utilizado parahallar la frecuencia o la velocidad angular del rotor en revoluciones por minuto conla siguiente ecuación
frotor = 60
(1
∆t
)(rpm) (3.13)
Y la velocidad angular en (rad/s) se halla con la ecuación
ωrotor =2Π
∆t(rad/s)

Capítulo 4
Instrumentación e Interfaz porSoftware
En los tiempos recientes resulta necesario y casi indispensable procesar las señales atraves de sistemas microprocesados; ya sea, para obtener resultados casi instantáneosy/o para poder guardar dichos resultados en una memoria de fácil y rápido acceso.Es por ello que las señales que previamente se obtuvieron de las variables (VL, IL, θy nm) fueron procesadas a través de un microcontrolador (µC) para posteriormentedesplegar y visualizar el resultado del torque en una pantalla de forma numérica ygráfica. Este procedimiento se explica detalladamente a continuación.
4.1. Procesamiento de las señales
Para el desarrollo de este proyecto se utilizó el µC o sistema embebido1 PSoC oProgramable System on Chip en inglés de la familia Cypress Semiconductor. Enparticular se usó el µC PSoc 5LP el cual se muestra en la figura 4.1 junto con lospines que lo conforman.
Posterior a la selección del µC a usar, se procedió a realizar los algoritmos paraposterior implementación de las líneas de código de procesamiento de las señales.Los algoritmos individuales junto con la implemantación del código para la manipu-lación de cada una de las variables se hizo como se explica continuación.
1Es un sistema de computación diseñado para realizar una o algunas pocas funciones dedicadas,frecuentemenete en un sistema de computación en tiempo real
48

4.1. PROCESAMIENTO DE LAS SEÑALES 49
Figura 4.1: Microcontrolador PSoC5LP de la familia Cypress usado para el proce-samiento de las señales.
4.1.1. Algoritmo para obtención TrueRMS del voltaje y lacorriente de línea
Usualmente cuando se busca el valor rms de una tensión alterna lo que hace es tomarel valor pico y dividirlo por raíz de dos (VP/
√2). El valor rms obtenido así no es una
constante física, sino que es el resultado de un cálculo más complejo en base a lafórmula del valor eficaz con su integral, tal como se muestra en la siguiente ecuación.
veficaz =
√1
T
∫ t0+T
t0
f 2(t)dt
Hay que tener en cuenta que el resultado (VP/√
2) solo servirá para una funciónseno, pero si la forma de onda que se está midiendo no es senoidal (por ejemplo: unaseñal con ruido, la señal de una carga inductiva de potencia, la señal de una variadorde frecuencia, de un dimmer, etc.) no sevirá la fŕmula (VP/
√2). Esto quiere decir
que se debería realizar un anális de la funcón y una vez que se llegara a la funciónse podría aplicar la integral y demás, pero la realidad es que esto no es algo útilpara un instrumento de medición. Entonces se debe encontrar la manera para que

50 Instrumentación e Interfaz por Software
el instrumento de medición pueda medir cualquier forma de onda y saber el valoreficaz para que arroje el valor TrueRMS de la misma.
Por suerte existe una forma discreta de obtener el valor TrueRms, la cual consiste enaplicar la siguiente fórmula de la raíz de la sumatoria de los cuadrados de la mediacomo se ve en la siguiente ecuación.
Vrms =
√√√√ 1
N
N∑i=1
v2i =
√v2
1 + v22 + ...+ v2
N
N(4.1)
Esta fórmula dará el mismo resultado que la fórmula de la integral, pero para utilizarla fŕmula debemos tomar varias mediciones de la señal “Discretizar” tomando muchasmediciones de la misma y cada medición será elevada al cuadrado, sumada con lasiguiente y al finalizar todas las mediciones “Muestreo” se dividirá esa suma por lacantida de muestras y se aplicara la raíz cuadrada. La precisión de la misma seráfunción de la cantidad de muestras que se tomen (figura 4.2).
Figura 4.2: Discretización y muesteo de la señal para obtener su valor TrueRms.
Hay que también tener presente que lo primero que se debe hacer una vez ingresa laseñal al ADC (Convertidor Analógico Digital) del µC (y poder realizar la operacio-nes previamente explicadas) es multiplicarla y sumarles los factores necesarios parareconocerla como la señal original del suministro de potencia. En realidad solo hayque despejar el voltaje y la corriente de línea de entrada de las ecuaciones (3.10) y(3.11), con lo cual se tiene:
VIP =304(VOutReal − 1, 9)
1, 32(4.2)
Ip =VIOUTreal − 2, 2
0, 14(4.3)
El anterior proceso para la obtención del valor TrueRms de las señales de volta-je y corriente a través del µC se podrá comprender mejor al observar el algoritmo odiagrama de flujo de la figura 4.3.

4.1. PROCESAMIENTO DE LAS SEÑALES 51
Figura 4.3: Algoritmo (Diagrama de flujo) para obtención del valor TrueRms delvoltaje y corriente de línea.
Las líneas de codigo implementadas del anterior algoritmo se encuentran en losanexos.
4.1.2. Algoritmo para obtención del Factor de potencia y Po-tencia de entrada
Para la obtención del ángulo de adelanto de la corriente respecto al voltaje solobasta con tomar el tiempo ∆t entre el flanco de subida y bajada que se aprecia en lafigura 3.14.b), luego se aplica la ecuación (3.12) y posteriormente se aplica la funcionconseno al valor del ángulo hallado. Esto se debe hacer en un módulo Timer del µC.
Para obtener el valor de la potencia de entrada se realiza el producto del factorde potencia por el valor TrueRms del voltaje y la corriente previamente hallados. El

52 Instrumentación e Interfaz por Software
procedimiento completo se puede entender mejor al observar el algoritmo (diagramade flujo) de la figura 4.4.
Figura 4.4: Algoritmo (Diagrama de flujo) para obtención del ángulo de desfase entreel voltaje y la corriente.
Las líneas de codigo implementadas del anterior algoritmo se encuentran en losanexos.
4.1.3. Algoritmo para obtención de la velocidad angular yEstimación del Torque
Para obtener el valor estimado del torque primero se debe hallar la velocidad angulardel rotor del motor. Luego se debe calcular el deslizamiento al que se encuentra elrotor a esa velocidad y por último aplicar la ecuación del par en la carga (ecuación(2.13)).

4.1. PROCESAMIENTO DE LAS SEÑALES 53
Cabe aclarar que (como se explicó previamente) la ecuación del par puede ser laque incluya o no la resistencia del núcleo (RC) para el circuito equivalente de The-venin. Lo mismo sucede para el torque de las pérdidas rotacionales; es decir, si en laecuación del par no se incluye RC entonces se debe usar la ecuación (2.14) y si porel contrario sí se incluye, entonces se usa la ecuación (2.18).
La velocidad se debe hallar con la señal entregada por el sensor infrarrojo. En esencialo que se debe hacer es tomar el tiempo ∆t entre el flanco de subidad y bajada de laonda cuadrada que se aprecia en la figura 3.16, luego se obtiene la velocidad angularen rpm aplicando la ecuación (3.13), despues se obtiene el deslizamiento a la velo-cidad obtenida y por último se calcula el torque a este valor de deslizamiento. Estotambién se debe hacer en un módulo timer del µC y el algoritmo para realizar es-te procedimiento y calcular el valor estimado del torque se puede ver en la figura 4.5.
Figura 4.5: Algoritmo (Diagrama de flujo) para obtención de la velocidad angular yel valor estimado del torque.
Como también se quiere graficar el valor del torque V.S el tiempo, entonces se debeusar un módulo de transmisión serial. En esta caso el µC PSoc5LP cuenta con un

54 Instrumentación e Interfaz por Software
transmisor-receptor de datos (UART)o en inglés Universal Asynchronous ReceiverTransmittes. El uso de este también se incluyó en el algoritmo de la figura 4.5.
Las líneas de codigo implementadas del anterior algoritmo se pueden encontrar enlos anexos.
4.1.4. Recepción y graficación de datos
Como se mencionó anteriormente, también se quiere graficar el valor del torque esti-mado, lo cual se va hacer en la pantalla de un computador. Pero para hacerlo se debecontar con una interfaz o comunicación entre los datos enviados desde el µC y elpuerto serial del computador. Para el desarrollo de este proyecto se implementarondos interfaces en disferentes programas. Una interfaz fue realizada en un archivo Mde Matlab del paquete Mathwork R2012a y la otra interfaz se hizo en el lenguajede programación visual gráfico LabVIEW versión 2012. Esto se hizo con el fin deobservar cual de los de los dos programas pudiese enviar los datos con más rapidezy sin menos interferencia (o ruido) al computador.
Como el lenguaje de programación de LAbVIEW es una lenguaje de programa-ción gráfica, entonces la realización de cualquier programa aplicación se debe hacerpor bloques. En la figura 4.6 de la siguiente página se puede ver el programa (porbloques) implementado para realizar la obtención y posterior graficación de los datosenviados por el µC.

4.1. PROCESAMIENTO DE LAS SEÑALES 55
Figura4.6:
Algoritmo(D
iagram
ade
bloq
uesen
LabV
IEW
para
recepc
iónygrafi
cación
deda
tosen
elcompu
tado
r.
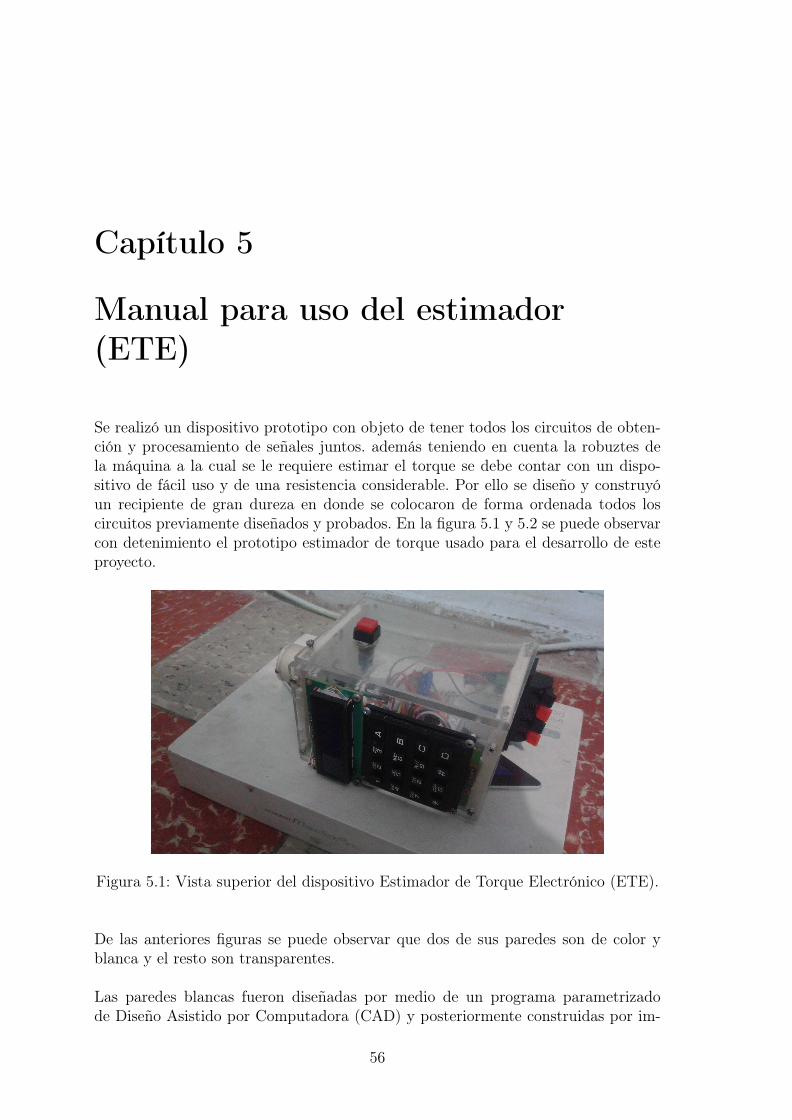
Capítulo 5
Manual para uso del estimador(ETE)
Se realizó un dispositivo prototipo con objeto de tener todos los circuitos de obten-ción y procesamiento de señales juntos. además teniendo en cuenta la robuztes dela máquina a la cual se le requiere estimar el torque se debe contar con un dispo-sitivo de fácil uso y de una resistencia considerable. Por ello se diseño y construyóun recipiente de gran dureza en donde se colocaron de forma ordenada todos loscircuitos previamente diseñados y probados. En la figura 5.1 y 5.2 se puede observarcon detenimiento el prototipo estimador de torque usado para el desarrollo de esteproyecto.
Figura 5.1: Vista superior del dispositivo Estimador de Torque Electrónico (ETE).
De las anteriores figuras se puede observar que dos de sus paredes son de color yblanca y el resto son transparentes.
Las paredes blancas fueron diseñadas por medio de un programa parametrizadode Diseño Asistido por Computadora (CAD) y posteriormente construidas por im-
56

57
Figura 5.2: Vista lateral del dispositivo Estimador de Torque Electrónico (ETE).
presoras en 3D (tecnología bastante útil en la construcción de piezas) estas piezasestán hechas de un material biodegrable llamadado PLA el cual es basntante duro,resistenta y además permite preservar el medio ambiente.
Las paredes transparente fueron realizadas de acrílico. Para ellas solo fue necesa-rio conocer las medidas necesarias para que encajaran con las paredes blancas ycortarlas. Ya listas todas la paredes solo se necesitó acomodar los circuitos y el mi-crocontrolador adentro del recipiente construido a partir de las paredes diseñadas.
En las figuras 5.1 y 5.2 se puede ver claramentes que cuentan con un teclado ma-tricial 4x4, una pantalla LCD, un botón de color rojo y unos bornes de color rojo ynegro.
El teclado matricial es para ingresar los valores de los parámetros del circuito equi-valente del motor, guardarlo y si se desea borrarlo.
La pantalla LCD tiene dos funciones: Una Llevar a cabo una comunicación entreel dispositivo y su usuario. Da un mensaje de bienvenida, guía al usuario a los pa-sos a relizar para un correcto funcionamiento del dispositivo. La otra función de lapantalla LCD es desplegar el valor de las variables torque, velocidad y potencia deentrada al motor de inducción.
El botón de color rojo tiene la función de que únicamente oprimido dicho botónse puede desplegar el valor de las variables torque, velocidad y potencia de entrada.Este botón funciona únicamente después de ingresados los parámetros de la máquina.
Dos de los bornes, uno color rojo y otro de color negro son para conectar los ter-minales entre neutro y algunas de las líneas del motor y así medir el voltaje entre

58 CAPÍTULO 5. MANUAL PARA USO DEL ESTIMADOR (ETE)
estos dos terminales. Los otros dos terminales restantes son para conectar una líneaen serie con el motor para medir la corriente de es línea.
De la figura también se puede ver que tiene una protuberancia o concavidad enla tapa blanca que está al lado del teclado y la pantalla. Esta concavidad contieneun sensor de detección de obstáculos infrarrojo y tiene de la función de medir lavelocidad angular del motor y con ello la estimación del torque como función deldeslizamiento del motor de inducción.
5.1. Primer uso del dispositivoPara usar adecuadamente el ETE se deben realizar los siguientes pasos:
1. Conectar el cable USB en el orificio que se encuentra junto a los bornes de colorrojo y negro. El cable debe ser de tipo macho-hembra y un extremo (hembra) debeser conectado al ETE y el otro extremo (macho) al computador tal como se observaenla figura 5.3.
Figura 5.3: Conexión USB entre el ETE y el computador.
2.Una vez conectado el dispositivo, este desplegará en la pantalla LCD un men-saje de bienvenidad y una guía continuada de pasos para ingresar los parámetrosdel motor. En la figura 5.4 se puede ver uno de los mensajes desplegados por la LCD.
3. Ingresados los parámetros del motor, se deben conectar dos de los cuatro hilosde la conexión estrella del motor de inducción. Uno de los hilos debe ser el neutroy el otro hilo alguna de la líneas del suministro de potencia eléctrica. Los otros dosbornes son para conectar alguna de las líneas en serie con el motor para medir lacorriente de línea.
4. Una vez ingresados los parámetros del motor y conectadas las líneas de ma-nera correcta se puede proceder a realizar la medición de la potencia de entrada, la

5.2. GRAFICACIÓN DE DATOS EN LABVIEW 59
Figura 5.4: Menú que despliega la pantalla LCD del dispositivo Estimador de torque(ETE).
velocidad angular y la estimación del torque. Como la estimación del torque es unafunción de la velocidad angular (o del deslizamiento) entonces esta se debe hacer demanera correcta. Para medir la velocidad angular se debe introducir la parte sobresaliente del ETE (donde se encuentra el sensor infrarrojo) en la parte hueca de laplaca concava metálica de seguridad que cubre la unión entre el eje de la carga y elmotor como se indica en la figura 5.5.
Figura 5.5: Manera de medir la velocidad angular del motor de Inducción.
5.2. Graficación de datos en LabVIEWDespués de conectado y configurado el ETE se puede proceder a graficar el valor deltorque en tiempo real a través de la plataforma de LabVIEW previamente creadapara la recepción y graficación de datos. En la figura 5.6 se muestra la plataforma omenú de mando para ver el valor y graficar los datos.

60 CAPÍTULO 5. MANUAL PARA USO DEL ESTIMADOR (ETE)
Figura 5.6: Plataforma de LabVIEW para graficación del torque de la máquina.
Para usar la plataforma solo basta con tener conectado el ETE al PC (por mediodel cable USB).
Una vez conectadoel dispositivo se debe escoger el puerto a usar (Com1 ó Com2..etc.).Este puerto se puede ver en la parte que dice VISA resource name.
Ya seleccionado el puerto a utilizar se puede comenzar con la graficación del torqueal oprimir el botón Run que se encuentra en la parte izquierda superior del platafor-ma (flecha de color blanco). En la figura 5.7 se muestra un ejemplo de la graficaciónde un torque en particular de la máquina. En ella se puede ver que se muestra laparte transitoria y estable para un valor de torque en particular de la máquina.
Si se quuiere detener el proceso de graficación se oprime el botón Stop que tam-bién se puede observar en la figura 5.6.
Figura 5.7: Grafica de Torque V.S tiempo.

5.2. GRAFICACIÓN DE DATOS EN LABVIEW 61
5.2.1. Posible WARNING de LabVIEW por desconexión inade-cuada del dispositivo
Sin el plean ejecución de la aplicación de la plataforma, el usuario oprime el botónAbort executión (figura 5.6) y libera el dispositivo del puerto serial (lo extrae delpuerto serial), luego verá que después de volver a conectar el dispositivo (el ETE)se presentará un error en pantalla como el que se muestra en le figura 5.8.
Figura 5.8: Posible mensaje de error por desconexión incorrecta del ETE.
El mensaje de la anterior figura quiere decir que hay problemas con el reconocimientodel puerto serial del computador. Para resolver este problema el usuario debe realizarlos siguiente pasos:1. Le da en la opción continuar de la ventana emergente que se observa en la figura 1.
2. Posteriormente retira el dispositivo.
3. Ejecuta de nuevo la aplicación con el fin de que al no estar conectado el dis-positivo actualizar o resetea el reconocimiento de los puertos. Por lo cual apareceráde nuevo la ventana de la figura 1. Y entonces debe oprimir de nuevo continuar.
4. Posteriormente en el botón VISA resource name da en la opción resfrecar y veráque después de oprimido dicho botón y volver a escoger los puertos, ya no apareceráde nuevo el comx (x=1,2,3. . . ) con el cual se reconoció al dispositivo.
5. Vuelve de nuevo a conectar su dispositivo.
6. Y en el botón VISA resource name da en la opción refrescar y verá que de nuevoaparece el comx(x=1,2,3. . . ) con el cual se reconoció al dispositivo antes de oprimirel botón Abort execution.
7. Se selecciona de nuevo dicho comx(x=1,2,3. . . ) .

62 CAPÍTULO 5. MANUAL PARA USO DEL ESTIMADOR (ETE)
8. Ejecuta la aplicación y verá que está de nuevo en correcto funcionamiento.
Una solución alternativa al anterior problema es cerrar y abrir de nuevo la aplicación.
Si por alguna razón de manera inapropiada o equivocada se suelta el dispositivoen plena ejecución de la aplicación, está se detendrá de forma súbita por lo cual nobastará con oprimir el botón de Stop sino que para detenerla por completo se debeaccionar el botón Abort execution. Después de volverlo a conectar el dispositivo sepresentará el mismo problema de transferencia de datos y el usuario observará lamisma ventana emergente. Por lo cual la solución es la misma que en el caso anterior.

Conclusiones
Para obtener un modelo confiable y más preciso del circuito equivalente del motores necesario que todas las pruebas sugeridas tanto por las bibliografías o el estandarIEEE112 se realizen emulando el funcionamiento del motor a plena carga.
La curva Par-velocidad del motor obtenida por medio del modelo de circuito equi-valente de Thevenin que más se acercó a los datos obtenidos de medida directa deltorque del motor de inducción, fue la que se realizó con el modelo de circuito equi-valente de Thevenin en el que se tuvo en cuenta la resistencia del núcleo com partedel circuito y no como un elemento de pérdidas de potencia constantes.
Aunque el modelo del circuito equivalente de Thevenin con la resistencia del nú-cleo es más aproximado a la medida directa del torque del motor de inducción, lasecuaciones resultantes de este modelo son más amplias y tediosas que el modelo decircuito equivalente que no cuenta con la resistencia del núcleo.
Se observó que con el modelo de circuito equivalente de Thevenin (para la esti-mación del torque) se obtiene una curva práctimente lineal en la region de trabajonominal de la máquina, es decir la región comprendida entre plena carga y funcio-namiento en vacío de la curca Par-velocidad del motor.
Se puede obtener una buena estimación del torque al considerar las pérdidas ro-tacionales como constantes.
El procesamiento de los datos a través de un software de lenguaje de programa-ción gráfica es bastante rápido como para poder observar los datos medidos casi queen tiempo real.
63

Trabajos futuros
Una posible aplicación del estimador de torque podría ser para realizar el controldel torque de una máquina de inducción y por ende adecuar la curva par-velocidadsegún las necesidades del usuario del motor Jaula de ardilla.
El estimador de torque es una herramienta útil para diagnosticar la capacidad deuna máquina y así poder clasificarla según su rango de trabajo.
El estimador de torque se puede usar para clasificar las máquinas de inducciónsegún las normas estandar, como por ejemplo el RETIQ el cual incluye métodos deensayo para determinar la eficiencia de los motores de inducción de corriente alterna.
64

Anexos
Los códigos de los programas realizados en matlab se pueden encontrar en el siguien-te link:
https://www.dropbox.com/scl/fi/t10e9nlykjx1xgwr71ebq/C
En el se encontrarán los códigos para realizar los siguientes cálculos:
Código de Matlab para obtención de Párametros del circuito.
Código para obtención de pérdidas por fricción y rozamiento junto conla regresión lineal.
Código para obtención de curva par-Velocidad.
Código para cálculo de resistenciás para el divisor de voltaje y subidorde nivel DC.
Las líneas de código implementadas en el microcontrolador se podrá encontrar enun CD adjunto al documento. En él se encuentran el código desarrollado en un soloarchivo para calcular:
Factor de potencia, valor TrueRms del voltaje y la corriente.
Velocidad angular y Estimación del torque del motor.
Además en las siguientes páginas se pueden encontrar los datasheet del sensor decorriente utilizado y del microcontrolador PSoC.
65

Bibliografía
[1] LABVOLT SYSTEMS, EMS 8503-00,“Sistema Didáctico de Electromecánicade Alta Potencia Serie 8013”,2000, Obtenido en 5 de Noviembre del 2015. Dis-ponible en : https://www.labvolt.com/.
[2] Anshuman,P;Hong Wong.;Vikram,K.;Sang,H.“Matlab Data Acquisition andControl Toolbox for Basic Stamp Microcontrollers”,Proceedings of the 45thIEEE Conference on Decision & Control,December 13-15, 2006.
[3] Zhou,Q.; Gao,Y.“ Technique of Data Acquisition for Linear Induction MotorBased on LabVIEW”,2012 International Symposium on Instrumetation & Mea-surement, Sensor Network and Automatization (IMSNA).
[4] MINISTERIO DE MINAS Y ENERGÍA, “Retiq(REGLAMENTO TÉCNICODE ETIQUETADO)”, Enero 2015, capitulo III, articulo 12.
[5] Carlos,M.;José,L. “Normas de Eficiencia Energética de Motores de Inducción,Está preparada Latinoamérica?”, Artículo de Revisión, Fecha de Aceptación, 25de Junio de 2013.
[6] Cypress, Perform, “PSoC 5LP: CY8C58LP Family Datas-heet”, Obtenido el 7 de Noviembre de 2015, Disponible en:http://www.cypress.com/file/45906/download
[7] Microchip,“PIC18F2420/2520/4420/4520 Data Sheet”, Ob-tenido el 7 de Noviembre de 2015, Disponible en:http://ww1.microchip.com/downloads/en/devicedoc/39631a.pdf
[8] Freescale Semiconductor, Inc., Microchip,“FRDM-K64F Freedom ModuleUser’s Guide”, Obtenido el 7 de Noviembre de 2015, Disponible en:http://cache.freescale.com/files/32bit/doc/user_guide/FRDMK64FUG.pdf
[9] Atmel, “Arduino Due, Atmel | SMART ARM-based MCU, DA-TASHEET”, Obtenido el 7 de Noviembre de 2015, Disponible en:http://www.atmel.com/images/atmel-11057-32-bit-cortex-m3-microcontroller-sam3x-sam3a_datasheet.pdf
[10] Eric,l.,“Ingeniería en Microcontroladores, Protocolo USB (UNIVERSAL SE-RIAL BUS)”, Obtenido 11 de Noviembre de 2015, Diponible en: http://www.i-micro.com/pdf/articulos/usb.pdf
66

BIBLIOGRAFÍA 67
[11] Carlos, M., “El puerto Serie RS232”, Obteni-do el 11 de Noviembre de 2015, Disponible en:http://galia.fc.uaslp.mx/cantocar/microcontroladores/SLIDES_8051 _PD-F/EL_RS232.PDF
[12] Jean,M.;Steve,B,“Aplication Note AN10216, I2C Manual”,Obtenido el 11 de Noviembre de 2015,Disponible en:http://www.nxp.com/documents/application_note/AN10216.pdf
[13] Ventim N., PhD, “A contactless torque sensor based on the magnetostrictionproperty of amorphous iron”, Centro de Electrotecnia Teorica e Medidas Elec-tricas Instituto Superior Tecnico, 1096 Lisboa Codex Portugal, 0-7803-3019-6/96/S3.000 19
[14] G.B. Kliman, R.A. Koegl; W.J. Premerlani; T.B. Breen, “A demonstration of asensorless torque meter for ac motors”, 0-7803-3544-919 $ 65 .00 0 1996 IEEE.
[15] Wilton, L.; Antonio, M.; Amauri, O., “A Method for Measuring Torqueof Squirrel-Cage Induction Motors Without Any Mechanical Sensor”, EEETRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL.64, NO. 5, MAY 2015.
[16] Fabiano,V.;Luis,B.;Joao,O; Bimal,k.; Germano,L; “ A DSP Based Torque Meterfor Induction Motors”, Industrial Electronics Society, 2003. IECON ’03. The29th Annual Conference of the IEEE.
[17] Zhang,D;Gong,J.,“ An Energy-saving Automatic System for the Measurementof the Characteristics of Asynchronous Machine”, Power Electronic Drives andEnergy Systems for Industrial Growth, 1998. Proceedings. 1998 InternationalConference on.
[18] Enslin,V.,“ A method of using microwaves for measuring small displacements,and a torque-meter using tffls principle”, Proceedings of the IEE - Part II: PowerEngineering, 22 Enero de 2010.
[19] Pedra,J.; Sainz, L., “ Parameter estimation of squirrel-cage induction motorswithout torque measurements ”Electric Power Applications, IEE Proceedings,20 de Marzo de 2006.
[20] "Motor".Diccionario de la lengua española. Madrid, España: Real Aca-demia Española, Obtenido el 16 de octubre de 2015. Disponibleen:http://lema.rae.es/drae/srv/search?id=jSQ2O9aABDXX2qNTOjsS.
[21] Stheben, C., ”Maquinas Eléctricas: Motores de Inducción”, tercera edición, McGraw Hill, 2000,768 pág.
[22] Figura de motor de inducción de jaula de ardilla, Rey pastor, Obtenido el 12de octubre de 2015. Disponible en :http://www.reypastor.org.
[23] Bhag, G., “Maquinas Eléctricas y Transformadores: Motores Polifásicos y deInducción”, tercera edición, Oxford university Press, 2003, 313 pág.

68 BIBLIOGRAFÍA
[24] Theodore, W., “Maquinas Eléctricas y Sistemas De Potencia”, sexta Edición,Pearson Prentice Hall, Mexico 2007,31 pág.
[25] A. Fitzgerald ; Charles, K.; Stephen, D.,“Electric Machinery”, Sixth Edition,Mc Graw Hill, 2003, 688 pages.
[26] Ministerio de Minas y Energía, “Retiq (RReglamento Técnico de Etiquetado)”,Enero 2015, capitulo III, articulo 12.
[27] IEEE Power Engineering Society “ IEEE Standard Test Procedure for Poliphaseinduction Motors and generators ” Pag 33-34.
[28] Versión Matlab del paquete Mathwork R2012a.
[29] Versión LabVIEW de National Instruments versión 2014.
[30] Equipo didáctico de máquinas eléctricas DELORENZO.


















