Equipo. no. 3
24
Equipo Nº 3: Alejandra Covarrubias Morales. 11130405 Héctor Omar Bonilla Villa. 11130140 José Brian Lira Fernández. 11130402 Materia: Ecuaciones Diferenciales. 5º Semestre. Carrera: Ingeniería Mecatrónica. Maestra: M.C. J. Agustín Flores Ávila. Trabajo Final. INSTITUTO TECNOLÓGICO DE LA 1
Transcript of Equipo. no. 3

Equipo Nº 3: Alejandra Covarrubias Morales. 11130405
Héctor Omar Bonilla Villa. 11130140José Brian Lira Fernández. 11130402
Materia: Ecuaciones Diferenciales.
5º Semestre.
Carrera: Ingeniería Mecatrónica.
Maestra: M.C. J. Agustín Flores Ávila.
Trabajo Final.
INSTITUTO TECNOLÓGICO DE LA LAGUNA.
1
Torreón, Coahuila.Lunes, 3 Junio de 2013.
INDICE.Contenido: Pág.
1.-Prólogo. 32.-Introducción: ¿Cómo funciona el sistema de suspensión de un automóvil?
4
Componentes de la suspensión. 53.-Planteamiento del problema. 64.-Justificación. 75.-Enunciado del problema. 76.-Marco Teórico. 86.1.-Física. 86.1.1.-Segunda Ley de Newton. 86.1.2.- Principio de D'Alembert. 86.1.3.-Ley de Hooke. 96.1.4.-Ley de los amortiguadores. 96.2.-Matemática. 106.2.1.-Definición de Ecuaciones diferenciales. 106.2.2.-Clasificación de las ecuaciones diferenciales. 106.2.3.-Usos. 116.2.4.-Transformada de Laplace. 116.2.5.-Función escalón unitario. 126.2.6.-Función periódica. 126.2.7.-Función gamma. 126.2.8.-Convolución. 127.-Resolución del problema. 12Resolución del problema. 13Resolución del problema. 14Resolución del problema. 15Resolución del problema. 16Resolución del problema. 17Resolución del problema. 18Resolución del problema. 19
2

1.- Prólogo.El presente trabajo es el producto de una ardua e interesante investigación y desde luego del gran desarrollo de las matemáticas en la ingeniería.
Dicho trabajo está integrado fundamentalmente en 3 partes:
1.º. La investigación sobre el planteamiento de un problema real en la ingeniería, para reconocer y comprender las necesidades básicas de la sociedad y así poder establecer los diferentes criterios de solución de dichos problemas.
2.º. La investigación y la comprensión de las bases teóricas Físicas y Matemáticas, que serán fundamentales para la resolución de un problema.
3.º. La resolución matemática de un problema, aplicando los métodos matemáticos vistos en el curso, además de la interpretación de dichos resultados.
Nosotros comprobaremos que los problemas reales pueden ser modelados o representados mediante un sistema masa resorte amortiguador y pueden ser resueltos con la ayuda de las ecuaciones diferenciales y de la Transformad de Laplace.
Como se verá más adelante nos daremos cuenta de que se trata de una señal de diente de sierra en el cual se nos proporcionan valores para el resorte, la masa y el amortiguador.
3

2.- Introducción:¿Cómo funciona un sistema de suspensión del automóvil?
Cuando se habla de suspensión, nos estamos refiriendo a un sistema en el cual, un objeto se mantiene suspendido en el aire apoyado o suspendido sobre una unión elástica con otro objeto que sirve de apoyo sobre el suelo.
Todos sabemos que un cuerpo suspendido adquiere movimiento si sobre él se realiza una fuerza, habremos podido darnos cuenta que la velocidad que adquiere el cuerpo en un tiempo determinado dependerá de la masa (peso) del cuerpo, así tenemos que nos cuesta mucho esfuerzo poner en movimiento un cuerpo pesado como un automóvil, empujándolo, mientras que con muy poco esfuerzo podemos poner en movimiento empujando una bicicleta. Este fenómeno de oponer resistencia al movimiento de acuerdo a la masa se conoce como inercia.
El esquema siguiente muestra un cuerpo pesado que representa el peso del automóvil suspendido por un elemento elástico (resorte) que se apoya sobre otro cuerpo más ligero que representa los neumáticos.
Si ahora aplicamos una fuerza vertical de corta duración al apoyo para levantarlo, tal y como sucede cuando un cuerpo en movimiento encuentra una protuberancia del camino, el apoyo, de poca inercia reacciona con facilidad y se mueve en dirección vertical copiando el perfil de la protuberancia. Pero no pasa lo mismo con el cuerpo pesado, este último
4

ofrece una mayor resistencia al movimiento debido a su elevada inercia, por lo que la subida del apoyo se produce principalmente a expensas de la contracción del resorte, reduciendo notablemente el efecto de subida del cuerpo pesado, no obstante el cuerpo pesado siempre se moverá alguna cantidad.
Componentes de la suspensión.Un sistema de suspensión moderno de un vehículo de carretera tiene los componentes siguientes:
1.El neumático 2.El mecanismo de soporte3.El amortiguador4.La barra estabilizadora 5.Los soportes elásticos de la carrocería 6.El asiento de los pasajeros
El neumático.El sistema de suspensión en el automóvil comienza en el contacto del neumático con el camino. La propia elasticidad del caucho relleno de aire proporciona un enlace muy elástico capaz de moverse por un camino sin apenas transmitir las oscilaciones de pequeña magnitud al resto del vehículo. La presión de inflado repercute mucho en la capacidad del neumático de evitar la transmisión de ondulaciones al vehículo. Una presión excesiva endurece el neumático y esta rigidez dificulta la absorción y se empeora la suspensión.
El mecanismo de soporte.Siempre, el elemento que soporta las ruedas se conecta a la carrocería a través de un mecanismo muy elástico que permite el movimiento relativo de las ruedas y la carrocería, tal y como se representa esquemáticamente en el sistema de suspensión elemental tratado arriba como un resorte.
Muelles.Resorte de acero espiral.Muelle de hojas superpuestas.Bolsas de aire.Barra de torsión.
Amortiguador.El amortiguador es un dispositivo colocado entre el cuerpo suspendido y el apoyo, en paralelo con el resorte, que produce una cierta resistencia al movimiento mutuo. Esta resistencia ha sido calculada y probada para influir poco en el fenómeno de movimiento mutuo cuando se produce la
5

perturbación, pero que amortigua rápidamente la posibilidad de la oscilación natural del sistema elástico después.
Barra estabilizadora.Este elemento es esencialmente una barra de acero elástica en forma de U alargada conectada en un extremo, al mecanismo de suspensión de un lado del vehículo, y en el otro extremo al otro lado del mecanismo de suspensión de la otra rueda, representada de color naranja en la figura de abajo.
Esta barra torciéndose, transfiere parte de la carga adicional aplicada a la suspensión del un lado, a la suspensión del otro lado, cuando el vehículo hace un giro, reduciendo notablemente la inclinación de la carrocería. [1]
3.-Planteamiento del problema.Sistema de suspensión del automóvil.
Equipo (Función).Sistema de Suspensión Rígida usada por Volkswagen:
Su función es la de suspender y absorber los movimientos bruscos que se producirían en la carrocería, por efecto de las irregularidades que presenta el camino, proporcionando una marcha suave, estable y segura.
Para lograr dicha finalidad estos componentes deben ir entre el bastidor (carrocería) y los ejes donde van las ruedas. [2]
Otras funciones.*Reducción de fuerzas causadas por irregularidades del terreno.*Control de la dirección del vehículo.*Mantenimiento de la adherencia de los neumáticos a la carretera.*Mantenimiento de una correcta alineación de las ruedas.*Soporte de la carga del vehículo.*Mantenimiento de la altura óptima del automóvil. [3]
Empresa.Volkswagen.En alemán ‘automóvil del pueblo’, es un fabricante de automóviles con sede en Wolfsburgo, Alemania. Forma parte del Grupo Volkswagen, el mayor fabricante de automóviles de Europa. Se fundó el 28 de mayo de 1937 por el alemán Ferdinand Porsche. [4]
Modelo: Jetta 2013.
Desperfecto.6

Quisiera comentar que mi auto Jetta 2013 ha sufrido 2 colisiones debido a que he tenido que frenar de emergencia y en ambos caso el auto se amarro. – Anónimo. [5]
El nuevo Jetta tiene una vibración en punto muerto. – Anónimo. [6]
Cuando paso por un bache, se golpea muy fuerte como si no trajera llanta y se siente el golpe, como si trajera solamente el rin. –Anónimo. [7]
Periódico Excélsior: 7 de abril.- La mañana de este domingo dos personas perdieron la vida después de verse involucradas en accidentes automovilísticos registrados en distintos puntos de la Ciudad de México. [8]
Le fallaron los frenos a un Jetta. [9]
4.- Justificación.Desgaste de piezas.Holguras en articulaciones,Fugas de líquido en los amortiguadores.Se tiene que estar checando continuamente para ver si no hay problemas con el sistema de suspensión.
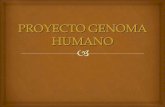
5.- Enunciado del problema.Se tiene un sistema masa-resorte-amortiguador con los valores: M=4, D=4 y K=1
A este sistema se le aplica fuerza como la mostrada en la figura. Considerando que x (0)=0 y x´(0)=1, determine:
7

M=4, D=4, K=1
a) Desplazamiento máximo en amplitud y en tiempo.b) El tiempo para llegar a cero, considerando a 0 como el 5% de amplitud máxima.c) Clasifique el sistema:d) La posición de la masa en los instantes en que t=1/4, 1/3, ½ del tiempo
que tarda para llegar a cero.
6.- Marco Teórico.6.1.- Física.
6.1.1.-Segunda Ley de Newton.La Segunda Ley de Newton establece lo siguiente:
Esta ley explica qué ocurre si sobre un cuerpo en movimiento (cuya masa no tiene por qué ser constante) actúa una fuerza neta: la fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección. En concreto, los cambios experimentados en el momento lineal de un cuerpo son proporcionales a la fuerza motriz y se desarrollan en la dirección de esta; las fuerzas son causas que producen aceleraciones en los cuerpos.
0
0.2
0.4
0.6
0.8
1
1.2
Fuerza
Tiempo
G (t
)
“La aceleración de un objeto es directamente proporcional a la fuerza neta que actúa sobre él e inversamente proporcional a su masa”.
8

Consecuentemente, hay relación entre la causa y el efecto, la fuerza y la aceleración están relacionadas. Dicho sintéticamente, la fuerza se define simplemente en función del momento en que se aplica a un objeto, con lo que dos fuerzas serán iguales si causan la misma tasa de cambio en el momento del objeto. [10][11]
∑ F⃗=m a⃗
6.1.2.-Principio de D'Alembert.El principio de D'Alembert es realmente una generalización de la segunda ley de Newton en una forma aplicable a sistemas con ligaduras, ya que incorpora el hecho de que las fuerzas de ligadura no realizan trabajo en un movimiento compatible.
Debe señalarse que el principio de D'Alembert es peculiarmente útil en la mecánica de sólidos donde puede usarse para plantear las ecuaciones de movimiento y cálculo de reacciones usando un campo de desplazamientos virtuales que sea diferenciable. En ese caso el cálculo mediante el principio de D'Alembert, que también se llama en ese contexto principio de los trabajos virtuales es ventajoso sobre el enfoque más simple de la mecánica newtoniana.
El principio de D'Alembert establece que para todas las fuerzas externas a un sistema:
∑i
( ˙p i- Fi )∙δ ri =0
Donde la suma se extiende sobre todas las partículas del sistema, siendo:
pi, momentum de la partícula i-ésima.F i, fuerza externa sobre la partícula i-ésima.δ ri, Cualquier campo vectorial de desplazamientos virtuales sobre el conjunto de partículas que sea compatible con los enlaces y restricciones de movimiento existentes. [12]
6.1.3.-Ley de Hooke.En física, la ley de elasticidad de Hooke o ley de Hooke, originalmente formulada para casos del estiramiento longitudinal, establece que el alargamiento unitario que experimenta un material elástico es directamente proporcional a la fuerza aplicada F:
9
ϵ =δL
=FAE
Donde δ es el alargamiento, L es la longitud original, E es el módulo de Young, A la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
La forma más común de representar matemáticamente la Ley de Hooke es mediante la ecuación del muelle o resorte, donde se relaciona la fuerza F ejercida en el resorte con la elongación o alargamientoδ producido:
F=-k δ
Donde k es la constante elástica del resorte y δ es su elongación o variación que experimenta su longitud. [13][14]
6.1.4.-Ley de los amortiguares.En el mundo real esto no es posible. En todo proceso físico hay pérdidas por el motivo que sea, no existe el movimiento continuo (a excepción de las ideas de Einstein al respecto), y en este caso se producen por el amortiguamiento de este movimiento vibratorio armónico simple:
El amortiguamiento se comporta como una fuerza proporcional a la velocidad, como lo son las fuerzas de rozamiento con fluidos (aire, agua...) y por ello la fórmula es la misma. c es un coeficiente de rozamiento viscoso.
F=c*v = c*x'
(Cuando el cono está parado no se mueve, por lo que o no hay fuerza o está compensada), la ecuación se hace:
Md2 xd t2
=Fs+Fdd2 xd t2
+cM
dxdt
+KM
x=0
Se pueden presentar tres posibles casos:Movimiento sobreamortiguado, movimiento críticamente amortiguado y
movimiento subamortiguado. [15]
6.2.- Matemática:Ecuaciones Diferenciales:
6.2.1.-Definición:Una ecuación diferencial es aquella ecuación que contiene derivadas o diferenciales; de una o más variables dependientes, respecto a una o más variables independientes. [16]
10

6.2.2.-Clasificación:a) Tipo: Ecuaciones diferenciales ordinarias: aquellas que contienen derivadas
respecto a una sola variable independiente.
Ecuaciones en derivadas parciales: aquellas que contienen derivadas respecto a dos o más variables.
b) Según el orden:El orden de la derivada más alta en una ecuación diferencial se denomina orden de la ecuación.
c) Según el grado.Es la potencia de la derivada de mayor orden que aparece en la ecuación, siempre y cuando la ecuación esté en forma polinómica, de no ser así se considera que no tiene grado.
d) Linealidad.Se dice que una ecuación es lineal si tiene la forma:an (x )y (n) +an-1 (x )y (n-1)+…+a1 (x )y ´+a0 (x )y=g(x), es decir:
*Ni la función ni sus derivadas están elevadas a ninguna potencia distinta de uno o cero.*En cada coeficiente que aparece multiplicándolas sólo interviene la variable independiente.*Una combinación lineal de sus soluciones es también solución de la ecuación. [17]
6.2.3.-Usos:Para el modelado de problemas matemáticos, físicos, químicos, eléctricos, etc..
Leyes de movimiento de Newton, en circuitos eléctricos (Ley de Kirchoff), mezclas químicas, flujo de calor, crecimiento y decaimiento, en cohetes, en geometría, deflexión de vigas, crecimiento biológico, oferta y demanda, entre muchos otros. [18]
6.2.4.-La Transformada de Laplace.
11

La Transformada de Laplace es una técnica Matemática que forma parte de ciertas transformadas integrales como la transformada de Fourier, la transformada de Hilbert, y la transformada de Mellin entre otras. Estas transformadas están definidas por medio de una integral impropia y cambian una función en una variable de entrada en otra función en otra variable. La transformada de Laplace puede ser usada para resolver Ecuaciones Diferenciales Lineales y Ecuaciones Integrales. Aunque se pueden resolver algún tipo de ED con coeficientes variables, en general se aplica a problemas con coeficientes constantes. Un requisito adicional es el conocimiento de las condiciones iniciales a la misma ED. Su mayor ventaja sale a relucir cuando la función en la variable independiente que aparece en la ED es una función seccionada.
Cuando se resuelven ED usando la técnica de la transformada, se cambia una ecuación diferencial en un problema algebraico. La metodología consiste en aplicar la transformada a la ED y posteriormente usar las propiedades de la transformada. El problema de ahora consiste en encontrar una función en la variable independiente tenga una cierta expresión como transformada.
La transformada de Laplace de una función f(t) definida (en ecuaciones diferenciales, o en análisis matemático o en análisis funcional) para todos los números positivos t ≥ 0, es la función F(s), definida por:
F (s )=L {f(t) }=∫0
∞
e-st f ( t )dt
Siempre y cuando la integral esté definida. Cuando f(t) no es una función, sino una distribución con una singularidad en 0, la definición es:
F (s )=L {f(t) }=limϵ→0∫-ϵ
∞
e-st f (t )dt
Cuando se habla de la transformada de Laplace, generalmente se refiere a la versión unilateral. También existe la transformada de Laplace bilateral, que se define como sigue:
FB (s)=L {f(t)}=∫-∞
∞
e-st f ( t )dtLa transformada de Laplace F(s) típicamente existe para todos los números reales s > a, donde a es una constante que depende del comportamiento de crecimiento de f(t).
es llamado el operador de la transformada de Laplace. [19]
12

[20]
7.-Resolución del problema.13
1 0 1 2
1
0.5
0.5
1
1
g t( )
1 2
t
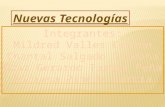
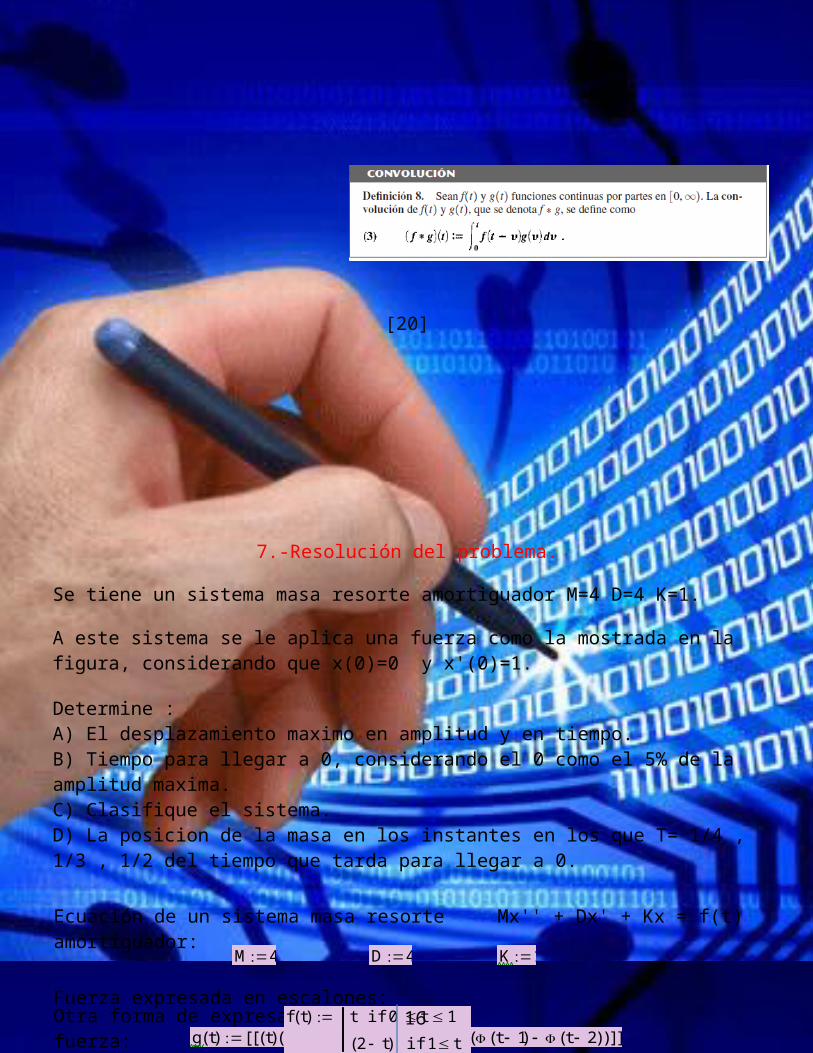
Se tiene un sistema masa resorte amortiguador M=4 D=4 K=1.
A este sistema se le aplica una fuerza como la mostrada en la figura, considerando que x(0)=0 y x'(0)=1. Determine :A) El desplazamiento maximo en amplitud y en tiempo.B) Tiempo para llegar a 0, considerando el 0 como el 5% de la amplitud maxima.C) Clasifique el sistema. D) La posicion de la masa en los instantes en los que T= 1/4 , 1/3 , 1/2 del tiempo que tarda para llegar a 0.
Ecuación de un sistema masa resorte amortiguador:Mx'' + Dx' + Kx = f(t)
M 4 D 4 K 1
Fuerza expresada en escalones:
g t( ) t( ) t( ) t 1( )( )[ ] 2 t( ) t 1( ) t 2( )( )[ ][ ]
Otra forma de expresar la fuerza:
f t( ) t 0 t 1if
2 t( ) 1 tif
14

1 0 1 2
1
0.5
0.5
1
1
f t( )
1 2
t
Sustituimos M, D, K y f(x) en la ecuación del sistema masa resorte amortiguador:
Mx'' + Dx' + Kx = f(t)
f t( ) t( ) t( ) t 1( )( )[ ] 2 t( ) t 1( ) t 2( )( )[ ][ ]
4x''+4x'+x=[(t)(Φ(t)-Φ(t-1))+(2-t)(Φ(t-1)-Φ(t-2))]
Aplicando la Transformada de Laplace:
L{4x''+4x'+x=[(t)(Φ(t)-Φ(t-1))+(2-t)(Φ(t-1)-Φ(t-2))]} Aplicando las siguientes fórmulas de Laplace:
L x´´( ) s2x s( ) sx 0( ) x´ 0( )
L x´( ) sxs( ) x 0( )
L x( ) x s( )
Calculando la Transformada de Laplace de f(t):
F s( ) f t( ) laplacee s 1 2
s2
Otras formas de representar f(t): 15
e 2 s es 1 2
s2
e 2 s 2e s 1
s2
2e s s 1( )
s2
e s 2s 1( )
s2
1
s2
2e 2 s
s
2e s
s NOTA: Calculados en Wolfram Alpha.
Sustituyendo las Transformadas de Laplace:
4 s( 2x s( ) sx 0( ) - x´ 0( ))+
4 sx s( ) x 0( )( ) x s( )e s 1 2
s2
Sustituyendo las condiciones iniciales y desarrollando álgebra, despejamos para x(s):
x(0)=0 y x'(0)=1.
4 s( 2x s( ) -1)+
4 sx s( )( ) x s( )e s 1 2
s2
4s2x s( ) -4+
4sxs( ) x s( )e s 1 2
s2
x s( ) 4s2 4s 1 e s 1 2
s24
Ecuación sin la señal de entrada:
H s( )1
M sD2M
2 KM
D2
4M2
1
4 s12
2
Obtener h(t):
h t( ) H s( ) invlaplacet e
t
2
4
h t( )t e
t
2
4
16

0 5 10 15
1
0.5
h t( )
t
Utilizando la Transformada inversa de Laplace.
x s( ) 4s2 4s 1 e s 1 2
s24
x s( )e 2 s 2e s 1
s2 4s2 4s 1
4
4s2 4s 1
Calcular x(t).
x1s( )e 2 s
s2 4s2 4s 1
x1t( ) t 2( ) 4 e
t 2( )
2
t 2( ) e
t 2( )
2
4
t 2( )
x2 s( )2 e s
s2 4s2 4s 1
x2 t( ) t 1( ) 4 e
t 1( )
2
t 1( ) e
t 1( )
2
4
2( ) t 1( )
x3 t( )1
s 4 s2 4 s 1 invlaplace 1t e
t
2
2
e
1
2t
17

x t( )4
4s2 4s 1 invlaplace 4 t e
t
2
x4 t( ) 4 t e
t
2
t( )
Obtener x(t).
x t( ) x1t( ) x2 t( ) x3 t( ) x4 t( )
x t( ) t 2( ) t 4 e1
t
2
e1
t
2
t 2( ) 6
t 1( ) 2 t 8 e
1
2
t
2
2 e
1
2
t
2
t 1( ) 10
t e
t
2
2
e
1
2t
4 t t( ) e
t
2
1
x t( ) x t( ) t( )
x t( ) t( ) e
t
2
t 1( ) 2 t 8 e
1
2
t
2
2 e
1
2
t
2
t 1( ) 10
t e
t
2
2
t 2( ) t 4 e1
t
2
e1
t
2
t 2( ) 6
4 t t( ) e
t
2
1
x 0( ) 0
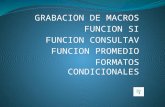
0 2 4 6
2
4
0.157
3.142
x t( )
2.003 5.52
t
a) dx t( )tx t( )d
d t1 3
tm rootdx t1( ) t1( ) 2.003 Desp x tm 3.142
b) Desp0 Desp0.05 0.157 t_cero 5.52
c)
D2M
0.5 1 Entonces el sistema es sub-amortiguado.
18

d)tiempo_medio
12
t_cero
x tiempo_medio( ) 2.896
tiempo_tercio13
t_cero
x tiempo_tercio( ) 3.128
tiempo_cuarto14
t_cero
x tiempo_cuarto( ) 2.917
velocidad y aceleración:
v t( )tx t( )d
d
v 0( ) 1
19

a t( )2tx t( )d
d
2
0 5 10
4
2a t( )
t
20