
ENAE0208 / 580 HORAS -...
113
MANTENIMIENTO INDUSTRIAL Módulo 6 Automatismos Autor: Método Estudios Consultores, S.L.U. Edita: Método Estudios Consultores, S.L.U. “Queda rigurosamente prohibida, sin la autorización escrita del editor, la reproducción parcial o total de esta obra por cualquier medio o procedimiento, comprendidos la reprografía y el tratamiento informático, y la distribución de ejemplares mediante alquiler o préstamo públicos”. © 2013 Método Estudios Consultores, S.L.U.
Transcript of ENAE0208 / 580 HORAS -...
MANTENIMIENTO INDUSTRIAL
Módulo 6 Automatismos
Autor: Método Estudios Consultores, S.L.U. Edita: Método Estudios Consultores, S.L.U. “Queda rigurosamente prohibida, sin la autorización escrita del editor, la reproducción parcial o total de esta obra por cualquier medio o procedimiento, comprendidos la reprografía y el tratamiento informático, y la distribución de ejemplares mediante alquiler o préstamo públicos”. © 2013 Método Estudios Consultores, S.L.U.

2
Módulo 6. Automatismos
índice 1. Lógica básica de automatismos......................................................................................................... 4
1.1. Automatismos ............................................................................................................................... 4 1.2. Variable binaria ..............................................................................................................................5
1.2.1. Sistemas de numeración ...................................................................................................... 6 1.3. Funciones lógicas básica ............................................................................................................. 9 1.4. Función lógica ............................................................................................................................. 15
1.4.1. Tabla de verdad de una función lógica ............................................................................ 16 1.5. Simplificación de funciones lógicas ......................................................................................... 18
2. Simbología y aparatos para automatismos ................................................................................... 21 2.1. Introducción ................................................................................................................................. 21 2.2. Simbología y normalización ...................................................................................................... 23
2.2.1. Símbolos ................................................................................................................................ 24 2.2.2. Identificación de aparatos ................................................................................................. 25 2.2.3. Marcado de bornes .............................................................................................................. 25
2.3. Esquemas de un automatismo eléctrico ................................................................................ 28 2.3.1. Esquema de mando ............................................................................................................. 31 2.3.2. Esquema de potencia ......................................................................................................... 32
2.4. Aparatos que forman un sistema automático ....................................................................... 33 2.4.1. Contactor .............................................................................................................................. 33 2.4.2. Relé ........................................................................................................................................ 38 2.4.3. Fusibles ................................................................................................................................. 43 2.4.4. Pilotos de señalización ...................................................................................................... 44 2.4.5. Pulsadores ............................................................................................................................ 45 2.4.6. Finales de carrera ............................................................................................................... 46 2.4.7. Interruptores de control de nivel ..................................................................................... 46 2.4.8. Termostatos ........................................................................................................................ 47 2.4.9. Presostatos .......................................................................................................................... 47 2.4.10. Detectores ......................................................................................................................... 48 2.4.11. Aparatos de funciones múltiples ................................................................................... 50 2.4.12. Seccionadores ................................................................................................................... 51 2.4.13. Interruptores ..................................................................................................................... 52
3. Métodos gráficos para el diseño de automatismos ..................................................................... 52 3.1. Introducción ................................................................................................................................. 52 3.2. Reglas de evolución ................................................................................................................... 55
4. Estructura del autómata programable .......................................................................................... 59 4.1. El autómata programable.......................................................................................................... 59 4.2. Evolución de sistemas cableados a sistemas programados ............................................... 59 4.3. Estructuras y características del autómata programable ................................................... 61
4.3.1. La unidad central de procesos (CPU) ............................................................................... 61 4.3.2. Memoria ................................................................................................................................ 62 4.3.3. Fuente de alimentación ..................................................................................................... 63 4.3.4. Entradas y salidas ............................................................................................................... 64 4.3.5. Aspectos externos del autómata ..................................................................................... 69

3
MANTENIMIENTO INDUSTRIAL
4.4. Equipos de programación y periféricos .................................................................................. 70 4.4.1. Visualizadores y paneles de operación ........................................................................... 70 4.4.2. Cartucho EEPROM ............................................................................................................... 72
4.5. Clasificación de los autómatas ................................................................................................. 72 4.5.1. Posibilidades de expansión de un autómata programable .......................................... 74
4.6. Jerarquía de la automatización industrial .............................................................................. 74 4.6.1. Buses de comunicación industrial .................................................................................... 76
4.6.1.1. PROFIBUS ...................................................................................................................... 76 4.6.1.2. Bus AS-i ......................................................................................................................... 77
5. Programación de autómatas ............................................................................................................ 81 5.1. Introducción ................................................................................................................................. 81 5.2. Lenguajes de programación ..................................................................................................... 82
5.2.1. Direccionamiento de variables ......................................................................................... 82 5.2.2. Lenguajes textuales ........................................................................................................... 84 5.2.3. Lenguajes gráficos .............................................................................................................. 86 5.2.4. Grafcet (SFC) ........................................................................................................................ 88
5.3. Tipos de programación .............................................................................................................. 89 5.4. Representación de esquemas .................................................................................................. 90 5.5. Representación de esquemas .................................................................................................. 92 5.6. Programación de operaciones .................................................................................................. 94
5.6.1. Operación de carga ............................................................................................................. 94 5.6.2. Operación de escritura ....................................................................................................... 95 5.6.3. Operaciones combinacionales .......................................................................................... 96 5.6.4. Operaciones de memoria (realimentación) .................................................................. 100 5.6.5. Operaciones con memorias internas (marcas) ............................................................ 103 5.6.6. Operaciones de tiempo ....................................................................................................104 5.6.7. Operaciones de cómputo. ................................................................................................ 106 5.6.8. Operaciones de control del programa ........................................................................... 109

4
Módulo 6. Automatismos
MÓDULO 6. AUTOMATISMOS 1. Lógica básica de automatismos 1.1. Automatismos Los dispositivos que permiten sustituir al operador humano en la realización de tareas de cálculo, trabajos rutinarios, y tomas de decisiones, reciben el nombre de automatismos. Dependiendo de la tecnología utilizada en su realización pueden ser:
Eléctricos. Están constituidos por elementos eléctricos (relés, contactos, pulsadores...). La gran mayoría de automatismos tienen parte eléctrica.
Electrónicos. Los dispositivos semiconductores (diodos, transistores...) son la base de estos automatismos. El avance en las técnicas de integración de estos componentes, permiten realizar funciones de gran potencia y complejidad con uno sólo.
Neumáticos. Están constituidos por elementos que utilizan la fuerza del aire comprimido para su funcionamiento (válvulas neumáticas, cilindros neumáticos...)
Hidráulicos. Sus elementos funcionan con la fuerza que le transmite un líquido sometido a presión.
Mecánicos. Están compuestos por mecanismos de transmisión y transformación de movimientos, como poleas, engranajes, levas, bielas, etc.
En la práctica los automatismos están constituidos por combinaciones de tecnologías anteriores. En general, los elementos o dispositivos que constituyen un automatismo son los siguientes:
Dispositivos de entrada. Tienen como función dar información al circuito de mando. Los interruptores, pulsadores, termostatos, y detectores de posición, son algunos de estos dispositivos, también llamados captadores.
Circuito de mando. Tienen como misión gobernar los dispositivos de potencia (relés, contactores, tiristores, transistores...); según ciertas condiciones establecidas y que responden a las acciones de los dispositivos de entrada. Los circuitos de mando se pueden realizar con diferentes tecnologías, dependiendo de la aplicación o proceso industrial que se vaya a controlar. -Dispositivos de potencia. Están constituidos por los dispositivos que controlan los circuitos de mando: bobinas de contactores, electroválvulas, tiristores, etc. Su función es abrir o cerrar el paso de energía a la máquina que controlan (motores eléctricos, dispositivos neumáticos, lámparas, etc.).
Dispositivos de señalización. Se utilizan para conocer el estado de funcionamiento de la parte señalizada, permitiendo la detección de posibles anomalías en el funcionamiento del automatismo. Los dispositivos de señalización que se emplean normalmente son: los diodos LED y las lámparas luminescentes.
5
MANTENIMIENTO INDUSTRIAL
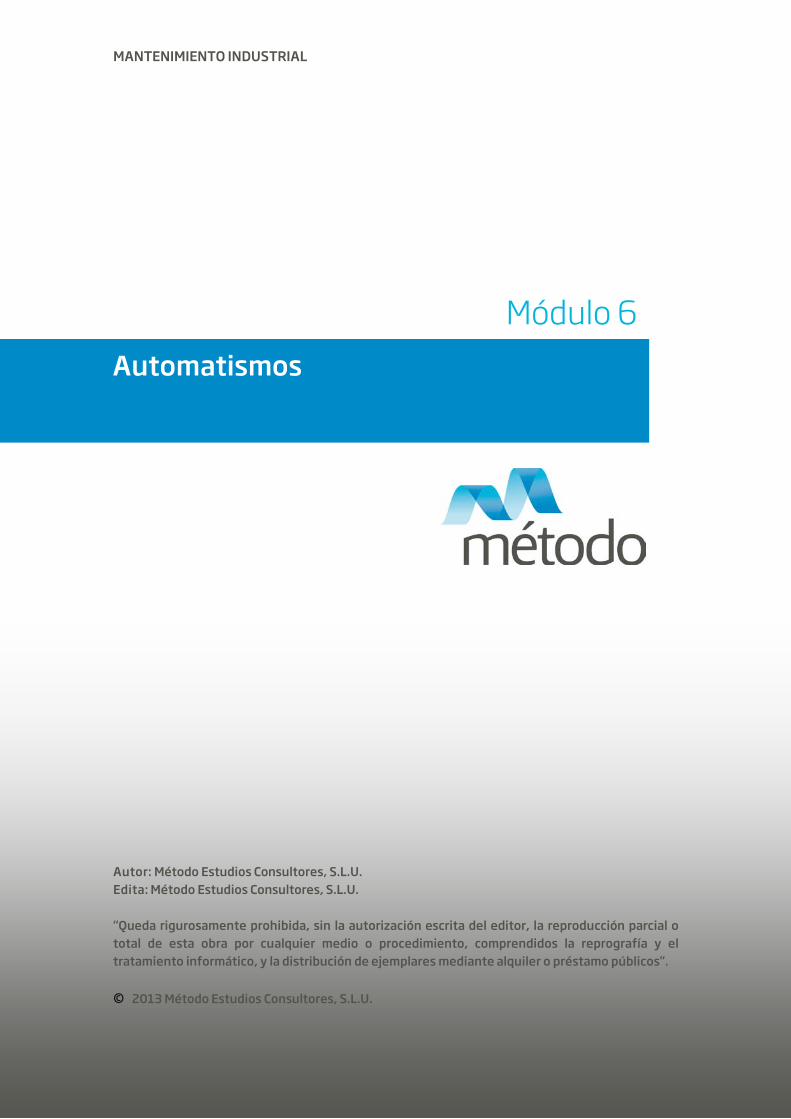
Alimentación. Su función es la de suministrar energía a los diferentes dispositivos y máquinas del automatismo.
Esquema de bloques de un automatismo 1.2. Variable binaria Una variable (a), es una variable binaria si toma únicamente dos valores perfectamente diferenciados, que simbólicamente se designan por (0) y (1). Estos símbolos se pueden asociar a los términos: sí-no, todo-nada, abierto-cerrado, tensión alta-baja, accionado-no accionado, verdadero-falso. Existe un gran número de dispositivos eléctricos, electrónicos, neumáticos o magnitudes físicas que tienen dos estados posibles claramente definidos, a los que se le asigna los valores (0) y (1), pudiéndosele aplicar las leyes del álgebra de Boole.
Variables binarias Un contacto eléctrico se puede representar por la letra (a), teniendo dos estados posibles: abierto o cerrado. Una lámpara (L), puede tener dos estados posibles: encendida o apagada.

6
Módulo 6. Automatismos
1.2.1. Sistemas de numeración De todos los sistemas de numeración existentes, el más conocido es el sistema decimal, que es el que utilizamos habitualmente. Este sistema se construye a partir de diez dígitos: 0, 1, 2, 3, 4, 5, 6, 7, 8 y 9. Cada dígito, además del valor que posee aisladamente, tiene un valor posicional o peso, dependiendo de la posición que ocupa dentro de un grupo de dígitos del que forma parte. Por ejemplo, el número 1286 se puede expresar de la siguiente forma:
1286 = 1000 + 200 + 80 + 6 = 1 x 103 + 2 x 102 + 8 x 101 + 6 x 100 La representación de un número, supone descomponerlo en una suma de productos de cada dígito por el peso correspondiente a su posición, siendo este una potencia de 10. En automatismos se utiliza el sistema binario, compuesto de dos símbolos o dígitos (0) y (1), asimilables a los dos estados que pueden tener un gran número de dispositivos eléctricos, electrónicos y neumáticos (interruptores, relés, lámparas, transistores,...). Cada dígito recibe el nombre de BIT. Un número binario está compuesto por agrupaciones de bits. Los números: 1001, 1111010, 101, 10 están compuestos respectivamente por 4, 8, 3, y 2 bits o dígitos binarios. A un conjunto de 8 bits se le denomina BYTE, y a uno de 16 bits PALABRA (WORD). A cada dígito binario le corresponde un valor posicional o peso. Cada posición es una potencia creciente de dos, siendo el bit que está más a la izquierda, el de mayor peso y el de más a la derecha el de menor peso. Por ejemplo, los pesos correspondientes al número binario 1010 son:
Valor posicional o peso del número binario
Conversión de un número binario a decimal Para obtener el equivalente en decimal de un número binario, se suman los pesos correspondientes a las posiciones de los bits que tienen valor 1. Por ejemplo, obtener el equivalente en decimal del número binario 11101:
7
MANTENIMIENTO INDUSTRIAL
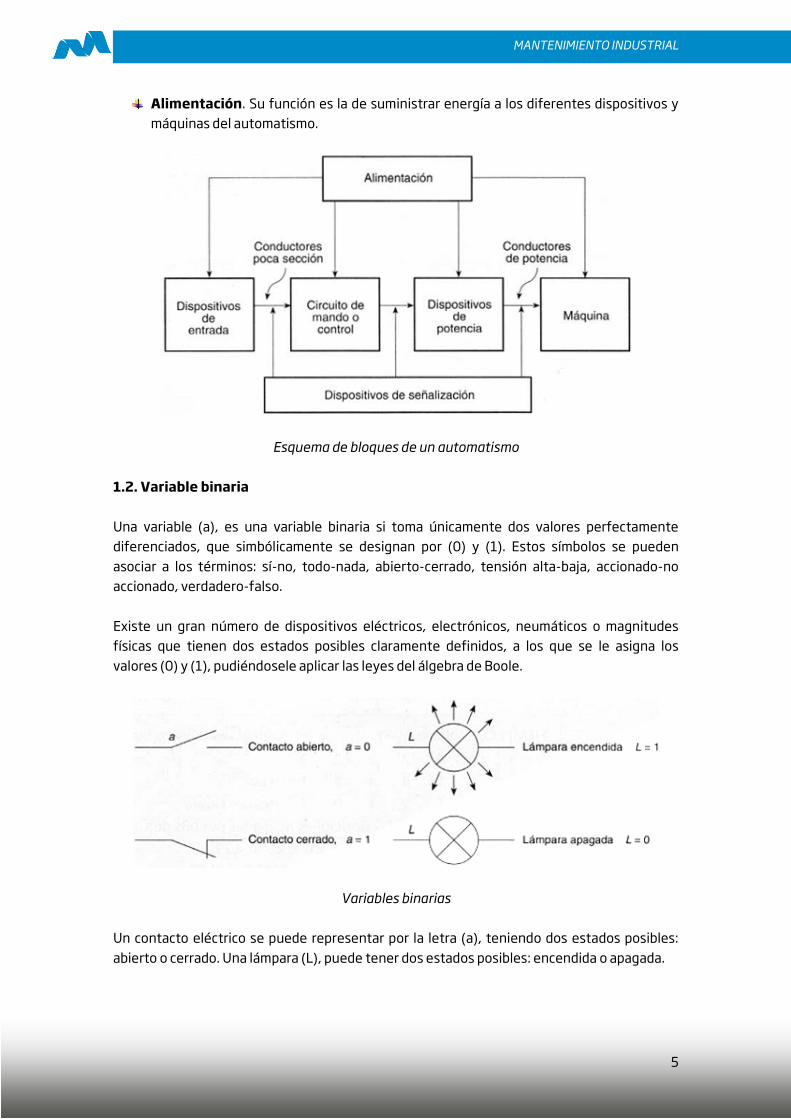
Se suman los pesos de las posiciones ocupadas por bits de valor 1.
16 + 8 +4 + 1 = 29 El equivalente en decimal del número 11101 es el 29.
Conversión de un número decimal a binario Para pasar un número decimal entero a binario, se realizan divisiones sucesivas entre dos, hasta que el último cociente sea la unidad. El número binario se forma con el último cociente, siendo éste el bit más significativo o de mayor peso, y los restos de cada división. Por ejemplo, pasar el número 25 de decimal a binario:
25:2 = 12 → resto = 1 12:2 = 6 → resto = 0 6:2 = 3 → resto = 0 3:2 = 1 → resto = 1 último cociente = 1
El equivalente en binario del número 25 es el 11001. Códigos de numeración Toda la información que procesan los sistemas digitales (ordenadores, autómatas, calculadoras...) está en forma de dígitos binarios o bits (0 y 1), por tanto, cualquier información que vaya a ser procesada por un sistema digital, ya sea un carácter numérico o alfanumérico, deberá ser traducida o codificada a un lenguaje de ceros y unos, que es el que entienden los sistemas. Una información está codificada cuando cada carácter está representado por un conjunto de dígitos binarios. Hay un gran número de códigos, dependiendo de la función a la que se destinen:
Código binario. El sistema de numeración binario, recibe el nombre de código binario natural. A cada número decimal le corresponde una combinación de bits en binario. El número máximo de combinaciones en binario viene determinado por el número de bits de cada combinación. Con (n) bits se pueden obtener (2n) combinaciones diferentes. En la siguiente figura pueden observarse diferentes tipos de código binario natural.

8
Módulo 6. Automatismos
Códigos binarios de 2, 3 y 4 bits
Código reflejado de Gray. Un código reflejado de (n) bits se construye partiendo del código reflejado anterior, repitiendo simétricamente las combinaciones de éste, y añadiendo por la izquierda un bit cero para la mitad de las combinaciones, y un bit uno para la otra mitad. En este código, cada combinación difiere de la anterior y de la siguiente en un solo bit. A continuación se muestran los códigos reflejados de 1, 2, 3 y 4 bits y su construcción a partir del anterior.
Códigos reflejados de 2, 3 y 4 bits
9
MANTENIMIENTO INDUSTRIAL
El código de dos bits se obtiene del código de un bit, reflejando éste sobre la línea de puntos, añadiendo ceros a la izquierda de las posiciones que están por encima del eje, y unos a la izquierda de los reflejados.
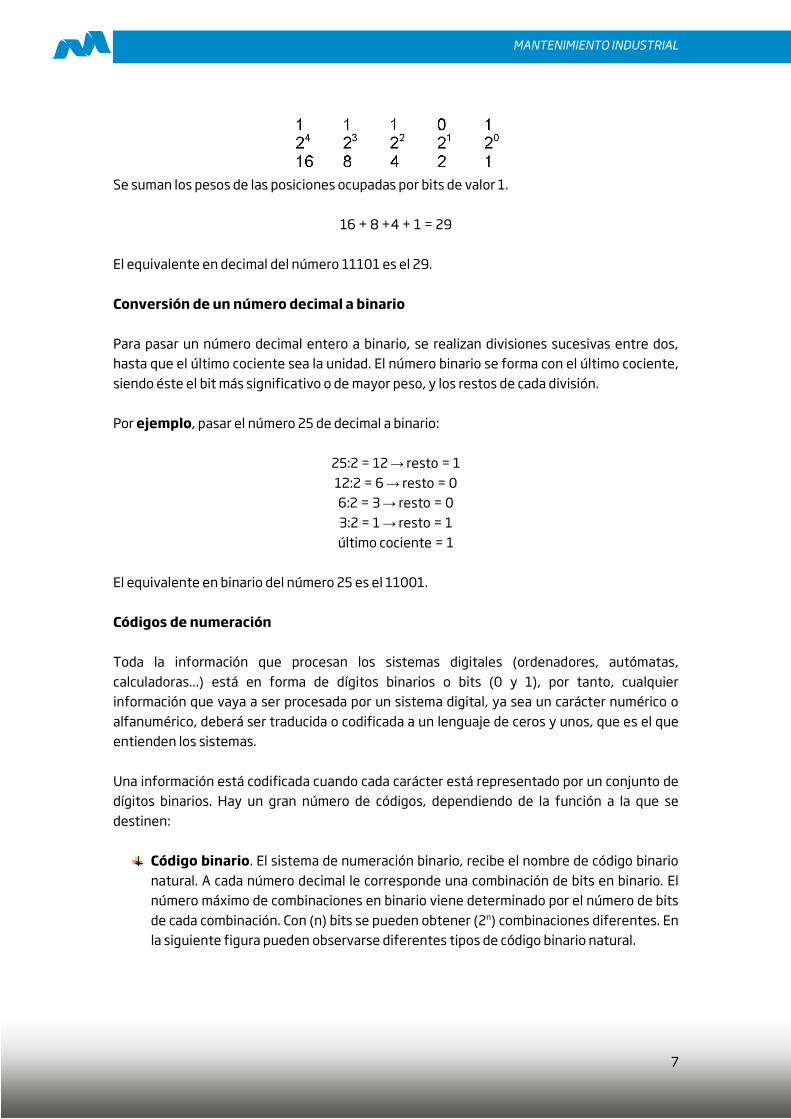
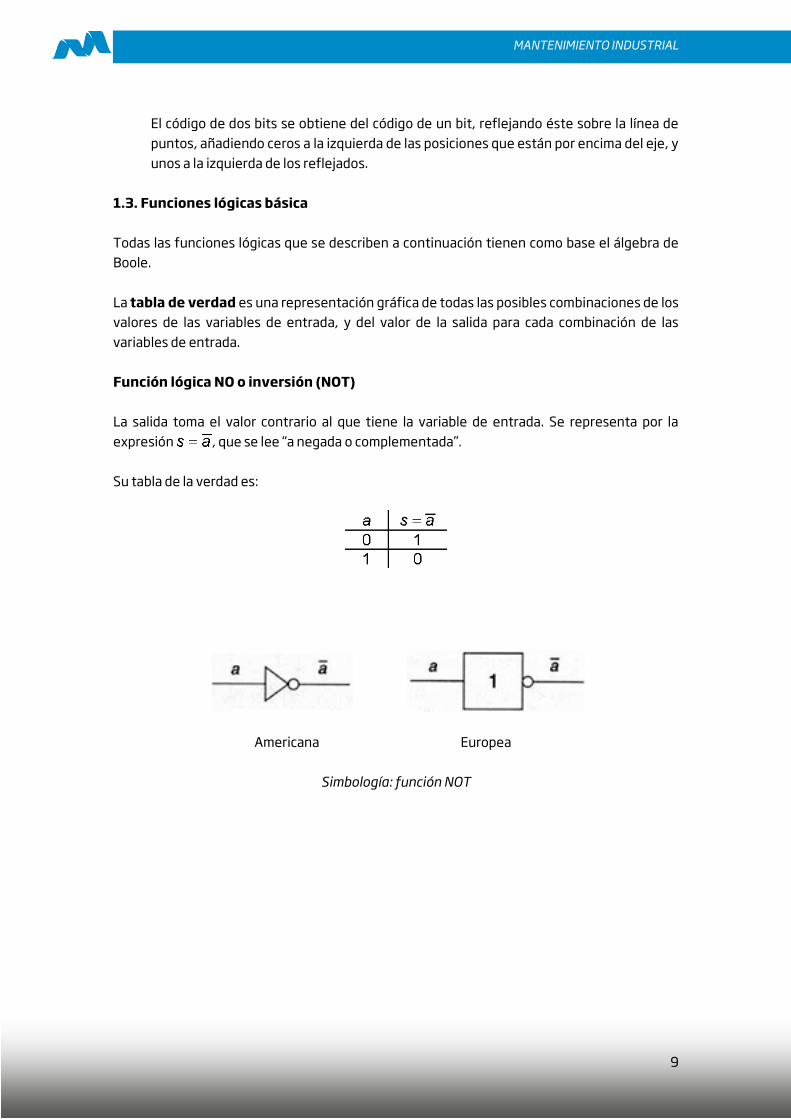
1.3. Funciones lógicas básica Todas las funciones lógicas que se describen a continuación tienen como base el álgebra de Boole. La tabla de verdad es una representación gráfica de todas las posibles combinaciones de los valores de las variables de entrada, y del valor de la salida para cada combinación de las variables de entrada. Función lógica NO o inversión (NOT) La salida toma el valor contrario al que tiene la variable de entrada. Se representa por la expresión , que se lee “a negada o complementada”. Su tabla de la verdad es:
Americana Europea
Simbología: función NOT

10
Módulo 6. Automatismos
A continuación se representa el circuito eléctrico equivalente con pulsador y con relé:
Función NOT con pulsador
Función NOT con relé Función O (OR) Recibe el nombre de suma lógica, y para dos variables se expresa de la siguiente forma:
s = a+b La salida s toma el valor uno, siempre que una de las entradas, o las dos a la vez toman valor uno. Su tabla de verdad es:

11
MANTENIMIENTO INDUSTRIAL
Simbología: función OR. (La salida S toma el valor uno, siempre que una de las entradas, o las dos a la vez toman el valor uno)
Función OR con pulsadores. (Cuando se acciona uno de los pulsadores o los dos a la vez, la
lámpara de enciende)
Función OR con relé. (Cuando se acciona uno de los pulsadores o los dos a la vez, se activa la bobina del relé A, que cierra el contacto A, encendiendo la lámpara S)
Función Y (AND) Recibe el nombre de producto lógico, y para dos variables se expresa de la siguiente forma:
s = a·b La salida s toma el valor uno, únicamente cuando las variables de entrada tienen valor uno, siendo cero para todas las demás combinaciones de entrada.

12
Módulo 6. Automatismos
Su tabla de verdad es:
Simbología: función AND
Función AND con pulsadores. Para que la lámpara se encienda, es necesario que los pulsadores a y b, estén accionados simultáneamente
Función AND con relé. (Cuando se activan los pulsadores a y b simultáneamente, se activa la bobina del relé A, que cierra el contacto A, encendiendo la lámpara S. Para todas las demás
combinaciones de A y B, la lámpara está apagada) Con las funciones descritas NOT, OR y AND) se puede resolver cualquier circuito lógico.

13
MANTENIMIENTO INDUSTRIAL
Función NO Y (NAND) Efectúa el producto lógico de las variables de entrada, invirtiendo el resultado obtenido. Tabla de verdad:
Simbología: función NAND
Función NAND con relé. (La lámpara S permanece siempre encendida, excepto cuando a y b
están accionados simultáneamente, momento en el que se excita la bobina del relé A, abriendo el contacto Ā)
Función NO O (NOR) Efectúa la suma lógica de las variables de entrada, invirtiendo el resultado obtenido. Tabla de verdad:

14
Módulo 6. Automatismos
Simbología: función NOR
Función NAND con relé. Para que la lámpara (S se apague, es necesario accionar el pulsador a
o el pulsador b, o los dos a la vez) Función lógica OR-Exclusiva, (XOR) La función únicamente toma el valor uno, cuando las variables binarias de entrada toman distinto valor. Solo es válida para dos variables. Su tabla de verdad es la siguiente:
Se puede demostrar que:
Simbología: función OR-Exclusiva, XOR

15
MANTENIMIENTO INDUSTRIAL
Función OR-Exclusiva con pulsadores. (La lámpara se encenderá si se acciona a, o se acciona
b. Cuando a y b están los dos abiertos, o los dos cerrados, la lámpara no se enciende)
Función OR-Exclusiva con funciones lógicas básicas Primer Teorema de De Morgan:
Segundo Teorema de De Morgan:
1.4. Función lógica Una función lógica es una variable binaria, cuyo valor depende de una expresión algebraica, formada por otras variables binarias que están relacionadas entre si, por medio de las funciones anteriores. Puede venir dada por una expresión algebraica o por su tabla de verdad. Una función lógica , el valor de la variable S, depende del valor que tomen las variables a, b, c, y que están relacionadas entre sí por las funciones básicas AND, OR y NOT. Utilizando la simbología de cada una de las funciones básicas, el circuito lógico que realiza la función anterior es:

16
Módulo 6. Automatismos
Circuito lógico
Función lógica con relé 1.4.1. Tabla de verdad de una función lógica Es una forma de representación gráfica de una función lógica, en ella se reflejan todas las posibles combinaciones que se pueden formar con las variables de entrada (2n combinaciones, siendo n el número de variables). Las combinaciones van ordenadas en orden creciente, figurando al lado de cada combinación su equivalente en decimal. Se representa por “1”o “0” el valor que toma la función S para cada combinación de las variables de entrada. Las variables están ordenadas de menor a mayor peso, empezando por la que está situada a la derecha. A continuación se representa una tabla de verdad de una función lógica de tres variables. Las tablas de verdad constituyen un buen método para describir el funcionamiento de un automatismo o circuito lógico.

17
MANTENIMIENTO INDUSTRIAL
Forma canónica de una función Se llama forma canónica de una función lógica, a la expresión algebraica de la función en la que aparecen en cada término todas las variables de entrada, bien en su forma directa o en forma inversa. Se denomina término canónico de una función lógica a aquel en el que están presentes todas las variables de entrada. En la función de tres variables , sólo existe un término en forma canónica, a.b.c, porque es el único en el que están presentes las tres variables de la función. Por tanto una función lógica estará en forma canónica cuando en la expresión algebraica de la función, todos los términos que intervienen están expresados en forma canónica. En la función , los tres términos están expresados de forma canónica. Minterm y maxterm Se denomina “minterm”, los términos canónicos cuyas variables están relacionadas entre sí por un producto. En el caso de la función anterior los tres términos son minterm. Decimos que la función lógica está expresada en suma de productos. Se denomina “maxterm”, cuando las variables de cada término canónico están relacionadas entre sí por la suma lógica.
La función , está expresada en producto de sumas. Todas las funciones lógicas se pueden expresar de las dos formas canónicas anteriores, en forma de suma de productos o producto de sumas. A continuación se describe el procedimiento para obtener las formas canónicas de una función, a partir de su tabla de verdad. Partimos de la siguiente tabla de verdad:

18
Módulo 6. Automatismos
Obtención de los minterm o suma de productos Se forman sumando todos los términos canónicos de la función que toman el valor 1. Cada término canónico se obtiene de forma inmediata, asignando al estado 1 la variable en su forma directa y al estado 0 la variable en su forma inversa. El término canónico correspondiente a la combinación 101 es . Los correspondientes a las combinaciones 001 y 010 son respectivamente . Luego la forma canónica de la función representada en la tabla queda: . Obtención de los maxterms o producto de sumas Observamos en la tabla de verdad las combinaciones de entrada para las cuales la función toma el valor 0. Para obtener cada término canónico, se les asigna al estado 0, la variable en su forma directa y al estado 1, la variable en su forma inversa. Así la combinación 100, es (ā + b + c). Aplicando este método a todas las demás combinaciones, la forma canónica de la función lógica expresada en producto de sumas es:
1.5. Simplificación de funciones lógicas Hay varios métodos para simplificar funciones lógicas, desde métodos algebraicos a diferentes métodos tabulares. Vamos a utilizar el método tabular de Karnaugh, útil para un número reducido de variables (entre 2 y 5). Este método, consiste en representar de una forma gráfica, en una tabla o mapa, todas las posibles combinaciones o términos canónicos de una función lógica.

19
MANTENIMIENTO INDUSTRIAL
Según el número de variables que tenga la función lógica a simplificar se pueden representar mapas de 2, 3, 4, variables como se indica en la figura. Para 5 variables resulta más compleja la simplificación. Cada cuadro del mapa representa una combinación binaria de la función. Los cuadros que tienen un lado común son gráficamente adyacentes. Esto quiere decir, que las combinaciones representadas en estos cuadros varían en un solo bit, de modo que se pueden simplificar y reducirse a un término, en el que se suprime la variable que es diferente en ambos. Por ejemplo, los cuadros correspondientes a las combinaciones 1010 y 1110 son adyacentes, varían únicamente en un bit. Se suprimirá la variable c. Los cuadros de la primera línea también son adyacentes con los de la última línea, y los cuadros de la columna lateral de la izquierda, con los de la columna lateral derecha. El procedimiento a seguir para simplificar una función lógica es el siguiente:
Si la función está expresada en suma de productos, colocamos un 1 en aquellos cuadros correspondientes a las combinaciones para las que la función toma el valor 1.
Se forman grupos de unos que sean adyacentes. Cada grupo debe estar formado por un grupo de cuadros que sea potencia de dos (1, 2, 4, 8, 16).
Se agrupan el mayor número de cuadros que tengan el valor 1, y que sean adyacentes, y se termina por aquellos cuadros que tengan un 1, y que no se puedan agrupar con ningún otro.
Para simplificar: un cuadro con un 1 (aunque haya sido ya agrupado) se puede unir con otros cuadros las veces que sea necesario, para formar nuevos grupos.
Una vez realizados todos los posibles grupos, se procede a simplificar. Si en lugar de simplificar la función por los unos, se hace por los ceros (producto de sumas), el procedimiento es análogo, con la salvedad de que se agrupan los ceros, siguiendo las reglas especificadas anteriormente.

20
Módulo 6. Automatismos
Ejemplo Dada la tabla de verdad de la figura, simplificar la función S:
Siguiendo las reglas anteriores, podemos formar los grupos de unos que se especifican en el mapa de Karnaugh de la figura.
Hay un grupo de 4 unos, formado por los cuadros correspondientes a las combinaciones 0001, 0101, 0011, 0111.
Un grupo de 4 unos formado por los cuadros 0000, 0001, 0011, 0010. Un grupo de 2 unos formados por los cuadros 0000, 1000. Aunque el 1 del cuadro
0000, haya sido agrupado, se puede tomar de nuevo para formar otro grupo con el del cuadro 1000. Los dos cuadros son gráficamente adyacentes, ya que los cuadros de la columna izquierda son adyacentes con los de la derecha.
Un grupo de 2 unos formado por los cuadros 0011, 1011. Queda el uno del cuadro 1101, que no se puede agrupar con nadie.
Una vez realizados los grupos se procede a la simplificación. El término que corresponde a cada grupo, se obtiene eliminando la variable que toma el valor 0 en la mitad de los cuadros, y el valor 1 en la otra mitad. A la variable que queda se le asigna el valor 1 si está en forma directa y el 0 si está en forma inversa. En el grupo formado por (0000, 0001, 0011, 0010), se observa que la variable a, toma el valor 0 para todos los cuadros; la variable b, toma el valor 0 para la mitad de los cuadros y el valor 1 para la otra mitad; la variable c, toma el valor 0 para la mitad de los cuadros y el valor 1 para la otra mitad; la variable d, toma el valor 1 para todos los cuadros. Por tanto las variables que se eliminan son las variables b y c. El término que queda como resultado de la simplificación es ā·d. Se procede de la misma forma para el grupo (0000, 0001, 0011, 0010). Las variable a y b toman el mismo valor para todos los cuadros, mientras que las variable c y d toman el valor 0 y 1 para la mitad de ellos. El término simplificado es ā·b.

21
MANTENIMIENTO INDUSTRIAL
Para el grupo formado por 0000 y 1000, se obtiene el término . Para el grupo formado por 0011 y 1011 se obtiene el término . El grupo del cuadro 1110 no se puede simplificar, porque no se puede agrupar con ningún otro cuadro, y le corresponde el término . La función simplificada queda:
La simplificación es fundamental para la realización de circuitos lógicos, porque permite reducir el número de funciones lógicas básicas a utilizar en su implementación. 2. Simbología y aparatos para automatismos 2.1. Introducción A partir de 1920 con la explotación de nuevos recursos con la generalización del uso del petróleo y la electricidad, se origina un importante desarrollo que más tarde desembocará en la automatización de las fábricas. Aunque los precedentes de la automatización son anteriores, este concepto se introduce en la industria del automóvil y de manera muy notable, en la industria textil a comienzos de la década de los 50. En un principio, la automatización se limita a ciertas operaciones sencillas que consiguen realizarse sin intervención humana. Con el continuo desarrollo de la aparamenta eléctrica y la aparición del contactor y los relés, se llega a que la automatización esté presente en todo proceso industrial. Esto repercute en un ahorro de tiempo, mano de obra y una producción más uniforme. Se consigue mejorar la productividad y aumentar la calidad. También se incrementa la seguridad de los trabajadores, encargando a las máquinas automatizadas hacer las tareas peligrosas y repetitivas. El gran desarrollo de los aparatos para automatismos (contactores, relés, pulsadores etc.) hace necesario que la normalización internacional, cada vez adoptada por más países, y que la automatización se estandarice, sea más fácil el diseño de procesos automatizados y el intercambio de tecnología.

22
Módulo 6. Automatismos
Esquema conceptual

23
MANTENIMIENTO INDUSTRIAL
2.2. Simbología y normalización Una norma es el resultado de hacer que un determinado producto, instalación o proceso, siga los mismos criterios constructivos de composición, dimensión, etc. Lo que se pretende es dar uniformidad a los productos. Quiere esto decir que una instalación hecha en diferentes puntos geográficos seguirá los mismos criterios dentro de su ámbito de aplicación. Decimos que un producto está normalizado en un país cuando las fases de producción, las medidas, la composición y la representación son las mismas en cualquier parte del país que se fabrique. Las ventajas que se obtienen de la normalización son las siguientes:
Simplificación del proceso productivo. Disminución del tipo de productos fabricados. Mejoras en el diseño. Aumento de calidad. Posibilidad de automatización del proceso productivo.
Por el ámbito de aplicación las normas pueden ser nacionales, internacionales, de sectores productivos, de empresas, etc. En España la norma aplicada es la norma UNE (Una Norma Española), y está regida por la asociación A.E.N.O.R. Antes de llegar a una norma existe un proceso que comprende una serie de fases antes de su aprobación:
Estudio de la necesidad de implantación. Proyecto de norma. Estudio de la propuesta. Conclusiones finales y publicación en el B.O.E. (Boletín Oficial del Estado).
Las normas se publican en formato A4 y en su portada figuran el título, comité técnico, número y año de aprobación.

24
Módulo 6. Automatismos
Dentro de las normas nacionales cada país tiene su propia normativa, así en España existe la norma UNE, en Francia AFNOR, en Italia UNI, en Inglaterra la BS, etc. A nivel internacional se utiliza la CEI y la EN, norma Europea. En cuanto a la simbología para automatismos, todos los países de la Comunidad Económica Europea están utilizando con mayor asiduidad la norma EN, dado que las principales empresas productoras de aparatos eléctricos venden sus productos a todos los países de la CEE. La simbología que utilizaremos para diseñar símbolos compuestos y esquemas será la UNE, complementada con la CEI y EN, por su coincidencia en muchos de los aspectos. 2.2.1. Símbolos Para la representación de esquemas se utilizan los símbolos literales de la norma CEI. Como los símbolos de todos los aparatos no están incluidos se pueden dibujar como combinación de éstos. Cuando sea necesario utilizar simbología no incluida en la norma, se permite el uso de otros símbolos siempre que se incluya una explicación clara de su significado. Por ejemplo todos los aparatos de un esquema no los podemos representar con los símbolos literales publicados por una norma, y muchos de ellos están compuestos por varios de esos símbolos.
Para representar un contactor tripolar utilizamos símbolos del contactor unipolar y enlace mecánico.
Para representar un pulsador utilizamos los símbolos de contacto abierto y de pulsador automático.

25
MANTENIMIENTO INDUSTRIAL
2.2.2. Identificación de aparatos Según la norma UNE, los aparatos se identifican con tres signos:
1º. Una letra que indica la clase de aparato. 2º. Un número nos indica el número dentro del esquema. 3º. Una letra nos indica la función.
Por ejemplo si en un esquema tenemos un aparato marcado con, K3M tiene el siguiente significado.
Aunque sólo es de obligado cumplimiento el número, debido a la complejidad cada vez mayor de los circuitos se deben poner los tres signos de identificación. La norma CEI, cada vez más extendida, utiliza dos letras de clase y función seguidas y después el número para identificar los aparatos dentro de un esquema. Por ejemplo:
2.2.3. Marcado de bornes Según la norma CEI los bornes de los aparatos se marcan con la siguiente numeración: Bobinas de mando electromágnetico y señalización

26
Módulo 6. Automatismos
Contactores contactos principales Los bornes de entrada se marcan con una cifra impar y el borne de salida con la inmediata superior.
Contactores contactos auxiliares de mando

27
MANTENIMIENTO INDUSTRIAL
Contactores temporizados
Relés térmicos

28
Módulo 6. Automatismos
2.3. Esquemas de un automatismo eléctrico Los esquemas de un automatismo eléctrico son representaciones simplificadas de un circuito independiente de la clase de esquema siempre se deben perseguir los siguientes objetivos:
Expresar de una forma clara el funcionamiento del circuito y de cada uno de sus aparatos.
Facilitar la localización de cada aparato y sus dispositivos dentro del circuito. Normalización de la simbología y del método de trabajo.
Por el número de elementos que se representan con un mismo símbolo pueden ser:
a. Esquemas unifilares, cuando se representan con un mismo trazo varios conductores o elementos que se repiten. Se utilizan para los circuitos de potencia de sistemas polifásicos en los que se dibuja una fase y se indica sobre el conductor a cuántas fases se extiende según sea bifásico, trifásico, etc.
Esquema unifilar trifásico b. Esquemas multifilares, cuando se representan todos los conductores y elementos
cada uno con su símbolo. Se utilizan en la representación de los circuitos de mando, donde cada elemento realiza funciones diferentes, y para representar circuitos de potencia de automatismos.

29
MANTENIMIENTO INDUSTRIAL
Esquema mutifilar trifásico Por el lugar en que están situados los dispositivos de un mismo aparato dentro del esquema existen los siguientes tipos de representación:
a. Representación conjunta: todos los símbolos de dispositivos de un mismo aparato están representados próximos entre sí y se aprecia la función de cada uno de ellos en su conjunto. Está representación está en desuso por la complejidad a que se llega en circuitos de grandes dimensiones.
Representación conjunta

30
Módulo 6. Automatismos
b. Representación semidesarrollada: los símbolos de dispositivos de un mismo aparato están separados, aunque situados de manera que las uniones mecánicas se definen con claridad.
Representación semidesarrollada
c. Representación desarrollada: los símbolos de dispositivos de un mismo aparato están separados y las uniones mecánicas entre ellos no se dibujan. En este tipo de representación deben estar identificados todos los dispositivos y aparatos para que quede clara la actuación y la secuencia de cada uno de ellos.
Representación desarrollada

31
MANTENIMIENTO INDUSTRIAL
2.3.1. Esquema de mando El esquema de mando es una representación de la lógica del automatismo, deben estar representados los siguientes elementos:
Bobinas de los elementos de mando y protección (contactores, relés, etc.). Elementos de diálogo hombre-máquina (pulsadores, finales de carrera, etc.). Dispositivos de señalización (pilotos, alarmas, etc.). Contactos auxiliares de los aparatos.
Todos los elementos deben estar identificados por la clase de aparato, número y función. El dibujo del esquema de mando se realiza sobre formato A4 con trazo más fino que el circuito de potencia, según norma UNE 0,5 mm. si el circuito es sencillo se pueden dibujar en la misma hoja el esquema de potencia, a la izquierda, y el de mando a la derecha, cuando esto no sea posible se dibuja primero el de potencia y después el de mando. Se utilizaran más hojas numerando el orden sobre el total, así 1/5, 2/5, 3/5... nos indica que el total de hojas son 5 y la cifra primera el orden que ocupa.
Esquema de mando

32
Módulo 6. Automatismos
Para la localización de elementos dentro del esquema el método más utilizado es el de cuadrícula, que consiste en numerar la parte superior de las hojas (abcisas) 1, 2, 3, etc., y en la parte izquierda (ordenadas) con las letras A, B, C, etc., según sea necesario. El dibujo queda dividido en cuadrículas de manera que tendremos localizados los aparatos con las coordenadas que ocupan en el dibujo. Las cuadrículas no tienen por qué ser iguales, ajustándose a las necesidades del esquema. Cuando la complejidad del esquema lo requiera se utilizarán anexos. En los esquemas de mando, lo más habitual es dibujar debajo de cada aparato sus contactos y un número que nos indica dónde están localizados en el esquema (referencias cruzadas). Otra manera de representar las referencias es en forma de tabla, indicando el tipo de contacto abierto o cerrado y un número debajo que nos indica dónde se encuentra en el esquema. 2.3.2. Esquema de potencia El esquema de potencia es una representación del circuito de alimentación de los accionadores (motores, líneas, etc.). En este esquema figuran los contactos principales de los siguientes elementos:
Dispositivos de protección (disyuntores, fusibles, relés, etc.) Dispositivos de conexión-desconexión (contactores, interruptores, etc.) Actuadores (motores, resistencias, etc.)
Todos los elementos estarán identificados con la letra de clase de aparato, número y función. El dibujo del esquema de potencia se realiza sobre formato A4, con trazos más gruesos que el circuito de mando, según norma UNE 0,7mm. para el circuito de potencia 0,5 para el circuito de mando.
Esquema de potencia

33
MANTENIMIENTO INDUSTRIAL
El circuito de potencia se coloca a la izquierda del circuito de mando correspondiente, en automatismos sencillos. En caso de automatismos más complejos se hace primero el esquema de potencia y después el esquema de mando, se utilizan las hojas necesarias numerando el orden sobre el total, así 1/10, 2/10, 3/10, etc. nos indica que el total de hojas es 10, y la primera cifra la numeración dentro del total. Para la localización de todos los elementos dentro del esquema el método más utilizado es el de la cuadrícula, que ya hemos explicado en el apartado anterior. 2.4. Aparatos que forman un sistema automático La aparamenta (aparatos eléctricos) que interviene en un sistema automático se puede clasificar según la función que realiza y la fase en que interviene. Básicamente en un automatismo eléctrico tenemos los siguientes grupos.
a. Captadores: recogen información del estado actual del sistema (variables de entrada). Está formado por los interruptores de posición, finales de carrera, y los detectores (inductivos, capacitivos, fotoeléctricos, termostatos, etc.)
b. Tratamiento de datos: según sea el automatismo de ciclo combinatorio o de ciclo secuencial y la importancia del sistema, está compuesto por relés de automatismos, contactores auxiliares, células lógicas, o autómatas programables.
c. Mando y control: los circuitos de mando son activados por los datos disponibles en la unidad de tratamiento. Esta unidad la componen las bobinas de relés y contactores, arrancadores, distribuidores etc.
d. Diálogo hombre-máquina: permite al operario el arranque y parada de un ciclo y controlar el estado en que se encuentra el sistema. Este grupo lo forman los pulsadores, conmutadores, elementos de señalización, teclados, etc.
2.4.1. Contactor El contactor es un aparato de conexión-desconexión, con una sola posición de reposo y mandado a distancia, que vuelve a la posición desconectado cuando deja de actuar sobre él la fuerza que le mantenía conectado. Interviene en el circuito de potencia a través de sus contactos principales y en la lógica del circuito de mando con los contactos auxiliares. Por su forma de accionamiento puede ser:
Electromagnéticos: accionados por un electroimán.
34
Módulo 6. Automatismos
Electromecánicos: accionados por medios mecánicos. Neumáticos: accionados por la presión del aire. Hidráulicos: accionados por la presión de un líquido.
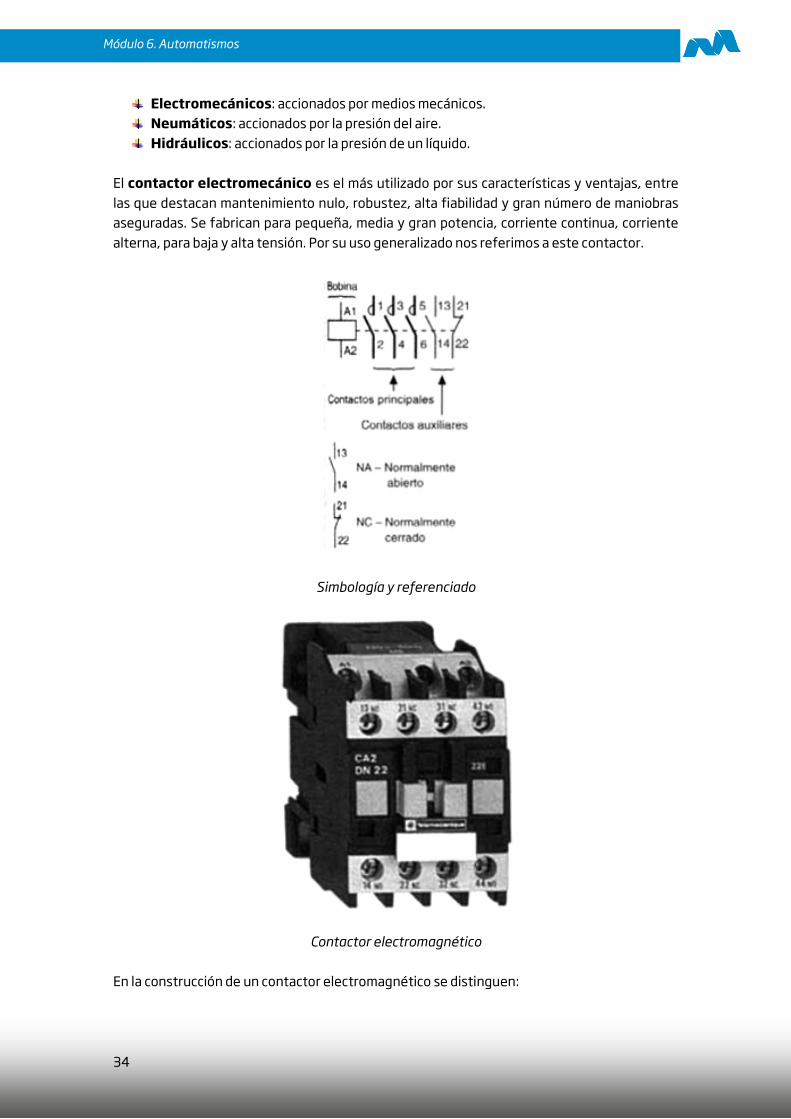
El contactor electromecánico es el más utilizado por sus características y ventajas, entre las que destacan mantenimiento nulo, robustez, alta fiabilidad y gran número de maniobras aseguradas. Se fabrican para pequeña, media y gran potencia, corriente continua, corriente alterna, para baja y alta tensión. Por su uso generalizado nos referimos a este contactor.
Simbología y referenciado
Contactor electromagnético En la construcción de un contactor electromagnético se distinguen:

35
MANTENIMIENTO INDUSTRIAL
a. Circuito magnético. Está formado por el núcleo, armadura y bobina:
El núcleo es una pieza de chapa magnética si el contactor es de corriente alterna o hierro dulce si es de corriente continua, está situado en el interior de la bobina y es el encargado de atraer la armadura cuando ésta es excitada.
La armadura está constituida del mismo material que el núcleo, transmite el movimiento a los contactos cuando es atraída por el núcleo.
La bobina es un carrete de espiras de hilo esmaltado que al ser recorrida por la corriente, crea un campo magnético en el núcleo. La bobina del contactor puede estar alimentada por una tensión diferente a la utilizada en el circuito de potencia. Por ejemplo 24V en CC para la bobina y 380V en AC para un motor.
b. Contactos. Los contactos son los encargados de la conexión y desconexión, los
contactos principales actúan en el circuito de potencia y los auxiliares en el circuito de mando.
c. Resortes. Los resortes están constituidos por muelles de presión, su función es regular la presión entre contactos y muelles antagonistas encargados de separar bruscamente los contactos en la desconexión.
d. Cámaras. Las cámaras de extinción son compartimentos donde se alojan los contactos, son las encargadas de alargar, dividir, y extinguir el arco.
e. Soportes. El soporte es el armazón donde están fijadas todas las piezas que componen el contactor.
Partes de un contactor Cuando por la bobina del contactor circula una corriente, la bobina atrae al núcleo, los contactos principales se cierran y los contactos auxiliares se conmutan (los NA se cierran y los NC se abren). Esta situación se mantiene hasta que deje de circular corriente por la bobina. Los contactos principales deben ser capaces de soportar la intensidad de servicio tanto en funcionamiento normal como en sobrecarga.

36
Módulo 6. Automatismos
Elección de un contactor Para elegir el contactor de un circuito se deben tener en cuenta aspectos como:
a. Poder de corte: valor de la intensidad que un contactor es capaz de interrumpir bajo una tensión dada y en las condiciones prescritas de empleo y funcionamiento.
b. Poder de cierre: valor de la intensidad que un contactor es capaz de restablecer bajo una tensión dada y en las condiciones prescritas de empleo y funcionamiento.
c. Intensidad de servicio: el valor de la intensidad permanente que circula por sus contactos principales.
d. Vida de un contactor: el tiempo en años que dura un contactor según las condiciones de servicio.
año al trabajados meses de nº×mes por horas de nº×hora por maniobras de ºncategoría y cortada corriente de función en robusted
=vida
La norma UNE 20-109-89 establece categorías de empleo para los contactores según el tipo de carga, características y condiciones de trabajo.
Categoría Aplicaciones
CORR
IENT
E AL
TERN
A AC-1 Cargas no inductivas o débilmente inductivas, hornos de resistencia
AC-2 Motores de anillos: arranque, inversión de marcha
AC-3 Motores de rotor en cortocircuito: arranque, desconexión a motor lanzado
AC-4 Motores de rotor en cortocircuito: arranque, marcha a impulsos, inversión de marcha
CORR
IENT
E CO
NTIN
UA DC-1 Cargas no inductivas o débilmente inductivas, hornos de resistencia
DC-2 Motores Shunt: arranque, desconexión a motor lanzado
DC-3 Motores Shunt: arranque, inversión de marcha, marcha a impulsos
DC-4 Motores serie: arranque, desconexión a motor lanzado
DC-5 Motores serie: arranque, inversión de marcha, marcha a impulsos
Clasificación de contactores por el tipo de carga
Por inversión de marcha se entiende la parada o la inversión rápida del sentido de rotación del motor al permutar las conexiones de alimentación mientras el motor aún está girando. Por marcha a impulsos se entiende un tipo de maniobra caracterizado por uno o varios cierres breves y frecuentes del circuito del motor, con objeto de conseguir pequeños desplazamientos del mecanismo accionado.

37
MANTENIMIENTO INDUSTRIAL
Categoría
De empleo Valor de la intensidad de empleo asignada
Cierre Corte Ie/I Ur/Ue Cos φ2 Ie/I Ur/Ue Cos φ2
Corr
ient
e al
tern
a1
AC-1 Cualquier valor 1,5 1,1 0,95 1,5 1,1 0,95 AC-2 Cualquier valor 4 1,1 0,65 4 1,1 0,65 AC-3
Ie ≤ 17 A 17 A < Ie ≤ 100 A
Ie > 100 A
10 10 83
1,1 1,1 1,1
0,65 0,35 0,35
8 8 64
1,1 1,1 1,1
0,65 0,35 0,35
AC-4
Ie ≤ 17 A 17 A < Ie ≤ 100 A
Ie > 100 A
12 12
105
1,1 1,1 1,1
0,35 0,35 0,35
10 10 83
1,1 1,1 1,1
0,35 0,35 0,35
Corr
ient
e co
ntin
ua
Ic/Ie Ur/Ue L/R6 (ms)
Ic/Ie Ur/Ue L/R6 (ms)
DC-1
- - - - - -
DC-2 motores DC-3 shunt
Cualquier valor 4 1,1 2,5 4 1,1 2,5 Cualquier valor 4 1,1 2,5 4 1,1 2,5
DC-4 motores DC-5 serie
Cualquier valor 4 1,1 15 4 1,1 15 Cualquier valor 4 1,1 15 4 1,1 15
Verificación de los poderes de cierre y de corte asignados. Condiciones de cierre y corte correspondientes a las diversas categorías de empleo. (I = Intensidad establecida; Ie =
Intensidad de empleo asignada; It = Intensidad cortada; U = Tensión antes del cierre; Ue = Tensión de empleo asignada; Ur = Tensión de restablecimiento; 1 En corriente alterna, las
condiciones de cierre se expresan en valor eficaz, sobreentendiéndose que el valor de cresta de la intensidad asimétrica, puede alcanzar un valor más equilibrado; 2 Tolerancia para cos φ: ± 0,05; 3 Como mínimo 1000 A para Ic; 4 Como mínimo de 500 A para Ic; 5 Con un mínimo de
1200 A para I; 6 Tolerancia para UR: ± 15 %) Ejemplo Para elegir un contactor debemos tener en cuenta el tipo de carga, las posibles sobrecargas, el número de maniobras y el factor de potencia, además debemos tener presente el tipo de carga, el poder de cierre y el poder de corte. Elección de un contactor para un circuito que alimenta un motor de jaula de ardilla con las siguientes características. Tensión 220V trifásica. Potencia, 10 KW, cos φ≥ 0,7.
1º. Según la norma corresponde una categoría AC3. 2º. La intensidad de servicio es de 37,5A.
A 5,37=7,0×220×3
10000=I
38
Módulo 6. Automatismos
3º. El poder de cierre está asegurado por la tabla 2. La intensidad de arranque de estos
motores no alcanza 10 veces la intensidad nominal. 4º. Elegiremos un contactor de intensidad nominal de 40A en categoría AC-3
2.4.2. Relé Un relé es un dispositivo que aprovecha el cambio de las características de funcionamiento de otros dispositivos, para actuar en el circuito o en otros circuitos eléctricos. De acuerdo con su función dentro del circuito los podemos clasificar en:
Relés de protección. Su misión es proteger un circuito contra condiciones anormales de funcionamiento (sobrecargas, sobretensiones, etc.).
Relés de mando. Son utilizados en la lógica del circuito de mando. Relés de medida. También llamados relés de regulación, su funcionamiento se debe a
alguna modificación de las características del circuito (de mínima y máxima corriente, subtensión o sobretensión, medida de resistencia de un líquido, etc.).
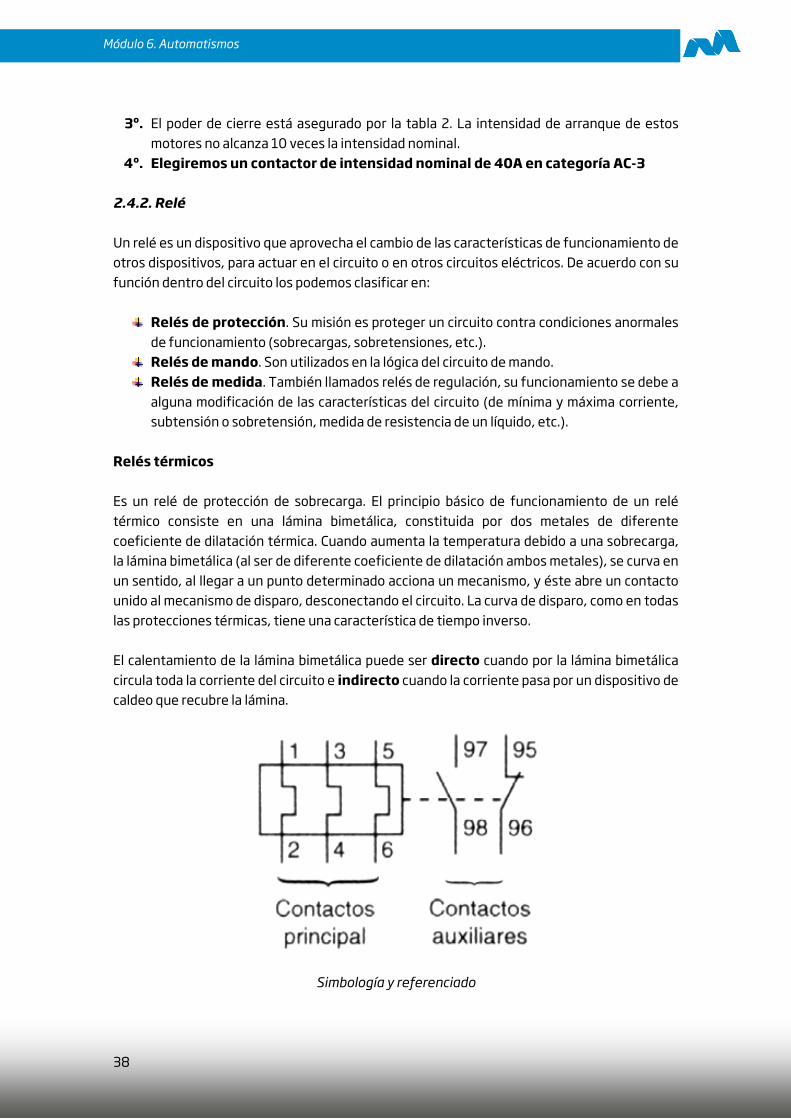
Relés térmicos Es un relé de protección de sobrecarga. El principio básico de funcionamiento de un relé térmico consiste en una lámina bimetálica, constituida por dos metales de diferente coeficiente de dilatación térmica. Cuando aumenta la temperatura debido a una sobrecarga, la lámina bimetálica (al ser de diferente coeficiente de dilatación ambos metales), se curva en un sentido, al llegar a un punto determinado acciona un mecanismo, y éste abre un contacto unido al mecanismo de disparo, desconectando el circuito. La curva de disparo, como en todas las protecciones térmicas, tiene una característica de tiempo inverso. El calentamiento de la lámina bimetálica puede ser directo cuando por la lámina bimetálica circula toda la corriente del circuito e indirecto cuando la corriente pasa por un dispositivo de caldeo que recubre la lámina.
Simbología y referenciado
39
MANTENIMIENTO INDUSTRIAL
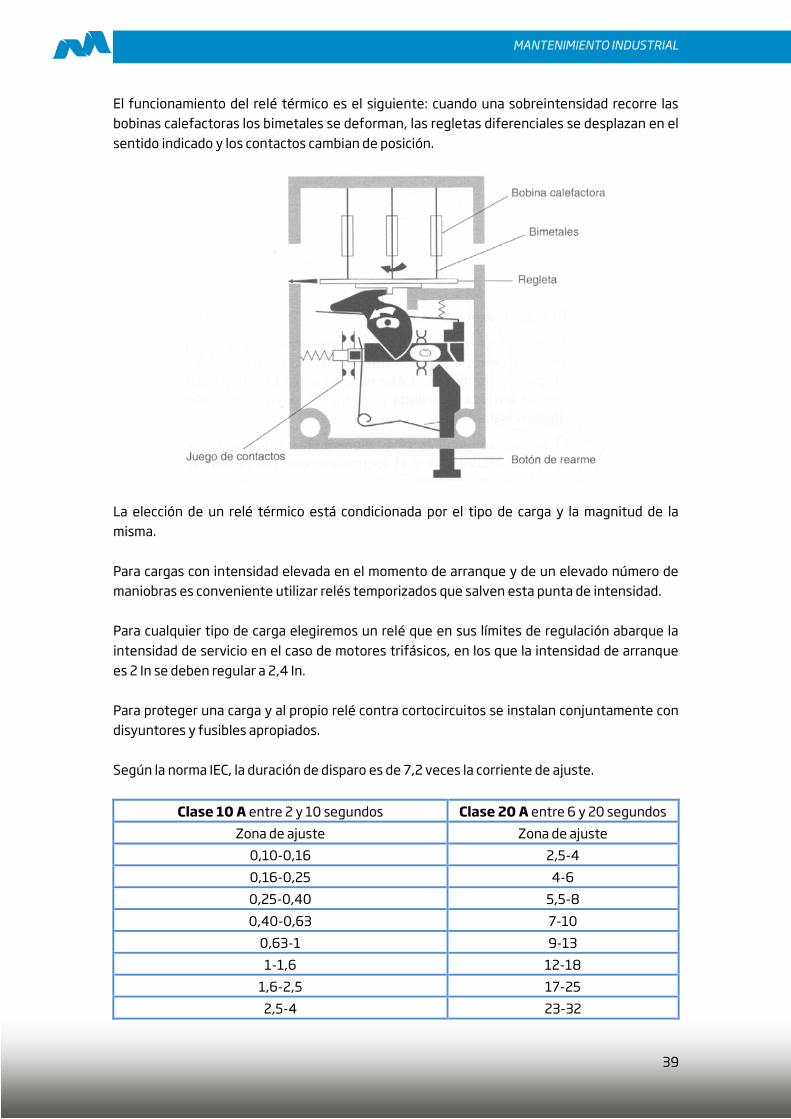
El funcionamiento del relé térmico es el siguiente: cuando una sobreintensidad recorre las bobinas calefactoras los bimetales se deforman, las regletas diferenciales se desplazan en el sentido indicado y los contactos cambian de posición.
La elección de un relé térmico está condicionada por el tipo de carga y la magnitud de la misma. Para cargas con intensidad elevada en el momento de arranque y de un elevado número de maniobras es conveniente utilizar relés temporizados que salven esta punta de intensidad. Para cualquier tipo de carga elegiremos un relé que en sus límites de regulación abarque la intensidad de servicio en el caso de motores trifásicos, en los que la intensidad de arranque es 2 In se deben regular a 2,4 In. Para proteger una carga y al propio relé contra cortocircuitos se instalan conjuntamente con disyuntores y fusibles apropiados. Según la norma IEC, la duración de disparo es de 7,2 veces la corriente de ajuste.
Clase 10 A entre 2 y 10 segundos Clase 20 A entre 6 y 20 segundos Zona de ajuste Zona de ajuste
0,10-0,16 2,5-4 0,16-0,25 4-6 0,25-0,40 5,5-8 0,40-0,63 7-10
0,63-1 9-13 1-1,6 12-18
1,6-2,5 17-25 2,5-4 23-32

40
Módulo 6. Automatismos
Clase 10 A entre 2 y 10 segundos Clase 20 A entre 6 y 20 segundos 4-6 28-36
Clasificación según la intensidad de ajuste y el tiempo de disparo
Relés magnetotérmicos También son relés de protección de sobrecarga que reúnen en un solo aparato las ventajas del relé térmico (disparo a tiempo inverso) y los relés electromagnéticos (disparo instantáneo). Están indicados para proteger contra sobrecargas por desconexión térmica retardada y contra cortocircuitos o sobrecargas muy elevadas por desconexión con disparo instantáneo.
Simbología y referenciado de bornas El funcionamiento es el siguiente: el arrollamiento primario es recorrido por la corriente a controlar y el secundario está conectado al bimetal, la intensidad que circula por el primario crea un campo de forma que parte de él tiende a atraer la paleta hacia el núcleo y parte induce en el secundario una corriente que calienta el bimetal. La gráfica de tiempos de disparo está compuesta por dos campos: uno corresponde al disparo a tiempo inverso, zona curva (protección térmica) y a partir de un determinado valor de la intensidad; el otro, una recta que corresponde al disparo instantáneo (protección electromagnética). Para la elección de un magnetotérmico se deben tener en cuenta las características eléctricas y el tipo de curva de disparo. Según norma UNE-EN 60.968:6000 se fabrican para cuatro tipos de curva.

41
MANTENIMIENTO INDUSTRIAL
Curva tipo Disparo magnético Aplicaciones
B Entre 3 In y 5 In Protección de cables C Entre 5 In y 10 In Instalaciones industriales
D Entre 10 In y 14 In Cargas con intensidad elevada en el
arranque Z Entre 2,4 In y 3,6 In Circuitos electrónicos
Por ejemplo si queremos proteger un circuito electrónico con una intensidad nominal de 2A. Elegimos en el mercado un magnetotérmico con protección térmica de 2 A y disparo magnético (tipo de curva z) entre 5 y 7 A. Relés temporizados En todo sistema automatizado son frecuentes las partes en las que hay que incluir retardos a una o varias acciones. Existe un gran número de sistemas de temporización según los principios físicos en que se basan. Existen temporizaciones magnéticas, electrónicas, térmicas, neumáticas, etc. Cuando los tiempos de temporización no son demasiado grandes (arrancadores para motores), se utilizan los juegos de contactos temporizados de forma neumática que se acoplan directamente sobre el contactor.
Simbología y referenciado de bornas Existen varios tipos de temporización pero tres son fundamentales:
a. Retardo a la conexión o retardo al trabajo: los contactos pasan de la posición de abierto a cerrado un tiempo después de la conexión de su órgano de mando.
b. Retardo a la desconexión: cuando los contactos pasan de cerrado a abierto transcurrido un tiempo de retardo.
c. Retardo a la conexión-desconexión: es una combinación de los dos tipos anteriores.

42
Módulo 6. Automatismos
Relés de mando El principio de funcionamiento de un relé de mando es idéntico al de un contactor desde el punto de vista de tipo de corriente, de alimentación, circuito magnético, etc. La principal diferencia que existe es el tamaño, ya que este relé realiza su función en el circuito de mando. Las intensidades que circulan por los contactos son menores. En el mercado existe una gran variedad de contactores auxiliares, su elección está en función del número de contactos necesarios, condiciones de empleo, adaptabilidad, tamaño, etc.
Simbología y referenciado. (El referenciado de bornes depende de los contactos NA y NC que tienen el relé y del número total del conjunto)
Relés de medida Un relé de medida es un aparato destinado a controlar las características de funcionamiento de los receptores. Los más utilizados son los relés de medida de tensión y los relés de medida de intensidad. El relé de medida de intensidad se utiliza cuando queremos controlar la carga de receptores e instalaciones. Existen de máxima o de mínima intensidad.
Simbología y referenciado El disparo del relé de máxima se produce por una sobreintensidad en máquinas con carga variable en caso de sobrecargas. El disparo del relé de mínima se produce por una disminución de la intensidad, es el caso de arrancadores automáticos por eliminación de resistencias, el relé controla el arranque progresivo con eliminación de resistencias rotóricas. En ambos casos el contacto auxiliar cerrado de relé forma parte del circuito de mando y es el que al abrirse en el disparo provoca la apertura del contactor dejando fuera de servicio la máquina o instalación.

43
MANTENIMIENTO INDUSTRIAL
El relé de medida de tensión se utiliza en circuitos donde interesa que la tensión de alimentación de receptores sea la misma para la que han sido fabricados (tensión de alimentación de motores, tensión de salida de generadores).
Simbología y referenciado La bobina del relé está alimentada con la tensión A1 A2, y el disparo se produce cuando cambia bruscamente el valor de las tensiones a controlar B1, B2, B3. 2.4.3. Fusibles Son dispositivos de protección, abren el circuito cuando la intensidad que lo atraviesa pasa de un determinado valor, como consecuencia de un cortocircuito o una sobrecarga muy elevada. Generalmente están formados por un cartucho en cuyo interior está el elemento fusible (hilo metálico calibrado) rodeado de algún material que actúa como medio de extinción, el cartucho se aloja en un soporte llamado portafusible que actúa como protector. En ocasiones forman parte o están asociados con otros elementos de mando y protección como seccionadores interruptores, etc.
Simbología
44
Módulo 6. Automatismos
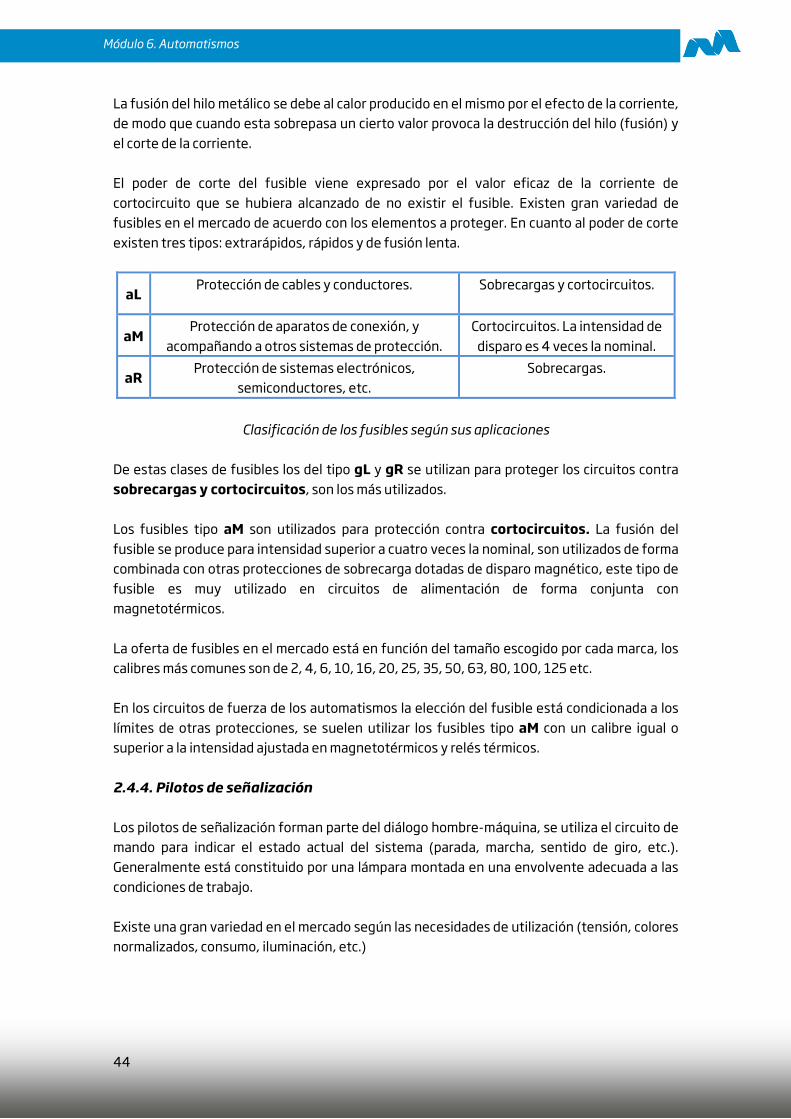
La fusión del hilo metálico se debe al calor producido en el mismo por el efecto de la corriente, de modo que cuando esta sobrepasa un cierto valor provoca la destrucción del hilo (fusión) y el corte de la corriente. El poder de corte del fusible viene expresado por el valor eficaz de la corriente de cortocircuito que se hubiera alcanzado de no existir el fusible. Existen gran variedad de fusibles en el mercado de acuerdo con los elementos a proteger. En cuanto al poder de corte existen tres tipos: extrarápidos, rápidos y de fusión lenta.
aL Protección de cables y conductores. Sobrecargas y cortocircuitos.
aM Protección de aparatos de conexión, y
acompañando a otros sistemas de protección. Cortocircuitos. La intensidad de
disparo es 4 veces la nominal.
aR Protección de sistemas electrónicos,
semiconductores, etc. Sobrecargas.
Clasificación de los fusibles según sus aplicaciones
De estas clases de fusibles los del tipo gL y gR se utilizan para proteger los circuitos contra sobrecargas y cortocircuitos, son los más utilizados. Los fusibles tipo aM son utilizados para protección contra cortocircuitos. La fusión del fusible se produce para intensidad superior a cuatro veces la nominal, son utilizados de forma combinada con otras protecciones de sobrecarga dotadas de disparo magnético, este tipo de fusible es muy utilizado en circuitos de alimentación de forma conjunta con magnetotérmicos. La oferta de fusibles en el mercado está en función del tamaño escogido por cada marca, los calibres más comunes son de 2, 4, 6, 10, 16, 20, 25, 35, 50, 63, 80, 100, 125 etc. En los circuitos de fuerza de los automatismos la elección del fusible está condicionada a los límites de otras protecciones, se suelen utilizar los fusibles tipo aM con un calibre igual o superior a la intensidad ajustada en magnetotérmicos y relés térmicos. 2.4.4. Pilotos de señalización Los pilotos de señalización forman parte del diálogo hombre-máquina, se utiliza el circuito de mando para indicar el estado actual del sistema (parada, marcha, sentido de giro, etc.). Generalmente está constituido por una lámpara montada en una envolvente adecuada a las condiciones de trabajo. Existe una gran variedad en el mercado según las necesidades de utilización (tensión, colores normalizados, consumo, iluminación, etc.)

45
MANTENIMIENTO INDUSTRIAL
Simbología y referenciado de bornes 2.4.5. Pulsadores Los pulsadores son elementos mecánicos de cierre y apertura. Un pulsador se activa actuando sobre él, pero volverá a su posición de reposo automáticamente cuando se elimine la acción que lo ha activado. Esto se debe a la energía se reposición acumulada que posee el pulsador y que generalmente es producida por un muelle. Son elementos que intervienen en el diálogo hombre-máquina. Cuando son activados mandan una señal al elemento de tratamiento de información. En el mercado se suministran de forma individual o en cajas con varios elementos. Las cajas, por su forma de instalación, pueden ser fijas o móviles. Por su constitución interna se suministran pulsadores con varios juegos de contactos de cierre y apertura.
Simbología y referenciado de bornes

46
Módulo 6. Automatismos
2.4.6. Finales de carrera Los finales de carrera (interruptores de posición) son pulsadores utilizados en el circuito de mando, accionados por elementos mecánicos. Normalmente son utilizados para controlar la posición de una máquina herramienta. Desde el punto de vista del circuito eléctrico están compuestos por un juego de contactos NA (normalmente abiertos) NC (normalmente cerrado) de forma que cuando son accionados cambian las condiciones del circuito.
Simbología y referenciado de bornes En la elección de un final de carrera se deben tener en cuenta:
Número de contactos necesarios. Condiciones de trabajo (seco, húmedo, materiales en suspensión, etc.) Esfuerzos mecánicos a los que será sometido. Número de maniobras por unidad de tiempo.
Los fabricantes suministran gran variedad de aparatos en los que dan información sobre las características y condiciones de trabajo de acuerdo con la normativa Europea EN. 2.4.7. Interruptores de control de nivel Los interruptores de nivel tienen cierta similitud con los finales de carrera, también controlan la posición de una máquina, en este caso de nivel de líquidos. Su utilización más frecuente es el control de electrobombas, provocando la puesta en marcha o parada según donde se encuentre el nivel del líquido, detectado por un juego de sondas. Este arranque o parada se realiza por medio de unos contactos que forman parte de la unidad de control, a la que también se conectan las sondas.

47
MANTENIMIENTO INDUSTRIAL
Simbología y referenciado de bornes
2.4.8. Termostatos Es un aparato destinado a influir en el circuito de mando para unos determinados valores de temperatura. Por medio de un dispositivo captador se cambia el estado de los contactos a partir de unos valores predeterminados de temperatura. En la elección de este aparato debemos tener en cuenta aspectos como el lugar de trabajo, entorno, margen de temperatura a controlar, fluido, etc.
Simbología y referenciado de bornes 2.4.9. Presostatos Los presostatos son aparatos destinados a controlar equipos hidráulicos o neumáticos entre varios valores de presión. El dispositivo de presión actúa sobre un juego de contactos que cambiarán las condiciones del circuito entre unos umbrales de presión.

48
Módulo 6. Automatismos
En la elección de este aparato debemos tener en cuenta aspectos como el lugar de trabajo, entorno, margen de presión a controlar, fluido, etc.
Simbología y referenciado de bornes 2.4.10. Detectores Los detectores son aparatos auxiliares que sustituyen en muchos sistemas a los finales de carrera, principalmente porque son estáticos, no sufriendo ningún tipo de desgaste mecánico como ocurre con los finales de carrera. Básicamente existen detectores inductivos, capacitivos y fotoeléctricos. Detectores capacitivos. Están basados en un circuito oscilante formado por un condensador y una resistencia. Cuando cualquier objeto, metálico o no, se acerca al condensador, se produce una variación de la capacidad de éste que provoca el accionamiento del circuito de disparo. Detectores inductivos. Están basados en un circuito oscilante formado por una bobina y un condensador. En este caso solamente la proximidad de objetos metálicos producen las oscilaciones necesarias para el accionamiento del circuito de disparo.
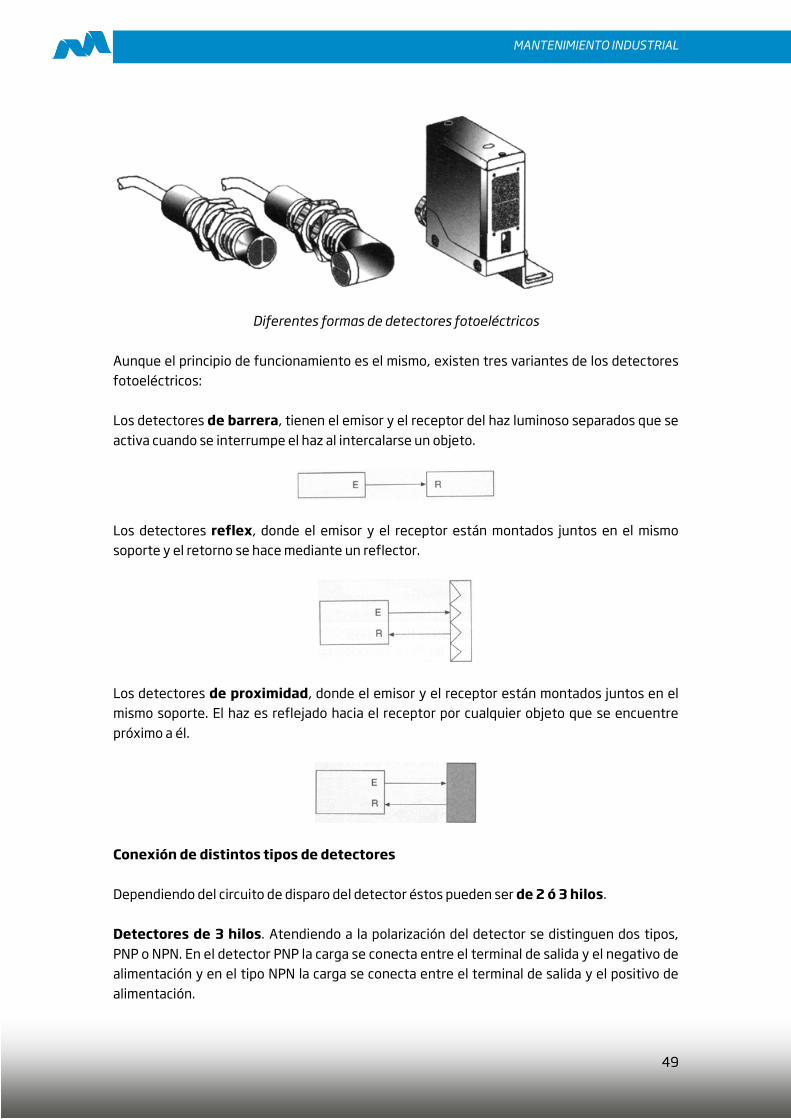
Diferentes formas de detectores inductivos y capacitivos Detectores fotoeléctricos. Basan su funcionamiento en la interrupción de una barrera luminosa generada por un emisor de luz, visible o infrarroja. Cuando el elemento receptor deja de recibir la radiación luminosa es activado el circuito de disparo.
49
MANTENIMIENTO INDUSTRIAL
Diferentes formas de detectores fotoeléctricos Aunque el principio de funcionamiento es el mismo, existen tres variantes de los detectores fotoeléctricos: Los detectores de barrera, tienen el emisor y el receptor del haz luminoso separados que se activa cuando se interrumpe el haz al intercalarse un objeto.
Los detectores reflex, donde el emisor y el receptor están montados juntos en el mismo soporte y el retorno se hace mediante un reflector.
Los detectores de proximidad, donde el emisor y el receptor están montados juntos en el mismo soporte. El haz es reflejado hacia el receptor por cualquier objeto que se encuentre próximo a él.
Conexión de distintos tipos de detectores Dependiendo del circuito de disparo del detector éstos pueden ser de 2 ó 3 hilos. Detectores de 3 hilos. Atendiendo a la polarización del detector se distinguen dos tipos, PNP o NPN. En el detector PNP la carga se conecta entre el terminal de salida y el negativo de alimentación y en el tipo NPN la carga se conecta entre el terminal de salida y el positivo de alimentación.

50
Módulo 6. Automatismos
Como dispositivos de carga pueden ser utilizados bobinas de contactores o relés de tensiones adecuadas a la alimentación.
Las tensiones habituales de este tipo de detectores son 24 y 48 V en corriente continua y 120/240 en corriente alterna. Aunque hoy en día ya se fabrican para poder conectar para tensiones de 24 a 240 V tanto en continua como en alterna. En cualquier caso, siempre se debe consultar catálogos y cuando se adquiere el detector, leer atentamente las instrucciones del fabricante para su conexión y cargas a las cuales se puede conectar. Detectores de 2 hilos. Se utilizan como captadores mecánicos convencionales: interruptores, pulsadores, etc. conectándose en serie con la carga a controlar. Los alimentados por corriente continua necesitan respetar la polaridad de la alimentación.
La tensiones habituales de este tipo de detectores son: 24 y 48V en corriente continua y 120/240V en corriente alterna. Algunos fabricantes poseen módulos amplificadores también llamados unidades de control, específicos que se encargan de alojar en un mismo soporte, la fuente de alimentación del detector y el dispositivo de disparo (generalmente un relé). Para su conexión es necesario estudiar la hoja de características que con éstos se adjunta. 2.4.11. Aparatos de funciones múltiples El grupo de aparatos múltiples está formado por combinaciones de aparatos trabajando conjuntamente en la alimentación de motores. La más frecuente es la asociación de disyuntor magnético, contactor y relé térmico también llamada guardamotor, se reúnen mediante estos tres productos, la protección contra cortocircuitos produciéndose el corte omnipolar por parte del disyuntor, la conexión de la carga a la línea por medio del contactor y la protección contra sobrecargas y contra falta de una fase por medio del relé térmico.

51
MANTENIMIENTO INDUSTRIAL
Simbología y referenciado
También existen en el mercado disyuntores magnetotérmicos que realizan la función de protección contra cortocircuitos (parte magnética) y contra sobreintensidades (parte térmica), en este caso se puede suprimir el relé térmico. En este tipo de asociaciones hay que tener especial cuidado en la elección de las características del contactor (poder de corte, poder de cierre, número de maniobras, etc.). Algunos fabricantes tienen a disposición de sus clientes tablas en las que en función de las características del motor que se va a emplear y del tipo de arranque, se indica el contactor, disyuntor, relé térmico, portafusibles, fusibles e incluso las secciones apropiadas para dicho motor. 2.4.12. Seccionadores Los seccionadores tanto en alta como en baja tensión, son aparatos destinados a dejar fuera de servicio parte de una línea o instalación. Aseguran en posición abierto una separación de contactos que cumplen las normas de seguridad. Los seccionadores pueden soportar las condiciones normales del circuito, pero sólo pueden conectar y desconectar un circuito en vacío (sin carga).
Simbología y referenciado

52
Módulo 6. Automatismos
2.4.13. Interruptores Los interruptores son aparatos de conexión-desconexión de mando mecánico que pueden abrir y cerrar un circuito en condiciones normales de carga. Existen combinaciones de los interruptores con otros aparatos, por ejemplo, los interruptores seccionadores tienen igual poder de corte que los interruptores y las mismas condiciones de apertura de contactos que los seccionadores. Los interruptores fusibles, reúnen en un mismo aparato el poder de corte en condiciones normales de carga de los interruptores y la protección de la instalación contra cortacircuitos de los fusibles.
Simbología y referenciado 3. Métodos gráficos para el diseño de automatismos 3.1. Introducción El más utilizado es el GRAFCET (gráfico de control etapa-transición). El Grafcet es una representación gráfica sencilla y de fácil lectura, del ciclo de funcionamiento de los sistemas secuenciales. El funcionamiento de un sistema secuencial se puede representar gráficamente por un conjunto de etapas, transiciones, uniones orientadas y etiquetas.

53
MANTENIMIENTO INDUSTRIAL
Etapa Una etapa refleja una situación del automatismo, en la que el comportamiento de todo o parte del automatismo no varía en relación a sus entradas y salidas.
Una etapa se representa por un cuadrado y un número en su interior, que indica el número de orden de la etapa dentro de grafcet. La etapa de comienzo se representa por trazos dobles. A cada etapa van asociadas unas acciones. Las acciones a realizar por la etapa se describen en el interior de un rectángulo o etiqueta colocado a la derecha del símbolo de etapa.
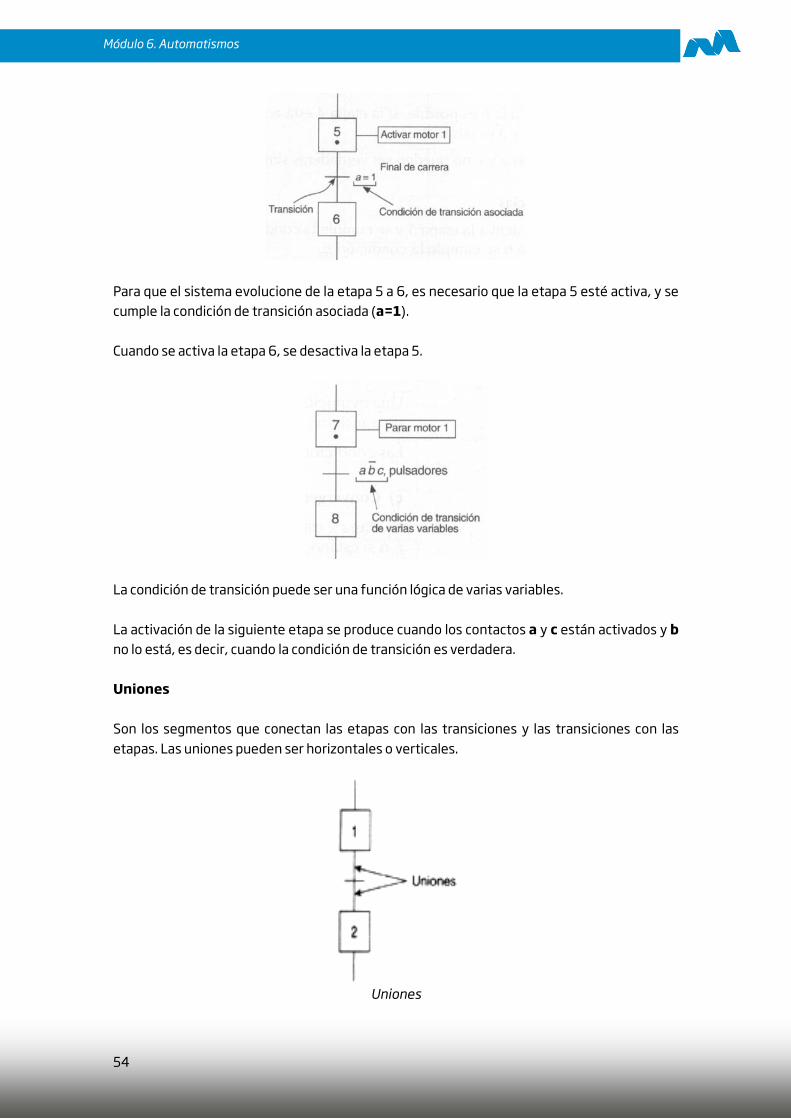
Una etapa puede estar activa o inactiva. Las acciones asociadas solamente son efectivas cuando la etapa está activa. Esta situación se representa gráficamente mediante un punto situado en la parte inferior del cuadrado. Indica que la etapa cinco está activa y también las acciones asociadas a ella, en este caso arrancar el motor 1. Transiciones Una transición representa la condición mediante la cual el control pasa a otra etapa. Simbólicamente se representa por una línea horizontal, situada sobre la línea de dirección. Cada transición lleva asociado una condición de transición, que puede ser una variable o una función lógica de varias variables. Para que el sistema evolucione de una etapa a otra es necesario que la condición de transición sea verdadera.
54
Módulo 6. Automatismos
Para que el sistema evolucione de la etapa 5 a 6, es necesario que la etapa 5 esté activa, y se cumple la condición de transición asociada (a=1). Cuando se activa la etapa 6, se desactiva la etapa 5.
La condición de transición puede ser una función lógica de varias variables. La activación de la siguiente etapa se produce cuando los contactos a y c están activados y b no lo está, es decir, cuando la condición de transición es verdadera. Uniones Son los segmentos que conectan las etapas con las transiciones y las transiciones con las etapas. Las uniones pueden ser horizontales o verticales.
Uniones

55
MANTENIMIENTO INDUSTRIAL
3.2. Reglas de evolución A continuación se describen las secuencias de evolución básicas: Secuencia única Está compuesta por un conjunto de etapas -transición en serie-. La evolución de una etapa a la siguiente sólo es posible si está activa la anterior y se cumple que la condición de transición es verdadera.
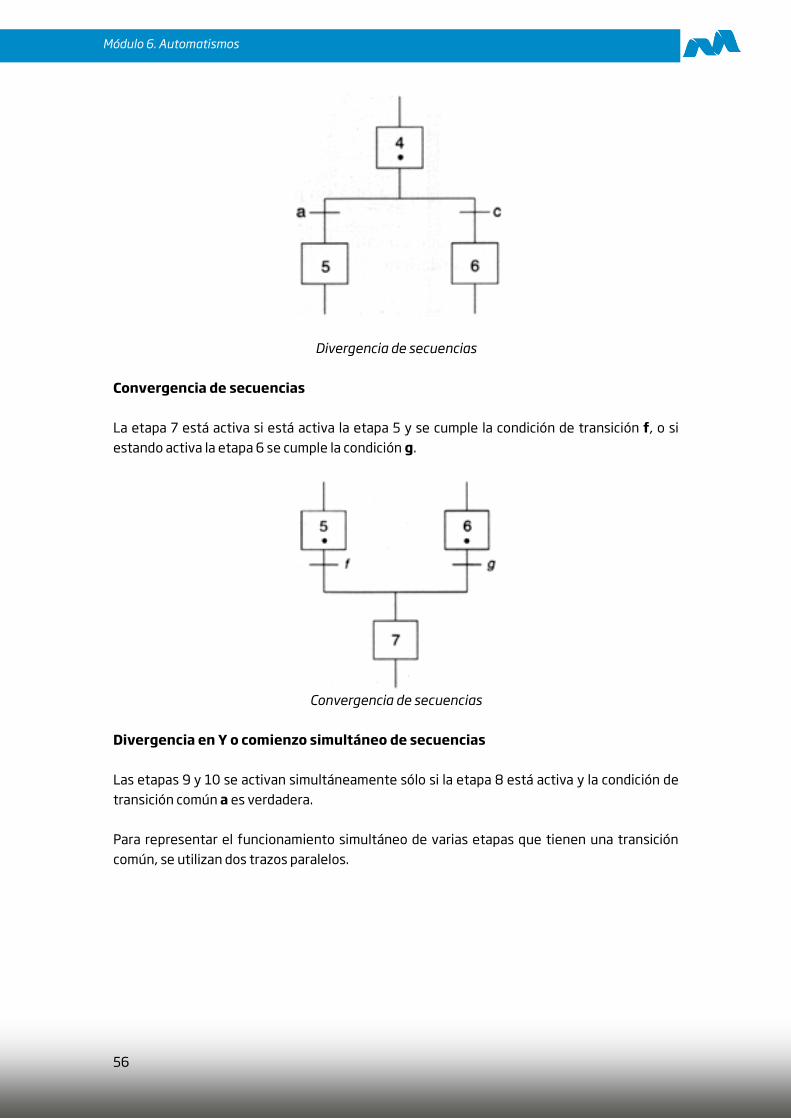
Secuencia única Divergencia de secuencias Existen dos posibilidades de evolución en función de la secuencia a realizar. Una evolución de la etapa 4 a la 5, solamente es posible si la etapa 4 está activada y la condición de transición a es verdadera. Una evolución de la etapa 4 a la 6 es posible, si la etapa 4 está activa y la condición de transición c es verdadera y a es falsa. Las condiciones de transición a y c no pueden ser verdaderas simultáneamente.
56
Módulo 6. Automatismos
Divergencia de secuencias Convergencia de secuencias La etapa 7 está activa si está activa la etapa 5 y se cumple la condición de transición f, o si estando activa la etapa 6 se cumple la condición g.
Convergencia de secuencias
Divergencia en Y o comienzo simultáneo de secuencias Las etapas 9 y 10 se activan simultáneamente sólo si la etapa 8 está activa y la condición de transición común a es verdadera. Para representar el funcionamiento simultáneo de varias etapas que tienen una transición común, se utilizan dos trazos paralelos.

57
MANTENIMIENTO INDUSTRIAL
Divergencia en Y
Convergencia de secuencias simultáneas
Convergencia en Y
La etapa 13 está activa solamente si están activas las etapas 11 y 12, y la condición de transición es verdadera. Salto de etapas El salto de etapas permite saltar de una etapa a otra sin pasar por otras intermedias siempre que se cumpla una condición. Salto condicional descendente: se produce un salto de la etapa 14 a la 17, si la condición de transición a es falsa y b es verdadera. Salto condicional ascendente: se produce un salto de la etapa 20 a la 19, si g es falsa y h es verdadero. Esta secuencia de salto se repetirá hasta que g sea verdadero.

58
Módulo 6. Automatismos
Salto condicional ascendente
Salto condicional descendente

59
MANTENIMIENTO INDUSTRIAL
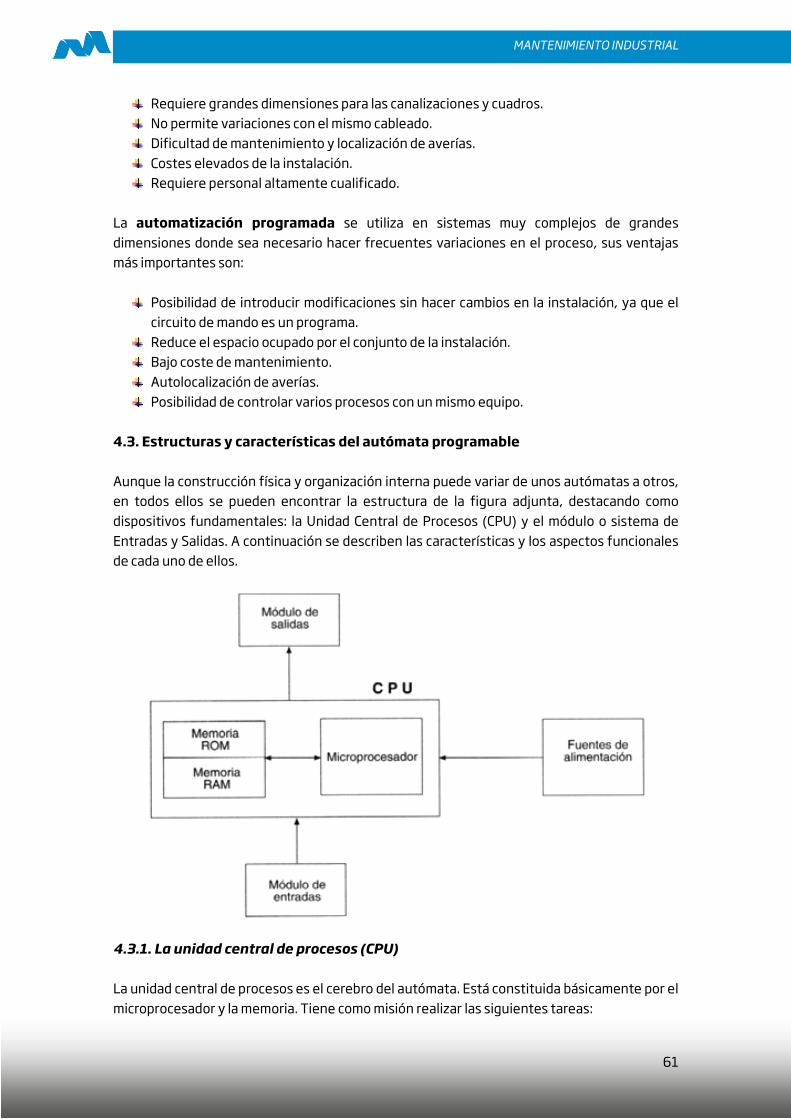
4. Estructura del autómata programable 4.1. El autómata programable Un autómata programable o P.L.C. (controlador lógico programable) es un equipo electrónico con capacidad de tratamiento de variables analógicas, informaciones digitales, numéricas y alfanuméricas. Diseñado para controlar en tiempo real procesos industriales automatizados. Básicamente está constituido por una unidad de control, memoria y los módulos de entrada y salida (E/S) encargados de establecer la comunicación del autómata con los circuitos externos. Los circuitos externos están constituidos por los captadores (detectores, pulsadores, finales de carrera, etc.) que mandan información desde el proceso industrial al autómata, y actuadores (relés, contactores, etc.) encargados de ejecutar las órdenes de programa.
Estructura de un autómata programable. 4.2. Evolución de sistemas cableados a sistemas programados Tradicionalmente el control de procesos industriales automatizados se basaba en la utilización de sistemas cableados, constituidos por un conjunto de aparatos eléctricos (contactores, relés, temporizadores y elementos auxiliares). Estos elementos estaban unidos físicamente por medio de cables formando el circuito de mando.

60
Módulo 6. Automatismos
Arrancador estrella-triángulo. Cableado. Posteriormente la maquinaria industrial ha sido dotada de mayores medios y mecanismos con los que el funcionamiento es menos dependiente del factor humano, más continuado y fiable. EI desarrollo de la electrónica y de la informática ha hecho posible la automatización programada. Se está introduciendo en las cadenas de producción, transformando la industria en cuanto a la disminución de costes, variedad de productos que pueden ser fabricados utilizando una misma cadena, etc.
Arrancador estrella-triángulo programado. La automatización cableada se ha utilizado y se sigue utilizando aunque en la actualidad queda relegada a instalaciones para controlar procesos poco complejos. Sus inconvenientes más relevantes son:
61
MANTENIMIENTO INDUSTRIAL
Requiere grandes dimensiones para las canalizaciones y cuadros. No permite variaciones con el mismo cableado. Dificultad de mantenimiento y localización de averías. Costes elevados de la instalación. Requiere personal altamente cualificado.
La automatización programada se utiliza en sistemas muy complejos de grandes dimensiones donde sea necesario hacer frecuentes variaciones en el proceso, sus ventajas más importantes son:
Posibilidad de introducir modificaciones sin hacer cambios en la instalación, ya que el circuito de mando es un programa.
Reduce el espacio ocupado por el conjunto de la instalación. Bajo coste de mantenimiento. Autolocalización de averías. Posibilidad de controlar varios procesos con un mismo equipo.
4.3. Estructuras y características del autómata programable Aunque la construcción física y organización interna puede variar de unos autómatas a otros, en todos ellos se pueden encontrar la estructura de la figura adjunta, destacando como dispositivos fundamentales: la Unidad Central de Procesos (CPU) y el módulo o sistema de Entradas y Salidas. A continuación se describen las características y los aspectos funcionales de cada uno de ellos.
4.3.1. La unidad central de procesos (CPU) La unidad central de procesos es el cerebro del autómata. Está constituida básicamente por el microprocesador y la memoria. Tiene como misión realizar las siguientes tareas:

62
Módulo 6. Automatismos
Procesar la información que recibe de los captadores (interruptores, pulsadores, finales de carrera, etc.) según el programa destinado a controlar el proceso.
Enviar la información adecuada a los actuadores (lámparas, bobinas de contactores, motores pequeños, etc.) a través del módulo de salidas.
Interpretar el repertorio de instrucciones y órdenes que le envía el programador por medio de la consola u ordenador de programación.
Realizar funciones de vigilancia, como lectura de estados internos (entradas y salidas) y actualización de indicadores.
Detectar posibles anomalías en el funcionamiento del equipo. El procesador va ejecutando las instrucciones del programa residente en la memoria de forma secuencial, es decir; instrucción tras instrucción, procediéndose a la actualización de estradas/salidas al final de la ejecución.
4.3.2. Memoria Su función es almacenar las instrucciones del programa, datos, estados internos y estados de entrada/salida. La memoria está organizada en zonas de trabajo según se muestra en la figura:
Organización de la memoria. Estructura interna de la memoria La organización interna de una memoria corresponde a la de la figura. Cada posición de memoria contiene un dato con un número determinado de bits, independientes entre sí, pero que comparten la misma dirección. El número de bits de cada posición de memoria suele ser de 8 bits. A un conjunto de 8 bits se le denomina Byte.

63
MANTENIMIENTO INDUSTRIAL
La capacidad de la memoria está determinada por el número de instrucciones que es capaz de almacenar. La unidad de capacidad de memoria es el «k» que equivale a 1024 posiciones de memoria. Tipos de memorias
Memorias RAM: (Randon Access Memory) memorias sobre las que sólo se puede leer y escribir. En ausencia de alimentación la información se volatiliza, desaparece. Si se necesita que la información permanezca hay que dotarla de una batería.
Memorias ROM: (Read Only Memory) son aquellas memorias que sólo pueden ser leídas, por lo que hay que grabar previamente los datos.
Según el método de programación o borrado surge la siguiente subdivisión de memorias ROM:
ROM: los datos se graban en la memoria durante un proceso de fabricación. PROM: programables por el usuario una sola vez. EPROM: El usuario puede grabar en ellos la información, ya que el proceso de
fabricación no es destructivo. Las memorias EPROM de fácil manejo e instalación, permiten a varios usuarios utilizar un mismo autómata para varios procesos personalizados. Permiten borrarlas sometiéndolas a la acción de los rayos ultravioleta. Todas estas operaciones se ejecutan, en los autómatas modernos, desde la consola de programación.
4.3.3. Fuente de alimentación Tiene como misión convertir la corriente alterna de red a corriente continua, para alimentarlos circuitos integrados y los componentes electrónicos del autómata, que normalmente trabaja a tensiones de 24V. de corriente continua. Cuando los captadores pasivos están próximos al autómata, pueden ser conectados directamente a la fuente de alimentación. Los de captadores de tipo activo también pueden ser alimentados por el propio autómata, pero siempre teniendo en cuenta la corriente que

64
Módulo 6. Automatismos
consume cada uno de ellos, para evitar una sobrecarga en la fuente de alimentación. En el caso de utilizar gran cantidad de captadores de este tipo, es necesaria una fuente de alimentación externa. 4.3.4. Entradas y salidas Está formado por un conjunto de módulos, estructuras de conexionado y soporte cuyas principales funciones son:
Adaptar la tensión de trabajo de los actuadores y captadores a los dispositivos electrónicos del autómata, que trabajan a diferentes tensiones.
Aislar eléctricamente los circuitos de mando y potencia. Módulo de entradas Este módulo tiene como misión recibir la información procedente del control de un proceso o una máquina. Esta información es procesada por la CPU, según el programa residente en la memoria. A este módulo se unen eléctricamente los captadores (interruptores, finales de carrera, pulsadores, sensores, detectores de posición, etc.). Dependiendo de los valores que son capaces de procesar, los módulos de entradas se pueden clasificar en dos tipos, digitales y analógicas.
Las entradas digitales varían su estado ante cambios de tensión todo o nada. Es decir el valor máximo o mínimo de la tensión de la alimentación. La alimentación de las entradas digitales se realiza atendiendo al tipo de autómata y a la aplicación que va destinado:
Entradas a 24 Vcc. Conectadas directamente de la fuente de alimentación del
autómata.
Conexión de captadores, activos y pasivos, a 24 Vcc
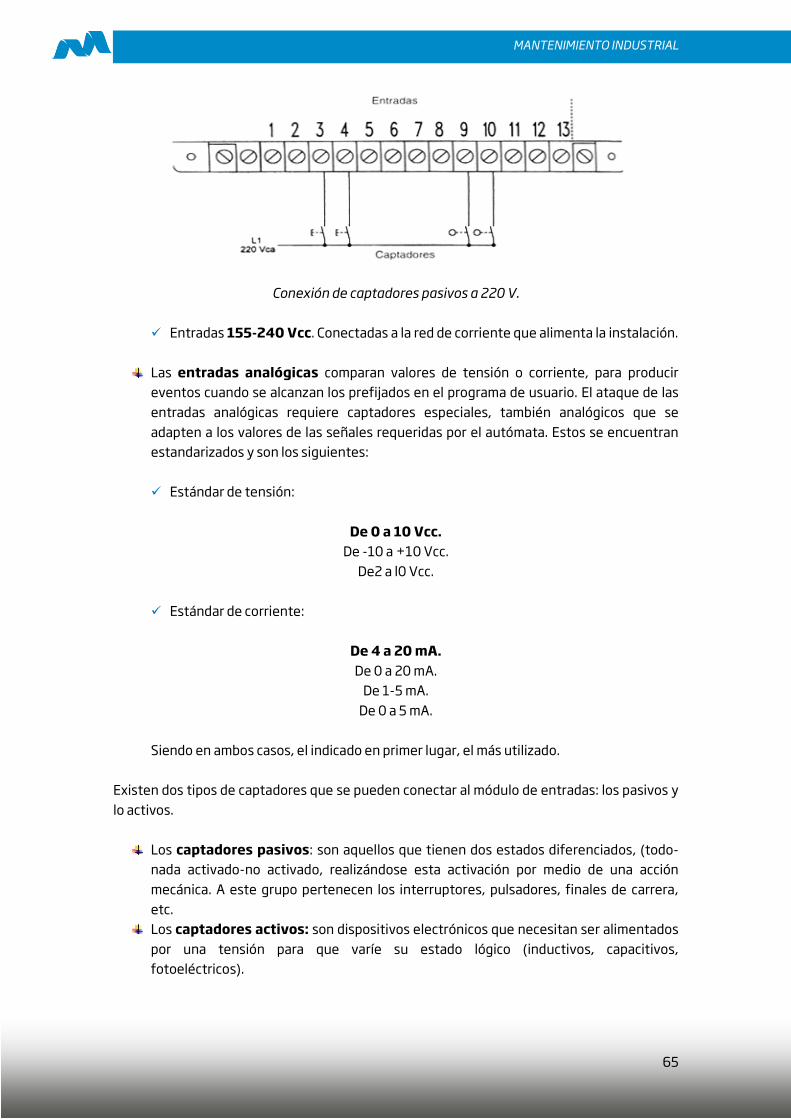
65
MANTENIMIENTO INDUSTRIAL
Conexión de captadores pasivos a 220 V.
Entradas 155-240 Vcc. Conectadas a la red de corriente que alimenta la instalación.
Las entradas analógicas comparan valores de tensión o corriente, para producir eventos cuando se alcanzan los prefijados en el programa de usuario. El ataque de las entradas analógicas requiere captadores especiales, también analógicos que se adapten a los valores de las señales requeridas por el autómata. Estos se encuentran estandarizados y son los siguientes:
Estándar de tensión:
De 0 a 10 Vcc.
De -10 a +10 Vcc. De2 a l0 Vcc.
Estándar de corriente:
De 4 a 20 mA. De 0 a 20 mA.
De 1-5 mA. De 0 a 5 mA.
Siendo en ambos casos, el indicado en primer lugar, el más utilizado.
Existen dos tipos de captadores que se pueden conectar al módulo de entradas: los pasivos y lo activos.
Los captadores pasivos: son aquellos que tienen dos estados diferenciados, (todo-nada activado-no activado, realizándose esta activación por medio de una acción mecánica. A este grupo pertenecen los interruptores, pulsadores, finales de carrera, etc.
Los captadores activos: son dispositivos electrónicos que necesitan ser alimentados por una tensión para que varíe su estado lógico (inductivos, capacitivos, fotoeléctricos).

66
Módulo 6. Automatismos
En los circuitos automatizados por autómatas, los captadores generalmente son abiertos, a diferencia de lo que ocurre en los automatismos realizados con contactores, que pueden utilizar como captadores contactos eléctricamente cerrados o eléctricamente abiertos.
En la figura de arriba se puede ver cómo el pulsador de parada S1, que en lógica cableada es normalmente cerrado, en la programada se utiliza normalmente abierto. Módulo de salidas Este módulo tiene como misión enviar las señales de activación y desactivación a los actuadores (bobinas de contactores, relés, triacs, lámparas, etc.). Una vez procesada según programa, la información enviada por las entradas a la CPU, el procesador genera las órdenes al módulo de salidas para que sean activadas ó desactivadas. A su vez estos cambios se transmiten a los actuadores Según el tipo de proceso a controlar por el autómata, podemos utilizar diferentes módulos de salidas. Existen dos tipos bien diferenciados, los digitales y los analógicos.
Los digitales envían señales todo o nada a los actuadores, pudiéndose distinguir los siguientes tipos: a relés, triac y a transistor.

67
MANTENIMIENTO INDUSTRIAL
Tipos de salidas Dependiendo del modelo y la alimentación del módulo de salida, la conexión de los actuadores se realiza de la siguiente forma:
Conexión de actuadores a las salidas.
Los analógicos adaptan la señal de salida, de acuerdo a los estándares antes indicados, sobre los actuadores, también analógicos, conectados a sus bornes. Para la unión entre los módulos analógicos y sus actuadores, es necesario utilizar un cable apantallado para evitar interferencias y perturbaciones en las señales enviadas. Esta precaución evitará el funcionamiento anómalo del Automatismo.

68
Módulo 6. Automatismos
Conexión de un módulo de salidas analógicas. En los grandes autómatas de tarjetas, es habitual utilizar los llamados Módulos de Tornillo o Bornes de Expansión, que se conectan con cables específicos del fabricante al módulo de entradas/salidas. Esto permite disminuir el cableado en los paneles de control, haciendo que el trabajo del instalador sea mucho más cómodo.
Módulos de expansión para unidades de E/S.
69
MANTENIMIENTO INDUSTRIAL
4.3.5. Aspectos externos del autómata Todo autómata programable presenta en su frontal una serie de indicadores y elementos de conexión, que deben ser conocidos por el instalador para su puesta en marcha y mantenimiento. Los elementos más característicos son los siguientes:
Bornes de alimentación: permiten la conexión de la tensión de alimentación necesaria para la puesta en marcha del autómata, 24 Vcc, 48 Vcc o 220 Vca.
En los equipos alimentados a 220 V es necesario conectar el conductor de protección PE (toma de tierra).
Bornes de E/S: los elementos de conexión para los captadores/actuadores se presentan generalmente en forma de borne. Para evitar errores de conexión se encuentran separados físicamente unos de otros.
Interface de conexión: es un slot, generalmente de tipo informático, que permite conectar el autómata a la consola de programación o a un PC para su programación.
Ranura de expansión: Permite aumentar las posibilidades de expansión del equipo con diferentes módulos de E/S o de red.
Indicadores LED: los LEDs están presentes en todos los frontales de los autómatas programables, y generalmente se utilizan para señalizar las siguientes acciones y situaciones de funcionamiento:
Captación de señales de entrada. Actuación de las salidas. Ejecución o parada del programa de usuario RUN/STOP. Errores de memoria. Errores de ejecución del programa. Batería baja. Defectos físicos del hardware del autómata En algunos casos el sistema de LEDs es sustituido por una pantalla LCD.
Alojamiento cartucho EEPROM: Permite conectar los cartuchos de memoria no
volátil. Conector batería: Aloja la pila de salvaguarda. Fuente de alimentación 24Vcc: Salida de tensión fija a 24Vcc para alimentar las
entrada y captadores de tipo activo. Interruptor RUN/STOP: Ejecuta o detiene el programa de usuario. Algunos modelos
de autómatas disponen de una posición central TERM (Terminal) que permite pasar a los modos RUN/STOP desde la consola de programación También es frecuente que este conmutador se presente como llave, de esta forma el programador puede retirarla en cualquier momento para evitar manipulaciones por personas no autorizadas.
Potenciómetros analógicos: Presentes en algunos modelos de autómatas, hacen posible la variación de valores de temporización y cómputo desde el exterior del equipo sin necesidad de modificar la programación.

70
Módulo 6. Automatismos
4.4. Equipos de programación y periféricos Los equipos de programación son los elementos que permiten la comunicación entre el usuario y el autómata. Las funciones principales de un equipo de programación son:
Introducir los programas en la memoria. Editar y modificar programas existentes en la memoria del autómata. Detectar anomalías en el formato de programación. Visualizar en tiempo real el estado de entradas y salidas.
En la actualidad los equipos de programación que se utilizan son las consolas programación y los ordenadores personales. Para conectar el autómata con el ordenador los fabricantes de autómatas han desarrollado interfaces de interconexión entre ellos, que permiten utilizar el ordenador como instrumento de programación Cada fabricante suministra consolas de programación. Están constituidas por un teclado, con el que se introducen las instrucciones del programa, y una pantalla de cristal líquido, que permite visualizar y presentar datos. Los periféricos son equipos con posibilidad de conexión al autómata o a la red de comunicación industrial. Su misión es facilitar la labor del usuario en tareas de grabación, presentación e impresión de datos. Los periféricos se pueden clasificar en dos grupos:
Genéricos, que tienen su aplicación en otros campos de la técnica y pueden ser impresoras, monitores, unidades de cinta, etc.
Específicos, que han sido creados exclusivamente para una función determinada en su conexión con el autómata y entre ellos se encuentran los visualizadores, paneles de operación cartuchos de memoria EEPROM.
4.4.1. Visualizadores y paneles de operación Estos dispositivos se utilizan para la comunicación hombre-máquina y tienen como misión, entre otras funciones:
Modificar parámetros del sistema. Obtener mensajes de alarmas. Visualización del estado del proceso. Forzar entradas/salidas. Etc.

71
MANTENIMIENTO INDUSTRIAL
Generalmente se utilizan en instalaciones que requieren continuos cambios de estado de las variables y un seguimiento constante del proceso, por operarios sin conocimientos de programación. Pueden ser de dos tipos:
Textuales, que presentan la información en una pantalla de cristal líquido con mensajes en modo texto. Generalmente se les denomina visualizadores. Su uso puede hacerse tanto en la industria, como en instalaciones automáticas de viviendas y edificios.
Textuales (SIEMENS)
Gráficos, que representan el proceso a controlar en una pantalla, también LCD, de forma gráfica. En algunos casos este tipo de pantalla es de tipo táctil, pudiéndose actuar directamente sobre los elementos que aparecen en ella. Este tipo de periférico recibe el nombre de Panel de Operación (OP).
Gráficos (SIEMENS) Se utilizan como puestos de supervisión de procesos industriales. El control de menús, mensajes y entrada de parámetros se realiza por un teclado tipo membrana, adaptado a todo tipo de ambientes industriales. Se conectan directamente al autómata o, en su caso, a una red de autómatas. En la figura se puede ver cómo un OP actúa de supervisor de una red de autómatas. En la actualidad se están utilizando ordenadores para tareas de visualización, supervisión y operación. En estos ha de estar previamente instalado un software especial denominado
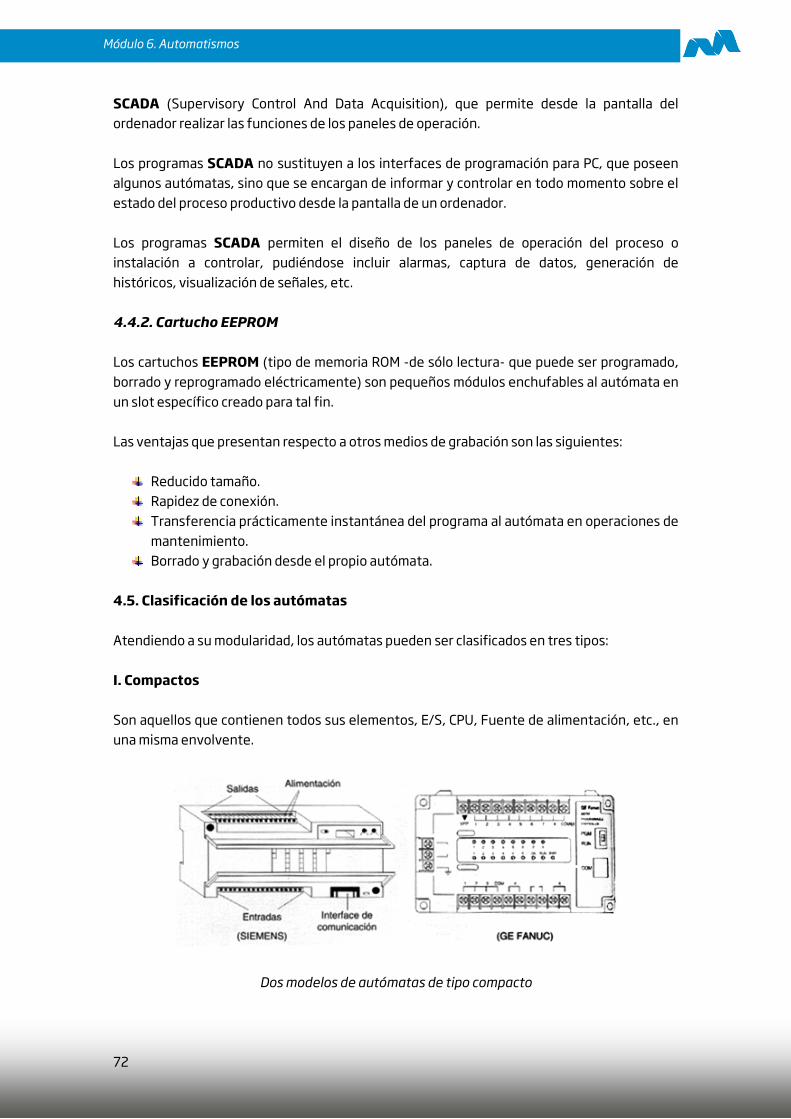
72
Módulo 6. Automatismos
SCADA (Supervisory Control And Data Acquisition), que permite desde la pantalla del ordenador realizar las funciones de los paneles de operación. Los programas SCADA no sustituyen a los interfaces de programación para PC, que poseen algunos autómatas, sino que se encargan de informar y controlar en todo momento sobre el estado del proceso productivo desde la pantalla de un ordenador. Los programas SCADA permiten el diseño de los paneles de operación del proceso o instalación a controlar, pudiéndose incluir alarmas, captura de datos, generación de históricos, visualización de señales, etc. 4.4.2. Cartucho EEPROM Los cartuchos EEPROM (tipo de memoria ROM -de sólo lectura- que puede ser programado, borrado y reprogramado eléctricamente) son pequeños módulos enchufables al autómata en un slot específico creado para tal fin. Las ventajas que presentan respecto a otros medios de grabación son las siguientes:
Reducido tamaño. Rapidez de conexión. Transferencia prácticamente instantánea del programa al autómata en operaciones de
mantenimiento. Borrado y grabación desde el propio autómata.
4.5. Clasificación de los autómatas Atendiendo a su modularidad, los autómatas pueden ser clasificados en tres tipos: I. Compactos Son aquellos que contienen todos sus elementos, E/S, CPU, Fuente de alimentación, etc., en una misma envolvente.
Dos modelos de autómatas de tipo compacto

73
MANTENIMIENTO INDUSTRIAL
Dentro de este grupo cabe destacar; la controladora programable que algunos fabricantes están desarrollando para aplicaciones domésticas y gestión de pequeña maquinaria. Con un teclado básico, 6 u 8 teclas situado directamente en su frontal, es posible realizar todas las tareas de programación y parametrización disponibles de una forma rápida y sencilla. Además presentan la posibilidad de ser conectadas, con el interface adecuado, a un ordenador personal para la edición, grabación e impresión de programas de usuario. II. Semicompactos Son aquellos en los que alguno de sus elementos está fuera de la envolvente principal. Por ejemplo la fuente de alimentación. III. Modulares Cada uno de los elementos que lo forman está en una envolvente diferente que se instala sobre un rack común. Las posibilidades de expansión son enormes comparándolas con las de tipo compacto y semicompacto, pero su coste es mucho más elevado.
Autómata programable de tarjetas de la firma SIEMENS.

74
Módulo 6. Automatismos
4.5.1. Posibilidades de expansión de un autómata programable A medida que el proceso a automatizar gana en complejidad, el número de entradas y salida necesarias, tanto analógicas como digitales, también aumenta proporcionalmente. Esto implica un aumento de módulos conectados al autómata o, en su caso, uno de mayor potencia. La mayoría de los autómatas programables permiten su interconexión con los denominados módulos de expansión. Estos son elementos, generalmente de entradas/salidas, que aumentan las posibilidades de comunicación con los actuadores y captadores del sistema. En los autómatas compactos y semicompactos, esta expansión es bastante limitada (de 3 a 8 módulos), sin embargo en los autómatas modulares aumenta considerablemente. La interconexión entre todos los elementos se realiza por cables o elementos de bus específicos, diseñados por el fabricante. En la figura se muestra cómo un autómata de tipo modular puede ampliar sus prestaciones.
Autómata modular de la firma SIEMENS. Cuando la distancia entre los elementos de un sistema automático, es muy grande, la expansión por módulos no es operativa, debiéndose utilizar en estos casos, un sistema de comunicación industrial tipo bus. 4.6. Jerarquía de la automatización industrial Todos los elementos que intervienen en un proceso productivo, están interconectados entre sí siguiendo un sistema jerárquico de forma triangular.

75
MANTENIMIENTO INDUSTRIAL
De esta forma una red industrial está formada por cuatro niveles: Nivel 0 Corresponde al nivel más bajo del automatismo y en él se encuentran los sensores y captadores. La información es tratada en forma de bit. Nivel 1 Es el denominado nivel de campo. Está formado por los automatismos específicos de cada una de las máquinas controladas por autómatas programables. La información es tratada en forma de byte. Nivel 2 También llamado nivel de célula. Está formado por uno o varios autómatas modulares de gran potencia que se encargan de gestionar los diferentes automatismos de campo. La comunicación se realiza en forma de «paquetes de información». Nivel 3 Es el nivel más alto del sistema automático. Está formado por un ordenador tipo Workstation que se encarga de la gestión total de la producción de fábrica.
Sistema jerárquico de la automatización industrial La unión entre los diferentes niveles se realiza con las denominadas redes de comunicación industrial. A medida que el nivel del automatismo es superior, la informática

76
Módulo 6. Automatismos
se hace más presente que la automática; por este motivo aquí se describirán brevemente los buses de comunicación utilizados para procesar la información de los niveles más bajos. 4.6.1. Buses de comunicación industrial Un bus es un sistema de interconexión que permite comunicar varios dispositivos entre sí, con un número de hilos muy reducido. Desde hace mucho tiempo los fabricantes de autómatas han venido desarrollando redes de tipo local para la conexión de sus autómatas y elementos para la regulación y control. El principal problema que se ha dado hasta el momento ha sido que cada uno de ellos ha creado un estándar propio no compatible con los demás. Esta problemática se ha solucionado en gran medida con los grupos de desarrollo, formados por los propios fabricantes, para confeccionar sistemas de comunicación universales, de forma que cualquier dispositivo de red pueda comunicarse con otro, aunque no sean de la misma firma comercial. Entre los sistemas de bus utilizados en la industria, dos destacan por su amplia implantación, el PROFIBUS y el bus AS-i, que serán los aquí estudiados. 4.6.1.1. PROFIBUS El PROFIBUS (Proces Field Bus) es una red universal de altas prestaciones desarrollada para la automatización industrial. Permite comunicar dispositivos electrónicos (autómatas, variadores de velocidad, etc.) independientemente de quién los haya fabricado. Se caracteriza por trabajar en modo maestro-esclavo, donde el maestro es un autómata programable encargado de inicializar la red, y recibir los datos de los módulos de E/S de los diferentes esclavos para procesarlos. Una red PROFIBUS puede estar formada por varios maestros con sus respectivos esclavos. El número máximo de elementos participantes es de 127. Su interconexión se puede realizar por un par trenzado tipo apantallado o por un cable de fibra óptica, cuya longitud máxima es de 10 Km para el primero y 100 Km para el segundo. La topología de la red puede ser en estrella, línea, árbol o anillo. Existen tres versiones diferentes de la familia Profibus, todas ellas compatibles entre sí:
Profibus-DP: utilizada en aplicaciones de campo. Profibus-FMS: de aplicación en el nivel de célula. Profibus-PA: para la conexión de actuadores/sensores en áreas de seguridad.
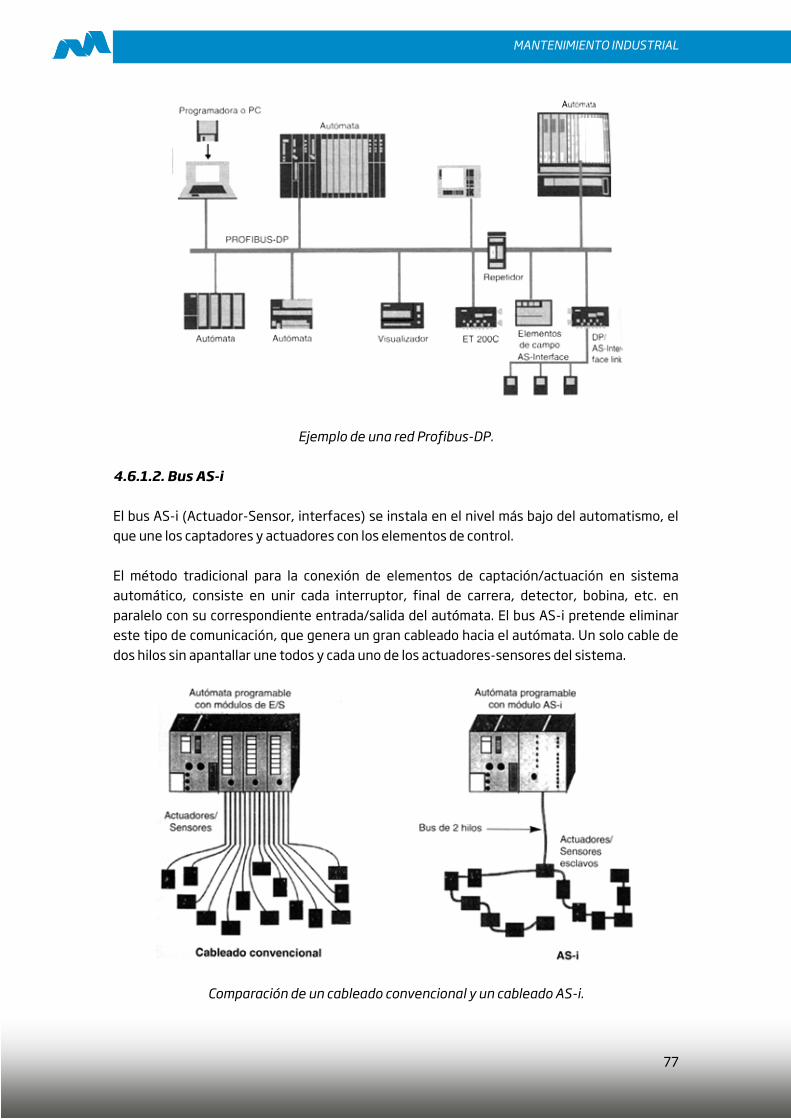
77
MANTENIMIENTO INDUSTRIAL
Ejemplo de una red Profibus-DP. 4.6.1.2. Bus AS-i El bus AS-i (Actuador-Sensor, interfaces) se instala en el nivel más bajo del automatismo, el que une los captadores y actuadores con los elementos de control. El método tradicional para la conexión de elementos de captación/actuación en sistema automático, consiste en unir cada interruptor, final de carrera, detector, bobina, etc. en paralelo con su correspondiente entrada/salida del autómata. El bus AS-i pretende eliminar este tipo de comunicación, que genera un gran cableado hacia el autómata. Un solo cable de dos hilos sin apantallar une todos y cada uno de los actuadores-sensores del sistema.
Comparación de un cableado convencional y un cableado AS-i.

78
Módulo 6. Automatismos
El acceso a la red utiliza el método maestro-esclavo, siendo el maestro un autómata y los esclavos los diferentes módulos de usuario. Elementos del Bus AS-i El cable: Está formado por dos hilos sin apantallar. Es de tipo plano y su funda dispone de un sistema de seguridad para evitar errores de polaridad. La conexión a los diferentes elementos se realiza por dos cuchillas de penetración que se insertan en el conductor. Cuando es desconectado, el aislante se regenera por si solo evitando contactos indirectos.
Módulo AS-i esclavo: Los módulos AS-i están formados por dos partes, el módulo de acoplamiento y el módulo de usuario. Módulo de acoplamiento: Es de tipo pasivo. Se encarga de recibir el cable del bus y repartirlo a diferentes ramas. Está provisto de una tapa que, además de servir de protección al módulo, permite conectar otras secciones del bus. Módulo de usuario: De tipo activo. Es el interface encargado de comunicar los actuadores y sensores convencionales con la red. El módulo de usuario se fija sobre el módulo de acoplamiento de la misma forma que su tapa. Por lo general los módulos son bidireccionales y pueden procesar 4 señales de entrada y 4 de salida. La red admite un total de 248 señales binarias. Módulos maestros: En una red As-i solamente puede haber un maestro, que es el encargado de gestionar las señales de los esclavos. Los maestros pueden ser módulos autónomos específicamente diseñados para tal fin. Autómatas programables a los que se les ha añadido un módulo AS-i o tarjetas adaptadoras para el bus, instaladas en un PC. Para la correcta gestión de las direcciones de los esclavos por el programa de usuario, es necesario consultar el manual de programación que facilita el fabricante. Fuente de alimentación: Es la encargada de alimentar los diferentes esclavos conectados al bus a una tensión de 24 Vcc.

79
MANTENIMIENTO INDUSTRIAL
El propio cable (bus) que es utilizado para la comunicación entre los elementos de la red, es utilizado como soporte para su alimentación. La fuente de alimentación estará dimensionada adecuadamente, para disipar la potencia consumida por todos lo dispositivos que alimenta.
Dos formas de conexión de la fuente de alimentación en una red AS-i Programadora de direcciones: Permite programar el direccionamiento de los diferentes esclavos que intervienen en una red AS-i. Suele ser de tipo portátil y se conecta directamente al cable del bus. Posee una pequeña pantalla de cristal líquido (LCD) para visualizar los mensajes y direcciones, y un teclado para la programación. Una vez realizado el direccionamiento, puede separarse del bus. Cada esclavo posee su dirección y no puede ser repetida. Las direcciones se salvaguardan en una memoria tipo EEPROM en cada uno de los módulos de usuario, de esta forma no se pierden ante cortes de la alimentación. Pasarelas (Gateway): Son conversores de protocolos que permiten comunicar el bus AS-i con redes de niveles superiores, en la jerarquía de la automatización; por ejemplo AS-i ↔ Profibus.
Conversión de protocolos Profibus-ASi

80
Módulo 6. Automatismos
Los fabricantes poseen diferentes modelos de pasarelas para la interconexión con todo tipo de redes industriales, Modbus, CAN, Suconnet, etc. Sensores/Actuadores: Aunque los módulos de usuario permiten conectar actuadores/sensores de tipo convencional, cada vez son más las firmas comerciales que fabrican estos elementos específicos conectables directamente al bus: detectores, válvulas neumáticas, arrancadores de motor, lámparas de señalización, teclados, etc. Estructura de la red AS-i El bus AS-i se estructura en forma de estrella, línea, rama o árbol. La longitud máxima del cable no debe pasar de los 100m. Cuando existan diferentes ramificaciones, se sumarán las longitudes de cada una de ellas para obtener el límite permitido.
Tipología de una red AS-i Un repetidor permite aumentar en 100 m la longitud del cable, siendo posible conectar dos repetidores en serie en una misma rama. Pueden instalarse varios repetidores en diferentes ramales conectados en paralelo. EI número máximo de participantes (esclavos) de una red AS-i es de 31. Las ampliaciones se pueden realizar en cualquier punto del cable. En la figura siguiente se muestra un ejemplo de una red AS-i:

81
MANTENIMIENTO INDUSTRIAL
Red AS-i
5. Programación de autómatas 5.1. Introducción Los primeros autómatas programables surgieron para sustituir los enormes cuadros a relés y contactores que gobernaban los procesos industriales complejos. El instalador–mantenedor se vio obligado a comunicarse con los nuevos equipos en un lenguaje que no le era familiar. Esto supuso que los primeros lenguajes de programación se concibieran pensando en los esquemas a relés utilizados por los técnicos electricistas, donde la simbología gráfica y sus conexiones fueron sustituidas por códigos nemotécnicos. Actualmente los lenguajes simbólicos utilizados para la programación de autómatas se desarrollan siguiendo este criterio inicial, añadiéndoles nuevas funciones que nada tienen que ver con los circuitos de lógica cableada. El principal problema que han planteado los lenguajes de programación ha sido la incompatibilidad entre los modelos de diferentes fabricantes, e incluso dentro de los de una misma marca. Esto ha supuesto que los programadores deban conocer el mayor número de lenguajes posibles para abarcar un amplio mercado de trabajo. En 1993 el Comité Electrotécnico Internacional hizo el primer intento serio de estandarizar los lenguajes de
82
Módulo 6. Automatismos
programación creando la norma ICE 1131-3, que define la sintaxis, forma y estructura de los lenguajes de programación con independencia del fabricante. 5.2. Lenguajes de programación El lenguaje de programación es el encargado de manejar el juego de instrucciones del autómata para realizar las funciones lógicas y de cálculo de la CPU. La norma UNE-EN 611131-3 (que concuerda con la IEC 1131-3) define 4 lenguajes de programación para autómatas, 2 en formato texto y 2 en formato gráfico, pudiendo ser combinables y complementarios entre sí. Algunos fabricantes no cumplen al completo la norma IEC 1131-3 y utilizan su propia nemotecnia, como ocurre con la serie Simatic S7 de Siemens. Debido a la gran implantación que estos autómatas tienen en la industria, se ha considerado necesario estudiar su lenguaje S7-microwin en este tema como complemento a la norma. Antes de ver cómo se utilizan los diferentes lenguajes de programación, se hace necesario el estudio del direccionamiento de las entradas y salidas en un autómata. 5.2.1. Direccionamiento de variables Una variable es un elemento del programa que puede cambiar de estado. Por ejemplo: un contacto puede tener 2 posiciones abierto o cerrado, una bobina puede estar activada o desactivada. Las variables se asocian a las entradas y salidas del autómata y es necesario etiquetarlas para que el programa pueda procesar las señales que éstas generan o reciben. El direccionamiento de las variables de entradas y salidas consiste en identificar físicamente los diferentes elementos que componen un módulo en el autómata programable, es decir indicar el borne de conexión en el que está conectado el captador o el actuador. Según la norma IEC 1131-3 los identificadores son:
I - Para las entradas Q - Para las salidas
Conociendo el tipo de variable a programar y el lugar que ocupa el autómata obtendremos el Operando, que como veremos más adelante, es necesario para elaborar cualquier programa de autómatas. El operando tiene la siguiente estructura:
% X M.N

83
MANTENIMIENTO INDUSTRIAL
Donde:
% → Indica que es una variable. X → Identifica si la variable es de entrada o de salida. M → Es el módulo al que pertenece dicha variable (byte). N → Lugar que ocupa en el módulo.
Por ejemplo: % I 1.2 indica que es la variable (%) de entrada (I) número 2 situada en el módulo número 1 del autómata. % Q 2.0 indica que es la variable de salida número 0 situada en el módulo número 2.
Según Simatic S7 los identificadores son:
E- Para la entradas A- Para las salidas
El operando tiene la siguiente estructura:
X M.N
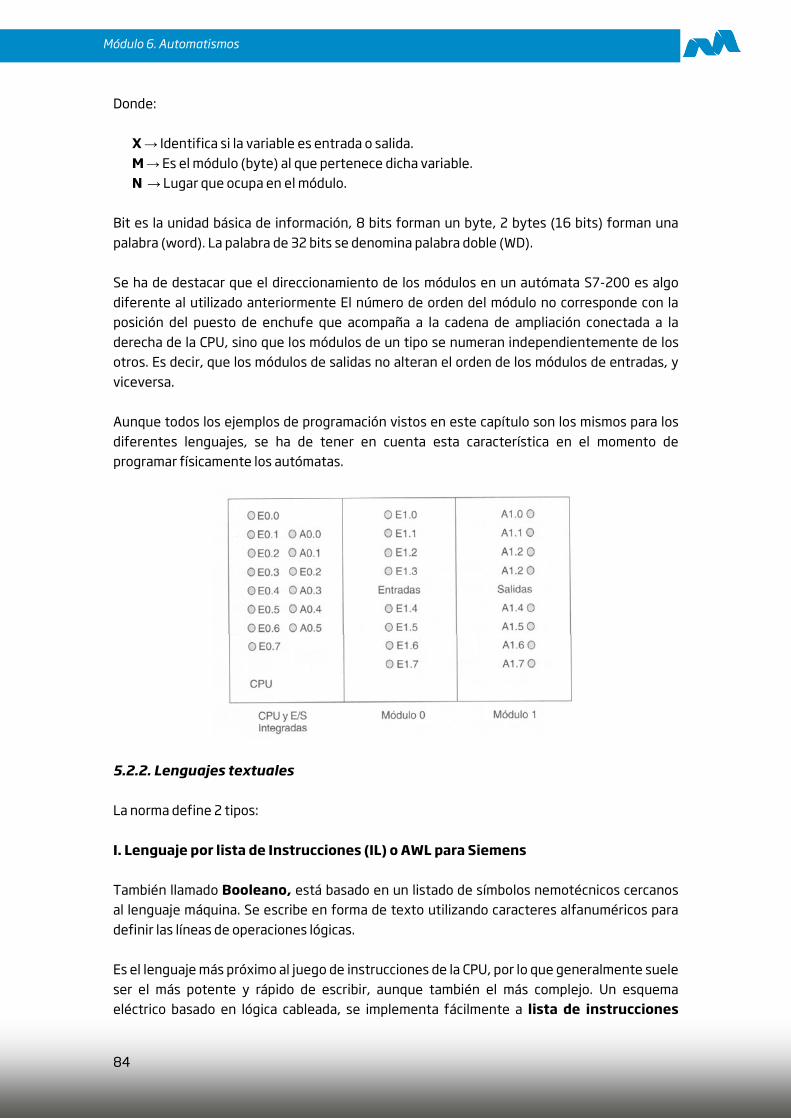
84
Módulo 6. Automatismos
Donde:
X → Identifica si la variable es entrada o salida. M → Es el módulo (byte) al que pertenece dicha variable. N → Lugar que ocupa en el módulo.
Bit es la unidad básica de información, 8 bits forman un byte, 2 bytes (16 bits) forman una palabra (word). La palabra de 32 bits se denomina palabra doble (WD). Se ha de destacar que el direccionamiento de los módulos en un autómata S7-200 es algo diferente al utilizado anteriormente El número de orden del módulo no corresponde con la posición del puesto de enchufe que acompaña a la cadena de ampliación conectada a la derecha de la CPU, sino que los módulos de un tipo se numeran independientemente de los otros. Es decir, que los módulos de salidas no alteran el orden de los módulos de entradas, y viceversa. Aunque todos los ejemplos de programación vistos en este capítulo son los mismos para los diferentes lenguajes, se ha de tener en cuenta esta característica en el momento de programar físicamente los autómatas.
5.2.2. Lenguajes textuales La norma define 2 tipos: I. Lenguaje por lista de Instrucciones (IL) o AWL para Siemens También llamado Booleano, está basado en un listado de símbolos nemotécnicos cercanos al lenguaje máquina. Se escribe en forma de texto utilizando caracteres alfanuméricos para definir las líneas de operaciones lógicas. Es el lenguaje más próximo al juego de instrucciones de la CPU, por lo que generalmente suele ser el más potente y rápido de escribir, aunque también el más complejo. Un esquema eléctrico basado en lógica cableada, se implementa fácilmente a lista de instrucciones
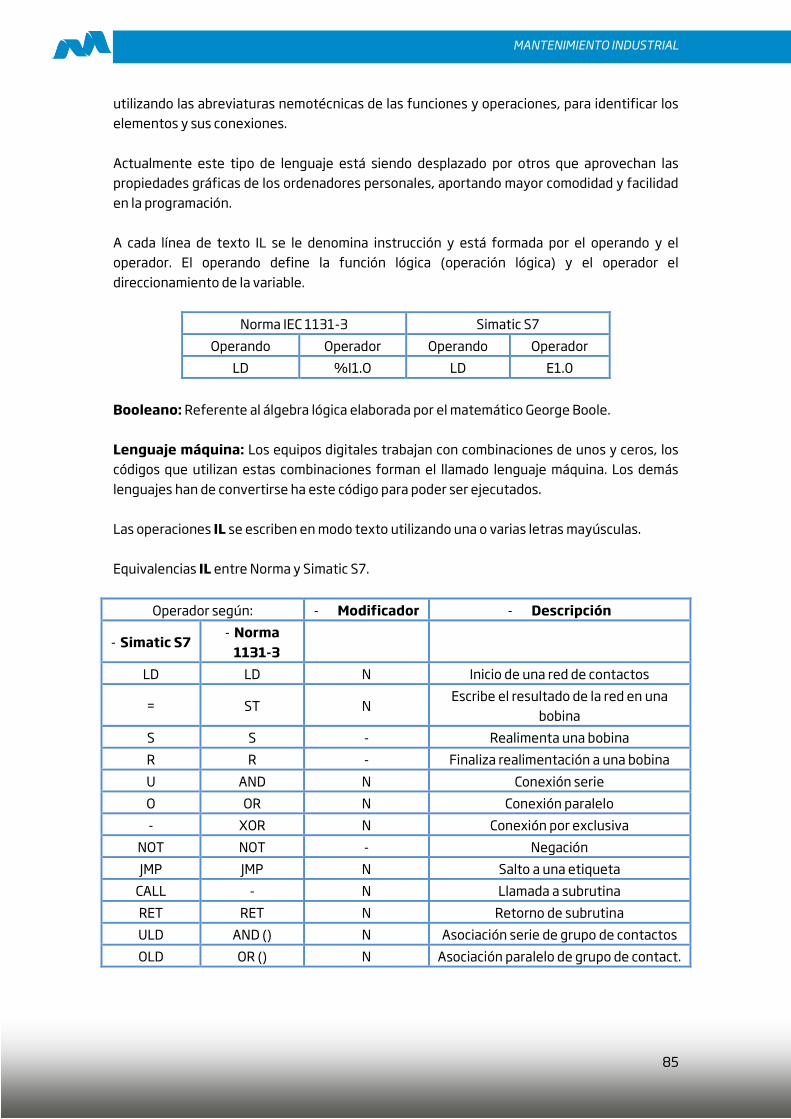
85
MANTENIMIENTO INDUSTRIAL
utilizando las abreviaturas nemotécnicas de las funciones y operaciones, para identificar los elementos y sus conexiones. Actualmente este tipo de lenguaje está siendo desplazado por otros que aprovechan las propiedades gráficas de los ordenadores personales, aportando mayor comodidad y facilidad en la programación. A cada línea de texto IL se le denomina instrucción y está formada por el operando y el operador. El operando define la función lógica (operación lógica) y el operador el direccionamiento de la variable.
Norma IEC 1131-3 Simatic S7 Operando Operador Operando Operador
LD %I1.O LD E1.0 Booleano: Referente al álgebra lógica elaborada por el matemático George Boole. Lenguaje máquina: Los equipos digitales trabajan con combinaciones de unos y ceros, los códigos que utilizan estas combinaciones forman el llamado lenguaje máquina. Los demás lenguajes han de convertirse ha este código para poder ser ejecutados. Las operaciones IL se escriben en modo texto utilizando una o varias letras mayúsculas. Equivalencias IL entre Norma y Simatic S7.
Operador según: - Modificador - Descripción
- Simatic S7 - Norma
1131-3
LD LD N Inicio de una red de contactos
= ST N Escribe el resultado de la red en una
bobina S S - Realimenta una bobina R R - Finaliza realimentación a una bobina U AND N Conexión serie O OR N Conexión paralelo - XOR N Conexión por exclusiva
NOT NOT - Negación JMP JMP N Salto a una etiqueta
CALL - N Llamada a subrutina RET RET N Retorno de subrutina ULD AND () N Asociación serie de grupo de contactos OLD OR () N Asociación paralelo de grupo de contact.

86
Módulo 6. Automatismos
El lenguaje IL permite integrar opcionalmente comentarios en el programa con carácter informativo. Se pueden insertar a la derecha de cada instrucción, al principio de un programa o antes de una red de contactos. Según la norma IEC 1131-3 se escriben entre paréntesis y asteriscos. Por ejemplo: (* Comentario *). Con la nemotecnia Simatic S7 se escribe después de dos barras inclinadas //. Por ejemplo: //Comentario. En el siguiente programa se muestran comentarios al principio del programa, y en cada línea de instrucción:
Norma IEC1131-1 Simatic S7 %L1: (*Interruptores en serie*) NETWORK 1 //Interruptores en serie
LD %I1.0 (*Interruptor 1*) LD E1.1 //Interruptor 1 AND %l1 2 (*Interruptor 2*) U E1.2 //Interruptor 2 AND %l1 3 (*Interruptor 3*) U E1.3 //interruptor 3
ST %Q2.l (*Lámpara *) = A2.l //Lámpara El software S7-Microwin permite elegir la nemotecnia empleada en la programación activando el modo Simatic» o el «Internacional». De esta forma los identificadores de los operandos y operadores se aproximan a la norma. II. Lenguaje de texto estructurado (ST) Tiene su origen en los lenguajes de alto nivel como Basic, C ó Pascal, siendo su programación similar a estos. La utilización del ST se sale de los objetivos de este tema, por lo tanto no será tratado. 5.2.3. Lenguajes gráficos Lenguaje gráfico de contactos (LD) o KOP para Siemens La nemotecnia es gráfica, utilizando símbolos que recuerdan los empleados en los esquemas de circuitos eléctricos a relés, por lo tanto la transcripción es mucho más sencilla que por lista de instrucciones. No todos los autómatas aceptan este modo de programación, sobre todo los más antiguos, debido a que necesitan un terminal de programación específico o bien un software gráfico instalado en un ordenador.

87
MANTENIMIENTO INDUSTRIAL
El abaratamiento de los equipos informáticos está favoreciendo el empleo de la programación gráfica. Nemotecnia gráfica. Se aplica tanto en la transcripción de los esquemas eléctricos cableados a lista de instrucciones, como en la elaboración de programas en lenguaje gráfico. Nemotecnia: Conjunto de símbolos que generan una memoria artificial. Su utilización es similar a la usada en circuitos de automatismos con relés. Los símbolos básicos son:
Los símbolos especiales representan operadores con funciones específicas. Algunas de estas pueden presentar grandes diferencias entre diferentes modelos de autómatas. Los bloques para funciones especiales se representan con un rectángulo en cuyo interior se indican con símbolos alfanuméricos las diferentes operaciones que pueden realizar.
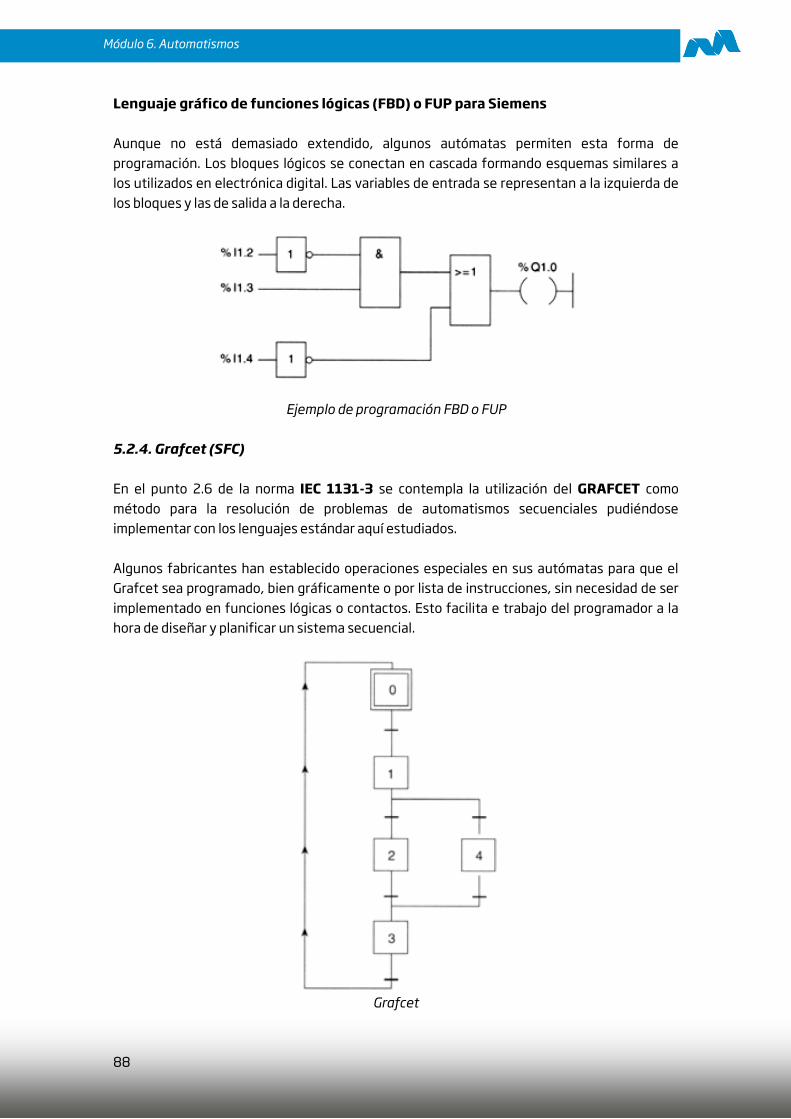
88
Módulo 6. Automatismos
Lenguaje gráfico de funciones lógicas (FBD) o FUP para Siemens Aunque no está demasiado extendido, algunos autómatas permiten esta forma de programación. Los bloques lógicos se conectan en cascada formando esquemas similares a los utilizados en electrónica digital. Las variables de entrada se representan a la izquierda de los bloques y las de salida a la derecha.
Ejemplo de programación FBD o FUP 5.2.4. Grafcet (SFC) En el punto 2.6 de la norma IEC 1131-3 se contempla la utilización del GRAFCET como método para la resolución de problemas de automatismos secuenciales pudiéndose implementar con los lenguajes estándar aquí estudiados. Algunos fabricantes han establecido operaciones especiales en sus autómatas para que el Grafcet sea programado, bien gráficamente o por lista de instrucciones, sin necesidad de ser implementado en funciones lógicas o contactos. Esto facilita e trabajo del programador a la hora de diseñar y planificar un sistema secuencial.
Grafcet

89
MANTENIMIENTO INDUSTRIAL
5.3. Tipos de programación Atendiendo a la estructura del programa, se pueden establecer dos tipos de programación: Programación lineal Consta de una sola rutina, llamada programa principal, que es ejecutada línea a línea de forma cíclica. Es ideal para pequeños automatismos donde el grado de complejidad es bajo. Algunas operaciones avanzadas de la programación lineal son los llamados Saltos. Estos permiten omitir una parte del programa que no es necesario ejecutar cuando se cumple una determinada condición, reduciendo el tiempo de ejecución del ciclo. El tiempo de ejecución de cada instrucción está determinado por el modelo de autómata y el tipo de operación, siendo habitual su medida en µs.
Programación lineal Programación estructurada Es el tipo aconsejado para automatismos con tareas complejas. Consiste en seccionar el programa en diferentes rutinas y subrutinas clasificadas de la siguiente forma:
Programa principal. Está formado por el núcleo de la aplicación. En él se establecen los saltos a las diferentes subrutinas.
Subrutinas. Son pequeños programas, con identidad propia, que son llamados desde el programa principal tantas veces como necesiten ejecutarse. Desde las subrutinas de primer nivel se pueden hacer llamadas a otras subrutinas de niveles diferentes, formando lo que se llama programa de estructura anidada. Las limitaciones referentes a la profundidad del anidado vienen dadas por las características técnicas del autómata.

90
Módulo 6. Automatismos
Subrutinas 5.4. Representación de esquemas Los esquemas empleados en la elaboración de programas para autómatas son similares, en lo básico, a los utilizados en los circuitos eléctricos con relés y contactores. Por lo tanto antes de comenzar a programar es necesario realizar el esquema sobre el papel con la nemotecnia normalizada, para posteriormente escribir el programa en cualquiera de los lenguajes vistos anteriormente.
Dos ejemplos de esquemas eléctricos transformados en esquemas para autómatas
Reglas para la elaboración de esquemas Para representar esquemas se han de seguir unas reglas básicas de diseño que facilitarán la elaboración del programa Todos los esquemas comienzan cargando un contacto desde el extremo superior izquierdo. La unión entre elementos se realiza con conexiones verticales y horizontales.

91
MANTENIMIENTO INDUSTRIAL
La representación se realiza de izquierda a derecha y de arriba abajo, respetando el sentido de la ecuación lógica que lo define.
Todas las bobinas terminan la red a la derecha del esquema. No está permitido insertar contactos después de estas, ya que el autómata no los acepta.
Las acciones sobre una bobina o un grupo de bobinas se seccionan en redes de contactos (también llamados segmentos o Networks). Cada red de contactos puede integrar opcionalmente una etiqueta identificativa y un comentario.

92
Módulo 6. Automatismos
5.5. Representación de esquemas Entradas Detectan el estado de los captadores conectados a las entradas del autómata. Se representan como contactos abiertos o cerrados. LAS ENTRADAS DIGITALES PUEDEN TENER DOS ESTADOS, <<1>> PARA LA TENSIÓN
MÁXIMA DE LA ALIMENTACIÓN Y <<0>> PARA LA TENSIÓN MÍNIMA Nemotecnia:
Símbolo Identificador del operando Norma IEC 1131-3 Simatic S7
I - E
Salidas Se encargan de activar los actuadores desde el módulo de salidas del autómata. Su representación gráfica se realiza por el símbolo de la bobina pudiendo ser directa o negada. Nemotecnia:
Símbolo Identificador del operando Norma IEC 1131-3 Simatic S7
Q A
Las salidas pueden tener contactos asociados que se abren o se cierran cuando la bobina está activada. Memorias internas También llamadas marcas o bits internos. Tienen un comportamiento similar al de los relés auxiliares en la lógica cableada.

93
MANTENIMIENTO INDUSTRIAL
Su representación gráfica se realiza con el símbolo de la bobina, tanto en forma directa como negada. Nemotecnia:
Símbolo Identificador del operando Norma IEC 1131-3 Simatic S7
M M
A las memorias internas se les asocian contactos, abiertos y cerrados, que cambian de estado cuando se activan.
LOS TRES ASTERISCOS (***) REPRESENTADOS EN LOS SÍMBOLOS NEMOTÉCNICOS, INDICAN EL LUGAR DONDE SE ESCRIBE EL IDENTIFICADOR DE LA VARIABLE
Temporizador Los temporizadores generan eventos cuando alcanzan un valor de tiempo predeterminado. Su comportamiento es similar a los utilizados en la lógica cableada. Nemotecnia:
Símbolo Identificador del operando
Norma IEC 1131-3 Simatic S7
TM T
A los temporizadores se les asocian contactos abiertos y cerrados, que cambian de estado cuando se alcanza el valor de tiempo máximo. Contador Los contadores originan eventos cuando alcanzan un determinado número de sucesos

94
Módulo 6. Automatismos
Nemotecnia:
Símbolo Identificador del operando
- Norma IEC 1131-3 Simatic S7
C Z
A los contadores se les asocian contactos abiertos y cerrados que cambian de estado cuando se alcanza el valor máximo de sucesos.
LAS LIMITACIONES RELACIONADAS CON EL NÚMERO DE CONTADORES Y TEMPORIZADORES DE LOS AUTÓMATAS VIENEN DADAS POR LAS CARACTERÍSTICAS
TÉCNICAS DE ESTOS 5.6. Programación de operaciones En este capítulo se estudian las operaciones básicas que realiza un autómata. Todos los ejemplos serán implementados en lista de instrucciones IL (AWL), lenguaje de contactos LD (KOP) y funciones lógicas FBD (FUP), utilizando la nemotecnia internacional (según la Norma ICE 1131-3) y la de los autómatas Simatic S7 de Siemens. 5.6.1. Operación de carga Recibe este nombre la operación encargada de iniciar una red de contactos o un segmento del programa. Si la operación de carga se realiza de forma directa, con un contacto abierto, la instrucción es LD, si lo hace de forma negada, con un contacto cerrado, se escribe LDN. Nemotecnia:
Lenguaje LD(KOP) Lenguaje IL (AWL) Descripción Norma IEC 1131-3 Simatic S7 Carga directa LD LD
Carga negada LDN LDN
TODA RED DE CONTACTOS COMIENZA CON UNA O VARIAS OPERACIONES DE CARGA
LAS REDES DE CONTACTOS TAMBIÉN SON DENOMINADOS <<SEGMENTOS>> O <<NETWORS>>

95
MANTENIMIENTO INDUSTRIAL
Ejemplos de programación: Operación de carga directa asociada a la entrada 3 del módulo 1 del autómata:
Operación de carga negada asociada a la entrada 5 del módulo 3 del autómata:
5.6.2. Operación de escritura Recibe este nombre la operación encargada de escribir el resultado de una red de contactos en una bobina. La escritura directa se representa por ST y la negada por STN. Si la escritura se realiza sobre una bobina de enganche se representa por S y si lo hace sobre una de desenganche por R. Nemotecnia:
Lenguaje LD(KOP) Lenguaje IL (AWL)
Descripción Norma IEC
1131-3 Simatic S7
Escritura directa ST = Escritura negada STN
Escritura con enganche S S Escritura con desenganche R T
Ejemplos de programación:
Escritura directa sobre la salida 1 del módulo 2

96
Módulo 6. Automatismos
Escritura negada sobre la salida 1 del módulo 2
Escritura con enganche y desenganche de la salida 4 del módulo 3
5.6.3. Operaciones combinacionales Son las que definen las diferentes conexiones entre contactos de un programa. Conexión AND Tiene su correspondencia con el circuito eléctrico combinacional de contactos en serie. El resultado de la operación solamente se escribe en la bobina cuando los operadores de entrada <<no negados>> se encuentran a <<1>> y los negados a <<0>>. Por ejemplo: la función lógica de una operación AND con 3 operadores no negados es S = A • B • C
Operando en IL (AWL):
Descripción Norma IEC 1131-3 Simatic S7 Conexión serie directa AND U Conexión serie negada ANDN UN

97
MANTENIMIENTO INDUSTRIAL
Conexión OR Tiene su correspondencia con el circuito eléctrico combinacional de contactos en paralelo. El resultado de la operación se escribe en la bobina cuando cualquiera de los operadores <<no negados>> está a <<1>> o cualquiera de los negados está a <<0>>. La operación lógica de una operación OR con tres operadores no negados es: S = A + B + C
Operandos en IL (AWL):
Descripción Norma IEC 1131-3 Simatic S7 Conexión paralelo directa OR O Conexión paralelo negada ORN ON
Agrupaciones de contactos Los contactos pueden operar entre sí creando bloques que, a su vez, operan con otros bloques en serie o en paralelo originando agrupaciones de contactos. Para programar estas agrupaciones la norma IEC 1131-3 establece la utilización de paréntesis y el lenguaje S7 opera con bloques previamente cargados con LD. Agrupación AND () Conecta grupos de contactos con la función serie (AND). En la figura se muestra un bloque de dos contactos en operación OR que, a su vez, están en serie con el contacto inicial. Las instrucciones escritas entre paréntesis representan la conexión en paralelo de los dos contactos. La operación AND que precede a los paréntesis indica que este grupo está conectado en serie con los operadores precedentes, en este caso con el contacto %I1.1
Agrupación de bloques de contactos en serie

98
Módulo 6. Automatismos
Agrupación OR () Opera grupos de contactos con la función paralelo (OR). La figura muestra la agrupación de 2 bloques de contactos conectados en paralelo. Cada bloque está compuesto de 2 contactos conectados en serie.
Agrupación de contactos en paralelo
Negación (NOT) La operación NOT invierte el valor de la operación lógica escrita previamente a ella. El resultado de negar una operación de contactos con NOT, es similar a negar una operación
de variables de una ecuación lógica: cba ++ . La nemotecnia empleada para esta operación es:
Lenguaje LD(KOP) Lenguaje IL (AWL) Descripción Norma IEC 1131-3 Simatic S7
Negación NOT NOT Esta operación no está asociada a ningún operando. Flanco positivo También llamado frente montante, detecta el paso de 0 a 1 del operador asociado. Por ejemplo un pulsador asociado a una operación de flanco positivo solamente generará la señal <<1>> en el instante de ser pulsado, pasando a la situación <<0>> inmediatamente, aunque continúe la acción sobre el pulsador.
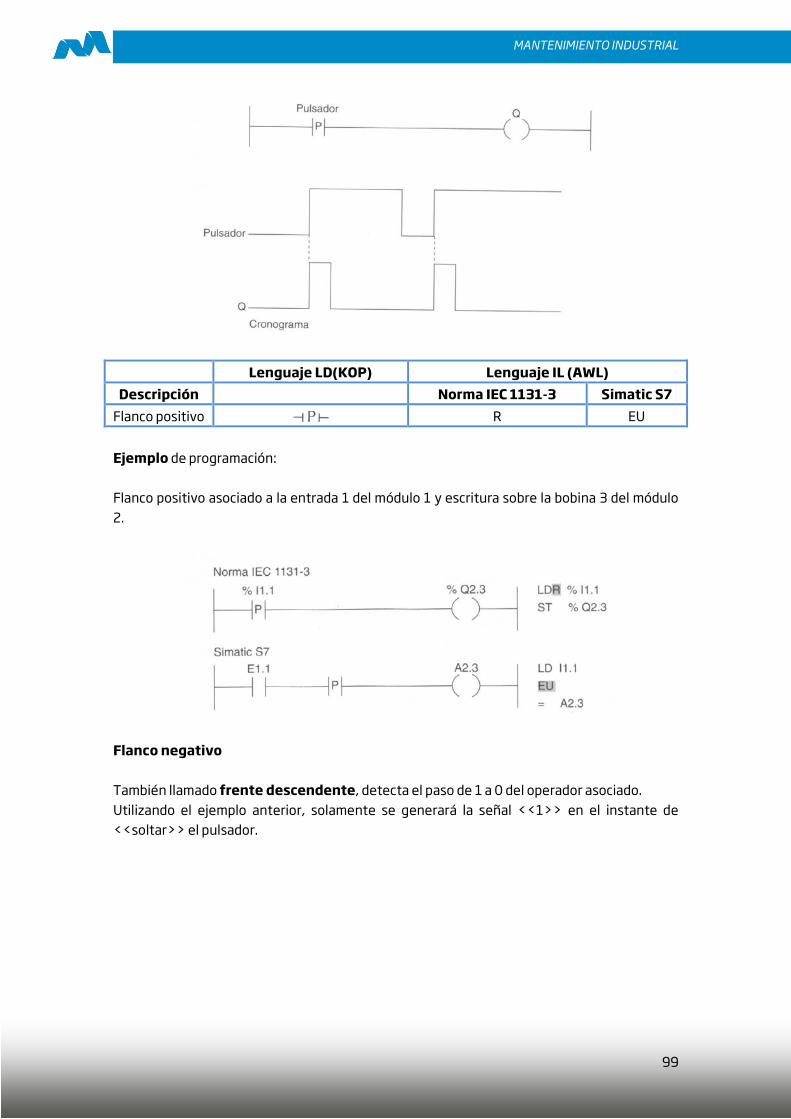
99
MANTENIMIENTO INDUSTRIAL
Lenguaje LD(KOP) Lenguaje IL (AWL) Descripción Norma IEC 1131-3 Simatic S7
Flanco positivo R EU Ejemplo de programación: Flanco positivo asociado a la entrada 1 del módulo 1 y escritura sobre la bobina 3 del módulo 2.
Flanco negativo También llamado frente descendente, detecta el paso de 1 a 0 del operador asociado. Utilizando el ejemplo anterior, solamente se generará la señal <<1>> en el instante de <<soltar>> el pulsador.

100
Módulo 6. Automatismos
Lenguaje LD(KOP) Lenguaje IL (AWL) Descripción Norma IEC 1131-3 Simatic S7
Flanco negativo F ED Ejemplo de programación: Flanco negativo asociado a la entrada 1 del módulo 1 y escritura sobre la bobina 3 del módulo 2.
5.6.4. Operaciones de memoria (realimentación) Una función de memoria es aquella que genera un evento, y lo mantiene aunque cese la acción inicial que lo originó. Enclavamiento por contacto En la lógica cableada esta operación la realiza el circuito llamado <<arranque con pulsadores de marcha y paro>>, donde el pulsador de marcha es el que origina el evento que alimenta la bobina, el contacto en paralelo el que la autoalimenta y el pulsador de parada el que la desacativa.

101
MANTENIMIENTO INDUSTRIAL
Realimentación en lógica cableada. Su implementación en lenguaje LD es:
Realimentación en LD. Como el contacto en paralelo al pulsador de marcha pertenece a la bobina, su direccionamiento será el mismo, es decir %Q2.1 (A2.1 en S7). Programa en IL:
Norma IEC 1131-3 Simatic S7 LD %I1.1 OR %Q2.1
ANDN %I1.2 ST %Q2.1
LD E1.1 O A2.1 UN E1.2 = A2.1

102
Módulo 6. Automatismos
Enclavamiento con bobinas de enganche y desenganche La misma operación de memoria se puede programar utilizando las bobinas de enganche –S- y desenganche –R – descritas anteriormente. Al escribir sobre la bobina S, el operando asociado se pone a <<1>> y se mantiene hasta que se realiza la escritura sobre la bobina R, que lo pone a <<0>>.
En lenguaje FBD (FUP), las bobinas de enganche/desenganche se representan en un solo bloque denominado biestable.
Programa en IL:
Norma IEC 1131-3 Simatic S7 %1 (*Red de contactos 1*)
LD %I1.1 S %Q2.1
%2 (*Red de contactos 2*) LD %I1.2 R %Q2.1
NETWORK 1 //Segmento 1 LD E1.1 S A2.1
NETWORK 2 //Segmento 2 LD E1.2 R A2.1
Si las dos bobinas asociadas a una misma variable, son asignadas a la vez, los autómatas dan preferencia a una de ellas, generalmente a la que está escrita en una dirección de programa más avanzada.

103
MANTENIMIENTO INDUSTRIAL
5.6.5. Operaciones con memorias internas (marcas) Como ya se ha comentado anteriormente, las marcas o memorias internas son semejantes a los relés auxiliares utilizados en la lógica cableada. Las operaciones de carga, escritura y combinacionales, son idénticas a las utilizadas para las salidas. Algunos modelos de autómatas permiten aplicar marcas a los bloques de funciones especiales, como temporizadores y contactores. Las marcas se identifican con la letra M tanto en la norma IEC 1131-3 como en Simatic S7.
Bobina asociada a memoria. Contactos asociados a memorias. Direccionamiento El número de marcas internas que puede procesar un autómata depende de su capacidad de memoria. Por lo general suele ser lo suficiente elevada como para programar cualquier automatismo complejo. El direccionamiento puede variar, dependiendo del tipo de autómata. Algunos lo realizan simplemente añadiendo el número a su letra identificativa M. Por ejemplo M12 es la dirección de la marca número 12. M255 es la dirección de la marca número 255. Y otros como los S7 de Siemens, añaden 2 números: el primero indica el Byte y el segundo el número de bit del 0 al 7. Por lo tanto una marca expresada de esta forma será: M2.3 En el siguiente ejemplo de programación se puede ver cómo la entrada %I1.1 pone a <<1>> la marca %M3 y sus dos contactos asociados escriben, uno de forma directa y otro negado, sobre las salidas %Q2.1 y Q2.2 respectivamente.

104
Módulo 6. Automatismos
Remanencia Se denomina de esta forma al mantenimiento del valor de la marca ante un corte de alimentación en el autómata. Es decir, si una marca es remanente y ha sido puesta a <<1>> por una operación lógica, en el caso de que se de un corte en el sector, cuando se rearme la alimentación, la marca continuará a <<1>>. Pero si no es remanente, la marca se queda a <<0>>. El número de marcas remanentes dependerá de las características técnicas del autómata. Por lo tanto, se hace necesario consultar el manual del equipo para conocer este dato. En algunos casos, el software de programación permite al usuario las direcciones de remanencia. LA REMANENCIA PUEDE ESTAR TAMBIÉN ASOCIADA A TEMPORIZADORES Y CONTADORES 5.6.6. Operaciones de tiempo Los temporizadores son los encargados de realizar estas operaciones. Se utilizan de forma similar a los empleados en lógica cableada, cuando es habilitada la entrada del temporizador y alcanza su valor máximo, sus contactos asociados cambian de estado originando eventos en la red sobre la que están situados.

105
MANTENIMIENTO INDUSTRIAL
Direccionamiento de temporizadores El operando de un temporizador se completa con una letra o letras identificadoras, seguidas del número de orden que hace en el autómata.
Norma IEC 1131-3 Simatic S7 TM T
Por ejemplo: %TM10 según la norma y T10 en Simatic S7. Tipos de temporizadores Varias son las operaciones que se pueden realizar con los temporizadores, aunque no todas están integradas en la totalidad de los autómatas. Esto hace necesario consultar el manual de usuario para conocer los tipos de temporización de que dispone el equipo a programar. Operaciones de tiempo:
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Temporizador con retardo a la conexión
TON TON Temporizador con retardo a la desconexión TOF
Temporizador con retardo a la conexión con memoria
TP TONR
En entrada PT se escribe el tiempo a programar.
Cronogramas de los diferentes tipos de temporizadores

106
Módulo 6. Automatismos
Uso de los temporizadores La forma de representar los temporizadores en los esquemas puede realizarse de dos formas:
a. El bloque de función en una red diferente a la de sus contactos asociados.
b. II. El bloque de función en cascada con la asignación de bobinas.
5.6.7. Operaciones de cómputo. Reciben esta denominación las funciones encargadas de contar/descontar sucesos, originados por contactos o grupos de contactos sobre un operando llamado contador. Cuando es alcanzado un valor máximo se genera un evento que puede ser operado en una red de contactos. Direccionamiento de contadores El operando de un contador se completa con una letra identificadora seguida por el número de orden que hace en el autómata.
Norma IEC 1131-3 Simatic S7 C Z
Por ejemplo: %C10 según la norma y Z10 en Simatic S7.
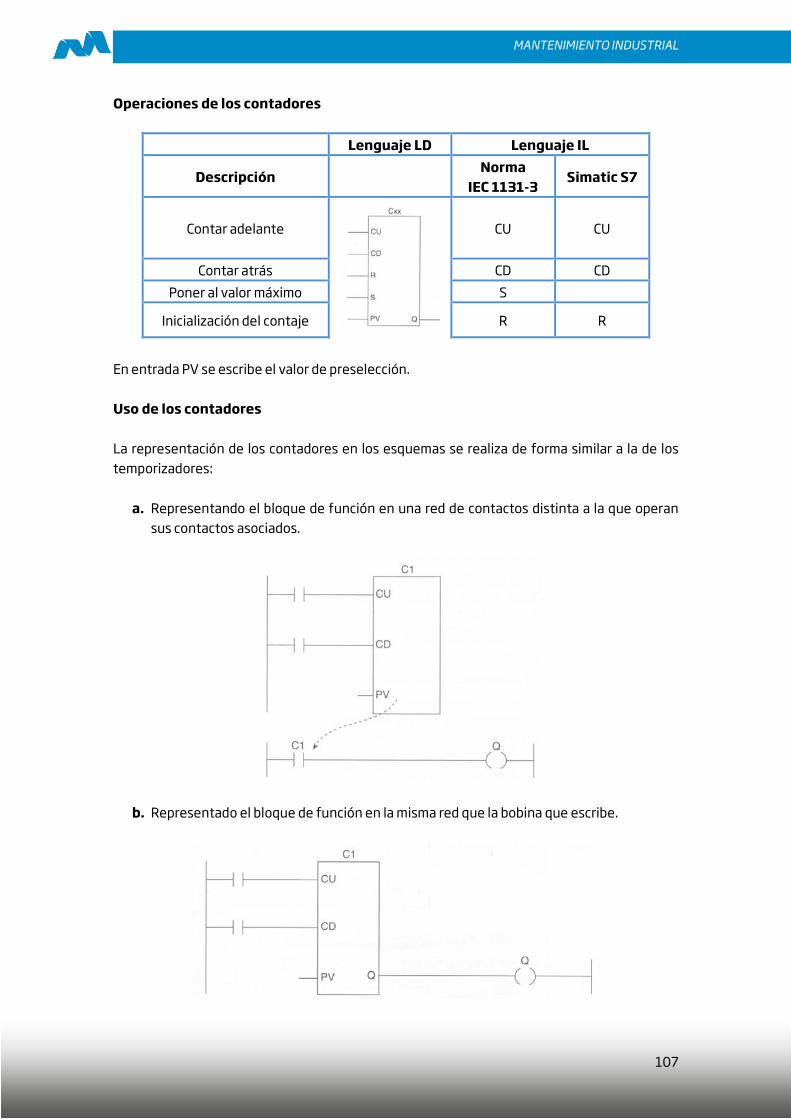
107
MANTENIMIENTO INDUSTRIAL
Operaciones de los contadores
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Contar adelante
CU CU
Contar atrás CD CD Poner al valor máximo S
Inicialización del contaje R R
En entrada PV se escribe el valor de preselección. Uso de los contadores La representación de los contadores en los esquemas se realiza de forma similar a la de los temporizadores:
a. Representando el bloque de función en una red de contactos distinta a la que operan sus contactos asociados.
b. Representado el bloque de función en la misma red que la bobina que escribe.

108
Módulo 6. Automatismos
Ejemplo de programación según la norma IEC 1131-3:
Ejemplo de programación en Simatic S7: En los autómatas Simatic S7 los contadores se lanzan con las operaciones CTU y CTUD, contar adelante y contar adelante/atrás respectivamente, sobre la variable del contador Zn. Las operaciones de carga que lo preceden respetan el orden de las entradas Cu, CD y R. (CD solamente se utiliza para el tipo CTUD).
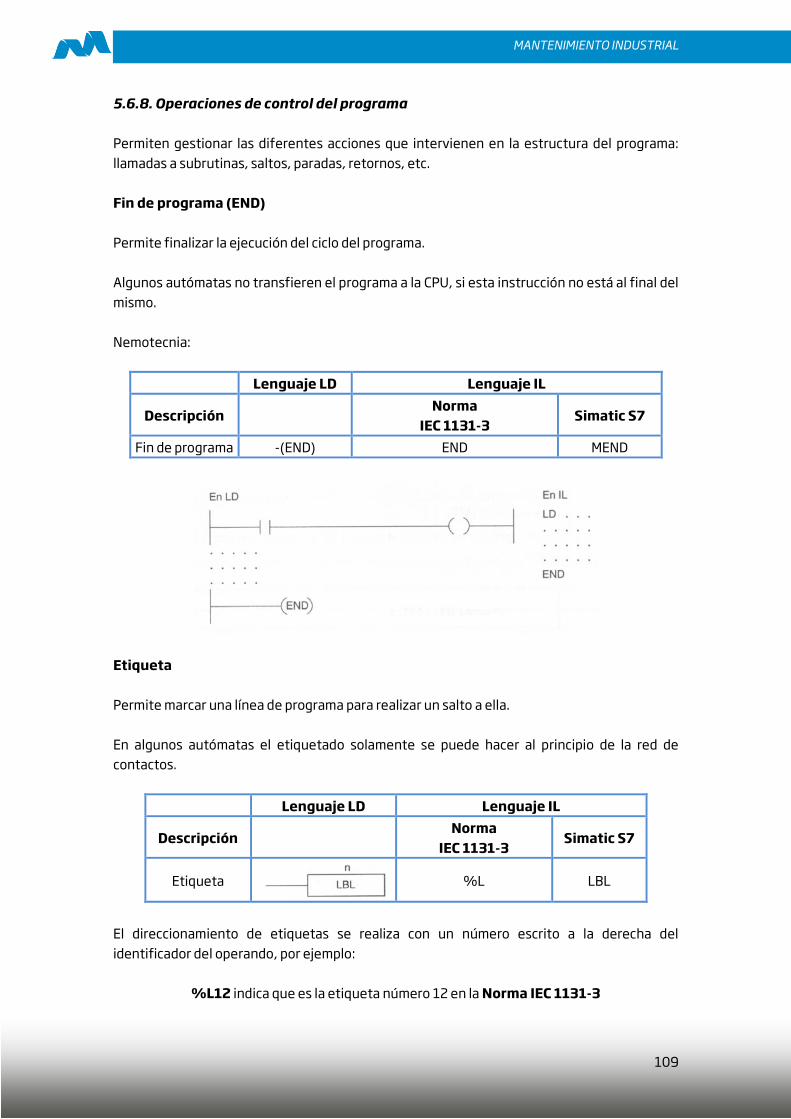
109
MANTENIMIENTO INDUSTRIAL
5.6.8. Operaciones de control del programa Permiten gestionar las diferentes acciones que intervienen en la estructura del programa: llamadas a subrutinas, saltos, paradas, retornos, etc. Fin de programa (END) Permite finalizar la ejecución del ciclo del programa. Algunos autómatas no transfieren el programa a la CPU, si esta instrucción no está al final del mismo. Nemotecnia:
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Fin de programa -(END) END MEND
Etiqueta Permite marcar una línea de programa para realizar un salto a ella. En algunos autómatas el etiquetado solamente se puede hacer al principio de la red de contactos.
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Etiqueta
%L LBL
El direccionamiento de etiquetas se realiza con un número escrito a la derecha del identificador del operando, por ejemplo:
%L12 indica que es la etiqueta número 12 en la Norma IEC 1131-3

110
Módulo 6. Automatismos
LBL 12 también indica que es la etiqueta número 12 en Simatic S7 Salto Desvía la ejecución del programa a una instrucción determinada. Nemotecnia:
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Salto n
-(JMP) JMP JMP
El salto se realiza escribiendo en la línea de programa la etiqueta como operando de la operación JMP. En el ejemplo se indica un salto a la etiqueta número 12 definida en el punto anterior:
Norma IEC 1131-3 Simatic S7 JMP %L12 JMP 12
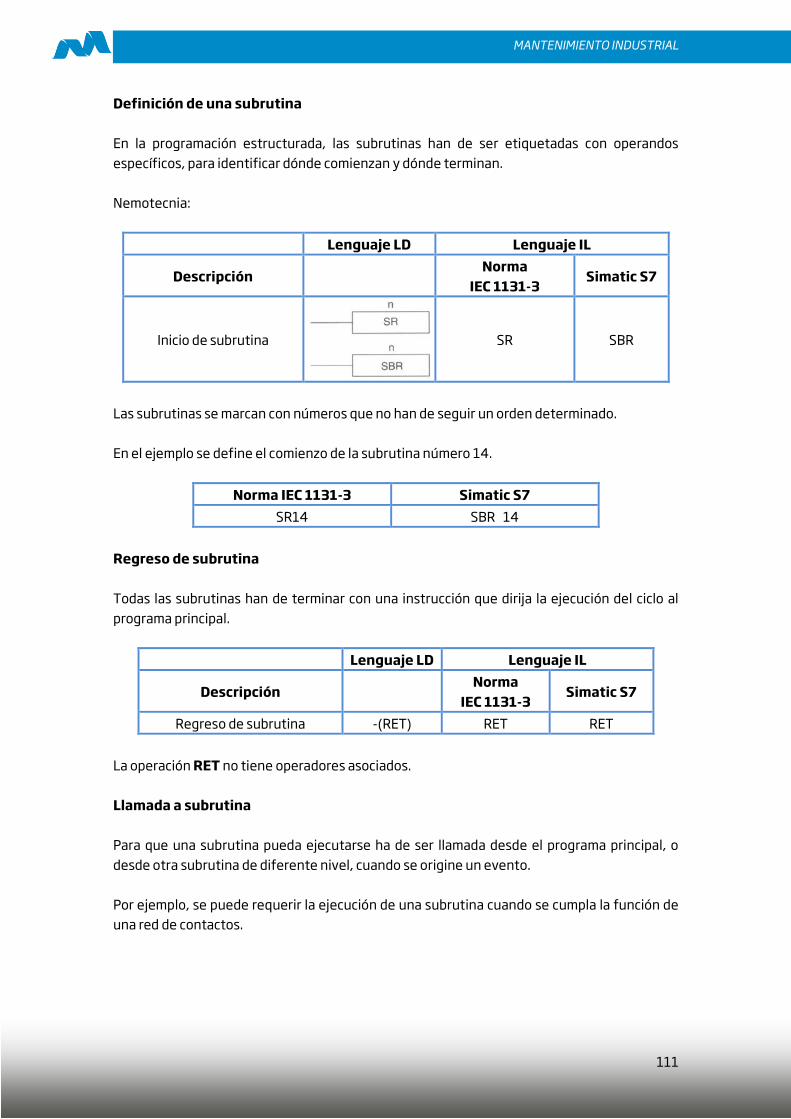
111
MANTENIMIENTO INDUSTRIAL
Definición de una subrutina En la programación estructurada, las subrutinas han de ser etiquetadas con operandos específicos, para identificar dónde comienzan y dónde terminan. Nemotecnia:
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Inicio de subrutina
SR SBR
Las subrutinas se marcan con números que no han de seguir un orden determinado. En el ejemplo se define el comienzo de la subrutina número 14.
Norma IEC 1131-3 Simatic S7 SR14 SBR 14
Regreso de subrutina Todas las subrutinas han de terminar con una instrucción que dirija la ejecución del ciclo al programa principal.
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Regreso de subrutina -(RET) RET RET La operación RET no tiene operadores asociados. Llamada a subrutina Para que una subrutina pueda ejecutarse ha de ser llamada desde el programa principal, o desde otra subrutina de diferente nivel, cuando se origine un evento. Por ejemplo, se puede requerir la ejecución de una subrutina cuando se cumpla la función de una red de contactos.

112
Módulo 6. Automatismos
Lenguaje LD Lenguaje IL
Descripción Norma
IEC 1131-3 Simatic S7
Llamada a subrutina -(CALL) CALL Según la norma IEC 1131-3, La llamada a subrutina no tiene operador y se realiza escribiendo sobre una bobina cuyo operando es la etiqueta de la subrutina. Por ejemplo, si a la entrada 2 del módulo 1 está activa se ejecuta la subrutina número 5. En lenguaje de contactos (LD):
En lista de instrucciones: LD %I1.2 SR5 Con la nemotecnia Simatic S7 la llamada se realiza con el operador CALL dirigido al número de la subrutina definido con SBR.
En (IL): LD E1.2 CALL 5

113
MANTENIMIENTO INDUSTRIAL














