Elementos Finitos 01 - · PDF fileCapítulo 1 Elementos de la mecánica de...
85
Índice Índice ........................................................................................................................... 1 Capítulo 1 Elementos de la mecánica de sólidos para problemas lineales elásticos ........ 3 1.1. Campos del desplazamiento y la deformación infinitesimal......................... 3 1.2. Campo del esfuerzo .................................................................................... 5 1.3. Ecuación constitutiva de un material lineal elástico isótropo: ley de Hooke. 6 1.3.1. Principio de los trabajos virtuales ............................................................ 9 1.4. Planteamiento del problema en el medio continuo ......................................10 1.5. Elementos de la mecánica de sólidos para problemas bidimensionales .......10 Capítulo 2 Formulación del problema elástico lineal bidimensional mediante el método de los elementos finitos .....................................................................................................15 2.1. Formulación general del problema elástico lineal .......................................15 2.2. Formulación del problema elástico lineal bidimensional ............................20 2.3. Elemento triangular lineal ..........................................................................25 2.4. Elemento rectangular bilineal .....................................................................32 2.5. Esfuerzos y deformaciones iniciales ...........................................................42 2.5.1. Esfuerzos y deformaciones iniciales en un elemento triangular lineal .....44 2.5.2. Esfuerzos y deformaciones iniciales en un elemento rectangular bilineal44 2.6. Algoritmo de cálculo .................................................................................45 2.7. Aproximación de los elementos bidimensionales lineales a flexión pura ....48 2.8. Elementos finitos bidimensionales de orden superior .................................49 Capítulo 3 Problemas de elasticidad bidimensional ......................................................51 3.1. Ejemplo de aplicación: ménsula de concreto sometida a una carga distribuida 51 3.2. Ejemplo de aplicación: principio de Saint Venant ......................................54 3.3. Ejemplo de aplicación: estructura de drenaje ..............................................57 Capítulo 4 Formulación del problema elástico lineal tridimensional mediante el método de los elementos finitos .....................................................................................................61 4.1. Elemento tetraédrico de cuatro nudos.........................................................61 4.2. Otros elementos finitos tridimensional .......................................................66 Capítulo 5 Formulación de estructuras laminares elásticas lineales mediante el método de los elementos finitos .....................................................................................................69 5.1. Análisis de placas delgadas ........................................................................70 5.1.1. Teoría de placas de Kirchhoff ................................................................70 5.1.2. Formulación en el método de los elementos finitos ................................76 5.1.3. Elemento rectangular de cuatro nudos no conforme: MZC .....................76 Referencias..................................................................................................................85
Transcript of Elementos Finitos 01 - · PDF fileCapítulo 1 Elementos de la mecánica de...

Índice
Índice ........................................................................................................................... 1 Capítulo 1 Elementos de la mecánica de sólidos para problemas lineales elásticos........ 3
1.1. Campos del desplazamiento y la deformación infinitesimal......................... 3 1.2. Campo del esfuerzo .................................................................................... 5 1.3. Ecuación constitutiva de un material lineal elástico isótropo: ley de Hooke. 6
1.3.1. Principio de los trabajos virtuales............................................................ 9 1.4. Planteamiento del problema en el medio continuo......................................10 1.5. Elementos de la mecánica de sólidos para problemas bidimensionales .......10
Capítulo 2 Formulación del problema elástico lineal bidimensional mediante el método de los elementos finitos.....................................................................................................15
2.1. Formulación general del problema elástico lineal.......................................15 2.2. Formulación del problema elástico lineal bidimensional ............................20 2.3. Elemento triangular lineal ..........................................................................25 2.4. Elemento rectangular bilineal.....................................................................32 2.5. Esfuerzos y deformaciones iniciales...........................................................42
2.5.1. Esfuerzos y deformaciones iniciales en un elemento triangular lineal .....44 2.5.2. Esfuerzos y deformaciones iniciales en un elemento rectangular bilineal44
2.6. Algoritmo de cálculo .................................................................................45 2.7. Aproximación de los elementos bidimensionales lineales a flexión pura ....48 2.8. Elementos finitos bidimensionales de orden superior .................................49
Capítulo 3 Problemas de elasticidad bidimensional......................................................51 3.1. Ejemplo de aplicación: ménsula de concreto sometida a una carga
distribuida 51 3.2. Ejemplo de aplicación: principio de Saint Venant ......................................54 3.3. Ejemplo de aplicación: estructura de drenaje..............................................57
Capítulo 4 Formulación del problema elástico lineal tridimensional mediante el método de los elementos finitos.....................................................................................................61
4.1. Elemento tetraédrico de cuatro nudos.........................................................61 4.2. Otros elementos finitos tridimensional .......................................................66
Capítulo 5 Formulación de estructuras laminares elásticas lineales mediante el método de los elementos finitos.....................................................................................................69
5.1. Análisis de placas delgadas ........................................................................70 5.1.1. Teoría de placas de Kirchhoff ................................................................70 5.1.2. Formulación en el método de los elementos finitos ................................76 5.1.3. Elemento rectangular de cuatro nudos no conforme: MZC .....................76
Referencias..................................................................................................................85

2 Índice
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
Capítulo 1 Elementos de la mecánica de sólidos para
problemas lineales elásticos
A continuación se describen los elementos de la mecánica clásica de sólidos en el marco de la mecánica del medio continuo que intervienen en la descripción del problema (Timoshenko & Goodier 1970; Spencer 1990; Mase & Mase 1999).
1.1. Campos del desplazamiento y la deformación infinitesimal
Se define el campo vectorial del desplazamiento [ ]Twvu=)(xu como el cambio de posición de un punto material o partícula entre las configuraciones actual y de referencia, ubicado en la posición [ ]Tzyx=x de la configuración de referencia del sólido, como lo ilustra la Figura 1.1(a).
En problemas bajo cargas estáticas monotónicas con material lineal elástico, la configu-ración de referencia o configuración no deformada establece la posición de cada partícula del sólido en el instante de tiempo inicial 0=t , es decir en el momento en que aún no se han aplicado las cargas externas. En cambio, la configuración actual o configuración de-formada describe la ubicación de cada partícula en el instante de tiempo presente tt = des-pués de aplicadas la cargas externas.
Sea L la longitud de un segmento recto PQ trazado entre dos puntos materiales denomi-nado línea material en la configuración de referencia y l la longitud de la misma línea en la configuración actual (Figura 1.1(a)). La deformación longitudinal infinitesimal en esa dirección se define como el alargamiento de una línea material dividida entre su longitud en la configuración de referencia, es decir LLllong )( −=ε .

4 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
0Ω
xP
zP
yP
PX
0=t
tΩ
tt =
Px
P
Q
P
L
Ql
Pdx
x
dy
dz
y
z
P x
y
z
du
dv
dw
x
y
z
xP
zP
yP
)( Pxu
0=t tt =
(a)
(b)
Configuración de
referencia
Configuración
actual
Configuración de
referencia
Configuración
actual
Entorno diferencial
0Ω
xP
zP
yP
PX
0=t
tΩ
tt =
Px
P
Q
P
L
Ql
Pdx
x
dy
dz
y
z
P x
y
z
du
dv
dw
x
y
z
xP
zP
yP
)( Pxu
0=t tt =
(a)
(b)
Configuración de
referencia
Configuración
actual
Configuración de
referencia
Configuración
actual
Entorno diferencial
Figura 1.1. Configuración de referencia y configuración actual de un cuerpo.
En un entorno diferencial, una la línea material de longitud dx paralela al eje x en la
configuración de referencia se alarga una cantidad du como lo indica la Figura 1.1(b), de tal forma que la deformación longitud en dirección x es igual a dxduxx =ε . Siendo u(x,y,z) la componente del desplazamiento en la dirección x función de la posición (x,y,z), la componente de deformación xxε es igual a:
x
uxx
∂
∂=ε (1.1)
De forma análoga, se obtienen las componentes de deformación longitudinal yyε y zzε en las direcciones y y z, de la forma:
z
w
y
vzzyy
∂
∂=
∂
∂= εε , (1.2)
Sean PQ y PR dos líneas materiales perpendiculares entre sí de longitud dx y dy en la configuración de referencia, que cambian a los segmentos ab y ac en la configuración ac-tual, como lo indica la xxx. El ángulo formado entre las líneas materiales, que es igual a
2π en la configuración de referencia, se reduce a xyγπ −2 , siendo xyγ la componente de deformación angular en notación ingenieril sobre el plano xy. El ángulo xyγ es igual a la suma de los ángulos 1α y 2α mostrados en la xxx, los cuales son aproximadamente iguales a dydu=1tanα y dxdv=2tanα respectivamente, bajo la hipótesis de deformación infi-nitesimal. Dadas las componentes del desplazamiento u(x,y,z) y v(x,y,z) en función de la posición, se concluye que la componente de la deformación angular ingenieril en el plano xy es igual a:

Análisis estructural mediante el método de los elementos finitos 5
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
x
v
y
uxy
∂
∂+
∂
∂=γ (1.3)
De manera similar, se obtienen las deformaciones angulares ingenieriles xzγ y yzγ en los planos xz y yz respectivamente, de la forma:
y
w
z
v
x
w
z
uyzxz
∂
∂+
∂
∂=
∂
∂+
∂
∂= γγ , (1.4)
Las seis componentes de deformación anteriormente presentadas definen el estado de deformación infinitesimal de un punto material o campo de deformación )(xε , el cual se puede expresar como una matriz columna de la forma:
[ ]T
yzxzxyzzyyxx γγγεεε=)(xε (1.5)
Por lo tanto, el campo de la deformación en notación ingenieril se puede expresar de forma matricial como el operador diferencial ∇ actuando sobre el campo del desplaza-miento )(xu , es decir:
∂+∂
∂+∂
∂+∂
∂
∂
∂
=
∂∂
∂∂
∂∂
∂
∂
∂
=
→∇=
wv
wu
vu
w
v
u
w
v
u
yz
xz
xy
z
y
x
yz
xz
xy
z
y
x
yz
xz
xy
zz
yy
xx
0
0
0
00
00
00
)()(
γ
γ
γ
ε
ε
ε
xuxε (1.6)
Siendo,
∂∂
∂∂
∂∂
∂
∂
∂
=∇
yz
xz
xy
z
y
x
0
0
0
00
00
00
(1.7)
1.2. Campo del esfuerzo
Como se indica en la xxx, el estado de esfuerzos en un punto material está definido por las tres componentes de esfuerzo normal zzyyxx σσσ ,, en las direcciones x, y y z, respectivamen-

6 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
(a)Eε
Nσ
E
1
(b)
γ
τ
G
1
(a)Eε
Nσ
E
1
(b)
γ
τ
G
1
(b)
γ
τ
G
1
te y por las tres componentes de esfuerzo cortante yzxzxy σσσ ,, en los planos xy, xz y yz, correspondientemente.
Las componentes del estado de esfuerzos de un punto material o campo de los esfuerzos )(xσ se pueden expresar en una matriz columna de la forma:
[ ]T
yzxzxyzzyyxx σσσσσσ=)(xσ (1.8)
1.3. Ecuación constitutiva de un material lineal elástico isótro-po: ley de Hooke
La ley de Hooke establece una relación lineal entre el esfuerzo normal y la deformación longitudinal en la misma dirección como lo indica la Figura 1.2(a), siendo la constante de proporcionalidad entre el esfuerzo y la deformación E, un parámetro del material denomi-nado módulo de elasticidad o módulo de Young. De igual forma, la ley de Hooke para cortante establece una relación lineal entre el esfuerzo cortante y la deformación angular ingenieril en un plano específico, como lo indica la Figura 1.2(b), cuya constante de pro-porcionalidad G es otro parámetro del material denominado modulo de elasticidad a cortan-te y determinado de la forma:
)1(2 ν+=
EG (1.9)
El esfuerzo de tracción actuante sobre la probeta produce un alargamiento en la direc-ción axial acompañado de una contracción transversal o perpendicular a la dirección del esfuerzo. En materiales elásticos lineales isótropos, la deformación lateral asociada a la contracción transversal es proporcional a la deformación axial asociada al alargamiento longitudinal. El cociente entre la deformación en la dirección lateral y la deformación en la dirección axial se conoce como relación de Poisson ν y se define como:
axial
lateral
ε
εν −= (1.10)
Figura 1.2. Ley de Hooke en el campo unidimensional: (a) relación esfuerzo normal vs. Deforma-ción longitudinal, (b) relación esfuerzo cortante vs. deformación angular.

Análisis estructural mediante el método de los elementos finitos 7
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
(a)
11σ
2x
1x
3x
11ε
22σ
11ε33σ
1
1
1
22ε
33ε
33ε
22ε22ε
11ε
33ε(b) (c)(a)
11σ
2x
1x
3x
2x
1x
3x
11ε
22σ
11ε33σ
1
1
1
22ε
33ε
33ε
22ε22ε
11ε
33ε(b) (c)
Sea un paralelepípedo diferencial unitario de lados paralelos a los ejes coordenados xyz
sometido exclusivamente a un esfuerzo normal xx
σ en la dirección x mostrado en la Figura
1.3(a). La deformación longitudinal en la dirección x es igual a Exxxx
σε = , mientras que la deformación lateral dada en las direcciones y y z corresponde a Exxzzyy σνεε −== . De la misma manera, si el elemento diferencial está sometido a un esfuerzo normal yyσ solamente como lo indica la Figura 1.3(b), la deformación longitudinal en la misma direc-ción del esfuerzo será Eyyyy σε = y la deformación lateral en las direcciones x y z es igual a Eyyzzxx σνεε −== . Si ahora actúa un esfuerzo normal
zzσ sobre el elemento diferen-
cial como se ilustra en la Figura 1.3(c), la deformación longitudinal en la misma dirección es igual a E
zzzzσε = y la deformación lateral en las direcciones x y y corresponde a
Ezzyyxx σνεε −== .
Figura 1.3. Deformaciones longitudinales en un elemento diferencial cuando actúa un esfuerzo normal: (a) en dirección x, (b) en dirección y, (c) en dirección z.
Considerando que los esfuerzos cortantes solo producen deformaciones angulares, las
deformaciones longitudinales obtenidas de la acción de los esfuerzos normales son iguales a:
( )
( )
( )zzyyxxzz
zzyyxxyy
zzyyxxxx
E
E
E
σνσνσε
νσσνσε
νσνσσε
+−−=
−+−=
−−=
1
1
1
(1.11)
Despejando las componentes de esfuerzo normal de la expresión anterior se obtiene las siguientes ecuaciones:

8 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
[ ]
[ ]
[ ]zzyyxxzz
zzyyxxyy
zzyyxxxx
E
E
E
εννενενν
σ
νεεννενν
σ
νενεεννν
σ
)1()21)(1(
)1()21)(1(
)1()21)(1(
−++−+
=
+−+−+
=
++−−+
=
(1.12)
Por otro lado, la deformación angular ingenieril en el plano xy es proporcional al esfuer-zo cortante en dicho plano de la forma Gxyxy σγ = . De igual manera, se obtienen las si-guientes relaciones en los planos xz y yz.
GGG
yz
yzxz
xz
xy
xy
σγ
σγ
σγ === ,, (1.13)
Despejando las componentes de esfuerzo cortante y sustituyendo la Ecuación (1.9) se tiene que:
yzyzxzxzxyxy
EEEγ
νσγ
νσγ
νσ
)1(2,
)1(2,
)1(2 +=
+=
+= (1.14)
Las seis expresiones dadas en las ecuaciones (1.12) y (1.14) se pueden escribir de forma matricial como:
−
−
−
−
−
−
−+=
yz
xz
xy
zz
yy
xx
yz
xz
xy
zz
yy
xx
sim
E
γ
γ
γ
ε
ε
ε
ν
ν
ν
ν
νν
ννν
νν
σ
σ
σ
σ
σ
σ
)21(
0)21(
00)21(
000)1(
000)1(
000)1(
)21)(1(
21
21
21
(1.15)
De acuerdo a lo anterior, se define la matriz constitutiva de un material elástico lineal isótropo D como:
−
−
−
−
−
−
−+=
)21(
0)21(
00)21(
000)1(
000)1(
000)1(
)21)(1(
21
21
21
ν
ν
ν
ν
νν
ννν
νν
sim
ED
(1.16)
y por lo tanto, la ecuación constitutiva será de la forma:

Análisis estructural mediante el método de los elementos finitos 9
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
εDσ = (1.17)
1.3.1. Principio de los trabajos virtuales
La posición de todas las partículas de un cuerpo material en un instante de tiempo se deno-mina configuración. Se definen como configuraciones admisibles al conjunto de configu-raciones que satisfacen las condiciones de borde cinemáticas de un cuerpo. De todas las configuraciones admisibles, solo una de ellas, denominada configuración verdadera, res-ponde a la condición de equilibrio de un cuerpo sometido a fuerzas reales.
Las configuraciones admisibles están restringidas a la vecindad de la configuración ver-dadera, por lo tanto se obtienen de variaciones infinitesimales o simplemente variaciones
de dicha configuración. Las variaciones dadas por las configuraciones admisibles que además cumplen con las condiciones de equilibrio en un cuerpo material se denominan desplazamientos virtuales. Tales desplazamientos corresponden a valores arbitrarios mien-tras actúan valores fijos de las fuerzas reales en el cuerpo.
En cuerpos deformables, el trabajo virtual hecho por las fuerzas reales se puede dividir en dos partes: el trabajo virtual hecho por las fuerzas internas denominado trabajo virtual
interno y el trabajo virtual realizado por las fuerzas externas llamado trabajo virtual exter-
no (Oñate 1995). Sea un cuerpo de volumen V y de superficie de contorno V∂ , sujeto a fuerzas de cuerpo
por unidad de volumen b, a fuerzas de superficie por unidad de área p y a fuerzas puntuales )( nxf aplicadas sobre el contorno Vt ∂⊂Γ , como lo indica la xxx. Las condiciones de
borde sobre el cuerpo corresponden a valores conocidos del desplazamiento real ∗= uu en los puntos materiales que hacen parte de un contorno definido Vu ∂⊂Γ .
El campo del desplazamiento virtual [ ]Twvu δδδδ =)(xu , definido como una varia-ción del desplazamiento, corresponde a una función cualquiera que cumple con la condi-ción de borde de la forma:
uΓ∈∀= x0xu )(δ (1.18)
El trabajo virtual externo, es aquel realizado por las fuerzas reales externas b, p y )( nxf mientras se presenta un desplazamiento virtual uδ . En cambio, el trabajo virtual
interno es el trabajo realizado por el esfuerzo σ mientras ocurren deformaciones generadas por desplazamientos virtuales uδ∇ , es decir, es igual a la densidad de energía de deforma-ción σu T)( δ∇ integrada en el volumen del sólido.
El principio de los trabajos virtuales establece que un cuerpo está en equilibrio si y solo si, el trabajo virtual realizado por todas las acciones internas y externas es nulo, es decir:
∑∫∫∫=Γ
++=∇r
n
n
T
n
V
TT
V
T dVdSdV
t1
)()()( xfxubupuσu δδδδ (1.19)

10 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
donde )(n
xuδ y )(n
xf son los vectores de desplazamiento virtual y de fuerza puntual de una partícula ubicada en la posición
nx . El parámetro r indica el total de puntos materiales
donde se aplica una fuerza puntual. La ecuación anterior es válida para todo campo de desplazamientos virtuales que cum-
pla con las condiciones de borde cinemáticas dadas en la Ecuación (1.18). Los vectores de fuerzas puntuales )(
nxf , de fuerzas de superficie p y de fuerzas de cuerpo b son de la for-
ma:
[ ][ ] [ ]T
zyx
T
zyx
T
zyxn
bbbppp
fff
==
=
bp
xf
,
)( (1.20)
1.4. Planteamiento del problema en el medio continuo
El problema del comportamiento mecánico de un sólido sometido a acciones externas se plantea de la siguiente manera:
Obtener el campo de los desplazamientos )(xu para todo punto material en la posición x que pertenece al dominio del sólido V, el cual cumple con las condiciones de borde
∗= uxu )( en todo x contenido en un contorno definido Vu
∂⊂Γ , y que además satisface la relación deformación – desplazamiento expresadas en la Ecuación (1.6), la relación consti-tutiva del material indicada en la Ecuación (1.15) y las condiciones de equilibrio (esta últi-ma planteada mediante el principio de los trabajos virtuales en la Ecuación (1.19)).
Después de obtenido el campo de desplazamiento, se pueden calcular los campos de la deformación y del esfuerzo para todo punto material del sólido utilizando las expresiones (1.6) y (1.15).
La solución analítica está limitada a problemas sencillos con geometrías regulares, por tal razón el planteamiento anterior requiere de una implementación mediante métodos nu-méricos como por ejemplo el método de los elementos finitos.
1.5. Elementos de la mecánica de sólidos para problemas bidi-mensionales
En algunos problemas donde el comportamiento mecánico es el mismo en los puntos mate-riales contenidos en diferentes planos perpendiculares, el dominio se puede simplificar a un espacio bidimensional. Por lo tanto los campos del desplazamiento, la deformación y el esfuerzo no dependen de la componente de la posición normal al plano donde están conte-nidos, por ejemplo, si problema se simplifica a un plano xy, tales los campos son funciones de la posición (x,y) e independientes de z.
Un sólido está en condición plana de esfuerzos en el plano xy, si las componentes de es-fuerzo fuera de dicho plano son nulas, es decir:

Análisis estructural mediante el método de los elementos finitos 11
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
0,0,0 === yzxzzz σσσ (1.21)
y en consecuencia el campo de los esfuerzos se puede expresar mediante una matriz co-lumna de la forma:
[ ]T
xyyyxxyx σσσ=),(σ (1.22)
Las componentes de deformación dadas en las ecuaciones (1.11) y (1.13), se reducen a las siguientes:
( ) ( ) ( )
0,0,)1(2
,1
,1
==+
=
+−=+−=−=
yzxzxyxy
yyxxzzyyxxyyyyxxxx
E
EEE
γγσν
γ
σσν
εσνσενσσε (1.23)
Despejando las componentes de esfuerzo de las expresiones anteriores, se puede obtener la siguiente relación matricial εDσ = entre las componentes de esfuerzo y de deformación contenidas en el plano xy, para una condición plana de esfuerzos.
−−
=
xy
yy
xx
xy
yy
xxE
γ
ε
ε
ν
ν
ν
νσ
σ
σ
)1(00
01
01
121
2 (1.24)
donde la matriz constitutiva elástica para un estado plano de esfuerzos D y la matriz co-lumna de las componentes de la deformación ε contenidas en el plano xy son iguales a:
=
−−
=
xy
yy
xxE
γ
ε
ε
ν
ν
ν
νεD ,
)1(00
01
01
121
2 (1.25)
La componente de deformación longitudinal en dirección z se expresa mediante una ecuación escalar adicional en función de las demás componentes de deformación longitudi-nal, de la forma:
( )yyxxzz εε
ν
νε +
−−=
1 (1.26)
Un sólido está en condición plana de deformaciones en el plano xy, si las componentes de deformación que no están contenidas en dicho plano son nulas, es decir:
0,0,0 === yzxzzz γγε (1.27)
y en consecuencia el campo de las deformaciones se puede expresar mediante una ma-triz columna de la forma:
[ ]T
xyyyxxyx εεε=),(ε (1.28)

12 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
Las componentes de esfuerzo definidas en las ecuaciones (1.12) y (1.14), se reducen a las siguientes:
[ ]
[ ]
[ ]
0,0,)1(2
)21)(1(
)1()21)(1(
)1()21)(1(
==+
=
+−+
=
−+−+
=
+−−+
=
yzxzxyxy
yyxxzz
yyxxyy
yyxxxx
E
E
E
E
σσγν
σ
εενν
νσ
εννενν
σ
νεεννν
σ
(1.29)
A partir de las ecuaciones anteriores se puede expresar una relación matricial εDσ = entre las componentes de esfuerzo y de deformación contenidas en el plano xy, para una condición plana de deformaciones de la forma:
−
−
−
−+=
xy
yy
xx
xy
yy
xxE
γ
ε
ε
ν
νν
νν
ννσ
σ
σ
)21(00
0)1(
0)1(
)21)(1(21
(1.30)
donde la matriz constitutiva elástica para un estado plano de deformaciones D y la ma-triz columna de las componentes de la esfuerzo contenidas en el plano xy son iguales a:
=
−
−
−
−+=
xy
yy
xxE
σ
σ
σ
ν
νν
νν
ννσD ,
)21(00
0)1(
0)1(
)21)(1(21
(1.31)
La componente de esfuerzo normal en dirección z se expresa mediante una ecuación es-calar adicional en función de las demás componentes de esfuerzo normal, de la forma:
)( yyxxzz σσνσ += (1.32)
En general en problemas bidimensionales, solo se expresan las componentes contenidas en el plano xy del desplazamiento, las fuerzas puntuales, de superficie y de cuerpo, es decir:
[ ][ ] [ ] [ ]T
yx
T
yx
T
yxnn
T
bbyxppyxffyx
vuyx
===
=
),(,),(,),(
),(
bpf
u (1.33)
A partir de la Ecuación (1.6), la relación entre las componentes contenidas en el plano xy de la deformación y del desplazamiento se expresa de la forma:
∂+∂
∂
∂
=
∂∂
∂
∂
=
→∇=
vu
v
u
v
u
xy
y
x
xy
y
x
xy
yy
xx
0
0
γ
ε
ε
uε (1.34)
donde el operador diferencial se reduce a:

Análisis estructural mediante el método de los elementos finitos 13
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
∂∂
∂
∂
=∇
xy
y
x
0
0
(1.35)


Capítulo 2 Formulación del problema elástico lineal bidimensional mediante el método de los
elementos finitos
Este capítulo presenta la formulación mediante el método de los elementos finitos del pro-blema mecánico bidimensional para sólidos sometidos a fuerzas estáticas puntuales o dis-tribuidas, cuyo material es elástico, lineal e isótropo (Zienkiewicz 1980; Segerlin 1984; Weaver & Johnson 1984; Cook, Malkus et al. 1989; Oñate 1995; Hughes 2000; Oñate & Zárate 2000).
2.1. Formulación general del problema elástico lineal
Sea un sólido cuyo volumen V es aproximadamente igual a suma de m subdominios de cada elemento finito )(eV como lo indica la XXX, el principio de los trabajos virtuales se puede expresar de la forma:
∑∑ ∫∫∑ ∫== Γ=
+
+=∇
r
n
n
T
n
m
e V
e
T
ee
T
e
m
e V
e
T
ee
te
dVdSdV11
)()()()(1
)()( )()()()()(
xfxubupuσu δδδδ (2.1)
donde los vectores )(ep , )(eb , )(eσ y )(euδ , corresponden a las fuerzas de superficie, a las fuerzas de cuerpo, a los esfuerzos y a los desplazamientos virtuales respectivamente en el interior del elemento finito e.
Ahora, n
x corresponde a la posición un punto material ubicado en uno de los r nudos de la malla de elementos finitos. Por lo tanto el último término a la derecha en la ecuación anterior indica el trabajo virtual generado por las fuerzas nodales.
En el problema mecánico se busca el campo vectorial del desplazamiento [ ]Twvu=)(xu para todo punto material de posición [ ]Tzyx=x del sólido. Si se
divide el cuerpo en subregiones denominadas elementos finitos )(eV , el campo del despla-zamiento se puede representar mediante una función de aproximación suave y continua por cada elemento [ ]Teeee wvu )()()()( )( =xu , tal que )()( )()( ee V∈∀= xxuxu .
Se observa que la función de aproximación del elemento finito es una cantidad vectorial de tres componentes, las cuales se expresan como funciones de aproximación escalares independientes como:

16 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)()()()(1
)(1
)(
)()()()(1
)(1
)(
)()()()(1
)(1
)(
),,(),,(),,(),,(
),,(),,(),,(),,(
),,(),,(),,(),,(
ee
n
e
n
eee
ee
n
e
n
eee
ee
n
e
n
eee
VzyxwzyxNwzyxNzyxw
VzyxvzyxNvzyxNzyxv
VzyxuzyxNuzyxNzyxu
∈∀++=
∈∀++=
∈∀++=
K
K
K
(2.2)
El elemento finito tridimensional mostrado en la xxx, tiene tres funciones de aproxima-ción asociadas a las tres componentes de desplazamientos y en consecuencia tiene tres va-lores nodales de desplazamiento )()()( ,, e
i
e
i
e
iwvu en el nudo i, de un total de n nudos. Asi-
mismo, el elemento tiene n funciones de forma )(e
iN .
Estas ecuaciones escalares se pueden reescribir matricialmente de la forma:
=
)(
)(
)(
)(2
)(2
)(2
)(1
)(1
)(1
)()(2
)(1
)()(2
)(1
)()(2
)(1
)(
)(
)(
000000
000000
000000
e
n
e
n
e
n
e
e
e
e
e
e
e
n
ee
e
n
ee
e
n
ee
e
e
e
w
v
u
w
v
u
w
v
u
NNN
NNN
NNN
w
v
u
M
M
MLLL
LLL
LLL
(2.3)
Por lo tanto, la función de aproximación del elemento finito corresponde al desplaza-miento en cualquier punto de su interior )()( xu e , el cual está definido como el producto entre las funciones de forma del elemento )()( xN e y el vector de valores nodales del des-plazamiento )(ea , es decir:
)()()()( )()( e
eee V∈∀= xaxNxu (2.4)
donde,
[ ]Te
n
e
n
e
n
eeeeee
e
e
n
ee
e
n
ee
e
n
ee
e
wvuwvuwvu
NNN
NNN
NNN
zyx
)()()()(2
)(2
)(2
)(1
)(1
)(1)(
)()(2
)(1
)()(2
)(1
)()(2
)(1
)(
000000
000000
000000
),,(
LLL
LLL
LLL
LLL
=
=
a
N
(2.5)

Análisis estructural mediante el método de los elementos finitos 17
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
El número de filas de la matriz de funciones de forma )(eN corresponde al número de funciones de aproximación escalares definidas por nudo o número de grados de libertad por nudo (tres en problemas tridimensionales), mientras que el número de columnas es igual al número de nudos del elemento multiplicado por el número de grados de libertad por nudo. El tamaño del vector de valores nodales de desplazamiento de un elemento finito )(ea está definido por el total de grados de libertad del elemento, es decir por el número de nudos n multiplicado por el número de grados de libertad por nudo.
La matriz columna de las componentes de la deformación es igual al operador diferen-cial actuando sobre el vector del desplazamiento. Al sustituir la expresión anterior en la Ecuación (1.6), se obtiene:
)()()()(
)()()()(
)()(
)()()(e
eee
eeee
V∈∀=
∇=∇=
xaxBxε
axNxuxε
(2.6)
Siendo )()( ee NB ∇= el operador diferencial definido en la Ecuación (1.7), actuando so-bre la matriz de las funciones de forma del elemento, es decir:
∂∂
∂∂
∂∂
∂
∂
∂
=)()(
2)(
1
)()(2
)(1
)()(2
)(1
)(
000000
000000
000000
0
0
0
00
00
00
e
n
ee
e
n
ee
e
n
ee
yz
xz
xy
z
y
x
e
NNN
NNN
NNN
LLL
LLL
LLL
B
(2.7)
El número de filas de la matriz anterior corresponde al número de componentes de de-formación, seis en el problema tridimensional, mientras que el número de columnas es igual al número de grados de libertad del elemento finito.
A partir de la relación entre el esfuerzo y la deformación definida por la Ecuación (1.17) para un sólido lineal elástico isótropo, se puede establecer dicha relación en el interior de un elemento finito de la forma:
)()()()( )()( e
eee V∈∀= xxεDxσ (2.8)
donde la matriz constitutiva elástica del elemento )(eD es igual a la matriz D definida en la Ecuación (1.16).
Sustituyendo la Ecuación (2.6) en la expresión anterior se tiene que:
)()()()( eeee aBDσ = (2.9)
De la misma forma como se expresa el desplazamiento real en términos de las funciones de forma y los valores nodales, el desplazamiento virtual )(euδ y la deformación virtual
)(euδ∇ en un elemento finito son iguales a:

18 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
( ) T
e
T
e
T
eeee
T
e
T
e
T
eeee
)()()()()()(
)()()()()()(
,
,
BauaBu
NauaNu
δδδδ
δδδδ
=∇=∇
== (2.10)
siendo )(eaδ el vector de valores nodales de desplazamiento virtual del elemento finito. Sustituyendo las expresiones (2.9) y (2.10) en la Ecuación (2.1), se obtiene lo siguiente:
)(
1)()()()()(
)(1
)()()()(
)()(
)(
nTm
e V
e
T
ee
T
e
T
e
e
m
e V
ee
T
e
T
e
ee
e
dVdS
dV
fabNpNa
aBDBa
δδ
δ
+
+
=
∑ ∫∫
∑ ∫
= Γ
=
(2.11)
donde aδ y )(nf corresponden a los vectores de desplazamiento virtual y de fuerza en
los nudos de la malla de elementos finitos. El término entre paréntesis a la izquierda de la igualdad anterior se definen como la ma-
triz de rigidez del elemento )(eK , mientras que el término entre paréntesis a la derecha es el
vector de fuerzas nodales equivalentes del elemento )(ef , es decir:
∫=)(
)()()()(
eV
ee
T
e
e dVBDBK (2.12)
∫∫ +=Γ )()(
)()()()()(
ee V
e
T
ee
T
e
e dVdS bNpNf (2.13)
Reemplazando las ecuaciones (2.12) y (2.13) en la expresión (2.11) se tiene que:
0)(
1
)()()(
1
)()( =−−∑∑
==
nTm
e
eT
ee
m
e
eT
e fafaaKa δδδ (2.14)
La ecuación anterior se puede escribir en términos del vector de desplazamiento virtual aδ y del vector de desplazamiento real a en los nudos de la malla de elementos finitos, de
tal forma que:
0=− faKaa TT δδ (2.15)
donde K es la matriz de rigidez del sólido obtenida del ensamblaje de las matrices de ri-gidez de los elementos, de la forma:
=
=
)(
1)(
em
e
KK A (2.16)
y f es el vector de fuerzas nodales de la malla resultante del ensamblaje de los vectores de fuerza nodales equivalentes de cada uno de los elementos finitos más el vector de fuer-zas nodales aplicadas en los nudos de la malla, es decir:
Análisis estructural mediante el método de los elementos finitos 19
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)()(
1)(
nem
e
fff +
=
=A (2.17)
Cancelando el factor común Taδ de la Ecuación (2.15), se tiene que:
0fKa =− (2.18)
El vector de desplazamientos nodales del sólido a se puede dividir en un subvector de desplazamientos nodales desconocidos αa y un subvector de desplazamientos nodales co-nocidos βa dado por las condiciones de borde del problema, de tal manera que la ecuación anterior se puede reescribir como:
=
−
0
0
f
f
a
a
KK
KK
β
α
β
α
βββα
αβαα (2.19)
La matriz de rigidez K se ha dividido en las submatrices βααβαα KKK ,, y ββK , de acuerdo con el número de desplazamientos nodales (o grados de libertad) desconocidos y conocidos de la malla. Por las mismas razones el vector de fuerzas nodales f está confor-mado por los subvectores αf y βf . En consecuencia la ecuación anterior corresponde a dos ecuaciones matriciales de la forma:
=−+
=−+
0faKaK
0faKaK
ββββαβα
αβαβααα (2.20)
Despejando el vector de desplazamientos nodales desconocidos de la primera expresión se tiene que:
( )βαβαααα aKfKa −= −1 (2.21)
Obtenido el vector de desplazamientos nodales completo [ ]TTT
βα aaa = , se pueden ex-traer a partir de él, los vectores de desplazamiento en los nudos de cada elemento )(ea , de acuerdo con la numeración de los grados de libertad asociados al elemento que se indican en la tabla de incidencias.
El vector del desplazamiento en el interior del elemento [ ]Te wvuzyx =),,()(u se ob-tienen del producto de la matriz de funciones de forma evaluada para la coordenada (x,y,z) y el vector de desplazamientos nodales del elemento )(ea , como lo indica la Ecuación (2.4).
La matriz columna que contiene las componentes de la deformación en el interior de cada elemento finito [ ]T
yzxzxyzzyyxxe zyx γγγεεε=),,()(ε , se calcula mediante el producto entre la matriz de operadores diferenciales actuando sobre las funciones de forma evaluada para la coordenada (x,y,z) y el vector de desplazamientos nodales del elemento
)(ea , como lo indica la Ecuación (2.6). La matriz columna que contiene las componentes del esfuerzo en el interior de cada
elemento finito [ ]T
yzxzxyzzyyxxe zyx σσσσσσ=),,()(σ , se obtiene de la multipli-

20 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
cación matricial entre la matriz constitutiva elástica )(eD y la matriz columna de la defor-mación ),,()( zyxeε en un punto específico x, es decir:
)()()()( )()()( e
eee V∈∀= xxεDxσ (2.22)
2.2. Formulación del problema elástico lineal bidimensional
En problemas simplificados a un espacio bidimensional, el sólido muestra en el plano xy una geometría cualquiera, mientras que en la dirección z tiene un espesor constante t para un estado plano de esfuerzos o una espesor unitario 0.1=t para un estado plano de defor-maciones.
La reducción del problema a un dominio bidimensional se establece expresando al vo-lumen del sólido V como el producto entre su área A en el plano xy y su espesor t y por lo tanto un elemento diferencial de volumen del sólido dAtdV = . Asimismo, el dominio del problema se puede dividir en pequeños subdominios representados por elementos finitos bidimensionales de área )(e
A en el plano xy y espesor )(et , donde el área del sóli-do ∑ =
≅m
e
eAA
1
)( . Siendo el campo vectorial de los desplazamientos la variable que se desea obtener del
planteamiento del problema mecánico, la función de aproximación del elemento finito co-rresponde al vector del desplazamiento en cualquier punto de su interior. Si el desplaza-miento es función de la posición (x,y), la función de aproximación del elemento finito esta-rá definida en el espacio bidimensional xy, es decir )()( ),(),(),( ee Ayxyxyx ∈∀= uu .
De acuerdo a lo anterior, la función de aproximación del elemento es una cantidad vectorial que a su vez corresponde a dos funciones de aproximación escalares independien-tes ),()( yxu e y ),()( yxv e , las cuales representan las componentes del desplazamiento en dirección x y y, respectivamente. Cada función de aproximación escalar se puede expresar en términos de las funciones de forma y de los valores nodales del elemento finito (Figura xxx), como:
)()()()(1
)(1
)(
)()()()(1
)(1
)(
),(),(),(),(
),(),(),(),(ee
n
e
n
eee
ee
n
e
n
eee
AyxvyxNvyxNyxv
AyxuyxNuyxNyxu
∈∀++=
∈∀++=
K
K (2.23)
siendo n el número de nudos del elemento. Estas ecuaciones escalares se pueden rees-cribir matricialmente de la forma:

Análisis estructural mediante el método de los elementos finitos 21
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
=
)(
)(
)(2
)(2
)(1
)(1
)()(2
)(1
)()(2
)(1
)(
)(
000
000
e
n
e
n
e
e
e
e
e
n
ee
e
n
ee
e
e
v
u
v
u
v
u
NNN
NNN
v
u
M
MLL
LL (2.24)
Por lo tanto, el desplazamiento de cualquier punto (x,y) en el dominio de un elemento finito cuya matriz de funciones de forma es ),()( yxeN , se expresa en términos de los valo-res nodales del desplazamiento en el elemento )(ea como:
)()()()( ),(),(),( e
eee Ayxyxyx ∈∀= aNu (2.25)
donde,
[ ][ ]Teee
Te
n
e
n
eeee
e
e
n
ee
e
n
ee
e
vu
vuvuvu
NNN
NNNyx
)()()(
)()()(2
)(2
)(1
)(1)(
)()(2
)(1
)()(2
)(1
)(000
000),(
=
=
=
u
a
N
LL
LL
LL
(2.26)
De acuerdo con la Ecuación (2.6), la matriz columna de la deformación en el interior del elemento finito para problemas bidimensionales [ ]Te
xy
e
yy
e
xxe yx)()()(
)( ),( γεε=ε se define como:
)()()()( ),(),(),( e
eee Ayxyxyx ∈∀= aBε (2.27)
siendo ),()( yxeB el operador diferencial dado en la Ecuación (1.35) actuando sobre las funciones de forma, es decir:
∂∂∂∂∂∂
∂∂∂
∂∂∂
=
∂∂
∂
∂
=
)()()(2
)(2
)(1
)(1
)()(2
)(1
)()(2
)(1
)(
)()(2
)(1
)()(2
)(1
)(
000
000
),(
000
0000
0
),(
e
nx
e
ny
e
x
e
y
e
x
e
y
e
ny
e
y
e
y
e
nx
e
x
e
x
e
e
n
ee
e
n
ee
xy
y
x
e
NNNNNN
NNN
NNN
yx
NNN
NNNyx
LL
LL
LL
LL
LL
B
B
(2.28)
22 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
La matriz columna que contiene a las componentes de esfuerzo en el interior de un ele-mento finito bidimensional [ ]Te
xy
e
yy
e
xxe yx)()()(
)( ),( σσσ=σ para materiales lineales elásticos, es igual a:
)()()()()(
)()()(
),(),(),(
),(),(e
eeee
eee
Ayxyxyx
yxyx
∈∀=
=
aBDσ
εDσ
(2.29)
La matriz constitutiva elástica )(eD indicada en la Ecuación (1.25) para condición plana de esfuerzos y en la Ecuación (1.31) para condición plana de deformaciones, se puede ex-presar como:
)1(2,
)21)(1(,
)21)(1()1(
.
)1(2,
1,
1
.
00
0
0
)(33
)(12
)(22
)(11
)(332
)(122
)(22
)(11
)(33
)(22
)(12
)(12
)(11
)(
ννν
ν
νν
ν
νν
ν
ν
+=
−+=
−+
−==
+=
−=
−==
=
ED
ED
EDD
ndeformaciódeplanacond
ED
ED
EDD
esfuerzosdeplanacond
D
DD
DD
eeee
eeee
e
ee
ee
eD
(2.30)
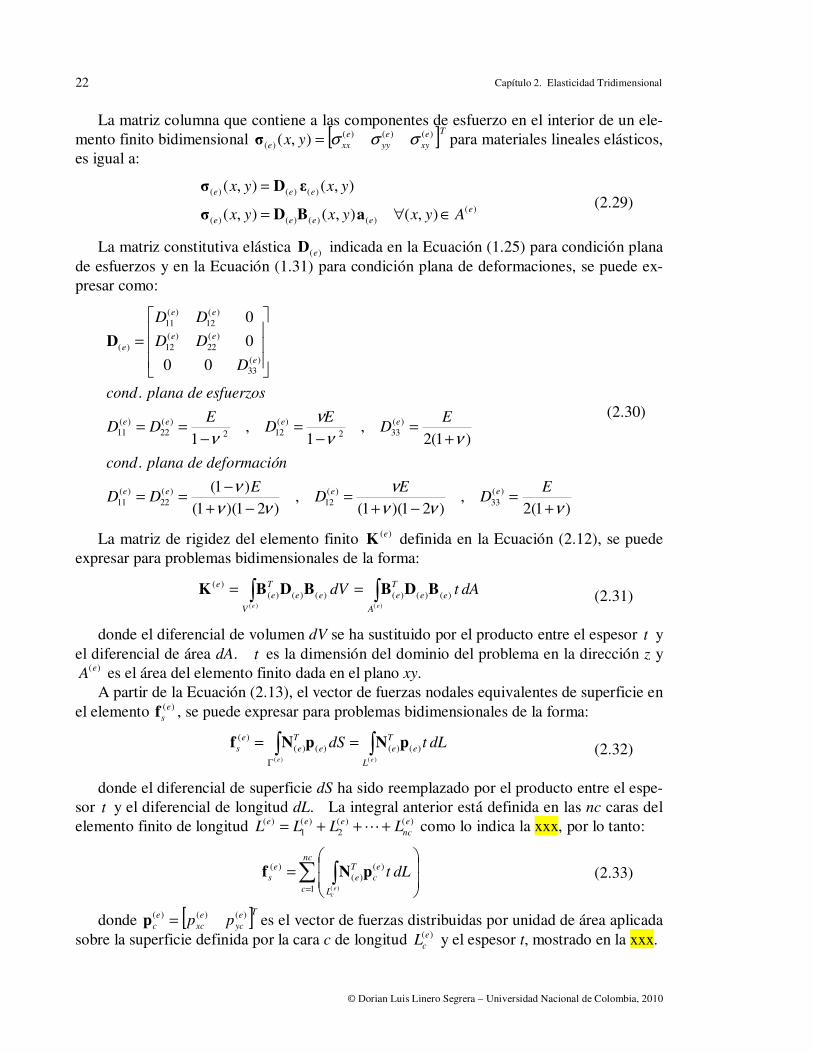
La matriz de rigidez del elemento finito )(eK definida en la Ecuación (2.12), se puede
expresar para problemas bidimensionales de la forma:
∫∫ ==)()(
)()()()()()()(
ee A
ee
T
e
V
ee
T
e
e dAtdV BDBBDBK (2.31)
donde el diferencial de volumen dV se ha sustituido por el producto entre el espesor t y el diferencial de área dA. t es la dimensión del dominio del problema en la dirección z y
)(eA es el área del elemento finito dada en el plano xy.
A partir de la Ecuación (2.13), el vector de fuerzas nodales equivalentes de superficie en el elemento )(e
sf , se puede expresar para problemas bidimensionales de la forma:
∫∫ ==Γ )()(
)()()()()(
ee L
e
T
ee
T
e
e
s dLtdS pNpNf (2.32)
donde el diferencial de superficie dS ha sido reemplazado por el producto entre el espe-sor t y el diferencial de longitud dL. La integral anterior está definida en las nc caras del elemento finito de longitud )()(
2)(
1)( e
nc
eee LLLL +++= L como lo indica la xxx, por lo tanto:
∑ ∫=
=
nc
c L
e
c
T
e
e
se
c
dLt1
)()(
)(
)(
pNf (2.33)
donde [ ]Te
yc
e
xc
e
c pp)()()( =p es el vector de fuerzas distribuidas por unidad de área aplicada
sobre la superficie definida por la cara c de longitud )(e
cL y el espesor t, mostrado en la xxx.

Análisis estructural mediante el método de los elementos finitos 23
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
El vector de fuerzas nodales equivalentes de cuerpo en el elemento )(e
bf se puede expre-sar en el espacio bidimensional como:
∫∫ ==)()(
)()()()()(
ee A
e
T
e
V
e
T
e
e
b dAtdV bNbNf (2.34)
donde el diferencial de volumen dV ha sido reemplazado por el producto entre el espe-sor t y el diferencial de área dA. Las componentes del vector de fuerzas másicas
[ ]Te
y
e
xe bb)()(
)( =b son las fuerzas distribuidas por unidad de volumen en dirección x y en y, como se indica en la xxx. El peso propio del material γ es el ejemplo más común de fuer-za másica, en cuyo caso el vector es de la forma [ ]Te γ−= 0)(b suponiendo que la direc-ción de la gravedad es –y.
De acuerdo con la Ecuación (2.13), el vector de fuerzas nodales equivalentes en el ele-mento finito es igual a:
)()()( e
b
e
s
e fff += (2.35)
Una forma alternativa para expresar las operaciones matriciales anteriores consiste en reescribir a las matrices elementales en términos de submatrices asociadas a cada nudo. La matriz de funciones de forma se puede expresar en términos de sus submatrices como:
[ ])()(2
)(1)(
e
n
ee
e NNNN L= (2.36)
donde la submatriz de funciones de forma del nudo i en el elemento e es igual a:
=
)(
)()(
0
0e
i
e
ie
iN
NN (2.37)
De igual manera, la matriz de operadores diferenciales actuando sobre las funciones de forma se reescribe como:
[ ])(3
)(2
)(1)(
eee
e BBBB L= (2.38)
donde la submatriz de operadores diferenciales actuando sobre funciones de forma del nudo i en el elemento e es igual a:
∂∂
∂
∂
=)()(
)(
)(
)( 0
0
e
ix
e
iy
e
iy
e
ix
e
i
NN
N
N
B (2.39)
El vector de desplazamientos nodales de un elemento finito se puede expresar en térmi-nos de subvectores asociados a cada nudo de la forma:
24 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
=
)(
)(2
)(1
)(
e
n
e
e
e
a
a
a
aM
(2.40)
donde el subvector )(e
ia contienen las componentes de desplazamiento en cada nudo, es decir:
=
)(
)()(
e
i
e
ie
iv
ua (2.41)
La matriz de rigidez del elemento finito )(eK definida en la Ecuación (2.31), se puede
expresar en términos de submatrices por nudo de la forma:
[ ]
∫
∫∫
=
==
)(
)()(
)()(
)()(1)(
)()(1)(
)(
)()(
)(2
)(2)(
)(2
)(1)(
)(2
)()(
)(1
)(2)(
)(1
)(1)(
)(1
)()(2
)(1)(
)(
)(2
)(1
)()()()(
e
ee
Ae
ne
Te
n
e
e
Te
n
e
e
Te
n
e
ne
Tee
e
Tee
e
Te
e
ne
Tee
e
Tee
e
Te
A
e
n
ee
e
Te
n
Te
Te
A
ee
T
e
e
dAt
dAtdAt
BDBBDBBDB
BDBBDBBDB
BDBBDBBDB
BBBD
B
B
B
BDBK
L
MMM
L
L
LM
(2.42)
es decir,
),,2,1,()(
)()(
)()(
)()(2
)(1
)(2
)(22
)(21
)(1
)(12
)(11
)(
njidAteA
e
je
Te
i
e
ij
e
nn
e
n
e
n
e
n
ee
e
n
ee
e
L
L
MMM
L
L
==
=
∫ BDBK
KKK
KKK
KKK
K
(2.43)
En la expresión anterior se observa que toda submatriz de rigidez )()( e
ji
e
ij KK = , demos-trando la simetría de la matriz de rigidez )(e
K . El vector de fuerzas nodales equivalentes de superficie indicado en la Ecuación (2.33) y
el vector de fuerzas nodales equivalentes de cuerpo dado en la Ecuación (2.34) se pueden escribir de la forma:

Análisis estructural mediante el método de los elementos finitos 25
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
∑ ∫=
=nc
c L
e
c
Te
n
e
c
Te
e
c
Te
e
se
c
dLt1
)()(
)()(2
)()(1
)(
)(
pN
pN
pN
fM
(2.44)
∫
=)(
)()(
)()(
2
)()(
1
)(
eA
e
Te
n
e
Te
e
Te
e
b dAt
bN
bN
bN
fM
(2.45)
es decir,
),,2,1(,)(
)()()(
1
)(
)(2
)(1
)(nidLt
ecL
e
c
Te
i
e
si
nc
c
e
sn
e
s
e
s
e
s LM
==
= ∫∑=
pNf
f
f
f
f (2.46)
),,2,1(,)(
)()()(
)(
)(2
)(1
)(nidAt
eA
e
Te
i
e
bi
e
bn
e
b
e
b
e
b LM
==
= ∫ bNf
f
f
f
f (2.47)
2.3. Elemento triangular lineal
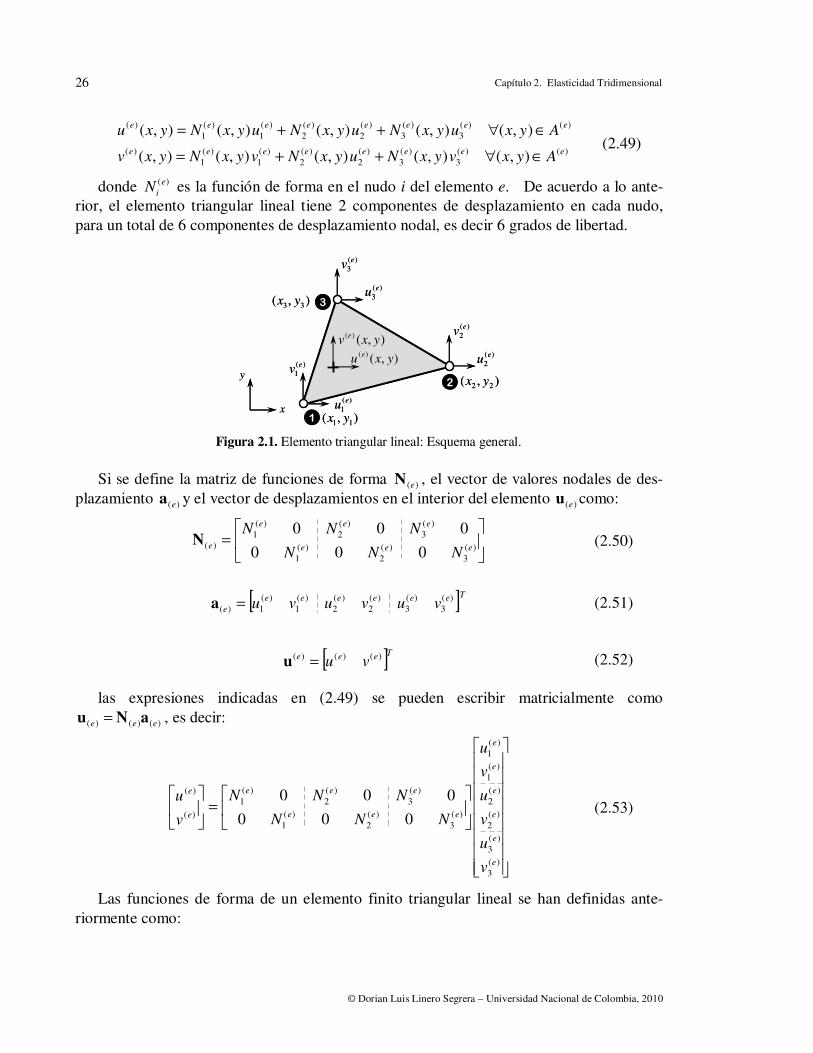
Sea el elemento finito triangular lineal definido por los nudos 1, 2 y 3 mostrado en la Figura 2.1, se pueden expresar las componentes de desplazamiento en x y en y de un punto (x,y) en el interior del elemento mediante funciones de aproximación polinómicas lineales de la forma:
)(654
)(
)(321
)(
),(),(
),(),(ee
ee
Ayxyxyxv
Ayxyxyxu
∈∀++=
∈∀++=
ααα
ααα (2.48)
Se definen los valores de las funciones de aproximación ),()( yxu e y ),()( yxv e en los nudos del elemento como )(e
iu y )(e
iv , es decir, las componentes del desplazamiento en x y en y, respectivamente, en el nudo i del elemento e.
Despejando a los coeficientes 61 ,, αα L o coordenadas generalizadas en función de los valores nodales )(e
iu y )(e
iv , las funciones de aproximación se pueden reescribir como:
26 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)(2e
u
x1
2
3
)(2e
v
)(1
eu
)(1
ev
)(3
eu
)(3
ev
y
),()(yxu
e
),()(yxv
e
),( 11 yx
),( 22 yx
),( 33 yx
)(2e
u
x1
2
3
)(2e
v
)(1
eu
)(1
ev
)(3
eu
)(3
ev
y
),()(yxu
e
),()(yxv
e
),( 11 yx
),( 22 yx
),( 33 yx
)()(3
)(3
)(2
)(2
)(1
)(1
)(
)()(3
)(3
)(2
)(2
)(1
)(1
)(
),(),(),(),(),(
),(),(),(),(),(eeeeeeee
eeeeeeee
AyxvyxNuyxNvyxNyxv
AyxuyxNuyxNuyxNyxu
∈∀++=
∈∀++= (2.49)
donde )(e
iN es la función de forma en el nudo i del elemento e. De acuerdo a lo ante-rior, el elemento triangular lineal tiene 2 componentes de desplazamiento en cada nudo, para un total de 6 componentes de desplazamiento nodal, es decir 6 grados de libertad.
Figura 2.1. Elemento triangular lineal: Esquema general.
Si se define la matriz de funciones de forma )(eN , el vector de valores nodales de des-
plazamiento )(ea y el vector de desplazamientos en el interior del elemento )(eu como:
=
)(3
)(2
)(1
)(3
)(2
)(1
)(000
000eee
eee
eNNN
NNNN (2.50)
[ ]Teeeeee
e vuvuvu)(
3)(
3)(
2)(
2)(
1)(
1)( =a (2.51)
[ ]Teee vu )()()( =u (2.52)
las expresiones indicadas en (2.49) se pueden escribir matricialmente como
)()()( eee aNu = , es decir:
=
)(3
)(3
)(2
)(2
)(1
)(1
)(3
)(2
)(1
)(3
)(2
)(1
)(
)(
000
000
e
e
e
e
e
e
eee
eee
e
e
v
u
v
u
v
u
NNN
NNN
v
u (2.53)
Las funciones de forma de un elemento finito triangular lineal se han definidas ante-riormente como:

Análisis estructural mediante el método de los elementos finitos 27
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
2,1,3),,(;1,3,2),,(;3,2,1),,(
,,
)(2
1),( )(
)(
===
−=−=−=
++=
kjikjikji
xxcyybyxyxa
ycxbaA
yxN
jkikjijkkji
iiie
e
i
(2.54)
es decir,
12321312213
31213231132
23132123321
333)()(
3
222)()(
2
111)()(
1
,,
,,
,,
)(2
1),(
)(2
1),(
)(2
1),(
xxcyybyxyxa
xxcyybyxyxa
xxcyybyxyxa
ycxbaA
yxN
ycxbaA
yxN
ycxbaA
yxN
e
e
e
e
e
e
−=−=−=
−=−=−=
−=−=−=
++=
++=
++=
(2.55)
Las componentes de deformación en el interior de un elemento presentadas en la Ecua-ción (2.27), dependen de un operador diferencial actuando sobre las funciones de forma
),()( yxeB expresado como:
∂∂∂∂∂∂
∂∂∂
∂∂∂
=)(
3)(
3)(
2)(
2)(
1)(
1
)(3
)(2
)(1
)(3
)(2
)(1
)( 000
000
),(e
x
e
y
e
x
e
y
e
x
e
y
e
y
e
y
e
y
e
x
e
x
e
x
e
NNNNNN
NNN
NNN
yxB (2.56)
cuyos términos corresponden a las derivadas de las funciones de forma con respecto a x y a y, como se indica a continuación:
=
332211
321
321
)()( 000
000
2
1
bcbcbc
ccc
bbb
AeeB (2.57)
Observación. En general, la matriz de operadores diferenciales actuando sobre
funciones de forma es función de la posición en el interior del elemento (x,y), sin
embargo en el elemento triangular lineal en particular la matriz )(eB es constante
con respecto a (x,y), porque sus términos son derivadas de funciones lineales.
De acuerdo con lo anterior, la matriz columna de la deformación definida como
)()()( eee aBε = , se pueden expresar en el interior de un elemento finito triangular lineal de la forma:

28 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
=
)(3
)(3
)(2
)(2
)(1
)(1
332211
321
321
)()(
)(
)(
000
000
21
e
e
e
e
e
e
e
e
xy
e
yy
e
xx
v
u
v
u
v
u
bcbcbc
ccc
bbb
Aγ
ε
ε
(2.58)
Observación. En un elemento triangular lineal la matriz de operadores diferencia-
les y el vector de valores nodales es constante con respecto a la posición (x,y), por
lo tanto las componentes de deformación son las mismas en cualquier punto del in-
terior del elemento finito. Por esta razón los elementos triangulares lineales tam-
bién son llamados elementos de deformación constante.
La matriz columna de las componentes de esfuerzo se obtiene de la multiplicación entre la matriz de constitutiva elástica )(eD indicada en la Ecuación (2.30) y la matriz columna de las componentes de deformación indicada en la ecuación anterior, es decir )()()( eee εDσ = . Al igual que las deformaciones los esfuerzos son constantes en el interior de un elemento triangular lineal.
Una forma alternativa de expresar las operaciones anteriores consiste en definir subma-trices asociadas a cada uno de los nudos en las matrices elementales, de tal manera que la submatriz de funciones de forma del nudo i en el elemento e es igual a:
)(2
1,
0
0)(
)(
)(
)()(
ycxbaA
NN
Niiie
e
ie
i
e
ie
i ++=
=N (2.59)
la submatriz de operadores diferenciales actuando sobre las funciones de forma del for-ma del nudo i en el elemento e es igual a:
=
∂∂
∂
∂
=
ii
i
i
e
e
ix
e
iy
e
iy
e
ix
e
i
bc
c
b
ANN
N
N
0
0
2
10
0
)()()(
)(
)(
)(B (2.60)
y el subvector de desplazamientos en el nudo i del elemento e corresponde a:
=
)(
)()(
e
i
e
ie
iv
ua (2.61)
Por lo tanto la matriz de funciones de forma, la matriz )(eB y el vector de desplazamien-tos nodales de un elemento triangular lineal se pueden escribir en términos de sus submatri-ces como:

Análisis estructural mediante el método de los elementos finitos 29
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
[ ] [ ]
===)(
3
)(2
)(1
)()(
3)(
2)(
1)()(
3)(
2)(
1)( ,,e
e
e
e
eee
e
eee
e
a
a
a
aBBBBNNNN (2.62)
La matriz de rigidez de un elemento triangular lineal )(eK se obtiene al sustituir las
Ecuaciones (2.57) y (2.30) en la expresión (2.31) y después de realizar el triple producto matricial como se indica a continuación:
=
== ∫
332211
321
321
)(33
)(11
)(12
)(12
)(11
33
33
22
22
11
11
)()(
)()()()()()()(
)(
000
000
00
0
0
0
0
0
0
0
0
4
)(
bcbcbc
ccc
bbb
D
DD
DD
bc
cb
bc
cb
bc
cb
A
t
AtdAt
e
ee
ee
e
e
e
ee
T
e
A
ee
T
e
e
e
K
BDBBDBK
(2.63)
Como se indicó en la Ecuación (2.43), la matriz de rigidez del elemento también puede expresarse en términos de submatrices asociadas a los nudos de la forma:
++
++=
=
==
=
∫
)()(
)()(
4
0
0
00
0
0
0
0
4
)3,2,1,(
)(22
)(33
)(33
)(12
)(33
)(12
)(33
)(11
)()(
)(33
)(11
)(12
)(12
)(11
)()(
)()(
)()(
)(33
)(23
)(22
)(13
)(12
)(11
)(
)(
e
ji
e
ji
e
ji
e
ji
e
ji
e
ji
e
ji
e
ji
e
e
ij
jj
j
j
e
ee
ee
ii
ii
e
e
ij
A
e
je
Te
i
e
ij
e
ee
eee
e
DccDbbDcbDbc
DbcDcbDccDbb
A
t
bc
c
b
D
DD
DD
bc
cb
A
t
jidAt
sim
e
K
K
BDBK
K
KK
KKK
K
(2.64)
El vector de fuerzas nodales equivalentes de superficie sobre los lados )(13
)(23
)(12 ,, eee LLL de
un elemento triangular lineal es igual a:

30 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
∫∫∫
∫∫∫∑ ∫
+
+
=
++=
=
−
−
−
−
−
−
−−−=
)(13
)(23
)(12
)(13
)(23
)(12
)(
)(31
)(31
)(3
)(3
)(2
)(2
)(1
)(1
)(32
)(32
)(3
)(3
)(2
)(2
)(1
)(1
)(21
)(21
)(3
)(3
)(2
)(2
)(1
)(1
)(31)(
)(32)(
)(21)(
1
)()(
)(
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
eee
eeeec
L
e
y
e
x
e
e
e
e
e
e
L
e
y
e
x
e
e
e
e
e
e
L
e
y
e
x
e
e
e
e
e
e
L
eT
e
L
eT
e
L
eT
e
nc
c L
e
c
T
e
e
s
dLtp
p
N
N
N
N
N
N
dLtp
p
N
N
N
N
N
N
dLtp
p
N
N
N
N
N
N
dLtdLtdLtdLt pNpNpNpNf
(2.65)
donde [ ]Te
jiy
e
jix
e
ji pp)(
)()(
)()(
−−− =p corresponde al vector de fuerzas distribuidas por unidad de área actuante sobre el lado i – j del elemento finito. La Figura 2.2 muestra las fuerzas nodales equivalentes a la acción de las presiones en x y en y sobre la cara 2 – 3.
Figura 2.2. Elemento triangular lineal: Fuerzas nodales equivalentes de superficie en la cara (2-3) del elemento.
Utilizando las submatrices de las funciones de forma por nudo, la ecuación anterior se
puede expresar como:
))31(),32(),21(()3,2,1(,)(
)()()(
1 )(3
)(2
)(1
)( −−−===
= ∫∑=
cidLte
cL
e
c
Te
i
e
si
nc
c e
s
e
s
e
s
e
s pNf
f
f
f
f (2.66)
Las coordenadas de área de un triangulo ),(),,(),,( 321 yxlyxlyxl coinciden con las fun-ciones de forma de un elemento triangular lineal ),(),,(),,( )(
3)(
2)(
1 yxNyxNyxN eee , respecti-vamente. Tal característica permite obtener la integral del producto de las funciones de forma en el área del elemento finito mediante la siguiente expresión propuesta por Eisen-berg y Malvern en 1973:
x1
2
3
y
)()32(
e
xp −
)()32(
e
yp −
)(2
e
bxf
1
2
3
)(2
e
byf
)(3e
bxf
)(3
e
byf
1
2
3
)(23e
L
x1
2
3
y
)()32(
e
xp −
)()32(
e
yp −
)(2
e
bxf
1
2
3
)(2
e
byf
)(3e
bxf
)(3
e
byf
1
2
3
)(23e
L

Análisis estructural mediante el método de los elementos finitos 31
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)(321321 2
)!2(
!!!)()(
ecb
A
acb
A
a Acba
cbadANNNdAlll
ee +++== ∫∫ (2.67)
Asimismo, la integral de línea de las funciones de forma sobre cada lado del elemento se evalúa mediante la expresión presentada por Abramowitz & Stegun en 1964, de la for-ma:
)(
)!1(
!!)()(
e
ij
b
jL
a
i
b
jL
a
i Lba
badLNNdLll
eij
eij ++
== ∫∫ (2.68)
De acuerdo a lo anterior, la integral de la función de forma del nudo i cualquiera de un elemento triangular lineal e en el área es igual a:
3
)()(
)(
e
A
e
i
AdAN
e=∫ (2.69)
La integral de la función de forma en el nudo i o en el nudo j sobre el lado i – j de un elemento triangular lineal e es igual a:
2
)(
)()(
e
ij
Lj
Li
LdANdAN
eij
eij
== ∫∫ (2.70)
La función de forma en el nudo k que no pertenece a el lado i – j es igual a cero por de-finición.
Después de sustituir las funciones de forma dadas en la Ecuación (2.54) e integrar en la longitud de cada lado del elemento finito se obtiene un vector de fuerzas nodales equivalen-tes de superficie de la forma:
+
+
=
−
−
−
−
−
−
−
−
−
−
−
−
)()31(
)()31(
)()31(
)()31(
)(132
1
)()32(
)()32(
)()32(
)()32()(
2321
)()21(
)()21(
)()21(
)()21(
)(122
1)(
0
0
0
0
0
0e
y
e
y
e
y
e
x
e
e
x
e
x
e
y
e
xe
e
y
e
x
e
y
e
x
ee
s
p
p
p
p
tL
p
p
p
ptL
p
p
p
p
tLf (2.71)
El vector de fuerzas nodales equivalentes de cuerpo de un elemento triangular lineal es de la forma:
∫∫
==)()(
)(
)(
)(3
)(3
)(2
)(2
)(1
)(1
)()()(
0
0
0
0
0
0
ee A
e
y
e
x
e
e
e
e
e
e
A
e
T
e
e
b dLtb
b
N
N
N
N
N
N
dAtbNf (2.72)
32 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
x1
2
3
y
)(ex
b)(e
yb
)(2
e
bxf
1
2
3
)(2
e
byf
)(1e
bxf
)(1e
yf
)(3e
bxf
)(3e
byf
1
2
3
x1
2
3
y
)(ex
b)(e
yb
)(2
e
bxf
1
2
3
)(2
e
byf
)(1e
bxf
)(1e
yf
)(3e
bxf
)(3e
byf
1
2
3
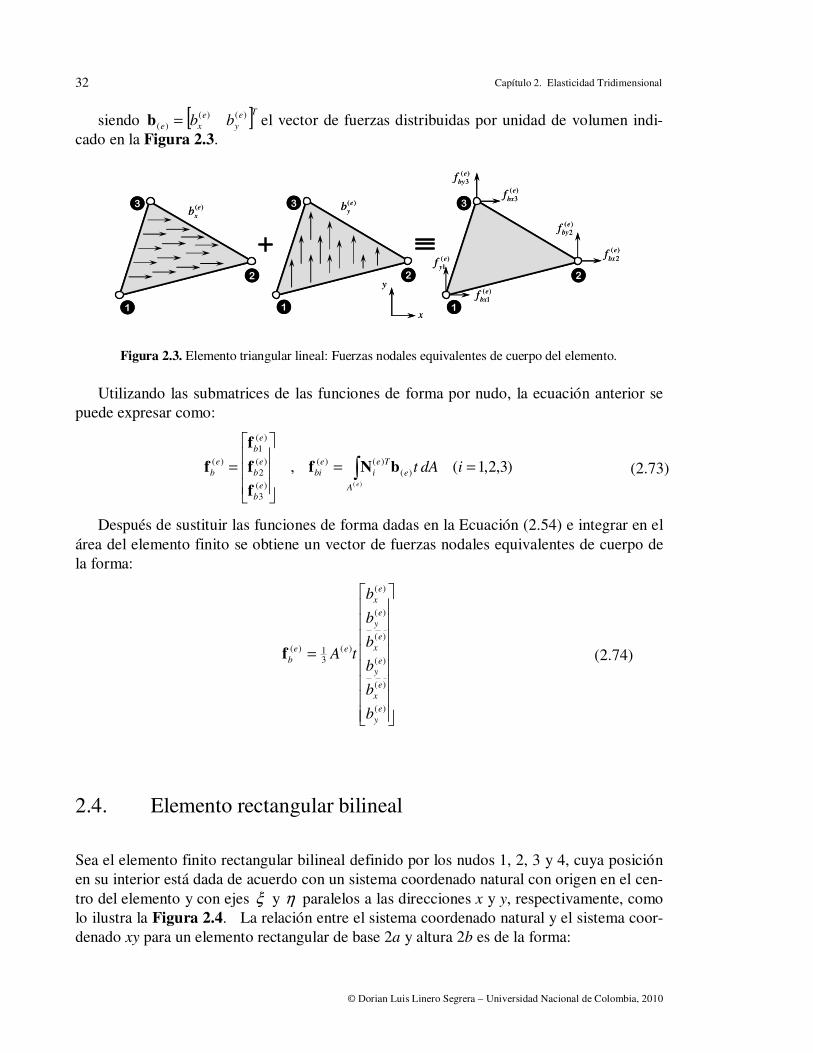
siendo [ ]Te
y
e
xe bb)()(
)( =b el vector de fuerzas distribuidas por unidad de volumen indi-cado en la Figura 2.3.
Figura 2.3. Elemento triangular lineal: Fuerzas nodales equivalentes de cuerpo del elemento.
Utilizando las submatrices de las funciones de forma por nudo, la ecuación anterior se
puede expresar como:
)3,2,1(,)(
)()()(
)(3
)(2
)(1
)( ==
= ∫ idAteA
e
Te
i
e
bi
e
b
e
b
e
b
e
b bNf
f
f
f
f (2.73)
Después de sustituir las funciones de forma dadas en la Ecuación (2.54) e integrar en el área del elemento finito se obtiene un vector de fuerzas nodales equivalentes de cuerpo de la forma:
=
)(
)(
)(
)(
)(
)(
)(31)(
e
y
e
x
e
y
e
x
e
y
e
x
ee
b
b
b
b
b
b
b
tAf (2.74)
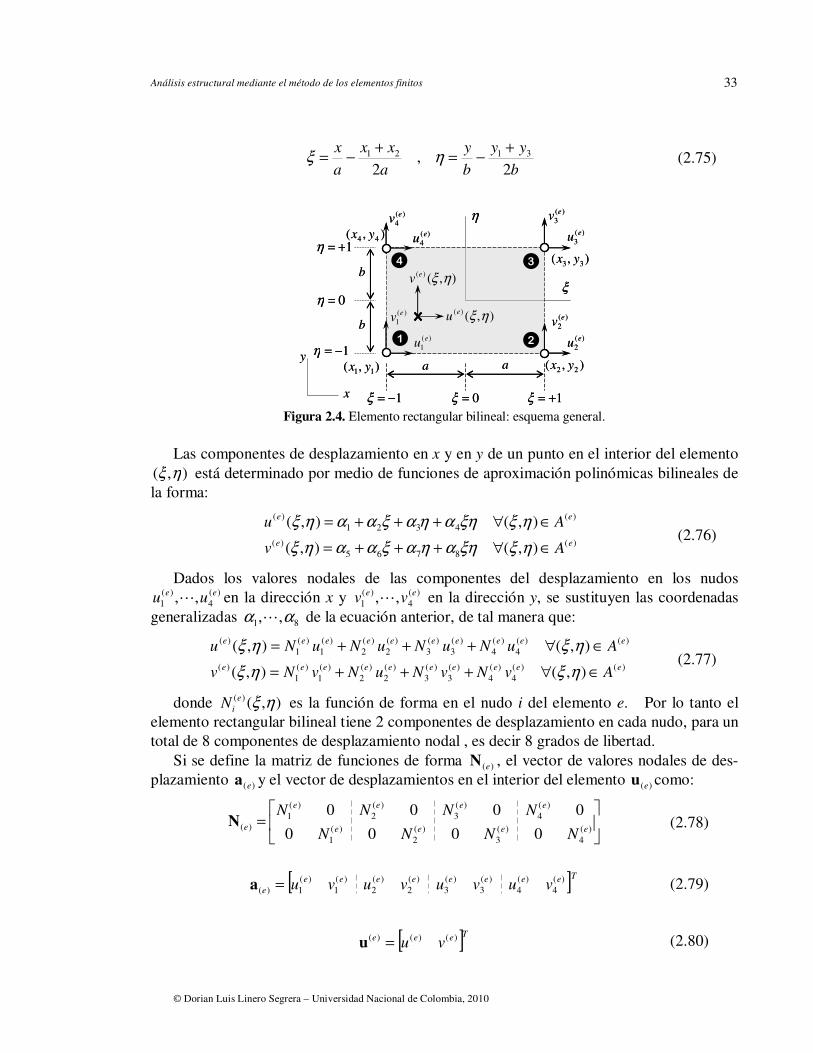
2.4. Elemento rectangular bilineal
Sea el elemento finito rectangular bilineal definido por los nudos 1, 2, 3 y 4, cuya posición en su interior está dada de acuerdo con un sistema coordenado natural con origen en el cen-tro del elemento y con ejes ξ y η paralelos a las direcciones x y y, respectivamente, como lo ilustra la Figura 2.4. La relación entre el sistema coordenado natural y el sistema coor-denado xy para un elemento rectangular de base 2a y altura 2b es de la forma:
Análisis estructural mediante el método de los elementos finitos 33
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)(2e
u
x
1 2
3
)(2e
v
)(1
eu
)(1
ev
)(4e
u
)(4e
v
y
),()( ηξeu
),()( ηξev
),( 11 yx ),( 22 yx
),( 33 yx
)(3
eu
)(3ev
a a
b
b
ξ
η
1+=ξ
1−=η
1−=ξ
1+=η
0=η
0=ξ
4
),( 44 yx
)(2e
u
x
1 2
3
)(2e
v
)(1
eu
)(1
ev
)(4e
u
)(4e
v
y
),()( ηξeu
),()( ηξev
),( 11 yx ),( 22 yx
),( 33 yx
)(3
eu
)(3ev
a a
b
b
ξ
η
1+=ξ
1−=η
1−=ξ
1+=η
0=η
0=ξ
4
),( 44 yx
b
yy
b
y
a
xx
a
x
2,
23121 +
−=+
−= ηξ (2.75)
Figura 2.4. Elemento rectangular bilineal: esquema general.
Las componentes de desplazamiento en x y en y de un punto en el interior del elemento
),( ηξ está determinado por medio de funciones de aproximación polinómicas bilineales de la forma:
)(8765
)(
)(4321
)(
),(),(
),(),(ee
ee
Av
Au
∈∀+++=
∈∀+++=
ηξξηαηαξααηξ
ηξξηαηαξααηξ (2.76)
Dados los valores nodales de las componentes del desplazamiento en los nudos )(
4)(
1 ,, ee uu L en la dirección x y )(4
)(1 ,, ee vv L en la dirección y, se sustituyen las coordenadas
generalizadas 81 ,, αα L de la ecuación anterior, de tal manera que:
)()(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(
)()(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(
),(),(
),(),(eeeeeeeeee
eeeeeeeeee
AvNvNuNvNv
AuNuNuNuNu
∈∀+++=
∈∀+++=
ηξηξ
ηξηξ (2.77)
donde ),()( ηξe
iN es la función de forma en el nudo i del elemento e. Por lo tanto el elemento rectangular bilineal tiene 2 componentes de desplazamiento en cada nudo, para un total de 8 componentes de desplazamiento nodal , es decir 8 grados de libertad.
Si se define la matriz de funciones de forma )(eN , el vector de valores nodales de des-plazamiento )(ea y el vector de desplazamientos en el interior del elemento )(eu como:
=
)(4
)(3
)(2
)(1
)(4
)(3
)(2
)(1
)(0000
0000eeee
eeee
eNNNN
NNNNN (2.78)
[ ]Teeeeeeee
e vuvuvuvu)(
4)(
4)(
3)(
3)(
2)(
2)(
1)(
1)( =a (2.79)
[ ]Teee vu )()()( =u (2.80)

34 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
Las dos funciones de aproximación del campo del desplazamiento indicadas en la Ecua-ción (2.77) se pueden escribir de forma matricial como )()()( eee aNu = , es decir:
=
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(4
)(3
)(2
)(1
)(4
)(3
)(2
)(1
)(
)(
0000
0000
e
e
e
e
e
e
e
e
eeee
eeee
e
e
v
u
v
u
v
u
v
u
NNNN
NNNN
v
u (2.81)
Las funciones de forma de un elemento finito rectangular bilineal definidas anterior-mente en un sistema coordenado natural son:
)1)(1(41
),(,)1)(1(41
),(
)1)(1(4
1),(,)1)(1(
4
1),(
)(4
)(3
)(2
)(1
ηξηξηξηξ
ηξηξηξηξ
+−=++=
−+=−−=
ee
ee
NN
NN
(2.82)
Las componentes de deformación en el interior de un elemento presentadas en la Ecua-ción (2.27), dependen de un operador diferencial actuando sobre las funciones de forma
),()( yxeB expresado como:
∂∂∂∂∂∂∂∂
∂∂∂∂
∂∂∂∂
=)(
4)(
4)(
3)(
3)(
2)(
2)(
1)(
1
)(4
)(3
)(2
)(1
)(4
)(3
)(2
)(1
)( 0000
0000
),(e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
y
e
y
e
y
e
y
e
x
e
x
e
x
e
x
e
NNNNNNNN
NNNN
NNNN
yxB
(2.83)
cuyos términos corresponden a las derivadas de las funciones de forma con respecto a x y a y. De acuerdo con la Ecuación (2.75) y con la regla de la cadena dichas derivadas se pueden expresar como:
b
N
y
N
y
N
y
N
a
N
x
N
x
N
x
N
e
i
e
i
e
i
e
i
e
i
e
i
e
i
e
i
1
1
)()()()(
)()()()(
η
η
η
ξ
ξ
ξ
η
η
ξ
ξ
∂
∂=
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂
∂
∂=
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂
(2.84)
En consecuencia la matriz de operadores diferenciales actuando sobre funciones de forma de un elemento rectangular bilineal es:

Análisis estructural mediante el método de los elementos finitos 35
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
+−−++
−+
+−+
−+−−−−−
+−−−
−−−
=
)1()1()1()1(
)1(0)1(0
0)1(0)1(
)1()1()1()1(
)1(0)1(0
0)1(0)1(
4
1)(
ηξηξ
ξξ
ηη
ηξηξ
ξξ
ηη
baba
aa
bb
baba
aa
bb
abeB
(2.85)
La matriz columna de la deformación en un punto ),( ηξ en el interior de un elemento finito rectangular bilineal es el resultado del producto entre la matriz de operadores diferen-ciales actuando sobre funciones de forma de la Ecuación (2.85) y el vector de desplaza-mientos nodales de la Ecuación (2.79), es decir )()()( ),(),( eee aBε ηξηξ = .
La matriz columna del esfuerzo en el mismo punto ),( ηξ se obtiene multiplicando a la matriz constitutiva elástica del material dada en la Ecuación (2.30) por la matriz columna de la deformación, es decir, ),(),( )()()( ηξηξ eee εDσ = .
Una forma alternativa de expresar las operaciones anteriores consiste en definir subma-trices asociadas a cada uno de los nudos en las matrices elementales. La matriz de funcio-nes de forma se puede expresar como:
[ ]
==
)(
)()()(
4)(
3)(
2)(
1)(0
0,
e
i
e
ie
i
eeee
eN
NNNNNNN (2.86)
donde las funciones de forma )(e
iN dadas en la Ecuación (2.82) se pueden escribir de manera general como:
114
113
112
111
)1)(1(41
),(
)()(
)()()(
+−
++
−+
−−
++=
ηξ
ηξ ηξηξ
ii
ii
e
i
ssi
ssN (2.87)
Asimismo, la matriz de operadores diferenciales actuando sobre las funciones de forma se reescribe como:
[ ]
∂∂
∂
∂
==)()(
)(
)(
)()(4
)(3
)(2
)(1)( 0
0
,e
ix
e
iy
e
iy
e
ix
e
i
eeee
e
NN
N
N
BBBBBB (2.88)
donde las derivadas de la función de forma con respecto a x y a y son:

36 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)1(4
,)1(4
)()()(
)()()(
ξη ξη
ηξ
ii
e
ii
i
e
i sb
s
y
Ns
a
s
x
N+=
∂
∂+=
∂
∂ (2.89)
Por lo tanto, la submatriz de operadores diferenciales actuando sobre las funciones de forma en el nudo i del elemento e es igual a:
++
+
+
=
)1()1(
)1(0
0)1(
41
)()()()(
)()(
)()(
)(
ηξ
ξ
η
ηξξη
ξη
ηξ
iiii
ii
ii
e
i
sbssas
sas
sbs
abB (2.90)
El vector de desplazamientos nodales de un elemento finito se puede expresar en térmi-nos de subvectores asociados a cada nudo de la forma:
=
=)(
)()(
)(4
)(3
)(2
)(1
)( ,e
i
e
ie
i
e
e
e
e
ev
ua
a
a
a
a
a (2.91)
La matriz de rigidez del elemento finito )(eK definida en la Ecuación (2.31), se puede
expresar en términos de submatrices por nudo de la forma:
)4,3,2,1,()(
)()(
)()(
)(44
)(34
)(33
)(24
)(23
)(22
)(14
)(13
)(12
)(11
)(
==
=
∫ jidAt
sim
eA
e
je
Te
i
e
ij
e
ee
eee
eeee
e
BDBK
K
KK
KKK
KKKK
K
(2.92)
Recordando la relación entre sistemas coordenados, el diferencial de área dA expresado en función de las coordenadas naturales de obtiene así:
ηξ
ηη
η
ξξ
ξ
ddabdxdydA
dbdybdy
d
b
yy
b
y
dadxadx
d
a
xx
a
x
==
=→=→+
−=
=→=→+
−=
12
1
2
21
21
(2.93)
En consecuencia, la submatriz )(e
ijK corresponde a una integral en el área con respecto al sistema coordenado natural de la forma:
)4,3,2,1,(1
1
1
1
)()(
)()( == ∫ ∫+
−
+
−jiddabt
e
je
Te
i
e
ij ηξBDBK (2.94)
Sustituyendo las ecuaciones (2.30) y (2.90) en la expresión anterior se tiene que:

Análisis estructural mediante el método de los elementos finitos 37
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)1()(,)1()(
)1()(,)1()(
)()(
)(0
0)(
00
0
0
)()(0
)(0)(
16
)()()()(
)()()()(
)(33
)(22
)(12
)(12
)(111
1
1
1
)(
ξξηη
ξξηη
ηξ
ηξ
ξ
η
ηξ
ξη
ξηηξ
ξηηξ
jjjjjj
iiiiii
jj
j
j
e
ee
ee
ii
iie
ij
sasgsbsh
sasgsbsh
dd
hg
g
h
D
DD
DD
hg
gh
ab
t
+=+=
+=+=
= ∫ ∫
+
−
+
−
K
(2.95)
Realizando el triple producto,
ηξ ddDggDhhDghDhg
DhgDghDggDhh
ab
te
ji
e
ji
e
ji
e
ji
e
ji
e
ji
e
ji
e
jie
ij
++
++= ∫ ∫
+
−
+
−)()(
)()(
16 )(22
)(33
)(33
)(12
)(33
)(12
)(33
)(11
1
1
1
1
)(K
(2.96)
Integrando en los límites dados por el sistema coordenado natura se obtiene:
)()()()()()(
)(22
2)()()()(33
2)()()()(33
)()()(12
)()(
)(33
)()()(12
)()()(33
2)()()()(11
2)()()()(
3,3
)()33(
)33()(
12
ξξξηηη
ξηηηξξηξηξ
ηξηξξηηηξξ
jiijjiij
e
ijji
e
ijji
e
ji
e
ij
e
ij
e
ji
e
ijji
e
ijjie
ij
ssrssr
DarssDbrssabDssabDss
abDssabDssDarssDbrss
ab
t
+=+=
++
++=K
(2.97)
En conclusión la matriz de rigidez de un elemento rectangular bilineal en términos de sus submatrices por nudo es igual a:

38 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
x
1 2
3
y
)()32(
e
xp −
)()32(
e
yp −
a a
b
b
ξ
η
4
)(2e
sxf1 2
3
)(2e
syf
)(3e
sxf
)(3e
syf
ξ
η
4
)(12e
L
)(23eL
)(34e
L
)(14e
L
x
1 2
3
y
)()32(
e
xp −
)()32(
e
yp −
a a
b
b
ξ
η
4
)(2e
sxf1 2
3
)(2e
syf
)(3e
sxf
)(3e
syf
ξ
η
4
)(12e
L
)(23eL
)(34e
L
)(14e
L
=
====
−−+
+−−=
−+−
−−=
+−−
−−+=
−−
+−−=
−−−−
−−−−=
+−+−
−+−=
++
++=
)(44
)(34
)(33
)(24
)(23
)(22
)(14
)(13
)(12
)(11
)(
)()()(22
)(44
)(12
)(34
)(11
)(33
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
24
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
23
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
22
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
14
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
13
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
12
)(22
2)(33
2)(33
)(12
)(33
)(12
)(33
2)(11
2)(
11
,,,
)22()33(
)33()22(
12
)42()33(
)33()42(
12
)44()33(
)33()44(
12
)42()33(
)33()42(
12
)22()33(
)33()22(
12
)24()33(
)33()24(
12
)44()33(
)33()44(
12
e
ee
eee
eeee
e
e
ji
e
ij
eeeeee
eeee
eeee
e
eeee
eeee
e
eeee
eeee
e
eeee
eeee
e
eeee
eeee
e
eeee
eeee
e
eeee
eeee
e
sim
DaDbabDabD
abDabDDaDb
ab
t
DaDbabDabD
abDabDDaDb
ab
t
DaDbabDabD
abDabDDaDb
ab
t
DaDbabDabD
abDabDDaDb
ab
t
DaDbsabDabD
abDabDDaDb
ab
t
DaDbabDabD
abDabDDaDb
ab
t
DaDbabDabD
abDabDDaDb
ab
t
K
KK
KKK
KKKK
K
KKKKKKKK
K
K
K
K
K
K
K
(2.98)
Figura 2.5. Elemento rectangular bilineal: fuerzas nodales equivalentes de superficie sobre el lado (2-3) del elemento.
La Figura 2.5 ilustra las fuerzas nodales equivalentes generada por las presiones en x y
en y sobre el lado 2 – 3 del elemento finito.

Análisis estructural mediante el método de los elementos finitos 39
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
El vector de fuerzas nodales equivalentes de superficie sobre los lados )(14
)(34
)(23
)(12 ,,, eeee LLLL
de un elemento rectangular bilineal, es igual a:
∫∫∫∫∑ ∫ −−−−=
+++=
=
)(14
)(34
)(23
)(12
)(
)(41)(
)(43)(
)(32)(
)(21)(
1
)()(
)(
eeeeec L
eT
e
L
eT
e
L
eT
e
L
eT
e
nc
c L
e
c
T
e
e
s dLtdLtdLtdLtdLt pNpNpNpNpNf
(2.99)
donde,
=
=
=
=
=
−
−
−
−
−
−
−
−
−
−
−
−
)(41
)(41)(
41)(43
)(43)(
43
)(32
)(32)(
32)(21
)(21)(
21
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(
,
,
,
0
0
0
0
0
0
0
0
e
y
e
xe
e
y
e
xe
e
y
e
xe
e
y
e
xe
e
e
e
e
e
e
e
e
T
e
p
p
p
p
p
p
p
p
N
N
N
N
N
N
N
N
pp
pp
N
(2.100)
Utilizando las submatrices de las funciones de forma por nudo, la ecuación anterior se puede expresar como:
−−−−=
==
= ∫∑= )41(),43(),32(),21(
4,3,2,1,
)(
)()()(
1
)(4
)(3
)(2
)(1
)(
c
idLt
ecL
e
c
Te
i
e
si
nc
c
e
s
e
s
e
s
e
s
e
s pNf
f
f
f
f
f (2.101)
Como lo muestra la Figura 2.5, los lados (1–2) y (3–4) del elemento rectangular bili-neal son paralelos al eje coordenado x, por lo tanto las integrales de línea de las funciones de forma sobre dichos lados se puede expresar en términos de x. Sin embargo, dado que las funciones de forma presentadas en la Ecuación (2.54), están expresadas en términos del sistema coordenado natural, la integral de línea en función de ξ se puede obtener así:
2)1()1)(1(
4
),(
)(1
1
)()(
1
1
)()()()( 2
1)(34
)(12
atsdss
at
datNdxtNdLtNdLtN
iii
e
i
x
x
e
i
L
e
i
L
e
iee
ηξηξ
ξηξ
ηηξ +=++=
===
∫
∫∫∫∫
+
−
+
−
(2.102)
Las integrales de línea de las funciones de forma sobre el lado (1–2), cuya coordenada natural 1−=η corresponden a:
40 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
0,0,,)(
12)(
12)(
12)(
12
)(4
)(3
)(2
)(1 ==== ∫∫∫∫
eeeeL
e
L
e
L
e
L
e dLtNdLtNatdLtNatdLtN (2.103)
Las integrales de línea de las funciones de forma sobre el lado (3–4), cuya coordenada natural 1+=η corresponden a:
tadLtNtadLtNdLtNdLtNeeee
L
e
L
e
L
e
L
e ==== ∫∫∫∫)(
34)(
34)(
34)(
34
)(4
)(3
)(2
)(1 ,,0,0
(2.104)
Asimismo, los lados (2–3) y (1–4) del elemento rectangular bilineal son paralelos al eje coordenado y, por lo tanto las integrales de línea de las funciones de forma sobre dichos lados se puede expresar en términos de y. Sin embargo, dado que las funciones de forma presentadas en la Ecuación (2.54), están expresadas en términos del sistema coordenado natural, la integral de línea en función de η se puede obtener así:
2)1()1)(1(
4
),(
)(1
1
)()(
1
1
)()()()( 3
2)(14
)(23
btsdss
bt
dbtNdytNdLtNdLtN
iii
e
i
y
y
e
i
L
e
i
L
e
iee
ξηηξ
ηηξ
ξηξ +=++=
===
∫
∫∫∫∫
+
−
+
−
(2.105)
Las integrales de línea de las funciones de forma sobre el lado (2–3), cuya coordenada natural 1+=ξ corresponden a:
0,,,0)(
23)(
23)(
23)(
23
)(4
)(3
)(2
)(1 ==== ∫∫∫∫
eeeeL
e
L
e
L
e
L
edLtNbtdLtNbtdLtNdLtN
(2.106)
Las integrales de línea de las funciones de forma sobre el lado (1–4), cuya coordenada natural 1−=ξ corresponden a:
tbdLtNdLtNdLtNtbdLtNeeee
L
e
L
e
L
e
L
e ==== ∫∫∫∫)(
14)(
14)(
14)(
14
)(4
)(3
)(2
)(1 ,0,0, (2.107)
Después de sustituir las integrales de línea de las funciones de forma se obtiene un vec-tor de fuerzas nodales equivalentes de superficie igual a:
+
+
+
=
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
)()41(
)()41(
)()41(
)()41(
)()43(
)()43(
)()43(
)()43(
)()32(
)()32(
)()32(
)()32(
)()21(
)()21(
)()21(
)()21(
)(
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
s
p
p
p
p
tb
p
p
p
pta
p
p
p
p
tbp
p
p
p
taf (2.108)
El vector de fuerzas nodales equivalentes de cuerpo de un elemento rectangular bilineal es de la forma:

Análisis estructural mediante el método de los elementos finitos 41
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
1 2
3
)(e
yb
)(e
xb
a a
b
b
ξ
η
4
)(2
e
bxf1 2
3
)(2
e
byf
)(1e
bxf
)(1e
byf
)(4
e
bxf
)(4
e
byf)(
3e
bxf
)(3e
byf
ξ
η
4
x
y1 2
3
)(e
yb
)(e
xb
a a
b
b
ξ
η
4
)(2
e
bxf1 2
3
)(2
e
byf
)(1e
bxf
)(1e
byf
)(4
e
bxf
)(4
e
byf)(
3e
bxf
)(3e
byf
ξ
η
4
x
y
∫∫
==)()(
)(
)(
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)()()(
0
0
0
0
0
0
0
0
ee A
e
y
e
x
e
e
e
e
e
e
e
e
A
e
T
e
e
b dLtb
b
N
N
N
N
N
N
N
N
dAtbNf (2.109)
siendo [ ]Te
y
e
xe bb)()(
)( =b el vector de fuerzas distribuidas por unidad de volumen indi-cado en la Figura 2.6.
Figura 2.6. Elemento rectangular bilineal: fuerzas nodales equivalentes de cuerpo sobre el elemen-to.
Utilizando las submatrices de las funciones de forma por nudo, la ecuación anterior se
puede expresar como:
)4,3,2,1(,)(
)()()(
)(4
)(3
)(2
)(1
)( ==
= ∫ idAteA
e
Te
i
e
bi
e
b
e
b
e
b
e
b
e
b bNf
f
f
f
f
f (2.110)
La integral en el área de la función de forma del nudo i del elemento finito e presentada en la Ecuación (2.54), se pueden evaluar en términos del sistema coordenado natural como:
tabddsstab
ddabtNdAtN
ii
e
i
A
e
ie
=++=
=
∫ ∫
∫ ∫∫+
−
+
−
+
−
+
−
1
1
1
1
)()(
1
1
1
1
)()(
)1)(1(4
),()(
ηξηξ
ηξηξ
ηξ
(2.111)
Después de sustituir las integrales de las funciones de forma en el área del elemento fi-nito se obtiene un vector de fuerzas nodales equivalentes de cuerpo de la forma:

42 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
=
)(
)(
)(
)(
)(
)(
)(
)(
)(
e
y
e
x
e
y
e
x
e
y
e
x
e
y
e
x
e
b
b
b
b
b
b
b
b
b
tabf (2.112)
2.5. Esfuerzos y deformaciones iniciales
Adicionalmente a las acciones externas aplicadas consideradas en los apartados anteriores, el sólido también podría estar sometido a esfuerzos y a deformaciones iniciales como por ejemplo, los esfuerzos causados pretensionamiento o las deformaciones generadas por cambios de temperatura. Para este último caso, la matriz columna de la deformación ini-cial causada por un cambio de la temperatura T∆ en problemas tridimensionales es igual a:
[ ]TTTT 0000 ∆∆∆= αααε (2.113)
donde α es el coeficiente de dilatación térmica del material. Si el problema se puede simplificar a condición plana de esfuerzos o a condición plana de deformaciones, la matriz columna de la deformación inicial causada por cambio de la temperatura estará dada por la Ecuación (2.114) y por la Ecuación (2.115), respectivamente.
[ ]TTT 00 ∆∆= ααε (2.114)
[ ]TTT 0)1(0 ∆∆+= αανε (2.115)
Al considerar esfuerzos y deformaciones iniciales, la relación entre el esfuerzo y la de-formación se modifica, conservando su linealidad como se ilustra en la xxx para un pro-blema unidimensional. Por lo tanto, la ecuación constitutiva del material incluyendo la matriz columna del esfuerzo inicial 0
σ y de la deformación inicial 0ε , será de la forma:
00 )( σεεDσ +−= (2.116)
Se observa que se mantiene la proporcionalidad entre el esfuerzo y la deformación me-cánica dada por la diferencia entre la deformación total y la deformación inicial.
Asimismo, la relación entre el esfuerzo y la deformación en el interior de un elemento finito e cuyos esfuerzos y deformaciones iniciales son constantes es de la forma:
)(0)(
0)()()()( ))(()( e
eeeee V∈∀+−= xσεxεDxσ (2.117)

Análisis estructural mediante el método de los elementos finitos 43
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
Sustituyendo la relación entre la deformación y el desplazamiento nodal presentada en la Ecuación (2.6) en la expresión anterior se tiene que:
)(0)(
0)()()()()()( )()( e
eeeeeee V∈∀+−= xσεDaxBDxσ (2.118)
Reemplazando la ecuación anterior y la Ecuación (2.10) en el principio de los trabajos virtuales indicado en la Ecuación (2.1), se obtiene:
)(
1
0)()(
0)()()()()()()()(
)(1
)()()()(
)()()(
)(
nTm
e V
e
T
e
V
ee
T
e
V
e
T
ee
T
e
T
e
e
m
e V
ee
T
e
T
e
eeet
e
dVdVdVdS
dV
faσBεDBbNpNa
aBDBa
δδ
δ
+
−++
=
∑ ∫∫∫∫
∑ ∫
= Γ
=
(2.119)
El término entre paréntesis a la izquierda de la igualdad anterior se define como la ma-triz de rigidez del elemento )(e
K mostrado en la Ecuación (2.12). En cambio, el término entre paréntesis a la derecha es el vector de fuerzas nodales equivalentes del elemento )(e
f , el cual corresponde a la suma del vector de fuerzas nodales equivalentes de superficie )(e
sf , de cuerpo )(e
bf , de deformaciones iniciales )(e
εf y de esfuerzos iniciales )(e
σf , como se indica en la siguientes ecuaciones.
)()()()()( eee
b
e
s
e
σε fffff +++= (2.120)
∫Γ
=)(
)()()(
e
dSe
T
e
e
s pNf (2.121)
∫=)(
)()()(
eV
e
T
e
e
b dVbNf (2.122)
∫=)(
0)()()(
)(
eV
ee
T
e
e dVεDBfε (2.123)
∫−=)(
0)()(
)(
eV
e
T
e
e dVσBfσ (2.124)
El resto de la formulación del método de los elementos finitos está expresado en las ecuaciones (2.14) a (2.21), considerando que el vector de fuerzas nodales equivalente está dado en la Ecuación (2.120) y en las ecuaciones (2.121) a (2.124) .
Los vectores de fuerzas nodales equivalentes obtenidos por deformaciones y por esfuer-zos iniciales se puede escribir de la siguiente manera:
44 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)4,,2,1(,)(
0)()(
)()(
)(
)(2
)(1
)(L
M==
= ∫ idVeV
ee
Te
i
e
i
e
n
e
e
eεDBf
f
f
f
f ε
ε
ε
ε
ε (2.125)
)4,,2,1(,)(
0)(
)()(
)(
)(2
)(1
)(L
M==
= ∫ idVeV
e
Te
i
e
i
e
n
e
e
eσBf
f
f
f
f σ
σ
σ
σ
σ (2.126)
2.5.1. Esfuerzos y deformaciones iniciales en un elemento triangular lineal
En particular, el vector de fuerzas nodales equivalentes asociadas a las deformaciones ini-ciales para un elemento triangular lineal es igual a:
++
++=
=
=
=
∫
)(0)(33
)(0)(22
)(0)(12
)(0)(33
)(0)(12
)(0)(11)(
)(0
)(0
)(0
)(33
)(11
)(12
)(12
)(11
)()(
)(3
)(2
)(1
)(
)(
)(
2
)3,2,1(
00
0
0
0
0
2)(
e
xy
e
i
e
yy
ee
xx
e
i
e
xy
e
i
e
yy
ee
xx
e
ie
i
A e
xy
e
yy
e
xx
e
ee
ee
ii
ii
e
e
i
e
e
e
e
DbDDc
DcDDbt
idA
D
DD
DD
bc
cb
A
t
e
γεε
γεε
γ
ε
ε
ε
ε
ε
ε
ε
ε
f
f
f
f
f
f
(2.127)
Asimismo, el vector de fuerzas nodales equivalentes asociadas a los esfuerzos iniciales es igual a:
+
+=
=
−=
= ∫
)(0)(0
)(0)(0)(
)(0
)(0
)(0
)()(
)(3
)(2
)(1
)(
2
)3,2,1(0
0
2,
)(
e
xyi
e
yyi
e
xyi
e
xxie
i
A e
xy
e
yy
e
xx
ii
ii
e
e
i
e
e
e
e
bc
cbt
idAbc
cb
A
t
e
σσ
σσ
σ
σ
σ
σ
σ
σ
σ
σ
σ
f
f
f
f
f
f
(2.128)
2.5.2. Esfuerzos y deformaciones iniciales en un elemento rectangular bilineal
El vector de fuerzas nodales equivalentes asociadas a las deformaciones iniciales para un elemento rectangular bilineal es igual a:

Análisis estructural mediante el método de los elementos finitos 45
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
++
++=
=
=
+=+=
=
∫ ∫+
−
+
−
)(0)(33
)()(0)(22
)(0)(12
)(
)(0)(33
)()(0)(12
)(0)(11
)()(
)(0
)(0
)(0
)(33
)(22
)(12
)(12
)(111
1
1
1
)(
)()()()(
)(4
)(3
)(2
)(1
)(
)(
)(2
)4,3,2,1(
00
0
0
)()(0
)(0)(
4
)1()(,)1()(,
e
xy
e
i
e
yy
ee
xx
e
i
e
xy
e
i
e
yy
ee
xx
e
ie
i
e
xy
e
yy
e
xx
e
ee
ee
ii
iie
i
iiiiii
e
e
e
e
e
bDsDDas
DasDDbst
idd
D
DD
DD
hg
ght
sasgsbsh
γεε
γεε
ηξ
γ
ε
ε
ηξ
ξη
ξξηη
ξη
ηξ
ε
ε
ξηηξ
ε
ε
ε
ε
ε
f
f
f
f
f
f
f
(2.129)
Asimismo, el vector de fuerzas nodales equivalentes asociadas a los esfuerzos iniciales es igual a:
+
+=
=
=
+=+=
=
∫ ∫+
−
+
−
)(0)()(0)(
)(0)()(0)()(
)(0
)(0
)(01
1
1
1
)(
)()()()(
)(4
)(3
)(2
)(1
)(
2
)4,3,2,1()()(0
)(0)(
4
)1()(,)1()(,
e
xyi
e
yyi
e
xyi
e
xxie
i
e
xy
e
yy
e
xx
ii
iie
i
iiiiii
e
e
e
e
e
bsas
asbst
iddhg
ght
sasgsbsh
σσ
σσ
ηξ
σ
σ
σ
ηξ
ξη
ξξηη
ξη
ηξ
σ
σ
ξηηξ
σ
σ
σ
σ
σ
f
f
f
f
f
f
f
(2.130)
2.6. Algoritmo de cálculo
La formulación presentada anteriormente permite obtener el campo de los desplazamientos, las deformaciones y los esfuerzos sobre un sólido en condición plana de esfuerzos o de de-formaciones. El procedimiento desarrollado con el método de los elementos finitos se in-dica en las xxx, donde se incluyen los nombres de las subrutinas y variables implementadas en el programa PEFiCA.

46
Capítulo 2. E
lasticidad Tridim
ensional
© D
orian Luis L
inero Segrera – U
niversidad Nacional de C
olombia, 2010
vector de fuerzas
equivalentes de superficie
lectura de datos de
entrada
crear matriz de rigidez del
elemento
KTRIEL ó KRECEL
ensamblar la matriz de
rigidez del elemento
ENSAMK
crear la matriz de rigidez
del sistema K
crear matriz de rigidez del
sistema llena de ceros
MTCONS
ciclo por elemento finito
for
Next IELE
Leer tabla de
conectividades
EDLECI
Leer propiedades
EDLECE
crear vector de fuerzas
equivalentes del sistema f (1)
leer tabla de desplaz
nodales conocidos
EDTABR
dim
Inicializar variables
)(e
sf
)(eK
tE ,,ν
βa
NGLELE
Crear tabla de
incidencias
NGLNUD
Crear tabla numeración
de GL por nudo
EDTABI
Leer tabla indicadores
de desplaz conocidos
EDLECE
leer de parám. malla
NNUD,NELE,NGLN,
NNUE,NDIM
EDLECR
leer de tabla de
coordenadas de nudos
XYZ()
EYOU,POIS,…
ELE()
MRV()
MRE()
MGL()
INC()
Crear tabla
de incidencias
KGL()
IELE=1,NELE
KEL()
KEL(), KGL()
FTRIES ó FRECES
ensamblar vector de
fuerzas equivalentes
ENSAMV
crear vector de fuerzas
del sistema lleno de ceros
MTCONS
ciclo por elemento finito
for
Next IELE
FGE()
IELE=1,NELE
FES()
FEL(), FGE()
organizar vector desplaz
nodales conocidos
ORFUGL y MTSUBM
DBB()
SUBRUTINA
Procedimiento
específico
Variable
Procedimiento general
Notación
)(eb
f
FTRIEC ó FRECEC
FEC()
vector de fuerzas
equivalentes de cuerpo
Sumar fuerzas equivalent
MTSUMA
FEL()=FES()+FEC()
vector de fuerzas
equivalentes de superficie
lectura de datos de
entrada
crear matriz de rigidez del
elemento
KTRIEL ó KRECEL
ensamblar la matriz de
rigidez del elemento
ENSAMK
crear la matriz de rigidez
del sistema K
crear matriz de rigidez del
sistema llena de ceros
MTCONS
ciclo por elemento finito
for
Next IELE
Leer tabla de
conectividades
EDLECI
Leer propiedades
EDLECE
crear vector de fuerzas
equivalentes del sistema f (1)
leer tabla de desplaz
nodales conocidos
EDTABR
dim
Inicializar variables
)(e
sf
)(eK
tE ,,ν
βa
NGLELE
Crear tabla de
incidencias
NGLNUD
Crear tabla numeración
de GL por nudo
EDTABI
Leer tabla indicadores
de desplaz conocidos
EDLECE
leer de parám. malla
NNUD,NELE,NGLN,
NNUE,NDIM
EDLECR
leer de tabla de
coordenadas de nudos
XYZ()
EYOU,POIS,…
ELE()
MRV()
MRE()
MGL()
INC()
Crear tabla
de incidencias
KGL()
IELE=1,NELE
KEL()
KEL(), KGL()
FTRIES ó FRECES
ensamblar vector de
fuerzas equivalentes
ENSAMV
crear vector de fuerzas
del sistema lleno de ceros
MTCONS
ciclo por elemento finito
for
Next IELE
FGE()
IELE=1,NELE
FES()
FEL(), FGE()
organizar vector desplaz
nodales conocidos
ORFUGL y MTSUBM
DBB()
SUBRUTINA
Procedimiento
específico
Variable
Procedimiento general
Notación
)(eb
f
FTRIEC ó FRECEC
FEC()
vector de fuerzas
equivalentes de cuerpo
Sumar fuerzas equivalent
MTSUMA
FEL()=FES()+FEC()
Fig
ura
2.7
. Algoritm
o de cálculo para problemas m
ecánicos bidimensionales (parte 1).
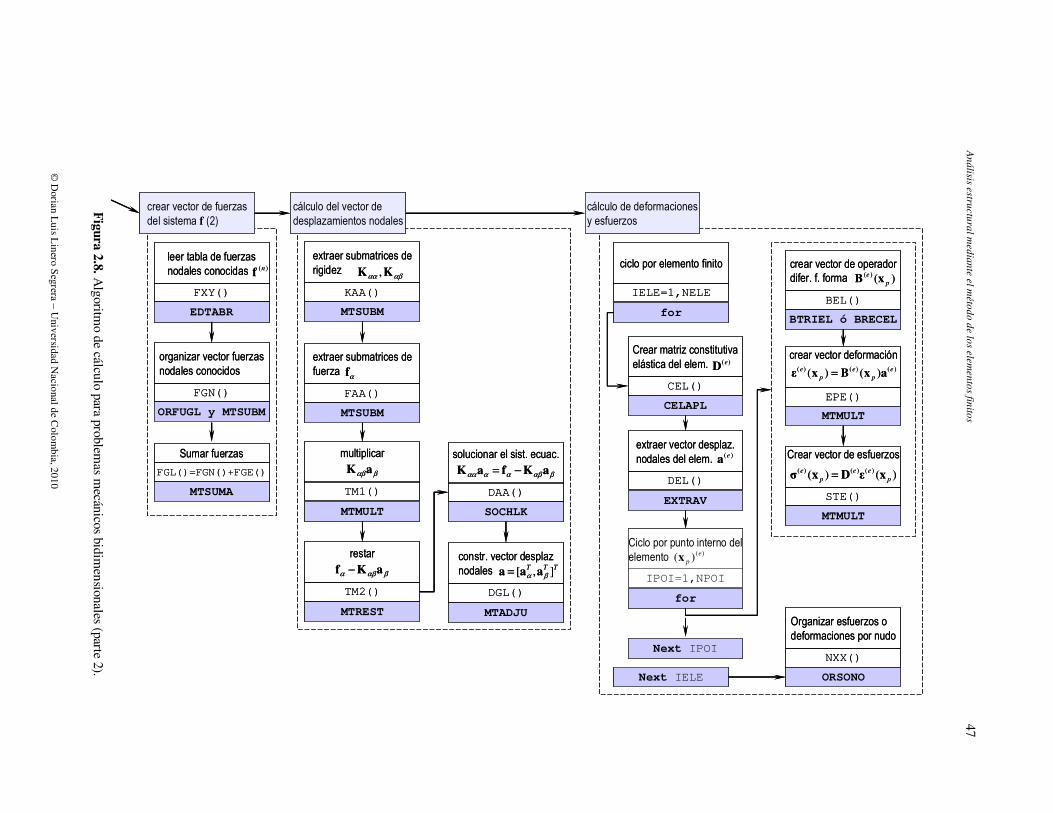
An
álisis e
structu
ral m
ed
ian
te e
l méto
do
de lo
s ele
men
tos fin
itos
47
© D
orian Luis L
inero Segrera – U
niversidad Nacional de C
olombia, 2010
extraer vector desplaz.
nodales del elem.
EXTRAV
crear vector de operador
difer. f. forma
BTRIEL ó BRECEL
Next IELE
crear vector deformación
MTMULT
cálculo de deformaciones
y esfuerzos
)()(p
e xB
)(ea
)()()( )()( e
p
e
p
e axBxε =
Crear vector de esfuerzos
MTMULT
Organizar esfuerzos o
deformaciones por nudo
ORSONO
Ciclo por punto interno del
elemento
for
)()( e
px
Next IPOI
cálculo del vector de
desplazamientos nodales
MTSUBM
extraer submatrices de
rigidez
constr. vector desplaz
nodales
MTADJU
TTT ],[ βα aaa =
αf
MTMULT
multiplicar
βαβaK
MTREST
restar
βαβα aKf −
SOCHLK
solucionar el sist. ecuac.
βαβαααα aKfaK −=
KAA()
MTSUBM
extraer submatrices de
fuerza
αβαα KK ,
FAA()
TM1()
TM2()
DAA()
DGL()
ciclo por elemento finito
for
IELE=1,NELE
DEL()
IPOI=1,NPOI
STE()
BEL()
NXX()
EPE()
crear vector de fuerzas
del sistema f (2)
leer tabla de fuerzas
nodales conocidas
EDTABR
)(nf
FXY()
organizar vector fuerzas
nodales conocidos
ORFUGL y MTSUBM
FGN()
Sumar fuerzas
MTSUMA
FGL()=FGN()+FGE() )()( )()()(p
ee
p
exεDxσ =
Crear matriz constitutiva
elástica del elem.
CELAPL
)(eD
CEL()
extraer vector desplaz.
nodales del elem.
EXTRAV
crear vector de operador
difer. f. forma
BTRIEL ó BRECEL
Next IELE
crear vector deformación
MTMULT
cálculo de deformaciones
y esfuerzos
)()(p
e xB
)(ea
)()()( )()( e
p
e
p
e axBxε =
Crear vector de esfuerzos
MTMULT
Organizar esfuerzos o
deformaciones por nudo
ORSONO
Ciclo por punto interno del
elemento
for
)()( e
px
Next IPOI
cálculo del vector de
desplazamientos nodales
MTSUBM
extraer submatrices de
rigidez
constr. vector desplaz
nodales
MTADJU
TTT ],[ βα aaa =
αf
MTMULT
multiplicar
βαβ aK
MTREST
restar
βαβα aKf −
SOCHLK
solucionar el sist. ecuac.
βαβαααα aKfaK −=
KAA()
MTSUBM
extraer submatrices de
fuerza
αβαα KK ,
FAA()
TM1()
TM2()
DAA()
DGL()
ciclo por elemento finito
for
IELE=1,NELE
DEL()
IPOI=1,NPOI
STE()
BEL()
NXX()
EPE()
crear vector de fuerzas
del sistema f (2)
leer tabla de fuerzas
nodales conocidas
EDTABR
)(nf
FXY()
organizar vector fuerzas
nodales conocidos
ORFUGL y MTSUBM
FGN()
Sumar fuerzas
MTSUMA
FGL()=FGN()+FGE() )()( )()()(p
ee
p
exεDxσ =
Crear matriz constitutiva
elástica del elem.
CELAPL
)(eD
CEL()
Fig
ura
2.8
. Algoritm
o de cálculo para problemas m
ecánicos bidimensionales (parte 2).

48 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
1 2
3
u
4
u
u u
M M
(b)u u
u u
M M
(a)
ξ
η
),( ηξu
),( ηξv
1 2
3
u
4
u
u u
M M
(b)1 2
3
u
4
u
u u
M M
1 2
3
u
4
u
u u
M M
(b)u u
u u
M M
(a)
ξ
η
),( ηξu
),( ηξv
u u
u u
M M
(a)
ξ
η
),( ηξu
),( ηξv
2.7. Aproximación de los elementos bidimensionales lineales a flexión pura
Los elementos finitos triangular lineal y rectangular bilineal representan adecuadamente el comportamiento de sólidos sometidos a tracción o compresión uniforme. Sin embargo, en estructuras donde predomina la flexión, la precisión de tales elementos es baja, haciendo necesaria la utilización de mallas finas para representar el comportamiento.
De acuerdo con la teoría de vigas, las componentes del desplazamiento en una región rectangular de base 2a y altura 2b corresponden a:
( ) ( )22
22
12
12
),(,),( ηξηξξηηξ −+−==EI
Mb
EI
Mavab
EI
Mu (2.131)
siendo ξ y η las coordenadas en sistema coordenado natural cuyo origen corresponde con el centro del rectángulo (Figura 2.4). Como lo indica la Figura 2.9(a), el desplaza-miento en dirección y varia de forma cuadrática con respecto a ξ y η . En cambio, un elemento finito rectangular de cuatro nudos conserva sus lados rectos cuando se deforma (Figura 2.9(b)), y por lo tanto las componentes de desplazamiento en flexión pura son:
0),(,),( == srvrsusru (2.132)
Figura 2.9. Región rectangular sometida a flexión pura: (a) deformada real, (b) deformada de un elemento finito rectangular bilineal.
Por otro lado, la deformación angular obtenida a partir de las derivadas del campo del
desplazamiento exacto se obtiene de la forma:
( ) 01
22
1 2
=−=
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂+
∂
∂=
aEI
Ma
bab
EI
M
x
v
x
v
y
u
y
u
x
v
y
u
xy
xy
ξξγ
η
η
ξ
ξ
η
η
ξ
ξγ
(2.133)
El resultado anterior ratifica que el esfuerzo cortante )1(2 νγσ += Exyxy en un estado de flexión pura es nulo. En cambio, la deformación angular calculada a partir de las com-ponentes de desplazamiento en un elemento rectangular bilineal es igual a:

Análisis estructural mediante el método de los elementos finitos 49
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
a
uxy
ξγ = (2.134)
Lo anterior indica la existencia de una deformación angular ficticia en flexión pura, ge-nerando un aumento de la rigidez de la estructura. Sin embargo, los errores inducidos se reducen con mallas finas o con técnicas de adición de nudos intermedios e integración re-ducida (Oñate 1995).
2.8. Elementos finitos bidimensionales de orden superior
Algunos de los elementos finitos definidos en el espacio bidimensional cuya función de forma es de orden mayor obtenidos de formulaciones paramétricas se indican en la Figura
2.10 (Bathe 1996).

50 Capítulo 2. Elasticidad Tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
Figura 2.10. Elementos finitos bidimensionales.

0.40columna
0.35
0.20
0.20
0.30
0.20
t = 0.40
ménsula
armadura
xy
(a) (b)
2500 kN/m2
0.20 0.10
dominio
modelado
100 kN
placa de
apoyo
0.40columna
0.35
0.20
0.20
0.30
0.20
t = 0.40
ménsula
armadura
xy
xy
(a) (b)
2500 kN/m2
0.20 0.10
dominio
modelado
100 kN
placa de
apoyo
Capítulo 3 Problemas de elasticidad bidimensional
Este capítulo describe la formulación, implementación y aplicación del método de los ele-mentos finitos en el cálculo de los desplazamientos, las deformaciones y los esfuerzos en sólidos en condición plana de esfuerzos y de deformaciones, sometidos a fuerzas estáticas puntuales o distribuidas, cuyo material es elástico lineal isótropo (Zienkiewicz 1980; Seger-lin 1984; Weaver & Johnson 1984; Cook, Malkus et al. 1989; Oñate 1995; Hughes 2000; Oñate & Zárate 2000).
3.1. Ejemplo de aplicación: ménsula de concreto sometida a una carga distribuida
La ménsula de una columna de concreto cuyas dimensiones se presentan en la Figura 3.1(a), soporta una reacción vertical de 100 kN dada por el extremo de una armadura como lo ilustra la Figura 3.1(b). La carga vertical se distribuye en una placa de apoyo de 0.10m por 0.40m ubicada a 0.20m de la cara interior de la columna. El concreto tiene un módulo de Young de 20.0 × 106 kN/m2 y una relación de Poisson de 0.25.
El dominio modelado contiene el volumen de la ménsula y de un tramo de columna 0.20m por encima y por debajo de la ménsula.
Figura 3.1. Ménsula de concreto sometida a una carga distribuida: (a) geometría, cargas y condi-ciones de borde del dominio modelado, (b) esquema del sistema estructural.
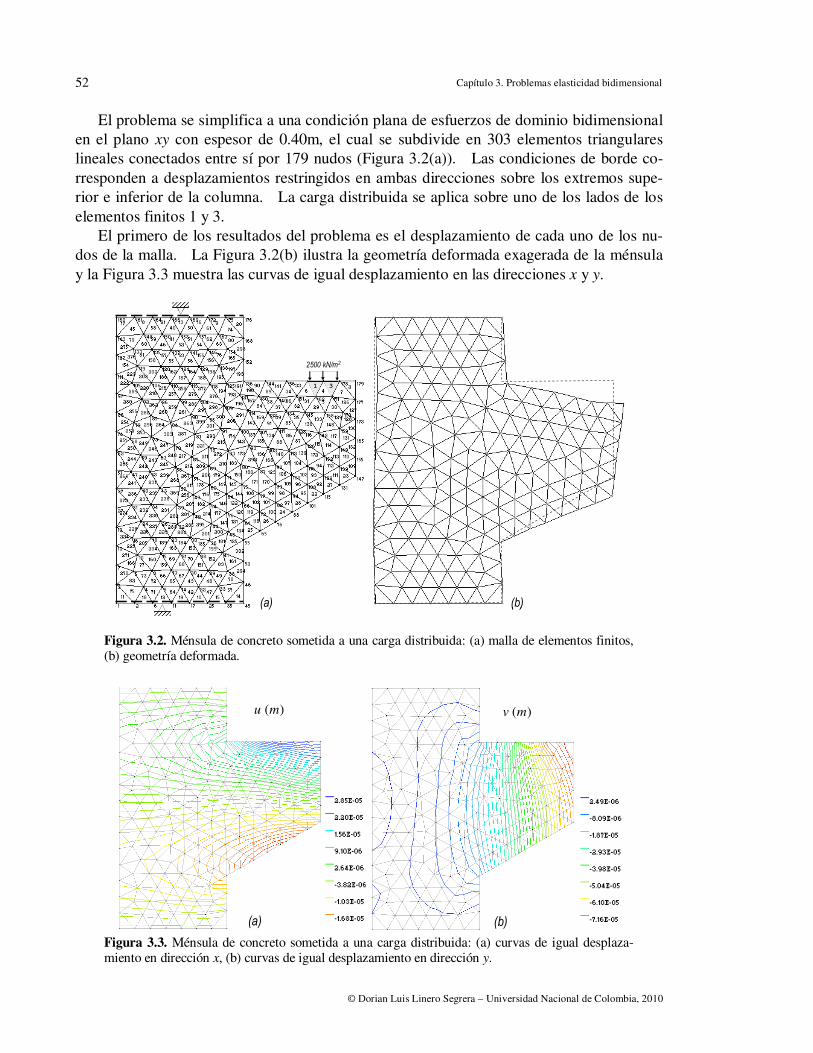
52 Capítulo 3. Problemas elasticidad bidimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
2500 kN/m2
1 3
(a) (b)
2500 kN/m2
1 3
2500 kN/m2
1 3
(a) (b)
(b)
)(mv
(a)
)(mu
(b)
)(mv
(a)
)(mu
El problema se simplifica a una condición plana de esfuerzos de dominio bidimensional en el plano xy con espesor de 0.40m, el cual se subdivide en 303 elementos triangulares lineales conectados entre sí por 179 nudos (Figura 3.2(a)). Las condiciones de borde co-rresponden a desplazamientos restringidos en ambas direcciones sobre los extremos supe-rior e inferior de la columna. La carga distribuida se aplica sobre uno de los lados de los elementos finitos 1 y 3.
El primero de los resultados del problema es el desplazamiento de cada uno de los nu-dos de la malla. La Figura 3.2(b) ilustra la geometría deformada exagerada de la ménsula y la Figura 3.3 muestra las curvas de igual desplazamiento en las direcciones x y y.
Figura 3.2. Ménsula de concreto sometida a una carga distribuida: (a) malla de elementos finitos, (b) geometría deformada.
Figura 3.3. Ménsula de concreto sometida a una carga distribuida: (a) curvas de igual desplaza-miento en dirección x, (b) curvas de igual desplazamiento en dirección y.
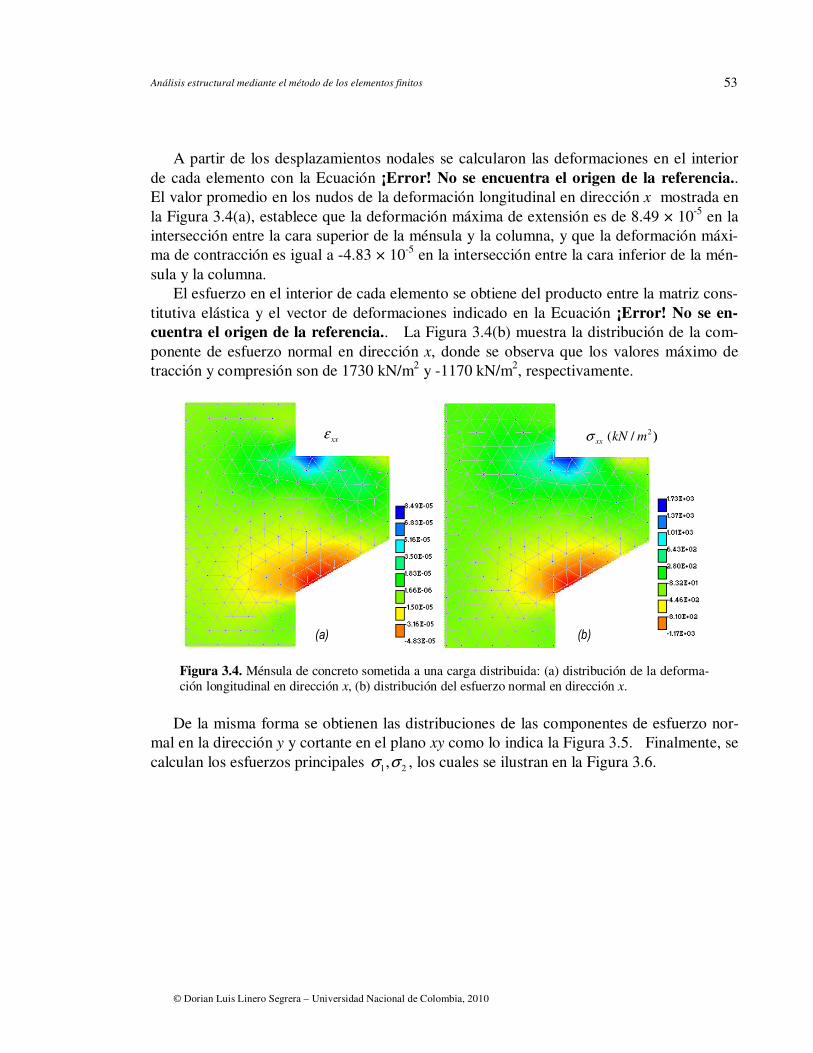
Análisis estructural mediante el método de los elementos finitos 53
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)/( 2mkNxxσxxε
(a) (b)
)/( 2mkNxxσxxε
(a) (b)
A partir de los desplazamientos nodales se calcularon las deformaciones en el interior
de cada elemento con la Ecuación ¡Error! No se encuentra el origen de la referencia.. El valor promedio en los nudos de la deformación longitudinal en dirección x mostrada en la Figura 3.4(a), establece que la deformación máxima de extensión es de 8.49 × 10-5 en la intersección entre la cara superior de la ménsula y la columna, y que la deformación máxi-ma de contracción es igual a -4.83 × 10-5 en la intersección entre la cara inferior de la mén-sula y la columna.
El esfuerzo en el interior de cada elemento se obtiene del producto entre la matriz cons-titutiva elástica y el vector de deformaciones indicado en la Ecuación ¡Error! No se en-
cuentra el origen de la referencia.. La Figura 3.4(b) muestra la distribución de la com-ponente de esfuerzo normal en dirección x, donde se observa que los valores máximo de tracción y compresión son de 1730 kN/m2 y -1170 kN/m2, respectivamente.
Figura 3.4. Ménsula de concreto sometida a una carga distribuida: (a) distribución de la deforma-ción longitudinal en dirección x, (b) distribución del esfuerzo normal en dirección x.
De la misma forma se obtienen las distribuciones de las componentes de esfuerzo nor-
mal en la dirección y y cortante en el plano xy como lo indica la Figura 3.5. Finalmente, se calculan los esfuerzos principales 21,σσ , los cuales se ilustran en la Figura 3.6.

54 Capítulo 3. Problemas elasticidad bidimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)/( 2mkNyyσ )/( 2
mkNxyσ
(a) (b)
)/( 2mkNyyσ )/( 2
mkNxyσ
(a) (b)
)/( 22 mkNσ)/( 2
1 mkNσ
(a) (b)
)/( 22 mkNσ)/( 2
1 mkNσ
(a) (b)
Figura 3.5. Ménsula de concreto sometida a una carga distribuida: (a) distribución del esfuerzo normal en dirección y, (b) distribución del esfuerzo cortante en el plano xy.
Figura 3.6. Ménsula de concreto sometida a una carga distribuida: (a) distribución del esfuerzo normal en dirección y, (b) distribución del esfuerzo cortante en el plano xy.
3.2. Ejemplo de aplicación: principio de Saint Venant
Con el fin de demostrar el principio de concentración de esfuerzos de Saint Venant (Timoshenko & Goodier 1970; Ortiz 1998), se analizó una lámina de acero de base b = 0.40m por una altura h = 2.5b =1.00m, la cual está sometida a la carga puntual P = 2 kN en el extremo superior mostrada en la Figura 3.7(a). El acero tiene un módulo de Young de 200.0 × 106 kN/m2 y una relación de Poisson de 0.25.
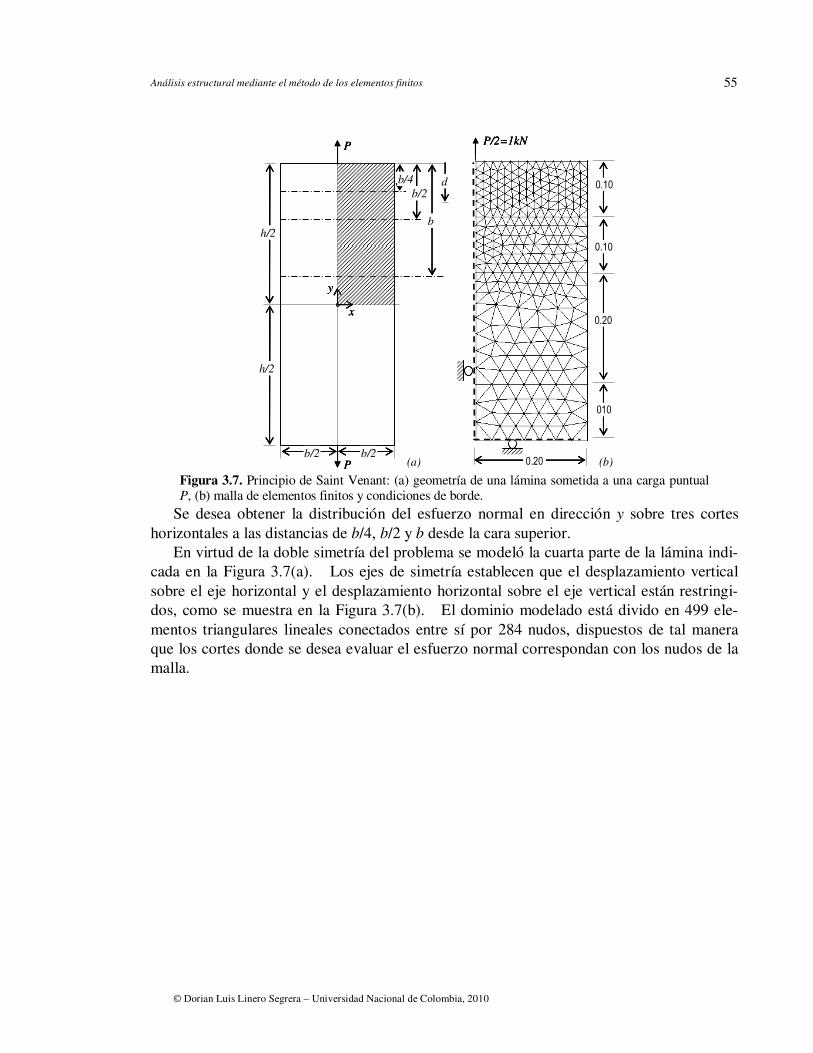
Análisis estructural mediante el método de los elementos finitos 55
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
b/2b/2
b/4
b/2
bh/2
h/2
P
P
d
x
y
(a) 0.20
010
0.10
0.10
0.20
P/2=1kN
(b)b/2b/2
b/4
b/2
bh/2
h/2
P
P
d
x
y
(a)b/2b/2
b/4
b/2
bh/2
h/2
P
P
d
x
y
(a) 0.20
010
0.10
0.10
0.20
P/2=1kN
(b)0.20
010
0.10
0.10
0.20
P/2=1kN
(b)
Figura 3.7. Principio de Saint Venant: (a) geometría de una lámina sometida a una carga puntual P, (b) malla de elementos finitos y condiciones de borde.
Se desea obtener la distribución del esfuerzo normal en dirección y sobre tres cortes horizontales a las distancias de b/4, b/2 y b desde la cara superior.
En virtud de la doble simetría del problema se modeló la cuarta parte de la lámina indi-cada en la Figura 3.7(a). Los ejes de simetría establecen que el desplazamiento vertical sobre el eje horizontal y el desplazamiento horizontal sobre el eje vertical están restringi-dos, como se muestra en la Figura 3.7(b). El dominio modelado está divido en 499 ele-mentos triangulares lineales conectados entre sí por 284 nudos, dispuestos de tal manera que los cortes donde se desea evaluar el esfuerzo normal correspondan con los nudos de la malla.
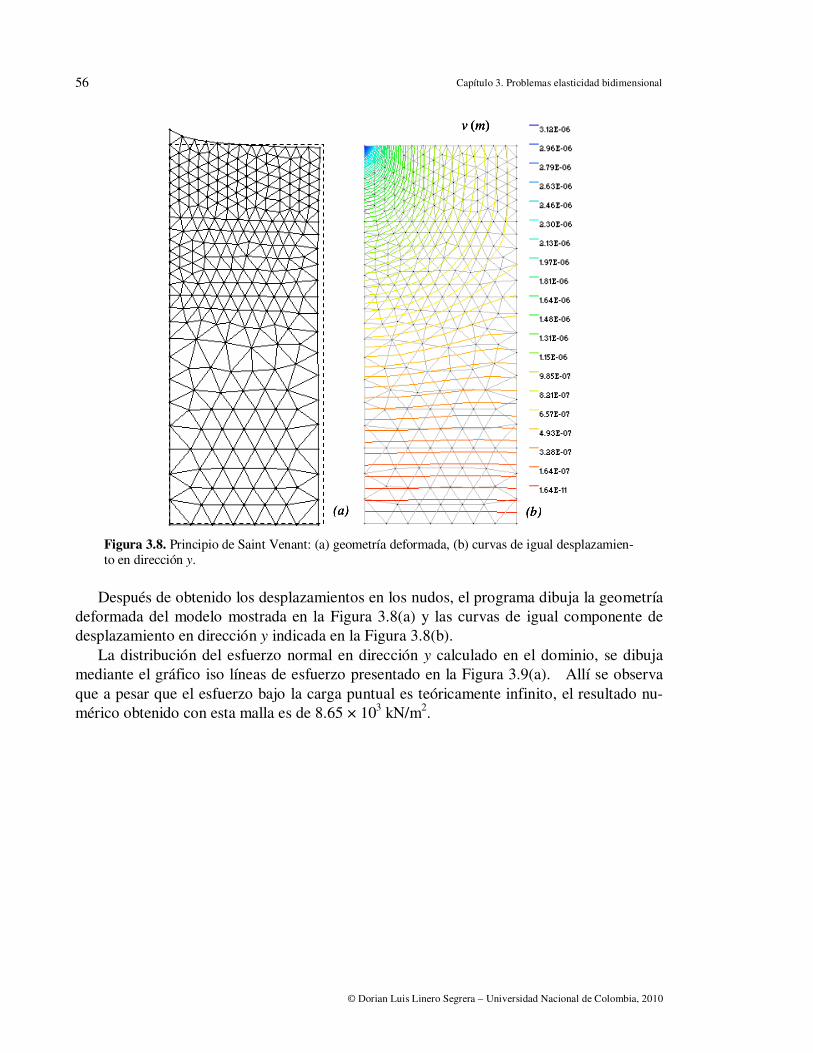
56 Capítulo 3. Problemas elasticidad bidimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)(mv
(b)(a)
)(mv
(b)(a)
)(mv
(b)(a)
Figura 3.8. Principio de Saint Venant: (a) geometría deformada, (b) curvas de igual desplazamien-to en dirección y.
Después de obtenido los desplazamientos en los nudos, el programa dibuja la geometría
deformada del modelo mostrada en la Figura 3.8(a) y las curvas de igual componente de desplazamiento en dirección y indicada en la Figura 3.8(b).
La distribución del esfuerzo normal en dirección y calculado en el dominio, se dibuja mediante el gráfico iso líneas de esfuerzo presentado en la Figura 3.9(a). Allí se observa que a pesar que el esfuerzo bajo la carga puntual es teóricamente infinito, el resultado nu-mérico obtenido con esta malla es de 8.65 × 103 kN/m2.

Análisis estructural mediante el método de los elementos finitos 57
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)/( 2mkNyyσ(a)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.00 0.05 0.10 0.15 0.20
d=b/4
d=b/2
d=b
d>>b
med
yy
σ
σ
x (m) (b)
)/( 2mkNyyσ(a)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.00 0.05 0.10 0.15 0.20
d=b/4
d=b/2
d=b
d>>b
med
yy
σ
σ
x (m)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.00 0.05 0.10 0.15 0.20
d=b/4
d=b/2
d=b
d>>b
med
yy
σ
σ
x (m) (b)
Figura 3.9. Principio de Saint Venant: (a) curvas de igual esfuerzo normal en dirección y, (b) dis-tribución del esfuerzo normar en dirección y sobre tres cortes horizontales.
Finalmente se obtiene la distribución de esfuerzos en dirección y sobre tres cortes hori-
zontales, la Figura 3.9(a) presenta gráficamente dichos resultados. Se observa que el es-fuerzo normal toma un valor máximo sobre el eje de la carga aplicada 2.59 veces mayor al esfuerzo medio sobre el corte a b/4, 1.44 veces mayor al esfuerzo medio sobre el corte a b/2 y 1.03 veces mayor al esfuerzo medio sobre el corte a b. Por lo tanto se demuestra que la distribución del esfuerzo normal es aproximadamente igual al esfuerzo medio para distan-cias superiores a el ancho b con respecto al punto de aplicación de la carga.
3.3. Ejemplo de aplicación: estructura de drenaje
La estructura de drenaje hecha de concreto soporta una fuerza distribuida uniforme de w = 5000 kN/m
2 en su cara superior como lo muestra la Figura 3.10. El material tiene un tiene un módulo de Young de 20.0 × 106 kN/m2 y una relación de Poisson de 0.3. Se desea obte-ner la distribución de esfuerzos principales en la estructura (Weaver & Johnson 1984).

58 Capítulo 3. Problemas elasticidad bidimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
3.00
5.20
3.003.003.00
w
3.00
3.00
5.20
3.003.003.00
w
3.00
Figura 3.10. Estructura de drenaje. Esquema descriptivo de geometría y cargas aplicadas.
Figura 3.11. Estructura de drenaje: (a) malla de elementos finitos y condiciones de borde, (b) geometría deformada.
El problema se simplifica a una condición plana de deformaciones con un espesor unita-
rio. Dada la simetría del problema se modela la mitad del sólido indicada en la Figura 3.10. El dominio modelado se subdivide en 479 elementos triangulares lineales conecta-dos entre sí por 281 nudos como lo indica la Figura 3.11(a).
A partir de los desplazamientos nodales obtenidos se dibuja la geometría deformada del modelo (Figura 3.11(b)) y el campo de las componentes de desplazamiento en las direccio-nes x y y (Figura 3.12).
(b)
w
3.00 3.00
5.20
(a) (b)
w
3.00 3.00
5.20
w
3.00 3.00
5.20
(a)

Análisis estructural mediante el método de los elementos finitos 59
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)(mv
(b)
)(mu
(a)
)(mv
(b)
)(mu
(a)
)/( 21 mkNσ
(a) (b)
)/( 21 mkNσ
(a) (b)
Figura 3.12. Estructura de drenaje. Curvas de igual desplazamiento: (a) componente en dirección x, (b) componente en dirección y.
Después de obtenidas las componentes esfuerzo xyyyxx σσσ ,, del elemento se calculan
los esfuerzos principales 21,σσ . La Figura 3.13 y Figura 3.14 muestra la distribución de los esfuerzos principales en la malla obtenido como el valor promedio en los nudos o valor suavizado y como el valor en el interior de cada elemento o valor no suavizado. Los es-fuerzos máximos a tracción y a compresión observados del valor promedio en los nudos son de 7.25 × 103 kN/m2 y -16.8 × 103 kN/m2 respectivamente.
Figura 3.13. Estructura de drenaje. Distribución del primer esfuerzo principal: (a) valor promedio en los nudos, (b) valor en el interior de los elementos.
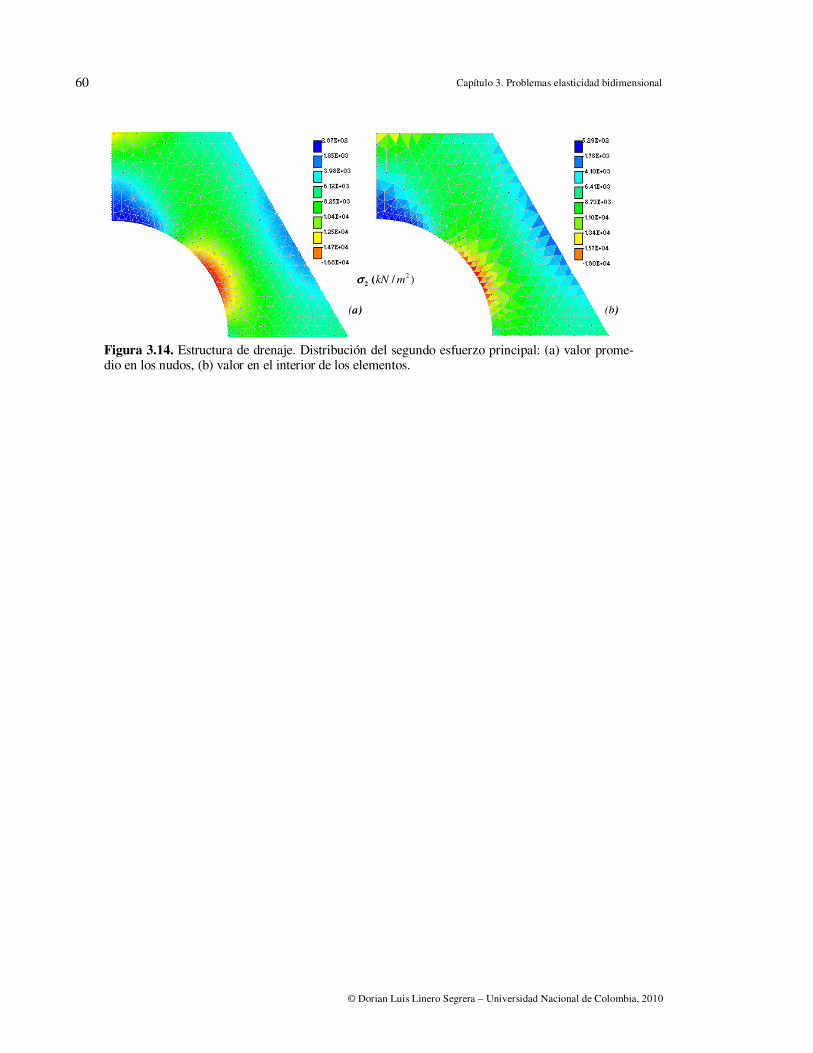
60 Capítulo 3. Problemas elasticidad bidimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)/( 22 mkNσ
(a) (b)
)/( 22 mkNσ
(a) (b)
Figura 3.14. Estructura de drenaje. Distribución del segundo esfuerzo principal: (a) valor prome-dio en los nudos, (b) valor en el interior de los elementos.
Capítulo 4 Formulación del problema elástico lineal tridimensional mediante el método de los
elementos finitos
Retomando la formulación general del problema elástico lineal en el marco del método de los elementos finitos presentada en el Apartado 2.1, en este capítulo se deduce un elemento finito tridimensional de elasticidad lineal y se describen algunos ejemplos de aplicación.
4.1. Elemento tetraédrico de cuatro nudos
El elemento tetraédrico de cuadro nudos es la extensión tridimensional del elemento trian-gular lineal. En este elemento se considera que las componentes del campo de los despla-zamientos en su interior se describen mediante funciones de aproximación lineales de la forma:
)(1211109
)(
)(8765
)(
)(4321
)(
),,(),,(
),,(),,(
),,(),,(
ee
ee
ee
Vzyxzyxzyxw
Vzyxzyxzyxv
Vzyxzyxzyxu
∈∀+++=
∈∀+++=
∈∀+++=
αααα
αααα
αααα
(4.1)
Recordando que cada desplazamiento nodal corresponde a una de las componentes de desplazamiento en un nudo del elemento como lo indica la Figura 4.1, por lo tanto los cua-tro desplazamientos nodales en dirección x son iguales a:
4443421444)()(
4
3433321333)()(
3
2423221222)()(
2
1413121111)()(
1
),,(
),,(
),,(
),,(
zyxzyxuu
zyxzyxuu
zyxzyxuu
zyxzyxuu
ee
ee
ee
ee
αααα
αααα
αααα
αααα
+++==
+++==
+++==
+++==
(4.2)
Este sistema de ecuaciones simultaneas permite obtener a las coordenadas generalizadas
4321 ,,, αααα en función de los desplazamientos nodales 4321 ,,, uuuu . Sustituyendo las coordenadas generalizadas en la función de aproximación del desplazamiento en x dada en la Ecuación (4.1), se tiene que:
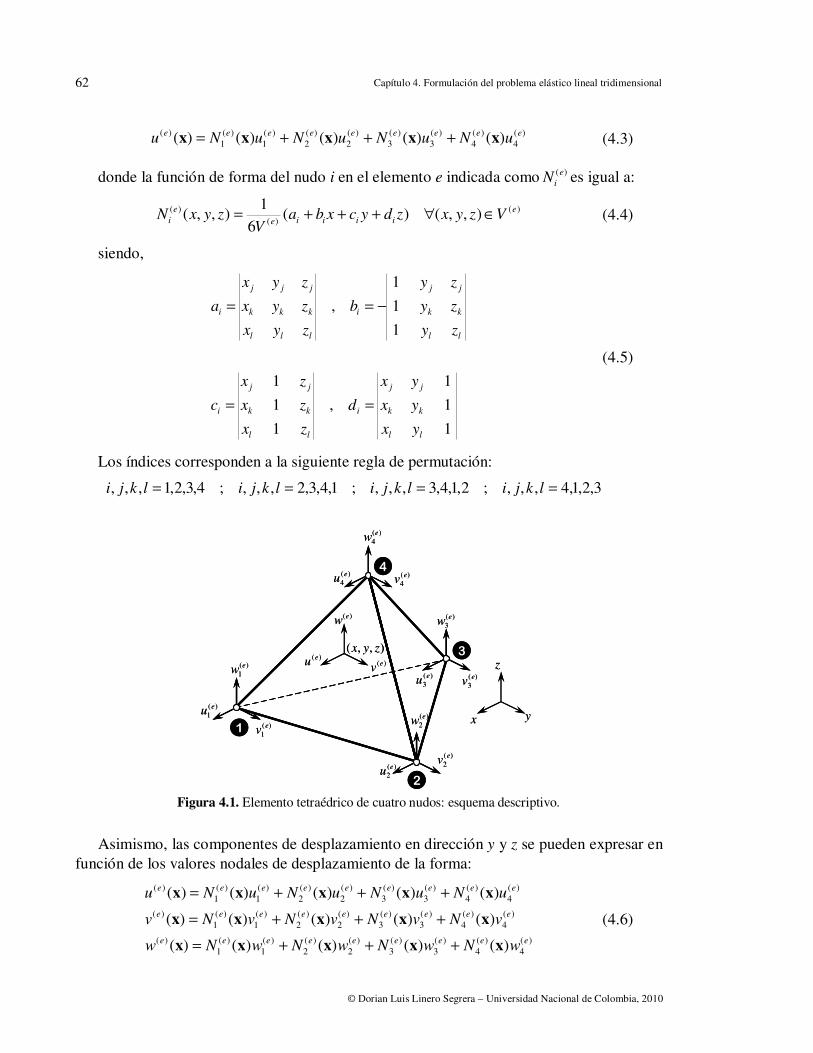
62 Capítulo 4. Formulación del problema elástico lineal tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)(1
eu
1
2
3
4
x)(
1e
v
)(1
ew
y
)(2e
u
)(2
ev
)(2e
w
)(3
eu )(
3e
v
)(3
ew
)(4
eu
z
)(4
ev
)(4e
w
)(eu )(e
v
)(ew
),,( zyx
)(1
eu
1
2
3
4
x)(
1e
v
)(1
ew
y
)(2e
u
)(2
ev
)(2e
w
)(3
eu )(
3e
v
)(3
ew
)(4
eu
z
)(4
ev
)(4e
w
)(eu )(e
v
)(ew
),,( zyx
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)( )()()()()( eeeeeeeee uNuNuNuNu xxxxx +++= (4.3)
donde la función de forma del nudo i en el elemento e indicada como )(e
iN es igual a:
)()(
)( ),,()(6
1),,( e
iiiie
e
i VzyxzdycxbaV
zyxN ∈∀+++= (4.4)
siendo,
1
1
1
,
1
1
1
1
1
1
,
ll
kk
jj
i
ll
kk
jj
i
ll
kk
jj
i
lll
kkk
jjj
i
yx
yx
yx
d
zx
zx
zx
c
zy
zy
zy
b
zyx
zyx
zyx
a
==
−==
(4.5)
Los índices corresponden a la siguiente regla de permutación:
3,2,1,4,,,;2,1,4,3,,,;1,4,3,2,,,;4,3,2,1,,, ==== lkjilkjilkjilkji
Figura 4.1. Elemento tetraédrico de cuatro nudos: esquema descriptivo.
Asimismo, las componentes de desplazamiento en dirección y y z se pueden expresar en
función de los valores nodales de desplazamiento de la forma:
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(
)(4
)(4
)(3
)(3
)(2
)(2
)(1
)(1
)(
)()()()()(
)()()()()(
)()()()()(
eeeeeeeee
eeeeeeeee
eeeeeeeee
wNwNwNwNw
vNvNvNvNv
uNuNuNuNu
xxxxx
xxxxx
xxxxx
+++=
+++=
+++=
(4.6)
Análisis estructural mediante el método de los elementos finitos 63
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
En problemas mecánicos tridimensionales, el vector de desplazamientos nodales del elemento finito e está conformado por las componentes de desplazamiento en cada uno de los nudos de la forma:
[ ]TTeTeTeTe
e
)(4
)(3
)(2
)(1)( aaaaa = (4.7)
siendo )(e
ia el subvector de componentes de desplazamiento del nudo i, es decir:
[ ]Te
i
e
i
e
i
e
i wvu)()()()( =a (4.8)
Por lo tanto, la matriz de funciones de forma de un elemento tetraédrico de cuatro nudos se expresa como:
[ ])(4
)(3
)(2
)(1)(
eeee
e NNNNN = (4.9)
donde la submatriz de funciones de forma del nudo i es igual a:
=)(
)(
)(
)(
00
00
00
e
i
e
i
e
i
e
i
N
N
N
N (4.10)
De acuerdo con las expresiones anteriores, el campo vectorial de los desplazamientos en el interior del elemento [ ]Teeee wvu )()()()( =u cuyas componentes están expresadas en la Ecuación (4.6), se puede escribir de forma matricial como )()()( eee aNu = .
El operador diferencial para problemas mecánicos tridimensionales actuando sobre la matriz de funciones de forma es igual a:
[ ])(4
)(3
)(2
)(1)(
eeee
e BBBBB = (4.11)
donde la submatriz de operadores diferenciales actuando sobre funciones de forma del nudo i es igual a:
∂∂
∂∂
∂∂
∂
∂
∂
=
∂∂
∂∂
∂∂
∂
∂
∂
=
)()(
)()(
)()(
)(
)(
)(
)(
)(
)(
)(
0
0
0
00
00
00
00
00
00
0
0
0
00
00
00
e
iy
e
iz
e
ix
e
iz
e
iy
e
iy
e
iz
e
iy
e
ix
e
i
e
i
e
i
yz
xz
xy
z
y
x
e
i
NN
NN
NN
N
N
N
N
N
N
B (4.12)
Sustituyendo la expresión de las funciones de forma de un elemento tetraédrico dada en la Ecuación (4.4) se obtiene que:

64 Capítulo 4. Formulación del problema elástico lineal tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
=
ii
ii
ii
i
i
i
e
e
i
cd
bd
bc
d
c
b
V
0
0
0
00
00
00
6
1)(
)(B (4.13)
Los términos de la matriz anterior son constantes con respecto a la posición en el inter-ior del elemento. Asimismo, la matriz columna de las componentes de deformación
[ ]T
yzxzxyzzyyxxe γγγεεε=)(ε en el interior del elemento tetraédrico de cuatro nudos dadas de la forma )()()( eee aBε = también es constante.
Conocido el campo de las deformaciones, la matriz columna de las componentes de es-fuerzo [ ]T
yzxzxyzzyyxxe zyx σσσσσσ=),,()(σ en el interior del elemento está defi-nido como )()()( eee εDσ = , siendo )(eD la matriz constitutiva de un material elástico, lineal e isótropo dada en la Ecuación (1.16).
La matriz de rigidez de un elemento tetraédrico de cuatro nudos se obtiene a partir de la Ecuación (2.12), definida para elementos finitos tridimensionales, como se indica a conti-nuación:
++
+
+
++
+++
+++
=
==
=
∫
)(
)(
)(
)()(
)()(
)()(
36
1
)4,3,2,1,(
665533
6623
5513
66235513
6644224412
4412554411
)()(
)()(
)()(
)(44
)(34
)(33
)(24
)(23
)(22
)(14
)(13
)(12
)(11
)(
)(
jijiji
jiji
jiji
jijijiji
jijijijiji
jijijijiji
e
e
ij
V
e
je
Te
i
e
ij
e
ee
eee
eeee
e
ccDbbDddD
cdDdcD
bdDdbD
dcDcdDdbDbdD
ddDbbDccDcbDbcD
bcDcbDddDccDbbD
V
jidV
sim
e
K
BDBK
K
KK
KKK
KKKK
K
(4.14)
El vector de fuerzas nodales equivalentes a las fuerzas de cuerpo o distribuidas por uni-dad de volumen )(e
bf del elemento tetraédrico de cuatro nudos se obtiene a partir de la Ecuación (2.13) es igual a:

Análisis estructural mediante el método de los elementos finitos 65
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
1
2
3
4
x y
z
)(124e
xp
)(124
)(1243
1 e
x
e pA
1
2
3
4
)(124
)(1243
1 e
x
e pA
)(124
)(1243
1 e
x
e pA
1
2
3
4
x y
z
x y
z
)(124e
xp
)(124
)(1243
1 e
x
e pA
1
2
3
4
)(124
)(1243
1 e
x
e pA
)(124
)(1243
1 e
x
e pA
)4,3,2,1(4
,)(
)(
)(
)(
)()()(
)(4
)(3
)(2
)(1
)(
)(
=
==
= ∫ i
b
b
bV
dVe
z
e
y
e
xe
V
e
Te
i
e
bi
e
b
e
b
e
b
e
b
e
b
e
bNf
f
f
f
f
f (4.15)
Figura 4.2. Elemento tetraédrico de cuatro nudos: presión en dirección x sobre la cara 124.
El vector de fuerzas nodales equivalentes a las cargas distribuidas por unidad de super-
ficie )(e
sf actuantes sobre las nc caras del elemento es igual a:
=
==
=
==
∫
∑=
)134(),234(),124(),123(
4,3,2,1
,,
)(
)()()(
)(
)(
)(
)(
)(4
)(3
)(2
)(1
)(
1
)()(
c
idA
p
p
p
ecA
e
c
Te
i
e
si
e
zc
e
yc
e
xc
e
c
e
sc
e
sc
e
sc
e
sc
e
sc
nc
c
e
sc
e
s
pNf
p
f
f
f
f
fff
(4.16)
donde para cada cara se tiene que:
[ ]
[ ]
[ ]
[ ]Te
z
e
y
e
x
e
z
e
y
e
x
e
z
e
y
e
x
ee
s
Te
z
e
y
e
x
e
z
e
y
e
x
e
z
e
y
e
x
ee
s
Te
z
e
y
e
x
e
z
e
y
e
x
e
z
e
y
e
x
ee
s
Te
z
e
y
e
x
e
z
e
y
e
x
e
z
e
y
e
x
ee
s
pppppppppA
pppppppppA
pppppppppA
pppppppppA
)(134
)(134
)(134
)(134
)(134
)(134
)(134
)(134
)(134
)(134)(
134
)(234
)(234
)(234
)(234
)(234
)(234
)(234
)(234
)(234
)(234)(
234
)(124
)(124
)(124
)(124
)(124
)(124
)(124
)(124
)(124
)(124)(
124
)(123
)(123
)(123
)(123
)(123
)(123
)(123
)(123
)(123
)(123)(
123
0003
0003
0003
0003
=
=
=
=
f
f
f
f

66 Capítulo 4. Formulación del problema elástico lineal tridimensional
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
(4.17)
Por ejemplo, la presión )(124e
xp aplicada en dirección x sobre la cara 1 – 2 – 4 es equiva-lente a fuerzas puntuales en los nudos 1, 2 y 4 de )(
124)(
12431 e
x
e pA , como lo ilustra la Figura 4.2.
4.2. Otros elementos finitos tridimensional
En un espacio tridimensional se definen elementos finitos tetraédricos y hexaédricos, de forma análoga a la formulación de los elementos bidimensionales triangulares y cuadrilate-rales. Por ejemplo, el producto entre tres polinomios de Lagrange permite obtener las fun-ciones de forma de un elemento hexagonal de lados rectos (Oñate 2009).
Figura 4.3. Elementos tridimensionales isoparamétricos: geometría real y normalizada.

Análisis estructural mediante el método de los elementos finitos 67
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010


Capítulo 5 Formulación de estructuras laminares elásticas
lineales mediante el método de los elementos finitos
Las estructuras laminares son sólidos que tienen dos dimensiones sustancialmente mayores a la tercera denominada espesor, la cual está sometida principalmente a cargas perpendicu-lares al plano generado por las dos dimensiones mayores. La relación de aspecto permite representar geométricamente a estas estructuras mediante una superficie establecida a la mitad de su espesor llamada superficie media o plano medio, como lo muestra la xxx.
Esté tipo de estructura se denomina placa si su superficie media es plana, en cambio se define como lámina o cascarón cuando la superficie media no lo es.
Es posible analizar a las estructuras laminares con elementos finitos sólidos, sin embar-go, esto conlleva un costo computacional elevado y en algunos casos incluso a un mal con-dicionamiento de las ecuaciones (Zienkiewicz 1980).
La teoría de placas es una simplificación de la elasticidad tridimensional, obtenida de forma análoga a la presentada en la teoría de vigas, donde los esfuerzos y las deformaciones en el espesor de la estructura se expresan mediante cantidades equivalentes sobre el plano medio. La teoría de vigas describe la flexión en una dirección, en cambio, la teoría de pla-cas incluye torsión y flexión en dos direcciones.
Sea una placa de espesor constante t, cuya superficie media coincide con el plano xy, sometida a cargas normales al plano medio y a momentos contenidos en dicho plano, como lo indica la Figura 5.1. La teoría general de placas considera las siguientes hipótesis:
• Hipótesis 1. Las componentes del desplazamiento de los puntos materiales del plano medio paralelas a él son iguales a cero, es decir 0== vu . Por lo tanto, los puntos ma-teriales del plano medio solo se desplazan en dirección z.
• Hipótesis 2. El esfuerzo normal en dirección z es despreciable.
• Hipótesis 3. Los puntos materiales que hacen parte de una misma línea recta normal al plano medio tienen el mismo desplazamiento en dirección z.
• Hipótesis 4. Los puntos materiales que conforman una línea recta normal al plano medio antes de la aplicación de las cargas, permanecen sobre la misma línea recta después de aplicadas las cargas.

70 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
y
x
z
plano medio (z=0)
t
dydxt
y
x
z
plano medio (z=0)
t
dydxt
Figura 5.1. Placa delgada: esquema general.
De acuerdo con la relación espesor/ancho de la placa puede o no considerarse que las lí-
neas normales al plano medio en la configuración no deformada, permanecen ortogonales en la configuración deformada. De lo anterior se derivan las siguientes dos modalidades de la teoría de placas (Oñate 2009):
• La teoría placas de Kirchhoff se aplica exclusivamente a placas delgadas cuya rela-ción espesor/ancho es menor a 0.10. Como hipótesis adicional (hipótesis 5) se consi-dera que las líneas normales al plano medio en la configuración no deformada, per-manecen ortogonales en la configuración deformada, es decir que las deformaciones por cortante transversales se desprecian. Los elementos finitos basados en esta teoría tienen continuidad C1 debido a la presencia de derivadas segundas de la deflexión en la expresión de los trabajos virtuales, siendo análoga a la teoría de vigas de Euler – Benoulli.
• La teoría de Reissner – Mindlin se aplica principalmente a placas cuya relación espe-sor/ancho es mayor a 0.10, denominadas placas gruesas. Como hipótesis adicional (hipótesis 5) se considera que las líneas normales al plano medio en la configuración no deformada, no son necesariamente ortogonales en la configuración deformada. Es-ta teoría puede aplicarse a placas delgadas utilizando técnicas de integración reducida o de campos de deformación cortante impuesto que eliminen la influencia excesiva del cortante transversal en la rigidez de la placa. Los elementos finitos basados en esta teoría tienen continuidad C0, siendo análogos a la teoría de vigas de Timoshenko.
5.1. Análisis de placas delgadas
5.1.1. Teoría de placas de Kirchhoff
A partir de las hipótesis 4 y 5 indicadas anteriormente, la teoría de placas de Kirchhoff de-fine a xθ como el ángulo en el plano xz, formado entre una línea recta normal al plano me-dio en la configuración no deformada y la línea recta formada por los mismos puntos mate-riales en la configuración deformada, como lo muestra la Figura 5.2(a). Este ángulo se

Análisis estructural mediante el método de los elementos finitos 71
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
(b)
x
z dy
dx
yθ
yv
2t
y
x
zdy
dx
2t
xθ
u
(a)
xθ
yθ
(b)
x
z dy
dx
yθ
yv
2t
y
x
zdy
dx
2t
xθ
u
(a)
xθ
yθ
considera positivo en la dirección –y. Asimismo, yθ es el ángulo en el plano yz, formado entre una línea recta normal al plano medio en la configuración no deformada y la línea recta formada por los mismos puntos materiales en la configuración deformada, como lo muestra la Figura 5.2(b). Este ángulo es positivo en dirección +x.
Considerando además a la hipótesis 1 y recordando que el plano medio está ubicado en 0=z , las componentes del desplazamiento en dirección x y y, se pueden expresar de la
forma:
),(),,(
),(),,(
yxzzyxv
yxzzyxu
y
x
θ
θ
−=
−= (5.1)
Figura 5.2. Placa delgada: (a) deformada en el plano xz, (b) deformada en el plano yz.
De la hipótesis 3 se deduce que la componente del desplazamiento en dirección z es in-
dependiente de la componente de la posición en dirección z, es decir:
),(),,( yxwzyxw = (5.2)
Se observa que la componente del desplazamiento lineal en dirección z y los desplaza-mientos angulares xθ y a yθ son constantes para todo z, es decir, son característicos de cual-quier superficie paralela a la superficie media de la placa.
La hipótesis 5 define una relación entre los desplazamientos angulares y las primeras derivadas del desplazamiento en dirección z, de la forma:
y
w
x
wyx
∂
∂=
∂
∂= θθ , (5.3)
En otras palabras, el desplazamiento angular de una línea inicialmente normal al plano medio coincide con la pendiente de dicho plano.
Sustituyendo la ecuación anterior en la expresión (5.1) se obtiene el campo del despla-zamiento sobre la placa como:
72 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
y
yxwzzyxv
x
yxwzzyxu
∂
∂−=
∂
∂−=
),(),,(,
),(),,( (5.4)
El campo de la deformación se determina a partir de la relación entre las componentes de la deformación y del desplazamiento de la mecánica tridimensional para deformaciones infinitesimales, así:
0,0,0
2,,2
2
2
2
2
=∂
∂+
∂
∂==
∂
∂+
∂
∂==
∂
∂=
∂∂
∂−=
∂
∂+
∂
∂=
∂
∂−=
∂
∂=
∂
∂−=
∂
∂=
y
w
z
v
x
w
z
u
z
w
yx
wz
x
v
y
u
y
wz
y
v
x
wz
x
u
yzxzzz
xyyyxx
γγε
γεε
(5.5)
Las componentes de la deformación diferentes de cero se pueden organizar en una ma-triz columna de la forma:
[ ]T
T
xyyyxxyx
w
y
w
x
wzzyx
∂∂
∂
∂
∂
∂
∂−==
2
2
2
2
2
2),,( γεεε (5.6)
Se observa que la matriz columna de las deformaciones depende linealmente de la posi-ción en dirección z y de una matriz columna constate para cualquier superficie paralela al plano medio que representa a las curvaturas de la placa. A esta última se le denomina ma-triz columna de deformaciones generalizadas o de curvaturas y se expresa como:
[ ]T
T
xyyyxxyx
w
y
w
x
wyx
∂∂
∂−
∂
∂−
∂
∂−=ΦΦΦ=
2
2
2
2
2
2),(Φ (5.7)
y por lo tanto,
),(),,( yxzzyx Φε = (5.8)
Se define al operador diferencial para el problema mecánico de placas delgadas con res-pecto al sistema coordenado xy de la forma:
T
yxyx
∂∂
∂−
∂
∂−
∂
∂−=∇
2
2
2
2
2
2 (5.9)
Por lo tanto, la matriz de deformaciones generalizadas también se puede escribir de forma condensada como:
),(),( yxwyx ∇=Φ (5.10)
De la relación constitutiva para un material elástico lineal isótropo se establece que las componentes del esfuerzo cortante transversal son nulas, es decir 0== yzxz σσ . Además, al considerar despreciable el esfuerzo normal en dirección z ( 0=zzσ ) como lo indica la hipótesis 2, se puede establecer una condición plana de esfuerzos en cada uno de las super-

Análisis estructural mediante el método de los elementos finitos 73
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
ficies paralelas al plano medio de la placa. Por lo tanto, la relación entre las componentes de esfuerzo y de deformación será de la forma:
),,(),,( zyxzyx εDσ = (5.11)
siendo:
−−
=
=
)1(00
01
01
1,
21
2
ν
ν
ν
νσ
σ
σE
xy
yy
xx
Dσ (5.12)
El esfuerzo normal en dirección x genera un momento flector alrededor del eje y de la placa definido como:
dAzM xxx ∫= σ (5.13)
El momento flector alrededor del eje y por unidad de longitud en el plano de la placa ( dzdA ⋅= 1 ) como lo ilustra la Figura 5.3(a), generado por el esfuerzo normal en dirección x, está definido como:
dzzMt
txxxx ∫
+
−=
2
2σ (5.14)
El momento flector alrededor del eje x por unidad de longitud en el plano de la placa (Figura 5.3(b)), generado por el esfuerzo normal en dirección y es igual a:
dzzMt
tyyyy ∫
+
−=
2
2σ (5.15)

74 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
xxσ
(a)
2t
x
y
z dy
dx
2t
xM
x
y
z dy
dx
yyσ
(b)
2t
x
y
z dy
dx
2t
yM
x
y
z dy
dx
xyσ
(c)
x
y
z dy
dx
xyM
x
y
z dy
dx
yxσ
yxM
xxσ
(a)
2t
x
y
z dy
dx
2t
xM
x
y
z dy
dx
xxσ
(a)
2t
x
y
z dy
dx
2t
xM
x
y
z dy
dx
yyσ
(b)
2t
x
y
z dy
dx
2t
yM
x
y
z dy
dxyyσ
(b)
2t
x
y
z dy
dx
2t
yM
x
y
z dy
dx
xyσ
(c)
x
y
z dy
dx
xyM
x
y
z dy
dx
yxσ
yxM
xyσ
(c)
x
y
z dy
dx
xyM
x
y
z dy
dx
yxσ
yxM
Figura 5.3. Esfuerzos y momentos por unidad de longitud en placas: (a) esfuerzo normal en x, (b) esfuerzo normal en y, (c) esfuerzo cortante en el plano xy.
El momento torsor alrededor del eje y por unidad de longitud en el plano de la placa,
generado por el esfuerzo cortante en dirección y sobre el plano x (Figura 5.3(c)), es igual al momento torsor alrededor del eje x por unidad de longitud en el plano de la placa, generado por el esfuerzo cortante en dirección x sobre el plano y, los cuales se pueden expresar co-mo:
dzzMMt
txyyxxy ∫
+
−==
2
2σ (5.16)
Por lo tanto, se define la matriz columna de esfuerzos generalizados de flexión de la forma:
dzzdzz
M
M
Mt
t
t
t
xy
yy
xx
xy
yy
xx
σMM ∫∫+
−
+
−=
=
=2
2
2
2,
σ
σ
σ
(5.17)

Análisis estructural mediante el método de los elementos finitos 75
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
Sustituyendo las ecuaciones (5.7) y (5.11) en la expresión anterior se obtiene:
ΦDΦDεDσM ==== ∫∫∫+
−
+
−
+
−dzzdzzdzz
t
t
t
t
t
t
2
2
22
2
2
2 (5.18)
donde la matriz constitutiva elástica generalizada es igua a:
DDD12
32
2
2 tdzz
t
t== ∫
+
− (5.19)
Por lo tanto, la Ecuación (5.18) se puede expresar de la forma:
1200
0
03
33
2212
1211t
D
DD
DD
M
M
M
xx
yy
xx
xy
yy
xx
Φ
Φ
Φ
=
(5.20)
De acuerdo con el principio de los trabajos virtuales aplicado a placas, el trabajo virtual externo generado por una carga distribuidas por unidad de área q y por fuerzas puntuales
zif actuantes en dirección z, es igual a:
∑∫=
+=r
i
zii
A
E fwdAqwW1
δδδ (5.21)
para la cual, wδ es el desplazamiento virtual en dirección z en el área A y iwδ es el des-plazamiento virtual en dirección z sobre el punto i.
Siendo [ ]xyyyxx
T δγδεδεδ =ε la matriz columna de deformación virtual y σ la ma-triz columna del esfuerzo real, el trabajo virtual interno en el volumen V del sólido corres-ponde a:
∫=V
T
I dVW σεδδ (5.22)
Sustituyendo las ecuaciones que relacionan a los esfuerzos y a las deformaciones con los esfuerzos y las deformaciones generalizadas, se obtiene:
dAdA
dAdzzdAdzzdVW
A
T
A
T
A
t
t
T
A
t
t
T
V
T
I
∫∫
∫ ∫∫ ∫∫
==
===
+
−
+
−
ΦDΦMΦ
σΦσΦσε
δδ
δδδδ2
2
2
2
(5.23)
Se observa que la integral anterior está definida en el área A del plano medio de la pla-ca.
En el principio del trabajo virtual se busca la componente en z del campo del desplaza-miento o deflexión w(x,y) para todo (x,y) que pertenece al plano medio de la placa, que sa-tisface la siguiente expresión:
∑∫∫=
+=r
i
zii
AA
T fwdAqwdA1
δδδ ΦDΦ (5.24)
76 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
y las condiciones de borde naturales y esenciales, definidas por valores conocidos del desplazamiento w y de sus derivadas en subcontornos específicos del dominio.
La integración del campo del desplazamiento y del esfuerzo en el espesor de la placa, permiten reducir el dominio del problema al espacio bidimensional xy sobre su plano me-dio. Además, la teoría de placas de Kirchhoff establece que a partir de la componente en del desplazamiento w(x,y) se derivan las demás cantidades de interés.
5.1.2. Formulación en el método de los elementos finitos
Si la deflexión w(x,y) es el campo de interés en la solución del problema mecánico en el plano medio de la placa, la función de aproximación en el dominio de cada elemento finito también lo es. En general la deflexión en el interior de un elemento finito de placa se pue-de expresar mediante un polinomio de la forma:
)(26
254321 ),(),( eAyxyxxyyxyxw ∈∀++++++= Kαααααα (5.25)
Siendo )(eA el área del elemento finito bidimensional que representa el plano medio de
la placa. Con el fin de satisfacer los requisitos de continuidad C1, las primeras derivadas de la de-
flexión w o desplazamientos angulares deben definirse como funciones de aproximación adicionales del elemento finito, es decir:
K
K
+++=∂
∂=
∈∀+++=∂
∂=
yxyxy
wyx
Ayxxyyxx
wyx
y
e
x
643
)(542
2),(),(
),(2),(),(
αααθ
αααθ
(5.26)
Las coordenadas generalizadas se obtienen a partir de los valores de las tres funciones de aproximación en los nudos del elemento. Por ejemplo para el nudo i se tiene que:
K
K
K
+++=∂
∂=∂=
+++=∂
∂=∂=
++++++==
iiiiiyyi
iiiiixxi
iiiiiiiii
yxyxy
ww
xyyxx
ww
yxyxyxyxww
643
542
26
254321
2),()(
2),()(
),(
αααθ
αααθ
αααααα
(5.27)
5.1.3. Elemento rectangular de cuatro nudos no conforme MZC
La geometría más sencilla para describir el comportamiento de una placa es el rectángulo y el numero mínimo de nudos de este elemento es cuatro. Bajo tales consideraciones, el total de valores nodales del elemento es 12 y por lo tanto la función de aproximación correspon-de a un polinomio incompleto de 12 términos. Esta función corresponde a un polinomio completo de orden tres más dos términos de orden cuatro. Uno de los elementos finitos más utilizados es el desarrollado por Melosh, Zienkiewicz y Cheung también denominado elemento MZC (xxx).

Análisis estructural mediante el método de los elementos finitos 77
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
La Figura 5.4 ilustra un elemento MZC expresado en términos de un sistema coordena-do natural, el cual se relaciona con el sistema coordenado xy en el plano de la placa de la forma:
ηξ
ηη
η
ξξ
ξ
ddabdxdydA
dbdybdy
d
b
yy
b
y
dadxadx
d
a
xx
a
x
==
=→=→+
−=
=→=→+
−=
12
1
2
21
21
(5.28)
Este elemento finito cuenta con una función de aproximación de la deflexión con res-pecto a un sistema natural de coordenadas igual a:
)(312
311
310
39
28
27
26
254321
),(
),(eA
w
∈∀++++++
++++++=
ηξξηαηξαηαξαξηαηξα
ηαξαξηαηαξααηξ (5.29)
Además, las derivadas de la deflexión con respecto a las coordenadas x y y son:
)3322(1 3
122
112
92
87542 ηαηξαξαηαξηαξαηαα +++++++=∂
∂
ax
w (5.30)
)3322(1 2
123
112
1082
7643 ξηαξαηαξηαξαηαξαα +++++++=∂
∂
by
w (5.31)
Se definen tres valores nodales por cada nudo del elemento que corresponden a la de-flexión, a la primera derivada de la deflexión con respecto a x, y a la primera derivada de la deflexión con respecto a y. En otras palabras, los valores nodales para un nudo i son:
),()(,),()(,),( )()()(ii
e
iyii
e
ixii
e
iy
ww
x
wwww ηξηξηξ
∂
∂=∂
∂
∂=∂= (5.32)

78 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
x
1 2
3
)(1)( e
yw∂
)(1)( e
xw∂
ya a
b
b
ξ
η
1+=ξ
1−=η
1−=ξ
1+=η
0=η
0=ξ
4
z
)(1
ew
)(3)( e
yw∂
)(3)( e
xw∂
)(3
ew
)(2)( e
yw∂
)(2)( e
xw∂
)(2e
w
)(4)( e
yw∂
)(4)( e
xw∂
)(4e
w
)(),()( e
yw ηξ∂
)(),()( e
xw ηξ∂
( ))(,
ew ηξ
x
1 2
3
)(1)( e
yw∂
)(1)( e
xw∂
ya a
b
b
ξ
η
1+=ξ
1−=η
1−=ξ
1+=η
0=η
0=ξ
4
z
)(1
ew
)(3)( e
yw∂
)(3)( e
xw∂
)(3
ew
)(2)( e
yw∂
)(2)( e
xw∂
)(2e
w
)(4)( e
yw∂
)(4)( e
xw∂
)(4e
w
)(),()( e
yw ηξ∂
)(),()( e
xw ηξ∂
( ))(,
ew ηξ
Figura 5.4. Placa delgada: elemento finito MZC.
Despejando las doce coordenadas generalizadas de las ecuaciones de los desplazamien-
tos nodales, se obtiene a la función de aproximación en términos de los valores nodales, así:
)(4
)(4
)(4
)(4
)(4
)(4
)(3
)(1
)(3
)(3
)(3
)(3
)(2
)(2
)(2
)(2
)(2
)(2
)(1
)(1
)(1
)(1
)(1
)(1
)(
)()()()(
)()()()(e
y
e
y
e
x
e
x
ee
w
e
y
e
y
e
x
e
x
ee
w
e
y
e
y
e
x
e
x
ee
w
e
y
e
y
e
x
e
x
ee
w
e
wNwNwNwNwNwN
wNwNwNwNwNwNw
∂+∂++∂+∂++
+∂+∂++∂+∂+=
∂∂∂∂
∂∂∂∂
(5.33)
Las funciones de forma son iguales a:
)1)()(1(8
),(
)1)()(1(8
),(
)2)(1)(1(8
1),(
2)(
2)(
22)(
ξξηηηηξ
ηηξξξηξ
ηξηηξξηηξξηξ
ii
e
yi
ii
e
xi
iiii
e
wi
bN
aN
N
++−=
++−=
−−++++=
∂
∂ (5.34)
siendo,
114
113
112
111
+−
++
−+
−−
iii ηξ
(5.35)
La función de aproximación de la deflexión también se puede expresar de forma matri-cial como:
Análisis estructural mediante el método de los elementos finitos 79
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)()()( ),(),( eeew aN ηξηξ = (5.36)
Donde la matriz de funciones de forma es igual a:
[ ] [ ])()()()()(4
)(3
)(2
)(1)( , e
yi
e
xi
e
wi
e
i
eeee
e NNN ∂∂== NNNNNN (5.37)
y el vector de valores nodales de desplazamiento corresponde a:
∂
∂=
=)(
)(
)(
)(
)(4
)(3
)(2
)(1
)(
)(
)(,e
iy
e
ix
e
i
e
i
e
e
e
e
e
w
w
w
a
a
a
a
a
a (5.38)
La matriz columna de la deformación generalizada indicada en la Ecuación (5.7), se de-fine en el interior del elemento finito como:
∂∂
∂−
∂
∂−
∂
∂−
=
yx
w
y
wx
w
e
e
e
e
)(2
2)(
2
2)(
2
)(
2
Φ (5.39)
Asimismo, reemplazando la Ecuación (5.36) en la expresión (5.10), se obtiene:
)()()()()()( eeeeee w aBaNΦ =∇=∇= (5.40)
donde, el operador diferencial actuando sobre funciones de forma es igual a:
[ ]
∂∂
∂−
∂∂
∂−
∂∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−
=
=
∂∂
∂∂
∂∂
yx
N
yx
N
yx
N
y
N
y
N
y
N
x
N
x
N
x
N
e
yie
xi
e
wi
e
yie
xi
e
wi
e
yie
xi
e
wi
e
i
eeee
e
)(2)(2)(2
2
)(2
2
)(2
2
)(2
2
)(2
2
)(2
2
)(2
)(
)(4
)(3
)(2
)(1)(
222
B
BBBBB
(5.41)
Dado que cada función de forma ),()( ηξe
iN• depende de las coordenadas naturales, sus
segundas derivadas con respecto a los ejes coordenados x y y corresponden a:

80 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
ηξηξ ∂∂
∂=
∂∂
∂
∂
∂=
∂
∂
∂
∂=
∂
∂ ••••••)(2)(2
2
)(2
22
)(2
2
)(2
22
)(2 1,
1,
1 e
i
e
i
e
i
e
i
e
i
e
i N
abyx
NN
by
NN
ax
N (5.42)
Sustituyendo las funciones de forma dadas en la Ecuación (5.34) se obtiene:
)123(81
)3)(1(4
1,0
)123(81
0,)3)(1(4
1
)334(8
1
)1(4
3,)1(
4
3
2)(2
2
)(2
2
)(2
2)(2
2
)(2
2
)(2
22)(2
22
)(2
22
)(2
−+=∂∂
∂
++=∂
∂=
∂
∂
−+=∂∂
∂
=∂
∂++=
∂
∂
−−=∂∂
∂
+−=∂
∂+−=
∂
∂
∂
∂∂
∂
∂∂
ηηηξ
ηηξξ
ξξξη
ξξηη
ηξηξ
ξξηηηηξξ
ii
e
yi
ii
e
yi
e
yi
ii
e
xi
e
xiii
e
xi
ii
e
wi
ii
e
wiii
e
wi
ayx
N
by
N
x
N
byx
N
y
N
ax
N
abyx
N
by
N
ax
N
(5.43)
En el marco del principio de los trabajos virtuales, se define la deflexión virtual y la de-formación generalizada virtual en el interior de un elemento, dado el vector de desplaza-mientos nodales virtuales )(eaδ como:
)()()()()()( , eeeeeew aBΦaN δδδδ == (5.44)
Sustituyendo las expresiones anteriores en la Ecuación (5.24) y considerando que el dominio del problema A es igual a la sumatoria de los subdominios )(e
A de los m elementos finitos que conforman la malla, se tiene:
)(
1)()()()(
1)()()()(
)()(
nTm
e A
e
T
e
T
ee
m
e A
ee
T
e
T
eee
dAqdA faNaaBDBa δδδ +
=
∑ ∫∑ ∫
==
(5.45)
donde y corresponden a los vectores de desplazamiento nodal virtual y de fuerza en los nudos de la malla de elementos finitos. El vector de desplazamientos nodales virtuales aδ contiene el desplazamiento lineal en z y los desplazamientos angulares alrededor de x y de y por cada nudo de la malla. Asimismo, el vector de fuerzas nodales )(n
f incluye la carga en dirección z y los momentos aplicados alrededor de los ejes x y y por cada nudo de la red de elementos finitos. El producto )(nTfaδ indica el trabajo virtual externo realizado por car-gas y momentos aplicados en los nudos de la malla.
El término entre paréntesis a la izquierda de la igualdad anterior se definen como la ma-triz de rigidez del elemento )(e
K , mientras que el término entre paréntesis a la derecha es el vector de fuerzas nodales equivalentes a la acción de una carga distribuida )(eq en el ele-mento )(e
f , es decir:

Análisis estructural mediante el método de los elementos finitos 81
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
∫=)(
)()()()(
eA
ee
T
e
e dABDBK (5.46)
∫=)(
)()()(
eA
e
T
e
e dAqNf (5.47)
Reemplazando las ecuaciones anteriores en la expresión (5.45) se tiene que:
0)(
1
)()()(
1
)()( =−−∑∑
==
nTm
e
eT
ee
m
e
eT
e fafaaKa δδδ (5.48)
La ecuación anterior se puede escribir en términos del vector de desplazamiento virtual aδ y del vector de desplazamiento real a en los nudos de la malla de elementos finitos, de
tal forma que:
0=− faKaa TT δδ (5.49)
donde K es la matriz de rigidez de la placa obtenida del ensamblaje de las matrices de rigidez de los elementos finitos, de la forma:
=
=
)(
1)(
em
e
KK A (5.50)
y f es el vector de fuerzas nodales de la malla resultante del ensamblaje de los vectores de fuerza nodales equivalentes de cada uno de los elementos finitos más el vector de fuer-zas nodales aplicadas en los nudos de la malla, es decir:
)()(
1)(
nem
e
fff +
=
=A (5.51)
Cancelando el factor común Taδ de la Ecuación (5.49), se tiene que:
0fKa =− (5.52)
La matriz de rigidez del elemento finito )(eK definida en la Ecuación (5.46), se puede
expresar en términos de submatrices por nudo de la forma:
)4,3,2,1,()(
)()(
)()(
)(44
)(34
)(33
)(24
)(23
)(22
)(14
)(13
)(12
)(11
)(
==
=
∫ jidA
sim
eA
e
je
Te
i
e
ij
e
ee
eee
eeee
e
BDBK
K
KK
KKK
KKKK
K
(5.53)

82 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
y el vector de fuerzas nodales equivalentes a la acción de una carga distribuida )(eq ex-presada en la Ecuación (5.47) es igual a:
∫ ∫∫∫+
−
+
−==
=1
1
1
1 )()(
)()()(
)(4
)(3
)(2
)(1
)(
)(
, ηξ ddabqdydxq e
Te
i
A
e
Te
i
e
i
e
e
e
e
e
e
NNf
f
f
f
f
f (5.54)
xxx
Figura 5.5. Placa delgada: matriz de rigidez del elemento finito MZC.
Después de obtener el vector de desplazamientos nodales de la malla mediante la Ecua-
ción (5.52), se calculan los esfuerzos generalizados o momentos por unidad de longitud en el punto ),( ηξ del interior del elemento así:

Análisis estructural mediante el método de los elementos finitos 83
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010
)()()()()()( ),(),(),( eeeeee aBDΦDM ηξηξηξ == (5.55)
donde 123)()( tee DD = .
Los esfuerzos generados por los momentos flectores y torsores por unidad de longitud a una distancia z del plano medio se determinan de la forma:
)(3)()(
3
)()()(
3
)(
)()(
3
)()()(
3
)()()(
3
)(
12
1212
121212
eeeeeee
eeeeeeeee
t
ztz
tz
zt
ztt
MσσMεDM
ΦDMΦDMΦDM
=→=→=
=→=→=
(5.56)
El elemento MZC se denomina no conforme porque las pendientes de las normales al plano medio, es decir las primeras derivadas de la deflexión, son incompatibles sobre los lados del elemento, a pesar de ser continuas en los nudos. La primera derivada de la de-flexión a lo largo de un lado varia de forma cúbica y no está definida de manera única por los dos valores nodales de los extremos del lado. Se recuerda que dos valores nodales de-terminan una variación lineal, tres valores nodales definen una variación cuadrática, etcéte-ra (Weaver & Johnson 1984).
5.1.4. Elemento rectangular de cuatro nudos conforme BFS
Una forma de asegurar la compatibilidad de las primeras derivadas de la deflexión sobre los lados del elemento, consiste en satisfacer la continuidad de la segunda derivada cruzada de la deflexión
yx
w
∂∂∂ 2
. Para ello, Bogner, Fox y Schmidt (xxx) han propuesto el elemento finito rectangular BFS, el cual cuenta con una función de aproximación de la deflexión polinómi-ca de 16 términos de la forma:
)(
3316
2315
3214
2213
312
311
310
39
28
27
26
254321
),(
),(
eA
w
∈∀
++++++++
++++++++=
ηξ
ηξαηξαηξαηξαξηαηξαηαξα
ξηαηξαηαξαξηαηαξααηξ
(5.57)
A diferencia del elemento MZC, este elemento tiene cuatro variables definidas por nu-do: la deflexión w, las primeras derivadas
y
w
x
w
∂∂
∂∂ , , y la segunda derivada cruzada
yx
wxyw ∂∂
∂=∂22 .
Por lo tanto la función de aproximación se puede expresar en términos de los valores noda-les como:
)(4
2)(4
)(4
)(4
)(4
)(4
)(4
)(4
)(3
2)(3
)(3
)(1
)(3
)(3
)(3
)(3
)(2
2)(2
)(2
)(2
)(2
)(2
)(2
)(2
)(1
2)(1
)(1
)(1
)(1
)(1
)(1
)(1
)(
)()()(
)()()(
)()()(
)()()(
e
xy
e
yx
e
y
e
y
e
x
e
x
ee
w
e
xy
e
yx
e
y
e
y
e
x
e
x
ee
w
e
xy
e
yx
e
y
e
y
e
x
e
x
ee
w
e
xy
e
yx
e
y
e
y
e
x
e
x
ee
w
e
wNwNwNwN
wNwNwNwN
wNwNwNwN
wNwNwNwNw
∂+∂+∂++
+∂+∂+∂++
+∂+∂+∂++
+∂+∂+∂+=
∂∂∂∂
∂∂∂∂
∂∂∂∂
∂∂∂∂
(5.58)
….

84 Capítulo 5. Formulación de estructuras laminares elásticas lineales
© Dorian Luis Linero Segrera – Universidad Nacional de Colombia, 2010

Referencias
Bathe, K. (1996). Finite elements procedures. New Jersey, Prentice Hall. Cook, R., Malkus, D. & Plesha, M. (1989). Concepts and applications of finite elements
analysis. New York, John Wiley & Son. Hughes, T. J. R. (2000). The finite element method. New York, Dover. Mase, G. T. & Mase, G. E. (1999). Continuum mechanics for engineers. London, CRC Pre-
ss. Oñate, E. (1995). Cálculo de estructuras por el método de los elementos finitos. Barcelona,
Centro Internacional de Métodos Numéricos en Ingeniería. Oñate, E. (2009). Structural Analysis with the Finite Element Method, CIMNE - Springer. Oñate, E. & Zárate, F. (2000). Introducción al método de los elementos finitos. Barcelona,
Centro Internacional de Métodos Numéricos en Ingeniería. Ortiz, L. (1998). Elasticidad. Madrid, Mc Graw Hill. Segerlin, L. (1984). Applied Finite Element Analysis. New York, Jhon Wiley & Son. Spencer, A. J. M. (1990). Continuum mechanics. London, Longman Scientific & Technical. Timoshenko, S. P. & Goodier, J. (1970). Theory of Elasticity, Mc Graw Hill. Weaver, J. & Johnson, C. (1984). Finite elements for structural analysis. New Jersey, Pren-
tice Hall. Zienkiewicz, O. (1980). El método de los elementos finitos. Barcelona, Editorial Reverté.