Ejerciciose de Análisis de Señales y Sistemas
8
ESCUELA POLITECNICA NACIONAL ÁNALISIS DE SEÑALES Y SISTEMAS DEBER #1 GR5 NOMBRES: -CRISTÓBAL CAÑARTE -ALEJANDRO PACCHA 2. Dado f 2 [ n ], encuentre y grafique: a) f 2 [−n +2 ] Se conocequef 2 [ n ]=− δ ( n ) +δ ( n−1 ) +2 δ ( n−2) Entoncesf 2 [ −n+2 ]=−δ ( −n+2 ) +δ ( (− n+2 )−1 )+2 δ (( −n+2 )− 2)
description
Ejercicios acerca de la obtencion de salida de un sistema en base a la entrada, metodos basicos
Transcript of Ejerciciose de Análisis de Señales y Sistemas

ESCUELA POLITECNICA NACIONAL
ÁNALISIS DE SEÑALES Y SISTEMAS
DEBER #1
GR5
NOMBRES:
-CRISTÓBAL CAÑARTE
-ALEJANDRO PACCHA
2. Dado f 2[n], encuentre y grafique:
a) f 2 [−n+2 ]
Seconoce que f 2 [n ]=−δ (n )+δ (n−1 )+2δ (n−2 )Entonces f 2 [−n+2 ]=−δ (−n+2 )+δ ( (−n+2 )−1 )+2δ ( (−n+2 )−2 )⇒ f 2 [−n+2 ]=−δ (−n+2 )+δ (−n+1 )+2δ (−n )⇒ f 2 [−n+2 ]=−δ ( n−2 )+δ (n−1 )+2δ (n)

b)∆ f 2 [n ]∆ f 2 [n ]=f 2 [n+1 ]−f 2 [n ]¿ [−δ (n+1 )+δ ( (n+1 )−1 )+2δ ( (n+1 )−2 ) ]−[−δ (n )+δ (n−1 )+2δ (n−2 ) ]
¿−δ (n+1 )+δ (n )+2δ (n−1 )+δ (n )−δ (n−1 )−2δ (n−2 )∆ f 2 [n ]=2δ (n )+δ (n−1 )−2δ (n−2 )−δ (n+1)
4. Dado f 1 ( t ) encuentre y grafique:
a) y ( t )=f 1 ( t−1 )−f 1 ( t−2 )Seconoce que f 1 (t )=−t∗(u (t )−u (t−1 ) )+(t−1 )∗(u (t−1 )−u (t−2 ) )f 1 ( t−1 )=−( t−1 )∗[u ( t−1 )−u ( ( t−1 )−1 ) ]+( ( t−1 )−1 )∗[u ( ( ( t−1 )−1 )−u ( (t−1 )−2 ) ) ]f 1 (t−1 )=−(t−1 )∗[u ( t−1 )−u (t−2 ) ]+( t−2 )∗[u ( t−2 )−u ( t−3 ) ]f 1 ( t−2 )=−(t−2 )∗[u ( t−2 )−u ( (t−2 )−1 ) ]+( (t−2 )−1 )∗[u ( (t−2 )−1 )−u ( (t−2 )−2 ) ]

f 1 ( t−2 )=−( t−2 )∗[u ( t−2 )−u (t−3 ) ]+ ( t−3 ) [u ( t−3 )−u (t−4 ) ] y ( t )=f 1 ( t−1 )−f 1 (t−2 )
y ( t )=−( t−1 )∗[u ( t−1 )−u (t−2 ) ]+2 ( t−2 )∗[u (t−2 )−u ( t−3 ) ]−( t−3 ) [u ( t−3 )−u ( t−4 ) ]
b¿ y (t )=δ (t−32 )∗f 1 ( t )+ f 1 (−t )∗u (t)Debido a que f 1(−t) es ≠0 si t<0 y u(t)=0 si t<0, el
término de la izquierda se anula.
Debido a la propiedad de impulso δ (t−32 )∗f 1 (t )=δ (t−32 )∗f 1( 32 )f 1(32 )=12Por lo tanto y (t )=1
2∗δ(t−32 )
6. Indique por lo menos 2 características de los siguientes sistemas:
a)y (t )=x2 ( t )∗u (t )
Sistema continuo, causal.
b)y [n ]=x [n+1 ]−x [−n+1]
Sistema Discreto Aditivo.

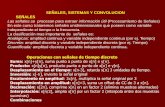
8) Si se conoce que la respuesta de un sistema lineal invariante en el tiempo a la señal discretax [n]=n∗U [n ]es la señal y [n]=(2n−1)∗U [n], encontrar la respuesta del sistema a la señaly 1[n]=f 2[n−2]∗U [n−2].
f 2[n−2]∗U [n−2]
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Y 1=−U [n−2 ]+2U [n−3 ]+U [n−4 ]−2U [n−5]
Como:
G [n ]=∇ γ [n ]=γ [n ]−γ [n−1]
γ [n ]=(2n−1 )∗U [n ]
γ [n−1 ]=(2n−3 )∗U [n−1 ]
G [n ]=−δ [n ]+2U [n−1]
Y 1=−U [n−2 ]+2U [n−3 ]+U [n−4 ]−2U [n−5 ]
Y 1=+δ [n−2 ]−2U [n−3 ]−2δ [n−3 ]+2U [n−4 ]−δ [n−4 ]+2U [n−5 ]+2δ [n−5 ]−4U [n−6 ]
Y 3[n]Y 1 [n]=f 2 [n−2]∗U [n−2]
X [n ]=n∗U [n] Y [n ]=(2n−1 )∗U [n ]=γ [n]
H

Y 1=δ [n−2 ]−4δ [n−3 ]−δ [n−4 ]+4δ [n−5 ]−2U [n−5 ]
10. Obtenga la solución a la ecuación diferencial y’’(t)+5y’(t)+6y(t)=x(t)+x’(t)
Considere SIR
siendo x(t)={0 t<0 }
¿
sol homogenea:
α 2+5α+6=0
(α+3 ) (α+2 )=0
α❑1=−3 ;α❑2=−2
yn=A❑1e−2 t+A❑2e
−3 t
Sol particular:
para t ≥0
x (t)= [sen (πt )+e−3 t ] x¿ (discontinuidad=1)
x ' (t)=πcos (πt)−3e−3 t+δ(t )
x (t)+x ' (t)=sen (πt)+πcos (πt)−2e−3 t+δ(t )
yp (t)=c0 sen(πt)+c1 cos(πt)+c2 e−3t
yp❑1(t )=c0 sen (πt )+c1cos (πt)
yp❑2(t )=c2e−3 t (pertenece a yn)
yp❑3(t )=δ (t) (impulso)

yp❑1(t ):
(6) yp❑1(t)=c0 sen(πt )+c1 cos(πt)
(5) yp ' 1( t)=πc0cos (πt)−π c1 sen(πt )
(1) yp ' ' 1( t)=−π❑2 c0 sen(πt)−π❑2c1cos (πt)
suma:
sen(πt)+πcos(πt)=(6 c0−5π c1−π❑2c0)sen (πt )+(6 c1+5π c0−π❑2 c1)sen (πt)
c0(6−π❑2)−c1(5 π )=1
c0(5 π )−c1(6−π❑2)=π
c0=0,1738
c1=−0,2350
IMPULSO:
y’’ y’ y
(δ (t)¿+5( )+6( )=δ (t )
D❑1=1 D❑2=0

D❑1=1=y ' ¿ ; y ' ¿=0 (SIR) ; y ' ¿=1 (condiciones iniciales)
D❑2=0=y ¿ ; y ¿=0 (SIR) ; y ¿=0 (condiciones iniciales)
yp (t)=0,1738. sen(πt )−0,2350. cos (πt )
y (t )= yn(t )+ yp(t)
y (t )=A❑1 e−2 t+A❑2e
−3 t+0,1738. sen(πt)−0,2350.cos (πt)
y ' (t )=−2 A❑1e−2 t−3 A❑2e
−3 t+π 0,1738. cos(πt )+π 0,2350. sen(πt)
y ¿
y ' ¿
A❑1=0,159
A❑2=0,076
y (t )=0,159 e−2 t+0,076 e−3 t+0,1738. sen(πt)−0,2350.cos (πt)