
SEÑALES, SISTEMAS Y CONVOLUCION SEÑALES...
25
SEÑALES, SISTEMAS Y CONVOLUCION SEÑALES Las señales se procesan para extraer información útil (Procesamiento de Señales) En este curso trataremos señales unidimensionales que poseen como variable independiente el tiempo o la frecuencia. La clasificación mas importante de señales es: Analógicas: amplitud continua y variable independiente continua (por ej. Tiempo) Discreta: amplitud discreta y variable independiente discreta (por ej. Tiempo) Cuantificada: amplitud discreta y variable independiente continua. Operaciones con señales de tiempo discreto Suma: x[n]+y[n], suma punto a punto de x[n] e y[n]. Producto: x[n]y[n], producto punto a punto de x[n] e y[n]. Desplazamiento en el tiempo: x[n-3], retarda x[n] 3 unidades de tiempo. Inversión: x[-n], invierte la señal original Escalamiento en amplitud: 3x[n], multiplica la señal original por 3 Desplazamiento en amplitud: x[n]+3, suma un offset de CC de 3 a x[n]. Decimación: x[2n], comprime x[n] en un factor 2 (elimina muestras alternadas) Interpolación: x[n/2], amplia x[n] por un factor 2 (interpola entre dos muestras sucesivas) Combinaciones
Transcript of SEÑALES, SISTEMAS Y CONVOLUCION SEÑALES...
SEÑALES, SISTEMAS Y CONVOLUCION
SEÑALES
Las señales se procesan para extraer información útil (Procesamiento de Señales)
En este curso trataremos señales unidimensionales que poseen como variable
independiente el tiempo o la frecuencia.
La clasificación mas importante de señales es:
Analógicas: amplitud continua y variable independiente continua (por ej. Tiempo)
Discreta: amplitud discreta y variable independiente discreta (por ej. Tiempo)
Cuantificada: amplitud discreta y variable independiente continua.
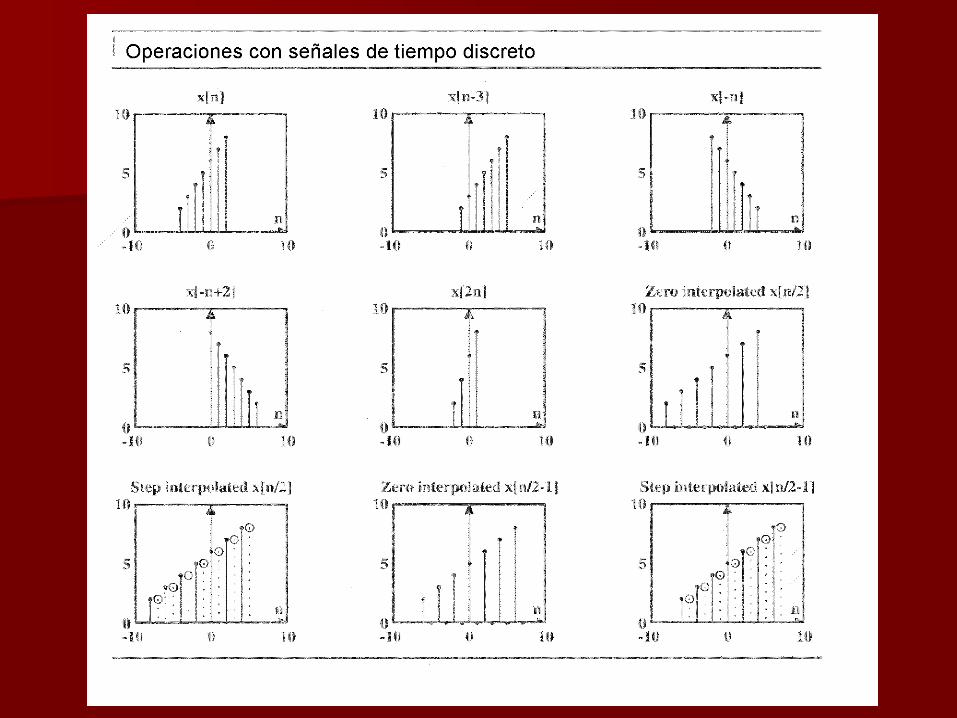
Operaciones con señales de tiempo discretoSuma: x[n]+y[n], suma punto a punto de x[n] e y[n].Producto: x[n]y[n], producto punto a punto de x[n] e y[n].Desplazamiento en el tiempo: x[n-3], retarda x[n] 3 unidades de tiempo.Inversión: x[-n], invierte la señal originalEscalamiento en amplitud: 3x[n], multiplica la señal original por 3Desplazamiento en amplitud: x[n]+3, suma un offset de CC de 3 a x[n].Decimación: x[2n], comprime x[n] en un factor 2 (elimina muestras alternadas)Interpolación: x[n/2], amplia x[n] por un factor 2 (interpola entre dos muestras sucesivas)Combinaciones
Interpolar una señal por un factor N muestrear con ts/N. Además existen
distintos tipos de interpolación: cero, escalón y lineal.
La interpolación no es la inversa de la decimación,
x[n]=1 2 6 4 8 dec.x[2n]=1 6 8 interp. 1 1 6 6 8 8
La decimación es la inversa de la interpolación
x[n]=1 2 6 4 8 interp.x[n/2]=1 1 2 2 6 6 8 8 dec. x[n]=1 2 6 4 8
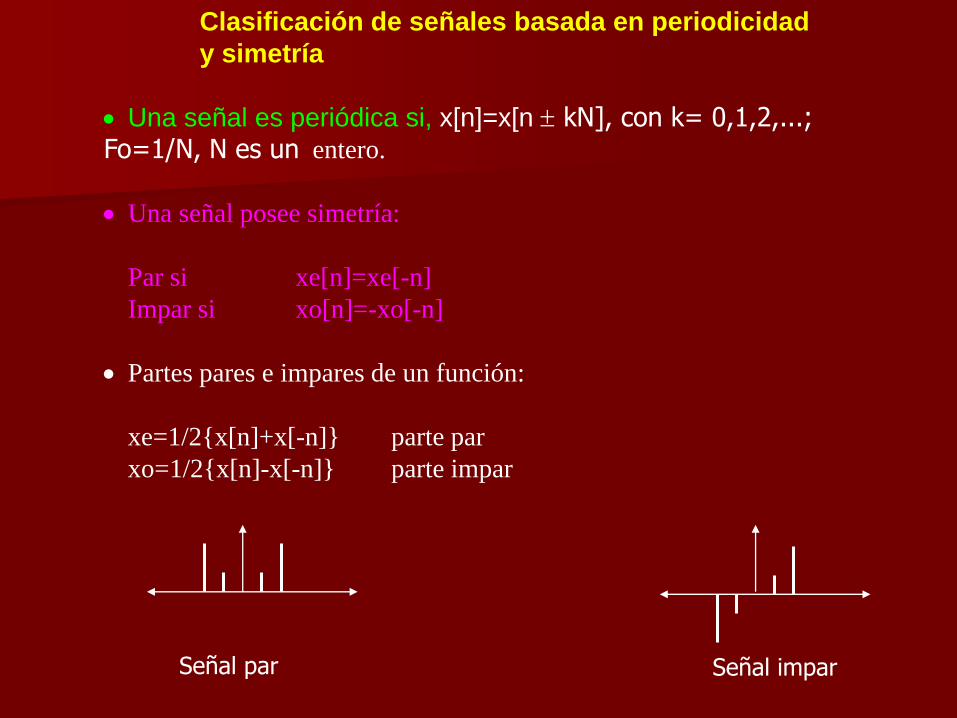
Clasificación de señales basada en periodicidad
y simetría
Una señal es periódica si, x[n]=x[n kN], con k= 0,1,2,...; Fo=1/N, N es un entero.
Una señal posee simetría:
Par si xe[n]=xe[-n]
Impar si xo[n]=-xo[-n]
Partes pares e impares de un función:
xe=1/2{x[n]+x[-n]} parte par
xo=1/2{x[n]-x[-n]} parte impar
Señal par Señal impar
knnxn
knknnunn
0
-1 0 1 1 2
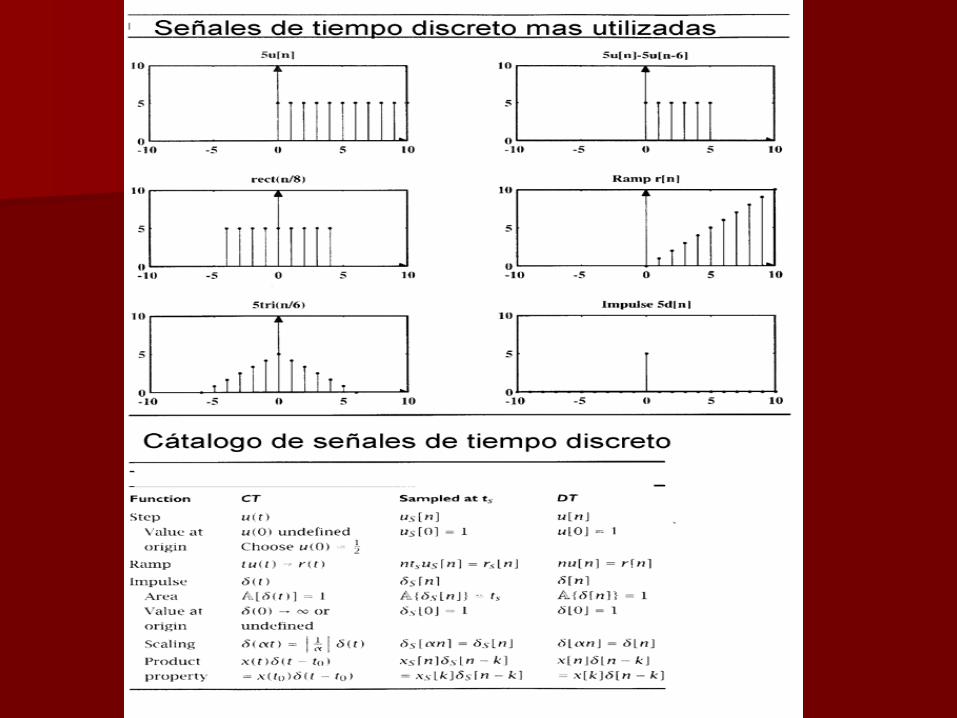
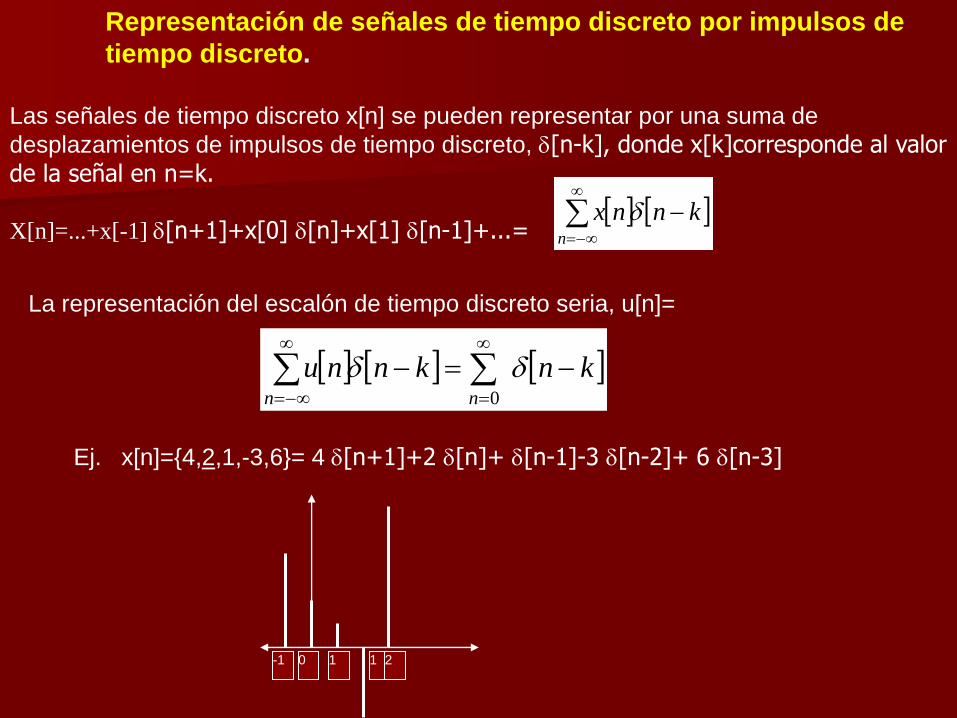
Representación de señales de tiempo discreto por impulsos de
tiempo discreto.
Las señales de tiempo discreto x[n] se pueden representar por una suma de
desplazamientos de impulsos de tiempo discreto, [n-k], donde x[k]corresponde al valor
de la señal en n=k.
X[n]=...+x[-1] [n+1]+x[0] [n]+x[1] [n-1]+...=
La representación del escalón de tiempo discreto seria, u[n]=
Ej. x[n]={4,2,1,-3,6}= 4 [n+1]+2 [n]+ [n-1]-3 [n-2]+ 6 [n-3]
Función sinc de tiempo de discreto
La función sinc es una de las funciones mas importantes dentro del Procesamiento de señales, y esta definida,
Sinc(n/N)=sen(n/N)/(n/N)
Observaciones:
sinc (n/N)=0, n=kN, k= 1, 2,...
sinc (n)= [n]
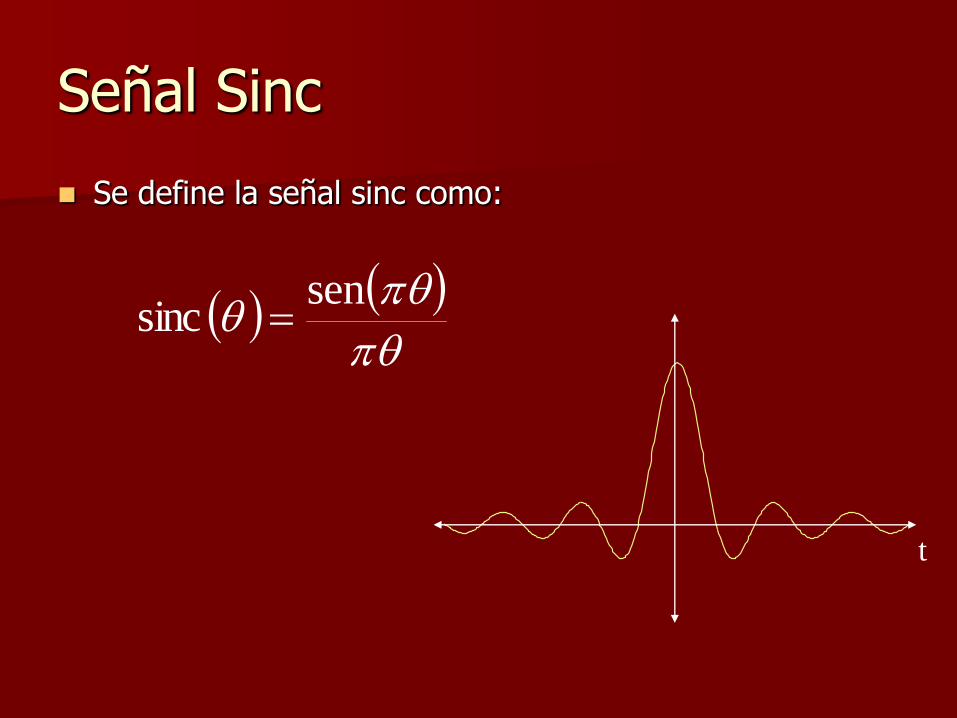
Señal Sinc
Se define la señal sinc como:
sensinc
sin(x)/x
t
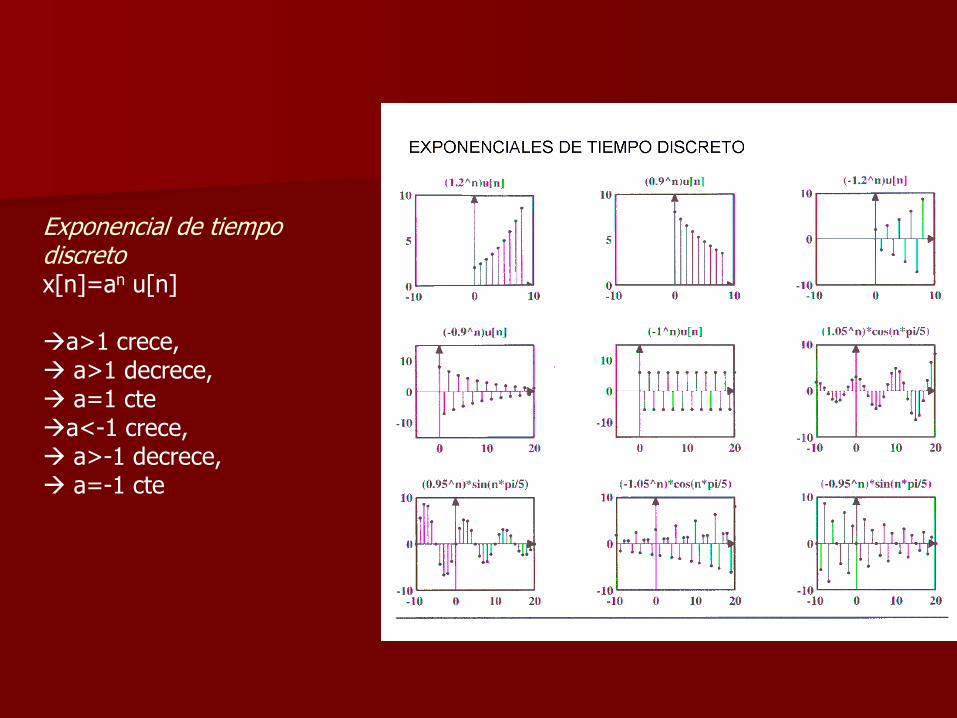
Exponencial de tiempo discretox[n]=an u[n]
a>1 crece, a>1 decrece, a=1 ctea<-1 crece, a>-1 decrece, a=-1 cte
Frecuencia digital
Existe un parámetro muy importante en el análisis de señales de tiempo discreto denominado Frecuencia Digital y la cual se define en función del período de muestreo utilizado para obtener la señal discreta a partir de una señal continua.
Frecuencia digital F=f/Sf
donde Sf=1/ts es la frecuencia de muestreo, además =2F es la frecuencia digital angular.
DEFINICIONES
Periodicidad y Frecuencia de señales armónicas de tiempo discreto.
En señales de tiempo discreto no todas las armónicas de una señal periódica son periódicas.
x[n]=e(j2Fn) , x[n+N]= e(j2F(n+N)) = e(j2Fn) e(j2FN)
=1 si FN=entero
Por lo tanto para que exista periodicidad se debe cumplir que FN=k=entero, las armónicas de tiempo discreto son periódicas si F=f/Sf es una fracción racional de la forma k/N.
Por ej.
x[n]=cos(2n/16) es una señal periódica de período N=16
x[n]=cos(n/2), 2nF=n/2 F=1/4, número no racional, por lo tanto x[n] es
no periódica.
ObservacionesSi F no es función racional no hay periodicidad
Rango principal de una señal
Si se considera una sinusoide de tiempo discreto x[n]= cos(2F n+), cuya frecuencia digital tiene una parte entera M y una parte fraccional Fr tal que Fr<1/2 entonces,
x[n]=cos[2(M+Fr)n+]=cos(2 Fr n+),
si Fr es (-),x[n]= cos(-2 Fr n+)= cos(2 Fr n-) fase reversible.
Ej.a) x[n]=cos[2(10/3)n+], F=10/3, M=3, Fr=1/3, x[n]=cos[2(1/3)n+]
b) x[n]=cos[2(8/3)n+], F=8/3, M=3, Fr=-1/3, x[n]=cos[-2(1/3)n+],x[n]=cos[2(1/3)n-]
Sistemas
Un sistema físico es una interconexión de dispositivos y elementos sujetos a leyes físicas.
Sistemas Analógicos Discretos
Sistemas: Análisis, Modelos y Síntesis.
Operadores de tiempo discreto
El operador de tiempo discreto mas utilizado es el operador retardo z-1,z-1x[n]=y[n]=x[n-1]
Ej. y[n]=4 z3 x [n]+6=4 x[n+3]+6
Respuesta impulsiva de filtros digitales
¿Porqué es importante la respuesta impulsiva de un sistema?
Existen dos formas de representar un sistema físico, en el dominio de la
frecuencia y en el dominio del tiempo. En el primer caso se trata de la
respuesta en frecuencia, la que veremos mas adelante cuando analicemos la
transformada de Fourier y en el segundo a través de la respuesta al impulso de
un sistema.
Si se suman infinitos términos cosenoidales cuya frecuencia varia de 0 a
infinito, se obtiene una señal impulsiva, por lo tanto aplicar un impulso a la
entrada de un sistema es equivalente a aplicar infinitos cosenos con un rango
infinito de frecuencias, entonces el resultado que se obtiene es representativo
del sistema físico bajo estudio.
¿A partir de conocer la respuesta impulsiva de un sistema puedo calcular la
respuesta para cualquier entrada?
Si, efectivamente.
Respuesta impulsiva de filtros no recursivos
Un filtro no recursivo de longitud M+1 se describe por,
y[n]= B0 x[n]+B1 x[n-1]+...+BM x[n-M]
SI x[n]=[n], la respuesta impulsiva es,
h[n]= B0 [n]+B1 [n-1]+...+BM [n-M]
Los filtros digitales pueden ser considerados sistemas de tiempo discreto, la expresión general es,
y[n]+A1 y[n-1]+...+AN y[n-N]=B0 x[n]+B1 x[n-1]+...+BM x[n-M]esta es la expresión de un filtro recursivo de orden N, el cual posee una
respuesta impulsiva h[n]de longitud infinita (IIR)
Si todos los coeficientes Ak son 0, se transforma en la expresión de un filtro no recursivo descritpto por,
y[n]= B0 x[n]+B1 x[n-1]+...+BM x[n-M]Este filtro posee una respuesta impulsiva finita (FIR) al no existir recursividad.
Estabilidad de sistemas lineales invariantes en tiempo discreto
Un sistema lineal invariante en tiempo discreto es estable si las raices de su ecuación característica tienen todas modulo menor a 1
Ej. y[n]-1/6 y[n-1]-1/6 y[n-2]=x[n],Su ecuación característica es: z2-1/6 z-1/6 =0 Con raíces z1=1/2, z2=-1/3 por lo tanto el sistema es estable.
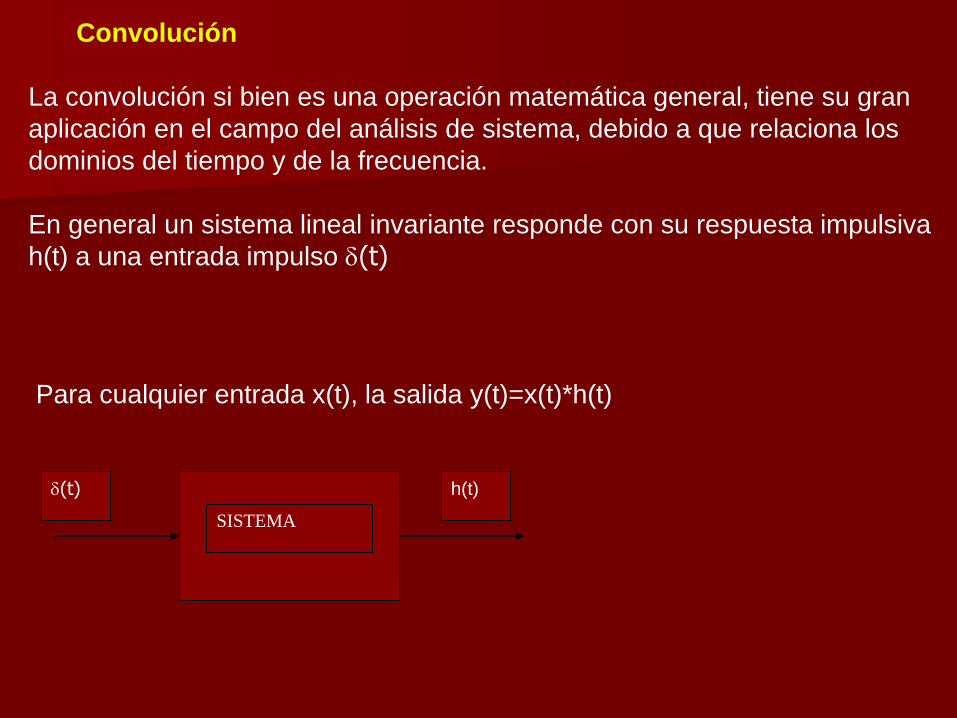
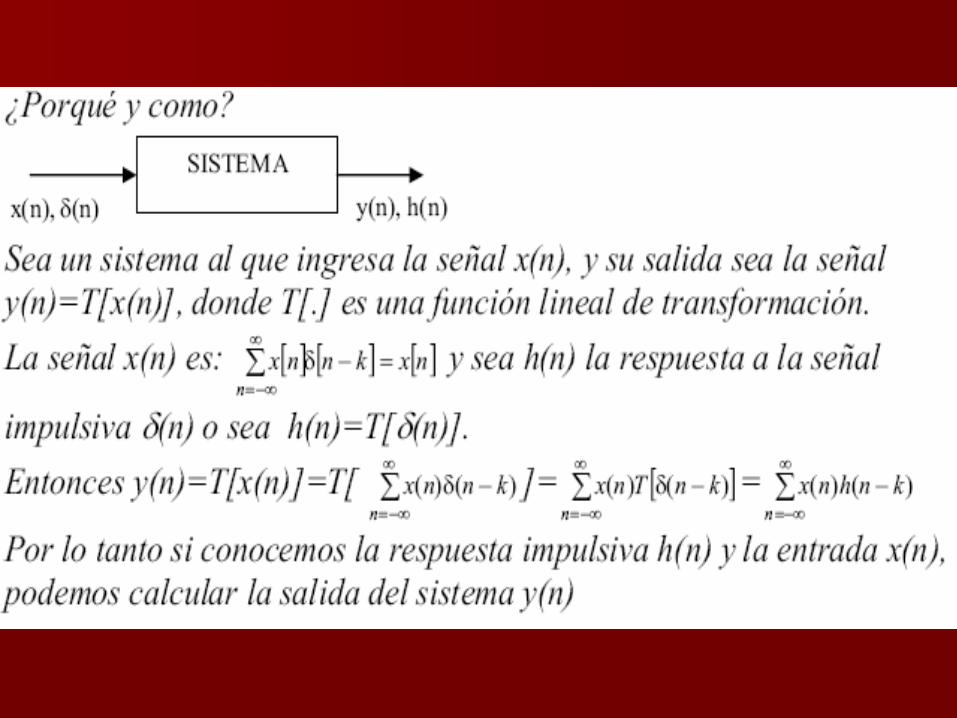
Convolución
La convolución si bien es una operación matemática general, tiene su gran
aplicación en el campo del análisis de sistema, debido a que relaciona los
dominios del tiempo y de la frecuencia.
En general un sistema lineal invariante responde con su respuesta impulsiva
h(t) a una entrada impulso (t)
(t) h(t)
SISTEMA
Para cualquier entrada x(t), la salida y(t)=x(t)*h(t)
)()(1
)( TtutuT
th
t
Tt
xT
thxthtxty )(1
)()()(*)()(
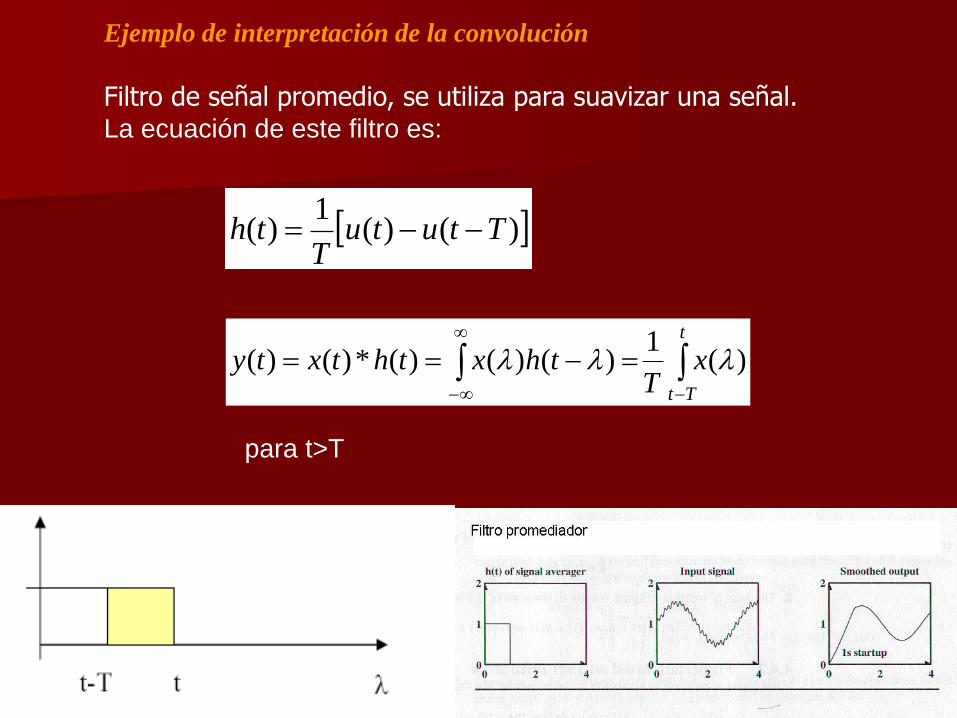
Ejemplo de interpretación de la convolución
Filtro de señal promedio, se utiliza para suavizar una señal.La ecuación de este filtro es:
,
para t>T
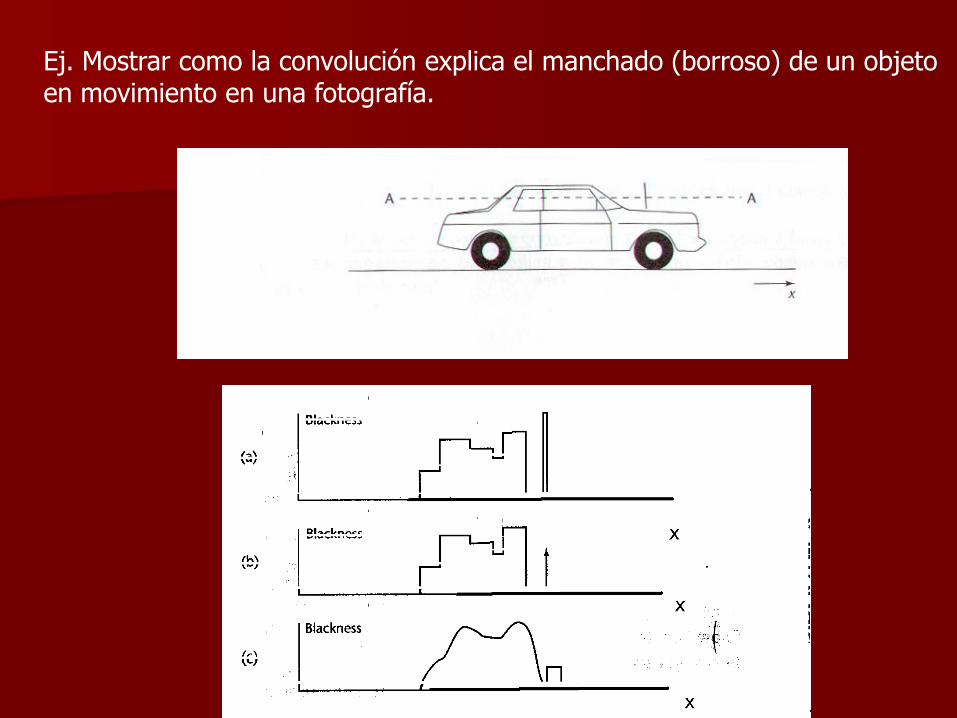
Ej. Mostrar como la convolución explica el manchado (borroso) de un objeto en movimiento en una fotografía.
k
Convolución Discreta
En este curso nosotros prestaremos especial atención a la convolución
discreta la cual posee una interpretación análoga a la del caso continuo,
solo que se aplica a señales de tiempo discreto, esta se define como,
y[n]=x[n]*h[n]= x[k]h[n-k]
k
k
Correlación
La correlación es una operación similar a la convolución, la mide el grado de
dependencia entre dos señales. Cuando se trabaja con una misma señal desplazada en
el tiempo se denomina autocorrelación y cuando se trabaja con dos señales diferentes
se denomina intercorrelación o correlación cruzada.
En procesamiento de señales tiene mas aplicación la correlación cruzada la cual revela
el grado de similitud entre dos señales.
Al igual que la función convolución la correlación se puede definir en el campo continuo
y en el campo discreto, en este curso trabajaremos con la correlación discreta.
Definición:
Autocorrelación: Rxx= x[k]x[k-n] = x[n]*x[-n],
cuando k0 Rxx es máxima, cuando k , Rxx
es mínima.
Correlación cruzada: Rxy= x[k]y[k-n] = x[n]*y[-n], n=0,1, 2,...
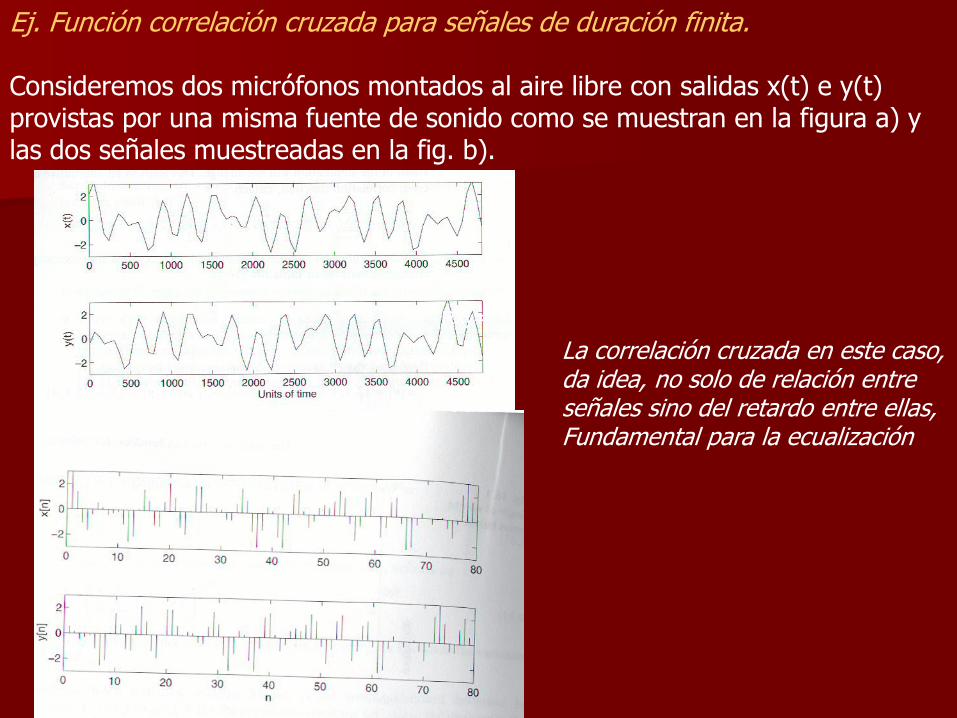
Ej. Función correlación cruzada para señales de duración finita.
Consideremos dos micrófonos montados al aire libre con salidas x(t) e y(t) provistas por una misma fuente de sonido como se muestran en la figura a) y las dos señales muestreadas en la fig. b).
Rxy=
x[k]y[k-n]
Rxy=
x[k]y[k-n]
La correlación cruzada en este caso, da idea, no solo de relación entre señales sino del retardo entre ellas, Fundamental para la ecualización
Ej. Identificación de sistemas
Un requerimiento común en el procesamiento de señales es caracterizar un sistema desconocido, determinando su respuesta impulsiva. De cualquier manera para obtenerla seria necesario una señal impulsiva la cual tiene amplitud infinita y ancho cero, lo cual es físicamente irrealizable. Una alternativa es aplicar un ruido al sistema y calcular la correlación cruzada entre la entrada y la salida. Consideremos una señal de ruido n(t) aplicada al sistema con respuesta impulsiva h(t), la salida
y(t)=n(t)*h(t)
A su vez Ryn=y(t)*n(-t)=[n(t)*h(t)]*n(-t)=Rnn(t)*h(t)
Si la entrada de ruido tiene un ancho de banda muy grande (ruido blanco para el sistema considerado), la autocorrelación Rnn es un pico mucho mas angosto que la respuesta impulsiva del sistema, de esta forma Ryn(t)=h(t)
Esto significa que si se aplica un ruido blanco al sistema desconocido, la respuesta impulsiva de este sistema se obtiene como la correlación cruzada de la entrada y la salida.


















