Ecuaciones Diferenciales - ma.uva.es · Ejemplo: Las ecuaciones (1), (3) y (4) son de primer orden,...
78
Ecuaciones Diferenciales 26 de noviembre de 2002 1
Transcript of Ecuaciones Diferenciales - ma.uva.es · Ejemplo: Las ecuaciones (1), (3) y (4) son de primer orden,...
Ecuaciones Diferenciales
26 de noviembre de 2002
1

¶Indice
1 Introducci¶on a las ecuaciones diferenciales. 4
1.1 Naturaleza de las ecuaciones diferenciales. . . . . . . . . . . . . . . . 4
1.2 Clasi¯caci¶on de las ecuaciones diferenciales ordinarias. . . . . . . . . . 6
1.3 Soluciones de las ecuaciones diferenciales ordinarias . . . . . . . . . . 7
1.4 Interpretaci¶on de una ecuaci¶on diferencial de primer orden. . . . . . . 10
2 M¶etodos de resoluci¶on para ecuaciones de primer orden 14
2.1 Separaci¶on de variables. . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Ecuaciones homog¶eneas. . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Ecuaciones diferenciales exactas. . . . . . . . . . . . . . . . . . . . . . 17
2.4 Ecuaciones lineales de primer orden. . . . . . . . . . . . . . . . . . . 21
2.5 Curvas ortogonales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Ecuaciones lineales de orden superior 31
3.1 Introducci¶on. Teorema de existencia y unicidad. . . . . . . . . . . . . 31
3.2 Resoluci¶on de la ecuaci¶on homog¶enea . . . . . . . . . . . . . . . . . . 33
3.3 La ecuaci¶on homog¶enea de orden n, de coe¯cientes constantes. . . . 37
3.4 La ecuaci¶on no homog¶enea . . . . . . . . . . . . . . . . . . . . . . . . 38
3.5 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 Transformada de Laplace 44
4.1 Introducci¶on. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2 Condiciones de existencia de transformadas. . . . . . . . . . . . . . . 46
4.3 Transformada de derivadas e integrales. . . . . . . . . . . . . . . . . . 47
4.4 Teoremas operacionales. . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.5 Aplicaci¶on a las ecuaciones diferenciales de coe¯cientes constantes. . . 50
4.6 M¶etodo de fracciones simples para el c¶alculo de la transformada in-
versa de Laplace. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.7 Aplicaci¶on a las ecuaciones diferenciales lineales con coe¯cientes que
son polinomios de grado 1. . . . . . . . . . . . . . . . . . . . . . . . . 52
4.8 Otras propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.9 Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.10 Ejercicios: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2

5 Sistemas de ecuaciones diferenciales. 60
5.1 Preliminares. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.2 Sistemas lineales de primer orden . . . . . . . . . . . . . . . . . . . . 62
5.3 Sistemas lineales homog¶eneos . . . . . . . . . . . . . . . . . . . . . . 63
5.4 Soluciones de un sistema no homog¶eneo. Variaci¶on de los par¶ametros. 65
5.5 Sistemas lineales homog¶eneos de coe¯cientes constantes . . . . . . . 68
5.6 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3

Cap¶³tulo 1
Introducci¶on a las ecuacionesdiferenciales.
1.1 Naturaleza de las ecuaciones diferenciales.
1.1.1 De¯nici¶on.- Una ecuaci¶on diferencial es una igualdad que involucra una
funci¶on y una o varias de sus derivadas. Si la funci¶on depende de una sola variable,
la ecuaci¶on diferencial se denomina ordinaria (EDO); si depende de varias variables,
la ecuaci¶on diferencial se denomina ecuaci¶on en derivadas parciales (EDP).
Ejemplos 1:
y0 ¡ 5y = 1 ¶ody
dx¡ 5y = 1 (1.1)
y00 ¡ 2y0 + 6y = 0 ¶od2y
dx2¡ 2dy
dx+ 6y = 0 (1.2)
y0 ¡ xy1=2 = 0 ¶ody
dx¡ xy1=2 = 0 (1.3)
(y0)2 + 1 = 0 ¶o
Ãdy
dx
!2+ 1 = 0 (1.4)
Son ecuaciones diferenciales ordinarias, en donde y es una funci¶on que depende
de x, y = f(x). Se suele representar a la funci¶on por y, mientras que x o t representan
generalemente las variables independientes.
Ejemplos 2:
x@u@x+ y @u
@y= u @2u
@x@y= x+ y
a2 @2u
@x@y= @2u
@t2¡ 2k @u
@t; (k constante) a2(@
2w@x2
+ @2w@y2
+ @2w@z2) = @w
@t
4

Estas ecuaciones son ecuaciones en derivadas parciales, donde u y w son funciones
de varias variables. Se suelen utilizar u, v, w para la funci¶on y x, y, z, t, para las
variables independientes ( las tres primeras, generalmente cuando el problema es un
problema espacial, indicando las coordenadas de cada punto, y la variable t cuando
la funci¶on depende del tiempo).
En los primeros temas nos vamos a centrar en el estudio de ecuaciones diferen-
ciales ordinarias.
>C¶omo surgen las ecuaciones diferenciales y d¶onde?
Aparecen en cualquier problema en el cual intervenga la variaci¶on de una magnitud
respecto a otras. En ese caso, la derivada representa la velocidad de dicha variaci¶on.
Ejemplos:
² El problema de determinar la trayectoria de un proyectil, cohete, sat¶elite o plane-ta.
² El problema de determinar la intensidad de corriente en un circuito el¶ectrico.² El problema de la conducci¶on del calor en una barra o l¶amina.² El problema de determinar las vibraciones de un cable o membrana.² El estudio de la velocidad de descomposici¶on de una substancia radiactiva o decrecimiento de una poblaci¶on.
² El estudio de la velocidad en una reacci¶on qu¶³mica.² El problema de la determinaci¶on de curvas que posean determinadas propiedadesgeom¶etricas ( por ejemplo, ortogonales, isoclinas, isobaras, l¶³neas de fuerza, etc).
Algunos ejemplos.
Cuerpo en ca¶³da libre.
Un cuerpo en el aire es atra¶³do verticalmente por la super¯cie terrestre con una
fuerza proporcional a su masa con constante de proporcionalidad g. Al liberarlo se
produce un movimiento cuya ecuaci¶on encontraremos.
Denotando por m a la masa del cuerpo, por v a su velocidad, por a a su aceleraci¶on
y por s al espacio recorrido, se tiene por la segunda ley de Newton que
Fuerza = ma = mdv
dt= m
d2s
dt2= mg ;
de donde se obtiene la ecuaci¶on diferencial s00(t) = g, que se puede plantear tambi¶encomo v0(t) = g y que tiene por soluci¶on general v(t) = gt+C. Finalmente, empleando
5

que v(t) = s0(t), podremos hallar la ecuaci¶on que rige el movimiento del cuerpo:s(t) = g
2t2 + Ct+D.
Obs¶ervese el signi¯cado de la constante C como velocidad inicial en el instante t = 0
y D como el espacio recorrido hasta el instante inicial. As¶³mismo, de la ecuaci¶on
para s(t) se observa que el espacio recorrido no depende de la masa m del cuerpo,
por lo que cuerpos con masas distintas caer¶an desde el mismo punto en el mismo
tiempo.
Una observaci¶on importante respecto al planteamiento del problema es que hubiera
resultado \ dif¶³cil" haber deducido por medio de experimentos f¶³sicos la ecuaci¶on
para s(t) pues var¶³a de forma m¶as o menos \ complicada" con el tiempo t (es un
polinomio de segundo grado), sin embargo la ecuaci¶on a(t) = g ser¶³a mucho m¶as
f¶acil de observar en los experimentos, pues nos dice que la variaci¶on de velocidad en
el tiempo es siempre la misma (constante), es decir, en cada segundo se aumenta la
velocidad siempre en la misma cantidad.
Ca¶³da retardada.
Sin necesidad de pensar demasiado observamos que el modelo anteriormente descrito,
aunque es una aproximaci¶on a la realidad, en muchos casos no re°eja bien lo que
realmente ocurre. Por ejemplo, no cae lo mismo un globo hinchado que una bola de
hierro. Y pensando en el ejemplo del globo vemos que cuanto m¶as fuerte lo lanzamos
m¶as resistencia parece oponer el aire, con lo cual podr¶³amos conjeturar que el aire
ejerce una resistencia (contraria) al movimiento que es proporcional a la velocidad.
Si as¶³ fuera, la ecuaci¶on diferencial que corresponde a tal idea es:
Fuerza = ma = mv0 = ms00 = mg ¡Kv:
M¶as adelante veremos c¶omo resolver este tipo de ecuaciones. De momento s¶olo
diremos que su soluci¶on es:
v(t) =m
K
³g ¡ Ce¡K
mt´;
s(t) =m
K
µgt+
m
KCe¡
Kmt¶+D;
N¶otese que ahora el espacio recorrido s¶³ depende de la masa. Seg¶un el planteamiento
anterior, suponiendo K un valor ¯jo, >qu¶e cuerpo cree que caer¶³a antes al soltarlos
desde igual altura, uno pesado o uno ligero?
1.2 Clasi¯caci¶on de las ecuaciones diferenciales ordinarias.
Las ecuaciones diferenciales ordinarias pueden clasi¯carse en cuanto a:
6

² ORDEN: es el de la derivada (ordinaria o parcial) m¶as alta que aparece en laecuaci¶on.
Ejemplo: Las ecuaciones (1), (3) y (4) son de primer orden, la ecuaci¶on (2) es de
orden 2.
² LINEALIDAD: las ecuaciones diferenciales ordinarias se clasi¯can tambi¶en enlineales y no lineales.
1.2.1 De¯nici¶on.- Se llama ecuaci¶on diferencial lineal de orden n aquella que
puede expresarse en la forma:
an(x)yn)(x) + an¡1(x)yn¡1)(x) + ¢ ¢ ¢+ a1(x)y0(x) + a0(x)y(x) = b(x)
donde an, an¡1, : : : , a1, a0 y b son funciones que dependen s¶olo de x y an es unafunci¶on no id¶enticamente nula.
Ejemplos:
Las ecuaciones (1), y (2) son lineales y las ecuaciones (3) y (4) no lo son.
La raz¶on de que se llamen lineales se ver¶a m¶as adelante.
1.3 Soluciones de las ecuaciones diferenciales ordinarias
Una ecuaci¶on diferencial ordinaria de orden n es una expresi¶on del tipo
F (x; y; y0; : : : ; yn)) = 0
donde F es una funci¶on real de n+2 variables. Nuestro objetivo es encontrar solu-
ciones para la ecuaci¶on.
1.3.1 De¯nici¶on.- Se dice que una funci¶on f(x), de¯nida en un intervalo I de
R, con derivada de orden n en I, es soluci¶on particular de la ecuaci¶on diferen-cial en I si sustitu¶³da en la ecuaci¶on reduce ¶esta a una identidad, es decir, si
F (x; f(x); f 0(x); : : : ; fn)(x)) = 0, 8x 2 I.
El intervalo I puede ser de cualquier tipo.
Las soluciones pueden venir expresadas de varias formas:
² Expl¶³citamente: la soluci¶on viene despejada como una funci¶on de x. (Por ejemplo,f(x) = 2x es soluci¶on de y0 ¡ 2 = 0)
7

² Impl¶³citamente: la soluci¶on viene de¯nida por una relaci¶on o igualdad. En estecaso, la expresi¶on puede de¯nir una o varias soluciones de la ecuaci¶on. Por ejem-
plo, x2 + y2 ¡ 25 = 0 de¯ne una soluci¶on impl¶³cita de x+ yy0 = 0 en (¡5; 5):Las funciones que se de¯nen impl¶³citamente en esa expresi¶on son:
f1(x) =p25¡ x2
f2(x) = ¡p25¡ x2
Ambas son soluciones en (¡5; 5) (Por qu¶e no en un intervalo mayor?)² De¯nidas a trozos: Por ejemplo, es f¶acil ver que cualquiera de las soluciones dela familia uniparam¶etrica y = Cx4 es soluci¶on de la ecuaci¶on xy 0 ¡ 4y = 0 y quela funci¶on de¯nida a trozos como
y =
( ¡x4 si x < 0
x4 si x ¸ 0
tambi¶en es soluci¶on de la ecuaci¶on. (Obs¶ervese que esta soluci¶on no es un miembro
de la familia uniparam¶etrica)
1.3.2 De¯nici¶on.- Se denomina curva integral de la ecuaci¶on diferencial a la gr¶a¯ca
de una soluci¶on de la misma ( es decir, al conjunto f(x; f(x)) : x 2 Ig).
En los ejemplos anteriores, la recta y = 2x es una curva integral, en el primero, y las
semicircunferencias f(x;p25¡ x2) : x 2 (¡5; 5)g y f(x;¡p25¡ x2) : x 2 (¡5; 5)gson curvas integrales para el segundo ejemplo.
1.3.3 De¯nici¶on.- Se llama soluci¶on general de la ecuaci¶on al conjunto de todas
las soluciones particulares de la ecuaci¶on.
Normalmente, dicha soluci¶on se puede representar por una expresi¶on que contiene
tantos par¶ametros o constantes como indica el orden de la ecuaci¶on diferencial.
Esto no ocurre siempre: pueden existir soluciones que no queden inclu¶³das en esa
expresi¶on param¶etrica. Dichas soluciones se llaman soluciones singulares.
Ejemplo:
La ecuaci¶on diferencial: y0 ¡ xy1=2 = 0 tiene esta familia param¶etrica de soluciones:
y =
Ãx2
4+ C
!2
La funci¶on y = 0 es tambi¶en una soluci¶on y no est¶a incluida en la expresi¶on anterior
(es decir, no se obtiene para ning¶un valor de C).
Resolver una ecuaci¶on diferencial signi¯ca hallar su soluci¶on general.
Ejemplos:
8

1. El ejemplo m¶as sencillo de ecuaci¶on diferencial es, si A es una constante, y0 = A.
La familia de primitivas de la funci¶on y0(x) es Ax + C, d¶onde C es una cons-tante arbitraria. Esta expresi¶on, Ax + C es la soluci¶on general de la ecuaci¶on
en R. Si damos un valor particular a C, por ejemplo C = 0, y(x) = Ax es unasoluci¶on particular de la ecuaci¶on. En este caso, todas las soluciones particulares
se obtienen dando valores a C.
2. Si h(x) es una funci¶on continua en R, la ecuaci¶on y0 = h(x) tiene por soluci¶on
general, en R:y(x) =
Z x
ah(t)dt+ C
donde C es una constante arbitraria y a un punto cualquiera de R.
En efecto, el teorema fundamental del c¶alculo garantiza que y(x) es derivable,
con derivada y0(x) = h(x).
Todas las soluciones particulares de la ecuaci¶on se obtienen dando valores a C.
1 Observaci¶on: No toda ecuaci¶on diferencial tiene soluci¶on (es decir, existe una
funci¶on real de variable real que veri¯que la ecuaci¶on).Por ejemplo: Ã
dy
dx
!2+ 1 = 0
Ãdy
dx
!2+ y2 + 4 = 0
no tienen soluciones que sean funciones reales.
Esto ¶ultimo plantea el problema siguiente: >cu¶ando una ecuaci¶on diferencial
tiene soluci¶on? Se dar¶a una soluci¶on parcial a este problema m¶as adelante.
El problema de Cauchy y los problemas de contorno.
En la pr¶actica, muchos problemas no requieren encontrar la soluci¶on general de la
ecuaci¶on, sino una o unas ciertas soluciones particulares. En esos casos el problema
se plantea como una ecuaci¶on diferencial acompa~nada de una o varias condiciones
que ha de cumplir la funci¶on soluci¶on.
Puesto que en una ecuaci¶on diferencial de orden n aparecen en la soluci¶on n cons-
tantes arbitrarias, el n¶umero de condiciones acompa~nantes no sobrepasar¶a a n.
Dichas condiciones suelen ser:
² El valor de la ecuaci¶on y de algunas de sus derivadas en un punto ¯jo x0, dandolugar a lo que llamamos Problema de Cauchy.
² El valor de la ecuaci¶on y de algunas de sus derivadas en dos o m¶as puntos, dandolugar a lo que llamamos Problema de contorno.
9

Por ejemplo:
y0 = 2xy(0) = 1
) y00 = 3x2 + 7y0(1) = 2y(1) = 3
9>>=>>;son problemas de Cauchy. Y
y00 = 3x2 + 7y(1) = 2
y(2) = 0
9>>=>>;es un problema de contorno.
1.4 Interpretaci¶on de una ecuaci¶on diferencial de primer or-
den.
Una ecuaci¶on diferencial de primer orden se escribe de la forma
F (x; y; y0) = 0; (1.5)
donde F es una funci¶on de tres variables. Normalmente se podr¶a despejar y0 de laecuaci¶on (1.5) en funci¶on de x y de y. De esta forma obtendremos otra escritura
para la ecuaci¶on diferencial (1.5), a saber
y0 = f(x; y): (1.6)
En este ¶ultimo caso diremos que la ecuaci¶on diferencial est¶a escrita en forma normal
o can¶onica. Frecuentemente la ecuaci¶on (1.6) se expresa como
dy
dx= f(x; y); (1.7)
y tambi¶en como
M(x; y)dx+N(x; y)dy = 0; (1.8)
donde se entiende que la ecuaci¶on diferencial escrita en forma can¶onica asociada a
(1.8) es :
dy
dx=¡M(x; y)N(x; y)
o biendx
dy=¡N(x; y)M(x; y)
; (1.9)
lo cual corresponde a de¯nir f(x; y) = ¡M(x; y)=N(x; y) en (1.6), o bien f(x; y) =¡N(x; y)=M(x; y) respectivamente.Obs¶ervese que el nombre que se da a las variables viene dado muchas veces por la
fuerza de la costumbre, y tanto la x como la y pueden ser la \variable independiente".
10

Por otra parte, una justi¯caci¶on rigurosa de esta interpretaci¶on pasa por la idea de
que si f(x; y) 6= 0, el teorema de la funci¶on impl¶³cita nos garantiza (bajo ciertas
hip¶otesis que no precisamos), que localmente se puede despejar la x como funci¶on
de la y y que la derivada de x(y) respecto de y es
dx
dy=
1dy
dx
=1
f(x; y)
Interpretaci¶on geom¶etrica
A la vista de la ecuaci¶on (1.6) podemos esbozar una interpretaci¶on gr¶a¯ca, pensando
que para cada punto (x; y) de R2, inclu¶³do en el dominio de de¯nici¶on de f , aunqueno conozcamos la funci¶on soluci¶on y(x) en un entorno de x que pasa por ese punto
(x; y), s¶³ sabemos el valor de la pendiente, y 0(x), pues y 0(x) = f(x; y) y f es unafunci¶on conocida.
Por tanto, si ponemos en cada punto (x; y) del dominio de f un vector de compo-
nentes (1; f(x; y)), obtendremos un campo vectorial que re°ejar¶a en dichos puntos
direcciones tangentes a soluciones que pasan por ellos. Nuestro subconsciente pro-
bablemente \ver¶a" trayectorias a seguir obligadas por las °echas (vectores), y no
vectores aislados (la ¯gura responde a esta idea para la ecuaci¶on y0 = y, cuyas
soluciones son y = Cex).
Y, rec¶³procamente, si a cada punto (x; y) le asignamos un vector de direcci¶on
(1; f(x; y)), entonces el campo vectorial est¶a asociado a la ecuaci¶on diferencial dydx =
f(x; y).
En este contexto, >c¶omo se interpreta un problema de Cauchy?. En el caso de
las ecuaciones diferenciales de primer orden, el problema de Cauchy toma la forma:(y 0 = f(x; y)y(x0) = y0
11
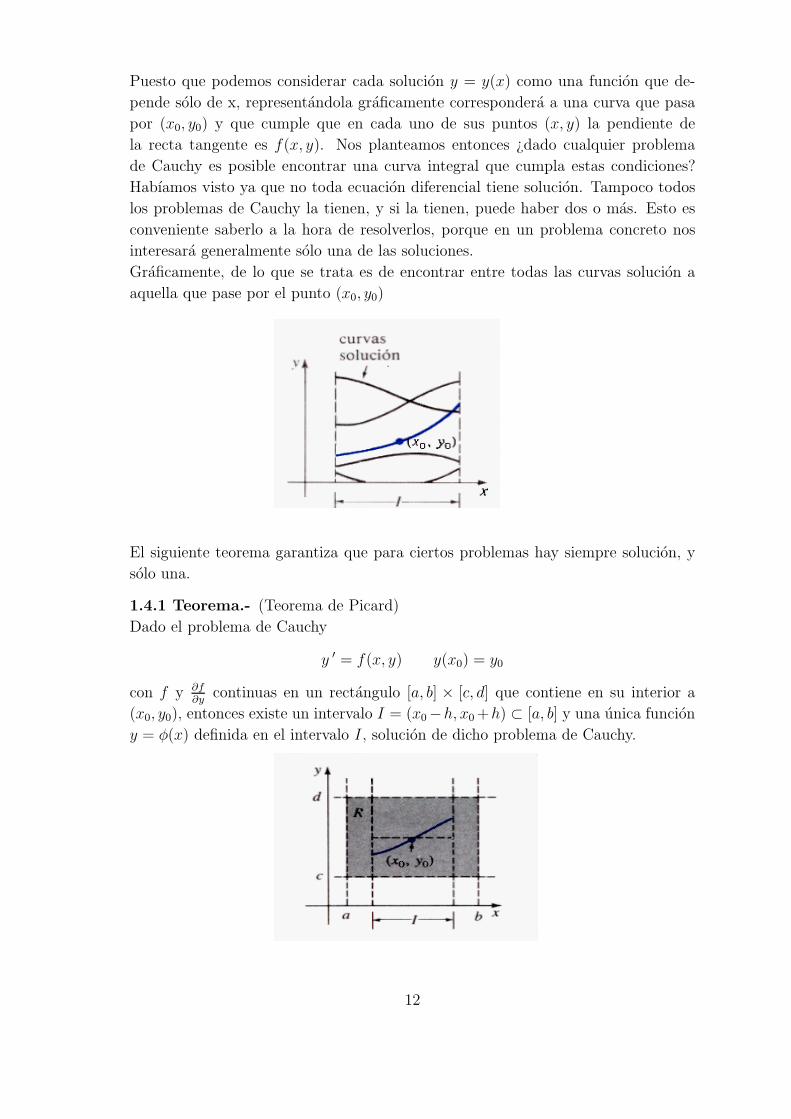
Puesto que podemos considerar cada soluci¶on y = y(x) como una funci¶on que de-
pende s¶olo de x, represent¶andola gr¶a¯camente corresponder¶a a una curva que pasa
por (x0; y0) y que cumple que en cada uno de sus puntos (x; y) la pendiente de
la recta tangente es f(x; y). Nos planteamos entonces >dado cualquier problema
de Cauchy es posible encontrar una curva integral que cumpla estas condiciones?
Hab¶³amos visto ya que no toda ecuaci¶on diferencial tiene soluci¶on. Tampoco todos
los problemas de Cauchy la tienen, y si la tienen, puede haber dos o m¶as. Esto es
conveniente saberlo a la hora de resolverlos, porque en un problema concreto nos
interesar¶a generalmente s¶olo una de las soluciones.
Gr¶a¯camente, de lo que se trata es de encontrar entre todas las curvas soluci¶on a
aquella que pase por el punto (x0; y0)
El siguiente teorema garantiza que para ciertos problemas hay siempre soluci¶on, y
s¶olo una.
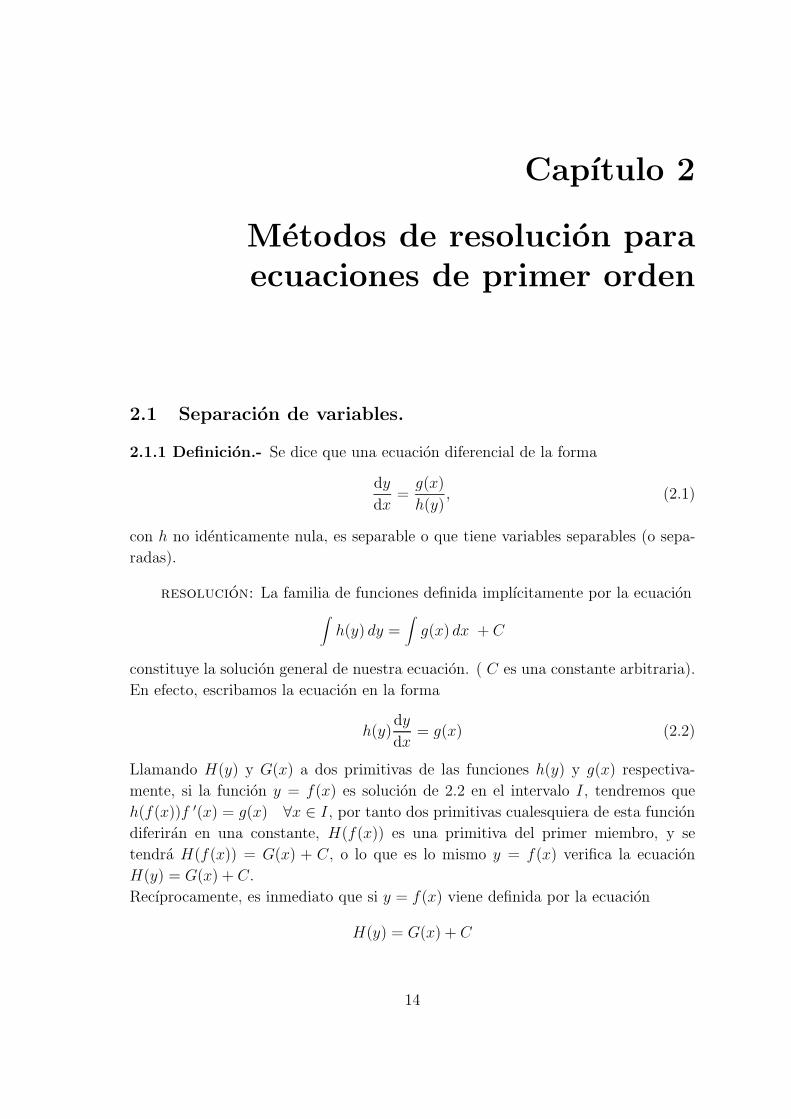
1.4.1 Teorema.- (Teorema de Picard)
Dado el problema de Cauchy
y 0 = f(x; y) y(x0) = y0
con f y @f@ycontinuas en un rect¶angulo [a; b] £ [c; d] que contiene en su interior a
(x0; y0), entonces existe un intervalo I = (x0¡h; x0+h) ½ [a; b] y una ¶unica funci¶ony = Á(x) de¯nida en el intervalo I, soluci¶on de dicho problema de Cauchy.
12

2 Observaci¶on: Se trata solamente de una soluci¶on \local", es decir, est¶a de¯nida
en un entorno de x0, que no tiene por qu¶e ser todo el intervalo [a; b]. (En ocasiones,
como es el caso de las ecuaciones lineales s¶³ que podremos asegurarlo).
Adem¶as, las hip¶otesis requeridas son condiciones su¯cientes (no necesarias).
13
Cap¶³tulo 2
M¶etodos de resoluci¶on paraecuaciones de primer orden
2.1 Separaci¶on de variables.
2.1.1 De¯nici¶on.- Se dice que una ecuaci¶on diferencial de la forma
dy
dx=g(x)
h(y); (2.1)
con h no id¶enticamente nula, es separable o que tiene variables separables (o sepa-
radas).
resoluci¶on: La familia de funciones de¯nida impl¶³citamente por la ecuaci¶onZh(y) dy =
Zg(x) dx + C
constituye la soluci¶on general de nuestra ecuaci¶on. ( C es una constante arbitraria).
En efecto, escribamos la ecuaci¶on en la forma
h(y)dy
dx= g(x) (2.2)
Llamando H(y) y G(x) a dos primitivas de las funciones h(y) y g(x) respectiva-
mente, si la funci¶on y = f(x) es soluci¶on de 2.2 en el intervalo I, tendremos que
h(f(x))f 0(x) = g(x) 8x 2 I, por tanto dos primitivas cualesquiera de esta funci¶ondiferir¶an en una constante, H(f(x)) es una primitiva del primer miembro, y se
tendr¶a H(f(x)) = G(x) + C, o lo que es lo mismo y = f(x) veri¯ca la ecuaci¶on
H(y) = G(x) + C.
Rec¶³procamente, es inmediato que si y = f(x) viene de¯nida por la ecuaci¶on
H(y) = G(x) + C
14

entonces es soluci¶on de la ecuaci¶on diferencial.
Ejercicio: Pruebe que la soluci¶on de y 0 = y es y(x) = Cex.
3 Observaci¶on: Al igual que ocurre con el c¶alculo de primitivas, no es necesario
escribir Zh(y)dy + C1 =
Zg(x)dx+ C2
puesto que C1 y C2 son constantes arbitrarias y esto podemos escribirlo comoZh(y)dy =
Zg(x)dx+ (C2 ¡ C1)
Una constante puede presentarse de diferentes formas: C, C2, eC , 1=C, log(C) ...
En el proceso de separaci¶on de variables pueden perderse soluciones, o introducirse
soluciones \¯cticias"
2.2 Ecuaciones homog¶eneas.
2.2.1 De¯nici¶on.- Una funci¶on f : A µ R2 7¡! R se dice que es homog¶enea degrado n si para cada x; y; t 2 R, tales que (x; y) 2 A y (tx; ty) 2 A, se tiene quef(tx; ty) = tnf(x; y).
Ejemplos: f1(x; y) = x + y y f2(x; y) =pxy + y son homog¶eneas de grado uno.
f3(x; y) =x
yy f4(x; y) = ln
x
yson homog¶eneas de grado cero. f5(x; y) =
p2x+
p3y
es homog¶enea de grado1
2.
2.2.2 De¯nici¶on.- A una ecuaci¶on diferencial de la forma
M(x; y) dx+N(x; y) dy = 0 (2.3)
tal que M(x; y) y N(x; y) son funciones homog¶eneas del mismo grado, se le llama
ecuaci¶on diferencial homog¶enea.
resoluci¶on: Por transformaci¶on mediante un cambio de variable a una de
variables separadas. Teniendo en cuenta que si h(x; y) es homog¶enea de grado n se
veri¯ca que
h(x; y) = xnhµ1;y
x
¶= ynh
Ãx
y; 1
!:
Podemos, entonces, escribir la ecuaci¶on diferencial (2.3) como
y 0 =¡M
µ1;y
x
¶Nµ1;y
x
¶ : (2.4)
15
Ahora, haciendo z = z(x) =y
xse tiene que y = zx, y por tanto y 0 = xz 0 + z. Con
lo que la ecuaci¶on diferencial (2.4) se transforma en
z 0 =¡M(1; z)N(1; z)
¡ zx
; (2.5)
que ya es de variables separadas. La soluci¶on ¯nal se obtiene integrando y luego
sustituyendo z pory
x(deshaciendo el cambio de variable).
4 Observaci¶on: El proceso de conversi¶on de la ecuaci¶on diferencial homog¶enea en
una de variables separables descrito anteriormente es equivalente, desde un punto
de vista operativo, a realizar la sustituci¶on
dy = zdx+ xdz;
que se deduce de la igualdad y = zx. Entonces, la transformaci¶on de la ecuaci¶on (2.3)
en una ecuaci¶on en las variables z y x, mediante un c¶alculo operacional elemental,
conduce a la ecuaci¶on de variables separadas (2.5).
Nota: La ecuaci¶on (2.3) tambi¶en puede resolverse con el cambio de variable
z = z(y) =x
y.
Las dos opciones para resolver (2.3) sugieren el planteamiento de la pregunta:
>qu¶e cambio de variable, z(x) = y=x o z(y) = x=y, ser¶a el que ocasione operaciones
m¶as sencillas para encontrar la soluci¶on?. Aunque la respuesta a esta pregunta
depende de la ecuaci¶on particular a resolver, generalmente si N(x; y) tiene una
expresi¶on sencilla ser¶a adecuado el cambio z(x) = y=x, y si es M(x; y) el que tiene
una expresi¶on simple es probable que el cambio z(y) = x=y sea el m¶as indicado. La
raz¶on de esta idea proviene de la igualdad d(uv) = u dv+ v du, con lo que m¶as vale
complicar un \ poco" lo que es sencillo, que complicar m¶as lo que ya es complicado.
Ejemplo: (x2 ¡ 2y2) dx+ xy dy = 0 (homog¶enea de grado 2).N(x; y) = xy es m¶as sencillo que M(x; y) = x2 ¡ y2, por lo que con el cambioz(x) = y=x se tendr¶a:
y 0 =2µy
x
¶2¡ 1
y
x
) z 0 =z2 ¡ 1zx
:
Obteniendo, al integrar esta ¶ultima ecuaci¶on diferencial de variables separadas y
luego deshaciendo el cambio de variable,
z2 ¡ 1 = Cx2 ) y2 = Cx4 + x2:
16

Ejercicio: Resuelva la ecuaci¶on del ejemplo anterior empleando el cambio de variable
z(y) = x=y.
2.3 Ecuaciones diferenciales exactas.
2.3.1 De¯nici¶on.- SeanM(x; y) yN(x; y) funciones continuas en un abierto conexo
V µ R2. Una ecuaci¶on diferencial del tipo
M(x; y) dx+N(x; y) dy = 0; (2.6)
se dice que es exacta en V , si el campo vectorial (M(x; y); N(x; y)) admite en V una
funci¶on de potencial.
resoluci¶on:
Si la funci¶on de potencial es F , las soluciones de la ecuaci¶on diferencial exacta (2.6)
son de la familia de curvas de¯nidas impl¶³citamente por la ecuaci¶on F (x; y) = C,
donde C es una constante arbitraria.
En efecto, supongamos que la funci¶on y = f(x); x 2 I es una curva de dicha familia,para un cierto valor de la constante C. Esto signi¯ca que F (x; f(x))¡C = 0 8x 2 I.Derivando con respecto de x, por la regla de la cadena, la funci¶on h(x) = F (x; f(x))¡C, obtenemos
D1F (x; f(x)) +D2F (x; f(x))f0(x) = 0 8x 2 I
y como D1F = M ; D2F = N , tenemos que f(x) es soluci¶on de la ecuaci¶on
diferencial 2.6. De manera rec¶³proca, si y = f(x) es soluci¶on de 2.6, deducimos que
se veri¯ca
D1F (x; f(x)) +D2F (x; f(x))f0(x) = 0 8x 2 I
Como I es un intervalo, una primitiva del primer miembro ser¶a constante en el
intervalo I; es decir, F (x; f(x)) = D 8x 2 I, y la funci¶on y = f(x) viene de¯nidaimpl¶³citamente por una una curva de la familia F (x; y) = C.
Ejercicio: Aplique este resultado a la ecuaci¶on diferencial y dx+ x dy = 0, para la
que F (x; y) = xy.
Dado que para la ecuaci¶on diferencial (2.6), la funci¶on F (x; y) no resultar¶a inmediata
de las expresiones deM(x; y) y de N(x; y), se plantean dos preguntas: >Cu¶ando una
ecuaci¶on diferencial es exacta?, y en caso de que la ecuaci¶on diferencial sea exacta,
>c¶omo obtener F (x; y)?.
Como normalmente trabajaremos con ecuaciones del tipo (2.6) tales queM y N son
17

de clase 1 en el abierto V , recordemos que es condici¶on necesaria para que exista la
funci¶on potencial que
@M
@y(x; y) =
@N
@x(x; y) 8x 2 V
Esta condici¶on tambi¶en es su¯ciente cuando trabajamos en conjuntos V simplemente
conexos, como es el caso muy frecuente de R2.
resoluci¶on: Recordemos dos caminos alternativos para encontrar la funci¶on de
potencial, en caso de que exista.
1. Se puede obtener considerando la integral de l¶³nea desde cierto punto ¯jo a lo largo
de cualquier camino contenido en el conjunto. En muchos casos, si es posible, se
tomar¶a como origen el origen de coordenadas y como camino, segmentos paralelos
a los ejes coordenados.
2. Si existe una funci¶on F (x; y) tal que@F
@x= M(x; y), mediante la integraci¶on
respecto de x, considerando y constante, obtenemos:
F (x; y) =ZM(x; y) dx + f(y); (2.7)
donde en f(y) ya englobamos la constante que produce el c¶alculo de la primitiva
de M(x; y) respecto de x. Para determinar f(y) empleamos que@F
@y= N(x; y),
con lo que al calcular la parcial respecto de y en (2.7) se llega a que
N(x; y) =@
@y
µZM(x; y) dx
¶+ f 0(y): (2.8)
Finalmente, al despejar f 0(y) de (2.8), nos debe quedar una funci¶on que ¶unicamentedepende de la variable y, por lo que f(y) se calcula integrando dicha funci¶on res-
pecto de y (de hecho ser¶a una nueva ecuaci¶on diferencial auxiliar de variables
separadas). Una vez hallada la expresi¶on de f(y), se lleva a (2.7) y se obtiene la
expresi¶on de F (x; y).
Nota: Al igual que con las ecuaciones diferenciales homog¶eneas, hay un camino
paralelo de soluci¶on que consiste en integrar primero respecto de y y derivar des-
pu¶es respecto de x. L¶ogicamente debe elegirse un camino u otro en funci¶on de la
simplicidad de los c¶alculos que haya que realizar, principalmente al hallar primi-
tivas.
5 Observaci¶on: Como ya se ha indicado, la soluci¶on de la ecuaci¶on exacta se ex-
presa como F (x; y) = C, para C constante arbitraria, y no simplemente como
18

F (x; y), pues F (x; y) es la expresi¶on de una funci¶on de dos variables (que no puede
ser soluci¶on de ninguna ecuaci¶on diferencial). En cambio, F (x; y) = C, expresa
en forma impl¶³cita que y es funci¶on de x, o que x es funci¶on de y, lo cual de¯ne
una funci¶on (o varias) de una ¶unica variable que es perfectamente coherente con el
concepto de soluci¶on de una ecuaci¶on diferencial.
Ejercicio: Compruebe que son exactas y resuelva las ecuaciones diferenciales siguien-
tes:a) (y ¡ x2) dx+ (x+ y3) dy = 0:b) (x3 + xy2) dx+ (x2y + y3) dy = 0:
Factores integrantes.
En ocasiones una ecuaci¶on diferencial del tipo M(x; y) dx + N(x; y) dy = 0 no
exacta puede convertirse en exacta multiplic¶andola por una funci¶on adecuada. Por
ejemplo, y dx¡ x dy = 0 no es exacta, pero tras multiplicarla por y¡2, s¶³ lo ser¶a.2.3.2 De¯nici¶on.- Una funci¶on ¹(x; y) de¯nida en un abierto V µ R2 continua yno id¶enticamente nula se dice que es un factor integrante de la ecuaci¶on diferencial
M(x; y) dx+N(x; y) dy = 0, si la ecuaci¶on diferencial
¹(x; y)M(x; y) dx+ ¹(x; y)N(x; y) dy = 0
es exacta.
2.3.3 Teorema.- Sean M(x; y) y N(x; y) dos funciones con parciales continuas
en un abierto simplemente conexo V contenido en R2. Una funci¶on ¹(x; y), noid¶enticamente nula y con parciales continuas en V , es un factor integrante de la
ecuaci¶on diferencial M(x; y) dx+N(x; y) dy = 0 si, y s¶olo si,
¹(x; y)
Ã@M
@y¡ @N@x
!= N
@¹
@x¡M@¹
@y; (2.9)
para todo (x; y) 2 V .Ejercicio: Demuestre el teorema anterior directamente a partir de la de¯nici¶on 2.3.2
y de la condici¶on necesaria para la existencia de funci¶on potencial.
6 Observaci¶on: La ecuaci¶on (2.9) constituye un problema de ecuaciones en derivadas
parciales, en general mucho m¶as dif¶³cil de resolver que la propia ecuaci¶on diferencial
original. Sin embargo en algunos casos ser¶a ¶util, por ejemplo, en situaciones del tipo
que se detallar¶a a continuaci¶on.
Nota: Para simpli¯car la notaci¶on emplearemos x e y como sub¶³ndices, para
indicar las respectivas parciales de una funci¶on respecto de x e y.
19

Factores integrantes que dependen s¶olo de x.
Si existe un factor integrante ¹(x; y) que depende s¶olo de x, es decir, ¹(x; y) = ¹(x),
entonces ¹y =@¹
@y= 0 y ¹x =
@¹
@x= ¹0, por lo que (2.9) se puede escribir como
(ln¹)0 =My ¡NxN
: (2.10)
Como el miembro de la izquierda en (2.10) es s¶olo funci¶on de x por hip¶otesis, en-
tonces, el miembro de la derecha en (2.10) tambi¶en ser¶a funci¶on ¶unicamente de x,
as¶³ que, con la notaci¶on
f(x) =My ¡NxN
; (2.11)
se tendr¶a que
¹(x) = eRf(x)dx: (2.12)
Por otra parte se puede probar que si My¡NxN
es una funci¶on s¶olo de x, f(x), entonces
¹(x) = eRf(x)dx es un factor integrante.
Ejemplo: Para la ecuaci¶on y dx¡ x dy = 0, se tiene queMy ¡NxN
=¡2x;
que es s¶olo funci¶on de x. Por ello
¹(x; y) = ¹(x) = e
R ¡2x
dx=1
x2
es un factor integrante para la ecuaci¶on dada. La constante arbitraria C la hemos
tomado C = 0. En general las constantes las tomaremos de forma que el factor inte-
grante resulte lo m¶as simpli¯cado posible (es obvio que nos basta con encontrar uno).
7 Observaci¶on: Una vez que a una ecuaci¶on diferencial la multiplicamos por un
factor integrante, tenemos ya una ecuaci¶on diferencial exacta.
Se espera que las soluciones de esta nueva ecuaci¶on sean tambi¶en soluciones de la
ecuaci¶on de partida. Un caso en el que esto est¶a garantizado es cuando ¹(x; y)6= 0para todo (x; y) 2 V , pues entonces de:
¹(x; y)[M(x; y)dx+N(x; y)dy] = 0
se deduce que M(x; y)dx+N(x; y)dy = 0.
Si ¹(x; y) se anula en algunos puntos de V , pueden estarse a~nadiendo soluciones a la
ecuaci¶on diferencial. Tambi¶en puede ocurrir que ciertas soluciones de la ecuaci¶on de
partida se \pierdan" al multiplicar por el factor integrante. Veremos unos ejemplos:
20

1. La ecuaci¶on y(2y2 ¡ 3x2)dx + 2x3dy = 0 no es exacta y admite como factor
integrante ¹(x; y) = 1y3. La familia de soluciones de la nueva ecuaci¶on es :
2x¡ x3
y2= C
que no incluye la soluci¶on y = 0 de la ecuaci¶on de partida.
2. La ecuaci¶on (x + y)dx + (x2
2y+ 2x)dy = 0 no es exacta y admite como factor
integrante ¹(x; y) = y. La familia de soluciones de la nueva ecuaci¶on es:
yx2
2+ y2x = C
Se observa que y = 0 est¶a inclu¶³da en esta familia de soluciones, pero sin embargo
no es soluci¶on de la ecuaci¶on de partida.
2.4 Ecuaciones lineales de primer orden.
2.4.1 De¯nici¶on.- Una ecuaci¶on diferencial de la forma
y 0 + P (x)y = Q(x) (2.13)
se le llama ecuaci¶on diferencial lineal de primer orden.
Nota: Habitualmente se exige que P (x) y Q(x) sean funciones continuas en un
intervalo I. De esta forma se tiene garant¶³a de existencia y unicidad globales de
las soluciones para toda condici¶on inicial y(x0) = y0, con x0 2 I (ver teorema deexistencia y unicidad).
Las ecuaciones diferenciales lineales aparecen frecuentemente en la pr¶actica. En
numerosas ocasiones modelos complicados se aproximan por modelos lineales, porque
su estudio es m¶as sencillo y porque se tiene la esperanza de que la soluci¶on a la
ecuaci¶on lineal aproxime a la soluci¶on del problema original. Por ejemplo, si en el
problema y 0 = f(x; y), con y(x0) = y0, la funci¶on f(x; y) resulta ser muy complicada,podemos aproximarla por su desarrollo de Taylor de primer orden en un entorno del
punto (x0; y0). Con ello obtendr¶³amos el problema8><>: y 0 = f(x0; y0) + (x¡ x0)@f@x(x0; y0) + (y ¡ y0)@f
@y(x0; y0)
y(x0) = y0
;
(2.14)
que es \ parecido" al inicial, pero mucho m¶as sencillo, al tener una ecuaci¶on dife-
rencial lineal de primer orden.
21

resoluci¶on: Se deja como ejercicio comprobar que las ecuaciones diferenciales
lineales poseen un factor integrante ¹ = ¹(x) que depende s¶olo de x.
La forma de conseguir la soluci¶on es, por tanto, multiplicar los dos miembros de la
expresi¶on (2.13) por el t¶ermino eRP (x) dx, que es un factor integrante. Con ello se
consigue la ecuaci¶on
d
dx
³yeRP (x) dx
´= e
RP (x) dxQ(x) ;
que es una ecuaci¶on diferencial cuya soluci¶on se obtiene f¶acilmente mediante una
primitiva. Finalmente se recupera y(x) despejando.
Observemos que, en este caso, el factor integrante es continuo y no nulo en el con-
junto donde lo sean P (x) y Q(x). Por tanto, todas las soluciones de la ecuaci¶on
exacta son soluciones de la ecuaci¶on de partida.
Nota: Obs¶ervese que en la ecuaci¶on diferencial (2.13) y 0 tiene por coe¯ciente un 1,por lo que para resolver una ecuaci¶on diferencial lineal del tipo R(x)y 0 + P (x)y =Q(x), antes de aplicar el m¶etodo de resoluci¶on es preciso dividir la ecuaci¶on dada
por R(x), con lo que habr¶a que ser cautos con los intervalos de de¯nici¶on de las
funciones resultantes.
Ecuaci¶on de Bernouilli.
Las ecuaciones de Bernouilli responden a la forma general:
y 0 + P (x)y = Q(x)yn (2.15)
para n6= 0 y n6= 1 (si n = 0 ¶o n = 1 la ecuaci¶on diferencial es directamente lineal).Si en (2.15) dividimos ambos miembros de la igualdad por yn, \ salta a la vista" el
cambio de variable
w(x) =1
(y(x))n¡1:
Con este cambio se tiene que w0 = (1¡ n)y¡ny 0 y sustituyendo en (2.15) se llega ala ecuaci¶on diferencial lineal
w0
1¡ n + P (x)w = Q(x):Finalmente se resuelve esta ¶ultima ecuaci¶on diferencial lineal y posteriormente se
deshace el cambio de variable.
8 Observaci¶on: Se~nalemos que en el m¶etodo de soluci¶on indicado para la ecuaci¶on
diferencial (2.15) en cierto momento se divide por yn por lo que, si n > 0, habr¶a que
a~nadir la soluci¶on y ´ 0 de la ecuaci¶on diferencial original, que hemos \perdido".Ejercicio: Pruebe que y ´ 0 y 1 = y2(Cx2 ¡ x4) proporcionan las soluciones de laecuaci¶on diferencial xy 0 + y = x4y3.
22

2.5 Curvas ortogonales.
Hasta ahora hemos visto que la soluci¶on de una ecuaci¶on diferencial de primer orden
se suele poder expresar como F (x; y; C) = 0, donde C es una constante arbitraria.
La ecuaci¶on F (x; y; C) = 0 proporciona para cada valor de C una curva o trayectoria
en el plano XY tal que en cada punto de la curva se satisface la relaci¶on dada por
la ecuaci¶on diferencial entre el valor de la abscisa x, la ordenada y y la pendiente
y 0(x) en dicha abscisa.
El problema tambi¶en puede plantearse de forma inversa: dada una familia
uniparam¶etrica de curvas F (x; y; C) = 0, encontrar una ecuaci¶on diferencial cuya
soluci¶on nos permita recuperar la familia original.
2.5.1 Ejemplo.- La expresi¶on x2 + y2 = C2 es la familia uniparam¶etrica de cir-
cunferencias centradas en (0; 0). Derivando la ecuaci¶on de la familia respecto a x se
tiene la ecuaci¶on diferencial de la familia: x+ yy 0 = 0.
En ocasiones la simple derivaci¶on respecto a x no es su¯ciente.
2.5.2 Ejemplo.- Para la familia de rectas y = Cx+4, se tiene que y 0 = C dependede C y la soluci¶on de y 0 = C incluye a m¶as rectas que las de la familia original. Sinembargo, utilizando que, de la ecuaci¶on inicial de la familia de rectas, C = (y¡4)=x,la ecuaci¶on diferencial es ahora y 0 = (y ¡ 4)=x.
El proceso seguido en el ejemplo anterior es general. Dada una familia de curvas
F (x; y; C) = 0, podemos obtener su ecuaci¶on diferencial siguiendo los pasos:
1.d
dxF (x; y; C) = 0.
2. Eliminando C entre las ecuaciones:8>><>>:d
dxF (x; y; C) = 0
F (x; y; C) = 0
Entonces, la ecuaci¶on diferencial obtenida se denomina ecuaci¶on diferencial de la
familia dada.
2.5.3 De¯nici¶on.- Dos curvas C1 y C2 se dice que son ortogonales si lo son las
rectas tangentes a cada una en cada punto donde se corten.
23

2.5.4 De¯nici¶on.- Dos familias de curvas F (x; y; C) = 0 y G(x; y; C) = 0, para C
constante arbitraria, se dice que son ortogonales si cada curva de la primera familia
es ortogonal a todas las de la segunda.
Por ejemplo, las familias de curvas y = mx y x2 + y2 = c son dos familias de
curvas ortogonales; la primera representa las rectas que pasan por el origen, y la
segunda es la familia de circunferencias centradas en el origen. (V¶ease el siguiente
dibujo).
El problema que trataremos ahora es:
Dada una familia de trayectorias F (x; y; C) = 0, encontrar una familia
G(x; y; C) = 0, tal que las familias F (x; y; C) = 0 y G(x; y; C) = 0 sean
ortogonales.
24

planteamiento geom¶etrico: Dado un punto (x; y) de la familia F (x; y; C) = 0,
su recta tangente tendr¶a por vector director (1; y 0). Por lo tanto, para encontrarla familia ortogonal G(x; y; C) = 0, debemos plantear que en ese punto (x; y) la
recta tangente tenga por vector director uno que sea ortogonal a (1; y 0), por ejemplo
el vector (1;¡1y 0). (N¶otese que (1; y 0) y (1;
¡1y 0) son ortogonales, pues su producto
escalar es cero.)
As¶³ pues, la soluci¶on al problema planteado se obtiene siguiendo los pasos:
1. Hallar la ecuaci¶on diferencial de la familia F (x; y; C) = 0.
2. Si la ecuaci¶on diferencial del apartado anterior es f(x; y; y 0) = 0, la ecuaci¶on
diferencial de la familia buscada ser¶a f(x; y;¡1y 0) = 0.
3. Resolver la ecuaci¶on diferencial f(x; y;¡1y 0) = 0.
Ejercicio: Halle la familia ortogonal a la familia de curvas dadas por la ecuaci¶on
y = ln(tanx+ C), con C constante arbitraria.
25

2.6 Ejercicios
1. Para ciertos valores de la constante n, la funci¶on enx es soluci¶on de la ecuaci¶on
diferencial y 000 ¡ 3y 00 ¡ 4y 0 + 12y = 0. Determinar los valores de n.2. Para ciertos valores de la constante n, la funci¶on xn es soluci¶on de la ecuaci¶on
diferencial x3y 000 + 2x2y 00 ¡ 10xy 0 ¡ 8y = 0. Determinar los valores de n.3. Demostrar que una ecuaci¶on diferencial de la forma y0 = f(ax + by + c), con
b6= 0 se puede reducir a una ecuaci¶on separable con el cambio u = ax + by + c.Aplicaci¶on: resolver
y0 =1¡ x¡ yx+ y
4. Demostrar que una ecuaci¶on diferencial de la forma
y 0 = f
Ãax+ by + c
Ax+By + C
!
con aB¡ bA6= 0 se puede reducir a una ecuaci¶on homog¶enea mediante el cambio(x = u+ h
y = v + k
donde h y k son constantes que se determinar¶an.
5. Resolver las siguientes ecuaciones diferenciales:
(1 + x)y dx = ¡(1¡ y)x dy dydx= x+ y
ydx¡ (x+ y)dy = 0 2x3 dydx= y(y2 + 3x2)
(2x3 + 4y)dx+ (4x+ y + 2)dy = 0 (x2 ¡ y) dx¡ x dy = 0dydx= y¡x
y+xdy + ytg(x)dx = 0
2x2ydy = (1 + x2)dx (x2 + y2)dx¡ 2xydy = 0dydx+ 2y = e¡x dy
dx¡ y = xy5
(1 + x2)xdy = (1 + y2)dx dydx+ xy = x3
dydx¡ 2y
1+x= (x+ 1)3 (a2 + y2)dx = 2x
pax2 ¡ a2dy
xdy ¡ ydx¡px2 ¡ y2dx = 0 y 0 + 4y = y2( senx+ cosx)(2x+ 3y)dx+ (y ¡ x)dy = 0 (x+ 1)dy
dx= x(1 + y2)
(x¡ y ¡ 3) dx¡ (x+ y ¡ 1) dy = 0 (x+ y ¡ 6) dx+ (y ¡ x) dy = 0xy 00 + 4y 0 = 0
6. Considerar la ecuaci¶on diferencial (4x+ 3y2)dx+ 2xydy = 0.
(a) Demostrar que no es exacta y encontrar un factor integrante de la forma xn
para la ecuaci¶on.
26

(b) Resolver la ecuaci¶on.
7. Dada la ecuaci¶on M(x; y)dx+N(x; y)dy = 0, demostrar que si
@N@x¡ @M
@y
M= g(y)
es una funci¶on que depende s¶olo de y, entonces ¹(y) = exp(Rg(y)dy)) es un factor
integrante.
8. Resolver la ecuaci¶on
(2xy2 + x2y ¡ y + 2x)dx+ (2x2y ¡ x3 ¡ x+ 2y)dy = 0
encontrando un factor integrante de la forma ¹(xy).
9. Resolver la ecuaci¶on
(4xy2 + 6y)dx + (5x2y + 8x)dy = 0
encontrando un factor integrante de la forma xqyp.
10. Resolver (3 y2 + 10xy)dx + (5xy + 12x2)dy = 0, sabiendo que tiene un factor
integrante de la forma xmyn.
11. Resolver la ecuaci¶on
(3x+ 2y + y2) dx+ (x+ 4xy + 5y2) dy = 0
buscando un factor integrante de la forma ¹ = '(x+ y2).
12. Determinar el valor de n para que xn + yn = C sean las trayectorias ortogonales
a la familia
y =x
1¡Dx13. Una familia de curvas es autoortogonal si su familia de trayectorias ortogonales
coincide con la propia familia. Demostrar que y2 = 2Cx+ C2 es autoortogonal.
14. Demostrar que la ecuaci¶on diferencial xy 0¡3y = 0 tiene una familia de solucionesde la forma y = Cx3 . Demostrar que la funci¶on
y =
(Ax3 si x · 0B x3 si x ¸ 0
es tambi¶en una soluci¶on. Existen entonces dos soluciones que pasan por el punto
(1; 1).
27

15. Considere el problema de valor inicial:
y 0 + P (x) y = xy(0) = 1
)donde P (x) =
(1 si 0 · x · 23 si x > 2
(a) Encontrar la soluci¶on general para 0 · x · 2.(b) Determinar la constante de la soluci¶on obtenida en a) para la cual se satisface
la condici¶on inicial.
(c) Encontrar la soluci¶on general para x > 2.
(d) Escoger la constante de la soluci¶on general obtenida en c) para que ambas
soluciones coincidan para x = 2. De esta manera se obtiene una soluci¶on
continua del problema de valor inicial.
16. Determinar una soluci¶on continua para el problema de valor inicial:
y 0 + 2 y = Q(x)y(0) = 0
)donde Q(x) =
(2 si 0 · x · 3¡2 si x > 3
17. Trace un esbozo de cada una de las siguientes familias de curvas, encuentre las
trayectorias ortogonales y a~n¶adalas al dibujo:
(a) xy = C.
(b) y = Cx2 .
(c) y = Cex .
(d) y2 = 4C(x+ C).
18. Encontrar las curvas que satisfagan cada una de las condiciones geom¶etricas
siguientes:
(a) La parte de la tangente cortada por los ejes est¶a bisecada por el punto de
tangencia.
(b) La proyecci¶on sobre el eje OX de una parte de la normal entre (x; y) y el eje
OX tiene longitud 1.
(c) La proyecci¶on sobre el eje OX de una parte de la tangente entre (x; y) y el eje
OX tiene longitud 1.
19. Las leyes de Kircho® establecen que la suma de las ca¶³das de voltaje a trav¶es de
cada uno de los elementos de un circuito es igual a la tensi¶on E(t) aplicada. Las
ca¶³das de voltaje a trav¶es de:
Inductor Ldi
dt= L
d2q
d2t
28

Condensador1
Cq
Resistencia iR =dq
dtR
donde L,C,y R son constantes, i(t) es la intensidad en cada instante y q(t) es la
carga.
(a) Un circuito en serie contiene una resistencia y un inductor. Determinar la
intensidad si R = 10, L = 3H y la tensi¶on aplicada es de 100V .
(b) Un circuito en serie contiene una resistencia y un condensador. Determinar la
carga si R = 6 y C = 5F siendo el voltaje suministrado de 110V .
20. (Ley de Torricelli)
Sup¶ongase que un tanque de agua tiene en el fondo un agujero de ¶area a por el
cual el agua est¶a saliendo. En condiciones ideales la velocidad con que el agua
sale a trav¶es del agujero es la que adquirir¶³a una gota de agua al caer libremente
desde la super¯cie del l¶³quido hasta el agujero. En condiciones reales, la velocidad
es proporcional a la anterior (con una constante comprendida entre 0 y 1 y que
generalmente es 0.6). Suponiendo condiciones ideales, si el tanque es hemisf¶erico,
tiene un radio m¶aximo de 4m. y est¶a lleno de agua en t=0, y en ese momento
se abre un agujero en el fondo de 1cm de di¶ametro, >cu¶anto tiempo tarda en
vaciarse?
21. La ley del enfriamiento de Newton sostiene que la variaci¶on de la temperatura de
un cuerpo es directamente proporcional a la diferencia de temperaturas del medio
ambiente (supuesta constante) y la del cuerpo. Justamente antes del mediod¶³a el
cuerpo de una v¶³ctima aparente de un homicidio se encuentra en un cuarto que
se conserva a temperatura constante de 70 F. A mediod¶³a, la temperatura del
cuerpo es de 80 F y a la 1 p.m. es de 75 F. Si la temperatura del cuerpo en el
momento de la muerte es de 98.6 F y si el cuerpo se ha enfriado de acuerdo con
la ley de Newton, >cu¶al fue la hora de la muerte?
22. La intensidad de la luz a una profundidad de x metros satisface la ecuaci¶on
diferencial I 0 = (¡1:4)I;(a) >A qu¶e profundidad la intensidad es la mitad que en la super¯cie (donde x=0)?
(b) >Cu¶al es la intensidad a una profundidad de 10 m.?
(c) > A qu¶e profundidad la intensidad ser¶a la cent¶esima parte de la de la super¯cie?.
23. Un gran dep¶osito contiene 1000 l de salmuera en la que est¶an disueltos 200Kg
de sal. A partir del instante t=0 se introduce agua pura a raz¶on de 3l/minuto
29
y la mezcla (que se mantiene homog¶enea) sale del dep¶osito a raz¶on de 2 l/min..
>Cu¶anto tiempo se necesitar¶a para reducir la cantidad de sal a la mitad?
24. Un dep¶osito est¶a lleno inicialmente con 100 m3 de agua salada, cuya concentraci¶on
es de 1.5 Kg. de sal por m3 . Una tuber¶³a empieza a verter en este dep¶osito agua
salada, de concentraci¶on 1 Kg de sal por m3 , a raz¶on de 2m3=min, a la vez que
por un ori¯cio del fondo sale la mezcla con la misma velocidad. Suponiendo que
la mezcla se mantiene homog¶enea en cada instante, calcular la concentraci¶on de
sal en el agua del dep¶osito al cabo de una hora.
25. La velocidad de disoluci¶on de un s¶olido es proporcional a la cantidad de s¶olido sin
disolver y a la diferencia entre las concentraciones de saturaci¶on de la sustancia
y a la que tiene en un instante t cualquiera. En un dep¶osito que contiene 60 Kg.
de disolvente se introducen 10 Kg. de soluto y al cabo de 12 minutos se observa
que la concentraci¶on es de 1 parte de soluto por 30 de disolvente. Determinar
la cantidad de soluto que existe en la soluci¶on en un instante cualquiera t, si la
concentraci¶on de saturaci¶on es de 1 parte de soluto en 3 de disolvente.
( Tomaremos como concentraci¶on la cantidad de kilogramos de soluto dividida
entre los kilogramos de disolvente).
26. Se ha descubierto que una bola de naftalina que ten¶³a originalmente un radio de
1/4 de pulgada, tiene un radio de 1/8 pulgada al cabo de un mes. Suponiendo
que se evapora a un ¶³ndice proporcional a su super¯cie, encuentre el radio en
funci¶on del tiempo. >Despu¶es de cu¶antos meses desaparecer¶a por completo?
27. Un medicamento se inyecta en el °ujo sangu¶³neo de un paciente con una intensidad
constante de r grs./seg. Simult¶aneamente la sustancia se elimina con una rapidez
proporcional a la cantidad de sustancia x(t) presente en cada instante. Halle, y
resuelva, la ecuaci¶on diferencial que rige la cantidad x(t).
30
Cap¶³tulo 3
Ecuaciones lineales de ordensuperior
3.1 Introducci¶on. Teorema de existencia y unicidad.
3.1.1 De¯nici¶on.- Se denomina ecuaci¶on diferencial lineal de segundo orden a la
que puede escribirse en la forma
y 00 + P (x)y 0 +Q(x)y = R(x) (3.1)
donde supondremos que P(x), Q(x) y R(x) son funciones continuas en un cierto
intervalo de los n¶umeros reales.
En general se denomina ecuaci¶on diferencial lineal de orden n a la que puede es-
cribirse en la forma
yn) + an¡1(x)yn¡1) + ¢ ¢ ¢+ a1(x)y0 + a0(x)y = R(x) (3.2)
donde, como antes, supondremos que an¡1(x); :::::; a1(x); a0(x) son funciones conti-nuas en un cierto intervalo de los n¶umeros reales.
Observaciones:
1. Si en la ecuaci¶on diferencial 3.2 el coe¯ciente de yn) no es uno, sino una funci¶on
continua en el mismo intervalo antes referenciado, supondremos siempre que tal
funci¶on es no nula en todos los puntos de dicho intervalo. Bajo estas hip¶otesis
siempre es posible poner la ecuaci¶on en la forma 3.2.
2. En este tema, la teor¶³a tiene una estructura ordenada y coherente, basada en
principios simples del Algebra Lineal. Sin embargo, la resoluci¶on pr¶actica de 3.1
31
puede ser m¶as complicada de lo que parece a simple vista, y casos particulares
de la misma constituyen temas completos de an¶alisis. Como ejemplos, se tienen:
(1¡ x2)y 00 ¡ 2xy 0 + p(p+ 1)y = 0 (ecuaci¶on de Legendre)
x2y 00 + xy 0 + (x2 ¡ p2)y = 0 (ecuaci¶on de Bessel)
Cuando en 3.2 se veri¯ca R(x) = 0 se tiene entonces la ecuaci¶on diferencial
yn) + an¡1(x)yn¡1) + :::::+ a1(x)y0 + a0(x)y = 0 (3.3)
que se denomina ecuaci¶on homog¶enea asociada a la ecuaci¶on 3.2.
3.1.2 Teorema.- ( Teorema de existencia y unicidad para la ecuaci¶on 3.2 ).
Sean an¡1(x); :::::; a0(x) y R(x) funciones continuas en el intervalo [a; b]. Si x0 2 [a; b]y si y0;m1;m2; :::::;mn¡1 son n¶umeros reales cualesquiera, entonces existe una ¶unicafunci¶on de clase n; y : [a; b]7¡! R tal que:
a) y(x) es soluci¶on de yn) + an¡1(x)yn¡1) + ¢ ¢ ¢+ a1(x)y0 + a0(x)y = R(x) en [a,b].b) y(x0) = y0, y
0(x0) = m1, y00(x0) = m2; : : : ; y
n¡1)(x0) = mn¡1.
Observaciones:
Bajo las hip¶otesis de este teorema:
1. Si x0 es un punto cualquiera del intervalo [a; b] y si la funci¶on y = y(x) es una
soluci¶on en [a; b] de la ecuaci¶on 3.3 que veri¯ca las condiciones iniciales y(x0) = 0,
y0(x0) = 0, y 00(x0) = 0; : : : ; yn¡1)(x0) = 0. entonces y ´ 0 en [a; b].2. Si x0 es un punto cualquiera del intervalo [a; b], y si las funciones y = y1(x),
y = y2(x) son soluciones en [a; b] de la ecuaci¶on 3.2 , y veri¯can las condiciones
iniciales y1(x0) = y2(x0) , y01(x0) = y02(x0), y1
00(x0) = y200(x0); : : : ; y
n¡1)1 (x0) =
yn¡1)2 (x0), entonces y1 ´ y2 en [a; b].
Estructura de la soluci¶on general.
3.1.3 Teorema.- Sean an¡1(x); an¡2(x); :::::; a0(x) y R(x) funciones continuas en elintervalo [a; b], Yg la soluci¶on general de
yn) + an¡1(x)yn¡1) + ¢ ¢ ¢+ a1(x)y0 + a0(x)y = R(x)o sea, el conjunto de todas las soluciones particulares de dicha ecuaci¶on, yp una
soluci¶on particular de esta ecuaci¶on, e Y0 la soluci¶on general de la ecuaci¶on ho-
mog¶enea asociada. Entonces se cumple Yg = yp + Y0.
Adem¶as, Y0 es un subespacio vectorial del espacio vectorial de todas las funciones
reales de¯nidas en el intervalo [a,b], o sea, si y1 e y2 son soluciones de la ecuaci¶on
homog¶enea asociada y si ®; ¯ son n¶umeros reales cualesquiera, entonces ®y1 + ¯y2es tambi¶en una soluci¶on de la ecuaci¶on homog¶enea.
32

3.2 Resoluci¶on de la ecuaci¶on homog¶enea
Independencia lineal
3.2.1 De¯nici¶on.- Se dice que las funciones f1(x); f2(x); :::::; fn(x) de¯nidas en el
intervalo [a,b], son linealmente independientes en dicho intervalo si la ¶unica soluci¶on
de la ecuaci¶on
c1f1(x) + c2f2(x) + ::::::+ cnfn(x) = 0 para todo x 2 [a; b]
es c1 = c2 = :::::: = cn = 0.
Un conjunto de funciones que no son linealmente independientes se denomina lineal-
mente dependiente.
Seg¶un la de¯nici¶on dada, es f¶acil ver que dos funciones son linealmente dependientes
si y s¶olo si una de las dos funciones es un m¶ultiplo escalar de la otra. Por ejemplo
f1 = senx y f2 = 5 senx son linealmente dependientes ya que c1 sinx+c2(5 sin x) =
0 admite la soluci¶on no nula c1 = ¡5 y c2 = 1.Es interesante observar que dos funciones pueden ser linealmente independientes
en un intervalo, y no serlo en otro. Por ejemplo f1(x) = x y f2(x) = jxj, sonlinealmente independientes en R y no lo son en fx=x > 0g.
3.2.2 De¯nici¶on.- Sean y1; y2; :::::; yn funciones que admiten derivadas hasta el or-
den n¡1 en el intervalo [a,b]. Se denomina wronskiano de y1; y2; :::::; yn a la funci¶onde¯nida en [a,b] por medio del determinante.
w(y1; y2; :::::; yn) = det
2666664y1 y2 : : : yny01 y02 : : : y0n...
.... . .
...
yn¡1)1 y
n¡1)2 : : : yn¡1)n
37777753.2.3 Teorema.- Sean y1; y2; :::::; yn soluciones de la ecuaci¶on diferencial y
n) +
an¡1(x)yn¡1) + ¢ ¢ ¢ + a1(x)y0 + a0(x)y = 0 , en el intervalo [a,b]. Entonces es ciertauna y s¶olo una de las proposiciones siguientes:
a) w(y1; :::::; yn)(x) = 0 para todo x 2 [a; b]:b) w(y1; :::::; yn)(x)6= 0 para todo x 2 [a; b]:
Demostraci¶on: Es obvio que s¶olo caben dos posibilidades, que las soluciones sean
linealmente dependientes (en el intervalo [a; b]) o que no lo sean.
33

1. Si las funciones y1; y2; :::::; yn son linealmente dependientes, vamos a ver que
w(y1; y2; :::::; yn) ´ 0 en [a,b].En efecto, supongamos que existe una combinaci¶on lineal
c1y1(x) + c2y2(x) + : : :+ cnyn(x) = 0 8x 2 [a; b]
con coe¯cientes ci no todos nulos. Derivando n ¡ 1 veces, y considerando es-tas expresiones en el punto x0, donde x0 es un punto cualquiera del intervalo,
obtendremos
8>>>><>>>>:c1y1(x0) + c2y2(x0) + : : :+ cnyn(x0) = 0
c1y01(x0) + c2y
02(x0) + : : :+ cny
0n(x0) = 0
: : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
c1yn¡1)1 (x0) + c2y
n¡1)2 (x0) + : : :+ cny
n¡1)n (x0) = 0
¶Este es un sistema lineal y homog¶eneo en las inc¶ognitas ci, que admite una
soluci¶on no trivial, c1; c2; : : : ; cn de donde se deduce que el determinante del
sistema, que no es otro que el wronskiano en el punto x0, es cero.
2. Si las soluciones y1; y2; :::::; yn son linealmente independientes, w(y1; y2; :::::; yn)6=0 en todos los puntos de [a,b].
En efecto, supongamos que para alg¶un x0 de [a; b] se tiene que w(y1; y2; :::::; yn)(x0) =
0. Entonces el sistema8>>>><>>>>:c1y1(x0) + c2y2(x0) + : : :+ cnyn(x0) = 0
c1y01(x0) + c2y
02(x0) + : : :+ cny
0n(x0) = 0
: : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
c1yn¡1)1 (x0) + c2y
n¡1)2 (x0) + : : :+ cny
n¡1)n (x0) = 0
admite soluci¶on no trivial. Sea ¶esta C1; C2; : : : ; Cn.
Si consideramos la funci¶on Y (x) = C1y1(x) + C2y2(x) + : : : + Cnyn(x), tenemos
una soluci¶on de la ecuaci¶on diferencial homog¶enea que veri¯ca las condiciones
iniciales:
Y (x0) = 0 Y 0(x0) = 0 : : : Y n¡1) = 0
y por la observaci¶on 1. de 3.1.2, se tendr¶a Y ´ 0, lo que contradice la hip¶otesisde independencia lineal.
3.2.4 Corolario.- Sean y1; y2; :::::; yn soluciones de la ecuaci¶on diferencial
yn) + an¡1(x)yn¡1) + ¢ ¢ ¢+ a1(x)y0 + a0(x)y = 0
en el intervalo [a,b].
Las soluciones y1; y2; :::::; yn son linealmente independientes si y solamente si su
wronskiano no se anula en alg¶un punto de [a; b]:
34

3.2.5 Teorema.- Para la ecuaci¶on diferencial
yn) + an¡1(x)yn¡1) + :::::+ a1(x)y0 + a0(x)y = 0
se cumple:
a) Admite n soluciones linealmente independientes.
b) dim Y0 = n (Y0 es el e.v. de las soluciones de la ecuaci¶on)
c) Si y1; y2; :::::; yn son soluciones linealmente independientes, entonces y(x) = c1y1(x)+
:::::+ cnyn(x) es la soluci¶on general de (3.4).
Demostraci¶on:
Tomemos un x0 2 [a; b] arbitrario.a) Basta aplicar la proposici¶on relativa a la existencia y unicidad (3.1.2) a los pro-
blemas de condiciones iniciales:
y(x0) = 1 y0(x0) = 0 y00(x0) = 0 : : : yn¡1) = 0
y(x0) = 0 y0(x0) = 1 y00(x0) = 0 : : : yn¡1) = 0
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢y(x0) = 0 y0(x0) = 0 y00(x0) = 0 : : : yn¡1) = 1
Se obtienen as¶³, n soluciones de la ecuaci¶on, y1; y2; : : : ; yn, cuyo wronskiano es dis-
tinto de cero en el punto x0 y por tanto, son linealmente independientes en el inter-
valo [a; b]. (Recu¶erdese (3.2.4).)
Para probar b), basta probar que cualquier soluci¶on de la ecuaci¶on, es combinaci¶on
lineal de las as¶³ constru¶³das. En efecto sea Y (x) una soluci¶on cualquiera, y conside-
remos los n¶umeros ci = Y i¡1)(x0), para i = 1; : : : ; n. Construyendo la funci¶on
y(x) = c1y1(x) + c2y2(x) + ¢ ¢ ¢+ cnyn(x), obtenemos quey(x0) = c1 = Y (x0)
y0(x0) = c2 = Y 0(x0)...
......
yn¡1(x0) = cn = Y n¡1(x0)
y por la observaci¶on 2. de 3.1.2 que Y (x) ´ y(x) 8x 2 [a; b]c) Se deduce de las propiedades de espacio vectorial. 2
Como consecuencia de los Teoremas anteriores se tiene el siguiente resultado:
3.2.6 Proposici¶on.- Si yp es una soluci¶on particular de la ecuaci¶on diferencial no
homog¶enea
yn) + an¡1(x)yn¡1) + :::::+ a1(x)y0 + a0(x)y = R(x)
e y1; y2; :::::; yn son soluciones linealmente independientes de la ecuaci¶on diferencial
homog¶enea asociada, entonces y(x) = yp(x) + c1y1(x) + :::::+ cnyn(x) es la soluci¶on
general de yn) + an¡1(x)yn¡1) + :::::+ a1(x)y0 + a0(x)y = R(x).
35

Insistiendo en la idea, para resolver una ecuaci¶on no homog¶enea de orden n, basta
encontrar n soluciones linealmente independientes de la ecuaci¶on homog¶enea asocia-
da, y una soluci¶on particular de la no homog¶enea.
La ecuaci¶on homog¶enea de segundo orden.
Utilizaci¶on de una soluci¶on conocida para encontrar la otra.
3.2.7 Teorema.- Si y1(x) es una soluci¶on de la ecuaci¶on diferencial homog¶enea
y 00 + P (x)y 0 +Q(x)y = 0 en el intervalo [a,b] y adem¶as se cumple que y1(x)6= 0 endicho intervalo, entonces existe una funci¶on v = v(x) tal que:
1. y2(x) = v(x)y1(x) es tambi¶en una soluci¶on de y00 + P (x)y 0 +Q(x)y = 0
2. y1(x) e y2(x) son linealmente independientes.
La ecuaci¶on homog¶enea de segundo orden con coe¯cientes constantes.
Si en la ecuaci¶on diferencial homog¶enea y 00+P (x)y 0+Q(x)y = 0, las funciones P (x)y Q(x) son respectivamente las constantes p y q, se tiene entonces la ecuaci¶on:
y 00 + py 0 + qy = 0 (3.4)
denominada ecuaci¶on diferencial homog¶enea con coe¯cientes constantes. La ecuaci¶on
algebraica m2 + pm + q = 0 [e.c.] se denomina ecuaci¶on caracter¶³stica aso-
ciada a la misma.
Adelantando una t¶ecnica que emplearemos m¶as adelante, observamos que la derivada
de la funci¶on y = emx es un m¶ultiplo de s¶³ misma y = memx, y por tanto esta
funci¶on ser¶a soluci¶on de la ecuaci¶on 3.4, si y solamente si m es ra¶³z de la ecuaci¶on
caracter¶³stica. Por tanto si disponemos de dos ra¶³ces diferentes, tendremos dos solu-
ciones de la ecuaci¶on que son linealmente independientes, como se puede comprobar
f¶acilmente. En el caso de que la ecuaci¶on caracter¶³stica tenga s¶olo una ra¶³z doble,
utilizaremos la ya disponible y = emx, para encontrar otra con el m¶etodo sugerido
con anterioridad. La nueva soluci¶on ser¶a xemx.
En el caso de que la ecuaci¶on caracter¶³stica posea ra¶³ces complejas, ser¶an conju-
gadas, a + bi y a¡ bi y como cualquier combinaci¶on lineal de soluciones ( a¶un concoe¯cientes complejos ) es soluci¶on, obtenemos las soluciones
e(a+bi)x + e(a¡bi)x
2= eax cos bx
e(a+bi)x ¡ e(a¡bi)x2i
= eax sen bx
Por tanto, podemos enunciar:
36

3.2.8 Teorema.- Dada la ecuaci¶on diferencial de coe¯cientes constantes, 3.4, en la
resoluci¶on de la ecuaci¶on caracter¶³stica pueden darse diferentes situaciones:
Caso I ( ra¶³ces reales diferentes ):
Si m1 6= m2 son ra¶³ces reales distintas de la ecuaci¶on caracter¶³stica [e.c.], entonces
la soluci¶on general de 3.4 es:
y(x) = c1em1x + c2e
m2x
donde c1; c2 son constantes arbitrarias.
Caso II ( ra¶³ces reales iguales ):
Si m1 = m2 son ra¶³ces reales iguales de la ecuaci¶on caracter¶³stica [e.c.], entonces la
soluci¶on general de 3.4 es:
y(x) = c1emx + c2xe
mx = emx(c1 + c2x)
donde m = m1 = m2 = ¡p2y c1; c2 son constantes arbitrarias.
Caso III ( Ra¶³ces complejas conjugadas ):
Si m1 = a + ib y m2 = a ¡ ib, con b 6= 0, son ra¶³ces complejas conjugadas de la
ecuaci¶on caracter¶³stica [e.c.], entonces la soluci¶on general de 3.4 es:
y(x) = c1eax cos bx+ c2e
ax sen bx
donde c1; c2 son constantes arbitrarias.
3.3 La ecuaci¶on homog¶enea de orden n, de coe¯cientes cons-
tantes.
Si en la ecuaci¶on diferencial homog¶enea 3.3 todas las funciones ai(x) son constantes,
se tiene la ecuaci¶on diferencial
y n) + an¡1y n¡1) + ::::::+ a1y 0 + a0y = 0 (3.5)
donde ahora las ai representan constantes y no funciones.
La ecuaci¶on algebraica
mn + an¡1mn¡1 + ::::::+ a1m+ a0 = 0 (3.6)
se denomina ecuaci¶on caracter¶³stica asociada a la misma.
En este caso la soluci¶on general se obtiene siguiendo un procedimiento similar al
usado en la ecuaci¶on diferencial de segundo orden, es decir, empezamos hallando
las n ra¶³ces de la ecuaci¶on caracter¶³stica y a continuaci¶on, bas¶andonos en dichas
37

ra¶³ces, formamos un conjunto linealmente independiente de n soluciones. La prin-
cipal diferencia es que, en el caso de ecuaciones de orden tres o superior, las ra¶³ces
de la ecuaci¶on caracter¶³stica pueden tener multiplicidad mayor que 2. Cuando esto
ocurre formamos soluciones adicionales ( linealmente independientes) multiplicando
por potencias crecientes de x.
3.3.1 Teorema.- Dada la ecuaci¶on diferencial de coe¯cientes constantes, 3.5, en la
resoluci¶on de la ecuaci¶on caracter¶³stica pueden darse diferentes situaciones:
Caso I ( Ra¶³ces reales diferentes ):
Si la ecuaci¶on caracter¶³stica 3.6 asociada a la ecuaci¶on diferencial lineal homog¶enea
con coe¯cientes constantes 3.5 tiene n ra¶³ces reales diferentes m1;m2; :::::;mn, en-
tonces la soluci¶on general de 3.5 es:
y = c1em1x + c2e
m2x + ::::::+ cnemnx
donde c1; c2; :::::; cn son constantes arbitrarias.
Caso II ( Ra¶³ces reales repetidas ):
Si la ecuaci¶on caracter¶³stica 3.6 asociada a la ecuaci¶on diferencial lineal homog¶enea
con coe¯cientes constantes 3.5 tiene la ra¶³z real m que se repite k veces, entonces la
parte de la soluci¶on general de 3.5 correspondiente a esta ra¶³z repetida es
(c1 + c2x+ :::::+ ckxk¡1)emx
donde c1; c2; :::::; cn son constantes arbitrarias.
Caso III ( Ra¶³ces complejas conjugadas )
Si la ecuaci¶on caracter¶³stica asociada a la ecuaci¶on diferencial lineal homog¶enea
con coe¯cientes constantes 3.5 tiene las ra¶³ces a+ ib y a¡ ib que se repiten k veces,entonces la parte de la soluci¶on general de 3.5 correspondiente a estas ra¶³ces repetidas
es
eax[(c1 + c2x+ :::::+ ckxk¡1) sen bx+ (ck+1 + ck+2x+ :::::+ c2kxk¡1) cos bx]
donde c1; c2; :::::; cn son constantes arbitrarias.
En los casos II) y III) sumando las partes correspondientes a todas las ra¶³ces se tiene
la soluci¶on general de 3.5.
3.4 La ecuaci¶on no homog¶enea
El m¶etodo de reducci¶on de orden
Para ecuaciones diferenciales de segundo orden (aunque se extiende a ecuaciones de
orden n ):
y 00 + P (x)y 0 +Q(x)y = R(x)
38

se parte de una soluci¶on particular y1(x) de la ecuaci¶on homog¶enea asociada, y con-
jeturamos que la soluci¶on general de dicha ecuaci¶on es de la forma y(x) = v(x)y1(x).
Derivando, substituyendo y simpli¯cando, obtenemos:
v00y1 + v0(2y01 + P (x)y1) = R(x)
ecuaci¶on lineal de primer orden en v0 que, resuelta y tras la correspondiente inte-graci¶on nos da v(x) ( que va a depender de 2 constantes arbitrarias), y por tanto la
soluci¶on general y(x).
El m¶etodo de variaci¶on de los par¶ametros.
Es un m¶etodo para encontrar una soluci¶on particular de 3.2 cuando se conoce la
soluci¶on general de la ecuaci¶on homog¶enea asociada 3.3. Si esta soluci¶on la expre-
samos en la forma.
Y0 = c1y1(x) + c2y2(x) + :::::+ cnyn(x)
el m¶etodo consiste en substituir las constantes c1; c2; :::::; cn por funciones conve-
nientes v1(x); v2(x); :::::; vn(x) para que la funci¶on yp = v1(x)y1(x) + v2(x)y2(x) +
::::: + vn(x)yn(x) sea una soluci¶on particular de 3.2. En cada sucesiva derivada
(hasta la n ¡ 1) de la funci¶on yp, la combinaci¶on lineal resultante de funcionesv01(x); v
02(x); :::::; v
0n(x) se iguala a cero, obteni¶endose un sistema de n ecuaciones en
donde las inc¶ognitas son las funciones v01(x); v02(x); :::::; v
0n(x), y cuya matriz (del
sistema) tiene por determinante al wronskiano w(y1; y2; :::::; yn)6= 0.
El m¶etodo de coe¯cientes indeterminados.
Como en el caso anterior es un m¶etodo para encontrar una soluci¶on particular de
3.2 cuando se conoce la soluci¶on general de la ecuaci¶on homog¶enea 3.3. Se aplica,
generalmente, cuando los coe¯cientes de 3.2 son constantes y el segundo miembro
R(x) est¶a formada por t¶erminos cuyas derivadas sucesivas llegan en alg¶un momento a
anularse o a repetirse salvo un factor constante; en concreto, funciones polin¶omicas,
exponenciales, senos, cosenos, o bien combinaciones aditivas o factoriales de las
mismas. En s¶³ntesis puede decirse que el m¶etodo consiste en conjeturar la forma
de la soluci¶on particular de modo que incluya un n¶umero su¯ciente de coe¯cientes
indeterminados que puedan ajustarse a las circunstancias en cada caso.
Por ejemplo, para la ecuaci¶on de segundo orden:
y 00 + py 0 + qy = R(x)
Caso 1. R(x) = b0 + b1x+ :::::+ bmxm
39

1. Si q6= 0 se conjetura que yp = a0 + a1x+ :::::+ amxm
2. Si q = 0 se hace y0 = u; y 00 = u 0 y se procede como en el caso anterior para laecuaci¶on reducida de primer orden resultante. O tambi¶en, equivalentemente, se
pone yp = x(a0 + a1x+ :::::+ amxm)
Caso 2. R(x) = Keax
1. Si a no es ra¶³z de la ecuaci¶on caracter¶³stica, se conjetura que yp = Aeax.
2. Si a es ra¶³z simple de la ecuaci¶on caracter¶³stica, se conjetura que yp = Axeax.
3. Si a es ra¶³z doble de la ecuaci¶on caracter¶³stica, se conjetura que yp = Ax2eax.
Caso 3. R(x) =M cos bx+N sen bx
Se conjetura que yp = A cos bx + B sen bx, siempre y cuando esta funci¶on no sea
soluci¶on de la ecuaci¶on homogenea asociada. En caso contrario, se pone yp =
x(A cos bx+B sen bx).
Casos mixtos aditivos.
Se procede teniendo en cuenta el siguiente resultado, de demostraci¶on inmediata:
Si y1(x) e y2(x) son soluciones respectivas de las ecuaciones
y 00 + P (x)y 0 +Q(x)y = R1(x)
y 00 + P (x)y 0 +Q(x)y = R2(x)
entonces y = y1(x) + y2(x) es una soluci¶on de
y 00 + P (x)y 0 +Q(x)y = R1(x) +R2(x)
Casos mixtos factoriales.
Si R(x) = eax(b0 + b1x + ::::: + bmxm)(M cos bx + N sen bx), se conjetura que yp =
eax(a0 + a1x + ::::: + amxm)(A cos bx + B sen bx), salvo cuando eax es ra¶³z de la
ecuaci¶on homog¶enea asociada, ya que entonces se procede como en los casos ante-
riores, a~nadiendo factores crecientes de x, hasta conseguir que no ocurra esto.
40

3.5 Ejercicios
1. Eliminando las constantes c1 y c2, encontrar la ecuaci¶on diferencial de cada una
de las familias de curvas siguientes:
(a) y = c1x+ c2x2
(b) y = c1ekx + c2e
¡kx
(c) y = c1 sen kx+ c2 cos kx
SOL.: a) x2y 00 ¡ 2xy0 + 2y = 0; b) y 00 ¡ k2y = 0; c) y 00 + k2y = 0:
2. Veri¯car que la funci¶on y = c1x¡1+c2x5 es una soluci¶on de x2y 00¡3xy 0¡5y = 0 en
cualquier intervalo [a; b] que no contenga al 0. Si x0 6= 0; y0 y m son arbitrarios,
demuestre que c1 y c2 pueden escogerse de una y s¶olo una manera para que
y(x0) = y0 e y0(x0) = m.
3. Demu¶estrese que las funciones y1 = x2 senx e y2 = 0 son soluciones de la
ecuaci¶on x2y 00 ¡ 4xy 0 + (x2 + 6)y = 0, y que ambas satisfacen las condiciones
y(0) = 0; y0(0) = 0. >Contradice esto el Teorema de existencia y unicidad de
ecuaciones diferenciales lineales de segundo orden?. Justif¶³quese la respuesta.
4. Considere las funciones y1 = x3 e y2 = x
2jxj en el intervalo [¡1;+1]. Demuestreque su wronskiano es identicamente nulo en dicho intervalo, pero que, sin em-
bargo, ambas funciones no son linealmente dependientes. >Qu¶e conclusi¶on puede
sacarse de lo anterior?.
5. Indicando el intervalo correspondiente, estudiar la dependencia lineal de los siguien-
tes conjuntos de funciones:
(a) f1; x; x2g(b) fex; xexg(c) f1; x; 2x¡ 3g6. Demuestre que y = c1e
2x+ c2xe2x es la soluci¶on general de la ecuaci¶on y 00¡4y 0+
4y = 0 en cualquier intervalo.
7. Demuestre que y = c1ex+c2e
2x es la soluci¶on general de la ecuaci¶on y 00¡3y 0+2y =0 en cualquier intervalo, y encontrar la soluci¶on particular que cumple y(0) = ¡1e y 0(0) = 1.
SOL.: y = ¡3ex + 2e2x:8. Obteniendo en primer lugar una soluci¶on particular por observaci¶on directa, re-
solver las siguientes ecuaciones:
41

(a) xy 00 + 3y 0 = 0
(b) x2y 00 + xy 0 ¡ 4y = 0(c) xy 00 ¡ (2x+ 1)y 0 + (x+ 1)y = 09. Resolver las siguientes ecuaciones:
(a) y4) ¡ y = 0(b) y4) ¡ y 00 = 0(c) y3) ¡ 3y 00 + 7y 0 ¡ 5y = 0(d) y5) ¡ 2y4) + 5y3) ¡ 8y 00 + 4y 0 = 0
SOL.:
a) y = c1ex + c2e
¡x + c3 cosx+ c4 senx: b) y = c1 + c2x+ c3ex + c4e
¡x: c) y =
c1ex + c2e
x cos 2x+ c3ex sen 2x: d) y = c1 + c2e
x + c3xex + c4 cos 2x+ c5 sen 2x:
10. Por observaci¶on directa encuentre una soluci¶on particular para cada una de las
siguientes ecuaciones:
(a) x3y 00 + x2y 0 + xy = 1
(b) y 00 ¡ 2y 0 = 6(c) y 00 ¡ 2y 0 = senx
11. Resolver las siguientes ecuaciones:
(a) y 00 ¡ 2y 0 + y = 2x:(b) y 00 ¡ y 0 ¡ 6y = e¡x.(c) y 00 + 4y = tan 2x:
(d) y 00 + 2y 0 + y = e¡x lnx:
(e) y 00 ¡ 2y 0 ¡ 3y = 64xe¡x:(f) y 00 + y = 2 cosx:
(g) y 00 + 4y = 4 cos 2x+ 6 cosx+ 8x2 ¡ 4x:SOL.: a)2x+4+c1e
x+c2xex: b)(¡1=4)e¡x+c1e¡2x+c2e3x: c)(¡1=4) cos 2x ln(tan(x+
¼=4)) + c1 sen 2x+ c2 cos 2x d)e¡x[(1=2)x2 lnx¡ (3=4)x2] + c1e¡x + c2xe¡x:e)¡ e¡x(8x2+4x) + c1e¡x+ c2e3x: f)c1 senx+ c2 cosx+ x senx: g)c1 sen 2x+
c2 cos 2x+ x sen 2x+ 2 cosx¡ 1¡ x+ 2x2:12. La ecuaci¶on
x2y 00 + pxy 0 + qy = 0
42

donde p y q son constantes, se llama ecuaci¶on equidimensional de Euler. Probar
que el cambio x = et la transforma en una ecuaci¶on lineal con coe¯cientes cons-
tantes, y aplicar esta t¶ecnica para encontrar la soluci¶on general de las siguientes
ecuaciones:
(a) x2y 00 + 3xy 0 + 10y = 0 (b) x2y 00 + xy 0 ¡ 16y = 0(c) 2x2y 00 + 10xy 0 + 8y = 0
13. Resolver las siguientes ecuaciones:
(a) (x2 ¡ 1)y 00 ¡ 2xy 0 + 2y = (x2 ¡ 1)2(b) (x2 + x)y 00 + (2¡ x2)y 0 ¡ (2 + x)y = x(x+ 1)2
SOL.: a) (1=6)x4¡(1=2)x2+c1x+c2(x2+1) b)¡1¡x¡(1=3)x2+c1ex+c2(1=x).14. Resolver las siguientes ecuaciones:
(a) y3) + 4y 0 = 5xex
(b) y3) + y 0 = tanx
SOL. a)xex ¡ (7=5)ex + c1 + c2 cos 2x+ c3 sen 2x: b) ln(secx)¡ senx[ln(secx+
tanx)] + c1 + c2 cosx+ c3 senx:
43

Cap¶³tulo 4
Transformada de Laplace
4.1 Introducci¶on.
Vamos a introducir en este tema una herramienta ¶util en la resoluci¶on de ecuaciones
diferenciales y sistemas de ecuaciones diferenciales. La transformada de Laplace es
un operador (act¶ua sobre funciones dando lugar a otras funciones) cuya principal
propiedad es transformar las derivadas de una funci¶on en potencias. En el caso par-
ticular de las ecuaciones lineales de coe¯cientes constantes, este operador transforma
la ecuaci¶on en un polinomio o una funci¶on racional cuyas \ra¶³ces" ( que van a ser fun-
ciones) nos van a proporcionar las soluciones de la ecuaci¶on. Resulta especialmente
¶util cuando en la ecuaci¶on intervienen funciones peri¶odicas, o un tipo particular
de funciones denominadas funciones escal¶on y funciones impulso, que aparecen en
problemas de fuerzas, ondas y corrientes el¶ectricas.
4.1.1 De¯nici¶on.- Sea f : [0;1) 7¡! R una funci¶on de¯nida para t ¸ 0. Se
denomina transformada de Laplace de f a la funci¶on F(p) de¯nida por:
F(p) =Z 1
0e¡ptf(t)dt =
= limb!1
Z b
0e¡ptf(t)dt
cuyo dominio es el conjunto de valores p 2 R para los cuales la integral impropia esconvergente.
9 Observaci¶on: ² Si la integral anterior diverge para un valor de p, entonces latransformada no est¶a de¯nida en ese punto.
² La funci¶on f se denomina funci¶on objeto y la funci¶on F se denomina funci¶on
imagen.
44

² La funci¶on F se denota tambi¶en por L(f).
Ejemplos:
1. L(1)(p) = 1psi p > 0.
Si p > 0, L(1)(p) = limb!1
R b0 e
¡ptdt = limb!1
e¡pb¡p +
1p= 1
p:
Si p · 0, L(1)(p) = limb!1
R b0 e
¡ptdt = 1, por tanto, no est¶a de¯nida la transfor-mada.
2. L(tn)(p) = n!pn+1
si p > 0.
Se obtiene este resultado aplicando el principio de inducci¶on completa:
Para n=1, si p > 0, L(t)(p) = limb7!1
R b0 e
¡pttdt = (integrando por partes) =
limb7!1
be¡pb¡p +
R10
e¡ptpdt = lim
b7!1¡e¡pb
p2+ 1
p2= 1
p2:
Si p · 0 la integral diverge.Si lo suponemos cierto para n-1, es decir L(tn¡1)(p) = (n¡1)!
pnsi p > 0, entonces
integrando por partes se obtiene:
L(tn)(p) = limb7!1
¡ bne¡pbp
+ npL(tn¡1)(p) = n!
pn+1si p > 0
3. L(eat)(p) = 1p¡a si p > a. (la demostraci¶on se deja como ejercicio).
4. Igualmente, se puede demostrar utilizando la de¯nici¶on que:
L(cos bt)(p) = p
p2 + b2si p > 0
L( sen bt)(p) = b
p2 + b2si p > 0
4.1.2 Proposici¶on.- (Linealidad de la transformada). Sean f; g : [0;1)7¡! R; siexisten F(p) y G(p) y ®; ¯ 2 R, entonces existe L(®f + ¯g)(p) y se tiene que:
L(®f + ¯g)(p) = ®F(p) + ¯G(p)
Esta propiedad se obtiene directamente de la de¯nici¶on de transformada y de las
propiedades de las integrales impropias.
10 Observaci¶on: La propiedad anterior nos permite calcular, por ejemplo, la trans-
formada de un polinomio, de forma f¶acil.
45

4.2 Condiciones de existencia de transformadas.
Puesto que la transformada de Laplace es una integral impropia, las condiciones
de existencia se basan en las condiciones para la existencia de integrales impropias,
que se han estudiado en Matem¶aticas II; en particular, utilizaremos los criterios de
comparaci¶on y el concepto de convergencia absoluta.
Para trabajar con funciones que tienen transformada de Laplace, vamos a de¯nir
dos tipos particulares de funciones :
4.2.1 De¯nici¶on.- Una funci¶on f : [0;1)7¡! R se dice continua a trozos si paracada b > 0, la funci¶on f tiene a lo sumo un n¶umero ¯nito de discontinuidades en
[0; b] y todas son de salto ¯nito.
11 Observaci¶on: Se vi¶o el curso anterior que las funciones continuas a trozos en
intervalos acotados son integrables. Como si f es continua a trozos, e¡ptf(t) tambi¶enlo es, resulta que para todo b > 0, existe
R b0 e
¡ptf(t)dt. Para que exista la integralimpropia es necesario adem¶as que jf(t)e¡ptj tienda a 0 en1, pero ya se vi¶o el cursoanterior que esto no es su¯ciente. Por ello, vamos a de¯nir otro tipo de funciones y
a dar un criterio para que la integral impropiaR10 e¡ptf(t)dt converja.
4.2.2 De¯nici¶on.- Una funci¶on f : [0;1)7¡! R se dice que es de orden exponen-cial c, si existen t0 ¸ 0 y M > 0, tales que:
jf(t)j ·Mect para cada t ¸ t0.
En el caso de que f sea de orden exponencial c, se tiene que:
je¡ptf(t)j ·Me¡(p¡c)t si t ¸ t0:
Si adem¶as f est¶a acotada en [0; t0], se puede encontrar una constante K > 0 tal que
je¡ptf(t)j · Ke¡(p¡c)t si t ¸ 0
4.2.3 Teorema.- Sea f : [0;1) 7¡! R una funci¶on continua a trozos y de ordenexponencial c. Entonces:
1. Existe F(p) si p > c.
2. limp7!1F(p) = 0.
Demostraci¶on:
Teniendo en cuenta la observaci¶on anterior, como f(t) es una funci¶on acotada en
cada intervalo cerrado (por ser continua a trozos), existe una constante K > 0 tal
que
je¡ptf(t)j · Ke(c¡p)t; si t ¸ 0.
46

Si p > c, entoncesR10 Ke¡(p¡c)tdt = KL(1)(p¡ c) = K
p¡cPor tanto, aplicando el criterio de mayoraci¶on para integrales impropias, existe la
integralR10 je¡ptf(t)jdt para p > c y se deduce la existencia de la transformada de
Laplace.
Adem¶as, 0 · R10 je¡ptf(t)jdt · R1
0 Ke(c¡p)tdt = Kp¡c .
y por tanto limp7!1F(p) = 0. 2
Como consecuencia del teorema se tiene:
² si Á(p) es una funci¶on que depende de p y no veri¯ca que limp7!1Á(p) = 0, entonces
no puede ser la transformada de Laplace de ninguna funci¶on continua a trozos y de
orden exponencial. Se puede probar un resultado m¶as general a¶un: no puede ser
la transformada de Laplace de ninguna funci¶on. En particular, las funciones log p,
sen p, cos p, ep y cualquier funci¶on racional en la que el grado del numerador sea
mayor o igual que el del denominador, no pueden ser transformadas de ninguna
funci¶on de variable real.
² Las hip¶otesis del teorema son condiciones su¯cientes, pero no necesarias; porejemplo, la funci¶on t¡1=2 no es continua a trozos en [0;1), pero si p > 0, medianteel cambio de variable pt = u2 se obtiene:
Z b
0e¡ptt¡1=2dt =
2pp
Z ppb
0e¡u
2
du
y teniendo en cuenta queR10 e¡x
2dx =
p¼2, tomando l¶³mites cuando b tiende a
1, se tiene que Z 1
0e¡ptt¡1=2dt =
s¼
p:
² No todas las funciones poseen transformada de Laplace, por ejemplo la funci¶onex
2veri¯ca que
limx7!1 e
x2¡px =1 para cualquier valor de p
y por tanto la integral impropia correspondiente a la transformada de Laplace no
converge para ning¶un valor de p. (Esta funci¶on es tambi¶en un ejemplo de funci¶on
que no es de ning¶un orden exponencial).
4.3 Transformada de derivadas e integrales.
4.3.1 Teorema.- Sea f : [0;1)7¡! R una funci¶on de clase 1 y de orden exponen-cial c. Entonces para todo p > c existe F(p) y L(f 0)(p) y se tiene:
L(f 0)(p) = pF(p)¡ f(0)
47

4.3.2 Teorema.- Sea f : [0;1)7¡! R una funci¶on de clase n y de orden exponen-cial c. Si f 0; f 00; : : : ; fn¡1) son tambi¶en de orden exponencial c, entonces existen sustransformadas para todo p > c y se cumple:
L(fn))(p) = pnF(p)¡ pn¡1f(0)¡ pn¡2f 0(0)¡ ¢ ¢ ¢ ¡ fn¡1)(0):
4.3.3 Teorema.- Sea f : [0;1)7¡! R una funci¶on continua y de orden exponencialc. Si la funci¶on
g(t) =Z t
0f(u)du
es tambi¶en de orden exponencial c, entonces para todo p > c existen F(p) y L(g)(p)y se veri¯ca:
L(g)(p) = 1
pF(p):
4.3.4 Teorema.- (Teorema del valor inicial)
Si a las hip¶otesis del teorema 4.3.1 a~nadimos que f 0 sea de orden exponencial c, secumple:
limt!0+ f(t) = lim
p!1 pL(f)(p):
4.3.5 Teorema.- (Teorema del valor ¯nal)
Si a las hip¶otesis del teorema anterior a~nadimos que c < 0 se cumple:
limt!1 f(t) = lim
p!0+ pL(f)(p):
4.4 Teoremas operacionales.
Permiten calcular m¶as r¶apidamente la transformada de Laplace de ciertas funciones.
4.4.1 Teorema.- Primer teorema de traslaci¶on (Trasladada de la funci¶on
imagen).
Si existe la transformada de Laplace de la funci¶on f en un punto p ¡ a (a 2 R),entonces existe L(eatf(t))(p) y
L(eatf(t))(p) = F(p¡ a):
(Demu¶estrese a partir de la de¯nici¶on de transformada).
Consecuencia: Permite calcular la transformada de una exponencial multiplicada
por otra funci¶on que tenga transformada. Por ejemplo:
L(eat sen (t))(p) = 1
(p¡ a)2 + 1
L(eat cos(t))(p) = (p¡ a)(p¡ a)2 + 1
Antes de ver otros resultados, introduciremos algunas funciones importantes:
48

4.4.2 De¯nici¶on.- (Funci¶on de Heaviside)
Se de¯ne como
u(t) =
(0 si t < 0
1 si t ¸ 0Para cada p > 0 existe L(u)(p) = 1
p.
4.4.3 De¯nici¶on.- (Funci¶on escal¶on)
Si a > 0 se de¯ne la funci¶on escal¶on en a como:
ua(t) =
(0 si t < a
1 si t ¸ a = u(t¡ a)
4.4.4 Proposici¶on.- Para cada p > 0 existe
L(ua)(p) = e¡pa
p:
Demostraci¶on: En efecto,
L(ua)(p) =Z 1
0e¡ptua(t)dt =
(haciendo el cambio de variable s = t¡ a)
=Z 1
¡ae¡p(s+a)u(s)ds =
Z 1
0e¡pae¡psu(s)ds =
e¡pa
p
2
4.4.5 De¯nici¶on.- (Funci¶on impulso unitario.)
Si a; b > 0 se de¯ne la funci¶on impulso unitario en [a; b] como:
ua;b(t) =
8>><>>:0 si t < a
1 si a · t · b0 si t ¸ b
4.4.6 Proposici¶on.- Para cada p > 0 existe
L(ua;b)(p) = e¡pa ¡ e¡pbp
:
Demostraci¶on: En efecto, la funci¶on ua;b(t) se puede escribir como ua ¡ ub y de ah¶³se deduce el valor de la transformada. 2
4.4.7 Teorema.- Segundo teorema de traslaci¶on (Trasladada de la funci¶on
objeto).
Sea f una funci¶on real de¯nida en R; si existe F(p) y a > 0, existe
L(ua(t)f(t¡ a))(p) = e¡apL(f)(p):
49

Demostraci¶on:
L(ua(t)f(t¡ a))(p) =Z 1
0e¡ptua(t)f(t¡ a)dt =
= ( haciendo el cambio de variable s=t-a) =Z 1
¡ae¡p(s+a)u(s)f(s)ds
=Z 1
0e¡pse¡paf(s)ds = e¡paL(f)(p):
2
12 Observaci¶on: 1. El efecto de considerar la funci¶on f(t¡ a) en lugar de f(t) esuna traslaci¶on de la funci¶on al punto a.
2. El efecto de multiplicar a la funci¶on f(t¡ a) por ua(t) es que se anula la funci¶ona la izquierda de a.
3. De hecho, si se trabaja con funciones f : [0;1) 7¡! R, para poder de¯nirL(ua(t)f(t ¡ a))(p) con a > 0 es necesario prolongar f a [¡a; 0]. Esta prolon-gaci¶on se hace habitualmente asignando el valor 0 a la funci¶on en este intervalo.
4.4.8 Teorema.- Cambio de escala.
Si existe L(f) en pa, siendo a > 0, entonces existe L(f(at))(p) y esta transformada
vale1
aL(f)(p
a)
La demostraci¶on es una simple aplicaci¶on de la de¯nici¶on de transformada.
Consecuencias:
1. Permite calcular f¶acilmente algunas transformadas.
2. Un cambio de escala en la funci¶on objeto produce un cambio de escala inverso en
la funci¶on imagen.
4.5 Aplicaci¶on a las ecuaciones diferenciales de coe¯cientes
constantes.
Dada la ecuaci¶ony00 + ay0 + by = f(x)
y(0) = y0y0(0) = y1
9>>=>>;se busca una soluci¶on y = y(x) ( es decir, una funci¶on dos veces derivable en un
intervalo [a,b] que contenga a 0, y que cumpla la ecuaci¶on en dicho intervalo).
50

Si f(x) es continua a trozos y de orden exponencial se puede demostrar ( no lo
haremos) que las funciones y; y0; y00 cumplen las mismas propiedades. Entonces,
considerando la transformada a ambos lados de la ecuaci¶on, se tiene:
L(y00 + ay0 + by)(p) = L(f(x))(p)
es decir,
p2Y(p)¡ py0 ¡ y1 + a(pY(p)¡ y0) + bY(p) = F(p)que es una ecuaci¶on algebr¶aica en Y. Despejando, se obtiene la transformada de la
funci¶on y:
Y(p) =F(p) + (p+ a)y0 + y1
p2 + ap+ b
Se puede demostrar que dos funciones continuas con id¶entica transformada son
iguales [Dettman, pg. 308], por tanto, si encontramos una funci¶on h(x), dos veces
derivable en [a,b] y cuya transformada coincida con Y(p), ser¶a la soluci¶on buscada
de la ecuaci¶on diferencial.
Ejemplo: Dado el problema
y00 + 4y = 4x
y(0) = y0y0(0) = y1
9>>=>>;Aplicando el m¶etodo anterior se obtiene:
Y(p) =1
p2 + 4
Ã4
p2+ py0 + y1
!
La funci¶on y(x) = y0 cos 2x +y12sen 2x+ x¡ 1
2sen 2x tiene por transformada Y(p)
y se puede comprobar que es la soluci¶on buscada.
El problema que nos queda por resolver es, dadaY(p), >c¶omo encontrar una funci¶on
dos veces derivable, cuya transformada sea ¶esta?.
4.6 M¶etodo de fracciones simples para el c¶alculo de la trans-
formada inversa de Laplace.
Llamamos transformada inversa de Laplace de la funci¶on Y, a una funci¶on su¯cien-
temente regular y(x) tal que L(y(x))(p) = Y(p).Hemos observado hasta ahora que la mayor parte de las transformadas son funciones
racionales Q(p)R(p)
con grado del denominador mayor que el del numerador. El m¶etodo
de fracciones simples consiste en descomponer esta funci¶on racional en fracciones
simples y determinar la antitransformada de cada una, obteniendo como soluci¶on la
51
suma de las antitransformadas. Para aquellas funciones que no son racionales, en
algunos casos, se pueden aplicar las propiedades de derivaci¶on e integraci¶on de la
transformada para obtener la antitransformada (cuando la derivada o la primitiva
de tales funciones sea racional).
En la tabla de antitransformadas pueden observarse las antitransformadas de
todos los tipos de fracciones simples existentes:
1p¡a
1(p¡a)n
1(p+A)2§B2
1((p+A)2§B2)n
4.7 Aplicaci¶on a las ecuaciones diferenciales lineales con
coe¯cientes que son polinomios de grado 1.
Derivadas e integrales de transformadas.
4.7.1 Teorema.- Sea f : [0;1)7¡! R una funci¶on continua y de orden exponencialc. Entonces para todo p > c existen L((¡t)nf(t))(p) y dnF(p)
dpny:
L((¡t)nf(t))(p) = dnF(p)
dpn
4.7.2 Teorema.- Si f : [0;1)7¡! R y f(t)tson funciones continuas a trozos y de
orden exponencial c. Entonces para todo p > c
L(f(t)t)(p) =
Z 1
pF(s)ds:
4.7.3 Proposici¶on.- Con las mismas hip¶otesis del teorema anterior, si podemos
hacer p=0, se obtiene:
limp!0+
L(f(t)t)(p) =
Z 1
0F(s)ds:
Aplicaci¶on:
La ecuaci¶on:
A(x)y00 +B(x)y0 + C(x)y = R(x)
donde A,B y C son polinomios de grado uno, se puede resolver utilizando la trans-
formada de Laplace; ¶esta convierte la ecuaci¶on en una ecuaci¶on diferencial lineal
de primer orden en L(y). Resolvi¶endola, se obtiene L(y), y antitransformando seobtiene la soluci¶on de la ecuaci¶on.
52

4.8 Otras propiedades
Producto de convoluci¶on.
4.8.1 De¯nici¶on.- Sean f y g funciones integrables. Se de¯ne la funci¶on con-
voluci¶on de f y g, que denotaremos f ¤ g, como la funci¶on de¯nida por
(f ¤ g)(t) =Z t
0f(s)g(t¡ s)ds
4.8.2 Teorema.- Si f y g son continuas a trozos y de orden exponencial c, entonces
existe L(f ¤ g)(p) para p > c y
L(f ¤ g)(p) = L(f)(p)L(g)(p):
Consecuencia:
Este teorema permite encontrar la antitransformada de ciertas funciones sin necesi-
dad de descomponer en fracciones simples, como por ejemplo:
2
p(p2 + 4)
cuya antitransformada es la convoluci¶on de las funciones 1 y sen (2t). Tambi¶en
permite obtener otras antitransformadas como la de la funci¶on:
1
(p2 + 1)2
como convoluci¶on de la funci¶on sen t consigo misma.
Funciones peri¶odicas.
4.8.3 Teorema.- Si f : [0;1) 7¡! R es una funci¶on de periodo T y continua a
trozos en [0,T], existe su transformada de Laplace para p > 0 y
L(f)(p) =R T0 e
¡ptf(t)dt1¡ e¡pT
Demostraci¶on:
Por ser continua a trozos en [0,T] y peri¶odica, es de orden exponencial 0. Entonces,
si p > 0, se tiene:
L(f)(p) =Z 1
0e¡ptf(t)dt =
Z T
0e¡ptf(t)dt+
Z 1
Te¡ptf(t)dt =
(haciendo el cambio de variable s = t¡ T )
=Z T
0e¡ptf(t)dt+
Z 1
0e¡p(s+T )f(s+ T )ds =
53

=Z T
0e¡ptf(t)dt+ e¡pT
Z 1
0e¡psf(s)ds:
Despejando, se obtiene el resultado. 2
Ejemplo:
L( sen t)(p) =R 2¼0 e¡pt sen tdt1¡ e¡2¼p =
1
1 + p2:
4.9 Delta de Dirac
A menudo los sistemas mec¶anicos o el¶ectricos est¶an sometidos a fuerzas de gran
magnitud que act¶uan durante un intervalo de tiempo muy peque~no. Vamos a cons-
truir funciones que nos pueden servir de modelo para tales fuerzas: Para ² > 0,
consideremos
±²(t¡ a) =
8>>><>>>:1
²si a < t < a+ ²
0 si t · a ¶o t ¸ a+ ²Conviene observar:
1. La variaci¶on de las gr¶a¯cas de las funciones ±² cuando ² se hace cada vez m¶as
peque~no.
2.Z 1
¡1±² = 1
3. L(±²) = Lµ1
²(u(t¡ a)¡ u(t¡ (a+ ²)))
¶=1
²
"e¡ap
p¡ e
¡(a+²)p
p
#
4. Cuando ² ! 0, no tiene sentido lim²!0 ±²(t ¡ a) como una funci¶on propiamentedicha, pero podemos considerar una \especie de funci¶on" de¯nida como
±(t¡ a) = lim²!0 ±²(t¡ a)
que vale in¯nito en el punto a y 0 en los restantes. La llamaremos \delta de
Dirac" en el punto a, y la manejaremos por sus propiedades:
(a)Z 1
¡1± = 1
(b)
L(±(t¡ a)) = L(lim²!0 ±²) = lim²!0L(±²) =
= lim²!0
e¡ap(1¡ e¡²p)²p
= e¡ap
(en el ¶ultimo paso hemos aplicado la regla de L'Hopital).
En particular cuando a = 0, L(±(t)) = 1
54

Observemos que limp!1 L(±(t))(p)6! 0, lo que nos corrobora que, en efecto, la
delta de Dirac no es una funci¶on.
Por otra parte, la delta se puede considerar una \especie de derivada" de la
funci¶on u escal¶on.
55
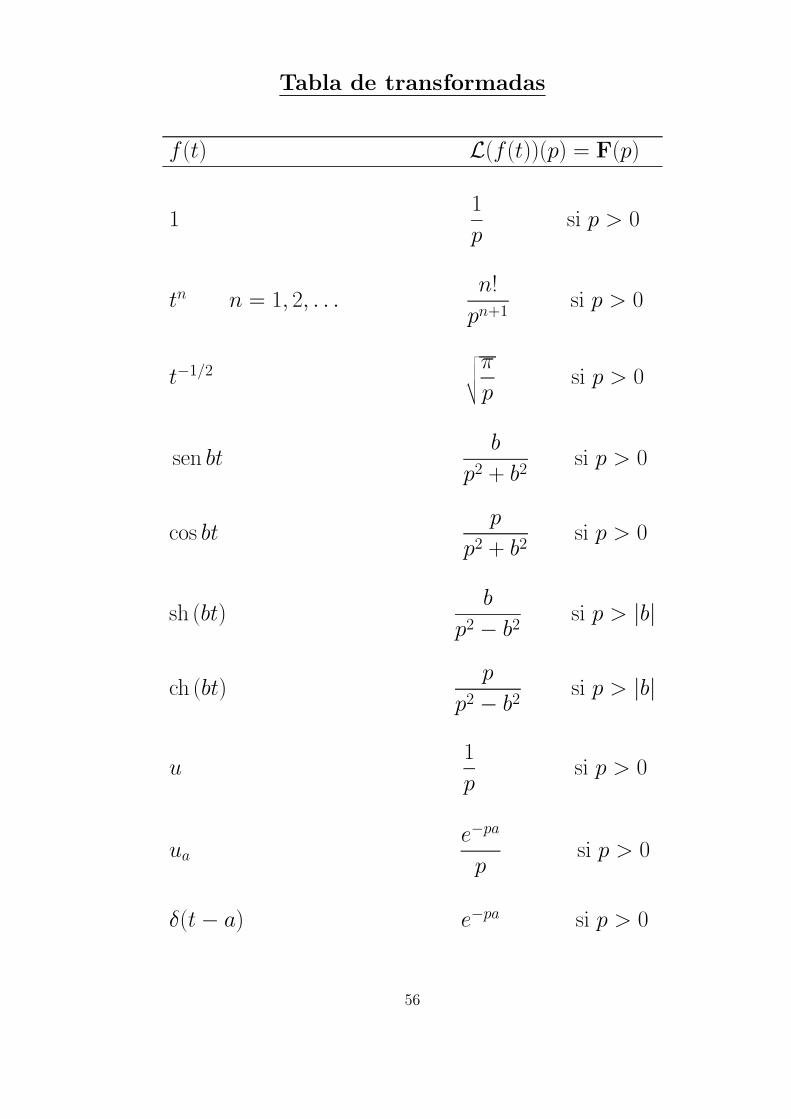
Tabla de transformadas
f(t) L(f(t))(p) = F(p)
11
psi p > 0
tn n = 1; 2; : : :n!
pn+1si p > 0
t¡1=2vuut¼p
si p > 0
sen btb
p2 + b2si p > 0
cos btp
p2 + b2si p > 0
sh (bt)b
p2 ¡ b2 si p > jbj
ch (bt)p
p2 ¡ b2 si p > jbj
u1
psi p > 0
uae¡pa
psi p > 0
±(t¡ a) e¡pa si p > 0
56

Tabla de propiedades
f(t) L(f(t))(p) = F(p)
f 0 pF(p)¡ f(0)
fn) pnF(p)¡ pn¡1f(0)¡ pn¡2f 0(0)¡ ¢ ¢ ¢ ¡ fn¡1)(0)Z t0f(u)du
1
pF(p)
f(at)1
aF(p
a)
(¡t)nf(t) dnF(p)
dpn
f(t)
t
Z 1pF(u) du
eatf(t) F(p¡ a)
u(t¡ a)f(t¡ a) e¡apF(p)
Z t0f(u)g(t¡ u) du F(p)G(p)
f T-peri¶odicaRT0 e
¡ptf(t)dt1¡ e¡pT
57

4.10 Ejercicios:
1. Si f : [0;1)7¡! R es una funci¶on de orden exponencial c y g : [0;1)7¡! R esde orden exponencial d, >de qu¶e orden exponencial es f + g y fg?.
2. Demostrar que si limt7!1jf(t)ject
es ¯nito, entonces f es de orden exponencial c.
3. Calcular la transformada de Laplace de las funciones siguientes:
(a) f(t) = [t]¡ t donde [t] denota la parte entera de t.(b) f(t) = [t] ( poner esta funci¶on como suma de dos funciones cuya transformada
de Laplace sea conocida).
(c) f(t) =
(1 si t 2 [na; (n+ 1)a] con n 2 N par0 si t 2 [na; (n+ 1)a] con n 2 N impar (onda cuadrada).
(d) f(t) = j sen tj.
4. Resolver las siguientes ecuaciones diferenciales:
(a) y0 + y = 3e2t, y(0) = 0.
(b) y00 ¡ 4y0 + 4y = 0, y(0) = 0, y0(0) = 3.(c) y00 + 2y0 + 2y = 2, y(0) = 0, y0(0) = 1.
(d) y00 + y0 = 3t2, y(0) = 0, y0(0) = 1.
(e) y00 + 2y0 + y = u1(t)¡ 2u2(t) + u3(t), y(0) = y0(0) = 0.(f) ty00 + (2t+ 3)y0 ¡ (4t+ 9)y = 0, y(0) = 1.(g) ty00 + (3t¡ 1)y0 + 3y = 6e¡3t, y(0) = 1, y(5) = 2.5. Utilizando la propiedad de la transformada de Laplace:
¡ ddpL(f)(p) = L(tf(t))(p);
encontrar la antitransformada de las funciones siguientes (se sugiere derivar estas
funciones, antitransformar y aplicar la propiedad mencionada):
(a) arctg 1p.
(b) log³p¡3p+1
´.
(c) log³p2+1p2+4
´.
6. La de°exi¶on est¶atica en una viga rectil¶³nea uniforme de longitud L que soporta una
carga w(x) por unidad de longitud, se obtiene a partir de la ecuaci¶on diferencial:
EIyiv)(x) = w(x)
58

en donde E es el m¶odulo de elasticidad del material e I es el momento de inercia
de una secci¶on transversal de la viga. Para una viga en voladizo empotrada en su
extremo izquierdo (x=0) y libre en su extremo derecho (x=L), se tiene que Y(x)
debe satisfacer:
y(0) = 0, y0(0) = 0, y00(L) = 0, y000(L) = 0.
Las dos primeras condiciones expresan que la de°exi¶on est¶atica de la viga y la
pendiente son cero en x = 0 y las dos ¶ultimas dicen que el momento °exionante
y la fuerza cortante son 0 en x = L. Usar la transformada de Laplace para
determinar la soluci¶on y(x) de este problema de contorno, cuando una carga
constante w0 se distribuye uniformemente a lo largo de la viga, es decir, cuando
w(x) = w0, 0 · x · L.
59

Cap¶³tulo 5
Sistemas de ecuacionesdiferenciales.
5.1 Preliminares.
De¯niciones
Sea una matriz A(t) = (aij(t))i;j=1:::n donde aij(t) son funciones de¯nidas en un
intervalo I;
5.1.1 De¯nici¶on.- Diremos que la matriz A es continua en el punto t0 2 I, si cadauna de las funciones aij es continua en el punto t0.
5.1.2 De¯nici¶on.- Diremos que la matriz A es derivable en el punto t0 2 I, si cadauna de las funciones aij es derivable en el punto t0. Si la matriz A(t) es derivable
en todo I, de¯nimos la matriz derivada por: A0(t) = (a0ij(t))i;j=1;::: ;n t 2 I
5.1.3 Proposici¶on.- Son inmediatas las siguientes propiedades:
² d
dt(CA) = C:
d
dt(A) donde C es una matriz constante
² d
dt(A+B) =
d
dt(A) +
d
dt(B)
² d
dt(A:B) =
d
dt(A):B +A:
d
dt(B).
5.1.4 De¯nici¶on.- Diremos que la matriz A es integrable en I, si cada una de las
funciones aij es integrable en I. Si la matriz A(t) es integrable en I, de¯nimos la
integral de la matriz A(t) en el intervalo I = [a; b] porZ b
aA(t) dt = (
Z b
aaij(t) dt)i;j=1;::: ;n
60

5.1.5 De¯nici¶on.- Dada la familia de matrices Ak = (a(k)ij )i;j=1;::: ;n k = 1; 2; : : : se
de¯ne la matriz1Pk=1Ak = lim
n!1nPk=1Ak como aquella matriz que tiene por elemento
aij a1Pk=1a(k)ij .
Sistemas en forma normal
Un sistema de n ecuaciones diferenciales de primer orden escrito en forma normal
es un sistema de la forma: 8>>>>><>>>>>:
y01 = f1(t; y1; : : : ; yn)y02 = f2(t; y1; : : : ; yn)
...
y0n = fn(t; y1; : : : ; yn)
Es decir, en realidad es una ecuaci¶on diferencial vectorial
~y 0 = ~f(t; ~y) t 2 I intervalo
Si Á1; : : : ; Án son n funciones, diremos que (Á1; : : : ; Án) es una soluci¶on de dicho
sistema en el intervalo I, si se veri¯ca:
² Á1; : : : ; Án, son derivables en el intervalo I² (t; Á1(t); : : : ; Án(t)) 2 Dom(fi) 8i = 1; 2; : : : ; n² 8>>>>><>>>>>:
Á01(t) = f1(t; Á1(t); : : : ; Án(t))
Á02(t) = f2(t; Á1(t); : : : ; Án(t))...
......
Á0n(t) = fn(t; Á1(t); : : : ; Án(t))
8t 2 I
Nota: Aunque s¶olo estudiaremos sistemas de primer orden, observemos que
algunos sistemas de orden superior al primero, pueden convertirse en sistemas de
primer orden en forma normal, sin m¶as que aumentar el n¶umero de inc¶ognitas. Por
ejemplo, dado el sistema: 8>>><>>>:d2y1dt2
= 2dy1dt+ 3y2 + e
2t
d2y2dt2
= ¡y1 ¡ 2dy2dt
si hacemos z1 = y1; z2 =dy1dt; z3 = y2; z4 =
dy2dt
obtenemos el sistema de primer
orden:
61

8>>>>>>>>>>>>><>>>>>>>>>>>>>:
dz1dt= z2
dz2dt= 2z2 + 3z3 + e
2t
dz3dt= z4
dz4dt= ¡z1 ¡ 2z4
5.2 Sistemas lineales de primer orden
Son aquellos de la forma:8>>>>><>>>>>:
y01 = a11(t)y1 + a12(t)y2 + ¢ ¢ ¢+ a1n(t)yn + b1(t)y02 = a21(t)y1 + a22(t)y2 + ¢ ¢ ¢+ a2n(t)yn + b2(t)...
...
y0n = an1(t)y1 + an2(t)y2 + ¢ ¢ ¢+ ann(t)yn + bn(t)donde las aij(t) y bi(t) son funciones continuas en un intervalo I para i; j = 1; : : : ; n:
Escribiremos este sistema m¶as c¶omodamente en forma matricial:
~y 0 = A(t)~y +~b(t) t 2 I (sl)
donde A(t) = (aij(t))i;j=1;::: ;n y ~b(t) = (b1(t); : : : ; bn(t))T
Cuando ~b(t) ´ ~0, el sistema se llama homog¶eneo; y cuando los coe¯cientes aij sonconstantes, el sistema se llama de coe¯cientes constantes.
Un problema de Cauchy para el sistema lineal (sl), es(~y 0 = A(t)~y +~b(t)~y(t0) = ~y0
t 2 I
donde t0 2 I e ~y0 2 Rn.
Condiciones de existencia y unicidad
5.2.1 Teorema.- Consideremos el problema de Cauchy(~y 0 = A(t)~y +~b(t)~y(t0) = ~y0
t 2 I
donde las componentes de A(t) y ~b(t) son funciones continuas en un intervalo I de
R, t0 2 I e ~y0 es un vector arbitrario de Rn.Entonces, existe una soluci¶on de dicho problema de Cauchy, ~y(t), de¯nida y de
clase C1 en todo el intervalo I. Adem¶as, si ~z(t) es otra soluci¶on de este problema,
entonces, en el intervalo com¶un de de¯nici¶on, ambas soluciones coinciden.
62

5.2.2 Corolario.- Si ~y(t) es soluci¶on del sistema homog¶eneo
~y 0 = A(t)~y
y se anula en un punto, entonces ~y(t) ´ ~0 en todo el intervalo de de¯nici¶on.
Transformaci¶on de una ecuaci¶on lineal de orden n en un sistema lineal de
primer orden
La ecuaci¶on lineal de orden n
yn) + a1(t)yn¡1) + : : :+ an¡1(t)y0 + an(t)y = p(t)
se transforma mediante el cambio
y1 = y ; y2 = y0 ; : : : ; yn = y
n¡1)
en 8>>>>>>>><>>>>>>>>:
y01 = y2y02 = y3...
......
y0n¡1 = yny0n = p(t)¡ an(t)y1 ¡ : : :¡ a1(t)yn
Es decir, en el sistema
~y 0 =M(t)~y + ~p(t)
donde
M(t) =
266666666664
0 1 0 : : : 0 0
0 0 1 : : : 0 0
0 0 0 : : : 0 0...
......
......
...
0 0 0 : : : 0 1
¡an(t) ¡an¡1(t) ¡an¡2(t) : : : ¡a2(t) ¡a1(t)
377777777775y ~p(t) =
266666666664
0
0
0...
0
p(t)
377777777775
5.3 Sistemas lineales homog¶eneos
5.3.1 Proposici¶on.- Las soluciones de un sistema lineal homog¶eneo de n ecua-
ciones
~y 0 = A(t)~y
forman un espacio vectorial de dimensi¶on n.
63

Demostraci¶on:
Es inmediato comprobar que cualquier combinaci¶on lineal de soluciones es soluci¶on
del sistema homog¶eneo, por lo que ¶estas forman un espacio vectorial.
Encontremos una base de dicho espacio:
Sean ~a1;~a2; : : : ;~an; una base de Rn y t0 un punto arbitrario de I. Para k =
1; 2; : : : ; n el teorema de existencia y unicidad garantiza que existe una ¶unica
soluci¶on ~yk(t) del problema de Cauchy(~y 0 = A(t) ~y~y(t0) = ~ak
Veamos que ~y1(t); ~y2(t); : : : ; ~yn(t); constituyen la base buscada.
² Son linealmente independientes en I ya que si ¸1~y1(t) + : : : + ¸n~yn(t) ´ ~0 escri-biendo dicha igualdad en el punto t0, tendremos
¸1~a1 + : : :+ ¸n~an = ~0
y por ser ~a1; : : : ;~an linealmente independientes, se deduce que
¸1 = ¸2 = : : : = ¸n = 0
² Constituyen un sistema generador. En efecto, sea ~y(t) una soluci¶on del sistema;y consideremos ~v = ~y(t0). Como los ~a1; : : : ;~an son sistema de generadores en Rn,sean ¸1; ¸2; : : : ; ¸n tales que ~v = ¸1~a1 + ¸2~a2 + : : : + ¸n~an Las soluciones ~y(t) y
¸1~y1 + ¸2~y2 + : : :+ ¸n~yn del sistema homog¶eneo valen lo mismo en t0, luego por
el corolario 5.2.2 aplicado a su diferencia, se deduce que
~y ´ ¸1~y1 + ¸2~y2 + : : :+ ¸n~yn
Sistemas fundamentales de soluciones
5.3.2 De¯nici¶on.- Una base del espacio de soluciones del sistema homog¶eneo
~y 0 = A(t)~y
se llama sistema fundamental de soluciones de dicho sistema. Una matriz Y (t) cuyas
columnas ~y1(t); ~y2(t); : : : ; ~yn(t) constituyen un conjunto fundamental de soluciones,
se llama matriz fundamental del sistema.
Es obvio que la soluci¶on general del sistema ser¶a:
~y(t) = c1~y1 + c2~y2 + : : :+ cn~yn = Y (t)~c
donde c1; : : : ; cn son constantes arbitrarias y ~c = (c1; : : : ; cn)T
64

5.3.3 Proposici¶on.- Si Y (t) es una matriz cuyas columnas son soluciones del sis-
tema
~y 0 = A(t)~y
entonces Y veri¯ca la ecuaci¶on matricial
Y 0 = AY
llamada \ ecuaci¶on matricial asociada" al sistema.
Rec¶³procamente, si Y veri¯ca la ecuaci¶on matricial, entonces sus columnas son
soluci¶on del sistema ~y 0 = A(t)~y.
Demostraci¶on: Es inmediata.
5.3.4 Proposici¶on.- Si Y (t) es una matriz cuyas columnas son soluciones del sis-
tema, entonces son equivalentes las siguientes propiedades:
i) Y (t) es una matriz fundamental, es decir, sus columnas son linealmente indepen-
dientes.
ii) Existe un t0 tal que detY (t0)6= 0iii) Para todo t 2 I se veri¯ca que detY (t)6= 0
5.4 Soluciones de un sistema no homog¶eneo. Variaci¶on de
los par¶ametros.
Denotemos(sl) ~y 0 = A(t)~y +~b(t) t 2 I(sh) ~y 0 = A(t)~y t 2 I
y estudiemos la relaci¶on que existe entre las soluciones de (sl) y de (sh).
5.4.1 Proposici¶on.- Sea ~y1(t); ~y2(t); : : : ; ~yn(t) un sistema fundamental de (sh) e
Y (t) la correspondiente matriz fundamental; sea ~yp(t) una soluci¶on de (sl), (que
llamaremos soluci¶on particular). Entonces, la soluci¶on general del sistema (sl) es
~y(t) = ~yp(t) + Y (t)~c = ~yp(t) + c1~y1(t) + : : :+ cn~yn(t)
donde el vector ~c o las constantes c1; : : : ; cn toman valores arbitrarios.
Demostraci¶on: Es inmediato comprobar que
~yp(t) + c1~y1(t) + : : :+ cn~yn(t)
es soluci¶on de (sl), para constantes cualesquiera.
Por otra parte, si ~y(t) es una soluci¶on cualquiera de (sl), entonces ~y(t) ¡ ~yp(t) es
65

soluci¶on del sistema (sh), y como ~y1(t); ~y2(t); : : : ; ~yn(t) es un sistema fundamental de
(sh), entonces ~y(t)¡~yp(t) se expresa como combinaci¶on lineal de ~y1(t); ~y2(t); : : : ; ~yn(t),es decir
~y(t)¡ ~yp(t) = c1~y1(t) + : : :+ cn~yn(t)para una elecci¶on adecuada de las constantes. 2
5.4.2 Proposici¶on.- (Principio de superposici¶on de soluciones).
Si ~yp1(t); ~yp2(t), son soluciones respectivas, de los sistemas
~y 0 = A(t)~y +~b1(t) t 2 I ; ~y 0 = A(t)~y +~b2(t) t 2 I
entonces ~yp1(t) + ~yp2(t) es soluci¶on del sistema
~y 0 = A(t)~y +~b1(t) +~b2(t) t 2 I
Demostraci¶on: Es trivial.
5.4.3 Proposici¶on.- M¶etodo de variaci¶on de los par¶ametros.
Ya estudiamos el m¶etodo de variaci¶on de los par¶ametros para ecuaciones lineales de
segundo orden, que consist¶³a en que si la soluci¶on general de la ecuaci¶on homog¶enea
era de la forma yh(t) = c1y1(t) + c2y2(t) donde y1(t) y y2(t) son soluciones lineal-
mente independientes de la ecuaci¶on homog¶enea, entonces busc¶abamos una soluci¶on
particular de la ecuaci¶on no homog¶enea de la forma yp(t) = v1(t)y1(t) + v2(t)y2(t)
donde v1(t) y v2(t) eran dos funciones que deb¶³amos determinar. Vamos a emplear
para sistemas la misma idea:
Supongamos que conocemos una matriz fundamental Y (t) del sistema homog¶eneo
~y 0(t) = A(t)~y(t)
Puesto que la soluci¶on general del sistema homog¶eneo viene dada por ~yh(t) = Y (t)~c,
donde ~c es un vector constante, buscaremos una soluci¶on particular del sistema no
homog¶eneo
~y 0(t) = A(t)~y(t) +~b(t)
de la forma ~yp(t) = Y (t)~v(t) donde ~v(t) = [v1(t); : : : ; ~vn(t)]T es una funci¶on vectorial
a determinar. Como
~yp(t)0 = Y (t)~v 0(t) + Y 0(t)~v(t)
sustituyendo en el sistema debe veri¯carse:
Y (t)~v 0(t) + Y 0(t)~v(t) = A(t)Y (t)~v(t) +~b(t)
y como Y 0(t) = A(t)Y (t) , se deduce que se debe veri¯car que
Y (t)~v 0(t) = ~b(t)
66

de manera que
~v 0(t) = [Y (t)]¡1~b(t)
e integrando
~v(t) =Z[Y (t)]¡1~b(t) dt
con lo que la soluci¶on particular buscada ser¶a:
~yp(t) = Y (t)~v(t) = Y (t):Z[Y (t)]¡1~b(t) dt
y la soluci¶on general ser¶a:
~y(t) = Y (t)~c+ Y (t):Z[Y (t)]¡1~b(t) dt
En particular, la soluci¶on del sistema que veri¯ca la condici¶on inicial ~y(t0) = ~y0ser¶a:
~y(t) = Y (t)[Y (t0)]¡1~y0 + Y (t):
Z t
t0[Y (s)]¡1~b(s) ds
Insistamos en que para aplicar las f¶ormulas de variaci¶on de los par¶ametros es nece-
sario determinar previamente una matriz fundamental del sistema homog¶eneo aso-
ciado. Estudiaremos esto m¶as adelante para matrices de coe¯cientes constantes.
Veamos un ejemplo del m¶etodo de variaci¶on de los par¶ametros.
5.4.4 Ejemplo.-
Resolver
~y 0(t) =
"2 ¡31 ¡2
#~y(t) +
"e2t
1
#sabiendo que una matriz fundamental para el sistema homog¶eneo asociado es
Y (t) =
"3et e¡t
et e¡t
#:
Calculamos
[Y (t)]¡1 =1
2
"e¡t ¡e¡t¡et 3et
#con lo que
[Y (t)]¡1:~b(t) =1
2
"e¡t ¡e¡t¡et 3et
# "e2t
1
#=1
2
"et ¡ e¡t¡e3t + 3et
#
Z[Y (t)]¡1:~b(t) =
1
2
" Ret ¡ e¡t dtR ¡e3t + 3et dt
#=1
2
"et + e¡t
¡1=3e3t + 3et#
67

Y (t)Z[Y (t)]¡1:~b(t) =
1
2
"3et e¡t
et e¡t
#:
"et + e¡t
¡1=3e3t + 3et#=
=1
2
"3e2t + 3¡ 1=3e2t + 3e2t + 1¡ 1=3e2t + 3
#=
"4=3e2t + 3
1=3e2t + 2
#La soluci¶on general ser¶a:
~y(t) = Y (t)~c+ ~yp(t) = c1et
"3
1
#+ c2e
¡t"1
1
#+
"4=3e2t + 3
1=3e2t + 2
#
5.5 Sistemas lineales homog¶eneos de coe¯cientes constantes
B¶usqueda de soluciones
Consideremos el sistema
~y 0(t) = A~y(t)
donde A es una matriz cuadrada, real y constante de orden n. La soluci¶on general
que buscamos estar¶a de¯nida para todo t 2 R , ya que los elementos de A son
funciones constantes, y por lo tanto continuas en R.Como ya sabemos, la soluci¶on general del sistema homog¶eneo se puede construir
a partir de un conjunto fundamental de soluciones. Nuestro objetivo, entonces, es
encontrar n soluciones del (sh), linealmente independientes.
Busquemos soluciones de la forma ~y(t) = e¸t~v donde ~v es un vector constante.
Comod
dte¸t~v = ¸e¸t~v A(e¸t~v) = e¸tA~v
e¸t~v ser¶a soluci¶on del (sh) si, y s¶olo si, A~v = ¸~v, es decir, si ¸ es un autovalor de la
matriz A y ~v un autovector correspondiente a ¸.
Resoluci¶on en un caso particular
5.5.1 Teorema.- Si la matriz constante A, de orden n, tiene n vectores propios li-
nealmente independientes, ~v1; : : : ; ~vn, correspondientes a los autovalores ¸1; : : : ; ¸n(no necesariamente distintos), entonces fe¸1t~v1; : : : ; e¸nt~vng es un conjunto funda-mental de soluciones del sistema
~y 0(t) = A~y(t)
en R, y por tanto la soluci¶on general de este sistema es:
~y(t) = c1e¸1t~v1 + : : :+ cne
¸nt~vn
68

Demostraci¶on: Es obvio que son n soluciones. Veamos que son linealmente indepen-
dientes:
det[e¸1t~v1je¸2t~v2j : : : je¸nt~vn] = e(¸1+:::+¸n)t:det[~v1j : : : j~vn]6= 0
ya que la funci¶on exponencial no se anula nunca y los vectores ~v1; : : : ; ~vn son lineal-
mente independientes.
Recordemos algunos casos en que una matriz tiene n vectores linealmente indepen-
dientes.
5.5.2 Proposici¶on.- Si ¸1; : : : ; ¸n, son valores propios distintos de A y ~vi es un
vector propio asociado a ¸i, para cada i, entonces los vectores ~v1; : : : ; ~vn son lineal-
mente independientes.
5.5.3 Corolario.- Si la matriz A tiene n autovalores distintos ¸1; : : : ; ¸n y ~vi es un
vector propio asociado a ¸i, entonces fe¸1t~v1; : : : ; e¸nt~vng es un sistema fundamentalde ~y 0(t) = A~y(t)
5.5.4 Proposici¶on.- Una matriz real A de orden n, sim¶etrica, tiene n autovalores
reales y n vectores propios linealmente independientes.
Ejercicio: Resolver el sistema
~y 0(t) = A~y(t) donde A =
0BBBBBBB@
1 1 1 1 1
2 2 2 2 2
3 3 3 3 3
4 4 4 4 4
5 5 5 5 5
1CCCCCCCAObservamos que
A~y = A
0BBBBBBB@
y1y2y3y4y5
1CCCCCCCA = (y1 + y2 + y3 + y4 + y5)0BBBBBBB@
1
2
3
4
5
1CCCCCCCA (5.1)
Por tanto, para los puntos que veri¯quen y1 + y2 + y3 + y4 + y5 = 0 tendremos que
A
0BBBBBBB@
y1y2y3y4y5
1CCCCCCCA = 00BBBBBBB@
y1y2y3y4y5
1CCCCCCCA
69

y dichos puntos ser¶an vectores propios asociados a ¸ = 0. Tomemos entre ellos a
cuatro linealmente independientes:
(1; 0; 0; 0;¡1); (0; 1; 0; 0;¡1); (0; 0; 1; 0;¡1); (0; 0; 0; 1;¡1)
Por otra parte, en 5.1, observamos que
A
0BBBBBBB@
1
2
3
4
5
1CCCCCCCA = (1 + 2 + 3 + 4 + 5)0BBBBBBB@
1
2
3
4
5
1CCCCCCCA = 150BBBBBBB@
1
2
3
4
5
1CCCCCCCAluego el otro valor propio es 15, y un vector propio (1; 2; 3; 4; 5). Luego la soluci¶on
del sistema es
~y(t) = c1
0BBBBBBB@
1
0
0
0
¡1
1CCCCCCCA+ c20BBBBBBB@
0
1
0
0
¡1
1CCCCCCCA+ c30BBBBBBB@
0
0
1
0
¡1
1CCCCCCCA+ c40BBBBBBB@
0
0
0
1
¡1
1CCCCCCCA+ c5e15t
0BBBBBBB@
1
2
3
4
5
1CCCCCCCA
Ejercicio: Resolver
~y 0(t) =
26641 2 ¡11 0 1
4 ¡4 5
3775 ~y(t) ; ~y(0) =
2664¡10
0
3775Resoluci¶on en el caso general
Estudiemos ahora la resoluci¶on del (sh)
~y 0(t) = A~y(t) A matriz real constante n£ n
cuando la matriz A tiene exactamente k · n autovectores linealmente independien-tes. Observemos que la soluci¶on de la ecuaci¶on escalar
y0 = ay a 2 R
es y(t) = Ceat. Podr¶³amos pensar que tal vez la soluci¶on del (sh) fuera ~y(t) = eAt~v,
donde ~v es un vector constante.
Sin embargo, eAt no est¶a de¯nida ya que A es una matriz. Pero, recordemos que
cuando a es un escalar
eat = 1 + at+a2t2
2!+ : : :+
antn
n!+ : : :
70

y, por tanto, parece l¶ogico de¯nir cuando A es una matriz
eAt = I +At+A2t2
2!+ : : :+
Antn
n!+An+1tn+1
(n+ 1)!+ : : :
Se puede demostrar que esta serie converge para todo t y que se puede derivar
t¶ermino a t¶ermino, obteni¶endose que
d
dteAt = A+A2t+
A3t2
2!+ : : :+
An+1tn
n!+ : : : =
= A(I +At+A2t2
2!+ : : :+
Antn
n!+ : : : ) = AeAt
con lo qued
dteAt~v = AeAt~v = A (eAt~v)
y, por tanto eAt~v es soluci¶on del sistema homog¶eneo (sh) para cada vector
constante ~v. Se deduce de aqu¶³ que como las columnas de la matriz eAt son eAt~ei,
entonces las columnas de eAt son soluciones del sistema (sh).
Propiedades de la matriz exponencial:
1. eA0 = e0 = I
2. erI = erI
3. eA(t+s) = eAteAs
4. e(A+B)t = eAteBt () AB = BA
5. (eAt)¡1 = e¡At
En particular, de la propiedad 5) se deduce que eAt es inversible, y que por tanto,
sus columnas son linealmente independientes, y como eran soluciones, eAt es una
matriz fundamental del (sh) Por desgracia, aunque te¶oricamente el problema
est¶a resuelto, el c¶alculo de eAt no es f¶acil. Ya veremos en los ejercicios algunos casos
en los que este c¶alculo es sencillo.
Estudiemos ahora la relaci¶on que existe entre matrices fundamentales:
5.5.5 Proposici¶on.- Si ©(t) es una matriz fundamental del (sh) y C es una ma-
triz constante no singular, la matriz ©(t)C es una matriz fundamental del (sh).
Adem¶as, cualquier otra matriz fundamental es de la forma ©(t)C con C no singu-
lar.
Demostraci¶on: Sea C una matriz no singular y ©(t) una matriz fundamental.
[©(t)C]0 = ©0(t)C = A©(t)C = A[©(t)C]
71

y como
det(©(t)C) = det(©(t)): detC6= 0 8t 2 [a; b]cualquier matriz ©(t)C ser¶a fundamental.
Rec¶³procamente , si ¤(t) es fundamental, consideremos la matriz no singular ¡(t) =
©¡1(t)¤(t); es decir ¤(t) = ©(t) ¡(t).
Debemos ver que ¡(t) es constante. En efecto,
¤0(t) = ©0(t)¡(t) + ©(t)¡0(t)
teniendo en cuenta que ¤ y © son fundamentales, y por tanto veri¯can la ecuaci¶on
matricial asociada, sustituyendo en ambos miembros,
A¤(t) = A©(t)¡(t) + ©(t)¡0(t) = A¤(t) + ©(t)¡0(t)
lo que implica que ©(t):¡0(t) = 0 8t y como ©(t) es inversible por ser una matrizfundamental, resulta que ¡0(t) = 0 8t , de donde se deduce que ¡(t) es constante.
Relaci¶on entre la matriz eAt y otra matriz fundamental
Supongamos ahora que conocemos una matriz fundamental X(t) del (sh). Como
eAt es tambi¶en una matriz fundamental, deducimos de la proposici¶on 5.5.5 que
eAt = X(t)C
Haciendo t = 0 en esta expresi¶on, se obtiene I = X(0)C, es decir C = (X(0))¡1 =X¡1(0), y por tanto
eAt = X(t)X¡1(0)
Construcci¶on efectiva de una matriz fundamental
Pero seguimos sin conocer en forma pr¶actica ninguna matriz fundamental. Sabemos
que eAt~v es soluci¶on del (sh) para cualquier vector ~v; por tanto, si ~v1; : : : ; ~vn, son
vectores columna linealmente independientes, la matriz
(eAt~v1 jeAt~v2 j : : : jeAt~vn)es una matriz cuyas columnas son soluci¶on, que coincide con eAt(~v1 j : : : j~vn) = eAtC,donde C es una matriz no singular, y por la proposici¶on 5.5.5, se tratar¶a de una
matriz fundamental.
Ahora, el \truco" consiste en elegir los vectores ~v1; : : : ; ~vn de forma que eAtvi se
calcule f¶acilmente. Veamos esto:
Como, (por las propiedades 2) y 4)), eAt = erte(A¡rI)t tendremos que:
eAt~v = erte(A¡rI)t~v =
72

= ert[I + (A¡ rI)t+ (A¡ rI)2t2
2!+ : : : ]~v =
= ert[~v + (A¡ rI)t~v + (A¡ rI)2t2
2!~v + : : : ]
Si elegimos ~v tal que (A ¡ rI)k~v = ~0 para alg¶un r y alg¶un k, la suma anterior esuna suma ¯nita inmediata de calcular, ya que (A¡ rI)k+l~v = (A¡ rI)l(A¡ rI)k~v =(A¡ rI)l~0 = ~0 8l = 1; 2 : : :5.5.6 De¯nici¶on.- Sea A una matriz constante n £ n, y r un valor propio de A.Un vector no nulo ~v que satisfaga
(A¡ rI)k~v = ~0
para alg¶un entero positivo k, se llama vector propio generalizado asociado a r.
Un resultado de ¶algebra que no demostraremos, asegura que si el polinomio carac-
ter¶³stico de A tiene los autovalores (complejos) r1; r2; : : : ; rk de multiplicidades
m1;m2; : : : ;mk, respectivamente, entonces para cada i = 1; : : : ; k existen mi vec-
tores propios generalizados linealmente independientes, asociados con ri, de forma
que el conjunto de los n = m1 + : : : +mk vectores propios generalizados es lineal-
mente independiente.
Adem¶as, si ~vi es un vector propio generalizado asociado con ri, veri¯ca que
(A¡ riI)mi~vi = ~0
Por tanto:
M¶ETODO para obtener un conjunto fundamental de soluciones de la ecuaci¶on ho-
mog¶enea de coe¯cientes constantes
~y 0 = A~y
1. Calculamos el polinomio caracter¶³stico de A para encontrar los valores propios
distintos r1; r2; : : : ; rk.
2. Para cada valor propio ri encontramos mi vectores propios generalizados lineal-
mente independientes, donde mi es la multiplicidad de ri. (Todos ellos deben
veri¯car que (A¡ riI)mi~v = ~0)
3. Usamos los n vectores propios generalizados obtenidos en el paso anterior para
calcular las n soluciones linealmente independientes de la forma
eAt~v = ert[~v + t(A¡ rI)~v + t2(A¡ rI)2
2!~v + : : : ]
(Si r tiene multiplidad m, la serie anterior tiene m sumandos.)
73

Dichas soluciones, que denotaremos ~yi, constituyen las columnas de una matriz
fundamental Y (t). A partir de ella, podemos calcular
eAt = Y (t)Y ¡1(0)
Notas:
1. Si la matriz A tiene n vectores propios linealmente independientes, el m¶etodo
proporciona las soluciones er1t~v1; : : : ; ernt~vn ya conocidas.
2. Obs¶ervese que si se trataba de obtener la soluci¶on general del sistema homog¶eneo
basta con encontrar Y (t) por el m¶etodo descrito.
Ahora bien, si se trata de un (o con mayor raz¶on m¶ultiples) problema de valores
iniciales:
~y 0 = A~y ~y(t0) = ~y0
² Si conocemos una matriz fundamental cualquiera X(t), por ejemplo la constru¶³-da anteriormente, la soluci¶on general ser¶a:
~y(t) = X(t):~c = c1~x1(t) + : : :+ cn~xn(t)
y, por tanto, para encontrar aquella que veri¯que la condici¶on ~y(t0) = ~y0 debe-
mos resolver el sistema de ecuaciones
~y0 = c1~x1(t0) + : : :+ cn~xn(t0)
² Pero si conocemos la matriz eAtcomo (eAt)t=0 = I, la matriz Z(t) = eA(t¡t0) veri¯ca Z(t0) = I y tambi¶en es
una matriz fundamental.
Entonces la soluci¶on buscada ser¶a de la forma ~y(t) = eA(t¡t0)~c y como debeveri¯car ~y(t0) = ~y0 entonces ~y(t0) = I~c = ~c con lo que la soluci¶on buscada es
~y(t) = eA(t¡t0)~y0
Desde luego, en estos casos, es mejor conocer la matriz exponencial.
3. Adem¶as, en el m¶etodo de variaci¶on de los par¶ametros para el sistema no ho-
mog¶eneo estudiado en el apartado 5.4.3 llegamos a que la soluci¶on de
~y 0 = A~y +~b(t) ~y(t0) = ~y0
era
~y(t) = Y (t)Y ¡1(t0)~y0 + Y (t)Z t
t0Y ¡1(s)~b(s) ds
74

donde Y (t) era una matriz fundamental. Ahora, si elegimos como matriz fun-
damental a Y (t) = eAt, tenemos [Y (t)]¡1 = e¡At y la f¶ormula se nos convierteen
~y(t) = eAte¡At0~y0 + eAtZ t
t0e¡As~b(s) ds =
= eA(t¡t0)~y0 +Z t
t0eA(t¡s)~b(s) ds
mucho m¶as sencilla a la hora de efect¶uar los c¶alculos.
Obtenci¶on de soluciones reales
5.5.7 Proposici¶on.- Dado el sistema
~y 0 = A~y
dondeA es una matriz real de orden n, supongamos que ~y(t) es una soluci¶on compleja
de dicho sistema. Entonces, si ~y(t) = ~y1(t) + i ~y2(t) con ~y1 ; ~y2 reales, se veri¯ca
que ~y1(t) e ~y2(t) tambi¶en son soluciones del sistema. A dichas funciones vectoriales,
las llamaremos parte real e imaginaria de ~y(t).
En efecto,
~y10(t) + i ~y2 0(t) = ~y 0(t) = A(~y1(t) + i ~y2(t)) = A~y1(t) + i A~y2(t)
Igualando la parte real y la parte imaginaria, deducimos el resultado.
Sea A es una matriz de coe¯cientes reales y de orden n; sabemos que su poli-
nomio caracter¶³stico tiene n ra¶³ces complejas, y que si ¸ = a+ i b es un valor propio
complejo, su conjugado tambi¶en ser¶a un valor propio.
Adem¶as, si ~v = ~v1 + i ~v2 es un vector propio generalizado asociado a ¸, con ~v1; ~v2vectores reales, entonces el vector ~v1¡ i ~v2, que llamaremos conjugado de ~v, y deno-taremos ~vc, tambi¶en es un vector propio generalizado asociado a ¹:
En efecto, supongamos que para un cierto k
(A¡ ¸I)k ~v = ~0
Teniendo en cuenta las propiedades de la conjugaci¶on
(A¡ ¸I)k ~vc = ~0 (A¡ ¹I)k ~vc = ~0
Entonces, las soluciones que se construyen a partir de los vectores propios generali-
zados ser¶an:
~y1 = e¸t[~v + t(A¡ ¸I)~v + : : :+ tk¡1
(k ¡ 1)!(A¡ ¸I)k¡1~v]
75

~y2 = e¹t[~vc + t(A¡ ¹I)~vc + : : :+ tk¡1
(k ¡ 1)!(A¡¹I)k¡1~vc]
siendo esta ¶ultima conjugada de la anterior. Por tanto, la parte real y la parte
imaginaria de la primera son dos soluciones reales del sistema. Son linealmente
independientes ya que corresponden a(~y1 + ~y2)
2;(~y1 ¡ ~y2)2i
. (Recordemos que ~y1 e
~y2 eran linealmente independientes.)
Resumiendo, de las n soluciones complejas del sistema
~y 0 = A~y
obtenemos n soluciones reales linealmente independientes.
76

5.6 Ejercicios
1. Calcular la soluci¶on general del sistema:Ãx0(t)y0(t)
!=
Ãa11(t) a12(t)
a21(t) a22(t)
!Ãx(t)
y(t)
!+
Ãt
0
!
sabiendo que las funciones
Á1(t) =
Ã1
0
!; Á2(t) =
Ãt
1
!
son soluciones particulares del sistema homog¶eneo.
>Pueden determinarse los coe¯cientes aij(t) expl¶³citamente?
2. Resolver los sistemas siguientes:
(a) 8>><>>:x0 = 3xy0 = 2x+ 3yz0 = x+ y + 3z
(b) (x0 = x+ yy0 = x+ y + t
(c) ~y 0(t) = A~y(t), donde A es la matriz:0BB@1 0 0
0 1 ¡10 1 1
1CCAcon la condici¶on inicial ~y(0) = (1; 1; 1)t.
3. Resolver, utilizando la transformada de Laplace, los sistemas diferenciales siguien-
tes:
(a)
2x00 + y0 ¡ 2x¡ y = ¡ cos t¡ sen t
2y00 ¡ 2x0 + y ¡ 2x = 3 cos t+ 4 sen tcon las condiciones iniciales x(0) = 4, x0(0) = 3
2, y(0) = 6, y0(0) = 5.
77

(b) El sistema de ecuaciones diferenciales
m1x001 = ¡K1(x1 ¡ l1) +K2(x2 ¡ x1 ¡ l2)
m2x002 = ¡K2(x2 ¡ x1 ¡ l2) +K1(l1 + l2 ¡ x2)
)rige el comportamiento de los sistemas de masas en ausencia de fuerzas exterio-
res. Considerando que las masas m1 y m2 valen 1 Kg., las constantes el¶asticas
K1 = 4N=m y K2 =52N=m y las longitudes l1 = 2m: y l2 = 3m:, calcular
la posici¶on de las masas x1(t), x2(t), para t > 0, sabiendo que en el instante
inicial las masas estaban en reposo en los puntos x1(0) = 2 y x2(0) = 4.
4. Demostrar que si ~Y (t) es una soluci¶on del sistema ~Y 0(t) = A~Y (t), entonces ~Y 0(t)es tambi¶en una soluci¶on, e igualmente las sucesivas derivadas del vector ~Y (t).
De un sistema ~Y 0(t) = A~Y (t), se sabe que dos soluciones son de la forma
Á1(t) =
0BB@t2
2t
2
1CCA ; Á2(t) =0BB@e®t
0
0
1CCA(a) Hallar el valor de ® para que sean soluciones del sistema ~Y 0(t) = A~Y (t).
(b) Hallar para dicho ®, la matriz A.
5. Si Á(t) es la matriz fundamental de un sistema de ecuaciones diferenciales ordi-
narias de primer orden, lineal y homog¶eneo y K es una matriz cualquiera, de la
misma dimensi¶on que la matriz del sistema y no singular, demostrar que Á(t)K
es otra matriz fundamental.
>Y KÁ(t) es tambi¶en matriz fundamental?.
6. Resolver el sistema:8>>>>><>>>>>:
d2x
dt2+ 3
dy
dt+ 3y = 0
d2x
dt2+ 3y = te¡t
x(0) = 0 x0(0) = 2
7. Resolver los sistemas ~y 0(t) = A~y(t) , donde A es la matriz:
a) A =
0BB@1 ¡2 2
¡2 1 2
2 2 1
1CCA b) A =
0BBBB@2 ¡1 0 0
¡1 2 0 0
1 1 2 1
1 ¡1 1 2
1CCCCA8. Resolver el sistema
~y 0 =
0BB@1 0 0
2 1 ¡23 2 1
1CCA ~y +
0BB@1
0
0
1CCA ect c6= 1
78