sistemas no lineales de ecuaciones diferenciales (en ingles)

of 30
Upload
anthony-gutierrezCategory
view
249download
07/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
1/30
ECUACIONES DIFERENCIALES LINEALES
DE SEGUNDO ORDENYOEL GUTIRREZ
UNEXPO-PUERTO ORDAZ
1 Introduccin
En la ingeniera se desarrollan modelos que producen ED lineales de segundo orden.
Algunos ejemplos de estos modelos son las vibraciones mecnicas.Consideremos un resorte que resiste compresin y estiramiento, sujeto a un soporte
rgido. Un cuerpo de masa m se sujeta en el otro extremo del resorte y lo estira unalingituds, llegando a una posicin de equilibrio (ver Figura 1)
Soporte rgido
Resortesinestirar
m
m
Posicin deequilibrio x
Figura 1: Sistema resorte-masa
Denotemos con x la distancia del cuerpo a su posicin de equilibrio. Tomamosx >0 cuando el resorte est por debajo de la posicin de equilibrio y x
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
2/30
que gobierne el movimiento del cuerpo, tomando en cuenta las fuerzas que actan sobrel debido a la elasticidad del resorte, el peso del cuerpo, la friccin (amortiguamiento)y las posibles fuerzas externas.
Al desplazar la masa m con respecto de la posicin de equilibrio, el resorte seestira o se comprime y ejerce una fuerza que reiste al desplazamiento. Para la mayor
parte de los resortes, esta fuerza es directamente proporcional a la distancia que elresorte ha sido alargado o comprimido, por lo que est dada por
Fr = k (s+x) ; (1)donde la constante positiva k es la rigidez del resorte y el signo negativo indica lanaturaleza de oposicin de la fuerza. La ecuacin (1), conocida como la ley deHooke, slo es vlida para desplazamientos sucientemente pequeos.
El peso del cuerpoW =mg
est equilibrado por Fr:En la posicin de equilibrio
mg ks = 0 (2)Prcticamente todos los sistemas mecnicos experimentan la fuerza de friccin;
por lo general, para el movimiento de vibracin, esta fuerza se modela mediante untrmino proporcional a la velocidad:
Ff= bdxdt
; (3)
donde b 0es el coeciente de amortiguamiento, y el signo negativo tiene el mismosignicado que en la ecuacin (1).
Las otras fuerzas que actan sobre el oscilador se consideran por lo general comoexternas al sistema. Aunque estas pueden ser gravitacionales, elctricas o magnticas,lo comn es que las fuerzas externas ms importantes sean transmitidas a la masasacudiendo la base de la que cuelga el resorte. Representaremos todas las fuerzasexternas por una funcin conocidaFe(t):
Si no hay otras fuerzas de retardo que acten sobre el sistema, entonces la fuerzaneta o resultante es
Fn= Fr+W+Ff+Fe(t)
Aplicando la segunda Ley de Newton obtenemos
md2x
dt2 =
k(s+x) +mg
b
dx
dt +Fe(t)
= ks kx+mg bdxdt
+Fe(t)
Comomg ks = 0;m
d2x
dt2 = kx bdx
dt +Fe(t)
2
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
3/30
As, la EDO para el sistema mecnico masa-resorte es
md2x
dt2 +b
dx
dt +kx = Fe(t): (4)
Nuestro objetivo es obtener una descripcin cualitativa de las soluciones de la EDOde la forma (4), llamada ED lineal de segundo orden con coecientes constantes.
Para comenzar el estudio de estas ecuaciones diferenciales necesitamos ciertasdeniciones y terminologas comnes.
Denicin 1.1 Una ecuacin diferencial ordinaria es lineal de segundo ordensi se puede escribir de la forma
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= f(x); (5)
o ms brevemente
a2(x)y00
+a1(x)y0
+a0(x)y = f(x);
dondea2; a1; a0 yfdependen slo dex y no dey: Cuando a2; a1; a0 son constantes,diremos que la ecuacin (5) tiene coecientes constantes,en caso contrario, tienecoecientes variables.
Modelaremos problemas mediantes un PVI de segundo orden que involucra unED lineal, estos PVI son de la forma
a2(x)y00
+a1(x)y0
+a0(x)y= f(x); y(x0) =y0; y0(x0) =y1: (6)
Recurdese que, para un problema como ste, se busca una funcin denida enalgn intervaloIque contenga a x0, y satisfaga la ecuacin diferencial y las 2 condi-ciones iniciales especicadas en x0: y(x0) =y0; y0(x0) =y1.
Existe un teorema de existencia y unicidad para el PVI anteior, similar al corre-spondiente teorema para el PVI que involucra una ED lineal de primer orden.
Teorema 1.1 (Teorema de existencia y unicidad) Seana2(x); a1(x); a0(x)yf(x)funciones continuas en un intervaloI, y seaa2(x) 6= 0 para cadax del intervalo. Six0 es cualquier punto enI y siy0; y1; son nmeros arbitrarios, el PVI (6) tiene unay slo una soluciny(x) en el intervalo I.
La cuestin de existencia de una solucin no constituye en realidad un problema.Sin embargo, es muy importante saber que la solucin es nica.
3
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
4/30
2 Ecuaciones lineales homogneas: Caso general
Denicin 2.1 Una ecuacin lineal de segundo orden de la forma
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= 0 (7)
se llama homognea, mientras que una ecuacin
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= f(x) (8)
dondef(x) nos es idnticamente cero, se llamano homognea.
Al estudiar la ecuacin no homognea (8), es necesario considerar a la par laecuacin homognea (7). Bajo estas condiciones se habla de (8) como una ecuacincompleta y de (7) como la ecuacin reducida asociada a ella.
En el siguiente teorema veremos que la suma o superposicin de dos soluciones deuna ecuacin diferencial lineal homognea de segundo orden tambin es una solucin.
Teorema 2.1 (Principio se superposicin, ecuaciones homogneas) Siy1; y2 son 2 soluciones de la ED lineal homognea (7) de orden 2 en un intervaloI, la combinacin lineal
y(x) =c1y1(x) +c2y2(x)
en dondec1; c2 son constantes arbitrarias, tambin es una solucin cuando x est enI.Prueba. Comoy1; y2 son2 soluciones de la ED lineal homognea (7) enI ; entonces
a2(x)d2y1dx2
+a1(x)dy1dx
+a0(x)y1 = 0
y
a2(x)d2y2dx2
+a1(x)dy2dx
+a0(x)y2 = 0
enI: Por lo tanto, sic1; c2 son constantes arbitrarias y
y= c1y1+c2y2;
entonces
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y
= a2(x)d2
dx2(c1y1+c2y2) +a1(x)
d
dx(c1y1+c2y2) +a0(x) (c1y1+c2y2)
= c1
a2(x) d2y1
dx2 +a1(x)dy
1
dx +a0(x)y1
+c2
a2(x)d
2y2dx2
+a1(x)dy2
dx +a0(x)y2
= c1:0 +c2:0
= 0
enI; y el teorema queda demostrado.
4
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
5/30
Ntese que:
1. Un mltiplo constante y(x) =c1y1(x)de una solucin y1(x) de una ED linealhomognea tambin es una solucin.
2. Una ED lineal homognea siempre tiene la solucin trivial y(x) = 0.Sabemos que la solucin general de una ED lineal homognea de segundo orden
es biparamtrica (tiene dos parmetros). Ahora, por el principio de superposicin, siy1; y2son2 soluciones de la ED lineal homognea (7) en un intervalo I, entonces
y(x) =c1y1(x) +c2y2(x) (9)
en donde c1; c2 son constantes arbitrarias, tambin es una solucin en I. Entoncesnos preguntamos, es la ecuacin (9) la solucin general de la ED lineal homognea(7) en I?, esto es, toda solucin de la ecuacin homognea (7) se puede escribir de
la forma (9), para una eleccin adecuada de las constantes c1; c2?Para dar respuesta a esta pregunta ntese que:
1. Si y2(x)es la solucin idnticamente nula en I, entoces
c1y1(x) +c2y2(x) =c1y1(x)
tiene en realidad una sola constante y no puede esperarse que sea la solucingeneral de la EDO (7) en I :
2. Si y2(x)es un mltiplo constante de y1(x)en I;digamos y2(x) =ky1(x)enI;entonces de nuevo
c1y1(x) +c2y2(x) =c1y1(x) +ky1(x) = (c1+k)y1(x) =Cy1(x)
tiene en realidad una sola constante.
Luego, una de las condiciones que necesitamos es la independencia lineal.
Denicin 2.2 Dos funcionesf1(x)yf2(x)se dice que sonlinealmente dependi-entes(l.d.) en un intervalo Isi existen dos constantesc1; c2 no todas cero, tales quepara todax enI
c1f1(x) +c2f2(x) = 0: (10)
En caso contrario se dice que el conjunto es linealmente independiente (l.i.).
En otras palabras, dos funciones son l.i. en un intervalo si las nicas constantespara las que se cumple (10) para toda x en el intervalo son c1= c2= 0:
5
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
6/30
Ntese que si las dos funciones f1(x) y f2(x) son l.d. en un intervalo, existenconstantes,c1yc1, que no son cero a la vez, tales que, para toda x en el intervalo secumple (10); por consiguiente, si suponemos que c16= 0, entonces
f1(x) =
c2
c1
f2(x);
esto es, si dos funciones son l.d., entonces una es mltiplo constante de laotra. Al revs, si f1(x) =c2f2(x)para alguna constante c2, entonces
(1)f1(x) +c2f2(x) = 0
para toda xen algn intervalo. As, las funciones son l.d. porque al menos unas delas constantes no es cero. Llegamos a la conclusin de que dos funciones son l.i.en un intervalo I cuando ninguna es mltiplo constante de la otra en I.Esto es, el cociente f1(x)
f2(x)no es constante en un intervalo en que f1(x)y f2(x)son l.i..
Para estudiar la dependencia lineal de 2soluciones particulares de una ED linealhomognea podemos recurrir a un determinante, como se muestra en el siguienteteorema
Teorema 2.2 Seany1; y2;2soluciones de la ecuacin diferencial homognea de orden2 (7) , dondea2; a1 ya0 son continuas en algn intervalo dado I yan(x)6= 0 paratodax enI.
1. y1; y2; son linealmente dependientes enIsi y slo si el Wronskiano dey1 ey2dado por
W(y1; y2) =
y1 y2y01
y02
es idnticamente nulo en el intervalo.
2. y1; y2; son linealmente independientes enIsi y slo siW(y1; y2) 6= 0 para cadax enI.
3. W(y1; y2) = 0 para cadax 2 I, o bien, W(y1; y2) 6= 0 para cadax 2 I.
Cualquier conjunto y1; y2 de dos soluciones l.i. de la ED lineal homognea (7)de segundo orden en un intervalo Ise dice que es un conjunto fundamental desolucionesen el intervalo.
Semejante al hecho de que cualquier vector en dos dimensiones puede expre-sarse como una combinacin lineal de los vectores linealmente independientes i y
j;Cualquier solucin de una ED lineal homegnea de segundo orden en un intervaloIpuede expresarse como una combinacin lineal de dos soluciones l.i en I :
6
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
7/30
Teorema 2.3 (Solucin general, ecuaciones homogneas) Siy1; y2; son2solu-ciones linealmente independientes de la ecuacin homognea de orden2 (7), en unintervaloI, entonces
y= c1y1+c2y2 (11)
es una solucin de (7) para cualesquiera constantesc1; c2. Recprocamente, toda solu-cin de (7) tiene la forma (11) para selecciones apropiadas de las constantesc1; c2.
Prueba. Sean y1; y2; 2soluciones linealmente independientes de la EDO lineal ho-mognea
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= 0
en un intervalo I ;por el principio de superposicin es inmediato que
y= c1y1+c2y2
tambin es una solucin enIpara cualesquiera constantesc1; c2.
Sea(x)una solucin de la EDO lineal homognea en I ;sea x = t un punto en Iy consideremos el sistema de ecuaciones
c1y1(t) +c2y2(t) =(t)
c1y0
1(t) +c2y0
2(t) =0
(t): (12)
Comoy1; y2; son soluciones linealmente independientes de la ED lineal homogneade segundo orden en I, entonces W(y1; y2)6= 0para cada x2I, por lo tanto, comot 2 I
y1(t) y2(t)y
0
1(t) y0
2(t)
6= 0:
Esto garantiza que el sistema (12) tiene solucin nica, esto es, podemos determinarc1 y c2 de manera nica. Luego, toda solucin de (7) se puede escribir de la forma(11) para selecciones apropiadas de las constantes c1; c2.
3 Ecuaciones lineales homogneas con
coecientes constantes
Estudiaremos con detalle las soluciones de la ED lineal homognea
ay00+by0+cy = 0 (13)
en el caso especial en que a,b y c son constantes reales.Nuestro punto de partida es la propiedad de la funcin exponencialemx de que sus
derivadas son todas mltiplos de la propia funcin, lo que nos conduce a considerar
y= emx
7
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
8/30
como una posible solucin de (13) si la constante mse escoge adecuadamente. Comoy0 = memx e y 00= m2emx, sustituyendo en (13) vemos que
(am2 +bm+c)emx = 0; (14)
y puesto que emx
nunca se anula, (14) se cumple si y slo m satisface la ecuacinam2 +bm+c= 0; (15)
llamadaecuacin auxiliaroecuacin caractersticade la EDO (13). Examinare-mos tres casos: Las soluciones de la ecuacin caracterstica que corresponden a racesreales distintas, races reales e iguales y races complejas conjugadas.
3.0.1 Caso 1: Races reales distintas.
Si la ecuacin (15) tiene dos races reales distintas,m1y m2, llegamos a las solucionesy1 = e
m1x yy2 = em2x. Estas funciones son linealmente independientes en (1
;1
),en efecto, como m26=m1
W(y1; y2) =
em1x em2x
m1em1x m2e
m2x
= (m2 m1) e(m1+m2)x
es no nulo para cadax 2 (1;1);en consecuencia, la solucin general de la ecuacin(13) en ese intervalo es
y= c1em1x +c2e
m2x:
3.0.2 Caso 2: Races reales e iguales.
Si la ecuacin (15) tiene un nica raz real, entoncesb24ac= 0y la raz esm= b2a :en este caso
y1 = emx =e
b
2ax
es una solucin de la ED lineal homognea (13) en(1;1). Se demuestra que
y2 = xemx =xe
b
2ax
es una segunda solucin de la ecuacin (13) en (1;1), en efecto, sustituyendoy2;y
0
2 yy00
2 en (13) obtenemos que
8
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
9/30
ay002 + by02+cy2 = a
b
a+
b2
4a2x
e
b
2ax +b
1 b
2ax
e
b
2ax +c
xe
b
2ax
= b+ b2
4ax+b
b2
2ax+cx e b2ax
=
b2 2b2 + 4ac
4a
xe
b
2ax
= b2 4ac
4a xe
b
2ax
= 04a
xe b
2ax
= 0:
Por otra parte, como
w(y1; y2)(x) =
e
b
2ax xe
b
2ax
b2a
e b
2ax
1 b2ax
e b
2ax
=
1 b
2ax
e
b
ax +
bx
2ae
b
ax
= eb
ax
no se anula en (1;1), las dos soluciones, y1 y y2 son l.i en en (1;1):Por lotanto (15) tiene a
y= c1emx +c2xe
mx = (c1+c2x) emx:
como su solucin general en (1;1).
3.0.3 Caso 3: Races complejas conjugadas.
Si la ecuacin (15) tiene dos races complejas conjungadas, digamos m1 =+iym2= i, donde y son nmeros reales; entonces,
y= c1e(+i)x +c2e
(i)x; (16)
es solucin de la ecuacin (13) para cada eleccin de las constantes c1 y c2: Sinembargo, en la prctica se preere trabajar con funciones reales y no con exponenciales
complejas. Con este objeto se usa la frmula de Euler:
ei = cos +isen;
en que es un nmero real.
9
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
10/30
Como (16) es una solucin de (13) para cualquier eleccin de las constantes c1 yc2, sic1= c2= 1, obtenemos la solucin
y1= e(+i)x +e(i)x =ex(eix +eix) = 2ex cos(x);
y sic1 = 1y c2=
1, obtenemos la solucin
y2 = e(+i)x e(i)x =ex(eix eix) = 2iexsen(x):
En consecuencia, por el principio de superposicin para las ecuaciones homogneas
1
2y1= e
x cos(x) y 1
2iy2 = e
xsen(x)
tambin son soluciones de la ecuacin (13). Adems, se demuestra que esas solucionesson linealmente independientes en (1;1); por tanto, la solucin general de laecuacin (13) en(1;1)es
y= (c1cos(x) +c2sen(x))ex
:Teorema 3.1 (Existencia y unicidad: Caso homogneo) Para cualesquieranmeros realesa2;,a1;,a0; x0; y0; y1; cona26= 0; existe una nica solucin del PVI
a2y00
+a1y0
+a0y= 0; y(x0) =y0; y0(x0) =y1;
vlida para todax en(1;1):
Ejercicios 1
1. Verique que la ecuacin
md2xdt2
+kx = 0
tiene una solucin de la formax(t) =sen!t;donde! =q
km
:
2. Para la ecuacin
md2x
dt2 +b
dx
dt +kx = 0;
verique lo siguiente:
(a) Six(t)es una solucin, tambin lo es cx(t), para cualquier constante c,
(b) six1(t)y x2(t)son soluciones, tambin lo es su suma.3. Verique que x(t) = 3sen3t + cos 3tes una solucin del PVI
2x00
+ 18x= 0; x(0) = 1; x0(0) = 6:
Determine el mximo dejx(t)j para -1 < t < 1:
10
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
11/30
4. Determinar si las funciones f(x) y g(x) son linealmente independientes en elintervalo(0; 1):
(a) f(t) =etsen2t y g(t) =et cos2t
(b) f(t) = tan2 t
sec2 t y g(t) = 3
(c) f(t) = 0 y g(t) =et
(d) f(t) =x y g(t) =x2
5. Seanf(t) =t3 y g(t) = jt3j :
(a) Sonf(t) y g(t) linealmente independientes en los siguientes intervalos?i)(0;1); ii) (1; 0); iii) (1;1)
(b) Calcules el wronskiano de esta dos funciones en (1;1)
6. Hallar una solucin general de cada ecuacin(a) x
00
+x0 x= 0
(b) 2w00
+ 7w0 4w= 0
(c) x00 x0 11x= 0
(d) 4y00
+ 20y0
+ 125y= 0
(e) y00
+y = 0
(f) y00 10y0 + 26y= 0
(g) y00
4y
0
+ 7y= 0
(h) y00 + 4y0 + 8y= 0
7. Resuelva cada PVI
(a) y+y0
= 0; y(0) = 2; y0
(0) = 1
(b) y00 4y0 + 3y= 0; y(0) = 1; y0(0) = 13
(c) y00 6y0 + 9y= 0; y(0) = 2; y0(0) = 253
(d) y00
+ 2y0
+ 17y= 0; y(0) = 1; y0
(0) = 1(e) y
00
+ 9y= 0; y(0) = 1; y0
(0) = 1
11
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
12/30
4 Ecuaciones lineales no homogneas
El siguiente teorema ser de mucha utilidad cuando consideremos los mtodos paraencontrar soluciones particulares de EDO lineales no homogneas con coecientesconstantes.
Teorema 4.1 (Principio de superposicin, ecuaciones no homogneas) Siypirepresenta una solucin particular de ED lineal no homognea
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= fi(x);
en dondei= 1; 2; : : : ; k. Entonces
yp= c1yp1+c2yp2+: : :+ckypk
es una solucin particular de
a2(x)d2y
dx2+a1(x)
dy
dx+ a0(x)y= c1f1(x) +c2f2(x) +: : :+cfk(x);
para cualquier eleccin de las constantesc1; c2;:::;ck:
Qu forma tiene las soluciones generales de las ED lineales no homogneas? Larespuesta a esta pregunta la mostramos a continuacin.
Teorema 4.2 (Solucin general, ecuaciones no homogneas) Siy1; y2son2solu-ciones linealmente independientes de la ecuacin
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= 0 (17)
yyp es una solucin particular de
a2(x)d2y
dx2+a1(x)
dy
dx+a0(x)y= f(x) (18)
dondefes continua enI, entonces
y= c1y1+c2y2+yp (19)
es una solucin de (18) para cualesquieras constantes c1; c2. Recprocamente, todasolucin de (18) tiene la forma (19) para selecciones apropiadas de las constantesc1; c2.
12
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
13/30
Usulamente, la solucin general de la homognea asociada c1y1+c2y2 se denotaporycy se llamasolucin complementaria. As, la solucin general de la ecuacinno homognea (18), en un intervaloIes de la forma
y= yc+yp
Para encontrar la solucin general de la ecuacin diferencial lineal no homognea(18), debemos pasar por dos momentos
1. Determinar la solucin general de la ecuacin homognea asociada, yc.
2. Establecer cualquier solucin particular, yp, de la ecuacin no homognea.
Entonces, la solucin general de (18) en un intervalo es y = yc+yp.Estudiaremos las ecuaciones lineales en donde los coecientes de la homognea
asociada son constantes, en este caso no existir problema alguno para hallar yc:Pero, en tales circunstancias, cmo hallar yp? Existen muchos mtodos por medio
de los cuales se pueden obtener soluciones particulares, a continuacin nos referiremosa dos de ellos.
4.1 El mtodo de los coecientes indeterminados
Un mtodo a menudo usado en Fsica e Ingeniera es el mtodo de los coecientesindeterminados. La idea bsica es una conjetura o propuesta coherente acerca de laforma deyporiginada por los tipos de funciones que forman el dato g(x). El mtodoes bsicamente directo, pero est limitado a ecuaciones lineales no homogneas, comola ecuacin (18), en que:
1. Los coecientes a0; a1; a2 son constantes.
2. f(x) es una funcin polinomial, una funcin exponencial erx donde r es con-stante, una funcin seno o coseno como senrx, cos rx, o sumas y productosnitos de estas funciones.
A continuacin mostramos la forma de yporiginada por algunos tipos de funcionesque forman el datof(x):
1. Para un polinomio de grado n, asuma un polinomio de grado n.
2. Para trminos como senrxo cos rx, asumaAsenrx+B cos rx.3. Para trminos como erx, asumaAerx.
4. Para un producto nito de trminos como los anteriores, asuma una combi-nacin lineal de todas las funciones linealmente independientes generadas pordiferenciaciones repetidas def(x)
13
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
14/30
5. Para una suma o diferencia nita de trmininos como los anteriores, aplique elprincipio de superposicin.
Si algunos de los trminos asumidos ocurre en la solucin complementaria, debe-mos multiplicar estos trminos asumidos por una potencia de la forma xn;connel
entero positivo ms pequeo, de modo que ninguno de los trminos asumidos aparezcaen la solucin complementaria.
4.2 El mtodo de variacin de parmetros
Consideremos la ED lineal no homonea
a2(x)y00+a1(x)y
0+a0(x)y= f(x): (20)
El mtodo de los coecientes indeterminados, para hallar una solucin particular de laecuacin (20) tiene dos serias limitaciones: puede usarse slo cuando los coecientes
a2,a1y a0son constantes, e incluso entonces slo funciona si el trmino de la derechaf(x) tiene una forma particularmente sencilla. Dentro de estas limitaciones, esemtodo suele ser el ms simple de aplicar.
Ahora desarrollaremos otro mtodo ms potente que funciona siempre, sean cualesseana2,a1y a0yf(x), y supuesto slo que la solucin general de la correspondienteecuacin homognea
a2(x)y00+a1(x)y
0+a0(x)y = 0; (21)
se conoce de antemano.La ED (20) se puede escribir de la forma
y00+P(x)y0+Q(x)y= g(x); (22)donde P(x) = a1(x)
a2(x); Q(x) = a0(x)
a2(x) y g(x) = f(x)
a2(x)Supongamos que P(x); Q(x) g(x)
son continuas en algn intervaloI ;y que se ha encontrado de algn modo la solucingeneral
y= c1y1(x) +c2y2(x)
de la homognea asociada.El mtodo de variacin de parmetros permite encontrar dos funciones descono-
cidas, v1(x)y v2(x);de manera tal que
yp= v1y1+v2y2 (23)
sea una solucin particular de (22). Para encontrar estas dos funciones desconocidas,empecemos calculando la derivada de (23), agrupada como sigue:
y0p= (v1y01+v2y
02) + (v
01y1+v
02y2): (24)
14
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
15/30
Otra derivacin introducira segundas derivadas de las incgnitas v1 y v2. Evitamosesa complicacin exigiendo que
v01y1+v02y2= 0: (25)
Esto da y0p= v1y01+v2y
02: (26)
As quey00p =v1y
001+v
01y01+v2y
002 +v
02y02: (27)
Sustituyendo (23), (26) y (27) en (22) y reordenando se llega a
v1(y001 +P(x)y
01+Q(x)y1) +v2(y
002 +P(x)y
02+Q(x)y2) +v
01y01+v
02y02 = g(x):
Como y1 e y2 son soluciones de la homognea asociada a la ecuacin (22) , las dosexpresiones entre parntesis son cero, y se obtiene
v01y01+v
02y02 = g(x): (28)
Teniendo en cuenta (25) y (28) conjuntamente tenemos dos ecuaciones con dos in-cgnitas v 01y v
02
v01y1 + v02y2 = 0
v01y01 + v
02y02 = g(x);
cuya solucin es
v01 = y2g(x)
W(y1; y2) y v02=
y1g(x)
W(y1; y2): (29)
Hay que hacer notar que estas frmulas son legtimas, ya que el Wronskiano de losdenominadores es no nulos por la independencia lineal de y1 y y2. Integrando cadaecuacin en (29) obtenemos.
v1 = Z
y2g(x)
W(y1; y2)dx y v2=
Z y1g(x)
W(y1; y2)dx:
Resumiendo toda la informacin podemos armar que
yp= y1
Z
y2g(x)
W(y1; y2)dx
+y2
Z y1g(x)
W(y1; y2)dx
es la solucin particular de (20) que buscbamos.
15
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
16/30
Ejercicios 2
1. Hallar una solucin general para cada ED lineal, aplicando el mtodo de loscoecientes indeterminados
(a) y00
+y0
6y= e4x
(b) y00
+y0 6y= e2x
(c) y00
+y0 6y= 5te2t;
Sol : y = c1e2t +c2e
3t +12
t2 15
t
e2t
(d) 2y00
+y0
= 1 + 2e 12x;Sol : y = c1+c2e
12x + 2x2 9x 2xe 12x
(e) y00
+ 3y= 12sen(p
3x);
Sol : y = c1cos(p
3x) +c2sen(p
3x) 14p3
t cos(p
3x)
(f) y00
4y0
+ 13y = 3 cos(3x)(g) 2y
00
+y0 6y= senx + 3e2x;
Sol : y = c1e2x +c2e
3
2x 8
65senx 165cos x 37xe2x(h) y
00
+ 9y= 2sen(3x) +senx;
Sol : y = c1cos(3x) +c2sen(3x) 13x cos(3x) + 12senx(i) y
00 2y0 = 12x 10(j) y
00 2y0 + 5y= exsenx(k) y
00
+y0
+y = xsenx
(l) y00
+ 4y= 4sen(2x);Sol : y = c1cos(2x) +c2sen(2x) x cos(2x)
(m) y00
+y0 12y= 2x+e3x;
Sol : c1e3xc2e
4x 16x 172 + 17xe3x
2. Hallar la solucin general de la homognea asociada y determine la forma, apli-cando el mtodo de los coecientes indeterminados, de una solucin particularde cada ecuacin. (No evale los coecientes)
(a) 2y00
+ 3y0
= 3 +e3
2t
(b) y00
+ 9y= 4t3sen(3t)
(c) y00
+y0 6y= 5te2t
(d) y00
+ 2y0
+ 2y= 8t2etsent
16
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
17/30
3. Resuelva por el mtodo de variacin de parmetros el PVI
y00 4y0+ 4y= 12x2 6x e2x; y(0) = 1; y0(0) = 0:Sol: (x4 x2 2x+ 1) e2x
4. Hallar una solucin general de cada ED lineal aplicando el mtodo de variacinde parmetros
(a) y00+ 4y0+ 4y= e2x ln xSol : y =
c1+c2x+x
212ln x 3
4
e2x
(b) 4y00+ 4y0+y = x2ex
2
Sol : y =
c1+c2x 14(1 + ln x)
e1
2x
(c)3y0+ 2y= (1 +ex)1(d) y00+ 2y0+y = (ex 1)2
Sol : y = (c1+c2x ln(1 ex)) ex(e) y00+ 2y0+y = (ex + 1)2
Sol : y = (c1+c2x+ ln (1 +ex)) ex
5 Vibraciones mecnicas
Regresaremos al sistema masa-resorte descrito en la introduccin de este tema yanalizaremos su movimiento con ms detalle. La ecuacin que lo describe es
m
d2x
dt2 +b
dx
dt +kx = Fe(t); (30)donde m >0 es la masa del cuerpo sujeta en uno de los extremos del resorte, b 0es la constante de amortiguaiento, k >0 es la rigidez del resorte y Fe(t)es la fuerzaexterna que acta sobre el sistema.
5.1 Movimiento libre no amortiguado
Primero nos centraremos en un caso sencillo, cuando b = 0y Fe(t) = 0; llamado elmovimiento libre sin amortiguamiento. Entonces la ecuacin (30) se reduce a
md2x
dt2 +kx = 0:
Dividiendo por m y haciendo ! =q
km
, la ecuacin anterior se puede escribir como
d2x
dt2 +!2x= 0 (31)
17
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
18/30
Esta ecuacin describe el movimiento libre no amortiguado de un cuerpo. La ecuacinauxiliar de (31) es r2 +!2 = 0; que tiene races complejas conjugadas!i: Por lotanto, su solucin general es
x(t) =c1cos(!t) +c2sen(!t) (32)
Dos condiciones iniciales asociadas con la ecuacin (31) son x(0) =a, la cantidadde desplazamiento inicial, y x
0
(0) = b;la velocidad inicial del cuerpo. Por ejemplo,sia >0 y b >>>>>>>>>>>>>>>>>>>:
arctagc1c2
; si C1> 0 y C2 > 0
+arctag c1c2 ; si C2< 02+arctag
c1c2
; si C1< 0 y C2 > 0
0; si C1= 0 y C2> 0; si C1 = 0 y C2 > 02 ; si C1 > 0 y C2= 032; si C1< 0 y C2= 0
18
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
19/30
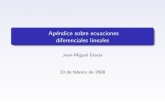
Es evidente de (33) que el movimiento de una masa en un sistema libre de amor-tiguamiento es un onda sinusoidal, o lo que se llama un movimiento armnicosimple (ver Figura 2). La constante C es la amplitud del movimiento y ; quevara de 0 a2;es elngulo fase. El movimiento es peridico con periodoT = 2
!;
y frecuencia natural !2
:El periodo se mide en unidades de tiempo y la frecuencia
natural en periodos (o ciclos) por unidades de tiempo. La constante ! es la fre-cuencia circular o angularpara la funcin seno en (33) y se mide en radianes porunidad de tiempo.
- /
C
2 / - /
Periodo
2 /
t
x
Figura 2: Movimiento libre y no amortiguado
Ntese que la amplitud y el ngulo fase dependen de las constantes C1y C2;quea su vez quedan determinadas por la posicin y velocidad inicial de la masa. Sinembargo, el periodo y la frecuencia dependen slo de k y my no de las condiciones
iniciales.Las unidades con las cuales trabajaremos en los problemas que involucran vibra-ciones mecnicas se resumen en la siguiente tabla
Unidades cgs mks fpsLongitud cm m Pie (f t)Masa g kg slugTiempo s s sVelocidad cm=s m=s f t=sAceleracin cm=s2 m=s2 ft=s2
Fuerza dina Newton (N) Libra (lb)
Gtavedad 980cm=s2 9; 8m=s2 32ft=s2
Ejercicios 3
1. Se ja una masa de 18
de Kg: a un resorte con rigides k = 16 N=m: Lamasa se desplaza 1
2 m: hacia abajo de la posicin de equilibrio y luego se le
19
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
20/30
imparte una velocidad hacia abajo de 12 m=s: Despreciando cualquier fuerzade amortiguamiento externa que pueda esar presente, determinar la ecuacindel movimiento de la masa, junto con su amplitud, periodo y frecuencia natural.Despus de cunto tiempo pasa la masa por primera vez, por la posicin deequilibrio?
2. Una masa de 1 Kg: suspendida de un resorte lo estira 3; 5 cm. Si la masa sedesplaza 7 cm: por debajo de la posicin de equilibrio y se la aplica una veloci-dad hacia abajo de 7 cm=s:Establezca una ecuacin diferencial y condicionesiniciales que describan el movimiento. Encuentre la posicin y velocidad de lamasa en cada tiempo t:Encuentre la amplitud, perodo, ngulo fase y frecuen-cia del movimiento. Determina la posicin y velocidad 1 s: despus de soltar lamasa.
3. Una masa de 30 gr: se une a un resorte. En equilibrio el resorte se alargo20cm: El resorte se desplaza hacia abajo otros 10 cm: y se suelta. Establezca
la ecuacin diferencial para el movimiento y resulvala para determinar elmovimiento resultante ignorando las fuerzas externas y de amortiguamiento.
4. Una masa de 6 gr:se une a un sistema de masa-resorte con una constante deresorte de30gr=s2:Cules deben ser las condiciones iniciales para obtener unarespuesta con amplitud 3 y ngulo de fase de 4? Suponga que el movimientoes libre y no amortiguado.
5. Una masa de 3 K g: est unida a un resorte con rigidez K= 48N=m:La masase desplaza 1=2 m:hacia arriba del punto de equilibrio y recibe una velocidadde 2m=s:hacia abajo. La fuerza de amortiguamiento es despreciable. Deter-
mine la ecuacin del movimiento de la masa, junto con su amplitud, perodo yfrecuencia. cunto tiempo despus de la liberacin pasa la masa por primeravez por la posicin de equilibrio?
6. Una masa de 2 Kg:est unida a un resorte con rigidez k = 50N=m:La masa sedesplaza1=4mhacia arribas de la posicin de equilibrio y recibe una velocidadde1 m=s:hacia arriba. Desprecie la fuerza de amortiguamiento y determine laecuacin del movimiento de la masa, junto con su amplitud, perodo y frecuen-cia. cunto tiempo despus de la liberacin pasa la masa por primera vez porla posicin de equilibrio?
7. Una masa unida a un resorte oscila con un periodo de 3 s:Despus de agregar2 Kg:; el perodo se convierte en4 s: Si se desprecian las fuerzas de amor-tiguamiento o externas, determine cunta masa se adjunto originalmente alresorte.
20
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
21/30
5.2 Movimiento libre amortiguado
En la mayora de las aplicaciones de las vibraciones mecnicas existe cierto tipo defuerza de friccin o de amortiguamiento que afecta las vibraciones. Esta fuerza puededeberse a un medio que rodea el sistema o bien un amortiguador. Ahora estudiaremos
los efectos del amortiguamiento sobre las vibraciones libres, de modo que la ecuacin(30) se generaliza a
md2x
dt2 +b
dx
dt +kx = 0 (34)
La ecuacin (34) se puede escribir como
d2x
dt2 + 2
dx
dt +!2x= 0 (35)
donde
2= b
m y !2 =
k
m
La ecuacin (35) describe el movimiento libre amortiguado de un cuerpo. Su ecuacinauxiliar es
r2 + 2r+!2 = 0 (36)
y las races correspondientes son
r1 = +p
2 !2 y r2= p
2 !2
Ahora distinguiremos tres casos posible que dependen del discriminante 2 !2:
Caso 1. Movimiento sobreamortiguado (2
!2 > 0) Existe dos races
reales distintas de la ecuacin caracterstica, por lo tanto, la solucin general de laecuacin (35) es
x(t) =c1er1t +c2e
r2t (37)
Es claro que r2 < 0 y quep
2 !2 < ;por tanto tambin r1< 0:As
l{mt!+1
x(t) = 0
Adems, como
x0
(t) =c1r1er1t +c2r2e
r2t =1 er1t c1r1+c2r2e
(r2r1)t ;vemos que la derivada es idnticamente nula cuandoc1 = c2 = 0;o se anula a lo msen un valor de t que es solucin de la ecuacin
c1r1+c2r2e(r2r1)t
21
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
22/30
Si se ignora la solucin trivial x(t) = 0, implica que x(t) tiene a lo ms unmximo o un mnimo local para t > o. Por tanto x(t)no oscila. Esto deja solo tresposibilidades para el movimiento dex(t);como se muestra en la Figura 3, de acuerdocon las condiciones iniciales.
No hay mximoni mnimo
Hay unmximo
Hay unMnimo
Figura 3: Movimiento sobreamortiguado
Caso 2. Movimiento crticamente amortiguado (2 !2 = 0) Existe unanica raz de la ecuacin caracterstica, por tanto la solucin general de la ecuacin(35) es
x(t) = (c1+c2t) et
Para comprender el movimiento descrito porx(t);primero consideraremos el com-portamiento dex(t)cuanot ! +1:Por la ragla de LHopital
l{mt!+1
x(t) = l{mt!+1
c1+c2tet
= l{mt!+1
c2et
= 0
(Recuerde que >0). A continuacin, como
x0
(t) = (c2 c1 c2t) et
vemos de nuevo que una solucin no trivial puede tener a lo ms un mximo o unmnimo local parat >0;de modo que el movimiento no es oscilatorio. As se tiene unmovimiento crticamente amortiguado. Grcamente, los movimientos crticamenteamortiguados son similares a los movimientos sobreamortiguados.
Caso 3. Movimiento subamortiguado u oscilatorio (2!2 = 0) En estecaso existe dos races complejas conjugadas de la ecuacin caracterstica. Estas racesson i; donde
= y =p
!2 2
22
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
23/30
Por tanto, a solucin general de la ecuacin (35) es
x(t) =et (C1cos(t) +C2sen(t))
Como en el caso del movimiento libre no amortiguado, podemos expresar estasolucin en la forma alternativa
x(t) =Cetsenp
!2 2t +
Ahora es evidente quex(t)es el producto de un factor de amortiguamiento exponen-cial
cet
y un factor sinosoidalsen
p!2 2t +
que produce el movimiento oscilatorio. Debido a que el factor sinusoidal vara entre
1y 1 con periodo 2
p!22 ;la solucinx(t)vara entre cet
ycet
con cuasiperi-odo
P = 2p
!2 2y cuasifrecuencia 1
p:Adems como a = < 0; el factor exponencial tiende a cero
cuando t ! +1: En la Figura 4 aparece la grca de una solucin tpica. El sistema sellama subamortiguado, porque no hay un amortiguamiento suciente (es demaciadopequeo) para evitar que el sistema oscile.
c
-c
Figura 4: Movimiento subamortiguado u oscilatorio
Es fcil ver que cuando ! 0;el factor de amortiguamiento tiende a la constantec y la cuasifrecuencia tiende a la frecuencia natural del movimiento libre subamor-tiguado correspondiente. Por otra parte, los valores detdonde la grca dex(t)tocaa las curvas exponencialescet no siempre son iguales, pero son cercanos, a losmismos valores de t dondex(t)alcanza, los valores mximos y mnimos.
23
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
24/30
Ejercicios 4
1. Una masa de 1=4 Kg: est unida a un resorte con una rigidez de4 N=m: Laconstante de amortiguamientopara el sistema es de1 N s=m:Si la masa sedesplaza 1=2 m: hacia arriba y recibe una velocidad inicial de 1 m=s:hacia ar-
riba, determine la ecuacin del movimiento.Cul es el mximo desplazamientoque alcanzar la masa?
2. Una masa de 1=8 Kg: se une a un resorte con rigidez 16 N=m: La constantede amortiguamiento para el sistema es 2 N s=m: Si la masa se mueve 3=4mhacia arriba de la posicin de equilibrio y recibe una velocidad inicial haciaarriba de 2 m=s:, determine la ecuacin del movimiento del cuerpo y de sufactor de amortiguamiento, cuasiperiodo y cuasifrecuencia.
3. Una masa de 20 Kg:se une a un resorte con rigidez 200 N=m. La constantede amortiguamiento para el sistema es 140 N s=m: Si la masa se mueve 25cm:hacia abajo de la posicin de equilibrio y recibe una velocidad inicial hacia
arriba de1m=s:;cundo regresar por primera vez a su posicin de equilibrio?
4. Una masa de 2 Kg. se une a un resorte con rigidez 40N=m:La constante deamortiguamiento para el sistema es 8
p5 N s=m:Si la masa se mueve 10 cm
hacia abajo de la posicin de equilibrio y recibe una velocidad inicial hacia abajode2 m=s:, Cul ser el desplazamiento mximo con respecto de la posicin deequilibrio?
5. Una masa de1=4 Kg:se une a un resorte con rigidez 8 N=m:La constante deamortiguamiento para el sistema es 1=4 N s=m: Si la masa se mueve 1 m:hacia arriba de la posicin de equilibrio y se libera, Cul ser el desplazamiento
mximo hacia abajo?6. Una masa de 1 Kg: se une a un resorte con rigidez 100 N=m:La constante de
amortiguamiento para el sistema es 0; 2 N s=m:Si la masa se empuja haciaabajo de la posicin de equilibrio con una velocidad de 1 m=seg:, Cundoalcanzar su desplazamiento mximo hacia abajo?
7. Una masa de 1=4 K g: se une a un resorte con rigidez 8 N=m:La constante deamortiguamiento para el sistema es 2 N s=m: Si la masa se mueve 50 cm:hacia arriba de la posicin de equilibrio y recibe una velocidad inicial haciaarriba de2 m=s:, Cundo alcanzar su desplazamiento mximo hacia arriba?
8. Un resorte con una constante de8g=seg2
tiene un objeto unido que lo alarga 245cm. El coeciente de amortiguamiento es 8 g=seg:En el tiempo t = 0;la masase encuentra en posicin de equilibrio y tiene una velocidad de 3cm=seg:haciaabajo. Suponga que el movimiento es libre y: (a) Establezca la ecuacin difer-encial que describe el movimiento, (b) hallar la solucin de la ecuacin que sat-isfaga las condiciones iniales consideradas, (c) establezca el tipo de movimiento,
24
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
25/30
(d) bosqueje la representacin grca del movimiento del objeto, (d) determineque tanto se aleja el objeto de su posicin de equilibrio. (Sol : x(t) = 3te2t;elobjeto se aleja o,55 cm.)
9. Un resorte con una constante de 2 kg=seg2 tiene un objeto unido con una
masa de 10 kg. El coeciente de amortiguamiento es 9kg=seg:En el tiempot = 0 el cuerpo se encuentra en la posicin de equilibrio y tiene una veloci-dad de 5 m=seg: hacia abajo. Suponga que el movimiento e libre y amor-tiguado y: (a) Establezca el PVI que describe el movimiento, (b) hallar laposicin del cuerpo en cada tiempot, (c) bosqueje la representacin grca delmovimiento, (d) encuentre que tan lejos se mueve la masa de la posicin de
equilibrio. (Sol : x(t) = 50
e2
5t e 12 t
; la masa se mueve 4,095 m: de la
posicin de equilibrio.)
10. Un resorte con una constante de 226 gr=seg2 tiene un objeto unido con unamasa de25 gr. El coeciente de amortiguamiento es 10gr=seg:En el tiempot = 0el cuerpo se encuentra 20 cm:por debajo de la posicin de equilibrio ytiene una velocidad de 41 cm=seg:hacia abajo. Suponga que el movimiento elibre y amortiguado y: (a) Establezca el PVI que describe el movimiento, (b)hallar la posicin del cuerpo en cada tiempo t, (c) bosqueje la representacingrca de la funcin posicin del cuerpo, (d) determine el tiempo que tarda elcuerpo en pasar por primera vez por la posicin de equilibrio. (Sol : x(t) =e
1
5t (20 cos(3t) + 15sen(3t)) ;el cuerpo tarda 0,74 segen pasar por primera vez
por la posicin de equilibrio.)
5.3 Movimiento forzado
Ahora tomaremos en cuenta una fuerza externa Fe(t), que acta sobre una masaoscilatoria en un resorte. Esto es, investigaremos la EDO
md2x
dt2 +b
dx
dt +kx = Fe(t); (38)
que puede escribirse de la forma
d2x
dt2 + 2
dx
dt +!2x= F(t); (39)
donde2=
b
m; !2 =
k
m y F(t) =
Fe(t)
m
Es muy comn que la fuerza externa de un sistema masa resorte sea armnicasimple.
Fe(t) =F0cos(t) o Fe(t) =F0sen(t); (40)
25
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
26/30
dondeF0es la amplitud de la fuerza peridica y es su frecuencia angular.A continucin mostraremos un ejemplo de un movimiento forzado con amor-
tiguamiento.
Ejemplo 5.1 Consideremos un sistema msa-resorte formado por una masa de1=5
Kg:;unida a un resorte con rigidez de 2 N=m: La masa parte del reposo a 1=2 m:por debajo de su posicin de equilibrio. El movimiento tiene una constante de amor-tiguamiento de1; 2Ns=m:y est impulsada por una fuerza externaf(t) = 5 cos(4t)que se inicia cuando t= 0:
Solucin.El PVI que modela el problema es
1
5
d2x
dt2 +
6
5
dx
dt + 2x= 5 cos(4t); x(0) =
1
2; x
0
(0) = 0
La solucin del PVI es
x(t) = xc(t) +xp(t)
= e3t
38
51cos(t) 86
51sen(t)
25
102cos(4t) +
50
51sen(4t)
= 2
51
p2210e3tsen (t + 2; 73) +
25
102
p17sen (4t + 6; 04)
Ntese que la solucin complementaria xc(t)del ejemplo anterior tiene la propiedadde que
l{mt!+1xc(t) = l{mt!+1
2
51
p2210e
3t
sen (t + 2; 73) = 0
Como xc(t) se vuelve insignicante cuando t! +1, se dice que es un trminotransitorio o solucin transitoria. As, cuando el tiempo es grande, los desplaza-mientos de la masa del problema anterior son muy bien aproximados por la solucinparticcular xp(t):Esta lmina funcin se llama tambin solucin de estado estable,de estado estacionario o de estado permamente.
CuandoF(t)es una funcin peridica como (40), la solucin general de la ecuacin(39) es de la forma
x(t) =parte transitoria + parte estable
Cuado se ejerce una fuerza peridica y no existe fuerza de amortiguamiento, nohay parte transitoria en la solucin del problema. Si la fuerza peridica que se ejercetiene una frecuencia que es igual o casi igual a la de las vibraciones no amortiguadaslibres, se puede originar un grave problema en un sistema mecnico oscilatorio
26
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
27/30
Ejemplo 5.2 Resuelva el PVI
x00+ 9x= 5sen(t); x(0) = 0; x0(0) = 0; jj 6= 3Solucin.La solucin de la ecuacin homognea asociada a la EDO es
xc(t) =c1cos(3t) +c2sen(3t)
Aplicando el mtodo den los coecientes indeterminados obtenemos la solucin par-ticular
xp(t) = 5
9 2sen(t)Luego, la solucin general de la EDO es
x(t) =c1cos(3t) +c2sen(3t) + 5
9 2 sen(t)
Aplicando las condiciones iniciales obtenemos c1 = 0 y c2 =
5
3(92
):Por tanto, la
solucin del PVI es
x(t) = 5
3
9 2 (sen(3t) + 3sen(t)) ; jj 6= 3
Para = 3;la solucin del PVI se dene como
x(t) =l{m!3
5
3
sen(3t) + 3sen(t)9 2 =
5
18sen(3t) 5
6t cos(3t)
Ntese que cuandotn= n3
; n= 1; 2; 3;:::;
jx(tn)j =5n8 ! +1 si n ! +1
Por tanto, los desplazamientos crecen cuando t! +1: Este fenmeno se llamaresonancia pura. La Figua 5 muestra un movimiento caracterstico de este caso
27
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
28/30
Figura 5: Resonancia pura
La solucin anterior es consecuencia de resolver el PVI
x00+ 9x= 5sen(3t); x(0) = 0; x0(0) = 0
directamente por los mtodos convencionales.Si la gura anterior describe en realidad los desplazamientos de un sistema de
resorte y masa, este sistema se destruira. Las oscilaciones grandes de la masa forzarnal resorte a rebasar su lmite elstico. Se podra decir que el modelo descrito esirreal por completo, porque no tiene en cuenta los efectos retardantes de las siemprepresentes fuerzas de amortiguamiento. No se puede tener resonancia pura cuandose considera un amortiguamiento mnimo, pero si se pueden desarrollar amplitudesgrandes e igualmente destructivas de vibracin, pero acotadas cuando t ! +1:
Ejercicios 5
1. Un objeto con na masa de 2 kg. est suspendido del extremo de un resorteque tiene una constante de 128 kg=seg2, suponiendo que el movimiento es noamortiguado y que se aplica una fuerza externa dada por f(t) = 40 cos(8t)parat >0 :(a) encuentre la posicin del objeto en cada tiempotsi ste se mueve 16m:hacia abajo de la posicin de equilibrio y se suelta, (b) dar una interpretacinfsica de lo que sucede con el movimiento del objeto cuando t crece.
Sol : x(t) = 16cos(8t) + 54tsen(8t)
2. Una masa de 8 kg: se une a un resorte que cuelga desde el techo, haciendo queel resorte se estire 1.96 m:hasta llegar al reposo en equilibrio. En el instantet= 0se aplica una fuerza externa f(t) = cos(2t)N:al istema. La constante deamortiguamiento del sistema es 3 N seg=m: Determine la solucin de estadoestable para el sistema.
Sol : xp(t) = 225cos(2t) +
350sen(2t):
3. La respuesta de un sistema sobreamortiguado a una fuerza constante quedadescrita mediante la ecuacin
2x00
+ 8x0
+ 6x= 18:
Si el sistema parte del reposo (x(0) = x0
(0) = 0), calcule x(t) y bosqueje surepresentacin grca. Cul es el valor de l{m
t!+1x(t)?
Sol : x(t) = 12(3e3t 9et) + 3:
28
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
29/30
6 Circuitos en serie LRC
Si i(t) representa la corriente en un circuito elctrico en serie LRC, de acuerdo conla segunda ley de Kirchho, la suma de las cadas de voltaje a travs del inductor,resistor y capacitor es igual al voltaje aplicado al circuito; esto es
Ldi
dt+Ri+
1
Cq= E(t)
Pero i(t) = dqdt
, de manera que la ecuacin anterior se transforma en la ecuacindiferencial lineal de segundo orden
Ld2q
dt2 +R
dq
dt+
1
Cq= E(t) (41)
La nomenclatura que se emplea en el anlisis de circuitos, es similar a la que seusa en los sistemas de resorte y masa.
Sistema mecnico Sistema elctricoMasam Inductancia Lconstante de amortiguamiento ResistenciaRConstante del resorte k Recproco de la capacitancia 1
C
Posicinx CargaqFuerza externa f Fuerza electromotriz E
En consecuencia, la mayora de los resultados deducidos para los sistemas mecni-cos pueden aplicarse de inmediato a circuitos elctricos. El hecho de que la mismaecuacin diferencial sirva como modelo matemtico para sistemas fsicos tan diferenteses una ilustracin poderosa del papel unicador de las matemticas en la investigacinde fenmenos naturales.
Si E(t) = 0, las vibraciones elctricas del circuito se llaman libres. Como laecuacin auxiliar de la ecuacin homognea asociado a la ecuacin anterior es
Lm2 +Rm+ 1=C= 0;
habrn tres formas de la solucin cuando R6= 0, dependiendo del valor del dis-criminanteR2 4L
C. Se dice que el circuito es
1. Sobreamortiguadosi R2 4LC
>0
2. Crticamente amortiguadosi R2 4LC = 03. Subamortiguadosi R2 4L
C
7/26/2019 Ecuaciones Diferenciales Lineales de Segundo Orden
30/30
En cada uno de los tres casos, la solucin de la ecuacin lineal contiene el factore
R
2L , as que q(t)! 0cuando t! +1. CuandoE(t) = 0y R = 0, se dice que elcircuito es no amortiguado, y las vibraciones elctricas no tienden a cero cuando taumenta sin lmite; la respuesta al circuito es armnica simple.
Cuando hay un voltaje E(t) aplicado en el circuito, se dice que las vibraciones
elctricas son forzadas. Cuando R6= 0, la solucin de la homognea asociada sellamasolucin transitoria. SiE(t)es peridico o constante. La solucin particularde la ecuacin lineal, es una solucin de estado estable, solucin permanenteosolucin remanente.
Ejercicios 6
1. Encuentre la carga en el capacitor de un circuito LRC en serie en cuando t =0; 01s:cuando L = 0:05 h:; R = 2 :; C = 0:01 f:; E(t) = 0 v:; q(0) = 5 c:ei(0) = 0A: Determine la primera vez que la carga en capacitor es igual a cero.
2. Calcule la carga en el capacitor de un circuito en serie LC cuando L = 0:01 h:;C= 0:1 f:; E(t) = 100sent v:; q(0) = 0 c: e i(0) = 0 A: Cul es la carga en elcapacitor cuando ha transcurrido mucho tiempo?
Sol : q(t) = 32e10t(cos(10t) +sen(10t)) + 32
3. Determine la carga y la corriente en un circuito en serie LRC cuando L = 12 h:;R = 10 :; C = 0:01 f:; E(t) = 150 v:; q(0) = 1 c:e i(0) = 0 A:Cul es lacarga en el capacitor cuando ha transcurrido mucho tiempo?
Sol : q(t) = 10099(10sen(t) sen(10t))
4. Encuentre la carga permanente y la corriente remanete en un circuito LRC enserie cuandoL = 1h:; R= 2 :; C= 0:25 f :y E(t) = 50cos t v:
30