DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE …de una tarjeta de adquisición de las variables...
120
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE SUPERVISIÓN, MONITOREO Y CONTROL DE TEMPERATURA, PRESIÓN Y TIEMPO DE PROCESO EN UN SISTEMA DE DIGESTIÓN ANAERÓBIA DE BIOMASA (CONTENIDO RUMINAL BOVINO) A ESCALA DE LABORATORIO PULIDO APONTE ALVARO ERVEY ESPITIA PARDO JHON JAIRO Tesis de Ingeniería en Control Director: Ing. Frank Nixon Giraldo Ramos Universidad Distrital Francisco José de Caldas Facultad Tecnológica Programa de Ingeniería en Control Bogotá, Junio de 2016
Transcript of DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE …de una tarjeta de adquisición de las variables...

DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE SUPERVISIÓN,
MONITOREO Y CONTROL DE TEMPERATURA, PRESIÓN Y
TIEMPO DE PROCESO EN UN SISTEMA DE DIGESTIÓN
ANAERÓBIA DE BIOMASA (CONTENIDO RUMINAL BOVINO) A
ESCALA DE LABORATORIO
PULIDO APONTE ALVARO ERVEY
ESPITIA PARDO JHON JAIRO
Tesis de Ingeniería en Control
Director:
Ing. Frank Nixon Giraldo Ramos
Universidad Distrital Francisco José de Caldas
Facultad Tecnológica
Programa de Ingeniería en Control
Bogotá, Junio de 2016

PULIDO APONTE ALVARO ERVEY
ESPITIA PARDO JHON JAIRO
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE SUPERVISIÓN,
MONITOREO Y CONTROL DE TEMPERATURA, PRESIÓN Y
TIEMPO DE PROCESO EN UN SISTEMA DE DIGESTIÓN
ANAERÓBIA DE BIOMASA (CONTENIDO RUMINAL BOVINO) A
ESCALA DE LABORATORIO.
Tesis presentada al Programa de Ingeniería en Control de la universidad
Distrital “Francisco José de Caldas” Facultad Tecnológica, para obtener el
título de Ingeniero en Control
Programa:
Ingeniería en Control
Director:
Ing. Frank Nixon Giraldo Ramos
Bogotá, Junio de 2016

Dedicatoria
Una dedicatoria no basta para expresar el amor que sentimos por aquellas
personas que nos dieron la vida, las que con mucho amor nos empezaron a
formar desde que vimos la primera luz reflejada en aquellos ojos que con alegría
nos daban la bienvenida a este mundo, a aquellos padres que con esfuerzo, sudor
y fortaleza en sus hombros, lucharon por asegurar en nosotros una vida digna y de
nosotros unas buenas personas. Esta tesis está dedicada a nuestras familias,
quienes nunca perdieron la fe en nosotros, cuyas palabras y motivaciones llenan
de perseverancia nuestro camino.
Agradecimientos
A todas aquellas personas que participaron en el desarrollo de este proyecto
especialmente a los profesores, Hernán Mauricio Rivera Escobar y Jorge
Federico Ramírez Escobar, por su orientación, seguimiento, excelente asesoría,
compromiso incondicional y motivación ofrecida a lo largo de estos meses.
A nuestro compañero y amigo, William Alejandro Sánchez, por su ayuda
incondicional en la configuración del servidor web; A la profesora Gloria Ramírez
Sánchez, por facilitarnos el biodigestor objeto de este desarrollo; Y a nuestras
familias, por el apoyo, el calor afectivo y la paciencia que solo ellos pueden
ofrecernos a diario.
A todos ellos, muchas gracias.

5
Resumen
La disposición final de los residuos biosólidos producto de las actividades
industriales, comerciales domésticas y agropecuarias, ha desencadenado una
compleja serie de problemáticas ambientales, económicas y sociales; las cuales
impulsan el desarrollo de proyectos de investigación enfocados a mitigar algunos
impactos desfavorables para el planeta. Particularmente los residuos de origen
agropecuario como el contenido ruminal bovino (CRB) representan una gran
amenaza, debido a la carga orgánica generada por estos, la cual generalmente se
vierte de forma directa a los causes de agua y en campos a cielo abierto. La
implementación de biodigestores es una opción rentable y eficiente en el manejo
adecuado de dichos residuos y en la generación de algunos productos
aprovechables como recurso energético, que en conjunto con estrategias de
control, supervisión y modelamiento de variables, generan un impacto favorable
para el medio ambiente.
El proceso objeto de esta investigación denominado digestión anaeróbia es un
proceso bioquímico que se efectúa en ausencia de oxígeno en un reactor químico
(biodigestor), mediante una serie de eventos bacterianos que a determinadas
condiciones como rangos de temperatura optima, pH, presión, entre otros;
transforman la materia orgánica en gas, compuesto por metano (CH4), dióxido de
carbono (CO2) y sulfuro de hidrogeno (H2S).
El presente trabajo de investigación documenta los métodos utilizados en el
desarrollo de un sistema de control y supervisión por medio de la implementación
de una tarjeta de adquisición de las variables asociadas y un servidor web a través
de los protocolos de comunicación HTTP, SSH y los lenguajes de programación C,
PYTHON y HTML; implementado en un Biodigestor discontinuo a escala de
laboratorio; posteriormente se plantea el modelo dinámico del comportamiento del
sistema de digestión anaerobia para la biomasa CRB.
Palabras clave: Bioreactor, temperatura, presión, sensores, control, supervisión.

6
Abstract
The final disposal of biosolids waste product of industrial, domestic and agricultural
business, has triggered a complex set of environmental, economic and social
problems; which drive the development of research projects aimed at mitigating
some adverse impacts on the planet. Particularly residues of agricultural origin
such as bovine rumen contents (BRC) pose a great threat. The implementation of
biodigesters is a cost effective and efficient option in the proper management of
such waste and the generation of some usable products as an energy resource,
which together with control strategies, monitoring and modeling of variables,
generate a favorable impact on the environment ambient.
The process object of this research called anaerobic digestion is a biochemical
process is performed in the absence of oxygen in a chemical reactor (digester),
through a series of bacterial events certain conditions as ranges optimum
temperature, pH, pressure, etc, transform organic matter into gas composed of
methane (CH4), carbon dioxide (CO2) and hydrogen sulfide (H2S).
This research documents the methods used in the development of a system of
control and supervision by implementing an acquisition card associated variables
and a web server via the communication protocols HTTP, SSH and languages
programming C, PYTHON and HTML; Biodigestor implemented in a batch
laboratory scale; the dynamic model of system behavior for biomass anaerobic
digestion ruminal content was subsequently raised cattle.
Keywords: Bioreactor, temperature, pressure, sensors, control, monitoring.
7
Contenido
1. INTRODUCCIÓN ............................................................................................ 16
1.1. Planteamiento del problema ..................................................................... 18
1.1.1. Problemática ambiental ..................................................................... 18
1.1.2. Contexto energético en Colombia ...................................................... 18
1.1.3. Problemática en la innovación tecnológica ........................................ 19
1.2. Justificación .............................................................................................. 20
1.3. Objetivos .................................................................................................. 21
1.3.1. Objetivo General ................................................................................ 21
1.3.2. Objetivos Específicos ........................................................................ 21
2. MARCO DE REFERENCIA ............................................................................ 22
2.1. Antecedentes ........................................................................................... 22
2.2. Marco teórico ........................................................................................... 24
2.2.1. Marco legal ........................................................................................ 24
2.2.2. Proceso de digestión anaeróbia ........................................................ 25
2.2.4. Cinética Química ............................................................................... 28
2.2.5. Modelamiento De Sistemas ............................................................... 29
2.2.6. Instrumentación ................................................................................. 31
2.2.7. Protocolos De Comunicación ............................................................ 31
2.2.8. Sistemas De Control .......................................................................... 33
3. MATERIALES Y MÉTODOS ........................................................................... 38
3.1. Diseño experimental................................................................................. 38
3.1.1. Modelo experimental ......................................................................... 42
3.1.2. Descripción general del sistema ........................................................ 43
3.2. Experimentación ...................................................................................... 44
3.2.1. Densidad ........................................................................................... 44
8
3.2.2. Porcentaje de Humedad .................................................................... 45
3.2.3. Porcentaje de materia orgánica ......................................................... 45
3.2.4. Concentración de la mezcla reactante (BM) ...................................... 45
3.2.5. Calores específicos del CRB y la mezcla reactante .......................... 46
3.2.6. Desinfección y esterilización del biodigestor ..................................... 47
3.2.7. Cargue de la biomasa ........................................................................ 48
3.2.8. Extracción y cuantificación del biogás ............................................... 48
Figura 3. Protocolos estandarizados en el laboratorio. A. diagrama
desinfección y esterilización. B. Diagrama cargue de la biomasa en el interior
del biodigestor. C. Diagrama extracción y cuantificación del biogás obtenido
durante el proceso. Cada diagrama expresa el acondicionamiento realizado en
el reactor, biomasa y gas extraído. ................................................................. 50
3.2.9. Medición y control de pH ................................................................... 50
3.2.10. Tiempo de retención de la biomasa asociado al tiempo de proceso
50
3.3. Sensores y actuadores ............................................................................. 51
3.3.1. Transmisor de temperatura PT100 .................................................... 51
3.3.2. Transmisor de presión YB131 ........................................................... 53
3.3.3. Electroválvula PDI 01044 .................................................................. 54
3.3.4. Tratamiento de los lazos de corriente ................................................ 55
3.3.5. Transmisor de temperatura ............................................................... 57
3.3.6. Transmisor de presión ....................................................................... 58
3.4. Supervisión .............................................................................................. 59
3.4.1. Descripción general del sistema de supervisión ................................ 59
3.4.2. Sistema de adquisición distribuida de señales .................................. 59
3.4.3. Instalación y configuración de Raspbian ........................................... 60
3.4.4. Conexión de la Raspberry pi2 a través del protocolo SSH ................ 63
3.4.5. Consola y comandos utilizados ......................................................... 64
9
3.4.6. WebIOPi ............................................................................................ 65
3.4.7. Procesamiento de los datos con Python ............................................ 69
3.4.8. Creación de los archivos html ............................................................ 69
3.4.9. Creación del DNS (Domain Name System) ....................................... 70
3.5. Modelo Dinámico ..................................................................................... 71
3.5.1. Modelamiento de la reacción química ............................................... 72
3.5.2. Modelamiento de temperatura ........................................................... 73
3.5.3. Modelamiento de la sobrepresión del reactor .................................... 74
3.6. Simulación del modelo matemático .......................................................... 75
3.6.1. Bloques implementados y sub sistema parámetros ........................... 75
3.6.2. Sub sistemas realizados en la simulación ......................................... 78
3.7. Control ...................................................................................................... 78
3.7.1. Identificación de la respuesta en temperatura ................................... 78
3.7.2. Diseño del controlador ....................................................................... 79
4. RESULTADOS Y DISCUSIÓN ....................................................................... 83
4.1. Resultados de la fase experimental. ........................................................ 83
4.1.1. Caracterización .................................................................................. 83
4.1.2. Sobrepresión del biodigestor ............................................................. 86
4.1.3. Análisis sobre la presión generada y el producto .............................. 89
4.2. Desarrollo del modelo dinámico ............................................................... 89
4.3. Resultados de las simulaciones del modelo dinámico ............................. 93
4.4. Resultados del control .............................................................................. 96
4.5. Resultados de la supervisión del proceso ................................................ 99
5. CONCLUSIONES ......................................................................................... 101
RECOMENDACIONES Y ALCANCES ................................................................ 102
REFERENCIAS BIBLIOGRAFICAS .................................................................... 103
ANEXOS ............................................................................................................. 107
10
Lista de Figuras
Figura 1. Funcionamiento protocolo SSH ............................................................. 33
Figura 2. Descripción general del sistema ............................................................ 43
Figura 3. Protocolos estandarizados en el laboratorio .......................................... 50
Figura 4. Características e ilustraciones del transmisor de temperatura PT100... 53
Figura 5. Transmisor de presión, acondicionamiento y actuadores ...................... 55
Figura 6. Instalación y configuración de Raspbian ............................................... 63
Figura 7. WebIOPi primeros pasos ....................................................................... 66
Figura 8. Configuración de los directorios predefinidos por webiopi ..................... 67
Figura 9. Conexión de dispositivos al puerto serie ............................................... 68
Figura 10. Configuración del puerto serie en webiopi ........................................... 69
Figura 11. Creación de un dominio gratuito para el servidor web ......................... 71
Figura 12. Bloques usados en las simulaciones ................................................... 76
Figura 13. Sub sistemas de la simulación del modelo dinámico........................... 78
Figura 14. Procedimiento establecido en la identificación del sistema de
calentamiento ................................................................................................. 80
Figura 15. Estimación del algoritmo de control ..................................................... 81
Figura 16. Resultados de caracterización de la biomasa CRB ............................. 85
Figura 17. Calor especifico del CRB y del reactante ............................................ 86
Figura 18. Resultados de sobrepresión registrada en la fase experimental ......... 88
Figura 19. Resultado de las simulaciones ............................................................ 96
Figura 20. Identificación del sistema en temperatura ........................................... 97
Figura 21. Determinación del algoritmo de control de temperatura ...................... 98
Figura 22. Resultados de la supervisión del sistema .......................................... 100
Lista de Diagramas
Diagrama 1. Transformaciones bioquímicas de la biomasa ................................. 26
Diagrama 2. Representación gráfica del diseño experimental ............................. 41
Diagrama 3. Descripción general de la supervisión .............................................. 59

11
Diagrama 4. Metodología desarrollada en el modelamiento. ............................... 72
Diagrama 5. Analogía del circuito térmico con un circuito eléctrico RC. ............... 73
Lista de ilustraciones
Ilustración 1. Modelo experimental ...................................................................... 42
Ilustración 2. Medición y control del pH ............................................................... 50
Ilustración 3. Configuración de PUTTY ............................................................... 64
Lista de Tablas
Tabla 1. Calores de formación y combustión para algunos productos químicos. . 29
Tabla 2. Relaciones matemáticas cálculo de la concentración del reactante. ...... 46
Tabla 3. Valores de los parámetros del controlador según Ziegler-Nichols. ......... 79
Tabla 4. Características generales de los experimentos realizados ..................... 86
Tabla 5. Parámetros técnicos del sistema de calentamiento. ............................... 92
Lista de anexos
Anexo 1. Protocolo de desinfección y esterilización .......................................... 107
Anexo 2. Protocolo del cargue de la biomasa ................................................... 109
Anexo 3. Protocolo de extracción y cuantificación ............................................. 110
Anexo 4. Código adquisición y transmisión de los datos obtenidos por el
conversor análogo digital del arduino ........................................................... 111
Anexo 5. Características del sistema embebido Raspberry pi2 y Arduino uno.. 112
Anexo 6. Lectura de los sensores, procesamiento y control de las variables
asociadas ..................................................................................................... 113
Anexo 7. Código del script temp.py ................................................................... 117
Anexo 8. Código del archivo index.html ............................................................ 118
Anexo 9. Código del archivo presion.html ......................................................... 118
Anexo 10. Adaptaciones del modelo experimental ............................................ 119
Anexo 11. Segmento codigo control tiempo de proceso ................................... 120

12
Lista de abreviaturas
i
3
BM mol
3
P mol
mol
CRB Contenido ruminal bovino
A Factor de frecuencia en la ecuacion de Arrhenius
A Area del reactor
C Concentración del reactante (lb /pie )
C Concentración del producto (lb /pie )
ΔH Entalpia de la reacción (Btu/lb )
R Const mol
BM
M
3
mol
3
M mol
e
BM
ante de los gases (Btu/lb g°R)
T Temperatura de la biomasa (°F)
T Temperatura en las paredes del reactor (F°)
ρ Densidad de la biomasa (lb /pie )
ρ Densidad del material del reactor (lb /pie )
C Calor especifico de la biomas mol
e
M mol
3
BM
3
M
3
i
a (Btu/lb °F)
C Calor especifico del material del reactor (Btu/lb °F)
V Volumen de la biomasa (pie )
V Volumen de las paredes del reactor (pie )
μ Coeficiente pelicular de transferencia de calor interno (Btu/°Fgpie gs)
λ Cal mol
BM
h
dh
or exotermico de la reacción (Btu/lb °Fgs)
Γ Velocidad de la reacción
M Masa dela biomasa
H Porcentaje de humedad de la biomasa contenido ruminal bovino
M Masa del contenido ruminal bovino hidratado
M Masa del contenido ruminal bo
ic
vino deshidratado
M Masa del contenido ruminal bovino incinerado a 600°C

13
Glosario
Biomasa: En una acepción estrictamente ecológica, se define como un conjunto
de sustancias orgánicas procedentes de seres vivos depositados en un
determinado lugar. También se entiende como el conjunto de materia orgánica
renovable de origen vegetal, animal o procedente de la transformación natural o
artificial de la misma.
Combinación, esta se presenta mediante la unión de una molécula o átomo con
otra especie para formar un compuesto nuevo.
Contenido ruminal bovino (CRB): El CRB es un producto obtenido de la
matanza del ganado bovino y representa el alimento ingerido. Este es desechado
al momento del sacrificio. Es una mezcla de material no digerido que tiene la
consistencia de una papilla, con un color amarillo verdoso y un olor característico
muy intenso cuando está fresco.
Consola Raspbian: La consola es la herramienta que permite configurar por
comandos de texto la matriz de control.
Controlador Raspberry Pi: También conocido como matriz de control, es
básicamente un computador de placa reducida pero de bajo costo.
Descomposición, consiste en la división de una molécula, en moléculas más
pequeñas, átomos o radicales.
Enrutador local: Dispositivo local que debe estar en el sitio de trabajo el cual
posee conexión a internet, el cual permite la interconectividad de los equipos a
una red MAN (Metropolitan Area Network), este a su vez permite la transmisión de
paquetes de información entre la nube y nuestro equipo.
Framework: El término framework, se refiriere a una estructura de software
compuesta de elementos personalizables e intercambiables para el desarrollo de
multiples aplicaciones específicas. En otras palabras, un framework se puede
considerar como una aplicación genérica incompleta y configurable a la que se le
pueden agregar las últimas piezas para construir una aplicación concreta.
Internet: Herramienta de comunicación de redes utilizada permitiendo enlazar al
protocolo HTTP para transmisión de datos a altas velocidades del sistema.
Isomerización, se efectúa mediante el cambio de configuración estructural
interna, que no involucra descomposición o combinación.
Puerto 22: Es el puerto usado para la comunicación de datos encriptados por
consola, permite acceder a la raíz de la matriz de control.

14
Puerto 443: El puerto 443 de TCP, es el predeterminado que utiliza el HTTPS
(Hypertext Transfer Protocol Secure).Si este puerto está bloqueado en cualquier
servidor o dispositivo desde la computadora hacia un destino determinado, como
www.microsoft.com, tu conexión a cualquier sitio HTTPS fallará y el navegador
mostrará un mensaje de error como " Error de conexión segura " o " La página no
se puede mostrar”. Este fallo estará directamente en el router porque no tenemos
abierto el puerto.
Reacción química: Se conoce como reacción química a aquella operación
unitaria que tiene por objeto distribuir de forma distinta los átomos de ciertas
moléculas (compuestos reaccionantes o reactantes) para formar otras nuevas
denominadas productos implicando de esta forma un cambio químico.
Reactor químico: Un reactor químico es un equipo en cuyo interior se lleva a
cabo una o varias reacciones químicas. Este está constituido por un recipiente
hermético, el cual cuenta con líneas de entrada de reactivos y salidas de
productos [1].
Reactor continuo: Los reactores continuos son recipientes agitados, ya sea de
modo simple o cascada, estos poseen un flujo constante de alimentación de
reactivos y de salida de productos. También se caracterizan por mantenerse en
condiciones estacionarias del proceso en donde no varía el grado de la reacción
significativamente. Los reactores continuos se implementan en procesos donde no
hay una variedad de productos pero si la dependencia de ciertas condiciones
específicas [2].
Reactor discontinuo o Batch: Los reactores discontinuos se caracterizan por ser
recipientes donde inicialmente se cargan los reactantes y se extraen los productos
una vez la reacción ha terminado. Para obtener los productos deseados se deben
mantener las condiciones físicas requeridas por el proceso, La principal ventaja de
este reactor es la diversidad de productos que se pueden obtener de un mismo
conjunto de reacciones. Una de las principales desventajas de este tipo de
sistemas, son las eventuales variabilidades excesivas de la reacción, motivo por el
cual es necesario un control óptimo del sistema.
Tarjeta de adquisición de datos: Dispositivo encargado de recibir las señales
análogas de los sensores, desempeña el papel de conversor análogo digital, envía
los datos obtenidos al controlador Raspberry pi.

15
Factores de conversión
2 4 2 6 2 6 2 2 2 2
3 3 3 3 3
3 3
3 3
1 10 10 10 1 144 0.09290304
1 / 1 / 1000 / 1 / 62.428 / 0.036127 /
1 / 1728 /
1 / 0.062428 /
1
mol mol
mol mol
mol
m cm mm km m in m
g cm kg L kg m g cm lb ft lb in
lb in lb ft
kg m lb ft
kJ
METRICO METRICO INGLES
AREA
DENSIDAD
ENERGIA
3
2 2 3
2 2
1000 1000 1 1 0.94782
1 / 1000 / 1 1.055056 5.40395
1 3600 1 / 25.037 / 2.326 /
1 4.184 1 / 0.430 /
1 4.1868 1 3412.14
1 4.1868
mol
mol
cal
J N m kPa m kJ Btu
kJ kg m s Btu kJ psia ft
kWh kJ Btu lb ft s kJ kg
cal J kJ kg Btu lb
IT J kWh Btu
Cal
2 4 2 2 2
2 4
3 3
1 / 10 / 1 / 0.3171 /
1 1000 1 2.2046226
1 0.45359237
1 1 / 1 3412.14 /
1 / 1.055056 /
1 1 / 1 1.4504 10
1 10 10
mol
mol
kJ
FLUJO DE CALOR
W cm W m W m Btu h ft
kg g kg lb
lb kg
W J s kW Btu h
Btu h kJ h
Pa N m Pa x psia
kPa Pa MP
MASA
POTENCIA
PRESIÓN
1 14.696
1 101.325 1.01325
760 (0 )
1 / 1 / 1 / 4.168 /
1 / 4.1868 /
1 / 0.23885 / 0.23885 /
mol
mol
mol mol
a atm psia
atm kPa bar
mm Hg C
kJ kg C kJ kg K Btu lb F kJ kg C
Btu lb R kJ kmol K
kJ kg C Btu lb F Btu lb R
CALOR ESPECIFICO
16
1. INTRODUCCIÓN
El CRB es un material pre digerido que se encuentra en el primer estómago del
ganado bovino o vacuno y es un subproducto originado de su sacrificio [3]. Este
material, representa un gran potencial energético debido a su gran riqueza en
composición química, flora y fauna microbiana, que de ser dispuesto
adecuadamente, puede generar productos que mitiguen las problemáticas
ambientales, sociales y energéticas que surgen del no aprovechamiento y mala
disposición de este contenido ruminal en un país como Colombia cuya actividad
ganadera es creciente.
Una de las alternativas de aprovechamiento del gran potencial energético del CRB
y de otro tipo de residuos biosólidos, que ha tenido un importante auge en las
últimas décadas, es la obtenida por medio de biodigestión anaerobia; un proceso
bioquímico que se efectúa en ausencia de oxígeno en un reactor químico llamado
biodigestor, mediante una serie de eventos bacterianos que a determinadas
condiciones de temperatura, pH, presión, entre otros; transforman la materia
orgánica (biomasa) en gas, compuesto por metano (CH4), dióxido de carbono
(CO2) y sulfuro de hidrogeno (H2S) [4].
La biomasa es el conjunto de materia orgánica renovable (no fósil), de origen
vegetal, animal o procedente de la transformación natural o artificial de la misma
[5], para este caso el CRB, es una biomasa con alta posibilidad de
aprovechamiento ya que la tecnología que requiere para digestión anaerobia
mediante bioreactores existe en el mercado y su costo es muy inferior al de otras
energías alternativas.
Sin embargo, la biodigestión es un proceso espontaneo y natural, pero para
efectos de aprovechamiento del potencial energético y dado que los reactivos
químicos se convierten en otros productos de manera bien definida, se requiere un
sistema que permita controlar el proceso. El no controlar las condiciones al interior
del biodigestor, produce efectos sobre la eficiencia de la reacción química; esto
puede ocurrir debido a un mal funcionamiento de la instrumentación, un cargue
17
incorrecto de la biomasa o mediante la presencia de agentes biológicos o
químicos (generalmente presentados en contaminantes como el agua, el oxígeno
del aire, residuos de detergentes u otros compuestos) [6]. Esto puede afectar
considerablemente las condiciones bajo las cuales la reacción tiene lugar y no
habría un aprovechamiento óptimo de la biomasa como fuente energética.
Es por esto, que el proceso de producción de biogás a escala de laboratorio inicia
mediante los protocolos experimentales desarrollados para la desinfección previa
de los instrumentos, el cargue de la biomasa, la recolección y cuantificación del
biogás, pasando por la implementación de la instrumentación pertinente y
estableciendo criterios de control y supervisión adecuados para algunas de las
variables asociadas al proceso bioquímico (temperatura y presión).
El presente trabajo de investigación documenta la implementación de un sistema
de control y supervisión por medio de una tarjeta de adquisición de las variables
asociadas a un servidor web a través de los protocolos de comunicación HTTP,
SSH y los lenguajes de programación C, PYTHON y HTML; implementado en un
Biodigestor discontinuo a escala de laboratorio; posteriormente se describe la
reacción llevada a cabo en el biodigestor, a partir de un modelo matemático con
base en la transferencia de calor, composición química de los reactivos de la
biomasa (CRB) y la cuantificación del producto obtenido.

18
1.1. Planteamiento del problema
1.1.1. Problemática ambiental
Siendo Colombia un país cuya actividad ganadera fomenta gran crecimiento en la
economía, aun no se establecen políticas claras ni entes regulatorios sobre el
manejo de desechos pecuarios, en la mayoría de las plantas de sacrificio y
mataderos del país se han generado aproximadamente 85000 toneladas/año de
CRB, de estas, el 84% se vierte directamente a los causes de agua o en campo
abierto [7] [8].
Esta realidad, evidencia una mala disposición de este residuo en particular, y
consecuencia de ello, un índice muy alto de contaminación, debido a la carga
orgánica que se genera y se vierte de forma directa o indirecta (por medio de los
lixiviados que se filtran) a los afluentes hídricos, rellenos sanitarios, campos a cielo
abierto, entre otros [9]; afectando algunos ecosistemas. Adicionalmente, los
procesos de fermentación y descomposición de materia orgánica suelen ser foco
de malos olores y baja calidad en el aire, causando situaciones de insalubridad
que sumado a la densidad demográfica son fuente de proliferación de roedores,
insectos y en algunos casos pandemias.
1.1.2. Contexto energético en Colombia
La disposición del CRB genera una serie de subproductos que no son
aprovechados de manera eficiente, dado que posee una gran riqueza
microbiológica y de composición química, puede favorecer bajo condiciones
controladas, la producción de gas metano, que a su vez puede ser utilizado como
fuente energética.

19
Una de las problemáticas a considerar es la insuficiencia energética ya que en un
país con abundancia de recursos energéticos paradójicamente estos se
distribuyen de manera no uniforme generando zonas no interconectadas (ZNI);
“para todos los efectos relacionados con la prestación del servicio público de
energía eléctrica se entiende por ZNI a los municipios, corregimientos, localidades
y caseríos no interconectados al SIN – Sistema Interconectado Nacional” [10].
Las ZNI cubren alrededor del 52% del área territorio nacional colombiano,
focalizada específicamente en las áreas rurales y de difícil acceso, incluyen 17
departamentos, 5 capitales departamentales, 54 cabeceras municipales y 1.562
localidades, en estas la prestación del servicio energético se realiza mediante
plantas de generación diesel, quema de leña y carbón entre otros [11].
1.1.3. Problemática en la innovación tecnológica
Es evidente un aumento en la aplicación de los biodigestores a nivel internacional
como alternativa con un gran impacto potencial en la disposición de residuos
biosólidos y generación de energías sostenibles amigables con el medio ambiente,
sin embargo, a la fecha en Colombia, las iniciativas orientadas a la
implementación de sistemas que lleven al aprovechamiento del CRB, como
biomasa optima en la digestión anaeróbica para la generación de recursos
energéticos es insuficiente; lo que como consecuencia lleva a una reducida
implementación de sistemas de supervisión y control de algunas variables como
temperatura, pH, tiempo de operación (condiciones de operación) y presión
(variable que garantiza la integridad y seguridad del operador) que lleven al
desarrollo de modelos dinámicos que describan el comportamiento de reactores
con biomasa CRB.

20
1.2. Justificación
El desarrollo de esta tesis representa una oportunidad de integrar los fenómenos
naturales, como lo es la digestión anaerobia, con los sistemas de control y
supervisión de procesos. También se propone un manejo adecuado y una
disposición amigable con el medio ambiente del CRB, siendo este un residuo
biosólido generado de forma indiscriminada por las actividades ganaderas del
país.
Teniendo en cuenta la gran riqueza microbiológica y de composición química del
CRB, se evidenció que por medio de un control adecuado de algunas condiciones
específicas del proceso de digestión anaerobia y un sistema de supervisión
innovador como lo es la supervisión web, se obtiene un subproducto con un alto
contenido en metano, el cual puede ser aprovechado como fuente energética.
A demás se aborda de forma directa el vacío en el conocimiento que representa la
caracterización del CRB asociada a la construcción de modelos matemáticos de
digestión anaerobia que expliquen la reducción de este biosólido, hecho que
sugiere su implementación para pruebas piloto, que lleven a soluciones de gran
impacto a diversas problemáticas sociales y económicas del país.

21
1.3. Objetivos
1.3.1. Objetivo General
Diseñar un sistema de supervisión, monitoreo y control de las variables
temperatura, presión y tiempo de proceso para un sistema de digestión anaeróbia
de biomasa con contenido ruminal bovino a escala de laboratorio.
1.3.2. Objetivos Específicos
Implementar un sistema de adquisición, supervisión y monitoreo de las
variables temperatura, presión, pH y tiempo para un proceso de digestión
anaeróbia de biomasa con contenido ruminal bovino a escala de
laboratorio.
Identificar un modelo dinámico de las variables temperatura y presión para
el proceso de digestión anaeróbia de biomasa con contenido ruminal bovino
implementado en el laboratorio.
Controlar las variables de temperatura, presión y tiempo del proceso para el
sistema de digestión anaeróbia de biomasa con contenido ruminal bovino a
escala de laboratorio.
22
2. MARCO DE REFERENCIA
2.1. Antecedentes
En las últimas décadas, a nivel mundial se han logrado grandes avances en el
modelamiento, control y monitoreo del proceso de digestión anaerobia como
fuente energética alternativa, sostenible y amigable con el medio ambiente [12].
Los modelos dinámicos tienen por propósito describir de forma acertada el
comportamiento de los sistemas. Dentro de los modelos precursores de
modelamiento asociados a degradación anaerobia se encuentran los propuestos
en 1969 por Laurence y Mc Carty [13], en 1971 por Andrews y Graeff [14], en 1983
por Mosey [15] y en 1986 Moletta et al [16]. Posteriormente, se establece un
enfoque moderno del modelamiento de la digestión anaerobia cuyos contenidos
son aún más descriptivos; cabe destacar los propuestos por Costelo et al en 1991
[17], Ryhinen et al en 1993 [18], Massé y Droste en 1999 [19], Dochain y
Vanrolleghem en 2001 [20]; entre otros. Dada la complejidad del fenómeno de
digestión anaerobia, se han planteado nuevos modelos dinámicos donde se
incorporan variables físicas asociadas a la geometría y diseño propio del reactor, y
bioquímicas que se presentan de forma independiente con relación a cada tipo de
biomasa en degradación.
Es de gran importancia conocer el tipo de reactor implementado, según sus
características físicas y el modo de operación; para este caso particular el diseño
establecido se asemeja a un reactor tipo Batch [1].
En 2004 Sendros realizó un modelamiento y control de temperatura de un reactor
“Batch” para un proceso químico exotérmico, el cual consiste en el análisis
detallado de un reactor tipo batch donde se lleva a cabo una reacción química de
naturaleza exotérmica, con el fin de proponer un modelo dinámico el cual describe
la transferencia de calor en los diferentes subsistemas del proceso y de esta forma
optimizar un control de temperatura ya implementado [1].

23
Magaña et al., en 2006 implementaron un proceso de digestión anaerobia para la
obtención de biogás a partir de excretas de ganado caprino “cabras” en un
biodigestor a escala de laboratorio y teniendo como referencia la cuantificación del
biogás obtenido, establecieron experimentalmente las condiciones óptimas de
temperatura en el rango de 30°C a 40°C dentro del mesófilo [21].
Martínez y Rodríguez en 2007, realizaron el diseño y construcción a escala piloto
de un biodigestor anaerobio de lecho fijo de operación continua con control de
temperatura y pH y establecieron que algunos sustratos de origen pecuario son
más eficientes en el proceso de degradación anaerobia de biomasa [22].
En 2009, Ramón, Carrillo y Vargas estudiaron la instrumentación y variables como
presión y temperatura de proceso en un sistema de biodigestión en fases
separadas, estableciendo que es de gran importancia conocer la instrumentación
que proporcione control y monitoreo óptimos de estas variables de proceso [23].
En 2010, Ramírez teniendo como referencia que cada tipo de biomasa presenta
diferentes características de composición química, caracterizó y comparó el
contenido ruminal bovino y el biogás obtenido con excretas de diferentes animales
de granja; y definió las condiciones adecuadas de temperatura y pH para la
transformación del contenido ruminal bovino en biogás [6].
En 2010, Bermúdez y Díaz implementaron instrumentación industrial para
temperatura y presión en un biodigestor usando como biomasa estiércol animal,
con el fin de analizar el comportamiento dinámico ante un control on – off de
temperatura en el rango mesofilico y un datalogger para el registro de estas
variables [24].
Por otra parte, en 2013, Aguilar estableció un Control de temperatura y pH
aplicado en biodigestores modulares de estructura flexible con reciclado de lodos
a pequeña escala; aunque el diseño de los reactores es muy diferente a los
diseños convencionales, se implementa una tarjeta de adquisición de datos
mediante un microcontrolador PIC 18F4550 y un control difuso de temperatura
24
aplicado a una resistencia eléctrica que desempeña el papel de calentador del
sistema [25].
Finalmente, Marulanda, Barco y Lopez, establecen un trabajo de investigación
cuyo contenido hace referencia al modelo y control inteligente de un reactor
químico; de manera muy general se mencionan las ecuaciones que rigen el
comportamiento de un reactor tipo Batch agregando algunos índices de
desempeño de error, esfuerzo de control y suavidad en el esfuerzo de control [26].
2.2. Marco teórico
2.2.1. Marco legal
La implementación del proceso químico de digestión anaerobia de la biomasa
(CRB), a condiciones específicas, controladas en biodigestores a escala de
laboratorio, sugiere la aplicación de los mismos a gran escala, cumpliendo con las
políticas ambientales establecidas en la CONSTITUCIÓN POLÍTICA DE
COLOMBIA DE 1991, LEY 1665 DEL 16 DE JULIO DE 2013, LEY 1715 DEL 13
DE MAYO DE 2014, DECRETO 1287 DEL 10 DE JULIO DE 2014 y acuerdos
internacionales como el protocolo de KYOTO de la convención marco de las
naciones unidas sobre el cambio climático, en el cual se establece la necesidad de
disminuir las tendencias del deterioro ambiental, contribuir con el desarrollo
económico del país a través de prácticas productivas sostenibles y mitigar las
necesidades de comunidades étnicas, campesinas, afro descendientes y
habitantes en condición de extrema pobreza; situaciones que sumadas al
crecimiento demográfico tienden a empeorar, abriendo cada vez más la brecha de
la desigualdad social en Colombia [27-31].
A demás, de ser implementado el proyecto a gran escala, se cumple con la
reglamentación sanitaria para los mataderos colombianos recopilada en la ley 09
de 1979 y en el decreto 2278 de 1982 y el decreto 1036 de 1991 del Ministerio de
Salud Pública [32].
25
2.2.2. Proceso de digestión anaeróbia
La digestión anaerobia es un proceso bioquímico de degradación de la materia
orgánica en ausencia de oxígeno [33]. Este proceso se lleva a cabo mediante
poblaciones de microorganismos anaerobios que intervienen en el interior de un
reactor químico, también denominado biodigestor, en este se dispone la materia
orgánica en ausencia de oxígeno para que pueda llevarse a cabo una reacción
favorable. La digestión anaerobia representa una alternativa de bajo costo de
manejo de algunos residuos orgánicos. Los residuos que se pueden digerir se
pueden presentar en varios tipos: excretas de animales, residuos de vegetales y
plantas, aguas residuales agroindustriales entre otros [34]. El proceso de digestión
anaerobia se produce en diversos ambientes, ya sean naturales, como los
sistemas gastrointestinales (rumen), los sedimentos marinos, de ríos y lagos, las
fuentes termales o las turberas, o bien en sistemas controlados como los
fermentadores o digestores anaerobios [35].
Como productos principales de este proceso de degradación se pueden obtener:
fertilizante orgánico líquido, fertilizante orgánico lodoso y biogás; además ofrece
enormes ventajas para la transformación de desechos:
Mejora la capacidad fertilizante del estiércol, disminuyendo su agresividad.
El efluente es mucho menos oloroso que el afluente.
Control de microorganismos patógenos.
El biogás obtenido constituye una energía renovable sin emisiones netas de gases
invernadero ni efectos negativos sobre el ambiente. Por el contrario, se considera
un combustible fiable. Las ventajas para el usuario de la tecnología del biogás son
el ahorro económico por el uso de los subproductos (ahorro en combustibles,
disponibilidad de energía para el desarrollo de otras actividades, ahorro en
fertilizantes), menos trabajo y otros beneficios cualitativos (facilidad de cocinar y
mejores condiciones higiénicas, mejor iluminación, independencia energética,
mejora del trabajo de la granja, mejora de la calidad del suelo)[34, 36].
26
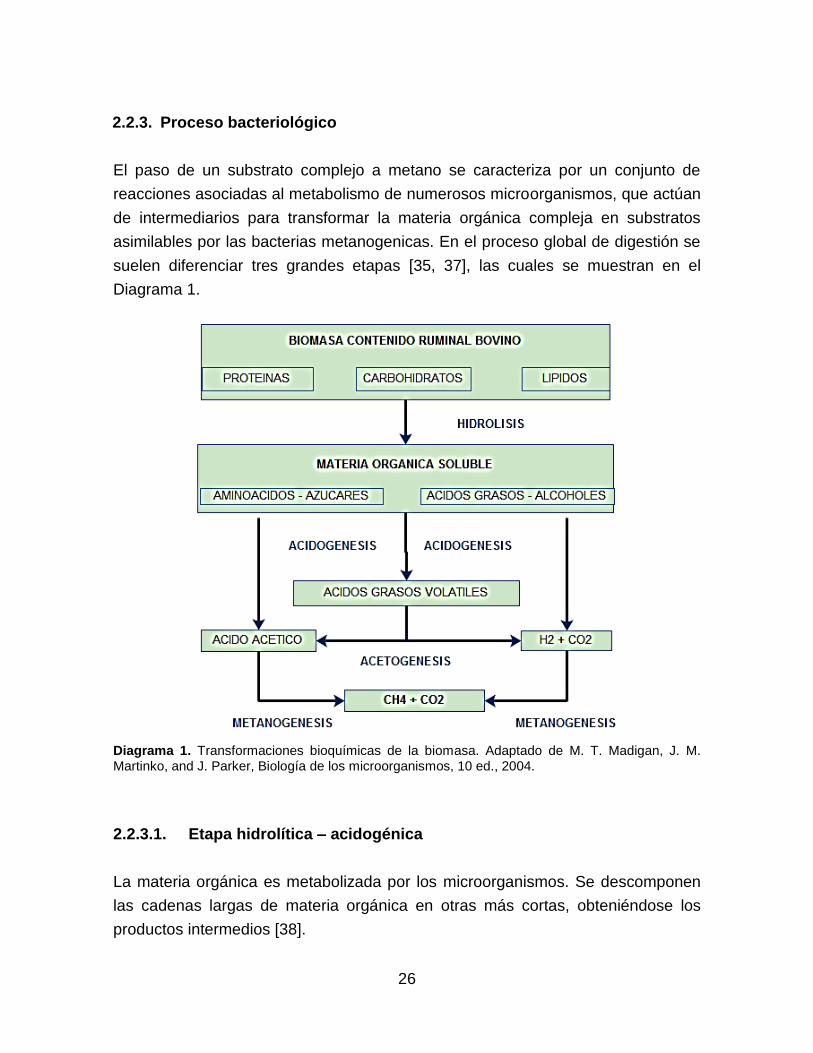
2.2.3. Proceso bacteriológico
El paso de un substrato complejo a metano se caracteriza por un conjunto de
reacciones asociadas al metabolismo de numerosos microorganismos, que actúan
de intermediarios para transformar la materia orgánica compleja en substratos
asimilables por las bacterias metanogenicas. En el proceso global de digestión se
suelen diferenciar tres grandes etapas [35, 37], las cuales se muestran en el
Diagrama 1.
Diagrama 1. Transformaciones bioquímicas de la biomasa. Adaptado de M. T. Madigan, J. M. Martinko, and J. Parker, Biología de los microorganismos, 10 ed., 2004.
2.2.3.1. Etapa hidrolítica – acidogénica
La materia orgánica es metabolizada por los microorganismos. Se descomponen
las cadenas largas de materia orgánica en otras más cortas, obteniéndose los
productos intermedios [38].

27
Por tanto en esta etapa, que se podría resumir como la degradación de la materia
orgánica en ácidos, alcoholes y nuevas células, la eliminación de DQO es mínima
[35].
2.2.3.2. Etapa acetogénica
En la fase de acetogénesis, se metabolizan los productos terminales de la etapa
acidogénica, es decir alcoholes, ácidos grasos volátiles y algunos compuestos
aromáticos que son convertidos en acetato, CO2 e hidrógeno. Así, el metabolismo
acetogénico se caracteriza por una absoluta dependencia de la eliminación de
hidrógeno por las bacterias que lo utilizan como pueden serlo las bacterias
metanogénicas o las sulfatoreductoras en presencia de sulfatos [35].
2.2.3.3. Etapa metanogénica
Constituye la etapa final del proceso, y en ella el acetato, formiato, metanol y
metilaminas son fermentados a metano por las bacterias metanogénicas.
Las tasas de crecimiento de las bacterias metanogénicas son cinco veces
menores que las de la fase anterior por ello serán las que limitarán el proceso de
degradación anaerobia. Serán también las que condicionarán el cálculo del tiempo
de retención del reactor durante la fase de diseño, así como la temperatura de
trabajo [39]. El grupo de bacterias se encuentran de forma simbiótica. Las
productoras de ácido o acidogénicas crean el entorno ideal para el desarrollo de
las bacterias metanogénicas (condiciones anaerobias y cadenas orgánicas
cortas). Las metanogénicas a su vez usan los productos intermedios de las
acidogénicas, que si no fueran consumidos crearían condiciones tóxicas para las
acidogénicas. A la práctica son el grupo de bacterias que producen a la vez la
fermentación anaerobia, sin ser posible que ninguna de ellas independientemente
lleve a cabo todo el proceso [38]. La naturaleza y la composición química del
sustrato condicionan la composición cualitativa de la población bacteriana de cada
etapa, de manera que se establece un equilibrio fácilmente alterable cuando
aparece algún producto tóxico en la entrada. Asimismo, las tasas de conversión
del sustrato en biomasa bacteriana son del orden de 4 veces inferiores a las tasas

28
correspondientes a los sistemas aerobios de eliminación de materia orgánica, lo
cual implica que el proceso anaerobio es, en líneas generales, lento. También se
necesitan varias semanas, incluso uno o dos meses, de puesta en marcha para
conseguir una producción estable de gas [40].
2.2.4. Cinética Química
La cinética química es el estudio de la velocidad y de los diferentes mecanismos
por medio de los cuales un agente químico se transforma en otro. Cuando se
habla de mecanismos de las reacciones químicas, se hace referencia a la
secuencia de un conjunto de eventos químicos individuales cuyo resultado es la
reacción observada [41].
2.2.4.1. Calor de reacción
El calor de reacción se define como la energía absorbida por un sistema cuando
los productos de una reacción se llevan a la misma temperatura que los
reactantes. Para una definición completa de los estados termodinámicos de los
productos y los reactantes, también es necesario especificar la presión. Si se toma
la misma presión para ambos, el calor de reacción es igual al cambio de entalpía;
ésta es la definición más común del calor de reacción. Se puede calcular el calor
de cualquier reacción combinando los calores de formación o los calores de
combustión de los productos y los reactantes. Por tanto, la información básica
necesaria para calcular los calores de reacción son los calores de formación y de
combustión. Existen tablas muy detalladas de este tipo de datos, en la Tabla 1 se
muestran algunos valores para una temperatura de 298 K (25 “C).
Sustancia Formula Estado ΔH -ΔH
Metano CH4 Gas -17889 212800
Etano C2H6 Gas -20236 372820
Propano C3H8 Gas -24820 530600
n-Butano C4H10 Gas -30150 687640
29
n-Pentano C5H12 Gas -35000 845160
n-Hexano C6H14 Gas -39960 1002570
Tabla 1. Calores de formación y combustión para algunos productos químicos. (Calorías por mol gramo). Adaptado de J. M. Smith and A. E. Gómez, Ingeniería de la cinética química: Compañía Editorial Continental, 1968.
2.2.4.2. Ecuación de Arrhenius
El químico sueco Svante Arrhenius, basado en la teoría de la cinética molecular,
observó y explicó que para la gran mayoría de las reacciones químicas, el
aumento de la velocidad de reacción no es lineal con respecto al aumento de la
temperatura.
De esta forma encontró que los datos experimentales correspondientes a las
velocidades de reacción se podían correlacionar mediante la siguiente ecuación.
aE
RTK Ae
(1) 1
Donde K es la constante de velocidad de reacción, Ea es la energía de activación
de la reacción, R es la constante universal de los gases y T es la temperatura de
operación; el termino A o factor pre-exponencial, permanece constante con el
cambio de la temperatura, ya que este está relacionado con el número de
colisiones efectivas entre las moléculas a una determinada energía [42].
2.2.5. Modelamiento De Sistemas
Un sistema representa una unidad donde se hacen tratamientos físicos o químicos
de materiales que puede ser contrastada con un modelo que representa una
descripción matemática del sistema real. La disposición de varios sistemas unidos
entre sí por flujos comunes de materiales y/o información constituye un proceso
[43].
1 Tomada de J. M. Smith and A. E. Gómez, Ingeniería de la cinética química: Compañía Editorial Continental, 1968.
30
El estudio de un proceso, mediante la manipulación de su representación
matemática o de su modelo físico, constituye una simulación. Los estudios
clásicos de un proceso en estado estacionario se complementan con un análisis
dinámico, lo que exige un conocimiento de los criterios de estabilidad y de los
métodos de operación para evaluar exitosamente el funcionamiento del proceso.
2.2.5.1. Tipos de Modelos
La clasificación de los modelos en función del grado de formalismo matemático
que estos poseen es la siguiente:
Modelos mentales, intuitivos o verbales: estos modelos carecen de
formalismo matemático. Para conducir un coche, por ejemplo, se requiere
un modelo mental o intuitivo sobre el efecto que produce el movimiento del
volante, pero no es necesario caracterizar dicho efecto mediante
ecuaciones matemáticas exactas.
Modelos no paramétricos: Muchos sistemas quedan perfectamente
caracterizados mediante un gráfico o tabla que describa sus propiedades
dinámicas mediante un número no finito de parámetros. Por ejemplo, un
sistema lineal queda definido mediante su respuesta al impulso o al
escalón, o bien mediante su respuesta en frecuencia.
Modelos paramétricos o matemáticos: Para aplicaciones más
avanzadas, puede ser necesario utilizar modelos que describen las
relaciones entre las variables del sistema mediante expresiones
matemáticas como puede ser ecuaciones diferenciales (para sistemas
continuos) o en diferencias (para sistemas discretos). En función del tipo de
sistema y de la representación matemática utilizada, los sistemas pueden
clasificarse en:
Dinámicos o estocásticos: Un sistema es estocástico cuando la salida
depende únicamente de la entrada en ese mismo instante (un resistor, por
ejemplo, es un sistema estático). En estos sistemas existe una relación
directa entre entrada y salida, independiente del tiempo. Un sistema
dinámico es aquél en el que las salidas evolucionan con el tiempo tras la
aplicación de una determinada entrada (por ejemplo, una red RC). En estos

31
últimos, para conocer el valor actual de la salida es necesario conocer el
tiempo transcurrido desde la aplicación de la entrada.
Continuos o discretos: Los sistemas continuos trabajan con señales
continuas, y se caracterizan mediante ecuaciones diferenciales. Los
sistemas discretos trabajan con señales muestreadas, y quedan descritos
mediante ecuaciones en diferencias.
2.2.5.2. Método de obtención de modelos
Existen dos métodos principales para obtener el modelo de un sistema:
Modelado Teórico: Se trata de un método analítico, en el que se recurre a
leyes básicas de la física para describir el comportamiento dinámico de un
fenómeno o proceso.
Identificación del sistema: se trata de un método experimental que
permite obtener el modelo de un sistema a partir de datos reales recogidos
de la planta bajo estudio.
2.2.6. Instrumentación
La instrumentación trata las técnicas, recursos y métodos relacionados en la
concepción de dispositivos para mejorar o aumentar la eficacia de los mecanismos
de percepción y comunicación del hombre. La instrumentación comprende dos
campos principales: instrumentación e instrumentación de control. En general, en
el diseño de los sistemas de medida, la atención se centra en el tratamiento de las
señales o magnitudes de entrada, mientras que en los sistemas de control se da
especial importancia al tratamiento de señales de salida. En el primer caso son de
interés los captadores o sensores y transductores, mientras que en el segundo, los
dispositivos más relevantes son los accionadores o actuadores.
2.2.7. Protocolos De Comunicación
2.2.7.1. Protocolo HTTP
32
HTTP (Hypertext Transfer Protocol), es el protocolo de comunicación entre
cualquier navegador o dispositivo con conexión a internet hasta el servidor, que
está alojado en la plataforma de control, permite que el usuario disfrute de una
agradable vista, pues la interfaz es gráfica y no tiene que entender el tedioso
código que esta traduce internamente.
Fue propuesto por Tim Berners-Lee, atendiendo a las necesidades de un sistema
global de distribución de información como el WWW (World Wide Web). Desde el
punto de vista de las comunicaciones, está soportado sobre los servicios de
conexión TCP/IP (Transmission Control Protocol/ Internet Protocol) [44].
El propósito del protocolo HTTP es permitir la transferencia de archivos
(principalmente, en formato HTML). Entre un navegador (el cliente) y un servidor
web (denominado, entre otros, HTTP en equipos UNIX) localizado mediante una
cadena de caracteres denominada dirección URL (uniform resource locator) [45].
2.2.7.2. Protocolo SSH
SSH (Secure Shell), es un protocolo de comunicaciones de ordenes seguras entre
dos sistemas usando una arquitectura cliente/servidor y que permite a los usuarios
conectarse a un host remotamente; SSH encripta la sesión de conexión, haciendo
imposible que alguien pueda obtener contraseñas no encriptadas [46].
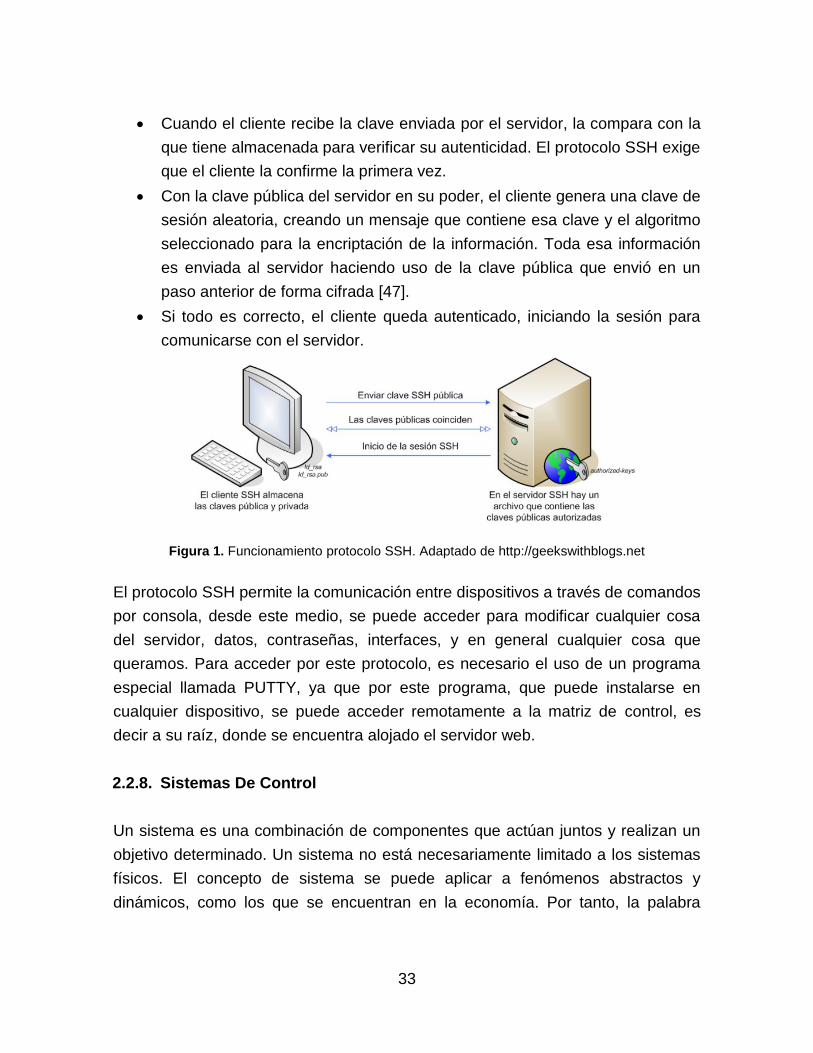
La figura 1 muestra el funcionamiento de este protocolo y se puede resumir de la
siguiente forma:
El cliente inicia una conexión TCP sobre el puerto 22 del servicio. Este
puerto es el que utiliza por defecto el protocolo.
El cliente y el servidor se ponen de acuerdo en la versión del protocolo a
utilizar, así como el algoritmo de cifrado utilizado para el intercambio de la
información.
El servidor, que tiene en su poder dos claves (una privada y una pública),
manda su clave pública al cliente.
33
Cuando el cliente recibe la clave enviada por el servidor, la compara con la
que tiene almacenada para verificar su autenticidad. El protocolo SSH exige
que el cliente la confirme la primera vez.
Con la clave pública del servidor en su poder, el cliente genera una clave de
sesión aleatoria, creando un mensaje que contiene esa clave y el algoritmo
seleccionado para la encriptación de la información. Toda esa información
es enviada al servidor haciendo uso de la clave pública que envió en un
paso anterior de forma cifrada [47].
Si todo es correcto, el cliente queda autenticado, iniciando la sesión para
comunicarse con el servidor.
Figura 1. Funcionamiento protocolo SSH. Adaptado de http://geekswithblogs.net
El protocolo SSH permite la comunicación entre dispositivos a través de comandos
por consola, desde este medio, se puede acceder para modificar cualquier cosa
del servidor, datos, contraseñas, interfaces, y en general cualquier cosa que
queramos. Para acceder por este protocolo, es necesario el uso de un programa
especial llamada PUTTY, ya que por este programa, que puede instalarse en
cualquier dispositivo, se puede acceder remotamente a la matriz de control, es
decir a su raíz, donde se encuentra alojado el servidor web.
2.2.8. Sistemas De Control
Un sistema es una combinación de componentes que actúan juntos y realizan un
objetivo determinado. Un sistema no está necesariamente limitado a los sistemas
físicos. El concepto de sistema se puede aplicar a fenómenos abstractos y
dinámicos, como los que se encuentran en la economía. Por tanto, la palabra

34
sistema debe interpretarse en un sentido amplio que comprenda sistemas físicos,
biológicos, económicos y similares.
Un sistema que mantiene una relación determinada entre la salida y la entrada de
referencia, comparándolas y usando la diferencia como medio de control, se
denomina sistema de control realimentado. Un ejemplo sería el sistema de control
de temperatura de una habitación. Midiendo la temperatura real y comparándola
con la temperatura de referencia (temperatura deseada), el termostato activa o
desactiva el equipo de calefacción o de enfriamiento para asegurar que la
temperatura de la habitación se mantiene en un nivel confortable
independientemente de las condiciones externas.
Los sistemas de control realimentados no se limitan a la ingeniería, sino que
también se encuentran en diversos campos ajenos a ella. Por ejemplo, el cuerpo
humano es un sistema de control realimentado muy avanzado. Tanto la
temperatura corporal como la presión sanguínea se conservan constantes
mediante una realimentación fisiológica. De hecho, la realimentación realiza una
función vital: hace que el cuerpo humano sea relativamente insensible a las
perturbaciones externas, permitiendo que funcione de forma adecuada en un
entorno cambiante.
Los sistemas de control realimentados se denominan también sistemas de control
en lazo cerrado. En la práctica, los términos control realimentado y control en lazo
cerrado se usan indistintamente. En un sistema de control en lazo cerrado, se
alimenta al controlador la señal de error de actuación, que es la diferencia entre la
señal de entrada y la señal de realimentación (que puede ser la propia señal de
salida o una función de la señal de salida y sus derivadas y/o integrales), con el fin
de reducir el error y llevar la salida del sistema a un valor deseado. El término
control en lazo cerrado siempre implica el uso de una acción de control
realimentado para reducir el error del sistema. Los sistemas de control deben
cumplir las siguientes características:
Ser estables y robustos frente a perturbaciones y errores en los modelos.

35
Ser eficiente según un criterio preestablecido evitando comportamientos
bruscos e irreales.
Los elementos básicos que forman parte de un sistema de control y permiten su
manipulación se listan a continuación:
Sensores: son los encargados de conocer el valor real de las variables
medidas en el sistema.
Controlador: con los valores leídos por los sensores y el actual estado del
sistema es capaz de aplicar la acción necesaria para minimizar el máximo
porcentaje el valor de error.
Actuador: es el mecanismo capaz de ejecutar la acción que el controlador
ha calculado y que modifica las variables de control.
2.2.8.1. Controlador PID
Los controladores PID están constituidos por tres acciones básicas de control:
Proporcional (P), integral (I) y derivativa (D). A partir de esto se denominan los
controladores P, I, PI, PD y PID.
2.2.8.2. Acción de control proporcional (P)
Como se observa en la ecuación (2), este ofrece una salida del controlador que es
proporcional a un error acumulado, en consecuencia de esto se entiende que es
un modo de acción lenta.
0
t
ii i
Ku t K e d C s
s (2)
La señal de control u(t) posee un valor diferente de cero cuando la señal del error
e(t) es igual a cero, de esto se concluye que dada una referencia constante, el
error en régimen permanente es cero.
2.2.8.3. Acción de control proporcional-integral (PI)

36
Está definida por la ecuación (3):
0
tp
p
i
Ku t K e t e d
T (3)
Donde Ti se denomina tiempo integral y es el encargado de ajustar la acción
integral, de este modo la función de transferencia resulta según la ecuación (4):
1
1PI p
i
C s KT s
(4)
Con la presencia de un control proporcional, se establece la necesidad de la
existencia de un error que forcé la acción a ser distinta de cero. Con la acción
integral, un error pequeño siempre ofrecerá una acción de control creciente, en el
caso que este sea negativo, la señal de control tiende a ser decreciente.
2.2.8.4. Acción de control proporcional-derivativa (PD)
Está definida por la ecuación (5):
p p d
de tu t K e t K T
dt (5)
Donde td es una constante denominada tiempo derivativo. Esta acción es de
carácter de previsión, lo que establece una acción de control mas rápida. Sin
embargo una desventaja significativa es que este amplifica las perturbaciones
generando eventualmente una saturación en el actuador; la función de
transferencia de un controlador PD es de la siguiente forma: ecuación (6).
PD P p dC s K sK T (6)
Cuando una acción de control derivativa se incorpora a un controlador
proporcional, se genera un controlador con alta sensibilidad, es decir que
corresponde a la velocidad del cambio del error y produce una corrección
significativa cuando el error es demasiado grande.
2.2.8.5. Acción de control proporcional-integral-derivativa (PID)

37
Esta acción reúne las ventajas de las tres acciones de control individuales, la
ecuación de esta acción se obtiene mediante la ecuación (7):
0
tp
p p d
i
K de tu t K e t e d K T
T d t (7)
De esta forma la función de transferencia resulta según la ecuación (8):
1
1PID p d
i
C s K T sT s
(8)

38
3. MATERIALES Y MÉTODOS
3.1. Diseño experimental
Se realizó un diseño experimental para dar respuesta a la pregunta de
investigación y al objetivo propuesto, dicho diseño se encuentra resumido en el
Diagrama 2. La forma procedimental para llevar a cabo el desarrollo de la planta
o ingenio fue la siguiente:
Se adaptó un contenedor como biodigestor.
Se incorporó un instrumental industrial, el cual permitió determinar la
magnitud de las variables temperatura y presión.
Posteriormente, se aplicaron protocolos estandarizados en el laboratorio
tales como: desinfección, esterilización y cargue de la biomasa CRB.
Para garantizar las condiciones previamente establecidas de temperatura,
se incorporó al biodigestor un sistema de calentamiento por baño maría.
Para presión se adaptó una válvula solenoide a una de las conexiones de
proceso del digestor con el fin de aliviar las sobrepresiones generadas en el
proceso de digestión anaerobia de la biomasa.
Posteriormente se diseñó un sistema asociado al control y supervisión de
las variables temperatura y presión del proceso mencionado, con el fin de
identificar un modelo matemático que correlacione el comportamiento de
todo el sistema.
El diseño experimental está conformado por cinco etapas definidas y enfocadas al
cumplimiento de los tres objetivos específicos ya establecidos. Las etapas son:
experimentación, sensores, supervisión, identificación del modelo dinámico y
diseño del controlador. A continuación se explica brevemente cómo se
desarrollaron las etapas.
Etapa 1: experimentación. Se realizaron los procedimientos para la producción
del biogás a partir de la biomasa CRB. Esos procedimientos incluyeron:

39
I. La caracterización de la biomasa que consistió en determinar la densidad,
la humedad, el porcentaje de materia orgánica y el calor especifico de la
biomasa y la mezcla reaccionante; y cuyos resultados son tanto variables
de entrada para su cargue, como parámetros requeridos en el modelo
dinámico del sistema.
II. El acondicionamiento del reactor, cuyo enfoque está definido en realizar un
cargue de biomasa libre de agentes patógenos u otros microorganismos y
la extracción y cuantificación del biogás.
Etapa 2: sensores. Esta etapa implicó la adecuación y procesamiento digital de
los lazos de corriente a partir de los valores análogos entregados por los
transmisores; estos valores fueron determinantes para conocer las condiciones de
presión y temperatura del proceso y para establecer los bloques de control y
supervisión del sistema.
Etapa 3: supervisión. Con el fin de establecer un sistema de supervisión para el
proceso de digestión anaerobia de la biomasa CRB, esta etapa implicó:
I. La adquisición de señales mediante el conversor análogo digital del arduino
un.
II. El procesamiento de información por medio del sistema embebido
Raspberry pi2.
III. La transmisión de información por medio de los protocolos SSH y http.
IV. El monitoreo de las variables temperatura y presión por medio de una
interfaz de servidor web.
Etapa 4: identificación del modelo dinámico. Esta etapa implica la
determinación de un modelo dinámico correspondiente al evento fisicoquímico.
Para conocer el comportamiento de la temperatura y la presión se deben conocer:
I. Los parámetros de caracterización de la biomasa establecidos en la etapa
1.
II. Las leyes de la cinética química como lo son la ecuación de Arrhenius y los
balances de energía en reactores químicos, estableciendo las ecuaciones
diferenciales correspondientes al modelo matemático del proceso.
40
III. Los subsistemas correspondientes al modelo matemático y se simularon a
través de herramientas computacionales, (matlab simulink).
Etapa 5: control de temperatura y presión. a través de esta etapa se
garantizaron las condiciones óptimas de presión y temperatura en el interior del
biodigestor, dada la complejidad que representa linealizar las ecuaciones que
componen el modelo dinámico, se determinaron los algoritmos de control por
medio del proceso de identificación del sistema con ayuda de herramientas
computacionales (sytem identification toolbox y rltool de matlab).

41
Diagrama 2. Representación gráfica del diseño experimental. El diagrama muestra el desarrollo metodológico establecido con el fin de
cumplir con los objetivos propuestos.

42
3.1.1. Modelo experimental
Se partió de un recipiente cilíndrico de acero inoxidable y volumen de 10 litros, con
tapa del mismo material ajustada herméticamente gracias a un empaque de
caucho y 8 pernos. Esta tapa posee tres conectores de proceso (dos de ¼” y uno
de ½”), los cuales se asociaron a la instrumentación. Este conjunto de elementos
se asemejan a la estructura básica de un reactor discontinuo tipo batch, el cual es
relacionado directamente al fenómeno de digestión anaerobia de biomasa,
(Ilustración 1).
Las ventajas de este conjunto de elementos son:
Fácil adaptación al proceso.
Accesibilidad a este recipiente.
Líneas de entrada y salida de proceso.
Materiales ajustados a las necesidades del proceso.
Las desventajas son:
No posee agitador.
Su geometría puede generar perturbaciones al sistema.
No posee sistemas asociados al control del proceso.
Ilustración 1. Modelo experimental. Recipiente cilíndrico en acero inoxidable adaptado como biodigestor, se observa en la parte superior los conectores de proceso asociados a la instrumentación incorporada al sistema.

43
3.1.2. Descripción general del sistema
Teniendo como criterio las características del modelo experimental y el proceso de
digestión anaerobia, se estableció un sistema de control y supervisión para las
variables temperatura y presión. El siguiente diagrama P&ID (Figura 2.) ilustra con
brevedad las características del sistema de digestión anaerobia de biomasa CRB a
escala de laboratorio:
Figura 2. Descripción general del sistema. A. Diagrama P&ID correspondiente al sistema. Se parte del modelo experimental y se adaptan una serie de elementos asociados al control y supervisión del proceso de digestión anaerobia de la biomasa previamente establecida. B. TAG de instrumentación del sistema. Se describen los elementos fijados en el diagrama P&ID, en la primera columna se referencian los elementos correspondientes en el diagrama; en la segunda columna se describe brevemente cada elemento; la tercera columna referencia las siglas de cada elemento correspondientes con la norma ISA 5.1, 5.2 y 5.3.
44
Por medio de un recipiente metálico aislado térmicamente (1), se almacena un
volumen específico de agua que se calienta por medio de una resistencia eléctrica
(2). El agua en contacto con el reactor químico (3) realiza una transferencia de
calor por equilibrio térmico a la biomasa.
En el reactor químico se alojan los transmisores de temperatura (4) y presión (5)
los cuales generan señales análogas en lazos de 4-20mA correspondientes a las
variables temperatura y presión del reactor, estas señales se transmiten en
valores de tensión (1-5v) dependiendo del rango de medida; a los indicadores y
controladores de temperatura y presión (9 y 10 respectivamente), los cuales se
encuentran fuera de la línea de proceso y transmiten ordenes programadas a los
actuadores de temperatura y presión (2 y 6). Por otra parte se hallan dos válvulas
manuales, la válvula (7) se emplea en labores de mantenimiento del actuador de
presión (10), y la válvula (8) en la separación de los lixiviados al final del proceso.
3.2. Experimentación
A partir de la etapa experimental se establecieron una serie de procedimientos
estandarizados en el laboratorio respecto a la caracterización, adecuación, y
disposición de la biomasa; condiciones específicas de asepsia y buen manejo del
reactor antes y durante el proceso; criterios del funcionamiento óptimo del sistema
y metodologías a seguir durante el desarrollo del proyecto.
3.2.1. Densidad
Con el fin de establecer la densidad del CRB se aplicó una técnica gravimétrica,
en la cual mediante el uso de probetas y balanza de brazo, se estableció la masa
neta de CRB para cada muestra, como lo indica la siguiente relación matemática
ecuación (9).
h T pM M M (9)

45
Donde TM corresponde a la masa total medida y pM es la masa de la probeta,
medida previamente. Aplicando la ecuación (10) se obtiene el cálculo de la
densidad del CRB para cada muestra.
hMD
V (10)
3.2.2. Porcentaje de Humedad
En este caso se implementó una balanza analítica donde se compararon las
muestras de biomasa hidratada (estado natural), con las mismas muestras
deshidratadas en el horno a 110 °C. Implementando la ecuación (11), se obtuvo el
porcentaje de humedad de cada muestra.
*100%h dh
h
M MH
M
(11)
3.2.3. Porcentaje de materia orgánica
Cada muestra deshidratada se incineró en una mufla a 600 °C y a través de la
comparación de estas masas incineradas con las masas deshidratadas Figura
3.E., se aplicó la ecuación (12), con el fin de obtener el porcentaje de materia
orgánica de la biomasa CRB.
*100%dh ic
dh
M Mmo
M
(12)
3.2.4. Concentración de la mezcla reactante (BM)
La disolución de ácidos grasos y glucosa, juega un factor predominante en el
proceso de digestión anaerobia de la biomasa [48]. Asumiendo esto se consideró
el CRB un soluto, siendo el agua solvente; se estableció la relación de cantidades

46
soluto – solvente en proporciones (1:1); la concentración de la mezcla a reaccionar
se expresó en términos de peso a volumen a través del cálculo de la densidad de
la mezcla reaccionante como el valor promedio de la densidad del CRB y la
densidad del agua destilada “0.9983 g/ml” (dato obtenido experimentalmente por
método gravimétrico). Posteriormente se establecieron las siguientes relaciones
matemáticas:
Tabla 2. Relaciones matemáticas cálculo de la concentración del reactante.
3.2.5. Calores específicos del CRB y la mezcla reactante
El calor especifico se define como la cantidad de calor (cal) requerido para elevar
en unidad de temperatura (°C) una unidad de masa (g) [49]. Teniendo en cuenta lo
anterior, con la plancha calefactora se suministró la misma cantidad de calor a las
muestras tomadas en el ensayo (ecuación 13), cuyas masas y temperaturas
iniciales (T0) fueron equivalentes entre sí; y se procedió a medir las respectivas
variaciones de temperatura.
Posteriormente se aplicaron las relaciones matemáticas expresadas en las
ecuaciones (15-17); para la mezcla reactante se estableció la misma relación de
las proporciones 1-1.
2H O CRBQ Q (13)
280H O CRBm m g
(14)
21H O
calC
g C
(13

47
5)
0( t) T T (146)
2 2H O H O CRB CRB* *( t) * *( t)C m C m (157)
2 2H O H O
CRB
CRB
C *m*( t)
m*( t)C
(16
8)
2H O
CRB
CRB
( t)
( t)C
(17
9)
2H O
BM
( t)
( t)BMC
(20)
3.2.6. Desinfección y esterilización del biodigestor
Los hipocloritos son los desinfectantes más ampliamente utilizados de los
compuestos clorados, están disponibles como líquidos (hipoclorito de sodio) o
sólidos (hipoclorito de calcio). Tienen un amplio espectro de actividad
antimicrobiana, no dejan residuos tóxicos, no son afectados por la dureza del
agua, son de bajo costo y de acción rápida, remueven los microorganismos y los
biofilms secos o fijados en las superficies y tienen una incidencia baja de toxicidad.
Por otra parte el mecanismo de acción de los alcoholes es la desnaturalización de
las proteínas de los microorganismos. La desnaturalización proteica solo es
posible en presencia de agua; por este motivo el alcohol absoluto presenta un
poder bactericida mucho menor que las mezclas de alcoholes con agua. Este
Podría tener cierta acción bacteriostática al inhibir la producción de metabolitos

48
esenciales para la división celular rápida. Tiene acción bactericida pero poco
efecto residual y presenta un inicio de acción retardado; por este motivo se
debería dejar actuar dos minutos antes de cualquier procedimiento [50].
Establecer protocolos de desinfección y esterilización en el acondicionamiento del
reactor químico garantiza que los resultados sean consecuencia de una
variabilidad biológica presente en el proceso de digestión anaerobia, minimizando
las posibles variabilidades técnicas generalmente presentadas por malos
procedimientos en la eliminación de vectores biológicos y químicos. En la Figura
3.A. se muestra el diagrama de bloques representando la secuencia de cómo se
desarrolló el protocolo de desinfección y esterilización. El cual se describe en el
Anexo 1 (Protocolo de desinfección y esterilización).
3.2.7. Cargue de la biomasa
Realizar el cargue de la biomasa por medio de un protocolo reduce la posibilidad
de distorsionar la salida del producto y se enfoca a hacer una estandarización del
proceso, favoreciendo la reproducibilidad y réplicas de este; en la Figura 3.B. se
identifica el diagrama respectivo al procedimiento establecido en el cargue de la
biomasa; el procedimiento se describe con detalle en el Anexo 2 (Protocolo del
cargue de la biomasa).
3.2.8. Extracción y cuantificación del biogás
En la Figura 3.C. se expresa el diagrama con el procedimiento de extracción y
cuantificación del biogás obtenido en el proceso de digestión anaerobia de
biomasa CRB; el procedimiento se describe con detalle en el Anexo 3 (Protocolo
de extracción y cuantificación del biogás).
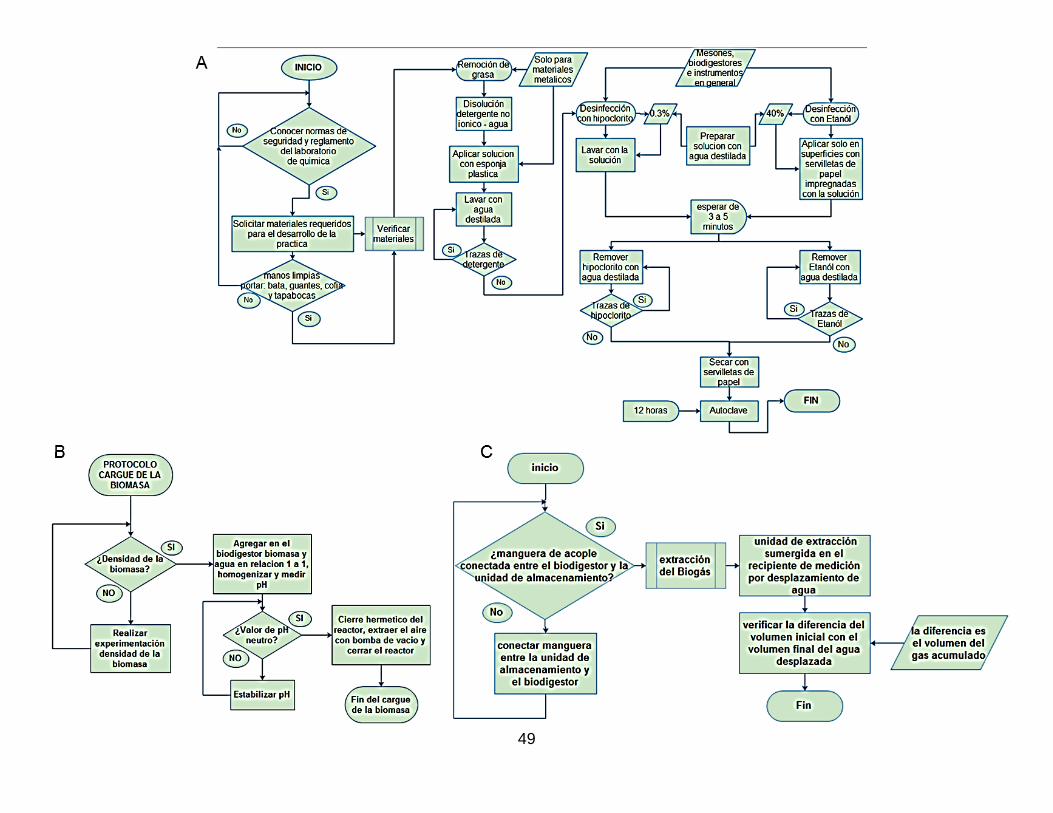
49
50
Figura 3. Protocolos estandarizados en el laboratorio. A. diagrama desinfección y esterilización. B.
Diagrama cargue de la biomasa en el interior del biodigestor. C. Diagrama extracción y
cuantificación del biogás obtenido durante el proceso. Cada diagrama expresa el
acondicionamiento realizado en el reactor, biomasa y gas extraído.
3.2.9. Medición y control de pH
El pH es una de las variables de vital importancia en el proceso bioquímico ya que
esta regula la coexistencia de las poblaciones microbianas presentes en la
degradación de la biomasa; consecuencia de esto, un eventual descontrol del pH
afecta directamente la estabilidad de todo el proceso. Sin embargo para el caso
del CRB, la medición y el control del pH se efectuó solo una vez, posterior al
cargue de la biomasa y antes de sellar herméticamente el biodigestor; asegurar la
neutralidad del pH de la biomasa como condición inicial, garantizó la estabilidad de
este a lo largo del proceso.
Con base en la medición inicial del pH de la biomasa se procedió a estabilizarlo,
usando compuestos bases como hidróxido de sodio e hidróxido de potasio; y un
compuesto acido como ácido clorhídrico, llevando el pH del CRB a un valor
establecido en un rango que va de 6.5 a 7.5, siendo 7.0 el valor óptimo (Ilustración
2).
Ilustración 2. Medición y control del pH, establecer un valor de pH neutro como condición inicial garantiza la estabilidad de este a lo largo del proceso, el pH se estabilizó con sustancias básicas (hidróxido de sodio e hidróxido de potasio) y una sustancia acida (ácido clorhídrico).
3.2.10. Tiempo de retención de la biomasa asociado al tiempo de
proceso
Una de las principales características de los sistemas de digestión anaerobia es la
baja tasa de crecimiento de los microorganismos asociados [51]. Un experimento

51
de biodigestión anaerobia puede tener un tiempo de retención de la biomasa que
oscila entre 30 y 80 días; dada la naturaleza no lineal de los procesos biológicos y
puesto que el sistema objeto de estudio en esta tesis ofrece una respuesta lenta,
no es factible incorporar a el sistema un control de tiempo de retención de la
biomasa, de acuerdo con esto, se estandarizó un tiempo de proceso de 37 días
para cada experimento realizado. Y se procedió a desactivar el sistema de forma
automática transcurridos estos 37 días mediante la incorporación de un relé y un
sistema de medición del tiempo de referencia DS1307 al modelo experimental,
este dispositivo externo se conectó a la tarjeta arduino uno a través de una
comunicación I2C; el relé abre el circuito de la alimentación de la resistencia
calefactora, dando por finalizado el experimento.
Anexo 11 (segmento código control de tiempo de proceso).
3.3. Sensores y actuadores
En el biodigestor se implementaron dos tipos de transmisores, uno de temperatura
(Pt100) y otro de presión (YB 131), en estos la respuesta siempre corresponde a
un lazo de corriente de 4 - 20mA dependiendo del rango de operación de cada
transmisor.
Sin embargo para fines prácticos fue de gran conveniencia establecer una relación
de la respuesta de los transmisores en voltaje, limitar el rango de operación y
acoplar directamente a la tarjeta de adquisición de datos y control la cual se
encargó de recibir las señales análogas, digitalizarlas, procesarlas y mediante
algoritmos de control, transmitir las ordenes a los actuadores los cuales
estabilizaron las variables temperatura y presión en el proceso de digestión
anaerobia de biomasa CRB a escala de laboratorio.
3.3.1. Transmisor de temperatura PT100
Un Pt100, sensor de temperatura. Consiste en un alambre de platino que a 0 °C
con 100 ohms de resistencia eléctrica con comportamiento exponencial y
coeficiente positivo de crecimiento resistivo, (al aumentar la temperatura aumenta
su resistencia eléctrica) Figura 4.C. El incremento de la resistencia no es lineal

52
pero si creciente y característico del platino de tal forma, que a través de tablas
características (Figura 4.B) del transmisor fue posible encontrar la temperatura
exacta correspondiente.
Normalmente las Pt100 industriales se consiguen encapsuladas en la misma
forma que las termocuplas, es decir dentro de un tubo de acero inoxidable ú otro
material (vaina), en un extremo está el elemento sensible (alambre de platino) y en
el otro está el terminal eléctrico de los cables protegido dentro de una caja
redonda de aluminio (cabezal) (Figura 4.A). A continuación se mencionan algunas
ventajas por las cuales se decidió implementar el transmisor de temperatura
PT100.
Ventajas
Los Pt100 son levemente más costosos y mecánicamente no tan rígidos
como las termocuplas, sin embargo la PT100 supera a las termocuplas
especialmente en aplicaciones cuyos rangos de temperatura son bajos.
Los Pt100 pueden entregar precisiones de una décima de grado con la
ventaja que la Pt100 no se descompone gradualmente entregando lecturas
erróneas, si no que normalmente se abre, con lo cual el dispositivo medidor
detecta inmediatamente la falla del sensor y da aviso.
Además la Pt100 puede ser colocada a cierta distancia del medidor sin
mayor problema (30 metros aproximadamente en dependencia de la
resistividad del hilo conductor) utilizando cable de cobre convencional para
hacer la extensión.

53
Figura 4. Características e ilustraciones del transmisor de temperatura PT100. A. Ilustración del transmisor de temperatura PT100. B. Tabla característica de respuesta del transmisor PT100, °C VS Onh. C. grafica generada de la tabla B. D. Ilustración del acondicionador transmisor de temperatura implementado para el PT100.
3.3.2. Transmisor de presión YB131
Es un transmisor de presión para la medición de sobrepresión, presión absoluta o
vacío. Sus medios de medición son gases, vapores y líquidos. El criterio de
selección de este transmisor para el proceso de digestión anaerobia de biomasa

54
CRB, se basa directamente en el principio de funcionamiento y la aplicación del
sensor para gas (Figura 5.B).
Principio de funcionamiento
El elemento sensor es una celda de medida con membrana cerámica
robusta.
La presión del proceso provoca una variación de la capacidad en la celda
de medida a través de la membrana.
La altura de llenado determinada de esta forma, se transforma en una señal
de salida correspondiente y emitida como valor de medición.
Este transmisor de presión ofrece una respuesta de 4-20mA asociados con la
presión de proceso. No son necesarios otros ajustes.
3.3.3. Electroválvula PDI 01044
El actuador implementado en el control de presión del sistema de digestión
anaerobia de biomasa CRB es la electroválvula PDI 01044, la cual conmuta a
110VAC (Figura 5 .C) y ofrece las siguientes características en su aplicación para
gas:
Cuerpo en acero inoxidable.
Acción directa.
Normalmente cerrada.
Regreso resorte.
Libres de mantenimiento.
Bobina con conector DIN.

55
Figura 5. Transmisor de presión, acondicionamiento y actuadores. A. Esquemático configuración lazo de 4-20mA a 1-5 V. B. Ilustración transmisor de presión YB131. C. Ilustración electroválvula PDI 01044 de aplicación para gas. D. Ilustración resistencia de calentamiento.
3.3.4. Tratamiento de los lazos de corriente
3.3.4.1. Linealización del transmisor de temperatura
Como se evidenció la PT100 no ofrece una respuesta lineal, por este motivo se
implementó un acondicionador transmisor de temperatura, que con una
alimentación de 24VDC, ofrece una respuesta en corriente 4-20mA lineal en un
rango de medición de 0-400°C (Figura 4.D).
3.3.4.2. Adecuación del voltaje de los lazos de corriente
Antes de enviar las señales correspondientes a los lazos de corriente (obtenidos
de cada transmisor), a la tarjeta de adquisición de datos, se implementó una
resistencia de precisión de 254Ω (para cada lazo de corriente), la cual se encargó
de convertir esta corriente de salida del transmisor en voltaje, bajo la relación
matemática expresada en la ecuación (21) (Ley de Ohm):

56
R RV I *R (218)
Asumiendo que los valores máximos y mínimos de corriente de salida van de 4mA
(0°C) a 20mA (400°C), y el valor de R (254 Ω) (Figura 5.A), se calcularon los
valores máximos y mínimos de voltaje en la resistencia, ecuación (22):
R m nimo
R m ximo
V 4 mA * 254 1.016 V
V 20 mA * 254 5.08 V
í
á
Ω=
Ω= (22)
Es decir, que el rango del voltaje en el conversor análogo digital del arduino
obedece a un conjunto de valores que varían linealmente entre 1.016V y 5.08V
respecto a la temperatura del biodigestor.
3.3.4.3. Recepción de datos arduino
El modulo conversor análogo digital del arduino posee una resolución de 10 bits y
un voltaje de referencia de 5V, a partir de estas características fue posible hallar la
resolución del ADC, mediante la operación matemática expresada en la ecuación
(23):
ReRe
2
f
n
vsolución (23)
Para este caso, el voltaje que entrega el transmisor llega hasta 5.08V, por lo tanto
se toma esta medida como referencia, aunque puede llegar a un punto de
saturación el ADC del arduino, es poco probable por las características de la
planta y sus limitaciones de operación. De la ecuación (23) se obtiene la ecuación
(24):
Re1024
5.08 0.0049609375 sol c Vu
Vión (24)
Es decir que por cada 4,9609375 mV en la entrada del ADC se evidenciara un
cambio en la medida del arduino. Ahora para obtener el cambio de medición en el
ADC del arduino por 1V en la medición se realizó la siguiente relación matemática,
ecuaciones (25-26):
57
0.0049609375 1
1.06
V bit
V xbit
(25)
1 *1.06 201.5748 1
0.00496
bit Vxbit bit VADC
V (19
6)
Teniendo en cuenta que por cada voltio entregado por el transmisor, el módulo
análogo digital recibirá un valor de 201.5748, este valor se debe tener en cuenta
ya que el voltaje entregado por los transmisores inicia en 1.016V (ó 201.5748 bit),
valor que debe ser restado en el procesamiento de los datos.
3.3.4.4. Tratamiento de los valores obtenidos
Como los sensores implementados manejan el mismo esquema de lazo de
corriente mencionado, es similar el tratamiento de los datos recibidos. En los
siguientes apartados, se explica el manejo que se le dio a los datos para cada
transmisor.
3.3.5. Transmisor de temperatura
Para obtener la razón de cambio del voltaje respecto a la temperatura, se aplicó la
ecuación (27):
5.08 1.016
400 0
Vmaximo Vminimo V VRazondecambioT
Tmaxima Tminima C C
(20
7)
0.01016 /RazóndecambioT V C
Con base en este cálculo, se sabe que por cada 10.16 mV entregados por el
sensor, la temperatura aumentó en 1°C, pero este dato se debe obtener
digitalizado en la escala manejada de 10 bits, por este motivo se realiza la regla de
tres para hallar la “razón de cambio T digital”, ecuación (28):
0.00496 1
0.01016
V bit
V xbit

58
1 *0.01016 2.048
0.00496
bit Vxbit bit RazóndecambioT digital
V (21
8)
Posteriormente se planteó la ecuación (29) para obtener el valor digital
correspondiente a la temperatura establecida en el arduino:
1 201.5748
2.048
VentradaADC VADC VentradaADC bitTdigital
RazóndecambioT bit
(22
9)
3.3.6. Transmisor de presión
Para obtener la razón de cambio del voltaje respecto a la temperatura, se aplicó la
ecuación (30):
5.08 1.016 Re
58.0151 0
Re 0.07005 /
V Vsolución P
psi psi
solución P V psi
(30)
Después de este cálculo, se sabe que por cada 70.05 mV entregados por el
sensor, la presión habrá aumentado en 1psi, pero este dato se debe obtener
digitalizado en la escala manejada de 10 bits, por este motivo se realiza la regla de
tres, pero ahora para hallar la “razón de cambio P digital”:
0.00496 1
0.07005
V bit
V xbit
1 *0.07005 14.12046
0.00496
bit Vxbit bit RazóndecambioPdigital
V (31)
Mediante la ecuación (32) se obtuvo el valor digital correspondiente a la presión:
1 201.5748
14.12046
VentradaADC VADC VentradaADC bitPdigital
RazóndecambioP bit
(32
3)
Las ecuaciones (29) y (32) se programaron para tener un valor digitalizado de
temperatura y presión y de esta manera poder implementar acciones basicas de
control.
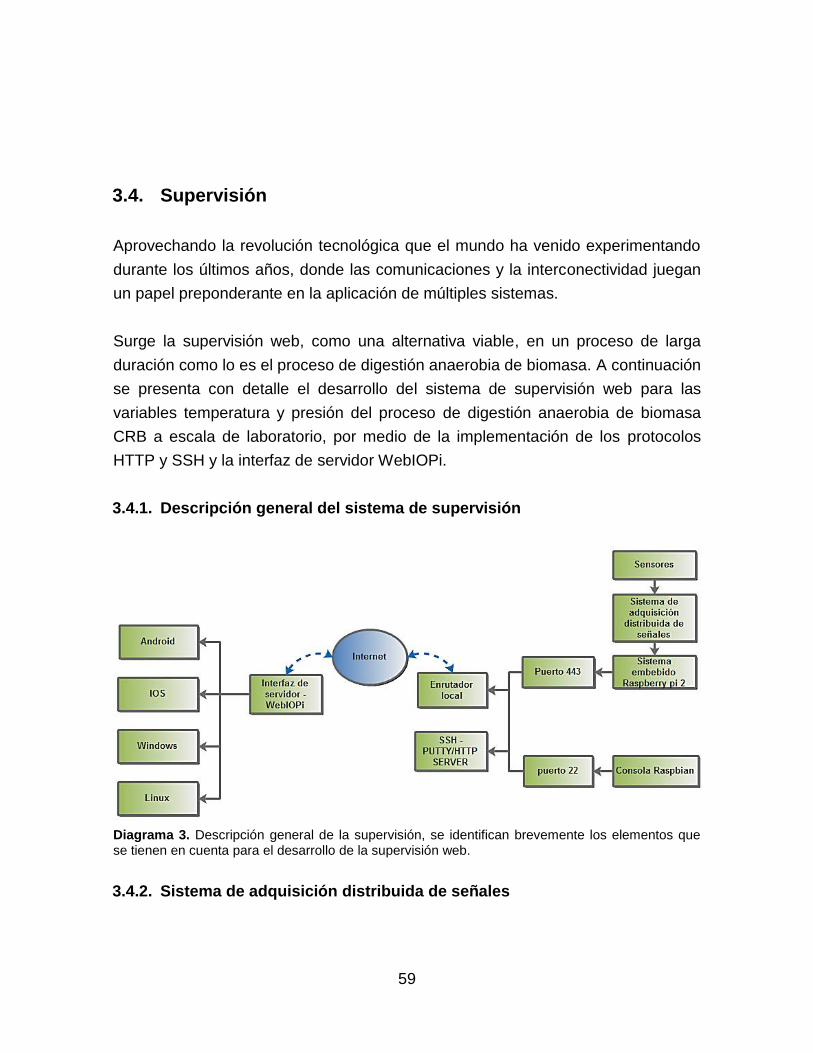
59
3.4. Supervisión
Aprovechando la revolución tecnológica que el mundo ha venido experimentando
durante los últimos años, donde las comunicaciones y la interconectividad juegan
un papel preponderante en la aplicación de múltiples sistemas.
Surge la supervisión web, como una alternativa viable, en un proceso de larga
duración como lo es el proceso de digestión anaerobia de biomasa. A continuación
se presenta con detalle el desarrollo del sistema de supervisión web para las
variables temperatura y presión del proceso de digestión anaerobia de biomasa
CRB a escala de laboratorio, por medio de la implementación de los protocolos
HTTP y SSH y la interfaz de servidor WebIOPi.
3.4.1. Descripción general del sistema de supervisión
Diagrama 3. Descripción general de la supervisión, se identifican brevemente los elementos que se tienen en cuenta para el desarrollo de la supervisión web.
3.4.2. Sistema de adquisición distribuida de señales

60
Puesto que la Raspberry pi2 no posee conversores análogos digitales, se deben
incorporar módulos externos asociados al fin de obtener los datos de los sensores,
para ello se implementó el modulo conversor análogo digital del Arduino Uno y a
través del protocolo USB (Universal Serial Bus) se estableció una comunicación
con la Raspberry pi2 o elemento procesador – servidor web, ANEXO 4 (código de
adquisición y transmisión), ANEXO 5 (Especificaciones arduino Uno).
3.4.3. Instalación y configuración de Raspbian
3.4.3.1. Instalación de Raspbian
Requisito: memoria micro SD, mínimo 2Gb.
Se descargó Raspbian de la página oficial de Raspberry pi, además del
programa “Win32 Disk imager”, el cual permitió introducir el sistema
operativo en una memoria SD (Figura 6.A).
Después de instalar y ejecutar Win32 Disk imager, se procedió con la
instalación del sistema operativo.
Se accedió a la ubicación de la imagen de Raspbian, descargada con
anterioridad.
Pulsando en la opción Write, se procedió con la instalación de Raspbian,
este proceso suele tardar algunos minutos, dependiendo del rendimiento
del computador.
Posterior a la instalación del sistema operativo, se insertó la memoria micro
SD en la ranura correspondiente de la Raspberry pi2.
Es necesario conectar la Raspberry pi2 a través del puerto HDMI a un tv o
monitor, además, de conectar un teclado, un mouse y una fuente de 5
voltios preferiblemente a 2 Amperios.
3.4.3.2. Configuración de Raspbian
Una vez puesta en marcha la Raspberry pi2 por primer vez, esta carga
controladores además se comprueban todos los componentes en la matriz de
Raspbian, antes de iniciar la configuración general, Figura 6. B. La primera opción
de esta configuración del sistema, básicamente consiste en redimensionar la
61
memoria SD, con el fin de optimizar el espacio de los archivos y aplicaciones
Figura 6. C.
Cambiar usuario y contraseña: generalmente la raspberry tiene un usuario y
contraseña establecidos por defecto
Usuario: pi
Password: Raspberry
Sin embargo, a través de esta opción (Figura 6. D); se pueden el cambiar usuario
y contraseña; para efectos de seguridad, es recomendable cambiar la contraseña,
y tenerla en cuenta en el momento de iniciar sesión SSH.
Internacionalización y opciones de idioma: Mediante esta opción se configura
todo lo relacionado con ubicación geográfica, idioma del sistema, zona y formato
horario, así como el idioma y los caracteres del teclado (Figura 6.E).
Salir de la configuración del sistema: Estableciendo la configuración pertinente
y finalizando con la opción “abortar configuración de Raspbian” (Figura 6 F), el
sistema se reinicia y se efectúan todos los cambios realizados.

62

63
Figura 6. Instalación y configuración de Raspbian. A. Ilustración instalación de Raspbian,
procedimiento con el programa Win32 Disk Imager, el cual permite grabar la imagen de Raspbian
en una memoria SD. B. Ilustración consola de Raspbian cargando controladores del sistema. C.
Ilustración configuración de Raspbian, redimensionamiento de la memoria del sistema. D.
Ilustración configuración de Raspbian, cambiar usuario y contraseña. E. Ilustración configuración
de Raspbian, opciones de idioma y región. F. Ilustración salir de configuración de Raspbian. G.
Ilustración entorno del escritorio de Raspbian.
3.4.4. Conexión de la Raspberry pi2 a través del protocolo SSH
Tener acceso a la Raspberry Pi2, mediante el uso del protocolo SSH, agiliza de
forma significativa el trabajo, de instalar y configurar las aplicaciones, sin la
dependencia de estar conectado a un TV o monitor.
Para proceder con una conexión de acceso remoto primero se identificó la
dirección IP local, la cual se encuentra asignada en la Raspberry Pi2. El programa
Advance IP Scan, agilizó de forma significativa la identificación de la dirección IP
local.
3.4.4.1. PUTTY Y SU CONFIGURACIÓN
PuTTY es un cliente de red que soporta los protocolos SSH, Telnet y Rlogin y
sirve principalmente para iniciar una sesión remota con otra máquina o servidor.
Es de licencia libre y está diseñado y mantenido principalmente por Simon Tatham
desde Gran Bretaña. A pesar de su sencillez es muy funcional y configurable [15].
Para configurar PuTTY se realizó el siguiente procedimiento (Ilustración 3):
En la matriz Raspberry Pi2 se asignó una dirección local, con esto nos
aseguramos que podemos acceder a la consola de control siempre sin
necesidad de verificar cual fue la dirección asignada por DHCP (Dynamic
Host Configuration Protocol).
En la selección del puerto colocamos “22”, ya que por estándar
internacional, la comunicación a consola se realiza por protocolo SSH,
también es necesario habilitar el servidor SHell en la Raspberry Pi.

64
Una vez nos conectamos a la matriz, esta nos solicitara un usuario y una
contraseña. Aunque estas opciones son configurables en la matriz de
control (Figura 6.D).
Ilustración 3. Configuración de PUTTY, resaltados en rojo los requerimientos previos a iniciar una sesión SSH con la Raspberry pi2.
3.4.5. Consola y comandos utilizados
La consola es un espacio definido, donde se establecen y ejecutan las órdenes al
sistema. Estas órdenes pueden ser: desde crear una carpeta o archivo, hasta
ejecutar un programa. Cuando la consola es remonta (SSH), es posible enviar
órdenes a una máquina sin la necesidad de estar físicamente delante de ella. Las
órdenes más utilizadas en la consola fueron:
$ ls (lista de archivos y carpetas en el directorio actual).
$ cd carpeta (acceder a carpeta)
$ cd (acceder a directorio)
$ mkdir (crea un directorio)
$ sudo (Ejecución de comando como super usuario (root))
$ reboot (Reinicia el sistema)
$ poweroff (Apaga la Raspberry pi2)

65
3.4.6. WebIOPi
WebIOPI es un framework interfaz web desarrollado específicamente para
Raspberry pi, este establece un control de los pines GPIO de manera local y
remota. A demás permite supervisar los dispositivos que estén conectados a los
GPIO, para este caso fueron los transmisores PT100 y YB131.
3.4.6.1. Instalación de WebIOPi
La instalación de WebIOPi se efectuó mediante las siguientes instrucciones, este
proceso tardó aproximadamente una hora.
$ gethttp://webiopi.googlecode.com/files/WebIOPi-0.6.0.tar.gz (accedió
a la pagina de descarga de la aplicación).
$ tar xvzf WebIOPi-0.6.0.tar.gz (descargó la aplicación).
$ cd WebIOPi-0.6.0 (ubicó la carpeta donde se descargó la aplicación).
$ sudo ./setup.sh (instaló el setup).
Después de instalado el framework, este siempre se ejecuta con la siguiente
instrucción:
$ sudo /etc/init.d/webiopi start
O se detiene con la siguiente instrucción:
$ sudo /etc/init.d/webiopi stop
Para el caso de este proyecto es útil que el framework se ejecute
automáticamente cada vez que se encienda la Raspberry, esto se consiguió con la
siguiente instrucción.
$ sudo update-rc.d webiopi defaults
3.4.6.2. WebIOPi primeros pasos

66
La forma de acceder a webiopi se efectúa a través de un navegador de internet e
introduciendo una URL especifica. Esta URL siempre corresponde a la dirección
IP: y el puerto 8000; para este caso es www.192.168.0.254:8000; se introduce el
usuario (webiopi) y la contraseña (raspberry). De inmediato aparece el menú
principal con las funciones propias de WebIOPi (Figura 7.B). Para el caso de la
supervisión web se aplicó la función Serial monitor, donde se imprimen los valores
obtenidos por el conversor análogo digital, procesados previamente por la
Raspberry (Figura 7.A).
Figura 7. WebIOPi primeros pasos. A. menú principal de WebIOPi, se muestran las funciones propias del servidor web. B. Monitor serie de WebIOPi, función implementada en el desarrollo de la supervisión, el monitor serie muestra los valores obtenidos, procesados y transmitidos por la Raspberry mediante el protocolo HTTP.
La apariencia general de la aplicación inicialmente está sujeta a algunos valores
predeterminados en la configuración de webiopi.
3.4.6.3. Configuración de WebIOPi
Para acceder al archivo de configuración se debe ingresar la siguiente instrucción
a la consola:
$ Sudo nano /etc/webiopi/config
Configuración de directorios

67
Se deben comentar las ubicaciones predefinidas por framework en el script, la
carpeta que contiene el proyecto y el archivo html inicial, posteriormente se
escriben las nuevas ubicaciones respectivamente, como lo ilustra la Figura 8.
Figura 8. Configuración de los directorios predefinidos por webiopi. A. configuración ruta del script predefinido por WebIOPi, es necesario comentar esta línea de código. B. acceso de la nueva ruta de script, correspondiente al script desarrollado e implementado en la supervisión web. C. ruta de la carpeta predefinida por WebIOPi, es necesario comentar esta línea de código. D. acceso de la nueva ruta correspondiente a la carpeta que contiene el proyecto en general. E. nombre del archivo html de inicio, index. Html es un archivo predeterminado por el servidor, es necesario trabajar sobre este archivo reescribiéndolo con el código implementado.
1. Ubicación del script predeterminada por el framework.
2. Nueva ubicación, correspondiente al script desarrollado en este proyecto
(temp.py).
3. Ubicación de la carpeta predeterminada por el framework.
4. Nueva ubicación de la carpeta creada (proyecto).
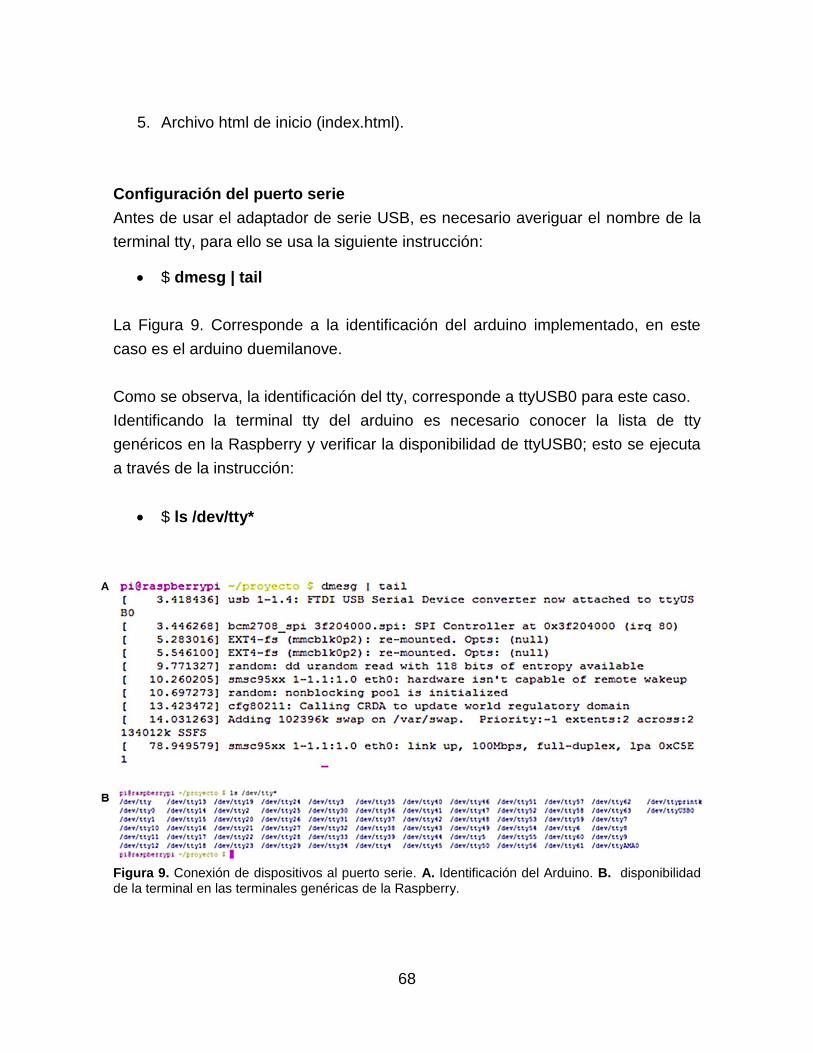
68
5. Archivo html de inicio (index.html).
Configuración del puerto serie
Antes de usar el adaptador de serie USB, es necesario averiguar el nombre de la
terminal tty, para ello se usa la siguiente instrucción:
$ dmesg | tail
La Figura 9. Corresponde a la identificación del arduino implementado, en este
caso es el arduino duemilanove.
Como se observa, la identificación del tty, corresponde a ttyUSB0 para este caso.
Identificando la terminal tty del arduino es necesario conocer la lista de tty
genéricos en la Raspberry y verificar la disponibilidad de ttyUSB0; esto se ejecuta
a través de la instrucción:
$ ls /dev/tty*
Figura 9. Conexión de dispositivos al puerto serie. A. Identificación del Arduino. B. disponibilidad de la terminal en las terminales genéricas de la Raspberry.
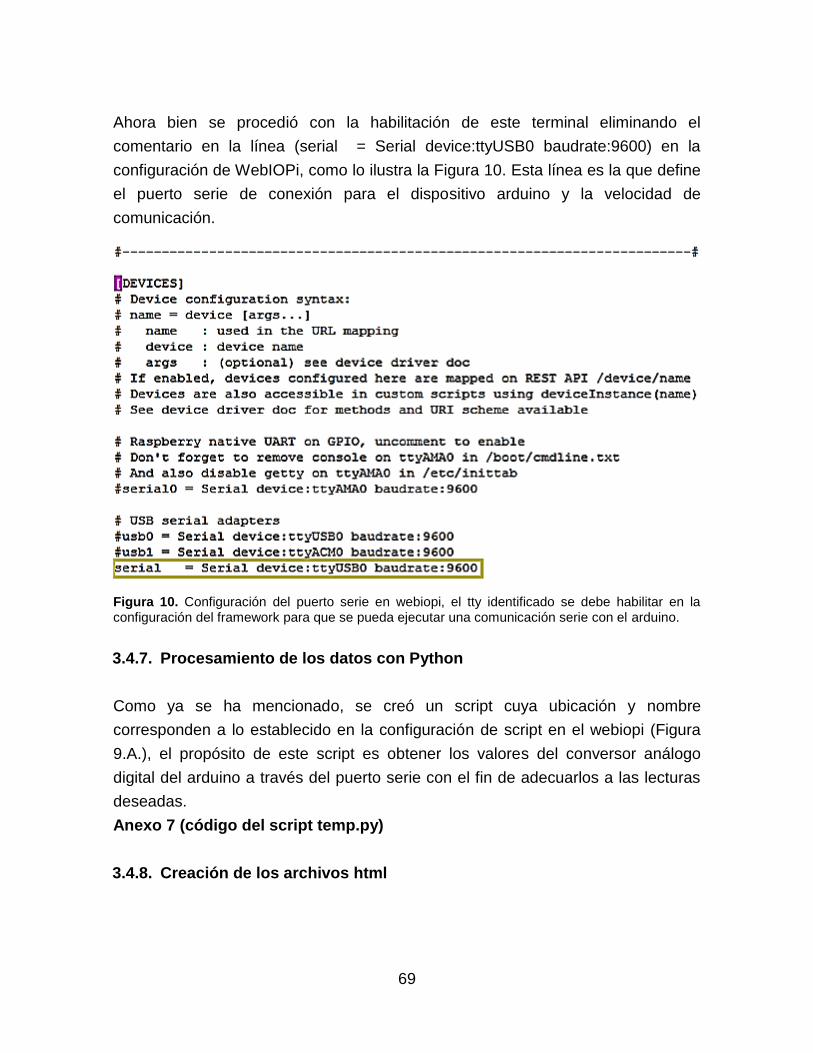
69
Ahora bien se procedió con la habilitación de este terminal eliminando el
comentario en la línea (serial = Serial device:ttyUSB0 baudrate:9600) en la
configuración de WebIOPi, como lo ilustra la Figura 10. Esta línea es la que define
el puerto serie de conexión para el dispositivo arduino y la velocidad de
comunicación.
Figura 10. Configuración del puerto serie en webiopi, el tty identificado se debe habilitar en la configuración del framework para que se pueda ejecutar una comunicación serie con el arduino.
3.4.7. Procesamiento de los datos con Python
Como ya se ha mencionado, se creó un script cuya ubicación y nombre
corresponden a lo establecido en la configuración de script en el webiopi (Figura
9.A.), el propósito de este script es obtener los valores del conversor análogo
digital del arduino a través del puerto serie con el fin de adecuarlos a las lecturas
deseadas.
Anexo 7 (código del script temp.py)
3.4.8. Creación de los archivos html

70
Para este caso se crearon dos archivos: index.html (archivo de inicio) y
temperatura.html (archivo que llama e imprime el script de python en el servidor
web).
Anexo 8 (código del archivo index.html)
Anexo 9 (código del archivo temperatura.html)
3.4.9. Creación del DNS (Domain Name System)
Fue de gran importancia establecer un dominio para la página web creada. Ya que
este garantiza la accesibilidad a la información en cualquier momento, en
cualquier lugar gracias a la asignación de un nombre de dominio, siempre y
cuando el servidor web creado con la Raspberry pi2 y WebIOPi esté en marcha.
En este caso se creó un DNS gratuito de dirección ip dinámica ofrecido por
proveedor de servicios DNSexit (Figura 11).

71
Figura 11. Creación de un dominio gratuito para el servidor web. A. DNSexit, vinculación de dominio con la ip dinámica del servidor. B. confirmación de dominio gratuito DNS.
3.5. Modelo Dinámico
El diagrama 4 describe la metodología desarrollada en la identificación de un
modelo dinámico que corresponde acertadamente con el proceso de digestión
anaerobia de biomasa CRB, efectuado en un biodigestor tipo Batch a escala de
laboratorio.
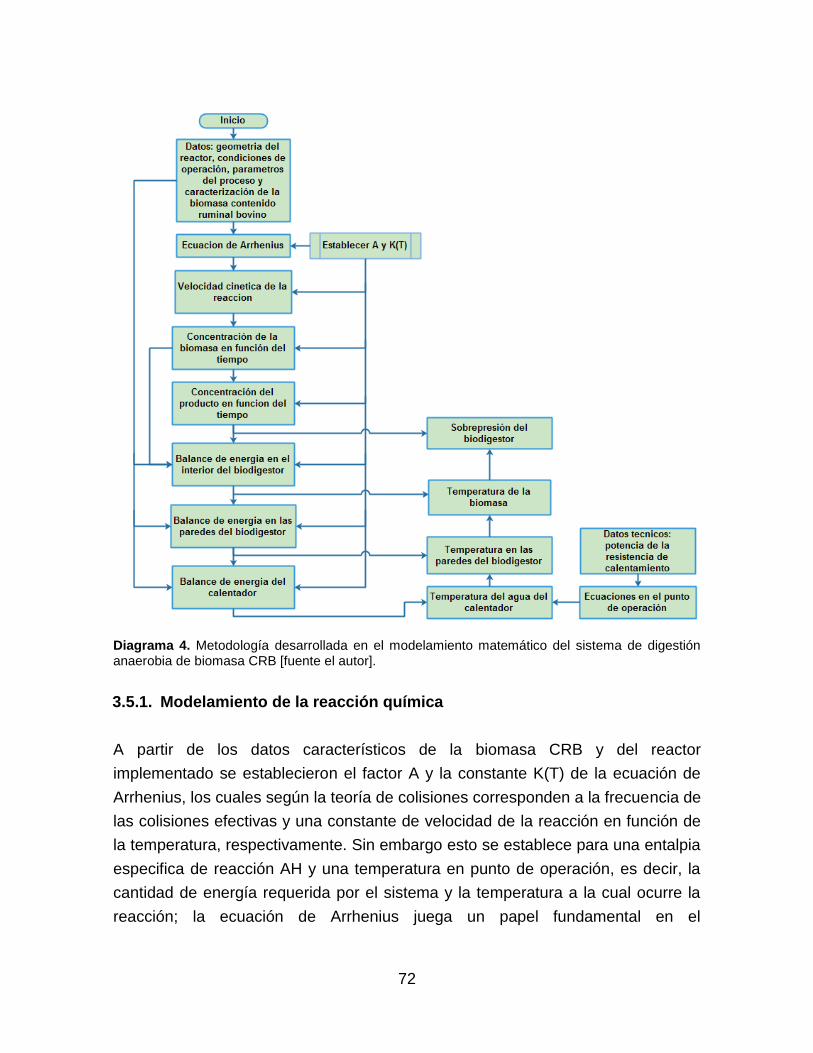
72
Diagrama 4. Metodología desarrollada en el modelamiento matemático del sistema de digestión anaerobia de biomasa CRB [fuente el autor].
3.5.1. Modelamiento de la reacción química
A partir de los datos característicos de la biomasa CRB y del reactor
implementado se establecieron el factor A y la constante K(T) de la ecuación de
Arrhenius, los cuales según la teoría de colisiones corresponden a la frecuencia de
las colisiones efectivas y una constante de velocidad de la reacción en función de
la temperatura, respectivamente. Sin embargo esto se establece para una entalpia
especifica de reacción AH y una temperatura en punto de operación, es decir, la
cantidad de energía requerida por el sistema y la temperatura a la cual ocurre la
reacción; la ecuación de Arrhenius juega un papel fundamental en el

73
modelamiento cinético de reacciones químicas ya que esta describe el
comportamiento de la biomasa independientemente de las perturbaciones que
afecten al sistema.
Estableciendo lo anterior se determinó la velocidad de la reacción la cual afecta de
forma directa la concentración del reactante en este caso la biomasa y la
concentración de un producto compuesto por “n” cantidad de subproductos.
3.5.2. Modelamiento de temperatura
Con el fin de establecer los modelos de temperatura y presión del lugar físico
donde se lleva a cabo la reacción química, fue necesario comprender el
comportamiento del sistema de calentamiento en general, para esto se estableció
una analogía poco convencional pero efectiva con un circuito RC (Diagrama 5).
Diagrama 5. Analogía del circuito térmico con un circuito eléctrico RC.
Donde el Flujo térmico (Q): análogo a la corriente de un circuito eléctrico,
corresponde a la cantidad de calor circulante en el sistema.
Temperatura (T): análogo al voltaje de un circuito eléctrico, corresponde al
potencial térmico presente en el sistema.
Capacitancias térmicas (C): análogas a los capacitores eléctricos, corresponden
a los elementos almacenadores de energía, en este tipo de sistemas son
74
representados por densidades, calores específicos y volúmenes los fluidos
presentes.
Resistencias térmicas (R): análogas a los resistores eléctricos, corresponden a
los elementos que disipan la energía, son representados por coeficientes de
transferencia de calor, calores exotérmicos y áreas de los materiales del reactor y
sistema de calentamiento.
La anterior analogía se usó para comprender con detalle el fenómeno de
transferencia de calor en el sistema, aunque para este caso el sistema no se
modela de la misma forma que un circuito eléctrico puesto que las resistencias
térmicas y las capacitancias térmicas son perturbaciones más complejas y afectan
de forma significativa la reacción química. Asumiendo esto, se optó por establecer
el modelo dinámico teniendo como base los balances de energía para cada uno
de los subsistemas presentes (calentador, paredes del reactor y biomasa).
3.5.3. Modelamiento de la sobrepresión del reactor
Para obtener la presión total del gas confinado en el reactor se aplicó la ley de las
presiones parciales, tomando como referencia la presión del gas metano (CH4) y
el dióxido de carbono (CO2). Debido a que se desprecia la concentración del gas
hidrogeno (H2) ya que es seis ordenes de magnitud menor que el de las demás
[52].
En la implementación del modelo de sobrepresión del reactor se planteó la
ecuación (33) correspondiente a la combustión completa del metano
(33)
Según la estequiometria, la combustión completa del metano consume 2 moles de
O2. Por lo tanto un mol demanda 16x4 gramos de oxigeno
75
3.6. Simulación del modelo matemático
El desarrollo de la simulación correspondiente a la representación el bloques de
las ecuaciones que conforman el modelo identificado previamente, el cual describe
el comportamiento del sistema de digestión anaerobia de biomasa CRB,
implementado en un biodigestor a escala de laboratorio.
La simulación se efectuó mediante el software Matlab®/Simulink® gracias a las
múltiples herramientas que este ofrece respecto a la simulación de ecuaciones
diferenciales, ajuste de condiciones iniciales y entorno grafico flexible.
3.6.1. Bloques implementados y sub sistema parámetros
Todos los bloques implementados en la simulación del modelo se presentan en la
figura 12.A, la forma de agrupar estos bloques se efectúa en subsistemas,
definiendo todas las etiquetas Goto como variables globales Figura 12 B.
Las operaciones básicas se denotan con las etiquetas “sum, product, divide”; las
constantes se denotan con las etiquetas “Gain y Constant” dependiendo de su
aplicación y las funciones matemáticas se denotan con las etiquetas (Math
function e integrator).
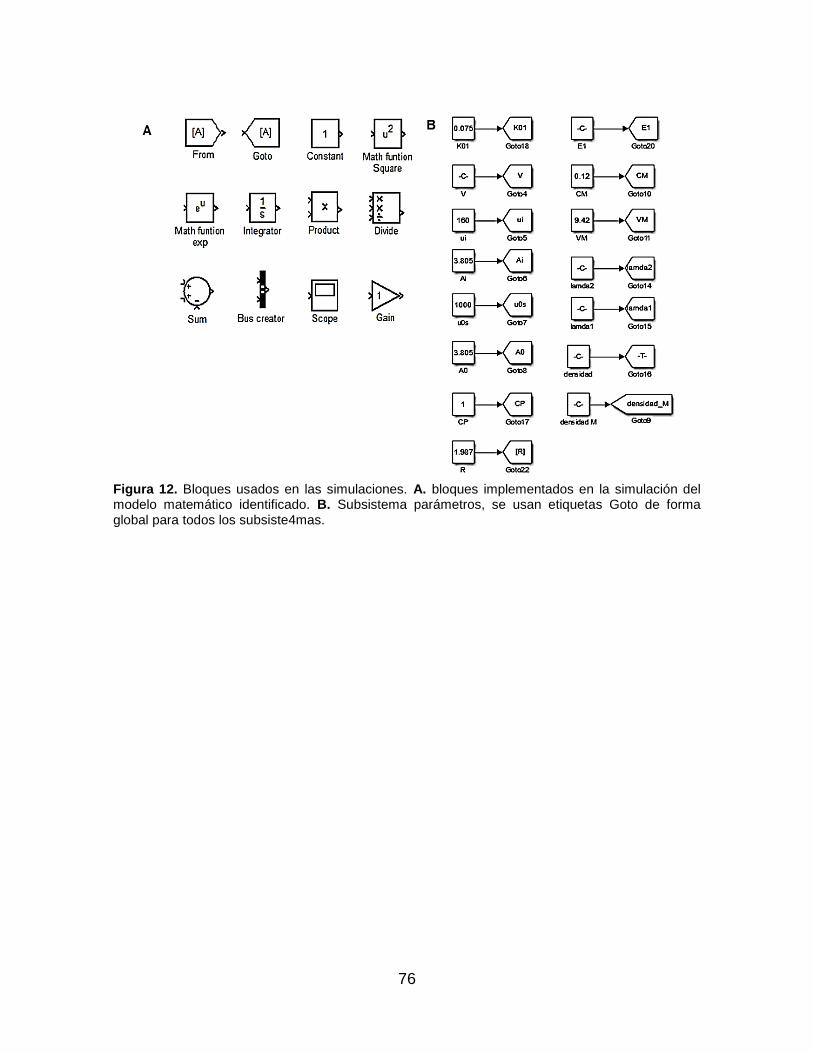
76
Figura 12. Bloques usados en las simulaciones. A. bloques implementados en la simulación del modelo matemático identificado. B. Subsistema parámetros, se usan etiquetas Goto de forma global para todos los subsiste4mas.

77

78
Figura 13. Sub sistemas de la simulación del modelo dinámico. A. Constante cinética de velocidad de la reacción en función de la temperatura. B. Concentraciones reactivo-producto en función del tiempo. C. Temperatura en las paredes del reactor. D. Temperatura de la biomasa en función del tiempo.
3.6.2. Sub sistemas realizados en la simulación
La agrupación de bloques en simulink para el caso del desarrollo de esta tesis,
representa una forma gráfica de escribir las ecuaciones diferenciales que
componen el modelo dinámico, acudiendo a las ventajas de establecer las
condiciones iniciales y realizar las simulaciones respectivas de cada subsistema
que compone el modelo dinámico adaptado para el CRB.
3.7. Control
3.7.1. Identificación de la respuesta en temperatura
Con base en la simulación del modelo matemático obtenido para el sistema de
digestión anaerobia de biomasa CRB y teniendo en cuenta la alta complejidad que
representa linealizar las ecuaciones de este modelo, se procedió a realizar un
proceso de identificación sobre la respuesta del sistema en temperatura.
El proceso de identificación es una fase de gran importancia en el diseño del
controlador ya que esta tiene como propósito determinar un modelo matemático
que reproduzca con suficiente exactitud el comportamiento del proceso. Para este
tipo de planta es suficiente realizar una identificación clásica utilizando el escalón
como señal de prueba, cuya respuesta puede aproximarse a un modelo de primer
orden con o sin retardo y dado que los sistemas térmicos ofrecen una respuesta
monótona creciente sin oscilaciones, se tomó como modelo de referencia un
modelo de primer orden con un retardo que representa el equilibrio térmico
posterior a la fase de calentamiento.
La herramienta System identification toolbox del software matlab, permite construir
modelos matemáticos de un sistema basándose en datos obtenidos. A
continuación se presenta el procedimiento realizado en el proceso de identificación
de la planta:

79
Se generó y exportó un vector correspondiente a la respuesta en
temperatura del sistema, a través del bloque to workspace de simulink
Figura 14.A.
Se copió este vector al workspace, y se crearon dos nuevos vectores con
los datos deseados; en este caso un vector con los valores de salida de
temperatura y otro con una entrada escalón. Figura 14.B.
Con la herramienta System identification toolbox de matlab se importaron
los vectores creados con las opciónes: import y time domain data. Figura
14.C.
Mediante la opción Estimate, se seleccionó el método de identificación del
sistema de temperatura. Figura 14.D.
Posteriormente se obtuvo la función de transferencia correspondiente a la
identificación.
3.7.2. Diseño del controlador
Una vez realizada la identificación de la planta se aplicó una técnica empírica de
sintonización de parámetros del controlador (reglas de Zieglen-Nichols); como el
error en régimen permanente requerido ante la señal escalón es cero, se elegirá
una acción de control PI. Los parámetros del controlador se calcularon siguiendo
la tabla 3.
Kp TI TD
PI
Tabla 3. Valores de los parámetros del controlador según Ziegler-Nichols.
Posteriormente se aplicó la herramienta rltool de matlab para el diseño del
controlador por el método del lugar geométrico de las raíces (Figura 15).
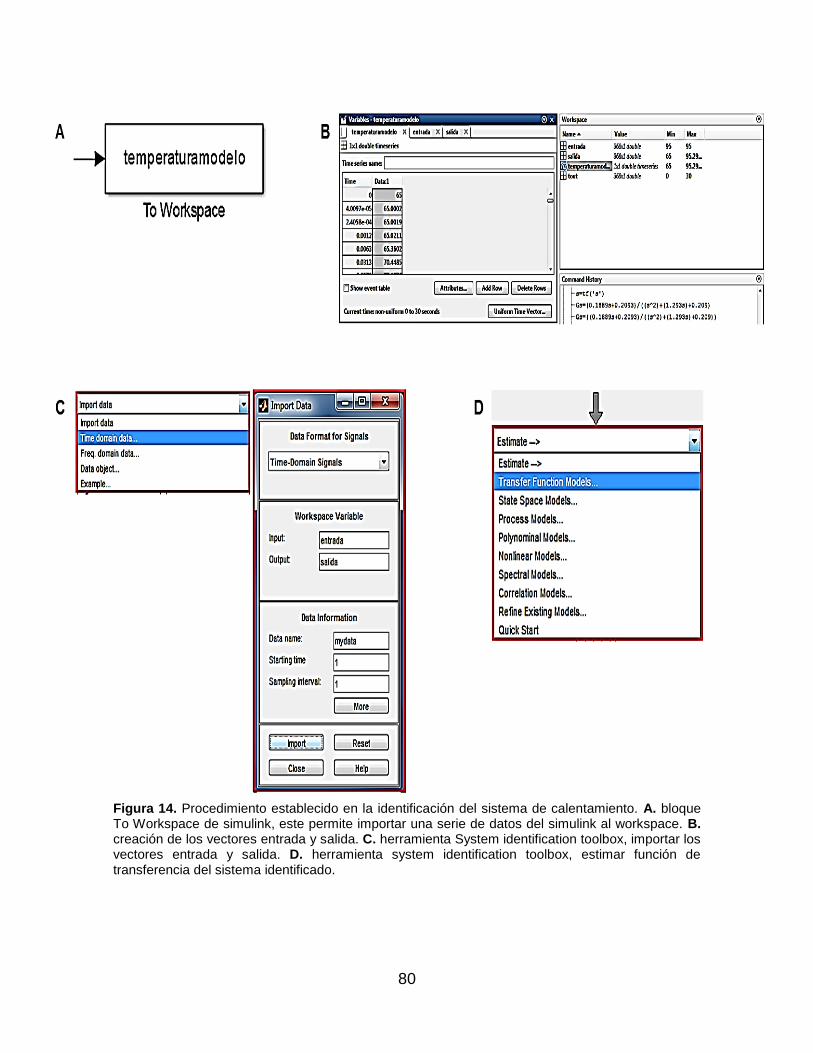
80
Figura 14. Procedimiento establecido en la identificación del sistema de calentamiento. A. bloque To Workspace de simulink, este permite importar una serie de datos del simulink al workspace. B. creación de los vectores entrada y salida. C. herramienta System identification toolbox, importar los vectores entrada y salida. D. herramienta system identification toolbox, estimar función de transferencia del sistema identificado.
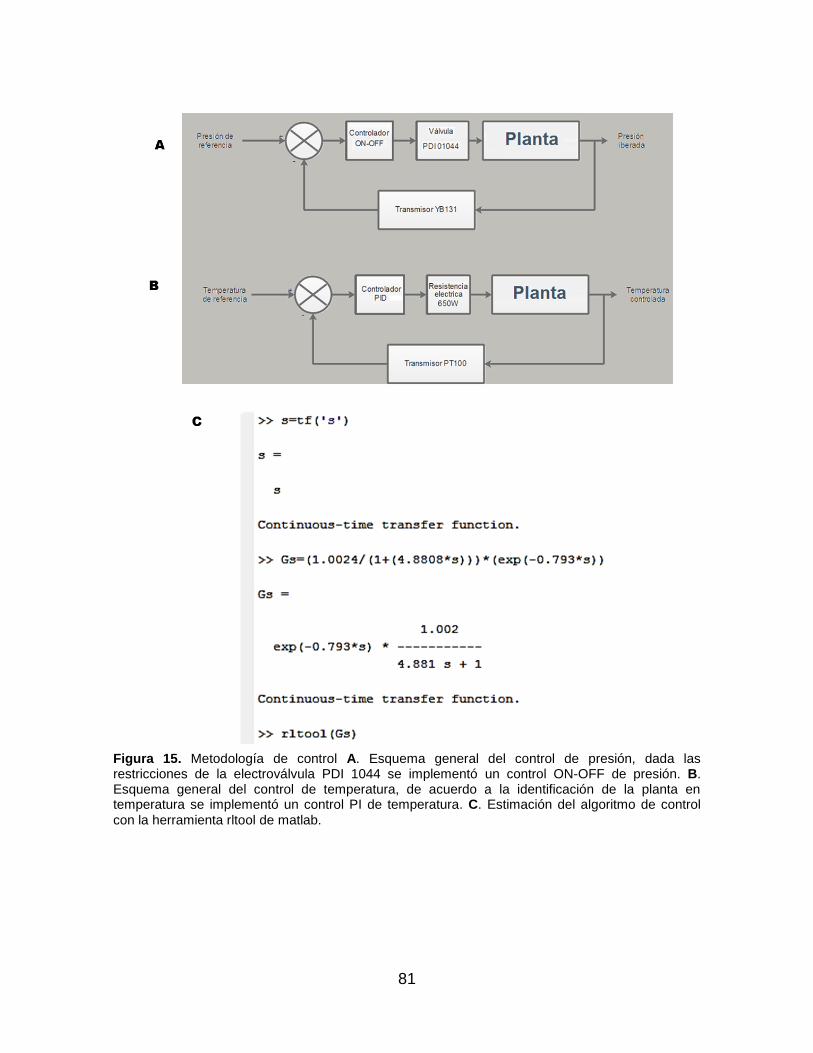
81
Figura 15. Metodología de control A. Esquema general del control de presión, dada las restricciones de la electroválvula PDI 1044 se implementó un control ON-OFF de presión. B. Esquema general del control de temperatura, de acuerdo a la identificación de la planta en temperatura se implementó un control PI de temperatura. C. Estimación del algoritmo de control
con la herramienta rltool de matlab.

82
Control de Presión
Para mantener la presión controlada en el biodigestor se implementó la
electroválvula de referencia PDI1044, la cual por su característica de
funcionamiento ON-OFF, permitió establecer un controlador como se muestra en
la Figura 15.A. Se configuró un valor set point de 9 PSI con una histéresis de 0.2
PSI, para mantener la planta en condiciones de presión seguras para el proceso
efectuado.
83
4. RESULTADOS Y DISCUSIÓN
4.1. Resultados de la fase experimental.
A continuación se presentan los resultados de la fase experimental, estos se
dividen en dos fases.
Fase 1: Los resultados correspondientes a la caracterización de la biomasa. i)
Densidad: parámetro necesario para establecer las proporciones en el cargue y en
el desarrollo del modelo matemático correspondiente a la reacción; ii) % de
humedad; iii) % de materia orgánica: condiciones iniciales pertinentes en la
reproducibilidad y repetibilidad de los experimentos y iv) calor especifico del CRB y
la mezcla reaccionante.
Fase 2: Cuantificación de la presión generada en el biodigestor, donde se
presentan las características asociadas a los experimentos realizados, teniendo en
cuenta los protocolos descritos en los ANEXOS 1, 2 y 3; y los datos de
sobrepresión del biodigestor registrados, graficados y comparados con los
resultados de las simulaciones del modelo dinámico.
4.1.1. Caracterización
Densidad del CRB: se aplicó el método gravimétrico y se obtuvo la densidad de
CRB. El valor promedio fue de 0.993503149 (g/ml) con una desviación estándar
de 0.009770395. Dado que se calculó la densidad con base en los resultados de
tres muestras diferentes de biomasa, se asume la densidad como el promedio de
los resultados de las tres muestras ± la desviación estándar (Figura 16.A).
El cálculo de la densidad de la biomasa es necesario para establecer la relación
su cargue en proporciones 1 a 1, sea masa a masa, masa a volumen o volumen a
volumen (ecuación 34) en consecuencia del resultado; puesto que la densidad del
CRB es aproximadamente igual a la densidad del agua en Bogotá, se estableció
una relación volumen de agua contra masa de CRB en proporciones 1 a 1.

84
2
2
2
1 1
1 1
1 1
H O CRB
H O CRB
H O CRB
kg kg
L kg
L L
(34)
Porcentaje de humedad del CRB: por medio del método gravimétrico y de
acuerdo con la ecuación (11) se obtuvo el porcentaje de humedad del CRB, el
valor promedio de las tres muestras utilizadas fue de 71,85674034% con una
desviación estándar de 0,053015272 (Figura 16.B).
Porcentaje de materia orgánica del CRB: de igual forma por método
gravimétrico y aplicando la ecuación (12) se obtuvo el porcentaje de materia
orgánica de la biomasa utilizada (CRB), el valor promedio de las tres muestras
utilizadas fue de 83,42192755% con una desviación estándar de 0,195072388
(Figura 16.C).
Los porcentajes de humedad y materia orgánica de la biomasa son necesarios, ya
que los experimentos realizados en el desarrollo de esta tesis se hicieron bajo
estas condiciones de la biomasa, y para efectos de reproducibilidad de estos
experimentos se deben tener en cuenta dichas condiciones que favorezcan
correlación en los resultados.
Concentración del reactante: con base en las relaciones matemáticas
establecidas en la tabla 2 se estableció la concentración del reactante para los
experimentos realizados cuyo resultado es 0.5020.
Calor especifico del CRB: por medio del método gravimétrico y de acuerdo con
la ecuación (19) se obtuvo el calor especifico del CRB, el valor promedio de las
tres muestras utilizadas fue de 1,248784473 (Cal/g°C) con una desviación
estándar de 0,043100033 (Figura 17.A).
Calor especifico de la mezcla reactante (BM): de igual forma por método
gravimétrico y aplicando la ecuación (20) se obtuvo el calor especifico de la
mezcla reactante (MB), el valor promedio de las tres muestras utilizadas fue de

85
0,862431905 (Cal/g°C) con una desviación estándar de 0,009951143 (Figura
17.B).
Figura 16. Resultados de caracterización de la biomasa CRB; los ensayos se realizaron por triplicado. A. (Arriba) Fotografías representativas al cálculo de la densidad de la biomasa, las masas de cada ensayo fueron cuantificadas con la balanza de brazo. (Abajo) Tabla que referencia masa, volumen y densidad del CRB, se presentan como el promedio X±SD. B. (Arriba) Fotografías representativas al cálculo de la humedad del CRB, las masas de cada ensayo fueron cuantificadas con la balanza analítica. (Abajo) tabla que referencia masa, volumen y porcentaje de humedad de la biomasa, el resultado se presenta como el promedio X±SD. C. (Arriba) fotografía representativa al cálculo del porcentaje de materia orgánica de la biomasa determinando las masas con la balanza analítica. (Abajo) Tabla que referencia masas de cada muestra deshidratadas en el horno, masas de cada muestra incineradas en la mufla y porcentaje de materia orgánica de la biomasa, el resultado se presenta como el promedio X±SD.

86
Figura 17. Calor especifico del CRB y del reactante; los ensayos se realizaron por triplicado. (Arriba) Fotografías representativas al cálculo del calor específico del CRB, las masas de cada ensayo fueron cuantificadas con la balanza de brazo, calentadas con la plancha de calentamiento y la temperatura medida con el termómetro. A. (Abajo) Tabla que referencia temperatura inicial (T0) del agua, y CRB, los deltas de temperatura del agua y CRB respectivamente. El resultado de calor específico del CRB se presenta como el promedio X±SD. B. (Abajo) Tabla que referencia temperatura inicial (T0) del agua, y mezcla reactante, los deltas de temperatura del agua y mezcla reactante respectivamente. El resultado del calor específico de la mezcla reactante se presenta como el promedio X±SD.
4.1.2. Sobrepresión del biodigestor
La tabla 4 Describe las características generales del experimento, tenidas en
cuenta en la repetibilidad y reproducibilidad de los experimentos.
Características del Cargue de la biomasa
Volumen del reactante 8 litros
Temperatura 34-36 °C
Rango del Proceso Mesofilico
Reactante CRB – agua
Relación biomasa – agua 1 : 1
Duración 37 días
Tabla 4. Características generales de los experimentos realizados. En la tabla se encuentran los parámetros con los que se realizó el cargue de la biomasa en la fase de experimentación.

87
El dato de “Presión Extraída” se obtuvo verificando el valor del sensor de presión
justo antes de abrir la válvula de salida del gas (electroválvula), en ese momento
es aliviado el gas al interior del reactor y nuevamente cerrada la salida; para el
dato de “Presión Acumulada”, se sumaron las presiones parciales, y de esta forma
se calcula un estimado de total de gas extraído; es importante aclarar que el
proceso de extracción se inició desde el séptimo día, ya que antes de este tiempo
el gas contenido no posee una presión significativa para la extracción del biogás.
Durante todo el proceso se realizaron pruebas de llama al gas extraído, donde se
evidenció una concentración de metano suficiente para generar combustión.

88
Figura 18. Resultados de sobrepresión registrada en la fase experimental. A. Tabla con valores de presión y presión acumulada. Se establece la producción de gas en términos de la presión aliviada del reactor. B. Grafica de presión. Representa los valores aliviados de la presión en el proceso durante 37 días. C. Grafica de presión obtenida. Muestra los valores acumulados del alivio de la presión durante todo el experimento. D. Análisis de los resultados del primer experimento. E. Prueba de llama del biogás.

89
4.1.3. Análisis sobre la presión generada y el producto
En los días 13, 27 y 34 no se registró extracción de biogás puesto que
estos días corresponden a cierres de laboratorio en días domingo,
consecuencia de esto se evidencia una sobrepresión aproximadamente del
doble en el reactor para la siguiente medición.
Las pruebas de llama efectuadas en cada extracción ofrecen una
naturaleza reductora y se evidencia una combustión que tiende a ser
completa y limpia.
Después del día 30 la producción de biogás es significativamente baja con
relación al proceso en fase exponencial creciente (días 15 a 19).
Como se esperaba, con base en el ajuste de tendencia de la gráfica de la
Figura 18.B. se observa correlación con el modelo matemático establecido
para la sobrepresión del reactor expresado en la Figura 18.D.
4.2. Desarrollo del modelo dinámico
El modelo propuesto por esta tesis es una adaptación de la teoría de la cinética
química a la caracterización de la biomasa CRB y al funcionamiento de un
biodigestor anaerobio discontinuo; este modelo matemático describe de forma
simple y precisa el comportamiento asociado a la reacción química, los eventos
físicos de transferencia de calor en el sistema y presión generada en el
biodigestor. De esta forma se cumplió con el objetivo de Identificar un modelo
dinámico de las variables temperatura y presión para el proceso de digestión
anaeróbia de biomasa con CRB implementado en el laboratorio.
Velocidad cinética de la reacción
Teniendo en cuenta que existe hay una relación directa entre la velocidad de
reacción y la concentración del reactante o el producto; se asume la velocidad de
la reacción con relación a la concentración del reactante ya que no se posee
caracterización del producto; la siguiente expresión (ecuación 35), denota la
velocidad de desaparición de la biomasa por medio de una reacción de naturaleza
irreversible que fue adaptada en esta tesis para el CRB.

90
)( ) (Γ BMBM BM
dCK T C
dtt (35)
Concentración de la biomasa o sustrato
Teniendo en cuenta la expresión anterior, se consideró la razón de cambio de la
concentración de la biomasa en función del tiempo. Dado que la concentración
inicial del sustrato depende estrictamente de la caracterización fisicoquímica del
mismo, se planteó la tasa de degradación de la biomasa en función del tiempo
bajo la expresión (36):
( )(( ) )BM
BM
dCK T C
dt
tt (36)
ΔH
RTK Ae
(37)
Reemplazando la ecuación (37) en la ecuación (36), se obtiene:
Δ
460( )) ( )(
H
RTBMBM
tCC
dtt
dAe
(38)
Es claro que el signo negativo que acompaña a K(T) (constante de velocidad de la
ecuación de Arrhenius en la teoría de las colisiones), se denota una función
decreciente, la cual representa la perdida de la concentración de la biomasa en
función del tiempo.
Concentración del producto
El balance de la concentración del producto en función del tiempo se expresa
mediante la ecuación 39, esta relaciona la constante de velocidad de la reacción
con las concentraciones de la biomasa y el producto en función del tiempo (ver
lista de abreviaturas)
( )( ) ( ) ( ) ( )P
BM P
dCK T C t K T C t
dt
t (39)

91
Reemplazando la ecuación (37) en la ecuación (39), se obtiene:
Δ Δ
460 460( ) ( ) ((
) ()
)PB
H H
RT RT
M P
dCAe
tC t Ae C t
dt
(40)
Para el producto, cuya condición inicial es cero (en tiempo 0, no existe ningún
producto), se relaciona con la taza de degradación de la biomasa, mediante el
signo negativo de la ecuación (36), es decir: a medida que la biomasa o sustrato
pierde su concentración, el producto adquiere concentración.
Balance de energía en el interior del biodigestor
( ) ( ) ( )B
e BMBM BM i i m BM BM BM PM
dT tC V A T t T t V K T C t V K T C t
dt (41)
Expresión de temperatura de la biomasa
De acuerdo con la analogía presentada en el apartado 3.5.2. se asume para todos
los balances de energía lo siguiente: i) las densidades, los calores específicos y
los volúmenes, como las capacitancias térmicas presentes en el sistema ya que
estos elementos retienen la energía en forma de calor; ii) los coeficientes
exotérmicos y peliculares de transferencia de calor por convección y las áreas de
contacto presentes en el sistema, como resistencias térmicas ya que estos
elementos tienden a disipar la energía en forma de calor presente en el sistema,
(ver lista de abreviaturas).
( ) ( )( ) i i m BM BMBM B
e
BM B
P
BM M
MA T t T t V K T C t V K T C tdT t
dt C V
(42)

92
Balance de energía en las paredes del biodigestor
2 2
( ) e
i i BM
M M M M o MM H O H O
dT tC V A T t T t A T t T t
dt (43)
Expresión de la temperatura en las paredes del biodigestor
2 2 ( ) M H O H Oi i BM o M
e
M
M M M
A T t T t A T t T tdT t
dt C V
(44)
Balance de energía en el calentador
2
2 2 2 2 2 2
( )
H O
H O H O H O H O H O M AM
e
BM AMB AMB BH O
dT tC V A T t T t A T t T t
dt
(45)
Expresión de la temperatura del agua en el calentador
2 2 22
2 2 2
( ) H O H O M AMB HBM AMB AMB
e
OH O
H O H O H O
A T t T t A T t T tdT t
dt C V
(46)
Ecuaciones en el punto de operación
Análogamente se relacionaron la temperatura y el flujo térmico, con la potencia de
la resistencia del calentador en el punto de operación, donde:
110V V
22.5R
95T F
2125H Om kg
24186 j
kg CH Oc
Tabla 5. Parámetros técnicos del sistema de calentamiento.
93
TQ VI (47)
VIQ
T (48)
PI
R (49)
2I R
QT
(50)
2 2( )H O H OQ C m T (51)
2
2 295
H O
T F H O H O
dT Q
dt C m
(52)
2
2 2
2
95
95H O
T F H O H O
I RdT F
dt C m
(53)
Sobrepresión del reactor
(54)
(55)
(56)
4.3. Resultados de las simulaciones del modelo dinámico

94
De acuerdo con las simulaciones del modelo matemático adaptado para el CRB y
las características presentadas en los experimentos realizados, se obtuvieron
cuatro graficas representadas en la Figura 19. Teniendo como variable
independiente el tiempo el cual tiene un dominio de 0 a 30 días; las unidades de
temperatura están expresadas en grados Fahrenheit (°F), la presión esta
expresada en libra por pulgada cuadrada (psi) y las concentraciones se
encuentran expresadas en libra mol por pie cubico (lbmol/pie3).
En la simulación de las ecuaciones 36 y 39 se evidencia la relación de las
concentraciones reactivo-producto (Figura 19.A. 1.), la concentración de la
biomasa disminuye en función del tiempo, mientras la concentración del producto
se incrementa de forma exponencial (Figura 19. A. 2), hasta el punto de
intersección de los dos trazados donde esta tiende a disminuir este resultado no
es comparable con los resultados experimentales debido a la complejidad que
representa caracterizar la biomasa y el producto en dependencia del tiempo
manteniendo las condiciones anaeróbicas del sistema.
En las gráficas B y C de la Figura 19. Se muestran las simulaciones de las
ecuaciones 44 y 42 respectivamente, las cuales corresponden a la temperatura en
las paredes del reactor y la temperatura de la biomasa las cuales tienden a
estabilizarse en un valor deseado de 95°F; estos resultados son comparables con
la identificación experimental del sistema presentado en los resultados de control.
La grafica D de la figura 19. Presenta la simulación del modelo de la sobrepresión
generada en el biodigestor (expresada en la ecuación 56), en esta, la presión del
gas incrementa exponencialmente en dependencia de las concentraciones del
reactante y el producto (figura 19. A.); se evidencia correlación con la tendencia
registrada experimentalmente en la figura 18.B.
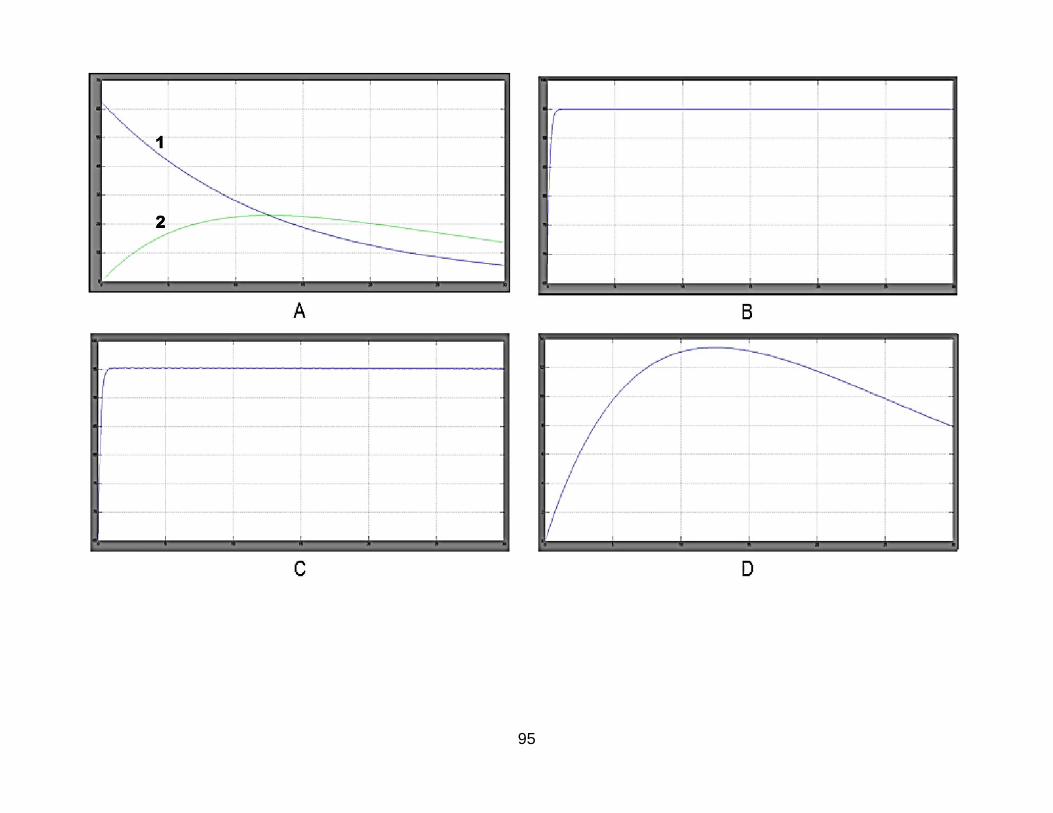
95

96
Figura 19. Resultado de las simulaciones. A. Concentración reactivo-producto en función del
tiempo. 1. disminución de la concentración de la biomasa, corresponde a la ecuación (36). 2.
Aumento de la concentración del gas producto de la digestión anaerobia, corresponde a la
ecuación (39). B. Temperatura en las paredes del reactor, corresponde la ecuación (44). C.
Temperatura de la biomasa, corresponde a la ecuación (42). D. Sobrepresión del reactor,
corresponde a la ecuación (56).
Teniendo en cuenta los resultados asociados al desarrollo del modelo matemático
del sistema de digestión anaerobia con CRB se cumplió con el segundo objetivo
propuesto en esta tesis.
4.4. Resultados del control
Identificación de la planta en temperatura:
La identificación del sistema en temperatura (Figura 20. A), corresponde a un
sistema de primer orden con retardo; aunque este presenta la misma
configuración que un sistema de primer orden puro, para nuestro caso existe un
retardo respecto a la señal de entrada; se sugiere que este retardo corresponde al
equilibrio térmico de todos los elementos del sistema antes de la fase exponencial
presente en el incremento de la temperatura. La función de transferencia del
sistema identificado es de la forma descrita en la (Figura 20. B), cuya grafica se
presenta en la (Figura 20.C).
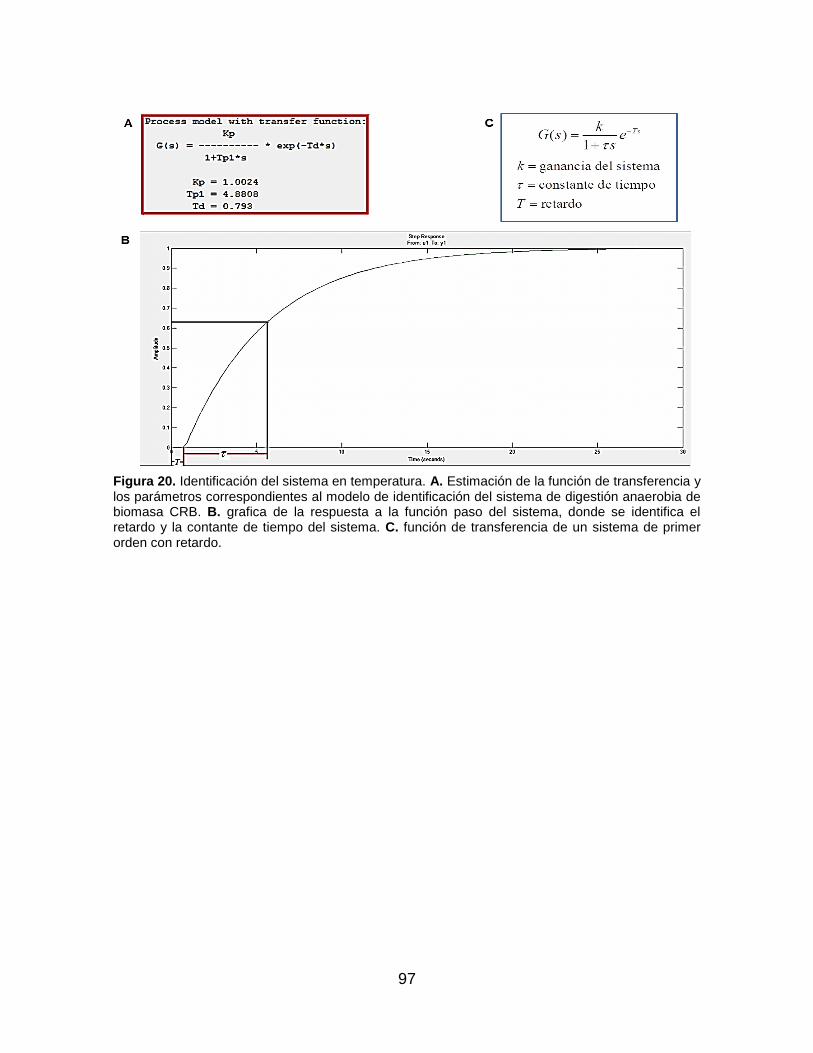
97
Figura 20. Identificación del sistema en temperatura. A. Estimación de la función de transferencia y los parámetros correspondientes al modelo de identificación del sistema de digestión anaerobia de biomasa CRB. B. grafica de la respuesta a la función paso del sistema, donde se identifica el retardo y la contante de tiempo del sistema. C. función de transferencia de un sistema de primer orden con retardo.
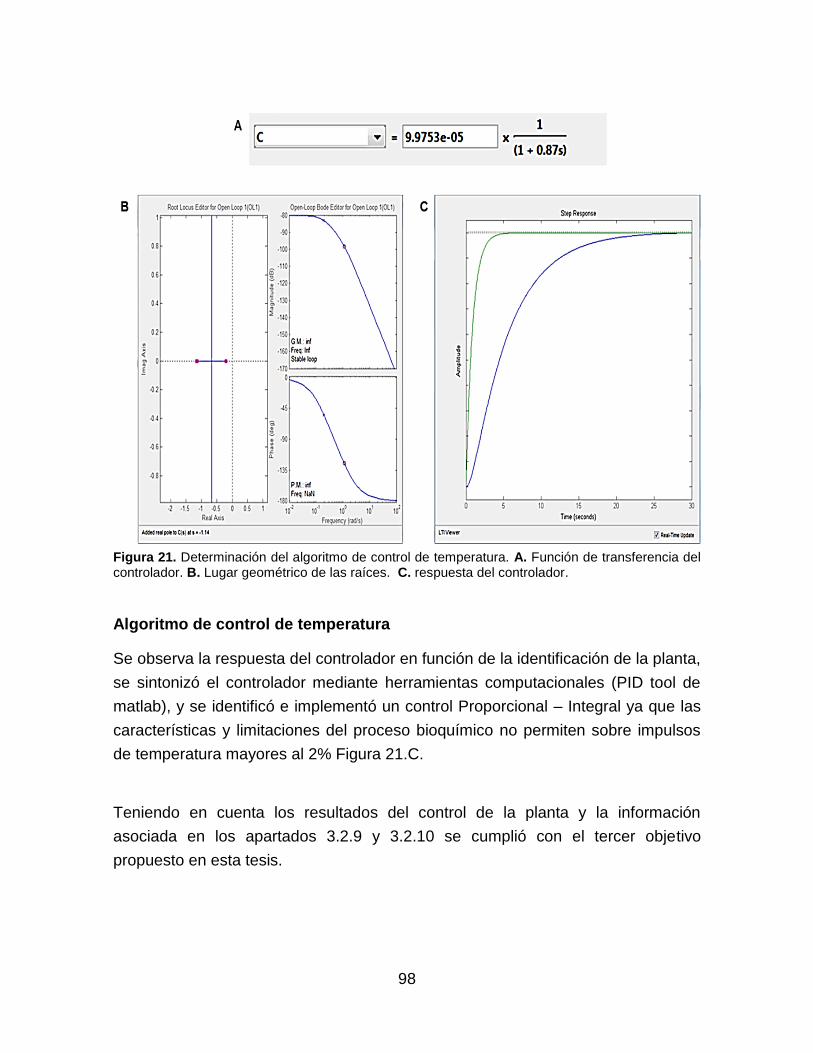
98
Figura 21. Determinación del algoritmo de control de temperatura. A. Función de transferencia del controlador. B. Lugar geométrico de las raíces. C. respuesta del controlador.
Algoritmo de control de temperatura
Se observa la respuesta del controlador en función de la identificación de la planta,
se sintonizó el controlador mediante herramientas computacionales (PID tool de
matlab), y se identificó e implementó un control Proporcional – Integral ya que las
características y limitaciones del proceso bioquímico no permiten sobre impulsos
de temperatura mayores al 2% Figura 21.C.
Teniendo en cuenta los resultados del control de la planta y la información
asociada en los apartados 3.2.9 y 3.2.10 se cumplió con el tercer objetivo
propuesto en esta tesis.

99
4.5. Resultados de la supervisión del proceso
De acuerdo con lo evidenciado en el desarrollo metodológico de esta tesis
respecto a establecer un sistema de adquisición y supervisión del proceso de
digestión anaerobia de la biomasa CRB a escala de laboratorio, se cumplió con el
primer objetivo propuesto en esta tesis.
A continuación se presenta como resultado una interfaz web con la información
asociada al proyecto desarrollado, enlaces de videos que explican de forma clara
el proceso de digestión anaerobia y un enlace que establece la fecha y hora legal
en tiempo real para Colombia (Figura 22. A). A demás, en la parte inferior se
encuentra un hipervínculo que direcciona al usuario, a la página que proporciona
la información de los sensores de temperatura de la biomasa, temperatura
ambiente y presión en el reactor respectivamente (Figura 22. B), los cuales fueron
registrados por el sistema de adquisición distribuida de señales.
Para uno de los experimentos realizados se evidenció una temperatura de la
biomasa en fase de calentamiento de 28.02 °C, una temperatura ambiente de
20.02 °C y una presión generada en el biorreactor de 8.87 PSI.

100
Figura 22. Resultados de la supervisión del sistema. A. Imagen representativa de la pagina introductoria, asociada a la información general del proyecto; en la parte inferior de esta se encuentran los hipervínculos relacionados a la supervisión del sistema. B. Supervisión y monitoreo de las variables asociadas temperatura de la biomasa, temperatura ambiente y presión generada por el reactor químico en el proceso de digestión anaerobia de biomasa CRB.

101
5. CONCLUSIONES
Se diseñó e implementó un sistema de adquisición, procesamiento y supervisión
de las variables temperatura de la biomasa, temperatura ambiente y presión del
biodigestor; de igual forma se controlaron las variables temperatura de la biomasa
y presión del biodigestor para el proceso de digestión anaerobia de la biomasa
CRB en un dominio temporal de 37 días.
Por medio del método de identificación se adaptó a la caracterización de la
biomasa CRB un modelo matemático que explica el comportamiento del sistema
de digestión anaerobia para esta biomasa.
Aunque las ecuaciones que componen el modelo matemático adaptado al sistema
de temperatura son de naturaleza no lineal, el sistema se comporta como un
sistema de primer orden con retardo, este hecho fue de gran relevancia a la hora
de establecer un algoritmo de control de temperatura, por otra parte debido a las
restricciones ofrecidas por la electroválvula implementada en el alivio de la presión
del reactor solo fue posible la implementación de un control on off de presión. El
pH es un parámetro de entrada en el proceso y mientras este se lleve a un valor
en el rango que va de 6.5 a 7.5, este valor se mantiene en un rango constante a lo
largo del proceso. Por otra parte

102
RECOMENDACIONES Y ALCANCES
Es recomendable generar muestras con varias repeticiones y réplicas de
los procedimientos realizados en este trabajo, con el fin de establecer un
análisis estadístico que lleve a la validación o no validación de los
protocolos implementados y del modelo matemático establecido.
Establecer una caracterización pertinente de la cuantificación por
composición del producto obtenido.
Implementar estrategias metodológicas en el proceso de endulzamiento y
filtrado del producto generado por el proceso de digestión anaerobia de
biomasa CRB.

103
REFERENCIAS BIBLIOGRAFICAS
[1] F. S. Carlos and L. G. Ramón, "Modelización y Control de Temperatura de un Reactor "Batch" para un Proceso Quimico Exotermico," Escola Tecnica Superior Enginyeria, Universitat Rovira I Virgili, 2004.
[2] Sendros, "Modelización y control de temperatura de un reactor "Batch" para un proceso químico exotérmico," 2004.
[3] M. Rios and L. Ramirez, "Aprovechamiento del contenido ruminal bovino para ceba cunicola, como estrategia para diezmar la contaminación generada por el matadero en San Alberto," Prospect, vol. 10, pp. 56-63, Julio - Diciembre de 2012 2012.
[4] K. G. Denbigh and J. C. R. Turner, "Introducción a la teoria de los reactores quimicos," Limusa Mexico, 1990.
[5] C. Q. C. Quiñones, "ENERGIAS ALTERNATIVAS "SOLUCIÓN PARA EL DESARROLLO SUSTENTABLE"," Adnuma. chile, 2006.
[6] I. F. R. Hernandez, "EMISIONES DE METANO GENERADAS POR EXCRETAS DE ANIMALES DE GRANJA Y CONTENIDO RUMINAL DE BOVINO," Tesis de Doctorado en Ciencias, Colegio de Postgraduados, 2010.
[7] R. V. Milton and R. H. Luis, "Aprovechamiento del contenido ruminal bovino para ceba cunicola, como estrategia para diezmar la contaminación generada por el matadero en San Alberto," Prospect, vol. 10, pp. 56-63, 2012.
[8] C. Cadavid, "Diseño Tecnologico Para el aprovechamiento de subproductos del beneficio de bovinos en el matadero frigorifico de Coolesar," Universidad Popular del Cesar. Valledupar. Cesár. Colombia, 2001.
[9] G. Ayala and T. F. Perea, "Reciclado de materiales organicos de desperdicio a escala industrial," Grupo ecologico, pp. 200-209, 2000.
[10] IPSE., "Soluciones energeticas para las zonas no interconectadas de colombia," 2014.
[11] IPSE., "Instituto de Planeación y Promoción de Soluciones Energéticas para las Zonas No Interconectadas," presentación oficial, 2012.
[12] M. Henze, J. Grandy, W. Gujer, G. Marais, and T. Matsuo, "Activated Sludge Model No.1 IAWPRC," Scientific and Technical Report, vol. N° 1, London, UK, 1987.
[13] A. W. Lawrence and P. L. McCarty, "Kinetics of Methane Fermentation in Anaerobic Treatment," Journal Water Pollution Control Federation, vol. 41, pp. 1-17, 1969.
[14] J. F. Andrews and S. P. Graef, "Dynamic Modelling and simulation of the Anaerobic Digestion Process," Advances in Chemistry Series, vol. 105, pp. 126-162, 1971.

104
[15] F. E. Mosey, "Mathematical Modelling of the Anaerobic Digestion Process: Regulatory Mechanism for the Formation of Short-Chain Volatile Acids From Glucose," Water Science and Technology, vol. 15, pp. 209-232, 1983.
[16] R. Moletta, D. Verrier, and G. Albagnac, "Dynamic Modelling of Anaerobic Digestion," Water Research, vol. 20, pp. 427-434, 1986.
[17] D. J. Costello, P. F. Greenfield, and P. L. Lee, "Dynamic Modelling of a Single Stage High-Rate Anaerobic Reactor - II. Model Verification," Water Research, vol. 25, pp. 859-871, 1991.
[18] G. B. Ryhiner, E. Heinzle, and I. J. Dunn, "Modelling and Simulation of Anaerobic Wastewater Treatment And It´s Application to Control Desing: Case Whey," Biotechnology Progress, vol. 9, pp. 332-343, 1993.
[19] D. I. Massé and R. L. Droste, "Comprehensive Model of an Anaerobic Digestion of Swine Manure Slurry in a Sequencing Batch Reactor," Water Research, vol. 34, pp. 3087-3106, 1999.
[20] D. Dochain and P. A. Vanrollenghem, "Dynamical Modelling and Estimation in Wastewater Treatment Processes," IWA Publishing, London, UK, 2001.
[21] R. J. Magaña, R. Torres, M. Martinez, C. Sandoval, and R. Hernandez, "Producción de biogas a nivel laboratorio utilizando estiercol de cabras," Acta Universitaria, vol. 16, pp. 27-37, 2006.
[22] G. A. M. Ramirez and C. R. Walteros, "Diseño y construcción de un biodigestor anaerobio de lecho fijo para operación en continuo a escala piloto con control de temperatura y pH," Universidad Industrial de Santander, 2007.
[23] V. A. Ramón, C. S. E. Yesenia, and V. M. Javier, "SELECCIÓN DE LA INSTRUMENTACIÓN Y VARIABLES DE PROCESO DE UN SISTEMA DE BIODIGESTION EN FASES SEPARADAS (ACIDOGÉNESIS Y METANOGÉNESIS)," Revista Colombiana de Tecnologias de Avanzada, vol. 2, pp. 42-47, 2009.
[24] C. R. B. Gomez and M. A. D. Hernandez, "INSTRUMENTACIÓN DE UN BIODIGESTOR DE ESTIERCOL ANIMAL PARA ANALIZAR SU COMPORTAMIENTO DINAMICO," universidad Industrial de Santander, 2010.
[25] G. A. Alvarez, "CONTROL DE TEMPERATURA Y pH APLICADO EN BIODIGESTORES MODULARES DE ESTRUCTURA FLEXIBLE CON RECICLADO DE LODOS A PEQUEÑA ESCALA," Universidad Autónoma de Querétaro, 2013.
[26] J. F. Marulanda, M. G. Barco, and J. A. López, "Control Inteligente De Un Reactor Quimico," Grupo de percepción y sistemas inteligentes. Universidad del Valle. Cali, Valle, Colombia.
[27] C. P. De Colombia, "Bogotá," Recuperado de http://wsp. presidencia. gov. co/Normativa/Documents/Constitucion-Politica-Colombia. pdf.[Links], 1991.
[28] C. d. l. r. d. Colombia, "Ley N° 1665," 2013. [29] C. d. l. R. d. Colombia, "Ley N° 1715," 2014. [30] P. d. l. R. d. Colombia, "Decreto N° 1287," 2014. [31] C. Climático, "Protocolo de Kioto," 2010.
105
[32] C. Rodríguez Garzón, B. Rojas Villa-Roel, and S. Santafe Correa, "Estudio de factibilidad para el montaje de una empresa procesadora de subproductos par la industria de alimentos concentrados para animales," 2004.
[33] A. R. Ríos, "Mejora de las condiciones de vida de las familias porcicultoras del Parque Porcino de Ventanilla, mediante un sistema de biodigestión y manejo integral de residuos sólidos y líquidos, Lima, Perú," Universitat Ramon Llull.
[34] U. Werner, U. Stohr, and N. Hees, "Biogas plants in animal husbaandry," Deutsches
Zentrum für Entwicklungstechnologien (GTZ), 1989. [35] T. Vincent, "Digestión anaerobia, bases cinéticas y microbiológicas.1997,"
Universidad Autónoma de Barcelona, 1997. [36] L. Sasse, C. Kellner, and A. Kimaro, "Unidad mejorada de biogás para los
países en vías de desarrollo," 2004. [37] M. T. Madigan, J. M. Martinko, and J. Parker, Biologia de los
microorganismos, 10 ed., 2004. [38] GTZ, "Información y servicio consultivo en tecnología apropiada," proyecto
GTZ, 2004. [39] Metcalf and Eddy, "Wastermater Engineering," McGraw Hill, New york, pp.
306-315, 1973. [40] X. Floats, A. Bonmati, and M. Seró, "Clasificación de tecnologías de
digestión anaerobia," Aplicación en el aprovechamiento energético de residuos ganaderos, 1997.
[41] J. M. Smith and A. E. Gómez, Ingeniería de la cinética química: Compañía Editorial Continental, 1968.
[42] C. S. G. Quintero, "Apuntes de Procesos Quimicos para Ingenieria de Sistemas," Cap 7: Cinetica de reacción y Reactores quimicos, pp. 253-270.
[43] L. Ljung, "Modeling of Dynamic Systems," Prentice Hall, New Jersey, 1994. [44] D. A. i. informatica, "El protocolo http," univ Nac Piura, pp. 1-7, 1945. [45] Kioskea, "El protocolo http," 2014. [46] D.A.Quintero, "DISEÑO Y PROGRAMACIÓN DE HERRAMIENTA
INFORMÁTICA PARA LA ASIGNACIÓN DEL ANCHO DE BANDA EN TIEMPO REAL BASADO EN POLÍTICAS QOS," 2009.
[47] C. Gardoki, "Qué es el protocolo SSH y cómo configurarlo para mejorar la seguridad de acceso a los servidores Linux."
[48] A. Moss, J. P. Jouany, and J. Newbold, "Methane production by ruminants: its contribution to globar warming," Annales de zootechnie, pp. 231-253, 2000.
[49] S.Semansky and Y. Freedman, "Fisica universitaria," vol. 1. [50] R. Vignoli, "Esterilización, desinfección y antisepsia," Extraído el, vol. 5,
2008. [51] A. HAANDEL and G. LETTINGA, "Tratamento Anaeróbio de Esgotos,"
Campina Grande, 1994.

106
[52] J. D. Hernandéz, "Implementación del modelo de digestión anaerobia ADM1 en matlab/simulink," Ingenieria geologica y minera, Escuela técnica superior de ingenieria de minas
2015.
107
ANEXOS
Anexo 1. Protocolo de desinfección y esterilización
Materiales:
0.3 ml de hipoclorito de sodio de alta concentración
200 ml de etanol de alta concentración
25 litros de agua destilada
1 Esponja plástica
1 vaso de precipitado de 250ml
1 vaso de precipitado de 500ml
1 vaso de precipitado de 1000ml
1 pipeteador
1 pipeta de 2ml
agitadores de vidrio
1 rollo de toallas de papel
Cabina extractora
Opcional
1 autoclave
1 mechero
1 rejilla de asbesto
1 trípode
Procedimiento
1. antes de empezar con la desinfección del instrumental de laboratorio y los
biodigestores es pertinente conocer las normas de seguridad y reglamento
del laboratorio de química, así como portar los implementos necesarios
para desarrollar una práctica, como son: bata de laboratorio u overol,
guantes de nitrilo, cofia y tapabocas.
2. Solicitar y verificar el estado de los materiales previamente establecidos,
otorgados por el personal auxiliar de laboratorio.

108
3. Preparación de la solución hipoclorito – agua al 0.3%:
Mediante una pipeta de 5ml de capacidad y un pipeteador, dosificar 3ml de
hipoclorito de sodio en un vaso de precipitado de capacidad 1000ml,
posteriormente verter 997ml de agua destilada y homogenizar la solución
con un agitador de vidrio.
4. Preparación de la solución etanol – agua al 40%:
En un vaso de precipitado de 500ml de capacidad dosificar 200ml de etanol,
posteriormente agregar 300ml de agua destilada y homogenizar la solución
con un agitador de vidrio (es de gran importancia que el agitador no tenga
trazas de hipoclorito de sodio).
5. Desinfección de mesones y superficies asociadas al cargue de la
biomasa:
Impregnar toallas de papel con las soluciones preparadas y aplicar de forma
rápida y general, esperar de 3 a 5 minutos, remover reiteradamente con un
paño de tela humedecido con agua destilada (este debe estar limpio), hasta
eliminar cualquier residuo químico de los mesones.
6. Diluir en un vaso de precipitado limpio 10ml de detergente no ionico con
100 ml de agua de grifo y aplicar con la esponja plástica sobre los
biodigestores e instrumental metálico; el objeto de este procedimiento es el
de remover partículas de grasa acumulada.
7. Lavar con abundante agua de grifo hasta eliminar cualquier residuo del
detergente.
8. aplicar la solución de hipoclorito en el interior y exterior del biodigestor,
dejar actuar de 3 a 5 minutos, para posteriormente remover con agua
destilada.
9. Limpiar las superficies del biodigestor con toallas de papel impregnadas con
la solución de etanol, dejar actuar de 3 a 5 minutos, para posteriormente
remover con agua destilada.
10. Desechar todo el material contaminado por agentes químicos en su
respectivo recipiente de disposición.
11. Lavar todos los instrumentos (biodigestores, material de laboratorio,
mesones y superficies asociadas al cargue de la bioma) con abundante
agua destilada, hasta eliminar las trazas de los agentes químicos.
12. Eliminación completa de agentes químicos y biológicos:
Opción 1
Mediante autoclave esterilizar los biodigestores y material requerido para el
cargue de la biomasa.
109
Opción 2
De manera empírica, se propone el uso de un mechero, un trípode y una
rejilla de asbesto para llevar a punto de ebullición 5 litros de agua destilada
(dentro de los biodigestores) por 6 horas.
13. Llevar todo el material desinfectado a la cabina de extracción encendida por
el tiempo necesario antes del cargue de la biomasa.
Anexo 2. Protocolo del cargue de la biomasa
Materiales:
1 balanza de brazo.
1 vaso de precipitado de capacidad 1000ml.
1 espátula.
Biodigestor.
1 bomba de vacío.
Procedimiento:
Teniendo en cuenta que la densidad de la biomasa es aproximadamente igual a la
densidad del agua, es posible establecer una relación de masas para el cargue
(1litro = 1kg); como la capacidad del biodigestor es de 10 litros se procede a
cargar el 80% de este con el reactante es decir 8 litros; el siguiente procedimiento
se realiza en el interior de la cabina de extracción encendida y con los
implementos previamente desinfectados.
1. Depositar 4 litros de agua destilada en el biodigestor.
2. Depositar 4kg de CRB en el biodigestor (teniendo en cuenta que la
capacidad del vaso de precipitado es de 1000ml y el rango de la balanza es
de 1kg, la masa total del contenido ruminal se fracciona en 4 proporciones
de 1kg).
3. Homogenizar la mezcla con la espátula.
4. Medir pH y en caso de no estar en un rango de 6.5 a 7.5 estabilizar
agregando sustancias básicas o acidas.

110
5. Cerrar bien el biodigestor.
6. Ajustar los pernos del biodigestor asegurando hermeticidad.
7. Abrir la válvula de extracción del biodigestor.
8. Conectar la bomba de vacío a la válvula de extracción y extraer el aire del
interior del biodigestor por 25 segundos.
9. Cerrar la válvula de extracción.
10. Desconectar la bomba de vacío.
11. Llevar el biodigestor al sistema de calentamiento.
Anexo 3. Protocolo de extracción y cuantificación
Materiales:
Manguera de acople
Es una manguera de gas de 3/8” en cuyos extremos se conectan, un
adaptador macho reductor de ½” a 3/8” y un adaptador hembra reductor de
3/8” a 1/8”.
Recipiente de medición por desplazamiento:
Es una estructura cilíndrica con dimensiones conocidas y con un nivel definido
de agua en la que se sumerge la sección de almacenamiento; esta sección
sumergida se debe retener con una malla para impedir que salga del agua. Se
debe tener en cuenta la medida del nivel del agua con el neumático
desocupado y con el neumático lleno de biogás.
Procedimiento
1. Conexión de la sección de almacenamiento del biogás con el
biodigestor: A través de la manguera de acople se procede a conectar la
salida de gas del biodigestor (electroválvula con salida de ½”), con la
sección de almacenamiento de biogás (neumático con entrada de 1/8”).
2. Extracción del biogás: Proceso efectuado por la electroválvula y el control
de presión implementado, el objetivo de este es aliviar la presión en interior
del biodigestor. Estando conectados el biodigestor con la unidad de
almacenamiento, el gas se alojará en la unidad de almacenamiento que
previamente se encuentra sumergida en el recipiente de medición por
desplazamiento de agua y sujeto por una malla.

111
3. Cuantificación del biogás: Una vez almacenado el gas, se asume que el
gas extraído es de baja compresibilidad, por lo tanto se establece que el
volumen del gas extraído corresponde a la diferencia de volumen del agua.
2 2H O H O neumatico mallaV inicial V V V (24)
2 2BIOGAS H O H OV V final V inicial (25)
Anexo 4. Código adquisición y transmisión de los datos obtenidos por el conversor análogo digital del arduino
int analogValue = 0;
int i;
void setup()
Serial.begin(9600); // abre el puerto serie at 9600 bps
void loop()
for (i = 0; i<=5; i++) // lee la entrada analoga en multiplexacion
analogValue = analogRead(i);
Serial.print(i); // imprime en el serial
Serial.print("=");
Serial.println(analogValue);
delay(1000); // retardo de 1 segundo antes de la siguiente lectura

112
Anexo 5. Características del sistema embebido Raspberry pi2 y Arduino uno
Sistema Características
Raspberry pi2
Arduino uno
Precio en dólares. $50 $30
Tamaño 8.6 cm*5.4 cm*1.7 cm 7.6 cm*1.9 cm*6.4cm
Memoria 512 MB 0.002 MB
Velocidad de reloj 700 MHz 16 MHz
On Board Network 10/100 wired Ethernet RJ45
Ninguna
Multitarea Si No
Voltaje de entrada 5 V 7 a 12 V
Memoria Flash Tarjeta SD( 2 a 16 G) 32 KB
Puertos USB Dos Uno
Sistema operativo Distribuciones de Linux Ninguno
Entorno de desarrollo integrado(IDE)
Scratch, IDLE, cualquiera con soporte
Linux
Arduino

113
Anexo 6. Lectura de los sensores, procesamiento y control de las
variables asociadas
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
const int Sensor = 0; // Pin que lee la temperatura
int index = 0; // Posicion a escribir
const int N = 32 ; // Numero de muestras a considerar
float Buffer[N];
const int Sensor2 = 1; // Pin que lee la presion
int index2 = 0; // Posicion a escribir
const int N2 = 1; // Numero de muestras a considerar
float Buffer2[N2];
const int Sensor3 = 2; // Pin que lee la presion
int index3 = 0; // Posicion a escribir
const int N3 = 1; // Numero de muestras a considerar
float Buffer3[N3];
float Set_P=35;
/////////////////////////////////////////////////////////SP temperatura////////////////////////////////////////
float Set_P2=0.2;
/////////////////////////////////////////////////////////SP presion//////////////////////////////////////////////
float Rango=5;
float Rango2=0.05;
float Temp;
float Pres;
float Lim_inf = Set_P - Rango;
float Lim_sup = Set_P + Rango;
float Lim_inf2 = Set_P2 - Rango2;
float Lim_sup2 = Set_P2 + Rango2;
void setup (void)
lcd.begin(16, 2);
Serial.begin (9600);
pinMode(9,OUTPUT);

114
pinMode (8, OUTPUT);
void loop ()
/*
temperatura();delay(200);
presion();delay(200);
temperatura();delay(200);
presion();delay(200);
temperatura();delay(200);
presion();delay(200);
temperatura();delay(200);
presion();delay(200);
*/
tambiente();
void temperatura ()
//////////////////////////////////////////Lectura Temperatura//////////////////////////////////////////
char g=0b11011111;
float lectura = analogRead(Sensor);
delay (100);
Temp=(lectura-201.5748031)/2.048;
//Buffer[ index] = Temp;
//index = ++index % N;
Serial.print(lectura);
//float Tmedia = 0;
//for (int i=0 ; i< N ; i++)
// Tmedia = Tmedia + Buffer[i];
// float Tnueva=( Tmedia / N);
float Tnueva=(Temp);
delay(100);
//////////////////////////////////////////Control ON OFF temperatura//////////////////////////////////////////
if (Tnueva<Lim_inf)
digitalWrite(9,HIGH);
lcd.setCursor(9,0);
lcd.print(" CALENT");
if (Tnueva>Lim_sup)
115
digitalWrite(9,LOW);
lcd.setCursor(9,0);
lcd.print(" ENFRIA");
else if (Lim_inf < Tnueva < Lim_sup)
Serial.print("Temperatura(Celsius)=");Serial.println(Tnueva);
lcd.setCursor(0,0);
lcd.print("T=");
lcd.print(Tnueva);
lcd.print(g);
lcd.print("C");
delay (100);
void presion ()
//////////////////////////////////////////Lectura Presión//////////////////////////////////////////
float lectura2 = analogRead(Sensor2);
delay (100);
Pres=(lectura2-201.5748031)/14.12046174;
//Buffer2[index2] = Pres;
//index2 = ++index2 % N2;
Serial.print(lectura2);
//float Pmedia = 0;
//for (int i=0 ; i< N2 ; i++)
// Pmedia = Pmedia + Buffer2[i];
// float Pnueva=( Pmedia / N2);
float Pnueva=(Pres);
delay(100);
//////////////////////////////////////////Control ON OFF Presión//////////////////////////////////////////
if (Pnueva>Lim_sup2)
digitalWrite(8,HIGH);
lcd.setCursor(10,1);
lcd.print("ABRIR ");
while(Pnueva>Lim_sup2)
presion ();
if (Pnueva<Lim_inf2)

116
digitalWrite(8,LOW);
lcd.setCursor(10,1);
lcd.print("CERRAR");
else if (Lim_inf2 < Pnueva < Lim_sup2)
Serial.print("Presion(psi)=");Serial.println(Pnueva);
lcd.setCursor(0,1);
lcd.print("P=");
lcd.print(Pnueva);
lcd.print("psi ");
delay (100);
void tambiente ()
//////////////////////////////////////////Lectura Temp ambiente//////////////////////////////////////////
float lectura3 = analogRead(Sensor3);
delay (100);
char g=0b11011111;
//float voltaje = 5.0 /1024 * lectura3 ;
//float Tamb = voltaje * 100 -5 ;
float Tamb= ((5.0*lectura3*100.0)/128.0);
Buffer3[index3] = Tamb;
index3 = ++index3 % N3 ;
Serial.print(lectura3);
float Tambmedia = 0 ;
for (int i=0 ; i< N3 ; i++)
Tambmedia = Tambmedia + Buffer3[i] ;
float Tambnueva=( Tambmedia / N3);
delay(100);
Serial.print("Temperatura ambiente(Celsius)=");Serial.println(Tambnueva);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Ambiente=");
lcd.setCursor(0,1);
lcd.print(Tambnueva);
lcd.print(g);

117
lcd.print("C");
delay (100);
//lcd.clear();
delay (500);
Anexo 7. Código del script temp.py
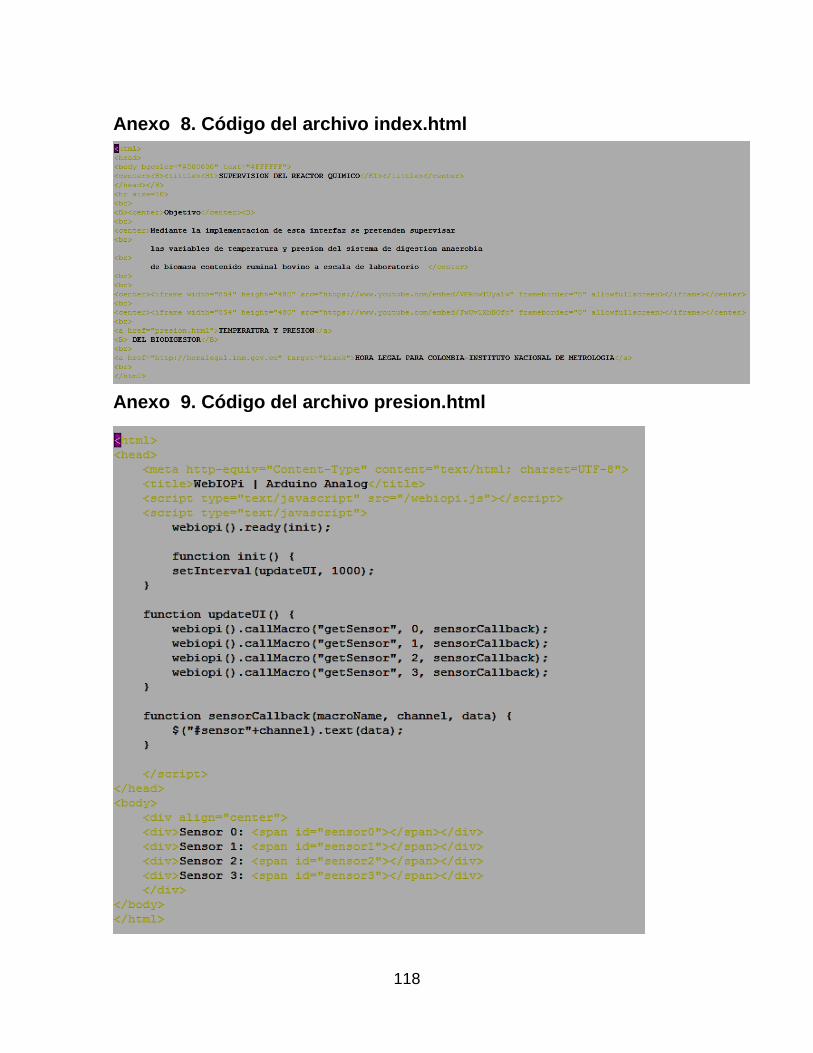
118
Anexo 8. Código del archivo index.html
Anexo 9. Código del archivo presion.html
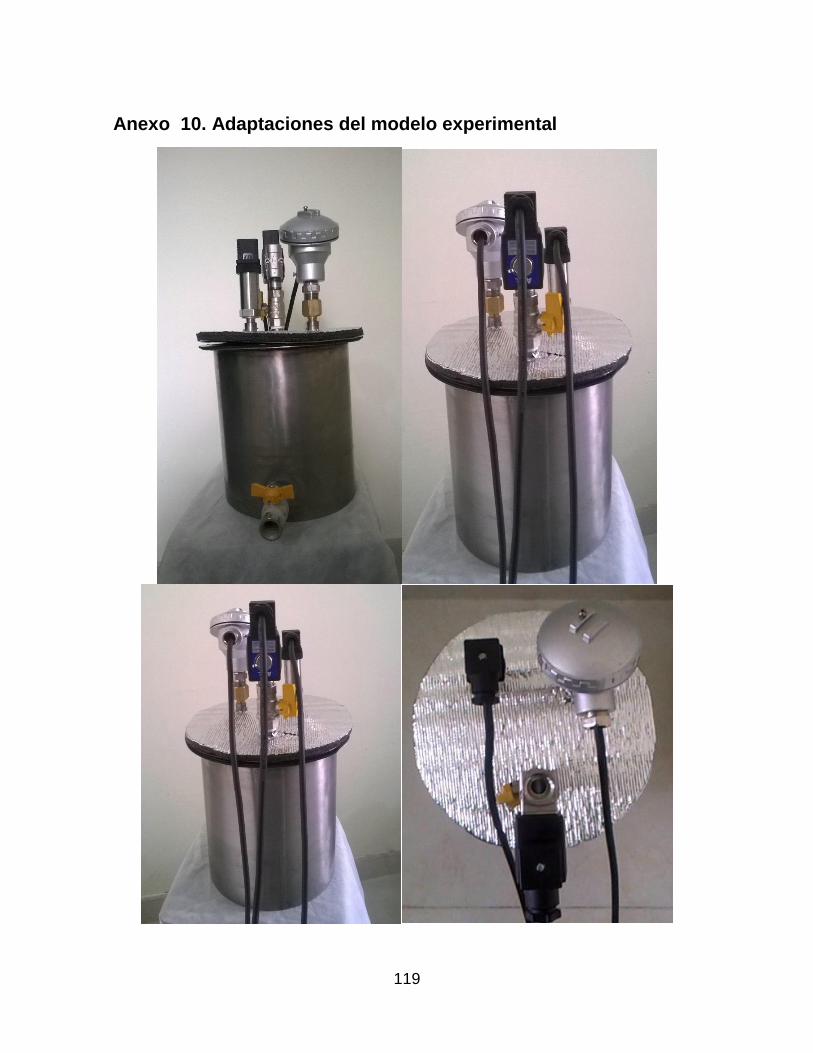
119
Anexo 10. Adaptaciones del modelo experimental

120
Anexo 11. Segmento codigo control tiempo de proceso
#include <Wire.h>
#include <TimeLib.h>
#include <RTCLib.h>
void setup()
pinMode(A3, OUTPUT);
digitalWrite(A3, HIGH);
pinMode(A2, OUTPUT);
digitalWrite(A2, LOW);
Serial.begin(9600);
while (!Serial);
delay(200);
void loop()
struct tm datetime;
if(RTC.read(datetime))
a=(datetime.tm_mday);
delay(1000);
if(a>=37)
digitalWrite(7,HIGH);