Diseno de Maquina Trilladora

of 102
-
Upload
esteban-lopez-inocente -
Category
Documents
-
view
53 -
download
0
Transcript of Diseno de Maquina Trilladora
-
TECNOLOGICO DE ESTUDIO SUPERIORES
DE JILOTEPEC
OPCIN I: TESIS PROFESIONAL
DISEO DE UN CABEZAL
PARA MQUINA TRILLADORA
DE GRANOS FINOS
(AVENA, TRIGO Y CEBADA).
T E S I S P R O F E S I O N A L
PARA OBTENER TTULO DE:
INGENIERO MECATRNICO
P R E S E N T A:
AARN ARREDONDO SNCHEZ
MAURICIO MIRANDA MARTNEZ
ABEL ALEJANDRO SNCHEZ SNCHEZ
ASESOR: ING. BERNARDO FLORES SANTIBANEZ
JILOTEPEC DE MOLINA ENRQUEZ, EDO. DE MXICO
DICIEMBRE DEL 2014
-
i
-
ii
DEDICATORIA
Aarn Arredondo Snchez
Dedico esta tesis a mis padres Aarn y Francisca porque sin ellos jams habra
terminado mi carrera.
A mis hermanos Abraham y Adrin que han estado conmigo desde tiempos
inmemoriales.
A mis maestros por su esfuerzo.
A mis compaeros, con quienes compart el agradable viaje.
A quienes sin su apoyo logre presentar esta tesis.
Mauricio Miranda Martnez
A mis padres Guillermo Miranda Rivas y Juana Martnez Miranda a quienes
admiro, quiero y respeto, ya que, siempre me han enseado excelentes valores,
como el estar unidos ante cualquier problema, luchar para salir adelante y as
poder cumplir mis metas y propsitos en la vida, gracias por instruirme a pesar y
no esperar a que me den el pescado. Gracias por su interminable paciencia,
gracias por sus consejos y apoyo.
Abel Alejandro Snchez Snchez
A las personas que me han dado la vida, por su apoyo incondicional y mediante su
ejemplo he llegado a ser lo que soy hoy. Gracias por su esfuerzo y apoyo
incondicional en mi superacin. Gracias Antoln Snchez Garca y Carmen
Snchez Rodea, mis amados padres.
-
iii
AGRADECIMIENTOS
A mis padres
Le doy gracias a dios por haberme dado unos padres de buen corazn y les doy
gracias a ustedes por el esfuerzo que hacen a diario para que no me falte nada,
los amo con todo mi corazn mam y pap.
A mis amigos
Les adeudo la paciencia de tolerarme las espinas ms agudas los arrebatos del
humor. La negligencia, las vanidades, los temores y las dudas.
A mis profesores
Son parte esencial de este logro, el cual les comparto, ya que ustedes tambin lo
trabajaron y espero que su esfuerzo y empeo se vea reflejado en este trabajo.
-
iv
NDICE GENERAL DEDICATORIA .................................................................................................... ii
AGRADECIMIENTOS ........................................................................................ iii
NDICE GENERAL ............................................................................................. iv
INDICE DE FIGURAS ....................................................................................... vii
RESUMEN .......................................................................................................... ix
CAPITULO I PRESENTACIN DEL PROYECTO ............................ 1
1.1 PLANTEAMIENTO DEL PROBLEMA ......................................................... 2
1.2 JUSTIFICACIN .......................................................................................... 2
1.3 OBJETIVOS ................................................................................................. 3
1.4 ALCANCES Y LIMITACIONES. ................................................................... 4
1.5 HIPOTESIS .................................................................................................. 5
CAPITULO II - MARCO TEORICO ...................................................... 6
2.1 Introduccin: ............................................................................................... 7
2.1.1 Tipos de tomas de fuerza segn modo de recibir el movimiento ..................................... 8
2.2 Variables ...................................................................................................... 8
2.2.1 Velocidad Angular ............................................................................................................ 8
2.2.2 Velocidad angular en movimiento circular uniforme ....................................................... 9
2.3 Tipos de tractores segn su potencia de salida .................................... 10
2.3.1 Introduccin .................................................................................................................... 10
2.3.2 Caractersticas de potencia y velocidad .......................................................................... 10
2.3.3 Caractersticas de acoplamiento ..................................................................................... 12
2.4 JUNTA CARDAN ....................................................................................... 14
2.4.1 Introduccin .................................................................................................................... 14
2.4.2 Partes de las Juntas Cardan ............................................................................................. 15
2.4.3 Junta cardan doble .......................................................................................................... 15
2.4.4 Indicaciones de operacin para la maquina Master Export Multipla estipuladas en el
manual de uso. .......................................................................................................................... 16
2.4.5 Estudios mecnicos de transmisin de la cardan a diferentes ngulos .......................... 17
2.5 TRANSMISIN POR CADENAS ............................................................... 18
2.5.1 Introduccin .................................................................................................................... 18
2.5.2 Elementos del sistema de transmisin por cadena ........................................................ 18
2.5.3 Relacin de transmisin .................................................................................................. 22
-
v
2.6 TRANSMISIN POR ENGRANES CNICOS ........................................... 23
2.6.1 Introduccin .................................................................................................................... 23
2.6.2 Tipos de engranes cnicos .............................................................................................. 24
2.6.2.1 Engranes cnicos rectos ............................................................................................... 24
2.6.2.2 Engrane cnico espiral ................................................................................................. 25
2.6.2.3 Engrane cnico zerol .................................................................................................... 25
2.6.2.4 Engranes cnicos hipoidales y engranes espiroidales.................................................. 25
2.7 TRANSMISIN POR CORREAS ............................................................... 26
2.7.1 Introduccin .................................................................................................................... 26
2.7.2 Clasificacin ..................................................................................................................... 27
2.7.3 Poleas .............................................................................................................................. 29
2.7.3.1 Ajuste de la distancia entre poleas .............................................................................. 30
2.7.3.2 Operacin de tensado .................................................................................................. 30
2.7.4 Relacin de transmisin .................................................................................................. 31
2.7.4.1 Dimetros de poleas .................................................................................................... 31
2.7.4.2 Distancia entre ejes ...................................................................................................... 32
2.7.4.3 Arco de contacto .......................................................................................................... 32
CAPITULO III CLCULOS ................................................................ 34
SECCION 1: TRANSMISION DE MOVIMIENTO DESDE LA TOMA DE FUERZA DEL TRACTOR HACIA EL CABEZAL DE LA TRILLADORA. ......... 35
3.1 Transmisin por eje cardan ..................................................................... 35
3.1.1 Estudio de transmisin a diferentes posiciones angulares. ............................................ 35
3.1.2 Estudio de transmisin a diferentes valores de alineacin angular . ........................... 38
3.1.3 Conclusiones de los clculos del eje cardan. ................................................................... 45
3.2 Transmisin de cadena primera seccin. .............................................. 46
3.2.1 Relacin de transmisin .................................................................................................. 47
3.3 Transmisin perpendicular por engranes cnicos. ............................... 48
3.4 Transmisin de poleas. ............................................................................ 49
3.5 Transmisin de cadena segunda seccin. ............................................. 52
3.6 Transmisin de cadena tercera seccin. ................................................ 54
3.7 Conclusiones. ........................................................................................... 56
SECCION 2: TRANSMISION DE MOVIMIENTO EN EL CABEZAL DE LA TRILLADORA. .................................................................................................. 57
-
vi
3.8 Transmisin. ............................................................................................. 59
3.8.1 Transmisin perpendicular de engranes cnicos. ............................................................ 59
3.8.1.1 Calculo de la velocidad lineal de la cadena. ................................................................. 62
3.8.1.2 Calculo de la velocidad angular en las sprockets del sistema de acarreo. ................... 63
3.9 Sistema de acarreo. .................................................................................. 64
3.10 Sistema de corte ..................................................................................... 66
Conclusiones ................................................................................... 70
Bibliografa ....................................................................................... 72
GLOSARIO ........................................................................................ 73
ANEXOS............................................................................................ 76
Anexo A: Imgenes del cabezal terminado ................................................... 77
Anexo B: Etapas de diseo y construccin del cabezal para trilladora. ... 85
-
vii
INDICE DE FIGURAS Figura 1 Ejemplo de toma de Fuerza ...................................................................... 7 Figura 2 Componentes de la velocidad angular de un cuerpo rotante .................... 8 Figura 3 Elementos del eje cardan ........................................................................ 12 Figura 4 Despiece de un rbol de transmisin con juntas cardan ......................... 13 Figura 5 Seccin transmisin junta universal. ....................................................... 14 Figura 6 Despiece de eje cardan .......................................................................... 15 Figura 7 Junta cardan doble ................................................................................. 15 Figura 8 Vista superior de posicin angular .......................................................... 16 Figura 9 Graficas de la variacin de transmisin de velocidad angular cuando los planos formados entre los ejes de entrada y de salida no son paralelos. ............. 17 Figura 10 Graficas de la variacin de transmisin de velocidad angular cuando los planos formados entre los ejes de entrada y de salida son paralelos. .................. 17 Figura 11 Partes del eslabn de cadena ............................................................... 20 Figura 12 Sprockets cara plana ............................................................................ 21 Figura 13 Rueda tensora ...................................................................................... 22 Figura 14 Seccin caja de engranes cnicos helicoidales. ................................... 23 Figura 15 Tipos de engranes cnicos ................................................................... 24 Figura 16 Engrane cnico recto ............................................................................ 24 Figura 17 Engrane cnico espiral .......................................................................... 25 Figura 18 Engrane cnico hipoidales .................................................................... 26 Figura 19 Seccin transmisin por correas ........................................................... 27 Figura 20 Correa abierta ....................................................................................... 27 Figura 21 Correa cruzada ..................................................................................... 28 Figura 22 Correa con rodillo tensor externo .......................................................... 28 Figura 23 Correa con rodillo tensor interno ........................................................... 29 Figura 24 Colocacin de la correa en el canal de la polea .................................... 29 Figura 25 Transmisin de movimiento hacia el cabezal de corte .......................... 35 Figura 26 Vistas frontal, superior y lateral izquierda del eje cardan ...................... 36 Figura 27 Entrada y la salida de movimiento del eje cardan ................................. 36 Figura 28 Angulo de alineacin de las flechas a =0 .......................................... 37 Figura 29 Representacin de Junta cardan doble con ngulos (Alonso, 2011) .... 37 Figura 30 Flecha cardan y ubicacin de la toma de fuerza ................................... 38 Figura 31 Flecha cardan para estudio de transmisin de velocidad ..................... 38 Figura 32 Grafica Velocidad angular con respecto al tiempo ............................... 39 Figura 33 Grafica relacin de transmisin ............................................................. 39 Figura 34 Diferentes valores del ngulo de alineacin (posicin 1: = 35, posicin 2: =0, posicin 3: =35). ..................................................................... 40 Figura 35 Grafica sobre Velocidad Angular del eje ............................................... 41 Figura 36 Aceleracin angular del eje ................................................................... 41 Figura 37 Diagrama ngulo de deflexin mximo permisible (Dana Holding Corporation, 2010) ................................................................................................ 43 Figura 38 Grafica del comportamiento de la velocidad angular del eje cardan a distintos valores de (Wolfram Research, Inc, 2008). .......................................... 44 Figura 39 Primera seccin de transmisin por cadena ......................................... 46 Figura 40 Elementos de la primera seccin de transmisin por cadena ............... 46
-
viii
Figura 41 Transmisin de engranes ...................................................................... 48 Figura 42 Relacin de transmisin ........................................................................ 49 Figura 43 Transmisin de poleas .......................................................................... 49 Figura 44 Elementos de la transmisin de poleas ................................................. 50 Figura 45 Relacin de transmisin por correa....................................................... 50 Figura 46 Segunda seccin transmisin por cadena ............................................ 52 Figura 47 Elementos segunda seccin de trasmisin por cadena ........................ 52 Figura 48 Tercera seccin de transmisin por cadena ......................................... 54 Figura 49 Elementos de la tercera seccin de trasmisin por cadena .................. 54 Figura 50 Transmisin mecnica .......................................................................... 56 Figura 51 Detalle del cabezal y sistema de transmisin ...................................... 57 Figura 52 Vista de los detalles internos del cabezal. (a) Vista superior, (b) vista frontal, (c) vista inferior. ......................................................................................... 58 Figura 53 Vista en detalle del acoplamiento entre el sistema de transmisin del tractor y el cabezal de corte .................................................................................. 59 Figura 54 Mecanismo de distribucin de movimiento y potencia al cabezal ......... 60 Figura 55 Sistema de transmisin de cadena ....................................................... 61 Figura 56 Vista inferior del sistema de distribucin ............................................... 62 Figura 57 Corona o sprocket del sistema de transmisin de cadena .................... 63 Figura 58 Vista en interna del accionamiento de sistema de acarreo ................... 64 Figura 59 Detalle del sistema de acarreo .............................................................. 64 Figura 60 Detalle del accionamiento del sistema de corte. ................................... 66 Figura 61 Relacin de transmisin de la transmisin de fuerza al sistema de corte del cabezal. ........................................................................................................... 67 Figura 62 Disposicin del mecanismo de manivela-biela-corredera para la simulacin dinmica. ............................................................................................. 68 Figura 63 Curva del desplazamiento lineal de la barra de cuchillas. ..................... 68 Figura 64 Curva de la velocidad lineal de la barra de cuchillas............................. 69 Figura 65 Curva de la aceleracin lineal en la barra de cuchillas. ........................ 69 Figura 66 Cabezal acoplado a la mquina. Vista frontal. ...................................... 70 Figura 67 Cabezal acoplado a la mquina. Vista lateral. ...................................... 71
-
ix
RESUMEN
El presente trabajo propone un nuevo diseo para un aditamento de
accionamiento mecnico capaz de aadir nuevas funciones a una mquina que
est pensada originalmente para otro tipo de trabajo. A travs de un estudio que
abarca desde la dinmica de mecanismos, clculos y simulaciones cinemticas,
hasta adaptaciones realizadas durante el propio proceso de manufactura, se crea
un nuevo concepto, el cual, si no est del todo exento de defectos de diseo que
llevan a producir vibraciones entre otros, si abre las puertas a experimentar con
diversas combinaciones de mecanismos que sean ms prcticas y funcionales.
Con lo anterior, se pretende instar a la innovacin y al desarrollo en todos los
campos de la industria que han sido relegados al segundo plano en pases en
desarrollo como es el caso de nuestra propia nacin.
-
1
CAPITULO I PRESENTACIN
DEL PROYECTO
-
2
1.1 PLANTEAMIENTO DEL PROBLEMA
En la actualidad casi no existen en el mercado maquinas trilladoras para granos
finos con un rea de trabajo pequea (2.5 metros), por lo que se requiere disear
un cabezal que cumpla con el proceso de corte y traslado de pastura de cereal el
cual ser un acoplamiento para la maquina trilladora Master Export Mltipla,
aprovechando las funciones de trillado de esta e implementando la funcin de
cosechadora de trigo, avena y cebada.
1.2 JUSTIFICACIN Debido a la gran necesidad de optimizar los recursos en el ramo de la agricultura
se pretende desarrollar una mquina que facilite el proceso de cosecha de granos
finos con el fin de hacer ms sencillo el trabajo de los agricultores.
Por tal motivo se pretende implementar a la mquina Master Export Mltipla una
herramental de corte de granos finos, ya que, solo tiene dos tipos de cabezales los
cuales son de cacahuate y de maz; al acoplarle el cabezal de granos finos esta
mquina podr abarcar cualquier tipo de trabajo relacionado a la trilla de granos.
De esta manera se pretende unificar y facilitar el trabajo de produccin de granos
significativamente, lo que permitir una mejor productividad a los agricultores de
la Zona Norte del Estado de Mxico.
La fcil implementacin de este sistema de cosechado y trillado a cualquier tractor
permitir al agricultor reducir costos en comparacin con lo que cuesta la renta de
una mquina de tipo industrial para realizar la misma tarea en su parcela; as los
agricultores pueden utilizar la maquinaria como aditamento sin la necesidad de
gastar para adquirir una maquina completa.
El cabezal a disear debe cubrir las funciones de corte y traslado de material a
trillar: avena, trigo y cebada, las cuales son semillas que se producen en la Zona
Norte del Estado de Mxico. Para los campesinos de estas zona se presenta una
gran complicacin para adquirir y manipular maquinaria de tipo industrial para su
parcela, que en la mayora de los casos solo abarcan unas cuantas hectreas, e
-
3
incluso ni siquiera alcanzan a cubrir ni cien metros cuadrados, por lo que la
maquina Master Export Multipla con cabezal de siega y acarreo para granos finos
se propone como una opcin viable para cubrir las necesidades que surgen para
dicha tarea y con costos razonables de adquisicin y manipulacin.
Se prev que los beneficios resultantes de la implementacin de este aditamento
se vern reflejados de manera inmediata en el trabajo de los agricultores, al
aumentar las funcionalidades de su tractor y al ahorrar tiempo y recursos
econmicos en la operacin del equipo de manera significativa.
1.3 OBJETIVOS
Objetivo general.
Para ofrecer una nueva forma de produccin de granos finos de mayor
rendimiento, se disear un cabezal para acoplarlo a la maquina trilladora Master
Export Multipla el cual tiene que realizar los procesos de corte y acarreo de
material al interior de la misma para poder trillarlo. As mismo, no deber de
entorpecer la movilidad que requiere la mquina para que los granos sean
procesados con el menor maltrato posible del grano.
Objetivos especficos.
Disear un cabezal que aada las funciones de siega y recoleccin de pastura de
cereal a la maquina trilladora Master Export Multipla.
Incorporar al diseo los sistemas de corte y acarreo de pastura de cereal, as
como un sistema de transmisin de fuerza que permita el accionamiento de los
diferentes mecanismos que integran al aditamento mecnico para la maquina
trilladora, el cual se ajuste a los lmites dimensionales y mecnicos necesarios
para el acoplamiento de los sistemas.
-
4
Lograr el correcto ajuste del sistema a la maquina trilladora para obtener los
beneficios previstos.
1.4 ALCANCES Y LIMITACIONES.
Alcances.
Se determinar la viabilidad del proyecto expuesto, su rentabilidad, sus ventajas
y su monto de inversin.
Se definir un plan estratgico para que el proyecto se realice en tiempo y forma.
Se diseara un cabezal que realice los procesos de corte y traslado de pastura
hacia la maquina Master Export Mltipla hacindola ms competente en el rea
del campo.
Lograr la rentabilidad proyectada en el campo agrcola en el tiempo determinado.
Fructificar la utilizacin de este mecanismo adicional a la maquina Master Export
Mltipla de manera gradual en toda la comunidad agrcola de la Zona norte del
Estado de Mxico
Limitaciones.
La inversin para el financiamiento de este proyecto ser por lo que se debe
economizar y buscar materiales de bajo costo y buena calidad.
Se debe contar con todos los instrumentos necesarios para llevar a cabo la
implementacin correcta del cabezal a la mquina para que ambas se articulen y
trabajen de manera paralela.
-
5
El cabezal deber de tener dimensiones pequeas para no estorbar la movilidad
de la mquina, el ancho debe ser adecuado (2.4 metros) y debe de encajar
correctamente a la mquina Master Export Mltipla.
1.5 HIPOTESIS
Disear un cabezal que corte y traslade el material a trillar (trigo, avena y cebada)
a los sistemas de acarreo y trillado, existentes en la maquina Master Export
Multipla implementando mecanismos o diseando sistemas mecnicos nuevos
que realicen dichas tareas. Se tiene una limitante para el diseo final del cabezal
con respecto al espacio disponible entre el eje cardan y la maquina en s (largo 2.5
m, ancho 1.5 m, alto 1 m).
Basndose a los sistemas de corte ya existentes en mquinas similares (navajas
de corte, tambores de corte rotatorios, etc.) se comprobaran sus caractersticas
generales para acoplarlas a las limitantes existentes de trabajo.
Para el mecanismo de traslado del material, se compararn varios tipos de
sistemas existentes que realizan dicha funcin en equipos similares de produccin
agrcola (molinete, bandas, cadenas de arrastre, tornillo sin fin, etc.) para
descartar los menos factibles para el diseo e implementarlos a todo lo largo del
rea de trabajo disponible y que desarrolle su funcin con la mayor eficiencia
posible.
Una vez establecidos los apartados anteriores (corte y traslado) y adaptados a
nuestras limitantes, se diseara su sistema de accionamiento el cual deber ser
mecnicamente simple y eficiente, y que sus dimensiones no impidan el libre
funcionamiento de ambos trabajos.
-
6
CAPITULO II - MARCO TEORICO
-
7
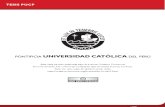
2.1 Introduccin: Qu es la toma de fuerza de un tractor?
Es un eje en rotacin que transmite energa para el accionamiento de las
mquinas acopladas al tractor, situado normalmente en la parte posterior del
mismo, como se puede observar en la figura 1.
Adems de este eje constituyen los componentes necesarios para dicho
accionamiento un rbol de transmisin articulado mediante juntas universales
para permitir el cambio en direccin de la transmisin de fuerza y un eje
telescpico, conjunto denominado como eje cardn.
La velocidad de rotacin de la toma de fuerza depende del rgimen de giro del
motor necesario para que la mquina pueda realizar la tarea requerida. De forma
que a mayor velocidad del motor tiene a su salida mayor velocidad la toma de
fuerza y, viceversa. En un principio la velocidad estaba normalizada solamente a
540 rpm. Con la aparicin de los tractores de gran potencia, se aument la
velocidad normalizada a 1000 rpm.
Figura 1 Ejemplo de toma de Fuerza
-
8
2.1.1 Tipos de tomas de fuerza segn modo de recibir el movimiento La toma de fuerza del cambio de velocidades:
Procede del eje intermediario de la caja de cambios y por tanto, se desconecta
cuando se pisa el pedal de embrague.
Toma de fuerza del motor o independiente: recibe movimiento directamente del
motor a travs de un embrague propio, mediante un embrague independiente o
doble. En este caso el tractor puede detenerse y volver a avanzar sin que la
toma de fuerza se detenga y, por tanto, la mquina que est accionando.
Toma de fuerza sincronizada acoplada al eje secundario:
Utilizada para el accionamiento de los ejes motores de los remolques de ruedas
accionadas. As la velocidad del tractor y remolque accionado es la misma con
independencia de la marcha seleccionada.
2.2 Variables
2.2.1 Velocidad Angular
Figura 2 Componentes de la velocidad angular de un cuerpo rotante
La velocidad , siendo tangente al crculo, es perpendicular al radio = .
Cuando medimos distancias a lo largo de la circunferencia del crculo como
resultado del desplazamiento angular, tenemos que es = .
-
9
Considerando el hecho de que permanece constante, obtenemos
=
= /
La cantidad = / se denomina velocidad angular, y es igual a la variacin
del ngulo descrito en la unidad de tiempo. Se expresa en radianes por segundo
1, o simplemente 1.
=
2.2.2 Velocidad angular en movimiento circular uniforme La velocidad angular es la rapidez con la que vara el ngulo en el tiempo y se
mide en radianes / segundos. (2 [radianes] = 360)
Por lo tanto si el ngulo es de 360 grados (una vuelta) y se realiza por ejemplo en
un segundo, la velocidad angular es: 2 [rad / s].
Si se dan dos vueltas en 1 segundo la velocidad angular es 4 [rad / s].
Si se da media vuelta en 2 segundos es 1/2 [rad / s].
La velocidad angular se calcula como la variacin del ngulo sobre la variacin del
tiempo.
= /
Considerando que la frecuencia es la cantidad de vueltas sobre el tiempo, la
velocidad angular tambin se puede expresar como:
= 2
En MCU (Movimiento Circular Uniforme) la velocidad angular es constante.
-
10
2.3 Tipos de tractores segn su potencia de salida
2.3.1 Introduccin
El tractor es la principal fuente para desarrollar energa en la produccin
agropecuaria. Es una maquina autopropulsada diseada principalmente para
ejercer traccin, ya sea tirando, empujando o arrastrando otras mquinas y/o
equipos.
Los tractores modernos realizan otras funciones adicionales como transmitir
movimientos de rotacin a travs de ejes o poleas a una maquina estacionaria o
mvil como en nuestro caso la maquina a la que se acoplara el cabezal.
Adems, puede levantar cargas a travs del sistema hidrulico montado en el
tractor o en forma remota, y suministrar energa elctrica para accionar ciertos
accesorios en algunos implementos.
Bsicamente, esta mquina est constituida por una unidad de potencia, una
unidad de transmisin, una unidad de aprovechamiento de su potencia y por los
diversos mandos y controles para facilitar su operacin.
2.3.2 Caractersticas de potencia y velocidad
El cabezal de corte y recoleccin est pensado para ser usado en una maquina
trilladora de semillas la cual es accionada a travs de la toma de fuerza de un
tractor pequeo designado para actividades agrcolas. Las salidas de potencia
dependen de la capacidad del motor del mismo tractor.
Los tractores agrcolas pueden clasificarse por el nmero de revoluciones por
minuto entregadas en su salida de la toma de fuerza, estando estas en dos rangos
de trabajo. Las salidas oscilan entre las 540/1000 rpm, las cuales son entregadas
por medio de una caja de velocidades en el mismo tractor.
-
11
Tambin pueden clasificarse estos por la potencia mxima en la toma de fuerza,
tambin conocida como barra de tiro.
Segn ASABE (Sociedad Americana de Ingenieros Agrcolas y Biolgicos) se
establece una relacin de categoras de tractores segn la potencia que entregan
como se muestra en la Tabla 1.
Categora Potencia mxima en la barra de tiro
kW HP
0
-
12
2.3.3 Caractersticas de acoplamiento
Para el acoplamiento entre la toma de fuerza del tractor y la toma de fuerza de la
maquina trilladora se usa un mecanismo de junta universal a travs del cual se
realiza la transmisin de fuerza por medio de juntas universales (Figura 3).
Figura 3 Elementos del eje cardan
Cardanes y juntas universales La juntas cardan son las ms empleadas en la actualidad, ya que pueden
transmitir un gran par motor y permite desplazamientos angulares de hasta 15 en
las de construccin normal, llegando hasta los 25 en las de construccin especial.
Tienen el inconveniente de que cuando los ejes giran desalineados quedan
sometidos a variaciones de velocidad angular y, por tanto, a esfuerzos alternos
que aumentan la fatiga de los materiales de los que estn construidos.
La oscilacin de la velocidad es mayor cuanto mayor sea el ngulo) aunque,
normalmente, este ngulo en los vehculos es muy pequeo y, por tanto, las
variaciones de velocidad son prcticamente despreciables.
La junta cardan est constituida por dos horquillas (1) unidas entre s por una
cruceta (2), montada sobre cojinetes de agujas (3) encajados a presin en los
alojamientos de las horquillas y sujetos a ellas mediante circlips o bridas de
retencin (4).
Una de las horquillas va unida al tubo de la transmisin (9) y la otra lleva la brida
de acoplamiento para su unin al grupo propulsor del puente. En el otro lado del
tubo, la junta cardan va montada sobre una unin deslizante, formada por un
-
13
manguito (5) estriado interiormente que forma parte de una de las horquillas; cmo
se observa en la Figura 4.
Figura 4 Despiece de un rbol de transmisin con juntas cardan
Estos rboles no sufren, generalmente, averas de ningn tipo, salvo rotura del
propio rbol, en cuyo caso hay que cambiar el conjunto, ya que no admite
reparacin. El nico desgaste que puede sufrir est en los cojinetes de la cruceta,
donde se procede a cambiar la cruceta.
La proteccin del acoplamiento estriado asegura el casquillo guardapolvo (7) y el
engrase de las articulaciones de la junta cardan se efecta con grasa consistente
por los engrasadores (8).
-
14
2.4 JUNTA CARDAN
2.4.1 Introduccin
La junta cardan es un sistema de transmisin esfrico con una relacin de
transmisin no uniforme, generalmente se montan por parejas, de forma que la no
uniformidad de la primera junta se compensa con la segunda.
Consiste en una junta mecnica formada por dos horquillas que estn unidas entre
s por un elemento con forma de cruz donde cada horquilla articula con una de las
aspas de la cruz, en la figura 5 se muestra la junta cardan que se utiliza en la
mquina.
Figura 5 Seccin transmisin junta universal.
-
15
2.4.2 Partes de las Juntas Cardan
Las partes que conforman una junta cardan son las siguientes:
1 Horquilla
2 Cruceta o cruz
3Dados
Tal y como se muestra en la Figura 6.
2.4.3 Junta cardan doble
Para solucionar los problemas de uniformidad de la junta cardan, se montan por
parejas: una a derecha y otra a izquierda (En la figura 7 podemos observar un
ejemplo).
Figura 7 Junta cardan doble
En las juntas cardan dobles o en las simples montadas por parejas se pueden
evitar las fluctuaciones de velocidad generadas por las juntas simples.
Figura 6 Despiece de eje cardan
-
16
Cuando 1 2 nos es posible la compensacin siempre y cuando no se excedan
los lmites
=1
2 =
2
1
Para mantener la relacin de transmisin de velocidades constante, en las juntas
cardan montadas por parejas, se debe asegurar:
Las juntas simples deben orientarse correctamente, es decir, las horquillas
interiores deben alinearse como en las juntas dobles.
El ngulo de trabajo de ambas juntas debe ser el mismo o casi el mismo
2.4.4 Indicaciones de operacin para la maquina Master Export Multipla estipuladas en el manual de uso.
En el manual de instrucciones de esta mquina existe una indicacin de uso con
respecto a la posicin de trabajo de la flecha cardan en la cual recomienda:
El ngulo 0 es la lnea de centro del tractor. El ngulo mximo permitido para el
cardan de la recogedora en movimiento, es de 35 (ver Figura 8).
Si se sobrepasa este valor (ejemplo: maniobras), desactive la toma de fuerza.
Figura 8 Vista superior de posicin angular
Tal recomendacin se tomar como referencia para los clculos de transmisin cinemtica.
-
17
2.4.5 Estudios mecnicos de transmisin de la cardan a diferentes ngulos Como se puede observar en las Figuras 9 y 10, la variacin de transmisin de
velocidad se ve afectada por la diferencia de los ngulos entre los planos
formados por los ejes de entrada y salida en la junta cardan doble como se ilustra
en la Figura 8.
Figura 9 Graficas de la variacin de transmisin de velocidad angular cuando los planos formados entre los ejes de entrada y de salida no son paralelos.
Si los ngulos de entrada y salida de la junta universal son iguales se cumple con
la compensacin tanto de transmisin de velocidad angular como de fuerza (ver
figura 10, grafico superior).
Figura 10 Graficas de la variacin de transmisin de velocidad angular cuando los planos formados entre los ejes de entrada y de salida son paralelos.
-
18
2.5 TRANSMISIN POR CADENAS
2.5.1 Introduccin
Las cadenas de transmisin son la mejor opcin para aplicaciones donde se
quiera transmitir grandes pares de fuerza, y movimiento entre dos ejes paralelos
que se encuentran alejados entre s, las diferentes configuraciones de los
elementos que la componen hacer variar la funcin final del sistema, el sistema
puede tener la finalidad de transmitir movimiento entre los ejes, servir como
sistemas de elevacin o como sistemas transportadores.
Estos sistemas constituyen uno de los mtodos ms eficientes utilizados para
transmitir potencia mecnica, dado que los dientes de las ruedas dentadas evitan
que la cadena resbale, esta condicin les da ms capacidad de transmisin y las
hace ms confiables.
El sistema consta de dos ruedas dentadas y un miembro deformable formado por
una serie de eslabones rgidos que pueden tener un giro relativo entre ellos los
cuales constituyen una cadena, ver figura10. Estos sistemas trasmiten el
movimiento entre los ejes por medio del empuje generado entre los eslabones de
la cadena y los dientes de las ruedas, que en la prctica se conocen como
sprockets.
2.5.2 Elementos del sistema de transmisin por cadena
El sistema de transmisin por cadena se compone de diversos elementos,
dependiendo de su configuracin. La configuracin ms comn se compone de
dos sprockets (rueda dentada) y una cadena de eslabones, aunque en la prctica
con el objetivo de evitar que la cadena se salga de las ruedas dentadas que
arrastra, se emplean mecanismos de tensin para mantener la tensin de la
cadena.
-
19
2.5.2.1 Componentes de la cadena
De forma individual las cadenas se componen de eslabones que a su vez incluyen
una serie de elementos que pueden variar en forma y cantidad en funcin del tipo
de cadena. Para el caso de las cadenas de rodillos, se incluyen placas o bridas
interiores y exteriores, bujes o rodillos y en algunos casos pines para garantizar la
unin de los elementos. Los componentes de la cadena los podemos observar en
la figura 11.
Placa exterior e interior
La placa es un componente que soporta la tensin que se ejerce en la cadena.
Estas generalmente estn sometidas a cargas de fatiga y acompaado a veces
por fuerzas de choque. Por lo tanto, la placa debe tener no solamente gran fuerza
extensible esttica, sino que tambin debe soportar a las fuerzas dinmicas de las
cargas de choque. Adems, la placa debe soportar condiciones ambientales, las
que podran provocar por ejemplo, corrosin, abrasin, etc.
Pasador
El pasador est conforme a las fuerzas que se ejercen sobre ella y de flexiones
transmitidas por la placa. Este a su vez acta junto al casquillo como arco de
contacto de los dientes del pin, cuando las flexiones de la cadena se ejercen
durante el contacto con el pin. Por lo tanto, las necesidades del pasador deben
soportar toda la fuerza de transmisin, resistencia a la flexin, as como
resistencia contra fuerzas de choque.
Casquillo
El casquillo es de estructura slida y se rectifican si son curvados, con el resultado
que da una base cilndrica perfecta para el rodillo. Esta caracterstica maximiza la
-
20
duracin del rodillo en condiciones de alta velocidad y da una seguridad ms
consistente de la placa interior sobre el casquillo.
Rodillo
El rodillo est sometido a la carga de impacto cuando est en contacto con los
dientes del pin con la cadena. Despus del contacto, el rodillo cambia su punto
del contacto y de balance. Se sostiene entre los dientes del pin y del casquillo, y
se mueve en la cara del diente mientras que recibe una carga de compresin.
Adems, la superficie interna del rodillo constituye una pieza del cojinete junto con
la superficie externa del buje cuando el rodillo rota en el carril. Por lo tanto, debe
ser resistente al desgaste, fatiga, y compresin.
Figura 11 Partes del eslabn de cadena
2.5.2.2 Sprockets o Ruedas dentadas
De forma tcnica los sprockets o ruedas dentadas para transmisin por cadenas
se pueden clasificar en dos tipos, las sprockets comerciales y sprockets de
precisin.
-
21
Cuando las velocidades son moderadas se pueden usar sprockets comerciales,
pero cuando la velocidad es alta con altas cargas se recomienda usar sprockets
de precisin. La figura 12 nos muestra un ejemplo de sprocket.
Figura 12 Sprockets cara plana
2.5.2.3 Mecanismos de tensin
En algunas ocasiones especiales se suelen emplear algunos mecanismos para
brindar una adecuada tensin y evitar que la cadena se descarrile, en casos
donde se presenta alguna vibracin u ondulacin de la cadena.
Algunos de los mecanismos empleados para tensar las cadenas son: ruedas
tensoras, patines gua, tensores hidrulicos o ruedas deformables que tienen la
misma finalidad.
Dado que todos los mecanismos de tensin de la cadena tienen la misma finalidad
y por cuestiones de comodidad utilizaremos ruedas tensoras, ya que nos permiten
llegar al grado de tencin necesario con mucha facilidad y absorben movimientos
innecesarios de la cadena.
Ruedas tensoras: Estas ruedas se ubican en el lado flojo de la cadena y se
desplazan de forma tal que tensen un poco la cadena, en algunos casos incluyen
muelles para absorber alguna oscilacion de la cadena. En la figura 13 podemos
observar la colocacion de una rueda tensora.
-
22
Figura 13 Rueda tensora
2.5.3 Relacin de transmisin
La relacin de transmisin en el caso del sistema de transmisin por cadena, es el
cociente entre el nmero de dientes de la rueda conducida (rueda arrastrada) y el
nmero de dientes de la rueda conductora (rueda motriz). La relacin de
transmisin tambin se puede expresar en trminos de la velocidad de rotacin de
las ruedas.
=21
= 1/2
-
23
2.6 TRANSMISIN POR ENGRANES CNICOS
2.6.1 Introduccin Los engranes cnicos permiten que los ejes trabajen en ngulo, casi siempre de
90. Los dientes pueden ser rectos o en espiral. Al igual que con los engranes
cilndricos, los de dientes rectos provocan ms ruido y vibraciones. Los de dientes
en espiral, por su parte, requieren mayor precisin en la alineacin y permiten
menos juego interno en los rodamientos, los engranes cnicos a menudo son
empleados en relacin 1:1 para crear derivaciones en la transmisin, que permiten
sincronizar diversas partes de una mquina. En la figura 14 se muestra la seccin
de engranes cnicos utilizados.
La relacin mxima en reductores estndar es de 7:1 aproximadamente en un
juego de engranes cnicos. Para ampliar la gama de relaciones de velocidad se
puede combinar un paso cnico con uno o ms pasos cilndricos, efectan la
transmisin de movimiento de ejes que se cortan en un mismo plano,
generalmente en ngulo recto, por medio de superficies cnicas dentadas. Los
dientes convergen en el punto de interseccin de los ejes.
Figura 14 Seccin caja de engranes cnicos helicoidales.
-
24
2.6.2 Tipos de engranes cnicos Los engranes cnicos se clasifican como sigue:
Engranes cnicos rectos
Engranes cnicos espirales
Engranes cnicos Zerol
Engranes hipoidales
Engranes espiroidales La figura 15 muestra la posicin con la que se colocan respectivamente cada tipo de engrane cnico.
Figura 15 Tipos de engranes cnicos
2.6.2.1 Engranes cnicos rectos
Por lo general, tales engranes se emplean para velocidades en la lnea de paso de
hasta 1 000 pies/min (5.08 m/s) cuando el nivel de ruido no es una consideracin
importante. Estn disponibles en muchos tamaos comerciales y su costo de
produccin es menor que otros engranes cnicos, en especial en pequeas
cantidades, Ver figura 16.
Figura 16 Engrane cnico recto
-
25
2.6.2.2 Engrane cnico espiral
Estos engranes se recomiendan para desarrollar velocidades mayores y donde el
nivel de ruido sea un elemento de consideracin. Los engranes cnicos espirales
representan la contraparte cnica del engrane helicoidal. En la figura 17 vemos un
ejemplo de engrane cnico espiral.
Figura 17 Engrane cnico espiral
2.6.2.3 Engrane cnico zerol
Es un engrane patentado con dientes curvos pero con un ngulo de espiral con
valor de cero. Las cargas de empuje axial permisibles para los engranes Zerol no
son tan grandes como para el engrane cnico espiral, y por ello a menudo se
utilizan en lugar de los engranes cnicos rectos. El engrane cnico Zerol se
genera mediante la misma herramienta empleada para los engranes cnicos en
espiral normales. Para propsitos de diseo, se llevar a cabo el mismo
procedimiento que en los engranes cnicos rectos, y despus simplemente se
introducir un engrane Zerol.
2.6.2.4 Engranes cnicos hipoidales y engranes espiroidales Son engranes similares a los de tipo cnico pero con los ejes desplazados. En
este caso se denominan engranes hipoidales, debido a que sus superficies de
paso son hiperboloides de revolucin. La accin de los dientes entre dichos
-
26
engranes se lleva a cabo por una combinacin de rodadura y deslizamiento en
lnea recta y tiene mucho en comn con la de los engranes de tornillo sinfn.
Figura 18 Engrane cnico hipoidales
En la imagen 18 se ve que el engrane hipoidal tiene un desplazamiento de eje
relativamente pequeo. Para separaciones mayores, el pin empieza a
parecerse a un tornillo sinfn ahusado y, por lo tanto, al conjunto se le conoce
como engrane espiroidal.
2.7 TRANSMISIN POR CORREAS
2.7.1 Introduccin Las correas se utilizan para transmitir movimiento de rotacin y potencia entre
rboles de poleas normalmente paralelos, entre los cuales no es preciso mantener
una relacin de transmisin exacta y constante.
El hecho de no poder exigir una relacin de transmisin exacta y constante se
debe a que en estas transmisiones hay prdidas debido al deslizamiento de las
correas sobre las poleas.
-
27
Dicho deslizamiento no es constante sino que vara en funcin de las condiciones
de trabajo, es decir, de los valores de par transmitido y de la velocidad de la
correa. En la figura 19 se muestra la seccin de transmisin por correas utilizada.
Las transmisiones por medio de correas son denominadas de tipo flexible pues
absorben vibraciones y choques de los que slo tienden a transmitir un mnimo al
eje arrastrado. Son estas transmisiones adecuadas para distancias entre ejes
relativamente grandes, adems son silenciosos.
Figura 19 Seccin transmisin por correas
2.7.2 Clasificacin Transmisin por correa abierta:
Es la ms comn y se emplea en rboles paralelos si el giro en ambos se realiza
en el mismo sentido. En la figura 20 se muestra la posicin de la correa para
transmisor por correa abierta.
Figura 20 Correa abierta
-
28
Transmisin por correa cruzada:
Tambin se emplea en rboles paralelos aunque solo si se desea que stos giren
en sentidos opuestos. Se debe de procurar que en la zona de cruce, no exista
contacto entre los ramales de la correa, ya que de ser as se producira un fuerte
desgaste. Para evitar esto se recomienda que la distancia entre ejes sea mayor
que 35 a 30 veces el ancho de la correa (Ver figura 21).
Figura 21 Correa cruzada
Transmisin por correa con rodillo tensor exterior:
Mediante esta configuracin se puede tensar la correa, aumentando el ngulo de
contacto entre correa y polea. De esta manera podemos transmitir mayor cantidad
de potencia por el mayor ngulo de contacto polea-correa, aunque tambin
disminuimos la vida til de la correa por aumentar el desgaste de la misma. La
figura 22 nos muestra el rodillo tensor externo.
Figura 22 Correa con rodillo tensor externo
Transmisin por correa con rodillo tensor interior:
Es similar al caso anterior, pero el tensor es interior, de manera que al hacer
fuerza sobre la correa, permite su tensado disminuyendo el ngulo de contacto y
alargando la vida til de la correa (Ver figura 23).
-
29
Figura 23 Correa con rodillo tensor interno
2.7.3 Poleas
La colocacin de la correa de manera correcta en el canal o ranura de la polea
influye considerablemente en el rendimiento de la transmisin y en la vida til
de la correa.
Para conseguir una buena colocacin de la correa en la ranura de las poleas es
condicin imprescindible un perfecto alineamiento entre poleas. Para ello es
necesario que los ejes del motor sean paralelos y que la correa trabaje
perpendicularmente a dichos ejes.
Es sntoma de que existe un mal alineamiento entre poleas cuando uno de los
flancos de la correa est ms desgastado que el otro, o que un lado del canal
aparece ms pulido que el otro. Un ruido constante de la transmisin o un
calentamiento excesivo de los rodamientos son tambin sntomas de un mal
alineamiento entra poleas.
Por otro lado, como ya se ha indicado, la correa en "V" trabaja por rozamiento
entre los flancos laterales de la correa y las paredes del canal de la polea. Es
por ello es muy importante que los flancos de la polea se presenten
perfectamente lisos y limpios. La presencia de suciedad o de partculas de
polvo en la polea es muy perjudicial al convertirse en abrasivos que terminan
desgastando a la superficie de la correa.
Figura 24 Colocacin de la correa en el canal de la polea
-
30
La posicin correcta de la correa ser aquella en la que su base mayor quede por
encima de la polea como podemos observar en la figura 24, lo cual va a asegurar
un contacto continuo entre la ranura y los flancos de la correa. En ningn caso la
correa debe tocar el fondo del canal de la polea, dado que de producirse, la correa
empezara a patinar, y esto provocara su desgaste inmediato.
2.7.3.1 Ajuste de la distancia entre poleas
Toda transmisin por correas flexibles debe ofrecer la posibilidad de ajustar la
distancia entre centros de poleas, es decir, de poder variar la distancia que
separa los ejes de giro de las distintas poleas que permita realizar las
siguientes operaciones:
hacer posible el montaje inicial de la correa sin forzarla
una vez montada, poder realizar la operacin de tensado inicial
durante la vida til de la correa, para poder compensar el asentamiento
de la correa o su alargamiento que se produce por el uso.
2.7.3.2 Operacin de tensado
La operacin de tensado de las correas, necesaria y previa a la puesta en
servicio de la transmisin, se llevar a cabo una vez asegurada la correcta
alineacin entre poleas.
En primer lugar, una vez montada la correa, se le da a sta un pequeo tense
por el lado de la transmisin. El ramal tenso de una correa es aquel que se
dirige hacia la polea motriz. Una vez dada esta pequea tensin se le dara
varias vueltas manualmente a la transmisin para asegurarse una mejor
colocacin de la correa en el canal.
Posteriormente se debe ajustar los centros de las poleas hasta aumentar algo
ms la tensin de la correa, conectando posteriormente el motor de
-
31
accionamiento durante varias vueltas con el fin de permitir a las correas
asentarse correctamente en las ranuras de las poleas.
S para de nuevo el motor, y a continuacin se ajusta la distancia entre centros
hasta alcanzar la tensin correcta.
2.7.4 Relacin de transmisin
La relacin de transmisin se calcula de acuerdo a la siguiente expresin:
=
=
Donde,
es la relacin de transmisin;
son las revoluciones por minuto (rpm) de la polea menor;
son las revoluciones por minuto (rpm) de la polea mayor;
es el dimetro de la polea mayor;
es el dimetro de la polea menor.
2.7.4.1 Dimetros de poleas
Generalmente se parte del conocimiento del dimetro de alguna de las poleas,
de la mayor o de la menor.
As, si se parte del dimetro de la polea menor (), el dimetro de la otra polea,
la mayor (), se obtendra a partir de la relacin de transmisin ().
=
Si por el contrario, se conoce el dimetro de la polea mayor (D), el de la menor
(d) se calcula de igual manera:
= /
-
32
2.7.4.2 Distancia entre ejes
La distancia entre ejes (E) de las poleas suele estar establecida en la
transmisin que debe calcularse. No obstante, puede que en algunos casos
este dato no est decidido, quedando a mejor criterio calcular esta distancia.
De acuerdo a la experiencia de las empresas fabricantes, y con el objetivo de
optimizar el rendimiento de la transmisin, la distancia entre ejes de poleas (E)
mnima se puede obtener a partir de las siguientes expresiones:
Si la relacin de transmisin R est comprendida entre 1 y 3:
( + 1)
2+
Si 3: Para este caso bastara que se cumpliese que
Siendo:
, la distancia entre ejes de poleas;
, la relacin de transmisin;
, el dimetro de la polea menor;
, el dimetro de la polea mayor.
2.7.4.3 Arco de contacto
La polea determinante en el diseo y en la duracin de la vida til de la correa
ser la de menor dimetro. Por ello, es necesario conocer el ngulo de contacto
sobre esta polea.
La determinacin del ngulo de contacto () de la correa sobre la polea menor
se realiza aplicando la siguiente expresin:
-
33
= 180 57 ( )/
Donde,
es el ngulo de contacto sobre la polea menor, en grados
es la distancia entre ejes de poleas;
es el dimetro de la polea menor;
es el dimetro de la polea mayor.
Al igual que en el caso anterior, el diseo ptimo de la correa se ha realizado para
un ngulo de contacto sobre la polea de 180. Como en general el ngulo de
contacto sobre la polea menor ser inferior a 180, la prestacin de la correa no
ser la ptima, y por tanto habr que afectarla por un coeficiente corrector del arco
de contacto (FcA), Para obtener estos factores de correccin se consulta el
catalogo del fabricante o tablas de diseo.
-
34
CAPITULO III CLCULOS
-
35
SECCION 1: TRANSMISION DE MOVIMIENTO DESDE LA TOMA DE FUERZA DEL TRACTOR HACIA EL CABEZAL DE LA TRILLADORA.
3.1 Transmisin por eje cardan
Figura 25 Transmisin de movimiento hacia el cabezal de corte
3.1.1 Estudio de transmisin a diferentes posiciones angulares. Suponiendo que trabajemos dentro de los limites, desde 35 hasta cero grados y
devuelta a 35 a 540 RPM que es la velocidad estndar de trabajo de la mayora
de los tractores, procederemos a realizar la simulacin de transmisin de
velocidad angular.
Una proyeccin de vistas frontal, superior y lateral izquierda del eje cardan es
mostrada en la figura 26.
Se pueden apreciar que en total son siete piezas importantes, cuatro flechas y tres
crucetas, las cuales componen la transmisin de junta universal o eje cardan.
-
36
Figura 26 Vistas frontal, superior y lateral izquierda del eje cardan
En la Figura 27 se muestran la entrada y la salida de movimiento en el
eslabonamiento mecnico que componen a la flecha cardan. Como ya se indic,
se tienen 540 revoluciones por minuto en la conexin a la toma de fuerza del
tractor, las cuales varan en proporcin al cambio de ngulo de trabajo en el
denominado punto de inflexin mostrado en la misma figura.
Figura 27 Entrada y la salida de movimiento del eje cardan
Comenzaremos por estudiar la variacin en la transmisin cuando el ngulo de
alineacin entre las flechas 3 y 4 es de 0 (ver figura 28).
-
37
Figura 28 Angulo de alineacin de las flechas a =0
La ecuacin que describe la variacin de transmisin en una junta universal est
definida como:
=
=
Donde i es la relacin de transmisin, y son las velocidades angulares a la
entrada y a la salida de la junta universal, es el ngulo descrito entre ambos ejes
conductor y conducido y el ngulo de rotacin del eje 1.
Figura 29 Representacin de Junta cardan doble con ngulos (Alonso, 2011)
-
38
3.1.2 Estudio de transmisin a diferentes valores de alineacin angular . A continuacin se muestra la ubicacin de la toma de fuerza as como la direccin
de rotacin representada por la flecha roja (Figura 30), para el anlisis de
transmisin de velocidad angular en la flecha cardan tomando la salida con
respecto a la entrada expresada en / obtenidos con Solidworks Motion.
Figura 30 Flecha cardan y ubicacin de la toma de fuerza
En la Figura 30 se muestra la ubicacin del motor rotacional a 540 rpm sobre la
flecha 1 (figura 28).
La figura 31 en sus tres vistas nos muestra a la flecha 1 como entrada y a la flecha
4 como salida para el estudio de transmisin de velocidad angular as como sus
proyecciones superiores (a, b) y lateral (c).
(a)
(b)
(c) Figura 31 Flecha cardan para estudio de transmisin de velocidad
El resultado de las simulaciones de movimiento en la transmisin mecnica
arrojado por SolidWorks Motion muestra que no existen variaciones de transmisin
provocadas por las tres uniones de junta universal a lo largo del eje (ver figura 32).
-
39
Figura 32 Grafica Velocidad angular con respecto al tiempo
La grafica muestra una velocidad angular de 3240 grados por segundo lo cual,
transformado a rpm resulta en:
3240
(
1
360 ) (
60
1 ) = 540
La comprobacin de los resultados anteriores modelando la ecuacin de relacin
de transmisin descrita anteriormente como =2
1=
cos
1212 usando el
software Wolfram Mathematica 10 tienen los siguientes resultados (Ver figura 33).
Figura 33 Grafica relacin de transmisin
Se observa que la relacin de transmisin = 1 se conserva constante a lo largo
del tiempo. Haciendo la sustitucin de 1 = 540 tenemos:
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00
Tiempo (sec)
3240
3240
Velo
cid
ad a
ngula
r4 (
deg
/sec)
-
40
2 = 1 = (1)(540 ) = 540
Por tanto, se concluye que, a un ngulo de alineacin de 0 entre el eje central
de la maquina (tomado como el eje formado por la flecha 4, ver figura 28, que es
fija con respecto a la maquina) y el eje de la cardan (tomado como el eje 3,
tambin de la figura 28), la transmisin de revoluciones por minuto es la misma
tanto a la entrada como a la salida.
La siguiente es una simulacin en SolidWorks Motion a diferentes valores del
ngulo de alineacin beta (en adelante se le nombrar de esta manera) dentro del
intervalo 0 35.
Figura 34 Diferentes valores del ngulo de alineacin (posicin 1: = 35, posicin 2: =0, posicin
3: =35).
-
41
Las grficas de las figuras 35 y 36 muestran las variaciones de velocidad angular y
aceleracin del eje desde la posicin 1 hasta la posicin 3 en un tiempo de 10
segundos y a una velocidad de entrada uniforme de 540 rpm.
Figura 35 Grafica sobre Velocidad Angular del eje
Figura 36 Aceleracin angular del eje
A 35 (cuando = 0 y = 10 segundos) las ondas mostradas en ambos grficos
provocadas por la aceleracin en el impulso y su consecuente desaceleracin a
una razn de 540
(
1
60 ) = 9
= 9 pueden llegar a provocar fuertes
vibraciones, bastante dainas para los mecanismos.
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00
Tiempo (sec)
2655
2977
3300
3622
3944
Velo
cid
ad a
ngula
r6 (
deg
/sec)
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00
Tiempo (sec)
1.7
19138.2
38274.7
57411.2
76547.7
Acele
raci
n a
ngu
lar1
(deg
/sec**
2)
-
42
La siguiente es una lista de los valores que adquiere 2 en distintas fases de la
rotacin del eje cardan en la misma posicin 1 ( = 35).
Las razones por las cuales se establece un intervalo para el ngulo desde 0
hasta 35 como lmite seguro de funcionamiento es debido a las condiciones
cinemticas y los materiales de fabricacin de la junta cardan, por las cuales el
ngulo deber estar limitado en relacin a la velocidad.
Clculos y observaciones de muchas aplicaciones en la industria han demostrado
que ciertos torques de aceleracin en la parte media del eje no deben excederse,
esto para poder garantizar un funcionamiento suave de los sistemas de
transmisin (Dana Holding Corporation, 2010).
Este torque de aceleracin depende del producto de la velocidad y en ngulo de
deflexin
= ,
Y el momento de inercia de la parte media del eje. El ngulo de deflexin mximo
permisible a una velocidad dada puede ser determinada del siguiente diagrama
(Figura 37).
-
43
Figura 37 Diagrama ngulo de deflexin mximo permisible (Dana Holding Corporation, 2010)
-
44
La siguiente grafica muestra con ms detalle el comportamiento del eje a distintos
valores de (Figura 38).
Figura 38 Grafica del comportamiento de la velocidad angular del eje cardan a distintos valores de (Wolfram Research, Inc, 2008).
-
45
3.1.3 Conclusiones de los clculos del eje cardan.
Para concluir, la transmisin a un ngulo de deflexin mximo de trabajo ( =
35), se transmite de forma irregular, fluctuando su velocidad de transmisin
angular (2) entre un mximo de:
Y con una amplitud de variabilidad mxima de:
-
46
3.2 Transmisin de cadena primera seccin.
Figura 39 Primera seccin de transmisin por cadena
La seccin que se muestra en la figura 40 se compone de un par de coronas y una
cadena transmisora.
Figura 40 Elementos de la primera seccin de transmisin por cadena
-
47
3.2.1 Relacin de transmisin
La relacin de transmisin en el caso de transmisin por cadena, es el cociente
entre el nmero de diente de la rueda conducida (rueda arrastrada) y el nmero de
dientes de la rueda conductora (rueda motriz). La relacin de transmisin tambin
se puede expresar en trminos de la velocidad de rotacin de las ruedas.
=21
=12
Donde i es la relacin de transmisin, 1y 2 son los nmeros de dientes de la
sprocket menor y mayor (respectivamente) y 1 y 2 las velocidades de las
mismas.
La relacin de transmisin i = 1.6, por lo tanto
-
48
La velocidad de rotacin en la corona conducida es de 337.5 rpm.
3.3 Transmisin perpendicular por engranes cnicos.
Figura 41 Transmisin de engranes
Esta seccin est compuesta por un par de engranes cnicos rectos que
transmiten a 90 y tienen una relacin de 1 a 1. Su relacin de transmisin
tambin est dada por:
-
49
Figura 42 Relacin de transmisin
Por lo tanto
= =
Por lo tanto
= =
Y por consiguiente
= = .
3.4 Transmisin de poleas.
Figura 43 Transmisin de poleas
-
50
Esta seccin se compone de tres poleas, una conductora, una tensora y una
conducida.
Figura 44 Elementos de la transmisin de poleas
En las transmisiones por correa la relacin de transmisin est dada por:
=21
=12
Figura 45 Relacin de transmisin por correa
-
51
La relacin de transmisin i es igual a 1.34694 y la velocidad de rotacin en la
polea conducida es igual a 250.568 RPM.
-
52
3.5 Transmisin de cadena segunda seccin.
Figura 46 Segunda seccin transmisin por cadena
Esta, como se puede notar a simple vista, tambin es una seccin reductora de
velocidad. Consiste solo de dos coronas.
Figura 47 Elementos segunda seccin de trasmisin por cadena
-
53
Por lo tanto, la salida de velocidad en la corona conducida es equivalente a
187.926 RPM.
-
54
3.6 Transmisin de cadena tercera seccin.
Figura 48 Tercera seccin de transmisin por cadena
Esta ltima seccin del sistema de transmisin antes de llegar al cabezal de corte
se distingue de las otras en cuanto a su relacin de transmisin, la cual a simple
vista se puede deducir que < 1.
Figura 49 Elementos de la tercera seccin de trasmisin por cadena
-
55
Por lo tanto, la velocidad de rotacin a la salida de la corona conducida es igual a
528.542 RPM.
-
56
3.7 Conclusiones. En conclusin, podemos apreciar que en conjunto toda la transmisin mecnica
tratada en secciones se puede considerar de forma general como un solo
conjunto.
Figura 50 Transmisin mecnica
La transmisin total del conjunto comprendido entre el eje cardan y la ltima
sprocket del mecanismo de cadena tiene una relacin de transmisin total de:
= 1.02168
Y velocidad angular total de transmisin de:
= 2 = 1.02168 540 = 528.542
Con una variabilidad mxima debida al ngulo de deflexin de:
= (
2) = (
659.218 442.342
2) = 108.438
-
57
Lo que representa un porcentaje de variacin mximo de:
528.542
1=
108.438
= 0.2051
Por lo que la salida final se expresa como = 528.542 con una variacin de
0% cuando = 0 hasta un 20.51% cuando = 35
SECCION 2: TRANSMISION DE MOVIMIENTO EN EL CABEZAL DE LA TRILLADORA. Ahora, concluido lo anterior, se proceder a dar lugar al estudio de transmisin mecnica del siguiente conjunto de la mquina, el cual se conocer de ahora en adelante como cabezal de corte.
Figura 51 Detalle del cabezal y sistema de transmisin
Esta seccin de la maquina se encarga de separar los tallos de cereal del suelo y llevarlos hasta el eje de acarreo. Los subconjuntos que lo componen se separaran en:
Transmisin,
Sistema de acarreo y
Sistema de corte
-
58
(a)
(b)
(c)
Figura 52 Vista de los detalles internos del cabezal. (a) Vista superior, (b) vista frontal, (c) vista inferior.
Detalle de los sistemas de transmision por cadena internas del cabezal de corte.
-
59
3.8 Transmisin. Esta seccin de mecanismos, la cual se encarga de repartir el impulso a los
sistemas de corte y de acarreo se compone a su vez de dos secciones
importantes, por lo que, para lograr una comprensin ms profundizada del
sistema de transmisin se dividir su estudio en dos partes:
Transmisin perpendicular de engranes cnicos y
Transmisin de cadena
3.8.1 Transmisin perpendicular de engranes cnicos.
Figura 53 Vista en detalle del acoplamiento entre el sistema de transmisin del tractor y el cabezal de
corte
-
60
El detalle A de la figura 53 muestra la disposicin de la unin entre la sprocket que
transmite el movimiento de salida de la transmisin analizada en apartado anterior,
y la entrada de movimiento al cabezal por medio de la transmisin de engranes
cnicos.
La figura 54 muestra en detalle la estructura interna de la transmisin de engranes
cnicos y la transmisin de cadena hacia el sistema de corte.
Figura 54 Mecanismo de distribucin de movimiento y potencia al cabezal
Este mecanismo tiene una relacin de transmisin de 1 ya que ambos engranes
tienen el mismo nmero de dientes, por tanto el eje transmite las mismas 528.5
revoluciones por minuto en ejes.
-
61
3.8.2 Transmisin de cadena. Este sistema consta de 6 coronas o sprockets de 36 dientes, 4 tensores, adems
de la sprocket de 10 dientes que le transmite el impulso.
En este caso en particular no se puede recurrir a la formula anterior para calcular
la relacin transmisin.
Para este caso se debe calcular primero la velocidad lineal de la cadena, ya que
en funcin de esta estar la velocidad angular de cualquier sprocket conectada a
ella.
Figura 55 Sistema de transmisin de cadena
-
62
3.8.1.1 Calculo de la velocidad lineal de la cadena.
Figura 56 Vista inferior del sistema de distribucin
El primer paso es calcular la velocidad tangencial en la sprocket transmisora si
sta rota a 528.542 si radio es de 1.011 .
Para calcular la velocidad tangencial se procede como sigue:
Donde es el nmero de revoluciones por minuto, la velocidad angular en
radianes por segundo, t la velocidad tangencial de la sprocket y l la velocidad
lineal en la cadena.
-
63
3.8.1.2 Calculo de la velocidad angular en las sprockets del sistema de acarreo.
Figura 57 Corona o sprocket del sistema de transmisin de cadena
Para calcular la velocidad angular de la sprocket de 36 dientes, teniendo que su
velocidad tangencial es de 55.9576 / y su radio es de 3.442 .
-
64
3.9 Sistema de acarreo.
Calculo de la velocidad lineal de la cadena del sistema de acarreo
Figura 58 Vista en interna del accionamiento de sistema de acarreo
Calcular la velocidad lineal de la cadena del sistema de acarreo teniendo que uno
de los ejes rota a 155.246 y ambas coronas tienen 16 dientes cada una, con
un paso de 75 (su radio es de 1.922 ).
Figura 59 Detalle del sistema de acarreo
-
65
Por lo tanto tenemos que la velocidad de avance a la cual las cadenas de acarreo
arrastran el cereal es de aproximadamente 31.25 pulgadas por segundo, o cerca
de 2.6 pies por segundo.
-
66
3.10 Sistema de corte
Calcular la frecuencia a la cual se desplaza la barra de cuchillas accionada por el
mecanismo de manivela-biela-corredera.
Figura 60 Detalle del accionamiento del sistema de corte.
El pin del de la transmisin de fuerza de engranes cnicos transmite una
velocidad de rotacin de 528.542 (ver Figura 60). ste pin y el pin de la
manivela tienen 10 dientes, por lo que su relacin de transmisin es 1:1.
-
67
Figura 61 Relacin de transmisin de la transmisin de fuerza al sistema de corte del cabezal.
La relacin de transmisin es 1:1, por lo tanto, se transmiten las 528.542 a la
manivela, por lo tanto, la frecuencia de rotacin f de la manivela es equivalente a
= (528.542
) (
60
1 ) = 8.8
La simulacin de la dinmica del mecanismo en SolidWorks Motion se realiz
estableciendo una velocidad de 10 para apreciar mejor el comportamiento
dinmico de las cuchillas.
-
68
Figura 62 Disposicin del mecanismo de manivela-biela-corredera para la simulacin dinmica.
Los resultados arrojados describen las curvas del desplazamiento lineal, la
velocidad lineal y la componente trasnacional de la aceleracin lineal de a barra de
cuchillas (figuras 63, 64 y 65, respectivamente).
Figura 63 Curva del desplazamiento lineal de la barra de cuchillas.
0.00 1.80 3.60 5.40 7.20 9.00 10.80 12.60 14.40 16.20 18.00
Tiempo (sec)
1641
1667
1692
1718
1743
Despla
zam
iento
lin
ea
l1 (
inch)
-
69
Figura 64 Curva de la velocidad lineal de la barra de cuchillas.
Figura 65 Curva de la aceleracin lineal en la barra de cuchillas.
La figura 63 muestra un movimiento de corte regular, con periodos de reposo en
las crestas y golpeteos en los valles de la curva. En tanto las figuras 64 y 65
describen una variacin de velocidad y aceleracin bastante irregular que pueden
predecir futuras fatigas mecnicas.
0.00 1.80 3.60 5.40 7.20 9.00 10.80 12.60 14.40 16.20 18.00
Tiempo (sec)
1
19
38
56
75
Velo
cid
ad1
(in
ch/s
ec)
0.00 1.80 3.60 5.40 7.20 9.00 10.80 12.60 14.40 16.20 18.00
Tiempo (sec)
-474
281
1036
1791
2546
Acele
raci
n lin
ea
l1 (
inch/s
ec**
2)
-
70
Conclusiones
Se dise un cabezal que corta y traslada el material de trabajo (granos finos)
para acoplarlo a la maquina Master Export Multipla para las tareas de trilla
adaptando una tira de navajas con sus guas (peines) como sistema de corte y se
dise un sistema de cadenas como mecanismo de traslado de material,
cumpliendo con las limitantes de dimensiones.
Figura 66 Cabezal acoplado a la mquina. Vista frontal.
-
71
Figura 67 Cabezal acoplado a la mquina. Vista lateral.
Basndose a las limitantes de dimensin y espacio disponible de trabajo, la
decisin de usar un sistema de corte por navajas, en contraposicin a los tabores
rotatorios fue ms acertada debido al poco espacio que ocupa as como la
facilidad para acoplarlo mecnicamente al sistema de accionamiento.
El sistema de traslado de material se dise por entero debido a la imposibilidad
de acoplamiento de otros mecanismos comerciales, ya que no se encontr una
alternativa que estuviera dentro de las limitantes de espacio. El diseo final
consisti en tres pares de cadenas de acarreo el cual logro un abastecimiento de
material aceptable al sistema de pretrilla.
Con respecto al diseo del sistema de accionamiento del cabezal, la eleccin de
los sistemas de corte y traslado tratados anteriormente, permiti el uso de un
mecanismo guiado por una sola cadena, reduciendo el nmero de elementos a los
componentes esenciales, permitiendo as que se aplique un mnimo de esfuerzo
en su accionamiento.
-
72
Bibliografa
Alonso, H. R. (2011). Juntas Universales. Obtenido de http://ocw.uc3m.es/ingenieria-mecanica/diseno-mecanico-1/material_clase/ocw_juntas
BEER, F. P., JR., E. R., & CORNWELL, P. J. (2010). MECNICA VECTORIAL PARA INGENIEROS DINAMICA. Mxico: McGRAW-HILL/INTERAMERICANA EDITORES, S.A. DE C.V.
Carlo Brutti, E. P. (1999). Dynamics of the transmission with a double cardan joint. Tenth World Congress on the Theory of Machine and Mechanisms, (pg. 6). Oulu, Finland.
Dana Holding Corporation. (2010). Cardan Shafts for Industrial Applications. Obtenido de http://www.dana.com.br/arquivos/fora-de-estrada/dext-ik_150610.pdf
HIBBELER, R. (2010). MECANICA VECTORIAL PARA INGENIEROS.DINAMICA. Mxico: PEARSON EDUCACIN.
iwis. (2006). Chain engineering, design and construccion, examples of calculation . Mnchen, Germany: iwis.
Lombard, M. (2010). SolidWorks 2010 Bible. Indianapolis, IN: Wiley Publishing, Inc.
Lombard, M. (2011). SolidWorks 2011 Parts Bible. Indianapolis, IN: Wiley Publishing, Inc.
Norton, R. L. (2009). DISEO DE MAQUINARIA Sntesis y anlisis de mquinas y mecanismos. Mxico: McGRAW-HILL/INTERAMERICANA EDITORES, S.A. DE C.V.
Richard G. Budynas, J. K. (Octava edicin). DISEO EN INGENIERA MECNICA DE SHIGLEY. Mxico: McGRAW-HILL/INTERAMERICANA EDITORES, S.A. DE C.V.
Shimura, S. (1997). The Complete Guide to Chain. Wheeling, IL: U. S. Tsubaki, Inc.
Wolfram Research, Inc. (2008). Graph Drawing. Obtenido de http://www.wolfram.com/learningcenter/tutorialcollection/
Wolfram Research, Inc. (2008). Mathematics and Algorithms. Obtenido de http://www.wolfram.com/learningcenter/tutorialcollection/
-
73
GLOSARIO
Embrague: l embrague es un sistema que permite tanto transmitir como
interrumpir la transmisin de una energa mecnica a su accin final de manera
voluntaria.
Motor: Un motor es la parte sistemtica de una mquina capaz de hacer funcionar
el sistema, transformando algn tipo de energa (elctrica, de combustibles fsiles,
etc.), en energa mecnica capaz de realizar un trabajo.
Trilla: Se denomina trilla a la operacin que se hace con los cereales, tras la siega
o cosecha, para separar el grano de la paja.
Potencia: es la cantidad de trabajo efectuado por unidad de tiempo.
Velocidad: Es una magnitud fsica de carcter vectorial que expresa el
desplazamiento de un objeto por unidad de tiempo.
Velocidad angular: Se define como el ngulo girado por una unidad de tiempo y
se designa mediante la letra griega .
Fuerza: Es una magnitud vectorial que mide la Intensidad del intercambio
de momento lineal entre dos partculas.
Trabajo: El trabajo realizado por una fuerza es el producto entre la fuerza y el
desplazamiento realizado en la direccin de sta.
Rapidez: Es la relacin entre la distancia recorrida y el tiempo empleado en
completarla.
-
74
Radio: Es cualquier segmento que une el centro a cualquier punto de dicha
circunferencia.
Tiempo: es una magnitud fsica con la que medimos la duracin o separacin de
acontecimientos.
ngulo: Es la amplitud entre dos lneas de cualquier tipo que concurren en un
punto comn.
Frecuencia: Es una magnitud que mide el nmero de repeticiones por unidad
de tiempo de cualquier fenmeno o suceso peridico.
Rotacin: Es el movimiento de cambio de orientacin de un cuerpo o un sistema
de referencia de forma que una lnea (llamada eje de rotacin) o un punto
permanece fijo.
Energa: Se define como la capacidad para realizar un trabajo.
Cojinete: En ingeniera es la pieza o conjunto de ellas sobre las que se soporta y
gira el rbol transmisor de momento giratorio de una mquina.
Brida: Es el elemento mecnico que une dos o ms componentes entre s.
Desgaste: Es la prdida de masa de la superficie de un material slido por la
interaccin mecnica con otro cuerpo en contacto.
Engrasador: Es una herramienta que se utiliza para realizar la lubricacin
de piezas donde la grasa debe penetrar.
Fluctuaciones: Son las variaciones en el valor o medida de una cosa.
-
75
Rueda dentada: Es un mecanismo de forma circular que transmite movimiento
mediante los dientes que rodean la rueda en todo su permetro.
Sprockets: El sprocket o catarina es la pieza dnde se acomoda la cadena para
la transmisin de potencia, ste est conectado a un motor el cul lo hace girar
transmitiendo el movimiento a la cadena.
Tensin: La magnitud fsica que representa la fuerza por unidad de rea en el
entorno de un punto material sobre una superficie.
Buje: Un buje es el elemento de una mquina donde se apoya y gira un eje.
Pines: se refiere a pin palabra en ingls para Perno.
Perno: Es una pieza metlica larga de seccin constante cilndrica, normalmente
hecha de acero o hierro. Est relacionada con el tornillo pero tiene un extremo de
cabeza redonda.
Casquillo: Se le denomina casquillo a una pieza generalmente de acero, bronce o
plstico, con una forma tubular, que esta mecanizada en su interior y exterior,
tiene una tolerancia ajustada para insertar en el otra pieza con diferentes
aplicaciones.
-
76
ANEXOS
-
77
Anexo A: Imgenes del cabezal terminado
-
78
Comparacin entre diseo y resultado final.
-
79
-
80
-
81
-
82
-
83
-
84
-
85
Anexo B: Etapas de diseo y construccin del cabezal para trilladora.
-
15.
00
8.94 9.25
9.50
9.25 10.81
76.00 AA
4.2
5 0
.25
2.50
1.0
0 1
.00
3.0
0
10.56 9.38
9.38
2.00 2.50
1.0
0 0
.75 2.00
SECCIN A-AESCALA 1 : 14
Vista superior
Vista frontal
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 08/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:14 HOJA 1 DE 6
A4Etapa de armado #1
Caja de mecanismos
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
-
15.
00
76.00
9.375 9.375 9.375 9.375
5.00 4.00 6.5625
5.5
5 4
.30
9.375
1.7
5
2.50
1.00
0.7
5
1.25
1.8
75
5.3
75
1.2
5 6
.25
2.25 6.625
1.00 Vista frontal (Seccion parcial)
Vista superior (Seccion parcial)
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 08/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:14 HOJA 2 DE 6
A4Etapa de armado #2
Catarinas y cadena de transmision
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
-
85.50
9.3
3 3
.17
4.00
4.00 14.00 14.00 14.00 14.00 85.83
3.00
Vista frontal
Vista superior
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 08/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:14 HOJA 3 DE 6
A4Etapa de armado #3
Mecanismo de biela-manivela-corredera y barra
de cuchillas
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
-
1.4
2
0.8
6
16.23 9.38 9.38 9.38 9.38 9.38 14.93 9
.50
4.
22
1.25 1.00
7.7
5
11.
63
Vista frontal
Vista superior
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 08/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:14 HOJA 4 DE 6
A4Etapa de armado #4
Flechas y catarinas del sistema de acarreo
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
-
5.7
4
26.25 77.00
30.00
6.5
0
9.50
4.0
0
24.75
Vista frontal
Vista superior
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 08/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:14 HOJA 5 DE 6
A4Etapa de armado #5
Transmision de engranes, cadenas de acarreo y
cubiertas de proteccion
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
-
29.
11
89.50
88.00
74.50
4.0
0 2
2.37
2
4.25
1.50
1.00 17.75 17.75 17.75 Vista frontal
Vista superior
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 08/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:14 HOJA 6 DE 6
A4Etapa de armado #6
Proteccion tubular y costillas de retencion de
pastura
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
-
6 5 234 1
A
B
C
D
6 5 2 134
D
B
A
C
ELABORO: AARON ARREDONDO SANCHEZLUGAR: TESJIFECHA: 8/DIC/2014
TTULO:
N. DE DIBUJO
ESCALA:1:4 HOJA 1 DE 1
A4Transmision de fuerza en el cabezal de corte
Transmision de fuerza perpendicular por engranes conicos
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN PULGADAS
Hoja1Vista de dibujo1Vista de dibujo3Vista de seccin A-A
Hoja1Vista de dibujo1Vista de dibujo3
Hoja1Vista de dibujo1Vista de dibujo3
Hoja1Vista de dibujo1Vista de dibujo3
Hoja1Vista de dibujo1Vista de dibujo3
Hoja1Vista de dibujo1Vista de dibujo3
Hoja1Vista de dibujo2Vista de dibujo3Vista de dibujo4Vista de dibujo5