Desarrollo de una herramienta para estudiar Fuzzy...
71
Desarrollo de una herramienta para estudiar Fuzzy Logic Tipo-2 Edier Gustavo Linares Zarate John Jairo Rojas Coronado Universidad Distrital Francisco Jose de Caldas Facultad tecnológica Ingeniería en control electrónico Bogotá 2015
-
Upload
duonghuong -
Category
Documents
-
view
212 -
download
0
Transcript of Desarrollo de una herramienta para estudiar Fuzzy...

Desarrollo de una herramienta para estudiar Fuzzy Logic Tipo-2
Edier Gustavo Linares Zarate
John Jairo Rojas Coronado
Universidad Distrital Francisco Jose de Caldas
Facultad tecnológica
Ingeniería en control electrónico
Bogotá
2015

Desarrollo de una herramienta para estudiar Fuzzy Logic Tipo-2
Edier Gustavo Linares Zarate
John Jairo Rojas Coronado
Monografía para optar el título de
Ingeniero en control electrónico
Director
Ing. M. Sc. MBA
Andrés Escobar Díaz
Universidad Distrital Francisco José de Caldas
Facultad tecnológica
Ingeniería en control electrónico
Bogotá
2015

Nota de aceptación
_____________________________
_____________________________
_____________________________
_____________________________
Presidente del jurado
_____________________________
Jurado
_____________________________
Jurado
Fecha de Presentación: 2 de Octubre de 2015

A mis padres y familia por el apoyo prestado, a
los docentes de la universidad Distrital, a mis
compañeros de estudio.

Agradecimientos
Los autores expresan sus agradecimientos a:
A todas las personas que con su apoyo y colaboración hicieron posible la culminación
exitosa de este proyecto de grado para obtener el título de ingeniero en control electrónico.
Al Ingeniero Andrés Escobar (Director) quien con su conocimiento, apoyo y colaboración
formo parte fundamental en la definición y elaboración de este trabajo.
A todos los compañeros ingenieros de la universidad Distrital que aportaron con sus sugerencias y opiniones sobre el trabajo desarrollado.

TABLA DE CONTENIDO
1 INTRODUCCIÓN 9
2 ESTADO DEL ARTE 11
3 INCERTIDUMBRE EN UN FLS 12
4 CONJUNTOS FUZZY TIPO-2 16
4.1 CONCEPTO DE UN CONJUNTO FUZZY TIPO-2 17
4.2 FUNCIONES DE PERTENENCIA 19
4.3 CONCEPTOS ASOCIADOS A CONJUNTOS FUZZY TIPO-2 19
4.4 CONJUNTOS FUZZY LOGIC DE INTERVALO TIPO-2 (IT2FS-INTERVAL TYPE-2 FUZZY SET) 23
4.5 TEOREMA DE LA REPRESENTACIÓN 26
5 OPERACIONES ENTRE CONJUNTOS FUZZY TIPO-2 27
5.1 JOIN Y MEET BAJO LA T-NORMA MÍNIMO 28
5.2 UNIÓN 28
5.3 INTERSECCIÓN 30
5.4 COMPLEMENTO 31
6 SISTEMAS FUZZY LOGIC TIPO-2 32
6.1 INFERENCIA EN CONJUNTOS FUZZY TIPO-2 34
6.2 REDUCCIÓN DE TIPO 36
6.3 DEFUZZIFICADOR 42
7 GUI EN MATLAB PARA SISTEMAS DE INTERVALO FUZZY TIPO-2 43
7.1 FUNCIONES DE PERTENENCIA UTILIZADAS 44
7.2 MODULO CONCEPTOS BÁSICOS EN CONJUNTOS FUZZY TIPO-2 46
7.3 INTERFAZ GRÁFICA PROPUESTA PARA SISTEMAS FUZZY DE INTERVALO TIPO-2 47
8 APLICACIONES Y EJERCICIOS PROPUESTOS DE ESTUDIO 50

8.1 APLICACIÓN DE CONTROLADORES FUZZY LOGIC TIPO-2 50
8.2 EJEMPLO CONTROLADORES DE INTERVALO TIPO-2 “CONTROL DE VELOCIDAD PARA MOTORES
MARINOS” 50
9 RESULTADOS 55
10 CONCLUSIONES 56
11 ANEXO 1 57
12 BIBLIOGRAFÍA 67

Tabla de Figuras
Tabla 3-1: Ocurrencia, causas y naturaleza de la incertidumbre según Klir [23]............................................. 13
Figura 3-1: Sistemas Fuzzy Logic ...................................................................................................................... 14
Figura 4-1: Conjunto fuzzy tipo-2 ..................................................................................................................... 16
Figura 4-2: Función de pertenencia triangular para conjuntos fuzzy tipo-2 ..................................................... 18
Figura 4-3: Conceptos nuevos en Sistemas fuzzy tipo-2 [2] .............................................................................. 22
Figura 4-4: Conceptos para conjuntos fuzzy de intervalo tipo-2 ...................................................................... 26
Figura 5-1: Sistema fuzzy logic general ............................................................................................................ 32
Figura 5-2: Sistema fuzzy logic tipo-2 ............................................................................................................... 33
Figura 5-3: Grafica de la inferencia Tipo-2 para producto y mínimo [15] ....................................................... 35
Figura 6-1: Grafica para una función gaussiana .............................................................................................. 44
Figura 6-2: Grafica para la función trapezoidal ................................................................................................ 45
Figura 6-3: Grafica para la función triangular .................................................................................................. 45
Figura 6-4: Interfaz inicial modulo conceptos fuzzy tipo-2 ............................................................................... 46
Figura 6-5: Ejemplo conjunto fuzzy de intervalo tipo-2 con forma Gaussina ................................................... 47
Figura 6-6: Unión de intervalo tipo-2 para los conjuntos A y B en el módulo Conceptos Fuzzy Tipo-2 ............ 47
Figura 6-7: Interfaz gráfica principal para definir entradas y salidas en un sistema fuzzy de intervalo tipo-2 48
Figura 6-8: Interfaz gráfica para definir y editar las reglas del sistema ........................................................... 48
Figura 6-9: Analizador de reglas ....................................................................................................................... 49
Figura 6-10: Analizador de superficie ............................................................................................................... 49
Figura 7-1: Tabla resumen ejemplo de control para motores diésel marinos .................................................. 53
Figura 7-2: Superficie de control para controlador de motores marinos mostrado en [40] ............................. 54
Figura 7-3: Superficie de control para el controlador tipo-1 resultante del toolbox fuzzy de Matlab .............. 54
Figura 7-4: Resultados de las pruebas realizadas en [40] ................................................................................ 55
Figura A-1: Grafica para una función de pertenencia gaussiana ..................................................................... 57
Figura A-2: Grafica para un función de pertenencia trapezoidal ..................................................................... 58
Figura A-3: Grafica para una función de pertenencia triangular ..................................................................... 58
Figura A-4: Grafica para una función de pertenencia s-shape ......................................................................... 59
Figura A-5: Grafica para un función de pertenencia z-shape ........................................................................... 59
Figura A-6: Grafica para para un conjunto fuzzy de intervalo tipo-2 con forma gaussian ............................... 60
Figura A-7: Ejecución del IT2FLSGUI en Matlab ................................................................................................ 60
Figura A-8: Selección tipo de fuzzificación ........................................................................................................ 61
Figura A-9: Selección método ........................................................................................................................... 61
Figura A-10: Definición de antecedentes y consecuencias ............................................................................... 62
Figura A-11: Vista general del sistema fuzzy de intervalo tipo-2 ..................................................................... 62
Figura A-12: Parámetros para el método CF Izquierda + CF Derecha .............................................................. 63
Figura A-13: Parámetros para el método CF Principal + FOU ........................................................................... 64
Figura A-14: Parámetros para el método CF Inferior + CF Superior ................................................................. 64
Figura A-15: Editor de Reglas ........................................................................................................................... 65
Figura A-16: Analizador de Reglas .................................................................................................................... 66
Figura A-17: Analizador de Área ....................................................................................................................... 66

1 Introducción
En el mundo real se presentan constantemente retos para la ingeniería que busca de forma
permanente construir y entregar a la sociedad herramientas que ayuden a mejorar el estilo
de vida. Para la ingeniería en control poder construir un equipo que se adapte con facilidad
a los constantes cambios del entorno y al desgaste de dispositivos utilizados en los
diferentes sistemas se convierte en todo un reto, para lo cual ingenieros y científicos
trabajan arduamente y de esta forma poder desarrollar, deducir, construir, o ingeniar
mecanismos que detecten estos cambios y permitan tomar decisiones iguales o mejores a
las que toma un experto cuando estas alteraciones se presentan.
El poder colocar en un dispositivo la posibilidad de tomar decisiones es un tema en el cual
se han realizado bastantes avances, una de las técnicas más utilizadas en los desarrollos
recientes es fuzzy logic, una tecnología de inteligencia computacional que permite a los
dispositivos tomar decisiones de acuerdo a los cambios que ocurran en el entorno del
sistema bajo control. Fuzzy logic es una lógica que va más allá de la lógica tradicional en la
cual solo se tiene un sí o no (pertenece o no pertenece, en términos de conjuntos), fuzzy
logic en su esencia permite tener resultados intermedios para lo cual se definen conjuntos
que abarcan estos estados y así no solo tener blanco y negro, también poder contar con toda
una gama de grises, siendo esto muy útil en el entendimiento y solución de problemas
bastante comunes en el área de la ingeniería.
En la actualidad fuzzy logic tiene dos categorías llamadas fuzzy logic tipo-1 y fuzzy logic
tipo-2, y su diferencia radica en el tipo de conjuntos que es utilizado para definir el sistema.
Los conjuntos fuzzy tipo-1 (CF T1) que han sido utilizados en múltiples aplicaciones desde
1965 cuando Zadeh realizo su introducción en [1], han alcanzado resultados exitosos, sin
embargo estos tienen capacidades limitadas para manejar, modelar y minimizar los efectos
de datos con incertidumbre. El hecho que los CF T1 no puedan hacer esto suena paradójico
ya que la palabra fuzzy por un largo tiempo ha tenido una connotación de incertidumbre
[2].
En los CF T1 la función de pertenencia es un conjunto clásico mientras que los conjuntos
fuzzy tipo-2 tienen una función de pertenencia fuzzy, este conjunto es útil en circunstancias
donde es difícil definir una función de pertenencia exacta.
Cuando se tienen varios conjuntos en los cuales existen diferentes apreciaciones sobre los
extremos que puede tener una misma variable, para llegar a su función de pertenencia
podemos tomar los valores promedio de sus extremos según los diferentes conjuntos de
datos, definir estos como los puntos finales de la función de pertenencia y tomar la mitad

de estos dos puntos como el punto donde está el vértice superior de una función triangular
(se puede construir la función con otras formas) y tendríamos una función de pertenencia
tipo-1 que puede ser representada en dos dimensiones, sin embargo de esta forma se ignora
por completo la incertidumbre asociada a los extremos de la función [3].
Una segunda alternativa para la construcción de la función de pertenencia es usar los
valores promedios de los extremos y su desviación estándar y así establecer un intervalo de
incertidumbre sobre los valores, de esta forma mostrar la dispersión natural de los extremos
según los datos de los diferentes conjuntos tomados, si construimos una función triangular
con esta dispersión se puede tomar como un área formada por N funciones triangulares,
luego cada valor de x pude llegar hasta N funciones de pertenencia teniendo µ1(x),
µ2(x),……, µN(x) y cada función de pertenencia tiene un peso asociado wx1, wx2,….., wxN.
De esta forma para cada x se tiene la función de pertenencia {(µi(x),wxi), i=1,2,…..,N}
llamada función de pertenencia secundaria y como resultado obtenemos una representación
en tres dimensiones [2].
Esta capacidad que tienen los conjuntos fuzzy tipo-2 de trabajar con incertidumbre puede
modelar en cierta medida los ambientes dinámicos en los que opera un sistema en el mundo
real, en este documento se dará una introducción a esta teoría y se hace una compilación de
varios autores e investigadores organizada en 10 capítulos incluyendo esta introducción
como se describen a continuación.
En el capítulo 2, Estado del arte, se realiza una descripción de las fuentes utilizadas para
realizar el presente trabajo referenciando a los principales autores y trabajos relacionados
con temas como conjuntos fuzzy tipo-2 y sistemas de fuzzy logic tipo-2, esto con el fin de
ofrecer al lector fuentes alternas de profundización sobre el tema abordado en este
documento.
En el capítulo 3, Incertidumbre en un SFL, se realiza una descripción básica de
incertidumbre y sus fuentes utilizando autores que has estudiado el tema a profundidad ya
que el manejo de la incertidumbre es una de las principales características de los sistemas
fuzzy logic tipo-2 por la utilización de palabras en la definición de las reglas de estos
sistemas; la interpretación de las palabras por su naturaleza puede ser ambigua.
En el capítulo 4, Conjuntos fuzzy tipo-2, se introducen los conjuntos fuzzy tipo-2 y los
conceptos asociados, esto es fundamental debido al uso de estos en la definición de los
antecedentes y consecuencias, haciendo una conversión del lenguaje natural de las palabras
a una interpretación matemática.
El capítulo 5, Operaciones entre conjuntos fuzzy tipo-2, se explican las operaciones básicas
unión, intersección y complemento en los conjuntos fuzzy tipo-2 y las operaciones join y
meet de las funciones de pertenencia, que son utilizas para realizar las diferentes acciones
de condicionalidad en las reglas, implicación y agregación en los SFL.

El capítulo 6, Sistemas fuzzy logic tipo-2 (SFL T2), describe las diferentes etapas que
caracterizan el sistema como son fuzzificación, inferencia, reducción de tipo y
defuzzificación, este capítulo es muy importante porque realiza la descripción teórica,
profundizando en el motor de inferencia, reducción de tipo donde esta una de las grandes
diferencias con su antecesor sistemas fuzzy Tipo-1.
El capítulo 7, GUI en Matlab para sistemas de intervalo fuzzy tipo-2, describe la
herramienta de software que complementa la teoría recopilada en los capítulos 2 al 5, como
para apoyo para el estudio y análisis de sistemas fuzzy logic tipo-2, para que la practicas
con este software puedan afianzar los conceptos tratados en la teoría.
El capítulo 8, Aplicaciones y ejemplos, se realiza una descripción de las aplicaciones en las
que se ha utilizado sistemas fuzzy logic tipo-2 mostrando los diferentes campos en los que
es beneficioso utilizar esta tecnología y los resultados exitosos que se obtienen, esto con el
fin de mostrar su uso potencial e invitar a los lectores a profundizar y utilizar fuzzy logic
tipo-2 en desarrollos futuros.
En el Capítulo 9 y 10, Resultados y Conclusiones respectivamente, se realiza un resumen
de los resultados obtenidos junto con las conclusiones finales del trabajo presentado, así
como una invitación a utilizar esta tecnología en próximos trabajos de ingeniería en control
como en otras áreas en las que pueda ser funcional.
2 ESTADO DEL ARTE
Para realizar una introducción correcta en los sistemas fuzzy logic tipo-2 es necesario
abordar los temas de forma organizada iniciando por los conceptos de conjuntos fuzzy tipo-
2, luego abordar sus operaciones, pasando a sistemas fuzzy logic tipo-2 y finalizando en las
aplicaciones donde puede utilizarse esta tecnología.
Los conjuntos fuzzy fueron definidos por Zadeh en 1965 [1] y realizo una introducción a
los conjuntos fuzzy tipo-2 en 1975 [4], [5] y [6] si se quiere entender como inicio todo el
concepto relacionado a esta tecnología este sería un bueno comienzo. Aunque el concepto
inicial fue abordado en la década de los 70’s [7] un trabajo más profundo se realizó hasta
los 90’s y posteriormente cuando se realizan investigaciones relacionadas con las
propiedades [8], operaciones [9], centro geométrico [10] para conjuntos fuzzy tipo-2,
también se encuentra autores donde se buscar utilizar nuevos métodos de análisis y
utilización de los conceptos matemáticos y geométricos como en [11], [12] y [13].
Paralelamente con el estudio de los conceptos matemáticos para fuzzy logic tipo-2 se ha
desarrollado avances en sistemas fuzzy logic tipo-2, encontrando a finales de los 90’s
publicaciones como [14] [15] donde se realiza una introducción a estos sistemas, a

principios de siglo por la dificultad matemática y conceptos naturales de los sistemas fuzzy
logic tipo-2 autores como Jerry M. Mendel y Robert I. Bob John publican [16] [2] [17]
donde se busca hacer simple la compresión de esta tecnología pretendiendo despertar el
interés de los lectores. Una de las etapas fundamentales en los FLS Tipo-2 es la reducción
de tipo donde se encuentra la mayor dificultad para poder aplicarla en sistemas reales ya
que requiere un esfuerzo computacional alto por este motivo se han realizado publicaciones
específicas sobre este tema [18] [19] [20] la forma en que se realiza esta reducción de tipo
es utilizando algoritmos definidos en [21] [22].
En el capítulo 8 se encuentran referenciados publicaciones realizadas en la última década
donde se utiliza sistemas fuzzy logic tipo-2 para una respuesta más eficiente que métodos
ya conocidos, entre las aplicaciones que se destacan esta los filtros adaptativos fuzzy tipo-2,
en comunicaciones, en medicina en la realización de diagnósticos, en clasificación de
información y en sistemas de control para motores y robots móviles.
3 INCERTIDUMBRE EN UN FLS
La incertidumbre es un fenómeno que se puede encontrar en cualquier evento que se
presente en la naturaleza, para la ingeniería en el transcurso de los años ha sido todo un
paradigma ya que poder controlar o tomar una determinada decisión cuando esta se
presenta es todo un reto, a continuación se realiza una breve descripción de lo que es la
incertidumbre y como se ve reflejada en los sistemas de control.
La incertidumbre viene en muchas máscaras y es independiente del tipo de metodología
que se use para manejarlas. Una de las mejores fuentes para abordar la incertidumbre es
[23]. El profesor Klir y sus estudiantes han investigado la incertidumbre desde 1980,
trabajo del cual han aportado conceptos definiciones y características, en el cual se destacan
3 factores básicos de la misma que especifican su naturaleza, características y ocurrencia,
resultados que se resumen en la tabla 3-1.
Ocurrencia “Cuando se trata de problemas del mundo real, podemos raramente evitar
la incertidumbre. En el nivel empírico, la incertidumbre es una compañía
inseparable de casi cualquier medición, resultando desde una combinación
de errores inevitables en la medición y en los límites de la resolución en
los instrumentos de medición. Como el nivel cognitivo, este emerge desde
la vaguedad y ambigüedad inherente en el lenguaje natural, en el nivel
social, la incertidumbre tiene incluso usos estratégicos y es a menudo
creado y mantenido por personas para diferentes propósitos (privacidad,
secreto, propiedad).”

Causas “La incertidumbre involucrada en cualquier situación de solución de
problemas es un resultado de algunas deficiencias en la información. La
información (pertenecientes al modelo dentro del cual la situación es
conceptualizada) puede ser incompleta, fragmentada, no es completamente
fiable, vaga, contradictoria, o deficiente de alguna u otra manera. En
general, estas diversas deficiencias en la información pueden resultar en
diferentes tipos de incertidumbre.”
Naturaleza “La incertidumbre involucrada en cualquier situación de solución de
problemas es un resultado de algunas deficiencias en la información. La
información (pertenecientes al modelo dentro del cual la situación es
conceptualizada) puede ser incompleta, fragmentada, no es completamente
fiable, vaga, contradictoria, o deficiente de alguna u otra manera. En
general, estas diversas deficiencias en la información pueden resultar en
diferentes tipos de incertidumbre.”
Tabla 3-1: Ocurrencia, causas y naturaleza de la incertidumbre según Klir [23]
Ellos dividen estos tres tipos de incertidumbre en dos clases mayores, fussines y ambiguity,
donde ambiguity (“relación de una a muchas”) incluye nonspecificity y strife.
Otra fuente para una discusión general acerca de incertidumbre es [24], quien afirma, de
acuerdo a [23] que “la incertidumbre se deriva de la falta de información completa.” ellos
también afirman que la incertidumbre puede reflejar imprecisión, errores o falta de
información, o datos aleatorios en procesos.
Esto nos muestra que la incertidumbre está asociada con la imperfección del conocimiento
acerca del proceso natural o estado natural, presentándose las siguientes fuentes de
incertidumbre derivadas de este conocimiento impreciso [25]:
Incertidumbre en la medición, representa el error sobre las cantidades observadas
Incertidumbre en el proceso, resultado de la dinámica aleatoria de un sistema
Incertidumbre en el modelo, muestra las especificaciones equivocadas en la
estructura del modelo
Incertidumbre estimada, aparece de cualquiera de las incertidumbres previas o una
combinación de estas

Incertidumbre en la implementación, es la consecuencia de la variabilidad que
resulta desde políticas equivocadas, es decir incapacidad de encontrar el objetivo
estratégico exacto [25].
Figura 3-1: Sistemas Fuzzy Logic
Como describen los autores que se mencionaron anteriormente hay varios elementos que
intervienen e interactúan en la incertidumbre, cuando es vista sobre un sistema fuzzy logic
(FLS por sus siglas en inglés Fuzzy Logic System) como el que se muestra en la figura 3-1
se pueden identificar las siguientes fuentes de incertidumbre.
Incertidumbre sobre los significados de las palabras utilizadas en las reglas
Incertidumbre sobre la consecuencia utilizada en una regla
Incertidumbre sobre las mediciones que activan el FLS
Incertidumbre sobre los datos que son usados para afinar los parámetros de un FLS
[16]
Como un FLS consiste en reglas y las reglas usan palabras. De hecho, [26] ha promovido el
término “Calculo con palabras” (Computing With Word, CWW) y el uso de FL para
hacerlo. En su artículo del 1996, él dice [26]:
El cálculo con palabras es una necesidad cuando la información disponible es
demasiado imprecisa para justificar el uso de números y… cuando hay una
tolerancia para la imprecisión la cual puede ser explotada para conseguir
tratabilidad, robustez, bajo costo en la solución, y una mejor relación con la
realidad.
Fuzzy logic es una metodología para el cálculo con palabras
Utilizado por los seres humanos, las palabras tienen denotaciones fuzzy
Fuzzyficador
Reglas
Motor de
inferencia
Procesador
de salida Entrada
Clasica Salida
Clasica
Y

Un aspecto clave del CWW es que se trata de una fusión de los lenguajes naturales
y el cálculo con variables Fuzzy.
La tesis propuesta por Mendel y sus estudiantes es que “las palabras significan diferentes
cosas para diferentes personas” y de esta forma se encuentra incertidumbre asociada con
las palabras, lo que significa que FL debe de alguna manera usar esta incertidumbre cuando
calcula con palabras [2], este concepto es importante en la medida que un FLS puede tomar
sus datos a partir de expertos que pueden diferir en las palabras utilizadas para describir los
antecedentes y las consecuencias, en un estudio realizado por Mendel se realiza un encuesta
para clasificar una serie de oraciones en una escala de 0-10 como conclusiones de este
estudio se encuentra como algunas palabras pueden tener un significado igual para la
mayoría pero en general se solapan las diferentes opciones entregadas, todo esto se realizó
utilizando métodos estadísticos y probabilísticos con los datos tomados de la encuesta [3].
FL Tipo-1 maneja la incertidumbre sobre los significados de las palabras con el uso de
funciones de pertenencia precisas en las que el usuario considera puede capturar la
incertidumbre de las palabras. Una vez que la función de pertenencia Tipo-1 ha sido
encontrada, toda la incertidumbre sobre las palabras desaparece, porque las funciones de
pertenencia tipo-1 son totalmente precisas. FL tipo-2, por otro lado, maneja la
incertidumbre sobre el significado de las palabras modelando la incertidumbre. Esto se
logra por la borrosidad de los límites de la función de pertenencia tipo-1 en lo que
llamamos un footprint de la incertidumbre (footprint of uncertainty, fou). Aunque una
función de pertenencia tipo-2 también será totalmente precisa, este incluye el footprint de la
incertidumbre que entrega nuevos grados de libertad que permiten a la incertidumbre ser
manejada por un fls tipo-2 en formas totalmente nuevas [3].
Por otra parte las consecuencias de las reglas son obtenidas a partir de expertos, por medio
de explotación del conocimiento (ingeniería), o son extraídas directamente desde los datos.
En muchas situaciones los expertos no están de acuerdo, una encuesta a expertos por lo
general conduce a un histograma de posibilidades para la consecuencia de una regla. Este
histograma representa la incertidumbre sobre la consecuencia de una regla, y este tipo de
incertidumbre es diferente de la que se asocia con el significado de las palabras usadas en
las reglas, este histograma puede ser manejado por FL Tipo-2.
Las mediciones, elementos que son afectadas por la incertidumbre en FLS son usualmente
alteradas por el ruido; por lo tanto, son inciertas. Con este planteamiento no se pretende
abandonar las ideas tradicionales sobre mediciones de ruido (ej. Medida = señal + ruido).
La incertidumbre en las mediciones (ej. aleatoriedad en los datos) pueden ser modeladas
como conjuntos fuzzy (tipo-1 o tipo-2); por consiguiente, la incertidumbre sobre las
mediciones que activa el FLS parece estar de acuerdo con la nonspecificity cuando la
nonspecificity está asociada con la imprecisión basada en información [3].

Por último, un FLS contiene muchos parámetros de diseño cuyos valores deben ser
establecidos por el diseñador antes que el FLS sea operacional. Hay muchas formas de
hacer esto, y todos hacen uso de un conjunto de datos, usualmente llamado conjunto de
entrenamiento. Este conjunto consiste en un par de entradas-salidas para el FLS, y, si estas
parejas son señales medidas, entonces son tan inciertas como las medidas que activan el
FLS.
La incertidumbre sobre los datos que son usados para sintonizar los parámetros de un FLS,
también parece estar de acuerdo con la nonspecificity cuando la nonspecificity está
asociada con imprecisión basada en información.
Un FLS Tipo-2 es capaz de abordar directamente los tres tipos de incertidumbre—
fuzziness, strife y nonspecificity--- presentes en los diferentes elementos y fases de un FLS
y tienen la capacidad de hacer esto porque los FLS Tipo-2 modelan directamente la
incertidumbre.
4 Conjuntos fuzzy tipo-2
Figura 4-1: Conjunto fuzzy tipo-2
Un sistema de control que utiliza fuzzy logic tipo-2 se caracteriza porque los antecedentes y
las consecuencias están definidas por conjuntos fuzzy tipo-2, por tal motivo y poder lograr
entender el funcionamiento de un sistema fuzzy logic tipo-2 es necesario comprender
algunos conceptos básicos asociados a los conjuntos fuzzy tipo-2, los cuales son descritos a
continuación.
0x1
x2x3
x4x5
x6x7
x8x9
0
u1
u2
u3
u4
u5
u6
u7
u8
u9
1
0
1
0
1

4.1 Concepto de un conjunto Fuzzy Tipo-2
Para poder entender los conjuntos fuzzy debemos remitirnos a la teoría clásica de conjuntos
en la cual se define como conjuntos la reunión de varios elementos que cumplen una
característica o función, es decir que el conjunto está conformado por elementos que
cumplen una condición; esta condición es llamada función de pertenencia que para la teoría
clásica de conjuntos solo puede tener dos valores 0 ó 1, pertenece o no pertenece, si
generalizamos esta definición encontramos las funciones de pertenencia fuzzy logic tipo-1
(utilizadas en los conjuntos fuzzy tipo-1) en la cual un elemento puede pertenecer a más de
un conjunto en diferentes proporciones y esta pertenencia puede tomar un valor en el
intervalo [0,1], una función de pertenencia para este tipo de conjuntos está dada por
(3-1) Donde µA(x) es la función de pertenencia y está condicionada a estar entre 0 y 1 para todo x Є X, siendo una función de dos dimensiones (2D), ahora si generalizamos más podemos encontrar que la funciones de pertenencia para los conjuntos fuzzy tipo-2 en donde su grado de pertenencia es un conjunto fuzzy tipo-1, es decir que estos son conjuntos “fuzzy fuzzy” y de forma general se pueden definir por:
(3-2)
Donde x Є X, u Є Jx ⊆ [0,1] y 0 ≤ ≤ 1, este concepto de fuzzy logic tipo-2 que
introdujo Lofti Zadeth en 1975, permite modelar situaciones en donde es difícil determinar la función de pertenencia de un conjunto, así como los conjuntos fuzzy permiten manejar situaciones donde no se puede tener una pertenencia exacta a un conjunto, otra forma de interpretarlo es; cuando algo es incierto tenemos problemas determinando su valor exacto, en este caso utilizar conjuntos fuzzy tipo-1 tiene más sentido que utilizar conjuntos clásicos, pero aun en los conjuntos tipo-1 se definen funciones de pertenencia exactas, entonces surge la pregunta; si no podemos determinar el valor exacto de una cantidad incierta, como se puede determinar su pertenencia exacta a un conjunto? [3], es una crítica que es completamente válida para pertenencias tipo-2, pero esta segunda da una mayor aproximación a la incertidumbre al manejar un segundo intervalo que modela las variaciones provocadas por este valor incierto. En [3], [2] y en [27] utilizan como ejemplo para describir los conjuntos fuzzy tipo-2 la variable de interés “contacto visual” por ejemplo en un proceso de inspección en el aeropuerto, la variable denotada por x donde x Є [0,10] ; 0 representa ningún contacto visual y 10 representa un máximo contacto visual, para poder construir un conjunto fuzzy tipo-2 realizan una encuesta a 50 personas en las que se les solicita indicar cuál es el intervalo para la expresión “algún contacto visual” en el intervalo [0,10], lo más seguro es que los 50 conjuntos van a ser diferentes porque “las palabras significan diferentes cosas

para diferentes personas”, una forma de utilizar estos 50 conjuntos es calcular el valor promedio de los puntos finales para construir un intervalo asociado con “algún contacto visual”, si se define una función de pertenencia triangular (otras formas pueden ser utilizadas) para este intervalo, donde la base son el promedio de los puntos finales y el vértice superior está ubicado en el medio de estos dos puntos, esta función puede ser graficada en dos dimensiones; ver la función de pertenencia punteada de la figura 4.2, esta definición ignora completamente la incertidumbre presente en cada uno de los extremos del intervalo. Otra aproximación que se puede realizar es tomar el promedio de los valores extremos del intervalo y su desviación estándar, de esta forma establecer un intervalo de incertidumbre sobre los puntos finales (extremos del intervalo), que se puede representar por la gráfica mostrada en la figura 4-2 en la que podemos interpretar la desviación estándar como una distorsión sobre el valor promedio, y que representa la incertidumbre en los datos tomados, como se describió en la introducción una medición x=x’ de la variable de interés en un momento dado puede tomar cualquier valor en este espacio donde está la dispersión, luego cada valor de x pude llegar hasta N funciones de pertenencia teniendo µ1(x), µ2(x),……, µN(x) y cada función de pertenencia tiene un peso asociado wx1, wx2,….., wxN. De esta forma para cada x se tiene la función de pertenencia {(µi(x),wxi), i=1,2,…..,N} llamada función de pertenencia secundaria, partiendo de esta definición general empezamos a encontrar conceptos que deben ser comprendidos en los que se evidencian las características especiales de los conjuntos fuzzy tipo-2 que permiten modelar y manipular la incertidumbre presente en el mundo real.
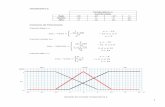
Figura 4-2: Función de pertenencia triangular para conjuntos fuzzy tipo-2
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FPS
FPI
Jx Pertenencia primaria
--------Conjuntos embebidos T1 y T2
------------------------- footprint of uncertainty
FPS
FPI
Jx Pertenencia primaria
--------Conjuntos embebidos T1 y T2
------------------------- footprint of uncertainty
FPS
FPI
Jx Pertenencia primaria
--------Conjuntos embebidos T1 y T2
------------------------- footprint of uncertainty
FPS
FPI
Jx Pertenencia primaria
--------Conjuntos embebidos T1 y T2
------------------------- footprint of uncertainty

4.2 Funciones de pertenencia Las funciones de pertenencia caracterizan los conjuntos fuzzy, que son Tipo-1 o Tipo-2, y en un FLS son asociadas con términos que aparecen en los antecedentes o consecuencias de las reglas, y con las entradas y salidas de los FLS [3]. Un conjunto fuzzy Tipo-1, A, que está en términos de una variable única, x Є X, está
definido como donde µA(x), está condicionada a estar entre 0 y 1 para todo x Є X, y es una función en dos dimensiones (2D) [3].
Un conjunto fuzzy Tipo-2 A, denotado por , es caracterizado por una función de
pertenencia tipo-2 donde x Є X y u Є Jx [0,1], esto quiere decir que la función de pertenencia tipo-2 está en términos de dos variables donde esta segunda variable le da una característica tridimensional y representa la incertidumbre presente en el sistema, es decir que para cada valor de x se pueden tener varios valores dados por u. La siguiente es la representación de una función de pertenencia tipo-2 [16]
(3-3)
En el cual 0 ≤ ≤ 1.
4.3 Conceptos asociados a conjuntos Fuzzy Tipo-2 Si se toma función de pertenencia tipo-1 representada por la gráfica punteada en la figura 4-2 y se representan puntos de forma aleatoria en su contorno no necesariamente con la misma distancia a la línea punteada, como esta en la figura 4-2. Entonces, a un valor especifico de x, digamos x’, ya no hay un único valor para la función de pertenencia; en cambio, la función de pertenencia toma siempre valores sobre la línea vertical cruzando desde el valor más cercano al eje x hasta el valor más lejano del eje x. El peso de estos valores no será igual para todos; por lo tanto, podemos asignar una distribución de amplitud a todos los puntos. Haciendo esto para todos los x Є X, creamos una función de pertenencia tridimensional—una función de pertenencia tipo-2—que caracteriza un conjunto fuzzy tipo-2. Ahora definimos un conjunto fuzzy tipo-2 destacando cada uno de los elementos principales presentes en el.
Definición 3-1: un conjunto fuzzy tipo-2 A, denotado por , es caracterizado por una función de pertenencia Tipo-2 , donde x Є X y u Є Jx ⊆ [0,1], es decir.
(3-4)

En el cual 0 ≤ ≤ 1. puede también ser expresado como
(3-5)
Donde ∫∫ denota unión sobre todos los x y u. Definición 3-2: en cada valor de x, digamos x=x’, el plano en 2D cuyos ejes son u y
es llamado corte vertical de . La función de pertenencia secundaria A es un
corte vertical de . Es para x’ Є X y , es decir.
(3-6)
En el cual 0 ≤ fx’(u) ≤ 1. Porque , dejamos caer la notación de prima sobre , y
se refiere a como una función se pertenencia secundaria; este es un conjunto Fuzzy
Tipo-1, la que también se le puede referir como un conjunto secundario. Basado en el concepto de conjuntos secundarios, podemos reinterpretar un conjunto Fuzzy Tipo-2 como la unión de todos los conjuntos secundarios, es decir. Usando (3-6), podemos
re-expresar utilizando el corte vertical, como:
(3-7)
Ó, como:
(3-8)
Definición 3-3: el dominio de una función de pertenencia secundaria es llamado la pertenencia primaria de x. En (3-8), Jx es la pertenencia primaria de x, donde
para . Definición 3-4: la amplitud de una función de pertenencia secundaria es llamada un grado secundario, en (3-8), es un grado secundario; en (3-6) es un
grado secundario. Si X y Jx son ambos discretos (cada uno por la formulación del problema o por la discretización del universo del discurso continuo), entonces la parte más derecha de (3-8) puede ser expresada como:

(3-9)
Observe que x ha sido discretizada entre N valores y cada uno de estos valores u ha sido discretizado en Mi valores. La discretización a lo largo de cada uik no tiene que ser la misma, por lo que se muestra una sumatoria diferente para cada uno de los términos entre corchetes. Sí, la discretización a lo largo de cada uik es la misma, entonces M1=M2=….=MN=M. Expresiones similares a (3-9) pueden ser escritas para casos mixtos donde X es continuo pero Jx es discreto, o viceversa. En este documento solo se trabaja con el caso descrito por (3-9), porque cuando una función de pertenencia Tipo-2 es programada, esta debe ser discretizada, no solo sobre X sino también sobre Jx. Definición 3-5: si se asume que cada una de las funciones de pertenencia secundarias de un conjunto fuzzy Tipo-2 tienen un solo grado secundario que es igual a 1. Una función de pertenencia principal es la unión de todos esos puntos en los que esto ocurre, es decir.
(3-10)
Y está asociado con un conjunto fuzzy Tipo-1.
Definición 3-6: la incertidumbre en la pertenencia primaria de un conjunto fuzzy Tipo-2, consiste en una región limitada que llamamos el footprint de la incertidumbre (FOU Footprint Of Uncertainty). Esto es la unión de todas las pertenencias primarias, es decir.
(3-11)
El concepto del FOU es muy útil, porque no solo centra la atención sobre la incertidumbre inherente en una función específica de pertenencia Tipo-2, cuya forma es una consecuencia directa de la naturaleza de estas incertidumbres, sino también entrega una muy conveniente descripción verbal del domino entero de soporte para todos los grados secundarios de una función pertenencia Tipo-2 [3]. Definición 3-7: Considerar un grupo de funciones de pertenencia Tipo-1 µA(x|p1,p2,…,pv) donde p1,p2,…,pv son parámetros, algunos o todos de los cuales cambian sobre un rango de valores, es decir. pi Є Pi (i=1,…, v). Una función de pertenencia primaria (MF) es una de estas funciones de pertenencia Tipo-1, es decir.
µA(x|p1=p1’, p2=p2’,…, pv=pv’,) (3-12) Para abreviar, se utiliza µA(x) para denotar una función de pertenencia primaria. Esto podría estar sujeto a algunas restricciones sobre sus parámetros. La familia de todas las funciones de pertenencia primaria crea un FOU.

Termino Significado
Variable primaria- Є X Variable interés. Ej. Presión, temperatura, ángulo
Pertenencia primaria- Jx
Cada valor de la variable primaria x tiene un
intervalo de valores de la MF. Jx’=[MF1(x’),
MFN(x’)]
Variable secundaria- u Є Jx Es un elemento de la pertenencia primaria, Jx’.
Ej. U1…,UN
Grado secundario- FX(u) El peso (posibilidad) asignado para cada variable
secundaria, fX’(u1)=WX’1
Conjunto Fuzzy Tipo-2 -- Ẫ
una MF tridimensional con el valor de un punto
es dado por (x,u,µA%(x,u)), donde x Є X, u Є
JX y 0 ≤ µA%(x,u) ≤ 1. Note que fX(u)=
µA%(x,u).
MF secundaria de x Un FS T1 de x, también llamado corte vertical.
Huella de incertidumbre de Ẫ -
FOU(A%)
La unión de todas las pertenencias primarias; el
dominio en 2-D de Ẫ ; el área entre UMF(A%) y
LMF(A%);
MF inferior de Ẫ- LMF(A%) o
µA%(x) El límite inferior de FOU(A%)
MF superior de Ẫ - UMF(A%) o
μA%(x) El límite superior de FOU(A%)
FS T1 embebido —Ae(x)
Cualquier FS T1 dentro de Ẫ que se extiende ∀x
Є X; también, es el dominio para un FS T2
embebido, LMF(A%) y UMF(A%).
FS T2 embebido —Ẫe(x) Comienza con un FS T1 embebido y grado
secundario adjunto a cada uno de su elementos
MF primaria
Dado un FS T1 con al menos un parámetro que
tiene un rango de valores. Una MF primaria es
uno de los FSs T1 cuyos parámetros se sitúan
dentro de los límites de los parámetros variables
Figura 4-3: Conceptos nuevos en Sistemas fuzzy tipo-2 [2]

4.4 Conjuntos fuzzy logic de intervalo tipo-2 (IT2FS-Interval Type-2
Fuzzy Set)
En la actualidad se cuenta con dispositivos de computo bastante avanzados y poderosos que
permiten realizar operaciones complejas, aun así poder colocar en un dispositivo un
desarrollo con Fuzzy Logic tipo-2 en su completa definición resulta poco práctico y lento,
por tal motivo los conjuntos fuzzy tipo-2 se llevaron a una forma particular de estos
conjuntos llamada conjuntos fuzzy logic de intervalo tipo-2, que hace posible utilizar todos
estos conceptos en un sistema real de forma eficiente y práctica, por tal motivo todos los
conceptos de fuzzy logic tipo-2 son llevados a esta forma particular y son tratados en el
presente documento. Un conjunto fuzzy de intervalo y tipo-2 esta caracterizado por:
(3-13)
(3-14)
Donde:
x = es la variable primaria que tiene un dominio X
= es la variable secundaria que tiene un dominio Jx para cada Jx =Pertenencia secundaria de x
El grado secundario de =1
(3-15)
Las funciones de pertenencia superior e inferior, UMF y LMF, respectivamente; son
funciones de pertenencia T1 que limitan el FOU.
UMF⇒ (3-16)
LMF⇒ (3-17)

Notar que Jx es un conjunto de intervalos, es decir:
(3-18)
Y el FOU( ) puede ser escrito como:
= (3-19)
Para universos del discurso continuos X y U un conjunto fuzzy IT2 embebido es:
(3-20)
En donde esto significa:
(3-21)
El conjunto esta embebido en tal que para cada x este solo tiene una variable
secundaria, es decir una pertenencia primaria cuyo grado secundario es igual a 1, ejemplos
son:
1/ (3-22)
Para universos del discurso discretos X y U en el cual X ha sido discretizada en N valores y
en cada uno de estos valores U ha sido discretizada en Mi valores un conjunto embebido
IT2FS tiene N elementos donde contiene exactamente un elemento desde Jx1, Jx2, … ,
JxN, llamémoslo u1, u2, …. uN, cada uno con un grado secundario igual a 1, es decir :
(3-23)
Esos conjuntos están embebidos en y se tienen un total de:

(3-24)
Asociados con se tienen unos conjuntos fuzzy tipo 1 (FS T1) embebidos donde:
(3-25)
Y esto significa que:
(3-26)
El conjunto que actúa como dominio de es la unión de todas las pertenencias
primarias del conjunto ejemplos de son:
(3-27)
En universos del discurso continuos hay un número incontable de FS IT2 y T1
embebidos en .
Para universos del discurso discretos X y U un FS T1 embebido tiene N elementos, cada
uno de Jx1, Jx2, … , JxN, llamémoslo u1, u2, …. uN, es decir:
(3-28)
es la unión de todas las pertenencias primarias del conjunto y tiene un total de
(3-29)
La siguiente tabla muestra un resumen de los conceptos sobre conjuntos fuzzy de intervalo
tipo-2

Símbolo Descripción
Conjunto fuzzy tipo-2
Pertenencia primaria de x
u Variable secundaria
FOU, FOU( ) Footprint of uncertainty
LMF - ,
UMF -
Función de pertenencia inferior
y superior
, Conjuntos fuzzy T2 embebidos
, Conjuntos fuzzy T1 embebidos
1/(·) Pertenencia secundaria es igual
a 1 para todos los elementos
Figura 4-4: Conceptos para conjuntos fuzzy de intervalo tipo-2
4.5 Teorema de la representación Para universos del discurso discretos X y U se define el teorema de la representación que es
derivado de los conceptos de conjuntos fuzzy embebidos y en el cual se da una definición
para un FS T2 , expresándolo como la unión de todos sus FS T2 embebidos, es decir:
(3-30)
Este teorema es aplicable también a FS IT2, en el cual X y U son discretos, el dominio de
es igual a la unión de todos sus FS T1 embebidos, así que puede ser expresado como:
(3-31)
Donde
(3-32)

5 Operaciones entre conjuntos Fuzzy Tipo-2
Considerar dos conjuntos fuzzy tipo-2 y , donde y son sus grados de
pertenencia (conjuntos fuzzy en ) y representada cada una en x como:
(4-1)
(4-2)
Respectivamente donde indicando la pertenencia primaria de x, y fx(u) , gx(u) son
un elemento que pertenecen al intervalo [0,1] e indican las pertenencia secundaria de x. Utilizando el principio de extensión de Zadeh’ los grados de pertenencia para la unión,
intersección y complemento de conjuntos fuzzy tipo-2 y han sido definidas como: Unión:
(4-3)
(4-4)
Intersección:
(4-5)
(4-6)
Complemento:
(4-7)
(4-8)
Donde ∨ representa la t-conorma max y ∗ representa una t-norma, los símbolos de integral indican una unión lógica. En las definiciones que se tienen para la unión, intersección y complemento en conjuntos fuzzy tipo-2 que resultaron de utilizar el principio de extensión de Zadeh aparecen las operaciones (operaciones lógicas) ⊔ (join), ⊓(meet) y ¬ (negacion). Cuando las funciones son discretas los símbolos de integración se sustituyen por símbolos de sumatoria en la representación de la unión lógica.

Si en la unión mas de un cálculo de v y w da el mismo punto entonces en la unión e intersección mantenemos el de mayor grado de pertenencia, un ejemplo en la unión para
representar el caso, supongamos y , entonces en el cálculo para la
unión se puede tener:
(4-9)
Donde el + denota la unión.
5.1 Join y meet bajo la t-norma mínimo Suponer que se tienen n conjuntos fuzzy tipo-2 reales, convexos, normales
caracterizadas por funciones de pertenencia respectivamente. Sean
números reales tal que y entonces
utilizando t-conorma max y la t-norma min, [9]
(4-10)
(4-11)
5.2 Unión La unión de 2 o mas conjuntos fuzzy tipo-2 puede ser definida como la unión de los conjuntos fuzzy tipo-2 embebidos como sigue: (Teorema de la representación)
(4-12)
(4-13)
Donde

(4-14)
Y h es una operación t-norma que cumple con:
1. ℎ(�, �) = ℎ(�, �) 2. 0 ≤ ℎ(�, �) ≤ 1 3. ℎ(1,1) = 1 4. ℎ(�, 0) = ℎ(0, �) = 0
donde ⋆ es una t-norma
Y se puede concluir que
(4-15)
La unión de conjuntos fuzzy tipo-2 es la unión de todos los join de los conjuntos fuzzy tipo-2 embebidos [3], y el join es la unión de todas las t-normas entre las funciones de pertenencia.
Ejemplo: dados los conjuntos y definidos por las funciones de pertenencia
(4-16)
(4-17)
Determinar
(4-18)
(4-19)
(4-20)
(4-21)
(4-22)
(4-23)

5.3 Intersección
La intersección de dos conjuntos fuzzy tipo-2 es otro conjunto fuzzy tipo-2
(4-24)
Utilizando el teorema de la representación, se puede representar la intersección de conjuntos fuzzy tipo-2 como:
(4-25)
Si
(4-26)
Y
(4-27)
(4-28)
Donde el operador ⋆ es una t-norma (mínimo o producto) que cumple con las 4 condiciones mencionadas en la unión [3]
(4-29)
(4-30)
(4-31)
Donde ⊓ denota la operación llamada meet.

Ejemplo: Sean los conjuntos fuzzy tipo-2 y , definidos por
y (4-32)
Calcular la intersección entre los dos conjuntos.
(4-32)
(4-33)
(4-34)
(4-35)
(4-36)
(4-37)
5.4 Complemento El complemento de un conjunto fuzzy tipo-2 es otro conjunto fuzzy tipo-2, tal que:
(4-38)
Utilizando el principio de extensión se tiene
(4-39)
(4-40)
Donde ¬ denota la operación llamada negación, y si se utiliza el teorema de la representación [3]
(4-41)

Ejemplo: sea el conjunto fuzzy tipo-2 con función de pertenencia determine el
complemento de .
(4-42)
(4-43)
(4-44)
6 Sistemas Fuzzy Logic Tipo-2
Un sistema Fuzzy Logic basado en reglas contiene cuatro componentes; las reglas, el
fuzzificador, el motor de inferencia, y el procesador de salida interconectados como se
muestra en la figura 5.1. Cuando las reglas son establecidas el sistema puede ser visto como
un mapeo de las entradas a las salidas y puede expresarse de forma cuantitativa como
y=f(x), este tipo de sistema es ampliamente usado en aplicaciones de ingeniería tales como
controladores Fuzzy Logic y procesadores de señales [3].
Figura 5-1: Sistema fuzzy logic general
Las reglas son el corazón de un sistema Fuzzy logic, las cuales pueden ser tomadas de los expertos o de datos numéricos, estas son expresadas como un grupo de preposiciones tipo Si… Entonces (If-Then), en donde la parte SI (If) de la regla es el antecedente y la parte entonces (Then) es la consecuencia.
Los conjuntos Fuzzy están asociados con términos que aparecen en las reglas ya sea en los antecedentes o en las consecuencias y también con las entradas y las salidas del sistema Fuzzy logic, estos conjuntos pueden ser de Tipo-1 o Tipo-2, la función de pertenencia que describe los conjuntos Fuzzy Tipo-1 es completamente cierta, mientras que la función de pertenencia para los conjuntos Fuzzy Tipo-2 es completamente difusa, de esta forma podemos encontrar sistemas Fuzzy Tipo-1 y Tipo-2 dependiendo de los conjuntos Fuzzy que describan el sistema [3], [28].
Fuzzyficador
Reglas
Motor de
inferencia
Procesador
de salida Entrada X Salida Y

Procesador de salida
Motor de
inferencia
Fuzzyficador
Reglas Defuzzyficado
r
Reductor de
tipo
Entradas
clásicas x
Conjuntos
Fuzzy entrada Conjuntos
Fuzzy Salida
Salidas
clásicas y
Dependiendo del conocimiento que sea usado para construir las reglas se debe elegir el tipo de conjunto a usar, en algunos casos este conocimiento presenta incertidumbre que podemos encontrar de cuatro formas, (1) en el significado de las palabras usadas en las reglas ya que las palabras pueden tener diferentes significados para diferentes personas, (2) las consecuencias obtenidas por un grupo de expertos pueden ser diferentes especialmente cuando estos no están de acuerdo, (3) las mediciones que activan el sistema pueden ser ruidosas, y (4) los datos usados para sintonizar los parámetros del sistema pueden ser ruidosos [16].
Otro de los elementos presentes en un sistema Fuzzy es el fuzzificador el cual mapea los números clásicos de la entrada en conjuntos Fuzzy, esto es necesario para activar las reglas que están en términos de variables lingüísticas las cuales tienen conjuntos Fuzzy asociados con ellas.
El motor de inferencia en un sistema fuzzy mapea conjuntos fuzzy en otros conjuntos fuzzy, esto muestra la forma en que las reglas son activadas y combinadas, de esta misma forma los seres humanos tomamos muchos diferentes tipos de procedimientos inferenciales para entender cosas o tomar decisiones.
Por último en un sistema fuzzy encontramos el procesador de salida que entrega números clásicos en las salidas del sistema, este proceso es conocido como defuzzificacion, cuando el sistema es Tipo-1 solo tiene el defuzzyficador, pero si es Tipo-2 el procesador de salida está compuesto por dos componentes el reductor de tipo (Type-reducer) que mapea un conjunto Tipo-2 en un conjunto Tipo-1 y el defuzzyficador que realiza el proceso defuzzificacion, la figura 5.2 muestra en sistema fuzzy lógic tipo-2 [3].
Figura 5-2: Sistema fuzzy logic tipo-2

6.1 Inferencia en conjuntos fuzzy tipo-2
Considerar un FLS T2 tiene p entradas y una salida . Si
se supone que este tiene M reglas donde la lth regla tiene la forma:
(5-1)
Esta regla representa una relación fuzzy tipo-2 entre el espacio de entrada
y el espacio de salida Y del FLS. Denotando la MF de esta relación fuzzy como:
(5-2)
Donde representa el producto cartesiano de , , …, y
.
Cuando una entrada es aplicada, la composición de un conjunto fuzzy, al cual
pertenece y la regla es encontrada por el uso de la composición sub-start extendida [15] .
(5-3)
Si se utiliza fuzzyficacion singleton, por lo tanto el conjunto fuzzy es tal que este tiene un grado de pertenencia 1 correspondiente a x=x’ y tiene grado de pertenencia 0 para todas las otras entradas, por lo tanto la ecuación (5-3) se reduce a:
(5-4)
Se denota como , el conjunto de salida correspondiente para la lth
regla, el extremo derecho de (5-4) es calculado utilizando la función de pertenencia implicación. En las aplicaciones de ingeniería de forma común se utiliza implicación producto o mínimo, que corresponde a la operación meet con la t-norm producto o mínimo, y (5-4) puede ser reescrito como:
(5-5)
La función de pertenencia para un producto cartesiano de conjuntos es calculada mediante la búsqueda del meet entre las funciones de pertenencia de los conjuntos individuales, por lo tanto (5-5) puedes ser:

(5-6)
Donde se utiliza la misma operación para la t-norma y la inferencia. En [15] se muestra un ejemplo de la inferencia producto y mínimo para un sistema fuzzy logic tipo-2 de una entrada y una salida utilizando conjuntos tipo-2 con forma gaussiana. La incertidumbre en el grado de pertenencia primaria de una función de pertenencia tipo-2 se ve representada por FOU la región oscura en la figura 5-3 en el cual está la unión de todas las pertenencias primarias. Las áreas oscuras indican pertenencias secundarias mayores. La función de pertenencia principal, es decir, el conjunto de pertenencias primarias que tienen pertenencia secundaria igual a 1, son representados con una línea gruesa. El producto de la función de pertenencia (5-6) en la figura 5-3 C) fue obtenido mediante la búsqueda del meet bajo la t-norma producto del grado de pertenencia de x=4 con el grado de pertenencia para todos los puntos de la función consecuencia en b). Similarmente la función de inferencia mínimo en (5-6) en d) fue obtenida encontrando el meet bajo la t-norma mínimo del grado de pertenencia de x=4 con el grado de pertenencia de todos los puntos de la función consecuencia. Se observa que en ambos casos el resultado de la inferencia es un conjunto tipo-2. Se puede interpretar el comportamiento de las bandas sobre la función de pertenencia de la salida como una indicación de las incertidumbres combinadas de antecedentes y consecuencias.
Figura 5-3: Grafica de la inferencia Tipo-2 para producto y mínimo [15]

6.2 Reducción de tipo [15] El conjunto de salida para cada regla en FLS Tipo-2 es un conjunto fuzzy Tipo-2. El reductor de tipo combina todos estos conjuntos de salida en la misma forma que el defuzzificador combina las salidas de las reglas en un FLS Tipo-1, luego se calcula el centro geométrico sobre este conjunto tipo-2 y como resultado se llega a un conjunto tipo-1 que se le llama el conjunto “reducido de tipo”. El centro geométrico de un conjunto A tipo-1 cuyo dominio es discretizado en N puntos esta dado por:
(5-7)
De forma similar el centro geométrico de un conjunto tipo-2 , en donde el dominio esta discretizado en N puntos, puede ser definido utilizando el principio de extensión como sigue, sea entonces se tiene
(5-8)
Donde , esto significa que cada punto de tiene un grado de pertenencia fuzzy
tipo-1 asociado con el punto. Para encontrar el centro geométrico, se considera
cada posible combinación tal que . Para cada combinación se desarrolla
el cálculo del centro geométrico tipo-1 (5-7) utilizando en lugar de y para cada
punto en el centro geométrico tipo-1 se asigna grado de pertenencia igual a la t-norma del grado de pertenencia del en , se utiliza el centro geométrico tipo-1 ya que se están
realizando operaciones con los conjuntos fuzzy tipo-1 embebidos del sistema. Si más de una combinación de obtiene el mismo punto en el centro geométrico se mantiene el que
tenga el grado de pertenencia más grande [15]. Si se deja , entonces (5-8)
puede ser escrita como
(5-9)

Donde es tal que y indica la t-norma elegida.
Cuando se trabaja con conjuntos fuzzy en un universo del discurso continuo este debe ser discretizado ya que los conjuntos fuzzy tipo-1 embebidos son incontables, es decir que el dominio del conjunto debe ser discretizado en M puntos para el cálculo del centro geométrico donde el posible número de combinaciones es MN y es muy grande
para valores pequeños de M y N. En conclusión el conjunto reducido de tipo en un FLS tipo-2 es el centro geométrico de un conjunto de salida tipo-2, donde cada elemento del conjunto reducido de tipo es el centro geométrico de algún conjunto tipo-1 embebido en el conjunto de salida, el cual esta relacionado con la salida de algún FLS tipo-1 embebido en el FLS tipo-2, asi que el conjunto reducido de tipo es la reunión de todas las salidas de los FLS tipo-1 embebidos en el FLS tipo-2, permitiendo representar la salida del sistema como un conjunto fuzzy en lugar de un número clásico [15]. En la literatura se pueden encontrar varios métodos para calcular el conjunto reducido de tipo entre los que se puede encontrar los siguientes
a. Reducción de tipo por centro geométrico El defuzzificador por centro geométrico combina los conjuntos de salida fuzzy tipo-1 utilizando una t-conorma y busca el centro geométrico de este conjunto. Si se denota el conjunto fuzzy de salida como B, donde
(5-10)
Con funciones de pertenencia asociadas , y es la función de pertenencia del conjunto de salida para la lth regla, entonces el defuzzificador por centro geométrico esta dado como:
(5-11) Donde la salida del conjunto B ha sido discritizada entre N puntos. La reducción de tipo por centro geométrico combina todas las salidas de las reglas de
conjuntos fuzzy tipo-2, , por la búsqueda de la unión y como la unión de conjuntos fuzzy tipo-2 esta definida por el join de sus funciones de pertenencia, el centro geométrico esta dado por (5-12) [3]

(5-12)
Donde es la función de pertenencia secundaria para la lth regla esta definida en (5-
8), y la reducción de tipo por centro geométrico se calcula en . Donde el centro
geométrico utilizando la notación de (5-8), , puede ser expresado como
(5-13)
Donde . En esta ecuación , y están asociadas con y se muestra
como una función explicita de x porque cada en (5-12) es una función de entrada x en el FLS. Para diferentes entradas en FLS, se obtienen diferentes valores de .
Una secuencia práctica de cálculos para obtener está basada en el siguiente procedimiento de cinco pasos [15] [3]:
1. Calcular utilizando (5-12). Esto es posible porque se tendrá siempre
calculado para todo .
2. Discretizar el dominio y entre N puntos .
3. Discretizar cada entre un número adecuado de puntos, por decir
4. Enumerar todos los conjuntos tipo-1 embebidos de ; se encontraran . 5. Calcular el centro geométrico del conjunto tipo-reducido utilizando (5-13); es decir,
calcular el centro geométrico de cada conjunto tipo-1 embebido enumerado y asignar a este un grado de pertenencia igual a la t-norma del grado secundario correspondiente a los conjuntos tipo-1 enumerados. Se debe utilizar la t-norma mínimo.
Los cálculos del centro geométrico y pertenencia tienen que ser repetidos veces y así, esto genera una sobre carga computacional en el cálculo para la reducción de tipo. b. Reducción de tipo por centro de sumas
En la defuzzificación por centro de sumas combina las salidas de conjuntos fuzzy tipo-1 añadiéndolos; es decir,

(5-14)
Y entonces se busca el centro geométrico de este conjunto. El defuzzificador por centro de sumas puede ser expresado como
(5-15)
Donde denota el centro geométrico del lth conjunto de salida y denota el área de este conjunto. El subíndice a en y indica la combinación aditiva. El reductor de tipo por centro de sumas combina los conjuntos de salida de las reglas tipo-2 por la suma de su función de pertenencia secundaria y entonces encuentra el centro geométrico del conjunto tipo-2 resultante; es decir, el conjunto reducido de tipo por centro
de sumas . La manera más sencilla de calcular ; es encontrando el centro geométrico de la suma de las funciones de pertenencia secundarias de salida, así como el reductor de tipo por centro geométrico encuentra el centro geométrico de la unión de los conjuntos de salida. La ecuación (5-13) puede ser utilizada para este propósito [3], donde
(5-16)
Y , y están ahora asociadas con . Para cada valor de , para calcular la parte derecha de (5-16) se puede utilizar (5-17)
(5-17) Donde ⋆ indica la t-norma, mínimo, o producto. La secuencia de cálculos necesitados para obtener es exactamente la misma como se describió para , excepto que en el paso
1 se calcula para el conjunto combinado de salida en (5-16).
c. Reducción de tipo por altura El defuzzificador por altura reemplaza el conjunto de salida de cada regla por el singleton en el punto que tiene la pertenencia máxima en el conjunto de salida, y entonces calcula el centro geométrico del conjunto tipo-1 compuesto de estos singletons. La salida de un defuzzificador por altura está dada como [3]

(5-18)
Donde es el punto que tiene la pertenencia máxima en el lth conjunto de salida (si hay
más de estos puntos, su promedio es tomado como ) y su grado de pertenencia en el lth
conjunto de salida es . El reductor de tipo por altura remplaza cada conjunto de salida tipo-2 por un conjunto de salida tipo-2 cuyo dominio y consiste de un punto único ( ), en el cual la función de pertenencia secundaria es un conjunto fuzzy tipo-1. El lth conjunto de salida es
reemplazado por un singleton situado en , donde puede ser elegido como el punto que tiene la pertenencia primaria más alta en la función de pertenencia principal del conjunto de
salida [3]. La expresión para el conjunto tipo-reducido por altura es obtenido como una extensión de (5-18), como
(5-19)
En esta ecuación, , y están asociados con .
Una secuencia práctica de cálculos para obtener es como sigue [3]:
1. Elegir el conjunto de salida de cada regla .
2. Discretizar la pertenencia primaria de cada , , entre un número adecuado de
puntos, por decir . La discretizacion se lleva a cabo de una manera similar a la tipo de reducción centro geométrico y centro de sumas, la única diferencia es que el número de puntos sobre el eje horizontal es ahora M (el numero de reglas) en lugar de N.
3. Enumerar todas las combinaciones posibles tales que ; habrá combinaciones.

4. Calcular el conjunto reducido de tipo por altura utilizando (5-19). Puesto que el dominio del conjunto de salida combinado es discreto, se puede utilizar la t-norma producto o mínimo en (5-19).
En el paso 4, la suma ponderada y cálculos de pertenencias en (5-19) tiene que ser repetido
veces. Generalmente (donde N es el número y de puntos en el caso de la reducción de tipo por centro geométrico o centro de sumas). Así, calcular el conjunto reducido de tipo por altura generalmente involucra mucho menos cálculos.
d. Reducción de tipo por centro de conjuntos En la defuzzificacion por centro de conjuntos se remplaza cada conjunto consecuente de la regla por un singleton situado en su centro geométrico y entonces busca el centro geométrico del conjunto tipo-1 compuesto por estos singletons. La expresión para la salida está dada como
(5-20)
Donde T indica la t-norma elegida, y es el centro geométrico del lth conjunto consecuente.
El reductor de tipo por centro de conjuntos reemplaza cada conjunto consecuente tipo-2, ,
por su centro geométrico, siendo este un conjunto tipo-1 y, como en (5-20), se encuentra una promedio ponderado de estos centros geométricos. El peso asociado con el lth centro geométrico es el grado de activación correspondiente para la lth regla, a saber
. Note que es tambien un conjunto tipo-1. La expresión para el conjunto reducido de tipo por centro de conjuntos es ahora el de un centro geométrico generalizado, y está dado por la siguiente extensión de (5-20)
(5-21) Donde T y ⋆ indican la t-norma elegida.
Una secuencia práctica de cálculos para obtener es como sigue [3]:

1. Discretizar el espacio de salida Y entre un número alcanzable de puntos, y calcular
el centro geométrico de cada conjunto consecuente sobre el espacio de salida discretizado utilizando (5-8). Estos centros geométricos de conjuntos consecuentes pueden ser calculados previamente y guardarlos para un uso futuro.
2. Calcular el grado de activación asociado con el lth conjunto
consecuente utilizando (4-10). Note que es un conjunto fuzzy tipo-1 .
3. Discretizar el dominio de cada conjunto fuzzy tipo-1 entre un número adecuado
de puntos, es decir .
4. Discretizar el dominio de cada conjunto fuzzy tipo-1 entre un número adecuado
de puntos, es decir .
5. Enumerar todas las posibles combinaciones tal que y
. El número total de combinaciones es . 6. Calcular el conjunto reducido de tipo por centro de sumas utilizando (5-21). Ya que
hay exactamente M y , donde M es el número de reglas, se puede utilizar la t-norma producto o mínimo en (5-21).
En el paso 6 la suma ponderada y las operaciones t-norma en (5-21) se repiten veces. Este número es, en general, mayor que el requerido para la reducción de tipo por altura, pero es menos que el requerido para la reducción de tipo por centro geométrico y por centro de sumas. Si las consecuencias solo son conjuntos fuzzy tipo-2 (como en función de la aproximación),
así que todos los grados de activación son números clásicos, entonces se reduce a
(5-22)
Note que esta fórmula derivada desde en (5-20) en la que es reemplazado por
.
6.3 Defuzzificador Se defuzzifica el conjunto reducido de tipo para poder obtener una salida clásica desde un sistema fuzzy logic tipo-2. La forma mas sencilla de realizarlo parece ser calculando el centro geométrico del conjunto reducido de tipo. Encontrar el centro geométrico es equivalente a encontrar el peso promedio de las salidas para todos los FLS tipo-1 embebidos en el FLS tipo-2, donde los pesos corresponden a las pertenencias en el conjunto

reducido de tipo. Si el conjunto reducido de tipo Y para una entrada x es discretizado en N puntos, la expresión de su centro geométrico es:
(5-23)
Si el conjunto reducido de tipo tiene solo un punto con pertenencia unitaria y si se quiere reducir la complejidad computacional, se puede que pensar que una elección sencilla para el valor defuzzificado es el punto con pertenencia unitaria en el conjunto reducido de tipo. Esta elección es tomar solo la salida correspondiente para la función de pertenencia del FLS tipo-1 principal embebido en el FLS tipo-2, y por lo tanto no trasmite la incertidumbre presente en la función de pertenencia, por tal motivo no tiene sentido tomar este punto a no ser que el conjunto reducido de tipo sea simétrico y convexo en tal caso sería el mismo centro geométrico, por lo general el conjunto reducido de tipo no es simétrico por lo tanto el centro geométrico es diferente al punto con altura unitaria [15] [3]. Si el numero puntos N es grande los datos almacenados pueden ser un problema para el cálculo de (5-23), una alternativa de solución es utilizar procesamiento paralelo en la reducción de tipo y la salida de cada procesador puede ser agregada utilizando el defuzzificador por centro geométrico para de esta forma obtener un valor clásico. Cuando se dificulta el procesamiento paralelo es posible utilizar un método recursivo para reducir considerablemente las necesidades de memoria, almacenando los datos necesarios al calcular la salida defuzzificada, (5-23) puede ser calculada [15] [3]
(5-24)
(5-25)
Para i=1,2,…,N y después de realizar la Nth iteración, la salida defuzzificada está dada por
(5-26)
7 GUI en Matlab para Sistemas de Intervalo Fuzzy Tipo-2 Para complementar el estudio se propone la utilización de un conjunto de programas en Matlab que a través de una GUI (interfaz gráfica de usuario) permite desarrollar las operaciones básicas entre dos conjuntos fuzzy de intervalo tipo-2 y un sistema fuzzy de intervalo tipo-2 con tres entradas (antecedentes) y una salida (consecuencia). Para la construcción de este programa se utilizaron funciones disponibles en [27] y que hacen parte del material de estudio disponible en este libro. En la bibliografía disponible se

pueden encontrar varias herramientas de software para manejar sistemas fuzzy logic de intervalo tipo-2, en [29] se desarrolló con una interfaz gráfica y con la posibilidad de realizar simulaciones en simulink, en [25] utilizan el bloque función de matlab desde simulink y una serie de funciones que pueden ser llamadas directamente desde la ventana de comandos, en [30] utilizan el toolbox sobre un problema de predicción, en [31] realizan el tooolbox sobre labview y [32] realiza también una herramienta para sistemas fuzzy de intervalo tipo-2 en java. Todas estas herramientas se centran en los sistemas fuzzy tipo-2 pero no incluyen las operaciones básicas en conjuntos fuzzy tipo-2, información importante para profesionales que se inicien en el mundo de fuzzy logic tipo-2. Durante la interacción con el software se deben colocar parámetros para cada conjunto de intervalo fuzzy tipo-2 que se cree por lo cual se debe definir las funciones límites del intervalo, es decir su función de pertenencia superior y la función de pertenencia inferior que son funciones tipo-1, esta definición se puede realizar utilizando diferentes formas entre las que se encuentran:
7.1 Funciones de pertenencia utilizadas Gaussiana definida por
(6-1) En donde se deben entregar los parámetros y c.
Figura 6-1: Grafica para una función gaussiana
Trapezoidal definida por
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;sigma,c)

(6-2) Para la cual se deben definir los parametros a,b,c y d.
Figura 6-2: Grafica para la función trapezoidal
Triangular definida por
(6-3)
Los parámetros que se deben agregar son a, b y c
Figura 6-3: Grafica para la función triangular
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;a,b,c,d)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;a,b,c)

7.2 Modulo conceptos básicos en conjuntos fuzzy tipo-2 El programa principal carga la interfaz gráfica para poder definir un sistema fuzzy tipo-2
completo, sin embargo en el menú de ayuda se agregó un módulo que ejecuta las
operaciones básicas entre conjuntos como son unión, intersección y complemento, cuando
el modulo es llamado se ve de la siguiente forma:
Figura 6-4: Interfaz inicial modulo conceptos fuzzy tipo-2
Lo primero que se debe realizar es ingresar los parámetros para las funciones de
pertenencia inferior y superior, como se describe anteriormente dependiendo de la forma
que con la que se quiera trabajar se deben colocar los parámetros que satisfacen cada
forma, así deben colocarse 2 parámetros para pertenencias que describen formas gaussiana
y 4 para las que son descritas por formas trapezoidales. Definir el universo del discurso
(UDD) por ultimo seleccionar la forma para la función de pertenencia, la siguiente grafica
muestra el resultado para una forma gaussiana en el conjunto A.

Figura 6-5: Ejemplo conjunto fuzzy de intervalo tipo-2 con forma Gaussina
En esta grafica se pueden observar las funciones superior e inferior que son el límite de la
gráfica y el área sombreada representa el FOU, la unión de todos los conjuntos fuzzy tipo-
1 que están embebidos en el sistema y es la representación directa de la incertidumbre.
Cuando se tiene los conjuntos de intervalo tipo-2 A y B cargados en el sistema se debe
seleccionar al operación de conjuntos que se quiere verificar, la figura 6-6 muestra el
resultado de cargar en el conjunto A una función gaussiana, en el B una trapezoidal y la
unión de estos dos conjuntos, como resultado se obtiene un conjunto también de intervalo
tipo-2, en el cálculo de estas operaciones se utiliza funciones entregadas por el profesor
Mendel y su estudiante Wu en [27].
Figura 6-6: Unión de intervalo tipo-2 para los conjuntos A y B en el módulo Conceptos Fuzzy Tipo-2
7.3 Interfaz gráfica propuesta para sistemas fuzzy de intervalo tipo-2
Como se describe en el capítulo 5 un sistema fuzzy tipo-2 consta de 5 partes principales, la
fuzzificacion, reglas, el motor de inferencia, el reductor de tipo y el defuzzificador para
sistemas fuzzy de intervalo tipo-2, la interfaz gráfica tiene estos mismos módulos
principales en donde como entrada se deben definir el número de entradas y salidas
colocando las funciones de pertenencia correspondientes (formas, parámetros y universo
del discurso) y las reglas que definen como se comporta el sistema. Y como salida se
obtiene un análisis grafico de cómo se comporta el sistema, en el anexo 1 hay un tutorial de
uso para la interfaz gráfica.
La siguiente grafica muestra un sistema fuzzy de intervalo tipo-2 con dos entradas y una
salida para el cual se deben definir los conjuntos que representan la entras y los conjuntos
que representan la salida.

Figura 6-7: Interfaz gráfica principal para definir entradas y salidas en un sistema fuzzy de intervalo tipo-2
Definidos los parámetros de las funciones de entrada y salida se deben definir las reglas
para el sistema, se ingresa por el menú editar y seleccionar editor de reglas en donde se
parametriza el sistema, como se muestra en la figura 6-8.
Figura 6-8: Interfaz gráfica para definir y editar las reglas del sistema
Con el ingreso de las entradas / salidas y las reglas que gobiernan el sistema se puede
procedes al análisis del sistema utilizando el analizador de reglas y el analizador del área.

Figura 6-9: Analizador de reglas
Figura 6-10: Analizador de superficie

8 Aplicaciones y ejercicios propuestos de estudio
8.1 Aplicación de controladores Fuzzy Logic Tipo-2 Los controladores Fuzzy Logic tipo-1 han sido utilizados de forma exitosa en muchos
campos y aplicaciones, sin embargo para sistemas no estructurados y en ambientes
dinámicos, estos no tienen las características para poder manejar los niveles altos de
incertidumbre por su definición utilizando conjuntos fuzzy tipo-1.
Con los avances en Fuzzy Logic Tipo-2 y su aplicación en el desarrollo de controladores se
ofrecen grados de libertad adicionales permitiendo modelar y manejar la incertidumbre
presente en los ambientes dinámicos y sistemas no estructurados.
Debido a la naturaleza de los sistemas Fuzzy Logic Tipo-2 y su facultad de modelar
funciones de pertenencia que no son exactas se ha utilizado en aplicaciones como filtros
adaptativo Fuzzy (FAF) Tipo-2 en la ecualización de canales no lineales variables en el
tiempo como se muestra en [33], donde el FAF basado en Tipo-2 ha superado su
contraparte Tipo-1. En [34], los FAFs Tipo-2 se han utilizado en la superación de
interferencias en canales variantes en el tiempo donde los resultados de simulación han
demostrado que los ecualizadores basados en FAFs Tipo-2 se desempeñan mejor que los
ecualizadores basados en FAFs Tipo-1 cuando el número de canales es mucho mayor que
1. Otras aplicaciones donde se han utilizado los sistemas fuzzy logic tipo-2 clasificación
multi-categoria de vehículos terrestres [35] y [36] donde se demuestra que la respuesta de
los sistemas fuzzy tipo-2 es mucho mejor que en los sistemas fuzzy tipo-1. En varios
estudios e investicaciones se ha demostrado la funcionalidad de los sistemas fuzzy tipo-2
como en análisis de sistemas de video MPEG con tasa de bit variable [37], en temas
relacionados en las comunicaciones inalámbricas y en acceso a redes ATM [38] [39] [40],
en el diagnóstico de enfermedades [41] [42] [43].
En control fuzzy logic tipo-2 ha sido utilizado para diseñar controladores de velocidad [44],
y en la trayectoria/navegación de robots móviles donde se demuestra la respuesta eficiente
[45], [46], para estas dos últimas aplicaciones se muestra como la respuesta que entregan es
mucho más eficiente que la ofrecida con controladores convencionales como PID y
controladores fuzzy tipo-1.
8.2 Ejemplo controladores de intervalo tipo-2 “Control de velocidad para
motores marinos”
El presente ejemplo está basado en el trabajo presentado en el artículo “Embedded Type-2
FLC for Real-Time Speed Control of Marine & Traction Diesel Engines” realizado por
Christopher Lynch, Hani Hagras, Victor Callaghan el cual muestra una de las posibles

aplicaciones en las que es útil el uso de controladores fuzzy de intervalo tipo-2, se muestra
como ejemplo ya que el presente proyecto sirve como parte de las herramientas que se
pueden utilizar en el análisis y desarrollo de trabajos con características similares.
Descripción del ambiente:
El motor diésel marino de propulsión y tracción opera bajo ambientes altamente dinámicos
e inciertos, y estos deben tener un control de velocidad robusto y exacto, hasta la fecha se
han utilizado controladores PID y fuzzy logic implementados sobre controladores
industriales embebidos, los cuales no pueden trabajar con los altos niveles de incertidumbre
a los que están expuestos.
Por el ambiente en el que operan estos motores están expuestos a grandes cambios en
variables como la temperatura, altitud, combustible, humedad y carga. Estos cambios
reflejan incertidumbre para los controladores que pueden verse reflejadas en las siguientes
fuentes:
En la entrada del controlador que traslada la incertidumbre en las funciones de pertenencia de los antecedentes modelando los altos niveles de ruido electromagnético y por radio frecuencia que afectan los sensores. También las características de los sensores que cambian por variaciones del medio ambiente como son los grandes cambios en los gradientes de temperatura y humedad.
En la salida del controlador que traslada la incertidumbre en las funciones de pertenencia de las consecuencias, que puede ser generada por cambios en las características de los actuadores debido al desgaste y cambios del medio ambiente como la altitud que afecta directamente la combustión.
Incertidumbre en las condiciones de operación las cuales pueden deberse a cambios en la carga, cambios del combustible, y que puede ser trasladadas en las funciones de pertenencia de antecedentes y consecuencias.
Incertidumbre en la lingüística como el significado de las palabras que son utilizadas en antecedentes y consecuencias, agregando que los expertos no siempre están de acuerdo y dan diferentes consecuencias para el mismo antecedente lo que genera un histograma de posibilidades para la consecuencia de una regla.
Por tal motivo se hace importante elegir un controlador apropiado con la capacidad de
modelar y manejar la incertidumbre con la que operan a diario los motores diésel marinos.
Los controladores Fuzzy tipo-2 tienen una mejor respuesta cuando son expuestos a altos
niveles de incertidumbre desarrollando un mejor rendimiento de cara a esta incertidumbre,
la característica tridimensional de los conjuntos fuzzy tipo-2 y el footprint of uncertainty
(FOU) hace que utilizar estos conjuntos fuzzy se ofrezcan grados de libertad adicionales
permitiendo tener una mejor respuesta frente a la incertidumbre. Una de las etapas de un
controlador fuzzy tipo-2 es realzar la reducción de tipo lo que requiere la ejecución del
procedimiento iterativo basado en el algoritmo de Karnik y Mendel o el su algoritmo

mejorado con la dificultad que al utilizarlos sobre los controladores embebidos requieren un
uso mayor de procesamiento y de memoria ocasionando que la respuesta en tiempo real no
sea la apropiada.
Una forma de representar los conjuntos fuzzy tipo-2 es utilizando conjuntos fuzzy de
intervalo tipo-2 en cual la función de pertenencia secundaria es igual a 1, esto generaría un
controlador fuzzy de intervalo tipo-2 que también requiere del procedimiento iterativo de
Karnik y Mendel en la reducción de tipo, pero permite un manejo más sencillo de los
conjuntos fuzzy, en el trabajo desarrollado por [44] utilizan el método de limites interior y
exterior desarrollado por [22] como una aproximación del método iterativo de Karnik y
Mendel y en el trabajo realizado encontraron que la diferencia entre los dos métodos es
muy pequeña y utilizar el método [22] permite la implementación de controladores de
intervalo tipo-2 sobre sistemas embebidos para controlar motores diésel marinos en tiempo
real.
Diseño del controlador
En el trabajo realizado por [44] implementaron 4 controladores en cual se utilizan dos
antecedentes el error como la diferencia entre la velocidad deseada y el la velocidad
medida, y la tasa de cambio de este error como la de/dt; una consecuencia el voltaje
entregado al motor. Los 4 controladores desarrollados son PID, Fuzzy Logic, Fuzzy Logic
de intervalo tipo-2 utilizando el método iterativo KM que llamaron “Iterative type-2 FLC” ,
por ultimo Fuzzy Logic de intervalo tipo-2 utilizando el método de limites interior y
exterior WM que llamaron “Bounds type-2 FLC”, la siguiente tabla muestra un resumen de
los diseños realizados.
Controlador PID Controlador Fuzzy Logic Controlado Fuzzy Logic de
intervalo tipo-2 (KM y WM)
Es el controlador más
utilizado para motores
diésel marinos, la siguiente
ecuación muestra la forma
discreta para ser
implementada en
controladores embebidos
Para este controlador
utilizaron formas
triangulares y trapezoidales
para definir los diferentes
conjuntos de los
antecedentes y
consecuencias. Para
antecedentes 3 conjuntos y
la consecuencia 5 conjuntos
y una base de 9 reglas.
En estos controladores se
utilizaron formas triangulares
trapezoidales con
incertidumbre en los
extremos, para los
antecedentes y consecuencias,
reduciendo el número de
conjuntos a 2 en el caso de los
antecedentes, en 4 para la
consecuencia y una base de 4
reglas.

Donde n es la muestra
actual, un es la variable
manipulada, Kp la ganancia
proporcional, Ti el tiempo
integral, Td el tiempo
derivativo, en el error actual
y Ts el periodo de muestreo
en segundos.
Antecedentes
Consecuencia
Reglas
d/e N Z P
N NG NP PG
Z NG Z PG
P NG PP PG
Antecedentes
Consecuencia
Reglas
d/e Neg Pos
Neg NegG PosP
Pos NegP PosG
Figura 7-1: Tabla resumen ejemplo de control para motores diésel marinos
Utilizando estas definiciones realizadas en [44] para la definición del controlador fuzzy de
intervalo tipo-2 se implementó en el software entregado en el presente proyecto para
mostrar la funcionalidad que ofrece en el cual resulto la superficie de control mostrada en la
figura 1

Figura 7-2: Superficie de control para controlador de motores marinos mostrado en [44]
También se modelo controlador tipo-1 en el toolbox fuzzy disponible en Matlab para fuzzy
logic tipo-1 en el cual dio la siguiente superficie de control mostrada en la figura 2.
Figura 7-3: Superficie de control para el controlador tipo-1 resultante del toolbox fuzzy de Matlab
Estos resultados muestran como un controlador de intervalo tipo-2 tiene una respuesta más
suave, que se evidencia en los cambios de estado donde tiene una transición curva para el
caso del controlador de intervalo tipo-2, mientras en el controlador tipo-1 resulta con
cambios fuertes.
Esta respuesta la confirman los resultados de las pruebas realizadas por [44] para los 4
controladores probados donde frente a diferentes alteraciones los controladores de intervalo
tipo-2 tienen una mejor respuesta como lo muestra la figura 3.

Figura 7-4: Resultados de las pruebas realizadas en [44]
9 Resultados
Al finalizar el trabajo se obtiene un documento con la información necesaria para
introducirse en fuzzy logic tipo-2 en el cual se puede encontrar en el capitulo 1 una
introducción al tema mostrando la relación con fuzzy logic tipo-1, con una corta
comparación resaltando su mayor diferencia; el poder modelar y manejar la incertidumbre,
en el capítulo 2 se aborda la incertidumbre como concepto importante a tener en cuenta
para la compresión de Fuzzy logic tipo-2 y el valor que aporta para el modelamiento y
manejo de problemas reales, el capítulo 3 y 4 muestra los conceptos básicos de conjuntos
fuzzy tipo-2 y operaciones que son el soporte matemático que permite trabajar con sistemas
fuzzy tipo-2, por último el capítulo 5 describe los elementos principales de un sistema
fuzzy logic tipo-2 fuzzyficador, motor de inferencia, base de reglas, reductor de tipo y
defuzzyficador.

El otro elemento que resulta del trabajo realizado es una herramienta de simulación que
apoya el material registrado en el documento, esta herramienta fue desarrollada en Matlab
en un ambiente gráfico, permitiendo ver el comportamiento de un sistema mostrando
gráficamente la funciones de entrada y la respuesta de este al ser tratado con fuzzy logic
tipo-2.
10 Conclusiones
El difícil acceso a la información relacionada con Fuzzy Logic Tipo-2 hace mas larga y
difícil la investigación, en el proceso de adquisición de material requirió de un considerable
tiempo iniciando por identificar los conceptos básicos para luego encontrar en ellos temas e
ideas principales que se requieren como complemento del tema investigado, lo que
ocasionó que el tiempo invertido fuera mucho mayor del planeado.
Los conceptos manejados en esta teoría son densos y la nomenclatura utilizada para
expresar las diferentes definiciones, teoremas y conceptos matemáticos por lo cual se
requiere un alto grado de concentración al momento de introducirse en fuzzy logic tipo-2,
asi como tener una comprensión de su antecesor fuzzy logic tipo-1, ayuda de forma
significativa el abordar fuzzy logic tipo-2.
La posibilidad que ofrecen los sistemas fuzzy logic tipo-2 de manejar la incertidumbre
presente en la naturaleza y rápido crecimiento en capacidad de procesamiento hace que
utilizar fuzzy logic tipo-2 sea un importante conocimiento que se debe adquirir por los
profesionales en ingeniería, por eso lo importante del presente proyecto apoyando en la
introducción a la tecnología para que en futuros proyectos pueda ser mucho más utilizado
de forma práctica.

11 ANEXO 1 Tutorial Sistema de Fuzzy Logic de intervalo tipo-2 IT2FLSGUI
1. Introducción
IT2FLSGUI es una interfaz gráfica de usuario con el objetivo de ofrecer una introducción a
los conceptos Fuzzy Logic Tipo-2 y servir de herramienta para facilitar el aprendizaje de
esta tecnología, centrándose en conjuntos y sistema fuzzy de intervalo tipo-2 por su mayor
facilidad de llevar a un ambiente real y practico.
En ella se pueden encontrar una opción de poder realizar las operaciones básicas de
conjuntos fuzzy de intervalo tipo-2 como son unión, intersección y complemento, y
desarrollar la construcción de un sistema fuzzy logic tipo-2 definido por conjuntos fuzzy de
intervalo tipo-2.
2. Definiciones importantes
Como primera medida se debe conocer las características de las funciones de pertenencia
que se pueden utilizar para la definición de los diferentes conjuntos con sus
correspondientes parámetros entre los cuales se encuentran las siguientes:
Función gaussiana definida por la siguiente función y en la cual se deben definir los parámetros c y σ.
(1)
Figura A-1: Grafica para una función de pertenencia gaussiana
Función trapezoidal definida por la siguiente función en la cual se deben definir los
parámetros a, b, c y d que representan los 4 puntos principales de una un trapecio.
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;sigma,c)

(2)
Figura A-2: Grafica para un función de pertenencia trapezoidal
Función triangular definida por la siguiente función en la cual se deben definir los
parámetros a, b y c.
(3)
Figura A-3: Grafica para una función de pertenencia triangular
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;a,b,c,d)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;a,b,c)

Función S-shape definida por la siguiente función en la cual se deben definir los
parámetros a y b
(4)
Figura A-4: Grafica para una función de pertenencia s-shape
Función Z-shape definida por la siguiente función en la cual se deben definir los
parámetros a y b
(5)
Figura A-5: Grafica para un función de pertenencia z-shape
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;a,b)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(x;a,b)

3. Conjuntos Fuzzy de intervalo tipo-2
Los conjuntos fuzzy de intervalo tipo-2 son una forma simplificada de los conjuntos fuzzy
tipo-2 donde se definen todos los conjuntos son descritos por intervalos de conjuntos con la
pertenencia secundaria igual a 1, y está delimitada por dos conjuntos extremos llamados
funciones de pertenencia superior e inferior.
Figura A-6: Grafica para para un conjunto fuzzy de intervalo tipo-2 con forma gaussian
4. Iniciar a trabajar con IT2FLSGUI
Para iniciar a trabajar con la GUI para sistemas fuzzy de intervalo tipo-2, se debe cargar
previamente el programa en el ambiente de trabajo de Matlab, para lo cual se deben realizar
los siguientes pasos:
a. En la pestaña File seleccionar “Set Path…” y luego pulsar sobre “Add with Subfolders…” y seleccionar la ubicación donde está la carpeta IT2FLSGUI por ejemplo D:/IT2FLSGUI y pulsar aceptar.
b. Ejecutar FUZ en la ventana de trabajo de Matlab
Figura A-7: Ejecución del IT2FLSGUI en Matlab

Con el programa de la interfaz gráfica cargada en el ambiente de trabajo de Matlab, cada
vez que se quiera ejecutar se escribe el comando FUZ y abre de la siguiente forma:
Figura A-8: Selección tipo de fuzzificación
En la cual se debe seleccionar “Intervalo Tipo-2” del menú desplegable “TIPO
FUZZIFICACION” que habilita el menú despegable “METODO” permite seleccionar tres
opciones como se muestra en la imagen
A. CF Izquierda + CF Derecha B. CF Principal + FOU (Footprint of Uncertainty) C. CF Inferior + CF Superior
Figura A-9: Selección método

Al seleccionar el método para trabajar abre la ventana que permite seleccionar el número y
nombre de los antecedentes y consecuencias del sistema que se quiere analizar
Figura A-10: Definición de antecedentes y consecuencias
Al pulsar sobre “OK” el siguiente paso es definir el número de conjuntos y el universo del
discurso que tiene cada antecedente y consecuencia.
Figura A-11: Vista general del sistema fuzzy de intervalo tipo-2

Para cada entrada y salida se puede seleccionar la forma que define la función de
pertenencia según el sistema que se esté analizando, las formas que se pueden utilizar son
las descritas en la sección 2, el siguiente cuadro muestra un resumen junto con los
parámetros necesarios según la forma seleccionada.
Forma Parámetros
1 2 3 4
Gaussiana Sigma (σ) Centro (c) - -
Trapezoidal Base Izquierda (a) Pico Izquierda (b) Pico Derecha (c) Base Derecha (d)
Triangular Base Izquierda (a) Pico (b) Base Derecha (c) -
S-Shaped Inferior (a) Superior (b) - -
Z-Shaped Superior (a) Inferior (b) - -
Tabla 1: Formas para las funciones de pertenencia y sus parámetros
Según el método seleccionado cada conjunto necesita la definición de distintos parámetros
como se describe a continuación:
CF Izquierda + CF Derecha esta es la primera opción en la cual se especifican los
conjuntos fuzzy tipo-1 de los extremos izquierdo y derecho que luego son tratados para así
encontrar la funciones de pertenencia superior e inferior. La figura A-12 muestra las
diferentes opciones a editar.
Figura A-12: Parámetros para el método CF Izquierda + CF Derecha
FP Actual: es un menú despegable que permite seleccionar el conjunto sobre el cual se
quiere trabajar.
Cambiar Nombre: es un cuadro de texto editable para actualizar el nombre del conjunto
sobre el cual se está trabajando.
Forma LFS: es un menú despegable que permite seleccionar la forma que tiene el conjunto
fuzzy tipo-1 de la izquierda y bajo este menú hay un cuadro de texto editable que permite
colocar parámetros correspondientes según la forma seleccionada.

Forma RFS: es un menú despegable que permite seleccionar la forma que tiene el conjunto
fuzzy tipo-1 de la derecha y bajo este menú hay un cuadro de texto editable que permite
colocar parámetros correspondientes según la forma seleccionada.
CF Principal + FOU es la segunda opción en la cual se especifica la función de
pertenencia principal tipo 1 y se especifica el footprint de la incertidumbre (FOU), para
luego ser calculada la funciones de pertenencia superior e inferior. La figura A-13 muestra
las diferentes opciones a editar.
Figura A-13: Parámetros para el método CF Principal + FOU
FP Actual: es un menú despegable que permite seleccionar el conjunto sobre el cual se
quiere trabajar.
Cambiar Nombre: es un cuadro de texto editable para actualizar el nombre del conjunto
sobre el cual se está trabajando.
Forma PMF: es un menú desplegable que permite seleccionar la forma que tiene la función
de pertenencia principal, bajo este se encuentra un cuadro de texto donde se especifican los
parámetros correspondientes para la función seleccionada.
FOU: es una barra de desplazamiento que permite modificar el footprint de la
incertidumbre.
CF Inferior + CF Superior es el tercer método que se puede seleccionar en el cual se
especifican las funciones de pertenencia tipo-1 para limites superior e inferior. La figura A-
14 muestra las diferentes opciones a editar.
Figura A-14: Parámetros para el método CF Inferior + CF Superior

FP Actual: es un menú despegable que permite seleccionar el conjunto sobre el cual se
quiere trabajar.
Cambiar Nombre: es un cuadro de texto editable para actualizar el nombre del conjunto
sobre el cual se está trabajando.
Forma LMF: es un menú desplegable que permite seleccionar la forma para función de
pertenencia inferior, bajo este se encuentra un cuadro de texto editable donde se especifican
los parámetros para la forma seleccionada.
Forma UMF: es un menú desplegable que permite seleccionar la forma para función de
pertenencia superior, bajo este se encuentra un cuadro de texto editable donde se
especifican los parámetros para la forma seleccionada.
5. Editor de reglas
Al finalizar la definición del sistema colocando los antecedentes y consecuencias con sus
respectivos conjuntos y parámetros se debe agregar la base de reglas al sistema, para lo cual
se debe ir al menú editar y seleccionar reglas base, la figura A-15 muestra la interfaz que
permite la agregar las reglas del sistema.
Figura A-15: Editor de Reglas
En el editor de reglas tiene dos áreas principales, en la parte superior izquierda de la figura
15 se puede seleccionar el conector y las operaciones que se van a realizar para las t-
normas, t-conormas y el centroid.
En la parte inferior están los antecedentes y consecuencias con sus conjuntos donde se
crean las reglas de acuerdo al sistema en donde se pueden hacer tres acciones diferentes
agregar, modificar y eliminar.
6. Análisis de Reglas y de área

Una vez cargadas las reglas en la ventana principal del sistema se puede abrir el analizador
de reglas y el de área, que se pueden encontrar en el menú ver, las ventanas que resultan se
muestran en las figuras A-16 y A-17.
Figura A-16: Analizador de Reglas
Figura A-17: Analizador de Área

12 Bibliografía
[1] L. Zadeh, «Fuzzy sets,» Information and Control, vol. 8, nº 3, pp. 338-353, Junio
1965.
[2] J. M. Mendel, «Type-2 Fuzzy Sets and Systems: An Overview,» IEEE Computational
Intelligence Magazine, pp. 20-29, 2007.
[3] J. Mendel, Uncertain Rule-Based Fuzzy Logic Systems: Introduction and new
directions, Unated States: Prentice Hall PTR, 2001.
[4] L. Zadeh, «The Concept of a Linguistic Variable and its Application to Approximate
Reasoning I,» Information Sciences, vol. 8, nº 3, pp. 199-249, 1975.
[5] L. A. Zadeh, «The Concept of a Linguistic Variable and its Applications to
Approximate Reasoning II,» Information Sciences, vol. 8, pp. 301-357, 1975.
[6] L. A. Zadeh, «The Concept of a Linguistic Variable and its Applications to
Approximate Reasoning III,» Information Sciences, vol. 9, pp. 43-80, 1975.
[7] M. &. K. T. Mizumoto, «Some properties of fuzzy sets of type-2,» Information And
Control, vol. 31, p. 312 – 340, 1976.
[8] S. Wang, S.-M. Wang y Y. Liu, «Some Propeerties of Operations on Type-2 Fuzzy
Sets,» de Proceedings of the Seventh International Conference on Machine Learning
and Cybernetics, Kunming, 2008.
[9] N. N. Karnik y J. . M. Mendel , «Operations on type-2 fuzzy sets,» Fuzzy Sets and
Systems, vol. 122, p. 327–348, 2001.
[10] N. N. Karnik y J. M. Mendel, «Centroid of a type-2 fuzzy set,» Information Sciences,
vol. 132, pp. 195-220, 2001.
[11] J. Aisbett, J. T. Rickard y D. G. Morgenthaler, «Type-2 Fuzzy Sets as Functions on
Spaces,» IEEE Transactions On Fuzzy Systems, vol. 18, nº 4, pp. 841-844, 2010.
[12] S. Coupland y R. John, «Geometric Logical Operations for Type-2 Fuzzy Sets,» de
Pro ceedings of IPMU’08, Torremolinos (Malaga), 2008.
[13] M. Takács, «Uninorm Operations on Type-2 Fuzzy Sets,» de 12th International
Conference on Intelligent Engineering Systems, Miami, 2008.

[14] N. N. Karnik y J. M. Mendel, «Introduction to Type-2 Fuzzy Logic Systems,» de
Fuzzy Systems Proceedings, 1998. IEEE World Congress on Computational
Intelligence., The 1998 IEEE International Conference on, Anchorage, 1998.
[15] N. N. Karnik, J. M. Mendel y Q. Liang, «Type-2 Fuzzy Logic Systems,» IEEE
Transactions On Fuzzy Systems, vol. 7, nº 6, pp. 643-658, Diciembre 1999.
[16] J. &. B. J. R. Mendel, «Type-2 Fuzzy Sets Made Simple,» IEEE Transactions on
Fuzzy System, pp. 117-127, 2002.
[17] J. M. Mendel, R. I. John y F. Liu, «Interval Type-2 Fuzzy Logic Systems Made
Simple,» IEEE Transactions On Fuzzy Systems, vol. 14, nº 6, pp. 808-821, 2006.
[18] N. N. Karnik y J. M. Mendel, «Type-2 fuzzy logic systems: type-reduction,» de
Systems, Man, and Cybernetics, 1998. 1998 IEEE International Conference on, San
Diego, 1998.
[19] C.-L. Chen, S.-C. Chen y Y.-H. Kuo, «The Reduction of Interval Type-2 LR Fuzzy
Sets,» IEEE Transactions On Fuzzy Systems, vol. 22, nº 4, pp. 840-858, 2014.
[20] S. Greenfild, F. Chiclana y R. John, «Type-reduction of the discretised interval type-2
fuzzy set,» de FUZZ-IEEE, Korea, 2009.
[21] D. W. a. J. M. Mendel, «Enhanced Karnik-Mendel Algorithms,» IEEE Transaccions
on Fuzzy Systems, vol. 17, nº 4, pp. 923-934, 2002.
[22] H. Wu y J. M. Mendel, «Uncertainty Bounds and Their Use in the Design of Interval
Type-2 Fuzzy Logic Systems,» IEEE Transactions On Fuzzy Systems, pp. 622-639,
2002.
[23] G. J. Klir y M. J. Wireman, Uncertainty-Based Information, Heidelberg: Physica-
Verlag, 1998.
[24] H. R. Berinji, «Treatment Of Uncertainty in Artificial Intelligence,» de Machine
Intelligence and Autonomy Aerospace System, Washington DC, American Institute of
Aeronautics & Astronautics, 1988, pp. 233-247.
[25] O. C. L. G. M. Juan R. Castro, «Inteval Type-2 Fuzzy Logic Toolbox,» Engineering
Letters, 2007.
[26] L. A. Zadeh, «Fuzzy logic = computing with words,» Fuzzy Systems, IEEE
Transactions on, vol. 4, nº 2, pp. 103-111, Mayo 1996.

[27] J. M. Mendel y D. Wu, Perceptual Computing Aiding People in Making Subjective
Judgments, New Jersey: Jhon Wiley & Sons, Inc., 2010.
[28] J. Mendel, «Type-2 Fuzzy Sets and Systems: An Overview,» IEEE Computational
Intelligence Magazine, 2007.
[29] M. Bulut Ozek y Z. Hakan Akpolat, «A Software Tool: Type-2 Fuzzy Logic
Toolbox,» Computer Applications in Engineering Education, p. 137–146, 2008.
[30] M. Zamani, H. Nejati, A. T. Jahromi, A. R. Partovi, S. H. Nobari y G. N. Shirazi,
«Toolbox for Interval Type-2 Fuzzy Logic Systems,» de 11th Joint Conference on
Information Sciences , Shenzhen, 2008.
[31] M. Aria, «Interval Type-2 Fuzzy Logic Systems Toolbox,» Majalah Ilmiah UNIKOM,
pp. 43-50, 2011.
[32] C. Wagner, «Juzzy – A Java based Toolkit for Type-2 Fuzzy Logic,» de Advances in
Type-2 Fuzzy Logic Systems (T2FUZZ), 2013 IEEE Symposium on, Singapore, 2013.
[33] Q. Liang y J. M. Mendel, «Equalization of Nonlinear Time-Varying Channels Using
Type-2 Fuzzy Adaptive Filters,» IEEE Transactions On Fuzzy Systems, vol. 8, nº 5,
pp. 551-563, 2000.
[34] Q. Liang y J. M. Mendel, «Overcoming Time-Varying Co-Channel Interference Using
Type-2 Fuzzy Adaptive Filters,» IEEE Transactions On Circuits And Systems—II:
Analog And Digital Signal Processing, vol. 47, nº 12, pp. 1419-1428, 2000.
[35] H. Wu y J. M. Mendel, «Multi-Category Classification of Ground Vehicles Using
Fuzzy Logic Rule-Based Classifiers: Early Results,» de Proceedings of the IASTED
International Conference on Artificial Intelligence and Soft Computing, Banff, 2003.
[36] H. Wu y J. M. Mendel, «Classification of Battlefield Ground Vehicles Using Acoustic
Features and Fuzzy Logic Rule-Based Classifiers,» IEEE Transactions on Fuzzy
Systems, vol. 15, nº 1, pp. 56-72, 2007.
[37] Q. Liang y J. M. Mendel, «MPEG VBR Video Traffic Modeling and Classification
Using Fuzzy Technique,» IEEE Transactions On Fuzzy Systems, vol. 9, nº 1, pp. 183-
192, 2001.
[38] Q. Liang, N. N. Karnik y J. M. Mendel, «Connection Admission Control in ATM
Networks Using Survey-Based Type-2 Fuzzy Logic Systems,» IEEE Transactions On
Systems, Man, And Cybernetics, vol. 30, nº 3, pp. 329-339, 2000.

[39] H. Shu, Q. Liang y J. Gao, «Wireless Sensor Network Lifetime Analysis Using
Interval Type-2 Fuzzy Logic Systems,» IEEE Transactions On Fuzzy Systems, vol. 16,
nº 2, pp. 416-427, 2008.
[40] H. Shu y Q. Liang, «Wireless Sensor Network Lifetime Analysis Using Interval Type-
2 Fuzzy Logic Systems,» de The 2005 IEEE International Conference on Fuzzy
Systems, Arlington, 2005.
[41] P. R. Innocent y R. John, «Type-2 Fuzzy Diagnosis,» de Fuzzy Systems, 2002. FUZZ-
IEEE'02. Proceedings of the 2002 IEEE International Conference on, Honolulu, 2002.
[42] M. Fazel Zarandi, M. Zarinbal, A. Zarinbal, I. Turksen y M. Izadi, «Using Type-2
Fuzzy Function for Diagnosing Brain Tumors based on Image Processing Approach,»
de Fuzzy Systems (FUZZ), 2010 IEEE International Conference on, Barcelona, 2010.
[43] M. Zarinbal, M. Fazel Zarandi, I. Turksen y M. Izadid, «Interval Type-2 Fuzzy Image
Processing Expert System for Diagnosing Brain Tumors,» de Norbert Wiener in the
21st Century (21CW), 2014 IEEE Conference on, Boston, 2014.
[44] C. Lynch, H. Hagras y V. Callaghan, «Embedded Type-2 FLC for Real-Time Speed
Control of Marine & Traction Diesel Engines,» de The 2005 IEEE International
Conference on Fuzzy Systems, Colchester, 2005.
[45] L. Astudillo, O. Castillo, P. Melin, A. Alanis, J. Soria y L. T. Aguilar, «Intelligent
Control of an Autonomous Mobile Robot Using Type-2 Fuzzy Logic,» Engineering
Letters, Tijuana, 2006.
[46] C. W. a. H. Hagras, «Evolving Type-2 Fuzzy Logic Controllers for Autonomous
Mobile Robots,» Department of Computer Science, University of Essex,, 2007.
[47] D. Wu y J. M. Mendel, «Uncertainty measures for interval type-2 fuzzy sets,»
Information sciences, vol. 177, p. 5378–5393, 2007.
[48] C. L. Walker y E. A. Walker, «The Algebra of Truth Value s of Typ e-2 Fuzzy,» de
Interval / Probabilistic Uncertainty and Non-Classical Logics, New Mexico, Springer
Berlin Heidelberg, 2008, pp. 245-255.
[49] H. N. T. J. R. P. H. N. N. S. Mohsen Zamani, «Toolbox for Interval Type-2 Fuzzy
Logic,» de Proceedings of the 11th Joint Conference on Information Sciences, 2008.
[50] C. Lynch, H. Hagras y V. Callaghan, «Using Uncertainty Bounds in the Design of an
Embedded Real-Time Type-2 Neuro-Fuzzy Speed Controller for Marine Diesel

Engines,» de IEEE International Conference on Fuzzy Systems, Vancouver, 2006.
[51] Q. Liang y J. M. Mendel, «Interval Type-2 Fuzzy Logic Systems: Theory and
Design,» IEEE Transactions On Fuzzy Systems, vol. 8, nº 5, pp. 535-550, 2000.
[52] R. I. John, «Embedded Interval Valued Type-2 Fuzzy Sets,» de Proceedings of the
2002 IEEE International Conference, Honolulu, HI, 2002.
[53] L. Gu, «Web Shopping Expert Systems Using New Interval Type-2 Fuzzy
Reasoning,» Georgia State, 2006.
[54] O. Castillo, P. Melin y J. R. Castro, «Computational Intelligence Software for Interval
Type-2 Fuzzy Logic,» de Workshop on Building Computational Intelligence and
Machine Learning Virtual Organizations, Fairfax, 2008.