Delta Dirac
4
CAP˝TULO 1 Delta de Dirac 1.1 Impulso unitario Supongamos que tenemos que empujar un objeto: para ello podemos aplicarle una fuerza durante un periodo de tiempo t. Si queremos comunicarle una determi- nada energía cinética la fuerza F aplicada nos determina la duración t para alcanzar dicha energía cinética. Si aumentamos F el tiempo necesario será menor. En el límite cuando t ! 0 tendremos que aplicarle una fuerza infinita. Sería el equivalente físico a un "martillazo": un golpe instantáneo de gran fuerza. Con frecuencia, sobre los sistemas mecánicos, actúan fuerzas externas (o FEM so- bre los circuitos eléctricos) de gran magnitud sólo durante un lapso muy breve. Por ejemplo: 1. En un ala de aeroplano que se encuentre oscilando, puede caer un rayo, 2. cuando se da un golpe brusco a una masa en un resorte con un martillo, 3. o cuando una bola de baseball (golf o tenis), es puesta a volar golpeándola violen- tamente con un bate, un palo de golf o una raqueta. La función, " (t t o )= 8 > < > : 0, 0 6 t 6 t o " 1 2" , t o " 6 t 6 t o + " 0, t > t o + " (1.1) 1
-
Upload
juan-carlos-moreno-ortiz -
Category
Documents
-
view
58 -
download
2
Transcript of Delta Dirac

CAPÍTULO 1
Delta de Dirac
1.1 Impulso unitario
Supongamos que tenemos que empujar un objeto: para ello podemos aplicarleuna fuerza durante un periodo de tiempo t. Si queremos comunicarle una determi-nada energía cinética la fuerza F aplicada nos determina la duración t para alcanzardicha energía cinética. Si aumentamos F el tiempo necesario será menor. En el límitecuando t ! 0 tendremos que aplicarle una fuerza infinita. Sería el equivalente físico aun "martillazo": un golpe instantáneo de gran fuerza.
Con frecuencia, sobre los sistemas mecánicos, actúan fuerzas externas (o FEM so-bre los circuitos eléctricos) de gran magnitud sólo durante un lapso muy breve. Porejemplo:
1. En un ala de aeroplano que se encuentre oscilando, puede caer un rayo,
2. cuando se da un golpe brusco a una masa en un resorte con un martillo,
3. o cuando una bola de baseball (golf o tenis), es puesta a volar golpeándola violen-tamente con un bate, un palo de golf o una raqueta.
La función,
�" (t� to) =
8><>:0, 0 6 t 6 to � "12"
, to � " 6 t 6 to + "
0, t > to + "
(1.1)
1

CAPÍTULO 1. DELTA DE DIRAC
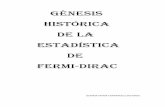
Figura (1.1): Representación de la función �" (t� to).
está representada en la figura 1.1(a) para " > 0, to > 0 y podría servir como modelomatemático para este tipo de fuerzas. Para valores pequeños de ", �" (t� to) es, esen-cialmente, una función constante de gran magnitud que se encuentra "encendida"sólo durante un lapso muy pequeño, alrededor de to. El comportamiento de �" (t� to)
cuando " ! 0 se muestra en la figura 1.1(b). A esta función, se le llama IMPULSO UNI-TARIO porque tiene la propiedad de integración,Z 1
0
�" (t� to) dt = 1 (1.2)
1.2 Delta de Dirac
En la práctica conviene trabajar con otro tipo de impulso unitario, con una "fun-ción" definida con el límite,
� (t� to) = lim"!0
�" (t� to) (1.3)
que se puede caracterizar mediante las dos propiedades siguientes:
� (t� to) =
(0, t 6= to
1, t = to(1.4)
1 =
Z 1
0
� (t� to) dt (1.5)
Prof. Terenzio Soldovieri C. MECANICA CUANTICA - 2011. Pág.: 2

1.2. DELTA DE DIRAC
A este impulso unitario se le denomina función DELTA DE DIRAC.Las propiedades (1.4) y (1.5) dejan claro que la función delta de Dirac no es una
función en el sentido rigurosamente matemático, puesto que la integral (1.5) (si existe)de una función que es nula en cualquier punto excepto en uno de ellos debe anularse.
Como ya hemos visto antes, podemos desarrollar cualquier vector de estado j (x)ien términos de un conjunto base ortonormal fj�n (x)ig mediante,
j (x)i =1X
n=�1an j�n (x)i (1.6)
A los an se les denominan coeficientes del desarrollo. Aquí se debe cumplir que,
h�n j�mi =Z 1
�1��n (x)�m (x) dx = �nm (1.7)
que es la condición de ortonormalidad para los elementos del conjunto base.
Es posible calcular ahora los an. Al multiplicar ambos miembros de (1.6) por h�m (x)jresulta,
h�m (x) j (x)i =1X
n=�1an h�m (x) j�n (x)i =
1Xn=�1
an�nm = am (1.8)
que al sustituirla en (1.6) resulta,
j (x)i =1X
n=�1h�n (x0) j (x0)i j�n (x)i (1.9)
que se denominan series generalizadas de Fourier.
Ahora bien, la anterior expresión puede ser escrita como,
j (x)i =
1Xn=�1
j (x0)i h�n (x0) j�n (x)i
=1X
n=�1j (x0)i
Z 1
�1��n (x
0)�n (x) dx0
=
Z 1
n=�1j (x0)i
" 1Xn=�1
��n (x0)�n (x)
#dx0
o,
j (x)i =Z 1
�1j (x0)i � (x� x0) dx0 (1.10)
donde,
� (x� x0) =1X
n=�1��n (x
0)�n (x) (1.11)
Prof. Terenzio Soldovieri C. MECANICA CUANTICA - 2011. Pág.: 3

CAPÍTULO 1. DELTA DE DIRAC
que no es más que la función delta de Dirac unidimensional y su propiedad más im-portante es la expresada en (1.10).
Es posible encontrar otras formas de expresar la función delta de Dirac. Considéreseel caso de las funciones armónicas,
�n (x) =1
(2l)1=2ein�
xl (1.12)
Sustituyendo (1.12) en (1.11) resulta,
� (x� x0) =
1Xn=�1
1
(2l)1=2e�in�
x0l
1
(2l)1=2ein�
xl
=1
2l
1Xn=�1
ein�(x�x0)
l
=1
2�
1Xn=�1
�keik(x�x0) (1.13)
donde k = n�=l y 12l= �k
2�puesto que �n = 1. Si l ! 1 (�k ! 0) en (1.13) la suma
cambia por una integral,
� (x� x0) =1
2�
Z 1
�1eik(x�x
0)dk (1.14)
o,
� (x� x0) =1
2�liml!1
Z l
�leik(x�x
0)dk = liml!1
Sen [l (x� x0)]
� (x� x0)(1.15)
Las ecuaciones (1.14) y (1.15) son dos representaciones ámpliamente usadas parala función delta de Dirac. En tres dimensiones se escribe,
� (�!r ��!r 0) = � (x� x0) � (y � y0) � (z � z0) =1
(2�)3
Z 1
�1ei�!k �(�!r ��!r 0)d3k (1.16)
donde,� (�!r ) = 0, �!r 6= �!0
y, Z 1
�1� (�!r ��!r 0) d3r = 1 (1.17)
La delta de Dirac es par,
� (�!r ��!r 0) = � (�!r 0 ��!r ) (1.18)
Prof. Terenzio Soldovieri C. MECANICA CUANTICA - 2011. Pág.: 4