Control Automático · 2017-09-28 · Compensadores y reguladores en tiempo continuo y discreto ......
48
Control Automático Compensador de atraso en el lugar de las raíces
Transcript of Control Automático · 2017-09-28 · Compensadores y reguladores en tiempo continuo y discreto ......

Control Automático
Compensador de atraso en el lugar de las
raíces

Contenido
El compensador de atraso en el lugar de las
raíces
Cálculo del compensador atraso
Con realimentación unitaria
Con realimentación no unitaria
Ejemplos y ejercicios
Resumen
Referencias

Compensadores y reguladores en
tiempo continuo y discreto
Compensador de adelanto
Compensador de atraso
Compensador adelanto-atraso
Compensador de filtro de muesca
n
Cleadp
zkK
0
0)(
1
1)(p
zKlag
npnpp
nznzzCnotch kK
22
22
2
2)(
00 zp
11 zp
El compensador de atraso en
tiempo continuo
En altas frecuencias el compensador de atraso tiene
ganancia unitaria
En bajas frecuencias la ganancia es:
No importa si llamamos a los ceros y polos z0 y p0 o
z1 o p1.
1)(
)(lim)(lim
1
1
ps
zssK
ss
1)(
)(lim)(lim
1
1
1
1
00
p
z
ps
zssK
ss11 zp
Ganancia a bajas frecuencias
El término aparecerá multiplicando las
constantes de error de posición, velocidad y
aceleración (KP, KV o Ka)
POs
O
O
O
sO
sP K
p
zsG
p
zsG
ps
zssGsKK
0
0
00
0
00
^
)(lim)()(
)(lim)()(lim
VOs
Os
V Kp
zsGs
p
zsGssKK
0
0
00
0
0
^
)(lim)()(lim
aOs
Os
a Kp
zsGs
p
zsGsKsK
0
02
00
02
0
^
)(lim)()(lim
z
p
0
0

Ejemplo 2
Sintetice un regulador que haga que el sistema
tenga ante una entrada escalón una respuesta con: un sobreimpulso MP entre el 3% y el 10%
un tiempo de estabilización tS5% < 3 s
Un error de estado estacionario ante escalón
entre el 1% y el 3%
Escoja para punto s1 un valor de entre los siguientes:
a) -1.0 +/- j 1.6 b) -1.15 +/- j 1.25
c) -1.25 +/- j 1.0 d) -1.15 +/- j 2.0

Ejemplo 2: Solución
Escogemos el punto s1 = -1.15 +/- j 1.25
Cancelamos el polo en -1.5 con z0 = -1.5
El ángulo de la planta reducida en el polo
en s = -1.5, , evaluada en el punto s1 es:
-152.63º
El ángulo a agregar es:
= ±180º + = [27.37º, -332.63º]
Escogemos el valor = 27.37º ya que éste se
encuentra entre ±180º.
)(ˆ sG

Ejemplo 2: Gráficas con el
compensador de adelanto
56.3
5.172.1)(
s
ssKlead

Ejemplo 2: Cálculo de la
relación z0/p0
Ya que el sistema es tipo 0 y con
realimentación unitaria tenemos
De donde despejamos la relación cero-polo
Calculamos KP
PP Kp
zK
0
0^
P
P
K
K
p
z^
0
0
0.7247)()(lim0
sGsKK leads
P

Ejemplo 2: Cálculo de
Tomando el valor intermedio del 2% para el
error de estado estacionario; asumiendo que
está dado como un valor absoluto, y
despejando de la ecuación para el error
Calculamos los valores para el coeficiente de
error de posición deseado,
ss
ssP
e
eK
ˆ
ˆ1ˆ
02.0ˆ ;51
02.0ˆ ;49ˆ
SS
SS
Pe
eK
K
PK
Ejemplo 2: La ganancia
Usamos el valor positivo de
Redondeamos el valor a 68
Escogemos el cero de forma arbitraria en el
punto s = -0.5 y calculamos el polo
67.61247247.0
49
0
0 p
z
68
00
zp
0.0074
5.0
s
sKlag
PK
Ejemplo 2: Final
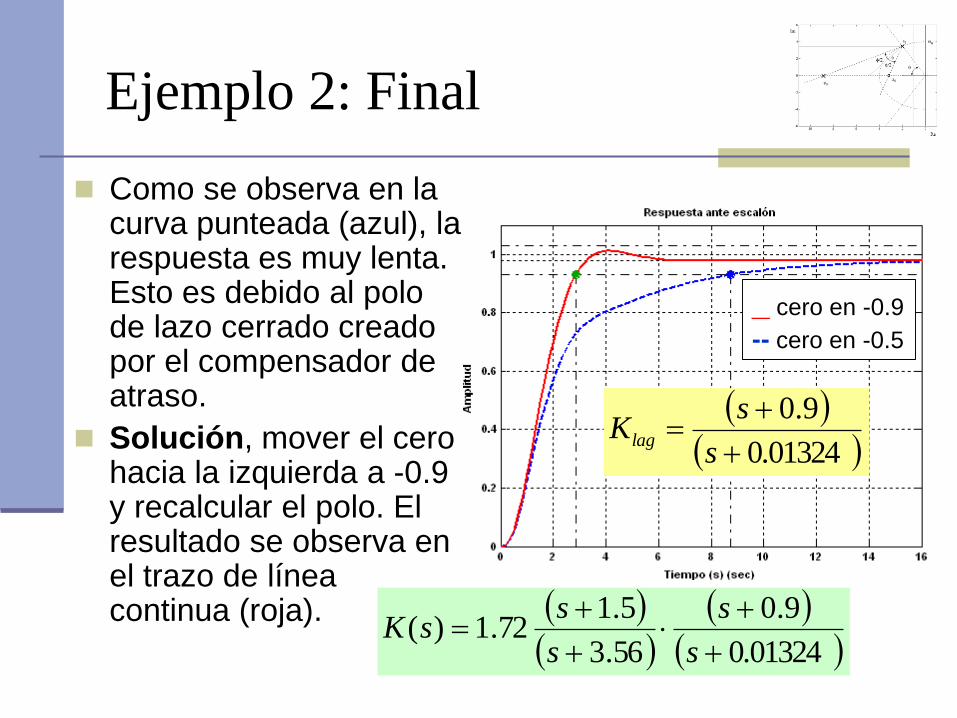
Como se observa en la curva punteada (azul), la respuesta es muy lenta. Esto es debido al polo de lazo cerrado creado por el compensador de atraso.
Solución, mover el cero hacia la izquierda a -0.9 y recalcular el polo. El resultado se observa en el trazo de línea continua (roja).
0.01324
9.0
s
sKlag
0.01324
9.0
56.3
5.172.1)(
s
s
s
ssK
_ cero en -0.9
-- cero en -0.5

Ejemplo 2: Conclusiones
El compensador de atraso permite corregir el error de estado estacionario en aquellos casos donde el desempeño de un simple regulador proporcional no es satisfactorio.
Hay que escoger la ubicación del cero del compensador de tal manera que los polos de lazo cerrado del sistema no sean excesivamente lentos.
Sistemas tipo 0: Ubicar el cero lo más a la izquierda que se pueda (a la derecha del polo real más lento o a la derecha de los polos dominantes); sin afectar excesivamente la estabilidad y respuesta transitoria del sistema; o la forma deseada del lugar de las raíces.
Sistemas tipo 1: Ubicar el dipolo lo más cerca del origen
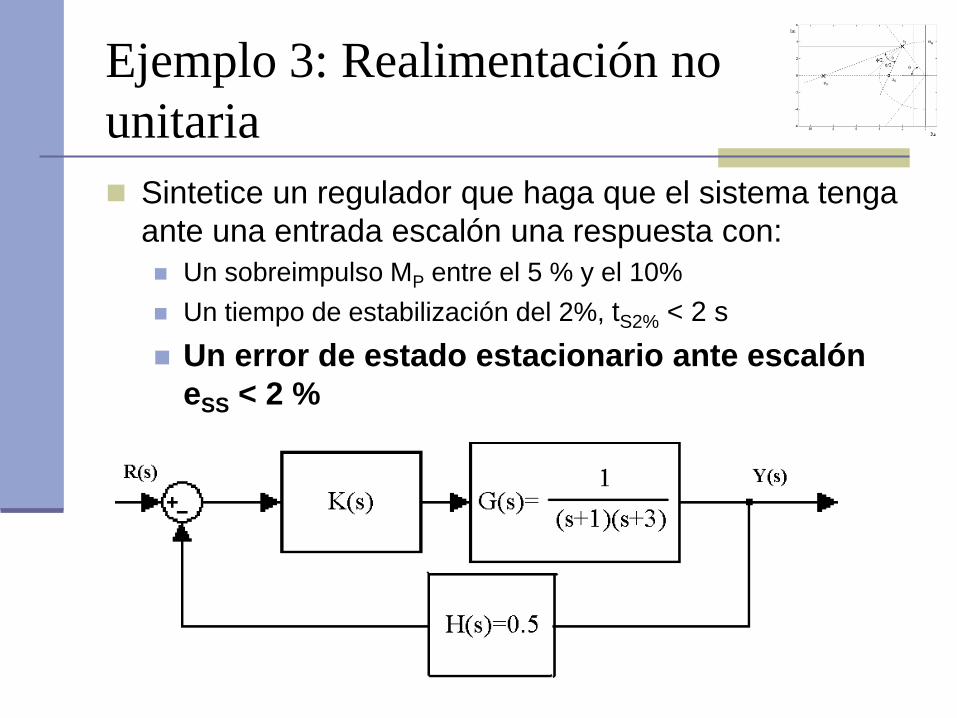
Ejemplo 3: Realimentación no
unitaria
Sintetice un regulador que haga que el sistema tenga
ante una entrada escalón una respuesta con:
Un sobreimpulso MP entre el 5 % y el 10%
Un tiempo de estabilización del 2%, tS2% < 2 s
Un error de estado estacionario ante escalón
eSS < 2 %

Ejemplo 3: Lugar de las raíces
Con el compensador de adelanto aplicado obtenemos
5.4
4.35.23)(
s
s sKlead

Ejemplo 3: Análisis a = 0
Colocamos la misma ganancia que tiene el
sensor a frecuencia cero (CD) en serie con la
entrada. En este caso la ganancia es 0.5.
-
+ y(t)r(t)Klag(s)
d(t)
)()(lim0
sGsKleads
5.0)(lim0
sHs
)(lim0
sHs
0.5
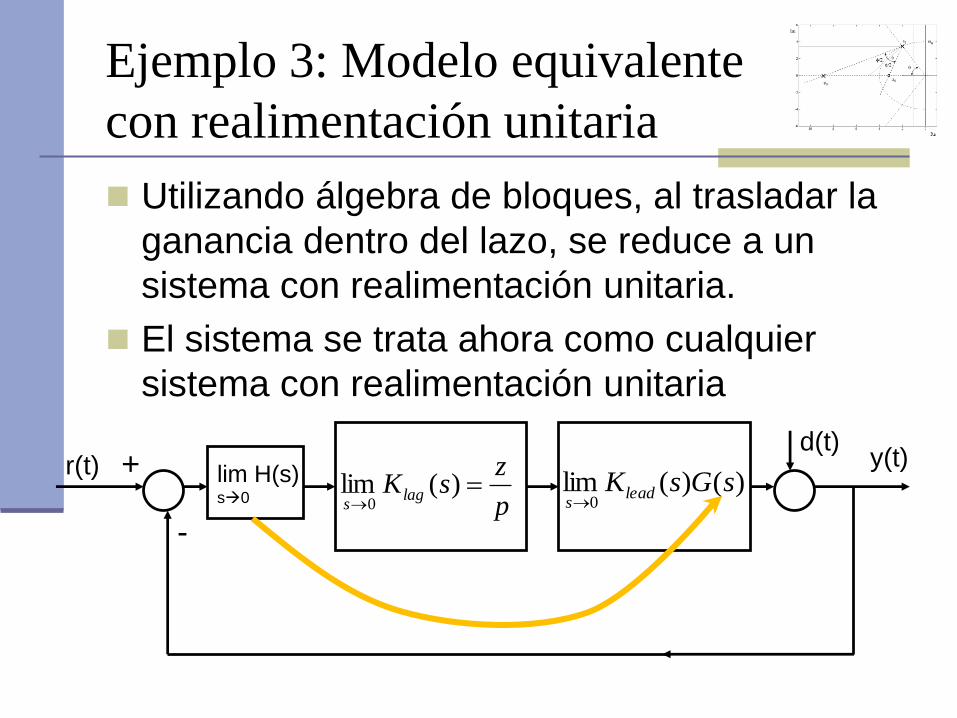
Ejemplo 3: Modelo equivalente
con realimentación unitaria
Utilizando álgebra de bloques, al trasladar la
ganancia dentro del lazo, se reduce a un
sistema con realimentación unitaria.
El sistema se trata ahora como cualquier
sistema con realimentación unitaria
-
+ y(t)r(t)d(t)
)()(lim0
sGsKleads
lim H(s)s0 p
zsKlag
s
)(lim
0

Utilizando álgebra de bloques, al trasladar la
ganancia dentro del lazo, se reduce a un
sistema con realimentación unitaria.
El sistema se trata ahora como cualquier
sistema con realimentación unitaria
Ejemplo 3: Modelo equivalente
con realimentación unitaria
-
y(t)r(t)d(t)
)()()(lim0
sHsGsKleadsp
zsKlag
s
)(lim
0
+
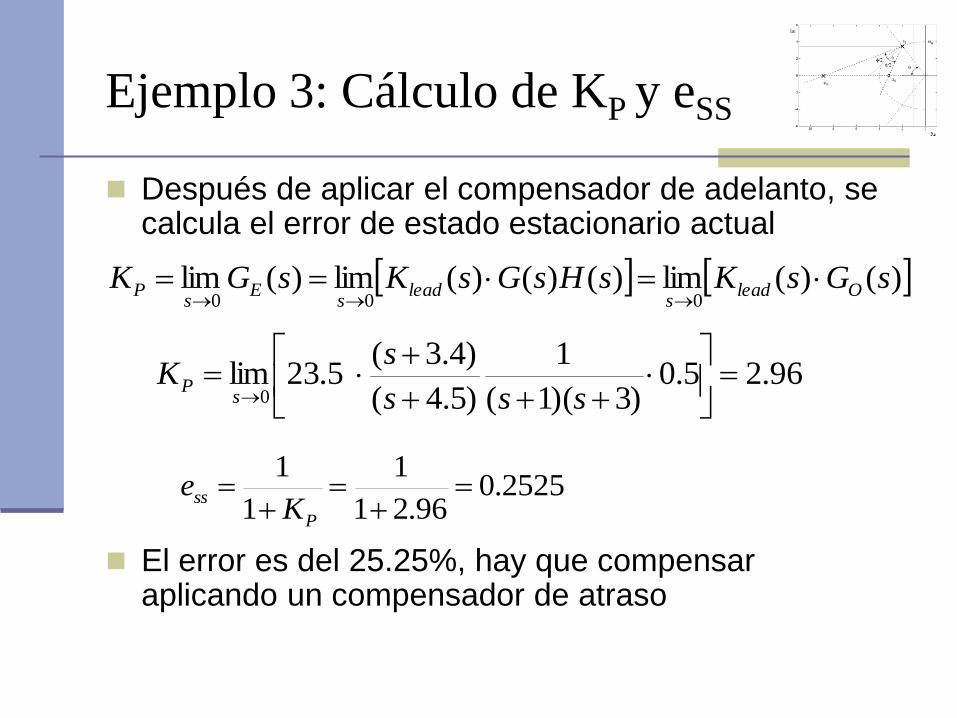
Ejemplo 3: Cálculo de KP y eSS
Después de aplicar el compensador de adelanto, se calcula el error de estado estacionario actual
El error es del 25.25%, hay que compensar aplicando un compensador de atraso
)()(lim)()()(lim)(lim000
sGsKsHsGsKsGK Oleads
leads
Es
P
96.25.0)3)(1(
1
)5.4(
)4.3(5.23lim
0
sss
s K
sP
2525.096.21
1
1
1
P
ssK
e
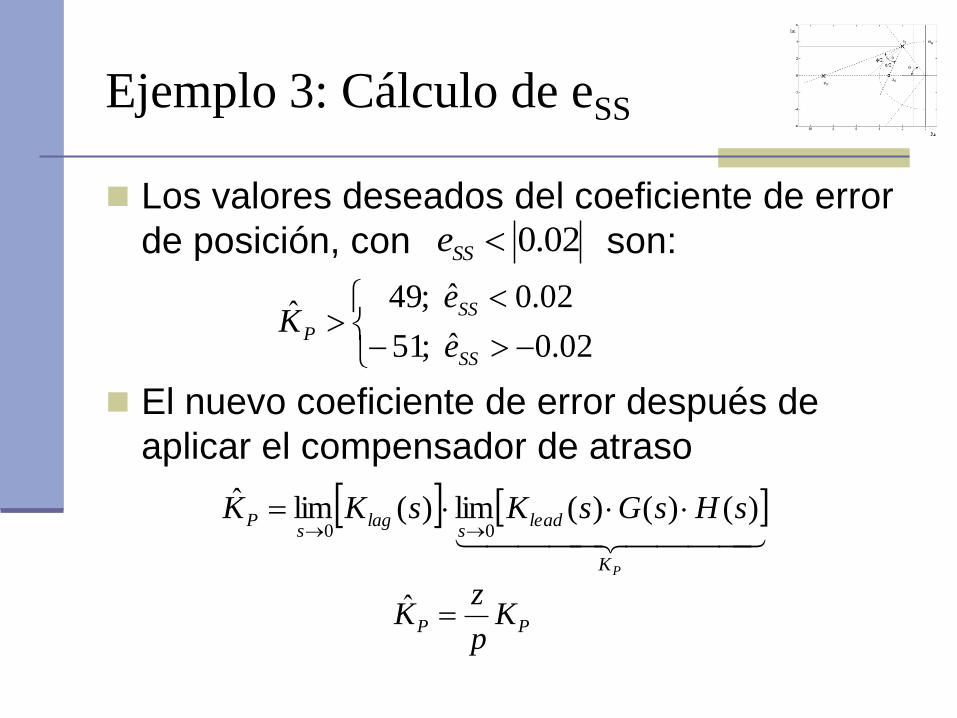
Ejemplo 3: Cálculo de eSS
Los valores deseados del coeficiente de error
de posición, con son:
El nuevo coeficiente de error después de
aplicar el compensador de atraso
02.0ˆ ;51
02.0ˆ ;49ˆ
SS
SS
Pe
eK
02.0SSe
PK
leads
lags
P sHsGsKsKK )()()(lim)(limˆ00
PP Kp
zK ˆ

Ejemplo 3: Encontrando la
relación z/p
Despejando y sustituyendo los valores
conocidos y usando el valor positivo de
Ubicamos el cero en el punto s = - 0.9 y
calculamos el polo con z/p = 17
55.1696.2
49
ˆ
p
z
K
K
p
z
P
P
PK
053.0
0.9
s
sKlag

Ejemplo 3: Compensador total
El precompensador de 0.5 y el compensador
de atraso-adelanto constituyen el resultado
de la síntesis.
H(s) = 0.5
-
+ y(t)r(t)0.5 Klag(s)Klead(s)
d(t)
)(sG)053.0)(5.4(
0.9))(4.3(5.23
ss
ss

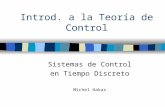
Ejemplo 3: Resultados
La respuesta se obtiene con el sistema con un precompensador
F = 0.5, igual a la ganancia CD del sensor H(s) y Klag(s)*Klead(s).Respuesta ante escalón
Tiempo [s] (sec)
Am
plitu
d
0 0.5 1 1.5 2 2.5 3-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Entrada r(t)
Entrada d(t)
ts = 1.65 y = 0.98Mp = 8.2%

Ejemplo 3: Conclusiones
La realimentación no unitaria afecta el cálculo
del compensador de adelanto, con su
dinámica, y el valor de kC con su ganancia
estática
Aplicando una ganancia estática F = H(0)
podemos simplificar el sistema a uno con
realimentación unitaria para calcular el
compensador de atraso.
Ejercicios (1)
Sintetice un regulador que haga que el sistema tenga
ante una entrada escalón una respuesta con:
un sobreimpulso menor al 5%
un tiempo de estabilización tS2% < 0.8 s
Un error de estado estacionario ante escalón < 1%
Escoja un punto s1 de entre los siguientes:
a) -5.25 +/- j 5.75 b) -4.5 +/- j 3.75 c) -5.25 +/- j 5.25
d) -2.25 +/- j 4 e) -1,5 +/- j 2.25

Solución Ejercicio 1
ZETA = 0.6901
zetaomegan = 5
s1 = -5.2500 + 5.2500i
gamma = 135.2842°
fi = [44.7158° -315.2842°]
theta = 45°
1.5921 (s+5.263)
Klead(s) ------------------------
(s+10.47)

Ejercicios (2)
Resuelva el ejemplo 2; pero, con H(s) = 2
Resuelva el ejemplo 2; pero, con
2
2)(
ssH

E. Interiano 37
Compensador de atraso
en tiempo discretoUna vez convertido a realimentación unitaria, para un
sistema tipo 0 compensado podemos calcular el error
de estado estacionario con
, donde
Por lo que, escogiendo adecuadamente la ubicación
del cero z1 a la derecha del polo dominante,
obtenemos el polo p1 como:
)()(lim1
zGzKK Oleadz
P
111
1
PP KK
zp
)()()(lim1
1
1zGzKzK
eOleadlag
z
ss
POleadlag
zP K
p
zzGzKzKK
1
1
1 1
1)()()(lim

E. Interiano 38
Ejemplo 4: Compensador
de adelanto-atraso en ZEncuentre para el sistema en tiempo discreto del ejemplo 4, con la planta G(z), con T = 0.1 s
a) El compensador digital de adelanto, por el método de la bisectriz, que haga que la respuesta de lazo cerrado ante un escalón tenga como características dinámicas:
Un sobreimpulso MP ≤ 10%
Un tiempo de estabilización del 2% tS ≤ 1.4 s
Use un punto z1 de los siguientes:
1) 0.675 ± j0.5 2) 0.675 ± j0.25 3) 0.7 ± j0.3 4) 0.8 ± j2
b) El compensador digital de atraso, que haga que el error de estado estacionario se encuentre entre el 1% y el 3% ante una entrada escalón.
0.8187)-(z 0.9048)-(z
0.9048)+(z 0.004528)( zG
E. Interiano 39
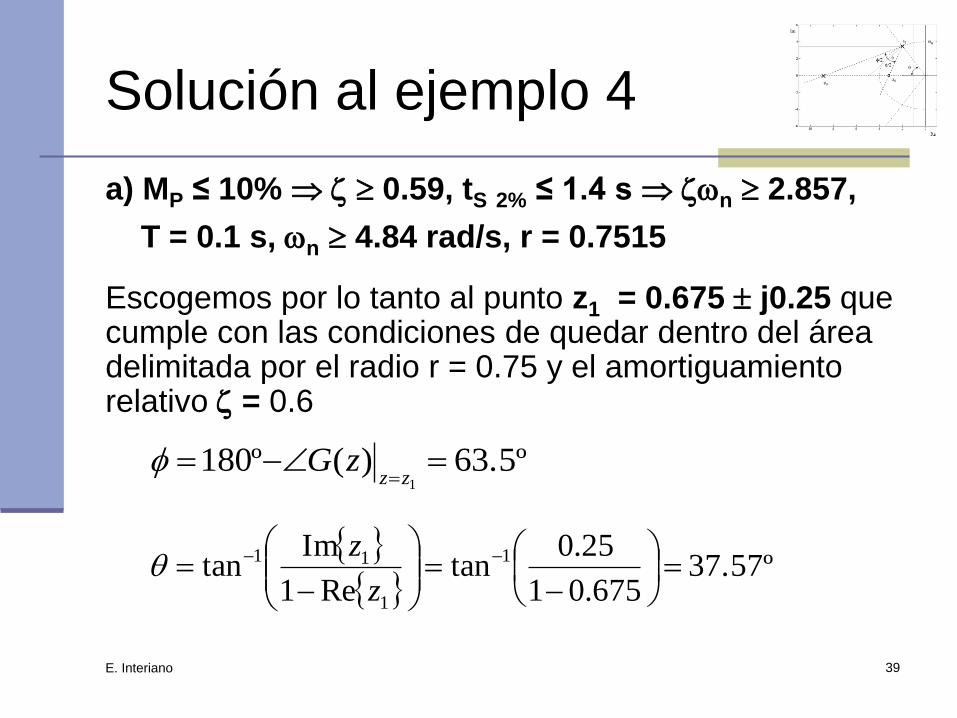
Solución al ejemplo 4
a) MP ≤ 10% 0.59, tS 2% ≤ 1.4 s n 2.857,
T = 0.1 s, n 4.84 rad/s, r = 0.7515
Escogemos por lo tanto al punto z1 = 0.675 j0.25 que cumple con las condiciones de quedar dentro del área delimitada por el radio r = 0.75 y el amortiguamiento relativo = 0.6
63.5º)(º1801
zz
zG
37.57º675.01
25.0tan
Re1
Imtan 1
1
11
z
z

E. Interiano 41
Solución al ejemplo 4:
compensador de adelantoCalculamos un compensador de adelanto por el método
de la bisectriz.
0.7325
2
5.6357.37cos
2
5.6357.37cos
j0.25 0.67511
2cos
2cos
11 10
zz
0.3714
2
5.6357.37cos
2
5.6357.37cos
j0.25 0.67511
2cos
2cos
11 10
zp
20.73
)(3714.0
7325.0
1
1
zz
O
C
zGz
zk
3714.0
7325.073.02)(
z
zzKlead
E. Interiano 42
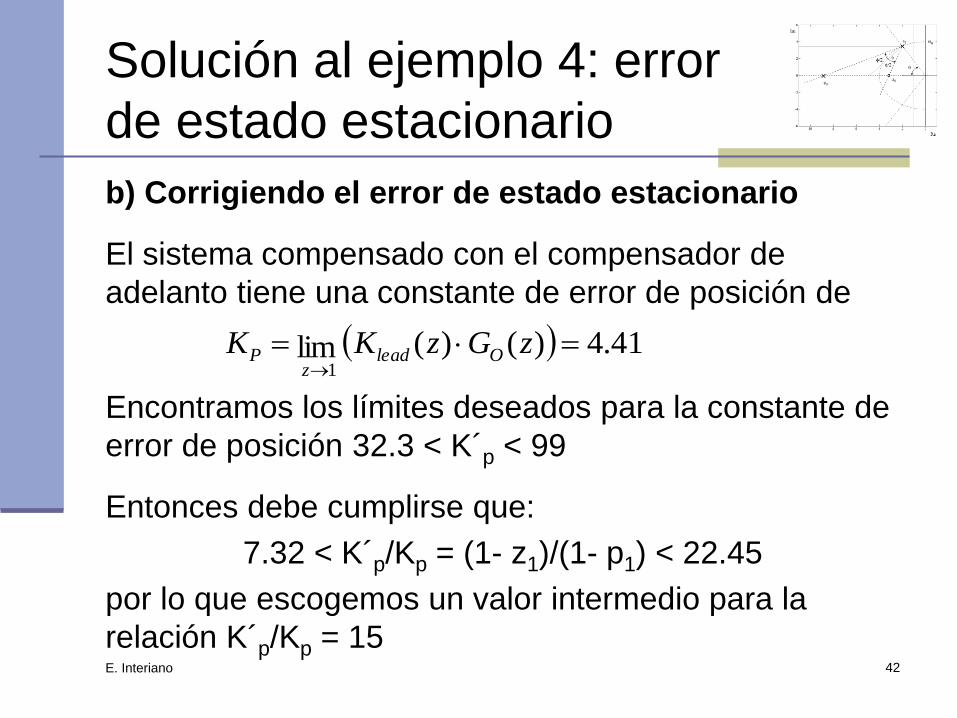
Solución al ejemplo 4: error
de estado estacionario
b) Corrigiendo el error de estado estacionario
El sistema compensado con el compensador de
adelanto tiene una constante de error de posición de
Encontramos los límites deseados para la constante de
error de posición 32.3 < K´p < 99
Entonces debe cumplirse que:
7.32 < K´p/Kp = (1- z1)/(1- p1) < 22.45
por lo que escogemos un valor intermedio para la
relación K´p/Kp = 15
41.4)()(lim1
zGzKK Oleadz
P

E. Interiano 43
Solución al ejemplo 4:
compensador de atrasoEl compensador de atraso con K´p/Kp = 15
Como el sistema es tipo 0, hacemos que el cero z1 se
encuentre al la derecha del polo dominante en 0.9048
por lo que escogemos z1 = 0.92; con lo que el polo p1
debe quedar en:
p1 = 1+(0.92-1)/(15) = 0.9947 9947.0
92.0)(
z
zzK lag
111
1
PP KK
zp

E. Interiano 44
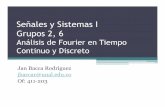
Solución al ejemplo 4:
lugar de las raíces
Lugar de las raíces
compensado por el
método de la bisectriz,
para el punto z1
escogido; además con
compensador de
atraso para corregir el
error de estado
estacionario.
Se muestra la zona ,
para las condiciones,
de la parte a) 0.59
y n 2.857; r = 0.75

E. Interiano 45
Solución al ejemplo 4: Respuesta
ante un escalón para el sistema
compensado
)9947.0(
)92.0(
0.3714)(
0.7325)(20.73)(
z
z
z
zzK
E. Interiano 46
Análisis de resultados para el
ejemplo 4
Se puede observar en la figura anterior, que se cumplen los valores pedidos para el tiempo de estabilización y el error de estado estacionario. Únicamente el sobreimpulso está ligeramente mayor que el 10% pedido.
El problema principal parece ser que el tiempo de muestreo TS = 0.1 s es muy grande respecto a la constante de tiempo dominante del sistema 0.35s, esto afecta al sobreimpulso pues la salida tiene cambios muy grandes en cada periodo de muestreo. Se puede reducir el sobreimpulso, en este caso, reduciendo el tiempo de muestreo a TS ≤ 0.035 s.

Solución con T =0.035s
z2 = 0.8844 + 0.1104i (z1^(T2/T1))
gamma1 = 116.5129°
fi2 = 56.3874°
Gz2 = 0.00059152 (z+0.9656)
------------------------------- , T2 = 0.035
(z-0.9324) (z-0.9656)
theta = 43.6849°
z0 = 0.8967
p0 = 0.7527
kc = 23.2666
Probar cancelación de polo y PI con canc. polo

E. Interiano 48
Ejemplo 5: Compensador de
filtro de ranura (notch filter)
Encuentre para el sistema en tiempo discreto, con la
planta G(z), con un tiempo de muestreo T = 0.05 s, el
compensador en tiempo discreto, que haga que la
respuesta de lazo cerrado ante un escalón tenga
las características dinámicas y estáticas siguientes:
Un sobreimpulso MP ≤ 10%
Un tiempo de estabilización del 2% tS ≤ 3 s
Un error de estado estacionario de cero
0.9231) + 1.885z - (z
0.9737)+(z 0.019)(
2zG

E. Interiano 49
Solución al ejemplo 5
a) MP ≤ 10% 0.59, tS 2% ≤ 3 s n 1.33,
T = 0.05 s, n 2.26 rad/s, r = 0.9355
Encontramos que el punto s1 = -1.34 ± j1.8 es la intersección de las condiciones dadas. Transformamos al plano z y obtenemos el punto z1 = 0.9314 j0.0841. Escogemos entonces el punto z1 = 0.91 j0.08 que cumple con las condiciones de quedar dentro del área delimitada por el radio r = 0.9355 y el amortiguamiento relativo = 0.6.
El ángulo total a agregar por los dos polos es: = ±180º +
177.57º
º43.1820.9231) + 1.885z - (z)(º1802
:punto mismo el en polos dos los Con .)(ˆ donde
1
2
110
1
zG
zG
Op
zzO
E. Interiano 50
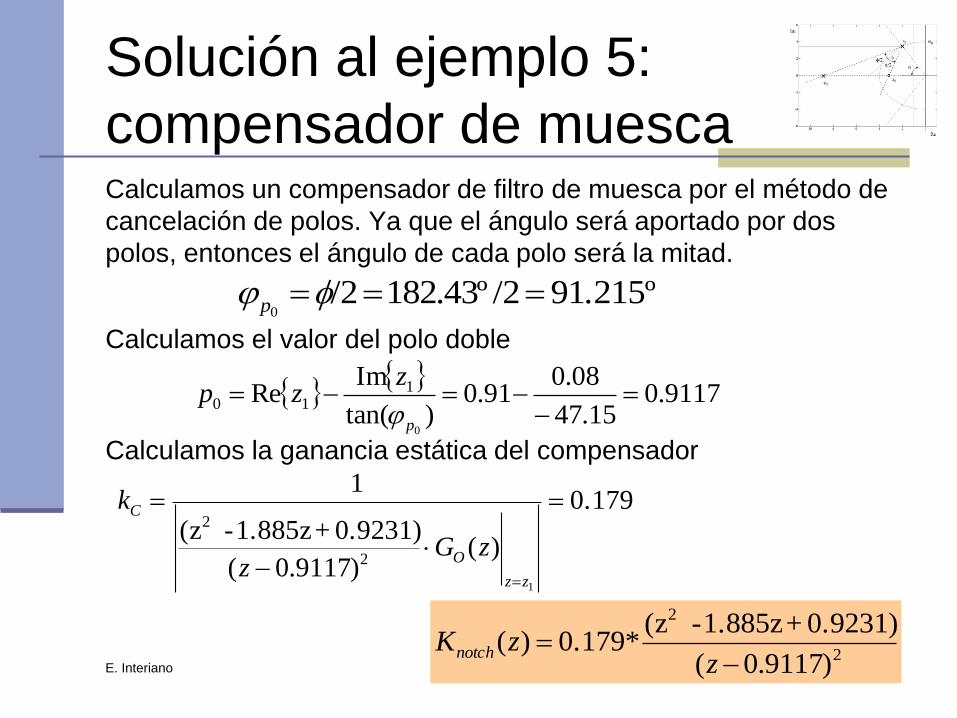
Solución al ejemplo 5:
compensador de muescaCalculamos un compensador de filtro de muesca por el método de
cancelación de polos. Ya que el ángulo será aportado por dos
polos, entonces el ángulo de cada polo será la mitad.
Calculamos el valor del polo doble
Calculamos la ganancia estática del compensador
0.179
)()9117.0(
0.9231) + 1.885z - (z
1
1
2
2
zz
O
C
zGz
k
2
2
)9117.0(
0.9231) + 1.885z - (z*0.179)(
zzKnotch
9117.015.47
08.091.0
)tan(
ImRe
0
110
p
zzp
.215º91/2º43.821/20
p

E. Interiano 51
Solución al ejemplo 5: error
de estado estacionario
b) Corrigiendo el error de estado estacionario
Para que el sistema tenga error de estado estacionario
cero ante un escalón, la transmitancia equivalente
directa GE(z) debe ser tipo 1; o sea, debe tener un
factor (z-1) en el denominador. Como puede
observarse en el producto Knotch(z)*Go(z), esto no
ocurre por lo que debemos agregar un PI discreto, cuyo
cero se escoge a la derecha del polo en 0.9117, no
muy cerca de 1.
1
94.0
z
zKPI
E. Interiano 52
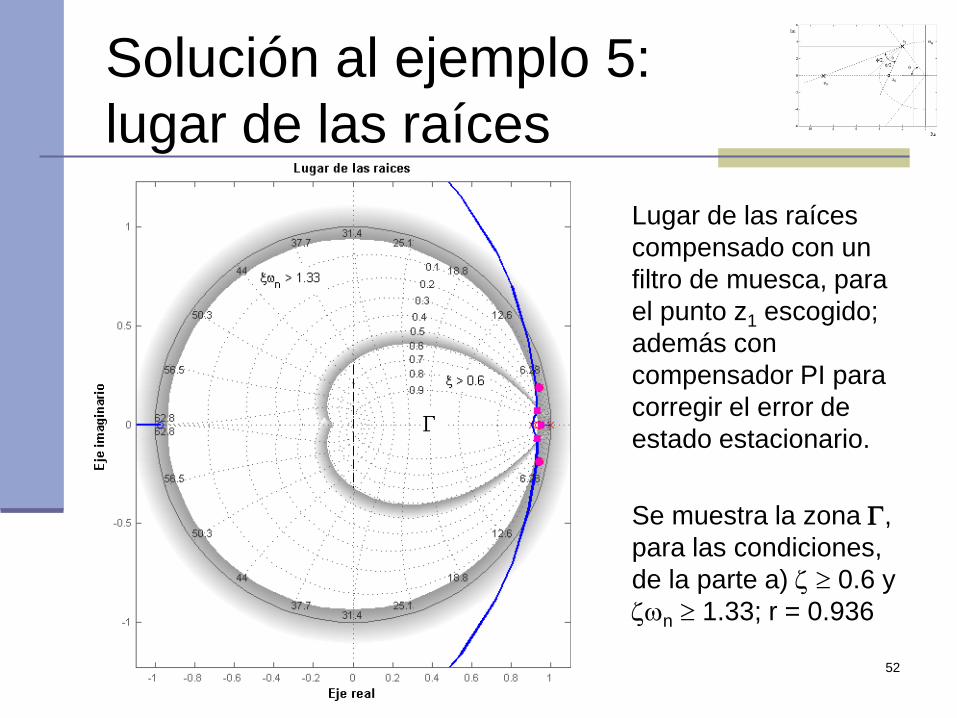
Solución al ejemplo 5:
lugar de las raíces
Lugar de las raíces
compensado con un
filtro de muesca, para
el punto z1 escogido;
además con
compensador PI para
corregir el error de
estado estacionario.
Se muestra la zona ,
para las condiciones,
de la parte a) 0.6 y
n 1.33; r = 0.936
E. Interiano 53
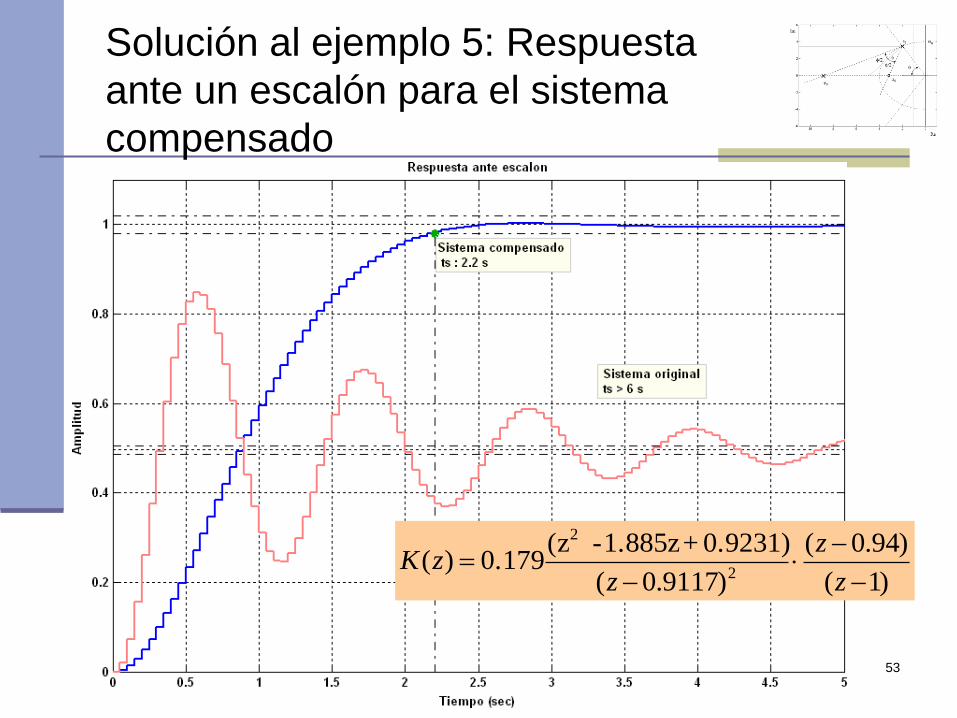
Solución al ejemplo 5: Respuesta
ante un escalón para el sistema
compensado
)1(
)94.0(
)9117.0(
0.9231) + 1.885z - (z0.179)(
2
2
z
z
zzK

E. Interiano 54
Análisis de resultados para
el ejemplo 5 Se puede observar en la figura anterior, que se
cumplen los valores pedidos para el sobreimpulso, eltiempo de estabilización y el error de estadoestacionario.
El periodo de muestreo T = 0.05s parece ser muypequeño para el sistema. Existen aproximadamente22 muestreos en un periodo de oscilación. Se puedehacer T = 0.1s con toda confianza.
También, el compensador resultante es de orden 3,el cual es bastante complejo y su implementacióndigital requerirá de más cálculos.
Es posible realizar un compensador de filtro demuesca, el cual con la selección adecuada de lospolos puede también corregir el error de estadoestacionario y hacerlo cero.

Resumen (1)
Se emplea una estrategia que evita al máximo los efectos secundarios de cada parte sobre las otras
El procedimiento debe tomar en cuenta que el modelo es inexacto y que las especificaciones no pueden ser tampoco exactas y recurrir a la iteración
Se debe garantizar que el polo de lazo cerrado del compensador de atraso no vuelva muy lento al sistema ubicando el cero adecuadamente, dependiendo del tipo de sistema.
Resumen (2)
El procedimiento debe tomar en cuenta la
realimentación (especialmente el valor
estático de H(s), cuando s 0)
Cuando el sensor tiene ganancia o
atenuación, es necesario usar un
precompensador estático F acompañando al
compensador de atraso.

E. Interiano 57
Ejercicios
1) Resuelva el ejemplo 2 por el método de ubicación del cero enRe{z1}
2) Resuelva el ejemplo 2 por el método de ubicación de cero enel polo +0.8187
3) Compense error de estado estacionario del ejemplo 2compensado en adelanto, con un compensador PI cancelandoel polo
4) Calcule el ejemplo 2 por el método de la bisectriz, con untiempo de muestreo TS = 0.035 s
5) Escriba el método y las ecuaciones para calcular elcompensador de atraso para un sistema en tiempo discretotipo 1
6) Realice el compensador del filtro de muesca para el ejemplo5, de tal forma que el error de estado estacionario seacorregido sin requerir de otro compensador PI adicional

Referencias
Ogata, Katsuhiko. „Ingeniería de Control
Moderna“, Pearson, Prentice Hall, 2003, 4ª
Ed., Madrid.
Dorf, Richard, Bishop Robert. „Sistemas de
control moderno“, 10ª Ed., Prentice Hall,
2005, España.