Control activo de Un Sistema de Suspensión Magnética
10
Caos Conciencia 7: 12 21 Beltrán et al
description
Control activo de Un Sistema de Suspensión Magnética
Transcript of Control activo de Un Sistema de Suspensión Magnética

Caos Conciencia 7: 12 21 Beltrán et al
12
CONTROL ACTIVO DE UN SISTEMA DE SUSPENSIÓN MAGNÉTICADIFERENCIALMENTE PLANO
Este artículo aborda el problema de control para tareas de seguimiento de
trayectorias de referencia para la posición de un objeto en un sistema de suspensión
magnética. Se propone un esquema de control que aprovecha la propiedad
estructural de la planitud diferencial del sistema, como una solución alternativa
a este problema. Se considera un modelo matemático no lineal del sistema de
suspensión magnética que incluye la dinámica del circuito electromagnético y
el voltaje aplicado en las terminales del circuito como variable de control. El
desempeño del controlador se evalúa para dos tareas de seguimiento trayectorias
de referencia. La primera considera el problema de transferir el objeto desde una
posición de equilibrio nominal deseada a otra. La segunda aborda el seguimiento
de una trayectoria sinusoidal para la posición del objeto.Palabras clave: Control No Lineal_ Planitud Diferencial_ Suspensión Magnética.
Información del artículo
Enviado: 4 de febrero de 2013
Aceptado: 16 de julio de 2013
Disponible en línea: 30 de octubre de
2013.
Palabras clave: Control No Lineal_
Planitud Diferencial_ Suspensión
Magnética.
El control activo de sistemas de suspensión magnéticaha ganado gran interés en la comunidad científica,debido a la enorme diversidad de aplicacionesprácticas que este tipo de sistemas ofrece para mejorarlos índices de desempeño relacionados con eficienciaenergética, mantenimiento y sustentabilidad. Algunasde sus aplicaciones se pueden encontrar enchumaceras para maquinaria rotatoria, sistemas detransporte terrestre, suspensiones de vehículos,sistemas de aislamiento de vibración, máquinas
herramientas automáticas, entre otras (véase Yetendjeet.al, 2010, ElSinawi & Emam, 2011 , Boniventoet.al, 2005, Feemster et.al, 2006, y las referenciasque ahí se incluyen).
Actualmente, existen varias propuestas de esquemasde control para sistemas de suspensión magnética,las cuales abordan principalmente el problema deregulación de posición alrededor de un punto deoperación nominal constante. En (Yang, Lee &
RESUMEN
INTRODUCCIÓN
Francisco Beltrán Carbajal, Eusebio Guzmán Serrano, Benjamín Vázquez GonzálezUniversidad Autónoma Metropolitana, Unidad Azcapotzalco, Departamento de Energía
México D.F., Méxicoe-mail: {fbeltran,gse,bvg}@correo.azc.uam.mx
Jesús Rodolfo Salas OlacUniversidad Politécnica de la Zona Metropolitana de Guadalajara
Tlajomulco de Zúñiga, Jalisco, Méxicoe.mail: [email protected]
Antonio Valderrábano GonzálezUniversidad Panamericana, Campus Guadalajara, Área de Ingeniería Mecatrónica
Zapopan, Jalisco, Mé[email protected]

Control Activo
1 3
Kwon, 2010) se propone un equipo de modeladoque obtiene cada punto de equilibrio en un sistemade levitación magnética automáticamente midiendola fuerza magnética ejercida sobre el objetosuspendido, la corriente del núcleo del electroimány la distancia entre el objeto suspendido y elelectroimán. En (Yang et.al, 2008), se ilustra uncontrolador adaptativo robusto por retroalimentaciónde la salida para el seguimiento de trayectorias deun sistema de levitación magnética con unamplificador de retroalimentación de corriente. Eneste caso el sistema se rige por una ecuacióndiferencial no lineal de segundo orden con una solaentrada y una sola salida. En ese trabajo sólo lamedición de la posición se requiere para laimplementación del control. Un sistema de controlproporcional-integral-derivativo adaptativo para elcontrol de posición de una esfera metálica en unsistema de levitación magnética fue propuesto en(Lin,Lin & Chen, 2011 ). El sistema de control constade un controlador PID adaptativo y un controladorde compensación difuso. Feemster, Fang & Dawson(2006) desarrollaron una estrategia de control deposición para un sistema de levitación magnéticaoperando ante la presencia de un disturbio periódico.El controlador propuesto utiliza una fuerza de entradade control saturado en conjunto con un estimadorde disturbio para regular asintóticamente la masadel objeto levitado en una posición deseada.Deshpande & Badrilal (2010) proponen un sistemade levitación magnética en el cual la posición delobjeto levitado se obtiene sensando el cambio deinductancia entre el objeto levitado y el electroimán.Un diseño de un sistema de control fue propuestopor Suster & Jadvloská (2012). En este caso laposición de la bola es controlada por la corrienteeléctrica que alimenta al electroimán y por unatrayectoria de referencia la cual sirve para linealizarel sistema. Dos métodos para generar trayectoriasen un sistema de levitación magnética en la presenciade restricciones fueron propuestos por Suryawan,Doná & Seron (2010). Los métodos están basadosen el concepto de planitud diferencial yparametrización spline de cada señal. El primer
método utiliza el modelo no lineal de la planta, lacual gira a lo largo del sistema plano. El segundométodo se basa en una versión linealizada del modelode la planta alrededor de un punto de operación. Enambos casos la corriente del núcleo es utilizadacomo la variable de control. En este artículo seaborda el problema de control para tareas deseguimiento de trayectorias de referencia deseadasvariantes en el tiempo para la posición de un objetometálico en un sistema de suspensión magnéticadiferencialmente plano. Se propone un esquema decontrol basado en la propiedad estructural de laplanitud diferencial del sistema como una alternativade solución. En nuestro estudio consideramos unmodelo matemático no lineal del sistema desuspensión magnética que incluye la dinámica delcircuito electromagnético y el voltaje que se aplicaa las terminales de dicho circuito como variable decontrol. Se incluyen algunos resultados en simulaciónpara mostrar el desempeño efectivo del esquema decontrol propuesto. Se presentan dos casos para tareasde seguimiento de trayectorias de referencia. Elprimero considera el problema de transferir el objetodesde una posición de equilibrio nominal deseadaa otra. El segundo aborda el seguimiento de unatrayectoria sinusoidal para la posición del objeto.
SISTEMA DE SUSPENSIÓN MAGNÉTICA
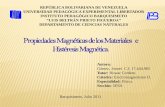
Considérese el diagrama esquemático del sistemade suspensión magnética que se muestra en la Fig.1 (a), el cual permite mantener suspendido un objetode material ferromagnético de masa m, mediante laaplicación de una fuerza de atracción electromagnéticafm inducida por la corriente eléctrica i. Aquí, y=xdenota la posición del objeto, la cual se mide desdeel electroimán, v(t) es el voltaje que se aplica alcircuito electromagnético, el cual actúa como variablede control, y L y R son la inductancia y la resistenciadel electroimán, respectivamente. La Fig. 1 (b)muestra el modelo eléctrico del sistema. El sistemade suspensión consiste de dos subsistemas: eléctricoy electromecánico.

Caos Conciencia 7: 12 21 Beltrán et al
14
SUBSISTEMA ELÉCTRICO
El modelo eléctrico se puede obtener sustituyendoel electroimán por una resistencia en serie con unainductancia que depende de la posición del objeto(Khalil, 2002),
donde L1 es la inductancia sin el objeto, L0 es elincremento de la inductancia con el objeto suspendidoy x0 es la posición de referencia. Podemos obtenerla ecuación diferencial que gobierna la corriente iusando la ley de Kirchoff:
Se puede simplificar el análisis asumiendo quecuando el sistema está correctamente diseñado, elobjeto permanecera cercano a su posición deequilibrio, es decir, x=x0. Esto significa que L(x) sepuede aproximar como L1+L0. También podemossuponer que la inductancia del núcleo, L1, es muchomás grande que la contribución inductiva del objeto
FFiigguurraa 11 .. Diagrama esquemático de un sistema de suspensión magnética
L0, por lo tanto se obtiene la ecuación simplificada
Subsistema electromecánico
La fuerza electromagnética Fm inducida por lacorriente i que actúa sobre el objeto se puede expresarcomo (Khalil, 2002)
donde a es una constante que generalmente sedetermina experimentalmente y km es la constantede la fuerza electromagnética dada por
donde m es la masa del objeto, g es la constante dela aceleración de la gravedad e I0 es la corrienteeléctrica necesaria para mantener el objeto en la
(3)
(1 )
(2)
(4)
(5)
con L≈L1.

Control Activo
1 5
posición deseada.La fuerza total externa sobre elobjeto suspendido está dada por
donde Fg es la fuerza debida a la gravedad. Entonces,aplicando la segunda ley de Newton, se obtiene laecuación de movimiento
Representación en variables de estado
Definiendo como variables de estado a la posicióny velocidad de la esfera y a la corriente eléctrica como
se obtiene el modelo matemático del sistema enespacio de estados
(6)
(7)
Los puntos de equilibrio del sistema de suspensiónmagnética, en términos de alguna posición deseadaX para la esfera, se describen como
CONTROL BASADO EN PLANITUDDIFERENCIAL
El sistema de suspensión magnética exhibe lapropiedad estructural de la planitud diferencial, conla salida plana dada por la posición de la esfera y=x1. Esto significa que las variables de estado y decontrol se pueden expresar en términos de la saliday, y de un número finito de sus derivadas (Fliesset.al 1 993). Para esto, obtenemos las derivadas conrespecto del tiempo hasta de tercer orden de la salidaplana y = x1,(ecuación 10).De esta expresión seobtiene la siguiente parametrización diferencial delsistema,(ecuación 11 ).
(8)
(9)
(10)
(11 )

Caos Conciencia 7: 12 21 Beltrán et al
16
Por consiguiente, la salida plana y satisface lasiguiente ecuación diferencial entrada-salida:
donde
y
A partir de esta expresión, proponemos el siguientecontrolador basado en planitud diferencial, paratareas de seguimiento de trayectorias de referenciadeseada para la posición de la esfera y*(t):
con
El uso de este controlador conduce a la siguientedinámica en lazo cerrado para el error de seguimientoe = y - y*(t):
Entonces, seleccionado las ganancias del controladorαi, i=0,…,3, para que el polinomio característicoasociado a la ecuación diferencial homogénea (14)sea un polinomio Hurwitz (estable), se garantizaque la dinámica del error de seguimiento seaglobalmente asintóticamente estable.
RESULTADOS EN SIMULACIÓN
Algunas simulaciones numéricas fueron realizadasen un sistema de suspensión magnética caracterizadopor el conjunto de parámetros de la Tabla 1 (Yetendjenet.al. 2010), (Quanser Inc. 2006).
Los parámetros de diseño del controlador fueronseleccionados para tener el siguiente polinomiocaracterístico de tercer grado para la dinámica delerror de seguimiento en lazo cerrado:
con p1 = ωn = 20 rad/s y ζ= 0.7071 .
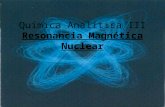
En las Figs. 2 a 5 se muestra el desempeño eficientedel controlador basado en planitud diferencial parael seguimiento de una trayectoria de referencia quepermite mantener suspendida la esfera alrededor dela posición de equilibrio ӯ1 para t ≤ T1 , yposteriormente transferir de manera suave la esferaa la posición de equilibrio ӯ2, para t ≥ T2. Laconvergencia asintótica del error de seguimientohacia cero se manifiesta en la Fig. 3 . Además, lasFigs. 5 y 6 exponen la utilidad de la planificaciónde trayectorias en el diseño e implementación delcontrol, para evitar picos en las señales eléctricasdel voltaje de control y, como una consecuencia, dela corriente, así como la saturación del actuador. Latrayectoria planificada para esta tarea de control sedescribe por,(ecuación 15).
(1 2)
(1 3)
(14)
TTaabbllaa 11 : Parámetros del Sistema de Levitación Magnética
(1 5)

Control Activo
17
donde ӯ1= 0.01 m y ӯ2 = 0.005 m, T1 = 2 s, T2 = 4s,ψ(t, T1 , T2) = 0 es un polinomio de interpolaciónde Bézier, con ψ(t, T1, T2) = 0 y ψ(T2, T1, T2) = 1 ,dado por (ecuación 16).
FFiigguurraa 22.. Respuesta en lazo cerrado de la posición de la
esfera para la trayectoria (1 5)
FFiigguurraa 33 .. Respuesta en lazo cerrado del error de
seguimiento de la trayectoria (1 5)
Las Figs. 6 a 8 presentan el desempeño delcontrolador cuando el voltaje de control escontaminado con ruido blanco con desviaciónestándar de 0.1 , y, además, las señales de posición,velocidad y aceleración de la esfera utilizadas en laimplementación del controlador también soncontagiadas con ruido blanco con desviación estándarde 0.01 . Estas señales sucias que buscan deteriorarla efectividad del controlador se muestran en la Figs.9 a 12. En esta situación, el error en estado
FFiigguurraa 44. Respuesta en lazo cerrado de la corriente
eléctrica para la trayectoria (1 5)
FFiigguurraa 55 .. Voltaje de control aplicado al sistema para la
trayectoria (1 5)
(1 6)
con r1 = 252, r2 = 1050, r3 = 1800, r4 = 1575, r5 = 700, r6 = 126.

Caos Conciencia 7: 12 21 Beltrán et al
18
estacionario exhibe una desviación de menos de 0.1mm de la trayectoria de referencia planificada, lacual se puede considerar prácticamente satisfactoria.Sin embargo, en caso de que este error se encuentrefuera del rango especificado para la operación delsistema, se recomienda el uso de filtros en la síntesise implementación del esquema de control
FFiigguurraa 66.. Respuesta en lazo cerrado de la posición de la
esfera para la trayectoria (1 5) con contaminación con ruido
FFiigguurraa 77.. Respuesta en lazo cerrado del error de
seguimiento de la trayectoria (1 5) con contaminación
con ruido
FFiigguurraa 99.. Señal de la posición de la esfera con
contaminación con ruido, utilizada en la implementación
del controlador para la trayectoria (1 5)
FFiigguurraa 11 00.. Señal de velocidad de la esfera con
contaminación con ruido, utilizada en la implementación
del controlador para la trayectoria (1 5)
FFiigguurraa 88 .. Respuesta en lazo cerrado de la corriente eléctrica
para la trayectoria (1 5) con contaminación con ruido
FFiigguurraa 11 11 . Señal de aceleración de la esfera con
contaminación con ruido, utilizada en la implementación
del controlador para la trayectoria (1 5)

Control Activo
19
En las Figs. 1 3 a 16 se describe el desempeño delcontrolador para el seguimiento de la trayectoria dereferencia sinusoidal
donde ӯ1=0.01 m, A=0.005 m y ω =5 rad/s. Severifica el seguimiento satisfactorio de esta trayectoriavariante en el tiempo para la posición de la esfera(e→0 ). De manera similar, las Figs. 1 5 y 16 muestranperfiles suaves del voltaje de control y de la corrienteeléctrica.
FFiigguurraa 11 22.. Voltaje de control con contaminación con
ruido aplicado al sistema para la trayectoria (1 5)
(1 7)
Además, el desempeño del controlador para elseguimiento de la trayectoria (17) fue evaluadocuando las señales de posición, velocidad yaceleración del objeto suspendido, así como el voltajede control, son contaminados con ruido blanco conlas mismas características del caso anterior. Losresultados se muestran en las Figs. 1 7 a 23. En estasituación, también podemos decir que el desempeñodel controlador es satisfactorio, con un error enestado estacionario menor a 0.1 mm.
FFiigguurraa 11 55. Respuesta en lazo cerrado de la corriente
eléctrica para la trayectoria (17)
FFiigguurraa 11 33 .. Respuesta en lazo cerrado de la posición de
la esfera para la trayectoria (17)
FFiigguurraa 11 44.. Respuesta en lazo cerrado del error de
seguimiento de la trayectoria (17)
FFiigguurraa 11 66.. Voltaje de control aplicado al sistema para la
trayectoria (17)

Caos Conciencia 7: 12 21 Beltrán et al
20
FFiigguurraa 11 77 .. Respuesta en lazo cerrado de la posición de
la esfera para la trayectoria (17) con contaminación con
ruido
FFiigguurraa 11 88 .. Respuesta en lazo cerrado del error de
seguimiento de la trayectoria (17) con contaminación
con ruido
FFiigguurraa 11 99 .. Respuesta en lazo cerrado de la corriente
eléctrica para la trayectoria (1 8) con contaminación con
ruido
FFiigguurraa 2200. Señal de la posición de la esfera con
contaminación con ruido, utilizada en la implementación
del controlador para la trayectoria (17)
FFiigguurraa 2211 .. Señal de la velocidad de la esfera con
contaminación con ruido, utilizada en la implementación
del controlador para la trayectoria (17)
FFiigguurraa 2222.. Señal de la aceleración de la esfera con
contaminación con ruido, utilizada en la implementación
del controlador para la trayectoria (17)
FFiigguurraa 2233 .. Voltaje de control con contaminación con
ruido aplicado al sistema para la trayectoria (17)

Control Activo
21
CONCLUSIONES
En este artículo se propone una alternativa de soluciónal problema de control de un sistema de suspensiónmagnética tradicional. Esta propuesta se centró enexplotar de manera importante la propiedad estructuralde la planitud diferencial del sistema, en el diseñode un esquema de control que permite realizar tareasde seguimiento de trayectorias de referencia deseadasvariantes en el tiempo para la posición del objetometálico de dicho sistema. En el análisis se haincorporado la dinámica del circuito electromagnético,y como variable de control al voltaje aplicado enlas terminales de dicho circuito. Los resultados ensimulación muestran un desempeño eficiente delcontrolador propuesto, así como la utilizad de laplanificación de trayectorias en el diseño eimplementación del control, para evitar picos en lasseñales eléctricas y la saturación del actuador,representando una opción a los controladores quesólo abordan el problema de regulación del objetosuspendido alrededor de puntos de equilibrio deinterés. Futuros trabajos estarán orientados a lavalidación experimental y al análisis de la robustezdel controlador propuesto, con respecto aincertidumbres paramétricas, dinámicas no modeladase influencias externas no conocidas.
REFERENCIAS
Bonivento, C., Gentili, L., and Marconi, L., "BalancedRobust Regulation of a Magnetic Levitation System",IEEE Transactions on Control Systems Technology,Vol. 1 3, No. 6, pp. 1 036-1044, 2005.Deshpande, M. and Badrilal, M., “Sensorless Controlof Magnetic Levitation Using Sliding ModeController” International Conference on ComputerApplications and Industrial Electronics, pp. 9-14,Kuala Lumpur, Malaysia, December 5-7, 2010ElSinawi, A.H., and Emam, S., "Dual LQG-PIDControl of a Highly Nonlinear Magnetic LevitationSystem", 4th International Conference on Modeling,Simulation and Applied Optimization, pp. 1 -4, KualaLumpur, Malaysia, April 1 9-21 , 2011 .
Feemster, M.G., Fang, Y., Dawson, D.M., Diciembre2006, “Disturbance Rejection for a MagneticLevitation System,” IEEE/ASME Transactions onmechatronics, Vol. 11 , pp. 709-717.Flies, M., J. Lévine, J. , P., Martín, P. and Rouchon,P., 1 993, “Flatness and detect of nonlinear systems:Introductory theory and examples.” InternationalJournal of control, Vol. 61 (6). pp. 1 327-1 361 .Khalil, H.K., 2002, Nonlinear Systems. New Jersey.Prentice Hall 3rd. pp. 1 -32.Lin, C., Lin, M. and Chen, C., Junio 2011 , “SoPC-Based Adaptive PID Control System Design forMagnetic Levitation System.” IEEE Systems Journal.Vol. 5. No. 2. pp. 278-287.Quanser Inc., 2006, “Magnetic Levitation PlantManual”. Markham: Ontario, Canada.Suryawan, F., Doná, J. and Seron, M., 2010, “Methodsfor trajectory generation in a magnetic-levitationsystem under constraints.” Proceedings of 18thMediterranean Conference on Control & Automation.Marrakech, Morocco. pp. 945-950.Suster, P. and Jadvloska, A., 2012, “Modeling andControl Design of Magnetic Levitation System,”10th IEEE International Symposium on AppliedMachine Intelligence and Informatics (SAMI).Her’any, Slovakia. pp 295-299.Yang, Ji. , Lee, Y. and Kwon, O., 2010, “DevelopmentofMagnetic Force Modeling Equipment for MagneticLevitation System,” Proceedings of 2010 InternationalConference on Control Automation and Systems(ICCAS). Gyeonggi-do, Korea. pp. 29-33.Yang, Z., Kunitoshi, K., Kanae, S. and Wada, K.,2008, “Adaptive Robust Output-Feedback Controlof a Magnetic Levitation System by K-FilterApproach.” IEEE Trans. on Industrial Electronics.Vol. 55. No. 1 . pp. 390-399.Yetendje, A., Seron., M.M., De Doná, J.A andMartínez, J.J. , 2010, "Sensor fault-tolerant controlof a magnetic levitation system", InternationalJournal ofRobust and Nonlinear Control, Vol. 20,pp. 2108-2121 ."