CONCEPTOS FUNDAMENTALES 1.1.-...
13
MECANICA SOLIDOS II Semana 2 CONCEPTOS FUNDAMENTALES 1.1.- INTRODUCCIÓN Se define la Mecánica como la ciencia física que estudia las condiciones de reposo o movimiento de los cuerpos bajo la acción de fuerzas. Por lo general se le divide en 3 partes: Mecánica de los cuerpos rígidos, mecánica de los cuerpos deformables y mecánica de los fluidos. Sin embargo una división más exacta es: Mecánica I) Sólidos. 1. Cuerpos rígidos. Estática.- Equilibrio de los cuerpos bajo la acción de fuerzas exteriores, nos interesa las fuerzas internas, se supone el cuerpo perfectamente rígido. Cinemática.-Movimiento de los cuerpos independientemente de las fuerzas que lo originan Dinámica.-Movimiento de los cuerpos en la que si interesan las fuerzas que la originan 2. Cuerpos deformables.- Tiene que ver con las fuerzas internas y con las deformaciones de los objetos que resultan por la acción de las fuerzas externas sobre ellos II) Fluidos. Nota.- - La Mecánica teórica concierne principalmente al físico, mientras que la Mecánica aplicada le concierne al ingeniero. - La Mecánica Racional está referido al hecho de que la aplicación y los fundamentos de esta es la razón (Resultados finales de investigaciones, los cuales por su puesto, se relacionan con la parte analítica o matemática de la materia). - La Mecánica de Materiales está orientando a entender los conceptos de esfuerzo y deformación, incluyendo el significado de Isotropía y criterios para determinar fallas y fracturas en estructuras. - La Resistencia de Materiales está orientado al cálculo de esfuerzos orientado al diseño estructural. 1.2.- OBJETIVOS DEL CURSO 1.-Mejorar las habilidades del alumno con la finalidad de que este pueda analizar primeramente y posteriormente diseñar los elementos estructurales en general. Con lo cual
Transcript of CONCEPTOS FUNDAMENTALES 1.1.-...

MECANICA SOLIDOS II
Semana 2
CONCEPTOS FUNDAMENTALES
1.1.- INTRODUCCIÓN
Se define la Mecánica como la ciencia física que estudia las condiciones de reposo o
movimiento de los cuerpos bajo la acción de fuerzas. Por lo general se le divide en 3
partes: Mecánica de los cuerpos rígidos, mecánica de los cuerpos deformables y mecánica
de los fluidos. Sin embargo una división más exacta es:
Mecánica
I) Sólidos.
1. Cuerpos rígidos.
Estática.- Equilibrio de los cuerpos bajo la acción de fuerzas
exteriores, nos interesa las fuerzas internas, se supone el cuerpo
perfectamente rígido.
Cinemática.-Movimiento de los cuerpos independientemente de las
fuerzas que lo originan
Dinámica.-Movimiento de los cuerpos en la que si interesan las
fuerzas que la originan
2. Cuerpos deformables.- Tiene que ver con las fuerzas internas y con las
deformaciones de los objetos que resultan por la acción de las fuerzas
externas sobre ellos
II) Fluidos.
Nota.-
- La Mecánica teórica concierne principalmente al físico, mientras que la Mecánica
aplicada le concierne al ingeniero.
- La Mecánica Racional está referido al hecho de que la aplicación y los
fundamentos de esta es la razón (Resultados finales de investigaciones, los cuales
por su puesto, se relacionan con la parte analítica o matemática de la materia).
- La Mecánica de Materiales está orientando a entender los conceptos de esfuerzo y
deformación, incluyendo el significado de Isotropía y criterios para determinar
fallas y fracturas en estructuras.
- La Resistencia de Materiales está orientado al cálculo de esfuerzos orientado al
diseño estructural.
1.2.- OBJETIVOS DEL CURSO
1.-Mejorar las habilidades del alumno con la finalidad de que este pueda analizar
primeramente y posteriormente diseñar los elementos estructurales en general. Con lo cual
el producto final sea Resistente, Rígido (características de deformación) y Estable
(condición en columnas).
2.- Conocer la acción de las fuerzas externas que nos da el conocimiento de las fuerzas
internas o en otras palabras el estudio de la Mecánica de Materiales, requiere un
conocimiento de la forma en que las fuerzas y momentos externos afectan los esfuerzos y
deformaciones que se desarrollan internamente en el material de un miembro que soporta
carga.
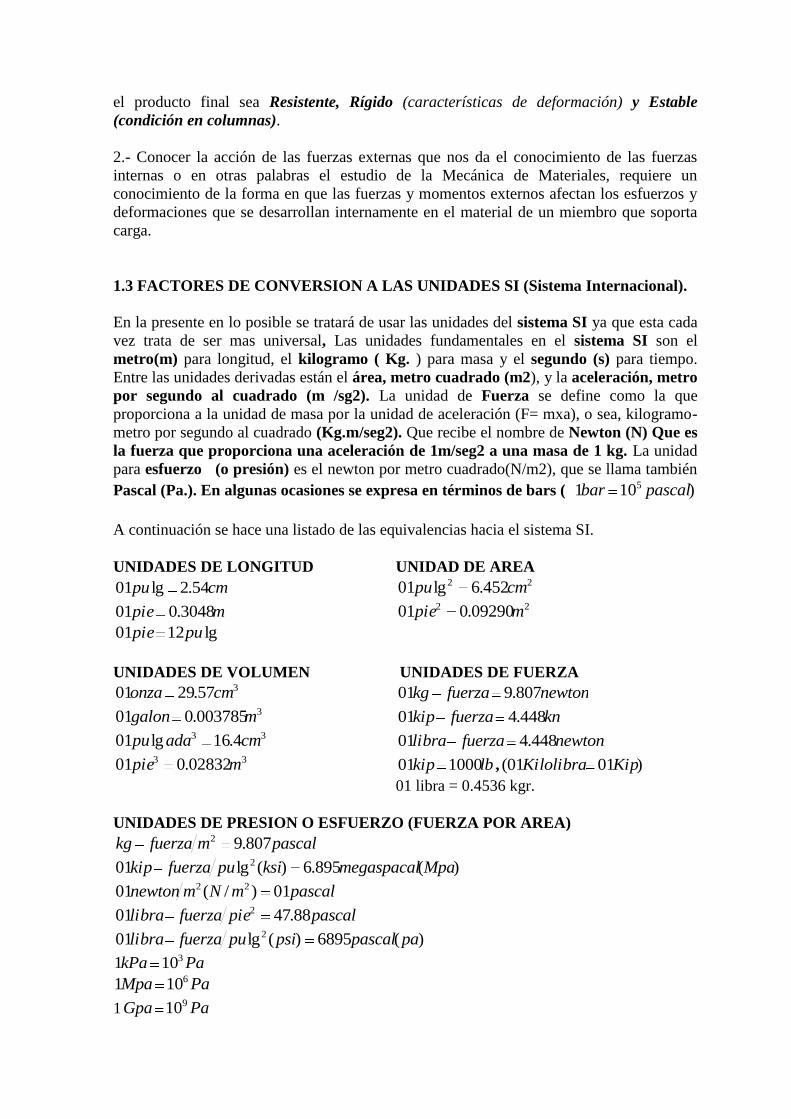
1.3 FACTORES DE CONVERSION A LAS UNIDADES SI (Sistema Internacional).
En la presente en lo posible se tratará de usar las unidades del sistema SI ya que esta cada
vez trata de ser mas universal, Las unidades fundamentales en el sistema SI son el
metro(m) para longitud, el kilogramo ( Kg. ) para masa y el segundo (s) para tiempo.
Entre las unidades derivadas están el área, metro cuadrado (m2), y la aceleración, metro
por segundo al cuadrado (m /sg2). La unidad de Fuerza se define como la que
proporciona a la unidad de masa por la unidad de aceleración (F= mxa), o sea, kilogramo-
metro por segundo al cuadrado (Kg.m/seg2). Que recibe el nombre de Newton (N) Que es
la fuerza que proporciona una aceleración de 1m/seg2 a una masa de 1 kg. La unidad
para esfuerzo (o presión) es el newton por metro cuadrado(N/m2), que se llama también
Pascal (Pa.). En algunas ocasiones se expresa en términos de bars ( )101 5 pascalbar
A continuación se hace una listado de las equivalencias hacia el sistema SI.
UNIDADES DE LONGITUD UNIDAD DE AREA
cmpu 54.2lg01 22 452.6lg01 cmpu
mpie 3048.001 22 09290.001 mpie
lg1201 pupie
UNIDADES DE VOLUMEN UNIDADES DE FUERZA 357.2901 cmonza newtonfuerzakg 807.901
3003785.001 mgalon knfuerzakip 448.401 33 4.16lg01 cmadapu newtonfuerzalibra 448.401
33 02832.001 mpie lbkip 100001 , )0101( KipKilolibra
01 libra = 0.4536 kgr.
UNIDADES DE PRESION O ESFUERZO (FUERZA POR AREA)
pascalmfuerzakg 807.92
)(895.6)(lg01 2 Mpamegaspacalksipufuerzakip
pascalmNmnewton 01)/(01 22
pascalpiefuerzalibra 88.4701 2
)(6895)(lg01 2 papascalpsipufuerzalibra
PakPa 3101
PaMpa 6101
1 PaGpa 910

DENSIDAD
Densidad del concreto = 2400 kg/m3
Densidad del acero = 7850 kg/m3
Densidad de la madera = 1560 kg/m3
1.4 RELACIONES ENTE MASA, FUERZA Y PESO
La fuerza y la masa son magnitudes separadas y diferentes. El peso es una clase especial de
fuerza dirigida al centro del globo terráqueo
La masa se refiere a la cantidad de sustancia que hay en un cuerpo. La fuerza es la acción
de empujar o jalar que se ejerce sobre un cuerpo, ya sea por una fuente externa, o por la
gravedad.
El peso es la fuerza de la atracción gravitacional sobre un cuerpo.
mxaF aFm (Segundo principio de newton)
mxgW gWm
Donde 2/81.9 smg 2/2.32 spiesg
newtonsmkgmxaF 2/.
slugpies
slbaFm
2.
1.5 CONCEPTO DE ESFUERZO
Esfuerzo es la resistencia interna que ofrece un área unitaria del material del que esta
hecho un miembro para una carga aplicada externa
Esfuerzo Normal, Es la componente perpendicular o normal a la sección, se reparte
uniformemente en la totalidad de la sección transversal del miembro, Los esfuerzos pueden
ser de tensión (+) o de compresión (-).
A
F
area
fuerzaEsfuerzo
A
F
A 0
lim
Donde:
F = Es la fuerza perpendicular al área de
la sección
A = Área de la sección
Limitaciones.- El principal requisito es que la deformación de la barra sea uniforme en
todo su volumen, lo que requiere que sea prismática, que las cargas se apliquen en los
centroides de las secciones transversales y que el material sea homogéneo. La segunda
condición para mantener la uniformidad de las deformaciones laterales es que las

propiedades elásticas deben ser iguales en todas las direcciones perpendiculares al eje
longitudinal. Los materiales que son isótropos u orto trópicos cumplen con estas
condiciones
Esfuerzo cortante medio Es La otra componente de la intensidad de fuerza que actúa
paralelamente al plano del área transversal.
A
VEsfuerzo
A
V
A 0
lim
Donde:
A = Representa el área de la sección el elemento cortado.
V = Es la componente de la fuerza paralela a la sección o corte
Es el esfuerzo cortante medio
A diferencia de del esfuerzo normal, el esfuerzo cortante es aproximado. En los casos que
se ilustran los esfuerzos cortantes en realidad no están distribuidos uniformemente en el
área de sección. La cantidad que se evalúa representa un esfuerzo cortante medio.

ksip
kip
lb
kipx
p
lbesfuerzo 30
lg
30
1000
1
lg
3000022
MpamNxm
mmx
mm
N
mm
Newtonesfuerzo 20/1020
)1000(20
2500
50000 26
2
2
22
Equivalencia estatica
1.6 CONCEPTO DE DEFORMACIÓN
Todo miembro que se carga (tracción o compresión) se deforma por la influencia de la
carga aplicada. El resultado será un alargamiento o acortamiento del elemento, la
deformación que también se conoce como deformación unitaria, se obtiene dividiendo la
deformación total entre la longitud original de la barra. La deformación se denota con la
letra griega minúscula épsilon

LiginalLongitudOr
nTotalDeformacionDeformacio
Ejemplo.- Por la acción de una fuerza de tensión se nota que una barra de 15.20m ha
sufrido un alargamiento de 0.024 m, calcular su deformación unitaria.
mmm
m/0016.0
20.15
024.0
La deformación unitaria es adimensional, pero por razones de mantener la definición de
deformación por unidad de longitud del miembro es preferible mantener sus unidades.
LEY DE HOOKE –MODULO DE ELASTICIDAD
Es una propiedad de los materiales y es aplicable con suficiente exactitud a casi todos los
materiales. La relación entre esfuerzo y deformación (en los diagramas esfuerzo-
deformación) se puede decir que es lineal para todos los materiales. Esta idealización
amplia y su generalización aplicable a todos los materiales se conocen como la ley de
hooke simbólicamente, esta ley se puede expresar por la expresión:
E ó E
Que significa simplemente que el esfuerzo es directamente proporcional al de la
deformación, y la constante de proporcionalidad es E. Esta constante e se denomina
Modulo de elasticidad, Modulo elástico o Modulo de Young. Como es adimensional,
E tiene las mismas unidades que el esfuerzo. Suele expresarse en ( kgf/cm2. lbf/plg2,
N/m2 o Mpa}
Gráficamente e se interpreta como la pendiente de una recta que va desde el origen hasta
un punto de posición incierta en un diagrama Esfuerzo-Deformación.

Una material con un valor de E elevado se deformara menos con un esfuerzo dado que uno
con un valor reducido de E. Un término más completo para E seria el módulo de
elasticidad a tensión o compresión, porque se define en función del Esfuerzo normal, sin
embargo, el término “Modulo de Elasticidad”, sin ningún modificador, generalmente se
considera como el Modulo de tensión
Ejemplo:-
Fibra de carbono 27 /102.2 cmkgfxE
Para el acero al carbón y aleado 26 /101.2 cmkgfxE
Para el concreto f’c = 210 Kg. /cm2 25 /1017.2 cmkgfxE
Para la madera 25 /100.1 cmkgfxE
1.7 COEFICIENTE DE POISSON ( )ó
Además de la deformación de los materiales en la dirección de la fuerza aplicada, se puede
observar otra propiedad notable en todos los materiales sólidos o sea, que
perpendicularmente a la fuerza aplicad axial (longitudinal) ocurre expansión o
contracción lateral (transversal).
Es el cociente de la deformación lateral en el elemento a la deformación axial y es una
propiedad del material del que esta hecho el miembro de carga.
Lo
LoLfnaxialDeformacio a

ho
hfhonLateralDeformacio l
a
ledePossoncoeficient
VALORES DEL COEFICIENTE DE POISSON
MATERIAL ó MATERIAL ó
Aluminio 0.25 Madera 0.30
Concreto 0.20 Hule 0.50
Hierro colado 0.27 Roca 0.25
Plastico 0.40
Cobre 0.35 Vidrio 0.20
Acero al carbón y aleado 0.28 Ladrillo 0.25
1.08 LEY DE HOOKE PARA ESFUERZO CORTANTE Y DEFORMACIÓN POR
CORTE
En un elemento de un cuerpo los esfuerzos cortantes se presentan en dos pares que actúan
en planos mutuamente perpendiculares. Cuando solo ocurren estos esfuerzos, se dice
que el elemento esta en estado de corte puro. Dicho sistema de esfuerzos distorsiona un
elemento de un cuerpo elástico en la forma que se ilustra en la figura. Desde luego, esa
distorsión se presenta solo en el caso de un cuerpo isótropo y perfectamente homogéneo,
que tiene propiedades iguales en todas direcciones
Si la atención se limita al estudio de deformaciones pequeñas, y además si el
comportamiento de un elemento se considera solo en un intervalo elástico, se encontró
experimentalmente que existe una relación lineal entre el esfuerzo cortante y el Angulo
(gama). Por consiguiente, si se define como la deformación angular (o por cortante)
matemáticamente la expresión de la ley de hooke para el caso de esfuerzo cortante y
deformación por cortante es
G
Donde:
G = Es una constante de proporcionalidad
llamada Modulo de elasticidad al cortante, a
veces , Modulo de rigidez. Como E, el modulo G
es también una constante de un material dado. Se
mide en las mismas unidades que E.
= Deformación por cortante se mide en radianes
y es una cantidad adimensional (la deformación
angular o por cortante , se puede expresar en
tanto por ciento, igual que
Los diagramas es semejante al de los
diagramas de un ensayo a la tensión el mismo material. El punto de fluencia y el
esfuerzo ultimo al corte. Sin embargo de estos puntos para los esfuerzos cortantes son
generalmente mucho menores que los valores correspondientes al esfuerzo normal.

Las tres constantes elásticas E, v y G no son independientes entre si en el caso de
materiales isótropos.
)1(2 v
EG
Ejemplo.-
Para el concreto 20.0 ; G = 0.42E; algunos autores consideran G = 0.5 E
Para el acero al carbón y aleado 28.0 ; G = 0.39E.
1.09 ESFUERZO EN UN PUNTO
Para poder calcular el rompimiento de una estructura, se tiene que estudiar a partir del
rompimiento en un punto, para que esto suceda es necesario que la intensidad de la fuerza
interna, es decir, el esfuerzo excede un valor caracteristico del material. Esto implica que
debemos refinar nuestra definición de esfuerzo sobre una superficie a esfuerzo en un
punto, sin embargo por un punto pasa un numero infinito de planos ( superficies), se trata
de asignar direcciones a la orientación de la superficie imaginaria y a la fuerza interna
sobre esta superficie e incorporando la descripción de las direcciones como sub indices
de las componentes de esfuerzo , de la misma forma que utilizamos los sub indices x,y,z
para describir las componetes de vectores.
En la figura 1.35 aparece un cuerpo cortado por un plano imaginario cuya normal exterior
sigue la direccion i. sobre el area diferencial iA de esa superficie actua una fuerza
resultante jF es la componente de la fuerza en la dirección j. ij AF / es a su vez una
componente de esfuerzo promedio. Si reducimos iA a cero, obtenemos la definición de
una componente de esfuerzo instantáneo en un punto, indicada por la ecuación.
)(lim0
iA
ijA
Fj
i
Cuando observamos una componente de
esfuerzo, el primer subíndice indica la
orientación de la superficie imaginaria y el
segundo la direccion de la fuerza interna.
En las tres dimensiones, cada uno de los
subíndices i y j, puede referirse a una
dirección x, y o z. En otras palabras, hay
nueve posibles combinaciones de esos dos
subíndices, es necesario notar que para
especificare el esfuerzo en un punto en una
dirección en el espacio es necesario una magnitud y dos direcciones(es decir el esfuerzo es
un tensor de segundo orden). En el plano es necesario de una magnitud y solo de una
dirección (es decir, el esfuerzo sobre una superficie, es un vector). Esto distingue al
esfuerzo de todas las cantidades que conocíamos hasta ahora; en tres dimensiones
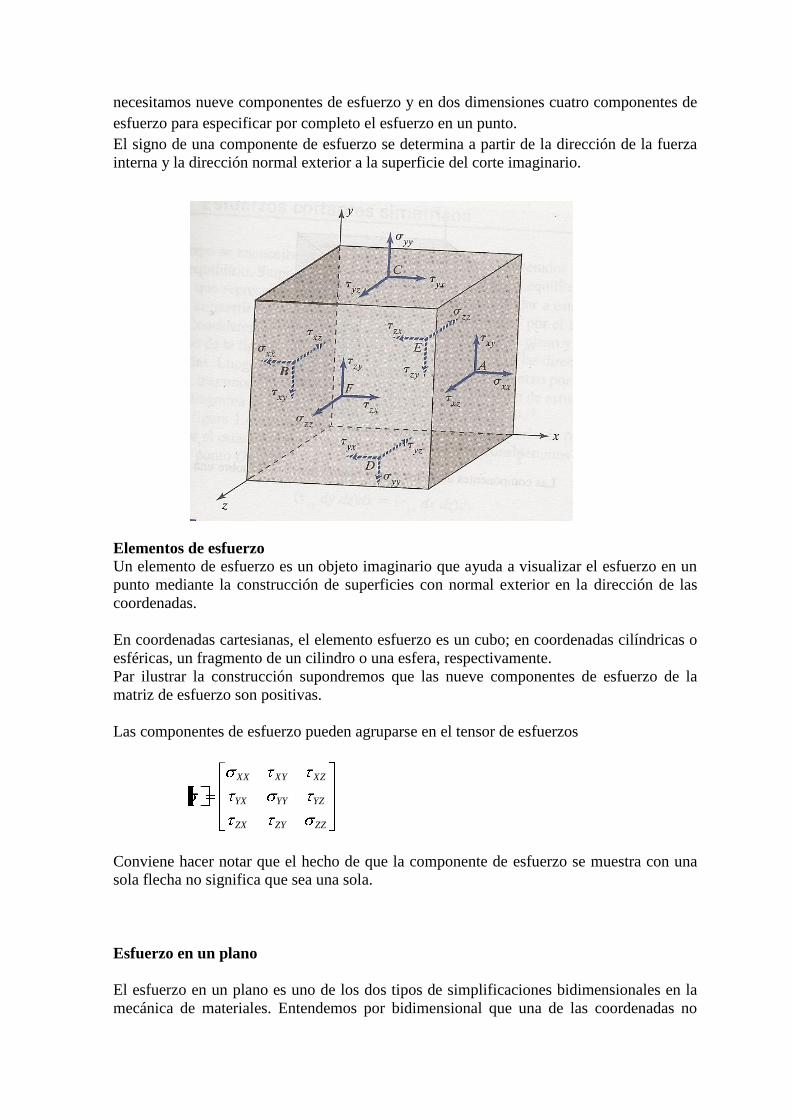
necesitamos nueve componentes de esfuerzo y en dos dimensiones cuatro componentes de
esfuerzo para especificar por completo el esfuerzo en un punto.
El signo de una componente de esfuerzo se determina a partir de la dirección de la fuerza
interna y la dirección normal exterior a la superficie del corte imaginario.
Elementos de esfuerzo
Un elemento de esfuerzo es un objeto imaginario que ayuda a visualizar el esfuerzo en un
punto mediante la construcción de superficies con normal exterior en la dirección de las
coordenadas.
En coordenadas cartesianas, el elemento esfuerzo es un cubo; en coordenadas cilíndricas o
esféricas, un fragmento de un cilindro o una esfera, respectivamente.
Par ilustrar la construcción supondremos que las nueve componentes de esfuerzo de la
matriz de esfuerzo son positivas.
Las componentes de esfuerzo pueden agruparse en el tensor de esfuerzos
ZZZYZX
YZYYYX
XZXYXX
Conviene hacer notar que el hecho de que la componente de esfuerzo se muestra con una
sola flecha no significa que sea una sola.
Esfuerzo en un plano
El esfuerzo en un plano es uno de los dos tipos de simplificaciones bidimensionales en la
mecánica de materiales. Entendemos por bidimensional que una de las coordenadas no

interviene en la descripción del problema, Si tal coordenada fuera z, por ejemplo todos los
esfuerzos con subíndice z, se registran con valor cero:
000
0
0
YYYX
XYXX
Para el caso del estado de esfuerzo plano antes descrito, la resultante de esfuerzos se
supone que pasan por el centroide de la molécula, de tal manera que no se tienen pares ni
torques actuando en ella y suponiendo equilibrio 0zM es decir:
0)()( dxdydzdydxdz zyyz , como dxdydzdv entonces yzzy lo que significa que
el tensor esfuerzo es simétrico
Ejemplo:
Una barra de acero cuyo lado es de 10cm. Y cuya longitud es de 1.5 m. está sometida a una
fuerza de tracción axial de 82000 kg. Determinar la disminución de la dimensión lateral
debido a la carga.
2/101.2 6 cmkgxE
3.0
Solución:

En la dirección axial 2/8201010
82000cmkg
xA
P
Eaxial de Ex
cmcmcmkgx
cmkgaxial /0039.0
2/101.2
2/8206
axial
lateral axial
lateral3.0 0039.03.0 xlateral
00012.0laterla
Laterla
Laterlalaterla
L cmxLateral 0012.01000012.0
FORMA GENERAL DE LA LEY DE HOOKE
En la dirección axial, cuando la carga se aplica según el eje recto del elemento tenemos
que el esfuerzo Ex despejando tenemos E
, en el caso más general una partícula
está sometida a tres tensiones normales perpendiculares ente si yx , y z acompañada
de tres deformaciones yx , y z respectivamente, por lo que superponiendo las
componentes originada por la contracción debida al efecto de Poisson tenemos:
)((1
zyxxE
)((1
zxyyE
)((1
xyzzE
G
xy
xy
G
yz
yz
Gzx
zx
1.10 CLASIFICACION DE LOS MATERIALES
Algunos materiales, notablemente los cristalinos simples, poseen diferentes módulos
elásticos en distintas direcciones en relación con sus planos cristalográficos. Tales
materiales, que poseen propiedades físicas diferentes en distintas direcciones, se
denominan Anisótropos. (Estos materiales no son de estudio, en este curso). La gran

mayoría de los materiales de ingeniería consiste en un gran número de cristales orientados
al azar. Debido a esta orientación aleatoria de los cristales, las propiedades de los
materiales son esencialmente iguales en cualquier dirección (dichos materiales se llaman
Isótropos. En este curso se supone la total homogeneidad y la completa isotropía de
los materiales)
Desde el punto de vista del orden en la que están constituidas las propiedades elásticas de
un material estas adquieren las siguientes denominaciones.
MATERIAL HOMOGÉNEO, que tiene las mismas composición o propiedades elásticas
(E, ) en todos los puntos del cuerpo. Es decir, que sea el mismo en todas las partes del
cuerpo; sin embargo un material homogéneo, no quiere decir que las propiedades
elásticas en un punto específico sean iguales en todas las direcciones. Por ejemplo, el
modulo de elasticidad puede variar para la dirección lateral y axial como en el caso de la
madera.
MATERIAL ISÓTROPO, que tiene las mismas propiedades elásticas (E, ) en todas las
direcciones (direcciones perpendiculares x,y,z) en cada punto del cuerpo. Ejemplo el acero
MATERIALES ANHISOTROPICOS.-No todos los materiales son isótropos. Si sus
propiedades son diferentes en varias direcciones un material se llama anisótropo o, a veces
alotrópico. , Ejemplo el suelo, un caso especial de material anisotropía se presenta cuando
las propiedades en todas las direcciones perpendiculares a la primera son iguales (pero
difieren de las primeras propiedad); en este caso, el material se clasifica como.
ORTOTROPICO.-Muchos materiales compuestos, como los plásticos reforzados con
fibras, tiene un comportamiento orto trópico.
En este texto, todos los ejemplos y problemas están resueltos suponiendo que el material es
elástico lineal, homogéneo e isotrópico, a menos que se especifique lo contrario.