Cinética de partículas.docx
10
Cinética de partículas Mecánica y cinética de partículas: Fuerza: La fuerza es una magnitud vectorial que mide la Intensidad del intercambio de momento lineal entre dos partículas o sistemas de partículas . Fuerza es todo agente capaz de modificar la cantidad de movimiento o la forma de los materiales. Movimiento rectilíneo: El movimiento rectilíneo, es la trayectoria que describe el móvil de una línea recta. Algunos tipos notables de movimiento rectilíneo son los siguientes: Movimiento rectilíneo uniforme: cuando la velocidad es constante. Movimiento rectilíneo uniformemente acelerado: cuando la aceleración es constante. Movimiento armónico simple unidimensional: cuando la aceleración es directamente proporcional a la elongación (distancia a la posición de equilibrio) y está siempre dirigida hacia la posición de equilibrio. El movimiento rectilíneo es uno de los ejemplos más sencillos de movimiento, en el que la velocidad tiene dirección constante (aunque pueda tener en algunos casos aceleración), además hay fuerza y aceleración, estas son siempre paralelas a la velocidad. Esto permite tratar el movimiento rectilíneo mediante ecuaciones escalares, sin necesidad, de usar el formalismo de vectores. Movimiento curvilíneo: Una partícula o cuerpo ejecuta un movimiento curvilíneo, cuando dicha partícula describe una trayectoria que no es recta.
Transcript of Cinética de partículas.docx

Cinética de partículas
Mecánica y cinética de partículas:
Fuerza: La fuerza es una magnitud vectorial que mide la Intensidad del intercambio de momento lineal entre dos partículas o sistemas de partículas. Fuerza es todo agente capaz de modificar la cantidad de movimiento o la forma de los materiales.
Movimiento rectilíneo: El movimiento rectilíneo, es la trayectoria que describe el móvil de una línea recta. Algunos tipos notables de movimiento rectilíneo son los siguientes:
Movimiento rectilíneo uniforme: cuando la velocidad es constante.
Movimiento rectilíneo uniformemente acelerado: cuando la aceleración es constante.
Movimiento armónico simple unidimensional: cuando la aceleración es directamente proporcional a la elongación (distancia a la posición de equilibrio) y está siempre dirigida hacia la posición de equilibrio.
El movimiento rectilíneo es uno de los ejemplos más sencillos de movimiento, en el que la velocidad tiene dirección constante (aunque pueda tener en algunos casos aceleración), además hay fuerza y aceleración, estas son siempre paralelas a la velocidad. Esto permite tratar el movimiento rectilíneo mediante ecuaciones escalares, sin necesidad, de usar el formalismo de vectores.
Movimiento curvilíneo: Una partícula o cuerpo ejecuta un movimiento curvilíneo, cuando dicha partícula describe una trayectoria que no es recta.
En la naturaleza, así como en la técnica es muy corriente encontrarse con movimientos cuyas trayectorias no son líneas rectas, sino curvas. Estos movimientos son llamados curvilíneos, y se encuentran con más frecuencia que los rectilíneos. Por trayectorias curvas se mueven en el espacio cósmico los planetas, los satélites y en la Tierra se mueven así todos los medios de transporte, las partes de las máquinas, el agua de los ríos, el aire de la atmósfera.
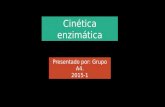
Durante este movimiento no se puede decir que varía solamente una coordenada del cuerpo. por ejemplo el movimiento ocurre en el plano, entonces como se ve en la figura 1, durante el movimiento varían dos coordenadas: X e Y. La dirección del movimiento, es decir, la dirección del vector velocidad varía durante todo el tiempo que dure el movimiento. Además, varía la dirección del vector aceleración.
Componente tangencial y normal

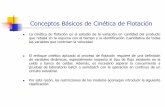
Las componentes rectangulares de la aceleración no tienen significado físico, pero si lo tienen las componentes de la aceleración en un nuevo sistema de referencia formado por la tangente a la trayectoria y la normal a la misma. Hallar las componentes tangencial y normal de la aceleración en un determinado instante es un simple problema de geometría, tal como se ve en la figura.
Se dibujan los ejes horizontal X y vertical Y.
Se calculan las componentes rectangulares de la velocidad y de la aceleración endicho instante. Se representan los vectores velocidad y aceleración en dicho sistema de referencia.
Se dibujan los nuevos ejes, la dirección tangencial es la misma que la dirección de la velocidad, la dirección normal es perpendicular a la dirección tangencial.
Con la regla y el cartabón se proyecta el vector aceleración sobre la dirección tangencial y sobre la dirección normal.
Se determina el ángulo θ entre el vector velocidad y el vector aceleración, y se calcula el valor numérico de dichas componentes: a1=acosθy an=senθ.
Componentes tangencial y normal
La velocidad es tangente a la trayectoria d la partícula.
En general, la aceleración no es tangente a la trayectoria
Por lo tanto, es conveniente transformar el vector aceleración en componentes dirigidas; esto es, la tangencial y normal a la partícula.

http://es.wikipedia.org/wiki/Fuerza
http://www.ecured.cu/index.php/Movimiento_curvil%C3%ADneo
Componentes TANGENCIAL Y NORMAL
La velocidad es tangente a la trayectoria d la partícula.
En general, la aceleración no es tangente a la trayectoria
Por lo tanto, es conveniente transformar el vector aceleración en componentes dirigidas; esto es, la tangencial y normal a la partícula.
Movimiento bajo una fuerza central
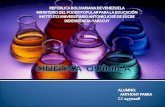
Cuando la única fuerza que actúa sobre una partícula P es una fuerza F dirigida hacia O alejándose de un punto fijo O, se dice que la partícula se está moviendo bajo una fuerza central, y el punto O se conoce como el centro de fuerza (figura 12.15). Puesto que la línea de acción de F pasapor O, se debe tener MO 0 en cualquier instante. Al sustituir la ecuación (12.19), se obtiene H˙ O 0 para todos los valores de t e, integrar en t, HO constante (12.23)
Se concluye en consecuencia que la cantidad de movimiento angular de una partícula que se mueve bajo una fuerza central es constante, tanto en magnitud como en dirección. Al recordar la definición de la cantidad de movimiento angular de una partícula (sección 12.7), se escribe r mv HO constante (12.24) de la cual se concluye que el vector de posición r de la partícula P debe ser perpendicular al vector constante HO. Por consiguiente, una partícula sometida a una fuerza central se mueve en un plano fijo perpendicular a HO. El vector HO y el plano fijo se definen mediante el vector de posición
La trayectoria de un espécimen bajo prueba en una centrífuga es un círculo horizontal. Las fuerzas que actúan sobre el espécimen y su aceleración pueden descomponerse en componentes radial y transversal con componentes r constante. y la velocidad inicial v0 de la partícula. Por conveniencia, se considerará que el plano de la figura coincide con el plano fijo de movimiento.
CONSERVACIÓN DE LA ENERGÍA
Cuando una partícula se mueve bajo la acción de fuerzas conservativas, el principio del trabajo y la energía puede expresarse en forma modificada. Al sustituir U1-2 de (13.9´) en (13.10), se escribe
V1 – V2 = T2 – T1
T1 + V1 = T2 + V2 (13.24)
Esta fórmula indica que cuando una partícula se mueve bajo la acción de fuerza conservativas, la suma de la energía cinética y de la energía potencial de la partícula permanece constante. La suma te T + V se denomina la energía mecánica total de la partícula y se denota por medio de E.

El peso de una partícula y la fuerza ejercida por un resorte son fuerzas conservativas, pero las fuerzas de fricción son fuerzas no conservativas. En otras palabras el trabajo producido por las fuerzas de fricción no puede expresarse cono un cambio de la energía potencial.
Principios de impulso y momento
PRINCIPIO DEL IMPULSO Y LA CANTIDAD DE MOVIMIENTO
El principio de impulso y la cantidad de movimiento se usa para resolver problemas que implican fuerza, masa, velocidad y tiempo. Es de particular interés en la resolución de problemas que implican movimiento impulsivo e impacto.
Considere una partícula de masa m sobre la cual actúa una fuerza F. la segunda ley de newton puede expresarse como
F =d/dt (mv) (13.27)
Donde mv es la cantidad de movimiento lineal de la partícula. Al multiplicar la ecuación por dt, e integrar a partir del tiempo t1 hasta el tiempo t2 se escribe
F dt = d (mv)
ʃ F dt = mv2 –mv1
O, al transponer el último término,
mv1 + ʃ F dt = mv2 (13.28)
La integral de la ecuación (13.28) es un vector conocido como impulso lineal o, simplemente impulso.
Imp1-2 = ʃ F dt
= i ʃ Fx dt + j ʃ Fy dt + k ʃ Fz dt (13.29)
La ecuación (13.28) expresa que cuando sobre una partícula actúa una fuerza F durante un intervalo dado, la cantidad de movimiento final mv2 de la partícula puede obtenerse al sumar su cantidad de movimiento inicial y el impulso de la fuerza durante el intervalo considerado.
mv1 + Imp1-2 = mv2 (13.30)
Cuando varias fuerzas actúan sobre la partícula deben de considerarse el impulso de cada una de ellas. Se tiene
mv1 + Ʃ Imp1-2 = mv2 (13.32)

SISTEMA DE PARTICULAS
2.1 Introducción
Hasta ahora se ha utilizado el modelo de partícula o punto material para el estudio de la
dinámica de los cuerpos de dimensiones finitas. En ese caso la partícula material se ha
considerado aislada, representando el resto del universo por la acción de fuerzas o por
su energía potencial. Pero, ¿qué ocurre cuando hay que considerar las dimensiones
del cuerpo en estudio?
La aproximación de punto material es válida en los movimientos de traslación y en
aquellos casos en los que la precisión en la localización del cuerpo es del orden de las
dimensiones de éste. Por tanto, hay de proponer un nuevo modelo que permita estudiar
los cuerpos, y su evolución temporal, en los casos en que la aproximación anterior no
sea válida. Este modelo es el de sistemas de partículas.
Sistema de partículas: Es un conjunto de partículas cuyas propiedades globales
queremos estudiar. Podemos distinguir varios modelos: 2
Sistema discreto, cuando el cuerpo se considera formado por un número finito
de partículas. Dentro de este modelo podemos considerar:
• Sistemas indeformables, en los que la distancia relativa entre las
partículas del sistema permanece inalterable en el tiempo.
• Sistemas deformables, en los que puede cambiar la distancia
relativa entre las partículas.
Sistemas continuos, cuando un cuerpo puede considerarse formado por una
distribución “continua” de materia (llenando todo el espacio que ocupa). Estos
sistemas se dividen en deformables e indeformables (sólidos rígidos).
Las fuerzas que actúan en los sistemas de partículas se clasifican en fuerzas interiores y
en fuerzas exteriores, ya que las partículas del sistema no sólo están interaccionando

entre sí sino con otras partículas externas al sistema.
Fuerzas interiores o internas, Fint
r
, son las que están aplicadas a las partículas del
sistema debidas a las interacciones con otras partículas del mismo sistema.
Fuerzas exteriores o externas, Fext
r
, son las que están aplicadas a partículas del
sistema debidas a partículas o agentes que no pertenecen al sistema
Por cada fuerza interna que actúa sobre una partícula del sistema existe otra igual y
opuesta, o sea, las fuerzas internas se presentan en parejas.
∑ = 0
Un ejemplo podría ser un sistema de partículas formado por la Tierra y la Luna: las
fuerzas exteriores serían las que ejerce el Sol (y el resto de los planetas) sobre la Tierra
y sobre la Luna. Las fuerzas interiores serían la atracción mutua entre estos dos cuerpos
celestes. 3