Choques Solido Rigido - Dinamica
8
Choque en Solido Rígido Choque Central y Choque Excéntrico Los sucesos de impacto se clasifican según la posición relativa de los centros de masa de los cuerpos, la velocidad relativa de los centros de masa u la línea de impacto: recta normal a las superficies en el punto de impacto. Cuando los centros de masa de ambos cuerpos se hallen sobra la línea de impacto, diremos que se trata de un choque central. Cuando el centro de masa de uno o ambos cuerpos no se halle sobra la línea de impacto diremos que se trata de un choque excéntrico, este tipo de impacto suele suceder cuando uno o dos cuerpos están limitados a girar con respecto a un eje fijo. Evidentemente, entre dos puntos materiales solo existirá choque central, ya que el tamaño y forma de los puntos supone que no afectan al cálculo de su movimiento
-
Upload
cesar-eduardo-chiclayo-herrera -
Category
Documents
-
view
136 -
download
2
description
Choques Solido Rígido, Dinámica, Impulso, Cantidad de Movimiento
Transcript of Choques Solido Rigido - Dinamica

Choque en Solido Rígido
Choque Central y Choque Excéntrico
Los sucesos de impacto se clasifican según la posición relativa de los centros de masa de los cuerpos, la velocidad relativa de los centros de masa u la línea de impacto: recta normal a las superficies en el punto de impacto. Cuando los centros de masa de ambos cuerpos se hallen sobra la línea de impacto, diremos que se trata de un choque central. Cuando el centro de masa de uno o ambos cuerpos no se halle sobra la línea de impacto diremos que se trata de un choque excéntrico, este tipo de impacto suele suceder cuando uno o dos cuerpos están limitados a girar con respecto a un eje fijo. Evidentemente, entre dos puntos materiales solo existirá choque central, ya que el tamaño y forma de los puntos supone que no afectan al cálculo de su movimiento

Choque Excéntrico
El análisis de los problemas de choque de puntos materiales se ha realizado en IMPULSO Y CANTIDAD DE MOVIMIENTO – PARTICULA, ilustraba el caso del choque central para el que la línea de impacto coincidía con la recta que une los centros de masa. Por lo tanto, las fuerzas de contacto en el choque pasaban por los centros de masa de los cuerpos (fig. 1)
Fig. 1
Estos problemas se resolvían echando mano de la conservación de la cantidad de movimiento junto con el coeficiente restitución (e), que comprar la velocidad relativa de separación de los puntos de contacto (después del choque) con su velocidad relativa de aproximación (antes del choque)
El problema e choque en cuerpos rígidos es muy parecido al de choque de puntos materiales, pero se complica ligeramente por el hecho de que la línea de impacto no suele pasar por los centros de masa de los cuerpos (fig. 2)
Fig. 2

Surge una nueva complicación si definimos el coeficiente de restitución diciendo que es el cociente entre el impulso de restitución y el impulso de deformación como se hizo con partícula. Un análisis semejante al realizado en el choque de partículas nos daría de nuevo el coeficiente de restitución como razón de la velocidad relativa de separación de los puntos de contacto (después del choque), a la velocidad relativa de separación de los puntos de contacto (antes del choque).
Ahora bien, la velocidad el cuerpo en el punto de impacto suele ser diferente a la velocidad de su centro de masa. Por lo tanto, cuando se trate de un choque excéntrico, las ecuaciones de velocidad relativa se deberán utilizar para relacionar las velocidades de los puntos de contracto en la ecuación del coeficiente de restitución y las velocidades de los centros de masa en las ecuaciones de los teoremas de la cantidad e movimiento y momento cinético.
Análisis del proceso de impacto
Considere, por ejemplo la colisión en C entre los cuerpo A y B que se muestra en la figura.
Se supone que justo antes de la colisión B gira en sentido contrario al de las manecillas del reloj a una velocidad angular (ωB)1. Los diagramas cinemáticos de ambos cuerpos justo antes de la colisión se muestra en la figura.
Siempre que los cuerpos sean uniformes, las fuerzas impulsoras que ejercen entre ellos están dirimidas a los largo de la línea de impacto. Por consiguiente, el componente de la velocidad del punto C en el cuerpo B, el cual está dirigido a lo largo de la línea de imparto es
(v¿¿B)1=(ωB)1 r ¿
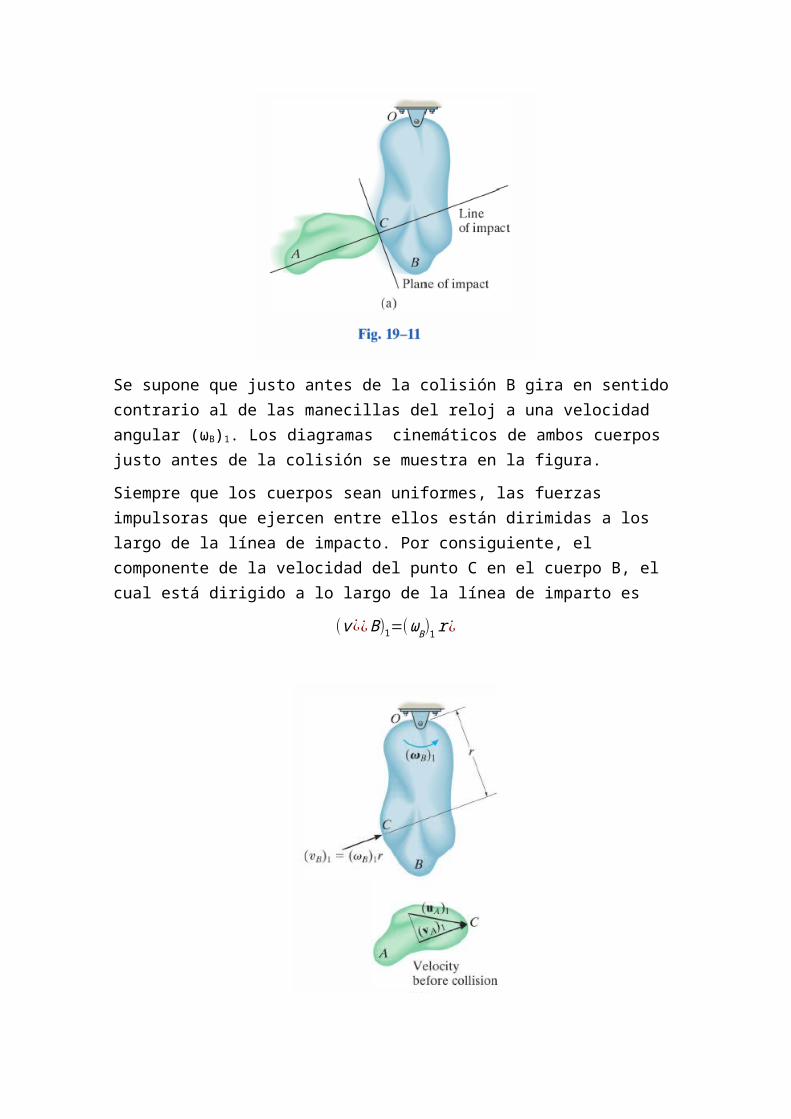
Asimismo, en el cuerpo A el componente de la velocidad (u¿¿ A)1 ¿ a los largo de línea de impacto es (v¿¿ A)1 ¿. Para que la colisión ocurra (v¿¿ A)1>(v¿¿B)1¿¿
Durante el impacto se ejerce una fuerza impulsora igual pero opuesta P entre los cuerpos, la cual los deforma en el punto de contacto. El impulso resultante se muestra en los diagramas de impulso de ambos cuerpos.
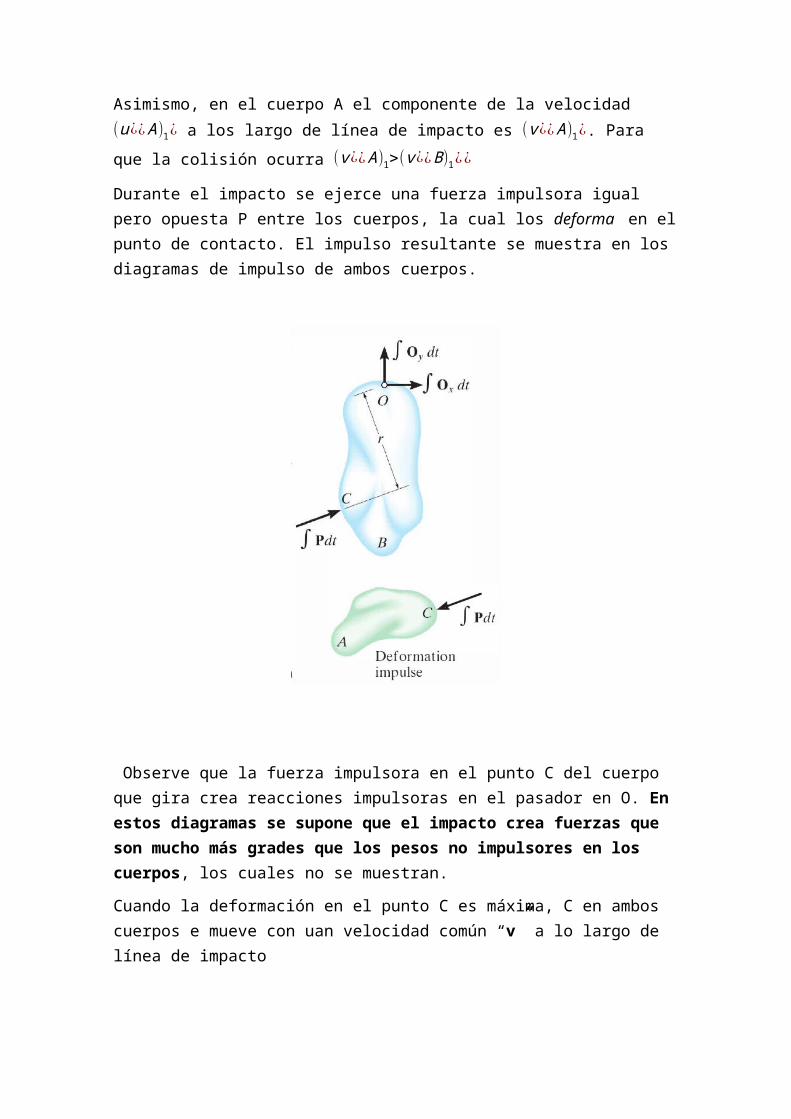
Observe que la fuerza impulsora en el punto C del cuerpo que gira crea reacciones impulsoras en el pasador en O. En estos diagramas se supone que el impacto crea fuerzas que son mucho más grades que los pesos no impulsores en los cuerpos, los cuales no se muestran.
Cuando la deformación en el punto C es máxima, C en ambos cuerpos e mueve con uan velocidad común “v” a lo largo de línea de impacto
Ocurre entonces un periodo de restitución durante el cual los cuerpos tienden a recuperar sus formas originales. La fase de restitución crea una fuerza impulsora igual pero opuesta R que actúa entre los cuerpos poco se muestra en el diagrama de impulso.

Despues de la restitución los cuerpos se aparttan de modo que el punto C en el cuerpo B tiene un velocidad (v¿¿B)2¿ y el punto C en el cuerpo A tiene una velocidad (u¿¿ A)2 ¿, donde
(v¿¿B)2>(u¿¿A)2 ¿¿
En general, un problema que implica impacto de dos cuerpos requiere determinar las dos incógnitas (v¿¿B)2¿ y (v¿¿ A)2 ¿; supondremos que (v¿¿ A)1 y (v¿¿B)1¿¿ son conocidas (o se puedendeterminar mediante cinematica ,metodos deenergia ,etc .). Para resolver problemas como estos deben escribirse dos ecuaciones.
Por lo general, la primera ecuación implica la conservación de la cantidad de movimiento angular a los dos cuerpos. En el caso de que los cuerpos A y B, podemos formular que la cantidad e movimiento angular se conserva con respecto al punto “O” puesto que los impulso en O crean un momento cero con respecto a O.
La segunda ecuación se obtiene por la definición del coeficiente de restitución “e”, el cual es la relación del impulso de restitución y el impulso de deformación.
Sin embargo es importante tener en cuenta que este análisis tiene una aplicación muy limitada en ingeniería, porque se encontró que los valores de “e” en este caso son muy sensibles al material, la geometría y la velocidad de los cuerpos que chocan.
Aplicando la conservación de la cantidad e movimiento para encontrar el impulso de deformación y restitución de tal manera que al dividirlos y remplazando la velocidad común de en el momento máximo obtenemos

e=(v¿¿ B)2−(v¿¿ A )2
(v¿¿A)1−(v¿¿B)1¿¿¿¿
Esta ecuación es similar a la obtenida cuando se tenía choques en partículas (impacto central)
Con el par de ecuaciones mencionadas obtuvimos (v¿¿B)2 y (v¿¿ A)2¿¿ pero para encontrar la velocidad en el centro de masa utilizaremos las ecuaciones de velocidad relativa
(v¿¿G)A=(v¿¿ A )2+ωA x rG A/ A¿¿
(v¿¿G)B=(v¿¿B)2+ωA xrG B/ A¿¿