CAPITULO II MOVIMIENTO DE UN PLANO...
21
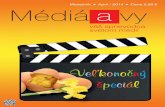
CAPITULO II MOVIMIENTO DE UN PLANO INCLINADO II.1 Modelo Físico y Matemático El transporte vibratorio de un plano inclinado es ampliamente usado en la transportación de piezas pequeñas especialmente en la industria de la manufactura donde se requiere que las piezas sean liberadas de manera periódica para su ensamble con otras partes. Un ejemplo de este tipo de dispositivos se muestra en la figura 2.1 el cual se usa [2] que aparece a continuación Figura 2.1 Transporte Vibratorio Inclinado En este transporte vibratorio se encuentra la masa, bajo el efecto de las vibraciones del plano inclinado, además de otros factores externos. Para entender bien las fuerzas que afectan el comportamiento de la masa es necesario recurrir al diagrama de cuerpo libre [1,11] de la masa sobre el plano inclinado, para ello se recurre a la figura 2.1 que se presenta a continuación
-
Upload
truongnguyet -
Category
Documents
-
view
219 -
download
0
Transcript of CAPITULO II MOVIMIENTO DE UN PLANO...

11
CAPITULO II
MOVIMIENTO DE UN PLANO INCLINADO
II.1 Modelo Físico y Matemático
El transporte vibratorio de un plano inclinado es ampliamente usado en la transportación de
piezas pequeñas especialmente en la industria de la manufactura donde se requiere que las piezas
sean liberadas de manera periódica para su ensamble con otras partes. Un ejemplo de este tipo de
dispositivos se muestra en la figura 2.1 el cual se usa [2] que aparece a continuación
Figura 2.1 Transporte Vibratorio Inclinado
En este transporte vibratorio se encuentra la masa, bajo el efecto de las vibraciones del plano
inclinado, además de otros factores externos. Para entender bien las fuerzas que afectan el
comportamiento de la masa es necesario recurrir al diagrama de cuerpo libre [1,11] de la masa
sobre el plano inclinado, para ello se recurre a la figura 2.1 que se presenta a continuación

12
?
Figura 2.2 Diagrama de cuerpo libre
De acuerdo con el diagrama de cuerpo libre de la figura 2.2 el sistema de coordenadas se fija al
plano inclinado y un nuevo sistema de coordenadas se fija a la masa, de ese modo se habla de un
movimiento relativo[5,7].
Ya que la masa esta en un plano inclinado se determina que esta tiene dos componentes de
vibración[11].
El análisis de las fuerzas inicia con las vibraciones que el plano ejerce sobre la masa, donde las
vibraciones están dadas por las ecuaciones 2.1 y 2.2, que tienen la siguiente forma
t)* sen(* xAxX w= (2.1)
correspondiente a la dirección en X donde Ax es la amplitud en X y wx es la frecuencia de
vibración en esta dirección.
) t* sen(* bw += yAyY (2.2)
donde Ay es la amplitud de vibración en la dirección Y, wy es la frecuencia de vibración en esta
dirección y b es el ángulo de fase de la vibración en X con respecto de Y.
Ya que estas son las vibraciones del plano y toda vez que el sistema de análísis es la masa es
necesario introducir las fuerzas inerciales de la masa debido a la aceleración del plano, para ell se
recurre a las ecuaciones 2.3 y 2.4 que describen estas fuerzas inerciales
t)* (* ** 2 xsenxAxmIx ww= (2.3)

13
donde m es la masa multiplicada por la aceleración del plano en la dirección X; recordando que
la aceleración es la segunda derivada de la posición con respecto al tiempo[5,7].
Para el caso de Y
) t* (* ** 2 bww += ysenyAymIy (2.4)
donde m es la masa y multiplicada por la aceleración del plano en la dirección de Y
De acuerdo con el diagrama de cuerpo libre presentado en la figura 2.1 otras fuerzas que afectan
el comportamiento de la masa son las componentes de la gravedad.
Para la dirección de X la componente de la gravedad esta descrita mediante la ecuación 2.5 que
tiene la siguinete forma
)cos(** agmGrx -= (2.5)
donde m es la masa que se analiza, g es la aceleración de la gravedad y a es el ángulo de
inclinación del plano respecto a la horizontal de acuerdo con el diagrama de cuerpo libre de la
figura 2.2.
Para la dirección de Y la componente de la gravedad se describe con la ecuacion 2.6 que se
presenta a continuación
)sen(** agmGry -= (2.6)
donde m es la masa que se analiza, g es la aceleración de la gravedad y a es el ángulo de
inclinación del plano con respecto a la horizontal.
Otra fuerza que afecta el comportamiento de la masa es la fuerza normal que esta descrita
mediante la ecuación 2.7 que tiene la siguiente forma
ÓÌÏ
-fi<
fi>=
YKyysí
ysíNy
* 0
0 0 (2.7)
donde ky es el coeficiente de elasticidad del plano vibratorio, ya que este tiene propiedades
elasticas [6].

14
Otra de las fuerzas que afectan el desplazamiento de la masa es la resistencia que el aire puede
ejercer sobre la masa, esta fuerza se describe conla ecuación 2.8, que se presenta a continuación
2*VxcayRax -= (2.8)
donde cay es el coeficiente de resistencia viscosa del aire, multiplicado por Vx al cuadrado, que
es la velocidad de la masa en la dirección de X.
Esta resistencia también tiene lugar en la dirección de Y y que se describe con la ecuación 2.9
que aparece a continuación
2*VycayRay -= (2.9)
donde cay es el coeficiente de viscosidad del aire, multiplicado por la velocidad Vy al cuadrado,
que es la velocidad en la dirección Y.
Desde luego que las fuerzas de resistencia viscosa son muy pequeñas pero es necesario tomarlas
en cuenta.
Una fuerza más que afecta el comportamiento de la masa es la fuerza por la resistencia viscosa
que el plano ejerce sobre la masa, ya que el plano tiene propiedades viscosas[1], lo que da lugar a
la ecuación 1.9 bajo las condiciones descritas y que se describe a continuación
ÓÌÏ
-fi<
fi>=
VyRyysí
ysíRy
* 0
0 0 (2.10)
donde c es el coeficiente de viscosidad del plano y Vy es la velocidad de la masa en esa
dirección.
Por último la fuera que mas influye en el movimiento de la masa es la fuerza de fricción Tx, que
toma lugar de acuerdo con la figura 1.3 en la que se da un comportamiento generalizado, justo
cuando la velocidad de la masa es cero en la dirección X.
Ya que se ha visto el comportamiento generalizado es necesario definirlo para este caso, para
ello se recurre a la ecuación 2.11, que tiene la siguiente forma

15
ÔÔÔ
Ó
ÔÔÔ
Ì
Ï
fi>
-fi≠£
ÔÓ
ÔÌÏ
+-fi>++
++-fi<++Æ=£
=
00
**0ademásy 0
)(***
)(*0Vx ademásy 0
Ysí
signoVxNyVxYsí
GrxIxsignoNyNyRaxGrxIxsí
RaxGrxIxNyRaxGrxIxsíYsí
Tx m
mm
m
(2.11)
Dentro del primer caso se presentan dos posibilidades:
La primer posibilidad de Tx se presenta cuando bajo las condiciones Y<0, Vx = 0 y cuando Ix
+ Grx + Rax< m * Ny; así la fuerza de fricción Tx tomara el valor –(Ix + Grx + Rax), de ese
modo la masa permanece constante y no experimenta ningún movimiento.
La segunda posibilidad se toma lugar bajo las siguientes condiciones Y<0, Vx = 0 y cuando Ix
+ Grx + Rax>m * Ny; el valor de la fuerza de fricción será -m * Ny * signo (Ix+Grx), se
multiplica por el signo de (Ix+Grx) porque la fuerza de fricción siempre es opuesta al
movimiento de la masa que no tendrá ningún desplazamiento, pero dará inicio al movimiento.
Para el segundo caso en donde se presentan las siguientes condiciones Y<0, V ≠ 0, la fuerza de
fricción tomará el valor de -m * Ny * signo (Ix+Grx), donde nuevamente la fuerza es
multiplicada por el signo de (Ix+Grx) ya que esta fuerza es siempre opuesta al movimiento.
Para el último caso la única condición que se presenta es Y>0, donde la fuerza de fricción será
cero, ya que en este caso la masa no esta en contacto con la pista.
Ahora es necesario obtener el total de las fuerzas que afectan a la masa en las direcciones X y Y
En primer lugar se da la sumatoria de la masa en la dirección de X, con lo que se genera la
ecuación 2.12, que se presenta a continuación
TxRaxGrxIxSx +++= (2.12)
estas son las fuerzas que afectan el comportamiento de la masa en la dirección X
Para el caso de Y se presenta la ecuación 2.13
RyRayNyGryIySy ++++= (2.13)

16
estas son las fuerzas que actúan sobre la masa en la dirección de Y.
Ahora aplicando la segunda ley de Newton [1,2,5,7,11] las ecuaciones 2.12 y 2.13 quedan de la
siguiente manera
oXmSx &&*= (2.14)
donde m es la masa de análisis y Xo” es la aceleración de esta, en la dirección X de acuerdo al
diagrama de cuerpo libre de la figura 2.2
para el caso de la dirección Y
oYmSy &&*= (2.15)
de las ecuaciones 2.14 y 2.15 se despeja la aceleración dando lugar a las ecuaciones 1.15 y 1.16 y
que tienen la siguiente forma
m
SxoX =&& (2.16)
para el caso de la dirección X
en tanto para la dirección Y
m
SyoY =&& (2.17)
en estos dos casos se obtiene la aceleración de la masa, en sus respectivas direcciones, que serán
integradas, para obtener la velocidad y estas serán integradas para obtener el desplazamiento.
Ya que todas las fuerzas físicas se han tomado en consideración, el primer paso es determinar
que parámetros son independientes, es decir que son valores constantes.
Los valores constantes son: m, k, c, ca, a, b, m, wx, wy.
Ahora que se conocen los parámetros que son constantes es necesario calcular el valor de cada
una de las fuerzas y determinar su efecto sobre el desplazamiento de la pieza.

17
Ya que las ecuaciones 2.16 y 2.17 son no lineales es necesario usar métodos numéricos para su
solución[1,2,9], que en este caso se resuelven con el uso de Powersim, bajo la selección de pasos
presentado en el siguiente esquema.
Condiciones iniciales
inicio
Y < 0 no si
N = 0
Ry = 0
ay = (Iy+N+Ry+Ray+Gry)/m
N = -k*Y
Ry = -c*vy
Vy
Y
Fx = 0
ay = (Iy+N+Ry+Ray+Gry)/m
Vx
siY < 0
Fx = - ? *Ny*(signo vx)
X
Vx
Y
Figura 2.3 Esquema de solución
Estos son los pasos que el programa seguirá para la solución de las ecuaciones, donde al llegar
hasta el final del esquema el valor obtenido se tomara en cuanta en el cálculo posterior a este.

18
II.2 Software de Simulación
A continuación se presenta el Software de simulación
vyi
yi Ny
Iy
Gry
ayi
Gr
gm
Ry
cay cy
Ray
m
Gr
alfa
ky
vyo
yoi yi
vyi
betaAy
ayo
omegay
vxo
xo
Ix
axo
axi
cay vx Ny
Tx
m
Grx
yi
m
Rax
x
vx
Sx
Ax
omegax
vx
miu
Gr
alfa
Figura 2.4 Diagrama de programación
Este es el diagrama de programación del software de simulación correspondiente al transporte
vibratorio en un plano inclinado como el de la figura 2.1

19
II.3 Simulación
Los datos presentados en la tabla 2.1 son sustituidos en el software, para poder mostrar un
comportamiento generalizado, a continuación se muestra la tabla 2.1
Tabla 2.1 Datos para la simulación 1
Con estos datos se genera la figura 2.5, que se muestra a continuación
Time
x
0.0 0.5 1.0 1.5 2.00.00
0.02
0.04
0.06
Figura 2.5 Comportamiento en dirección X
En esta figura se describe el comportamiento de la masa en la dirección de X, en donde es claro
que la masa avanza y después se detiene, sin experimentar retrocesos durante el tiempo de
simulación. En este caso el avance total que la masa ha experimentado es de X ª .07m. para un
tiempo de simulación igual a 2 segundos.
El comportamiento de la velocidad de la masa en la dirección X se muestra en la figura 2.6, que
aparece a continuación
Parámetros ValorMasa m .2 Kg
Amplitud en X Amx 2.5mmAmplitud en Y Amy 2.5mm
Angulo de Inclinación a 00
Angulo de fase b 00
Frecuencia en X wx 50 HzFrecuencia en Y wy 50 Hz
Coeficiente de fricción m .5

20
Time
vx
0.0 0.5 1.0 1.5 2.0
0.00
0.05
0.10
Figura 2.6 Velocidad en dirección X
En esta figura la velocidad aumenta y disminuye de un modo periódico constante, esto es debido
a que el movimiento de la masa es de carácter senoidal por esa razón la grafica de la velocidad
tiene una forma similar. En esta figura los valores de la velocidad están en un rango de 0 - .12 m/s
Para este mismo caso el comportamiento en la dirección de Y esta descrito por la figura 2.7 que
se presenta a continuación
Time
yi
0.0 0.5 1.0 1.5 2.0
-0.00004
-0.00003
-0.00002
-0.00001
-6.7763e-21
0.00001
Figura 2.7 Comportamiento en Y
Al inicio del movimiento en esta dirección la masa, experimenta una aceleración debido a que
esta inicia el movimiento desde el reposo, esta aceleración se manifiesta en la grafica en el
periodo de 0.0 - .5 segundos, ya que en este periodo se observan los desplazamientos de mayor
magnitud en todo el tiempo de simulación; después de este periodo la masa tiene un
comportamiento periódico donde esta no pierde el contacto con la pista, ya que en la grafica se

21
observa que la masa tiene oscilaciones sólo en un rango negativo de desplazamiento de magnitud
muy baja.
Por último se presenta la figura 2.8, que contiene el comportamiento de las fuerzas de fricción y
resultante para un periodo corto de toda la simulación con el fin de entender mejor el
comportamiento de estas fuerzas.
Time
Tx1
Sx2
1.00 1.05 1.10 1.15
-2
-1
0
1
2
1
21
2
1
2
1
2
Figura 2.8 Análisis de Fuerzas
el primer caso donde se presentan las flechas más gruesas con líneas continuas el valor de la
fuerza resultante Sx es mayor que la fuerza de fricción Tx, la cual a su ves es negativa y opuesta
al movimiento; como resultado de esta suma de fuerzas la masa se desplaza en dirección positiva
sobre el eje X. La segunda caso se presenta para el caso señalado con las flechas de menor
espesor y con líneas punteadas, donde la fuerza resultante Sx es negativa para la que el
desplazamiento es negativo, pero de muy baja magnitud y en un periodo muy corto de tiempo,
por lo que el desplazamiento es prácticamente despreciable. En el tercer caso la fuerza resultante
Sx es de menor magnitud que la fuerza de fricción Tx, aunque las dos magnitudes son positivas,
en ese rango la fuerza Sx tiende a disminuir mientras la fuerza de fricción tiende a aumentar, ya
que siempre la fuerza de fricción es opuesta al movimiento. La descripción anterior tiene como
objetivo ilustrar, el avance de la masa sobre el plano inclinado.

22
II.4 Definición de Velocidad de la masa y Parámetros del Plano Inclinado
Ahora es necesario determinar la relación de la velocidad de la masa en función de los
parámetros del plano inclinado; para ello es necesario obtener una curva característica de la
velocidad en función de uno de los parámetros, por lo tanto los demás parámetros que afectan el
comportamiento de la masa permanecerán fijos. Para obtener la primer curva característica,
dentro del software se sustituyen los valores de la tabla 2.2, que se presenta a continuación
Tabla 2.2 Datos para obtener Curvas Características en
Función de m
con los datos de la tabla anterior donde las amplitudes son Amx =2.5mm, Amy =2.5mm y
después de 15 simulaciones se obtiene la figura 2.9 que se presenta a continuación
Velocidad vs . m Amx=Amy=2.5mm
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
m
Vel
ocid
ad m
/s
Velocidad Polinómica (Velocidad)
Figura 2.9 Velocidad vs. m
Parámetros ValorMasa m .2 Kg
Amplitud en X Amx 2.5mmAmplitud en Y Amy 2.5mm
Angulo de Inclinación a 00
Angulo de fase b 00
Frecuencia en X wx 50 HzFrecuencia en Y wy 50 Hz

23
En esta figura la masa tiene la mayor velocidad, donde el coeficiente de fricción m ª .3, para el
que corresponde un valor de Vx ª .05 m/s, donde después de ese valor la velocidad Vx disminuye
con el incremento del coeficiente de fricción m, como se muestra en la grafica.
Ahora se presenta el caso donde se usan los datos de la tabla 2.2 para obtener la curva
característica de la velocidad con valores de amplitud Amx =3mm, Amy =3mm, con lo que se
llega a la figura 2.10 que se presenta a continuación
Velocidad vs. m Amx=Amy=3mm
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6m
Vel
oci
dad
m/s
Velocidad Polinómica (Velocidad)
Figura 2.10 Velocidad vs. m
Esta curva presenta un tendencia similar a la curva anterior en la que el valor de la velocidad
máxima se alcanza para un coeficiente de fricción m » .4, donde la masa tiene un valor de
velocidad Vx = .07 m/s, después de este valor la velocidad disminuye con el incremento del
coeficiente de fricción m.
Ahora se presenta un tercer caso donde se usan los valores de la tabla 2.2, con amplitudes Amx
=5mm, Amy =2.5mm, para obtener una tercera curva característica, que genera la figura 2.11
que se muestra a continuación

24
Velocidad vs . m Amx=5mm, Amy=2.5mm
0
0.02
0.04
0.06
0.08
0.1
0.12
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6m
Vel
oci
dad
m/s
Velocidad Polinómica (Velocidad)
Figura 2.11 Velocidad vs. m
La velocidad máxima correspondiente a los datos anteriores se presenta donde el coeficiente de
fricción es m » .6 con el cual se obtiene una velocidad de Vx = .1 m/s, ya que después de este
valor la velocidad disminuye con el incremento del coeficiente de fricción m.. Para este caso en
particular se usa un valor diferente en la amplitud Amy, ya que con un valor mayor al presente la
masa pierde contacto con la superficie del plano lo que provoca una disminución significativa de
la velocidad Vx, porque no hay una fuerza de fricción que se oponga al movimiento sea este
positivo o negativo.
Para entender el efecto de los cambios en estos parámetros es necesario utilizar las curvas
características las cuales generan la figura 2.12 donde se analizan las tres curvas características
de los casos anteriores. A continuación se presenta la figura 2.12

25
Velocidad vs. m
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
m
Vel
oci
dad
m/s
Polinómica (Amx=Amy=2.5mm) Polinómica (Amx=Amy=3mm)Polinómica (Amx=5mm Amy=2.5mm)
Figura 2.12 Velocidad vs. m
En la figura con el aumento de los valores para las amplitudes se observa que también aumenta
el valor del coeficiente de fricción m donde se presenta la velocidad máxima en la dirección X y
aunque las graficas presentan diferentes valores para la velocidad Vx, tienen una tendencia
similar a disminuir la velocidad con el aumento del coeficiente de fricción, aunque el tercer caso
presente valores diferentes en las amplitudes, no siendo el caso de los otros dos.
También es necesario presentar el caso donde se tiene un valor constante para el
coeficiente de fricción con diferentes valores para el ángulo de inclinación a. Para ello se
requieren valores fijos en los parámetros, que se presentan en la tabla 2.3
Tabla 2.3 Datos para obtener Curvas Características en
Función de m
Parámetros ValorMasa m .2 Kg
Amplitud en X Amx 2.5mmAmplitud en Y Amy 2.5mm
Coeficiente de fricción .5Angulo de fase b 00
Frecuencia en X wx 50 HzFrecuencia en Y wy 50 Hz

26
Con estos datos y con valores de Amx =2.5mm, Amy =2.5mm se obtiene la figura 2.9, que
describe el comportamiento de la masa cuando el valor del ángulo de inclinación aumenta, ahora
se presenta la figura 2.13
Velocidad vs a Amx=Amy=2.5mm
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0 2 4 6 8 10 12 14 16
a
Vel
oci
dad
m/s
Velocidad Polinómica (Velocidad)
Figura 2.13 Velocidad vs. a
En este caso el incremento del ángulo de inclinación trae consigo una disminución en el valor de
la velocidad; en que el incremento del ángulo disminuye el valor de la velocidad de manera
lineal. En esta figura se observa que la velocidad máxima se logra para un ángulo a =0º en el que
la velocidad es Vx ».035 m/s, mientras que la velocidad mínima se presenta para el ángulo a
=15º, donde el valor es Vx ».003 m/s, en el que esta velocidad es aproximadamente 10 veces
menor que la velocidad máxima.
Ahora se presenta un caso similar para amplitudes Amx =3mm, Amy =3mm, que generan la
figura 2.10 que se presenta a continuación

27
Velocidad vs a Amx=Amy=3mm
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0 2 4 6 8 10 12 14 16a
Vel
oci
dad
m/s
Velocidad Polinómica (Velocidad)
Figura 2.14, Velocidad vs. a
Para este caso la velocidad máxima es de Vx =.06 m/s, correspondiente a un valor para el ángulo
de inclinación de a =0º; mientras que la velocidad mínima se presenta donde a =15º en el que la
velocidad adquiere el valor de Vx ».01 m/s; sólo cinco veces menor que la velocidad máxima.
Ahora con Amx =5mm, Amy =2.5mm se genera la figura 2.15, que aparece a continuación
Velocidad vs a Amx= 5mm Amy=2.5mm
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0 2 4 6 8 10 12 14 16
a
Vel
oci
dad
m/s
Velocidad Polinómica (Velocidad)
Figura 2.15 Velocidad vs. a
En este caso la velocidad máxima es de Vx ».1 m/s para un valor del ángulo de inclinación a =0º,
mientras la velocidad mínima es Vx » -.06 m/s donde el ángulo de inclinación es a =15º

28
En este último caso la velocidad mínima resulta ser negativa, esto debido a que el incremento de
la amplitud en X es demasiado grande; por lo que se requiere un mayor valor para el coeficiente
de fricción m, ya que esta misma tendencia se observa en la grafica 2.16.
Ahora se presenta la figura 2.16 donde se muestran juntas las figuras 2.13, 2.14, 2.15, esto para
comparar las tendencias entre los tres casos anteriores.
Velocidad vs. a
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0 2 4 6 8 10 12 14 16
a
Vel
oci
dad
m/s
Polinómica (Amx=Amy=2.5mm) Polinómica (Amx=Amy=3mm)Polinómica (Amx=5mm Amy=2.5mm)
Figura 2.16 Velocidad vs. a
En esta figura el aumento del ángulo de inclinación a provoca una disminución en la velocidad,
de la masa en la dirección X. Con el aumento de las amplitudes se logran velocidad más grandes,
pero solo dentro de un rango de a que en este caso es 0º £ a £ 6º, ya que fuera de ese rango los
valores de velocidad más pequeños corresponden a valores de amplitud mayores.
Por último con los datos de la tabla 2.2 y Dado que las amplitudes Amx =2.5mm, Amy =2.5mm
son los valores para los cuales se logra tener desplazamientos positivos, aun con el mayor ángulo
de inclinación a =15º; se presenta el caso donde se tiene un coeficiente de fricción m =.7 con
valores de amplitud Amx =2.5mm, Amy =2,5mm, para los cuales se obtiene la figura 2.17 que se
muestra a continuación

29
Velocidad vs . a Amx=Amy=2.5mm m=.7
0
0.005
0.01
0.015
0.02
0.025
0 2 4 6 8 10 12 14 16a
Vel
ocid
ad m
/s
Posición Polinómica (Posición)
Grafica 2.17 Velocidad vs. a
En este caso la velocidad máxima se logra con el valor de a =0º, al que corresponde un valor de
Vx ª.021 m/s, donde después de ese valor el incremento de a viene acompañado por una
disminución en la velocidad Vx; hasta un valor mínimo de Vx ª.0025 m/s para el cual el ángulo
de inclinación tiene un valor de a =15º. Donde este ultimo valor de la velocidad es diez veces
menor al valor que se presenta cuando el plano no tiene ningún ángulo de inclinación, es decir
cuando a =0º.
Ahora se analiza el caso donde las amplitudes son Amx =2.5mm, Amy =2.5mm, para un
coeficiente de fricción m =.8, para que al igual que en el caso anterior haya un análisis de los
valores máximos y mínimos que se generan en los valores extremos de los ángulos de
inclinación con ese fin se genera la figura 2.18 que se presenta a continuación

30
Velocidad vs. a Amx=Amy=2.5mm m=.8
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0 2 4 6 8 10 12 14 16a
Vel
ocid
ad m
/s
Posición Polinómica (Posición)
Figura 2.18 Velocidad vs. a
Donde el valor máximo de la velocidad es Vx ª.016 m/s, que corresponde al valor de a =0º; en el
caso de la velocidad para el ángulo a =15º, el valor de la velocidad tiene un valor Vx ª.0013 m/s.
Esta última velocidad Vx es diez veces menor a la velocidad inicial, donde el valor de esta
disminuye con el aumento del ángulo de inclinación a.
Por último es necesario analizar los das dos curvas características anteriores para determinar la
tendencia, de la velocidad con el incremento de a para diferentes los valores analizados de m.
Velocidad vs . a Amx=Amy=2.5mm
0
0.005
0.01
0.015
0.02
0.025
0 2 4 6 8 10 12 14 16a
Vel
ocid
ad m
/s
m=.7 m=.8Polinómica (m=.7) Polinómica (m=.8)
Figura 2.19 Velocidad vs. a

31
La figura 2.19 contiene a las dos curvas características que presentan la misma tendencia a
disminuir el valor de la velocidad Vx, con el incremento del ángulo de inclinación a, para los
dos valores del coeficiente de fricción. Otra característica es que se logran mayores velocidades
con el incremento de m.









![L+# * ($# ! * $ * #& # * *' # $* *(+#% )€¦ · = lim [ ( ) − ] = lim + − 4 + 4 − 4 + 4 − = + − 4 + 4 − ( − 4 + 4 ) − 4 + 4 = lim 5 − 8 + 4 − 4 + 4 = ∞ ∞](https://static.fdocuments.ec/doc/165x107/5f483e2f6fe8343e605bd54f/l-lim-a-lim-a-4-4.jpg)