Cap 3 Estatica 2015 II 1
48
Capítulo 3: Equilibrio 3.1. Equilibrio de una partícula Consideremos una partícula sometida a un conjunt o de n fuerzas: F 1 , F 2 ,…,F n . Sabemos de la primera de ley de Newton que “si la fuerza resultante de todas las fuerzas que actúan sobre una partícula es nula, la partícula permanecer en reposo si ori!inalmente estaba en reposo, o continuar su mo"imiento con "elocidad constante a lo lar!o de una trayectoria rectilínea si ori!inalmente se estaba mo"iendo#. $or lo tanto, se deduce que para que una partícula est% en equilibrio la suma de todas las fuerzas que actúan sobre ella sea el "ector nulo: R= ∑ i =1 n F i = 0 ( 3.1) &a ec. '(.)* es una ecuaci+n "ectorial. eniendo en cuenta que cada una de las fuerzas es un "ector de tres componentes, F i =( F x , F y , F z ) , la ec. '(.)* da lu!ar a tres ecuaciones escalares independientes: ∑ i=1 n F x = 0 ( 3.2) ∑ i=1 n F x = 0 ( 3.3 ) ∑ i=1 n F x = 0 ( 3.4) 3.2. Pasos para resolver problemas de estática 1
-
Upload
fiunsithuzhikllofiunsi -
Category
Documents
-
view
218 -
download
0
Transcript of Cap 3 Estatica 2015 II 1
8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 1/48
Capítulo 3:
Equilibrio 3.1. Equilibrio de una partícula
Consideremos una partícula sometida a un conjunto de n fuerzas: F
1, F
2, … , F n .
Sabemos de la primera de ley de Newton que “si la fuerza resultante de todas las
fuerzas que actúan sobre una partícula es nula, la partícula permanecer en reposo si
ori!inalmente estaba en reposo, o continuar su mo"imiento con "elocidad constante a
lo lar!o de una trayectoria rectilínea si ori!inalmente se estaba mo"iendo#. $or lo tanto,
se deduce que para que una partícula est% en equilibrio la suma de todas las fuerzas
que actúan sobre ella sea el "ector nulo:
R=∑i=1
n
F i=0 (3.1)
&a ec. '(.)* es una ecuaci+n "ectorial. eniendo en cuenta que cada una de las
fuerzas es un "ector de tres componentes, F i=( F x ,F y ,F z) , la ec. '(.)* da lu!ar a tres
ecuaciones escalares independientes:
∑i=1
n
F x=0(3.2)
∑i=1
n
F x=0(3.3)
∑i=1
n
F x=0(3.4)
3.2. Pasos para resolver problemas de estática
1

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 2/48
&os pasos que !eneralmente -ay que se!uir para resol"er problemas de equilibrio
esttico son los si!uientes:). le!ir el modelo que se "a a utilizar para describir los cuerpos materiales
'partícula, sistema de partículas, s+lido rí!ido, sistema de s+lidos rí!idos, etc.*.
/. 0ibujar el diagrama de fuerzas y, a la "ista del dia!rama, ele!ir el sistema dereferencia ms con"eniente 'es decir, aquel en que la soluci+n del problema, sea
ms fcil*.(. 1presar "ectorialmente en ese sistema de referencia todas las fuerzas que
inter"ienen.2. $lantear las ecuaciones de equilibrio.3. 4esol"er el sistema de ecuaciones formado por las ecuaciones de equilibrio.5. 1presar las soluciones teniendo en cuenta su naturaleza escalar o "ectorial
'por ejemplo, las fuerzas son ma!nitudes "ectoriales* sin ol"idar las
correspondientes unidades.
Ejemplo de aplicación 3.1
6n cuerpo de /7 8N se mantiene en equilibrio mediante una fuerza de F
1 que
forma un n!ulo de (79 respecto a la "ertical, y mediante otra fuerza -orizontal F
2 .
0eterminar F
1 y F
2 .
Soluci+n(79 (79
F 1
F 1
F 2
F 2 W =20kN
a) Esquema del problema b) diagrama de cuerpo
(partícula) libreFigura 3.1
). $ara describir el cuerpo usamos el modelo de una partícula. s decir, -aremos
la abstracci+n de que el cuerpo se comporta, a todos los efectos que nos
interesan estudiar, como una partícula.
2

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 3/48
/. l dia!rama de cuerpo libre y el sistema de referencia ele!ido se ilustran en la
fi!ura (.) b
(. Sobre la partícula actúan s+lo tres fuerzas: su peso W , la fuerza F 1 y la
fuerza -orizontal F 2 . &as e1presiones "ectoriales de son:
30
−sen30,cos¿=(− F 1
2, √ 3 F
1
2 ), F 2= F
2(1,0)
W = (0,−20) kN , F 1= F
1¿
')*
0ebe quedar claro cules son los datos del problema: W y las direcciones y
sentidos de F
1 y F
2 y cules son las inc+!nitas: los m+dulos de F
1 y F
2
representados por F
1 y F
2 .
2. $uesto que se trata de una sola partícula, la ecuaci+n "ectorial de equilibrio se
escribe como: R=W + F
1+ F
2=0
ratndose de un sistema de fuerzas coplanarias, la ecuaci+n "ectorial es
equi"alente a dos ecuaciones escalares:
∑ F x=0
=
− F 1
2 + F 2=0
(2
)
∑ F y=0=−20+√ 3 F
1
2 =0 (3)
3. 4esoluci+n de las ecuaciones de equilibrio 0e la ec. '(* se obtiene
F 1=
40
√ 3 N (4)
Sustituyendo este resultado en '/* obtenemos
F 2=20√ 3
N (5)
5. eniendo en cuenta las e1presiones ')* y los y las soluciones '2* y '3*,
obtenemos
3

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 4/48
a)
200 N
F
E
D
C
20
4
!
"
F 1=(−20
√ 3,20) N , F
2=(
20
√ 3,0) N
Ejemplo de aplicación 3.2 l sistema de bloques y cables de la fi!ura se encuentra en equilibrio. 0eterminar
a* &as fuerzas en los cables, en el resorte y el peso del bloque b* l alar!amientos del resorte C0
Soluci+n). $ara describir el problema usamos el modelo de un sistema de partículas. s decir,
-acemos la abstracci+n de que el sistema se comporta, a todos los efectos que nos
interesan estudiar, como un sistema de partículas./. &os dia!ramas de cuerpo libre y el sistema de referencia ele!ido se ilustran en la fi!ura
(./ b* y c*
(. Sobre la partícula ; actúan tres fuerzas: el peso del bloque
W E , y las fuerzas en los
cablesT AB y
T BC < y sobre la partícula C las fuerzas el peso del bloque :W F ,
la fuerzaT BC y la fuerza
T CD . &as e1presiones "ectoriales de las fuerzas son:
4
c
b)
Figura

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 5/48
20
−cos 20,sen¿ ;T BC =T BC (cos 20 ,sen20)W E=(0,−200) N ,T AB=T AB¿
T CB=T BC (−cos20 ,−sen20) ;
45
cos 45 ,sen¿W F =(0,−W F ) N ,T CD=T CD¿
&os datos del problema son el peso de los bloquesW E y las direcciones y
sentidos deT AB ,
T BC yT CD y las inc+!nitas son los m+dulos de las fuerzas
T AB ,T BC ,
T CD y W F representados porT AB ,
T BC ,T CD y W F .
2. $uesto que el sistema se compone de dos partículas, las ecuaciones "ectoriales deequilibrio lo escribimos como:
$ara la partícula ; 'fi!ura b*
W E+T AB =
T BC =0'/*
$ara la partícula C 'fi!ura c*
W F +¿ =
T BC +T CD=0 '(*
ratndose de un sistema de fuerzas coplanarias, las ecuaciones "ectoriales
son equi"alentes a las si!uientes ecuaciones escalares: 0e la ecuaci+n '/*
+→∑ F x=0 :−T AB cos20+T BC cos20=0(4 )
+↑∑ F y=0:T AB sen20+T BC sen 20−200=0(5)
0e la ecuaci+n '(*
+→∑ F x=0 :−T BC cos20+T CDcos 45=0(6)
+↑∑ F y=0:−T BC sen20+T CD sen45−W F =0(7)
3. 4esoluci+n de las ecuaciones de equilibrio
0e la c. '2* se obtieneT AB=T BC (8)
Sustituyendo este resultado en '3* obtenemosT AB=T BC =292.4 N (9)
4eemplazando este "alor en la ecuaci+n '5*, -allamos
(1)

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 6/48
T CD=388.6 N (10)
reemplazando este "alor en la ecuaci+n > encontramosW F =175 N (11)
conociendo el m+dulo de la fuerza en el resorte C0 -allamos su alar!amiento como
δ =T CD
K =
388.6 N
389 N /cm=1cm
5. eniendo en cuenta las e1presiones ')* y los y las soluciones '?* '@*, ')7* y '))*,
obtenemos
T AB=T BC =(−274.75 ,100) N ;T CD=(−274.75,274 .75) N ;W F =(0,−175 ) N
3.3 Equilibro del cuerpo rígido
l tamaAo y la forma del cuerpo rí!ido son muy importantes en el estudio de su
equilibrio, ya que las fuerzas que actúan sobre cuerpo no es necesariamente un
sistema de fuerzas concurrentes. &a fi!ura muestra un cuerpo rí!ido sometido a la acci+n de un par de fuerzas. Se
puede "er que aunque la resultante del sistema es cero, el cuerpo no est en equilibrio
ya que el par de fuerzas le imprimir una rotaci+n.
i!ura (.(
Consideremos un sistema !eneral de fuerzas que est actuando sobre un cuerpo
rí!ido. Bemos demostrado en el capítulo anterior que un sistema !eneral de fuerzas se
puede reducir a la resultante ms un par actuando en un punto cualquiera P . Si la
resultante y el par son nulos, diremos que el sistema ori!inal de fuerzas e1ternas es
equi"alente a un sistema nulo y que el cuerpo rí!ido est en equilibrio .
Cuerpo rígido
# F
2

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 7/48
$
%&
i!ura (.2
ntonces las condiciones necesarias y suficientes para que un cuerpo rí!ido se
encuentre en equilibrio son que el sistema de fuerzas actuando sobre cuerpo debe ser
el sistema nulo, es decir:
R=∑i=1
n
F i=0 (3.3)
M P=0(3.4)
stas ecuaciones "ectoriales se pueden descomponer en seis ecuaciones
escalares
∑i=1
n
F x=0 ,∑i=1
n
F y=0 ,∑i=1
n
F z=0(3.5)
∑i=1
n
M x=0 ,∑i=1
n
M y=0 ,∑i=1
n
M z=0(3.6)
3.3.1 Diagrama de cuerpo libre
$ara escribir correctamente las ecuaciones de equilibrio de un s+lido rí!ido primero
-ay que identificar correctamente todas las fuerzas e1ternas que actúan sobre %l.
0ic-as fuerzas pueden ser:
uerzas e1ternas aplicadas sobre el cuerpo
$eso propio del cuerpo actuando en su centro de !ra"edad
4eacciones en los apoyos en que se sustenta el cuerpo
n el caso de un sistema de cuerpos rí!idos, se tiene que considerar tambi%n lasfuerzas ori!inadas en los correspondientes enlaces 'apoyos internos del sistema*
uerzas de fricci+n actuantes
D continuaci+n se debe dibujar el denominado diagrama de cuerpo libre. 0ic-o
dia!rama debe ser lo ms claro posible y debe contener la si!uiente informaci+n:
'
F 1
F i
.
F n

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 8/48
F
squema del cuerpo en estudio: debe ser lo ms claro posible y en %l se deben
caracterizar de manera apro1imada las formas !eom%tricas del cuerpo en estudio.
odas las fuerzas e1ternas que actúan sobre %l. $ara las fuerzas de m+dulo,
direcci+n y sentido conocidos 'datos del problema* es importante incluir esa
informaci+n en el dia!rama. Si las fuerzas son de direcci+n y o sentido
desconocidos 'inc+!nitas del problema, como por ejemplo las fuerzas de reacci+n
en los apoyos*, se debe asi!narles dic-as características. Dl momento de
solucionar las ecuaciones de equilibrio conoceremos los "erdaderos sentidos.
&as dimensiones que puedan necesitarse para los clculos de los momentos de
las fuerzas. $rescindir de las dimensiones que sean redundantes, pues pueden
restarle claridad al dia!rama.
l dia!rama de cuerpo libre '0C&* es el paso esencial en la soluci+n de un
problema de equilibrio y su importancia es tal que de %l dependern los clculos
posteriores. Si el dia!rama contiene datos errados o es incompleto, las ecuaciones y,
por lo tanto, los resultados obtenidos sern err+neos. D-ora, el dia!rama es
esquemtico y puede ser dibujado a mano alzada. Sin embar!o, se recomienda usar
una re!la o comps simples con la finalidad de mejorar la claridad de los dia!ramas.
$or ejemplo, si tenemos un problema como el de la fi!ura (.2 a, el s+lido 'esfera*
quedar aislado como se muestra en la fi!ura (.3 b. &ue!o se colocan las fuerzas queestn actuando en el cuerpo analizado, que son:
E el peso propio del s+lido, a menos que se indique que este es despreciable.
E las fuerzas e1ternas actuantes sobre el s+lido 'en este caso, la fuerza F *.
a* b*
i!ura (.3

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 9/48
*
N
+
FR F
E las fuerzas pro"enientes de apoyos 'en este caso, la normal del piso N , la fuerza del
resorte F R y la fuerza de tensi+n del cable T *.
odas esas fuerzas se colocan en sus direcciones reales. n el caso del ejemplo,
conocemos el sentido del peso 'siempre de arriba -acia abajo*, el sentido de la normal
'siempre como una reacci+n del piso al s+lido* y el sentido de la tensi+n en el cable
'siempre “jalan# al s+lido*. No se conoce el sentido de la fuerza del resorte que puede
estar comprimido o estirado, así que asumimos un sentido arbitrario. l 0C& quedar
como el de la fi!ura (.5
i!ura (.5
3.3.2 Equilibrio del solido rígido en el plano
$ara un cuerpo rí!ido sometido a fuerzas coplanarias, las condiciones de equilibrio
definidas por las ecuaciones '(.(* y '(.2* se reducen a tres ecuaciones escalares:∑ F x=0 ,∑ F y=0 ,∑ F z=0(3.7)
$ara un sistema de cuerpos enlazados entre sí 'una estructura por ejemplo*, si la
estructura est en equilibrio cada uno de los cuerpos que lo componen est en
equilibrio. s decir, las condiciones de equilibrio se cumplen tanto para cada uno de los
cuerpos como para la estructura total.
Ejemplo de aplicación 3.3
&a placa trian!ular mostrada en la fi!ura est sustentada mediante tres bielas
'fi!ura (.>*. Se pide determinar las fuerzas en las tres bielas. &ue!o de esto calcular el
"alor de la resultante de las fuerzas aplicadas y ubicarla sobre la línea D;
,

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 10/48
i!ura (.>
Soluci+n
). le!imos como modelo el cuerpo rí!ido en el plano 'trin!ulo D;C0*
/. 0ia!rama de cuerpo libre '0C&* y sistema de referencia. Se muestra en la fi!ura (.?
i!ura (.?
(. Sobre la placa rí!ida D;C0 actúan las reacciones R A , RC , R D , las fuerzas
-orizontales F
1= P , F
2=2 P
, la fuerza "ertical F
3=2 P
y el par M . Sus
e1presiones "ectoriales son:
R A=− R A j , RC = Rc (−√ 2
2i , √
2
2 j) , R D= R D i
F 1= P i ,F
2=2 Pi ,F
3=−2 P j ,M =−3 P k
2. &as ecuaciones "ectoriales de equilibrio se escriben como:
10
RC
√
R D
R A
y
x
(1

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 11/48
R= R A+ RC + R D+ F 1+ F
2+ F
3=0 ; M D=0
0e estas ecuaciones "ectoriales se deducen las tres ecuaciones escalares si!uientes:
∑ M D=− P( 2
3 )−2 P ( )+2 P (2 )−3 P+ Rc (√ 2)=0(2)
∑ F x= R D+ P+2 P− Rc
√ 2
2=0(3)
∑ F y=− Rc−2 P+ Rc
√ 2
2=0(4)
3. 4esoluci+n de las ecuaciones de equilibrio. 0e la ecuaci+n '/* obtenemos
Rc = 6.835P '3*
4eemplazando el "alor de Rc en la ecuaci+n '(* y '2* obtenemos
R D = 1.833P y R A=2.833 P
'5*
5. 6sando las cs..')* y las soluciones '3* y '5* escribimos las reacciones en forma
"ectorial
R A=−2.833 P j , RC =6.835 P(−√ 2
2i ,
√ 2
2 j) ,
R D=1.833 Pi
>. 4esultante de las fuerzas aplicadas y su intersecci+n con el se!mento D;. 6sando el
concepto de sistemas de fuerzas equi"alentes, la resultante y momento en un centro
de reducci+n arbitrario deben ser i!uales en los sistemas de fuerzas mostrados en la
fi!ura (.@
11

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 12/48
Sistema F Sistema FFi!ura (.@
Sistema F R ! = F
1+ F
2+ F
3=3 P i−2 P j
M A
!
=(−3 P−4 P+2 P+
4
3 P
)k =(
−11
3 P
)
Sistema FF R !! =3 P i−2 P j
M A
!! =(−2 P" )8
$or lo tanto, i!ualando M A !
con M A !!
se tiene
−11
3 P=−2 P" → "=
11
6
3.3.2.1 Reacciones en los apoos de estructuras planas
n !eneral se puede afirmar que las reacciones que se ori!inan en los apoyos de
una estructura se manifiestan en la direcci+n de los mo"imientos restrin!idos. sto se
puede apreciar con claridad en los si!uientes esquemas de apoyos que se utilizan
para restrin!ir el mo"imiento de los cuerpos rí!idos en el plano.a! "poos de primer orden
Son apoyos que !eneran una reacci+n de direcci+n conocida. Dún cuando el
sentido de la reacci+n es desconocido, puede ser supuesto arbitrariamente. l si!no de
la soluci+n obtenida nos indicar si la suposici+n fue correcta o no
• n los si!uientes apoyos se "e claramente que el mo"imiento es restrin!ido en
la direcci+n perpendicular a las !uías o superficies de apoyo, por lo que la
reacci+n se !enerar justamente en esa direcci+n.
12

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 13/48
i!ura (.)7
• Si el cuerpo se apoya sobre una superficie sin fricci+n 'lisa*, se !enera una
reacci+n perpendicular a dic-a superficie
i!ura (.))
• n el caso de un cable, dado que solo puede estar tensionado, la reacci+n que
se !enera tiene direcci+n y sentido conocidos.
i!ura (.)/
• n el caso de la biela 'elemento muy del!ado, articulado en sus e1tremos y de
peso despreciable* se !enerar una reacci+n en la direcci+n a1ial de la biela 'a
lo lar!o de su eje*, pero su no sentido puede determinarse a priori, por lo que
deber ser supuesto arbitrariamente.
i!ura (.)(
• n el caso de un resorte elstico y lineal, se !enera una reacci+n en la direcci+n
a1ial del resorte y su sentido depender estrictamente si el resorte est estirado
o comprimido.
i!ura (.)2
13
-
-

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 14/48
• n los casos de la corredera 'deslizadera o collarín* y el pasador en ranura lisa
'casos mecnicamente equi"alentes* se !enera una reacci+n de direcci+n
perpendicular a la direcci+n de la ranura y sentido arbitrario.
i!ura (.)3
b! "poos de segundo orden
• Drticulaci+n fija. &as reacciones que se !enera es una fuerza de direcci+n y
sentido desconocido. Gecnicamente podemos reemplazar dic-a fuerza de
direcci+n desconocida por dos fuerzas perpendiculares a las que podemos
suponer sus sentidos.
i!ura (.)5
• Superficie ru!osa. Henera una reacci+n perpendicular a la superficie en contacto
y otra en la direcci+n del deslizamiento impedido por la fricci+n, la que se
denomina fuerza de fricci+n o rozamiento.
i!ura (.)>
14

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 15/48
• mpotramiento mono deslizante. Se trata de un apoyo que restrin!e una
direcci+n de mo"imiento y el !iro del cuerpo rí!ido. Consecuentemente se
!eneran como reacciones, una fuerza de direcci+n conocida y un momento. n
ambos casos es sentido es desconocido y se tiene que suponerlos
i!ura (.)?
c! "poos de tercer orden
• mpotramiento. s un apoyo que restrin!e toda posibilidad de mo"imiento en el
plano. Consecuentemente se !eneran una fuerza de direcci+n desconocida 'que
puede ser reemplazada por dos componentes perpendiculares de direcciones
conocidas ms un momento
i!ura (.)@
3.3.2.2 Reacciones en vínculos internos de estructuras planas Dl i!ual que en el caso de los apoyos, las reacciones entre elementos de un
sistema se presenta en la direcci+n de los desplazamientos restrin!idos.
1

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 16/48
i!ura (./73.3.2.3. "lgunas notas sobre el equilibrio en el plano
Bemos "isto que para el caso de sistemas coplanarios, el equilibrio se puede
e1presar mediante las si!uientes tres ecuaciones escalares:
1#

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 17/48
∑ F x=0 ,∑ F y=0 ,∑ F z=0
Sin embar!o, alternati"amente podemos reemplazar al!unas de ellas por otras, sin
que ello si!nifique que las nue"as ecuaciones nos permitan tener ms inc+!nitas en el
sistema. D continuaci+n mencionaremos al!unas de ellas.∑ F #=0 ,∑ M P=0 ,∑ M $=0
donde # es una direcci+n cualquiera del plano y no debe ser paralela a la direcci+n
PQ. P y Q son dos puntos cualesquiera del plano.
∑ M P=0 ,∑ M $=0 ,∑ M %=0 ,
donde P , Q y S no deben estar alineados
Ejemplo de aplicación 3.# &a barra uniforme de ?7 N de peso est apoya sobre las superficies lisas "ertical y
-orizontal y el cable DC. Calcular la tensi+n en el cable y las reacciones en D y ;.
$lantear la soluci+n usando dos ecuaciones de momento y una ecuaci+n de fuerza.
i!ura (./)
). 6samos el modelo de cuerpo rí!ido 'barra D;*/. l dia!rama de cuerpo libre '0C&* y sistema de referencia
1'

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 18/48
i!ura (.//
(. Sobre la barra D; actúan cuatro fuerzas: su peso W , la fuerza "ertical A , la
fuerza -orizontal B y la tensi+n en el cable T y sus e1presiones "ectoriales son:
W = (0,−80) N , A=(0, A ) ,B=(B ,0 )
&
−cos&,sen¿=(−3T
√ 13, 2T
√ 13 )T =T ¿
0atos del problema: W y las direcciones y sentidos de A , B y T , y las
inc+!nitas: los m+dulos de A ,B y T representados por A ,B y T .
2. &as ecuaciones "ectoriales de equilibrio se escriben como:
R=W + A+B+T =0 ; M P=0
$uesto que se trata un problema de equilibrio en el plano, estas ecuaciones
"ectoriales son equi"alentes a las tres ecuaciones escalares si!uientes:
∑ M A=0=4 B−80( 32)=0 (2)
∑ M E=0=(−3T
√ 13 ) (4 )+80( 32 )=0 (3 )
1
N
(1

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 19/48
∑ F y=0= A+ 2T
√ 13−80=0(4 )
3. 4esoluci+n de las ecuaciones de equilibrio
0e la ecuaci+n '/* obtenemosB=30 N (5)
0e la ecuaci+n '(*, obtenemosT =36.1 N (6)
4eemplazando el "alor de en la '2* obtenemos: A=60 N (7)
5. 6sando las ecs. ')* y las soluciones '3*, '5* y '>*, -allamos las reacciones y la fuerza
en el cable en forma "ectorial
A= (0,60 ) N , B=(30,0 ) N ,T =36.1( −3
√ 13, 2
√ 13 ) N
3.#. $rado de libertad de un cuerpo rígido
6n cuerpo rí!ido est completamente restrin!ido si es que no es posible que
efectúe al!ún tipo de mo"imiento. S+lo bajo esa condici+n un cuerpo rí!ido 'o un
sistema de cuerpos rí!idos* podr permanecer en equilibrio si sobre %l actúa un
sistema de fuerzas. Dsí, para que un cuerpo rí!ido no se mue"a al soportar un sistema de fuerzas,
deber estar restrin!ido en todas sus posibilidades de mo"imiento. 0ic-as
posibilidades de mo"imiento se denominan grados de libertad !"#$%. &a restricci+n se
efectúa colocando apoyos o soportes, los cuales deben estar eficazmente dispuestos.n el plano, un cuerpo que est libre de toda restricci+n tendr tres !rados de
libertad, ya que sus posibilidades de mo"imiento sern 'asumiendo que se encuentra
en el plano 1y*:E raslaci+n en el eje 1.E raslaci+n en el eje y.E 4otaci+n alrededor del eje z.
n el espacio, un cuerpo que est libre de toda restricci+n tendr seis !rados de
libertad, ya que sus posibilidades de mo"imiento sern:E raslaci+n en el eje 1.E raslaci+n en el eje y.E raslaci+n en el eje z.
1,

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 20/48
FF
R1 R2 R2R1
E 4otaci+n
alrededor
del eje 1.E 4otaci+n
alrededor del eje y.E 4otaci+n alrededor del eje z.
Conforme le "ayamos colocando restricciones de mo"imiento, el cuerpo ir
perdiendo !rados de libertad. n el caso de s+lidos que tienen restricciones de
mo"imiento, se define el !rado de libertad como:
"#$ = &'mero de posibilidades de mo(imiento ) &'mero de restricciones e*ternas
3.% Estabilidad determinación estática
n al!unas ocasiones, los soportes que se le aplican a un s+lido no son suficientes
para mantener el equilibrio y en otras, los apoyos son e1cesi"os y no podemos
despejar todas las inc+!nitas que aparecen en la resoluci+n de un problema. n estos
dos casos se dice que el s+lido es estticamente indeterminado.
a! &oportes 'mpropios
n al!unos casos los soportes o restricciones aplicadas a un s+lido lo mantienen en
equilibrio solo para al!unas condiciones de car!a, de modo que si estas cambian, el
equilibrio del sistema se pierde. n estos casos se dice que el s+lido es inestable y que
los soportes colocados son impropios.n problemas en el plano, los soportes impropios se producen en los
si!uientes casos:E Cuando los soportes solo pueden ejercer fuerzas paralelas entre sí 'fi!ura (./(*.
Se puede apreciar que para las condiciones de car!a de la fi!ura (./('a*, el s+lido
se encuentra en equilibrio, mientras que para las condiciones de car!a de la fi!ura
(./( 'b*, la componente -orizontal de la fuerza F no puede ser equilibrada.
'a* 'b*
20

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 21/48
F
P
R2R1
F
P
R2R1
i!ura (./(
E Cuando los soportes solo pueden ejercer fuerzas concurrentes 'fi!ura
(./2*.Se puede apreciar que para las condiciones de car!a de la fi!ura (./2'a*, el
s+lido se encuentra en equilibrio, mientras que para las condiciones de car!a dela fi!ura (./2'b*, la sumatoria de momentos respecto del punto P no podría ser
equilibrada.a* 'b*
i!ura (./2
n la fi!ura /./2('c*, e1iste la posibilidad que la barra en & 'D;C* !ire alrededor de
la articulaci+n +, pues las cuatro reacciones son concurrentes.
b! &oportes redundantes
n al!unos casos, los s+lidos tienen ms soportes o restricciones que los mínimos
necesarios para mantenerlos en equilibrio. Cuando esto ocurre se dice que el cuerpo
21
'c*

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 22/48
F
F
Ay
Ax
MA
F
F
Ay
Ax
MA
RB
tiene soportes redundantes y por consi!uiente no podremos despejar todas las
inc+!nitas que surjan en la resoluci+n del problema. n la fi!ura (./2'a* se muestra una "i!a empotrada en uno de sus e1tremos.
$odemos obser"ar que tiene tres ecuaciones de equilibrio posibles 'sumatoria de
fuerzas en 1, sumatoria de fuerzas en y, sumatoria de momentos* y tres inc+!nitas
'reacci+n -orizontal en D ' A x *, reacci+n "ertical en D ' Ay * y momento en D 'M A*, por
consi!uiente, ser posible resol"er el sistema. n la fi!ura (./2 'b* se muestra la misma "i!a empotrada en uno de sus e1tremos,
pero soportada por un rodillo en el otro. n esta caso tendremos las mismas tres
ecuaciones de equilibrio 'sumatoria de fuerzas en 1, sumatoria de fuerzas en y,
sumatoria de momentos*, pero se tendrían que despejar cuatro inc+!nitas 'reacci+n
-orizontal en D ' A x *, reacci+n "ertical en D ' Ay *, momento en D 'M A* y reacci+n en el
rodillo ; 'R B*, por lo que no ser posible despejar todas las inc+!nitas del sistema. 'a* 'b*
i!ura (./3
1isten t%cnicas para poder resol"er este tipo de situaciones, pero dic-os
m%todos escapan al alcance del curso de sttica y sern analizados en cursos
posteriores tales como la 4esistencia de Gateriales.
3.(. )uerpo rígido sometido a la acción de dos *uer+as
Si el sistema de fuerzas y momentos que actúa sobre un cuerpo equi"ale a dos
fuerzas actuando en puntos diferentes, el s+lido es un cuerpo de dos fuerzas 'fi!ura
(./3Ea*. Si el cuerpo est en equilibrio, la resultante y el momento en cualquier punto
arbitrario $ deben se nulas. n la fi!ura (./3 'b* asumiendo F’ I E F , tenemos que la
resultante R=0 pero el momento del par es diferente de cero, por lo tanto el sistema no
22

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 23/48
F’
F
F’ A B
F
A B
F
F’A B
est en equilibrio. Se deduce que el equilibrio ser posible si y solo si, las dos fuerzas
son i!uales y opuestas y tienen la misma recta de acci+n, fi!ura (./3'c*.
'a* 'b* 'c*
i!ura (./3
3., )uerpo sometido a la acción de tres *uer+as
Si el sistema de fuerzas y momentos que actúa sobre un cuerpo equi"ale a tres
fuerzas actuando en puntos diferentes, se dice que el s+lido es un cuerpo de tres
fuerzas. s posible demostrar que si un cuerpo de tres fuerzas est en equilibrio, las
fuerzas son coplanarias y adems, paralelas o concurrentes.
Ejemplo de aplicación 3.%6n disco liso de radio ,= 3- cm que pesa P= -- N, est sostenido se!ún se indica
en la fi!ura (./5 por el marco / de peso despreciable. l punto + se -alla conectado a
un muro "ertical mediante una articulaci+n, siendo 0 I (, J / la distancia que separa
sendas rectas -orizontales que pasan por + y por el centro del disco . Se pide:
a* Ballar la reacci+n en el apoyo D.
b* Ballar las reacciones en los puntos de contacto 2 4 y #.
i!ura (./5
23
%
$
A
D
a) b)

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 24/48
&olución
a* 4eacci+n sobre el marco en el soporte +
Consideremos el dia!rama de cuerpo libre del conjunto elemento G ms disco
'fi!ura b*. &as fuerzas e1ternas que actúan sobre este s+lido compuesto son el peso P , y las reacciones A y D . que ejerce sobre %l la pared en los puntos + y #.
l peso tiene direcci+n "ertical. &a superficie en # es lisa, por lo que la reacci+n
D es normal a la pared. &a direcci+n de la recta soporte de la reacci+n A est
determinada por el teorema de las tres fuerzas, que obli!a a que las tres fuerzas sean
concurrentes. 0e acuerdo al sistema de referencia adoptado las fuerzas son
P=(0,−200 ) N , A= A (c's&,sen& )=
(
A
√ 3.25
, 1.5 A
√ 3.25 ); D=(− D ,0)
tenemos como inc+!nitas los m+dulos de A y D representados por D y 0.
$lanteando la ecuaci+n de equilibrio de que la resultante de fuerzas debe ser nula
A + D + P=( A
√ 3.25, 1.5 A
√ 3.25 )+(− D ,0 )+(0,−200 )=(0,0,0)
0e la cual se pueden escribir las si!uientes ecuaciones escalares
{+→∑ F x :
A
√ 3.25− D=0
+↑∑ F y : 1.5 A√ 3.25−
200=0
4esol"iendo, obtenemos
A=200(√ 3.25
1.5=240.37 N y D=1333.333 N
n su forma "ectorial tenemos A= (650,133.33 ) N D=(−133.333,0) N
b! 4eacciones en los puntos de contacto ;, C y 0.
Consideramos a-ora el dia!rama de cuerpo libre del disco 'fi!ura*. odos los
contactos son lisos, por lo que las reacciones ; y C son normales a las superficies de
contacto. 6sando los ejes indicados las fuerzas son D=(−133.333,0 ) N , B=( B ,0 ) ,C =(0,C ) , P=(0,−200)
$ara el equilibrio, la resultante debe ser nula
24
8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 25/48
B+C + D+ P=0
(B ,0 )+ (0,C )+ (−133.33,0 )+(0,−200 )=(0,0,0)
0e la cual se obtienen las si!uientes ecuaciones escalares
+→∑ F x :B−133.33=0
+↑∑ F y :C −200=0
4esol"iendo -allamosB=133.33 N y C =200 N
Con estos resultados las reacciones en los puntos de contacto sonB=(133.33,0 ) N ,C =(0,200 ) N , D=(−133.333,0 ) N
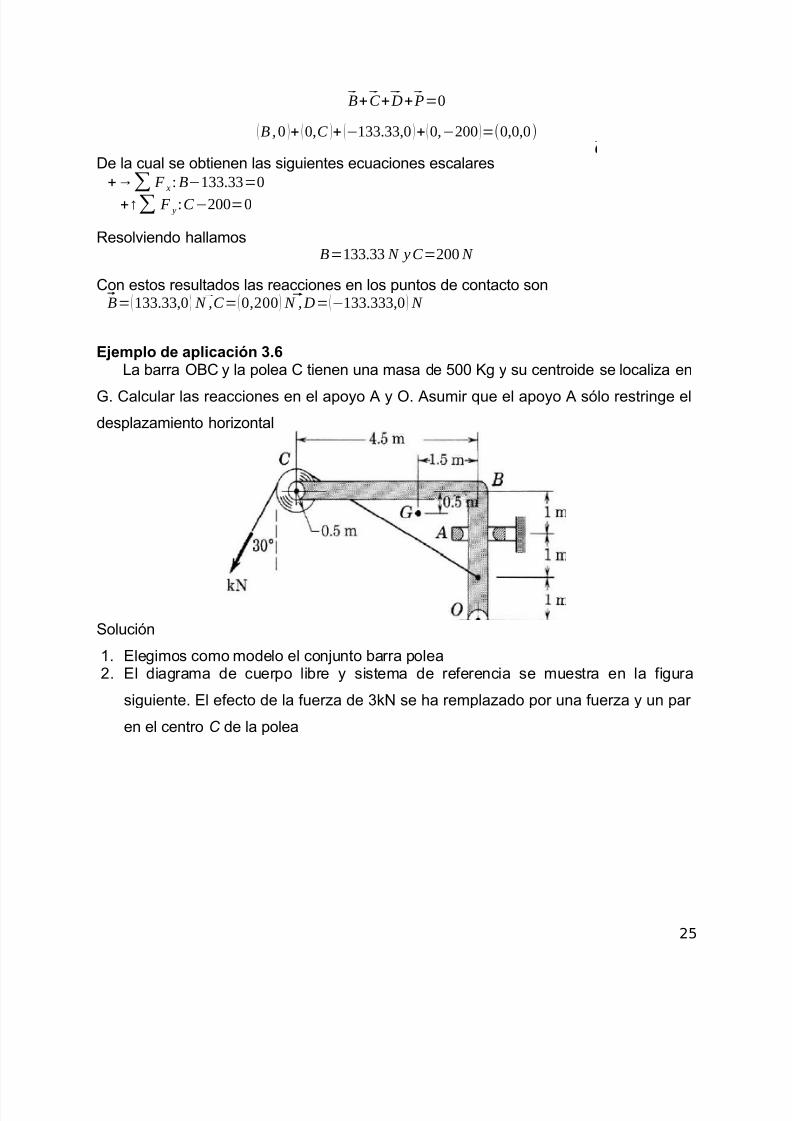
Ejemplo de aplicación 3.( &a barra K;C y la polea C tienen una masa de 377 L! y su centroide se localiza en
H. Calcular las reacciones en el apoyo D y K. Dsumir que el apoyo D s+lo restrin!e el
desplazamiento -orizontal
Soluci+n
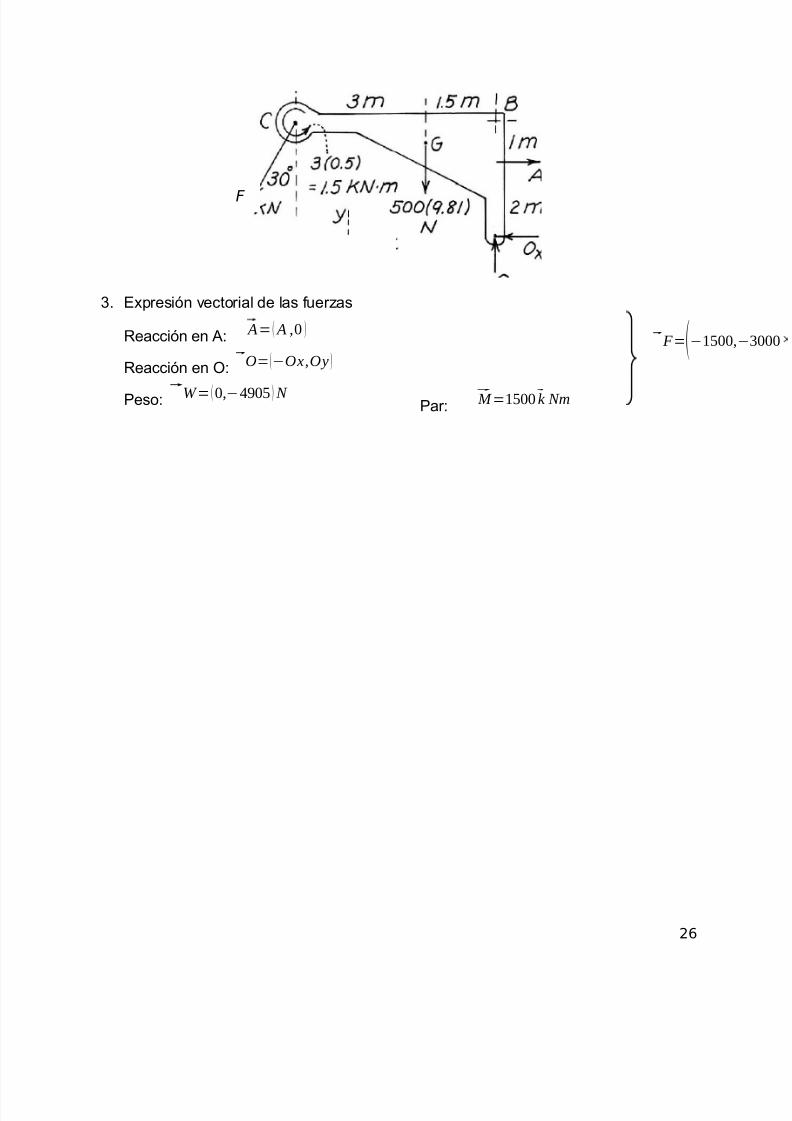
). le!imos como modelo el conjunto barra polea/. l dia!rama de cuerpo libre y sistema de referencia se muestra en la fi!ura
si!uiente. l efecto de la fuerza de (8N se -a remplazado por una fuerza y un par
en el centro 4 de la polea
2
8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 26/48
(. 1presi+n "ectorial de las fuerzas
4eacci+n en D: A= ( A ,0 )
4eacci+n en K:)=(−)x,)y )
$eso:
W = (0,−4905 ) N
F =(−1500,−
$ar: M =1500k Nm
2#
F

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 27/48
#. cuaciones de equilibrio: M
0=0 ,
que proporciona la si!uiente ecuaci+n escalar
+⟲∑ M 0=0:1500+1500 (3 )+3000(
√ 3
2
(4.5 )+4905 (1.5 )− A (2 )=0 '/*
R= A+)+W + F =0 ,
que conduce a las si!uientes ecuaciones escalares
+→∑ F x : A−)x−1500=0(3)
+↑∑ F y :)y−4905−3000(√ 3
2=0 (4)
%. Soluci+n delas ecuaciones de equilibrio0e la c. '/* obtenemos DI )/3/2 N
0e la c.'(* obtenemos )x I ))7/2 N
M de la c'2* obtenemos )y I >37( N
5. 6tilizando las cs.')* y los "alores de +, )x y )y , -allamos las reacciones
en forma "ectorial
A= (12524,0 ) N y)=(−11024,7503) N
Ejemplo de aplicación 3., Sobre la barra D;C actúan la fuerza de /.3 8N y un par de 2 8Nm, tal como se
muestra en la fi!ura. 0eterminar las reacciones en los apoyos D, ; y C necesarias
para el equilibrio. l soporte D es una corredera lisa y la cone1i+n en C0 es una biela.
). omamos como modelo el de s+lido rí!ido en el plano 'barra D;C*/. 0ia!rama de cuerpo libre y sistema de referencia '"er fi!ura*

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 28/48
(. 1presi+n "ectorial de las fuerzas. &a direcci+n de la reacci+n en D ser
perpendicular al eje de la corredera y la fuerza ejercida en la cone1i+n C ser en la
direcci+n del eje de la biela C0, así tenemos
,eaccin en + A= A (√ 22 ,√ 2
2 ),eaccin en 2 B=(0,B )
F =2.5(−1
2,
Par M =−4.5k kNm

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 29/48
,eaccin en 4C =(−C ,0 )
2. cuaciones de equilibrio: enemos dos ecuaciones "ectoriales
R I A+B+C + F =0 y M C =0
0e M C =0 ,
obtenemos la si!uiente ecuaci+n escalar
+⟲∑ M C =0 :− A √ 2
2(10 )+ A
√ 2
2(3 )+2.5( √ 32 ) (6 )−
2.5
2(3)−4=0 '/*
y de R I 0 , que conducen a las si!uientes ecuaciones escalares
+→∑ F x : A √ 2
2−2.5( 12 )−C =0(3)
+↑∑ F y : A √ 2
2−2.5(√ 32 )+B=0 (4 )
3. Soluci+n delas ecuaciones de equilibrio
0e la c. '/* obtenemos DI ).75 8N0e la c.'(* obtenemos CI E7.37 8N
M de la c.'2* obtenemos B I ).)/ 8N
l si!no ne!ati"o de C indica que el sentido de la fuerza en C es -acia la derec-a,opuesto al indicado en el dia!rama de cuerpo libre
5. 6sando las cs. ')* y los "alores de A , B y C , e1presamos las reacciones
en su forma "ectorial
A=(0.75, 0.75)kN B=(0,1.12)kN C =(0.50,0)kN
Ejemplo de aplicación 3.- 6na barra rí!ida -omo!%nea con forma de 6 in"ertida, de !rosor despreciable,
anc-ura 7- cm y peso Q, se -alla en reposo con sus e1tremos D y ; apoyados sobreel suelo. n el interior de la citada "arilla -ay dos discos id%nticos entre sí,
-omo!%neos, de radio (7 cm y de peso (77 N cada uno, los cuales estn apoyados en
equilibrio del modo que se indica en la fi!ura. Sabiendo que todos los contactos entre
cuerpos 'puntos + 2 4 # y 9 * son lisos, se pide:a* 0ibujar los dia!ramas de cuerpo libre de la barra y de cada uno de los discos.

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 30/48
b* 0eterminar el peso mínimo Qmín que -a de tener la barra para que permanezca
en equilibrio sin "olcar Soluci+n
a* 0ia!ramas de cuerpo libre. i!uras b*, c* y d*
C
E
/
E
DC
!" " !
4
300
d)c)
a) b)
,0,0
30
8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 31/48
b* $eso mínimo de la barra min para que esta no "uelque
Problemas propuestos
). l peso de )77 lb de la placa rectan!ular en la fi!ura actúa en su punto medio.
0etermine las reacciones ejercidas sobre la placa en ; y en C.

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 32/48
/. &a barra -orizontal mostrada tiene una masa de )7 8!. Su peso actúa en el punto
medio, y est soportada por un soporte de rodillo en + y por el cable 24 . 6se el
-ec-o de que la barra es un miembro de tres fuerzas para determinar el n!ulo α , la
tensi+n en el cable 24 y la ma!nitud de la reacci+n en +.
(. &os enlaces de peso despreciable DDO, C;O y el apoyo de resorte ;; O soportan la
barra rí!ida D;. 0eterminar las fuerzas a1iales en los enlaces DDO y C;O indicando
si estn en tracci+n o compresi+n. 0etermine tambi%n la deformaci+n en el resorte
;;O y su lon!itud no deformada.
2. $ara el cuerpo rí!ido en forma de !+24#% sostenida por dos barras de peso
despreciable 'CCO y 00O* y el resorte 'DD O*, determinar el ran!o de "ariaci+n de la
distancia “y: para la cual las bielas 'CCO y 00O* trabajan a tracci+n

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 33/48
3.- Equilibrio en tres dimensiones
Como ya lo -emos e1plicado antes, para que un cuerpo rí!ido, sobre el que actúa
un sistema espacial de fuerzas, se encuentre en equilibrio deben cumplirse las
ecuaciones "ectoriales '(.(* y '(.2* o las ecuaciones escalares '(.3* y '(.5* que las
"ol"emos a escribir:
R=∑i=1
n
F i=0 (3.3)
M P=0(3.4)
∑i=1
n
F x=0 ,∑i=1
n
F y=0 ,∑i=1
n
F z=0(3.5)
∑i=1
n
M x=0 ,∑i=1
n
M y=0 ,∑i=1
n
M z=0(3.6)
3.-.1 Diagrama de cuerpo libre. Reacciones en los apoos
$ara dibujar correctamente los dia!ramas de cuerpo libre, es necesario conocer las
reacciones que ejercen los "ínculos de apoyo sobre el cuerpo rí!ido. &as fuerzas y los
momentos de par reacti"os que actúan en "arios tipos de apoyos y cone1iones, cuando
los miembros se "en en tres dimensiones, estn dados en la tabla si!uiente.

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 34/48

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 35/48
'Bibbeler /773*

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 36/48
Ejemplo de aplicación 3. Se tiene una barra rí!ida doblada en forma de “C# y contenida en el plano 1Ez, tal
como se obser"a en la fi!ura. sta barra se encuentra sometida a la acci+n de las
fuerzas que se indican y est soportada mediante una r+tula esf%rica en “7# y tres
bielas ), / y (. Se pide determinar las fuerzas en las bielas y la reacci+n en “K#.
Soluci+n). omamos como modelo el cuerpo rí!ido tridimensional 'barra*/. 0ia!rama de cuerpo libre. Dsumimos que todas las fuerzas en las bielas salen de la
barra rí!ida
(. 1presi+n "ectorial de las fuerzas
)=() x ,) y ) z ) ,
F 1= F 1 (0,1,0) ,
F 2= F 2
(0,
√ 2
2 ,−√ 2
2
), F 3= F 3
(0,
2√ 5
5 ,−√ 5
5
),
$1=$ (0,−1,0) , $
2=2$ (0,−1,0) ,$
3=$ (0,−1,0 )
2. cuaciones de equilibrio &a resultante debe ser nula
R=0 I)+ F
1+ F
2+ F
3+$
1+$
2+$
3=(0,0,0 )
(1

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 37/48
() x ,) y ,) z )+ F 1 (0,1,0)+ F
2(0, √ 22 ,−√ 2
2 )+ F 3(0, 2√ 55 ,−√ 5
5 )+$ (0,−1,0)+¿
+2$ (0,−1,0 )+$ (0,−1, 0 )=(0,0,0)
F!ualando componentes obtenemos las tres ecuaciones escalares si!uientes∑ F x=0:) x=0(2)
∑ F y=0 :) y+ F 1+ √ 2
2 F
2+2√ 5
5 F
3−4$=0(3)
∑ F z=0 :) z−√ 2
2 F
2−√ 5
5 F
3=0(4)
l momento respecto de cualquier punto, por ejemplo K, debe ser nulo
M )=∑)Ai ( F i=0
)A1( F 1+
)A2 F 2+
)A3 F 3+
)A4 (
$1+
)A5 (
$2+
)A6 (
$3=(0,0,0)
(0,0, ) ( F 1 (0,1,0)+( ,0, ) ( F
2(0, √ 22 ,−√ 2
2 )+(2 ,0,
2 )( F 3(0, 2√ 55 ,−√ 5
5 )+(0,0,
2 )( (0,−$ ,0 )+( ,0, )( (0,−2$ ,0)+(2 ,0,
2 )( (0,−$,0)=(0,0,0)
fectuando los productos "ectoriales obtenemos
F 1 (−1,0,0 )+ √ 2
2 F
2 (−1,1,1)+ √ 5
5 F
3 (−1,2,4 )+$
2(1,0,0 )+2$ (1,0,−1 )+¿
+$ (12 ,0−2)=(0,0,0)Simplificando tenemos
(− F 1−√ 2
2 F
2−√ 5
5 F
3+
$
2+2$+
$
2 )i+( √ 22 F 2+
2√ 5
5 F
3) j
+( √ 22 F 2
+4√ 5
5 F
3−2$−2$)k =(0,0,0)
F!ualando componentes obtenemos tres ecuaciones escalares adicionales
∑ M x=0 :− F 1−√ 2
2 F 2−
√ 5
5 F 3+3$=0 '3*
∑ M y=0: √ 2
2 F
2+2√ 5
5 F
3=0
'5*

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 38/48
∑ M z=0 : √ 2
2 F 2+
4√ 5
5 F 3−4$=0
'>*3. 4esol"iendo este sistema de ecuaciones -allamos
F 1=5$ , F 2=−5.657$ , F 3=4.472$ '?*
l "alor ne!ati"o de / si!nifica que la barra dos est trabajando en compresi+n y
no en tracci+n como se supuso en el 0C&. Sustituyendo estos "alores en las
ecuaciones '/*, '(* y '2* encontramos
) x=0,) y=−$ ,) z=−2$
'@*
&os "alores ne!ati"os de las componentes de la reacci+n) y ,) z indican que
actúan en la direcci+n ne!ati"a de los ejes coordenados
5. eniendo en cuenta las cs.')* y los resultados de las cs..'?* y '@* escribimos la
respuesta en forma "ectorial.
)=(0,−$ ,−2$ ) , F 1=5$ (0,1,0 ) , F 2=−5.657$(0, √ 22 ,−√ 2
2 ) , F 3=4.472$(0, 2√ 55 ,−√ 5
5 )
Ejemplo de aplicación 3.1/
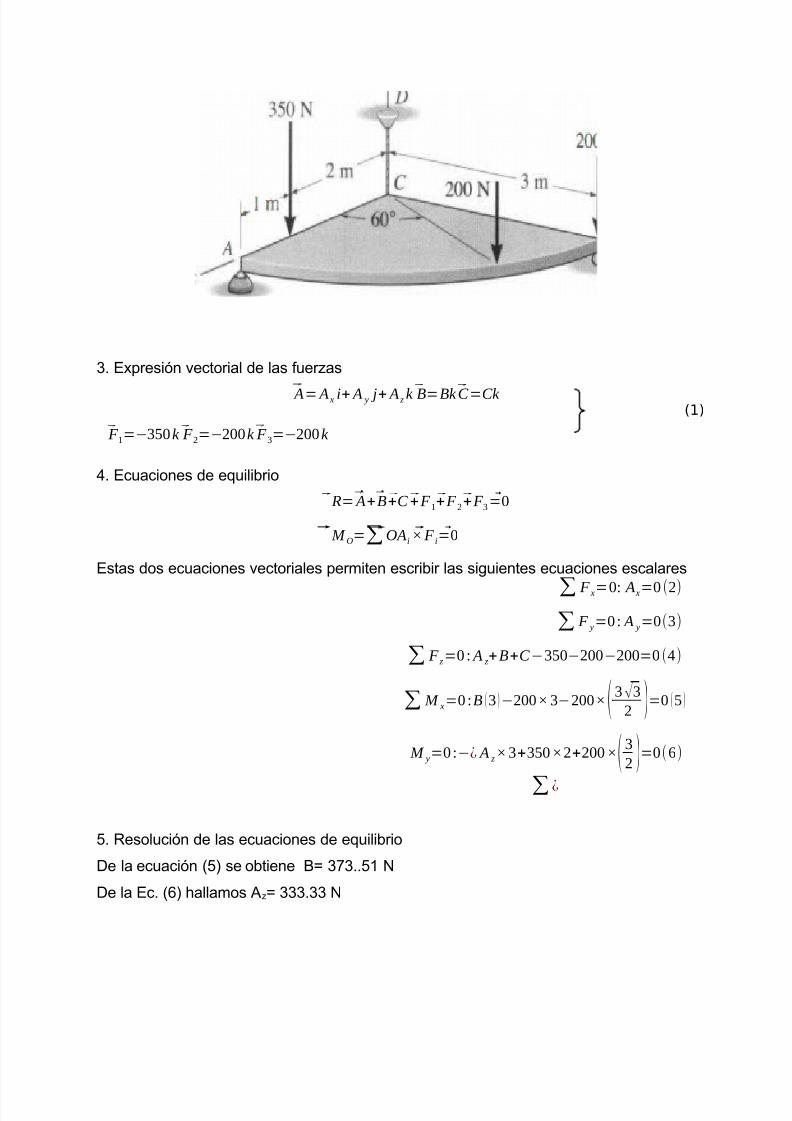
0eterminar a componente de fuerza que actúan sobre la r+tula esf%rica en D, la
reacci+n del rodillo ; y la tensi+n en la cuerda C0 necesarias para el equilibrio de la
placa de cuadrante circular
). Godelo. Cuerpo rí!ido tridimensional
/. 0ia!rama de cuerpo libre
8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 39/48
(. 1presi+n "ectorial de las fuerzas
A= A x i+ A y j+ A z k B=Bk C =Ck
F 1=−350k F
2=−200k F
3=−200k
2. cuaciones de equilibrio
R= A+B+C + F 1+ F
2+ F
3=0
M )=∑)Ai ( F i=0
stas dos ecuaciones "ectoriales permiten escribir las si!uientes ecuaciones escalares
∑ F x=0: A x=0 (2)
∑ F y=0: A y=0(3)
∑ F z=0 : A z+B+C −350−200−200=0 (4)
∑ M x=0 :B (3 )−200(3−200(( 3√ 32 )=0 (5 )
M y=0 :−¿ A z(3+350(2+200(( 32 )=0(6)
∑ ¿
3. 4esoluci+n de las ecuaciones de equilibrio
0e la ecuaci+n '3* se obtiene ;I (>(..3) N
0e la c. '5* -allamos DzI (((.(( N
(1)

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 40/48
reemplazando estos "alores en la ecuaci+n '2* obtenemos CI2(.25
5. inalmente escribimos las reacciones en forma "ectorial
A=333.33 k B=373.51k C =43.46k
Ejemplo de aplicación 3.11 6n cuerpo rí!ido est apoyado en el suelo mediante seis barras, dispuestas como
en la fi!ura. Calcúlese las fuerzas en las barras, o sea las reacciones de los apoyos,
pro"ocados por la fuerza $.
y
$ ;
0
P D
z
). omamos como modelo el cuerpo rí!ido tridimensional 'paralelepípedo rectan!ular*/. 0ia!rama de cuerpo libre. Dsumimos el sentido de las fuerzas en las barras saliendo
del paralelepípedo
(. cuaciones de equilibrioF!ualando a cero la suma de momentos alrededor de los ejes D;, y los ejes "erticales
que pasan por D y ; y 0, se obtiene
∑ M AB=0:− Pc+ N 1*=0→N
1=
Pc
*
C

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 41/48
∑ M z A=0 : N 2=0
∑ M zB=0 :− N 4c's+ ( )+ P ( )=0→ N 4=
P
c's+
∑ M
z
D=0 : N 6
c's=0→N 6
=0
F!ualando a cero la suma de momentos respecto del eje D0, encontramos
∑ M AD=0:− N 1− N
3=0→ N
3=− N
1=− Pc
*
inalmente i!ualando a cero sumando fuerzas en la direcci+n del eje P, tendremos
∑ F - =0:− P
c's+ sen+ − F
5=0→ F
5=− P.n+
Ejemplo de aplicación 3.12
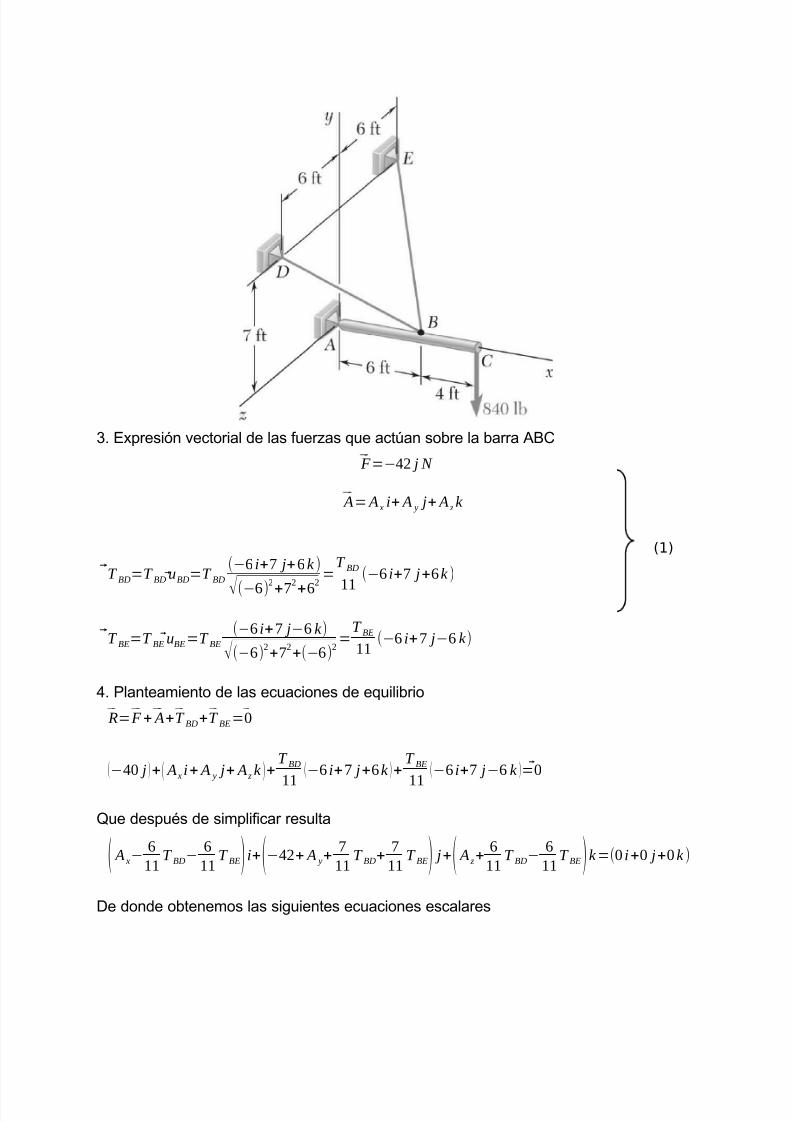
&a barra D;C est sostenida mediante una r+tula esf%rica en el apoyo D y los
cables ;0 y ;, y sometida a una fuerza de 27 8N tal como se muestra en la fi!ura.
0eterminar la tensi+n en cada cable y la reacci+n en el apoyo D.
). omamos como modelo el cuerpo rí!ido tridimensional 'barra D;C*/. 0ia!rama de cuerpo libre. Dsumimos el sentido de las componentes de la reacci+n
en D en las direcciones positi"as del sistema de referencia
8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 42/48
(. 1presi+n "ectorial de las fuerzas que actúan sobre la barra D;C
F =−42 j N
A= A x i+ A y j+ A z k
T BD=T BD #BD=T BD
(−6 i+7 j+6k )
√ (−6)2
+72
+62=
T BD
11
(−6 i+7 j+6k )
T BE=T BE #BE=T BE
(−6 i+7 j−6 k )
√ (−6)2+72+(−6)2=
T BE
11(−6 i+7 j−6 k )
2. $lanteamiento de las ecuaciones de equilibrio
R= F + A+T BD+T BE=0
(−40 j )+( A x i+ A y j+ A z k )+T BD
11
(−6 i+7 j+6k )+T BE
11
(−6 i+7 j−6 k )=0
ue despu%s de simplificar resulta
( A x− 6
11T BD−
6
11T BE) i+(−42+ A y+
7
11T BD+
7
11T BE) j+( A z+
6
11T BD−
6
11T BE)k =(0 i+0 j+0k )
0e donde obtenemos las si!uientes ecuaciones escalares
(1)

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 43/48
A x−6T BD
11−
6T BE
11=0(2)
−42+ A y+7T BD
11+7T BE
11=0(3)
A z+6T BD
11−
6T BE
11=0(4)
M A=∑/i( F i= AC ( F + AB(T BD+ AB (T BE=0
10 i ( (−40 j )+6i (T BD
11(−6 i+7 j+6k )+6 i (
T BE
11(−6 i+7 j−6k )=0
fectuando los productos "ectoriales y a!rupando t%rminos obtenemos
(−36T BD
11+36T BE
11 ) j+(−420+ 42T BD
11+42T BE
11 )k =0
ue conducen a las si!uientes ecuaciones escalares
−36T BD
11+36T BE
11=0 (5)
−420+42T BD
11+42T BE
11=0(6)
3. 4esoluci+n de las ecuaciones de equilibrio
0e la ecuaci+n '3* :T BD=T BE
$or lo tanto de la c. '5* se obtieneT BD=T BE=55kN
4eemplazando estos "alores en las cs.'(* y '2* obtenemos A y=−28
8N,
A z=0
Sustituyendo los "alores deT BD y
T BE en la c.'/* obtenemos A x=60
8N
5. inalmente la reacci+n en D y la tensi+n en los cables en forma "ectorial son:
A= (60i−28 j ) kN , T BD=(−30 i+35 j+30k ) kN ,
T BE=(−30 i+35 j−30k ) kN

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 44/48
$roblemas propuestos
). Sobre un plano inclinado rectan!ular liso D;C0, situado bajo el n!ulo de (7 o al
-orizonte, est una car!a de peso $. &a car!a se mantiene en equilibrio por medio de
dos cables i!uales en lon!itud D y ;, que son recíprocamente perpendiculares,
estn situados sobre el plano inclinado y sujetados a este en los puntos D y ;.
0eterminar las reacciones de los cables y del plano inclinado. &as dimensiones de la
car!a se desprecian
/. 6na barra sin peso se une a los collarines ; y C, que pueden mo"erse libremente a
lo lar!o de las "arillas "erticales, Si la superficie de contacto en D es sin fricci+n, -allar
las reacciones en D, ; y C

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 45/48
(. &a estructura D;C0 se sostiene mediante tres cables y un apoyo de r+tula en D.
Cuando a I )37 mm, determine la tensi+n en cada cable y la reacci+n en D.
2. &os cojinetes en D, ; y C no !eneran pares sobre la barra ni fuerzas en la direcci+n
del eje de %sta. 0etermina las reacciones en los cojinetes.

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 46/48
3. 6na placa rí!ida plana en posici+n -orizontal se encuentra sometida a la acci+n de
las fuerzas que se indican y es soportada mediante seis bielas, tal como se muestra en
la fi!ura. Se pide determinar las fuerzas en las seis bielas. 0ato QI ?77 N
5. &a pluma li"iana en n!ulo recto que soporta al cilindro de 277 L! de masa, est
sujeta por tres cables y una r+tula K fija al plano "ertical 1Ey. Ballar la reacci+n en K ylas tensiones en los cables

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 47/48
s un error soportar una puerta usando una sola bisa!ra ya que %sta debe
desarrollar una fuerza 4 y para sostener el peso ; de la puerta y un momento de par /
para resistir el momento de ; , esto es, / = ;d . Si en "ez de esto se usan dos
bisa!ras alineadas apropiadamente, entonces el peso es tomado por ambas bisa!ras,
Dy = ;y I Q, y el momento de la puerta es resistido por las dos fuerzas en las bisa!ras
9 * y <9 *. stas fuerzas forman un par, tal que 9 * d = ;d . n otras palabras, nin!ún
momento de par ser !enerado por las bisa!ras sobre la puerta siempre que est%n
alineadas apropiadamente. n "ez de ello, las fuerzas 9 * y <9 * resisten la rotaci+n
causada por ; .

8/20/2019 Cap 3 Estatica 2015 II 1
http://slidepdf.com/reader/full/cap-3-estatica-2015-ii-1 48/48
















![Cap II Estatica de Fluidos[1]](https://static.fdocuments.ec/doc/165x107/563db9f8550346aa9aa18dc3/cap-ii-estatica-de-fluidos1.jpg)