Ayudantia_RII (1).pdf
14
Ayudantías Mecánica Racional II ♦ Univerdidad Austral de Chile Facultad de Ciencias de la Ingeniería Mecánica Racional II Dinámica DMIL 233 Ayudante Johan Muñoz Profesor Sr. Rolando Ríos Rodríguez Valdivia, Chile 21 de abril de 2013
-
Upload
diego-mansilla -
Category
Documents
-
view
15 -
download
0
Transcript of Ayudantia_RII (1).pdf

AyudantíasMecánica Racional II
♦
Univerdidad Austral de ChileFacultad de Ciencias de la Ingeniería
Mecánica Racional II
Dinámica DMIL 233
Ayudante Johan Muñoz
Profesor Sr. Rolando Ríos Rodríguez
Valdivia, Chile21 de abril de 2013

Índice General
Índice General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Índice de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1. Cinemática Plana de Cuerpo Rígido . . . . . . . . . . . . . . . . . . . . . . . . . 41.1. Movimiento plano general (ejes en traslación) . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2. Movimiento plano general (ejes en rotación) . . . . . . . . . . . . . . . . . . . . . . . . 71.2.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2. Cinemática de Cuerpo Rígido en el Espacio . . . . . . . . . . . . . . . . . . . . 92.1. Rotación en torno a un punto fijo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.1.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2. Movimiento General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2

Índice de Figuras
1.1.1. Problema 5.141 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2. Problema 5.135 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.1. Problema 5.194 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1. Problema 7.21 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.1.2. Problema 7.21 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.1. Problema 7.45 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3

1 Cinemática Plana de Cuerpo Rígido
1.1 Movimiento plano general (ejes en traslación)
1.1.1. Problema 1
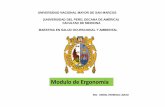
Fig. 1.1.1: Problema 5.141 del Meriam Vol. 3.
4

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 5
En el instante representado, la manivela OB tiene una velocidad angular horaria ω = 0, 8 (r/s) y seencuentra en posición horizontal. Hallar la correspondiente velocidad del rodillo guía A en su ranuraa 20.
Ecuación de Velocidad:
−→v A = −→v OB + −→v A/B
−→v A = −vA cos 20i − vA sin 20j (mm/s)−→v OB = −→ω OB × −→r OB
= −0, 8k × 250i = −200j (mm/s)−→v A/B = −→ω BA × −→r BA
= ωBAk × (−250i − 433j)= −250ωBAj + 433ωBAi (mm/s)
igualando componentes:
i : −vA cos 20 = 433ωBA
j : −vA sin 20 = −200 − 250ωBA
por lo tanto:
vA = 226 (mm/s)ωBA = −0, 5 (r/s)
1.1.2. Problema 2
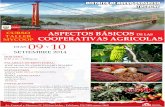
Fig. 1.1.2: Problema 5.135 del Meriam Vol. 3.
Para la posición indicada, hallar la aceleración de la placa si la barra de accionamiento AO tieneuna velocidad angular cte. ωOA = 4 (r/s) y es θ = 60 para las dos barras.
Ecuación de Velocidad:
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 6
−→v B = −→v OA + −→v B/A
−→v B = −→ω CB × −→r CB
= ωCBk × (−62, 5i + 108, 25j)= −62, 5ωCBj − 108, 25ωCBi (mm/s)
−→v A = −→ω OA × −→r OB
= −4k × (−125i + 216, 5j)= 500j + 866i (mm/s)
−→v B/A = −→ω AB × −→r AB
= ωABk × 300i
= 300ωABj (mm/s)
igualando componentes:
i : −108, 25ωCB = 866j : −62, 5ωCB = 500 + 300ωAB
por lo tanto, las velocidades angulares son:
ωCB = −8 (r/s)ωAB = 0 (r/s)
Ecuación de Aceleración:
−→a B = −→a OA + −→a B/A
−→a B = −→α CB × −→r CB + −→ω CB × (−→ω CB × −→r CB)= αCBk × (−62, 5i + 108, 25j) + −8k × (500j + 860i)= −62, 5αCBj − 108, 25αCBi + 4000i − 6928j (mm/s2)
−→a A =−→ω OA0 × −→r OB + −→ω OA × (−→ω OA × −→r OA)
= −4k × (500j + 866i)= 2000i − 3464j (mm/s2)
−→a B/A = −→α AB × −→r AB + −→ω AB × (−→ω AB × −→r AB)= αABk × 300i
= 300αABj (mm/s2)
igualando componentes:
i : −108, 25αCB + 4000 = 2000j : −62, 5αCB − 6928 = −3464 + 300αAB
por lo tanto, las aceleraciones angulares son:
αCB = 18, 47 (r/s2)αAB = −15, 4 (r/s2)
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 7
1.2 Movimiento plano general (ejes en rotación)
1.2.1. Problema 1
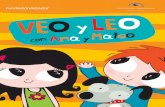
Fig. 1.2.1: Problema 5.194 del Meriam Vol. 3.
En la posición que se muestra la varilla DC gira en sentido antihorario a la velocidad constanteN = 2 r/s. Hallar la velocidad angula ω y la aceleración angular α de EBO en ese instante.
−→v A = −→v P + −→v rel
−→v A = −→ω CA × −→r CA
= 2k × −150i = −300j (mm/s)−→v P = −→ω OP × −→r OP
= ωOP k × −150j = 150ωOP i (mm/s)−→v rel = vrel cos 45i + vrel sin 45j
igualando componentes:
i : 0 = 150ωOP + vrel cos 45j : −300 = vrel sin 45
por lo tanto:
ωOP = ωEBO = 2 (r/s)vrel = −424, 26 (mm/s)
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 8
Ecuación de Aceleración:
−→a A = −→a P + 2−→ω × −→v rel + −→a rel
−→a A =−→α CA0 × −→r CA + −→ω CA × (−→ω CA × −→r CA)
= 2k × −300j = 600i (mm/s2)−→a P = −→α OP × −→r OP + −→ω OP × (−→ω OP × −→r OP )
= αOP k × −150j + 2k × 300i
= 150αOP i + 600j (mm/s2)2−→ω × −→v rel = 2 · 2k × (−300i − 300j)
= 1200i − 1200j (mm/s2)−→a rel = arel cos 45i + arel sin 45j
igualando componentes:
i : 600 = 150αOP + 1200 + arel cos 45j : 0 = 600 − 1200 + arel sin 45
por lo tanto:
arel = 600sin 45
≈ 848, 53 (mm/s2)
αOP = 8 (r/s2)
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

2 Cinemática de Cuerpo Rígido en el Espacio
2.1 Rotación en torno a un punto fijo
2.1.1. Problema 1
Fig. 2.1.1: Problema 7.21 del Meriam Vol. 3.
El disco de 120 mm de radio gira alrededor del eje z a la velocidad constante ωz = 20 r/s y elconjunto entero rota en torno al eje fijo x a la velocidad constante ωx = 10 r/s. Calcular los módulosde la velocidad −→v y de la aceleración −→a del punto B en el instante en que θ = 30
9

§ CAPÍTULO 2. CINEMÁTICA DE CUERPO RÍGIDO EN EL ESPACIO 10
2.1.2. Problema 2
Fig. 2.1.2: Problema 7.21 del Meriam Vol. 3.
El volante rueda sin deslizamiento siguiendo una circunferencia de radio R y da una vuelta completaalrededor del eje vertical y con una celeridad constante en el un tiempo τ . Determinar la expresiónvectorial de la aceleración angular α del volante.
−→Ω = 2π
τj
Sea c un punto del centro de la rueda
vc = ω · r
= Ω · R = 2π
τ· R
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 2. CINEMÁTICA DE CUERPO RÍGIDO EN EL ESPACIO 11
sea ω0 la velocidad angular con que gira en su propio eje la rueda
ω0 = vc
r= 2πR
rτ
=⇒ −→ω 0 = −2π
τ· R
rk
∴ −→ω =−→Ω + −→ω 0
= 2π
τj − 2π
τ· R
rk
−→α = −→Ω 0 + −→
ω 0
=−→Ω × −→ω 0
= 2π
τj × −2π
τ· R
rk
∴ −→α = −(
2π
τ
)2
· R
ri
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 2. CINEMÁTICA DE CUERPO RÍGIDO EN EL ESPACIO 12
2.2 Movimiento General
2.2.1. Problema 1
Fig. 2.2.1: Problema 7.45 del Meriam Vol. 3.
El disco de masa m y radio r gira en torno a su eje z con una velocidad angular constante p y lahorquilla en la que está montado rota alrededor del eje x que pasa por O con una velocidad angularconstante ω1. A la vez, todo el conjunto gira en torno al eje fijo Y que pasa por O con una velocidadangular constante ω2. Hallar la velocidad −→v y la aceleración −→a del punto A del borde del disco cuandopasa por la posición indicada, el cual el plano x-y del disco coincide con el plano x-y. Los ejes x-y-zson solidarios de la horquilla.
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 2. CINEMÁTICA DE CUERPO RÍGIDO EN EL ESPACIO 13
Cálculo pasando por B:
−→v A = −→v B + −→v A/B + −→v rel
−→v B = ω2j × bi = −bω2k−→v A/B = −ω1i × rj = −ω1rk
−→v rel = pk × rj = −pri
∴ −→v A−→v A−→v A = −pr i − (rω1 + bω2) k−pr i − (rω1 + bω2) k−pr i − (rω1 + bω2) k
Cálculo sin pasar por B:
−→v A = −→a A/O + −→v rel
−→v A/O = (ω2j − ω1i) × (bi + rj) = −(bω2 + rω1)k−→v rel = pk × rj = −pri
∴ −→v A−→v A−→v A = −pr i − (rω1 + bω2) k−pr i − (rω1 + bω2) k−pr i − (rω1 + bω2) k
−→a A = −→a B + −→v A/B + 2 · Ω × −→v rel + −→a rel
−→a B =−→α 2
0 × −→r B + −→ω B × (−→ω B × −→r B)= −ω2j × −bω2k
= −bω22i
−→v A/B = −→ω1 × −→r BA + −→ω 1 × (−→ω 1 × −→r BA)
= (ω2j × −ω1i) × rj − ω1i × (−ω1rk)= ω1ω2k × rj − ω2
1rj
= −ω1ω2ri − ω21rj
2 ·−→Ω × −→v rel = 2 · ω2j × −pri
= 2prω2k
−→a rel = −→p 0 × −→r + −→p × (−→p × −→r )
= pk × (−pri)= −p2rj
∴ −→a A−→a A−→a A = −ω2(bω2 + ω1r) − r(ω2
1 + p2)j + 2prω2k−ω2(bω2 + ω1r) − r(ω21 + p2)j + 2prω2k−ω2(bω2 + ω1r) − r(ω21 + p2)j + 2prω2k
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 2. CINEMÁTICA DE CUERPO RÍGIDO EN EL ESPACIO 14
Ayudantías de Mecánica Racional II,21 de abril de 2013
Universidad Austral de ChileJohan Muñoz


![Expo de_la_orina[1][1]---pdf](https://static.fdocuments.ec/doc/165x107/55b792ddbb61eb1d278b4754/expo-delaorina11-pdf.jpg)


![ETE_Muro_Costero_y_Caleta_Pescadores_Carelmapu[1] (1).pdf](https://static.fdocuments.ec/doc/165x107/563dbaf2550346aa9aa8f356/etemurocosteroycaletapescadorescarelmapu1-1pdf.jpg)



![INTA_PT_89_Manual_de_Fertilidad[1] (1).pdf](https://static.fdocuments.ec/doc/165x107/55cf9138550346f57b8ba58d/intapt89manualdefertilidad1-1pdf.jpg)