
Arcos
50
Arcos planos J. T. Celigüeta
-
Upload
jimmi-cari -
Category
Documents
-
view
11 -
download
0
description
Ing Civil
Transcript of Arcos

Arcos planos
J. T. Celigüeta
1
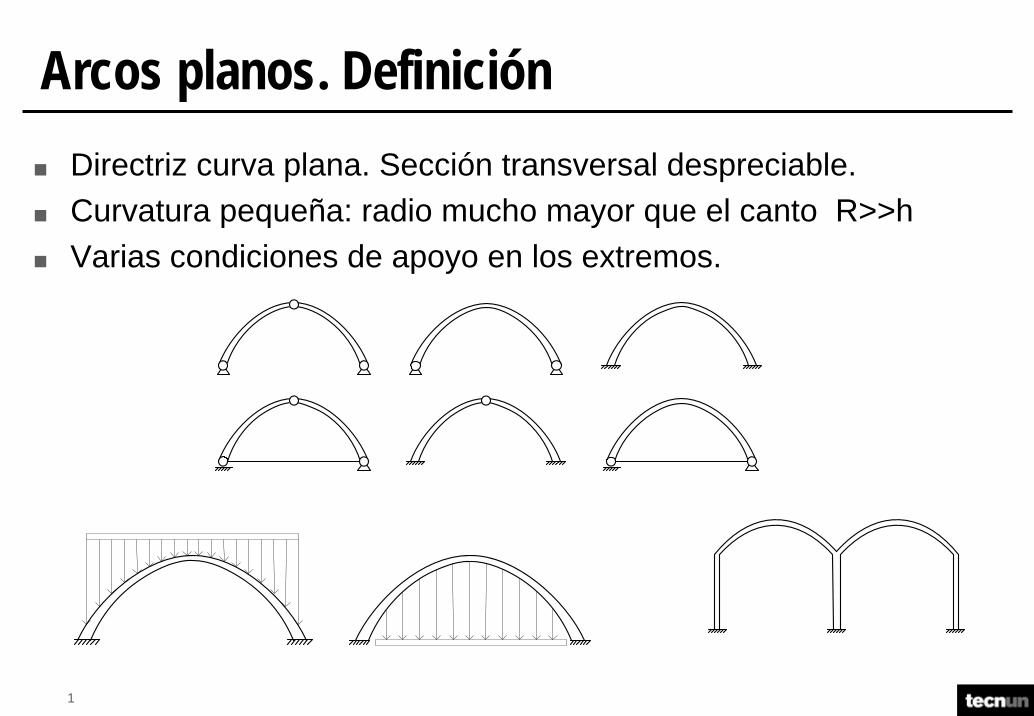
Arcos planos. DefiniciónDirectriz curva plana. Sección transversal despreciable.Curvatura pequeña: radio mucho mayor que el canto R>>hVarias condiciones de apoyo en los extremos.

2
Ejemplos
Puente romano (Córcega)
Puente del Milenio (Londres)Velódromo olímpico (Atenas)
Puente Michigan (Detroit) L=80 m
3
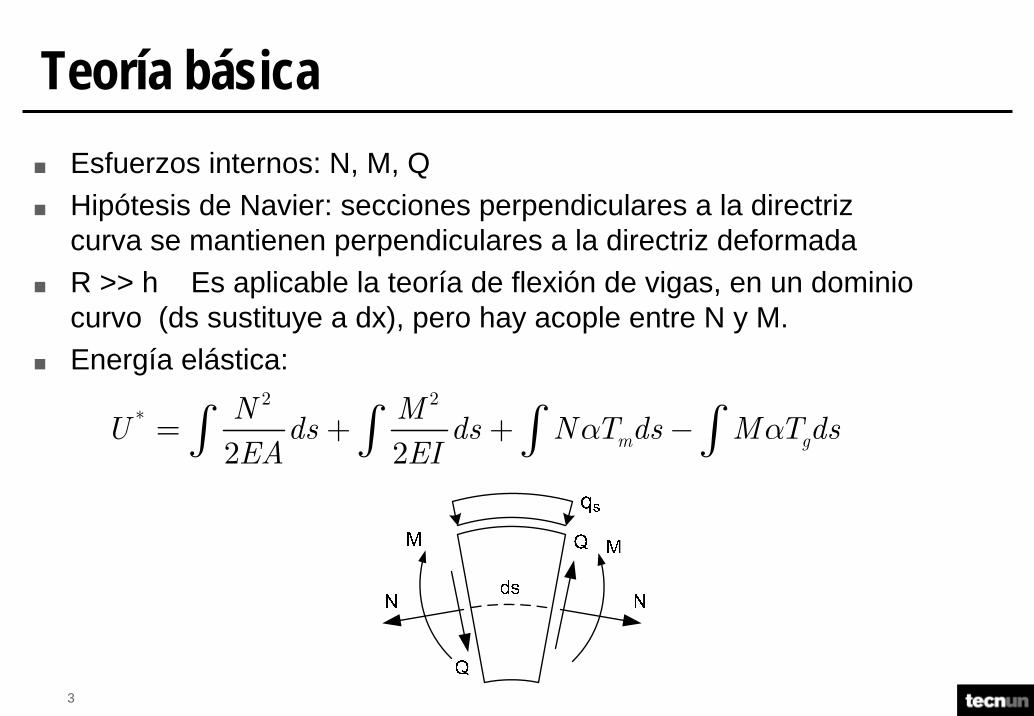
Teoría básicaEsfuerzos internos: N, M, QHipótesis de Navier: secciones perpendiculares a la directriz curva se mantienen perpendiculares a la directriz deformadaR >> h Es aplicable la teoría de flexión de vigas, en un dominio curvo (ds sustituye a dx), pero hay acople entre N y M.Energía elástica:
2 2*
2 2 m g
N MU ds ds N T ds M T ds
EA EIα α= + + −∫ ∫ ∫ ∫
4
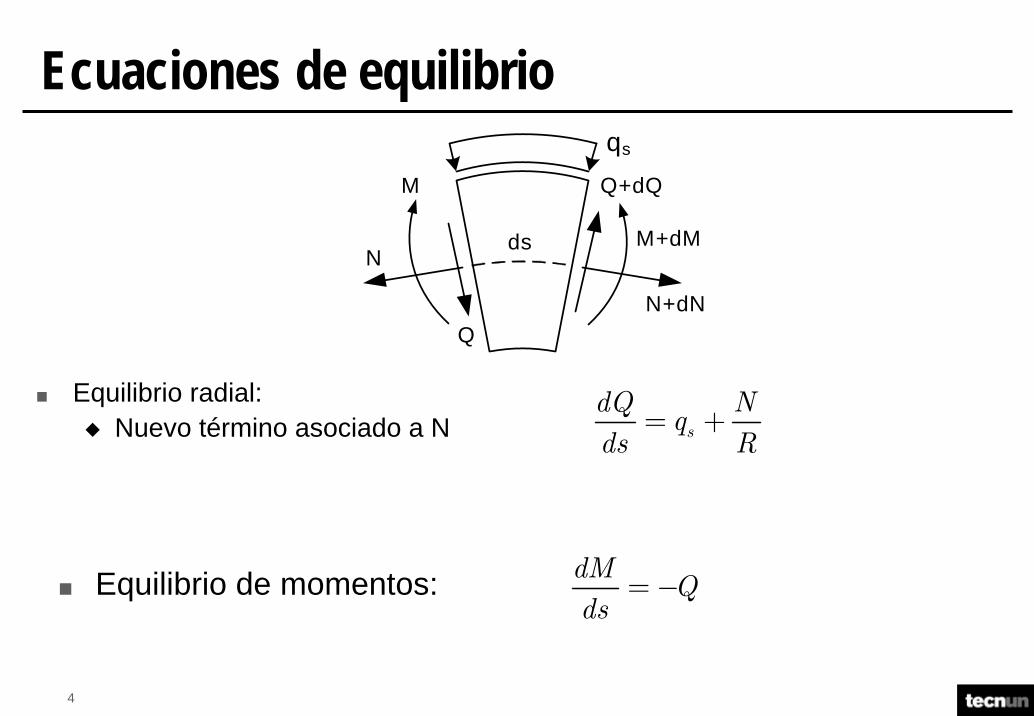
Ecuaciones de equilibrio
Equilibrio radial:Nuevo término asociado a N
Equilibrio de momentos:
s
dQ Nq
ds R= +
dMQ
ds=−
M
M+dMN
N+dNQ
Q+dQ
ds
qs

5
Arco triarticulado (I)Isostático
b=2 n=3 r=4 c=1
LA
h
fA
fB
LB
A
C
B
Se aplica la fórmula de los pórticos planos
6 b + r = 16 3 n + 3 b + c = 16 h=0

6
Arco triarticulado (II)
0extACx A y A AC f C L M− + + =
0extCBx B y B BC f C L M+ + =
LA
h
fA
fB
LB
A
CX
B
CY
CY
( ) 0ACAM =∑( ) 0BCBM =∑
CX, CY

7
Arco triarticulado simétrico. Carga uniforme (1)
q
AX
AY
CX
2 2
08 8 2x y x y
qL qL qLC C A A
f f=− = = =
Gran reacción horizontal en los apoyos (1/f)
q
L
f
Forma y(x) sin definir.
Por simetría: CY=0
8
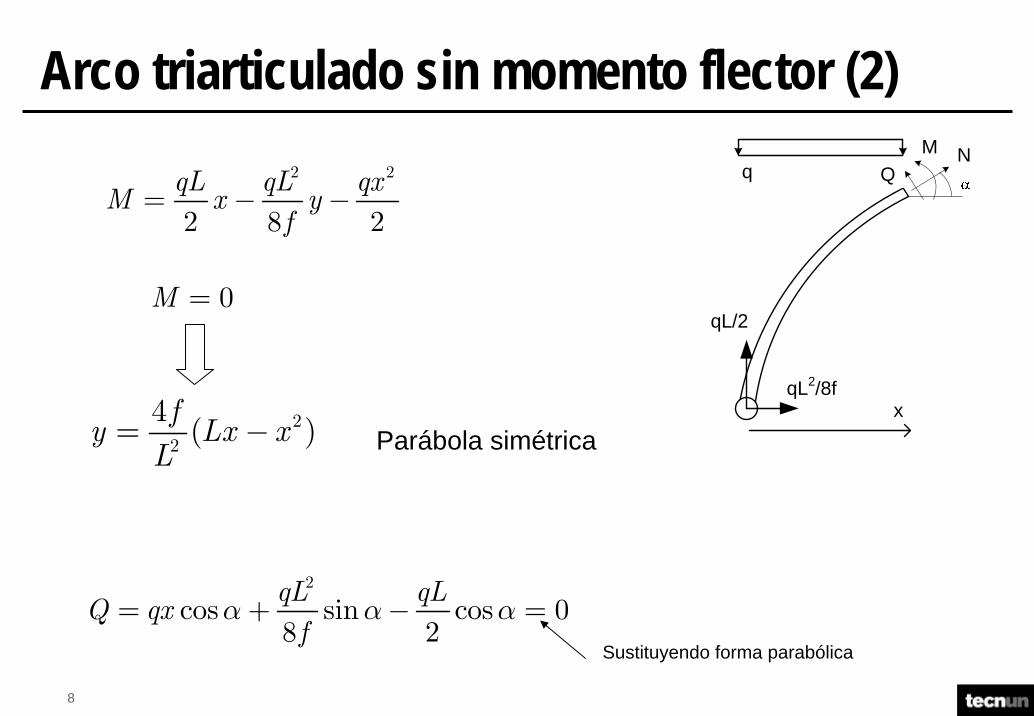
Arco triarticulado sin momento flector (2)NM
Q
x
q
qL/2
qL2/8f
2 2
2 8 2qL qL qx
M x yf
= − −
22
4( )f
y Lx xL
= − Parábola simétrica
0M =
2
cos sin cos 08 2qL qL
Q qxf
α α α= + − =Sustituyendo forma parabólica

9
Arco triarticulado sin momento flector (3)
2
8Clave
qLN
f=−
( )1/22 2168A
qLN L f
f=− +
2
8X
qLN
f=−
2Y
qLN qx= −
2
sin sin cos2 8qL qL
N qxf
α α α= − −1/24 2
2264 4
L LN q x xL
f
⎛ ⎞⎟⎜= − + − + ⎟⎜ ⎟⎜⎝ ⎠
Valor máximo en los apoyos
Es siempre de compresión
Proyección horizontal constante

10
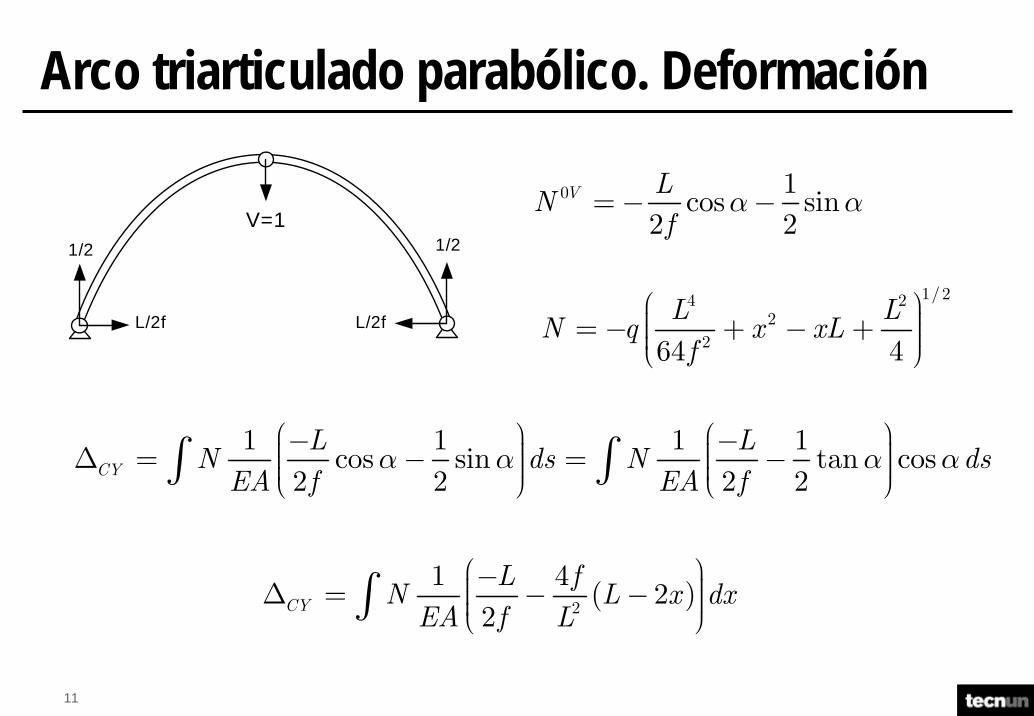
Arco triarticulado parabólico. Deformación
L/2f
1/2V=1
L/2f
1/2
0 1cos sin
2 2V L
Nf
α α=− −
0 0 01 1 1( 0)V V V
CY N N ds M M ds N N dsEA EI EA
Δ = + = =∫ ∫ ∫
0 1sin cos
2 2V L
Qf
α α= −
Fuerza virtual unitaria
11
Arco triarticulado parabólico. Deformación
L/2f
1/2V=1
L/2f
1/2
0 1cos sin
2 2V L
Nf
α α=− −
1 1 1 1cos sin tan cos
2 2 2 2CY
L LN ds N dsEA f EA f
α α α α⎛ ⎞ ⎛ ⎞− −⎟ ⎟⎜ ⎜Δ = − = −⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎝ ⎠ ⎝ ⎠∫ ∫
1/24 22
264 4L L
N q x xLf
⎛ ⎞⎟⎜= − + − + ⎟⎜ ⎟⎜⎝ ⎠
( )2
1 42
2CY
L fN L x dxEA f L
⎛ ⎞− ⎟⎜Δ = − − ⎟⎜ ⎟⎜⎝ ⎠∫

12
Simplificaciones habituales• Rigidez axial infinita. Se desprecia la energía debida al esfuerzo axial
00
00
seccos
1 1cos cos
II I
EI EI
αα
μ α μ α
= =
= = =
10
EAγ = =
• Momento de inercia variable según la ley de la secanteFlexibilidad a flexión μ variable según la ley coseno
Simplifica las integrales pues :
0 0( ) ( ) cos ( )f x ds f x ds f x dxμ μ α μ= =∫ ∫ ∫
I0 : momento de inercia en la clave
13
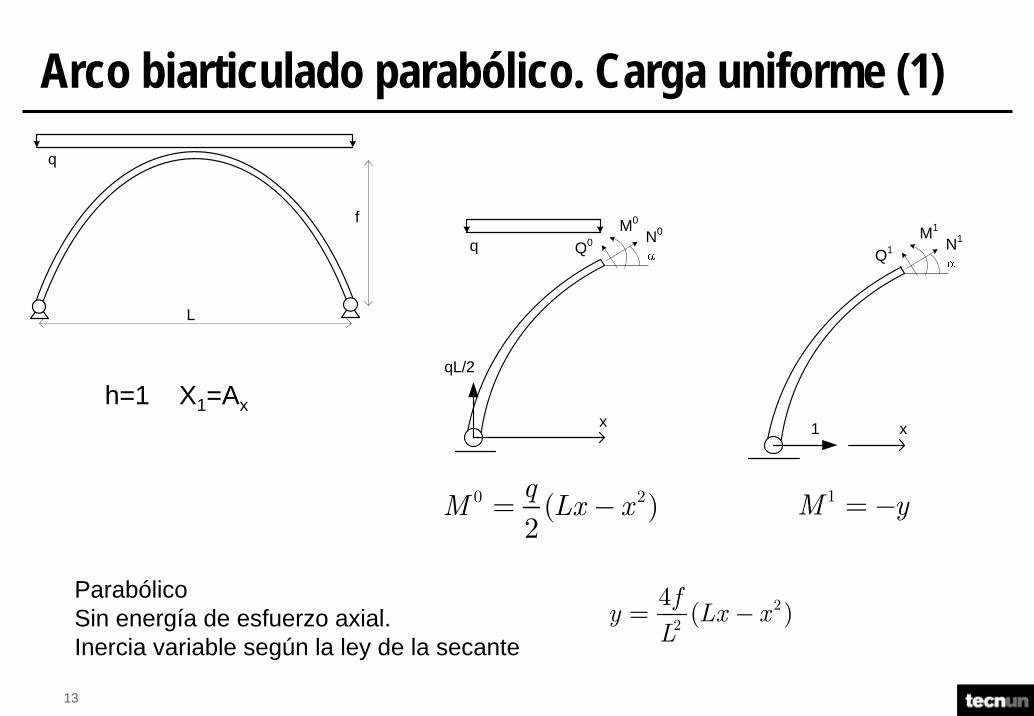
Arco biarticulado parabólico. Carga uniforme (1)q
L
fN0M0
Q0
x
q
qL/2
N1M1
Q1
x1
0 2( )2q
M Lx x= −
h=1 X1=Ax
1M y=−
ParabólicoSin energía de esfuerzo axial. Inercia variable según la ley de la secante
22
4( )f
y Lx xL
= −
14
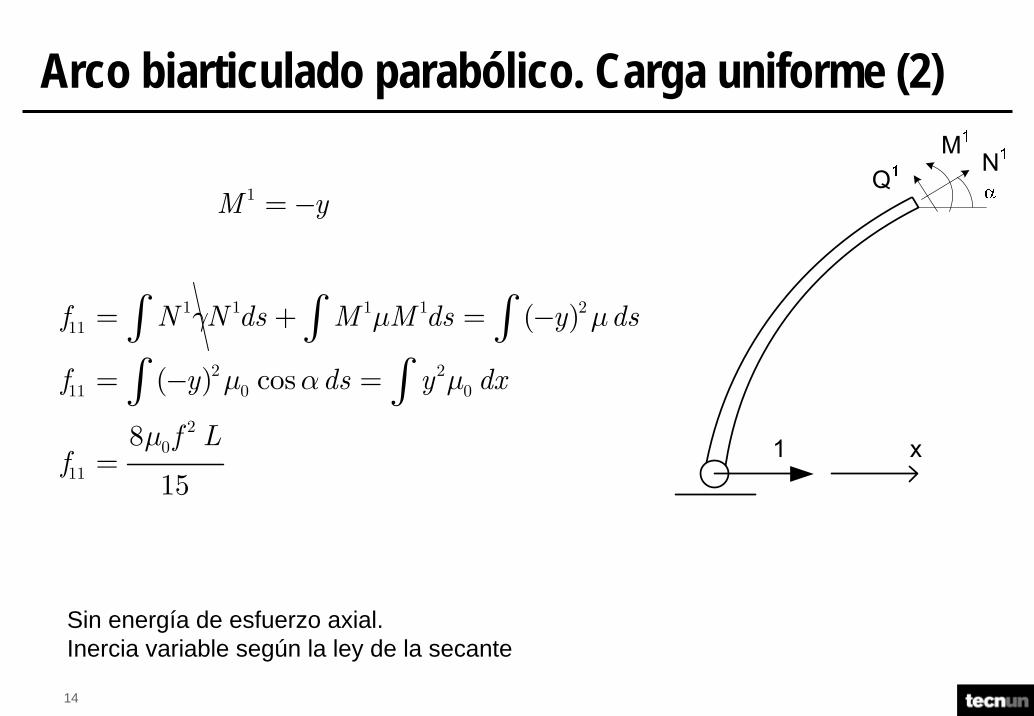
Arco biarticulado parabólico. Carga uniforme (2)
1M y=−
1 1 1 1 211
2 211 0 0
20
11
( )
( ) cos
8
15
f N N ds M M ds y ds
f y ds y dx
f Lf
γ μ μ
μ α μ
μ
= + = −
= − =
=
∫ ∫ ∫∫ ∫
Sin energía de esfuerzo axial. Inercia variable según la ley de la secante

15
Arco biarticulado parabólico. Carga uniforme (3)
( )
( )
0 1 0 11
21
21 0
30
1
( )2
cos ( )2
15
D N N ds M M ds
qD Lx x y ds
qD Lx x y ds
q f LD
γ μ
μ
μ α
μ
= − − =
= − − −
= − − −
=
∫ ∫∫
∫
21
11 8X
D qLA
f f= =
N0M0
Q0
x
q
qL/2
0 2( )2q
M Lx x= −

16
Arco biarticulado parabólico. Carga uniforme (4)
20 2 2
2
4( ) ( ) 02 8X
q f qLM M yA Lx x Lx x
L f= − = − − − =
Sin momento flector. Mismo comportamiento que el arco triarticulado
2
cos sin cos 08 2qL qL
Q qxf
α α α= + − =
Sustituyendo forma parabólica
N0M0
Q0
x
q
qL/2
N1M1
Q1
x1
0 2( )2q
M Lx x= −1M y=−
2
8X
qLA
f=
17
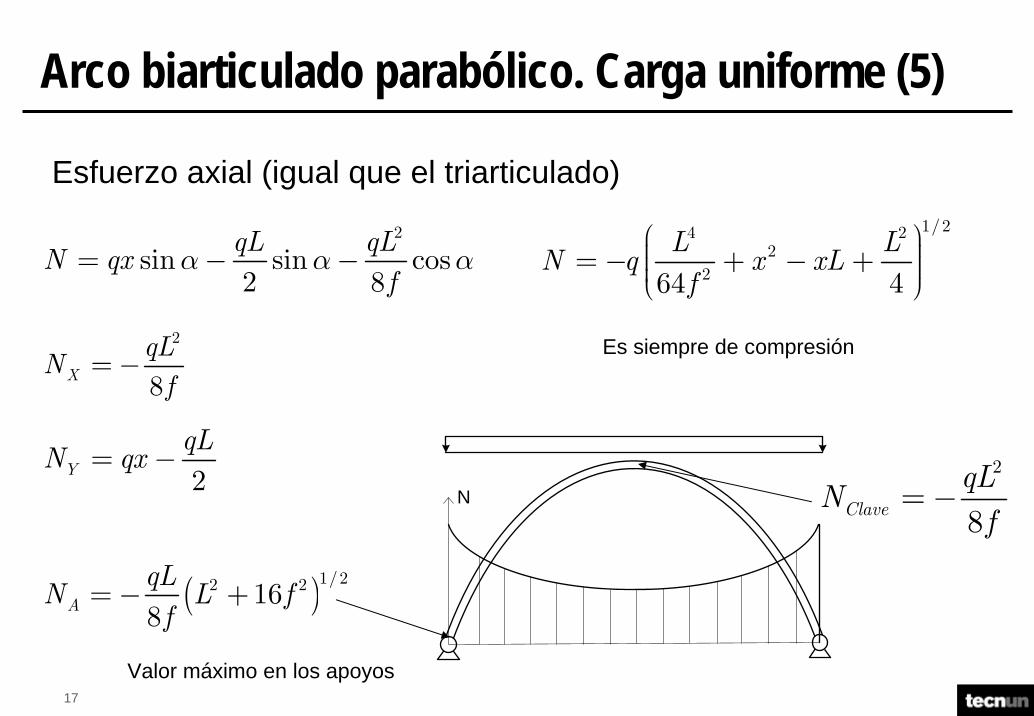
Arco biarticulado parabólico. Carga uniforme (5)
2
8Clave
qLN
f=−
( )1/22 2168A
qLN L f
f=− +
2
8X
qLN
f=−
2Y
qLN qx= −
2
sin sin cos2 8qL qL
N qxf
α α α= − −1/24 2
2264 4
L LN q x xL
f
⎛ ⎞⎟⎜= − + − + ⎟⎜ ⎟⎜⎝ ⎠
Valor máximo en los apoyos
N
Es siempre de compresión
Esfuerzo axial (igual que el triarticulado)

18
Arco biarticulado parabólico. Carga puntual
( )2
0
1 0
5( ) cos
2 48
P f LPD L x y ds
μμ α= − − − =∫
75384X
PLA
f=
max 0.0253 9 /50negM PL x L= − =
20 75
2796X
P xM M yA x
L
⎛ ⎞⎟⎜= − = − ⎟⎜ ⎟⎜⎝ ⎠
0.0547claveM PL=
M
P
19
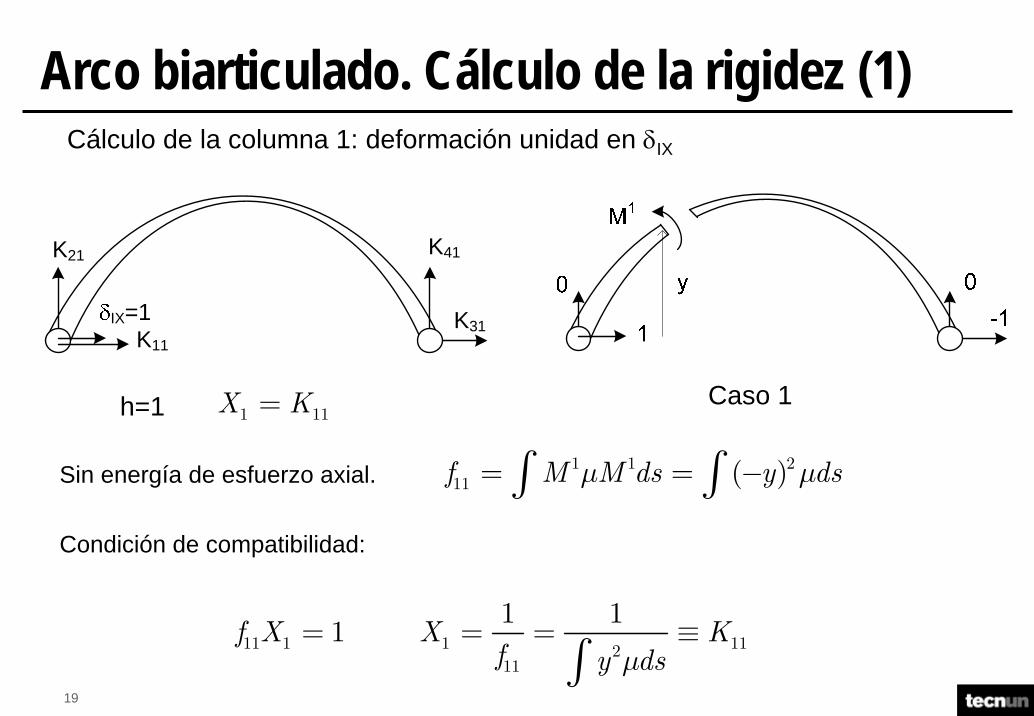
Arco biarticulado. Cálculo de la rigidez (1)
1 11X K=
IX=1
K21
K31K11
K41
Sin energía de esfuerzo axial.
11 1 1 11211
1 11f X X K
f y dsμ= = = ≡
∫
1 1 211 ( )f M M ds y dsμ μ= = −∫ ∫
h=1
Cálculo de la columna 1: deformación unidad en δIX
Caso 1
Condición de compatibilidad:

20
Arco biarticulado. Cálculo de la rigidez (2)
31 11 21 41 0K K K K= − = =
IX=1
K21
K31K11
K41
1 11211
1 1X K
f y dsμ= = ≡
∫
Cálculo de la columna 1
11
21
31 11
41
0
0
K
K
K K
K
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥⎢ ⎥=⎣ ⎦
Condición de compatibilidad:11 1 1 11 0f X D D= + =
21
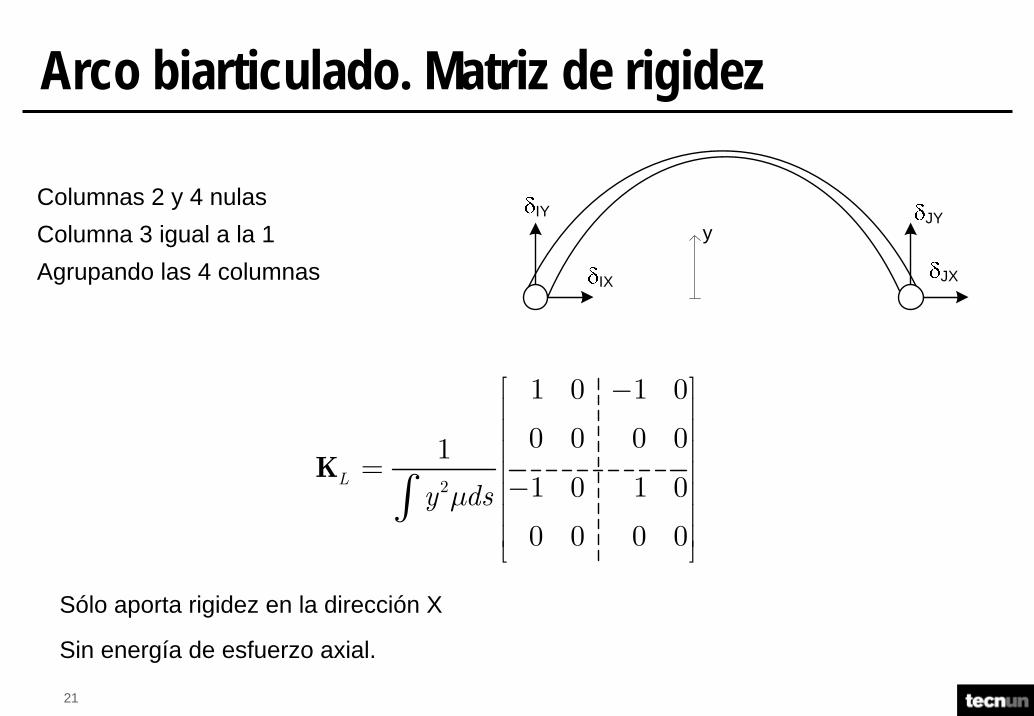
Arco biarticulado. Matriz de rigidez
2
1 0 1 0
0 0 0 011 0 1 0
0 0 0 0
Ly dsμ
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥= ⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∫K
Sólo aporta rigidez en la dirección X
Sin energía de esfuerzo axial.
IX JX
IY JYy
Columnas 2 y 4 nulasColumna 3 igual a la 1Agrupando las 4 columnas

22
Arco biarticulado parabólico. Rigidez
Directriz parabólica. Inercia según la secante: I=I0 sec αI0 inercia en la clave
02
1 0 1 0
0 0 0 0151 0 1 08
0 0 0 0
L
EILf
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥= ⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
K
Si f se anula, no se obtiene la rigidez de la barra recta pues no se ha considerado la energía de axial
2
2 2 20 0
0
8cos
15
f Ly ds y ds y dx
EIμ μ α μ= = =∫ ∫ ∫

23
Arco biarticulado circular. Carga uniforme (1)N0M0
Q0
x
q
qL/2
N1M1
Q1
x1
1M y=−0 2( )2q
M Lx x= −h=1 X1=Ax
1 1 211
2 2
11
( )
2 32
f M M ds y Rd
R S e S eLRf
EI
μ μ θ= = −
+ −=
∫ ∫ cosy R eθ= −
y
L
R e
x
sin /2x R Lθ= +
Longitud del arco S=2RαInercia constante. Sin energía de axial

24
Arco biarticulado circular. Carga uniforme (2)
3 2 2 2
2 2
2 3 6 6
12 2 3X
RL LeS e RL R eSqX A
R S e S eLR
− − += =
+ −
2 2max ( )
2 2 4 8X X
q L L qLM L R e A fA
⎛ ⎞⎟⎜= − − − = −⎟⎜ ⎟⎟⎜⎝ ⎠
( )
( )
0 1 21
3 2 2 21
( )2
2 3 6 624
qD M M ds Lx x y Rd
qD RL LeS e RL R eS
EI
α
α
μ μ θ+
−
= − =− − −
= − − +
∫ ∫
0 2( ) ( cos )2X X
qM M yA Lx x R e Aθ= − = − − −
Momento flector
Momento máximo en la clave x=L/2, θ=0M0
M1=-yAx
qL2/8
f Ax
25
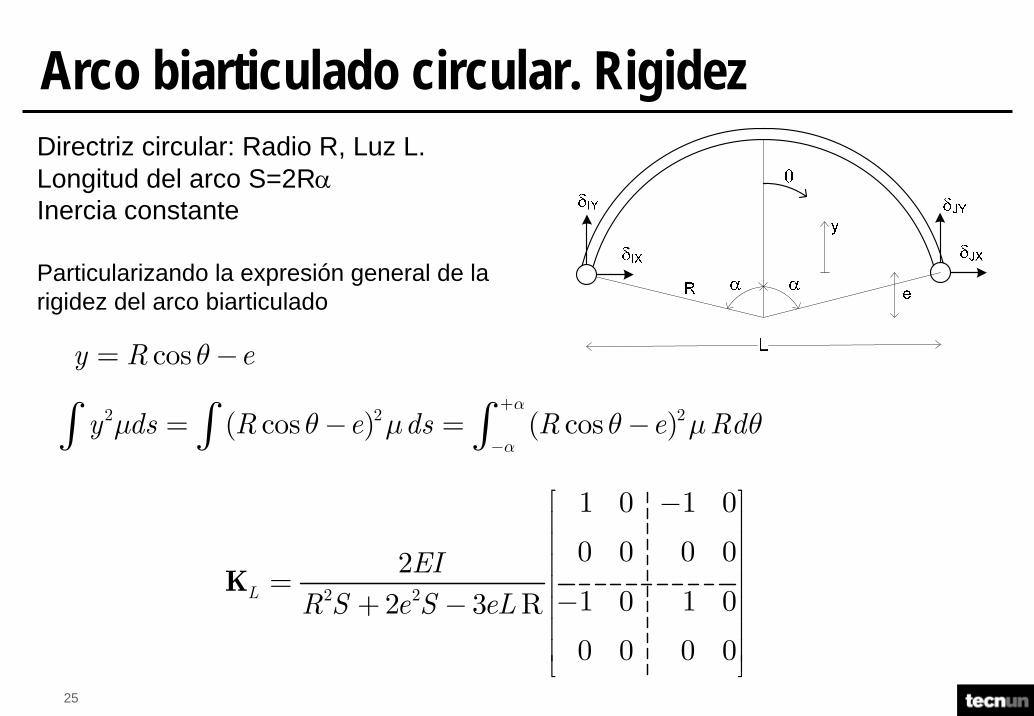
Arco biarticulado circular. Rigidez
cosy R eθ= −
Directriz circular: Radio R, Luz L. Longitud del arco S=2RαInercia constante
2 2 2( cos ) ( cos )y ds R e ds R e Rdα
αμ θ μ θ μ θ
+
−= − = −∫ ∫ ∫
2 2
1 0 1 0
0 0 0 021 0 1 02 3 R
0 0 0 0
L
EIR S e S eL
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥= ⎢ ⎥−+ − ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
K
Particularizando la expresión general de la rigidez del arco biarticulado

26
Arco atirantado
0t t tNλ ρ= −
Pretensión de montaje en el tirante: N0tPositiva a tracción
No se transmite reacción horizontal en A. Tampoco en B para cargas verticales
1t
t t t
LK E A
ρ = =
Error en longitud del tirante:(positivo más largo)
Flexibilidad del tirante
0t t t tN K N= Δ +
( )t t t tN K λ= Δ −

27
Arco atirantado. Cálculo por flexibilidad
30 1 0 1 1 0
1 15t t t t t t
qf LD M M ds N N N
μμ ρ λ λ= − − − = −∫
1 1 1 1 211
22 0
11 0
( ) (1) (1)
815
t t t t
t t
f M M ds N N y ds
f Lf y dx
μ ρ μ ρ
μμ ρ ρ
= + = − +
= + = +
∫ ∫
∫Inercia según la secante:
I=I0 sec α
N0M0
Q0q
qL/2
0 2( )2q
M Lx x= −1
1 cos
M y
N α
=−
=−
Directriz parabólica
h=1 X1=Nt

28
Arco atirantado. Esfuerzo en el tirante
30
01
2011
158
115
tt
t
t
qf LN
DX N
f Lf
μρμρ
+= = =
+
Esfuerzo final en el tirante siempre positivopara q hacia abajo y pretensión de tracción
La pretensión aumenta el esfuerzo final en el tirante
Constante D > 1
Nota: Si ρt=0 (tensor infinitamente rígido) sale Nt = q L 2 / 8fcomo en el arco biarticulado

29
Arco atirantado. Momento flector0 1 0 2( ) ( )
2t t
qM M XM M N y Lx x y N= + = + − = − −
( )2
2 8C t
qLLM M x f N= = = −
M0
M1=-yNt
M=M0 – y Nt
El tirante hace disminuir el momento flector. Disminuye más cuanto más arriba (y)
Momento sin tirante (Punto A libre)
Momento en la clave C:
2
8biartC X
qLM f A= −
Similar al arco biarticulado:
30
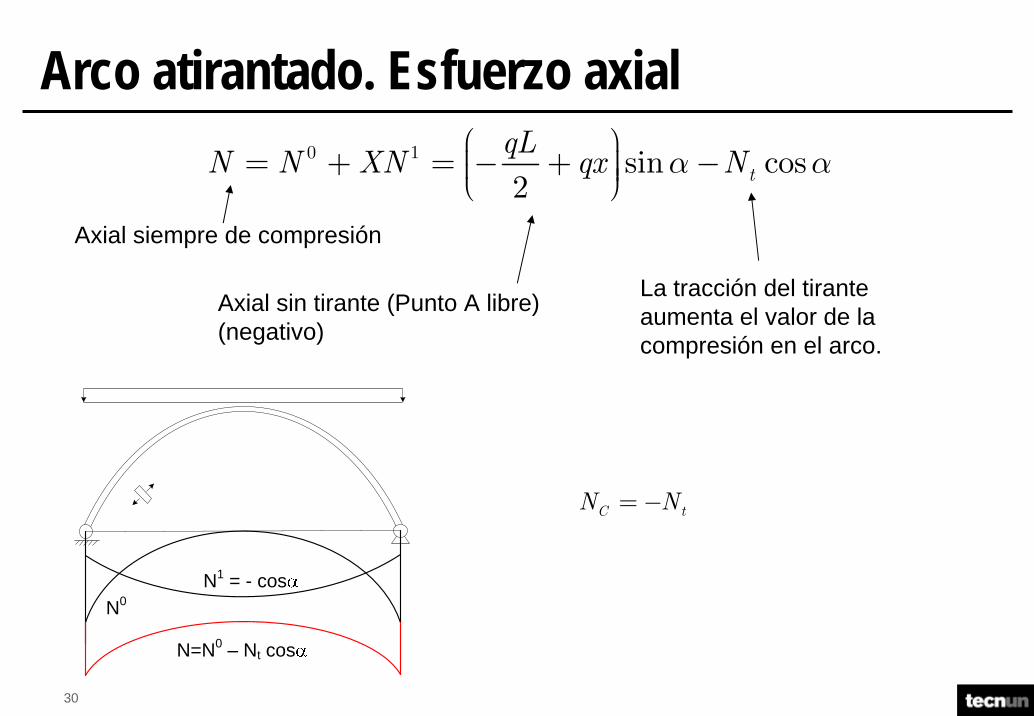
Arco atirantado. Esfuerzo axial0 1 sin cos
2 t
qLN N XN qx Nα α
⎛ ⎞⎟⎜= + = − + −⎟⎜ ⎟⎝ ⎠
N0
N=N0 – Nt cos
N1 = - cos
La tracción del tirante aumenta el valor de la compresión en el arco.
Axial sin tirante (Punto A libre)(negativo)
Axial siempre de compresión
C tN N=−

31
Arco atirantado. Deformación del apoyo A
0t
t tt
N NρΔ
= +
0( )t t t tN N ρΔ = −
30
0
115t t
qf L DN
D Dμ
ρ−
Δ = + tD= denominador de la expresión del esfuerzo en el tirante. D>1
Es igual a la deformación del tirante
Despejando la deformación:
Sustituyendo el valor del esfuerzo en el tirante:
Segundo sumando negativo. La pretensión hace disminuir la deformación del apoyo:
N
N0t
t

32
Arco atirantado pretensado. Resumen
2( )2 t
qM Lx x yN= − −
sin cos2 t
qLN qx Nα α
⎛ ⎞⎟⎜= − + −⎟⎜ ⎟⎜⎝ ⎠
30 0
15t
tt
qf L NN
D Dμρ
= +
La pretensión hace disminuir la deformación del apoyo.
Sin reacción horizontal en A. Tampoco en B para cargas verticales
Axial siempre de compresión- La tracción del tirante aumenta el valor de la compresión en el arco
Aparece momento flector- el esfuerzo en el tirante hace disminuir el flector
Esfuerzo final en el tirante:- siempre positivo para q hacia abajo y pretensión de tracción- la pretensión aumenta el esfuerzo final en el tirante
30
0
115t t t
qf L DN
D Dμ
ρ−
Δ = +
33
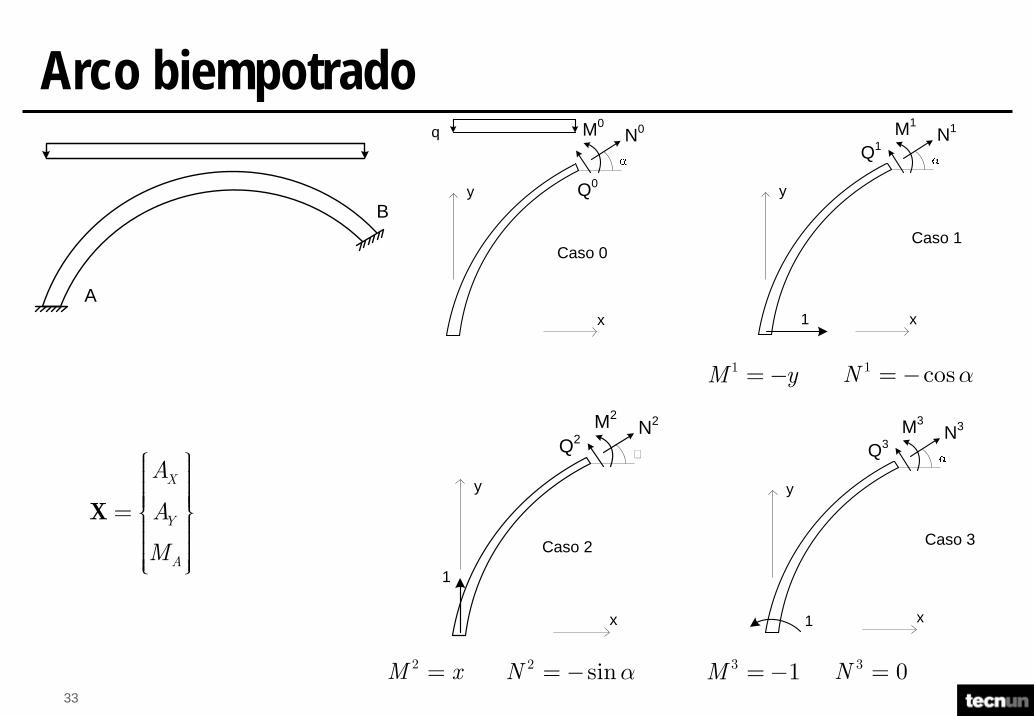
Arco biempotrado
X
Y
A
A
A
M
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
X
A
B
N2M2
Q2
x
1
y
1M y=− 1 cosN α= −
2M x= 2 sinN α= − 3 1M =− 3 0N =
N1M1
Q1
x1
y
N0M0
Q0
x
y
q
N3M3
Q3
x1
y
Caso 0Caso 1
Caso 2 Caso 3
34
Arco biempotrado
0 0
02 02 11 11 01
0 011 11 20 20 10
001 10 00
cos cos
sin sin
m gx
y m g
Ag
N ds T ds T yds M ydsAI J I J I
I J I J I A N ds T ds T xds M xds
I I I M T ds M ds
γ α α α α μ
γ α α α α μ
α μ
⎧ ⎫⎪ + − +⎡ ⎤ ⎧ ⎫ ⎪⎪ ⎪+ − + ⎪⎪ ⎪⎢ ⎥ ⎪⎪ ⎪⎢ ⎥ ⎪⎪ ⎪⎪ ⎪ ⎪− + + − = + − −⎨ ⎬ ⎨⎢ ⎥ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪− ⎪ ⎪ ⎪ − +⎢ ⎥ ⎪ ⎪⎣ ⎦ ⎩ ⎭ ⎪⎪⎩
∫ ∫ ∫ ∫∫ ∫ ∫ ∫
∫ ∫
⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎭
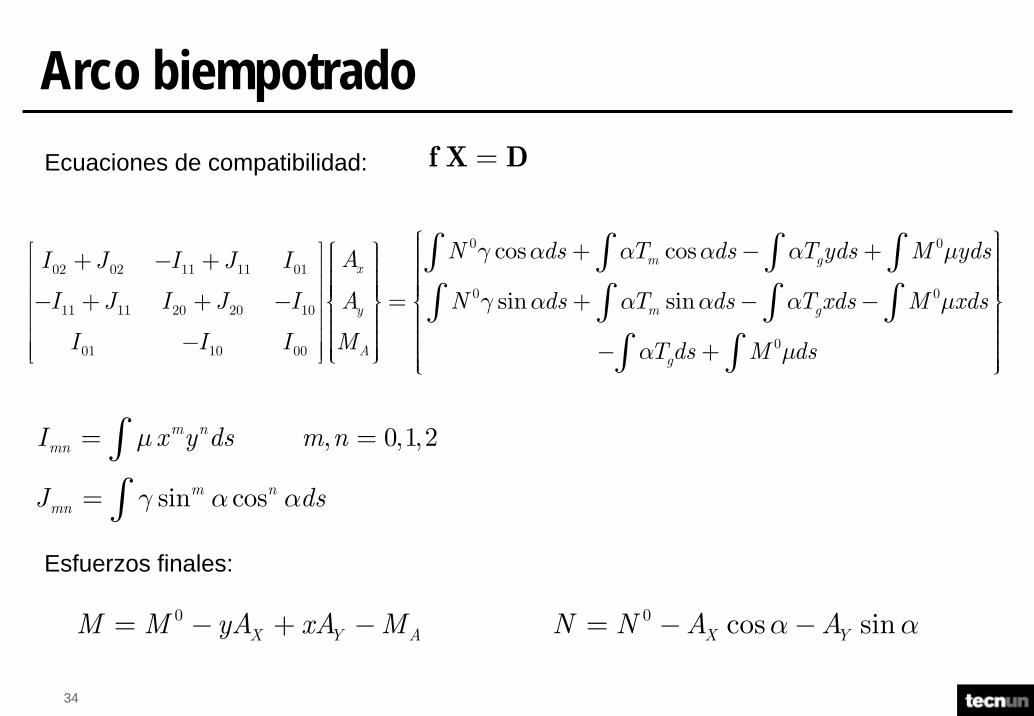
Ecuaciones de compatibilidad:
, 0,1,2m nmnI x y ds m nμ= =∫
sin cosm nmnJ dsγ α α= ∫
0X Y AM M yA xA M= − + −
Esfuerzos finales:
0 cos sinX YN N A Aα α= − −
=f X D
35
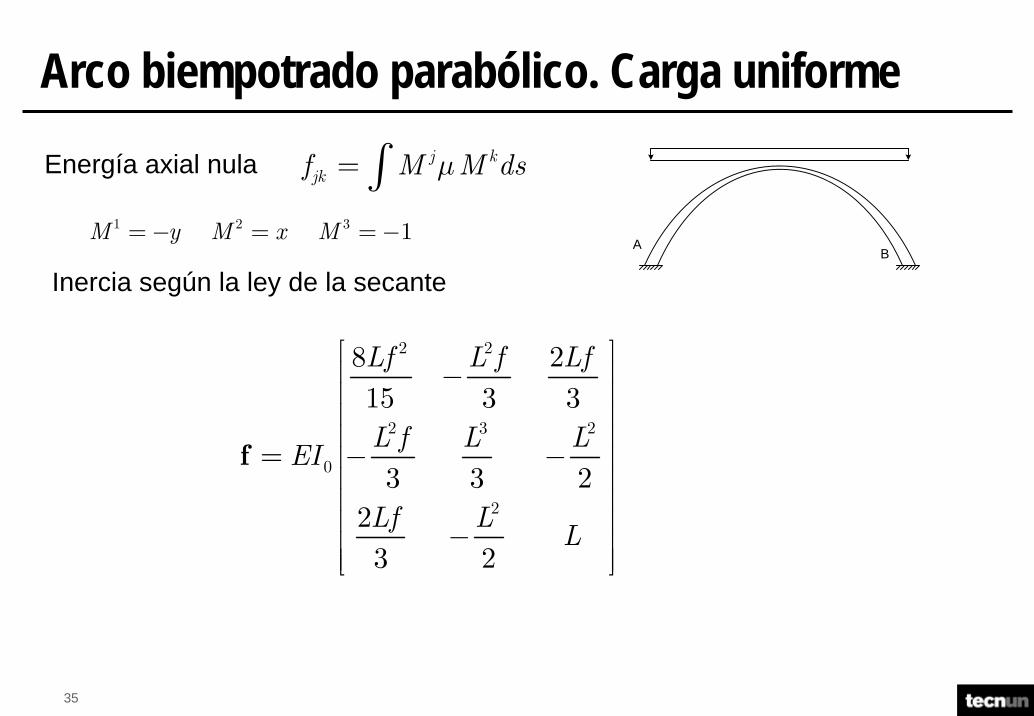
Arco biempotrado parabólico. Carga uniformej k
jkf M M dsμ= ∫
2 2
2 3 2
0
2
8 215 3 3
3 3 223 2
Lf L f Lf
L f L LEI
Lf LL
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥
= − −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎣ ⎦
f
AB
Energía axial nula
Inercia según la ley de la secante
1 2 3 1M y M x M=− = =−

36
Arco biempotrado parabólico. Carga uniforme0 j
jD M M dsμ=−∫ N0M0
Q0
x
y
q
20
2qx
M =−
Coeficientes D
30
40
30
/10
/8
/6
qL f EI
qL EI
qL EI
⎧ ⎫⎪ ⎪−⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪−⎪ ⎪⎪ ⎪⎩ ⎭
D
2 / 8
/2
0
X
Y
A
qL fA
A qL
M
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪⎩ ⎭⎪ ⎪⎩ ⎭
X
Mismas reacciones que en el arco isostáticoNo hay momento en los apoyos
37
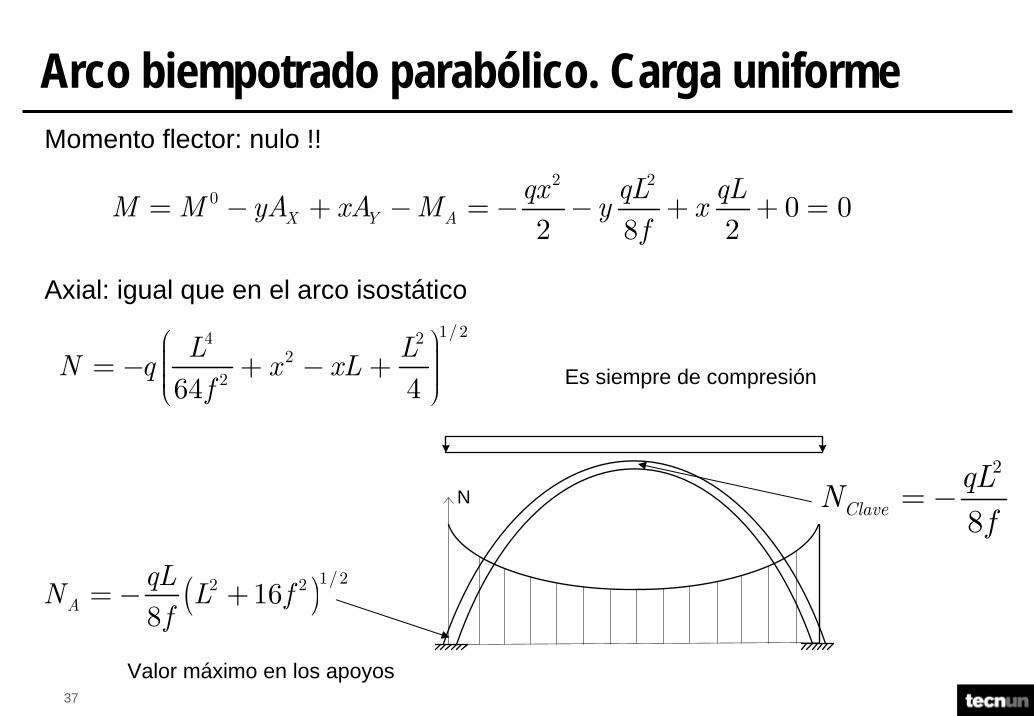
Arco biempotrado parabólico. Carga uniforme
2 20 0 0
2 8 2X Y A
qx qL qLM M yA xA M y x
f= − + − =− − + + =
Momento flector: nulo !!
Axial: igual que en el arco isostático
2
8Clave
qLN
f=−
( )1/22 2168A
qLN L f
f=− +
1/24 22
264 4L L
N q x xLf
⎛ ⎞⎟⎜= − + − + ⎟⎜ ⎟⎜⎝ ⎠
Valor máximo en los apoyos
N
Es siempre de compresión

38
Arco biempotrado. Cálculo de la rigidez (1)
N2M2
Q2
x
1
y
N1M1
Q1
x1
y
N0M0
Q0
x
y
N3M3
Q3
x1
y
Caso 0Descargado
Caso 1
Caso 2 Caso 3
1 11
2 21
3 31
X
Y
A
X A K
X A K
X M K
= =
= =
= =
Columna 1 de K h=3
39
Arco biempotrado. Cálculo de la rigidez (2)
2 2
112 3 2
0 21
2 31
8 215 3 3 1
03 3 2
023 2
Lf L f Lf
KL f L L
EI K
KLf LL
⎡ ⎤⎢ ⎥−⎢ ⎥ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦−⎢ ⎥⎢ ⎥⎣ ⎦
i jijf M M dsμ= ∫
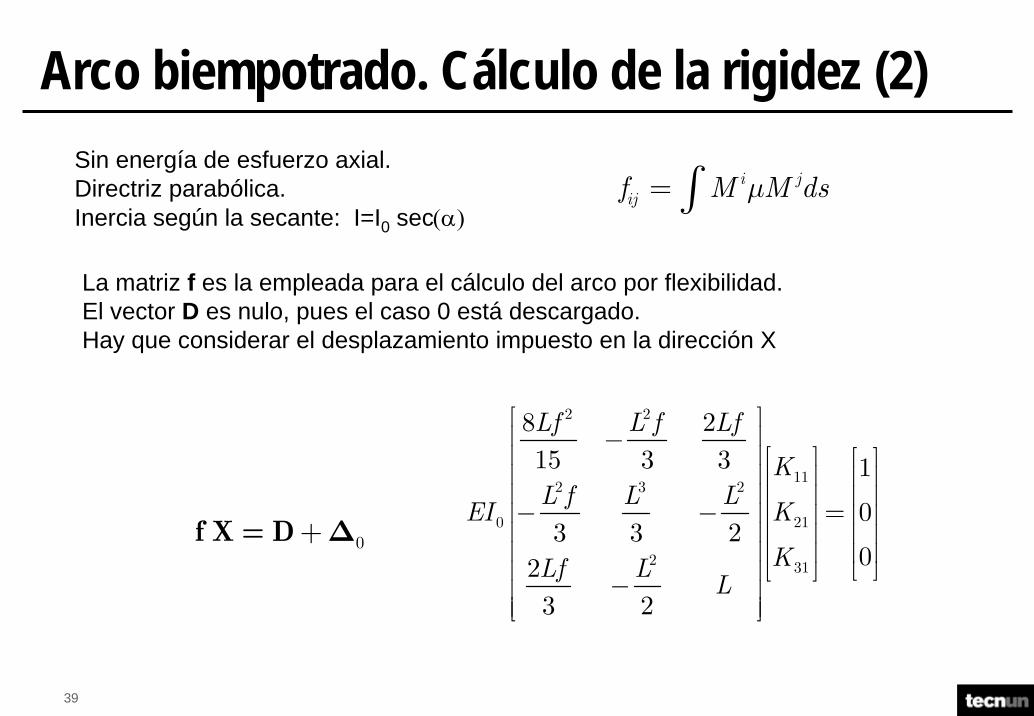
Sin energía de esfuerzo axial.Directriz parabólica. Inercia según la secante: I=I0 sec(α)
0+f X = D Δ
La matriz f es la empleada para el cálculo del arco por flexibilidad.El vector D es nulo, pues el caso 0 está descargado.Hay que considerar el desplazamiento impuesto en la dirección X

40
Arco biempotrado. Cálculo de la rigidez (3)
2 2
11 12 132 3 2
0 21 22 23
2 31 32 33
8 2
15 3 3 1 0 0
0 1 03 3 2
0 0 12
3 2
Lf L f Lf
K K KL f L L
EI K K K
K K KLf LL
⎡ ⎤⎢ ⎥−⎢ ⎥ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦−⎢ ⎥⎢ ⎥⎣ ⎦ 1
II II−=K f
II IIf K = I
Columna 3
Repitiendo para las columnas 1, 2 y 3 de K en el nudo I: sólo cambia la deformación unidad
Columna 1 Columna 2
Flexibilidad en el nudo I Rigidez en el nudo I
Deformación impuesta

41
Arco biempotrado. Rigidez
Directriz parabólica. Inercia según la secante.
I=I0 sec(α)I0 inercia en la clave
2
3 2 3 2
2 2
0
2 2
3 2 3 2
2 2
2
15 45 15
2 4 20 012 6 12 6
0 0156 9 6 32
45 15 45 15
4 2 4 20 012 6 12 6
0 015 156 3 6 92 2
454
152
IX
IY
I
JX
JY
J
Lf Lf Lf
L L L L
LfL L L LEI
Lf Lf Lf Lf
L L L L
Lf LfL L L L
Lf
P
P
M LfP
P
M
− −
⎧ ⎫⎪ ⎪ −⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪ − −⎪ ⎪⎪ ⎪ =⎨ ⎬⎪ ⎪⎪ ⎪ − −⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪ − − −⎪ ⎪⎪ ⎪⎩ ⎭
−− −
−
IX
IY
I
JX
JY
J
δ
δ
θ
δ
δ
θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎧ ⎫⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎨ ⎬⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎩ ⎭⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
IXJX
IY JY
I J
Sin energía de esfuerzo axial.

42
Ejemplo 1
L
H
f
q
L
Rígido axialmente
0
0 03 2
0 02
22
2
0
0
3
6
0
0
152
12 6
6 9 4
45 14
261
2
5
X X
Y Y
ILf
I IL LI IL L
IH H
AE H
IH
IL
I
F
FI MI
Lf H
f
θ
⎡ ⎤+ +⎢ ⎥
⎢ ⎥⎢ ⎥ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪+⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪+⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭⎢ ⎥⎢ ⎥⎢
−
−
−
⎥⎣ ⎦
+−
Δ
ΔArco parabólico, sin energía de esfuerzo axial, inercia según la secante.
Pilar central infinitamente rígido axialmente
X
Y
q
L
H
f
43
Ejemplo 1. Fuerzas
2
8
2
0
X
Y
qLf
qLF
F
M
⎧ ⎫⎛ ⎞⎪ ⎪⎟⎪ ⎪⎜− ⎟⎪ ⎜ ⎪⎟⎟⎜⎪ ⎪⎝ ⎠⎧ ⎫ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎛ ⎞⎪ ⎪⎪ ⎪ ⎪ ⎪⎟⎜= −⎨ ⎬ ⎨ ⎬⎟⎜ ⎟⎜⎝ ⎠⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪⎩ ⎭ ⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
qL/2
qL2/8f qL2/8f
qL/2M0=0
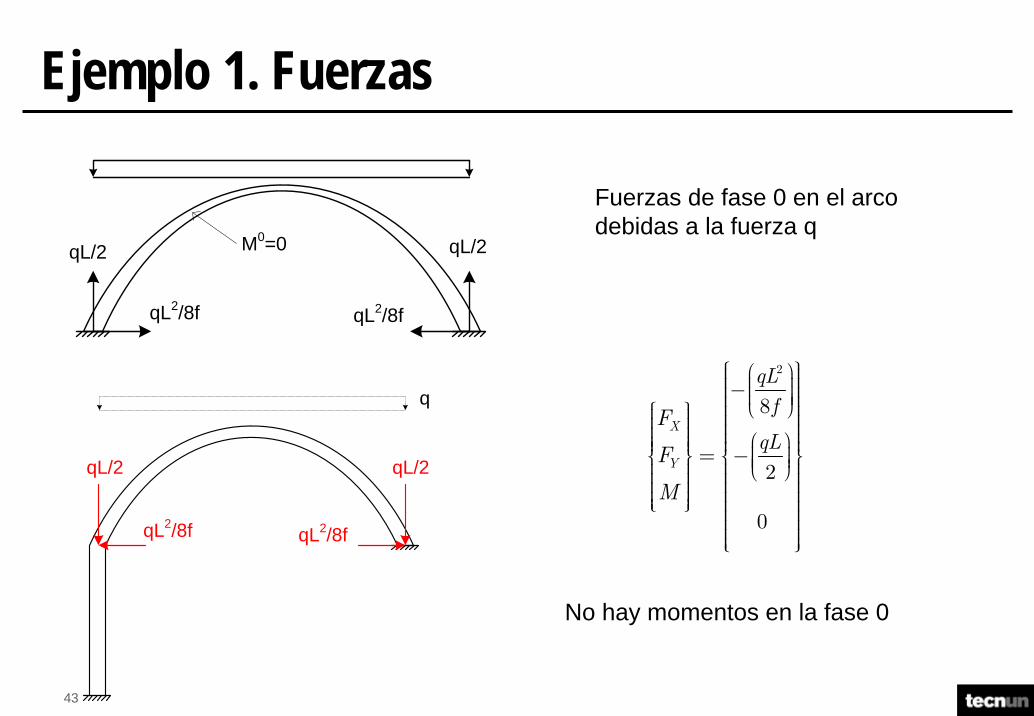
Fuerzas de fase 0 en el arco debidas a la fuerza q
qL2/8f
qL/2
q
qL/2
qL2/8f
No hay momentos en la fase 0
44
Ejemplo 1. Esfuerzos finales en el arco2
2
02
2
15 45 158 2 4 20 0
12 0
0
8
2
0
454
IX
IY
I
JX
JY
J
qLf Lf Lf LfqL
EIqLf
qL
LfP
P
M
P
P
M
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪ − −⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎧ ⎫ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪⎪ ⎪ ⎪ ⎪= +⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪−⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪⎩ ⎭ ⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
3 2 3 2
2 2
2 2
3 2 3 2
2 2
2 6 12 60156 9 6 32
45 15 45 154 2 4 20 0
12 6 12 60 015 156 3 6 92 2
152
0
0
0
X
YL L L L
LfL L L L
Lf Lf Lf Lf
L L L L
Lf LfL L L L
Lf θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎧ ⎫⎪ ⎪− ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎪ ⎪− −⎢ ⎥ ⎪ ⎪⎪ ⎪⎪ ⎪⎢ ⎥ ⎨ ⎬⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪− − ⎪⎢ ⎥ ⎪⎪⎢ ⎥ ⎪⎢ ⎥ ⎪⎪⎢ ⎥− − − ⎪⎪⎢ ⎥ ⎪⎩ ⎭⎢ ⎥⎢ ⎥
−⎢ ⎥− −⎢ ⎥⎣ ⎦
Δ
Δ−
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
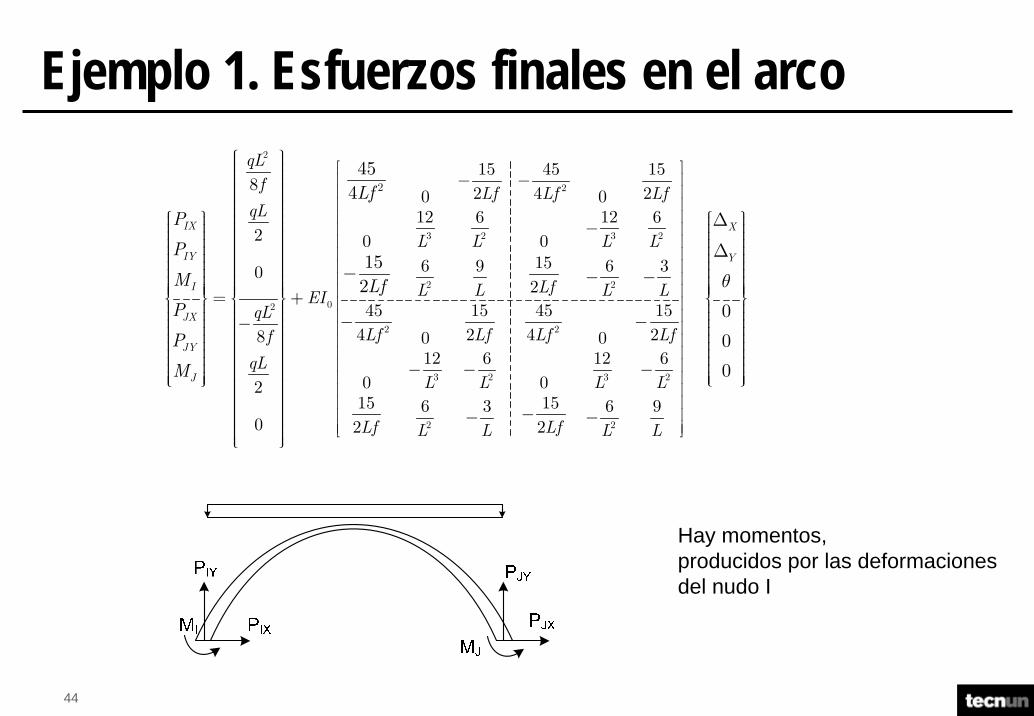
Hay momentos, producidos por las deformaciones del nudo I

45
Ejemplo 1. Flector en el arco
IX
IY
I
2
2IY IX I
qxM P x P y M
f= − − −
20 02
0 03 2
0 0 02
45 15
8 4 212 6
215 6 9
2
XIX
YIY
X YI
qL EI EIP
f Lf LfqL EI EI
PL L
EI EI EIM
Lf L L
θ
θ
θ
Δ= + −
Δ= + +
Δ Δ= − + +
Variación parabólica en x
46
Ejemplo 2
23
2
1 1
1
2
2
3
1
0 0
0 0 0
0 0
0 0 0
3
3C C
XC C
Y
X X
Y Y
X
Y
K
EAH
K
E
EIH
AH
KF
F
F
H
F
EI
K
⎡ ⎤+ −⎢ ⎥
⎢ ⎥ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪+ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎩ ⎭⎩ ⎭⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
Δ
Δ
Δ−Δ
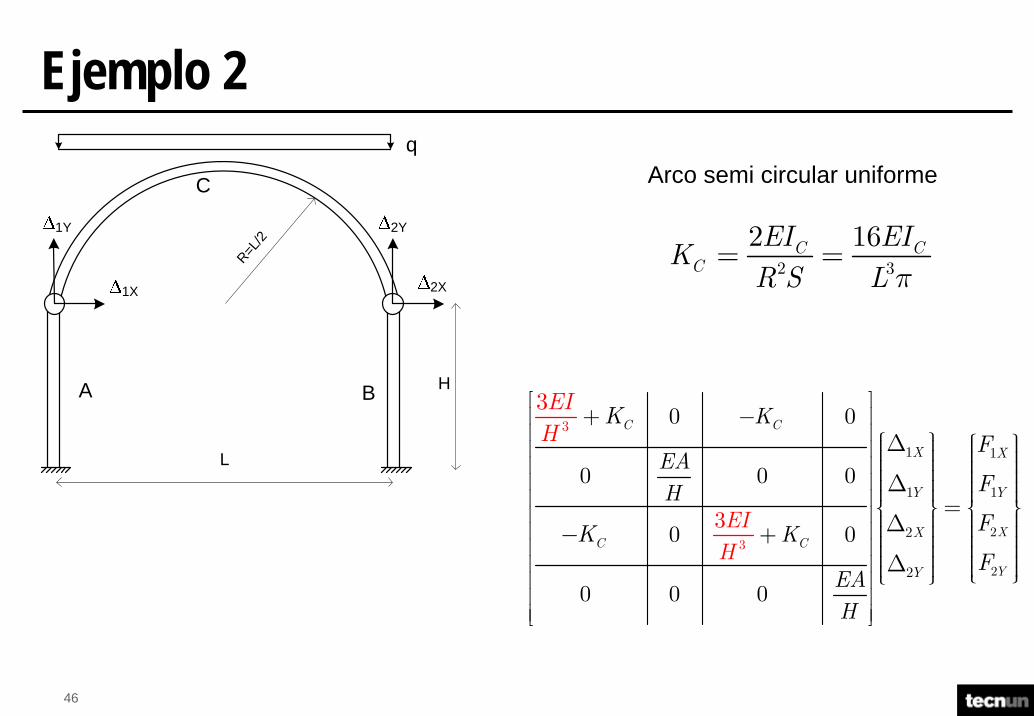
Arco semi circular uniforme
2 3
2 16C CC
EI EIK
R S L π= =
1X
1Y
q
L
H
R=L/2
2X
2Y
A
C
B
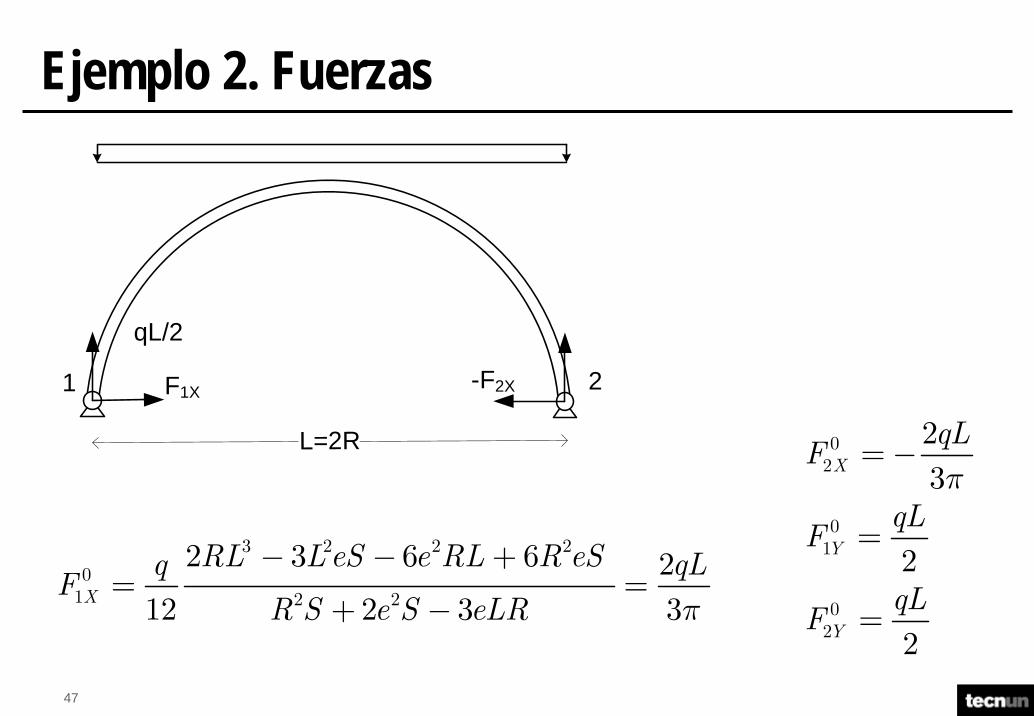
47
Ejemplo 2. Fuerzas
02
01
02
23
2
2
X
Y
Y
qLF
qLF
qLF
π=−
=
=
L=2R
1 2
qL/2
F1X -F2X
3 2 2 2
01 2 2
2 3 6 6 212 2 3 3X
RL LeS e RL R eSq qLF
R S e S eLR π
− − += =
+ −

48
Ejemplo 2. Ecuación de equilibrio
3
1
1
2
3
2
3
20 03
0 0 0220 03
0 0 02
3C C
C C
X
Y
X
Y
qLK
EA qLH
qLK
EH
E
A qL
IH
EIH
K
K
π
π
⎡ ⎤ ⎧ ⎫⎪ ⎪+ −⎢ ⎥ ⎪ ⎪−⎪ ⎪⎢ ⎥ ⎪ ⎪⎧ ⎫⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ −⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪+ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎩ ⎭⎢ ⎥ ⎪ ⎪⎪ ⎪−⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥ ⎩ ⎭⎣ ⎦
Δ
Δ
Δ−Δ
qL/2
q
qL/2
2qL 2qL

49
Ejemplo 3. Añadimos un tirante pretensado
( )
( )
0
03
3
1
1
2
2
20 03
0 0 02
3 20 03
0 0 02
3C C
C C
X
Y
X
Y
K K N
K K
qLK
EA qLH
EI qLKH
EA qLH
N
EIK
H
K
π
π
⎡ ⎤ ⎧ ⎫⎪ ⎪+ −⎢ ⎥ ⎪ ⎪− −⎪ ⎪⎢ ⎥ ⎪ ⎪⎧ ⎫⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ −⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪+ −⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎩ ⎭⎢
+ −
⎥ ⎪ ⎪⎪ ⎪−⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥
+
⎩ ⎭
−
−
⎣ ⎦
Δ
Δ
Δ−Δ
1X
1Y
q
L
H
R=L/2
2X
2Y
A
C
B
K
Disminuyen las fuerzas exteriores
Aumenta la rigidez (poco)


















