Análisis y Diseño de máquinas secuenciales sincrónicaslsb/elo211/clases/c11.pdf · la Figura...
34
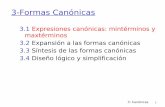
1 Profesor Leopoldo Silva Bijit 19-01-2010 Capítulo 11 Análisis y Diseño de máquinas secuenciales sincrónicas 11.1. Análisis Dado el esquemático de una red secuencial sincrónica se desea obtener el diagrama de estados; y a partir de éste, inferir el funcionamiento de la máquina. Este procedimiento se suele llamar reingeniería. A continuación se resume el funcionamiento de una máquina secuencial; en el esquemático de la Figura 11.1, los elementos de memoria pueden ser flip-flops Ds o JKs. Q Clk y(k+1) Reset’ y(k) x(k) z(k) P1 P2 Figura 11.1. Esquema de máquina secuencial. El estado actual () yk es sostenido en las salidas () Qk de los flip-flops, durante el intervalo de tiempo k. En este intervalo, se generan () zk e ( 1) yk a partir de () yk y () xk , en la red combinacional. El próximo estado, ( 1) yk , se lleva a las entradas de los flip-flops, de tal manera que en el instante (k +1) las salidas de los flip-flops, almacenaran los valores ( 1) yk . Para esto es indispensable que las entradas a los flip-flops sean estables en el momento de aplicar el canto del reloj que efectuará la conmutación, o cambio de estado, que implica pasar del intervalo k al intervalo (k+1). Para n entradas, m estados y p salidas se tienen, los vectores booleanos:
Transcript of Análisis y Diseño de máquinas secuenciales sincrónicaslsb/elo211/clases/c11.pdf · la Figura...

1
Profesor Leopoldo Silva Bijit 19-01-2010
Capítulo 11
Análisis y Diseño de máquinas
secuenciales sincrónicas
11.1. Análisis
Dado el esquemático de una red secuencial sincrónica se desea obtener el diagrama de estados;
y a partir de éste, inferir el funcionamiento de la máquina. Este procedimiento se suele llamar
reingeniería.
A continuación se resume el funcionamiento de una máquina secuencial; en el esquemático de
la Figura 11.1, los elementos de memoria pueden ser flip-flops Ds o JKs.
Q
Clk
y(k+1)
Reset’
y(k)
x(k) z(k) P1 P2
Figura 11.1. Esquema de máquina secuencial.
El estado actual ( )y k es sostenido en las salidas ( )Q k de los flip-flops, durante el intervalo de
tiempo k. En este intervalo, se generan ( )z k e ( 1)y k a partir de ( )y k y ( )x k , en la red
combinacional. El próximo estado, ( 1)y k , se lleva a las entradas de los flip-flops, de tal
manera que en el instante (k +1) las salidas de los flip-flops, almacenaran los valores ( 1)y k .
Para esto es indispensable que las entradas a los flip-flops sean estables en el momento de
aplicar el canto del reloj que efectuará la conmutación, o cambio de estado, que implica pasar
del intervalo k al intervalo (k+1).
Para n entradas, m estados y p salidas se tienen, los vectores booleanos:

2 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
0 1( , ,..., )nx x x x
0 1( , ,..., )my y y y
0 1( , ,..., )pz z z z
Programas de los flip-flops. Matrices de programación.
A partir del esquemático de la red booleana pueden escribirse las funciones de las entradas de
los flip-flops en función de la entrada y el estado presente, se denominan programas de los flip-
flops, o ecuaciones de excitación de éstos.
En caso de flip-flops JKs, se tienen las ecuaciones:
( , )i iJ f y x
( , )i iK g y x
En caso de flip-flops Ds, se tienen las ecuaciones:
( , )i iD f y x
Las representaciones de estas ecuaciones en un mapa de Karnaugh se denominan: Matrices de
Programación.
11.2. Método de análisis tabular
El método de análisis tabular está basado en obtener la matriz de transiciones a partir de las
matrices de programación. En cada casilla, de cada una de las (m+1) matrices de programación,
mediante las tablas características, se determinan las (m+1) componentes del vector de próximo
estado de cada casilla de la matriz de transición.
El siguiente esquema muestra el proceso para obtener la matriz de transiciones:
x
y
Ji, Ki
J K y(k+1)
0 0 y(k)
0 1 0
1 0 1
1 1 y’(k)
x y
y(k+1)
Figura 11.2. Esquema análisis tabular
Se muestra sólo la matriz de programación del flip-flop i-ésimo, que se asume del tipo JK. Para
cada par ( , )i iJ K de la matriz de programación i-ésima, mediante la tabla característica, se
encuentra el próximo estado ( 1)iy k asociado; componiendo de este modo el vector y(k+1).

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 3
Profesor Leopoldo Silva Bijit 19-01-2010
A partir de la tabla de transiciones, resulta sencillo dibujar el diagrama de estados, y a partir de
éste determinar el funcionamiento u operación de la máquina secuencial.
11.3. Método analítico.
Las ecuaciones de los programas de los flip-flops, que se asumen del tipo JK:
( , )i iJ f y x
( , )i iK g y x
Se reemplazan en las ecuaciones características de los (m+1) flip-flops:
( 1) ' 'i i i i iy k J y K y
De esta forma se eliminan las variables iJ y iK , quedando las (m+1) ecuaciones:
( 1) ( ( ), ( ))i iy k f y k x k
Las que representadas en un mapa de Karnaugh, forman la matriz de transiciones.
11.4. Ejemplo método tabular
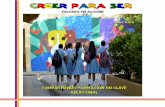
Se tiene el siguiente esquemático:
C
P1 C
P2
clk
S J C
P K Q
_
S J C
P K Q
_ Q
S J C
P K
A
B
C
reset
clk K
J Q
x
z
1
Q’
Figura 11.3. Ejemplo de máquina secuencial empleando flip-flops JK

4 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Nótese que se tiene una señal de reset común para los tres flip-flops. Esto implica que el estado
inicial será el 000.
Los cambios ocurren con el canto de subida del reloj.
Se asume que la entrada x es una secuencia sincrónica con el mismo reloj (clk) del sistema.
Leyendo las ecuaciones de las entradas de los flip-flops, directamente del esquemático, se
obtienen:
( ' ' ');
( ' ' );
' ; '
A A
B B
C C
J B C B x K B
J AB B C K B
J A x K B x
Para obtener la matriz de programación del flip-flop A: Se debe establecer JA y KA para cada
combinación posible del estado presente y la entrada. Se procede en forma análoga para los
flip-flops B y C.
Este proceso de ilustra en la Figura 11.4, para cada uno de los flip-flops, se obtienen las
siguientes matrices de programación:
x
0 1
0 0 0
0 0 10 1 10 1 0
1 1 0
1 1 1
1 0 1
1 0 0
ABC
10 00
10 1001 01
01 01
01 01
01 01
10 10
10
JA
, KA
00
x
0 1
0 0 0
0 0 10 1 10 1 0
1 1 0
1 1 1
1 0 1
1 0 0
ABC
00 00
10 1001 01
01 01
01 01
01 01
10 10
10
JB
A
, KB
A
10
x
0 1
0 0 0
0 0 10 1 10 1 01 1 0
1 1 11 0 1
1 0 0
ABC
01 10
01 1001 11
01 11
01 01
01 01
01 00
01
JC
A
, KC
00
Figura 11.4. Matrices de Programación
Usando la tabla característica del flip-flop JK se logra, la matriz de transiciones, de la Figura
11.5. Además se ha empleado la ecuación de salida: z xBC .

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 5
Profesor Leopoldo Silva Bijit 19-01-2010
x
ABC 0 1
000 100/0 001/0
011 000/0 000/1
010 000/0 001/0
110 000/0 000/0
111 000/0 000/1
101 110/0 111/0
100 110/0 110/0
A(k+1) B(k+1) C(k+1)/z
001 110/0 111/0
Figura 11.5. Matriz de transiciones del Ejemplo 11.4.
Para todas las ocurrencias de (J,K) igual a (1,0) en las tablas de la Figura 11.4, se coloca un 1 en
la columna correspondiente de la Figura 11.5; se coloca 0 para (J, K) igual a (0,1).
Para (J, K) igual a (0,0) en las tablas de la Figura 11.4, se coloca el valor actual de la variable en
la columna correspondiente de la Figura 11.5.
Para (J, K) igual a (1,1) en las tablas de la Figura 11.4, se coloca el valor complementado de la
variable actual en la columna correspondiente de la Figura 11.5.
Si colocamos la cifra decimal, equivalente del nombre binario del estado, se logra la matriz de
transiciones, empleando nombres simbólicos para los estados. Se obtiene la Figura 11.6,
izquierda. Y de esta matriz se obtiene el diagrama de estados que se ilustra a la derecha en la
Figura 11.6.

6 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Estado x
actual 0 1
0 4/0 1/0
1 6/0 7/0
3 0/0 0/1
2 0/0 1/0
6 0/0 0/0
7 0/0 0/1
5 6/0 7/0
4 6/0 6/0
Estado próximo/z
Figura 11.6. Diagrama de estados ejemplo 11.3
Se observa que los estados 2, 3 y 5 sólo pueden ser estados iniciales y no participan de la
naturaleza secuencial del resto. Si no se dibujan, resulta la Figura 11.7.
0
4 1
6 7
0/0
1/1
0/0 1/0
0/0
1/0
/0
/0
reset
Figura 11.7. Diagrama de estados reducido.
En la Figura 11.7, con estado inicial igual a cero, puede concluirse que el circuito es un
reconocedor de secuencia de largo fijo igual a 3. A partir del estado inicial acepta tres valores de
la entrada y luego toma una decisión.
La máquina analiza grupos de 3 bits de la secuencia de entrada, y si ésta es 111, genera un uno
en la salida; cero en el resto de los casos.
3
0
4 1
6 7
2 0/0
1/1 0/0
1/0
1/0 0/0
0/0 1/0 0/0
1/1
1/0 0/0
/0
/0
5

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 7
Profesor Leopoldo Silva Bijit 19-01-2010
11.5. Ejemplos del método analítico.
a) Para la Figura 11.3, se tienen las siguientes ecuaciones:
( ' ' ');
( ' ' );
' ; '
A A
B B
C C
J B C B x K B
J AB B C K B
J A x K B x
z xBC
Las ecuaciones anteriores representan el esquemático de la Figura 11.3.
Para los flip-flops JK se tienen las siguientes ecuaciones características:
Donde se han reemplazado las salidas Q de los flip-flops, por las variables de estado: A, B y C.
Eliminando las variables J y K de los tres flip-flops, reemplazándolas en las ecuaciones
características, se obtienen:
( 1) ( )
( 1) ( )
( 1) ( )
A k B C B x A BA
B k AB BC B BB
C k AxC B x C
Las ecuaciones anteriores permiten obtener directamente la matriz de transición, para esto basta
representarlas en un mapa de Karnaugh: x
ABC 0 1
000 100/0 001/0
011 000/0 000/1
010 000/0 001/0
110 000/0 000/0
111 000/0 000/1
101 110/0 111/0
100 110/0 110/0
A(k+1) B(k+1) C(k+1)/z
001 110/0 111/0
Figura 11.8. Matriz de transiciones, empleando método analítico.
CKCJkC
BKBJkB
AKAJkA
CC
BB
AA
)1(
)1(
)1(

8 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Que resulta ser igual a la obtenida antes, por el método tabular. Luego se continúa en forma
similar al ejemplo anterior, desarrollado en 11.4.
b) Analizar la máquina secuencial descrita por el diagrama de bloques, de la Figura 11.9, y las
ecuaciones siguientes:
Figura 11.9. Entradas y salidas de máquina secuencial.
1 2 1
2 1 2
;
;
J xy K x
J xy K x
1 1 2
2 1 2
3 1 2
z y y
z xy y
z y y
Las ecuaciones del próximo estado de los flip-flops:
1 1 1 1 1
2 2 2 2 2
Y J y K y
Y J y K y
Reemplazando las ecuaciones de programación de los flip-flops en las ecuaciones anteriores,
resultan:
1 2 1 1
2 1 2 2
Y xy y xy
Y xy y xy
Que permite escribir la siguiente tabla de transiciones:
Figura 11.10. Tabla de transiciones ejemplo 11.5.b
Las ecuaciones de las salidas pueden escribirse, empleando el mapa de Karnaugh, de la Figura
11.11:
x M.S.S.
clk
z2
x
y1 y2 0 1
0 0 00 01
0 1 01 10
1 1 11 00
1 0 10 00
Y1Y2
z1
z3

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 9
Profesor Leopoldo Silva Bijit 19-01-2010
x
y1 y2 0 1
00 100 100
01 000 000
11 001 001
10 000 010
z1 z2 z3
Figura 11.11. Ecuaciones de salidas.
Con la asignación de estados, de la Figura 11.12, en la que se emplea como nombre lógico el
equivalente decimal del nombre físico o binario, se obtiene el diagrama de estados que se
muestra en la Figura 11.13.
Figura 11.12. Asignación de estados simbólicos.
Figura 11.13. Diagrama de estados de Mealy
Observando el diagrama, de la Figura 11.13, se obtienen:
El estado 3 sólo puede ser estado inicial.
La salida z3 indica que se está en estado 3.
La salida z1 indica que se está en estado 0.
Si se parte del estado cero, se cuentan 3 niveles altos de la entrada, y se lo indica en salida z2
mediante un pulso.
Notar que debido a que z2 depende de x, se modeló mediante una máquina de Mealy.
11.6. Frecuencia máxima de operación del reloj.
Para un flip-flop sincronizado por cantos de bajada:
x
Estado 0 1
0 0 1
1 1 2
3 3 0
2 2 0
Est. próximo
1 0
3 2
0/100
1/001
0/001 1/010
1/100
0/000 1/100
0/000
x/z1z2z3

10 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
tf
Red
Combinacional
J Q
reloj
K
tp
Figura 11.14. Definición de tiempos de propagación.
a) Se puede calcular el retardo de propagación, a través de los circuitos combinacionales, por la
vía más larga. Es decir, por aquella vía de realimentación que produzca el mayor retardo, está
vía suele denominarse ruta crítica. Sea este tiempo: tp. b) Desde el canto de bajada del reloj, hasta que la salida de un flip-flop cambie de estado, se
tiene el tiempo de propagación en el flip-flop. Sea este tiempo: tf.
c) Se tiene además el tiempo de setup, tsu, que es aquel durante el cual las entradas de los flip-
flops no deben cambiar, antes del canto.
d) El período del reloj puede cambiar debido a que la frecuencia puede experimentar
variaciones debidas a cambios de la temperatura. También la señal del reloj en diferentes puntos
del circuito puede tener variaciones por el tiempo de propagación a través de los cables. Sea el
máximo tiempo de variación tskew.
Si tenemos un reloj:
t0 t1 t
Figura 11.15. Ciclos del reloj
Por las condiciones a, b, c y d, se debe cumplir: to + t1 > tf + tp+ tsu+ tskew.
Sea tpmin el mínimo tiempo que tardan los cambios de las señales en atravesar la red
combinacional, y tfmin el mínimo tiempo en que cambian las salidas de los flip-flops,
después del canto; entonces debe cumplirse: tpmin + tfmin + tskew > thold
Si puede asegurarse que las entradas no cambian tsu antes del canto y thold después del canto, el
flip-flop funcionará confiablemente. Esta verificación debe efectuarse para cada uno de los flip-
flops de la red booleana.
Entonces el período mínimo del reloj, debe cumplir:
Tmín = tf + tp + tsu+ tskew.
Obteniéndose una frecuencia máxima:

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 11
Profesor Leopoldo Silva Bijit 19-01-2010
1máx
skewf p su
ft t t t
Algunos valores típicos, de la familia TTL:
tf =20 ns ; tsu =20 ns ; tp =15 ns que dan frecuencias de operación menores que 18 [Mhz] sin
considerar tskew. Los dispositivos CPLD y FPGA tienen frecuencias de funcionamiento mucho
mayores.
11.7. Síntesis o diseño de máquinas secuenciales sincrónicas, a partir del diagrama
de estados.
El problema que deseamos resolver es obtener las redes combinacionales que programan los
flip-flops de una red secuencial, a partir del diagrama de estados, reducido y con asignación de
estados. De estas ecuaciones puede obtenerse el esquemático, o el programa verilog para la
implementación física.
11.7.1. Procedimiento de síntesis tabular.
A partir de la tabla de transiciones, con la ayuda de la tabla de excitaciones de los flip-flops, se
obtienen las (m+1) matrices de control de los flip-flops. Y mediante éstas, se determinan los
programas de los flip-flops. En el esquema de la Figura 11.16, se muestra la generación del
programa del flip-flop JK i-ésimo solamente.
Esquemáticamente:
Figura 11.16. Esquema general de síntesis
Si se tienen (n+1) entradas y (m+1) flip-flops, los vectores booleanos de la entrada y el estado
quedan representados por:
( , )i iJ f y x
( , )i iK g y x y(k+1)
y(k)
x(k)
y(k) y(k+1) JK
y
x
Ji, Ki
Matriz de control Programas

12 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
0 1( , ,..., )nx x x x
0 1( , ,..., )my y y y
En el esquema anterior se ilustra empleando flip-flops de tipo JK, se procede en forma similar si
los flip-flops son de otro tipo. Se eliminan las variables de próximo estado, obteniéndose las
matrices de programación.
Resumen de las tablas de excitaciones para diversos flip-flops.
Q(k) Q(k+1) D J K T S R
0 0 0 0 0 0
0 1 1 1 1 1 0
1 0 0 1 1 0 1
1 1 1 0 0 0
Figura 11.17. Tablas de excitaciones para diferentes flip-flops.
Luego, en el Capítulo 14, se verán los flip-flops SR, cuyas tablas se indican en las últimas dos
columnas de la Figura 11.17.
11.7.2. Procedimiento de síntesis analítico.
Se escriben las ecuaciones características de los flip-flops; y se escriben las ecuaciones de
próximos estados, a partir de la tabla de transiciones.
Por comparación de coeficientes se determinan las funciones Ji y Ki, si se emplean flip-flops de
este tipo. Lo que se efectúa es la eliminación de las variables de próximo estado.
11.8. Ejemplos de síntesis.
Ejemplo 11.8.1.
Para el detector de secuencia 110 cada vez que ésta se presente, se tiene:
Figura 11.18. Detector de secuencia 110.
1 / 0 0 / 0
0 / 0
0 / 1
START
Estado 0
Estado 1
1 / 0
1 / 0
reset

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 13
Profesor Leopoldo Silva Bijit 19-01-2010
Con la siguiente asignación de estados, se obtiene la matriz de transiciones:
Estado Q1 Q0
Start 0 0
Estado 0 0 1
Estado 1 1 1
Figura 11.19. Asignación de estados y matriz de transiciones.
Notar la elección de condiciones superfluas para el estado 10, que no se emplea en el diseño. Se
escogió el estado de start como el 00, para simplificar el diseño de la señal reset; en este caso
basta activar la señal clear asincrónico del flip-flop que se emplee para lograr la función reset.
La elección de condiciones superfluas simplifican las redes combinacionales que efectúan los
programas de los flip-flops.
a) Procedimiento tabular empleando flip-flops Ds:
Usando la tabla de transiciones de flip-flops Ds, se logra:
Figura 11.20. Programas de flip-flops D
Con programas: D1 = Q0 x
D0 = x
Debe notarse que cuando se emplean flip-flops D, los programas de éstos pueden obtenerse
directamente de la matriz de transiciones, cambiando Q1+ por D1 y Q0+ por D0.
b) Método analítico empleando flip-flops Ds:
De la matriz de transiciones se tienen:
z = Q1 x'
Q0+ = x
Q1+ = Q0 x
De los flip-flops Ds:
Q1+ = D1
Q0+ = D0
x
Q1 Q0 0 1
0 0 00 01
0 1 00 11
1 1 00 11
1 0 dd dd
D1D0
x
Q1 Q0 0 1
0 0 00/0 01/0
0 1 00/0 11/0
1 1 00/1 11/0
1 0 dd/d dd/d
Q1+Q0+/z

14 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Comparando coeficientes se logra igual resultado que el anterior.
c) Procedimiento tabular empleando flip-flops JKs:
Empleando flip-flops JK, de la matriz de transiciones de la Figura 11.19, se obtienen:
Figura 11.21. Programas de flip-flops JK
Leyendo los mapas, considerando las condiciones superfluas, resultan:
J1 = Q0 x; K1 = x'; J0 = x; K0 = x'
Notar que K1 también se podría haber expresado, como: K1 = x' +Q0' agrupando los ceros, o
bien: K1 = x’Q0 agrupando los unos; sin aprovechar completamente las condiciones superfluas.
d) Método analítico empleando flip-flops JKs:
De la matriz de transiciones de la Figura 11.19, y aplicando el teorema de expansión, para tener
presente a la derecha la variable correspondiente, que figura a la izquierda de cada ecuación, se
logra:
z = Q1 x'
Q1+ = Q0 x = Q0xQ1' + Q0xQ1 (se expande en Q1)
Q0+ = x = xQ0' + xQ0 (se expande en Q0)
De los flip-flops JKs, se tienen las siguientes ecuaciones:
Q1+ = J1Q1' +K1'Q1
Q0+ = J0Q0' +K0'Q0
Comparando los coeficientes, se obtienen:
J1 = Q0 x ; K1 = Q0' + x'; J0 = x; K0 = x'
Notar que el método analítico, en este caso, agrega el término Q0' que resulta superfluo.
Como se puede apreciar en el ejemplo anterior, el procedimiento tabular es capaz de generar
expresiones más reducidas que el procedimiento analítico. Esto se debe a que en este último la
reducción se efectúa empleando las ecuaciones características y no se pueden aprovechar las
condiciones superfluas que aparecen en las tablas de excitaciones de los flip-flops JKs.
En caso de diseñar empleando flip-flops JK y si la tabla de transiciones tiene condiciones
superfluas, debido a estados no empleados, conviene usar el método tabular.
x
Q1 Q0 0 1
0 0 0 1
0 1 1 0
1 1 1 0
1 0
J0K0
x
Q1 Q0 0 1
0 0 0 0
0 1 0 1
1 1 1 0
1 0
J1K1

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 15
Profesor Leopoldo Silva Bijit 19-01-2010
La matriz de transiciones de la Figura 11.20, puede plantearse como una tabla de verdad, entre
las entradas (estado presente y entradas) y las salidas (próximo estado y salidas), según se
muestra en la Figura 11.22.
Figura 11.22. Matriz de transiciones.
e) Descripción del diseño en Verilog.
Una vez realizado el diseño, pueden describirse las redes combinacionales mediante su
estructura de compuertas, empleando el comando assign; y los flip-flops con un proceso
activado por los cantos del reloj. Los nombres de los procesos se definen en la Figura 11.1.
// detector de secuencia 110 cada vez que ésta se presente.
module mealy110 (input clk, resetn, x, output z);
reg Q1, Q0;
wire D1, D0;
// Redes combinacionales de próximo estado y de salida. Proceso P1
assign D1 = Q0&x;
assign D0 = x;
assign z = Q1&(~x); //salida asincrónica
// Proceso registro. P2
always @(negedge resetn or posedge clk)
if (resetn == 0) begin Q1=0; Q0=0; end
else begin Q1<= D1; Q0 <= D0; end
endmodule
Si se desea eliminar la salida asincrónica z, característica de las máquinas de Mealy, suele
registrarse la salida en un flip-flop. Esto agrega un elemento de memoria a la red booleana.
// detector de secuencia 110 cada vez que ésta se presente. Salida registrada.
module mealy110 (input clk, resetn, x, output zs);
reg Q1, Q0, zs;
wire D1, D0;
// Redes combinacionales de próximo estado. P1
Entradas Salidas
Q0 Q1 x Q1+ Q2+ z
0 0 0 0 0 0
0 0 1 0 1 0
0 1 0 0 0 0
0 1 1 1 1 0
1 0 0 d d d
1 0 1 d d d
1 1 0 1 0 1
1 1 1 1 1 0

16 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
assign D1 = Q0&x;
assign D0 = x;
// Proceso registro. P2. Salida sincronizada.
always @(negedge resetn or posedge clk)
if (resetn == 0) begin Q1=0; Q0=0; end
else begin Q1<= D1; Q0 <= D0; zs<=Q1&(~x); end
endmodule
Figura 11.22a. Salida asincrónica z, y salida sincrónica zs.
La Figura 11.22a, muestra la diferencia entre z y zs.
Ejemplo 11.8.2.
Determinar los programas de los flip-flops JK, para la siguiente matriz de transiciones.
Figura 11.23. Matriz de transiciones ejemplo 11.8.2.
Se tienen, de la matriz:
A+ = A'x + AB +Ax' = ( x )A' + (B + x') A
B+ = A'x + ABx' +B'x = A'xB' + A'xB + ABx' +B'x = (A'x + x) B' + (A'x + Ax')B
Se han factorizado las ecuaciones, en términos de Qi y Qi’ para cada uno de los flip-flops Qi.
De los flip-flops, se tienen:
A+ = JaA' +Ka'A
B+ = JbB' +Kb'B
Comparando coeficientes, de los dos conjuntos de ecuaciones anteriores, resultan:
Ja = x ; Ka = (B + x')' = B'x ;
Jb = A'x +x = x ; Kb = (A'x +Ax')' = A'x' + Ax
x
AB 00 01
0
1
00 00
11 11 1
0 2
3
11 10
11 10
10 01 7
6 4
5
A+B+

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 17
Profesor Leopoldo Silva Bijit 19-01-2010
Ejemplo 11.8.3.
Diseñar máquina secuencial, que implemente la siguiente matriz de transiciones, empleando un
flip-flop D, para la variable A; y un JK para B.
Figura 11.24. Matriz de transiciones ejemplo 11.8.3
Es una máquina de Mealy, ya que: z = Ax +B x' (la salida depende de la entrada)
Con flip-flop D para el estado A, se obtiene:
A+ = Da = AB + Bx (directamente del mapa)
Con flip-flop JK para la variable B, se logra:
B+ = JbB' +Kb'B ecuación del flip-flop JK.
Del mapa se tiene:
B+ = B x + Ax + A'B'x' = B x + ABx + AB'x +A'B'x' = (Ax+A'x') B' +(x + Ax) B
B+ = ( A' x) B' + xB
Comparando coeficientes, se logra:
Jb = A' x Kb = x'
Ejemplo 11.8.4.
Diseñar un flip-flop JK empleando compuertas y un flip-flop D.
Es preciso especificar el diagrama de estados o la matriz de transiciones de lo que se desea
diseñar; en este caso representaremos al flip-flop JK por su ecuación característica.
De la matriz de transiciones del flip-flop JK se tiene la siguiente ecuación:
Q+ = JQ' + K'Q
El programa del flip-flop D, resulta efectuando Q+=D:
D = JQ' + K'Q
x
AB
00 01
0
1
010 001
000 110 1
0 2
3
11 10
101 000
111 011 7
6 4
5
A+ B+ z

18 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
reloj
J D
Q'
Q
K
Q
Figura 11.25. JK basado en flip-flop D
Este diseño se emplea en dispositivos programables que no disponen en las macroceldas de flip-
flops JKs, pero que generalmente disponen de flip-flops Ds.
El diagrama de la Figura 11.26, muestra la implementación de un JK, mediante un dispositivo
lógico programable, que sólo tiene flip-flops de tipo D en su estructura interna:
Figura 11.26. Implementación de JK en CPLD
11.9 Resumen y observaciones.
Se analiza una máquina sencilla, mostrando y resumiendo una metodología de diseño.
11.9.1. Convertidor de cambio de nivel en un pulso.
Se desea convertir un canto de subida en un pulso de ancho fijo. Se trata de un detector
sincrónico de cantos de subida, que no dependa de cuánto tiempo permanezca alta la señal de
entrada. La salida genera un pulso simple de ancho igual al período del reloj, y que puede
alimentar con seguridad a un contador.
D
reloj
D Q Q
J Q.f
b K

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 19
Profesor Leopoldo Silva Bijit 19-01-2010
clk
p n
Figura 11.27. De cantos de subida a pulsos.
Consideramos que a la señal n, que resulta de oprimir un botón, se le han suprimido los rebotes,
y que además está sincronizada, es decir el canto de subida se produce después de que ha
transcurrido un tiempo mayor que el thold de los flip-flops.
Los rebotes pueden filtrarse con un latch, y la sincronización se logra haciendo pasar la señal a
través de uno o dos flip-flops Ds alimentados con el mismo reloj.
11.9.2. Modelo de Moore.
Si la salida está asociada al estado, tendremos tres situaciones distinguibles. La primera cuando
se espera un canto de subida con salida cero, la segunda cuando llega un canto de subida con
salida uno, y la tercera cuando se espera un canto de bajada con salida cero.
Si agregamos las condiciones bajo las cuales se cambia de estado, podemos describir que:
Mientras la señal de nivel n, está baja, se permanece en el estado ECS, esperando un canto de
subida, con salida p=0. Cuando en n se presenta un canto de subida se pasa al estado CS, llegó
un canto de subida, con salida p=1.
Estando en CS, si la señal n baja a cero, vuelve a esperar otro canto de subida; es decir pasa al
estado ECS; pero si la señal permanece en nivel alto, pasa a un tercer estado ECB, en el cual se
espera un canto de bajada.
Estando en ECB con salida p=0, se permanece en ese estado mientras la señal n esté alta, y se
pasa a ECS cuando llega un canto de bajada en n.
La descripción anterior puede formalizarse con el siguiente diagrama de estados.
n=0
n=1
ECS
p=0
CS
p=1
ECB
p=0
n=1
n=1
n=0
n=0
reset
Figura 11.28. Modelo de Moore, convertidor de cantos.
Con la siguiente codificación binaria de los estados:

20 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Estado Q1 Q0
ECS 0 0
CS 0 1
ECB 1 1
Figura 11.29. Asignación de estados.
Se logra la siguiente matriz de transiciones:
Estado
actual
Próximo
estado
Q1 Q0 n Q1+ Q0+ p
0 0 0 0 0 0
0 0 1 0 1 0
0 1 0 0 0 1
0 1 1 1 1 1
1 1 0 0 0 0
1 1 1 1 1 0
1 0 0 x x x
1 0 1 x x x
Figura 11.30. Matriz de transiciones.
De la cual pueden obtenerse las ecuaciones de la red combinacional:
Q1+=nQ0 Q0+=n p=Q1’Q0
Empleando flip-flops Ds, se tienen:
D1=Q1+, D0=Q0+
Con las cuales resulta el siguiente diseño:
D1=nQ0 D0=n p=Q1’Q0
D
Q1
reset’
D
Q0
n
clk
p
Q1’
Figura 11.31. Diseño de Moore.

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 21
Profesor Leopoldo Silva Bijit 19-01-2010
11.9.3. Modelo de Mealy.
Si la salida está asociada a los cambios de entrada podemos conceptualizar dos estados: uno en
el que se espera un canto de subida, y el otro cuando se espera el canto de bajada.
Estando en ECS: Mientras la entrada esté baja, la salida también debe estar baja y debe
permanecer en ECS; cuando en la entrada se presenta un canto de subida la salida debe activarse
a uno y cambiar al estado ECB.
Estando en ECB: Mientras la entrada esté alta, la salida también debe estar baja y permanecer
en ECB; cuando en la entrada se presenta un canto de bajada la salida debe permanecer baja y
cambiar al estado ECB.
Una descripción formal, de lo anterior se muestra en el siguiente diagrama de estados:
n=0/p=0
n=1/p=1
ECS ECB n=1/p=0 n=0/p=0
reset
Figura 11.32. Diagrama de estados de Mealy.
Si denominamos con 0 al estado ECS y con 1 al estado ECB, se obtiene:
Q n Q+ p
0 0 0 0
0 1 1 1
1 0 0 0
1 1 1 0
Figura 11.33. Matriz de transiciones de Mealy.
De la matriz de transiciones, se obtiene:
Q+=n, p=Q’n
Empleando un flip-flop D, se tiene: D= Q+
Con lo cual se obtiene el siguiente diseño:
D=n, p=Q’n

22 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
D
Q
reset’
n
clk
Q’
p
Figura 11.34. Diseño de Mealy.
11.9.4. Análisis de transiciones.
a) Estado inicial. Reset.
En el diseño de la Figura 11.31, se lleva al estado inicial, mediante un pulso asincrónico de
reset, el cual se aplica a ambos flip-flops, ya que el estado inicial es Q1=0 y Q0=0.
En un circuito físico, cuando se aplica un canto de bajada a la señal reset’, las salidas de los
flop-flops van a cero, llevando la máquina al estado inicial.
reset’
clk
Q0
p
Q1
n
tr
Figura 11.35. Activación de señal reset.
La salida, en el caso de Moore, tomará el valor correspondiente al estado inicial. Las entradas
son ignoradas hasta el primer canto del reloj, luego que se levante la señal de reset, lo cual se
indica con el instante tr, en la Figura 11.35. Se ilustra con una discontinuidad el tiempo que
dura la señal reset en nivel bajo, mostrando que esta situación puede durar varios períodos del
reloj.
En el instante tr, se muestrean las entradas y de acuerdo a éstas se producen los cambios de
estado. En la Figura 11.35 se asumió un nivel bajo de la entrada n, de este modo la máquina
permanece en estado inicial, esperando un canto de subida.
En un modelo de Mealy, la situación es similar para los estados de los flip-flops, pero la salida
dependerá de la entrada, mientras la señal de reset esté baja.
En caso de señales sincrónicas, la situación es similar, salvo que los cambios en los flip-flops se
producen en el siguiente pulso del reloj después de la activación del reset.

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 23
Profesor Leopoldo Silva Bijit 19-01-2010
En simulación, deben generarse un pulso de reset, para que los flip-flops y las salidas tomen
valores. En caso de no hacerlo, puede que los flip-flops tomen valores desconocidos y no se
generen las secuencias que se desea simular. En un circuito físico, los flip-flops siempre estarán
en algún valor, después de aplicar la polarización.
b) Modelo de Moore.
Para un canto de subida en n, que cumpla con los requerimientos de hold, se tienen:
Q0 cambia un tiempo de propagación de flip-flop, después del canto de subida del reloj.
La salida p, cambia un tiempo de propagación de una compuerta AND, después de cambios en
Q1 o Q0.
El cambio de p se produce en el primer canto del reloj en el cual se tenga la entrada n en alto.
n
clk
Q0
p
Q1
Figura 11.36. Transiciones modelo de Moore.
c) Modelo de Mealy.
En el modelo de Mealy, la salida cambia cuando cambia la entrada, y suele producirse un ciclo
antes que en el modelo de Moore.
El cambio de estado se produce, un tiempo de propagación de flip-flop, después del canto de
subida del reloj.
n
clk
Q
p
Figura 11.37. Transiciones modelo de Mealy.
En el modelo de Mealy suelen requerirse menos flip-flops, y genera la salida un tiempo antes
que en modelo de Moore. Sin embargo la salida no es sincrónica con el reloj.
d) Modelo de Mealy, con salida registrada.
Para resolver esta dificultad suele sincronizarse la salida de la máquina de Mealy, registrando la
salida en un flip-flop adicional.

24 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
D
Q
reset’
n
clk
Q’
p
D
Q
Q’
ps
Figura 11.38. Diseño Mealy con salida sincrónica.
Lo cual retrasa la activación de la salida ps, pero la deja sincrónica.
n
clk
Q
p
ps
Figura 11.39. Transiciones Mealy con salida sincrónica.
e) Modelo de Moore, con salida registrada.
En la Figura 11.31, la salida p es generada a través de un circuito combinacional, que es
alimentado por las salidas de los flip-flops. Debido a que los tiempos de propagación desde el
canto hasta la salida de los flip-flops pueden tener pequeñas variaciones, el diseño presentará
glitches o perturbaciones, debido a las carreras de las entradas al circuito combinacional.
Se denomina glitch (del alemán glitschen, con el significado de deslizar) a un pulso de corta
duración, que generalmente es el resultado de una falla en el diseño. También se denominan
spikes (del inglés, punta delgada), pero este término es más adecuado a la generación de
pequeños pulsos no deseados, debidos a interferencias.
La salida puede generarse con las condiciones del estado próximo, y empleando un flip-flop
para sincronizar la salida.
Antes teníamos: Q1+=nQ0 Q0+=n p=Q1’Q0
Entonces se genera p+ según:
p+=(Q1+)’(Q0+) = (nQ0)’n = (n’+Q0’)n= nQ0’
El diseño se representa en la Figura 11.40.

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 25
Profesor Leopoldo Silva Bijit 19-01-2010
D
Q1
reset’
D
Q0
n
clk
p+
Q1’ Q0’
D
Q
Q’
ps
Figura 11.40. Modelo de Moore. Salida registrada.
La salida ps, se produce en los mismos tiempos que en el modelo de Moore de la Figura 11.31,
pero se requiere un flip-flop adicional. Debe notarse que ps será sincrónica y no tendrá
perturbaciones.
En la Figura 11.41, se muestran las señales p+ y ps. Se ha dejado la señal p, del diseño anterior,
para comparar los casos.
n
clk
Q0
p
Q1
p+
ps
Figura 11.41. Formas de ondas modelo de Moore. Salida registrada.
Problemas resueltos.
Problema 11.1.
Generar la señal s0 a partir de la señal CLK.
a) Determinar la matriz de transiciones.
b) Determinar las ecuaciones minimizadas de próximo estado.
c) Determinar los programas de los flip-flops, asumiendo que Q0 y Q1 son de tipo D,
y que Q2 y Q3 son de tipo JK.
d) Determinar la ecuación minimizada de la salida s0.

26 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
CLK
Q0
Q1
Q2
Q3
s0
Período
0 1 2 3 4 5 6 7 8 9 10 0
Figura P11.1. Formas de ondas Problema 11.1
Solución.
a) Las señales Q3, Q2, Q1 y Q0 corresponden a un contador módulo 11. Con Q3 el bit
más significativo.
Figura P11.2. Matriz de transiciones Problema 11.1.
b) Q3+ = (Q2 Q1 Q0) + (Q3 Q1’)
Q2+ = (Q2’ Q1 Q0) + (Q2 Q1’) + (Q2 Q0’)
Q1+ = (Q3’ Q1 Q0’) + (Q1’ Q0)
Q0+ = (Q1’Q0’) + (Q3’Q0’)
Se han agrupado considerando las condiciones superfluas.
Arreglando las ecuaciones de próximo estado se obtiene para cada tipo de flip-flop:
c) Q3 + = (Q2 Q1 Q0) + (Q3 Q1’) = Q3(Q2Q1Q0 + Q1’) + Q3’Q2Q1Q0
Q3+ = Q3’ J3 + Q3 K3’
Comparando coeficientes, se obtiene:
J3 = Q2Q1Q0 K3 = (Q2Q1Q0 + Q1’) ’ = Q1 (Q2’ +Q1’ +Q0’) = Q1Q2’ +Q1Q0’
Q1Q0 Q3Q2
00 01
00
01
0001 0101
0010 0110 1
0 4
5
11 10
dddd 1001
dddd 1010 13
12 8
9
11
10
0100 1000
0011 0111 2
3 7
6
dddd dddd
dddd 0000 14
15 11
10
Q3+ Q2+ Q1+ Q0+

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 27
Profesor Leopoldo Silva Bijit 19-01-2010
Q2+ = (Q1 Q2’Q0) + (Q1’ Q2) + (Q2 Q0’) = Q2’(Q1Q0) +Q2(Q1’ +Q0’)
Q2+ = Q2’ J2 +Q2 K2’
Comparando coeficientes, se obtiene:
J2 = Q1Q0 K2 = (Q1’ +Q0’)’ = Q1Q0
Si el flip-flop 2 hubiese sido de tipo T, se tendría: T2 = Q1Q0
Q1+ = D1 D1 = (Q3’ Q1 Q0’) + (Q1’ Q0)
Q0+ = D0 D0 = (Q1’Q0’) + (Q3’Q0’)
d) La salida es alta en los tiempos 2, 8 y 9. Se obtiene el mapa:
Figura P11.3. Mapa de la salida s0, Problema 11.1
Empleando las condiciones superfluas en la minimización, se logra:
s0 = (Q3’Q2’Q1Q0’) + (Q3 Q1’)
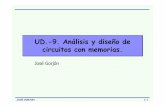
Problema 11.2.
Se tiene el siguiente esquemático:
Q1Q0 Q3Q2
00 01
00
01
0 0
0 0 1
0 4
5
11 10
d 1
d 1 13
12 8
9
11
10
0 0
1 0 2
3 7
6
d d
d 0 14
15 11
10
s0

28 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Figura P11.4. Esquemático Problema 11.2.
a) Obtener las ecuaciones de entradas de los flip-flops.
b) Obtener la matrices de programación de cada flip-flop
c) Obtener la matriz de transiciones.
d) Obtener el diagrama de estados. Usar la asignación:
Estado AB
0 00
1 01
2 10
3 11
e) Qué realiza la máquina secuencial.
f) Determinar la secuencia de salida para la siguiente secuencia de entrada:
0100110011100101 con estado inicial A=0 y B=0.
Solución:
a) Ecuaciones de entrada de los flip-flops:
xJ A BxK A
xJ B AxK B BxABxAz (Mealy)
b) Matrices de programación:
x
z
V3 5V
Reset 0V
S J CP K R Q _ Q
B
S J CP K R Q _ Q
A
TP1
TP2 TP3
U4B
U4A
U3C
U3B
U3A
U2A
CP1
Data Seq
DS1
CP1

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 29
Profesor Leopoldo Silva Bijit 19-01-2010
x
AB
0
1
x
AB
0
1
00 11 00 00 00 11
01 11 01 01 00 11
11 11 01 11 01 11
10 11 00 10 01 11
Ja, Ka Jb, Kb
Figura P11.5. Matrices de programación Problema 11.2.
c) Tabla característica y Matriz de transiciones:
J
K
Q(k+1)
x
AB
0
1
0 0 )(kQ 00 10/0 01/0
0 1 0 01 11/0 00/1
1 0 1 11 00/0 00/0
1 1 )(kQ 10 00/1 11/0
A(k+1) B(k+1)/z
Figura P11.6. Matriz de transiciones Problema 11.2.
Usando las asignaciones de estados, se obtiene:
x
AB 0 1
0 2/0 1/0
1 3/0 0/1
3 0/0 0/0
2 0/1 3/0
Próximo Estado/z
Figura P11.7. Matriz de transiciones Problema 11.2.
d) Diagrama de estados:

30 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Figura P11.8. Diagrama de estados Problema 11.2.
e) Funcionamiento:
Salida z = 1 cuando llegan secuencias: 00 ó 11 a partir de estado inicial.
Salida z = 0 cuando llegan las secuencias: 010, 011, 100, 101 a partir del estado inicial.
Estando en estado 0, si llegan las secuencias 01 y 10 se descarta el bit siguiente.
f) Secuencia de salida:
x = 0100110011100101
z = 0000000101000000
0
3
1 2
0/1 1/1
/0
0/0
0/0
1/0
1/0

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 31
Profesor Leopoldo Silva Bijit 19-01-2010
Ejercicios propuestos.
Ejercicio 11.1
Rediseñar el diagrama de estados de la Figura 11.6 considerando que los estados inalcanzables
(2, 3, 5) son superfluos. Realizar el diseño con flip-flops JKs y comparar el costo de las nuevas
redes combinacionales.
x
Estado actual 0 1
0 4/0 1/0
1 6/0 7/0
3 / /
2 / /
6 0/0 0/0
7 0/0 0/1
5 / /
4 6/0 6/0
Estado próximo/z
Figura E11.1. Matriz de transiciones Ejercicio 11.1.

32 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Índice general.
CAPÍTULO 11 ............................................................................................................................................ 1
ANÁLISIS Y DISEÑO DE MÁQUINAS SECUENCIALES SINCRÓNICAS ..................................... 1
11.1. ANÁLISIS .......................................................................................................................................... 1 Programas de los flip-flops. Matrices de programación ..................................................................... 2
11.2. MÉTODO DE ANÁLISIS TABULAR ....................................................................................................... 2 11.3. MÉTODO ANALÍTICO. ........................................................................................................................ 3 11.4. EJEMPLO MÉTODO TABULAR ............................................................................................................ 3 11.5. EJEMPLOS DEL MÉTODO ANALÍTICO. ................................................................................................ 7 11.6. FRECUENCIA MÁXIMA DE OPERACIÓN DEL RELOJ. ............................................................................ 9 11.7. SÍNTESIS O DISEÑO DE MÁQUINAS SECUENCIALES SINCRÓNICAS, A PARTIR DEL DIAGRAMA DE
ESTADOS. ................................................................................................................................................ 11 11.7.1. PROCEDIMIENTO DE SÍNTESIS TABULAR. ..................................................................................... 11 11.7.2. PROCEDIMIENTO DE SÍNTESIS ANALÍTICO. ................................................................................... 12 11.8. EJEMPLOS DE SÍNTESIS. .................................................................................................................. 12
Ejemplo 11.8.1. .................................................................................................................................. 12 a) Procedimiento tabular empleando flip-flops Ds: ........................................................................................ 13 b) Método analítico empleando flip-flops Ds: ................................................................................................ 13 c) Procedimiento tabular empleando flip-flops JKs: ...................................................................................... 14 d) Método analítico empleando flip-flops JKs: .............................................................................................. 14 e) Descripción del diseño en Verilog. ............................................................................................................ 15
Ejemplo 11.8.2. .................................................................................................................................. 16 Ejemplo 11.8.3. .................................................................................................................................. 17 Ejemplo 11.8.4. .................................................................................................................................. 17
11.9 RESUMEN Y OBSERVACIONES. ......................................................................................................... 18 11.9.1. Convertidor de cambio de nivel en un pulso. ......................................................................... 18 11.9.2. Modelo de Moore. .................................................................................................................. 19 11.9.3. Modelo de Mealy. ................................................................................................................... 21 11.9.4. Análisis de transiciones.......................................................................................................... 22
a) Estado inicial. Reset. .................................................................................................................................. 22 b) Modelo de Moore. ..................................................................................................................................... 23 c) Modelo de Mealy. ...................................................................................................................................... 23 d) Modelo de Mealy, con salida registrada. ................................................................................................... 23 e) Modelo de Moore, con salida registrada. ................................................................................................... 24
PROBLEMAS RESUELTOS. ........................................................................................................................ 25 Problema 11.1. ................................................................................................................................... 25 Problema 11.2. ................................................................................................................................... 27
EJERCICIOS PROPUESTOS. ........................................................................................................................ 31 Ejercicio 11.1 ..................................................................................................................................... 31
ÍNDICE GENERAL. .................................................................................................................................... 32 ÍNDICE DE FIGURAS ................................................................................................................................. 33

Capítulo 11. Análisis y Diseño de máquinas secuenciales sincrónicas 33
Profesor Leopoldo Silva Bijit 19-01-2010
Índice de figuras
Figura 11.1. Esquema de máquina secuencial. .............................................................................. 1 Figura 11.2. Esquema análisis tabular ........................................................................................... 2 Figura 11.3. Ejemplo de máquina secuencial empleando flip-flops JK ........................................ 3 Figura 11.4. Matrices de Programación ........................................................................................ 4 Figura 11.5. Matriz de transiciones del Ejemplo 11.4. .................................................................. 5 Figura 11.6. Diagrama de estados ejemplo 11.3 ........................................................................... 6 Figura 11.7. Diagrama de estados reducido. ................................................................................. 6 Figura 11.8. Matriz de transiciones, empleando método analítico. ............................................... 7 Figura 11.9. Entradas y salidas de máquina secuencial. ................................................................ 8 Figura 11.10. Tabla de transiciones ejemplo 11.5.b ...................................................................... 8 Figura 11.11. Ecuaciones de salidas. ............................................................................................. 9 Figura 11.12. Asignación de estados simbólicos........................................................................... 9 Figura 11.13. Diagrama de estados de Mealy ............................................................................... 9 Figura 11.14. Definición de tiempos de propagación. ................................................................. 10 Figura 11.15. Ciclos del reloj ...................................................................................................... 10 Figura 11.16. Esquema general de síntesis .................................................................................. 11 Figura 11.17. Tablas de excitaciones para diferentes flip-flops. ................................................. 12 Figura 11.18. Detector de secuencia 110..................................................................................... 12 Figura 11.19. Asignación de estados y matriz de transiciones. ................................................... 13 Figura 11.20. Programas de flip-flops D ..................................................................................... 13 Figura 11.21. Programas de flip-flops JK ................................................................................... 14 Figura 11.22. Matriz de transiciones. .......................................................................................... 15 Figura 11.22a. Salida asincrónica z, y salida sincrónica zs. ........................................................ 16 Figura 11.23. Matriz de transiciones ejemplo 11.8.2. ................................................................. 16 Figura 11.24. Matriz de transiciones ejemplo 11.8.3 .................................................................. 17 Figura 11.25. JK basado en flip-flop D ....................................................................................... 18 Figura 11.26. Implementación de JK en CPLD .......................................................................... 18 Figura 11.27. De cantos de subida a pulsos................................................................................. 19 Figura 11.28. Modelo de Moore, convertidor de cantos. ............................................................ 19 Figura 11.29. Asignación de estados. .......................................................................................... 20 Figura 11.30. Matriz de transiciones. .......................................................................................... 20 Figura 11.31. Diseño de Moore. .................................................................................................. 20 Figura 11.32. Diagrama de estados de Mealy. ............................................................................ 21 Figura 11.33. Matriz de transiciones de Mealy. .......................................................................... 21 Figura 11.34. Diseño de Mealy. .................................................................................................. 22 Figura 11.35. Activación de señal reset....................................................................................... 22 Figura 11.36. Transiciones modelo de Moore. ............................................................................ 23 Figura 11.37. Transiciones modelo de Mealy. ............................................................................ 23 Figura 11.38. Diseño Mealy con salida sincrónica. ..................................................................... 24 Figura 11.39. Transiciones Mealy con salida sincrónica. ........................................................... 24 Figura 11.40. Modelo de Moore. Salida registrada. .................................................................... 25 Figura 11.41. Formas de ondas modelo de Moore. Salida registrada. ........................................ 25 Figura P11.1. Formas de ondas Problema 11.1 ........................................................................... 26

34 Sistemas Digitales
Profesor Leopoldo Silva Bijit 19-01-2010
Figura P11.2. Matriz de transiciones Problema 11.1. .................................................................. 26 Figura P11.3. Mapa de la salida s0, Problema 11.1 ..................................................................... 27 Figura P11.4. Esquemático Problema 11.2. ................................................................................. 28 Figura P11.5. Matrices de programación Problema 11.2. ........................................................... 29 Figura P11.6. Matriz de transiciones Problema 11.2. .................................................................. 29 Figura P11.7. Matriz de transiciones Problema 11.2. .................................................................. 29 Figura P11.8. Diagrama de estados Problema 11.2. .................................................................... 30 Figura E11.1. Matriz de transiciones Ejercicio 11.1. .................................................................. 31