
ALGORITMO PARA LA DETECCIÓN, CLASIFICACIÓN Y...
113
ALGORITMO PARA LA DETECCIÓN, CLASIFICACIÓN Y LOCALIZACIÓN DE CUALQUIER TIPO DE EMBARCACIÓN UTILIZANDO UN HIDRÓFONO. DAVID PÉREZ ZAPATA LUIS ESTEBAN GÓMEZ CADAVID UNIVERSIDAD DE SAN BUENAVENTURA SECCIONAL MEDELLÍN FACULTAD DE INGENIERÍAS INGENIERÍA DE SONIDO MEDELLÍN 2015
Transcript of ALGORITMO PARA LA DETECCIÓN, CLASIFICACIÓN Y...
ALGORITMO PARA LA DETECCIÓN, CLASIFICACIÓN Y LOCALIZACIÓN DE
CUALQUIER TIPO DE EMBARCACIÓN UTILIZANDO UN HIDRÓFONO.
DAVID PÉREZ ZAPATA
LUIS ESTEBAN GÓMEZ CADAVID
UNIVERSIDAD DE SAN BUENAVENTURA SECCIONAL MEDELLÍN
FACULTAD DE INGENIERÍAS
INGENIERÍA DE SONIDO
MEDELLÍN
2015
ALGORITMO PARA LA DETECCIÓN, CLASIFICACIÓN Y LOCALIZACIÓN DE
CUALQUIER TIPO DE EMBARCACIÓN UTILIZANDO UN HIDRÓFONO.
DAVID PÉREZ ZAPATA.
LUIS ESTEBAN GÓMEZ CADAVID
Anteproyecto presentado para optar al título de Ingeniero de sonido
Asesor
Luis Alberto Tafur Jiménez, Ms.C. en sonido y vibraciones.
UNIVERSIDAD DE SAN BUENAVENTURA SECCIONAL MEDELLÍN
FACULTAD DE INGENIERÍAS
INGENIERÍA DE SONIDO
2015

YO CANTO
Hoy canto por la vida que lucha sin parar, y canto por el muerto que no resucitará.
Canto para que la guerra deje de ser, y por la sonrisa del niño que se ve crecer en los lindos
jardines de aquel edén.
Canto para que el sol siempre esté brillando, y de buena energía al que combate,
con palabras de paz que lleguen al corazón, y vibren en las almas oscuras que no tienen razón.
Canto por la vida que lucha sin parar,
que da sonrisas al mundo y hacen ver brillar de lejos una luna que siempre estará
con los enamorados como su confidencial.
Y canto por las nubes que siempre existirán, moviéndose en el espacio y que inspirarán
a aquel poeta, que desde su ventana las ve pasar.
Y canto la alegría de la vida y a las estrellas que sirven de guía y aquellas que de lejos brillan más.
Las canto más en mi alma porque servirán de motivo para ser alcanzadas.
DAYAN ALEXIS MONTOYA MORALES

DEDICATORIA
A mis padres Martha y Jairo,
por su infinito sacrificio y sus constantes enseñanzas.
A mi padre Guillermo por su esfuerzo y entrega;
a mi madre Luz Ángela por ser motivo de inspiración
y llenarme la vida de color.
AGRADECIMIENTOS
Agradecemos principalmente a MSc. Luis Alberto Tafur Jiménez por brindarnos la
confianza de trabajar en este proyecto, por ser guía en las decisiones a tomar y
apoyarnos en cada circunstancia. Agradecemos también a MSc. Héctor García
Mayén por su disponibilidad y ayuda cada vez que a él recurrimos. Igualmente
agradecemos a algunos compañeros de la academia quienes nos acompañaron en
mediciones en pro al proyecto y a todos los que de una forma u otra formaron parte
de todo este proceso.
6
Tabla de contenido
1. Introducción. ................................................................................................... 12
2. Objetivos del proyecto. ................................................................................... 14
2.1 Objetivo general. ..................................................................................... 14
2.2 Objetivos específicos. .............................................................................. 14
3. Marco referencial. ........................................................................................... 15
3.1 Estado del arte. ....................................................................................... 15
3.2 Marco conceptual. ................................................................................... 21
3.2.1 Propagación acústica en el mar. ...................................................... 21
3.2.2 Factores de atenuación. ................................................................... 21
3.2.3 Velocidad del Sonido. ....................................................................... 23
3.2.4 Propagación de una onda acústica en el agua en función de la
profundidad. .................................................................................................... 23
3.2.5 Señales determinísticas. .................................................................. 24
3.2.6 Señales Estocásticas. ...................................................................... 25
3.2.7 Parámetros estadísticos. .................................................................. 26
3.2.8 Fenómenos de Generación de Burbujas .......................................... 30
3.2.9 Hidrófonos. ....................................................................................... 32
3.3 Marco teórico. .......................................................................................... 33
3.3.1 Procesamiento digital de señales para obtención de firma acústica.33
3.3.2 Estimación espectral de potencia. .................................................... 39
3.3.3 Sonares. ........................................................................................... 46
4. Desarrollo del trabajo. ..................................................................................... 49
4.1 Descripción del Algoritmo y procedimiento de obtención de datos. ......... 49
4.1.1 Grabación de embarcaciones. .......................................................... 49
4.1.2 Procedimiento de grabación. ............................................................ 50
4.1.3 Codificación del algoritmo con base en el protocolo BPMN. ............ 54
4.1.4 Pruebas de funcionamiento del código. ............................................ 60
4.1.5 Corrección del código. ...................................................................... 60
4.2 Consideraciones para la extracción de una firma acústica ...................... 61
4.2.1 Comparación entre FFT y PSD. ....................................................... 61
4.2.2 Análisis espectral de los motores. .................................................... 64
4.3 Análisis espectral del ruido de ambiente. ................................................ 69
4.4 Análisis de la firma acústica para diferentes condiciones. ....................... 73
4.4.1 Extracción de la firma acústica ......................................................... 73
7
4.4.2 Desplazamientos en el dominio de la frecuencia en una firma
acústica debido a cambios de velocidad de la embarcación. ......................... 85
4.4.3 Cambios en el dominio de la frecuencia en la firma acústica debido a
diferentes condiciones de carga. .................................................................... 87
4.5 Determinación de los umbrales de detección mediante la ecuación de
Sonar Pasivo ...................................................................................................... 88
4.5.1 Umbrales de detección. .................................................................... 88
4.5.2 Estimación de distancia. ................................................................... 90
4.6 Aplicación de la correlación cruzada para la clasificación y localización . 92
4.6.1 Correlación para la discriminación entre lanchas. ............................ 92
4.6.2 Análisis de la correlación para la localización. ................................. 94
5. Conclusiones .................................................................................................. 98
6. Referencias ..................................................................................................... 99
ANEXOS
A.1 Código para la obtención de máximos de la señal.
A.2 Código para obtención de firma acústica.
A.3 Código encargado de grabación y comparación con firmas acústicas pre-
establecidas.
A.4 Código para detección de umbrales y estimación de distancia lancha Verde.
A.5 Código para detección de umbrales y estimación de distancia lancha Amarilla.
A.6 Código para la localización.
A.7 Código para el cálculo de variables estadísticas usando R (software).
8
LISTA DE TABLAS
Tabla 1. Descripción de las embarcaciones de prueba. ........................................ 50
Tabla 2. Requisitos funcionales ............................................................................. 58
Tabla 3. Requerimientos no funcionales ................................................................ 59
Tabla 4.Estadísticos para Máximos entre 451Hz y 539Hz. .................................... 77
Tabla 5. Estadísticos para Máximos entre 726Hz y 796Hz. ................................... 78
Tabla 6.Estadísticos para Máximos entre 955Hz y 1043Hz. .................................. 79
Tabla 7.Estadísticos para Máximos entre 1166Hz y 1301Hz. ................................ 80
Tabla 8. Estadísticos para Máximos entre 1430Hz y 1518Hz. ............................... 81
Tabla 9. Diferencia nivel señal-ruido por distancia. ................................................ 91
9
LISTA DE FIGURAS
Figura 1. Muestra de retraso en la señal [13]. ....................................................... 19
Figura 2. Propagación onda acústica en el mar [21]. ............................................. 24
Figura 3. Tipos de señales. .................................................................................... 25
Figura 4. Distribuciones de probabilidad con media = 0 y varianza = 1, pero diferente
curtosis. (Gráfica realizada en Gnuplot). ........................................................ 29
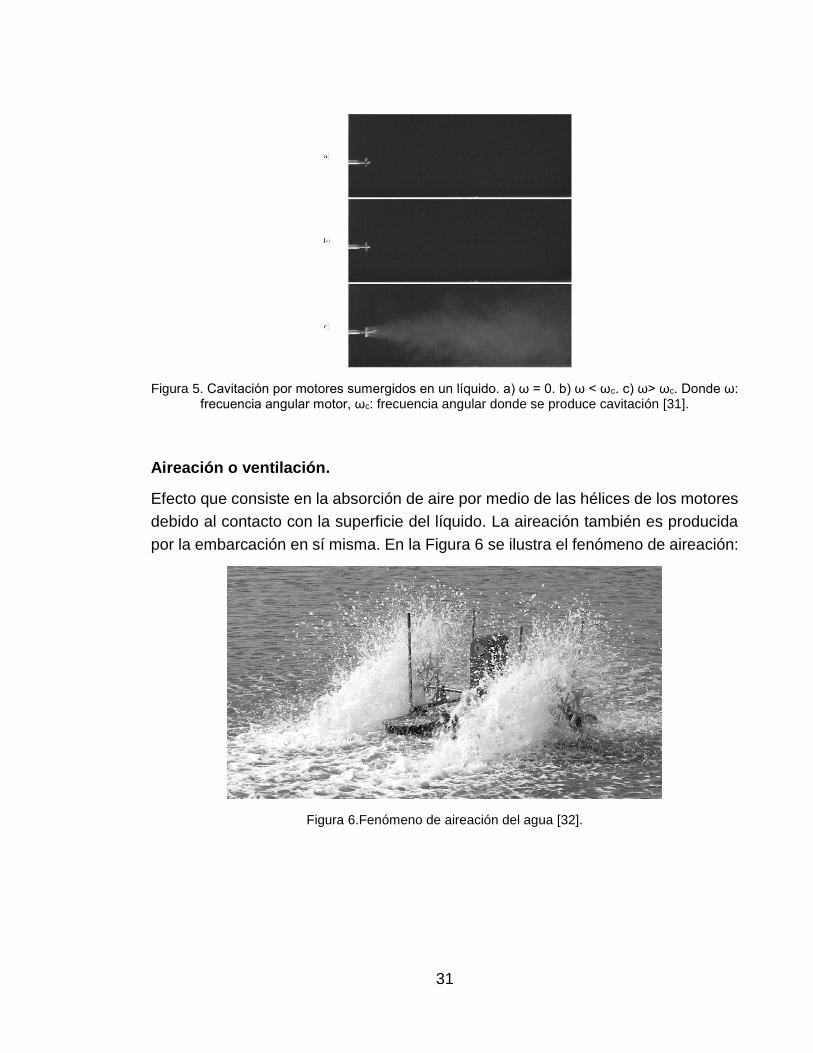
Figura 5. Cavitación por motores sumergidos en un líquido. a) ω = 0. b) ω < ωc. c)
ω> ωc. Donde ω: frecuencia angular motor, ωc: frecuencia angular donde se
produce cavitación [31]. .................................................................................. 31
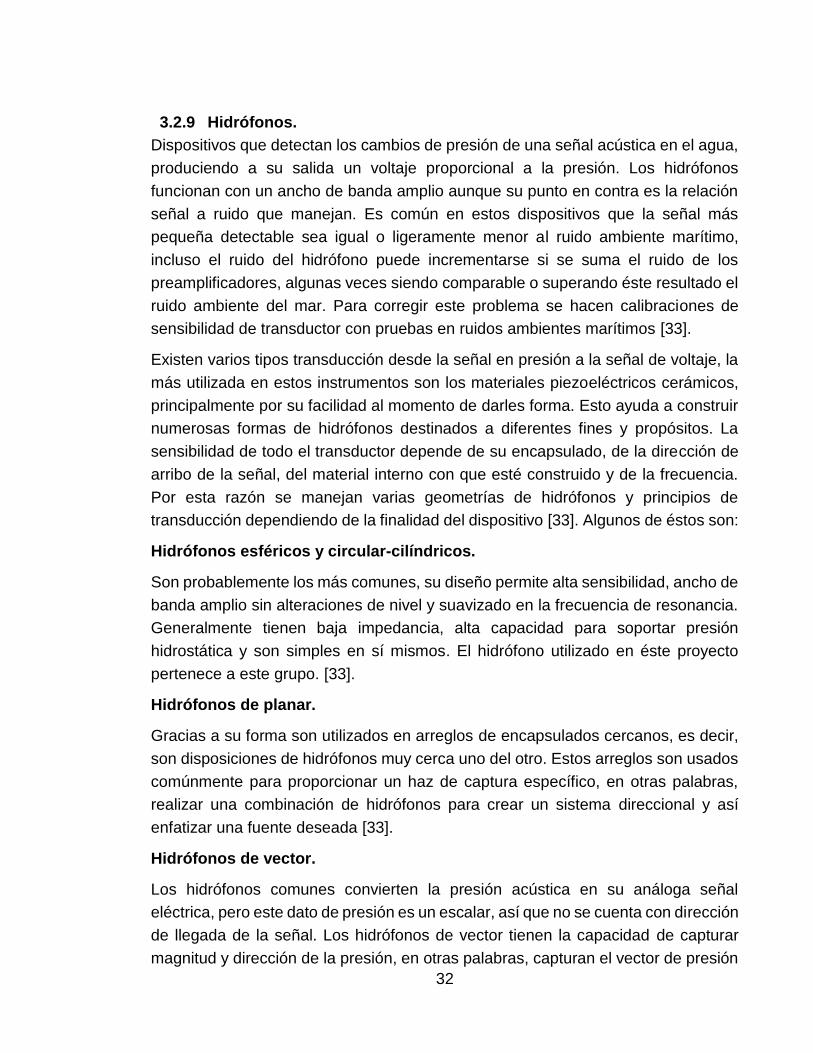
Figura 6.Fenómeno de aireación del agua [32]. .................................................... 31
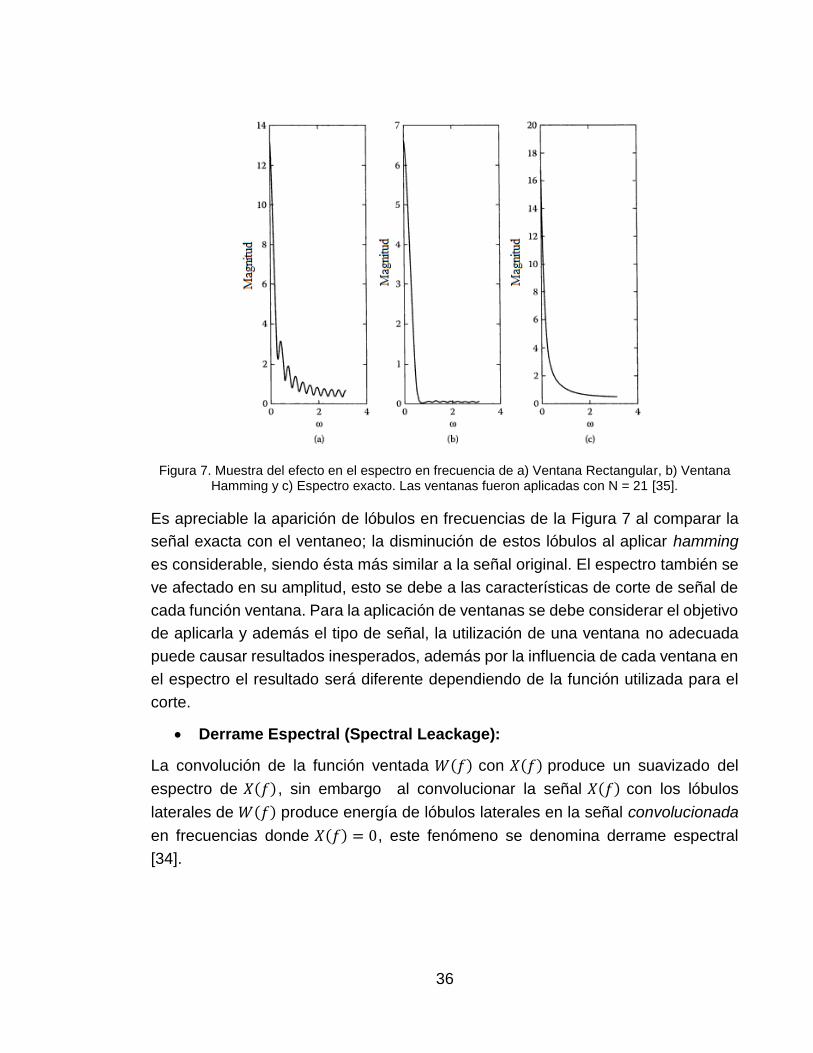
Figura 7. Muestra del efecto en el espectro en frecuencia de a) Ventana
Rectangular, b) Ventana Hamming y c) Espectro exacto. Las ventanas fueron
aplicadas con N = 21 [35]. .............................................................................. 36
Figura 8. Estimación de la Densidad Espectral mediante el método de Welch o
WOSA [35]. ..................................................................................................... 44
Figura 9.Estimación de la Densidad Espectral mediante el método de Welch
Modificado [35]. .............................................................................................. 44
Figura 10. Clasificación de los métodos del análisis espectral. ............................. 45
Figura 11. Nivel de pre-amplificación para la señal capturada por el hidrófono. .... 50
Figura 12. Arreglo para anclaje del hidrófono. Con los círculos rojos se indican las
mancuernas. ................................................................................................... 51
Figura 13. Distancias para la toma de datos. El punto rojo simboliza el hidrófono y
la flecha la dirección de paso de la lancha. .................................................... 51
Figura 14. Diagrama de flujo de la descripción del procedimiento. ........................ 53
Figura 15. Medición de temperatura en la piscina. ................................................ 54
Figura 16.Diagrama de flujo del algoritmo de detección clasificación y localización
de fuentes. ...................................................................................................... 56
Figura 17. Flujo de conexión para el funcionamiento del algoritmo. ...................... 57
Figura 18. a) FFT para un Recorrido Completo. b) Análisis espectral en diferentes
instantes de tiempo mediante el uso de la FFT. ............................................. 62
10
Figura 19. Análisis espectral de diferentes instantes de tiempo mediante el uso de
la PSD............................................................................................................. 63
Figura 20. Análisis espectral de los motores de la lancha amarilla. ....................... 64
Figura 21. Análisis espectral de los motores de la lancha amarilla. ....................... 65
Figura 22. Comparación de la Lancha Amarilla Anclada y en Recorrido. .............. 66
Figura 23. Comparación de la Lancha Verde Anclada y en Recorrido. ................. 67
Figura 24. Comportamiento de la densidad de burbuja con respecto a la velocidad
[12]. ................................................................................................................. 68
Figura 25. Efectos de la aireación sobre las frecuencias características de la fuente.
........................................................................................................................ 68
Figura 26. Comparación de ruido ambiente a diferentes profundidades. ............... 69
Figura 27. Comparación del ruido ambiente a 80cm de profundidad con el filtro
encendido y apagado. .................................................................................... 70
Figura 28. Comparación ruido de fondo a 80cm con el filtro encendido y paso de
lanchas. .......................................................................................................... 71
Figura 29. Comparación ruido de fondo a 80cm con el filtro apagado y paso de
lanchas. .......................................................................................................... 72
Figura 30. 24 Recorridos de la Lancha Verde a 1m de distancia del Hidrófono. ... 73
Figura 31. Espectro mediante media aritmética. .................................................... 74
Figura 32. Ajuste del espectro mediante Spline. .................................................... 75
Figura 33. Comparación de Ajuste Spline Vs Promedio. ....................................... 76
Figura 34. Histograma de Máximos ubicados en el Rango de 451Hz a 539Hz. .... 77
Figura 35. Histograma de Máximos ubicados en el Rango de 726Hz a 796Hz. .... 78
Figura 36. Histograma de Máximos ubicados en el Rango de 955Hz a 1043Hz. .. 79
Figura 37. Histograma de Máximos ubicados en el Rango de 1166Hz a 1301Hz. 80
Figura 38. Histograma de Máximos ubicados en el Rango de 1430Hz a 1518Hz. 81
Figura 39. Regla empírica de la distribución Normal. ............................................ 83
Figura 40. Banco de Filtros para la extracción de máximos de la firma acústica. .. 84
Figura 41. Máximos de Nivel para ambas embarcaciones. ................................... 84
11
Figura 42. Relación entre máximos para cada lancha. .......................................... 85
Figura 43. Desplazamiento en frecuencias debido al cambio de velocidad. .......... 86
Figura 44 Comparación espectro lancha Verde sin peso y con peso añadido. ..... 87
Figura 45. Comparación recorrido a 2m lancha Verde con ruido de fondo sin filtro.
........................................................................................................................ 90
Figura 46. Pérdida por transmisión en una frecuencia. .......................................... 91
Figura 47. Correlación entre dos señales de lancha Verde. .................................. 93
Figura 48. Correlación entre dos señales de lancha Amarilla. ............................... 93
Figura 49. Correlación entre una señal de lancha Verde y Amarilla ...................... 94
Figura 50. Correlación cruzada entre señal original, adelantada y atrasada. ........ 95
Figura 51. Arreglo Virtual de Hidrófonos para determinar la localización de la señal
separados una distancia Δd y desplazadas en tiempo Δt. a) Embarcación
pasando adelante del arreglo. b) Embarcación pasando por detrás del arreglo.
........................................................................................................................ 97
12
1. Introducción.
El desarrollo tecnológico en el campo de la computación y el extenso estudio en el
área de la acústica han impulsado la creación de algoritmos que manipulen
variables de dicha índole con el objetivo de resolver problemas o necesidades. Parte
de estos menesteres está en la detección, clasificación y localización de fuentes por
medio del fenómeno acústico. Los algoritmos destinados a dichos fines cumplen
tareas básicas como la determinación de qué tipo de fuente es la emisora del sonido
percibido además de indicar en qué dirección llega la onda sonora. Con esta
información se pueden realizar acciones de interés sobre la fuente detectada.
Dicho tipo de códigos han sido implementados, por ejemplo, con motivos de
seguridad para identificación de disparos en lugares que autoridades competentes
desean resguardar. El algoritmo indica si el sonido emitido es o no un disparo y
señala la dirección de procedencia, así las autoridades competentes del control del
lugar pueden tomar medidas al respecto. Otro ejemplo en aplicación para este tipo
de codificación es el seguimiento de fauna marina. Instituciones dedicadas al
estudio de animales marinos implementan algoritmos de clasificación para estimar
si cerca de su zona de control ha pasado cierto tipo de especie y en qué dirección,
esto les permite llevar registros sobre los animales que rodean el ecosistema bajo
estudio.
En Colombia se cuenta con sistemas de detección de embarcaciones basadas en
radares. Estas técnicas han funcionado eficientemente para embarcaciones de gran
tamaño pero son deficientes y poco fiables cuando la embarcación es pequeña, por
ejemplo las lanchas rápidas tipo go-fast. Además en el país no se cuenta con
suficiente información acústica de vehículos acuáticos para la implementación de
tecnologías en detección y clasificación, tecnologías que son aplicables al caso
colombiano, ya que se han puesto en funcionamiento en otros países con el objetivo
de detección de embarcaciones y otros fines como el seguimiento de cachalotes y
fauna marina en general, dando estas implementaciones resultados favorables. Por
estas razones se espera que en el caso colombiano la implementación de dichos
códigos tenga resultados positivos, consiguiendo firmas acústicas variadas se
puede dar implementación a tecnologías computacionales y acústicas para el
objetivo de clasificación y localización.
13
El algoritmo a desarrollar en este proyecto propone detectar, clasificar y localizar el
ruido emitido por embarcaciones y compararlas con una base de datos de firmas
acústicas previamente grabadas con intención de afirmar con seguridad, si el tipo
de embarcación registrada es o no el vehículo objetivo. El código tiene como
objetivo embarcaciones que se desplazan en la superficie del agua, es decir, no
está pensado para vehículos tipo submarinos que funcionan completamente
sumergidos. El desarrollo del código está basado en el método de Welch, el cual da
una estimación de densidad espectral de potencia utilizando la transformada de
Fourier, además usa la teoría de sonar pasivo para la determinación de umbrales
de detección y estimación de la distancia de arribo. El algoritmo tiene la capacidad
de adaptarse a la firma acústica de cualquier vehículo previamente grabado y así
funcionar como detector de dicha embarcación, sólo es necesaria la modificación
de parámetros acústicos en los códigos de detección. (En la sección de Anexos A1,
A2, A3, A4 y A5 se encuentra el código implementado).
Sobre el proyecto se pueden mencionar las siguientes ventajas esperadas:
capacidad de detectar embarcaciones de pequeña envergadura; tiempos de
respuesta rápidos; bajo porcentaje de falsas alarmas y fácil manipulación de las
variables de entrada por parte del personal respectivo. Como desventajas
esperadas se pueden describir a continuación: dependencia de características
computacionales del sistema que leerá el código y modificación de parámetros
internos. Considerando entonces la situación actual del país en cuanto a tecnologías
acústicas para rastreo de fuentes, se plantea como una solución el código de
detección expuesto en el presente documento. A futuro se espera la implementación
del código en aguas colombianas siendo útil a instituciones que requieran control
de embarcaciones en zonas marítimas específicas.
Este trabajo se encuentra dividido en secciones, primero se definen los objetivos
del proyecto, tanto general como específicos, a continuación se hace énfasis en los
contenidos teóricos que dieron pie al desarrollo del proyecto, en este se encuentra
tanto teoría de acústica como de procesamiento digital de la señal, posteriormente
se explica la metodología que se utilizó para la obtención de los datos y se muestra
la estructura de los códigos implementados para la extracción de las firmas
acústicas. Luego se procede a hacer el análisis de la información, donde se discuten
los resultados obtenidos de los diferentes experimentos que se llevaron a cabo,
finalmente se encuentran las conclusiones y recomendaciones para quienes en un
futuro vallan a aportar al proyecto.
14
2. Objetivos del proyecto.
2.1 Objetivo general.
Desarrollar un algoritmo para la detección, clasificación y localización de cualquier
tipo de embarcación utilizando un hidrófono.
2.2 Objetivos específicos.
Obtener firmas acústicas de lanchas de prueba en condiciones controladas.
Diseñar un algoritmo de detección de fuentes con funcionamiento en tiempo
real.
Determinar un umbral de detección basado en la firma acústica de la
embarcación y las condiciones del medio.
Realizar las pruebas respectivas para la validación del algoritmo.
Diseñar un algoritmo de localización para un arreglo virtual de dos hidrófonos.
15
3. Marco referencial.
3.1 Estado del arte.
Nehorai y et al. (1994), presentaron un método para la localización de fuentes
acústicas usando arreglos vectoriales de sensores. Se entiende por arreglo vectorial
aquel que posee un medidor de presión acústica y un medidor de velocidad de
partícula, lo cual hace que se disponga de más información acústica y obtener
mayor precisión en la localización. Además utilizan la cota de Cramér-Rao (CRB)
para evaluar el rendimiento óptimo de los estimadores insesgados sobre los errores
de estimación de la dirección de la fuente. Luego optimizan las cotas aplicando el
error angular cuadrático medio (MSAE) y posteriormente mediante algoritmos de
localización de un arreglo de vector estiman la dirección de la fuente. Dos algoritmos
DOA son propuestos, el primero basado en intensidad utilizando presión y velocidad
de partícula, para hallar el vector unitario u en dirección opuesta a la del vector
intensidad. El segundo basado solo en la velocidad de partícula utilizando la
covarianza como estadístico para hallar el vector unitario en dirección a la fuente
acústica. La ventaja principal de estos estimadores CRB y MSAE es que
proporcionan instantáneamente la dirección de la fuente utilizando un sensor
pequeño comparado con la longitud de onda. Además es posible, con un solo
arreglo de vector, hallar la dirección de dos fuentes a la vez [1].
K. T.Wong et al. (1997), posteriormente exponen un método para la estimación de
los ángulos de azimut y de elevación mediante un esquema basado en el algoritmo
ESPRIT, usando un arreglo rectangular de hidrófonos espaciados mucho más de
media longitud de onda, un hidrófono de vector comprende de dos o tres sensores
de velocidad de partícula que se sitúan juntos y ortogonales entre sí, con el fin de
captar cada una de las componentes cartesianas del vector de velocidad de
partícula, adicionalmente acompañados de un sensor de presión [2].
Xerri et al. (2002), presentan un método acústico de localización y rastreo de objetos
en movimiento en el mar ya sea para seguir buques en la superficie (2D) o para
objetos bajo el agua (3D), mediante la ubicación de hidrófonos en una posición fija
sumergidos bajo el agua. El método se basa en los retardos existentes en la
propagación entre la fuente y receptor para cada uno de los receptores, y de la
función de ambigüedad que es ideal para identificar la localización cuando la fuente
está en movimiento. Existen factores determinísticos en el método, como la relación
señal a ruido (SNR), la compensación del efecto Doppler, y el método de
blanqueamiento (whitening), la uniformidad de la densidad espectral de potencia, y
el tiempo de integración son necesarios para la precisión de la localización de la
16
fuente. El algoritmo presentado puede ser usado en tiempo real. Los resultados
fueron los esperados, sin embargo fue necesario obtener más precisión y utilizar
compensaciones de Doppler de segundo orden sobre todo durante los giros para
no perder el rastro de la fuente. El cálculo de la trayectoria requiere de la función de
ambigüedad para cada par de receptores y de una etapa de pre-procesamiento para
suprimir los ecos, los cuales dependen de la profundidad del área [3].
Zha y Qiu (2006), propusieron un nuevo método FOC-ESPRIT de detección en 2-
D basado en correlación de orden fraccional y de localización de fuentes usando
arreglos de hidrófonos de vector conformados por dos o tres sensores de velocidad
de partícula ubicados ortogonalmente entre sí, más un sensor de presión, con el fin
de extraer información del ángulo azimut y de elevación de las ondas acústicas
submarinas. Las simulaciones demostraron que este método es mucho más
eficiente en un amplio rango de características que los algoritmos de detección
basados en ESPRIT, además analizan el rendimiento del método mediante el error
cuadrático medio (MSE) y la cota de Cramér-Rao [4].
Giraudet y Glotin (2006), describieron un método para el rastreo de ballenas con un
arreglo de cinco hidrófonos espaciados, basados en un algoritmo de TDOA
(Diferencias de tiempos de llegada) la señal acústica es captada por cada uno de
los hidrófonos y procesada para cancelar los ecos que pueden presentar TDOAs
adicionales, debido a la reflexiones con la superficie, con el fondo, e inclusive con
diferentes capas de agua, los cuales no pueden ser tenidos en cuenta para la
localización de las ballenas, para ello se presenta un algoritmo sencillo pero
eficiente para cancelar los ecos presentes. El algoritmo de localización presentado
en este paper se ejecuta dos veces más rápido que un algoritmo en tiempo real,
pero da resultados similares [5].
B.Borowski et al. (2008), presentaron un método de detección de fuentes acústicas
bajo el agua aplicando la teoría de sonar pasivo, y describieron la forma en que se
hallaron las diferentes variables, como lo son la perdida por transmisión, la densidad
espectral de potencia de la fuente y el ruido ambiente. Concluyeron que las
dificultades al usar un sistema de detección pasivo en una ciudad, se debe al alto
nivel de ruido ambiente y a la complejidad de la propagación del sonido en aguas
poco profundas.
La pérdida por transmisión, fue medida comparando los niveles de ruido del paso
de las embarcaciones en diferentes puntos a lo largo de sus rutas y la distancia
entre la fuente y el hidrófono se calculó con la ayuda de cámaras y de software.
Posteriormente utilizando un solo hidrófono omnidireccional y variando ciertas
17
condiciones, se miró cómo se afectaba la localización de la fuente y finalmente se
notó la mejora de los resultados obtenidos con un arreglo de hidrófonos que con un
solo hidrófono omnidireccional [6].
Poco después He y Liu (2009), expusieron un nuevo algoritmo de detección de
señales acústicas usando un arreglo lineal de hidrófonos de vector, utilizando un
método llamado “propagador” para encontrar los ángulos de dirección de la señal
tanto en azimut como en elevación, provenientes de la información suministrada por
las componentes de la velocidad de partícula. Se presenta el algoritmo como una
mejora del algoritmo SUMWE, que tiene la particularidad de no necesitar las
diferencias de tiempo de llegada entre los sensores adyacentes, lo cual permite un
espaciado más grande entre los sensores, inclusive mucho más de media longitud
de onda de separación sin generar ambigüedades y errores en la estimación de los
ángulos [7].
Luego estos mismos autores (2009) propusieron en otra publicación un algoritmo
que emplea la invariancia espacial entre los dos hidrófonos vector, pero no requiere
información a priori de los factores espaciales. Utiliza ruido aditivo no-gaussiano,
que se encuentra a menudo en aplicaciones de acústica submarina. Se aplica el
método ESPRIT para estimar y luego emparejar los cosenos directores del eje x con
los cosenos directores del eje y de forma automática obtener el ángulo de azimut y
de elevación. La metodología propuesta por He y Liu presentó similitudes con los
algoritmos descritos por K. T.wong et al. [2] y por Zha y Qiu [4], en los que se
utilizaron hidrófonos de vector desplazados, utilizó invariancia espacial y usó el
método ESPRIT. Difiere en que no necesita de una geometría rectangular como se
menciona en [2] sino que utiliza dos hidrófonos de vector desplazados
arbitrariamente [8].
En el año 2009, M. R. Arshad habló de la importancia que tienen los sensores
submarinos en la actualidad, todas las aplicaciones que se les ha dado en la
industria y en el área ingenieril, las ventajas y desventajas de los sensores acústicos
y los no acústicos como los ópticos y los electroquímicos, los retos que se presentan
actualmente en el diseño de los sensores. Además se habló de soluciones
potenciales a futuro, como lo son los sensores bio-inspirados y los MEMS (Sistemas
Microelectromecánicos), y qué posibles retos y trabajos se pueden presentar en un
futuro próximo [9].
P. Felisberto et al. (2010) describieron un método de localización de fuentes en
azimut, con un algoritmo basado en intensidad utilizando un solo arreglo de
hidrófono de vector sumergido desde un bote en movimiento a baja velocidad en
18
aguas poco profundas. El método es capaz de rastrear fuentes en movimiento de
alta frecuencia en un rango de hasta 2 km, y también es capaz de rastrear la
orientación del ruido de baja frecuencia de una embarcación. El método demanda
bajo nivel computacional, lo cual lo hace ideal para ser utilizado en estaciones
móviles. Los resultados demostraron que el rendimiento con un simple sensor de
vector es similar a los resultados con arreglos y técnicas de beamforming [10].
Luego en otra publicación P. Felisberto et al. (2010), mostraron un comparativo en
aplicaciones DOA de acústica submarina, entre hidrófonos de presión, sensores de
velocidad de partícula y arreglos de sensores de vector, demostrando que los
arreglos vectoriales son mucho más efectivos y presentan mayor precisión en los
resultados [11].
Posteriormente L.Houégnigan et al. (2010), hicieron un análisis de las técnicas de
monitoreo pasivo que juegan un papel fundamental en la conservación de los
cetáceos e investigan el desarrollo y la eficiencia de dichas técnicas para ser usadas
en un módulo de localización para un sistema de monitoreo acústico pasivo en
tiempo real. Algunos métodos están basados en TDOA (Diferencias de tiempos de
llegada) y otros en diferencias espacio-temporales, se presenta un método híbrido
que representa una mejora en los niveles de ruido, en el tiempo de procesamiento,
y es mucho más robusto, es decir mucho más estable y menos sensible a ecos y
reverberaciones. Se presentan diferencias entre los métodos TDOA y espacio
temporales y se demuestra la eficiencia de los métodos híbridos sobre estos en la
localización de cetáceos y embarcaciones [12].
Tesei et al. (2012), presentaron algoritmos de detección y localización optimizados
para botes de pequeño y mediano tamaño, basados en la información de una
estación submarina de un arreglo de cuatro hidrófonos, o de la unión entre dos
arreglos volumétricos de hidrófonos. Los algoritmos de localización se basan en la
correlación cruzada entre un par de hidrófonos en función del tiempo. La señal
acústica emitida por el motor de los botes, los barcos, las turbinas, los ejes, o de la
estructura del barco en sí interactúa con el medio de propagación, que en este caso
es el agua, y con la superficie generando movimiento. Luego mediante un método
de estimación TDOA se puede identificar la dirección de la fuente.
Los arreglos volumétricos de hidrófonos se encuentran siempre en campo lejano
con respecto a la fuente de ruido, por lo tanto el frente de onda que captan será
plano. Asumiendo esta última condición, el ruido emitido alcanza a los sensores que
están retrasados uno respecto al otro generando así una diferencia de tiempo ∆𝑇
(ver Figura 1) que está en función del ángulo de marcación α el cual indica la
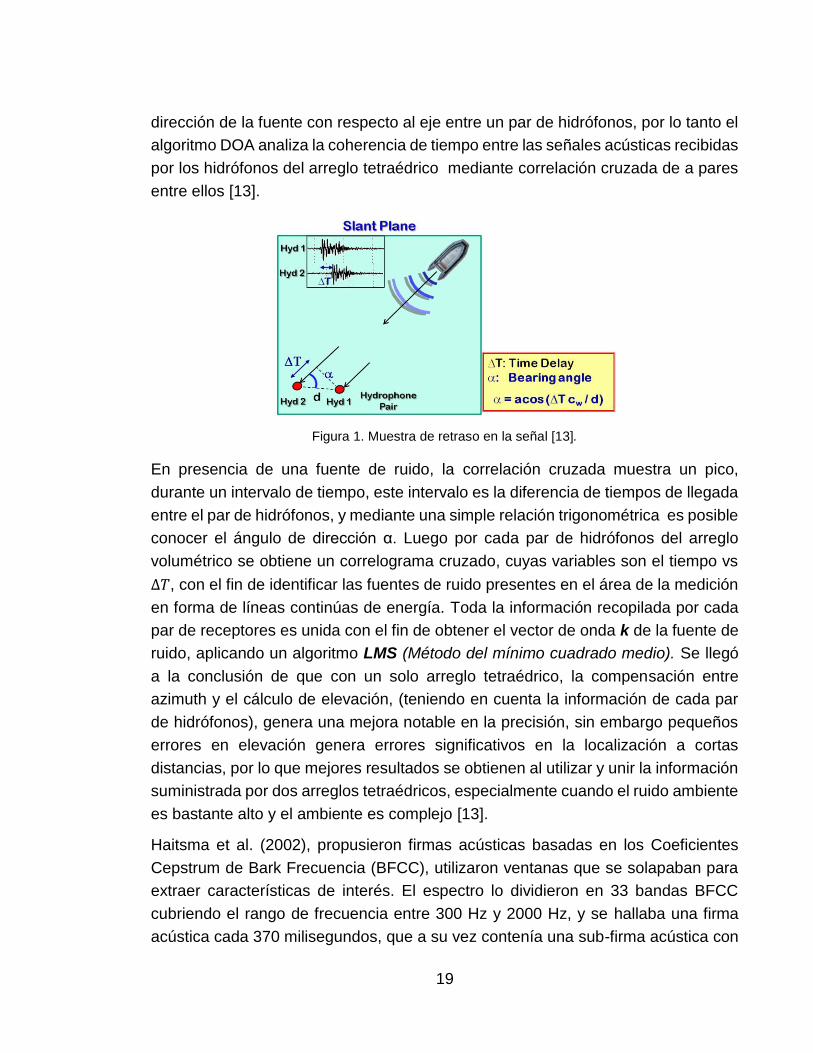
19
dirección de la fuente con respecto al eje entre un par de hidrófonos, por lo tanto el
algoritmo DOA analiza la coherencia de tiempo entre las señales acústicas recibidas
por los hidrófonos del arreglo tetraédrico mediante correlación cruzada de a pares
entre ellos [13].
Figura 1. Muestra de retraso en la señal [13].
En presencia de una fuente de ruido, la correlación cruzada muestra un pico,
durante un intervalo de tiempo, este intervalo es la diferencia de tiempos de llegada
entre el par de hidrófonos, y mediante una simple relación trigonométrica es posible
conocer el ángulo de dirección α. Luego por cada par de hidrófonos del arreglo
volumétrico se obtiene un correlograma cruzado, cuyas variables son el tiempo vs
∆𝑇, con el fin de identificar las fuentes de ruido presentes en el área de la medición
en forma de líneas continúas de energía. Toda la información recopilada por cada
par de receptores es unida con el fin de obtener el vector de onda k de la fuente de
ruido, aplicando un algoritmo LMS (Método del mínimo cuadrado medio). Se llegó
a la conclusión de que con un solo arreglo tetraédrico, la compensación entre
azimuth y el cálculo de elevación, (teniendo en cuenta la información de cada par
de hidrófonos), genera una mejora notable en la precisión, sin embargo pequeños
errores en elevación genera errores significativos en la localización a cortas
distancias, por lo que mejores resultados se obtienen al utilizar y unir la información
suministrada por dos arreglos tetraédricos, especialmente cuando el ruido ambiente
es bastante alto y el ambiente es complejo [13].
Haitsma et al. (2002), propusieron firmas acústicas basadas en los Coeficientes
Cepstrum de Bark Frecuencia (BFCC), utilizaron ventanas que se solapaban para
extraer características de interés. El espectro lo dividieron en 33 bandas BFCC
cubriendo el rango de frecuencia entre 300 Hz y 2000 Hz, y se hallaba una firma
acústica cada 370 milisegundos, que a su vez contenía una sub-firma acústica con
20
paso de 11.7 milisegundos. La sub-firma acústica que hallaban era un vector de 32
posiciones con diferentes coeficientes [14].
Ke et al. (2005), utilizaron parte de la extracción que hicieron Haitsma et al. (2002),
sin embargo le añadieron un enfoque diferente de aprendizaje de características.
No analizaron la firma acústica como un vector de una dimensión, la transformaron
en una imagen 2-D en función de la frecuencia y el tiempo, parecido a un
espectrograma, y posteriormente aplicaban el enfoque de aprendizaje de
características basado en visión computacional llamado AdaBoost, usado para
reconocimiento de rostros [15].
Luego Baluja et al. (2006), introdujeron la extracción de patrones por medio de
wavelets usando la técnica de min-hash, la cual consiste en determinar qué tan
parecidas son dos señales mediante permutaciones independientes relativas al
valor mínimo. En los resultados demostraron que se logró identificar pequeñas
muestras de audio que fueron degradadas de diferentes maneras, entre ellas
adición de ruido a la señal, baja calidad en la grabación y reproducción desde
dispositivos celulares [16].
J.Wang et al. (2010), utilizaron el espectrograma para la extracción de patrones,
aplicando FFT sobre una muestra cada 67 ms hasta cubrir toda la señal de audio.
Luego analizaron los máximos de nivel mediante un gradiente de energía sobre
cada punto del espectograma. Este método fue utilizado en un buscador de
canciones y el algoritmo logró identificar muestras grabadas con micrófonos en
presencia de altos niveles de ruido con buena precisión y eficiencia [17].
A.Ramalingam y S.Krishnan (2006), describieron un método para la extracción de
coeficientes usando la STFT sobre pequeños tramos de la señal de audio,
extrayendo en cada muestra ocho coeficientes, centroide espectral, ancho de banda
espectral, energía de la banda espectral, medida de la planitud espectral, factor de
cresta espectral, entropía de Renyi, entropía de Shannon y los coeficientes
cepstrales en las frecuencias de mel (MFCC). Estos coeficientes se guardaban en
un vector que posteriormente se dirigía a una base de datos [18].
De la misma manera G.Tzanetakis (2002), extrajo de una canción diferentes
coeficientes, con base en esos coeficientes logró clasificar géneros musicales. Los
coeficientes que tuvo en cuenta eran: Textura característica del timbre, caída
espectral, flujo espectral, cruces por cero en el dominio del tiempo, coeficientes
cepstrales en las frecuencias de mel (MFCC), ventanas de análisis y de textura y
característica de baja energía [19].
21
3.2 Marco conceptual.
3.2.1 Propagación acústica en el mar.
Cualquier fuente que genere movimiento en el agua y perturbe el medio se propaga
en forma de onda acústica las cuales hacen que las moléculas de agua presenten
compresión y rarefacción. Esta propagación acústica es conocida como onda
mecánica elástica y se propaga en los 3 ejes coordenados. Estas ondas se irradian
eficientemente en el agua por lo cual se usan para efectos de detección de blancos
a través de sistemas de sonar [20].
Por otro lado cuando el sonido se transmite desde una fuente, su energía se
expande en el tiempo en áreas cada vez mayores análogamente al principio de la
ley del inverso cuadrado para ondas esféricas. Además se produce una absorción
sonora cuando la onda viaja a través del agua y parte de la energía se convierte en
calor producto de la fricción ocasionada por la viscosidad del líquido. Adicionalmente
se produce un efecto de dispersión sobre la energía restante, la cual genera formas
de onda secundarias que viajan en distintas direcciones por efecto del reflejo de los
rayos con las superficies, burbujas, sólidos suspendidos, entre otros. A medida que
el sonido viaja por el medio, la energía asociada a la onda acústica sufre una
disminución, lo que se conoce como pérdida de transmisión sonora causada por
estos tres factores. Dicha pérdida por transmisión es directamente proporcional a la
distancia entre la fuente y el receptor [9] [21] [22].
3.2.2 Factores de atenuación.
Cuando el sonido se transmite desde una fuente, su energía se propaga en áreas
cada vez mayores a medida que transcurre el tiempo, haciendo que la proporción
de energía por unidad de área disminuya al aumentar la distancia, dicha pérdida es
directamente proporcional a la distancia entre la fuente y el receptor [9] [21].
Los factores principales que determinan la atenuación de la onda acústica en el
agua son la reflexión, la absorción y la dispersión:
Reflexión.
La transmisión en el agua puede tomar diferentes caminos debido a los obstáculos
que suelen estar presentes en el medio. Cuando una onda choca contra un objeto
esta se refleja perdiendo generalmente intensidad y modificando la fase, a causa de
los diversos caminos de llegada al receptor, la onda arriba con características
diferentes a la señal original. Las diferentes reflexiones y la pérdida por transmisión,
22
pueden modificar la señal original tanto en nivel total de intensidad sonora así como
por frecuencia. [21].
Absorción.
Una onda acústica necesita de un medio para propagarse. En un medio la
transmisión de energía de una molécula a otra no se hace al 100%, al contrario, por
contacto con el medio y el choque con otras partículas, la energía se va convirtiendo
en calor por el rozamiento entre ellas. La pérdida por fricción y la disipación de calor
está en función de la distancia, es decir, a medida que la onda viaja su intensidad
disminuye exponencialmente. En el agua marítima la absorción es menor que en
agua dulce o en el aire. [21] .
Dispersión.
Debido a que el océano es considerado como un medio de transmisión no
homogéneo en el que se presentan cambios en la temperatura, la salinidad y la
presión, se generan canales. Cuando estos canales son comparables a la longitud
de onda, estos producen reflexiones las cuales genera formas de onda secundarias
que viajan en distintas direcciones. Cuando la longitud de onda es mayor a la
dimensión del obstáculo, la onda es capaz de rodearlo y seguir propagándose.
[21].
Tipos de propagación en el agua.
Análogamente a los tipos de propagación sonora en el aire, en el agua también se
cuenta varios tipos de propagación acústica. Para fuentes puntuales la energía
decaerá proporcionalmente al cuadrado de la distancia de acuerdo con el modelo
de propagación esférica; diferentes condiciones geométricas causadas por las olas
provocan una tasa de decaimiento diferente [22]. Éste tipo de propagación se
presenta cuando la fuente se encuentra sumergida en el agua a una profundidad
considerable, esta condición significa que la superficie del agua y el fondo están lo
suficientemente lejos para no modificar la propagación en todas las direcciones,
lográndose de esta manera una propagación esférica. Otro modelo de propagación
son las ondas planas caracterizadas por no tener pérdidas de energía – o ser muy
poca la pérdida - a medida que la onda se transmite por el medio. La creación de
ondas planas requiere que las variaciones de presión se encuentren distribuidas a
lo largo de una línea recta, pueden darse en lugares donde se produzca ruido y esté
encerrado en una cavidad de forma esférica. La propagación cilíndrica tiene
características de ambas propagaciones (esférica y plana). Este tipo de
propagación se puede hallar en piscinas, donde la profundidad y la superficie se
23
encuentran a una distancia relativamente cercana entre sí, comportándose estas
zonas como superficies reflectantes en las cuales el sonido no viaja más allá,
provocando así la forma de un cilindro en la propagación de la onda sonora [23]. Un
factor añadido al medio acuático es el oleaje y el movimiento del líquido, esto influye
en la propagación obligándola a crear diferentes caminos de transmisión, aspecto
que se ve reflejado en la proporción del decaimiento de energía de la onda sonora.
[22] [23].
3.2.3 Velocidad del Sonido.
La velocidad del sonido en el agua oscila entre 1450 m/s y 1540 m/s. Aunque la
variación de la velocidad del sonido en el agua es relativamente pequeña (≤ +/- 3%),
la propagación del sonido puede ser considerablemente afectada. Éste valor de
velocidad puede ser medido directamente o calculado si se conoce la temperatura
(T), la salinidad (S), la presión del agua (P) y la profundidad (z) [22] [24].
La Ecuación 2 (de Chen Millero) se utiliza para el cálculo de la velocidad de sonido
usada en la mayoría de aplicaciones [22] [24] :
𝑐 = 1449,2 + 4,6 ∗ 𝑇 − 0,055 ∗ 𝑇2 + 0,00029 ∗ 𝑇3 + (1,34 − 0,01 ∗ 𝑇)(𝑆 − 35)
+ 0,016 ∗ 𝑧 (2)
donde:
C = velocidad sonido [m/s] T = temperatura [°C] 0 ≤ T ≤ 35. S = salinidad [pps] 0 ≤ S ≤ 45. Z = profundidad [m] 0 ≤ Z ≤ 1000.
3.2.4 Propagación de una onda acústica en el agua en función de la
profundidad.
La razón con la cual la onda se desplaza cierta distancia en un determinado tiempo,
se le denomina velocidad de propagación de onda, en el caso de la onda acústica,
dicha velocidad se encuentra en función de la densidad y la presión en el medio de
propagación. En el agua, especialmente en el océano, la presión incrementa a
medida que aumenta la profundidad. Por otro lado, la densidad del agua está en
función del grado de salinidad y de la temperatura, lo cual hace que la velocidad de
onda en el agua presente variaciones a medida que se propaga en este medio.
Análogamente a la teoría de rayos de la luz, la dirección de propagación del sonido
puede ser representada mediante líneas “rectas”, las cuales representan el frente
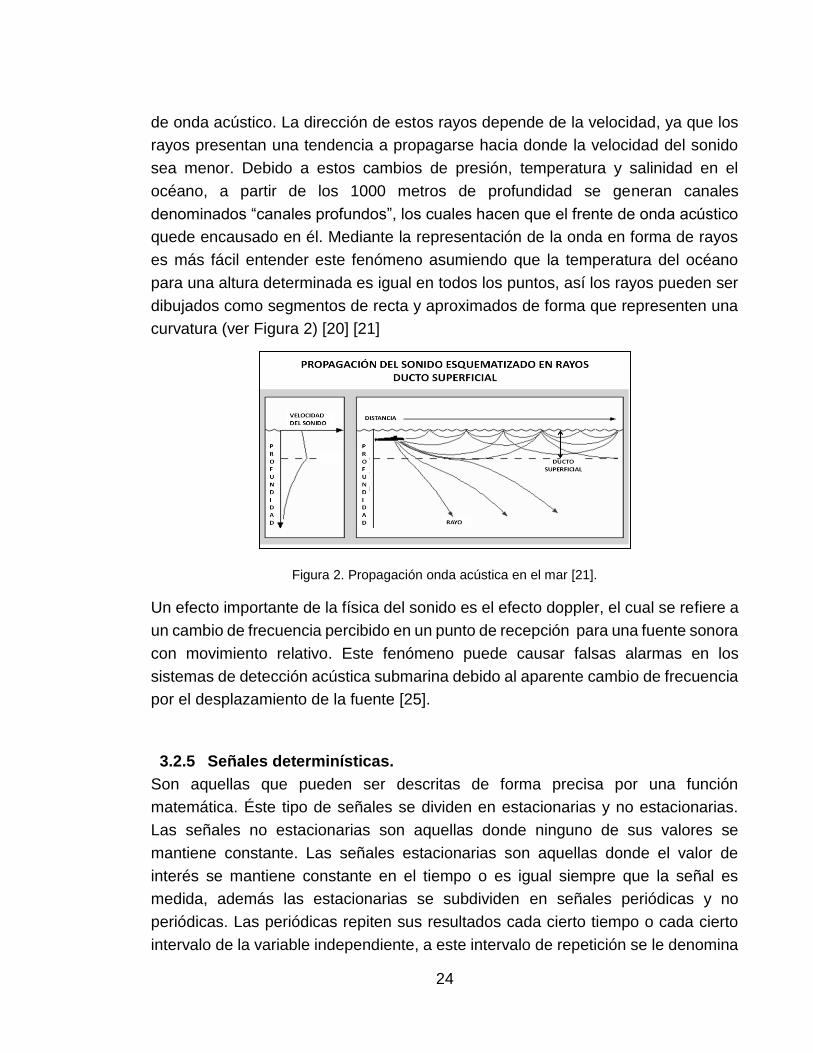
24
de onda acústico. La dirección de estos rayos depende de la velocidad, ya que los
rayos presentan una tendencia a propagarse hacia donde la velocidad del sonido
sea menor. Debido a estos cambios de presión, temperatura y salinidad en el
océano, a partir de los 1000 metros de profundidad se generan canales
denominados “canales profundos”, los cuales hacen que el frente de onda acústico
quede encausado en él. Mediante la representación de la onda en forma de rayos
es más fácil entender este fenómeno asumiendo que la temperatura del océano
para una altura determinada es igual en todos los puntos, así los rayos pueden ser
dibujados como segmentos de recta y aproximados de forma que representen una
curvatura (ver Figura 2) [20] [21]
Figura 2. Propagación onda acústica en el mar [21].
Un efecto importante de la física del sonido es el efecto doppler, el cual se refiere a
un cambio de frecuencia percibido en un punto de recepción para una fuente sonora
con movimiento relativo. Este fenómeno puede causar falsas alarmas en los
sistemas de detección acústica submarina debido al aparente cambio de frecuencia
por el desplazamiento de la fuente [25].
3.2.5 Señales determinísticas.
Son aquellas que pueden ser descritas de forma precisa por una función
matemática. Éste tipo de señales se dividen en estacionarias y no estacionarias.
Las señales no estacionarias son aquellas donde ninguno de sus valores se
mantiene constante. Las señales estacionarias son aquellas donde el valor de
interés se mantiene constante en el tiempo o es igual siempre que la señal es
medida, además las estacionarias se subdividen en señales periódicas y no
periódicas. Las periódicas repiten sus resultados cada cierto tiempo o cada cierto
intervalo de la variable independiente, a este intervalo de repetición se le denomina
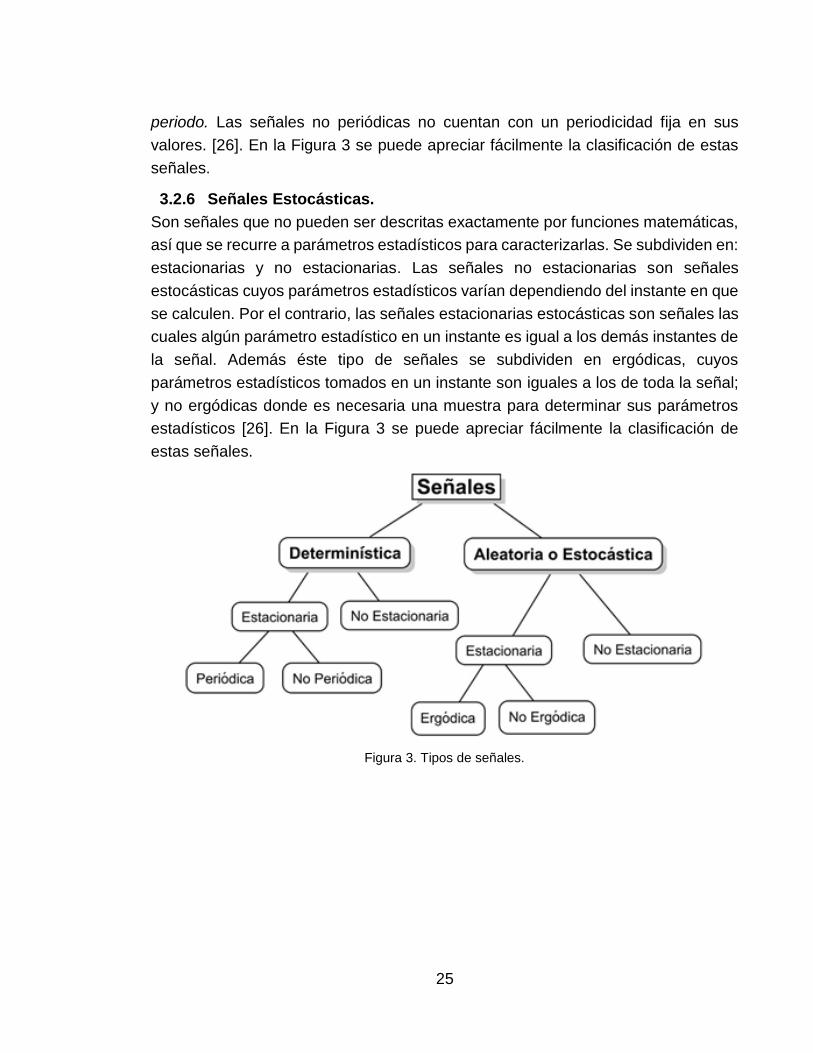
25
periodo. Las señales no periódicas no cuentan con un periodicidad fija en sus
valores. [26]. En la Figura 3 se puede apreciar fácilmente la clasificación de estas
señales.
3.2.6 Señales Estocásticas.
Son señales que no pueden ser descritas exactamente por funciones matemáticas,
así que se recurre a parámetros estadísticos para caracterizarlas. Se subdividen en:
estacionarias y no estacionarias. Las señales no estacionarias son señales
estocásticas cuyos parámetros estadísticos varían dependiendo del instante en que
se calculen. Por el contrario, las señales estacionarias estocásticas son señales las
cuales algún parámetro estadístico en un instante es igual a los demás instantes de
la señal. Además éste tipo de señales se subdividen en ergódicas, cuyos
parámetros estadísticos tomados en un instante son iguales a los de toda la señal;
y no ergódicas donde es necesaria una muestra para determinar sus parámetros
estadísticos [26]. En la Figura 3 se puede apreciar fácilmente la clasificación de
estas señales.
Figura 3. Tipos de señales.
26
3.2.7 Parámetros estadísticos.
Promedio.
Es una operación matemática que da como resultado una medida de tendencia
central [27] :
�� =1
𝑁∑𝑥𝑖
𝑁
𝑖=1
(3)
donde:
��: promedio de los datos.
𝑥𝑖: representa cada dato.
𝑁: cantidad total de datos.
Mediana.
Es el valor central de un conjunto de datos ordenados. La mediana debe ser hallada
después de organizar los datos en forma ascendente o descendente [27].
Si el número de datos es impar la mediana se encuentra en la posición (n+1)/2 de
los valores:
𝑀𝑒 = 𝑥(𝑛+1)/2 (4)
Si el número de datos es par la mediana es el promedio entre la posición n/2 y
(n/2)+1:
𝑀𝑒 =(𝑥𝑛
2+ 𝑥
(𝑛2+1))
2 (5)
Moda.
Es el dato que más se repite en el conjunto de datos analizado. Si existen dos datos
con igual número de apariciones absolutas se llama distribución bimodal; si hay tres
datos con igual número de apariciones absolutas se denomina distribución trimodal;
si todos los datos aparecen con la misma frecuencia entonces no hay moda [27].
27
Varianza.
Es una medida de dispersión que indica qué tan alejados están los valores del
conjunto de datos de su promedio. Se debe tener en cuenta que éste parámetro es
fácilmente influenciado por valores atípicos [27]. Se halla con la Ecuación 6:
𝑠2 =1
𝑁∑(𝑥𝑖 − ��)
2
𝑁
𝑖=1
(6)
Desviación estándar.
Es la raíz cuadrada de la varianza [27].
𝜎 = √𝑠2 = √1
𝑁∑(𝑥𝑖 − ��)2𝑁
𝑖=1
(7)
Cuartiles.
Son tres valores C1, C2 y C3 que dividen el conjunto de datos en cuatro grupos
iguales, cada uno representando el 25% de los valores. C2 siempre coincide con la
mediana [28].
Esperanza.
Indica el valor que se espera cuando un suceso aleatorio no cambia de probabilidad
en sus resultados. Si todos los valores de un evento tienen la misma probabilidad la
esperanza es igual al promedio [28]:
𝐸[𝑋] = ∑𝑥𝑖 ∗ 𝑝(𝑥𝑖)
𝑁
𝑖=1
(8)
donde:
𝐸[𝑋]: indica la esperanza de todo el conjunto de datos.
𝑝(𝑥𝑖): es la probabilidad de suceso del valor 𝑥𝑖.
28
Momento central.
Es una operación matemática que utiliza el operador Esperanza para hallar valores
de parámetros usados en otros conceptos [28]:
𝜇𝑘 = 𝐸[(𝑋 − 𝐸[𝑋])𝑘] (9)
Si 𝑘 = 1, 𝜇1 = 0; si 𝑘 = 2, 𝜇2 = 𝜎2; si 𝑘 = 3, 𝜇3 se utiliza para hallar la Asimetría; si
𝑘 = 4, 𝜇4 se utiliza para hallar la Curtosis.
Asimetría.
Es un indicador que permite determinar la simetría del conjunto de datos teniendo
como valor de referencia la media [28]:
𝛾 = 𝜇3𝜎3 (10)
donde:
𝛾: indica la asimetría del conjunto de datos.
𝜇3: tercer momento central.
𝜎: desviación estándar.
Si 𝛾 > 0, la distribución es asimétrica positiva; si 𝛾 < 0 la distribución es asimétrica
negativa; si 𝛾 = 0 la distribución es simétrica.
Curtosis.
Es una medida de la forma de la distribución de un conjunto de datos. Si el valor de
curtosis es alto indica que mayor densidad de datos cercanos a la media mientras
existe también varios datos alejados de esta [28]:
𝛽2 = 𝜇4𝜎4 (11)
donde:
𝛽2: indica la curtosis del conjunto de datos.
𝜇4: tercer momento central.
𝜎: desviación estándar.
29
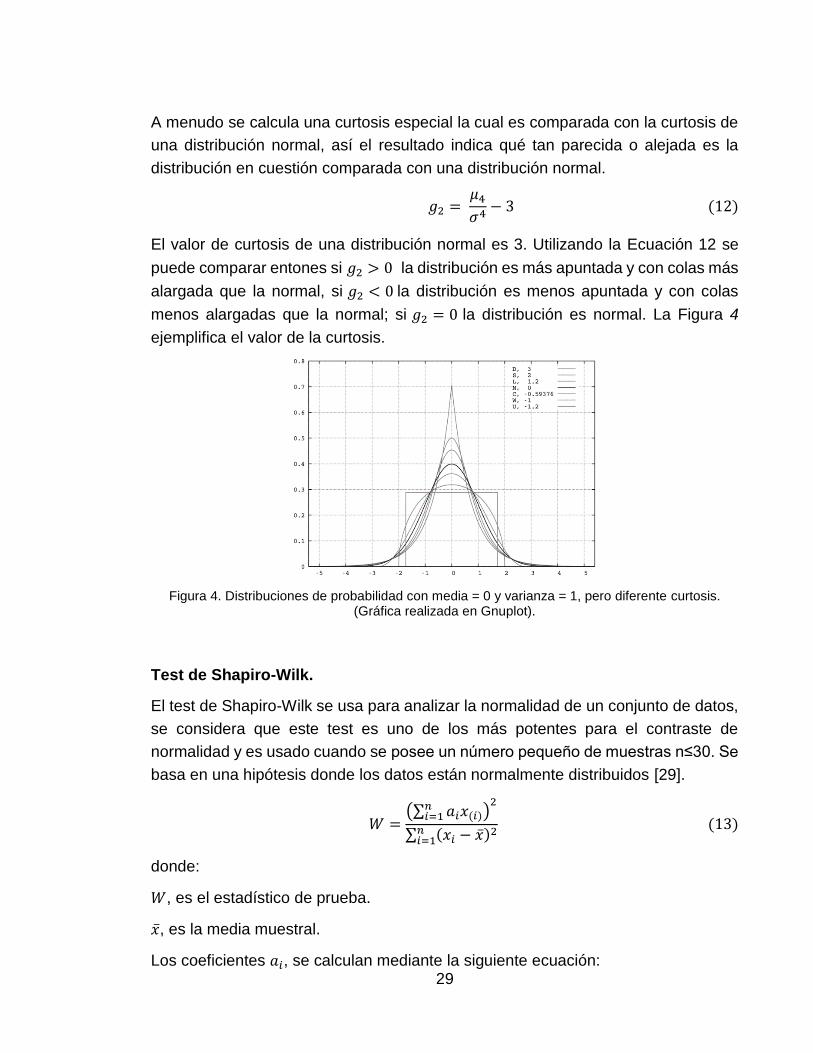
A menudo se calcula una curtosis especial la cual es comparada con la curtosis de
una distribución normal, así el resultado indica qué tan parecida o alejada es la
distribución en cuestión comparada con una distribución normal.
𝑔2 = 𝜇4𝜎4− 3 (12)
El valor de curtosis de una distribución normal es 3. Utilizando la Ecuación 12 se
puede comparar entones si 𝑔2 > 0 la distribución es más apuntada y con colas más
alargada que la normal, si 𝑔2 < 0 la distribución es menos apuntada y con colas
menos alargadas que la normal; si 𝑔2 = 0 la distribución es normal. La Figura 4
ejemplifica el valor de la curtosis.
Figura 4. Distribuciones de probabilidad con media = 0 y varianza = 1, pero diferente curtosis. (Gráfica realizada en Gnuplot).
Test de Shapiro-Wilk.
El test de Shapiro-Wilk se usa para analizar la normalidad de un conjunto de datos,
se considera que este test es uno de los más potentes para el contraste de
normalidad y es usado cuando se posee un número pequeño de muestras n≤30. Se
basa en una hipótesis donde los datos están normalmente distribuidos [29].
𝑊 =(∑ 𝑎𝑖𝑥(𝑖)
𝑛𝑖=1 )
2
∑ (𝑥𝑖 − ��)2𝑛𝑖=1
(13)
donde:
𝑊, es el estadístico de prueba.
��, es la media muestral.
Los coeficientes 𝑎𝑖, se calculan mediante la siguiente ecuación:
30
𝑎𝑖 =𝑚𝑇𝑉−1
(𝑚𝑇𝑉−1𝑉−1𝑚)2 (14)
donde:
𝑚, son los valores medios del estadístico ordenado.
𝑉, es la matriz de covarianzas del estadístico.
Si el valor-p, que es la probabilidad de rechazar la hipótesis siendo cierta, es menor
al nivel de confianza (típicamente 5%), la hipótesis se rechaza lo que indica que los
datos no provienen de una distribución normal, pero si el p-valor es mayor a 0.05,
la hipótesis se acepta indicando que los datos provienen de una distribución normal
[29].
Spline.
Son un conjunto de curvas polinomiales utilizadas para la interpolación y el ajuste
de curvas. Se han convertido en uno de los métodos más utilizados dada su
simplicidad de cálculo y programación en comparación con otros métodos, además
son un sistema poco sensible a valores inesperados o anormales. Los métodos
spline sirven para aproximaciones de curvas, superficies o volúmenes, es decir,
pueden extenderse para trabajar en más de una dimensión [30].
3.2.8 Fenómenos de Generación de Burbujas
Cavitación.
Es la creación de burbujas de aire provocada por las turbulencias creadas en el
borde de las hélices en contacto con el líquido. En la Figura 5 se ilustra el fenómeno:
31
Figura 5. Cavitación por motores sumergidos en un líquido. a) ω = 0. b) ω < ωc. c) ω> ωc. Donde ω: frecuencia angular motor, ωc: frecuencia angular donde se produce cavitación [31].
Aireación o ventilación.
Efecto que consiste en la absorción de aire por medio de las hélices de los motores
debido al contacto con la superficie del líquido. La aireación también es producida
por la embarcación en sí misma. En la Figura 6 se ilustra el fenómeno de aireación:
Figura 6.Fenómeno de aireación del agua [32].
32
3.2.9 Hidrófonos.
Dispositivos que detectan los cambios de presión de una señal acústica en el agua,
produciendo a su salida un voltaje proporcional a la presión. Los hidrófonos
funcionan con un ancho de banda amplio aunque su punto en contra es la relación
señal a ruido que manejan. Es común en estos dispositivos que la señal más
pequeña detectable sea igual o ligeramente menor al ruido ambiente marítimo,
incluso el ruido del hidrófono puede incrementarse si se suma el ruido de los
preamplificadores, algunas veces siendo comparable o superando éste resultado el
ruido ambiente del mar. Para corregir este problema se hacen calibraciones de
sensibilidad de transductor con pruebas en ruidos ambientes marítimos [33].
Existen varios tipos transducción desde la señal en presión a la señal de voltaje, la
más utilizada en estos instrumentos son los materiales piezoeléctricos cerámicos,
principalmente por su facilidad al momento de darles forma. Esto ayuda a construir
numerosas formas de hidrófonos destinados a diferentes fines y propósitos. La
sensibilidad de todo el transductor depende de su encapsulado, de la dirección de
arribo de la señal, del material interno con que esté construido y de la frecuencia.
Por esta razón se manejan varias geometrías de hidrófonos y principios de
transducción dependiendo de la finalidad del dispositivo [33]. Algunos de éstos son:
Hidrófonos esféricos y circular-cilíndricos.
Son probablemente los más comunes, su diseño permite alta sensibilidad, ancho de
banda amplio sin alteraciones de nivel y suavizado en la frecuencia de resonancia.
Generalmente tienen baja impedancia, alta capacidad para soportar presión
hidrostática y son simples en sí mismos. El hidrófono utilizado en éste proyecto
pertenece a este grupo. [33].
Hidrófonos de planar.
Gracias a su forma son utilizados en arreglos de encapsulados cercanos, es decir,
son disposiciones de hidrófonos muy cerca uno del otro. Estos arreglos son usados
comúnmente para proporcionar un haz de captura específico, en otras palabras,
realizar una combinación de hidrófonos para crear un sistema direccional y así
enfatizar una fuente deseada [33].
Hidrófonos de vector.
Los hidrófonos comunes convierten la presión acústica en su análoga señal
eléctrica, pero este dato de presión es un escalar, así que no se cuenta con dirección
de llegada de la señal. Los hidrófonos de vector tienen la capacidad de capturar
magnitud y dirección de la presión, en otras palabras, capturan el vector de presión
33
que arriba a ellos. Este tipo de transductores son útiles a la hora de realizar arreglos
para localización de fuentes ya que se requieren solo dos o tres elementos,
suficientes para capturar la información necesaria [33].
3.3 Marco teórico.
Para el análisis de la señal capturada por el hidrófono es necesario realizar ciertas
operaciones matemáticas sobre la señal pare extraer información de ella. Los
procedimientos de manipulación de señal están descritos en el siguiente marco
teórico, describiendo la transformada de Fourier y sus diferentes formas de
calcularla; también se define qué son las funciones ventanas, cuáles son las más
comunes y por qué se utilizan en el desarrollo de este proyecto, se expondrá el tema
de la correlación y su utilidad para la clasificación de fuentes, por último la sesión
de filtros indica el diseño de los filtros aplicados a la señal capturada. Con las
operaciones matemáticas mencionadas es posible realizar un análisis de la señal y
determinar parámetros y valores de interés para el desarrollo del código.
3.3.1 Procesamiento digital de señales para obtención de firma acústica.
Transformada rápida de Fourier.
La transformada de Fourier es una herramienta para el análisis de componentes en
frecuencia de una señal, su función es transformar la señal del dominio del tiempo
al dominio de la frecuencia y así mostrar todo el contenido en frecuencia que forma
parte de la señal analizada. Dicha transformación es ampliamente usada en campos
como la ingeniería y la física, además es reversible, es decir, puede convertir una
función del tiempo a la frecuencia y de la frecuencia al tiempo. La expresión
matemática para realizar el cambio entre dominios es [34]:
𝐹(𝑤) = ∫ 𝑓(𝑡)𝑒−𝑖𝑤𝑡 𝑑𝑡
∞
−∞
(15)
La transformada de Fourier inversa está representada por la ecuación [34]:
𝑓(𝑡) =1
2𝜋∫ 𝐹(𝑤)𝑒𝑖𝑤𝑡𝑑𝑡∞
−∞
(16)
Generalmente se necesita analizar señales que no se encuentran en el dominio del
tiempo continuo, por ende se debe de hacer un cambio equivalente al tiempo
discreto, se debe tener en cuenta que en la discretización temporal también sufrirán
discretizaciones las frecuencias, así que el cambio debe ser congruente y afectar
34
de igual manera a ambos dominios. Con base en la necesidad anterior se define
entonces la transformada de Fourier discreta (DFT – por sus siglas en inglés):
𝑋(𝑘) = ∑ 𝑥(𝑛)𝑒−𝑗2𝜋𝑘𝑛/𝑁
𝑁−1
𝑛=0
𝑘 = 0,1,2, … ,𝑁 − 1 (17)
Así mismo existe la transformada inversa de Fourier discreta (IDFT-por sus siglas
en inglés):
𝑥(𝑛) =1
𝑁∑𝑋(𝑘)𝑒𝑗2𝜋𝑘𝑛/𝑁
𝑁−1
𝑘=0
𝑛 = 0,1,2, … ,𝑁 − 1 (18)
Las ecuaciones DFT y IDFT tienen un factor en contra y es su largo procedimiento
para el cálculo de cada uno de los factores 𝑘, se debe tener en cuenta que cada
factor 𝑘 es un número complejo, así que hallar su magnitud y su fase es un proceso
engorroso y de mucho consumo en tiempo hasta para computadoras. Si se fuera a
realizar un cálculo directo utilizando la DFT sería necesario [34] :
- 2N2 cálculos de funciones trigonométricas.
- 4N2 multiplicaciones reales.
- 4N(N-1) sumas reales.
Debido a la cantidad de cálculos necesarios para realizar computacionalmente una
transformada o antitransformada de Fourier, se codifican algoritmos con la
capacidad de realizar menor número de cálculos obteniendo los mismos resultados.
Función ventana.
Las ventanas en matemáticas son funciones encargadas de recortar el largo de una
señal para el análisis específico de una de sus partes, así evitar errores de
discontinuidades al principio o final de las señales. Este tipo de funciones son
usadas frecuentemente en el análisis y manipulación de señales, son útiles para
hallar promediados de información de la señal o filtración de datos en la misma.
Aplicar una ventana a una señal consiste solo en multiplicar la señal por la función
de la ventana respectiva, como resultado se tendrá la señal “ventaneada” con los
cambios en ella que la ventana provoque. Las ventanas modifican el espectro en
frecuencia de la señal, por esta razón existen varios tipos de ventanas que producen
en el espectro resultados diferentes, a continuación se presentan los más utilizados
[35].

35
Rectangular:
ℎ(𝑡) = {1 𝑠𝑖 𝑡 ∈ [0, 𝑇]0 𝑟𝑒𝑠𝑡𝑜
(18)
Hanning:
𝑤(𝑛) =1
2[1 − cos (
2𝜋𝑛
𝑁 − 1)] 0 ≤ 𝑛 < 𝑁 (19)
Barlett:
𝑤(𝑛) =
{
2𝑛
𝑁 − 1 0 ≤ 𝑛 ≤
𝑁 − 1
2
2 −2𝑛
𝑁 − 1 𝑁 − 1
2≤ 𝑛 < 𝑁
(20)
Hamming:
𝑤(𝑛) = 0,54 − 0,46 cos (2𝜋𝑛
𝑁 − 1) 0 ≤ 𝑛 < 𝑁 (21)
Blackman:
𝑤(𝑛) = 0,4 − 0,5 cos (2𝜋𝑛
𝑁 − 1) + 0,08 cos (
4𝜋𝑛
𝑁 − 1) 0 ≤ 𝑛 < 𝑁 (22)
donde:
𝑁: es el largo de la ventana a aplicar.
𝑛: son las muestras que entran dentro de la sección de la señal que se desea
ventanear.
El efecto que produce el ventaneo de una señal es mostrado en la Figura 7, con una
ventana rectangular y una hamming comparada con la señal sin ventanear [35]:
36
Figura 7. Muestra del efecto en el espectro en frecuencia de a) Ventana Rectangular, b) Ventana Hamming y c) Espectro exacto. Las ventanas fueron aplicadas con N = 21 [35].
Es apreciable la aparición de lóbulos en frecuencias de la Figura 7 al comparar la
señal exacta con el ventaneo; la disminución de estos lóbulos al aplicar hamming
es considerable, siendo ésta más similar a la señal original. El espectro también se
ve afectado en su amplitud, esto se debe a las características de corte de señal de
cada función ventana. Para la aplicación de ventanas se debe considerar el objetivo
de aplicarla y además el tipo de señal, la utilización de una ventana no adecuada
puede causar resultados inesperados, además por la influencia de cada ventana en
el espectro el resultado será diferente dependiendo de la función utilizada para el
corte.
Derrame Espectral (Spectral Leackage):
La convolución de la función ventada 𝑊(𝑓) con 𝑋(𝑓) produce un suavizado del
espectro de 𝑋(𝑓), sin embargo al convolucionar la señal 𝑋(𝑓) con los lóbulos
laterales de 𝑊(𝑓) produce energía de lóbulos laterales en la señal convolucionada
en frecuencias donde 𝑋(𝑓) = 0, este fenómeno se denomina derrame espectral
[34].
37
Correlación.
La función de correlación o correlación cruzada es una función matemática muy
parecida a la convolución, difiere en que a la señal desplazada no se refleja. Sirve
para comparar dos señales y determinar qué tanto se parecen morfológicamente.
Relaciona la intensidad media de dos señales en un intervalo de tiempo
especificado [34] [36].
Las técnicas de correlación son usadas en varios campos como en detección de
señales de radar/sonar cuando se aplica correlación entre la señal emitida y la señal
recibida de un objetivo, en la medicina cuando los ultrasonidos se usan para
detectar anomalías dentro del cuerpo humano, en comunicaciones, geología,
electrónica, física, entre otros [34] [36].
La correlación cruzada entre dos señales 𝑥(𝑡) y 𝑦(𝑡) está dada por la ecuación (23):
Rxy(t) ≜ 𝑥(𝑡)⨀𝑦(𝑡) = ∫ 𝑥(𝜏)ℎ(𝜏 − 𝑡)𝑑𝜏∞
−∞
= ∫ 𝑥(𝜏 + 𝑡)ℎ(𝜏)𝑑𝜏∞
−∞
(23)
Nótese que cuando 𝑥(𝑡) = 𝑦(𝑡):
Rxx(t) ≜ 𝑥(𝑡)⨀𝑥(𝑡) (24)
Esta es la llamada función de autocorrelación.
|𝑅𝑥𝑥(𝑡)| ≜ |𝑥(𝑡)⨀𝑥(𝑡)| ≤ 𝑅𝑥𝑥(0) (25)
La Ecuación 25, indica que cuando 𝑡 = 0, el valor absoluto de la autocorrelación es
igual o mayor que en cualquier otro instante de tiempo, la correlación en este
instante tiende a una función delta de Dirac [34].
Ahora suponga que se tienen dos señales discretas 𝑥(𝑛) y 𝑦(𝑛), la correlación
cruzada entre ambas señales está dada por:
𝛾𝑥𝑦(𝑙) = ∑ 𝑥(𝑛)𝑦(𝑛 − 𝑙)∞𝑛=−∞ 𝑙 = 0,±1, ±2,… (26)
Donde 𝑙 indica el “lag” o retardo, el cual es el parámetro de desplazamiento de la
señal en el tiempo [35].
38
Filtros IIR.
La implementación de filtros con respuesta infinita al impulso (IIR – por sus siglas
en inglés) son frecuentemente utilizados en el procesamiento de señales. La razón
principal de su uso es la simulación precisa que hacen de los filtros analógicos, que
es un campo del que se tiene un fundamento teórico vasto. Implementar un filtro IIR
requiere las siguientes condiciones [36]:
Calcular los valores de la salida en forma creciente, es decir, desde 𝑛 = −∞
hasta 𝑛 = ∞.
Utilizar los valores ya calculados de la salida para llegar a 𝑦[𝑛].
La Ecuación (27) indica el procedimiento para implementación de filtros IIR:
��[𝑛] = ∑𝑏𝑘
𝐿
𝑘=0
𝑥[𝑛 − 𝑘] +∑𝑎𝑟��[𝑛 − 𝑟]
𝑁
𝑟=1
(27)
donde:
𝑥[𝑛]: es la señal de audio.
𝑎 𝑦 𝑏: son coeficientes que definen el tipo de filtro.
��[𝑛]: es la señal de audio filtrada.
𝑁: número total de muestras de la señal.
𝐿: cantidad de valores previamente calculados.
Siempre que los valores de 𝑥[𝑛] se mantengan disponibles en forma consecutiva y
��[𝑛] se calcule de la misma manera, la operación será finita y se podrá realizar
muestra a muestra [36].
La Ecuación (27) puede ser representada por su función de transferencia, Ecuación
(28):
𝐻(𝑧) =𝑏0 + 𝑏1𝑧
−1 +⋯+ 𝑏𝐿𝑧−𝐿
1 − 𝑎1𝑧−1 −⋯− 𝑎𝑁𝑧−𝑁 (28)
Esta representación racional significa que su respuesta al impulso es una suma de
potencias. Además los coeficientes 𝑎 𝑦 𝑏 representan la caracterización del filtro, es
39
decir, dependiendo del valor que tomen estos coeficientes el filtro implementado
podrá ser Butterworth, Chebyshev u otro [36].
3.3.2 Estimación espectral de potencia.
La estimación de potencia es una parte importante en el algoritmo a desarrollar
porque es por medio de ésta como se diferenciarán las diferentes embarcaciones
que se aproximen. Los métodos expuestos a continuación dan como resultado la
potencia de la señal distribuida por unidad de Hz. De esta manera es posible
determinar cuáles son las frecuencias más representativas de la señal,
distinguiéndolas por su diferencia en niveles de potencia con respecto a las demás
frecuencias.
Teorema de Wiener-Khintchine.
La densidad espectral de energía de una señal, es la transformada de Fourier de su
función de autocorrelación. Esto significa que la función de autocorrelación de 𝑥(𝑛),
siendo 𝑥(𝑛) una señal real, y su densidad espectral de energía contienen la misma
información de la señal, sin embargo ninguna de estas dos funciones posee
información sobre la fase de la señal [34].
𝛾𝑋𝑋(𝑙)𝐹↔ 𝑆𝑋𝑋(𝜔) (29)
Densidad Espectral de Potencia (PSD).
Gran parte de los fenómenos que ocurren en la naturaleza se representan de mejor
manera como señales estocásticas y se caracterizan estadísticamente en términos
de valores medios, sin embargo se desconoce su comportamiento completo.
Cuando de señales aleatorias se trata, la función de autocorrelación representa el
promedio estadístico “apropiado” en el dominio del tiempo; la Transformada de
Fourier de la función de autocorrelación transforma el dominio temporal al dominio
de la frecuencia, donde los valores de magnitud representan la potencia de la señal
por unidad de frecuencia [34]. Ahora, si una señal es determinista, estacionaria y de
tiempo finito, esta posee energía finita y en consecuencia su Transformada de
Fourier existe, por lo tanto la manera de caracterizar este tipo de señales en el
dominio de la frecuencia es mediante la Densidad Espectral de Energía. Pero si se
trata de una señal estocástica o aleatoria estacionaria, no posee energía finita y su
Transformada de Fourier no existe, sin embargo posee potencia media finita, lo cual
40
hace que la manera apropiada de caracterizar este tipo de señales sea mediante la
Densidad Espectral de Potencia [34] [36].
Sea 𝑥(𝑡) una señal aleatoria estacionaria, su función de autocorrelación está dada
por la Ecuación (30) [34]:
𝛾𝑥𝑥(𝜏) = 𝐸[𝑥∗(𝑡)𝑥(𝑡 + 𝜏)] , (30)
donde:
𝐸[], es el operador esperanza o promedio estadístico.
Aplicando el teorema de Wiener-Khintchine, se tiene que:
Γ𝑥𝑥(𝐹) = ∫ 𝛾𝑥𝑥(𝜏)𝑒−𝑗𝜔𝜏𝑑𝑡
∞
−∞
(31)
Sin embargo como el proceso es aleatorio, solo se puede realizar la autocorrelación
sobre una realización del proceso, esto quiere decir que no se conoce 𝛾𝑋𝑋(𝜏) con
exactitud, por lo tanto tampoco se podría conocer la transformada de Fourier, pero
para poder calcularla, se tendría que suponer su ergodicidad, es decir, mirando una
sola realización del proceso desde −∞ a ∞ ya se tiene toda la información del
proceso. Esta propiedad permite que una sola realización del proceso pueda inferir
en el comportamiento estadístico de infinitas realizaciones del mismo [34] [36].
Suponiendo ergodicidad en el proceso, se puede calcular la función de
autocorrelación promediada en el tiempo mediante la Ecuación (32):
𝑅𝑥𝑥(𝜏) =1
2𝑇0∫ 𝑥∗(𝑡)𝑥(𝑡 + 𝜏) 𝑑𝑡𝑇0
−𝑇0
(32)
donde:
𝑇0, es la duración del intervalo observado
𝑅𝑥𝑥, es la función de autocorrelación promediada en el tiempo.
Ahora, por su ergodicidad se tiene que:
𝛾𝑥𝑥(𝜏) = lim𝑇0→∞
𝑅𝑥𝑥(𝜏) = lim𝑇0→∞
1
2𝑇0∫ 𝑥∗(𝑡)𝑥(𝑡 + 𝜏) 𝑑𝑡𝑇0
−𝑇0
(33)
Por último, la transformada de Fourier de la función de autocorrelación promediada
en el tiempo, produce una estimación 𝑃𝑥𝑥(𝐹) de la Densidad Espectral de Potencia.
Ahora, de manera discretizada:
41
𝑟𝑥𝑥(𝑚) =1
𝑁∑ 𝑥∗(𝑛)𝑥(𝑛 + 𝑚) 0 ≤ 𝑚 ≤ 𝑁 − 1
𝑁−𝑚−1
𝑛=0
(34)
𝑃𝑥𝑥(𝐹) = ∑ 𝑟𝑥𝑥(𝑚
𝑁−1
𝑚=−(𝑁−1)
)𝑒−𝑗𝜔𝑚 (35)
Sustituyendo:
𝑃𝑥𝑥(𝐹) =1
𝑁|∑ 𝑥(𝑛)𝑒−𝑗𝜔𝑚𝑁−1
𝑛=0
|
2
=1
𝑁|𝑋(𝑓)|2 (36)
Esta forma de estimar la densidad espectral de potencia es conocida como “El
Periodograma”, el cual sirve para detectar y medir las periodicidades escondidas en
los datos. El periodograma posee una limitante, su varianza, esto se debe a que
para señales aleatorias estacionarias la única manera de caracterizar su
comportamiento en frecuencia es mediante el promediado de un número finito de
datos, esto se hace mediante la aplicación de una ventana ya que la media del
espectro estimado solo es posible convolucionando el verdadero espectro de la
densidad de potencia Γ𝑥𝑥(𝐹) con una función ventana triangular de Barlett (Ecuación
20), lo que conlleva que la media del espectro estimado sufra de suavizado y
derrame espectral, causando así que la estima incremente su varianza [34] [36].
El periodograma en conclusión, no representa a la verdadera densidad espectral de
potencia, sin embargo es una aproximación útil, a medida que se tenga mayor
número de muestras mejor es la estimación, pero a mayor número de muestras,
mayor tiempo de procesamiento, no obstante por su simplicidad computacional es
útil hasta donde el tiempo de procesamiento sea relevante [34] [36].
Métodos no paramétricos para estimación espectral de potencia.
Los métodos no paramétricos para la estimación espectral de una señal son
algoritmos relativamente simples de implementar usando el principio de
funcionamiento de la transformada rápida de Fourier. Pero es necesario disponer
de una gran cantidad de datos para poder lograr una buena resolución en
frecuencia. Estos métodos de procesamiento pueden presentar problemas de
Leakage en frecuencias que podrían enmascarar señales débiles dentro del rango
de análisis útil [37].
42
Los métodos no paramétricos más conocidos son Barlett, Blackman y Tukey y el
método de Welch.
El Periodograma modificado.
La única diferencia que posee con el periodograma es una modificación en el cálculo
del espectro estimado, se convoluciona el verdadero espectro de la densidad de
potencia Γ𝑥𝑥(𝐹) con una ventana arbitraria 𝑤(𝑛) con duración 𝑀, esto permite que
se pueda elegir la ventana en función del ancho del lóbulo principal y el nivel de los
secundarios [34].
Está dado por la Ecuación (37):
��𝑥𝑥(𝑓) =1
𝑀𝑈|∑ 𝑥(𝑛)
𝑀−1
𝑛=0
𝑤(𝑛)𝑒−𝑗2𝜋𝑓𝑛|
2
(37)
Donde M representa un factor de solapamiento, U es un factor de normalización
para la potencia de la función ventana 𝑤(𝑛).
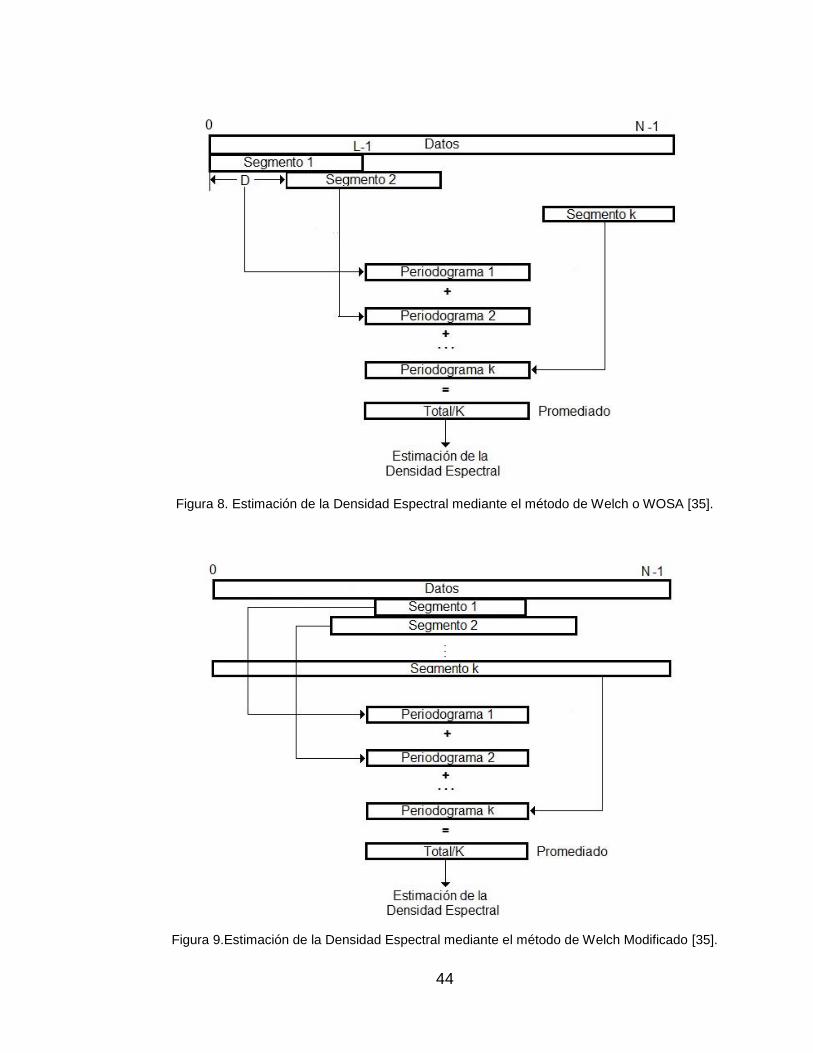
Método de Welch.
También llamado método de WOSA (Weighted Overlapped Segment Averaging)
Promedio Ponderado del Solapamiento de Segmentos. El método de Welch permite
reducir la varianza del periodograma. En estadística una manera de reducir la
varianza es mediante el promedio. Si en vez de tomar un solo periodograma se
promediara un determinado número de ellos se mejoraría la estima de la densidad
espectral de potencia y la varianza se reduciría [36].
Consiste en realizar el periodograma varias veces sobre un conjunto de datos
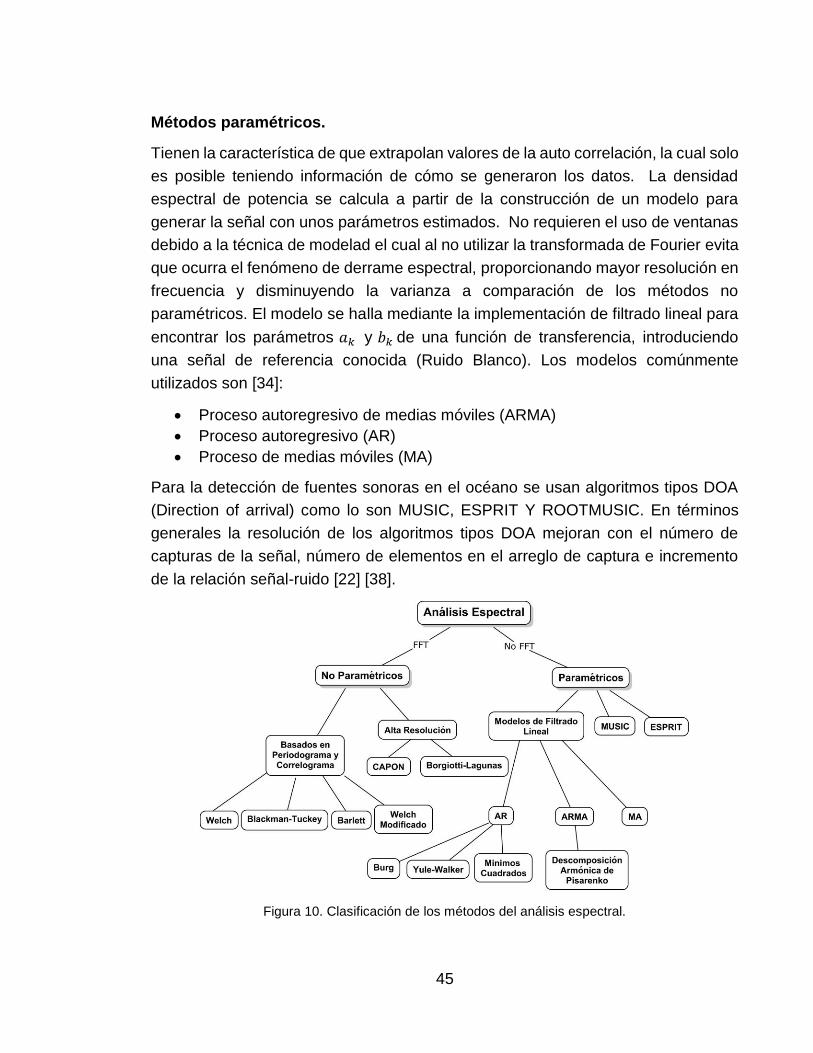
diferentes pertenecientes a la misma señal. La Figura 8 muestra un esquema del
funcionamiento del método de Welch, y la Figura 9 ilustra una variación del método,
denominado método de Welch Modificado [36].
Los datos se pueden representar mediante la expresión:
𝑥𝑖(𝑛) = 𝑥(𝑛 + 𝑖𝐷) (38)
𝑛 = 0,1, … ,𝑀 − 1 ; 𝑖 = 0,1, … , 𝐿 − 1
donde:
𝑖𝐷, representa el punto de inicio de la i-ésima secuencia.
43
𝐷, representa el factor de solapamiento.
El periodograma modificado está dado por la Ecuación (39):
��𝑥𝑥(𝑖)(𝑓) =
1
𝑀𝑈|∑ 𝑥𝑖(𝑛)
𝑀−1
𝑛=0
𝑤(𝑛)𝑒−𝑗2𝜋𝑓𝑛|
2
, 𝑖 = 0,1, … , 𝐿 − 1 (39)
Luego la estima de Welch de la potencia espectral consiste en el promedio de los
periodogramas modificados, la Ecuación (40) es el promedio del periodograma
modificado Ecuación (39).
𝑃𝑥𝑥𝑊(𝑓) =
1
𝐿∑��𝑥𝑥(𝑓)
𝐿−1
𝑖=0
(40)
44
Figura 8. Estimación de la Densidad Espectral mediante el método de Welch o WOSA [35].
Figura 9.Estimación de la Densidad Espectral mediante el método de Welch Modificado [35].
45
Métodos paramétricos.
Tienen la característica de que extrapolan valores de la auto correlación, la cual solo
es posible teniendo información de cómo se generaron los datos. La densidad
espectral de potencia se calcula a partir de la construcción de un modelo para
generar la señal con unos parámetros estimados. No requieren el uso de ventanas
debido a la técnica de modelad el cual al no utilizar la transformada de Fourier evita
que ocurra el fenómeno de derrame espectral, proporcionando mayor resolución en
frecuencia y disminuyendo la varianza a comparación de los métodos no
paramétricos. El modelo se halla mediante la implementación de filtrado lineal para
encontrar los parámetros 𝑎𝑘 y 𝑏𝑘 de una función de transferencia, introduciendo
una señal de referencia conocida (Ruido Blanco). Los modelos comúnmente
utilizados son [34]:
Proceso autoregresivo de medias móviles (ARMA)
Proceso autoregresivo (AR)
Proceso de medias móviles (MA)
Para la detección de fuentes sonoras en el océano se usan algoritmos tipos DOA
(Direction of arrival) como lo son MUSIC, ESPRIT Y ROOTMUSIC. En términos
generales la resolución de los algoritmos tipos DOA mejoran con el número de
capturas de la señal, número de elementos en el arreglo de captura e incremento
de la relación señal-ruido [22] [38].
Figura 10. Clasificación de los métodos del análisis espectral.
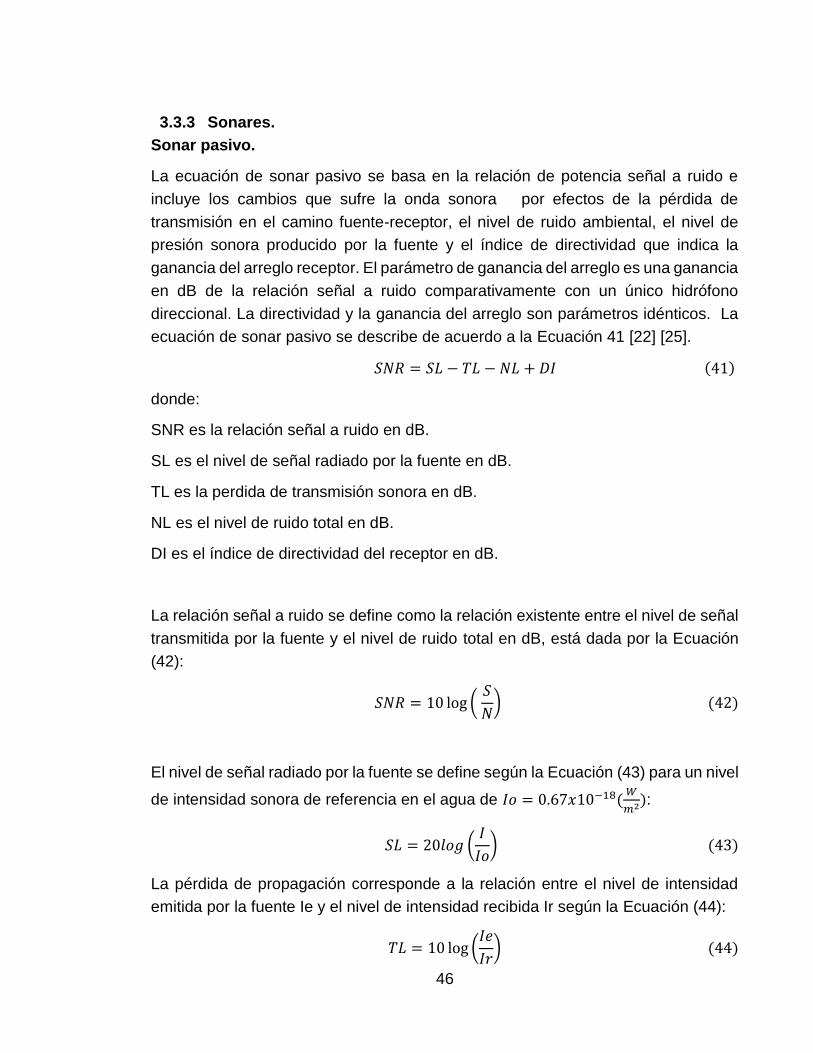
46
3.3.3 Sonares.
Sonar pasivo.
La ecuación de sonar pasivo se basa en la relación de potencia señal a ruido e
incluye los cambios que sufre la onda sonora por efectos de la pérdida de
transmisión en el camino fuente-receptor, el nivel de ruido ambiental, el nivel de
presión sonora producido por la fuente y el índice de directividad que indica la
ganancia del arreglo receptor. El parámetro de ganancia del arreglo es una ganancia
en dB de la relación señal a ruido comparativamente con un único hidrófono
direccional. La directividad y la ganancia del arreglo son parámetros idénticos. La
ecuación de sonar pasivo se describe de acuerdo a la Ecuación 41 [22] [25].
𝑆𝑁𝑅 = 𝑆𝐿 − 𝑇𝐿 − 𝑁𝐿 + 𝐷𝐼 (41)
donde:
SNR es la relación señal a ruido en dB.
SL es el nivel de señal radiado por la fuente en dB.
TL es la perdida de transmisión sonora en dB.
NL es el nivel de ruido total en dB.
DI es el índice de directividad del receptor en dB.
La relación señal a ruido se define como la relación existente entre el nivel de señal
transmitida por la fuente y el nivel de ruido total en dB, está dada por la Ecuación
(42):
𝑆𝑁𝑅 = 10 log ( 𝑆
𝑁) (42)
El nivel de señal radiado por la fuente se define según la Ecuación (43) para un nivel
de intensidad sonora de referencia en el agua de 𝐼𝑜 = 0.67𝑥10−18(𝑊
𝑚2):
𝑆𝐿 = 20𝑙𝑜𝑔 (𝐼
𝐼𝑜) (43)
La pérdida de propagación corresponde a la relación entre el nivel de intensidad
emitida por la fuente Ie y el nivel de intensidad recibida Ir según la Ecuación (44):
𝑇𝐿 = 10 log (𝐼𝑒
𝐼𝑟) (44)
47
El nivel de ruido NL es el nivel de intensidad de ruido para un nivel de intensidad de
referencia 𝐼𝑟𝑒𝑓 = 0.67𝑥10−18(𝑊
𝑚2)y está definido por la Ecuación (45):
𝑁𝐿 = 20 log (𝐿𝑟𝑢𝑖𝑑𝑜
𝐿𝑟𝑒𝑓) (45)
El índice de directividad DI esta dado según la Ecuación (46) donde 𝐼𝑜𝑚𝑛𝑖 es la
intensidad del ruido medida en un sensor omnidireccional e Idir es la intensidad del
ruido medida en un sensor direccional.
𝐷𝐼 = 𝐴𝐺 = 10𝑙𝑜𝑔 (𝐼𝑜𝑚𝑛𝑖
𝐼𝑑𝑖𝑟) (46)
La Ecuación (41) expresa que cuando una señal es radiada desde una fuente el
nivel de señal disminuye por efecto de la perdida de transmisión sonora del medio,
el nivel de ruido en el receptor degrada la señal recibida mientras que el factor de
directividad en el receptor mejora la relación señal a ruido del sistema [22] [25].
Sonar activo.
La ecuación de sonar activo tiene en cuenta que cuando una señal es emitida por
la fuente ésta se propaga hacia los obstáculos, se refleja y luego se transmite el
receptor. Estas reflexiones ocasionadas por el medio producto de choques de la
onda sonora con el fondo o las superficies marinas generan un nivel de ruido
adicional llamado ruido reverberante. La ecuación de sonar activo se presenta de
tres formas monoestática, biestática y multiestática siendo la monoestática la más
usada por su simplicidad como lo muestra la Ecuación (47) [22] [25].
𝑆𝑁𝑅 = 𝑆𝐿 − 2𝑇𝐿 + 𝑇𝑆 − 𝑁𝐿 + 𝐴𝐺 (47)
donde:
SNR es la relación señal a ruido en dB.
SL es el nivel de la fuente en dB.
TL es la perdida de transmisión en el medio en dB.
TS es la habilidad de un blanco para producir eco en dB.
NL es el nivel de ruido total en dB.
AG es el índice de directividad en dB.
48
TS por sus siglas en ingles de Target Strength se define como una relación entre la
intensidad acústica reflejada y la intensidad de la onda incidente, y está dada por la
Ecuación (48):
𝑇𝑆 = 10𝑙𝑜𝑔 (𝐼𝑟
𝐼𝑖) (48)
En la Ecuación (47) se tiene en cuenta el nivel de la fuente, la pérdida de
transmisión, la habilidad de la fuente de producir eco sobre cualquier obstáculo, el
nivel de ruido total y el factor de directividad del arreglo receptor [22] [25].
Firma Acústica
Una firma acústica es la caracterización en frecuencia de una fuente. Todas las
fuente acústicas poseen una distribución en frecuencia que las hace diferenciables,
esto depende de sus cualidades físicas y su modo de generación de sonido. La
forma y velocidad de propagación influyen en la manera en que la señal acústica es
captada por un receptor.
Para diferenciar embarcaciones que tengas espectros en frecuencia similares se
utilizan a menudo factores como niveles máximos, frecuencias principales,
relaciones entre picos relevantes, entre otros, que ayuden a distinguir una
embarcación de otras. También se ha usado el concepto de firma acústica para
calcular parámetros que representan cantidad de bajas frecuencias, medias y altas
en la música, permitiendo esto distinguir entre géneros musicales según los
resultados de dichos parámetros.
Los parámetros de diferenciación pueden ser obtenidos realizando operaciones
matemáticas que permitan una distinción entre espectros similares de fuentes
diferentes. La diferenciación se puede obtener de distintos procesos en el dominio
de la frecuencia, tales como transformada de Fourier, transformada corta de
Fourier, densidad espectral de potencia, espectrogramas, cepstrum, entre otros.
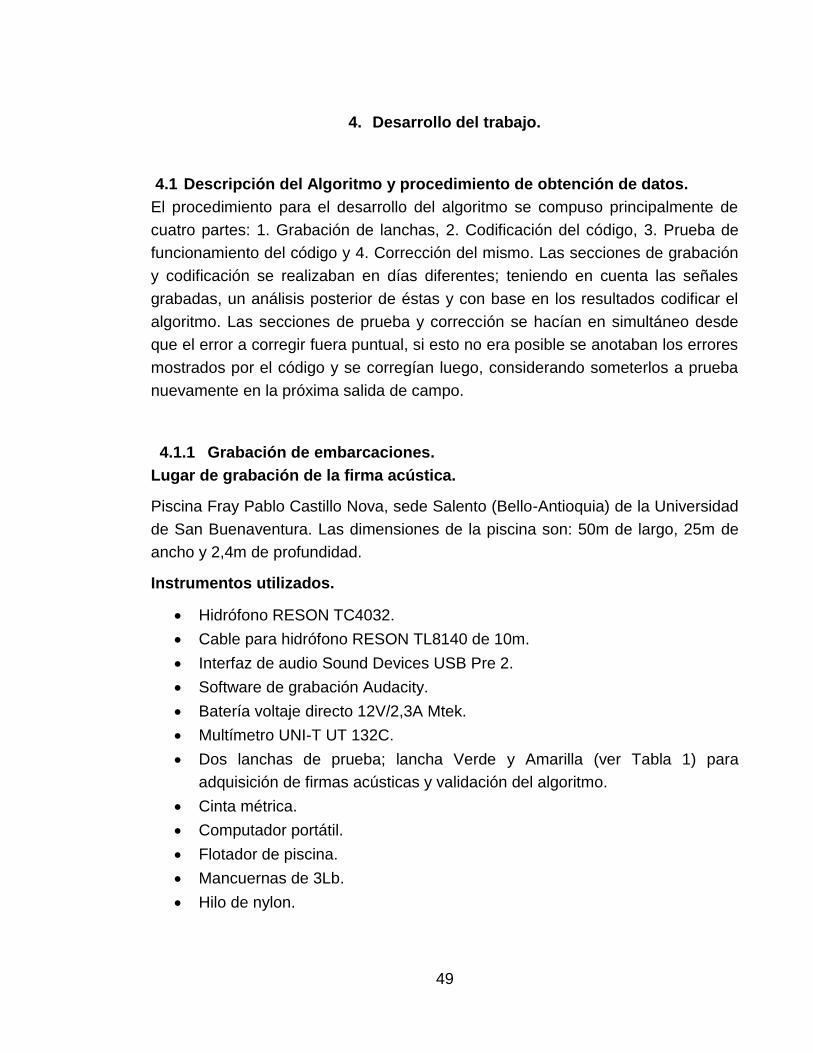
49
4. Desarrollo del trabajo.
4.1 Descripción del Algoritmo y procedimiento de obtención de datos.
El procedimiento para el desarrollo del algoritmo se compuso principalmente de
cuatro partes: 1. Grabación de lanchas, 2. Codificación del código, 3. Prueba de
funcionamiento del código y 4. Corrección del mismo. Las secciones de grabación
y codificación se realizaban en días diferentes; teniendo en cuenta las señales
grabadas, un análisis posterior de éstas y con base en los resultados codificar el
algoritmo. Las secciones de prueba y corrección se hacían en simultáneo desde
que el error a corregir fuera puntual, si esto no era posible se anotaban los errores
mostrados por el código y se corregían luego, considerando someterlos a prueba
nuevamente en la próxima salida de campo.
4.1.1 Grabación de embarcaciones.
Lugar de grabación de la firma acústica.
Piscina Fray Pablo Castillo Nova, sede Salento (Bello-Antioquia) de la Universidad
de San Buenaventura. Las dimensiones de la piscina son: 50m de largo, 25m de
ancho y 2,4m de profundidad.
Instrumentos utilizados.
Hidrófono RESON TC4032.
Cable para hidrófono RESON TL8140 de 10m.
Interfaz de audio Sound Devices USB Pre 2.
Software de grabación Audacity.
Batería voltaje directo 12V/2,3A Mtek.
Multímetro UNI-T UT 132C.
Dos lanchas de prueba; lancha Verde y Amarilla (ver Tabla 1) para
adquisición de firmas acústicas y validación del algoritmo.
Cinta métrica.
Computador portátil.
Flotador de piscina.
Mancuernas de 3Lb.
Hilo de nylon.
50
Tabla 1. Descripción de las embarcaciones de prueba.
Embarcación Referencia
Embarcación marca Hot Racing
ref DR-6 (dos motores)-
“Lancha 01”
Embarcación Speed Up Racing
Ref 01 (dos motores) – “Lancha
02”
4.1.2 Procedimiento de grabación.
Establecimiento de la ganancia de la interfaz Sound Devices: se dispuso a
grabar la señal de la lancha por medio del hidrófono a una distancia cercana. El
transductor estaba a poca profundidad de la superficie (solo estaba sumergido
hasta la totalidad del cuerpo del hidrófono), se posicionó cerca de superficies
reflectantes y se aceleró la lancha verde anclada al lado del hidrófono. Con las
anteriores condiciones de trabajo se establece un nivel de ganancia en la perilla de
la interfaz donde la señal no sea distorsionada por nivel. Cualquier otra condición
de trabajo será entonces con menor intensidad de señal en el hidrófono. El nivel
establecido se da cuando el indicador de la perilla está en el medio de los puntos 3
y 4 (contando de izquierda a derecha) marcados en la interfaz (ver Figura 11).
Figura 11. Nivel de pre-amplificación para la señal capturada por el hidrófono.
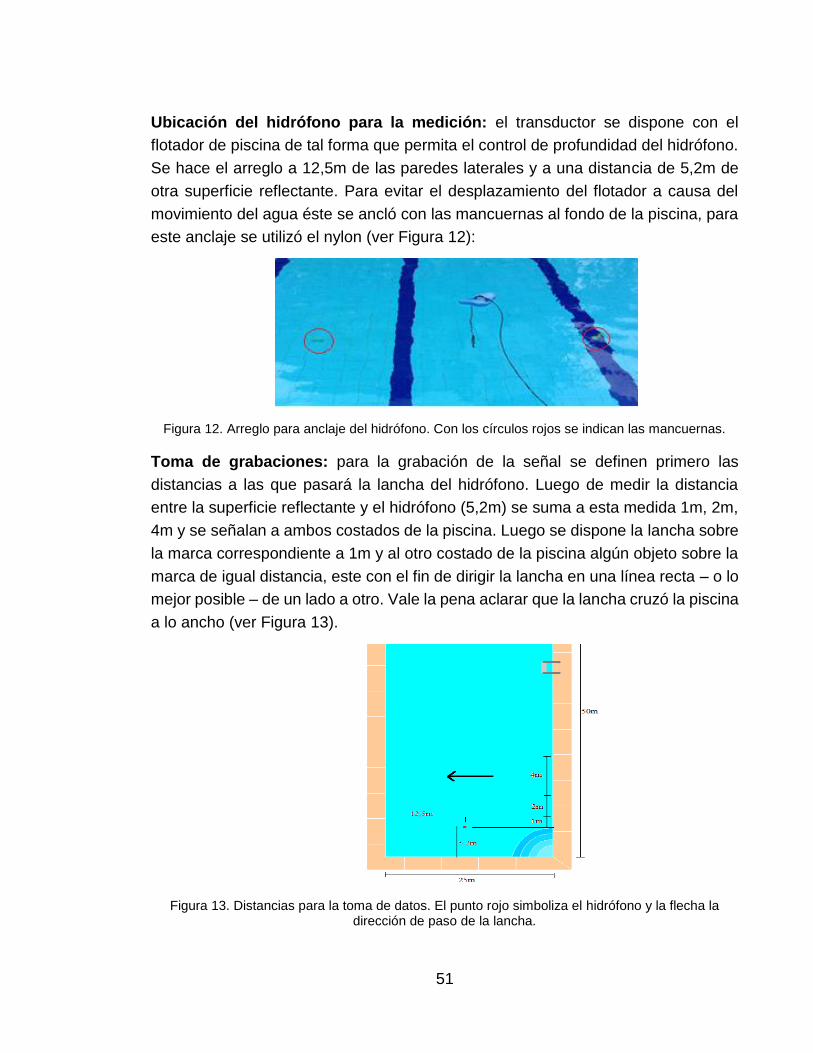
51
Ubicación del hidrófono para la medición: el transductor se dispone con el
flotador de piscina de tal forma que permita el control de profundidad del hidrófono.
Se hace el arreglo a 12,5m de las paredes laterales y a una distancia de 5,2m de
otra superficie reflectante. Para evitar el desplazamiento del flotador a causa del
movimiento del agua éste se ancló con las mancuernas al fondo de la piscina, para
este anclaje se utilizó el nylon (ver Figura 12):
Figura 12. Arreglo para anclaje del hidrófono. Con los círculos rojos se indican las mancuernas.
Toma de grabaciones: para la grabación de la señal se definen primero las
distancias a las que pasará la lancha del hidrófono. Luego de medir la distancia
entre la superficie reflectante y el hidrófono (5,2m) se suma a esta medida 1m, 2m,
4m y se señalan a ambos costados de la piscina. Luego se dispone la lancha sobre
la marca correspondiente a 1m y al otro costado de la piscina algún objeto sobre la
marca de igual distancia, este con el fin de dirigir la lancha en una línea recta – o lo
mejor posible – de un lado a otro. Vale la pena aclarar que la lancha cruzó la piscina
a lo ancho (ver Figura 13).
Figura 13. Distancias para la toma de datos. El punto rojo simboliza el hidrófono y la flecha la dirección de paso de la lancha.
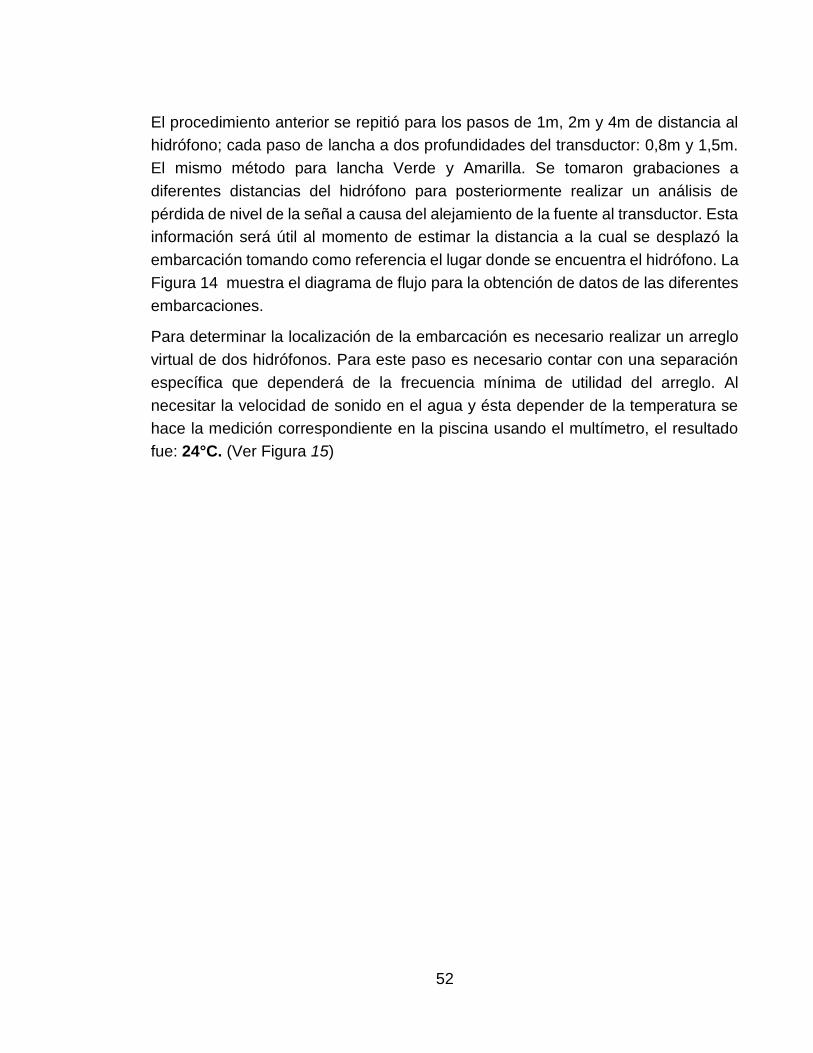
52
El procedimiento anterior se repitió para los pasos de 1m, 2m y 4m de distancia al
hidrófono; cada paso de lancha a dos profundidades del transductor: 0,8m y 1,5m.
El mismo método para lancha Verde y Amarilla. Se tomaron grabaciones a
diferentes distancias del hidrófono para posteriormente realizar un análisis de
pérdida de nivel de la señal a causa del alejamiento de la fuente al transductor. Esta
información será útil al momento de estimar la distancia a la cual se desplazó la
embarcación tomando como referencia el lugar donde se encuentra el hidrófono. La
Figura 14 muestra el diagrama de flujo para la obtención de datos de las diferentes
embarcaciones.
Para determinar la localización de la embarcación es necesario realizar un arreglo
virtual de dos hidrófonos. Para este paso es necesario contar con una separación
específica que dependerá de la frecuencia mínima de utilidad del arreglo. Al
necesitar la velocidad de sonido en el agua y ésta depender de la temperatura se
hace la medición correspondiente en la piscina usando el multímetro, el resultado
fue: 24°C. (Ver Figura 15)
53
Figura 14. Diagrama de flujo de la descripción del procedimiento.
54
Figura 15. Medición de temperatura en la piscina.
4.1.3 Codificación del algoritmo con base en el protocolo BPMN.
El protocolo BPMN (siglas en inglés de Business Process Model and Notation) [39],
es una notación gráfica estandarizada que permite modelar y explicar diferentes
procesos. Es usado en áreas como los negocios, los procesos industriales y en
programación para especificar el flujo de un código dado. La Figura 14 es un
ejemplo de un proceso ilustrado por medio del BPMN, mostrando al tiempo las
figuras usadas y su significado dentro del protocolo.
Proceso BPMN Algoritmo de detección.
Necesidad:
SIDACAM es un macro proyecto que nace de la necesidad de control y guardia en
zonas costeras del territorio colombiano por parte de la fuerza naval nacional. El
algoritmo desarrollado en este proyecto aportará al avance de SIDACAM en el
ámbito de la detección, clasificación y localización de fuentes a través de un
hidrófono. El código propuesto en el presente trabajo tendrá la capacidad de indicar
qué tipo de lancha ha pasado cerca al hidrófono (dispuesto en un lugar específico)
e indicar una distancia aproximada a la cual ha pasado la embarcación de la zona
de interés.
El algoritmo debe funcionar de manera eficiente y precisa, estos conceptos se
refieren a la rapidez con la cual debe hacer los cálculos respectivos para dar
respuesta, además de obtener una cantidad mínima de falsas alarmas (errores en
la clasificación) para evitar despliegues de operación innecesarios.
55
Actividades:
Proceso de reingeniería a un código de clasificación previamente
proporcionado: Se debe adecuar los parámetros de éste algoritmo para que sea
funcional con las condiciones en las cuáles se podrá a prueba. Para esta actividad
se requiere la grabación de firmas acústicas en condiciones controladas y con base
en dichas grabaciones cambiar los valores de cálculo para hacerlo efectivo.
Puesta a prueba del algoritmo rediseñado: luego de modificar los parámetros de
operación del algoritmo de clasificación se pondrá a prueba con diferentes señales
de entrada al sistema (lanchas a control remoto). El código debe advertir si se ha
detectado una embarcación cerca al hidrófono y deberá entregar una distancia
aproximada basada en información de umbrales.
Codificación del algoritmo de localización: para comenzar a desarrollar ésta
parte del trabajo se debe tener en correcto funcionamiento la sección de
clasificación. A continuación se graban trayectorias de la lancha con diferentes
posiciones de hidrófono con intención de manejar así un arreglo virtual de dos
hidrófonos; como opción alternativa está el aplicar un proceso de retraso a la señal
grabada para que parezca retrasada en el tiempo y suponer dicha señal como la
que llega a un “segundo” hidrófono. Teniendo listas las grabaciones se procede a la
codificación del algoritmo con base en la teoría encontrada en la revisión
bibliográfica. Vale la pena aclarar que con un solo hidrófono solo se puede dar una
estimación de la distancia a la cual la embarcación cruzó, sin embargo en código se
puede hacer una prueba como si existiesen dos señales y efectivamente mostrar si
la lancha pasó por un lado A o un lado B a X distancia.
Puesta a prueba del algoritmo de localización: en este parte del proceso se
verifica el funcionamiento del algoritmo de localización anotando sus aciertos y
errores. Se tendrá en consideración el tiempo de ejecución previo a dar respuesta
y la exactitud de la respuesta, es decir, qué tan preciso es su cálculo del ángulo de
arribo de la señal. Esta parte solo se podrá hacer en código, es decir, no se
implementará en la realidad puesto que no se cuenta con un segundo hidrófono
para someter el algoritmo a prueba.
Acople y funcionamiento de las secciones de clasificación y localización: en
este punto del proyecto se dispondrán ambos códigos (clasificación y localización)
como un único algoritmo. Con la anterior condición cumplida se someterá a prueba
el código esperando como respuesta la distinción de la lancha que ha pasado cerca
al hidrófono al tiempo que discrimina el lado en que pasó.
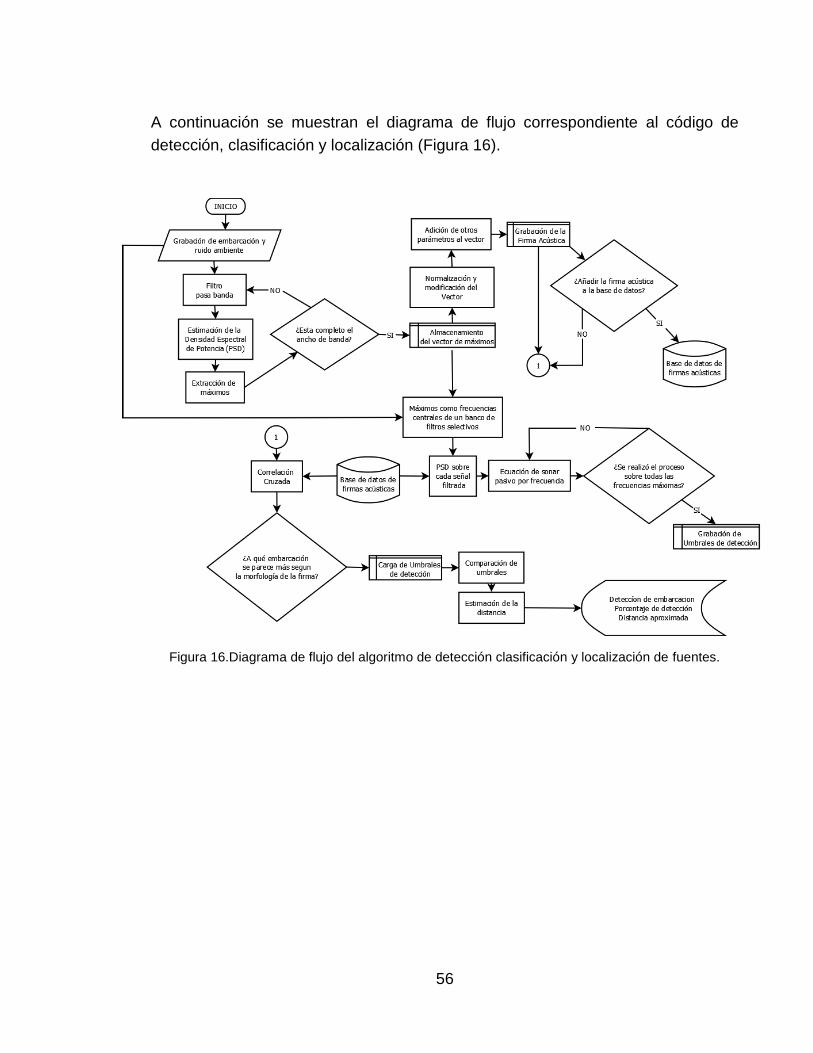
56
A continuación se muestran el diagrama de flujo correspondiente al código de
detección, clasificación y localización (Figura 16).
Figura 16.Diagrama de flujo del algoritmo de detección clasificación y localización de fuentes.
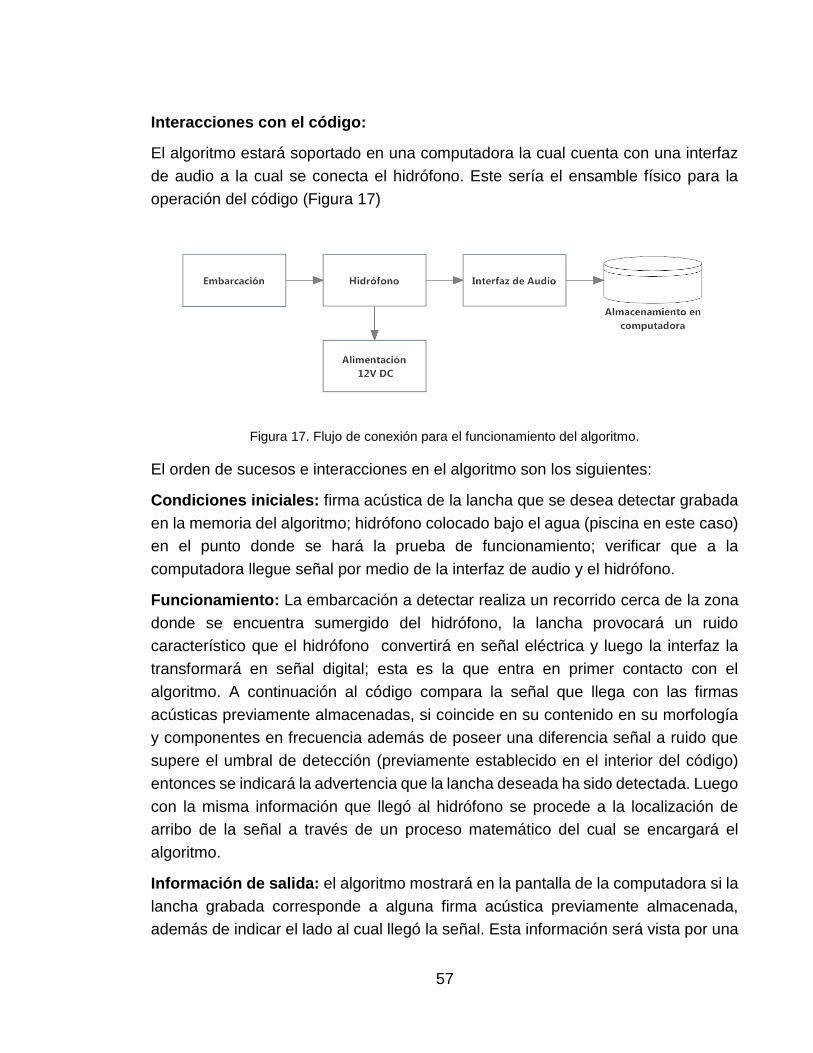
57
Interacciones con el código:
El algoritmo estará soportado en una computadora la cual cuenta con una interfaz
de audio a la cual se conecta el hidrófono. Este sería el ensamble físico para la
operación del código (Figura 17)
Figura 17. Flujo de conexión para el funcionamiento del algoritmo.
El orden de sucesos e interacciones en el algoritmo son los siguientes:
Condiciones iniciales: firma acústica de la lancha que se desea detectar grabada
en la memoria del algoritmo; hidrófono colocado bajo el agua (piscina en este caso)
en el punto donde se hará la prueba de funcionamiento; verificar que a la
computadora llegue señal por medio de la interfaz de audio y el hidrófono.
Funcionamiento: La embarcación a detectar realiza un recorrido cerca de la zona
donde se encuentra sumergido del hidrófono, la lancha provocará un ruido
característico que el hidrófono convertirá en señal eléctrica y luego la interfaz la
transformará en señal digital; esta es la que entra en primer contacto con el
algoritmo. A continuación al código compara la señal que llega con las firmas
acústicas previamente almacenadas, si coincide en su contenido en su morfología
y componentes en frecuencia además de poseer una diferencia señal a ruido que
supere el umbral de detección (previamente establecido en el interior del código)
entonces se indicará la advertencia que la lancha deseada ha sido detectada. Luego
con la misma información que llegó al hidrófono se procede a la localización de
arribo de la señal a través de un proceso matemático del cual se encargará el
algoritmo.
Información de salida: el algoritmo mostrará en la pantalla de la computadora si la
lancha grabada corresponde a alguna firma acústica previamente almacenada,
además de indicar el lado al cual llegó la señal. Esta información será vista por una
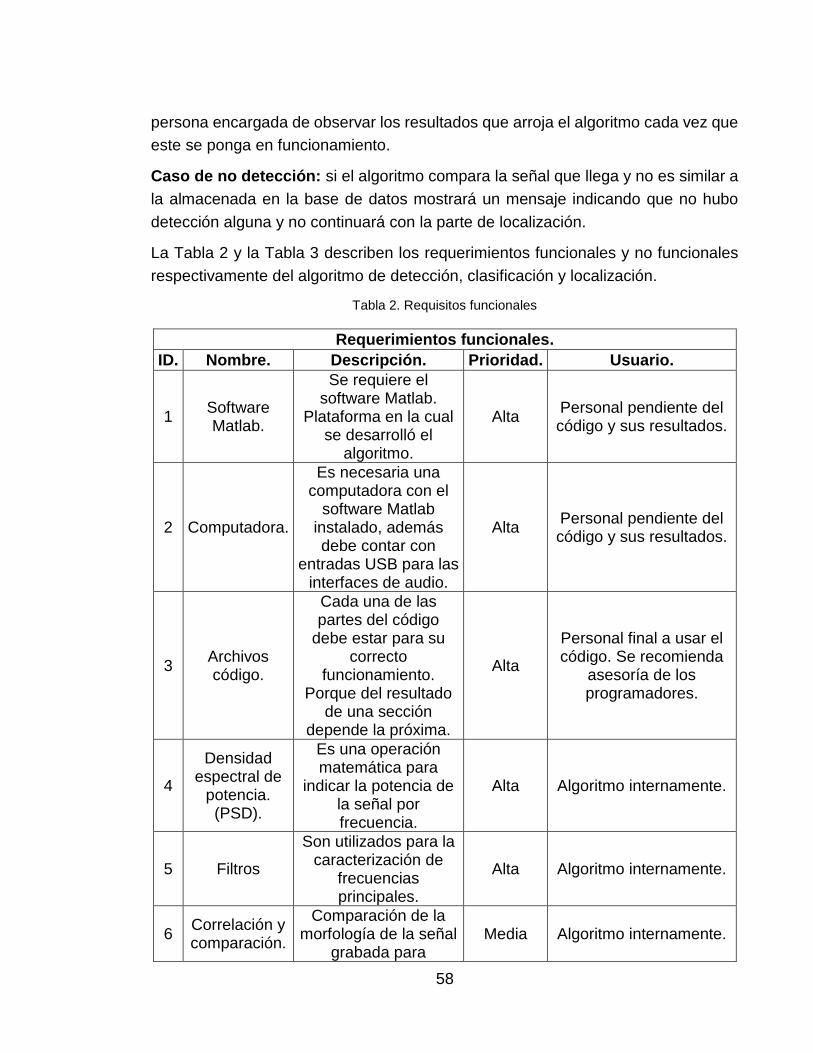
58
persona encargada de observar los resultados que arroja el algoritmo cada vez que
este se ponga en funcionamiento.
Caso de no detección: si el algoritmo compara la señal que llega y no es similar a
la almacenada en la base de datos mostrará un mensaje indicando que no hubo
detección alguna y no continuará con la parte de localización.
La Tabla 2 y la Tabla 3 describen los requerimientos funcionales y no funcionales
respectivamente del algoritmo de detección, clasificación y localización.
Tabla 2. Requisitos funcionales
Requerimientos funcionales.
ID. Nombre. Descripción. Prioridad. Usuario.
1 Software Matlab.
Se requiere el software Matlab.
Plataforma en la cual se desarrolló el
algoritmo.
Alta Personal pendiente del código y sus resultados.
2 Computadora.
Es necesaria una computadora con el
software Matlab instalado, además debe contar con
entradas USB para las interfaces de audio.
Alta Personal pendiente del código y sus resultados.
3 Archivos código.
Cada una de las partes del código
debe estar para su correcto
funcionamiento. Porque del resultado
de una sección depende la próxima.
Alta
Personal final a usar el código. Se recomienda
asesoría de los programadores.
4
Densidad espectral de
potencia. (PSD).
Es una operación matemática para
indicar la potencia de la señal por frecuencia.
Alta Algoritmo internamente.
5 Filtros
Son utilizados para la caracterización de
frecuencias principales.
Alta Algoritmo internamente.
6 Correlación y comparación.
Comparación de la morfología de la señal
grabada para Media Algoritmo internamente.
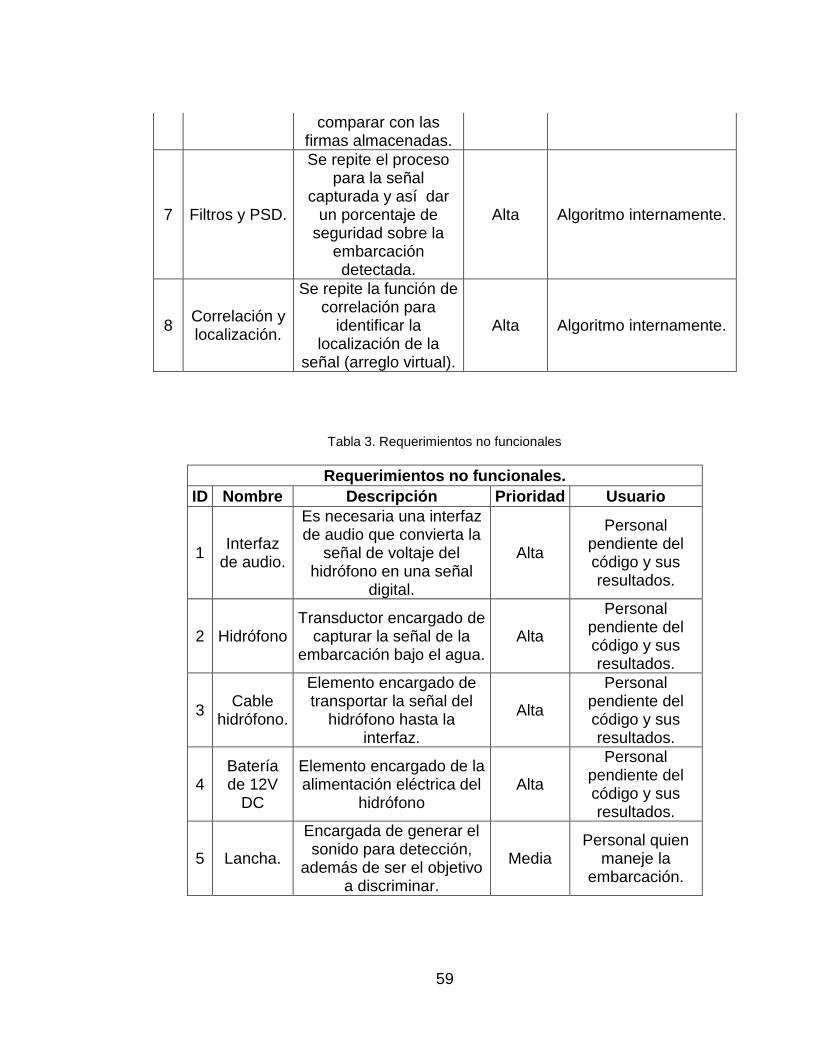
59
comparar con las firmas almacenadas.
7 Filtros y PSD.
Se repite el proceso para la señal
capturada y así dar un porcentaje de
seguridad sobre la embarcación detectada.
Alta Algoritmo internamente.
8 Correlación y localización.
Se repite la función de correlación para
identificar la localización de la
señal (arreglo virtual).
Alta Algoritmo internamente.
Tabla 3. Requerimientos no funcionales
Requerimientos no funcionales.
ID Nombre Descripción Prioridad Usuario
1 Interfaz
de audio.
Es necesaria una interfaz de audio que convierta la
señal de voltaje del hidrófono en una señal
digital.
Alta
Personal pendiente del código y sus resultados.
2 Hidrófono Transductor encargado de
capturar la señal de la embarcación bajo el agua.
Alta
Personal pendiente del código y sus resultados.
3 Cable
hidrófono.
Elemento encargado de transportar la señal del
hidrófono hasta la interfaz.
Alta
Personal pendiente del código y sus resultados.
4 Batería de 12V
DC
Elemento encargado de la alimentación eléctrica del
hidrófono Alta
Personal pendiente del código y sus resultados.
5 Lancha.
Encargada de generar el sonido para detección,
además de ser el objetivo a discriminar.
Media Personal quien
maneje la embarcación.
60
4.1.4 Pruebas de funcionamiento del código.
Las pruebas de funcionamiento del algoritmo se realizaron en la misma piscina
donde se realizaron las grabaciones. Se realizaban tanto en condiciones de
grabación de la lancha como en condiciones diferentes semejándose más a la
realidad, es decir, se pasaba la lancha a distancias diferentes a 1, 2 y 4m, con
trayectoria diagonal al hidrófono, a diferentes velocidades o con diferentes pesos
para así mirar la respuesta del código bajo variadas condiciones de funcionamiento
de la lancha.
Durante las pruebas se tomaban diferentes anotaciones con respecto al tiempo de
respuesta del código para dar resultados; qué cantidad de resultados eran los
esperados y cuáles no; cantidad de falsas alarmas y factores externos que podrían
modificar la respuesta del algoritmo (como proximidad del hidrófono a superficies
reflectantes). Se determinaban cuál de las variables que afectaban el resultado del
hidrófono eran momentáneas o cuales de funcionamiento normal, esto era útil al
modificar el algoritmo para hacerlo más adecuado al medio de prueba. Por último
se hacían apuntes de qué posiblemente era el error del código y cómo se podría
corregir, así pasar posteriormente a la etapa de corrección.
4.1.5 Corrección del código.
Las correcciones y modificaciones del código se realizaban al momento de
corroborar su funcionamiento siempre y cuando el problema fuera algo exacto y de
fácil detección al momento de la prueba. Ah no ser así, las correcciones se hacían
días diferentes, eso alargaba un poco el procedimiento porque se debía esperar la
próxima salida de campo para verificar si las correcciones efectuadas fueron
pertinentes y correctas.
Esta sección en el desarrollo del código fue importante porque ayudaba a la
optimización del algoritmo y a la reducción de errores y falsas alarmas, además se
notó la posibilidad de dar un plus al código donde no solo determinaba si una lancha
era o no era la pre-grabada, sino de contar con unas grabaciones previas de varias
lanchas y al pasar alguna determinar cuál de las ya grabadas era la lancha
detectada.
Después de realizar las correcciones y las pruebas necesarias, se somete el
algoritmo a una prueba final, donde debe indicar qué lancha pasó y a qué distancia
aproximadamente, además de mostrar un porcentaje de acierto en la lancha
detectada. Los resultados de estas pruebas fueron satisfactorios.
61
4.2 Consideraciones para la extracción de una firma acústica
4.2.1 Comparación entre FFT y PSD.
Uno de los interrogantes que se hicieron para poder realizar el análisis de la firma
acústica fue saber de qué manera se analizarían las características espectrales de
la lancha. Para ello se realizó una prueba entre la Transformada Rápida de Fourier
(FFT) y la Densidad Espectral de Potencia (PSD) analizando un recorrido de la
lancha en diferentes intervalos de tiempo. El recorrido que se capturó fue
segmentado mediante el software Protools en 9 instantes de igual duración, y
posteriormente se hizo el análisis con los diferentes métodos. La Figura 18 muestra
los resultados obtenidos mediante la FFT y la Figura 19 muestra los resultados
obtenidos mediante la PSD.
En la Figura 18.a se observa la FFT del recorrido completo y la Figura 18.b
igualmente muestra los resultados de la FFT para cada uno de los 9 segmentos. Se
tomó como referencia las frecuencias de 820.3 Hz y 1266 Hz, las cuales presentan
un pico de amplitud máxima para el recorrido completo, sin embargo se puede
apreciar en la Figura 18.b que en la mayoría de los instantes de tiempo 820.3 Hz
no corresponde a un máximo, solo se cumple en los instantes 1, 5 y 8, mientras que
en los demás instantes para esta frecuencia se llega a un valor intermedio o
inclusive mínimo, como en el instante 6, de igual manera la frecuencia de 1266 Hz
sólo es máxima en el instante 3, 6 y 7, en los demás instantes posee una amplitud
intermedia o mínima, como en el instante 2,5,8,9. Lo anterior demuestra que
usando la FFT las componentes en frecuencia de la firma de la lancha varían con
los instantes de tiempo, esto se debe a que la FFT es una medida de la amplitud de
las componentes espectrales presentes específicamente en ese intervalo de
tiempo, razón por la cual cualquier evento inesperado podría alterar la estimación,
además a pesar de la variación en frecuencia en la que se presentan diferentes
máximos de amplitud existen cancelaciones significativas, a causa de que la
magnitud de la FFT es dependiente de la fase y sensible a condiciones del medio
como distancias lancha-hidrófono, esto causa que ciertas frecuencias asociadas a
dicha separación se encuentren en contrafase y por lo tanto se cancelen.
Por otro lado en la Figura 19 se muestra la Densidad Espectral de Potencia en cada
uno de estos instantes. Se percibe que en cada segmento de tiempo, los máximos
de potencia de la señal se dan siempre en la misma frecuencia y entre ellos solo
existen variaciones de nivel, por esta razón al buscar las características y el
comportamiento en frecuencia propio de la fuente es preferible utilizar la Densidad
Espectral de Potencia.
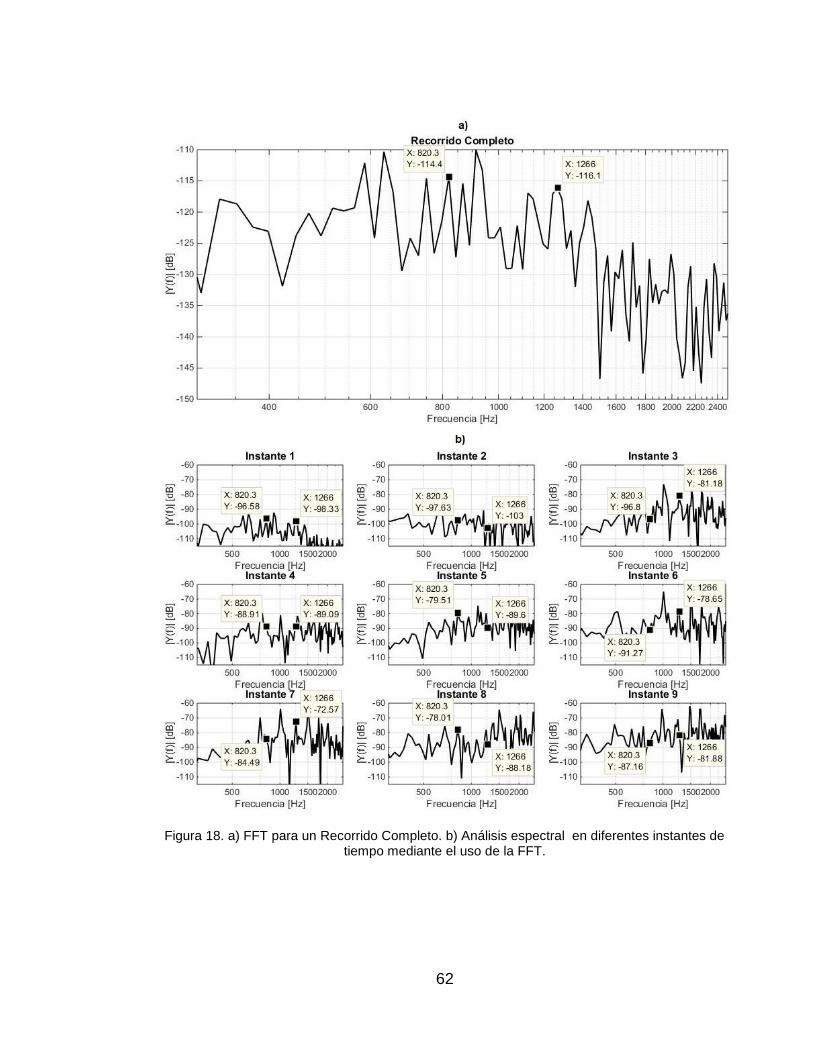
62
Figura 18. a) FFT para un Recorrido Completo. b) Análisis espectral en diferentes instantes de tiempo mediante el uso de la FFT.
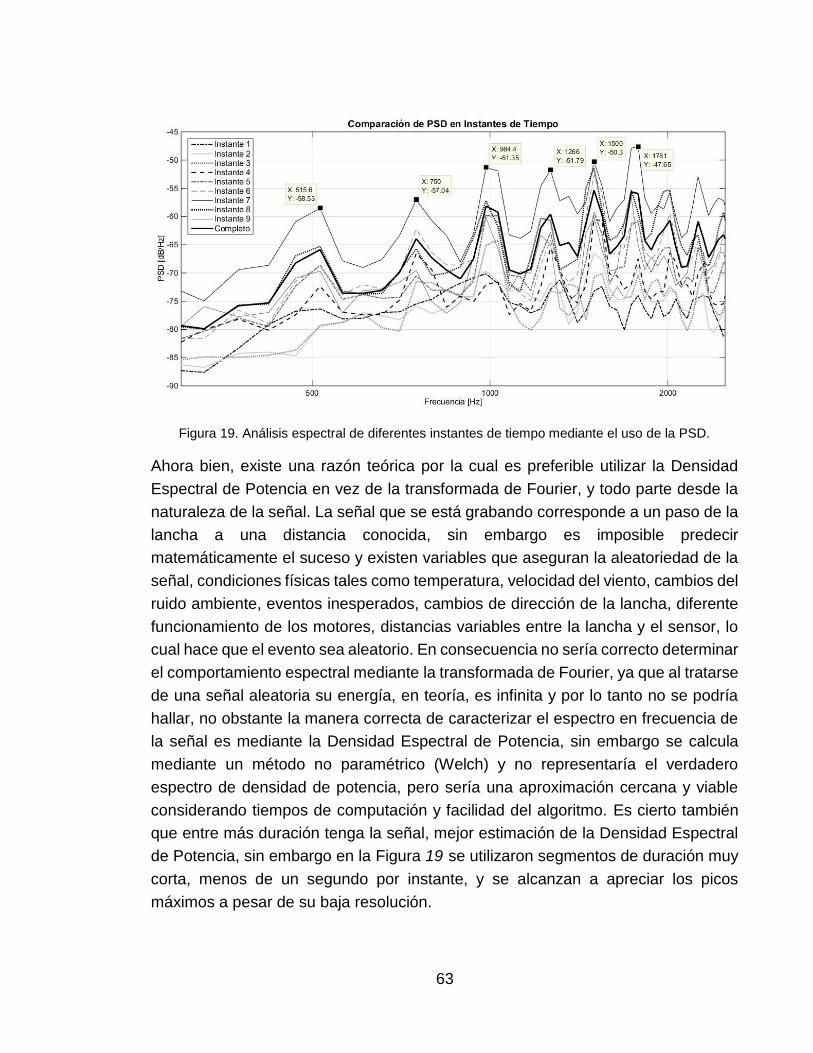
63
Figura 19. Análisis espectral de diferentes instantes de tiempo mediante el uso de la PSD.
Ahora bien, existe una razón teórica por la cual es preferible utilizar la Densidad
Espectral de Potencia en vez de la transformada de Fourier, y todo parte desde la
naturaleza de la señal. La señal que se está grabando corresponde a un paso de la
lancha a una distancia conocida, sin embargo es imposible predecir
matemáticamente el suceso y existen variables que aseguran la aleatoriedad de la
señal, condiciones físicas tales como temperatura, velocidad del viento, cambios del
ruido ambiente, eventos inesperados, cambios de dirección de la lancha, diferente
funcionamiento de los motores, distancias variables entre la lancha y el sensor, lo
cual hace que el evento sea aleatorio. En consecuencia no sería correcto determinar
el comportamiento espectral mediante la transformada de Fourier, ya que al tratarse
de una señal aleatoria su energía, en teoría, es infinita y por lo tanto no se podría
hallar, no obstante la manera correcta de caracterizar el espectro en frecuencia de
la señal es mediante la Densidad Espectral de Potencia, sin embargo se calcula
mediante un método no paramétrico (Welch) y no representaría el verdadero
espectro de densidad de potencia, pero sería una aproximación cercana y viable
considerando tiempos de computación y facilidad del algoritmo. Es cierto también
que entre más duración tenga la señal, mejor estimación de la Densidad Espectral
de Potencia, sin embargo en la Figura 19 se utilizaron segmentos de duración muy
corta, menos de un segundo por instante, y se alcanzan a apreciar los picos
máximos a pesar de su baja resolución.
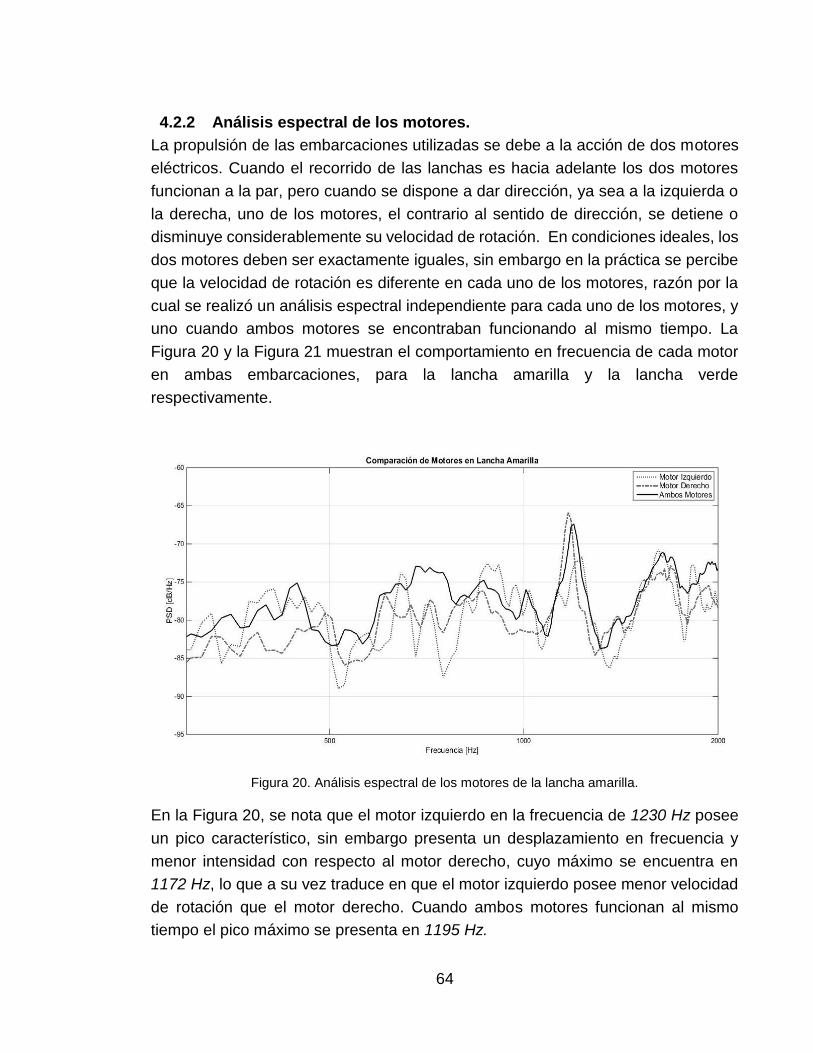
64
4.2.2 Análisis espectral de los motores.
La propulsión de las embarcaciones utilizadas se debe a la acción de dos motores
eléctricos. Cuando el recorrido de las lanchas es hacia adelante los dos motores
funcionan a la par, pero cuando se dispone a dar dirección, ya sea a la izquierda o
la derecha, uno de los motores, el contrario al sentido de dirección, se detiene o
disminuye considerablemente su velocidad de rotación. En condiciones ideales, los
dos motores deben ser exactamente iguales, sin embargo en la práctica se percibe
que la velocidad de rotación es diferente en cada uno de los motores, razón por la
cual se realizó un análisis espectral independiente para cada uno de los motores, y
uno cuando ambos motores se encontraban funcionando al mismo tiempo. La
Figura 20 y la Figura 21 muestran el comportamiento en frecuencia de cada motor
en ambas embarcaciones, para la lancha amarilla y la lancha verde
respectivamente.
Figura 20. Análisis espectral de los motores de la lancha amarilla.
En la Figura 20, se nota que el motor izquierdo en la frecuencia de 1230 Hz posee
un pico característico, sin embargo presenta un desplazamiento en frecuencia y
menor intensidad con respecto al motor derecho, cuyo máximo se encuentra en
1172 Hz, lo que a su vez traduce en que el motor izquierdo posee menor velocidad
de rotación que el motor derecho. Cuando ambos motores funcionan al mismo
tiempo el pico máximo se presenta en 1195 Hz.
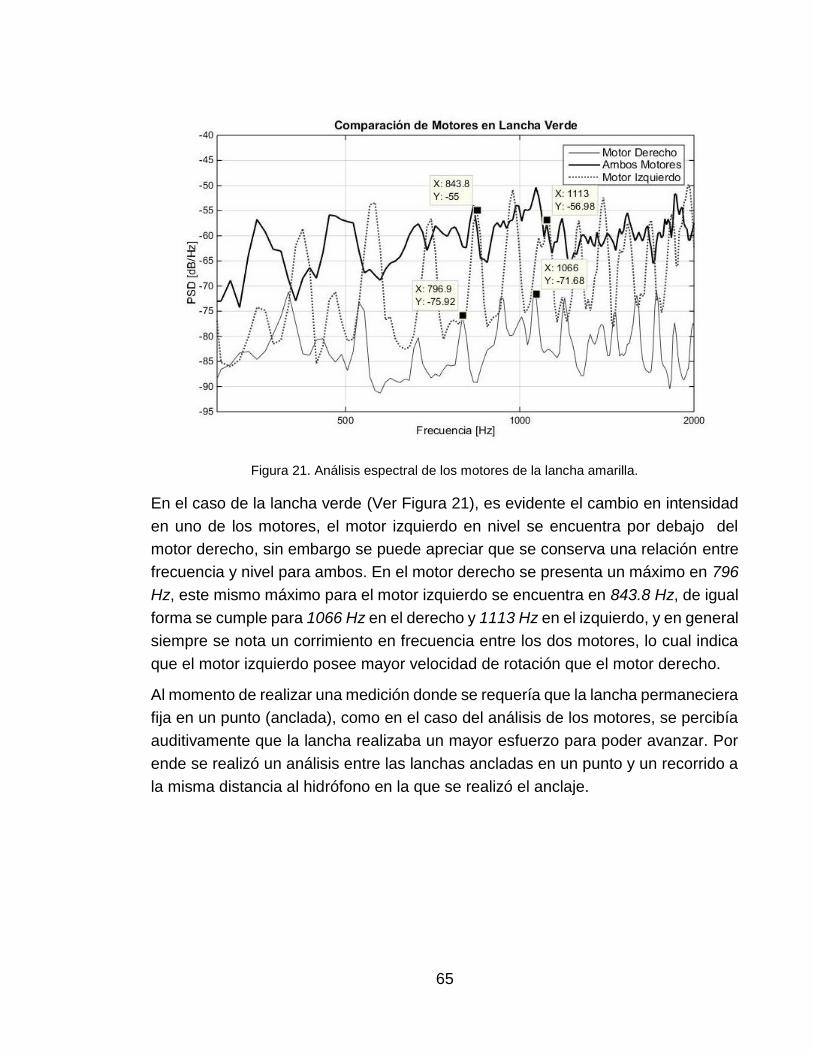
65
Figura 21. Análisis espectral de los motores de la lancha amarilla.
En el caso de la lancha verde (Ver Figura 21), es evidente el cambio en intensidad
en uno de los motores, el motor izquierdo en nivel se encuentra por debajo del
motor derecho, sin embargo se puede apreciar que se conserva una relación entre
frecuencia y nivel para ambos. En el motor derecho se presenta un máximo en 796
Hz, este mismo máximo para el motor izquierdo se encuentra en 843.8 Hz, de igual
forma se cumple para 1066 Hz en el derecho y 1113 Hz en el izquierdo, y en general
siempre se nota un corrimiento en frecuencia entre los dos motores, lo cual indica
que el motor izquierdo posee mayor velocidad de rotación que el motor derecho.
Al momento de realizar una medición donde se requería que la lancha permaneciera
fija en un punto (anclada), como en el caso del análisis de los motores, se percibía
auditivamente que la lancha realizaba un mayor esfuerzo para poder avanzar. Por
ende se realizó un análisis entre las lanchas ancladas en un punto y un recorrido a
la misma distancia al hidrófono en la que se realizó el anclaje.
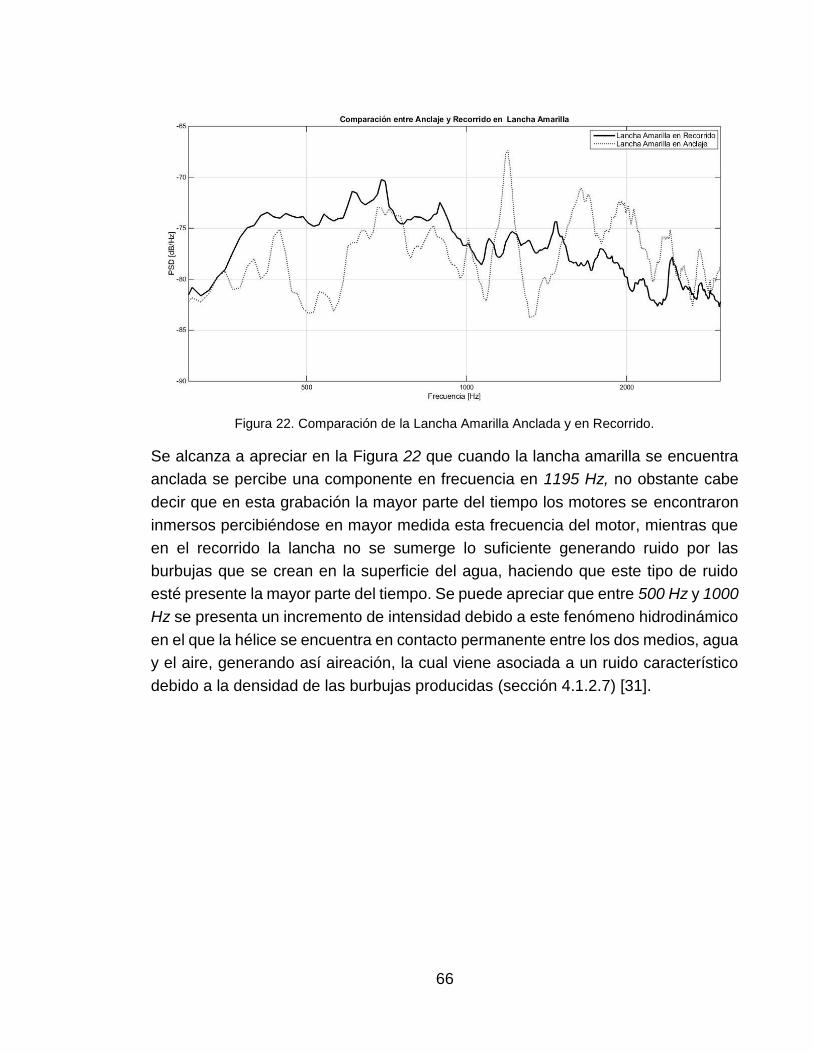
66
Figura 22. Comparación de la Lancha Amarilla Anclada y en Recorrido.
Se alcanza a apreciar en la Figura 22 que cuando la lancha amarilla se encuentra
anclada se percibe una componente en frecuencia en 1195 Hz, no obstante cabe
decir que en esta grabación la mayor parte del tiempo los motores se encontraron
inmersos percibiéndose en mayor medida esta frecuencia del motor, mientras que
en el recorrido la lancha no se sumerge lo suficiente generando ruido por las
burbujas que se crean en la superficie del agua, haciendo que este tipo de ruido
esté presente la mayor parte del tiempo. Se puede apreciar que entre 500 Hz y 1000
Hz se presenta un incremento de intensidad debido a este fenómeno hidrodinámico
en el que la hélice se encuentra en contacto permanente entre los dos medios, agua
y el aire, generando así aireación, la cual viene asociada a un ruido característico
debido a la densidad de las burbujas producidas (sección 4.1.2.7) [31].
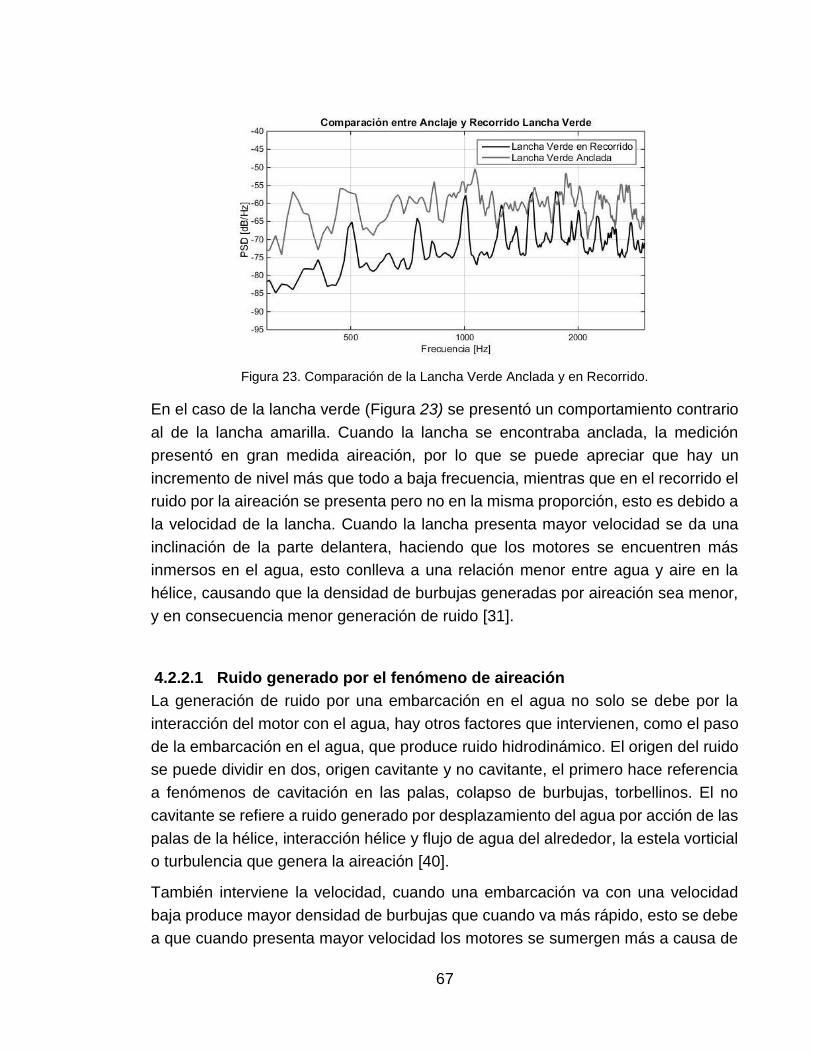
67
Figura 23. Comparación de la Lancha Verde Anclada y en Recorrido.
En el caso de la lancha verde (Figura 23) se presentó un comportamiento contrario
al de la lancha amarilla. Cuando la lancha se encontraba anclada, la medición
presentó en gran medida aireación, por lo que se puede apreciar que hay un
incremento de nivel más que todo a baja frecuencia, mientras que en el recorrido el
ruido por la aireación se presenta pero no en la misma proporción, esto es debido a
la velocidad de la lancha. Cuando la lancha presenta mayor velocidad se da una
inclinación de la parte delantera, haciendo que los motores se encuentren más
inmersos en el agua, esto conlleva a una relación menor entre agua y aire en la
hélice, causando que la densidad de burbujas generadas por aireación sea menor,
y en consecuencia menor generación de ruido [31].
4.2.2.1 Ruido generado por el fenómeno de aireación
La generación de ruido por una embarcación en el agua no solo se debe por la
interacción del motor con el agua, hay otros factores que intervienen, como el paso
de la embarcación en el agua, que produce ruido hidrodinámico. El origen del ruido
se puede dividir en dos, origen cavitante y no cavitante, el primero hace referencia
a fenómenos de cavitación en las palas, colapso de burbujas, torbellinos. El no
cavitante se refiere a ruido generado por desplazamiento del agua por acción de las
palas de la hélice, interacción hélice y flujo de agua del alrededor, la estela vorticial
o turbulencia que genera la aireación [40].
También interviene la velocidad, cuando una embarcación va con una velocidad
baja produce mayor densidad de burbujas que cuando va más rápido, esto se debe
a que cuando presenta mayor velocidad los motores se sumergen más a causa de
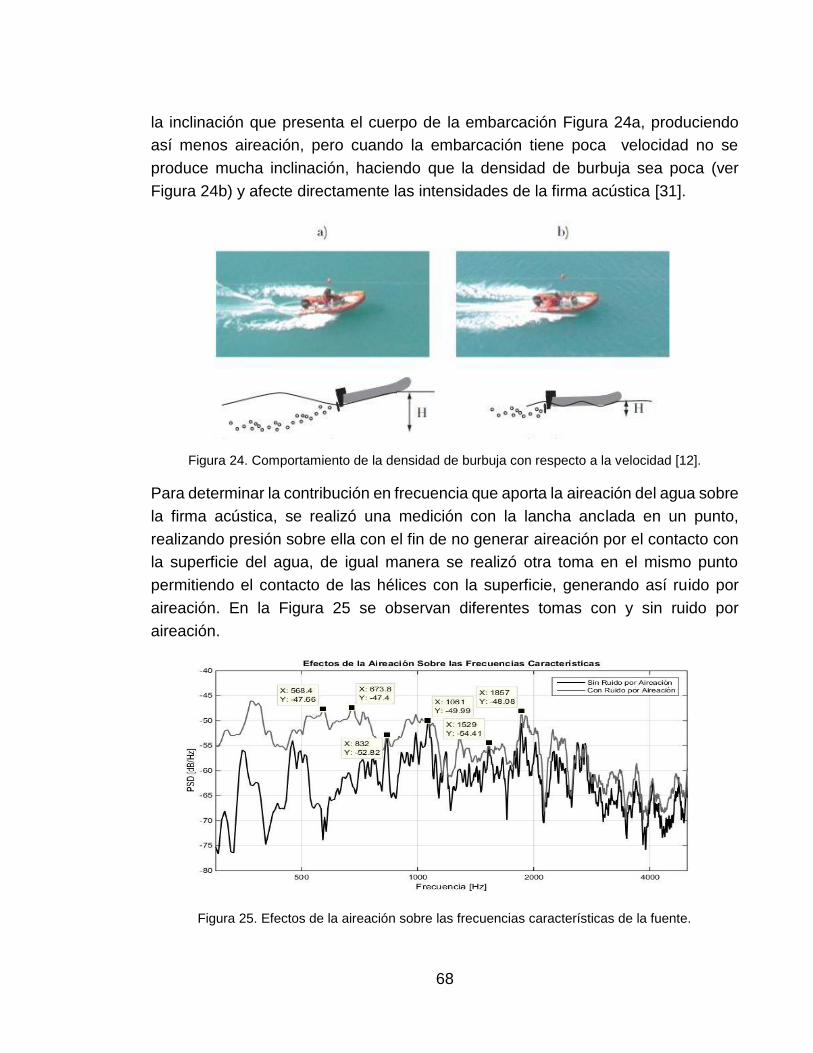
68
la inclinación que presenta el cuerpo de la embarcación Figura 24a, produciendo
así menos aireación, pero cuando la embarcación tiene poca velocidad no se
produce mucha inclinación, haciendo que la densidad de burbuja sea poca (ver
Figura 24b) y afecte directamente las intensidades de la firma acústica [31].
Figura 24. Comportamiento de la densidad de burbuja con respecto a la velocidad [12].
Para determinar la contribución en frecuencia que aporta la aireación del agua sobre
la firma acústica, se realizó una medición con la lancha anclada en un punto,
realizando presión sobre ella con el fin de no generar aireación por el contacto con
la superficie del agua, de igual manera se realizó otra toma en el mismo punto
permitiendo el contacto de las hélices con la superficie, generando así ruido por
aireación. En la Figura 25 se observan diferentes tomas con y sin ruido por
aireación.
Figura 25. Efectos de la aireación sobre las frecuencias características de la fuente.
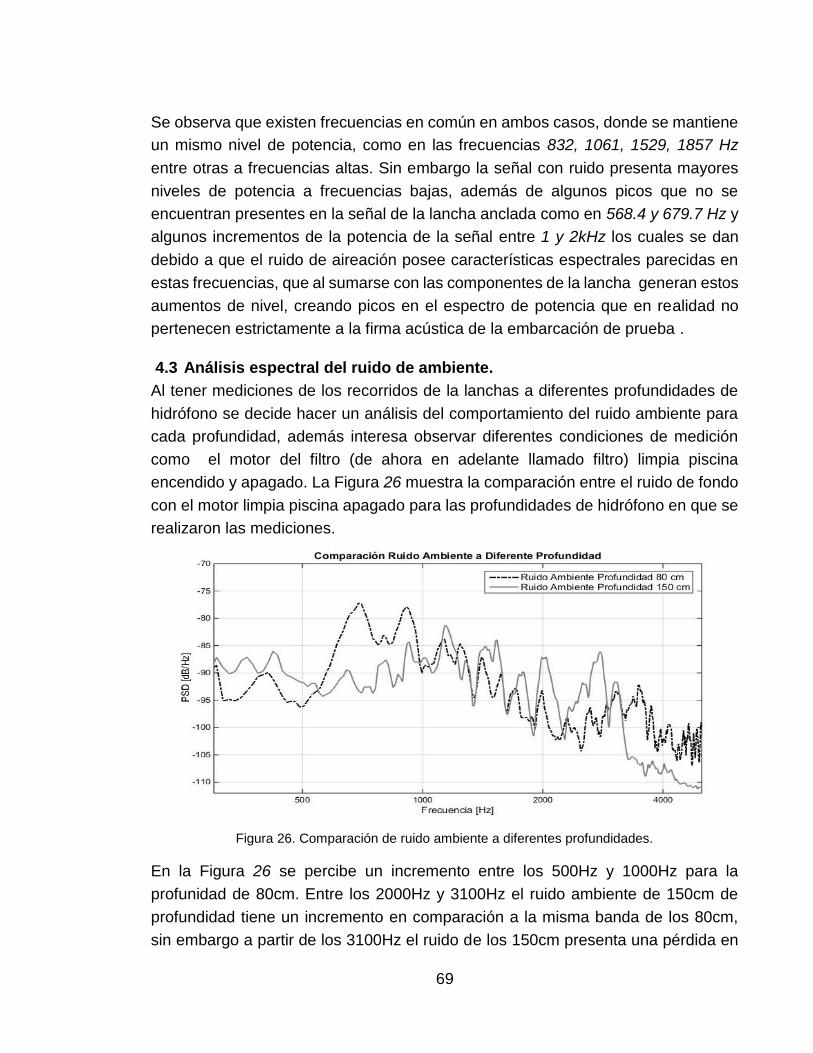
69
Se observa que existen frecuencias en común en ambos casos, donde se mantiene
un mismo nivel de potencia, como en las frecuencias 832, 1061, 1529, 1857 Hz
entre otras a frecuencias altas. Sin embargo la señal con ruido presenta mayores
niveles de potencia a frecuencias bajas, además de algunos picos que no se
encuentran presentes en la señal de la lancha anclada como en 568.4 y 679.7 Hz y
algunos incrementos de la potencia de la señal entre 1 y 2kHz los cuales se dan
debido a que el ruido de aireación posee características espectrales parecidas en
estas frecuencias, que al sumarse con las componentes de la lancha generan estos
aumentos de nivel, creando picos en el espectro de potencia que en realidad no
pertenecen estrictamente a la firma acústica de la embarcación de prueba .
4.3 Análisis espectral del ruido de ambiente.
Al tener mediciones de los recorridos de la lanchas a diferentes profundidades de
hidrófono se decide hacer un análisis del comportamiento del ruido ambiente para
cada profundidad, además interesa observar diferentes condiciones de medición
como el motor del filtro (de ahora en adelante llamado filtro) limpia piscina
encendido y apagado. La Figura 26 muestra la comparación entre el ruido de fondo
con el motor limpia piscina apagado para las profundidades de hidrófono en que se
realizaron las mediciones.
Figura 26. Comparación de ruido ambiente a diferentes profundidades.
En la Figura 26 se percibe un incremento entre los 500Hz y 1000Hz para la
profunidad de 80cm. Entre los 2000Hz y 3100Hz el ruido ambiente de 150cm de
profundidad tiene un incremento en comparación a la misma banda de los 80cm,
sin embargo a partir de los 3100Hz el ruido de los 150cm presenta una pérdida en
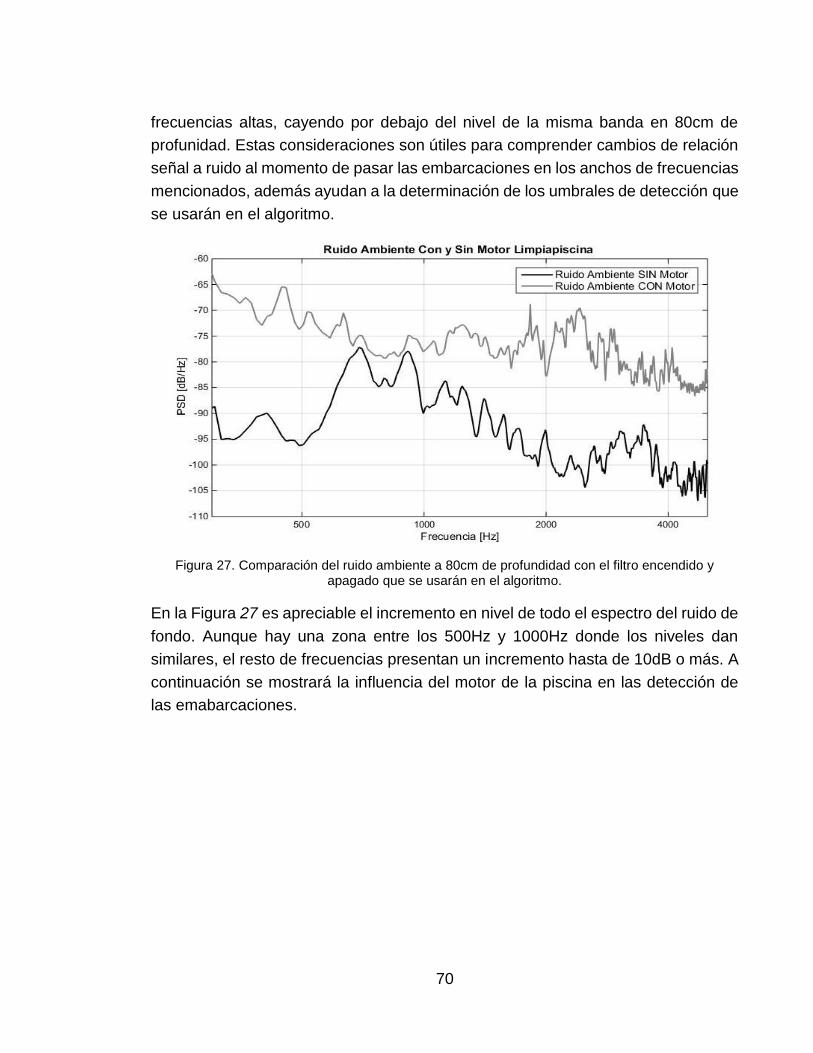
70
frecuencias altas, cayendo por debajo del nivel de la misma banda en 80cm de
profunidad. Estas consideraciones son útiles para comprender cambios de relación
señal a ruido al momento de pasar las embarcaciones en los anchos de frecuencias
mencionados, además ayudan a la determinación de los umbrales de detección que
se usarán en el algoritmo.
Figura 27. Comparación del ruido ambiente a 80cm de profundidad con el filtro encendido y apagado que se usarán en el algoritmo.
En la Figura 27 es apreciable el incremento en nivel de todo el espectro del ruido de
fondo. Aunque hay una zona entre los 500Hz y 1000Hz donde los niveles dan
similares, el resto de frecuencias presentan un incremento hasta de 10dB o más. A
continuación se mostrará la influencia del motor de la piscina en las detección de
las emabarcaciones.
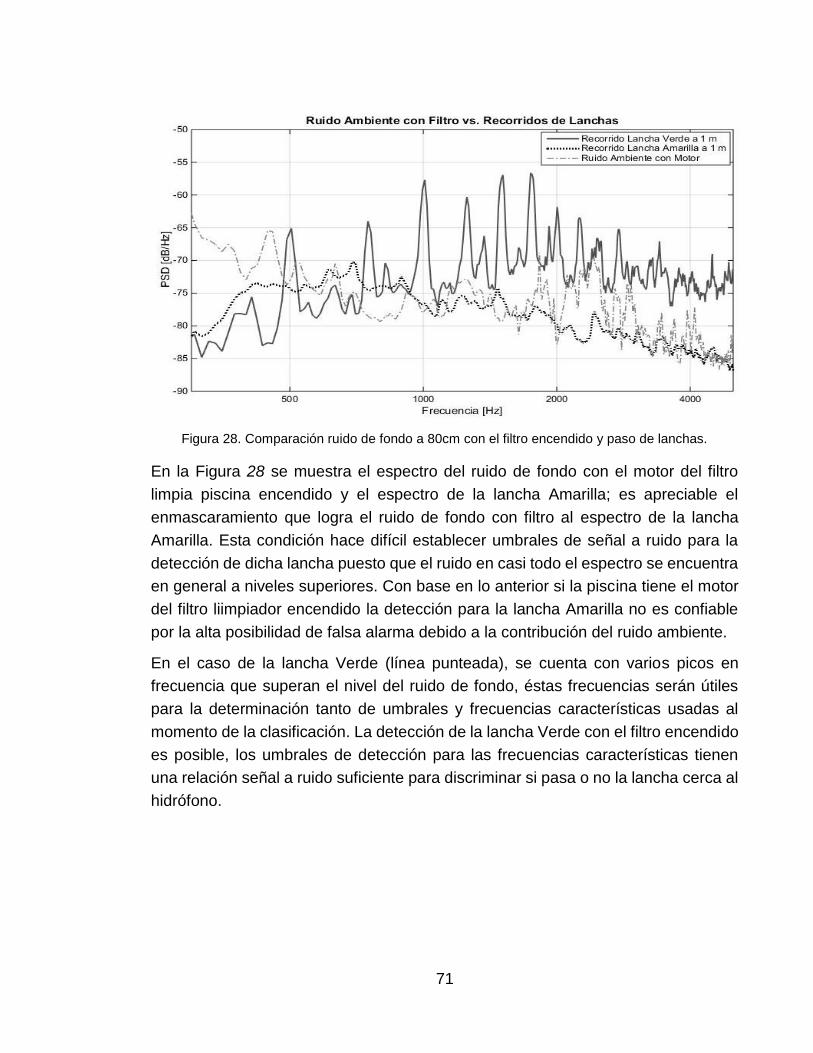
71
Figura 28. Comparación ruido de fondo a 80cm con el filtro encendido y paso de lanchas.
En la Figura 28 se muestra el espectro del ruido de fondo con el motor del filtro
limpia piscina encendido y el espectro de la lancha Amarilla; es apreciable el
enmascaramiento que logra el ruido de fondo con filtro al espectro de la lancha
Amarilla. Esta condición hace difícil establecer umbrales de señal a ruido para la
detección de dicha lancha puesto que el ruido en casi todo el espectro se encuentra
en general a niveles superiores. Con base en lo anterior si la piscina tiene el motor
del filtro liimpiador encendido la detección para la lancha Amarilla no es confiable
por la alta posibilidad de falsa alarma debido a la contribución del ruido ambiente.
En el caso de la lancha Verde (línea punteada), se cuenta con varios picos en
frecuencia que superan el nivel del ruido de fondo, éstas frecuencias serán útiles
para la determinación tanto de umbrales y frecuencias características usadas al
momento de la clasificación. La detección de la lancha Verde con el filtro encendido
es posible, los umbrales de detección para las frecuencias características tienen
una relación señal a ruido suficiente para discriminar si pasa o no la lancha cerca al
hidrófono.
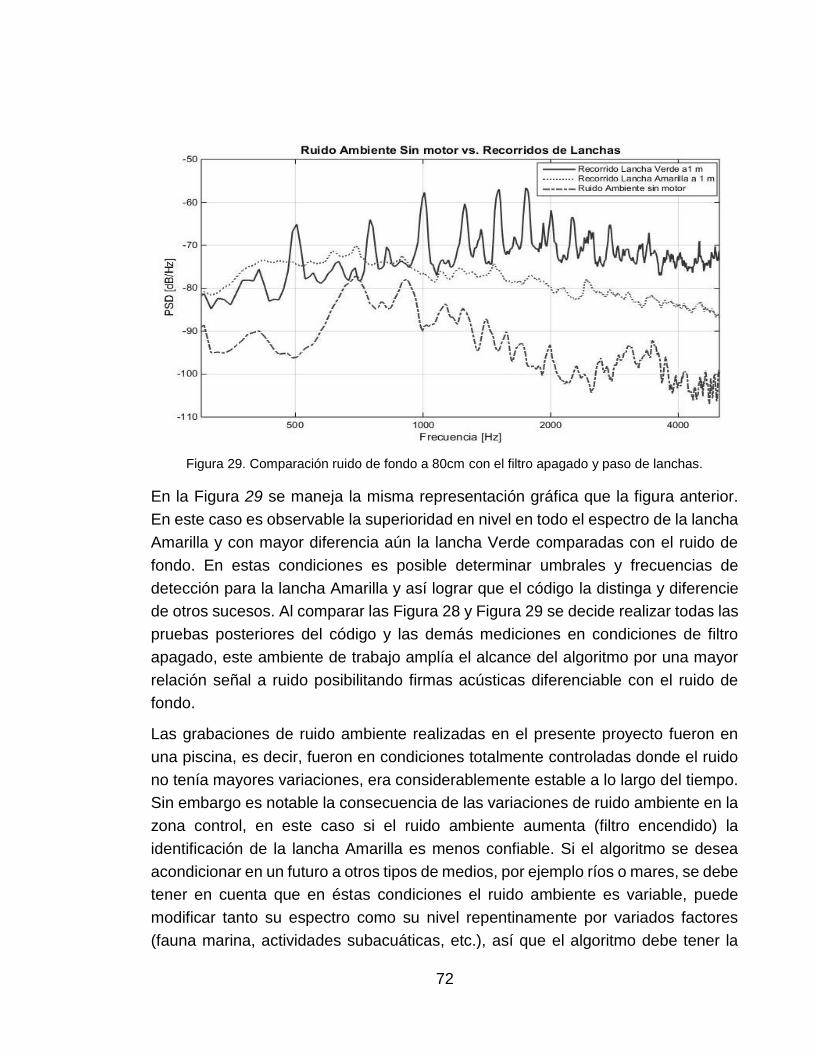
72
Figura 29. Comparación ruido de fondo a 80cm con el filtro apagado y paso de lanchas.
En la Figura 29 se maneja la misma representación gráfica que la figura anterior.
En este caso es observable la superioridad en nivel en todo el espectro de la lancha
Amarilla y con mayor diferencia aún la lancha Verde comparadas con el ruido de
fondo. En estas condiciones es posible determinar umbrales y frecuencias de
detección para la lancha Amarilla y así lograr que el código la distinga y diferencie
de otros sucesos. Al comparar las Figura 28 y Figura 29 se decide realizar todas las
pruebas posteriores del código y las demás mediciones en condiciones de filtro
apagado, este ambiente de trabajo amplía el alcance del algoritmo por una mayor
relación señal a ruido posibilitando firmas acústicas diferenciable con el ruido de
fondo.
Las grabaciones de ruido ambiente realizadas en el presente proyecto fueron en
una piscina, es decir, fueron en condiciones totalmente controladas donde el ruido
no tenía mayores variaciones, era considerablemente estable a lo largo del tiempo.
Sin embargo es notable la consecuencia de las variaciones de ruido ambiente en la
zona control, en este caso si el ruido ambiente aumenta (filtro encendido) la
identificación de la lancha Amarilla es menos confiable. Si el algoritmo se desea
acondicionar en un futuro a otros tipos de medios, por ejemplo ríos o mares, se debe
tener en cuenta que en éstas condiciones el ruido ambiente es variable, puede
modificar tanto su espectro como su nivel repentinamente por variados factores
(fauna marina, actividades subacuáticas, etc.), así que el algoritmo debe tener la
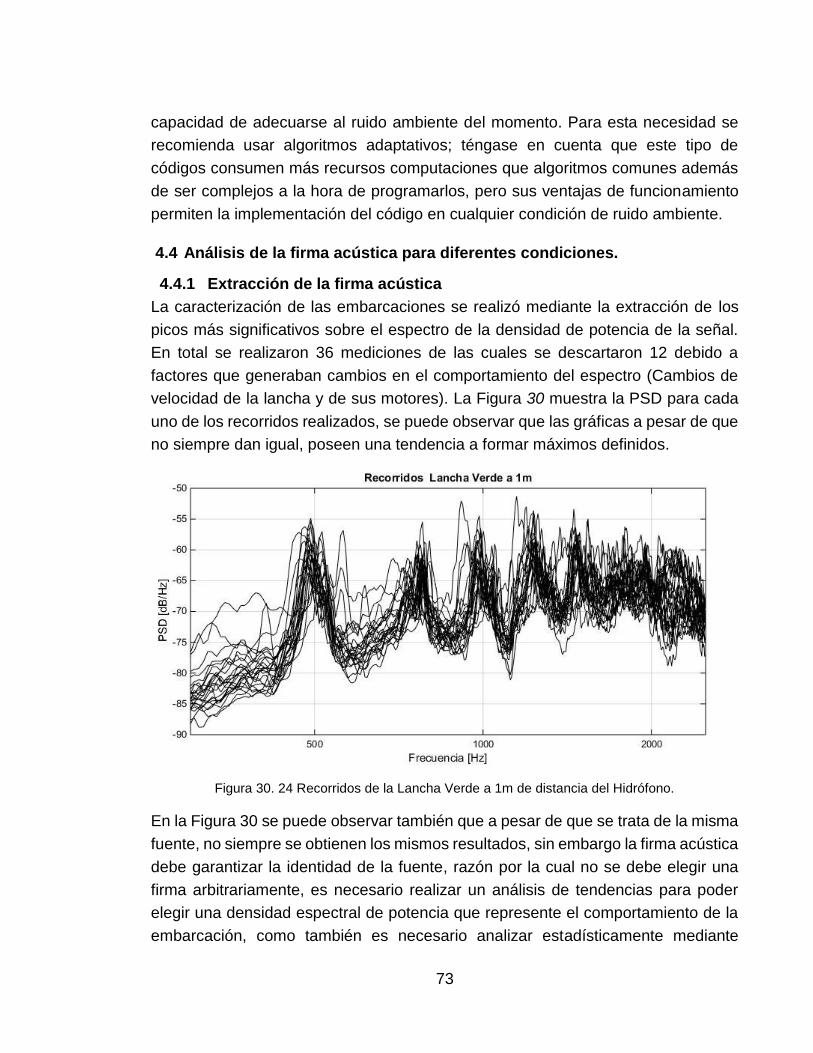
73
capacidad de adecuarse al ruido ambiente del momento. Para esta necesidad se
recomienda usar algoritmos adaptativos; téngase en cuenta que este tipo de
códigos consumen más recursos computaciones que algoritmos comunes además
de ser complejos a la hora de programarlos, pero sus ventajas de funcionamiento
permiten la implementación del código en cualquier condición de ruido ambiente.
4.4 Análisis de la firma acústica para diferentes condiciones.
4.4.1 Extracción de la firma acústica
La caracterización de las embarcaciones se realizó mediante la extracción de los
picos más significativos sobre el espectro de la densidad de potencia de la señal.
En total se realizaron 36 mediciones de las cuales se descartaron 12 debido a
factores que generaban cambios en el comportamiento del espectro (Cambios de
velocidad de la lancha y de sus motores). La Figura 30 muestra la PSD para cada
uno de los recorridos realizados, se puede observar que las gráficas a pesar de que
no siempre dan igual, poseen una tendencia a formar máximos definidos.
Figura 30. 24 Recorridos de la Lancha Verde a 1m de distancia del Hidrófono.
En la Figura 30 se puede observar también que a pesar de que se trata de la misma
fuente, no siempre se obtienen los mismos resultados, sin embargo la firma acústica
debe garantizar la identidad de la fuente, razón por la cual no se debe elegir una
firma arbitrariamente, es necesario realizar un análisis de tendencias para poder
elegir una densidad espectral de potencia que represente el comportamiento de la
embarcación, como también es necesario analizar estadísticamente mediante
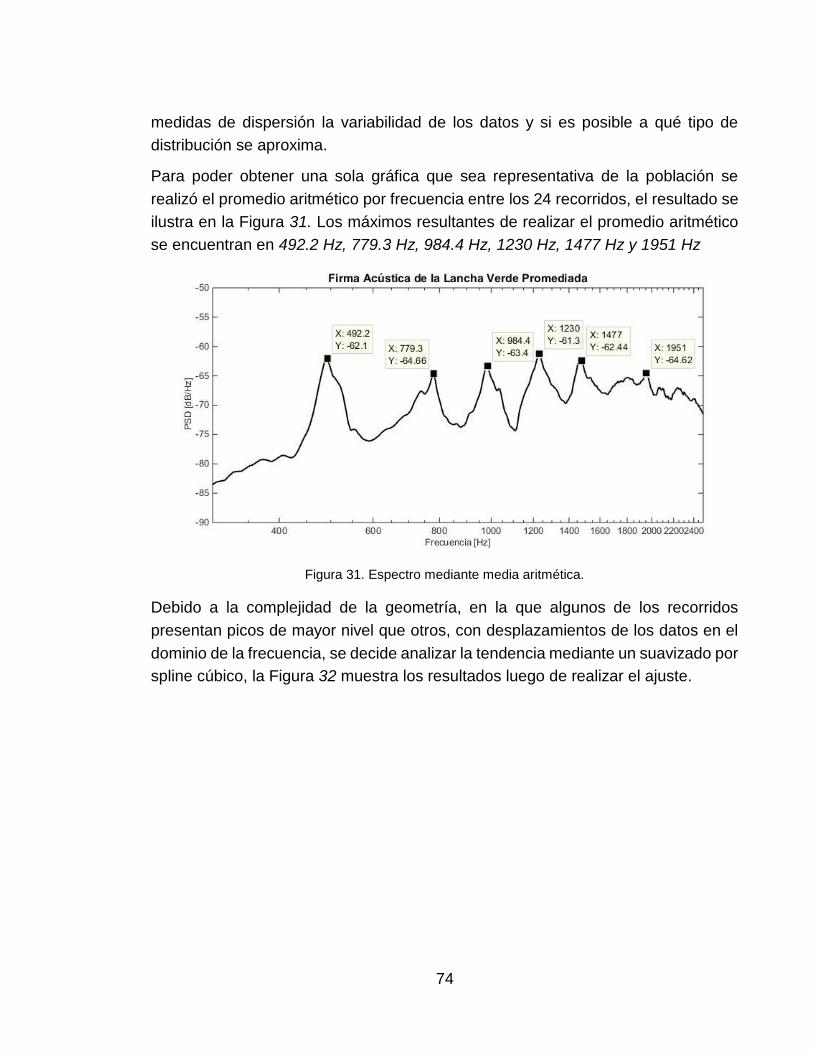
74
medidas de dispersión la variabilidad de los datos y si es posible a qué tipo de
distribución se aproxima.
Para poder obtener una sola gráfica que sea representativa de la población se
realizó el promedio aritmético por frecuencia entre los 24 recorridos, el resultado se
ilustra en la Figura 31. Los máximos resultantes de realizar el promedio aritmético
se encuentran en 492.2 Hz, 779.3 Hz, 984.4 Hz, 1230 Hz, 1477 Hz y 1951 Hz
Figura 31. Espectro mediante media aritmética.
Debido a la complejidad de la geometría, en la que algunos de los recorridos
presentan picos de mayor nivel que otros, con desplazamientos de los datos en el
dominio de la frecuencia, se decide analizar la tendencia mediante un suavizado por
spline cúbico, la Figura 32 muestra los resultados luego de realizar el ajuste.
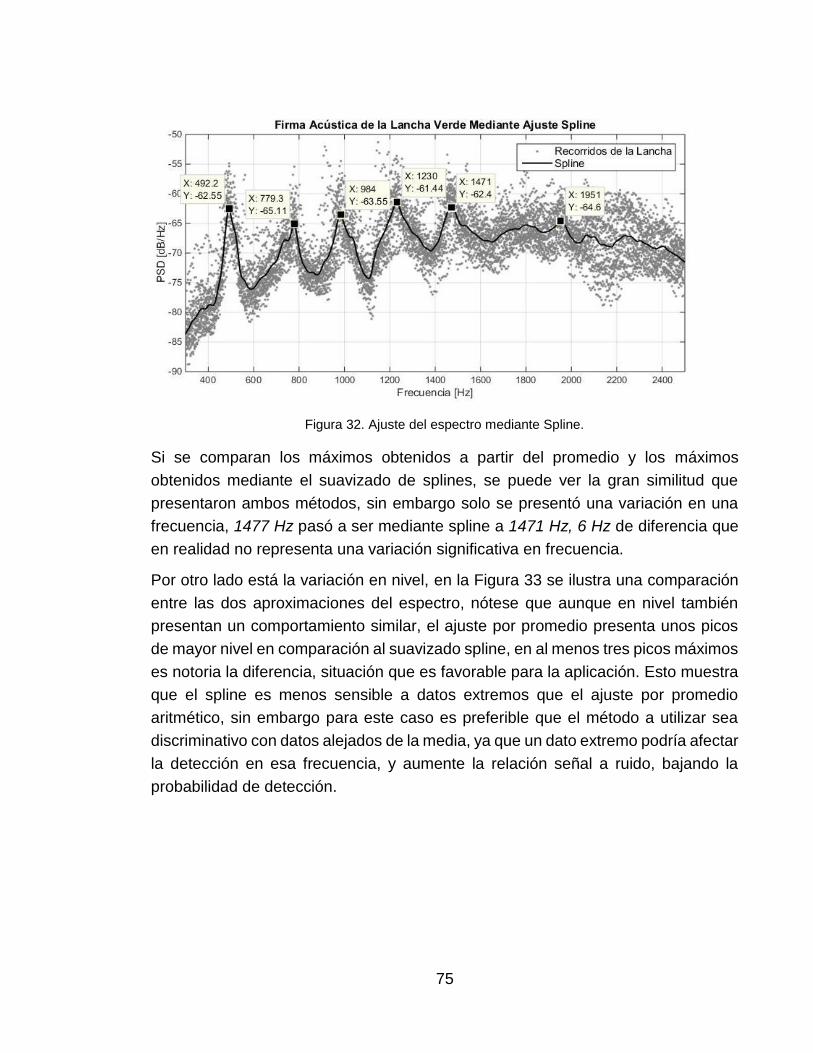
75
Figura 32. Ajuste del espectro mediante Spline.
Si se comparan los máximos obtenidos a partir del promedio y los máximos
obtenidos mediante el suavizado de splines, se puede ver la gran similitud que
presentaron ambos métodos, sin embargo solo se presentó una variación en una
frecuencia, 1477 Hz pasó a ser mediante spline a 1471 Hz, 6 Hz de diferencia que
en realidad no representa una variación significativa en frecuencia.
Por otro lado está la variación en nivel, en la Figura 33 se ilustra una comparación
entre las dos aproximaciones del espectro, nótese que aunque en nivel también
presentan un comportamiento similar, el ajuste por promedio presenta unos picos
de mayor nivel en comparación al suavizado spline, en al menos tres picos máximos
es notoria la diferencia, situación que es favorable para la aplicación. Esto muestra
que el spline es menos sensible a datos extremos que el ajuste por promedio
aritmético, sin embargo para este caso es preferible que el método a utilizar sea
discriminativo con datos alejados de la media, ya que un dato extremo podría afectar
la detección en esa frecuencia, y aumente la relación señal a ruido, bajando la
probabilidad de detección.
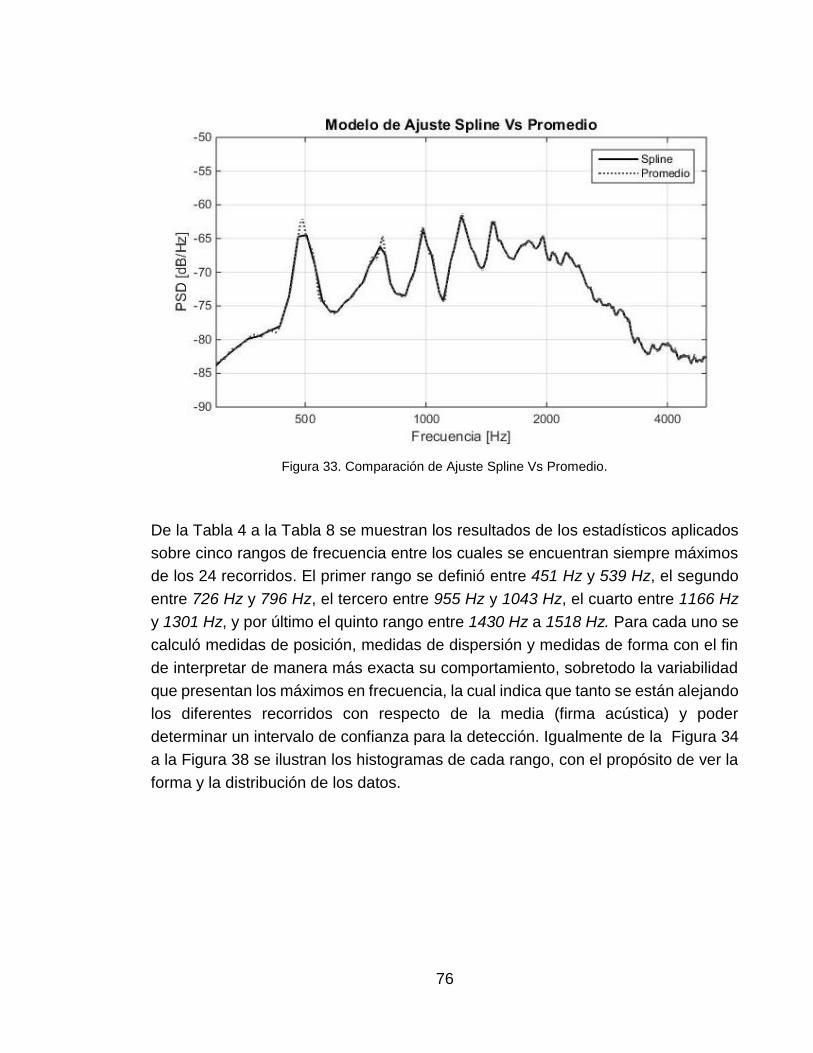
76
Figura 33. Comparación de Ajuste Spline Vs Promedio.
De la Tabla 4 a la Tabla 8 se muestran los resultados de los estadísticos aplicados
sobre cinco rangos de frecuencia entre los cuales se encuentran siempre máximos
de los 24 recorridos. El primer rango se definió entre 451 Hz y 539 Hz, el segundo
entre 726 Hz y 796 Hz, el tercero entre 955 Hz y 1043 Hz, el cuarto entre 1166 Hz
y 1301 Hz, y por último el quinto rango entre 1430 Hz a 1518 Hz. Para cada uno se
calculó medidas de posición, medidas de dispersión y medidas de forma con el fin
de interpretar de manera más exacta su comportamiento, sobretodo la variabilidad
que presentan los máximos en frecuencia, la cual indica que tanto se están alejando
los diferentes recorridos con respecto de la media (firma acústica) y poder
determinar un intervalo de confianza para la detección. Igualmente de la Figura 34
a la Figura 38 se ilustran los histogramas de cada rango, con el propósito de ver la
forma y la distribución de los datos.
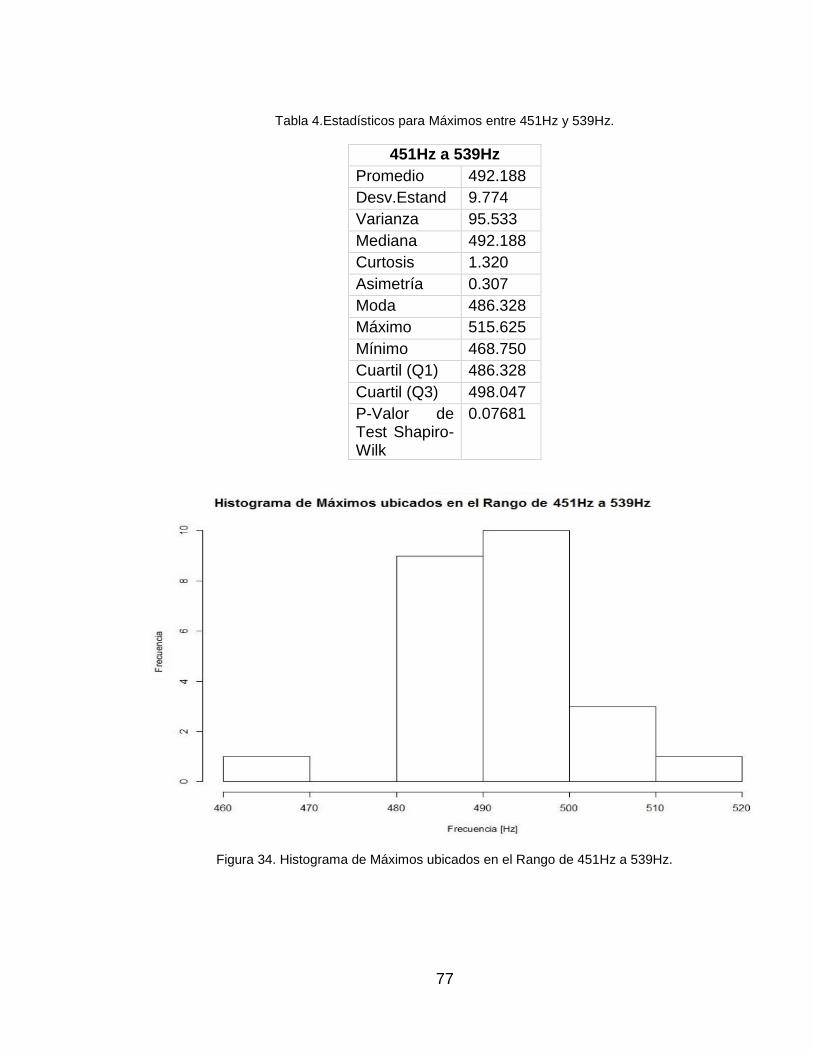
77
Tabla 4.Estadísticos para Máximos entre 451Hz y 539Hz.
Figura 34. Histograma de Máximos ubicados en el Rango de 451Hz a 539Hz.
451Hz a 539Hz
Promedio 492.188
Desv.Estand 9.774
Varianza 95.533
Mediana 492.188
Curtosis 1.320
Asimetría 0.307
Moda 486.328
Máximo 515.625
Mínimo 468.750
Cuartil (Q1) 486.328
Cuartil (Q3) 498.047
P-Valor de Test Shapiro-Wilk
0.07681
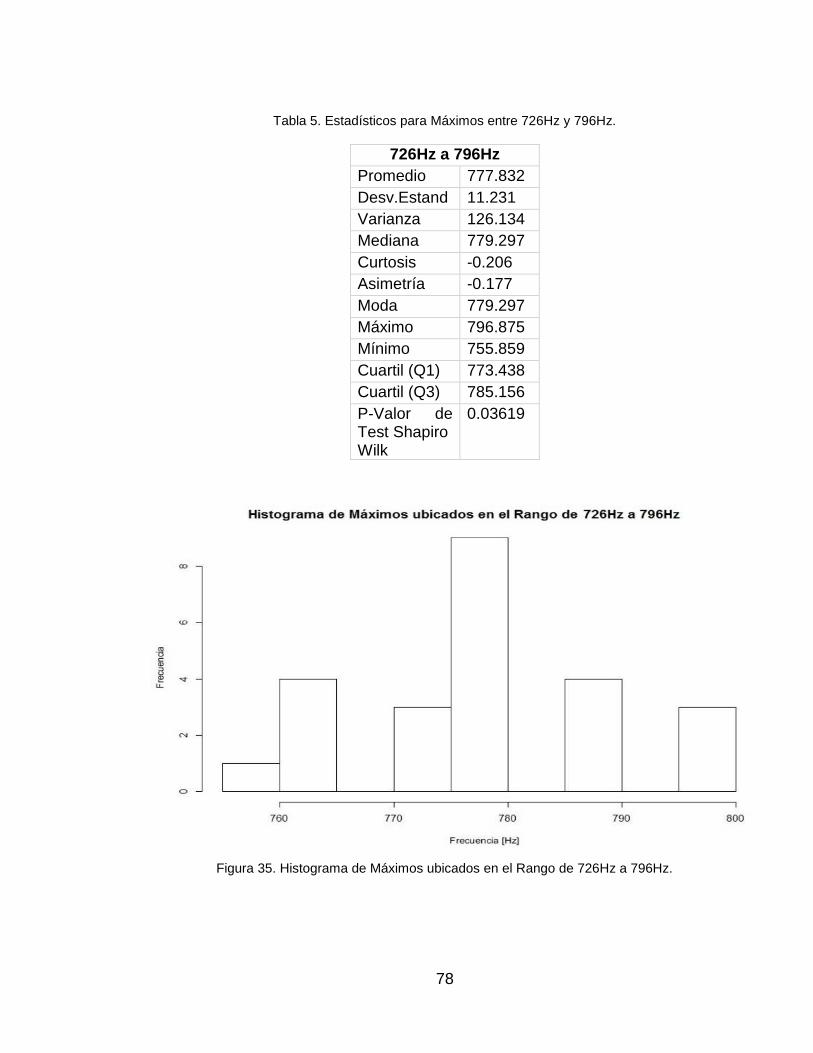
78
Tabla 5. Estadísticos para Máximos entre 726Hz y 796Hz.
726Hz a 796Hz
Promedio 777.832
Desv.Estand 11.231
Varianza 126.134
Mediana 779.297
Curtosis -0.206
Asimetría -0.177
Moda 779.297
Máximo 796.875
Mínimo 755.859
Cuartil (Q1) 773.438
Cuartil (Q3) 785.156
P-Valor de Test Shapiro Wilk
0.03619
Figura 35. Histograma de Máximos ubicados en el Rango de 726Hz a 796Hz.
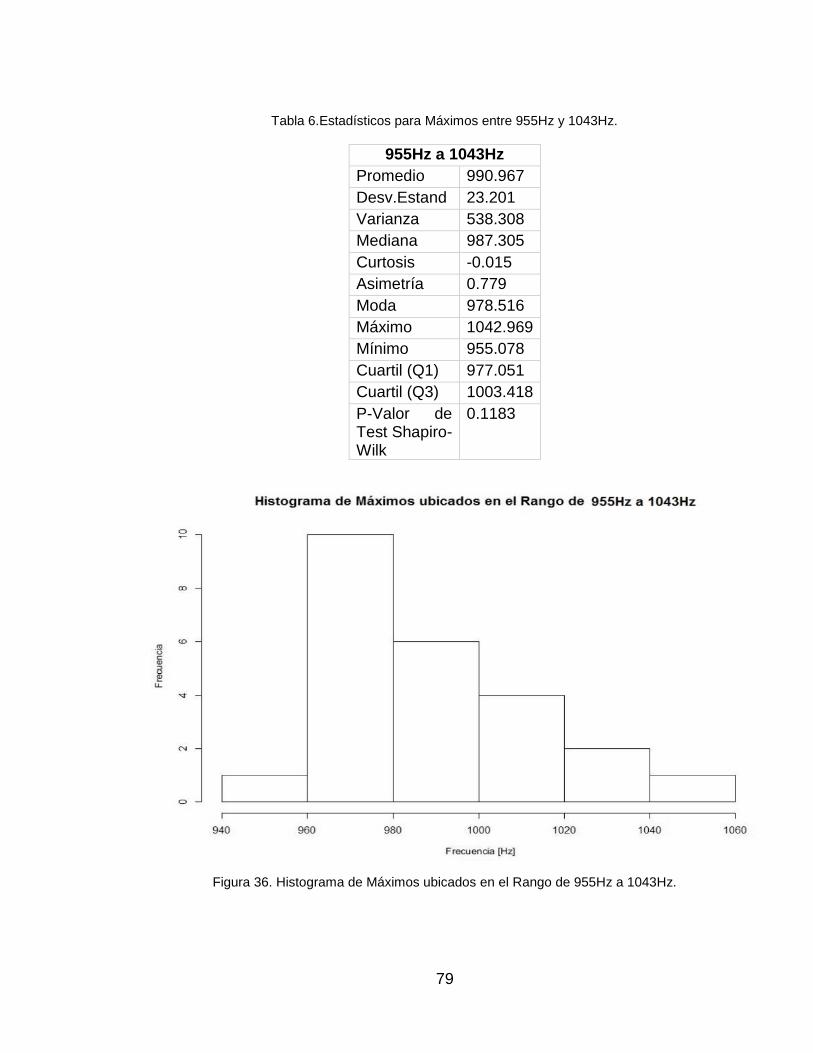
79
Tabla 6.Estadísticos para Máximos entre 955Hz y 1043Hz.
955Hz a 1043Hz
Promedio 990.967
Desv.Estand 23.201
Varianza 538.308
Mediana 987.305
Curtosis -0.015
Asimetría 0.779
Moda 978.516
Máximo 1042.969
Mínimo 955.078
Cuartil (Q1) 977.051
Cuartil (Q3) 1003.418
P-Valor de Test Shapiro-Wilk
0.1183
Figura 36. Histograma de Máximos ubicados en el Rango de 955Hz a 1043Hz.
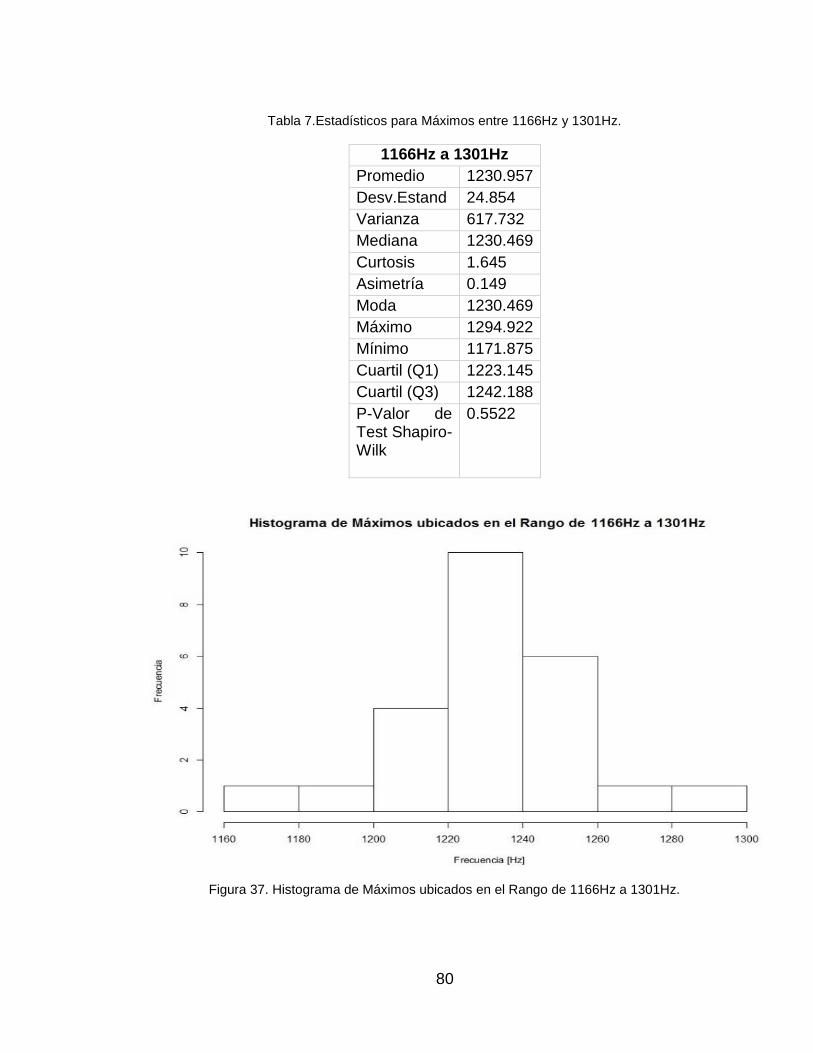
80
Tabla 7.Estadísticos para Máximos entre 1166Hz y 1301Hz.
1166Hz a 1301Hz
Promedio 1230.957
Desv.Estand 24.854
Varianza 617.732
Mediana 1230.469
Curtosis 1.645
Asimetría 0.149
Moda 1230.469
Máximo 1294.922
Mínimo 1171.875
Cuartil (Q1) 1223.145
Cuartil (Q3) 1242.188
P-Valor de Test Shapiro-Wilk
0.5522
Figura 37. Histograma de Máximos ubicados en el Rango de 1166Hz a 1301Hz.
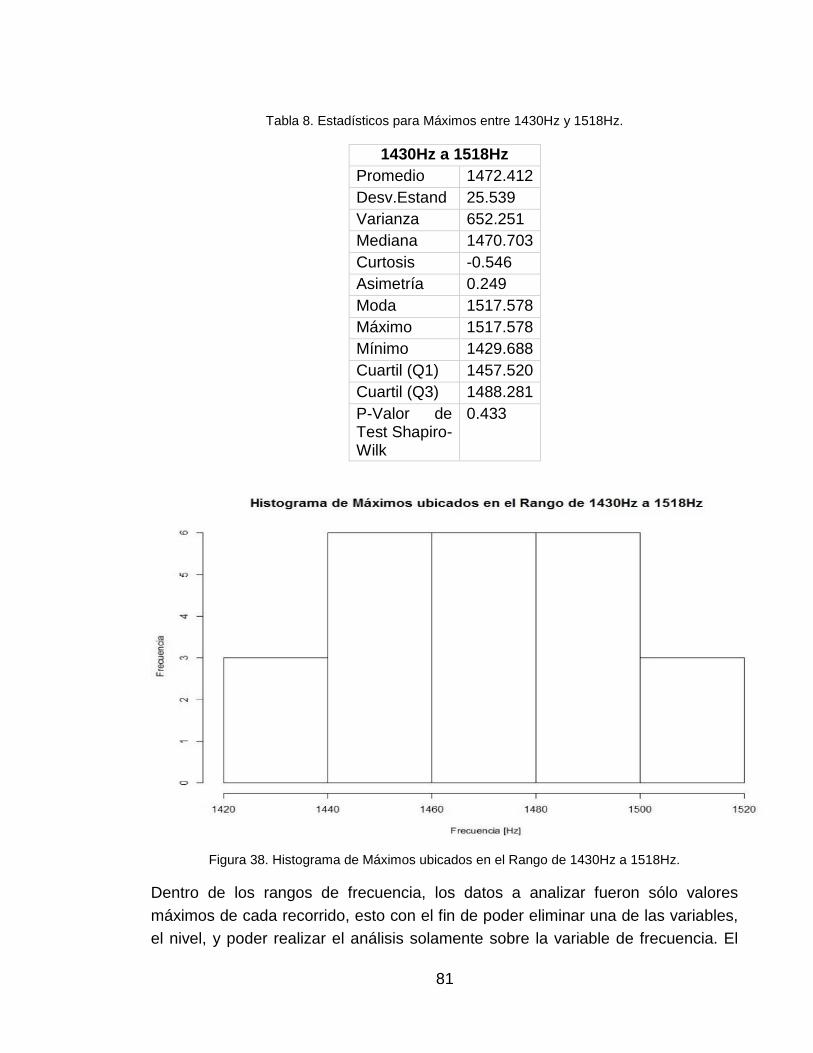
81
Tabla 8. Estadísticos para Máximos entre 1430Hz y 1518Hz.
1430Hz a 1518Hz
Promedio 1472.412
Desv.Estand 25.539
Varianza 652.251
Mediana 1470.703
Curtosis -0.546
Asimetría 0.249
Moda 1517.578
Máximo 1517.578
Mínimo 1429.688
Cuartil (Q1) 1457.520
Cuartil (Q3) 1488.281
P-Valor de Test Shapiro-Wilk
0.433
Figura 38. Histograma de Máximos ubicados en el Rango de 1430Hz a 1518Hz.
Dentro de los rangos de frecuencia, los datos a analizar fueron sólo valores
máximos de cada recorrido, esto con el fin de poder eliminar una de las variables,
el nivel, y poder realizar el análisis solamente sobre la variable de frecuencia. El
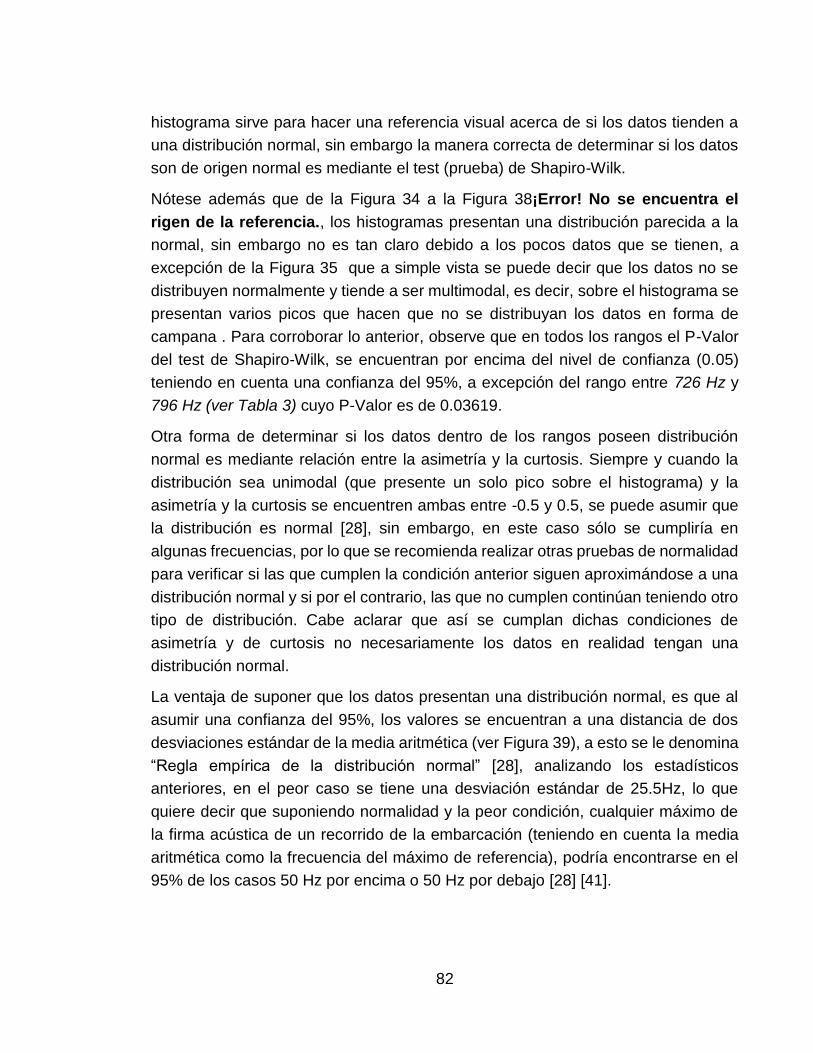
82
histograma sirve para hacer una referencia visual acerca de si los datos tienden a
una distribución normal, sin embargo la manera correcta de determinar si los datos
son de origen normal es mediante el test (prueba) de Shapiro-Wilk.
Nótese además que de la Figura 34 a la Figura 38¡Error! No se encuentra el
rigen de la referencia., los histogramas presentan una distribución parecida a la
normal, sin embargo no es tan claro debido a los pocos datos que se tienen, a
excepción de la Figura 35 que a simple vista se puede decir que los datos no se
distribuyen normalmente y tiende a ser multimodal, es decir, sobre el histograma se
presentan varios picos que hacen que no se distribuyan los datos en forma de
campana . Para corroborar lo anterior, observe que en todos los rangos el P-Valor
del test de Shapiro-Wilk, se encuentran por encima del nivel de confianza (0.05)
teniendo en cuenta una confianza del 95%, a excepción del rango entre 726 Hz y
796 Hz (ver Tabla 3) cuyo P-Valor es de 0.03619.
Otra forma de determinar si los datos dentro de los rangos poseen distribución
normal es mediante relación entre la asimetría y la curtosis. Siempre y cuando la
distribución sea unimodal (que presente un solo pico sobre el histograma) y la
asimetría y la curtosis se encuentren ambas entre -0.5 y 0.5, se puede asumir que
la distribución es normal [28], sin embargo, en este caso sólo se cumpliría en
algunas frecuencias, por lo que se recomienda realizar otras pruebas de normalidad
para verificar si las que cumplen la condición anterior siguen aproximándose a una
distribución normal y si por el contrario, las que no cumplen continúan teniendo otro
tipo de distribución. Cabe aclarar que así se cumplan dichas condiciones de
asimetría y de curtosis no necesariamente los datos en realidad tengan una
distribución normal.
La ventaja de suponer que los datos presentan una distribución normal, es que al
asumir una confianza del 95%, los valores se encuentran a una distancia de dos
desviaciones estándar de la media aritmética (ver Figura 39), a esto se le denomina
“Regla empírica de la distribución normal” [28], analizando los estadísticos
anteriores, en el peor caso se tiene una desviación estándar de 25.5Hz, lo que
quiere decir que suponiendo normalidad y la peor condición, cualquier máximo de
la firma acústica de un recorrido de la embarcación (teniendo en cuenta la media
aritmética como la frecuencia del máximo de referencia), podría encontrarse en el
95% de los casos 50 Hz por encima o 50 Hz por debajo [28] [41].
83
Figura 39. Regla empírica de la distribución Normal.
Teniendo en cuenta esta regla, dentro del algoritmo se diseña un filtro pasa banda
para extraer un valor máximo sobre la señal. El ancho de banda del filtro va a
corresponder, para esta embarcación, a cuatro desviaciones estándar, es decir
aproximadamente 100 Hz para el peor de los casos de las frecuencias
anteriormente analizadas, sin embargo el algoritmo debe extraer los máximos de la
señal en todo el dominio de la frecuencia, o por lo menos en el rango de utilidad de
la firma acústica, en este caso de 300Hz hasta 2050Hz (ver Figura 40) , por lo que
es necesario implementar un banco de filtros, estos consisten en filtrar la señal
realizando un “paso a paso” en frecuencia, este paso determinará cuantos máximos
se van a extraer de la firma acústica y se debe elegir teniendo en cuenta dos
condiciones, que tan cercanos se encuentren los picos máximos de la señal uno de
otros y el tiempo de procesamiento del algoritmo. En este proyecto se determinó un
paso de 100Hz, es decir, el filtro se moverá en frecuencia cada 100Hz filtrando así
la señal en un rango determinado.
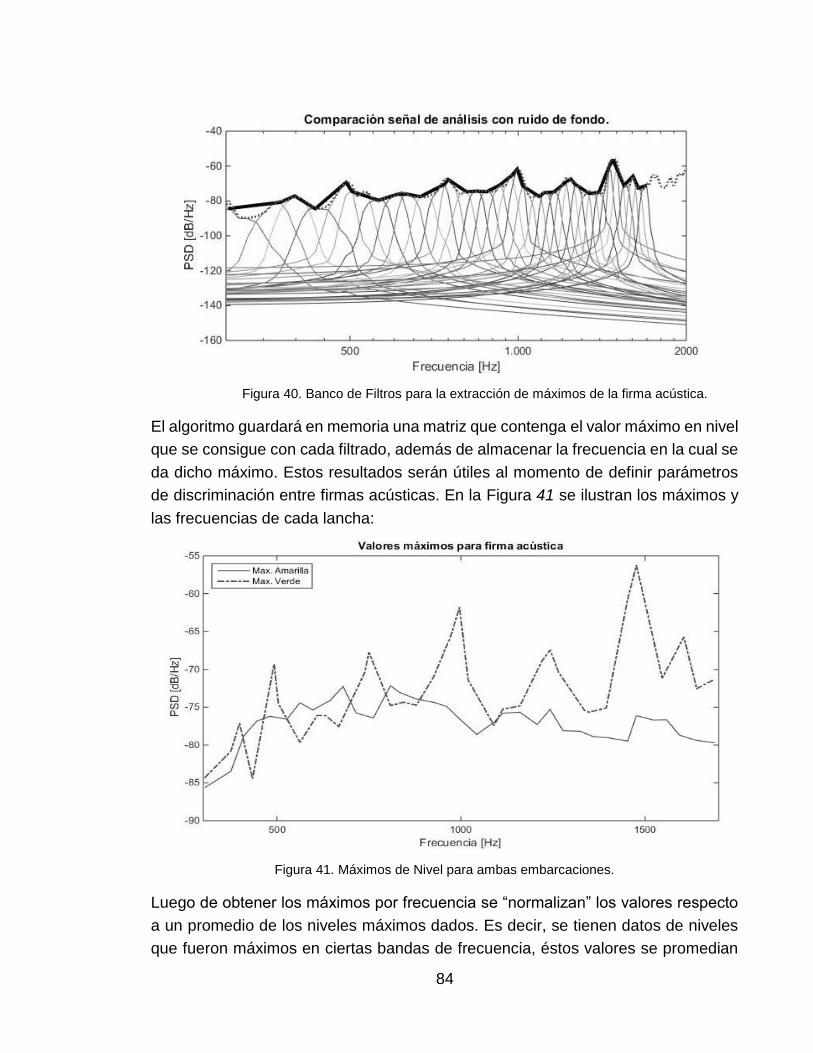
84
Figura 40. Banco de Filtros para la extracción de máximos de la firma acústica.
El algoritmo guardará en memoria una matriz que contenga el valor máximo en nivel
que se consigue con cada filtrado, además de almacenar la frecuencia en la cual se
da dicho máximo. Estos resultados serán útiles al momento de definir parámetros
de discriminación entre firmas acústicas. En la Figura 41 se ilustran los máximos y
las frecuencias de cada lancha:
Figura 41. Máximos de Nivel para ambas embarcaciones.
Luego de obtener los máximos por frecuencia se “normalizan” los valores respecto
a un promedio de los niveles máximos dados. Es decir, se tienen datos de niveles
que fueron máximos en ciertas bandas de frecuencia, éstos valores se promedian
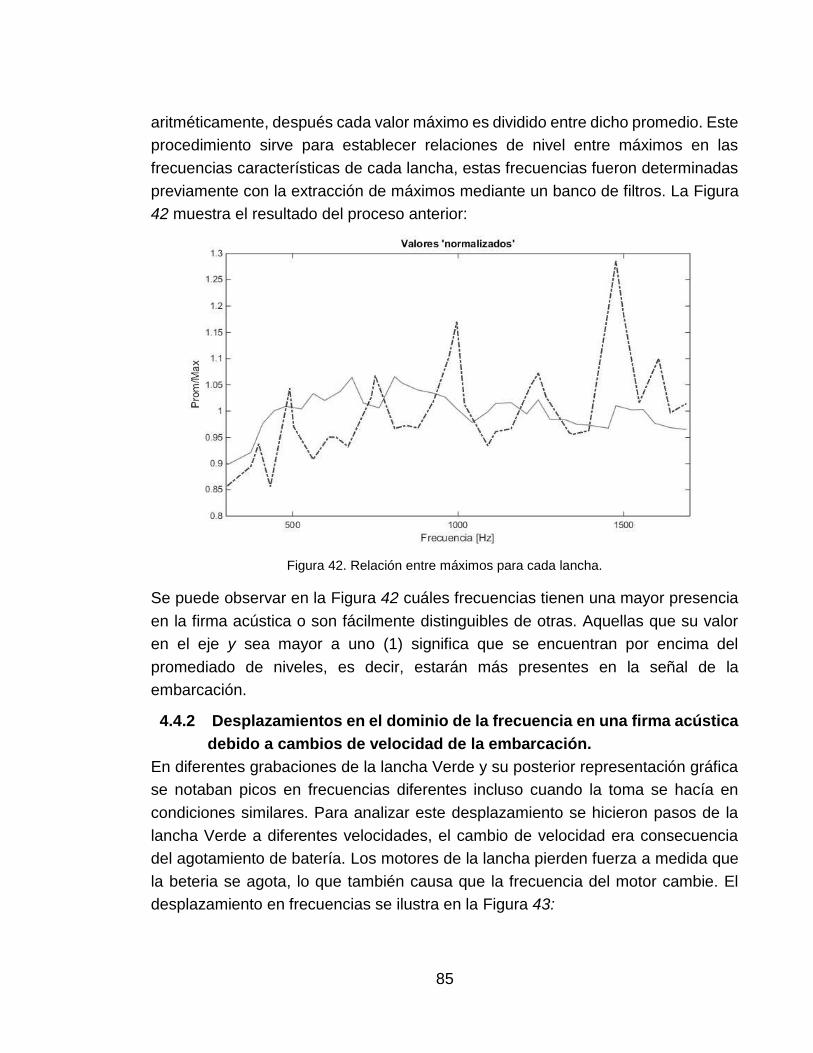
85
aritméticamente, después cada valor máximo es dividido entre dicho promedio. Este
procedimiento sirve para establecer relaciones de nivel entre máximos en las
frecuencias características de cada lancha, estas frecuencias fueron determinadas
previamente con la extracción de máximos mediante un banco de filtros. La Figura
42 muestra el resultado del proceso anterior:
Figura 42. Relación entre máximos para cada lancha.
Se puede observar en la Figura 42 cuáles frecuencias tienen una mayor presencia
en la firma acústica o son fácilmente distinguibles de otras. Aquellas que su valor
en el eje y sea mayor a uno (1) significa que se encuentran por encima del
promediado de niveles, es decir, estarán más presentes en la señal de la
embarcación.
4.4.2 Desplazamientos en el dominio de la frecuencia en una firma acústica
debido a cambios de velocidad de la embarcación.
En diferentes grabaciones de la lancha Verde y su posterior representación gráfica
se notaban picos en frecuencias diferentes incluso cuando la toma se hacía en
condiciones similares. Para analizar este desplazamiento se hicieron pasos de la
lancha Verde a diferentes velocidades, el cambio de velocidad era consecuencia
del agotamiento de batería. Los motores de la lancha pierden fuerza a medida que
la beteria se agota, lo que también causa que la frecuencia del motor cambie. El
desplazamiento en frecuencias se ilustra en la Figura 43:
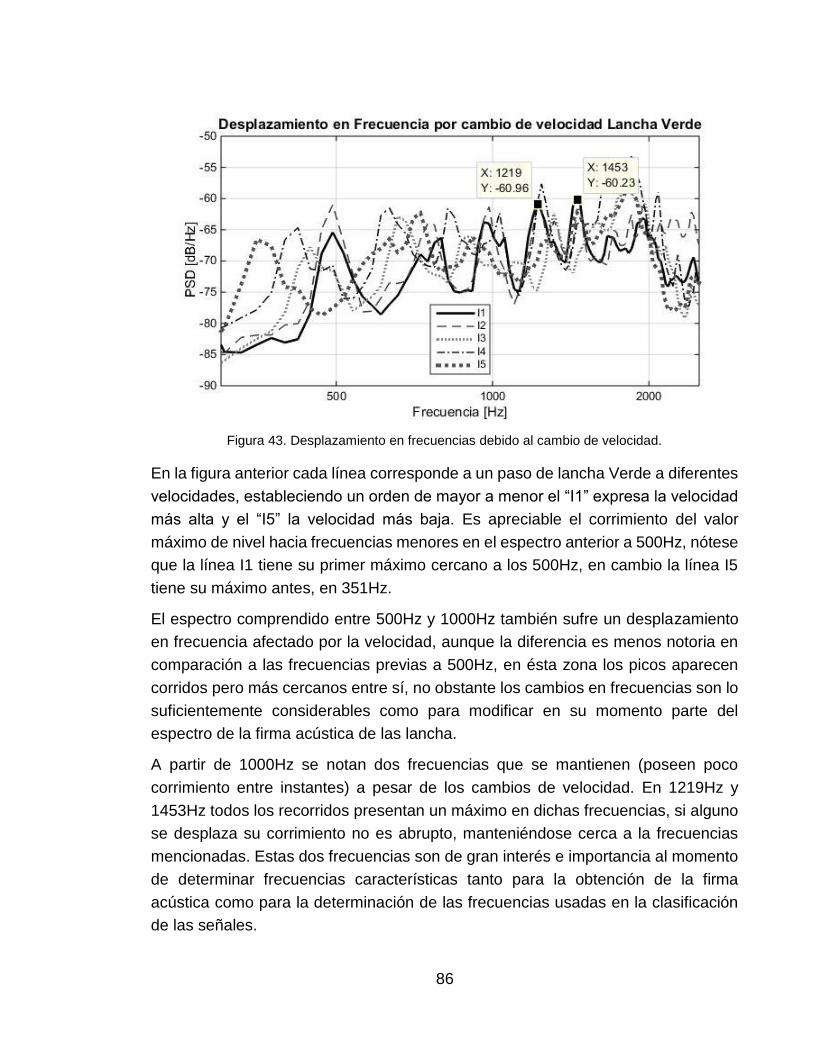
86
Figura 43. Desplazamiento en frecuencias debido al cambio de velocidad.
En la figura anterior cada línea corresponde a un paso de lancha Verde a diferentes
velocidades, estableciendo un orden de mayor a menor el “I1” expresa la velocidad
más alta y el “I5” la velocidad más baja. Es apreciable el corrimiento del valor
máximo de nivel hacia frecuencias menores en el espectro anterior a 500Hz, nótese
que la línea I1 tiene su primer máximo cercano a los 500Hz, en cambio la línea I5
tiene su máximo antes, en 351Hz.
El espectro comprendido entre 500Hz y 1000Hz también sufre un desplazamiento
en frecuencia afectado por la velocidad, aunque la diferencia es menos notoria en
comparación a las frecuencias previas a 500Hz, en ésta zona los picos aparecen
corridos pero más cercanos entre sí, no obstante los cambios en frecuencias son lo
suficientemente considerables como para modificar en su momento parte del
espectro de la firma acústica de las lancha.
A partir de 1000Hz se notan dos frecuencias que se mantienen (poseen poco
corrimiento entre instantes) a pesar de los cambios de velocidad. En 1219Hz y
1453Hz todos los recorridos presentan un máximo en dichas frecuencias, si alguno
se desplaza su corrimiento no es abrupto, manteniéndose cerca a la frecuencias
mencionadas. Estas dos frecuencias son de gran interés e importancia al momento
de determinar frecuencias características tanto para la obtención de la firma
acústica como para la determinación de las frecuencias usadas en la clasificación
de las señales.
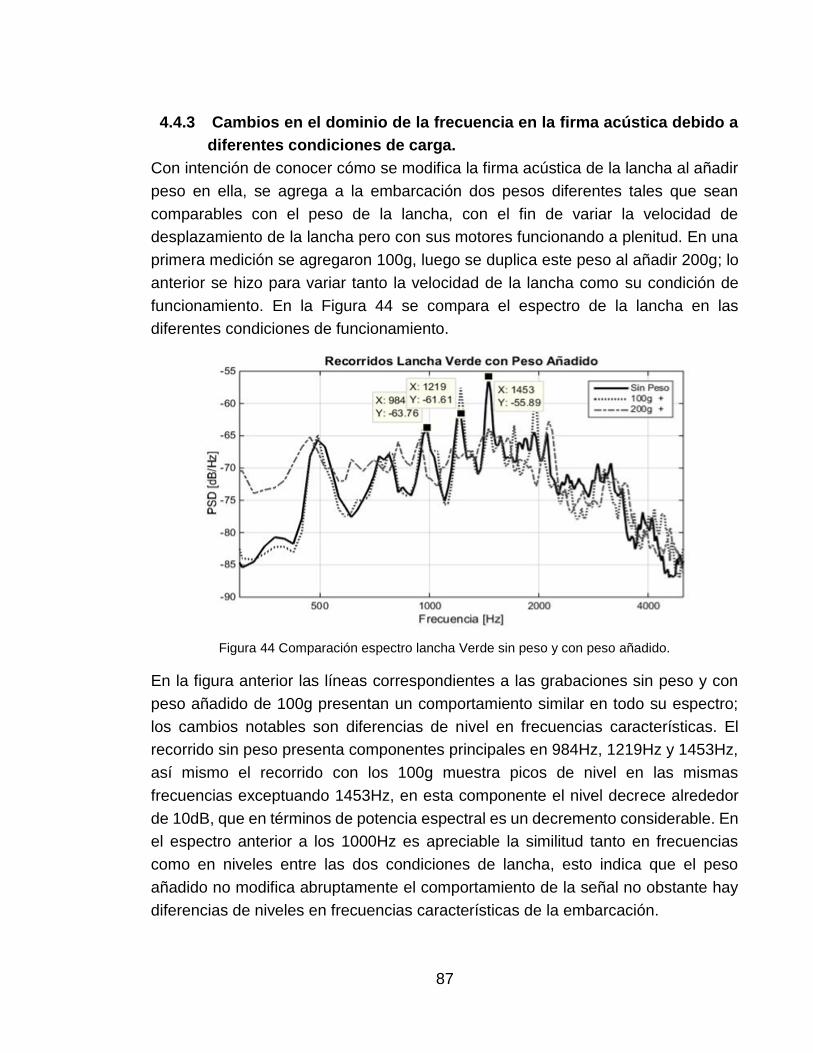
87
4.4.3 Cambios en el dominio de la frecuencia en la firma acústica debido a
diferentes condiciones de carga.
Con intención de conocer cómo se modifica la firma acústica de la lancha al añadir
peso en ella, se agrega a la embarcación dos pesos diferentes tales que sean
comparables con el peso de la lancha, con el fin de variar la velocidad de
desplazamiento de la lancha pero con sus motores funcionando a plenitud. En una
primera medición se agregaron 100g, luego se duplica este peso al añadir 200g; lo
anterior se hizo para variar tanto la velocidad de la lancha como su condición de
funcionamiento. En la Figura 44 se compara el espectro de la lancha en las
diferentes condiciones de funcionamiento.
Figura 44 Comparación espectro lancha Verde sin peso y con peso añadido.
En la figura anterior las líneas correspondientes a las grabaciones sin peso y con
peso añadido de 100g presentan un comportamiento similar en todo su espectro;
los cambios notables son diferencias de nivel en frecuencias características. El
recorrido sin peso presenta componentes principales en 984Hz, 1219Hz y 1453Hz,
así mismo el recorrido con los 100g muestra picos de nivel en las mismas
frecuencias exceptuando 1453Hz, en esta componente el nivel decrece alrededor
de 10dB, que en términos de potencia espectral es un decremento considerable. En
el espectro anterior a los 1000Hz es apreciable la similitud tanto en frecuencias
como en niveles entre las dos condiciones de lancha, esto indica que el peso
añadido no modifica abruptamente el comportamiento de la señal no obstante hay
diferencias de niveles en frecuencias características de la embarcación.
88
La Figura 44 también compara el paso de lancha sin peso contra un peso añadido
de 200 g. Esta condición de trabajo sí tuvo como consecuencia un comportamiento
distinto en el funcionamiento de la embarcación, en lo que corresponde al recorrido
con 200g de más, donde el espectro cambia notoriamente. El espectro anterior a
1000Hz presenta un incremento general en nivel, esto corresponde al peso añadido
el cual provoca que los motores de la lancha tengan menos contacto con la
superficie del agua manteniéndose mayor parte del tiempo sumergidos, esta
condición aumenta la aireación producida por las hélices de los motores la cual se
ve reflejada en aumento de las frecuencias bajas. En al rango de 1000Hz a 2000Hz
no se presentan picos característicos en la señal del peso añadido. A partir de los
2000Hz aparece un pico similar a otro máximo en el recorrido sin peso, luego de
éste las frecuencias más altas comienzan a decaer similar a las otras dos
condiciones.
Con base en lo dicho, se puede afirmar que existe cierta cantidad de peso añadido
que no modifica en gran medida el comportamiento de la señal, sin embargo este
va variando a medida que el peso añadido aumenta. El cambio afecta
principalmente las bajas frecuencias (anteriores a 1000Hz), además se observa que
a altas frecuencias (superiores a 2000Hz) el comportamiento es semejante. Con
estas consideraciones se podría estimar a futuro qué tan cargada va una lancha
que previamente fue grabada, teniendo definidas las frecuencias que más se
afectan con el peso y cómo varían en comparación a la lancha vacía.
4.5 Determinación de los umbrales de detección mediante la ecuación de
Sonar Pasivo
4.5.1 Umbrales de detección.
La firma acústica de la lancha contiene información de interés en el rango de los
300Hz a 5 kHz. Para determinar los picos máximos de la señal dentro de este rango
es necesario dividir el espectro linealmente en pequeños intervalos de frecuencia
(100Hz de ancho de banda), este ancho de banda es suficiente para discriminar
máximos que se encuentren cerca uno de otro. Se realiza de esta manera porque
al implementar filtros por tercios de octava a frecuencias altas el ancho de banda de
los filtros se hace más amplio, lo cual no es un escenario conveniente ya que la
firma acústica podría contener varios picos máximos dentro de la misma banda de
tercio de octava.
Al dividir el espectro de forma lineal el ancho de banda corresponde a la diferencia
entre 𝑓1 𝑦 𝑓2 (𝑓1 < 𝑓2) de un filtro pasa-banda Butterworth de orden 10, dicho filtro se
89
aplica de forma iterativa recorriendo todo el espectro, es decir, luego del primer
filtrado la 𝑓1 = 𝑓2 y 𝑓2 = 𝑓2 + 100𝐻𝑧, y así hasta cubrir el rango de interés. Una vez
aplicado el filtro se calcula la PSD de la señal filtrada. El cálculo de la densidad
espectral de potencia se realiza de forma no paramétrica mediante el método del
promediado de periodogramas modificados (método de Welch). Como resultado se
obtiene un vector de valores máximos de potencia en función de la frecuencia, las
cuales representan las componentes espectrales más significativas de la señal.
Una vez determinados los valores representativos de la firma acústica de la lancha,
se vuelve a aplicar varios filtros pasa-banda tipo Butterworth tanto a la señal de la
lancha como al ruido ambiente, pero esta vez más restrictivos (Ancho de banda
según el paso mínimo del vector frecuencia al aplicar Pwelch), donde la frecuencia
central de los filtros en ambas señales son las frecuencias donde se encontró un
máximo de potencia.
Se calcula la diferencia entre el nivel máximo de cada frecuencia representativa
correspondiente a la señal y la misma frecuencia en el ruido de fondo mediante la
ecuación de sonar pasivo, este resultado servirá como umbral de detección al
momento de implementar el algoritmo para la clasificación. La determinación de
umbrales se realiza por medio de la ecuación de sonar pasivo, donde el hidrófono
se encarga de capturar el nivel emitido por la fuente y la pérdida por transmisión.
Los demás parámetros son calculados en el código.
El algoritmo de clasificación realiza el filtrado restrictivo a la señal grabada en tiempo
real, y compara los niveles hallados con el vector de diferencias de nivel. Si el nivel
recién hallado es igual o superior al umbral calculado anteriormente entonces el
algoritmo mostrará “detección”. La determinación de umbrales de detección que
realiza el código se hace de la siguiente manera (muestra solo con un paso de
lancha Verde, puesto que el procedimiento se repite para las frecuencias de interés):
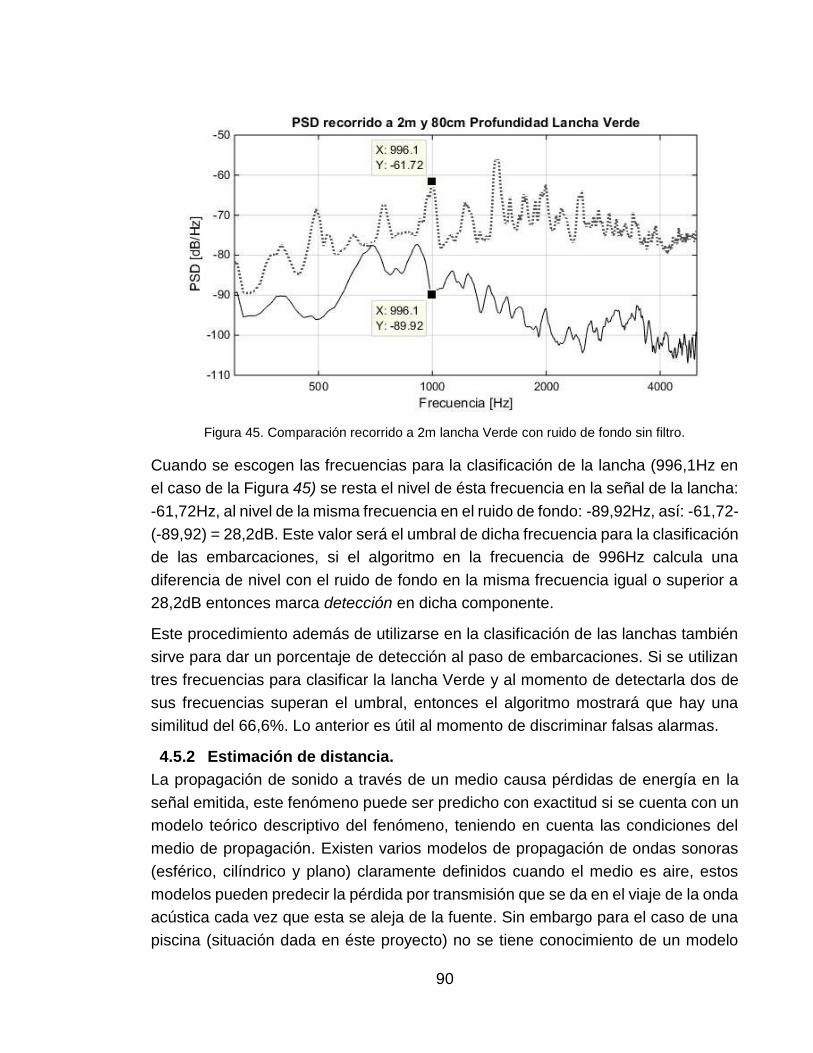
90
Figura 45. Comparación recorrido a 2m lancha Verde con ruido de fondo sin filtro.
Cuando se escogen las frecuencias para la clasificación de la lancha (996,1Hz en
el caso de la Figura 45) se resta el nivel de ésta frecuencia en la señal de la lancha:
-61,72Hz, al nivel de la misma frecuencia en el ruido de fondo: -89,92Hz, así: -61,72-
(-89,92) = 28,2dB. Este valor será el umbral de dicha frecuencia para la clasificación
de las embarcaciones, si el algoritmo en la frecuencia de 996Hz calcula una
diferencia de nivel con el ruido de fondo en la misma frecuencia igual o superior a
28,2dB entonces marca detección en dicha componente.
Este procedimiento además de utilizarse en la clasificación de las lanchas también
sirve para dar un porcentaje de detección al paso de embarcaciones. Si se utilizan
tres frecuencias para clasificar la lancha Verde y al momento de detectarla dos de
sus frecuencias superan el umbral, entonces el algoritmo mostrará que hay una
similitud del 66,6%. Lo anterior es útil al momento de discriminar falsas alarmas.
4.5.2 Estimación de distancia.
La propagación de sonido a través de un medio causa pérdidas de energía en la
señal emitida, este fenómeno puede ser predicho con exactitud si se cuenta con un
modelo teórico descriptivo del fenómeno, teniendo en cuenta las condiciones del
medio de propagación. Existen varios modelos de propagación de ondas sonoras
(esférico, cilíndrico y plano) claramente definidos cuando el medio es aire, estos
modelos pueden predecir la pérdida por transmisión que se da en el viaje de la onda
acústica cada vez que esta se aleja de la fuente. Sin embargo para el caso de una
piscina (situación dada en éste proyecto) no se tiene conocimiento de un modelo
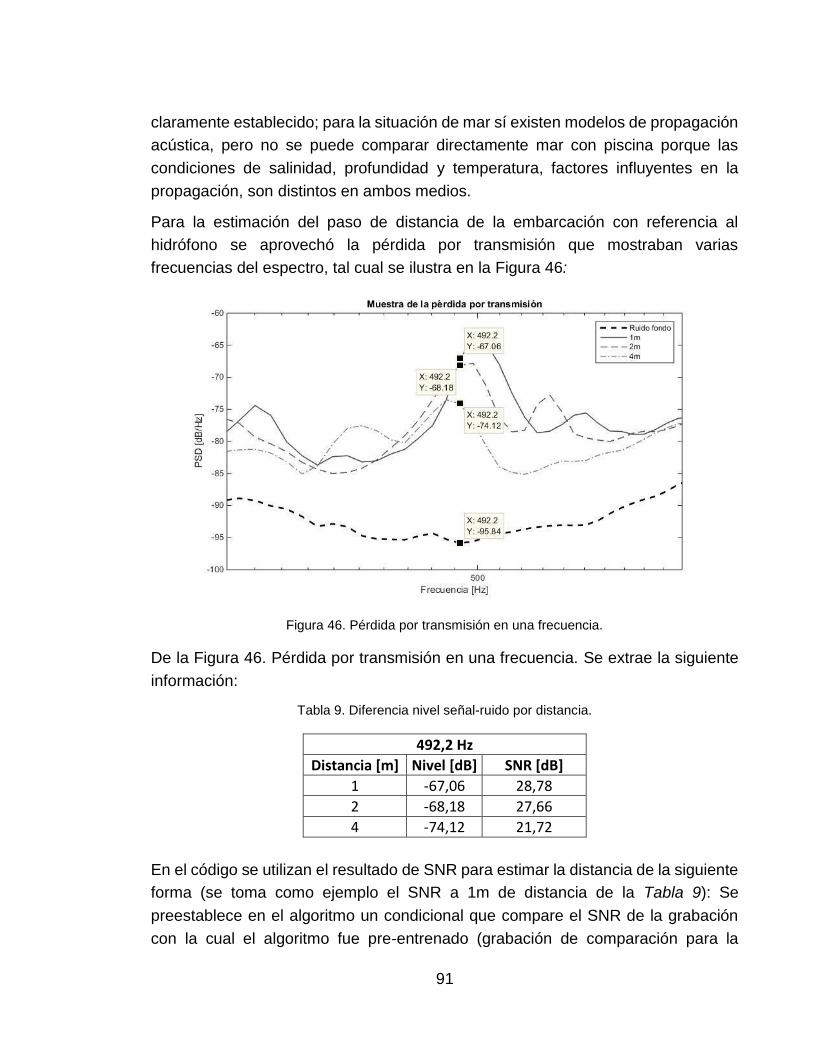
91
claramente establecido; para la situación de mar sí existen modelos de propagación
acústica, pero no se puede comparar directamente mar con piscina porque las
condiciones de salinidad, profundidad y temperatura, factores influyentes en la
propagación, son distintos en ambos medios.
Para la estimación del paso de distancia de la embarcación con referencia al
hidrófono se aprovechó la pérdida por transmisión que mostraban varias
frecuencias del espectro, tal cual se ilustra en la Figura 46:
Figura 46. Pérdida por transmisión en una frecuencia.
De la Figura 46. Pérdida por transmisión en una frecuencia. Se extrae la siguiente
información:
Tabla 9. Diferencia nivel señal-ruido por distancia.
492,2 Hz
Distancia [m] Nivel [dB] SNR [dB]
1 -67,06 28,78
2 -68,18 27,66
4 -74,12 21,72
En el código se utilizan el resultado de SNR para estimar la distancia de la siguiente
forma (se toma como ejemplo el SNR a 1m de distancia de la Tabla 9): Se
preestablece en el algoritmo un condicional que compare el SNR de la grabación
con la cual el algoritmo fue pre-entrenado (grabación de comparación para la
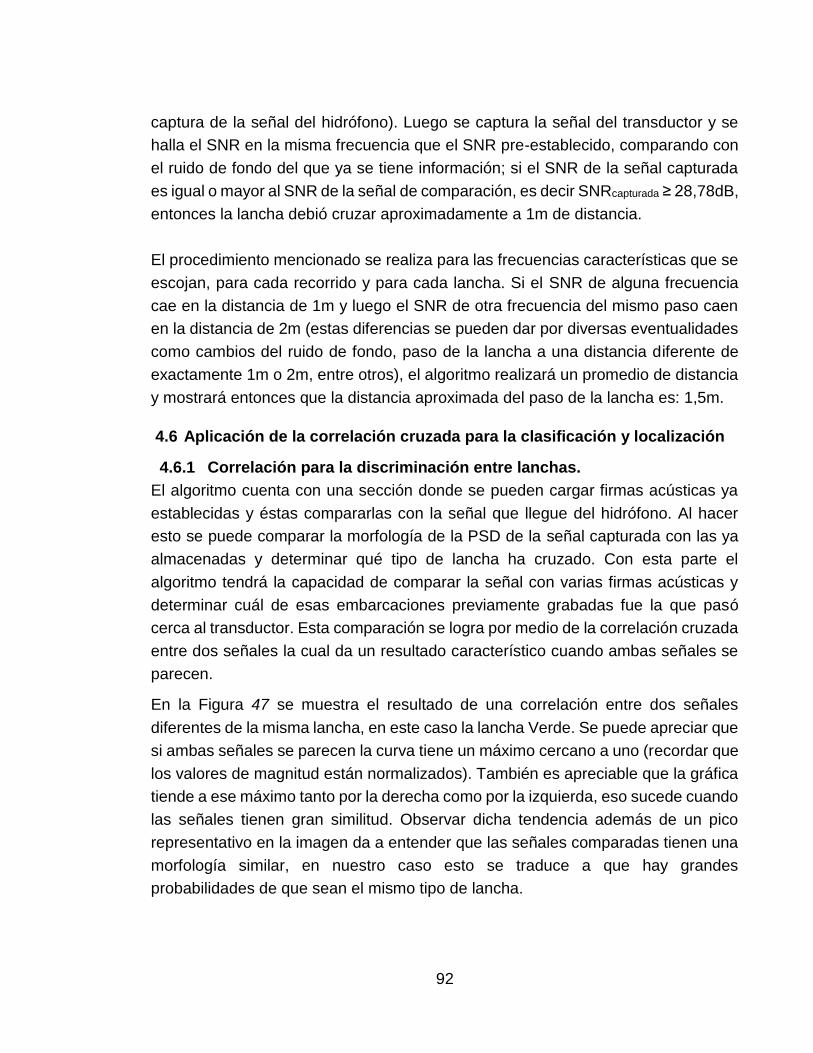
92
captura de la señal del hidrófono). Luego se captura la señal del transductor y se
halla el SNR en la misma frecuencia que el SNR pre-establecido, comparando con
el ruido de fondo del que ya se tiene información; si el SNR de la señal capturada
es igual o mayor al SNR de la señal de comparación, es decir SNRcapturada ≥ 28,78dB,
entonces la lancha debió cruzar aproximadamente a 1m de distancia.
El procedimiento mencionado se realiza para las frecuencias características que se
escojan, para cada recorrido y para cada lancha. Si el SNR de alguna frecuencia
cae en la distancia de 1m y luego el SNR de otra frecuencia del mismo paso caen
en la distancia de 2m (estas diferencias se pueden dar por diversas eventualidades
como cambios del ruido de fondo, paso de la lancha a una distancia diferente de
exactamente 1m o 2m, entre otros), el algoritmo realizará un promedio de distancia
y mostrará entonces que la distancia aproximada del paso de la lancha es: 1,5m.
4.6 Aplicación de la correlación cruzada para la clasificación y localización
4.6.1 Correlación para la discriminación entre lanchas.
El algoritmo cuenta con una sección donde se pueden cargar firmas acústicas ya
establecidas y éstas compararlas con la señal que llegue del hidrófono. Al hacer
esto se puede comparar la morfología de la PSD de la señal capturada con las ya
almacenadas y determinar qué tipo de lancha ha cruzado. Con esta parte el
algoritmo tendrá la capacidad de comparar la señal con varias firmas acústicas y
determinar cuál de esas embarcaciones previamente grabadas fue la que pasó
cerca al transductor. Esta comparación se logra por medio de la correlación cruzada
entre dos señales la cual da un resultado característico cuando ambas señales se
parecen.
En la Figura 47 se muestra el resultado de una correlación entre dos señales
diferentes de la misma lancha, en este caso la lancha Verde. Se puede apreciar que
si ambas señales se parecen la curva tiene un máximo cercano a uno (recordar que
los valores de magnitud están normalizados). También es apreciable que la gráfica
tiende a ese máximo tanto por la derecha como por la izquierda, eso sucede cuando
las señales tienen gran similitud. Observar dicha tendencia además de un pico
representativo en la imagen da a entender que las señales comparadas tienen una
morfología similar, en nuestro caso esto se traduce a que hay grandes
probabilidades de que sean el mismo tipo de lancha.
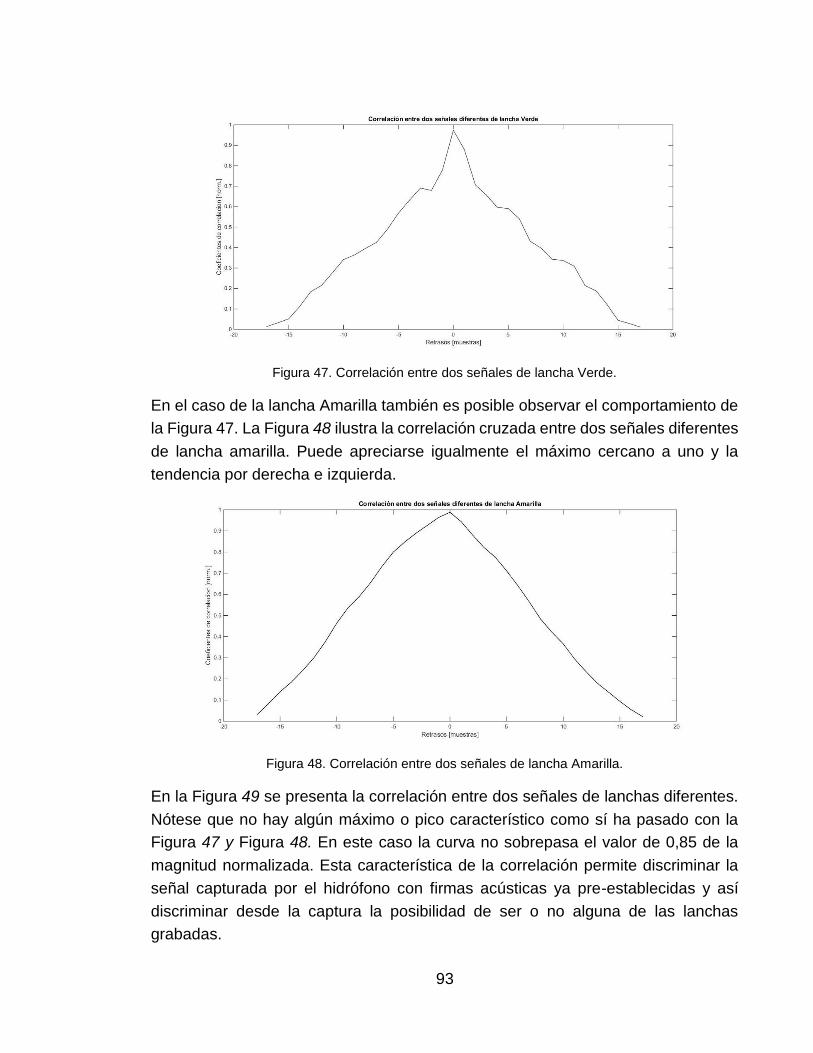
93
Figura 47. Correlación entre dos señales de lancha Verde.
En el caso de la lancha Amarilla también es posible observar el comportamiento de
la Figura 47. La Figura 48 ilustra la correlación cruzada entre dos señales diferentes
de lancha amarilla. Puede apreciarse igualmente el máximo cercano a uno y la
tendencia por derecha e izquierda.
Figura 48. Correlación entre dos señales de lancha Amarilla.
En la Figura 49 se presenta la correlación entre dos señales de lanchas diferentes.
Nótese que no hay algún máximo o pico característico como sí ha pasado con la
Figura 47 y Figura 48. En este caso la curva no sobrepasa el valor de 0,85 de la
magnitud normalizada. Esta característica de la correlación permite discriminar la
señal capturada por el hidrófono con firmas acústicas ya pre-establecidas y así
discriminar desde la captura la posibilidad de ser o no alguna de las lanchas
grabadas.
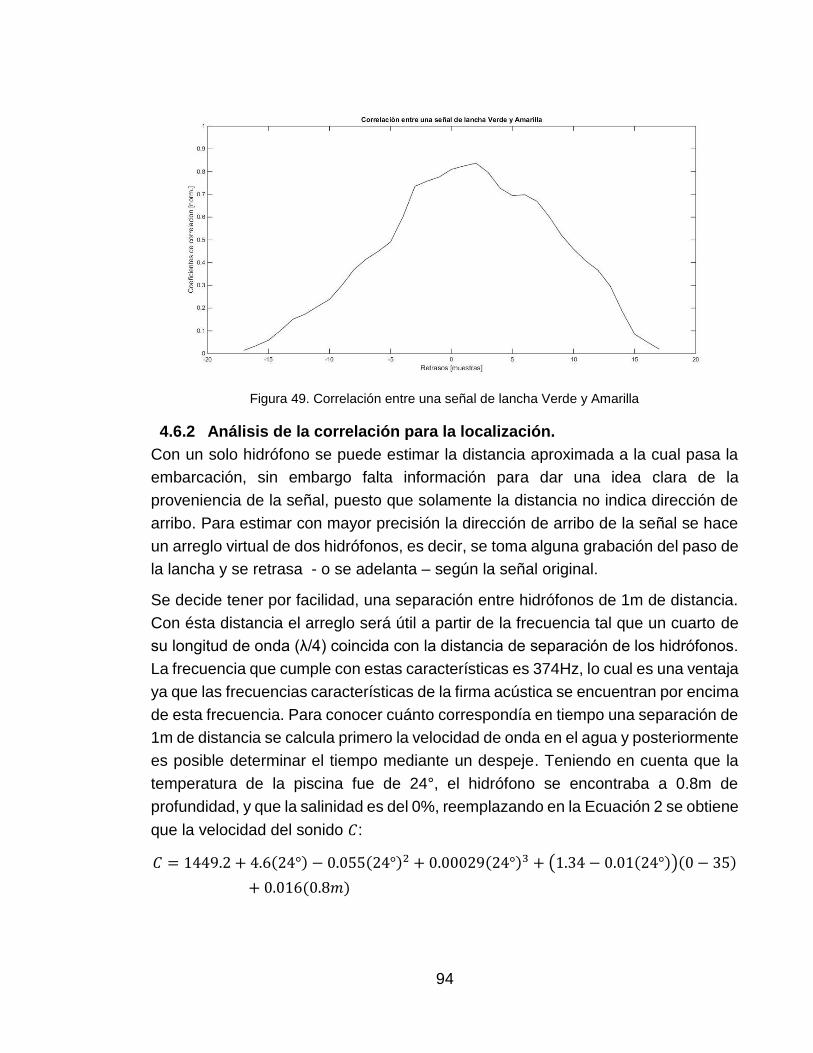
94
Figura 49. Correlación entre una señal de lancha Verde y Amarilla
4.6.2 Análisis de la correlación para la localización.
Con un solo hidrófono se puede estimar la distancia aproximada a la cual pasa la
embarcación, sin embargo falta información para dar una idea clara de la
proveniencia de la señal, puesto que solamente la distancia no indica dirección de
arribo. Para estimar con mayor precisión la dirección de arribo de la señal se hace
un arreglo virtual de dos hidrófonos, es decir, se toma alguna grabación del paso de
la lancha y se retrasa - o se adelanta – según la señal original.
Se decide tener por facilidad, una separación entre hidrófonos de 1m de distancia.
Con ésta distancia el arreglo será útil a partir de la frecuencia tal que un cuarto de
su longitud de onda (λ/4) coincida con la distancia de separación de los hidrófonos.
La frecuencia que cumple con estas características es 374Hz, lo cual es una ventaja
ya que las frecuencias características de la firma acústica se encuentran por encima
de esta frecuencia. Para conocer cuánto correspondía en tiempo una separación de
1m de distancia se calcula primero la velocidad de onda en el agua y posteriormente
es posible determinar el tiempo mediante un despeje. Teniendo en cuenta que la
temperatura de la piscina fue de 24°, el hidrófono se encontraba a 0.8m de
profundidad, y que la salinidad es del 0%, reemplazando en la Ecuación 2 se obtiene
que la velocidad del sonido 𝐶:
𝐶 = 1449.2 + 4.6(24°) − 0.055(24°)2 + 0.00029(24°)3 + (1.34 − 0.01(24°))(0 − 35)
+ 0.016(0.8𝑚)
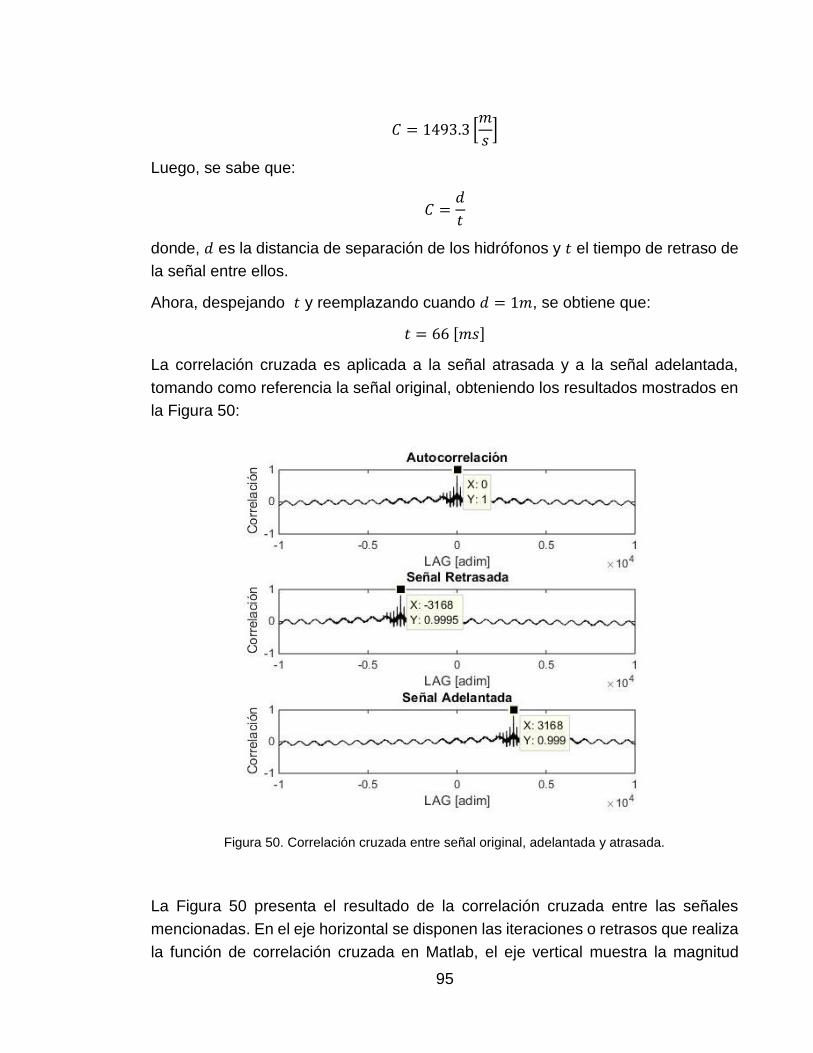
95
𝐶 = 1493.3 [𝑚
𝑠]
Luego, se sabe que:
𝐶 =𝑑
𝑡
donde, 𝑑 es la distancia de separación de los hidrófonos y 𝑡 el tiempo de retraso de
la señal entre ellos.
Ahora, despejando 𝑡 y reemplazando cuando 𝑑 = 1𝑚, se obtiene que:
𝑡 = 66 [𝑚𝑠]
La correlación cruzada es aplicada a la señal atrasada y a la señal adelantada,
tomando como referencia la señal original, obteniendo los resultados mostrados en
la Figura 50:
Figura 50. Correlación cruzada entre señal original, adelantada y atrasada.
La Figura 50 presenta el resultado de la correlación cruzada entre las señales
mencionadas. En el eje horizontal se disponen las iteraciones o retrasos que realiza
la función de correlación cruzada en Matlab, el eje vertical muestra la magnitud
96
normalizada de la correlación. Efectivamente la correlación cruzada de la señal con
ella misma da su valor máximo en la muestra de retraso 0 (cero), esto indica que
ambas señales están llegando al tiempo. En la señal retrasada el máximo valor
aparece en -3168, esto indica que las dos señales correlacionadas tienen un retraso
de 3168 muestras. Si la frecuencia de muestreo es 48000Hz por segundo y el
retraso entre ambas señales es el mencionado anteriormente entonces el desfase
en tiempo que ha obtenido la operación de correlación es:
𝐷𝑒𝑠𝑓𝑎𝑠𝑒 = 1𝑠 ∗ (−3168 𝑚𝑢𝑒𝑠𝑡𝑟𝑎𝑠)
48000 𝑚𝑢𝑒𝑠𝑡𝑟𝑎𝑠= −0,066 = −𝟔𝟔𝒎𝒔.
Este resultado concuerda con el tiempo de retraso hallado usando la velocidad de
sonido en el agua, esto indica que la correlación cruzada es útil para determinar
efectivamente si la señal está retrasada o adelantada según una referencia e indicar
entonces si el arribo de la señal viene de adelante del arreglo o de atrás como se
nota en la Figura 51 . El análisis de la señal adelantada es igual al realizado con la
señal retrasada.
Si en la práctica se contara con dos hidrófonos iguales, cada uno de estos recibiría
el mismo paso de la embarcación con una diferencia de tiempo determinada por la
separación de los transductores. Esta técnica es una aplicación de ITD (Diferencias
Interaurales de tiempo, por sus siglas en inglés) donde se utiliza la correlación
cruzada para la identificación de arribo de la señal [42]. Hacia el lado donde la
lancha haya pasado, la señal llegaría primero al hidrófono de dicho lado y luego al
de la posición opuesta, al hacer la correlación de las señales captadas por cada
hidrófono se tendría una situación similar a la Figura 50, arrojando como resultado
si la señal arribó desde adelante o desde atrás del arreglo, tal como muestran las
gráficas de retraso y adelanto de la Figura 510.
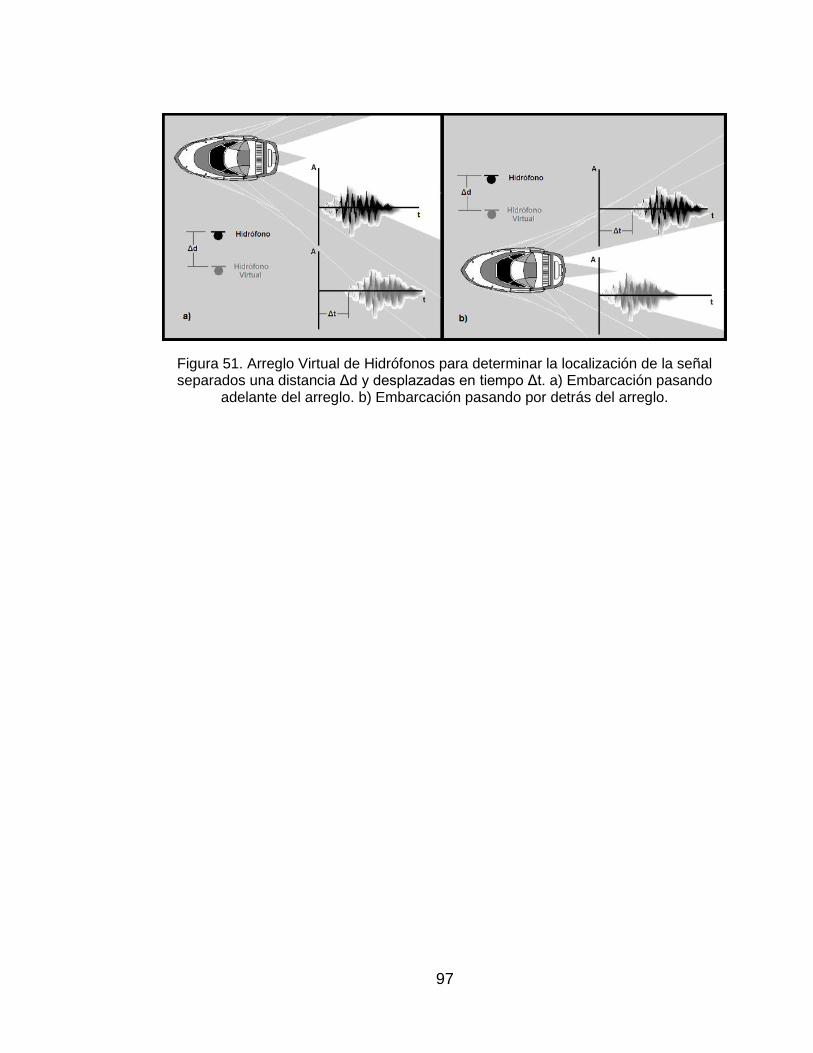
97
Figura 51. Arreglo Virtual de Hidrófonos para determinar la localización de la señal separados una distancia Δd y desplazadas en tiempo Δt. a) Embarcación pasando
adelante del arreglo. b) Embarcación pasando por detrás del arreglo.
98
5. Conclusiones
Una mejor relación señal a ruido (ruido de fondo bajo en comparación a la señal de
las lanchas), conlleva a una mejor detección y clasificación de las embarcaciones,
reduciendo así las probabilidades de falsas alarmas (ver sección 4.3).
A pesar de las diferentes condiciones de operación en las que puede funcionar una
embarcación (cambio de peso o velocidad), hay frecuencias que se mantienen en
todo momento, estas son las frecuencias utilizadas para discriminar lanchas de
diferente tipo (ver sección 4.4).
La relación señal a ruido permitió determinar los umbrales de detección con los aba
el tipo de lancha verde o amarilla, además de estimar la distancia a la cual se
encuentra la embarcación del hidrófono (ver sección 4.5).
El algoritmo se programó teniendo en cuenta los resultados y el análisis de los
mismos. Fue puesto a prueba y el producto final cuenta con la posibilidad de
distinguir entre el paso de los dos tipos de lancha y estimar una distancia
aproximada del paso de éstas. Para esto se usaron todos los recursos teóricos
como la correlación, la teoría de sonar pasivo y la estimación de densidad espectral
(ver sección 4.1 y Anexos A1, A2, A3, A4, A5).
La dirección de arribo de la señal se logra discriminar con el uso de la correlación
cruzada, aunque solo es posible diferenciar entre un lado frontal y posterior del
arreglo. Para la implementación en tiempo real de ésta fase es necesario el uso de
dos hidrófonos (ver sección 4.6).
99
6. Referencias
[1] A. Nehorai y E. Paldi, «Acoustic vector-sensor array processing,» Signal
Processing, IEEE Transactions on, vol. 42, nº 9, pp. 2481-2491, Sep 1994.
[2] K. Wong y M. Zoltowski, «Extended-aperture underwater acoustic multisource
azimuth/elevation direction-finding using uniformly but sparsely spaced vector
hydrophones,» Oceanic Engineering, IEEE Journal of, vol. 22, nº 4, pp. 659-
672, Oct 1997.
[3] B. Xerri, J.-F. Cavassilas y B. Borloz, «Passive tracking in underwater
acoustic,» Signal Processing , vol. 82, nº 8, pp. 1067-1085, 2002.
[4] D. Zha y T. Qiu, «Underwater sources location in non-Gaussian impulsive noise
environments,» Digital Signal Processing , vol. 16, nº 2, pp. 149-163, 2006.
[5] P. Giraudet y H. Glotin, «Real-time 3D tracking of whales by echo-robust
precise TDOA estimates with a widely-spaced hydrophone array,» Applied
Acoustics , vol. 67, nº 11–12, pp. 1106-1117, 2006.
[6] B. Borowski, A. Sutin, H.-S. Roh y B. Bunin, «Passive acoustic threat detection
in estuarine environments,» de Society of Photo-Optical Instrumentation
Engineers (SPIE) Conference Series, 2008.
[7] J. He y Z. Liu, «Efficient underwater two-dimensional coherent source
localization with linear vector-hydrophone array,» Signal Processing , vol. 89,
nº 9, pp. 1715-1722, 2009.
[8] J. He y Z. Liu, «Underwater acoustic azimuth and elevation angle estimation
using spatial invariance of two identically oriented vector hydrophones at
unknown locations in impulsive noise,» Digital Signal Processing , vol. 19, nº
3, pp. 452-462, 2009.
[9] M. R. Arshad, «Recent advancement in sensor technology for underwaters
applications.,» Indian Journal of Marine Sciences, vol. 38, pp. 267-273, 2009.
[10] P. Felisberto, P. Santos y S. Jesus, «Tracking Source azimuth Using a Single
Vector Sensor,» de Sensor Technologies and Applications (SENSORCOMM),
2010 Fourth International Conference on, 2010.
100
[11] P. Santos, P. Felisberto y S. Jesus, «Vector Sensor Arrays in Underwater
Acoustic Applications,» de Emerging Trends in Technological Innovation, vol.
314, L. Camarinha-Matos, P. Pereira y L. Ribeiro, Edits., Springer Berlin
Heidelberg, 2010, pp. 316-323.
[12] L. Houégnigan, S. Zaugg, M. van der Schaar y M. André, «Space–time and
hybrid algorithms for the passive acoustic localisation of sperm whales and
vessels,» Applied Acoustics , vol. 71, nº 11, pp. 1000-1010, 2010.
[13] Tesei.A, «Localization of small surface vessels through acoustic data fusion of
two tetrahedral arrays of hydrophones,» Proceedings of Meetings on
Acoustics, vol. 17, nº 5, pp. POMA 17, 070050, 2013.
[14] J. Haitsma y T. Kalker, «A Highly Robust Audio Fingerprinting System,» de
Proceedings of the Third International Conference on Music Information
Retrieval, Paris, France, 2002.
[15] Y. Ke, D. Hoiem y R. Sukthankar, «Computer vision for music identification,»
de Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE
Computer Society Conference on, 2005.
[16] S. Baluja y M. Covell, «Content fingerprinting using wavelets,» de European
Conference on Visual Media Production (CVMP), 2006.
[17] M.-L. Bourguet y J. Wang, «A Robust Audio Feature Extraction Algorithm for
Music Identification,» de Audio Engineering Society Convention 129, 2010.
[18] A. Ramalingam y S. Krishnan, «Gaussian Mixture Modeling of Short-Time
Fourier Transform Features for Audio Fingerprinting,» Information Forensics
and Security, IEEE Transactions on, vol. 1, nº 4, pp. 457-463, Dec 2006.
[19] G. Tzanetakis y P. Cook, «Musical genre classification of audio signals,»
Speech and Audio Processing, IEEE Transactions on, vol. 10, nº 5, pp. 293-
302, Jul 2002.
[20] C. A. Capitán Rafael ricardo torres parra, «Propuesta De Un Sistema De
Detección Acústica Y Clasificación Autónoma De De Blancos En El Mar Para
Mejorar La Defensa Marítima Nacional. Fuerzas Militares De Colombia.,»
2009.
101
[21] C. Eckart. N. S. T. Reports, Principles Of Underwater Sound, Ed., Research
Analysis Group, 2012.
[22] U. de San Buenaventura, «Proyecto de Investigación SIDACAM,» Documentos
de Insumo. 2014.
[23] International Association of Oil & Gas Producers «Fundamentals for
Underwater sound,» Report No:406, 2008.
[24] K.Dieter, Underwater Acoustics, Institute of Wateracoustics, Sonar
Engineering and Signal Theory, Hochschule Bremen..
[25] R. P. Hodges, Underwater Acoustics: Analysis, Design and Performance of
Sonar, Wiley, Ed., Wiley, 2010.
[26] U. de Tarapacá, «Conceptos básicos de Señales y Sistemas,» Universidad de
Tarapacá, pp. 1-8.
[27] Briceño.Y.Y, «Descripción Matemática del Comportamiento Dinámico de un
Sistema de Control Mediante la Identificación de Parámetros a partir de datos
experimentales». Universidad Pontificia Bolivariana Seccional Bucaramanga
2011.
[28] C. Bencardino, Estadística y muestreo, Ecoe Ediciones, 1984.
[29] B. Shapiro, «An analysis of variance test for normality (complete samples),»
Biometrika, vol. 52, p. 591–611, 1965.
[30] R. H. Bartels, J. Beatty y B. Barsky, An Introduction to Splines for Use in
Computer Graphics and Geometric Modeling, Morgan Kaufmann, 1995.
[31] F. Caillé, «Sillages de bulles des navires de surface,» Université de Provence
Aix-Marseille, Institut de Recherche sur les Phénomènes Hors Équilibre, 2007.
[32] S. A. Culture, «Aquaculture Equipments». Public Brochure.
[33] C. B. J. Sherman, Transducers and arrays for underwater sound., Springer,
2007.
[34] J. Proakis y D. Manolakis, Tratamiento digital de Señales, Pearson Educación,
2007.
102
[35] A. Poularikas, Signals and Systems Primer with MATLAB, Taylor \& Francis,
2006.
[36] A. Colomer, V. Ornedo y J. Nebot, TRATAMIENTO DIGITAL DE LA SEÑAL.
TEORÍA Y APLICACIONES, Universitat Politécnica de Valéncia, 2007.
[37] W. D. Zhang, L. G. Guan, G. J. Zhang, C. Y. Xue, K. R. Zhang y J. P. Wang,
«Research of DOA Estimation Based on Single MEMS Vector Hydrophone,»
Sensors, vol. 9, nº 9, pp. 6823-6834, 2009.
[38] T. S. D. (Shendkar)., «Application of MUSIC, ESPRIT and ROOT MUSIC in
DOA Estimation,» Faculty of Electrical Engineering and Computing,University
of Zagreb,Croatia.
[39] Debevoise.T, Geneva.R, The Microguide to Process Modeling in BPMN 2.0:
How to Build Great Process, Rule, and Event Models, TIPS Technical
Publishing,Inc., 2011.
[40] HOMSEC, Informe del evento, 5to Salón Internacional de Tecnologías de
Seguridad Nacional, 2015.
[41] A. Webster, Estadística aplicada para administración y economía, Irwin, 1996.
[42] J. C. Murray, H. Erwin y S. Wermter, «Robotic Sound-Source Localization and
Tracking Using Interaural Time Difference and Cross-Correlation,» de
Neurobotics, Sunderland, 2004.
[43] P. Stoica y R. Moses, Spectral Analysis Of Signals, Prentice Hall, 2005.
[44] L. Stankovic, V. Popovic y M. Dakovic, «On the Capon's method application in
time-frequency analysis,» de Signal Processing and Information Technology,
2003. ISSPIT 2003. Proceedings of the 3rd IEEE International Symposium on,
2003.
[45] N. de Moura y R. Ramos, «Passive Sonar Signal Detection and Classification
Based on Independent Component Analysis, Sonar Systems,» Federal
University of Rio de Janeiro, COPPE/Poli, Signal Processing Laboratory, Rio
de Janeiro, Brazil, 2011.
[46] Rabiner.L, Fundamentals of Speech Recognition, Prentice-Hall International,
1993.
103
[47] E. F. García, «Métodos spline aplicados a la estimación de la densidad
espectral,» Estadística Española, vol. 37, pp. 435-459, 1995.
[48] C. J. F. Flores, «Modelo de regresión de Cox usando Splines,» 2011.
[49] F. O. Facundo Bellesi, Reconocimiento de Voz para Aplicación en Domótica.
[50] Brandon.G, Sensor and Technology Applications in Port Security, CSR, Ed.,
Stevens Institute of Technology, 2011.
[51] A. Averbuch, V. Zheludev, P. Neittaanmäki, P. Wartiainen, K. Huoman y K.
Janson, «Acoustic detection and classification of river boats,» Applied
Acoustics , vol. 72, nº 1, pp. 22-34, 2011.
[52] R. Adve, «Direction of Arrival Estimation,» Department of Electrical and
Computer Engineering University of Toronto.
[53] Sutin.A, «Acoustic measurement of bubbles in the wake of ship model in a
tank,» de Acoustic 08 Paris, 2008.
104
ANEXOS
A.1 Código para la obtención de máximos de la señal.
clc close all tic %% Cargo de señal y otros datos. dim_fft = 2048*2; F3dB1 = 300; n = 35; MaxdB=zeros(1,n); FreqDeMaxA=zeros(1,n); NL_dBTotalA = zeros(1,n); DT_PSDTotalA= zeros(1,n); SL_TL_PSDTotalA = zeros(1,n); MaxdB2 = -200; [y, fs] = audioread('R2-INT1.wav'); [y2, ~] = audioread('RUIDO DE FONDO RECOR.wav');
%% Llenado del vector de máximos. for i=1:n % Diseño Filtro Pasa-Banda N = 8; F3dB2 = F3dB1 + 50; h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); Y = filter(Hd,y); % PSD [pxx,f]=pwelch(Y, hamming(dim_fft),[], [], fs); pxxdB = 10*log10(pxx); semilogx(f,pxxdB) xlim([300 2500]) % Máximos [MaxdB(i),position] = max(pxxdB); FreqDeMaxA(i) = f(position); F3dB1 = F3dB2; hold on end MaximosYSusFrecuenciasA = [MaxdB;FreqDeMaxA]; semilogx(FreqDeMaxA,MaxdB,'linewidth',3)
%% Graficación
[NL_PSD,f] = pwelch(y2,hamming(dim_fft),[],[],fs); [M_40M_PSD,~] = pwelch(y,hamming(dim_fft),[],[],fs); NL_PSD = 10*log10(abs(NL_PSD)); M_40M_PSD = 10*log10(abs(M_40M_PSD)); plot1=plot(f,M_40M_PSD,'b',f,NL_PSD,'r'); set(plot1(1),'DisplayName','Señal'); set(plot1(2),'DisplayName','Ruido Fondo'); legend xlim([200 5000]) xlabel('Frecuencia [Hz]') ylabel('PSD [dB/Hz]') title('Comparación señal de análisis con ruido de fondo.')
105
%% Umbrales de detección for i=1:n % Diseño Filtro Pasa-Banda 1 N = 8; F3dB1 = FreqDeMaxA(i)-f(5); F3dB2 = FreqDeMaxA(i)+f(5); h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); NL_FIL = filter(Hd,y2); M_FIL = filter(Hd,y); NL_PSD_FIL = pwelch(NL_FIL,hamming(dim_fft),[],[],fs); M_PSD_FIL = pwelch(M_FIL,hamming(dim_fft),[],[],fs);
NL_dB = 10*log10(sum(NL_PSD_FIL(find(f==F3dB1):find(f==F3dB2)))); SL_TL_PSD = 10*log10(sum(M_PSD_FIL(find(f==F3dB1):find(f==F3dB2)))); DT_PSD = SL_TL_PSD - NL_dB + 1; SL_TL_PSDTotalA(i)=SL_TL_PSD; NL_dBTotalA(i) = NL_dB; DT_PSDTotalA(i)= DT_PSD; end
save ('FreqDeMaxA','FreqDeMaxA') save('NL_dBTotalA','NL_dBTotalA'); save('DT_PSDTotalA','DT_PSDTotalA'); save('SL_TL_PSDTotalA','SL_TL_PSDTotalA'); save ('MaximosYSusFrecuenciasA','MaximosYSusFrecuenciasA') save('f','f') toc
A.2 Código para la obtención de firma acústica
clc close all tic %% Determinación de máximos. dim_fft = 2048*2; n = 35; F3dB1 = 300; FirmaV = zeros(1,n); MaxdB=zeros(1,n); FreqDeMax2=zeros(1,n); [y, fs] = audioread('R2-INT1.wav'); [y2, ~] = audioread('RUIDO DE FONDO RECOR.wav'); [pxx,~]=pwelch(y, hamming(dim_fft),[], [], fs); [pxx2,f]=pwelch(y2, hamming(dim_fft),[], [], fs); plot(f,10*log10(pxx),'r',f,10*log10(pxx2)) xlim([300,5000])
%Llenado del vector de máximos. for i=1:n % Diseño Filtro Pasa-Banda N = 8;
106
F3dB2 = F3dB1 + 50; h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); Y = filter(Hd,y); % PSD [pxx,f]=pwelch(Y, hamming(dim_fft),[], [], fs); pxxdB = 10*log10(pxx); % Máximos [MaxdB(i),position] = max(pxxdB); FreqDeMax2(i) = f(position); F3dB1 = F3dB2; end
%% Parámetros firma acústica prom = sum(MaxdB)/n; Comp_Prom = zeros(1,n); Comp_Log = zeros(1,n);
for i=1:n Comp_Prom(i) = MaxdB(i)/prom; FirmaV(i) =1./(Comp_Prom(i))^100; Comp_Log(i) = log10(Comp_Prom(i)); end
MaximosYSusFrecuencias =
[FreqDeMax2',MaxdB',Comp_Prom',FirmaV',Comp_Log']; save('FirmaV','FirmaV') save ('MaximosYSusFrecuencias','MaximosYSusFrecuencias') filename = 'MáximosFirmaAcústica.xlsx'; xlswrite(filename,MaximosYSusFrecuencias)
A.3 Código encargado de grabación y comparación con firmas acústicas pre-
establecidas.
clc close all %% Cargo Variables fs = 48000; dim_fft = 2048*2; load FirmaV load FirmaA
%% Grabación Indicator = 1; recObj = audiorecorder(48000, 16,1); while Indicator < 2 disp('Comienzo Grabación.') recordblocking(recObj, 9); disp('Fin Grabación.'); M = getaudiodata(recObj); %% Firma acústica n = length(FirmaV); MaxdB=zeros(1,n);
107
F3dB1 = 300; for i=1:n % Diseño Filtro Pasa-Banda N = 8; F3dB2 = F3dB1 + 50; h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); Y = filter(Hd,M); % PSD [pxx,f]=pwelch(Y, hamming(dim_fft),[], [], fs); pxxdB = 10*log10(pxx); % Máximos [MaxdB(i),position] = max(pxxdB); F3dB1 = F3dB2; end % Comparación con promedo. prom = sum(MaxdB)/n; Comp_Prom = zeros(1,n); Comp_Potencia2 = zeros(1,n);
for i=1:n Comp_Prom(i) = MaxdB(i)/prom; Comp_Potencia2(i) = 1./(Comp_Prom(i))^100; end [CorrelaV,LeggV] = xcorr(Comp_Potencia2,FirmaV,'coeff'); [CorrelaA,LeggA] = xcorr(Comp_Potencia2,FirmaA,'coeff'); MaxCorrV = max(CorrelaV); MaxCorrA = max(CorrelaA); [~,pos] = find(CorrelaV == MaxCorrV); valV = CorrelaV(pos); [~,pos] = find(CorrelaA == MaxCorrA); valA = CorrelaA(pos);
if valV > 0.8 disp('Posible Detección Lancha Verde.') EstimacionVerde(M) elseif valA >= 0.7 disp('Posible Detección Lancha Amarilla') EstimacionAmarilla(M) end disp('--------------') Indicator = 1; end
108
A.4 Código para detección de umbrales y estimación de distancia lancha
verde.
function EstimacionVerde(M) fs = 48000; % Frecuencia de Sampleo dim_fft = 2048*2; distancia = zeros(1,3); load NL_dBTotalV load DT_PSDTotalV load FreqDeMaxV load f %% Primer filtro N = 8; % Filter Order F3dB1 = FreqDeMaxV(15)-f(5); % cutoff frequency 1 F3dB2 = FreqDeMaxV(15)+f(5); % cutoff frequency 2 h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); M_FIL = filter(Hd,M); [M_PSD, ~] = pwelch(M_FIL,hamming(dim_fft),[],[],fs); SL_TL_M = 10*log10(sum(M_PSD(find(f==F3dB1):find(f==F3dB2)))); DT_M = SL_TL_M - NL_dBTotalV(15)+ 1; DT_MTotal(1) = DT_M; if DT_M >= 31 distancia(1) = 1; elseif 27 <= DT_M && DT_M < 31 distancia(1) = 2; else if 15 < DT_M && DT_M < 27 distancia(1) = 4; end end
%% Segundo Filtro N = 8; % Filter Order F3dB1 = FreqDeMaxV(20)-f(5); % cutoff frequency 1 F3dB2 = FreqDeMaxV(20)+f(5); % cutoff frequency 2 h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); M_FIL = filter(Hd,M); [M_PSD, ~] = pwelch(M_FIL,hamming(dim_fft),[],[],fs); SL_TL_M = 10*log10(sum(M_PSD(find(f==F3dB1):find(f==F3dB2)))); DT_M = SL_TL_M - NL_dBTotalV(20) + 1; DT_MTotal(2) = DT_M; if DT_M >= 25 distancia(2) = 1; elseif 17 <= DT_M && DT_M < 25 distancia(2) = 2; else if 8 < DT_M && DT_M < 17 distancia(2)=4; end end
%% Tercer Filtro N = 8; % Filter Order F3dB1 = FreqDeMaxV(25)-f(5); % cutoff frequency 1 F3dB2 = FreqDeMaxV(25)+f(5); % cutoff frequency 2
109
h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); M_FIL = filter(Hd,M); [M_PSD, ~] = pwelch(M_FIL,hamming(dim_fft),[],[],fs); SL_TL_M = 10*log10(sum(M_PSD(find(f==F3dB1):find(f==F3dB2)))); DT_M = SL_TL_M - NL_dBTotalV(25) + 1; DT_MTotal(3) = DT_M; if DT_M >= 37 distancia(3) = 1; elseif 33 <= DT_M && DT_M < 37 distancia(3) = 2; else if 25 < DT_M && DT_M < 33 distancia(3)=4; end end
%% Análisis detección cont = 0; if DT_MTotal(1) >= DT_PSDTotalV(15); disp('>>> Detección Freq 1') cont = cont + 1; end if DT_MTotal(2) >= DT_PSDTotalV(20); disp('>>> Detección Freq 2') cont = cont + 1; end if DT_MTotal(3) >= DT_PSDTotalV(25); disp('>>> Detección Freq 3') cont = cont + 1; end
if cont == 1; disp('porcentaje de detección 33,333%') elseif cont == 2; disp ('Porcentaje de detección 66,666%') elseif cont == 3; disp ('Porcentaje de detección 100%') else disp('>>> No hay Detección') end
distancia = sum(distancia)/length(distancia); a = ['La distancia aproximada es: ', num2str(distancia),'m']; disp(a)
110
A.5 Código para detección de umbrales y estimación de distancia lancha
Amarilla.
function EstimacionAmarilla(M) fs = 48000; dim_fft = 2048*2; distancia = zeros(1,3); load NL_dBTotalA load DT_PSDTotalA load FreqDeMaxA load f %% Primer filtro N = 8; F3dB1 = FreqDeMaxA(8)-f(5); F3dB2 = FreqDeMaxA(8)+f(5); h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); M_FIL = filter(Hd,M); [M_PSD, ~] = pwelch(M_FIL,hamming(dim_fft),[],[],fs); SL_TL_M = 10*log10(sum(M_PSD(find(f==F3dB1):find(f==F3dB2)))); DT_M = SL_TL_M - NL_dBTotalA(8)+ 1; DT_MTotal(1) = DT_M; if DT_M >= 8.5 distancia(1) = 1; elseif 6 <= DT_M && DT_M < 8.5 distancia(1) = 2; else if 4 < DT_M && DT_M < 6 distancia(1) = 4; end end
%% Segundo Filtro N = 8; F3dB1 = FreqDeMaxA(12)-f(5); F3dB2 = FreqDeMaxA(12)+f(5); h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); M_FIL = filter(Hd,M); [M_PSD, ~] = pwelch(M_FIL,hamming(dim_fft),[],[],fs); SL_TL_M = 10*log10(sum(M_PSD(find(f==F3dB1):find(f==F3dB2)))); DT_M = SL_TL_M - NL_dBTotalA(12) + 1; DT_MTotal(2) = DT_M; if DT_M >= 7 distancia(2) = 1; elseif 4 <= DT_M && DT_M < 7 distancia(2) = 2; else if 2 < DT_M && DT_M < 4 distancia(2)=4; end end
%% Tercer Filtro N = 8; F3dB1 = FreqDeMaxA(24)-f(5); F3dB2 = FreqDeMaxA(24)+f(5);
111
h = fdesign.bandpass('N,F3dB1,F3dB2',N,F3dB1,F3dB2,fs); Hd = design(h,'butter'); M_FIL = filter(Hd,M); [M_PSD, ~] = pwelch(M_FIL,hamming(dim_fft),[],[],fs); SL_TL_M = 10*log10(sum(M_PSD(find(f==F3dB1):find(f==F3dB2)))); DT_M = SL_TL_M - NL_dBTotalA(24) + 1; DT_MTotal(3) = DT_M; if DT_M >= 19.5 distancia(3) = 1; elseif 17 <= DT_M && DT_M < 19.5 distancia(3) = 2; else if 13 < DT_M && DT_M < 17 distancia(3)=4; end end
%% Análisis detección cont = 0; if DT_MTotal(1) >= DT_PSDTotalA(8); disp('>>> Detección Freq 1') cont = cont + 1; end if DT_MTotal(2) >= DT_PSDTotalA(12); disp('>>> Detección Freq 2') cont = cont + 1; end if DT_MTotal(3) >= DT_PSDTotalA(24); disp('>>> Detección Freq 3') cont = cont + 1; end
if cont == 1; disp('porcentaje de detección 33,333%') elseif cont == 2; disp ('Porcentaje de detección 66,666%') elseif cont == 3; disp ('Porcentaje de detección 100%') else disp('>>> No hay Detección') end
distancia = sum(distancia)/length(distancia); a = ['La distancia aproximada es: ', num2str(distancia),'m']; disp(a)
112
A.6 Código para la localización.
Se debe recibir la grabación de dos señales (correspondiente a un hidrófono
cada una)
clc close all %% Grabación 1 recObj = audiorecorder(48000, 16,1); disp('Comienzo Grabación.') recordblocking(recObj, 9); disp('Fin Grabación.'); M = getaudiodata(recObj); M = audioread(''); %señal de prueba. %% Grabación 2 recObj2 = audiorecorder(48000, 16,1); disp('Comienzo Grabación.') recordblocking(recObj2, 9); disp('Fin Grabación.'); N = getaudiodata(recObj2); N = audioread(''); %señal de prueba.
[Correla_MN,Lagg] = xcorr(M,N,'coeff'); [~,pos] = max(Correla_MN); if Lagg(pos) > 0 disp('La lancha cruzó por el lado A') elseif Legg(pos) < 0 disp('La lancha cruzó por el lado B') end
A.7 Código para el cálculo de variables estadísticas usando R (software).
library(modeest)
require(modeest)
library(e1071)
require(e1071)
#para el rango 1 = 451Hz a 539Hz
rango1<-frecuencia$Rango1
rango1
summary(rango1) #Calcula el mínimo, cuartiles, media, mediana y máximo
varianza1<-var(rango1) #Calcula la Varianza
varianza1
desviacion1<-sd(rango1) # Calcula la Desviación Estándar
desviacion1
curtosis1<-kurtosis(rango1,type=2) #Calcula la Curtosis
113
curtosis1
asimetria1<-skewness(rango1,type=2) #Calcula la Asimetría
asimetria1
moda1<-mfv(rango1) #Calcula la Moda
moda1
hist(rango1) # Grafica el Histograma
shapiro.test(rango1) #Realiza el Test de Shapiro-Wilk


















