6. MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0....
43
DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 72 CAPÍTULO 6 6. MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA Ansys puede usar diferentes métodos matemáticos para la resolución de las ecuaciones numéricas de equilibrio necesarias para resolver los problemas de elementos finitos planteados. En nuestro caso estamos interesados en la resolución de las ecuaciones de pandeo que se han planteado en el capítulo 4. Ansys dispone de métodos numéricos distintos según se esté resolviendo el problema lineal (Pandeo de Autovalores, apropiado para obtener una primera carga crítica de manera más rápida) o el problema no lineal (la carga crítica bajará al introducir no- linealidades en el problema). En este capítulo se presentan dichos métodos, introduciendo el cálculo de pandeo de autovalores primero y luego entrando más en detalle en el cálculo no lineal por ser este último más complejo y tener más problemas de convergencia. Los métodos numéricos de
Transcript of 6. MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0....
DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 72
CAPÍTULO 6
6. MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
Ansys puede usar diferentes métodos matemáticos para la resolución de las
ecuaciones numéricas de equilibrio necesarias para resolver los problemas de elementos
finitos planteados. En nuestro caso estamos interesados en la resolución de las
ecuaciones de pandeo que se han planteado en el capítulo 4.
Ansys dispone de métodos numéricos distintos según se esté resolviendo el
problema lineal (Pandeo de Autovalores, apropiado para obtener una primera carga crítica
de manera más rápida) o el problema no lineal (la carga crítica bajará al introducir no-
linealidades en el problema).
En este capítulo se presentan dichos métodos, introduciendo el cálculo de pandeo
de autovalores primero y luego entrando más en detalle en el cálculo no lineal por ser este
último más complejo y tener más problemas de convergencia. Los métodos numéricos de

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 73
cálculo no lineal se basan sobre todo en el método de Newton-Raphson y en variaciones
del mismo. Se verá cómo el programa los lleva a cabo, con las diferentes órdenes
asociadas y los parámetros de que dispone para controlar estos métodos.
Por último se hará especial hincapié en el método del “arc-length” que es el más
apropiado para el caso que se estudia en el presente proyecto.
6.1. Pandeo de Autovalores
El análisis de pandeo de autovalores predice la carga crítica de pandeo de una
estructura ideal lineal y elástica (es decir el punto de bifurcación en la curva carga-
desplazamiento de la estructura). Este método se corresponde con el método clásico del
análisis de pandeo elástico que se puede encontrar en los libros; por ejemplo, al hacer el
análisis de pandeo de autovalores de un cilindro hueco de espesor de pared constante
sometido a compresión pura los resultados se corresponden con la solución clásica de
Euler (4.36).
Sin embargo, las imperfecciones y otras no linealidades hacen que la mayoría de
las estructuras que podemos encontrar en la vida real no alcancen esta carga crítica
clásica de pandeo, sino que la carga real de pandeo será menor de la prevista por el
análisis elástico. Por esto este análisis sólo debe hacerse como paso previo de un análisis
no lineal o como una primera aproximación a la carga crítica de una estructura ya que
proporciona valores de la carga crítica mayores a los reales y que son, por tanto, no
seguros.
Ansys realiza el análisis de pandeo de autovalores usando un modelo linealizado
de estabilidad elástica. El punto de bifurcación se corresponde, en este caso, con el
crecimiento no acotado de un nuevo patrón de deformación. Una estructura con una curva
de comportamiento carga-desplazamiento como la mostrada en la figura 6.1.a puede ser
analizada bien por este método, mientras que si muestra el comportamiento mostrado en
la figura 6.1.b no se analiza bien.
DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 74
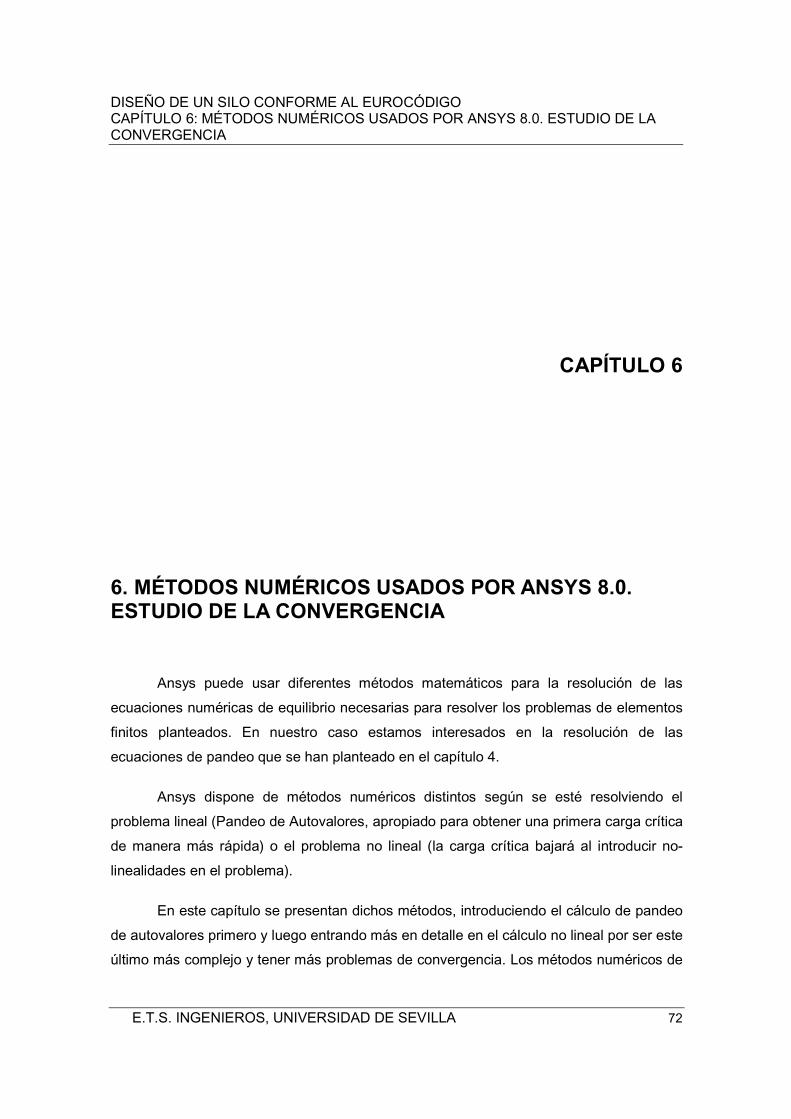
Figura 6.1: “Validez de los resultados de un análisis de pandeo de autovalores”
En cualquier cálculo de pandeo de una estructura se debe tener en cuenta el
fenómeno de “Stress stiffening”. Este es el fenómeno por el cual las fuerzas de membrana
(axiles) influyen en la rigidez a deflexión lateral; por ejemplo, una cuerda de guitarra se
hace más rígida al tensarla (su frecuencia natural de vibración es más alta), pero una
carga axial de compresión reduce la rigidez a flexión haciendo que la estructura se haga
inestable al alcanzar cierta carga: la carga crítica de pandeo.
Este fenómeno de 2º orden conocido como “Stress stiffening” se tiene en cuenta al
realizar el análisis de pandeo de autovalores de Ansys incluyendo un cálculo tensional
previo para incluir los efectos de las tensiones de membrana en la matriz de rigidez
geométrica (“stress stiffness matrix”) que se suma a la obtenida con la teoría de primer
orden.
ssK K Kσ= + (6.1)
La matriz de rigidez geométrica depende de:
- Geometría del elemento.
- Desplazamientos.
- Valores de los esfuerzos de membrana.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 75
6.1.1. Proceso del cálculo de Pandeo de Autovalores
Cuando se analiza el pandeo lineal en Ansys, el problema de pandeo es formulado
como un problema de autovalores siguiendo el siguiente proceso:
1. Se carga la estructura hasta un nivel arbitrario de referencia de cargas
exteriores, refF .
Se hace un análisis estático lineal para calcular los esfuerzos de membrana en
los elementos
ref refK D F⋅ = (6.2)
De la ecuación (6.2) calculamos los desplazamientos refD y después las
tensiones y esfuerzos correspondientes al nivel de carga refF .
Se calcula la matriz de rigidez geométrica para ese nivel de carga ,refKσ , para
ello se hace el análisis estático previo antes mencionado, para el cual se
introduce en el programa el código expuesto en la figura 6.2:
Figura 6.2: “Código de Ansys para el cálculo previo de la matriz de rigidez geométrica”
2. Para otro nivel de cargas exteriores se tiene:
,ref refF F K Kσ σλ λ= ⋅ ⇒ = ⋅ (6.3)
/SOLU ANTYPE,STATIC PSTRES,ON ! Aplicar cargasSOLVE FINISH

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 76
Al ser un análisis lineal, se supone que al multiplicar las cargas por λ también
se multiplican las tensiones por el mismo factor, pero sin cambiar la
distribución de tensiones.
Los desplazamientos para el nuevo valor de carga son
( ),ref refK K D Fσ λλ λ+ ⋅ ⋅ = ⋅ (6.4)
3. Si se aplica una perturbación sobre la carga δF, se produce un movimiento δD.
El pandeo (bifurcación del equilibrio) sucede cuando es posible un δD 0 con
δF=0:
( ) ( ),ref refK K D D Fσ λλ δ λ+ ⋅ ⋅ + = ⋅ (6.5)
Restando (6.5) y (6.4) se obtiene el problema de autovalores al que se alude al
realizar el análisis:
( ), 0refK K Dσλ δ+ ⋅ ⋅ = (6.6)
El menor de los autovalores nos proporciona la carga crítica de pandeo crλ . Su
autovector es el modo de pandeo.
El problema de autovalores de la ecuación (6.6) se resuelve mediante alguno de
los procedimientos explicados en 6.1.2. Los autovectores están normalizados de manera
que el componente más grande es 1,0. Por tanto, las tensiones (cuando se calculan como
resultado del problema) deben ser interpretadas como una distribución relativa de
tensiones y no directamente como el estado tensional.
Una muestra del código que se introduce en Ansys para resolver el problema de
pandeo por autovalores se muestra en la figura 6.3:

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 77
Figura 6.3: “Código de Ansys para realizar el cálculo del problema de Pandeo por Autovalores”
Si el primer autovalor es negativo (lo cual indica que el pandeo se produce para
cargas aplicadas en el sentido opuesto), Ansys da un warning y el programa termina. En
el método del subespacio, se muestra un error “Number of stress-stiffness DOF is less
than requested modes”. Para evitar esta dificultad, aplicar un desplazamiento inicial de la
búsqueda (con el comando BUCOPT) hasta un valor próximo al autovalor esperado.
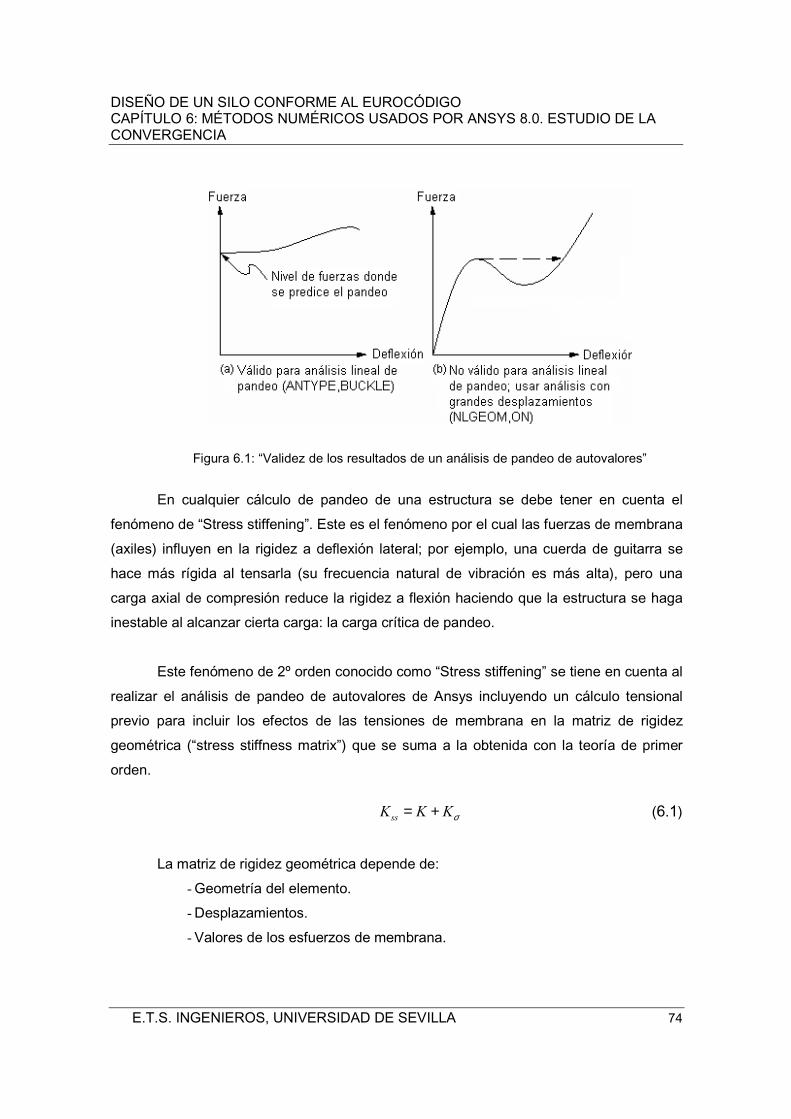
6.1.2. Problema de extracción de autovalores
Ansys dispone de varios métodos para la extracción de autovalores que se
enumeran en la tabla 6.1. Los que se usan en el análisis del pandeo de autovalores están
recuadrados en rojo en dicha tabla.
/SOLU !Debe haberse resuelto previamente un problema estático con PSTRES,ON ANTYPE,BUCKLE ! Análisis de pandeo
!por autovalores. BUCOPT,LANB,10 ! Define el método de !cálculo de autovalores y ! el nº de modos a calcular. MXPAND,1 ! Expande la forma !de los 10 modos calculados. SOLVE FINISH
DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 78
Tabla 6.1: “Métodos de extracción de Autovalores en Ansys 8.0”
ANSYS ofrece varios métodos para la obtención de autovalores y autovectores en
un sistema de N g.d.l.:
• REDUCED
– Emplea matrices reducidas, asociadas a una serie de g.d.l. maestros que el
usuario (o el propio ANSYS) debe seleccionar previamente. El proceso de
solución es más rápido que con las opciones SUBSPACE pero menos
exacto, ya que las matrices reducidas sólo permiten obtener una solución
aproximada.
• SUBSPACE
– Permiten obtener un determinado número M (reducido: M<<N) de
autovalores y autovectores. No resulta necesario definir g.d.l. maestros.
• BLOCK LANCZOS
– Válido en los mismos casos que Subspace, pero tiene una convergencia
más rápida. Aplicable en problemas de autovalores con matrices simétricas
grandes. Es el más eficiente en el caso de que haya autovalores próximos

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 79
(es el caso del pandeo por autovalores, por tanto es el método que
usaremos).
Como se ha mencionado anteriormente, los métodos de extracción de ecuaciones
más frecuentemente usados por Ansys en la extracción de autovalores del problema de
Pandeo de autovalores son el método del Subespacio y el de Block Lanczos y por ello los
veremos con más detenimiento.
Método del Subespacio
El método iterativo del subespacio (que se activa con el comando BUCOPT,SUBSP) se
describe con detalle en Bathe [5]. Las mejoras de este método sugeridas por Wilson e Itoh
[16] también se han incluido en Ansys. El algoritmo básico consiste en los siguientes
pasos:
1. Se define el pivote inicial s :
• En un análisis de pandeo (ANTYPE,BUCKLE), s SHIFT= en el comando
BUCOPT (su valor por defecto es 0,0).
2. Inicializar los vectores iniciales [ 0X ].
3. Triangularizar la matriz pivotada
[ ] [ ]*K K s M = + (6.7)
donde:
- [ ]K es la matriz de rigidez ensamblada.
- [ ]M es la matriz de masas (o de rigidez geométrica) ensamblada.
Se hace una comprobación de “secuencia de Sturm” si este es un punto de pivote
distinto del inicial y se ha requerido (mediante los comandos Strmck=ALL, que se usa
por defecto, o PART en el comando SUBOPT).
4. Para cada iteración n del subespacio (desde 1 hasta MN ), se repiten los pasos
del 5 al 14:

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 80
donde MN es el máximo número de iteraciones del subespacio (se pasa como
entrada en NUMSSI del comando SUBOPT).
5. Se forma [ ] [ ] [ ]1nF M X −= y se escala [ ]F por { }1nλ −
donde { }1nλ − son los autovalores previamente estimados.
6. Se resuelve para nX :
[ ]*nK X F = (6.8)
Estas ecuaciones se resuelven usando el frontal direct equation solver de Ansys
(EQSLV,FRONT) o el iterative PCG solver (EQSLV,PCG).
7. Se escalan los vectores nX por ( ){ }1 1n nsλ λ− −−
8. Se ortogonalizan los vectores a los vectores previamente convergidos
(Ortogonalización de Gram-Schmidt).
9. Se definen las matrices de subespacio K y M :
[ ]T
n nK X K X = (6.9)
[ ]T
n nM X M X = (6.10)
10. Se ajusta para el pivote *K K s M = +
11. Computar los autovalores y vectores del subespacio usando la iteración
generalizada de Jacobi:
[ ] [ ]{ }*nK Q M Q λ = (6.11)
donde:
- [ ]Q son los autovectores del subespacio.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 81
- { }nλ son los autovalores actualizados.
12. Actualizar la aproximación a los autovectores:
[ ] [ ]n nX X Q = (6.12)
13. Si se encuentra algún modo redundante o negativo, se eliminan y se crea un
nuevo vector aleatorio.
14. Se comprueba la convergencia (con la tolerancia definida por el analista en
Ansys):
• Si todos los modos requeridos convergen, ir al paso 15.
• Si se requiere un nuevo pivote (como se indica más abajo), ir al paso 3.
• Ir a la nueva iteración, paso 4.
15. Se realiza una comprobación de la secuencia de Sturm si se pide (Strmck=ALL,
por defecto en el comando SUBOPT).
Los pasos del 5 al 12 sólo se realizan en los vectores no convergidos: Una vez
que un autovalor ha convergido, el autovector asociado no se vuelve a iterar. El
procedimiento de ortogonalización de Gram-Schmidt (paso 8) asegura que los
autovectores que no han convergido permanezcan ortogonales a los vectores convergidos
sobre los que no se itera.
Método de Block Lanczos
El método de extracción de autovalores de Block Lanczos (es el algoritmo de
Lanczos por bloques al que se accede con el comando BUCOPT,LANB) está disponible
para problemas de gran tamaño de autovalores con simetría. Típicamente, este
solucionador es aplicable al tipo de problemas resolubles con el método de autovalores
del subespacio, pero consigue una tasa de convergencia más rápida.
El algoritmo de pivote por bloques de Lanczos , como se detalla en Grimes [17], es
la base teórica de este extractor de autovalores. El método usado por el análisis modal
emplea una estrategia de cambio de pivote automática, combinada con comprobaciones

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 82
de las secuencias de Sturm, para extraer el número de autovalores requerido. La
comprobación de las secuencias de Sturm, también asegura que se encuentra el número
de autovalores requeridos más allá de la frecuencia proporcionada por el analista como
pivote inicial (FREQE en el comando MODOPT) se encuentran sin obviar ningún modo.
El algoritmo de Block Lanczos es una variación del algoritmo de Lanczos clásico,
donde las recursiones de Lanczos se efectúan usando un bloque de vectores, en lugar de
un solo vector. Más detalles sobre el método clásico de Lanczos se pueden encontrar en
Rajakumar y Rogers [18].
El uso del método de Lanczos por bloques (o método Block Lanczos) para resolver
grandes modelos (100.000 gdl, por ejemplo) con muchas restricciones puede requerir una
cantidad de memoria del ordenador bastante significativa. Por esta razón, Ansys utiliza los
Multiplicadores de Lagrange para tratar las ecuaciones de restricción en el extractor de
Lanczos por bloques en lugar de eliminar dichas ecuaciones explícitamente antes de
escribir las matrices completas en el archivo de cálculo. Para más detalles sobre la
formulación de la teoría de los Multiplicadores de Lagrange ver Cook [19].
Comparación: Método de Block Lanczos vs Método del Subespacio
El Método de extracción de autovalores de Block Lanczos es el que usa Ansys por
defecto en el cálculo de pandeo por autovalores. Este método es tan preciso como el
Método del Subespacio y además es más rápido.
El método de Block Lanczos es especialmente potente cuando busca frecuencias
de autovalores en partes determinadas del espectro de autovalores de un sistema (en el
problema de pandeo de autovalores normalmente los autovalores están próximos entre
sí). La tasa de convergencia de las frecuencias de autovalores en las partes media y alta
del espectro es casi la misma que cuando se extraen los modos más bajos, por tanto,
cuando se usa una frecuencia dada como pivote (especificada en el comando FREQB)
para extraer n modos más allá de los hallados con el pivote inicial (valor inicial de
FREQB), el algoritmo extrae estos n modos adicionales prácticamente a la misma
velocidad que extrajo los n modos más bajos.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 83
Por su parte, el método del Subespacio es muy preciso debido a que usa las
matrices [ ]K y [ ]M completas, aunque precisamente esa sea la causa de que sea más
lento que el método Reducido o el de Block Lanczos. Por ello, el método del Subespacio
sólo se usa cuando sea necesaria una gran precisión o cuando no sea práctico
seleccionar g.d.l maestros (como se indicó anteriormente el método Reducido usa estos
g.d.l maestros).
A modo de resumen se muestra la tabla 6.2 en la que se comparan
esquemáticamente los distintos métodos de extracción de autovalores usados por Ansys y
que se han comentado en esta sección.
Tabla 6.2: “Comparación esquemática de varios extractores de autovalores de Ansys”
6.2. Pandeo No-lineal
6.2.1. Método de Newton-Raphson: Visión general
El proceso de discretización de los elementos finitos produce una serie de
ecuaciones simultáneas:
[ ]{ } { }aK u F= (6.13)

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 84
donde:
- [ ]K = Matriz de coeficientes
- { }u = Vector de incógnitas GDL (grados de libertad)
- { }aF = Vector de cargas aplicadas
Si la matriz de coeficientes [ ]K es ella misma función de los grados de libertad que
son incógnita (o de sus derivadas) entonces la ecuación (6.13) es una ecuación no lineal.
El método de Newton-Raphson es un proceso iterativo para resolver las ecuaciones
no lineales que puede ser escrito como (Bathe[5]):
{ } { } { }T a nri i iK u F F ∆ = − (6.14)
{ } { } { }1i i iu u u+ = + ∆ (6.15)
donde:
- TiK = Jacobiano de la matriz (matriz tangente)
- i = Subíndice que representa la iteración de equilibrio actual
- { }nriF = Vector de las fuerzas restauradoras correspondiente a las cargas
elementales internas
Ambos TiK y { }nr
iF se evalúan basándose en los valores dados por { }iu . La
parte derecha de la ecuación (6.14) es el residuo o vector de cargas desequilibradas; i.e.,
la cantidad en que el sistema esta fuera del equilibrio. En la figura 6.4 se describe
gráficamente la iteración i-ésima del algoritmo de Newton-Raphson aplicado a un
problema de un solo grado de libertad. En un análisis estructural, TiK es la matriz de
rigidez tangente, { }iu es el vector de desplazamientos y { }nriF es el vector de fuerzas
restauradoras calculado a partir de las tensiones elementales. En un análisis térmico,
TiK es la matriz de conductividad, { }iu es el vector de temperaturas y { }nr
iF es el
vector de cargas resistentes calculado a partir de los flujos de calor elementales. En un

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 85
análisis electromagnético, TiK es la matriz de Dirichlet, { }iu es el vector de potenciales
magnéticos y { }nriF es el vector de cargas resistentes calculado a partir de los flujos
magnéticos elementales. En un análisis transitorio, TiK es la matriz de coeficientes
efectiva y { }nriF es el vector de cargas efectivas aplicadas que incluye los efectos de
inercia y de amortiguamiento.
Como se puede observar en las siguientes figuras, se requiere más de una
iteración del método de Newton-Raphson para obtener una solución que converja. El
algoritmo general es como sigue:
1. Se supone{ }0u . { }0u es normalmente la solución convergida del “time
step” (paso de carga) previo. En el primer “time step”, { }0u = { }0 .
2. Calcular la matriz tangente modificada TiK y la carga restauradora { }nr
iF
a partir de la configuración de los { }iu .
3. Calcular { }iu∆ mediante la ecuación (6.14).
4. Añadir { }iu∆ a { }iu para obtener la nueva aproximación { }1iu + (ecuación
(6.15)).
5. Repetir los pasos desde el 2 al 4 hasta obtener la convergencia.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 86
Figura 6.4: "Solución de Newton-Raphson - Una iteración"
En la figura 6.5, se muestra la solución de la siguiente iteración ( )1i + a la del
ejemplo de la figura 6.4. Las iteraciones subsecuentes se realizarían de una manera
análoga.
La solución obtenida al final del proceso iterativo correspondería al nivel de carga
{ }aF . La solución final convergida estaría en equilibrio, de forma que el vector de cargas
restauradoras { }nriF (computado a partir del estado actual de tensiones, flujos de calor…)
igualaría al vector de cargas aplicadas { }aF (o al menos estaría dentro de cierta
tolerancia). Ninguna de las soluciones intermedias estaría en equilibrio. Cada uno de
estos pasos intermedios se denomina “iteración de equilibrio” (equilibrium iteration) en
Ansys.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 87
Figura 6.5: "Solución de Newton-Raphson - Siguiente iteración"
Si el análisis incluye no linealidades dependientes de la trayectoria (como por
ejemplo plasticidad), entonces el proceso de solución requiere que ciertos pasos
intermedios estén en equilibrio para poder seguir correctamente la trayectoria de carga.
Esto se consigue, efectivamente, especificando un análisis incremental paso a paso; i.e.,
el vector final de carga { }aF se alcanza aplicando la carga en incrementos y aplicando las
iteraciones de Newton-Raphson en cada paso:
{ } { } { }, , ,T a nrn i n i n n iK u F F ∆ = − (6.16)
donde:
- ,Tn iK = Matriz tangente para el paso n, y la iteración i.
- { }anF = Vector de fuerzas totales aplicadas en el paso n.
- { },nrn iF = Vector de las fuerzas restauradoras para el paso n, y la iteración i.
Cada paso se denomina “paso de carga” (load step) en Ansys. Además cada paso
de carga puede subdividirse a su vez en “sub-pasos de carga” (substeps) en Ansys, al
final de los cuales también se alcanza el equilibrio. Este proceso es el “Procedimiento
Incremental de Newton-Raphson” y se muestra en la figura 6.6. El procedimiento de
Newton-Raphson garantiza la convergencia, si y solo si la solución en cualquier iteración
{ }iu esta “cerca” de la solución exacta. Por tanto, incluso de no haber presente una no

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 88
linealidad dependiente de la trayectoria, la aproximación incremental (i.e., aplicando las
cargas en incrementos mas pequeños) es a veces necesaria para obtener una solución
que se corresponda con el nivel final de carga.
Figura 6.6: “Procedimiento Incremental de Newton-Raphson”
Cuando la matriz de rigidez se recalcula en cada iteración (como se indica en la
ecuación (6.14) y en la ecuación (6.16)) el proceso se denomina “procedimiento de
solución completa de Newton-Raphson” (Full Newton-Raphson solution procedure), en
Ansys: ( NROPT,FULL o NROPT,UNSYM). Alternativamente, la matriz de rigidez podría
ser recalculada con menor frecuencia usando el “Procedimiento Modificado de Newton-
Raphson”, en Ansys: (NROPT,MODI). Especialmente, para análisis estáticos o
transitorios, se recalcularía sólo durante la primera o la segunda iteración de cada
subpaso, respectivamente. El uso del “Procedimiento de Rigidez Inicial”, en Ansys:
(NROPT,INIT), previene cualquier actualización o recálculo de la matriz de rigidez, como
se muestra en la figura 6.7. Si existiese un elemento “multistatus” en el modelo, sin
embargo, la matriz de rigidez sería recalculada en la iteración en la cual se cambiara de
estado independientemente de la opción de Newton-Raphson que se haya usado. Los
procedimientos modificado y de rigidez inicial de Newton-Raphson, convergen más
lentamente que el procedimiento de solución completa de Newton-Raphson, pero
requieren menos reformulaciones e inversiones matriciales. Unos pocos elementos
forman una matriz de rigidez tangente aproximada por lo que las características de
convergencia son en cierto modo diferentes.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 89
Figura 6.7: “Rigidez-Inicial Newton-Raphson”
6.2.2. Convergencia
El proceso iterativo descrito en la sección anterior continúa hasta que se consigue
la convergencia.
Se asume que hay convergencia cuando:
{ } R refR Rε< (Convergencia residual) (6.17)
y/o:
{ }i u refu uε∆ < (Convergencia incremental de los GDL) (6.18)
donde { }R es el vector residual:
{ } { } { }a nrR F F= − (6.19)

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 90
que es el término de la derecha de la ecuación de Newton-Raphson(6.14). { }iu∆ es el
vector de incrementos de los GDL, Rε y uε son tolerancias (TOLER en el comando
CNVTOL de Ansys) y refR y refu son valores de referencia (VALUE en el comando
CNVTOL de Ansys). • es la norma de un vector; esto es, una medida escalar de la
magnitud del vector (más adelante se definen los tres tipos de norma que usa Ansys).
La convergencia, por tanto, se obtiene cuando la norma del residuo (desequilibrio)
es menor que una tolerancia multiplicada por un valor de referencia y/o cuando el tamaño
de los incrementos de los GDL es menor que una tolerancia multiplicada por un valor de
referencia. Por defecto, el programa Ansys sólo comprueba la convergencia residual, la
de la ecuación (6.17). El valor por defecto de las tolerancias es 0,001 (tanto para Rε como
para uε ).
Hay tres normas disponibles entre las que elegir (NORM en el comando CNVTOL
de Ansys):
1. Norma infinita: { } max iR R∞
=
2. Norma L1: { }1 iR R=∑
3. Norma L2: { } ( )1
2 22 iR R= ∑
Para la convergencia incremental de los GDL, basta con sustituir u∆ porR en las
anteriores ecuaciones.
La norma infinita es simplemente el máximo valor en el vector (máximo residuo o
máximo incremento de GDL), la norma L1 es la suma de los valores absolutos de los
términos, y la norma L2 es la raíz cuadrada de la suma de los cuadrados (SRSS) de los
valores de los términos, también llamada norma Euclídea. Por defecto se usa la norma
L2.
DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 91
El valor por defecto de referencia de residuo refR es { }aF . Para los GDL con
condiciones de contorno de desplazamientos impuestos, los { }nrF en esos GDL se usan
para computar refR . Para GDL estructurales, si { }aF cae por debajo de 1,0, entonces
refR toma 1,0 como valor. Esto ocurre a menudo en análisis del movimiento de cuerpos
rígidos (por ej., rotación libre). Para GDL térmicos, si { }aF cae por debajo de 1,0E-6,
entonces refR toma 1,0E-6 como valor. Para el resto de GDL, refR toma el valor 0,0. El
valor por defecto de referencia de refu es { }u .
El número máximo de ecuaciones de equilibrio permitidas, N en cada subpaso,
se fija con el comando NEQIT. Si después de realizar NEQIT iteraciones de equilibrio sin
alcanzar la convergencia, Ansys da un mensaje de error y termina el cálculo.
DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 92
6.2.3. Variaciones del método de Newton-Raphson y opciones que usa el
programa
Predictor
La solución usada para el comienzo de cada paso de carga n { },0nu es
generalmente igual a la solución actual de GDL { }1nu − . La matriz de rigidez tangente
,0nK y la carga restauradora { },0nF se basan en esta configuración. La opción
“predictor” de Ansys (comando PRED), extrapola la solución de GDL usando la historia
previa para una mejor estimación de la siguiente solución.
En análisis estáticos, la predicción se basa en usar los incrementos de los
desplazamientos acumulados sobre el paso de carga previo, multiplicados como factor
por el tamaño del paso de carga para hallar el { },0nu :
{ } { } { },0 1n n nu u uβ−= + ∆ (6.20)
donde:
- { }nu∆ = Incremento del desplazamiento acumulado sobre el paso de carga
previo.
- n = Paso de carga actual.
{ } { }1
NEQIT
n ii
u u=
∆ = ∆∑ (6.21)
β se define como:
1
n
n
t
tβ
−
∆=∆
(6.22)
donde:
- nt∆ = Tamaño del paso de carga actual.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 93
- 1nt −∆ = Tamaño del paso de carga precedente.
No se permite que β sea mayor que 5.
En análisis transitorios, la predicción se basa en las velocidades y aceleraciones
actuales usando las fórmulas de Newmark para GDL estructurales:
{ } { } { } { } 2,0 1 1 1
12n n n n n nu u u t u tα− − − = + ∆ + − ∆
! !! (6.23)
donde: - { } { } { }1 1 1, ,n n nu u u− − −! !! = Desplazamientos, velocidades y aceleraciones actuales.
- nt∆ = Tamaño de paso de carga actual.
- α = Parámetro de Newmark (se introduce con el comando TINTP).
Para sistemas térmicos, magnéticos y otros sistemas de primer orden, la predicción
se basa en la fórmula trapezoidal:
{ } { } ( ){ },0 1 11n n n nu u u tθ− −= + − ∆! (6.24)
donde: - { }1nu − = Temperaturas actuales (o potenciales magnéticos).
- { }1nu −! = Tasas actuales de estas cantidades.
- θ = Parámetro de tiempo de integración trapezoidal (se introduce con el
comando TINTP).
Las subsecuentes iteraciones de equilibrio proporcionan los incrementos de los
GDL { }u∆ con respecto a los valores predichos de los mismos { },0nu , de ahí que este sea
un algoritmo predictor-corrector.
Descenso Adaptativo
El descenso adaptativo (Adptky en el comando NROPT) es una técnica que
cambia a una matriz “más rígida” si se encuentran dificultades de convergencia, y vuelve

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 94
a cambiar a la matriz de rigidez tangente completa al converger la solución, dando como
resultado una tasa de convergencia más rápida, lo que es una ventaja. (Eggert [6]).
La matriz usada en la ecuación de Newton-Raphson, (ecuación(6.14)) se define
como la suma de dos matrices:
( )1T S TiK K Kξ ξ = + − (6.25)
donde:
- SK = Matriz secante (o más estable).
- TK = Matriz tangente.
- ξ = Parámetro de descenso.
El programa ajusta el parámetro de descenso ( )ξ adaptándolo durante las
iteraciones de equilibrio de la siguiente manera:
1. Empieza cada substep (subpaso) usando la matriz tangente ( )0ξ = .
2. Observa el cambio en el residuo { }2
R en las iteraciones de equilibrio:
Si aumenta (indicando una posible divergencia):
• Elimina la solución actual si 1ξ < , establece 1ξ = y rehace la
iteración usando la matriz secante.
• Si ξ ya es igual a 1, continua iterando.
Si decrece (indicando una solución convergente):
• Si 1ξ = (matriz secante) y el residuo ha decrecido en tres
iteraciones seguidas (o 2 si ξ se incrementó a 1 durante el
proceso de iteración de equilibrio por el caso arriba indicado),
entonces se reduce ξ por un factor de 1/4 (estableciéndolo en
0,25) y se continúa iterando.
• Si 1ξ < , se vuelve a disminuir por un factor de 1/4 y se
continúa iterando. Una vez que ξ sea menor que 0,0156, se
toma 0,0ξ = (se usa la matriz tangente).

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 95
3. Si se encuentra un mensaje de “pivote negativo” (lo cual indica un matriz mal
condicionada):
• Si 1ξ < , se elimina la solución actual, se toma 1ξ = y se
rehace la iteración usando la matriz secante.
• Si 1ξ = , se bisecta el paso de carga si el comando “automatic
time stepping” está activado, en caso de que no lo esté se
termina la ejecución.
Las no linealidades que hacen uso del descenso adaptativo (esto es, que forman
una matriz secante si 0ξ > ) incluyen: plasticidad, contacto, rigidez de tensiones con
grandes deformaciones, campos magnéticos no lineales que usan la formulación potencial
escalar, el elemento concreto SOLID65 con el KEYOPT(7) = 1, y el elemento de
membrana laminar SHELL41 con el KEYOPT(1) = 2. El descenso adaptativo se usa por
defecto en estos casos a no ser que las opciones de “búsqueda lineal” o “arc-length”
estén activadas. Sólo está disponible con el “Procedimiento de solución completa de
Newton-Raphson”, en el que la matriz se recalcula en cada iteración. El “Procedimiento de
solución completa de Newton-Raphson” es también el que se usa por defecto para
plasticidad, contacto y no linealidades debidas a grandes deformaciones.
Búsqueda Lineal
La opción de búsqueda lineal (a la que se accede con el comando LNSRCH) trata
de mejorar una solución de Newton-Raphson { }iu∆ escalando el vector solución por un
valor escalar denominado el “Parámetro de búsqueda lineal”.
Considerando la ecuación (6.15) de nuevo:
{ } { } { }1i i iu u u+ = + ∆ (6.26)

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 96
En algunas situaciones de la solución, el uso del { }iu∆ completo conduce a
inestabilidades de la solución. De ahí que, si se usa la opción de la búsqueda lineal, la
ecuación (6.26) sea modificada para escribirse:
{ } { } { }1i i iu u s u+ = + ∆ (6.27)
donde: - s = Parámetro de búsqueda lineal; 0,05 1,0s< < .
s se determina automáticamente minimizando la energía del sistema, lo que se
reduce a encontrar el cero de la ecuación no lineal:
{ } { } { }( ){ }( )T a nrs i ig u F F s u= ∆ − ∆ (6.28)
donde: - sg = Gradiente de la energía potencial con respecto a s .
Un esquema de resolución iterativa basado en el “Método de Regula Falsi” (el cual,
nos permite encontrar la raíz de la ecuación f(x)=0, donde f(x) es una función continua
definida en el intervalo [a,b], con f(a) y f(b) de signos diferentes)se usa para resolver la
ecuación (6.28) (Schweizerhof y Wriggers [7]). Las iteraciones continúan hasta que:
1. sg sea menor que 00,5g , donde 0g es el valor de la ecuación (6.28)
en 0,0s = (esto es, usando { }1nrnF − en lugar de { }( ){ }nrF s u∆ .
2. sg no cambie significativamente entre iteraciones.
3. Se hayan ejecutado 6 iteraciones.
Si 0,0sg > , no se realiza ninguna iteración y s se toma como 1,0. No se permite
un smenor de 0,05.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 97
La solución escalada { }iu∆ se usa para actualizar los valores actuales de los GDL
{ }1iu + en la ecuación (6.15), que se ejecutan en la siguiente ecuación de equilibrio.
6.2.4. Método del Arc-Length
Los análisis con detalle de estructuras geométricamente no lineales requieren la
creación de modelos matemáticos que incluyan con precisión las condiciones específicas
de carga y soporte; y, aun más importante, que modelen la rigidez y la respuesta dada por
la estructura.
La principal característica del pandeo no lineal frente al pandeo de autovalores que
calcula Ansys, es que el fenómeno de pandeo no lineal es capaz de resolver una región
de inestabilidad durante la trayectoria de post-pandeo, mientras que el pandeo de
autovalores sólo incluye el comportamiento lineal de la región de pre-pandeo hasta la
bifurcación (punto de carga crítica). Esto se ilustra en la figura 6.8. En dicha figura
también se observa que cuando se realiza el análisis no lineal, más ajustado a la realidad,
el pandeo comienza a una carga crítica menor a la obtenida con un análisis lineal o, como
lo llama Ansys, con un cálculo de pandeo de autovalores.
Figura 6.8: ”Comportamiento de Pandeo No lineal vs Pandeo de autovalores”

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 98
Las estructuras geométricamente no lineales contienen a menudo puntos límite en
los cuales la trayectoria de equilibrio tiene tangente horizontal, como se observa en la
figura 6.8. La región comprendida entre dos puntos críticos es inestable, porque la recta
tangente a la trayectoria de equilibrio es negativa, lo que indica un aumento de los
desplazamientos al disminuir las cargas. Si el proceso de carga se hace sin control en
desplazamientos, como es habitual (salvo en ensayos de laboratorio), cuando la carga
crece superando el primer punto límite, la estructura sufre un “salto” brusco de
desplazamientos, que la llevan a una nueva situación estable, como se muestra en la
figura 6.9. A este fenómeno se le denomina “snap-through”.
Figura 6.9: “Fenómenos de snap-through y snap-back. Respuesta en carga y descarga”
Al descargar esta estructura, cuando la carga cae por debajo del segundo punto
límite, se produce otro salto brusco de desplazamientos que se denomina “snap-back”. El
fenómeno de “snap-through” se ilustra muy bien en el caso del arco rebajado cargado
puntualmente de la figura 6.10.
Figura 6.10: ”Snap Through en el Pandeo”

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 99
La presencia de puntos críticos de estabilidad y trayectorias de equilibrio
inestables son las principales dificultades que las soluciones numéricas deben superar
para capturar completamente la respuesta no lineal. Aun existen ciertos obstáculos para
encontrar respuestas no lineales de estructuras sometidas a grandes cambios
geométricos. Predecir “snap-through” y “snap-back” de ciertas estructuras es difícil y
resulta computacionalmente costoso. También es difícil hallar cuánta carga adicional
puede soportar con seguridad una estructura bajo estas circunstancias.
El método del “arc-length” se presenta como el adecuado para predecir la
respuesta correcta de estructuras con comportamientos complejos del tipo “snap-through”
y seguir la trayectoria de equilibrio no lineal a través de los puntos límite.
Introducción
Las estructuras pueden experimentar condiciones de carga que causen grandes
desplazamientos que cambien de forma significativa su geometría y requieran, por tanto,
que las ecuaciones de equilibrio se planteen en la geometría deformada.
Las grandes deflexiones son descritas por ecuaciones diferenciales no lineales
que pueden ser resueltas usando técnicas incrementales, como el Método de Newton-
Raphson anteriormente presentado. En análisis no lineales la matriz de rigidez tangente
sustituye a la matriz de rigidez que se usa en los análisis lineales. Se usan pasos de
carga iterativos para aplicar la carga a la estructura en forma de pequeñas cargas
incrementales y hallar cada vez los correspondientes desplazamientos incrementales. La
representación de estos resultados define la curva de la trayectoria de equilibrio de la
estructura bajo las cargas aplicadas.
Una estructura que sufra grandes cambios en su geometría a menudo presenta
puntos límite con una respuesta inestable de “saltos” (“snap-through” y “snap-back”)
durante un colapso estático. La solución a estas inestabilidades estructurales es difícil de
hallar con los métodos comunes de resolución de ecuaciones, tales como el método de
Newton-Raphson. Estos métodos fallan cuando tengan lugar comportamientos de “snap-
back” a lo largo de la trayectoria de carga. Esto sucede porque debido a la naturaleza de

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 100
la ecuación empleada en el método iterativo de Newton-Raphson, es decir, la ecuación
(6.14), no puede haber convergencia si la matriz de rigidez tangente (la pendiente de la
curva fuerza-desplazamiento en cualquier punto) se hace cero. Ver figura 6.11.
Figura 6.11:”Divergencia en el Método de Newton-Raphson”
Los investigadores han estudiado continuamente estos problemas y se han
obtenido mejoras en el proceso que han sido gradualmente introducidas en los programas
comerciales de elementos finitos. El análisis geométricamente no lineal llevado a cabo
mediante elementos finitos debe ser capaz de hallar todas las posibles respuestas
durante la aplicación de grandes cargas.
Pasar puntos críticos durante la respuesta geométricamente no lineal es retador.
Dos tipos de puntos críticos hallados en este tipo de comportamiento son:
- Puntos límite de carga que se alcanzan cuando la trayectoria de la respuesta
tiene un “snap-through” local;
- Y puntos límite de control que definen un “snap-back” local. En uno de estos
puntos límite de control, la carga puede cambiar de dirección al cambiar las
deflexiones cuando se atraviesa un máximo local.
Existe una familia importante de métodos de resolución de ecuaciones no lineales
llamados genéricamente métodos del “arc-length” (longitud del arco) que pueden superar
estos puntos críticos. El método general del “arc-length” usado para análisis estructurales,

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 101
surge como una variación del método general de Newton-Raphson ideada para superar
las dificultades de éste para pasar por puntos críticos. Fué desarrollado originalmente por
Riks (1972; 1979) y Wempner (1971) [10]. La técnica se asemeja mucho al método de
Newton-Raphson descrito en Riks [8] y [9] excepto en que en este caso el incremento de
carga aplicado pasa a ser una incógnita adicional en el problema.
No son pocas las variaciones que se desarrollaron sobre el trabajo original de Riks
y Wempner. De hecho la forma del método del arc-length que usa el programa Ansys 8.0.
para resolver ecuaciones no es la de Riks y Wempner sino la variación del método
introducida por Forde y Stiemer [11] en 1987. Por este motivo y, dado que no es el
objetivo de este proyecto hacer un análisis demasiado exhaustivo de la gran cantidad de
métodos del “arc-length” de resolución de ecuaciones no lineales, se presentarán sólo
dos: el planteamiento de Riks y Wempner, por ser la primera históricamente y base de las
demás, y la forma de Forde y Stiemer, usada por Ansys.
Análisis estático geométricamente no lineal mediante el método del “Arc-
Length” de Riks-Wempner
En el método de Riks-Wempner la longitud de un vector tangente a la trayectoria
de equilibrio se usa para hallar un nuevo punto que es intersección del plano normal a la
tangente. Una carga dada por el analista estimará las magnitudes del incremento inicial
de carga para cada paso. Se llega a la terminación del método cuando se cumplen las
condiciones de máximo factor proporcional de carga o máximo desplazamiento nodal
dados. El proceso también se acaba cuando se alcanza el máximo número de
incrementos de carga en un paso determinado.
El método del arc-length de Riks-Wempner traza la trayectoria no lineal de
equilibrio usando un proceso iterativo que empieza computando los desplazamientos
iniciales provocados por un incremento de carga dado. El método pasa a hallar el nuevo
punto de equilibrio desde el punto inicial; i, como se puede apreciar en la figura 6.12.
(Para mas detalle consultar Crisfield [12], Owen [13] y Riks [8] y [9]).
En la figura 6.12 se muestra la curva carga-desplazamiento para un sistema de un
solo grado de libertad. El vector tangente a la curva en i puede escribirse como:

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 102
ii
i
ut
λ ∆= ∆
"" (6.29)
donde iλ∆ es la carga incremental aplicada en i, iT
K es la matriz de rigidez tangente
evaluada en i y iu∆" es el vector incremental de desplazamiento hallado resolviendo
iT i iK u Fλ∆ = ∆
"" (6.30)
El vector normal, in
" también se muestra en la figura 6.12 y se puede expresar
como:
ii
i
un
λ ∆= −∆
"" (6.31)
Figura 6.12: “Método del arc-length de Riks-Wempner”

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 103
Figura 6.13: “Inicio del método del arc-length de Riks-Wempner”
Al comenzar el método del “arc-length” de Riks-Wempner un incremento inicial de
carga, 0λ∆ , se usa para computar el primer vector desplazamiento, 0u∆ " , y la longitud del
primer vector tangente 0t"
. Estas variables se muestran en la representación de carga –
desplazamiento de la figura 6.13. Para hallar los desplazamientos iniciales, 0u∆" , se usan
triángulos semejantes. Durante este incremento inicial la rigidez tangente es la misma que
la rigidez lineal. El incremento de carga es un parámetro dado por el analista que divide la
carga total aplicada en incrementos iguales. Un incremento de carga dado empieza el
proceso y a partir de él se hallan los desplazamientos 0u∆ usando la matriz de rigidez
tangente0T
K . Los desplazamientos iniciales 0u∆ se hallan resolviendo
0
0 totu u
λ λ∆ =∆ ∆" " (6.32)
donde 1λ = y totu∆" se deduce de la expresión
0T totK u Fλ∆ =
"" (6.33)
La longitud del vector tangente 0t
", que será la que determine el radio del arc-
length, a lo largo de la trayectoria de equilibrio se puede calcular como
20 0 0 0
Ts t t u uλ∆ = ⋅ = ∆ + ∆ ∆" " " "
(6.34)

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 104
A través del resto de iteraciones la longitud de arco (arc-length) es constante o
puede ser escalada por la introducción de un parámetro por parte del analista en la
siguiente expresión
12
11
desi i
i
Is s
I−−
∆ = ∆
(6.35)
El analista decide sobre el número de iteraciones requeridas, 1iI − , y sobre el
número de iteraciones deseadas, desI .
Método del arc-length usado por Ansys
El método del arc-length usado por Ansys (que se activa con el comando
ARCLEN,ON) es apropiado para soluciones no lineales estáticas de problemas
inestables. Este método usa iteraciones esféricas explícitas para mantener la
ortogonalidad entre el radio del arc-length y las direcciones ortogonales, como se describe
en Forde y Stiemer (1987). Se asume que todas las magnitudes de carga están
controladas por un único parámetro escalar (i.e., el factor de carga total).
Al ser este un método “quasi-Newton” todas las opciones en el programa del
método de Newton-Raphson son aún la base de la solución del arc-length.
Ya que ahora, los vectores de desplazamiento y el factor escalar de carga se
tratan como incógnitas, el método del arc-length es él mismo un método que automatiza
los tamaños de los pasos de carga (No necesitará el comando AUTOTS,ON). Para
problemas con giros bruscos en la curva carga-desplazamiento o materiales dependientes
de la trayectoria de carga, es necesario limitar el radio del arc-length (el tamaño del
incremento de carga del arc-length) usando el radio inicial o de referencia (con el
comando NSUBST) y el rango de variación permitido. Durante la solución, el método del
arc-length variará el radio del mismo en cada substep (subpaso) de acuerdo con el grado
de no linealidades que estén incluidas.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 105
El rango de variación del radio del arc-length se limita por los multiplicadores
máximo y mínimo del radio de referencia del arc-length (MAXARC y MINARC en el
comando ARCLEN).
En el procedimiento de resolución del método del arc-length usado por Ansys, la
ecuación no lineal (6.14), se replantea asociada al factor de carga total λ :
{ } { } { }T a nri i iK u F Fλ ∆ = − (6.36)
donde λ está comprendido normalmente en el rango 1,0 1,0λ− ≤ ≤ . Es interesante
recalcar que el factor de carga λ sólo multiplica a las fuerzas aplicadas, ya que el otro
término de fuerzas son las fuerzas internas que se calculan a partir de las aplicadas. Si
escribimos el factor proporcional de carga λ de forma incremental, tenemos en el substep
n y la iteración i (ver figura 6.14):
{ } { } ( ){ } { } { }T a a nri i n i i iK u F F F Rλ λ λ ∆ − ∆ = + − = − (6.37)
donde:
- λ∆ = Factor de carga incremental (tal y como se muestra en la figura 6.14).
Figura 6.14: ”Aproximación mediante el arc-length de Forde-Stiemer con el método completo de Newton-Raphson”

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 106
El desplazamiento incremental { }iu∆ puede escribirse en dos partes siguiendo la
ecuación(6.37):
{ } { } { }' ''i i iu u uλ∆ = ∆ ∆ + ∆ (6.38)
donde:
- { }'iu∆ = Desplazamiento debido a un factor de carga unidad.
- { }''iu∆ = Desplazamiento incremental proveniente del método convencional de
Newton-Raphson.
Estos se definen:
{ } { }1' T ai iu K F
− ∆ = (6.39)
{ } { }1'' Ti i iu K R
− ∆ = − (6.40)
En cada iteración del arc-length, es necesario usar las ecuaciones (6.39) y (6.40)
para resolver { }'iu∆ y { }''iu∆ . Además, al haber introducido una nueva incógnita en el
problema, el factor de carga incremental λ∆ , el método introduce una nueva restricción
para cada substep que se conoce como la “ecuación del arc-length” que puede ser
escrita, por ejemplo, en la iteración i (ver figuras 6.14 y 6.15)(es equivalente a la ecuación
(6.34) del método de Riks-Wempner)
{ } { }2 2 2 T
i i n nu uλ β= + ∆ ∆# (6.41)
donde: - β = Factor de escala (con unidades de desplazamiento-1) usado para asegurar
el correcto escalamiento en las ecuaciones (ya que λ es adimensional).
- nu∆ = Suma de todos los desplazamientos incrementales iu∆ de esta iteración.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 107
Así el método de Forde-Stiemer usado por Ansys puede verse más claramente en
la figura 6.15.
Figura 6.15: ”Método del arc-length de Forde-Stiemer. Un substep”
El radio del arc-length i# se fuerza, durante las iteraciones de un mismo substep,
a ser idéntico al radio 1# de la primera iteración de ese substep, es decir, se impone que
se mantenga constante a lo largo de un substep dado.
1 1...i i−= = =# # # (6.42)
Por lo tanto el método del arc-length de Forde-Stiemer que usa Ansys permite a la
carga y al desplazamiento que varíen durante un substep o subpaso de carga tal y como
se muestra en la figura 6.16.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 108
Figura 6.16: ”Comportamiento de la convergencia en Ansys usando el arc-length”
El radio del arc-length 01# en la primera iteración del primer substep de un paso de
carga o load step se denomina “radio inicial o de referencia del arc-length” (definido por el
comando NSUBST ya que este radio de referencia se calcula como el cociente entre la
carga total aplicada en el paso de carga correspondiente y el número de substeps
especificados en dicho comando para ese mismo paso de carga). Los radios del arc-
length en los substeps subsiguientes del mismo paso de carga o load step son calculados
por el programa a partir del radio del arc-length del substep previo y el comportamiento de
la solución y teniendo en cuenta que estos radios deben estar comprendidos dentro del
rango límite que determinan el radio de referencia para ese paso de carga y los
multiplicadores del mismo (dados en las etiquetas MAXARC y MINARC del comando
ARCLEN). Para el método del arc-length, por tanto, no se usa el “Automatic time
stepping”.
0 01 1iMINARC MAXARC⋅ ≤ ≤ ⋅# # # (6.43)
Las ecuaciones (6.38) y (6.41) conjuntamente, determinan, ellas solas, el vector
solución ( ),T
iu λ∆ ∆ . Sin embargo, hay muchas formas de resolver λ∆ aproximadamente.
El método de la iteración esférica explícita se usa para asegurar la ortogonalidad (Forde y
Stiemer (pág.174 del libro indicado en la bibliografía)). En este método, el residuo

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 109
requerido ir (un escalar) para la iteración explícita en una esfera, se calcula de antemano
como producto escalar de los vectores normal in"
y tangencial it"
. Los autores sugieren la
selección de un vector normal in"
con una dirección arbitraria con respecto al vector it"
que
es tangente a la configuración de carga-desplazamiento en un punto dado. Los vectores
normal y tangencial constan de m componentes provenientes del vector desplazamiento y
una proveniente del factor de carga. Estas componentes se combinan usando el factor
escalar β formando vectores de m+1 componentes que pueden escribirse como:
ii
i
ut
βλ
=
"" (6.44)
i
un
β λ∆
= ∆
""
(6.45)
Por consiguiente, el factor de carga incremental del arc-length se determina
mediante la fórmula:
{ } { }
{ } { }''
2 '
T
i n i
T
i n i
r u u
u uλ
β λ
− ∆ ∆∆ =
+ ∆ ∆ (6.46)
Esta expresión puede ser simplificada para casos particulares de ortogonalidad. El
método funciona bien incluso cuando se encuentra en las proximidades de puntos críticos
en los que hay cambios bruscos en la solución. Finalmente, reseñar que los vectores
solución se actualizan de acuerdo con (ver figuras 6.14 y 6.15):
{ } { } { } { }1i n n iu u u u+ = + ∆ + ∆ (6.47)
y
1i n iλ λ λ λ+ = + + ∆ (6.48)
donde:
- n = Número del substep actual.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 110
Los valores de nλ y λ∆ están disponibles en el módulo POST26 (comando SOLU)
y se corresponden con las etiquetas ALLF y ALDLF, respectivamente. El radio
normalizado del arc-length se encuentra en la etiqueta ARCL (comando SOLU) y se
corresponde con el valor 0i
i
##
, donde 0i# es el radio inicial o de referencia del arc-length en
el substep i definido en el comando NSUBST, y que se relaciona con el factor de carga y
los desplazamientos a través de la ecuación (6.41).
En el caso en el que las cargas aplicadas sean mayores o menores que las
máximas o mínimas cargas críticas, el arc-length continuará con las iteraciones en ciclos
ya que λ no se acerca a la unidad. Es recomendable, por tanto, acabar con las
iteraciones del arc-length imponiendo un criterio de terminación (puede hacerse usando
los comandos ARCTRM o NCNV).
6.3. Resumen
Una vez presentada la base teórica de los métodos de resolución de ecuaciones
que usa Ansys y visto con más detalle el Método del Arc-length, convendría enumerar los
puntos más importantes que se han presentado en este capítulo, haciendo hincapié sobre
todo en aquellos que resulten más prácticos desde el punto de vista operativo en la
resolución del problema no lineal planteado.
En este pequeño resumen, se incluyen una serie de consejos prácticos,
provenientes de bibliografía diversa, analistas y de la propia ayuda del programa, que
orientan sobre cómo realizar un análisis no lineal en Ansys.
• En análisis no lineales es muy recomendable aplicar la carga en forma de
incrementos (pasos de carga o load steps) para poder seguir bien la trayectoria de la
curva carga-desplazamiento.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 111
• El método de resolución numérica de ecuaciones más usado por su sencillez y
antigüedad es el “Método iterativo de Newton-Raphson” base de casi todos los demás y
que se describe en la ecuación (6.16): { } { } { }, ,T a nrn i i n n iK u F F ∆ = − .
• En análisis no lineales en los que se esperen comportamientos de “snap
through” y “snap back” o en los que se quiera trazar la trayectoria de la solución en la
región de post-pandeo, el método de Newton-Raphson antes mencionado presenta
problemas debido a la existencia de puntos críticos de pendiente horizontal en los que se
anula la matriz de rigidez. En estos casos es aconsejable usar el Método del Arc-length
que puede pasar bien esos puntos críticos. Una comparativa ilustrativa de ambos
métodos puede observarse en la figura 6.17.
Figura 6.17:”Newton-Raphson vs Arc-length”.
• El método del arc-length que usa Ansys es la forma de Forde y Stiemer del
mismo (puede observarse en las figuras 6.14 y 6.16).
• El procedimiento básico de resolución del problema usando el método del arc-
length en Ansys puede resumirse en los siguientes pasos:
- El método se activa con el comando ARCLEN,ON.
- La carga se aplica a la estructura incrementalmente a través de una serie de
pasos de carga o load steps siendo la carga aplicada en cada uno de ellos un
valor definido por el analista. A su vez cada paso de carga se resuelve a través
de un número de subpasos de carga o substeps que se determinan a través

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 112
del comando NSUBST. Los substeps se resuelven mediante una serie de
iteraciones que siguen hasta que: la solución converja en el substep
determinado (ya que se impone que la solución esté en equilibrio en cada
substep) o bien se sobrepase sin converger el número máximo de iteraciones
permitidas en un substep dado por el comando NEQIT.
- El “radio del arc-length de referencia” es el radio del arc-length de la primera
iteración del primer substep de un paso de carga (en realidad es el radio de
todo el primer substep porque Ansys impone que el radio sea constante en las
iteraciones de un mismo substep). Este radio lo define el analista mediante el
comando NSUBST y la carga que aplica en el “loadstep” ya que se calcula con
la expresión:
0 " " " " i
Fracción de la carga total aplicada en el LS
Número de substeps del LS definidos en NSUBST=# (6.49)
- Los radios de los siguientes substeps, ya no los define directamente el
analista, si no que Ansys los calcula basándose en el radio del arc-length del
substep previo y el comportamiento no lineal de la solución. Ahora bien, el
analista determina el rango en el que se moverán estos valores imponiendo
límites de variación al radio del arc-length de referencia (que por tanto sirve
como referencia para el tamaño del resto de los radios del mismo paso de
carga) a través de las etiquetas MAXARC y MINARC del comando ARCLEN.
Los límites de variación del radio del arc-length en los substeps de un loadstep
determinado son:
01*Límite inferior MINARC= # (6.50)
01*Límite superior MAXARC= # (6.51)
donde 0
1# es el radio de referencia del arc-length (el del primer substep) para
ese paso de carga.
- Cada paso de carga o loadstep, se resuelve de la manera indicada hasta que:
La solución converja.

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 113
Se alcance alguna de las condiciones de salida del análisis del
programa que pueden especificarse en muchos comandos pero
sobre todo en: ARCTRM, NEQIT o NCNV. (Si la solución no
consigue converger en el número de iteraciones de equilibrio
indicadas en NEQIT, el programa bisectará automáticamente el
radio del arc-length y continuará con el análisis. La bisección
continuará hasta que se obtenga una solución convergida o se
alcance el límite inferior del arc-length en ese LS).
• Según se definen los radios de las diferentes iteraciones del método, la carga
aplicada en un substep determinado diferente del primero en la resolución de un paso de
carga no es fácil de conocer de forma exacta, ya que el valor de la carga aplicada varía a
lo largo del arco esférico. Sin embargo con otros métodos como el de Newton-Raphson la
carga sí es perfectamente conocida. Esto puede apreciarse por ejemplo en la figura 6.17.
De ahí que, aunque también pueden obtenerse cargas críticas con el método del Arc-
length ajustando bien sus parámetros, siempre que sea posible se recomienda que se
obtengan mediante otros métodos como el de Newton-Raphson cuya precisión será
mayor. Por todo esto, cuando el objetivo es determinar la carga crítica de pandeo de una
estructura, se aconseja realizar un análisis lineal previo de pandeo de autovalores antes
de realizar el análisis de pandeo no lineal.
• El arc-length es un método muy potente para hacer frente a los análisis no
lineales mediante elementos finitos en el cálculo de estructuras, pero su correcta
aplicación requiere cierta pericia, ya que hay que elegir los parámetros que lo gobiernan
con mucho cuidado, se debe hacer una buena estimación del radio de referencia que se
usará para resolver un paso de carga llegando a un compromiso entre tiempo de
ejecución y precisión.
• Cuando se usa el arc-length, es mejor basar el criterio de convergencia en
fuerzas [CNVTOL,F] y no en desplazamientos [CNVTOL,U].
• El factor de carga total del arc-length, λ , (que puede encontrarse en la etiqueta
ALLF del comando SOLU) puede ser tanto positivo como negativo. De manera análoga, el
valor de TIME en la solución, que en un análisis del arc-length se relaciona con el factor

DISEÑO DE UN SILO CONFORME AL EUROCÓDIGO CAPÍTULO 6: MÉTODOS NUMÉRICOS USADOS POR ANSYS 8.0. ESTUDIO DE LA CONVERGENCIA
E.T.S. INGENIEROS, UNIVERSIDAD DE SEVILLA 114
de carga total, λ , también puede ser positivo o negativo. La interpretación de valores
negativos en ALLF o TIME indica, simplemente que el método del arc-length está
aplicando la carga en la dirección contraria a la definida en el problema para mantener la
estabilidad en la estructura. Cuando esto ocurre, se corre el peligro de que el arc-length
vuelva atrás siguiendo la misma trayectoria de carga, pero en sentido inverso,
produciéndose el fenómeno denominado “drifting back”. El fenómeno de “drifting back”
suele deberse a una mala elección del tamaño del radio del arc-length (radios demasiado
grandes o demasiado pequeños). Los valores negativos de ALLF o TIME se encuentran
de forma habitual cuando se dan comportamientos de “snap-through” en la estructura.