4.7. Aplicaciones de las Derivadas: Linealización y...
29
Cálculo I 4.7. Aplicaciones de las Derivadas: Linealización y Diferenciales Julio C. Carrillo E. * Índice 1. Introducción 1 2. Errores 2 3. Linealización 4 4. Diferenciales 10 A. Teorema de Taylor (Opcional) 17 * Profesor Escuela de Matemáticas, UIS.
Transcript of 4.7. Aplicaciones de las Derivadas: Linealización y...

Cálculo I
4.7. Aplicaciones de las Derivadas:
Linealización y Diferenciales
Julio C. Carrillo E.
*
Índice
1. Introducción 1
2. Errores 2
3. Linealización 4
4. Diferenciales 10
A. Teorema de Taylor (Opcional) 17
*Profesor Escuela de Matemáticas, UIS.
Cálculo I
1. Introducción
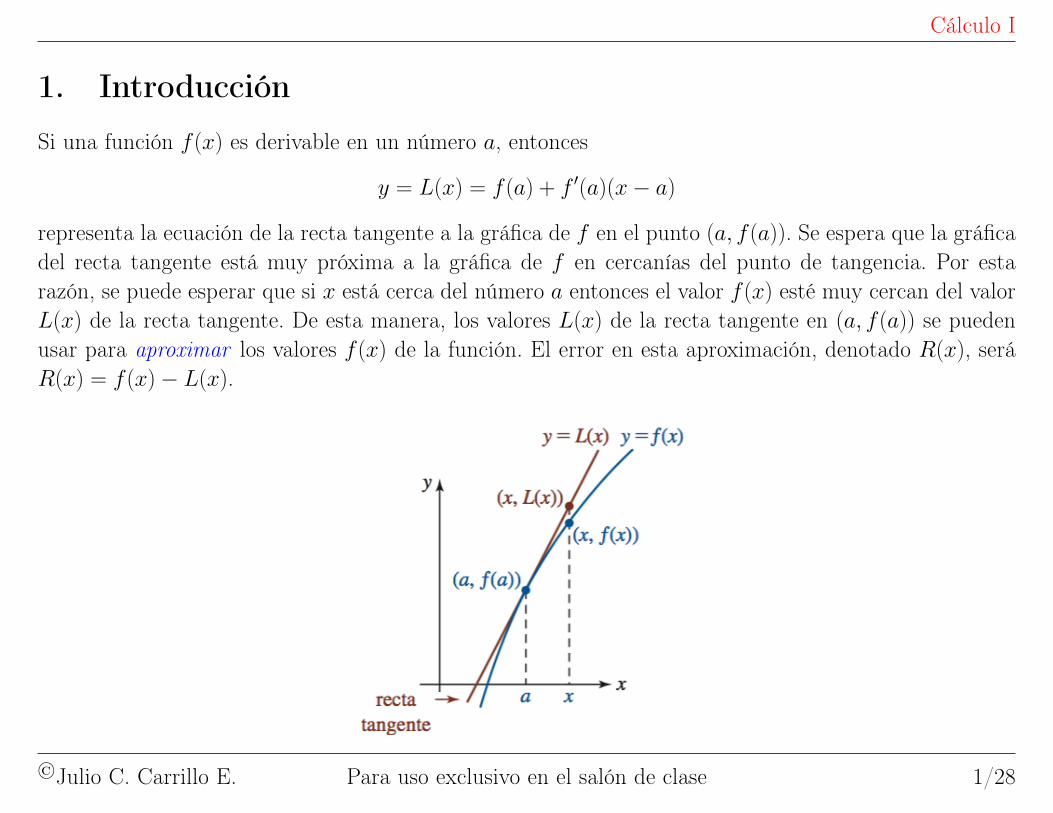
Si una función f (x) es derivable en un número a, entonces
y = L(x) = f (a) + f
0(a)(x� a)
representa la ecuación de la recta tangente a la gráfica de f en el punto (a, f (a)). Se espera que la gráficadel recta tangente está muy próxima a la gráfica de f en cercanías del punto de tangencia. Por estarazón, se puede esperar que si x está cerca del número a entonces el valor f (x) esté muy cercan del valorL(x) de la recta tangente. De esta manera, los valores L(x) de la recta tangente en (a, f (a)) se puedenusar para aproximar los valores f (x) de la función. El error en esta aproximación, denotado R(x), seráR(x) = f (x)� L(x).
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 1/28

Cálculo I
2. Errores
Definición 1 (Errores en aproximaciones). Sea x
⇤ un valor aproximado del valor real x. Se define elerror en este cálculo como
x� x
⇤,
y el error relativo en el mismo cálculo como
x� x
⇤
x
.
El error relativo es un error sin dimensiones, o en tanto por uno. Si se multiplica por 100, el error relativose convierte en tanto por ciento o error porcentual. En la práctica es más importante el error relativo.
Definición 2 (Cifras significativas o dígitos exactos). La cantidad de cifras significativas de un númeroaproximado es la cantidad de dígitos significativos exactos de dicho número.
Definición 3 (Cifras decimales exactas o dígitos decimales correctos). La cantidad de cifras decimalesexactas de un número aproximado es la cantidad de cifras exactas que están después de la coma decimal.
Por ejemplo,
5,078 tiene 4 cifras significativas, 3 cifras decimales exactas0,000425 tiene 3 cifras significativas, 6 cifras decimales exactas
4235 tiene 4 cifras significativas, 0 cifras decimales exactas525,48 tiene 5 cifras significativas, 2 cifras decimales exactas
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 2/28

Cálculo I
Definición 4 (Cifras decimales exactas y cifras significativas). Se dice que el número x
⇤ aproxima a x
con d cifras decimales exactas si d es el mayor entero no negativo para el cual
|x� x
⇤| < 0,5⇥ 10
�d
.
Igualmente, se dice que el número x
⇤ aproxima a x con k cifras significativas si k es el mayor entero nonegativo para el cual
|x� x
⇤||x| < 0,5⇥ 10
1�k
= 5⇥ 10
�k
.
Ejemplo 1. Si x⇤ = 25,3654 es una aproximación de x = 25,36536 calcular el número de decimalescorrectos y el numero de cifras significativas de la aproximación.
Solución. Para que la aproximación de x mediante x⇤ tenga d cifras decimales exactas, el error relativo|x� x
⇤| = 0,00004 = 4⇥ 10
�5 debe cumplir con la condición que
4⇥ 10
�5 0,5⇥ 10
�d
=) 10
d�5 1
8
=) d 5� log 8 = 4,09691.
Es decir la aproximación tiene 4 decimales correctos. Así que x
⇤= 25,3654.
Por otro lado, para que la aproximación de x mediante x
⇤ tenga d cifras significativas el error relativo
|x� x
⇤||x| = 1,5769⇥ 10
�6
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 3/28

Cálculo I
debe cumplir con la condición que
1,5769⇥ 10
�6 5⇥ 10
�k
=) 10
k�6 5
1,5769
=) k 6 + log
✓5
1,5769
◆= 6, 5
Entonces la aproximación x
⇤ tiene k = 6 cifras significativas. Es decir, x⇤ = 25,3654.
Observación 1. Observe que se pueden obtener a d y k de una manera más sencilla, pues 4 ⇥ 10
�5 0,5⇥ 10
�4 y dado que 1,5759 < 5 entonces 1,5769⇥ 10
�6< 5⇥ 10
�6.
3. Linealización
Definición 5 (Linealización). Si una función f (x) es derivable en un número a, entonces se dice que lafunción
L(x) = f (a) + f
0(a)(x� a)
es una linealización de f en a. Para un número x próximo a a, la aproximación
f (x) ⇡ L(x)
se denomina aproximación lineal local de f en a.
Según lo expuesto previamente, es posible encontrar el número de cifras decimales exactas y el númerode cifras significativas en esta aproximación de f (x) mediante los valores de la recta tangente.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 4/28

Cálculo I
Ejemplo 2. Encuentre una linealización de f (x) = sen x en a = 0.
Solución. Dado que f (x) = sen x y f
0(x) = cos x entonces f (0) = 0 y f
0(0) = 1. Entonces la ecuación
de la recta tangente a la gráfica de la función f (x) = sen x en (0, 0) es y = f (0) + f
0(0)(x� 0) = x.
En tal caso, la linealización de f (x) = sen x en a = 0 es L(x) = x. Además la aproximación local de f
en a = 0 essen x ⇡ x,
lo cual explica porque la gráfica de f (x) = sen x y su linealización L(x) son casi la misma cerca delorigen.
Ejemplo 3. Calcule un valor aproximado de ln 1,1 mediante su linealización y determine una cota superiorpara el valor absoluto del error cometido en la aproximación.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 5/28
Cálculo I
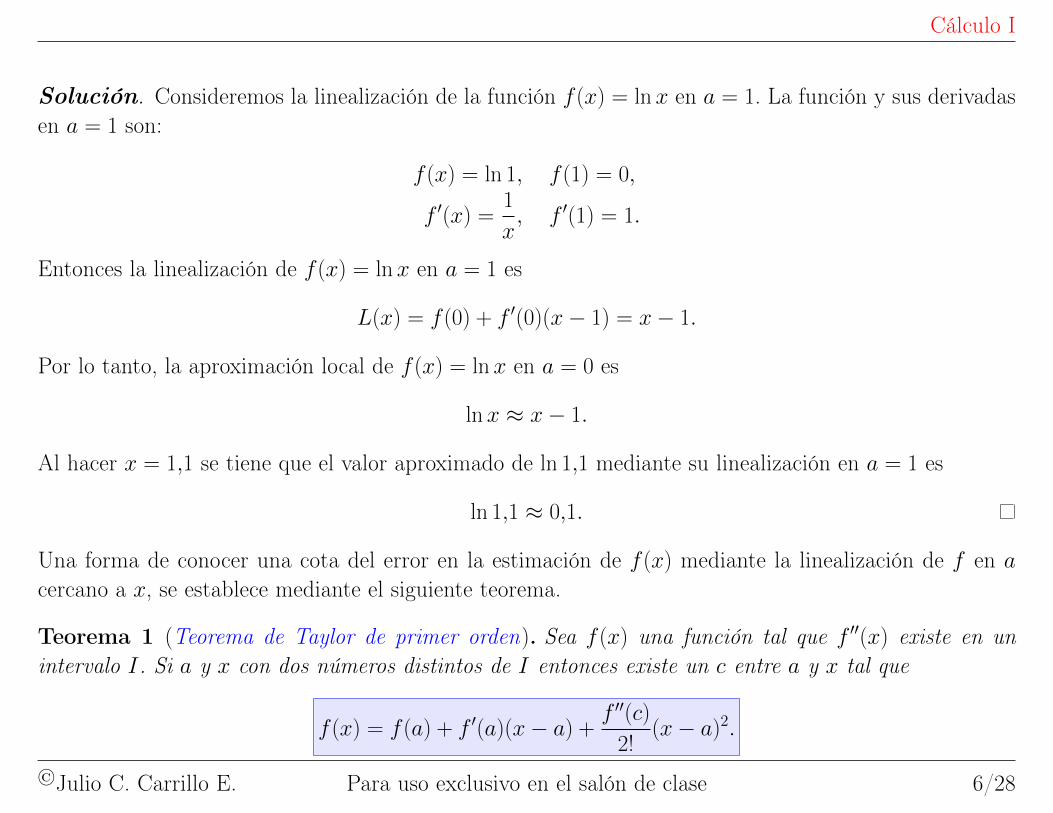
Solución. Consideremos la linealización de la función f (x) = ln x en a = 1. La función y sus derivadasen a = 1 son:
f (x) = ln 1, f (1) = 0,
f
0(x) =
1
x
, f
0(1) = 1.
Entonces la linealización de f (x) = ln x en a = 1 es
L(x) = f (0) + f
0(0)(x� 1) = x� 1.
Por lo tanto, la aproximación local de f (x) = ln x en a = 0 es
ln x ⇡ x� 1.
Al hacer x = 1,1 se tiene que el valor aproximado de ln 1,1 mediante su linealización en a = 1 es
ln 1,1 ⇡ 0,1.
Una forma de conocer una cota del error en la estimación de f (x) mediante la linealización de f en a
cercano a x, se establece mediante el siguiente teorema.
Teorema 1 (Teorema de Taylor de primer orden). Sea f (x) una función tal que f
00(x) existe en un
intervalo I. Si a y x con dos números distintos de I entonces existe un c entre a y x tal que
f (x) = f (a) + f
0(a)(x� a) +
f
00(c)
2!
(x� a)
2.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 6/28

Cálculo I
Demostración. Se define el error en la aproximación de f (x) mediante su linealización L(x) como R1(x).En tal caso,
f (x) = f (a) + f
0(a)(x� a) +R1(x) (1)
En este caso, se busca un número real a2 de manera que este error sea de la forma
R1(x) = a2(x� a)
2.
Así que,f (x) = f (a) + f
0(a)(x� a) + a2(x� a)
2.
Observe quef (x)� f (a)� f
0(a)(x� a)� a2(x� a)
2= 0 (2)
Al cambiar en esta ecuación a a por t, no se va a cumplir la ecuación, pero se va poder definir la función
G(t) = F (t)� a2(x� t)
2,
donde
F (t) = f (x)� f (t)� f
0(t)(x� t).
Según la definición de G(t) y (2) se tiene que
G(a) = 0 ⌘ F (a)� a2(x� a)
2= 0.
Como x 6= a entonces se sigue de este resultado que se pude considerar
a2 =F (a)
(x� a)
2.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 7/28

Cálculo I
De esta manera se tiene que la función G(t), que está bien definida en el intervalo cerrado J con extremosa y x, se puede escribir como
G(t) = F (t)� (x� t)
2
(x� a)
2F (a).
Adicionalmente, G(t) es continua en J , derivable en el interior de J y G(x) = G(a) = 0. Por el teoremade Rolle existe un c entre a y x tal que G
0(c) = 0. Como
G
0(c) = G
0(t)
���x=c
= F
0(t) +
2(x� t)
(x� a)
2F (a)
�����x=c
= �f
00(t)(x� t) +
2(x� t)
(x� a)
2F (a)
�����x=c
= �f
00(c)(x� c) +
2(x� c)
(x� a)
2F (a) = (x� c)
�f
00(c) +
2F (a)
(x� a)
2
�
donde x 6= c, pues c está entre a y x, entonces se sigue de G
0(c) = 0 que
F (a) =
f
00(c)
2
(x� a)
2, (3)
donde a su vezF (a) = f (x)� f (a)� f
0(a)(x� a) = R1(a). (4)
De (1), (3) y (4) se sigue el resultado.
Ejemplo 4. Utilice la fórmula de Taylor de primer orden para calcular cos 60,5� y determine el númerode cifras decimales exactas en esta aproximación.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 8/28
Cálculo I
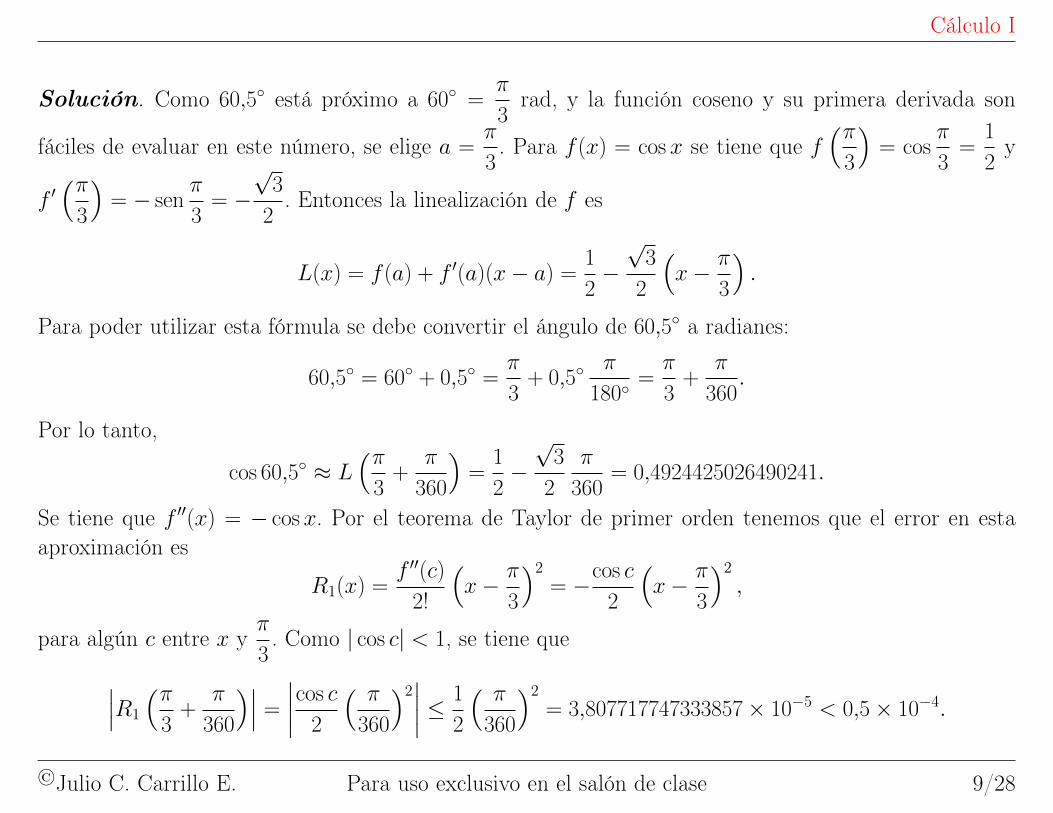
Solución. Como 60,5
� está próximo a 60
�=
⇡
3
rad, y la función coseno y su primera derivada son
fáciles de evaluar en este número, se elige a =
⇡
3
. Para f (x) = cos x se tiene que f
⇣⇡
3
⌘= cos
⇡
3
=
1
2
y
f
0⇣⇡
3
⌘= � sen
⇡
3
= �p3
2
. Entonces la linealización de f es
L(x) = f (a) + f
0(a)(x� a) =
1
2
�p3
2
⇣x� ⇡
3
⌘.
Para poder utilizar esta fórmula se debe convertir el ángulo de 60,5
� a radianes:
60,5
�= 60
�+ 0,5
�=
⇡
3
+ 0,5
� ⇡
180
� =
⇡
3
+
⇡
360
.
Por lo tanto,
cos 60,5
� ⇡ L
⇣⇡
3
+
⇡
360
⌘=
1
2
�p3
2
⇡
360
= 0,4924425026490241.
Se tiene que f
00(x) = � cos x. Por el teorema de Taylor de primer orden tenemos que el error en esta
aproximación es
R1(x) =f
00(c)
2!
⇣x� ⇡
3
⌘2= �cos c
2
⇣x� ⇡
3
⌘2,
para algún c entre x y⇡
3
. Como | cos c| < 1, se tiene que
���R1
⇣⇡
3
+
⇡
360
⌘��� =����cos c
2
⇣⇡
360
⌘2����
1
2
⇣⇡
360
⌘2= 3,807717747333857⇥ 10
�5< 0,5⇥ 10
�4.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 9/28

Cálculo I
Por lo tanto,cos 60,5
� ⇡ 0,4924
con sus cuatro cifras decimales exactas.
4. Diferenciales
El error R1(x) en la aproximación de f (x) mediante su linealización L(x) = f (a) + f
0(a)(x � a) esta
determinado por la cercanía de x a a. Como se vio en la sección anterior, entre más cercano esté x dea más pequeño será el error R1(x) en esta estimación. Por tal razón tiene sentido considerar el errorrelativo
R1(x)
x� a
=
f (x)� f (a)� f
0(a)(x� a)
x� a
.
Por ejemplo, en el caso del ejemplo 4 se tiene que este error nos dice que����R1(x)
x� a
���� 12
�⇡
360
�2⇡
360
=
⇡
360
= 0,8726%.
Originalmente la idea de linealización de una función fue expresada mediante diferenciales. Si f (x) es unafunción derivable en un intervalo abierto que contiene al número a. Si x es un número diferente sobre eleje x se definen los incrementos (incertidumbres) �x y �y mediante las diferencias
�x = x� a, �y = f (x)� f (a) = f (a +�x)� f (a).
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 10/28

Cálculo I
Para valores de �x que estén próximos a 0, se tiene que el error relativo
R1(x)
x� a
=
f (a +�x)� f (a)� f
0(a)�x
�x
=
�y � f
0(a)�x
�x
=
�y
�x
� f
0(x) ⇡ 0.
Esto quiere decir que el cociente diferencial
�y
�x
=
f (x)� f (a)
x� a
=
f (a +�x)� f (x)
�x
es una aproximación del valor de la derivada de f en a:
�y
�x
⇡ f
0(a) o bien �y ⇡ f
0(a)�x.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 11/28

Cálculo I
Las cantidades �x y f
0(a)�x se denominan diferenciales y se denotan como dx y dy respectivamente.
Es decir,�x = dx, dy = f
0(a)dx.
Según la figura, para un cambio dx en x la cantidad dy = f
0(a)dx representa un cambio en la linealización.
Y cuando dx ⇡ 0, el cambio en el incremento �y es aproximadamente el mismo el mismo que el cambioen la linealización dy:
�y ⇡ dy.
Definición 6 (Diferenciales). La diferencial de la variable independiente x es el número diferente de cero�x, y se denota por dx; es decir,
dx = �x.
Si f es una función derivable en x, entonces la diferencial de la variable dependiente y se denota por dy;es decir,
dy = f
0(x)�x = f
0(x)dx.
Dado que �y ⇡ dy, el valor �y es la cantidad exacta mientras que la cantidad diferencial dy representasu aproximación. El error en esta aproximación es �y � dy.
Ejemplo 5.
1. Encuentre �y y dy para f (x) = 5x
2+ 4x + 1.
2. Compare los valores de �y y dy para x = 6 y �x = dx = 0,002.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 12/28
Cálculo I
Solución.
1.
�y = f (x +�x)� f (x)
=
�5(x +�x)
2+ 4(x +�x) + 1
��
�5x
2+ 4x + 1
�
= 5
�(x +�x)
2 � x
2�+ 4 ((x +�x)� x)
= 5�x(2x +�x) + 4�x
= (10x + 4)�x + 5(�x)
2.
Dado que f
0(x) = 10x + 4 y dy = f
0(x)dx entonces
dy = (10x + 4)dx = (10x + 4)�x.
Por lo tanto, �y y dy difieren en 5(�x)
2.
2. Cuando x = 6 y �x = 0,02:
�y = (10(6) + 4)(0,02) + 5(0,02)
2= 1,282
mientras quedy = (10(6) + 4)(0,02) = 1,28.
La diferencia en las respuestas es
�y � dy = 5(�x)
2= 5(0,002)
2= 0,002.
En resumen, el valor exacto �y = 1,28 es aproximado por el valor diferencial dy = 1,28 y el error enesta aproximación es 0,002.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 13/28

Cálculo I
Otra aplicación de los diferenciales se obtiene al considerar que
�y = f (x +�x)� f (x), �y ⇡ f
0(a)�x
de lo cual se sigue quef (x +�x) ⇡ f (x) + f
0(x)dx. (5)
Ejemplo 6. Use diferenciales para aproximar (2,01)3.
Solución. Sean f (x) = x
3 y x = 2, el cual es el número real más cercano a 2,1. En este caso �x = 0,01.En tal caso, dy = f
0(x)dx = 3x
2�x. Por lo tanto, de (5):
(x +�x)
3 ⇡ x
3+ 3x
2�x.
Al considerar x = 2 y �x = 0,01 se tiene que
(2,01)
3 ⇡ 2
3+ 3(2)(0,01) = 8,12.
Ejemplo 7. La arista de un cubo mide 30 cm con un error posible de ±0,02 cm. ¿Cuál es el máximoerror posible aproximado en el volumen del cubo?
Solución. El volumen del cubo es V = x
3 donde x es la longitud de su arista. Si �x es el error en lamedida de la longitud de su arista, entonces el error correspondiente en el cálculo del volumen del cuboes
�V = (x +�x)
3 � x
3.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 14/28

Cálculo I
Esta cantidad se puede aproximar por su diferencial:
dV = V
0(x)dx = 3x
2�x.
Así que para x = 30 y �x = ±0,02 el máximo error aproximado es
�V ⇡ dV = 3(30)
2(±0,02) = ±54 cm2
.
Para estimar el efecto que un error de medida de alrededor de 0,02 cm produce un error en el cálculo delvolumen de alrededor de 54 cm3, que parece a simple vista considerable, se considera el error relativo. Si�V
V
es el error relativo real, los errores relativo aproximado y relativo aproximado porcentual son:
dV
V
=
±54
(30)
3= ± 1
500
=) dV
V
· 100% = ±1
5
% = 0,2%.
Es decir, el error relativo porcentual es aproximadamente alrededor del 0,2%, lo cual es muy bajo.
Teorema 2 (Reglas de diferenciales). Si u = f (x) y v = g(x), donde f y g son diferenciables en sumismo dominio, entonces
d(u + v) = du + dv,
d(uv) = udv + vdu
d
⇣u
v
⌘=
vdu� udv
v
2.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 15/28

Cálculo I
Ejemplo 8. Encuentre dy para y = x
2cos 3x.
Solución. Por las reglas de los diferenciales,
dy = x
2d(cos 3x) + cos 3x d(x
2) = �3x
2cos 3x dx + 2x cos 3x dx = (�3x
2cos 3x + 2x cos 3x)dx.
De modo alternativo, como y = x
2cos 3x es derivable, entonces
dy = f
0(x)dx = (�3x
2cos 3x + 2x cos 3x)dx.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 16/28
Cálculo I
A. Teorema de Taylor (Opcional)
Un primer problema de la teoría de ajuste de funciones f (x) mediante interpolación consiste en encontrarun polinomio p(x), de un cierto grado, el cual coincida con f (x) y sus derivadas hasta un cierto orden enun punto x0 del dominio de f (x), y que además sea una buena aproximación de f (x) cuando x que estécerca de x0.En primer lugar, supongamos que se conoce f (x0). Esta sola condición determina un polinomio p(x) degrado cero que coincide con f en x0:
p(x) = f (x0).
Como p(x) es una función constante, ella no da buenas estimaciones de f (x) cuando la misma funciónf (x) no sea constante.Consideremos que f tiene derivada de primer orden en x0. Entonces se busca en polinomio p(x) tal que
p(x0) = f (x0), p0(x0) = f
0(x0).
Ahora estas dos condiciones determinan un polinomio de primer grado
p(x) = a + bx.
Por lo tanto, como
p(x0) = f (x0) =) a + bx0 = f (x0)
p
0(x0) = f
0(x0) =) b = f
0(x0)
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 17/28

Cálculo I
el cual es un sistema de dos ecuaciones en las variables a, b que tiene una única solución:
a = f (x0)� f
0(x0)x0, b = f
0(x0).
De esto se sigue quep(x) = f (x0) + f
0(x0)(x� x0).
Igualmente, vamos a tener que p(x) no es una buena aproximación de f (x) para valores de x cercanos ax0 si f (x) no es una función lineal.Nuevamente, si tenemos que f (x) tiene derivada de segundo orden en x0 entonces se busca un polinomiop(x) tal que
p(x0) = f (x0), p
0(x0) = f
0(x0), p
00(x0) = f
00(x0). (6)
Mediante esta tres condiciones se puede construir un polinomio de segundo grado,
p(x) = a + bx + cx
2.
En efecto, de las condiciones establecidas tenemos el sistema de ecuaciones lineales
p(x0) = f (x0) =) a + bx0 + cx
20 = f (x0)
p
0(x0) = f
0(x0) =) b + 2cx0 = f
0(x0)
p
00(x0) = f
00(x0) =) 2c = f
00(x0)
el cual se puede representar en forma matricial como2
41 x0 x
20
0 1 2x0
0 0 2
3
5
2
4a
b
c
3
5=
2
4f (x0)
f
0(x0)
f
00(x0)
3
5.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 18/28

Cálculo I
Dado que el determinante de la matriz de los coeficientes de este sistema es diferente de cero, de hecho es2, tenemos que tal sistema tiene una única solución a, b, c; esto a su vez garantiza la existencia y unicidadel polinomio p(x). Por otro lado, resolviendo este sistema de ecuaciones encontramos que
a = f (x0)� f
0(x0)x0 +
f
00(x0)
2
x
20, b = f
0(x0)� f
00(x0)x0, c =
f
00(x0)
2
.
De acuerdo con esto, encontramos finalmente que el polinomio p(x) lo podemos representar de la forma
p(x) = f (x0) + f
0(x0)(x� x0) +
f
00(x0)
2
(x� x0)2.
Recíprocamente, es fácil de comprobar que este polinomio satisface las condiciones dadas en (6).
Ejemplo 9. Sea f (x) = e
x. Entonces f 0(x) = e
x y f
00(x) = e
x. Entonces la recta tangente a la gráfica def (x) en el punto (0, 1) es
p1(x) = f (0) + f
0(0)(x� 0) = 1 + x.
Intuitivamente se espera que la recta tangente sea, generalmente, la que mejor aproxima los valores quetoma la función en los puntos vecinos al punto de tangencia ya que, además de pasar por el punto, tienela misma pendiente de la curva.Ahora también se puede encontrar un polinomio de segundo grado que pase también por el punto (0, 1)
y tal que sus dos primeras derivadas en x = 0 coincidan con las de f (x) = e
x, que son todas iguales a 1.Lo que se busca con tal polinomio de segundo grado es obtener una curva que tiene en el punto (0,1)la misma ordenada, la misma pendiente y concavidad con el mismo signo de la función que se deseaaproximar.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 19/28

Cálculo I
Por este motivo es de esperar que se haya mejorado la aproximación obtenida con el polinomio de primergrado. En este caso el polinomio es
p2(x) = f (0) + f
0(0)(x� 0) +
f
00(0)
2!
(x� 0)
2= 1 + x +
x
2
2
.
Si se calculan algunas ordenadas para valores de x cercamos a x = 0, se encuentra que el polinomio desegundo grado proporciona una aproximación mejor que el de primer grado, tal como se puede apreciaren la siguiente tabla. Se agrega la información del polinomio de Taylor
p3(x) = 1 + x +
x
2
2
+
x
3
6
.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 20/28

Cálculo I
x e
x
p1(x) p2(x) p3(x)
�0,1 0,9048 0,9000 0,9050 0,90483
�0,2 0,8187 0,8000 0,8200 0,81866
0,1 1,1052 1,1000 1,1050 1,10516
0,2 1,2214 1,2000 1,2200 1,22213
Las anteriores aproximaciones se pueden mejorar utilizando los llamados polinomios de Taylor, de talmodo que se puede mejorar la aproximación al aumentar el grado del polinomio. En general, tenemos elsiguiente teorema.
Teorema 3 (Polinomios de Taylor). Sea f (x) una función tal que f
(n)(x0) existe. Entonces existe un
único polinomio p
n
(x) de grado a lo más n que satisface las n + 1 condiciones:
p
n
(x0) = f (x0), p0(x0) = f
0(x0), . . . , p
(n)(x0) = f
(n)(x0).
Tal polinomio es
p
n
(x) = f (x0) + f
0(x0)(x� x0) +
f
00(x0)
2!
(x� x0)2+ · · · + f
(n)(x0)
n!
(x� x0)n
,
o bien,
p
n
(x) =
nX
k=0
f
(k)(x0)
k!
(x� x0)k
,
el cual se llama polinomio de Taylor de grado n de f (x) en x0.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 21/28

Cálculo I
Demostración. Las n + 1 condiciones dadas sobre f (x) determinan un polinomio de grado n,
p(x) = a0 + a1x + · · · + a
n
x
n
.
De las condiciones establecidas tenemos el sistema de ecuaciones lineales
p(x0) = f (x0) =) a0 + a1x0 + a2x20 · · · + a
n
x
n
0 = f (x0)
p
0(x0) = f
0(x0) =) a1 + 2a2x0 + · · · + na
n
x
n�10 = f
0(x0)
p
00(x0) = f
00(x0) =) 2a2 + · · · + (n� 1)na
n
x
n
0 = f
00(x0)
p
(n)(x0) = f
(n)(x0) =) 2 · 3 · · · (n� 1)na
n
x
n
0 = f
(n)(x0)
el cual se puede representar en forma matricial como2
666664
1 x0 x
20 · · · x
n
0
0 1! 2x0 · · · nx
n
0
0 0 2! · · · (n� 1)nx
n
0... ... ... . . . ...0 0 0 0 n!x
n
0
3
777775
2
666664
a0
a1
a2...a
n
3
777775=
2
666664
f (x0)
f
0(x0)
f
00(x0)...
f
(n)(x0)
3
777775.
Dado que el determinante de la matriz de los coeficientes de este sistema es diferente de cero, de hecho esnY
k=1
k!,
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 22/28

Cálculo I
tenemos que tal sistema tiene una única solución a0, a1, . . . an; esto a su vez garantiza la existencia yunicidad el polinomio p(x).Ahora bien, para facilitar la obtención del polinomio, éste se considera de la forma
p(x) = a0 + a1(x� x0) + · · · + a
n
(x� x0)n
.
Como
p(x) = a0 + a1(x� x0) + a2(x� x0)2+ a3(x� x0)
3+ · · · + a
n
(x� x0)n
,
p
0(x) = a1 + 2a2(x� x0) + 3a3(x� x0)
2+ · · · + na
n
(x� x0)n
,
p
00(x) = 2a2 + 2 · 3(x� x0) + · · · + na
n
(x� x0)n
,
...p
(n)(x) = 2 · 3 · · · (n� 1)na
n
se tiene que
p(x0) = f (x0) =) a0 = f (x0)
p
0(x0) = f
0(x0) =) a1 = f
0(x0)
p
000(x0) = f
000(x0) =) 2a1 = f
00(x0)
p
(n)(x0) = f
(n)(x0) =)n!a
n
= f
(n)(x0)
De esto se obtiene que
a
k
=
f
(k)(x0)
k!
, k = 0, 1, . . . , n.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 23/28

Cálculo I
Ejemplo 10. Si f (x) = cos x entonces f 0(x) = � sen x, f 00
(x) = � cos x, f 000(x) = sen x, f 0000
(x) = cos x,y así sucesivamente. Como f (0) = 1, f 0
(0) = 0, f 00(0) = �1, f 000
(0) = 0, f 0000(0) = 1, etcétera, entonces el
polinomio de Taylor de grado 2n de f (x) en x0 = 0 es
p2n(x) = 1� x
2
2!
+
x
4
4!
+ · · · + (�1)
n
x
2n
(2n)!
=
nX
k=0
(�1)
k
x
2k
(2k)!
.
En este caso no aparecen potencias impares. La Figura 1 nos muestra algunas de las gráficas de estepolinomio para algunos valores pares de n.
p0(x) p2(x) p4(x)
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 24/28

Cálculo I
p6(x) p8(x) p10(x)
Figura 1: Gráficas del polinomio de Taylor p2n(x) de cos(x) en el intervalo [�5, 5], para n = 0, 1, 2, 3, 4, 5.
Si bien la función f (x) en general es desconocida, podemos plantear el problema establecer que tan buenaes la aproximación de f (x) mediante los valores del polinomio de Taylor p
n
(x). Si f (x) tiene derivadade orden n en x0 y el error en la aproximación de f (x) mediante el polinomio de Taylor p
n
(x) se definecomo R
n
(x) = f (x)� p
n
(x), que también se llama resto, entonces se tiene que
f (x) = p
n
(x) +R
n
(x) =
nX
k=0
f
(k)(x0)
k!
(x� x0)k
+R
n
(x),
la cual se llama la fórmula de Taylor con resto R
n
(x). Esta fórmula es útil para estimar el ordende magnitud de R
n
(x), o lo que es lo mismo, para determinar que tan buena es la aproximación de f (x)
mediante p
n
(x) para un x dado.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 25/28

Cálculo I
El término del resto explica entonces en que casos los polinomios de Taylor son una buena aproximaciónde una función dada. Aunque algunos autores llaman también a R
n
(x) el residuo, generando la nociónde residuo de la división, en general se prefiere utilizar la palabra resto para significar que es la parte quese le agrega al polinomio de Taylor para obtener la función.En general, el polinomio de Taylor p
n
(x) de grado n de una función f (x) en x0 da mejores aproximacióncuando n es suficientemente grande y cuando x esta cerca de x0. Por lo tanto, si se puede demostrar queel término del resto tiende a 0, entonces se debe tener que el polinomio de Taylor p
n
(x) es una buenaaproximación de la función f (x); ojalá, no solamente en x sino también para los valores de x en un ciertointervalo. La siguiente gráfica nos muestra que p5(x) es una mejor aproximación a f (x) que p3(x) puestoque R5(x) está más cercano a 0 para más valores de x.
Figura 2: Gráficas del resto R
n
(x), n = 1, 3, 5, de la función f (x) = sen x cuando x0 = 0.
El Teorema de Taylor, en su versión implícita, establece que el error Rn
(x) en la aproximación de f (x)
mediante el polinomio de Taylor pn
(x) tiende a cero más rápido que cualquier polinomio no nulo de gradon cuando x ! x0.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 26/28

Cálculo I
Teorema 4 (Teorema de Taylor). Sea f (x) una función tal que f
(n+1)(x0) existe para toda x en un
intervalo I que contiene a x0. Entonces para todo x en I se tiene que existe existen funciones p
n
(x) yR
n
(x) tales quef (x) = p
n
(x) +R
n
(x),
donde
p
n
(x) = f (x0) + f
0(x0)(x� x0) +
f
00(x0)
2!
(x� x0)2+ · · · + f
(n)(x0)
n!
(x� x0)n
recibe el nombre de polinomio de Taylor de ƒ en x0, de grado n, y
R
n
(x) =
f
(n)(c)
n!
(x� x0)n
,
para algún c entre x0 y x. A R
n
(x) se le llama la forma del residuo de Lagrange.
Demostración. La demostración de este resultado es similar al caso demostrado para el caso del polinomioy del resto de segundo grado.
Ejemplo 11. Sea f (x) = e
x y x0 = 0. Como la derivada f
(k)(x) = e
x para todo entero positivo k y enparticular f (k)
(0) = 1, entonces tenemos que
e
x
=
nX
k=0
x
k
k!
+R
n
(x).
Como f (n+1)(x) = e
x
> 0 para todo x entonces f (n+1)(x) es creciente en cualquier intervalo. En particular,
si 0 < x b entonces 1 e
x e
b. Así quex
n+1
(n + 1)!
R
n
(x) e
b
x
n+1
(n + 1)!
si 0 < x b.
©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 27/28
Cálculo I
Si se desea calcular el número de Euler e, se puede considerar x = b = 1 y tener en cuenta que eb = e < 3.En tal caso,
e =
nX
k=0
1
k!
+R
n
(1),
donde1
(n + 1)!
R
n
(1) <
3
(n + 1)!
,
lo cual permite calcular e con el grado de aproximación que se desee. Si por ejemplo, se desea calcular econ 7 cifras decimales exactas, basta considerar
3
(n + 1)!
1
2
⇥ 10
�8 () (n + 1)! � 6⇥ 10
8= 600 000 000.
Mediante cálculo directo se puede obtener que 12! = 479 001 600 y 13! = 6 227 020 800. Por lo tanto,n � 12. Así que para n = 12,
e =
12X
k=0
1
k!
+R12(1) donde 1,605904384⇥ 10
�10 R12(1) < 4,817713131⇥ 10
�10. (7)
En este caso,
e ⇡ p12(1) =
12X
K=0
1
k!
=
260 412 269
95 800 320
= 2,718281828286169.
Así que el valor de e con siete cifras decimales es e ⇡ 2,7182818 o con ocho cifras decimales es e ⇡2,71828183. Esto es consistente con el hecho que de (7) se tiene que
2,718281826 < e < 2,718281833. ⇤©Julio C. Carrillo E. Para uso exclusivo en el salón de clase 28/28