2 432 667 - patentimages.storage.googleapis.com · comprenden a su vez un rodillo de arrastre...
14
ES 2 432 667 A1 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 2 432 667 Número de solicitud: 201330961 51 Int. CI.: B65B 43/46 (2006.01) 12 SOLICITUD DE PATENTE A1 54 Título: Dispositivo de transporte de envases flexibles para máquinas envasadoras 71 Solicitantes: BOSSAR PACKAGING, S.A. (100.0%) C/ Can Magi, 2-4 Centro Industrial Santiga 08210 Barberá del Vallés (Barcelona) ES 72 Inventor/es: SÁEZ LÓPEZ, Abel 74 Agente/Representante: URÍZAR ANASAGASTI, Jesús María 22 Fecha de presentación: 26.06.2013 43 Fecha de publicación de la solicitud: 04.12.2013 57 Resumen: Dispositivo de transporte de envases flexibles para máquinas envasadoras. Este dispositivo comprende una pareja de brazos (1, 2) paralelos con unas pinzas (11, 21) para la sujeción de los envases (E) a transportar y unos medios de regulación de separación que comprenden: - un mecanismo de tijera (4) con dos barras (41, 42) articuladas al extremo posterior de los brazos (1, 2) y portadores de unos medios de rodadura (46, 47); - unos tramos de guía (5, 5a,...) distribuidos en la máquina envasadora, provistos de una pista longitudinal (51) para el guiado de los medios de rodadura (46, 47) del mecanismo de tijera (4) y - unos medios actuadores (7) adecuados para desplazar cada tramo de guía (5, 5a) y disponerla en una posición adecuada para determinar mediante una variación de longitud de los mecanismos de tijera (4), la separación de cada pareja de brazos (1, 2) paralelos en cada zona del recorrido del dispositivo de transporte.
-
Upload
nguyendien -
Category
Documents
-
view
216 -
download
0
Transcript of 2 432 667 - patentimages.storage.googleapis.com · comprenden a su vez un rodillo de arrastre...
ES 2
432
667
A1
19 OFICINA ESPAÑOLA DEPATENTES Y MARCAS
ESPAÑA 11
21
Número de publicación: 2 432 667Número de solicitud: 201330961
51 Int. CI.:
B65B 43/46 (2006.01)
12 SOLICITUD DE PATENTE A1
54 Título: Dispositivo de transporte de envases flexibles para máquinas envasadoras
71 Solicitantes:
BOSSAR PACKAGING, S.A. (100.0%)C/ Can Magi, 2-4 Centro Industrial Santiga08210 Barberá del Vallés (Barcelona) ES
72 Inventor/es:
SÁEZ LÓPEZ, Abel
74 Agente/Representante:
URÍZAR ANASAGASTI, Jesús María
22 Fecha de presentación:
26.06.2013
43 Fecha de publicación de la solicitud:
04.12.2013
57 Resumen:Dispositivo de transporte de envases flexibles paramáquinas envasadoras.Este dispositivo comprende una pareja de brazos (1,2) paralelos con unas pinzas (11, 21) para la sujeciónde los envases (E) a transportar y unos medios deregulación de separación que comprenden: - unmecanismo de tijera (4) con dos barras (41, 42)articuladas al extremo posterior de los brazos (1, 2) yportadores de unos medios de rodadura (46, 47); -unos tramos de guía (5, 5a,...) distribuidos en lamáquina envasadora, provistos de una pistalongitudinal (51) para el guiado de los medios derodadura (46, 47) del mecanismo de tijera (4) y - unosmedios actuadores (7) adecuados para desplazarcada tramo de guía (5, 5a) y disponerla en unaposición adecuada para determinar mediante unavariación de longitud de los mecanismos de tijera (4),la separación de cada pareja de brazos (1, 2)paralelos en cada zona del recorrido del dispositivode transporte.

2
DESCRIPCIÓN
Dispositivo de transporte de envases flexibles para máquinas envasadoras. Objeto de la invención. 5 La presente invención se refiere a un dispositivo de transporte de envases flexibles adecuado para acoplarse a un transportador sin fin encargado de desplazarlo a lo largo de las diferentes estaciones de una envasadora, comprendiendo dicho dispositivo al menos dos brazos paralelos que presentan en los laterales enfrentados unas pinzas para la sujeción de los envases a transportar; estando dichos brazos dispuestos con una separación adecuada 10 al ancho de los envases a transportar y relacionados con unos medios para su aproximación y alejamiento y la realización de la apertura y cierre de las bocas de los envases respectivamente. Campo de aplicación de la invención.
15 Esta invención es aplicable en máquinas envasadoras automáticas de envases flexibles. Antecedentes de la invención.
Actualmente son ampliamente conocidas en el mercado diferentes tipos de envasadoras, principalmente envasadoras 20 horizontales, que disponen de un dispositivo de transporte asociado a un transportador sin fin, incluyendo dicho dispositivo de transporte unas parejas de brazos paralelos provistos en los laterales enfrentados de unas pinzas para la sujeción de los envases por los extremos laterales opuestos y su desplazamiento entre sucesivas estaciones de trabajo. 25 En estos dispositivos de transporte cada pareja de brazos debe presentar una separación nominal acorde al ancho de los envases a transportar, estando dicha pareja de brazos asociados además a unos medios de accionamiento capaces de realizar su aproximación en la medida necesaria para conseguir la apertura de la boca del envase sujetado por los mismos y, una vez llenado el envase con el producto a envasar provocar el retorno de dichos brazos a la posición original tensando la boca del envase y consiguiendo por tanto el cierre de la misma. 30 En algunas de las máquinas existentes en el mercado el transportador sin fin utilizado para desplazar el dispositivo de transporte por las diferentes estaciones de trabajo de la envasadora comprenden dos cadenas paralelas a las que se encuentran fijadas los respectivos brazos de cada dispositivo de transporte siendo preciso desfasar ambas cadenas o realizar el montaje de los brazos sobre las mismas en diferentes posiciones para conseguir que la separación nominal 35 entre dichos brazos sea la adecuada al envase a transportar. Obviamente esta operativa resulta especialmente compleja desde un punto de vista de montaje a la hora de modificar la separación de los brazos cuando se cambia el formato de envase. 40 En estas máquinas, además de los medios necesarios para ajustar la separación nominal entre cada pareja de brazos del dispositivo de transporte es preciso disponer de unos segundos medios para provocar la aproximación y el alejamiento de los brazos paralelos y conseguir la apertura y cierre de la boca de los envases transportados en diferentes zonas del recorrido por la máquina envasadora. 45 Estos segundos medios pueden presentar diferentes configuraciones incluyendo generalmente unos actuadores generados mediante unos juegos de brazos y levas distribuidos a lo largo del recorrido del dispositivo de transporte por la envasadora. Esta solución resulta especialmente compleja debido al elevado número de elementos móviles que intervienen en la 50 misma y a la dificultad de sincronización tanto de las cadenas de arrastre como de los actuadores encargados de realizar la aproximación o separación de cada pareja de brazos paralelos. Otros dispositivos de transporte de envases flexibles en máquinas envasadoras son del tipo descrito en el documento de patente ES 2229836 en la que el acercamiento y separación de los brazos paralelos portadores de las pinzas de 55 sujeción de los envases están constituidos por unos primeros medios de accionamiento que comprenden para cada brazo móvil un respectivo tornillo sin fin vinculado al extremo del brazo correspondiente por una tuerca de traslación y accionado a su vez por un motor (10) acoplado a los tornillos sin fin a través de unos medios de transmisión que comprenden a su vez un rodillo de arrastre solidario del motor, y un rodillo conducido solidario de los tornillos sin fin. 60 Esta construcción también resulta especialmente compleja y presenta el inconveniente de requerir para cada pareja de
ES 2 432 667 A1

3
brazos paralelos la intervención de un motor con los medios de transmisión mencionados anteriormente y realizar un control de dichos motores de forma sincronizada para que realicen la aproximación y alejamiento de los brazos portadores de las pinzas en unas zonas concretas del recorrido descrito por el dispositivo de transporte en la máquina envasadora. 5 Descripción de la invención.
El dispositivo de transporte de envases flexibles para envasadoras objeto de esta invención siendo adecuado para acoplarse a un transportador sin fin encargado de desplazarlo a lo largo de las diferentes estaciones de trabajo de una envasadora, y comprendiendo dicho dispositivo de transporte al menos una pareja de brazos paralelos que presentan 10 en los laterales enfrentados unas pinzas para la sujeción de los envases a transportar y unos medios de regulación de separación entre cada pareja de brazos; presenta unas particularidades constructivas orientadas a simplificar de forma drástica la construcción y facilidad de ajuste de los medios de regulación encargados de separar cada pareja de brazos de forma que ésta pueda ajustarse en diferentes puntos de la trayectoria de circulación del dispositivo de transporte a lo largo de la máquina envasadora controlando únicamente el movimiento de unas guías distribuidas a lo 15 largo de la trayectoria de dicho dispositivo de transporte por la máquina envasadora. Para ello y de acuerdo con la invención los brazos paralelos de cada pareja se encuentran montados con posibilidad de desplazamiento longitudinal respecto a una pieza de soporte adecuada para fijarse a un transportador sin fin encargado de desplazar el dispositivo de transporte por las diferentes estaciones de trabajo de la envasadora; 20 comprendiendo los medios de regulación de la separación entre cada pareja de brazos un mecanismo de tijera dispuesto en un plano paralelo al definido por la pareja de brazos paralelos, y que comprende dos barras relacionadas entre sí por una zona intermedia mediante un eje vertical de giro provisto de unos medios de guiado respecto a la pieza de soporte en una dirección transversal o perpendicular a la dirección de desplazamiento longitudinal de los brazos paralelos; comprendiendo dichas barras sendos extremos anteriores articulados mediante 25 sendos ejes verticales de giro al extremo posterior de los brazos paralelos de una misma pareja, y sendos extremos posteriores portadores de unos medios de rodadura. Los medios de regulación de la separación entre cada pareja de brazos comprende adicionalmente unos tramos de guía distribuidos en la máquina envasadora, paralelamente al recorrido del dispositivo de transporte y provistos de 30 una pista longitudinal para el guiado de los medios de rodadura de los mecanismos de tijera asociados a cada pareja de brazos paralelos; estando asociados dichos tramos de guía a unos medios actuadores adecuados para desplazar cada tramo de guía en dirección transversal y posicionarla en una posición adecuada, más o menos avanzada, para determinar la separación de cada pareja de brazos paralelos en cada zona del recorrido del dispositivo de transporte. 35 Con estas características basta con posicionar convenientemente los tramos de guía a lo largo de la máquina para conseguir un plegado o desplegado variable de los mecanismos de tijera y consiguientemente un desplazamiento longitudinal, simultáneo, y en sentidos opuestos de los brazos paralelos respecto a la pieza de soporte, con la consiguiente variación de separación entre dichos brazos paralelos. 40 Este mecanismo de transporte permite regular tanto la separación nominal entre los brazos paralelos, para ajustarla al formato de envase a utilizar, como la aproximación y separación de los brazos paralelos de una misma pareja durante la apertura y cierre de las bocas de los envases a transportar. Descripción de las figuras. 45
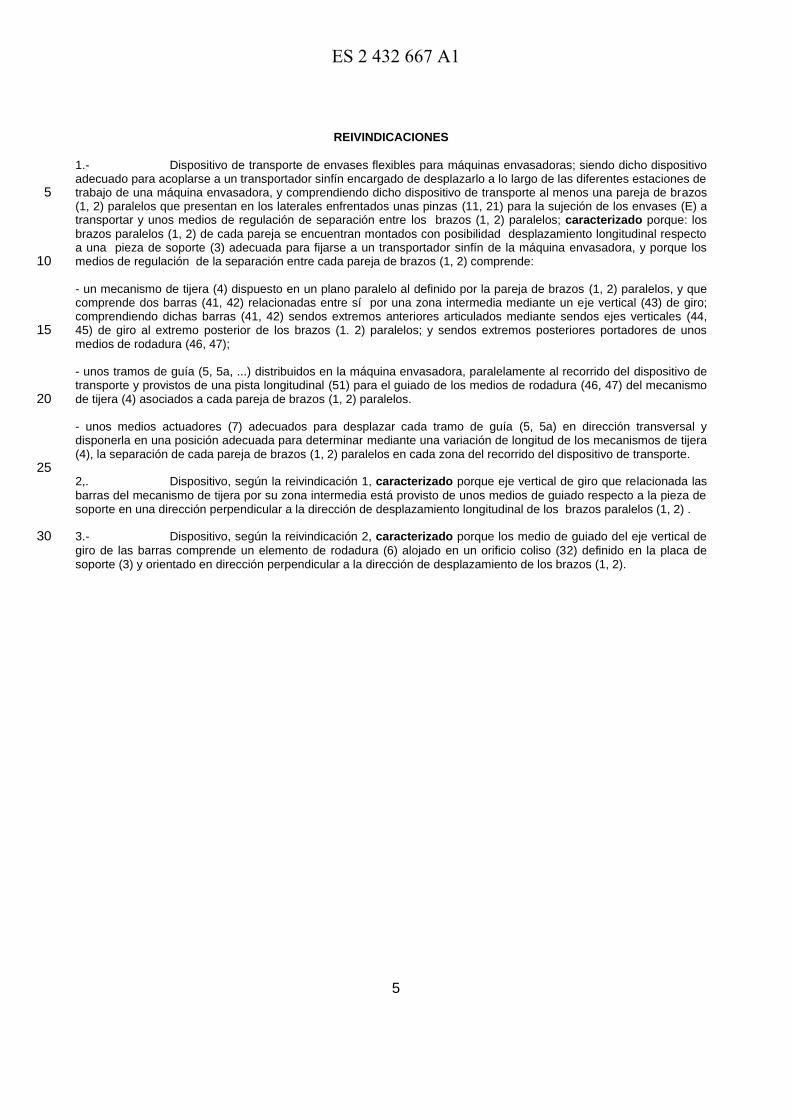
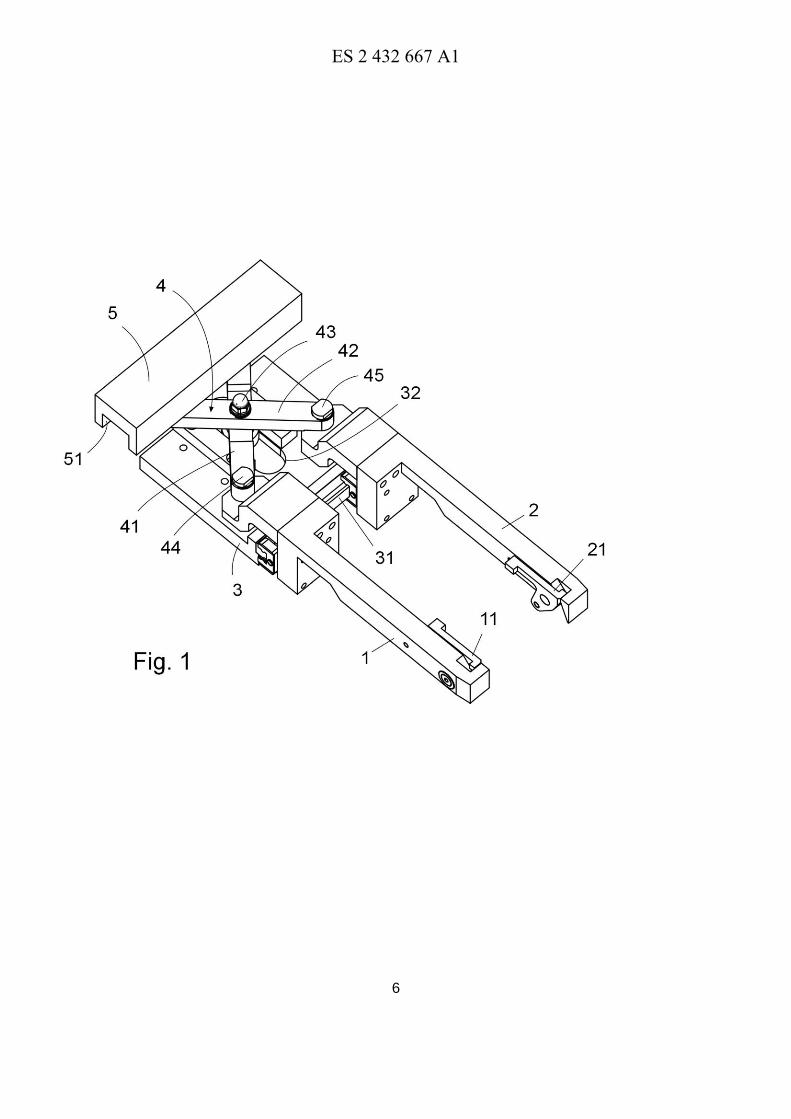
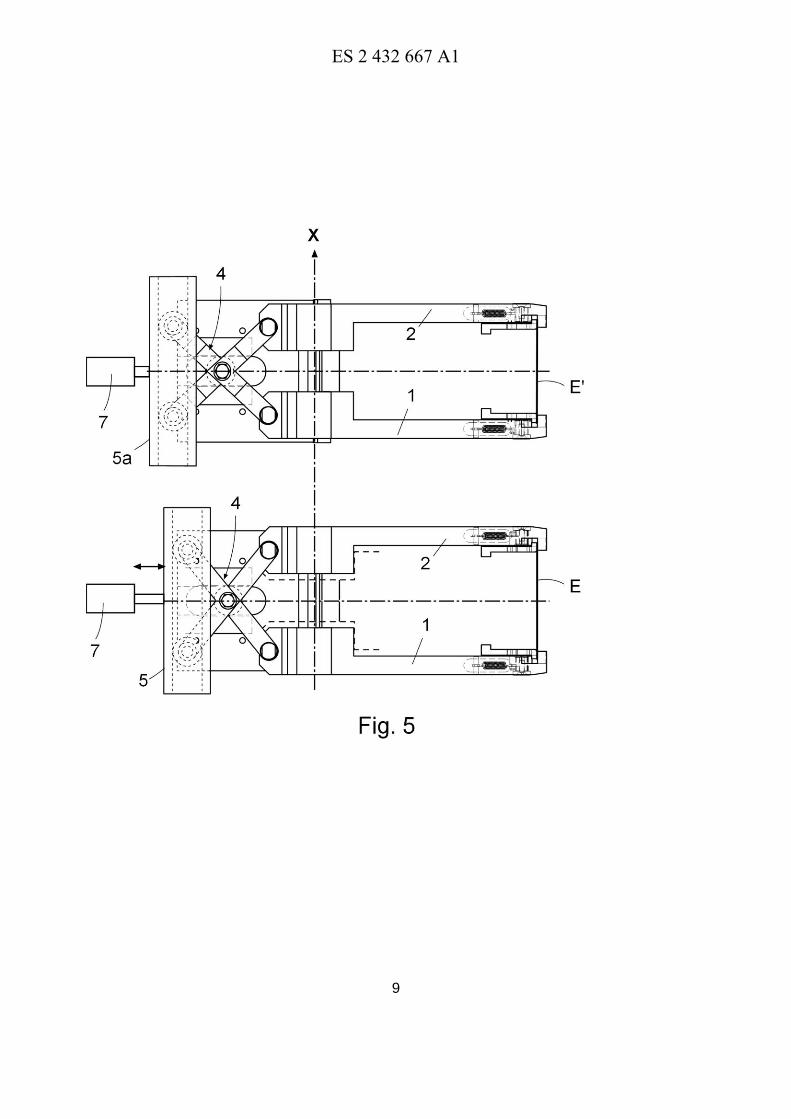
Para complementar la descripción que se está realizando y con objeto de facilitar la comprensión de las características de la invención, se acompaña a la presente memoria descriptiva un juego de dibujos en los que, con carácter ilustrativo y no limitativo, se ha representado lo siguiente: 50 - Las figuras 1 y 2 muestran sendas vistas en perspectiva, superior e inferior, de un ejemplo de realización del dispositivo de transporte de envases flexibles para máquinas envasadoras según la invención. Las figuras 3 y 4 muestran sendas vistas en alzado y en planta superior del mismo dispositivo de transporte de las figuras anteriores, habiéndose representado la figura 4 parcialmente seccionada. 55 La figura 5 muestra una vista en planta del dispositivo de transporte en dos posiciones operativas soportando dos envases flexibles de diferente formato. La figura 6 muestra una vista en planta del dispositivo de transporte en dos posiciones operativas durante el transporte 60 de un envase flexible y con los brazos paralelos con diferentes separaciones, realizando la apertura y el cierre de la
ES 2 432 667 A1
4
boca del envase. Realización preferente de la invención.
En el ejemplo mostrado el dispositivo de transporte comprende dos brazos (1, 2) paralelos, que disponen en los 5 laterales enfrentados sendas pinzas (11, 21) para la sujeción de los envases flexibles a transportar. Dichos brazos se encuentran montados, por su extremo posterior y con posibilidad de desplazamiento respecto a una pieza de soporte (3) provista a tal efecto de una guía longitudinal (31). 10 Esta pieza de soporte es adecuada para acoplarse a un transportador sinfín (no representado) propio de la máquina envasadora encargado de desplazar el dispositivo de transporte por diferentes estaciones de trabajo de dicha máquina envasadora. Para regular la separación entre cada pareja de brazos (1, 2) el dispositivo comprende un mecanismo de tijera (4) 15 constituido por dos barras (41, 42) relacionadas por su zona intermedia mediante un eje vertical (43). Los extremos anteriores de las barras (41, 42) se encuentran articuladas sobre los extremos posterior de los brazos (1, 2) paralelos mediante sendos ejes verticales (44, 45) de giro; disponiendo los extremos posteriores de dichas barras (41, 42) de sendos medios de rodadura (46, 47) para la actuación de unos tramos de guía (5, 5a, ...) 20 distribuidos en la máquina envasadora, paralelamente al recorrido del dispositivo de transporte, de forma que, en función de la posición más o menos avanzada de los tramos de guía (5, 5a,...) se consigue que el mecanismo de tijera (4) presente una longitud variable y consiguientemente que los brazos (1, 2) paralelos se acerquen o alejen entre sí en mayor o menor medida. 25 Los mencionados tramos de guía (5, 5a, ...) disponen de una pista longitudinal (51) para el guiado de los medios de rodadura (46, 47) del dispositivo de transporte de los envases. El eje vertical (43) que relaciona las dos barras (41, 42) del mecanismo de tijera está provisto inferiormente de unos medios de guiado respecto a la pieza de soporte; encontrándose representados dichos medios de guiado por un 30 elemento de rodadura (6) alojado en un orificio coliso (32) definido en la placa de soporte (3) y orientado en dirección perpendicular a la dirección de desplazamiento de los brazos (1, 2). Como se muestra en la figura 5, en función de la posición de los tramos de guía (5, 5a) los brazos paralelos (1, 2) se dispondrán con diferente separación permitiendo que la máquina envasadora pueda trabajar con envases (E, E’) de 35 diferente formato. Como se puede observar en la figura 6, una vez posicionados tramos de guía (5, 5a) de forma adecuada para trabajar con un determinado formato de envase (E) este dispositivo de transporte se desplazará longitudinalmente, en la dirección del eje (X), por la acción de un transportador sinfín (no representado), pasando los medios de guiado (46, 40 47) montados sobre los extremos posteriores del mecanismo de tijera (4) por sucesivos tramos de guía (5, 5a) que se disponen en una posición más o menos avanzada por la acción de unos medios actuadores (7) de cualquier tipo. En función de las posiciones de los tramos de guía (5, 5a, ...) se consigue variar la longitud del mecanismo de tijera (4), y la separación entre los brazos (1, 2) paralelos, en una medida adecuada para realizar la apertura y el cierre de la 45 boca del envase (E) sujetado por las pinzas (11, 21). Por tanto, tal como se deduce de las figuras 5 y 6 el dispositivo de transporte de la invención permite variar la separación entre los brazos paralelos (1, 2) tanto para trabajar con diferentes formatos de envases (E, E’) como para provocar la apertura y cierre de la boca del formato de envase (E) elegido en diferentes estaciones de trabajo de la 50 máquina envasadora. Una vez descrita suficientemente la naturaleza de la invención, así como un ejemplo de realización preferente, se hace constar a los efectos oportunos que los materiales, forma, tamaño y disposición de los elementos descritos podrán ser modificados, siempre y cuando ello no suponga una alteración de las características esenciales de la 55 invención que se reivindican a continuación.
ES 2 432 667 A1
5
REIVINDICACIONES
1.- Dispositivo de transporte de envases flexibles para máquinas envasadoras; siendo dicho dispositivo adecuado para acoplarse a un transportador sinfín encargado de desplazarlo a lo largo de las diferentes estaciones de trabajo de una máquina envasadora, y comprendiendo dicho dispositivo de transporte al menos una pareja de brazos 5 (1, 2) paralelos que presentan en los laterales enfrentados unas pinzas (11, 21) para la sujeción de los envases (E) a transportar y unos medios de regulación de separación entre los brazos (1, 2) paralelos; caracterizado porque: los
brazos paralelos (1, 2) de cada pareja se encuentran montados con posibilidad desplazamiento longitudinal respecto a una pieza de soporte (3) adecuada para fijarse a un transportador sinfín de la máquina envasadora, y porque los medios de regulación de la separación entre cada pareja de brazos (1, 2) comprende: 10 - un mecanismo de tijera (4) dispuesto en un plano paralelo al definido por la pareja de brazos (1, 2) paralelos, y que comprende dos barras (41, 42) relacionadas entre sí por una zona intermedia mediante un eje vertical (43) de giro; comprendiendo dichas barras (41, 42) sendos extremos anteriores articulados mediante sendos ejes verticales (44, 45) de giro al extremo posterior de los brazos (1. 2) paralelos; y sendos extremos posteriores portadores de unos 15 medios de rodadura (46, 47); - unos tramos de guía (5, 5a, ...) distribuidos en la máquina envasadora, paralelamente al recorrido del dispositivo de transporte y provistos de una pista longitudinal (51) para el guiado de los medios de rodadura (46, 47) del mecanismo de tijera (4) asociados a cada pareja de brazos (1, 2) paralelos. 20 - unos medios actuadores (7) adecuados para desplazar cada tramo de guía (5, 5a) en dirección transversal y disponerla en una posición adecuada para determinar mediante una variación de longitud de los mecanismos de tijera (4), la separación de cada pareja de brazos (1, 2) paralelos en cada zona del recorrido del dispositivo de transporte. 25 2,. Dispositivo, según la reivindicación 1, caracterizado porque eje vertical de giro que relacionada las
barras del mecanismo de tijera por su zona intermedia está provisto de unos medios de guiado respecto a la pieza de soporte en una dirección perpendicular a la dirección de desplazamiento longitudinal de los brazos paralelos (1, 2) . 3.- Dispositivo, según la reivindicación 2, caracterizado porque los medio de guiado del eje vertical de 30 giro de las barras comprende un elemento de rodadura (6) alojado en un orificio coliso (32) definido en la placa de soporte (3) y orientado en dirección perpendicular a la dirección de desplazamiento de los brazos (1, 2).
ES 2 432 667 A1
6
ES 2 432 667 A1

7
ES 2 432 667 A1

8
ES 2 432 667 A1
9
ES 2 432 667 A1

10
ES 2 432 667 A1

OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
21 N.º solicitud: 201330961
22 Fecha de presentación de la solicitud: 26.06.2013
32 Fecha de prioridad:
INFORME SOBRE EL ESTADO DE LA TECNICA
51 Int. Cl. : B65B43/46 (2006.01)
DOCUMENTOS RELEVANTES
Categoría
56 Documentos citados
Reivindicaciones
afectadas
A
A
A
A
A
ES 2364171 T3 (TOYO JIDOKI) 26.08.2011, página 5, línea 30 – página 6, línea 45; figuras 1-7. US 5398484 A (KADER) 21.03.1995, resumen; figuras. FR 2650807 A1 (THIMONNIER) 15.02.1991, resumen; figuras. US 4263768 A (RUSSELL et al.) 28.04.1981, resumen; figuras. ES 2395263 A1 (MESPACK) 11.02.2013, resumen; figuras.
1-3
1-3
1-3
1-3
1-3
Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica
O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud
El presente informe ha sido realizado para todas las reivindicaciones
para las reivindicaciones nº:
Fecha de realización del informe
21.11.2013
Examinador
F. Monge Zamorano
Página
1/4
INFORME DEL ESTADO DE LA TÉCNICA
Nº de solicitud: 201330961
Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) B65B Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC
Informe del Estado de la Técnica Página 2/4

OPINIÓN ESCRITA
Nº de solicitud: 201330961
Fecha de Realización de la Opinión Escrita: 21.11.2013 Declaración Novedad (Art. 6.1 LP 11/1986) Reivindicaciones 1-3 SI Reivindicaciones NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones 1-3 SI Reivindicaciones NO
Se considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986). Base de la Opinión.- La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica.
Informe del Estado de la Técnica Página 3/4
OPINIÓN ESCRITA
Nº de solicitud: 201330961
1. Documentos considerados.- A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión.
Documento Número Publicación o Identificación Fecha Publicación D01 ES 2364171 T3 (TOYO JIDOKI) 26.08.2011 D02 US 5398484 A (KADER) 21.03.1995 D03 FR 2650807 A1 (THIMONNIER) 15.02.1991 D04 US 4263768 A (RUSSELL et al.) 28.04.1981 D05 ES 2395263 A1 (MESPACK) 11.02.2013
2. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración El objeto de la solicitud es un dispositivo de transporte de envases flexibles para máquinas envasadoras. La solicitud contiene tres reivindicaciones de las cuales es independiente la primera y dependen de ella en cascada las otras dos. La primera reivindicación caracteriza la invención porque, estando el dispositivo compuesto por una pareja de brazos paralelos con pinzas enfrentadas y medios de regulación de la separación entre ambos, dichos medios de regulación comprenden: a) Un mecanismo de tijera dispuesto en un plano paralelo al definido por la pareja de brazos b) Unos tramos de guía distribuidos en la máquina envasadora para el guiado de los medios de rodadura c) Unos actuadores para desplazar cada tramo de guía en dirección transversal Realizada la búsqueda pertinente no se han encontrado en el estado de la técnica dispositivos de transporte para envases flexibles en los que el mecanismo de regulación de apertura o cierre del dispositivo prensor sea un mecanismo de tijera. Así, los documentos citados en el IET, que se consideran los más cercanos a la invención en el estado de la técnica, divulgan diferentes realizaciones de dispositivos que cumplen la misma función que la invención objeto de esta solicitud: prensión y transporte de bolsas y envases flexibles análogos, pero con soluciones técnicas distintas para los diferentes movimientos de brazos y pinzas. Teniendo, pues, en cuenta las consideraciones precedentes, de acuerdo con lo previsto en la vigente Ley de Patentes 11/1986 y en opinión del examinador, cabría reconocer los atributos de novedad, en el sentido del artículo 6, y de actividad inventiva, en el sentido del artículo 8 de dicha Ley a las reivindicaciones primera a tercera de la solicitud.
Informe del Estado de la Técnica Página 4/4