142 Grupo
26
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA (UNAD) TECNOLOGIA ELECTRONICA 208006- SISTEMAS EMBEBIDOS GRUPO 142 TRABAJO COLABORATIVO 1 TUTORA OSCAR IVAN VALDERRAMA ERICK UYOQUE GIRALDO 13.568.734
-
Upload
erick-uyoque-giraldo -
Category
Documents
-
view
57 -
download
0
Transcript of 142 Grupo

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA(UNAD)
TECNOLOGIA ELECTRONICA
208006- SISTEMAS EMBEBIDOSGRUPO 142
TRABAJO COLABORATIVO 1
TUTORAOSCAR IVAN VALDERRAMA
ERICK UYOQUE GIRALDO13.568.734
25-SEPTIEMBRE-2013ACACIAS (META)

INTRODUCCION
Este trabajo permite el reconocimiento de los sistemas embebidos, su historia, sus componentes, sus aplicaciones, características y sus diferentes herramientas; también vamos a ver un poco de lo que es las familias de los Microcontroladores y Microprocesadores.Los sistemas embebidos se encuentran disponibles a cada comento de nuestra vida. El horno microondas, el auto, el ascensor, el equipo de audio, el avión son controlados por computadoras que normalmente no poseen una pantalla, un teclado o disco rígido, y no responden a lo que comúnmente denominamos PC.Los sistemas embebidos a pesar de no ser muy nombrados están en muchas partes, en realidad, es difícil encontrar algún dispositivo cuyo funcionamiento no esté basado en algún sistema embebido, desde vehículos hasta teléfonos celulares e incluso en algunos electrodomésticos comunes como refrigeradores y hornos microondas.Los sistemas embebidos suelen tener en una de sus partes una computadora con características especiales conocida como microcontrolador que viene a ser el cerebro del sistema.Este no es más que un microprocesador que incluye interfaces de entrada/salida en el mismo chip. Normalmente estos sistemas poseen un interfaz externo para efectuar un monitoreo del estado y hacer un diagnóstico del sistema.Además cabe reseñar que el uso de sistemas embebidos en productos complejos implica un desafío de la seguridad en TI para proteger la información contenida en el sistema embebido y también la que es transmitida desde y hacia el dispositivo por redes privadas o Internet. Por tanto cabe incluir funciones criptográficas, diseño de protocolos y consultoría en análisis y verificación así como servicios de pruebas de seguridad y evaluaciones específicas para sistemas embebidos.El diseño de un producto que incorpora sistemas embebidos generalmente está orientado a minimizar los costos y maximizar la confiabilidad, pero también es esencial incorporar en el diseño consideraciones de seguridad, incluyendo funciones y protocolos criptográficos que protejan la información durante todas las fases. Los sistemas embebidos a menudo operan en un ambiente dedicado con condiciones operacionales y escenarios muy específicos. Es entonces sumamente importante que dichas condiciones y amenazas sean tomadas en cuenta cuando se diseñan las funciones de seguridad. Como ejemplo, una función o protocolo criptográfico que es aceptado y utilizado en sistemas de propósito general podría ser inadecuado para el ambiente de un sistema embebido, permitiendo a un atacante eludir las funciones de seguridad.Tradicionalmente esto ha sido realizado a través de una terminal serie, pero con el tiempo la industria ha observado las ventajas del monitoreo a distancia, así como también la posibilidad de efectuar pequeños ajustes sin necesidad de estar físicamente en el mismo lugar donde surgen efecto dichos cambios. Debido al uso tan masivo de laWWW, la idea de implementar un interfaz vía TCP/IP para controlar estos sistemas embebidos resulta interesante prácticamente obvia.

DESARROLLO DE LA ACTIVIDAD
1. Fase 1. Sistemas embebidosDescriba el significado, historia, características, componentes y aplicaciones de los sistemas embebidos. Consulte fuentes diferentes al módulo del curso.
SISTEMAS EMBEBIDOS
DEFINICIÓN
Se entiende por sistemas embebidos a una combinación de hardware y software de computadora, sumado tal vez a algunas piezas mecánicas o de otro tipo, diseñado para tener una función específica. Es común el uso de estos dispositivos pero pocos se dan cuenta que hay un procesador y un programa ejecutándose que les permite funcionar.Esto ofrece un contraste con la computadora personal, que si bien también está formada por una combinación de hardware y software más algunas piezas mecánicas (discos rígidos, por ejemplo). Sin embargo la computadora personal no es diseñada para un uso específico. Si no que es posible darle muchos usos diferentes.Muchas veces un sistema embebido es un componente de un sistema mucho más grande, como por ejemplo los sistemas de frenos o el sistema de inyección de combustible, en automóviles actuales son sistemas embebidos.Esta combinación de software y hardware puede ser reemplazada en muchos casos por un circuito integrado que realice la misma tarea. Pero una de las ventajas de los sistemas embebidos es su flexibilidad. Ya que a la hora de realizar alguna modificación resulta mucho más sencillo modificar unas líneas de código al software del sistema embebido que reemplazar todo el circuito integrado.Un uso muy común de los sistemas embebidos es en los sistemas de tiempo real, entendiéndose por sistemas en tiempo real a aquellos sistemas en los que el control del tiempo es vital para el correcto funcionamiento. Los sistemas en tiempo real necesitan realizar ciertas operaciones o cálculos en un límite de tiempo. Donde ese límite de tiempo resulta crucial. Un ejemplo claro de un sistema de tiempo real es el control de tráfico aéreo.
Sistema en Tiempo Real.

HISTORIA DE LOS SISTEMAS EMBEBIDOS
El primer sistema embebido reconocido fue el sistema de guía de Apolo desarrollado por el laboratorio de desarrollo del MIT para las misiones Apolo hacia la luna. Cada vuelo hacia la luna tenía dos de estos sistemas. La función era manejar el sistema de guía inercial de los módulos de excursión lunar. En un comienzo fue considerado como el elemento que más riesgo presentaba en el proyecto Apolo. Este sistema de cómputo fue el primero en utilizar circuitos integrados y utilizaba una memoria RAM magnética, con un tamaño de palabra de 16 bits. El software fue escrito en el lenguaje ensamblador propio y constituía en el sistema operativo básico, pero capaz de soportar hasta ocho tareas simultáneas.El primer sistema embebido producido en masa, fue el computador guía del misil norteamericano Minuteman II en 1962. El principal aspecto de diseño del computador del Minuteman, es que además de estar construido con circuitos integrados, permitía reprogramar los algoritmos de guía del misil para la reducción de errores, y permitía realizar pruebas sobre el misil ahorrando así el peso de los cables y conectores.
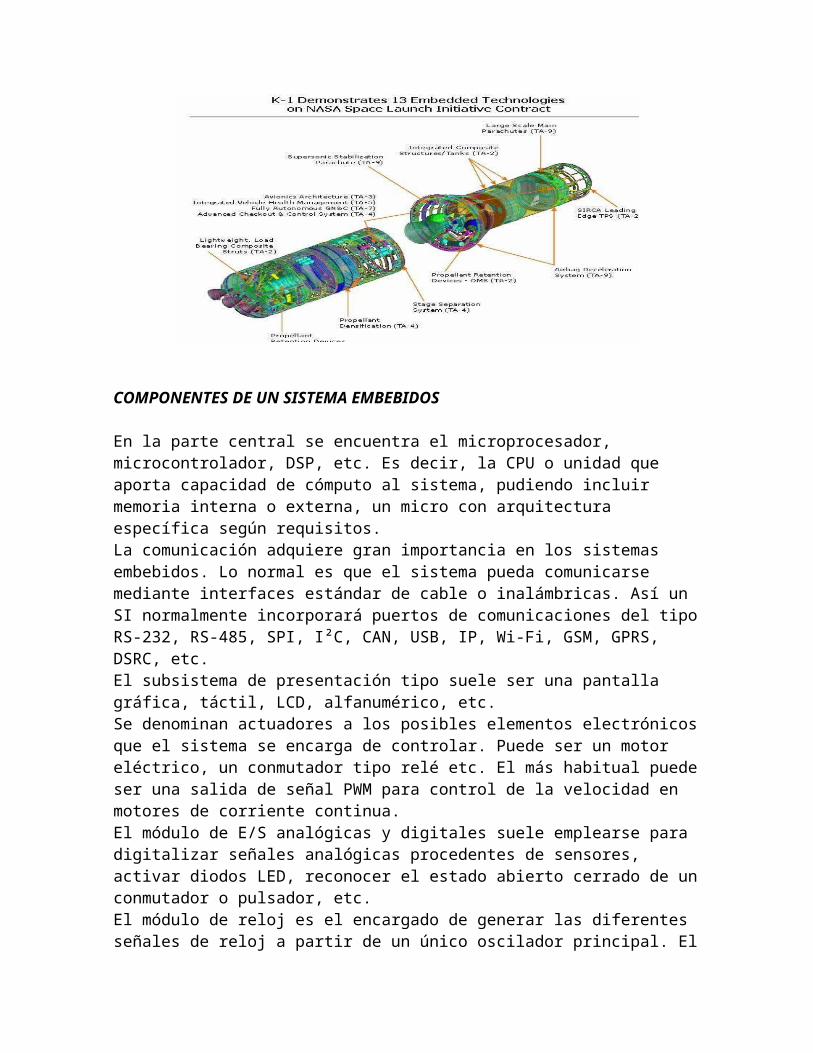
COMPONENTES DE UN SISTEMA EMBEBIDOS
En la parte central se encuentra el microprocesador, microcontrolador, DSP, etc. Es decir, la CPU o unidad que aporta capacidad de cómputo al sistema, pudiendo incluir memoria interna o externa, un micro con arquitectura específica según requisitos.La comunicación adquiere gran importancia en los sistemas embebidos. Lo normal es que el sistema pueda comunicarse mediante interfaces estándar de cable o inalámbricas. Así un SI normalmente incorporará puertos de comunicaciones del tipo RS-232, RS-485, SPI, I²C, CAN, USB, IP, Wi-Fi, GSM, GPRS, DSRC, etc.El subsistema de presentación tipo suele ser una pantalla gráfica, táctil, LCD, alfanumérico, etc.Se denominan actuadores a los posibles elementos electrónicos que el sistema se encarga de controlar. Puede ser un motor eléctrico, un conmutador tipo relé etc. El más habitual puede ser una salida de señal PWM para control de la velocidad en motores de corriente continua.

El módulo de E/S analógicas y digitales suele emplearse para digitalizar señales analógicas procedentes de sensores, activar diodos LED, reconocer el estado abierto cerrado de un conmutador o pulsador, etc.El módulo de reloj es el encargado de generar las diferentes señales de reloj a partir de un único oscilador principal. El tipo de oscilador es importante por varios aspectos: por la frecuencia necesaria, por la estabilidad necesaria y por el consumo de corriente requerido. El oscilador con mejores características en cuanto a estabilidad y coste son los basados en resonador de cristal de cuarzo, mientras que los que requieren menor consumo son los RC. Mediante sistemas PLL se obtienen otras frecuencias con la misma estabilidad que el oscilador patrón.El módulo de energía (power) se encarga de generar las diferentes tensiones y corrientes necesarias para alimentar los diferentes circuitos del SE. Usualmente se trabaja con un rango de posibles tensiones de entrada que mediante conversores ac/dc o dc/dc se obtienen las diferentes tensiones necesarias para alimentar los diversos componentes activos del circuito.Además de los conversores ac/dc y dc/dc, otros módulos típicos, filtros, circuitos integrados supervisores de alimentación, etc.El consumo de energía puede ser determinante en el desarrollo de algunos sistemas embebidos que necesariamente se alimentan con baterías, con lo que el tiempo de uso del SE suele ser la duración de la carga de las baterías.
Componentes Principales de un Sistema Embebido.
APLICACIONES DE UN SISTEMA EMBEBIDO
Los lugares donde se pueden encontrar los sistemas embebidos son numerosos y de varias naturalezas. A continuación se exponen varios ejemplos para ilustrar las posibilidades de los mismos:
En una fábrica, para controlar un proceso de montaje o producción. Una máquina que se encargue de una determinada tarea hoy en día contiene numerosos circuitos electrónicos y eléctricos para el control de motores, hornos, etc. que deben ser gobernados por un procesador, el cual ofrece un interfaz persona – máquina para ser dirigido por un operario e informarle al mismo de la marcha del proceso.
Puntos de servicio o venta (POS, Point Of Service). Las cajas donde se paga la compra en un supermercado son cada vez más completas, integrando teclados numéricos, lectores de códigos de barras mediante láser, lectores de tarjetas bancarias de banda magnética o chip, pantalla alfanumérica de cristal líquido, etc.
El sistema embebido en este caso requiere numerosos conectores de entrada y salida y unas características robustas para la operación continuada.
Puntos de información al ciudadano. En oficinas de turismo, grandes almacenes, bibliotecas, etc. existen equipos con una pantalla táctil donde se puede pulsar sobre la misma y elegir la consulta a realizar, obteniendo una respuesta personalizada en un entorno gráfico amigable.
Decodificadores y set-top boxes para la recepción de televisión. Cada vez existe un mayor número de operadores de televisión que aprovechando las tecnologías vía satélite y de red de cable ofrecen un servicio de televisión de pago diferenciado del convencional. En primer lugar envían la señal en formato digital MPEG-2 con lo que es necesario un procesado para decodificarla y mandarla al televisor. Además viaja cifrada para evitar que la reciban en claro usuarios sin contrato, lo que requiere descifrarla en casa del abonado. También ofrecen un servicio de televisión interactiva o web-TV que necesita de un software específico para mostrar páginas web y con ello un sistema basado en procesador con salida de señal de televisión.
Sistemas radar de aviones. El procesado de la señal recibida o reflejada del sistema radar embarcado en un avión requiere alta potencia de cálculo además de ocupar poco espacio, pesar poco y soportar condiciones extremas de funcionamiento (temperatura, presión atmosférica, vibraciones, etc.).
Equipos de medicina en hospitales y ambulancias UVI – móvil. Máquinas de revelado automático de fotos. Cajeros automáticos. Pasarelas (Gateways) Internet-LAN. Y un sin fin de posibilidades aún por descubrir o en estado embrionario como son
las neveras inteligentes que controlen su suministro vía Internet, PC de bolsillo, etc.
2. Fase 2. MicroprocesadoresRealice una investigación sobre los más recientes microprocesadores, donde describa sus características, componentes y arquitecturas.
MICROPROCESADORES
Un microprocesador es el cerebro de una computadora. Que va sobre un elemento llamado zócalo (en inglés es socket) o están soldados en la placa. El microprocesador está compuesto por miles o millones, que contiene el ordenador.
TIPO DE MICROPROCESADORESADM e Intel son los únicos dos tipos de chips que abarcan la diversidad en el mercado.Las características más importantes son:
Números de Núcleos: entre más núcleo un microprocesador, mayor cantidad de información será procesada al mismo tiempo.
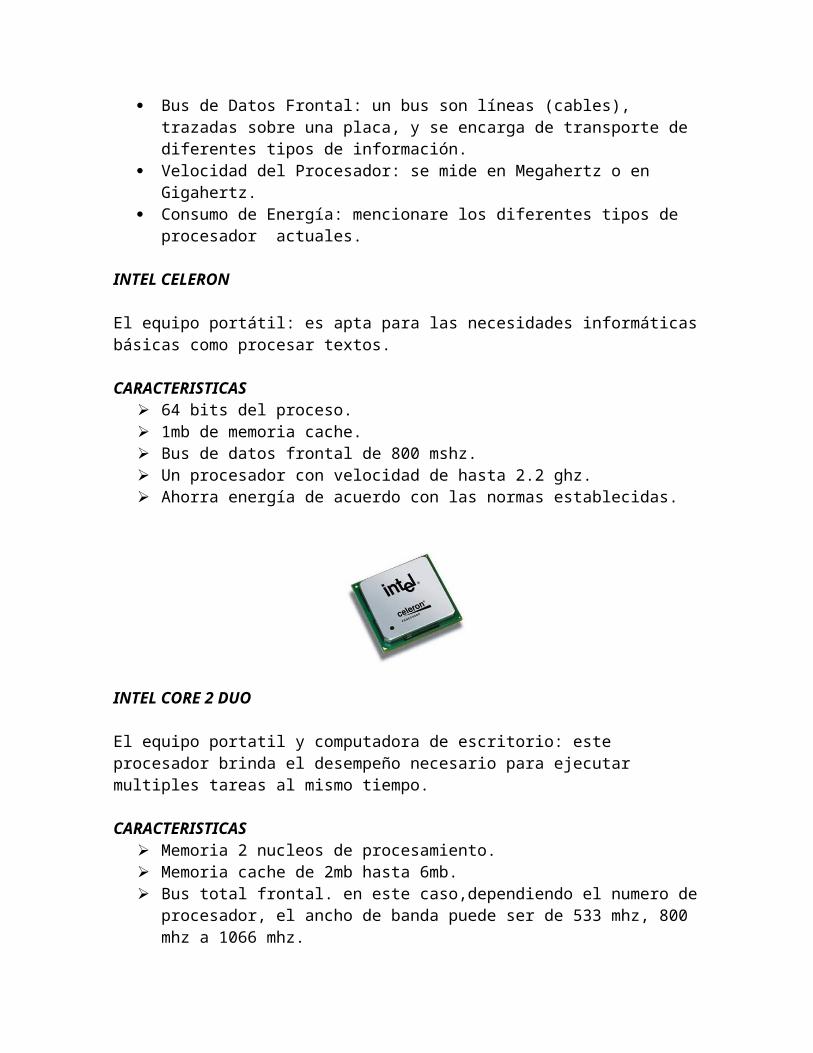
Memoria Cache: es una memoria ultrarrápida utilizada por el microprocesador. Bus de Datos Frontal: un bus son líneas (cables), trazadas sobre una placa, y se
encarga de transporte de diferentes tipos de información. Velocidad del Procesador: se mide en Megahertz o en Gigahertz. Consumo de Energía: mencionare los diferentes tipos de procesador actuales.

INTEL CELERON
El equipo portátil: es apta para las necesidades informáticas básicas como procesar textos.
CARACTERISTICAS 64 bits del proceso. 1mb de memoria cache. Bus de datos frontal de 800 mshz. Un procesador con velocidad de hasta 2.2 ghz. Ahorra energía de acuerdo con las normas establecidas.
INTEL CORE 2 DUO
El equipo portatil y computadora de escritorio: este procesador brinda el desempeño necesario para ejecutar multiples tareas al mismo tiempo.
CARACTERISTICAS Memoria 2 nucleos de procesamiento. Memoria cache de 2mb hasta 6mb. Bus total frontal. en este caso,dependiendo el numero de procesador, el ancho de
banda puede ser de 533 mhz, 800 mhz a 1066 mhz.
INTEL CORE 2 QUAD
Equipo Portátil y computadora de escritorio: fue diseñado con el fin de que su desempeño sea procesar entretenimientos como: videojuegos de alto nivel, editar videos, fotografías, reproducir películas y música.
CARACTERISTICAS

4 núcleos Memoria cache de 4 mb, 6mb y 12 mb. Bus de datos frontal de 800 mhz y 1066 mhz. Procesador con velocidad de 2.53 ghz, 2,60ghz, 2.80ghz y 3.06 ghz.
INTEL CORE I3
Este microprocesador utiliza la tecnología hyper thereading.
CARACTERISTICAS Procesador de dos núcleos. Memoria cache de 3mb. Velocidad ddr3 de 800mhsz hasta 1066mhz. ddr3 es la habilidad de hacer
trasferencia de datos ocho veces más rápido. Procesador con velocidad de 2.13ghz y 2.2ghz.
INTEL CORE I5
Es para uso cotidiano, es posible trabajar en dos tareas a la vez, y tienen la capacidad de aumentar su velocidad.
CARACTERISTICAS Posee 4 vías con impulso de velocidad. 8mb de memoria cache. Velocidad ddr3 de 1333 mshz. Procesador con velocidad de 2.53 ghz.

INTEL CORE I7
Es apropiada para editar videos y fotografías, divertirse con juegos y por supuesto trabajar en varios al tiempo.
CARACTERISTICAS Posee un núcleo Memoria cache de 4mb, 6mb y 8mb. Velocidad ddr3 de 800mhz, 1066 mghz y 1333 mgz. Procesador con velocidad de 3.06 ghz, 2.93 ghz y 2.66 ghz por nucleo.
INTEL ATOM
Se puede realizar las operaciones básicas, como escribir textos y navegar por internet desde cualquier sitio.
CARACTERISTICAS Posee un núcleo. Memoria cache de 512kb. Un bus de datos frontal de 667 mhz. Velocidad del procesador de 1.66 mhz.
AMD PHENOM II: X3 Y X4
Es ideal para entretenimientos en alta definición como, juegos, editar video y fotografía.
CARACTERISTICAS Está formando de tres a 4 núcleos. Memoria cache de 4mb y 6 mb. Un bus de datos frontal de 1066 mhz. 32 y 64 bits de proceso.
AMD ATHLON II X2
Convierte de una manera rápida la música y los videos a otros formatos.
CARACTERISTICAS Posee 2 núcleos. Memoria cache de 2mb. 32 y 64 bits de proceso.
AMD SEMPROM
Es capaz de realizar varias tareas a la vez, ideal para la reproducción de video y música.
CARACTERISTICAS Memoria ddr2 de 2gb, expandible hasta 4gb, esta memoria es la que permite llevar a
cabo varias tareas al mismo tiempo. Tiene una memoria cache l2 de 512 kb. Un bus de datos frontal de 1600 mhz. Velocidad del procesador de hasta 2.3 ghz.

3. Fase 3. Microcontroladores.Realice una investigación sobre microcontroladores, describa su diferencia respecto a los microprocesadores, enumere las familias y sus respectivas características, describa que es un PIC y sus características.
MICROCONTROLADORES
Un microcontrolador es un circuito integrado de alta escala de integración que incorpora la mayor parte de los elementos que configuran un controlador.Un microcontrolador dispone normalmente de los siguientes componentes:
Procesador o UCP (Unidad Central de Proceso). Memoria RAM para Contener los datos. Memoria para el programa tipo ROM/PROM/EPROM. Líneas de E/S para comunicarse con el exterior. Diversos módulos para el control de periféricos (temporizadores, Puertas Serie y
Paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores Digital/Analógico, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de todo el sistema.
Los productos que para su regulación incorporan un microcontrolador disponen de las siguientes ventajas:
Aumento de prestaciones: un mayor control sobre un determinado elemento representa una mejora considerable en el mismo.
Aumento de la fiabilidad: al reemplazar un elevado número de elementos por el microcontrolador disminuye el riesgo de averías y se precisan menos ajustes.
Reducción del tamaño en el producto acabado: La integración del microcontrolador en un chip disminuye el volumen, la mano de obra y los stocks.
Mayor flexibilidad: las características de control están programadas por lo que su modificación sólo necesita cambios en el programa de instrucciones.
El microcontrolador es en definitiva un circuito integrado que incluye todos los componentes de un computador. Debido a su reducido tamaño es posible montar el controlador en el propio dispositivo al que gobierna. En este caso el controlador recibe el nombre de controlador empotrado (embedded controller).
DIFERENCIA ENTRE MICROPROCESADOR Y MICROCONTROLADOR.
El microprocesador es un circuito integrado que contiene la Unidad Central de Proceso (UCP), también llamada procesador, de un computador. La UCP está formada por la Unidad de Control, que interpreta las instrucciones, y el Camino de Datos, que las ejecuta.Las patitas de un microprocesador sacan al exterior las líneas de sus buses de direcciones, datos y control, para permitir conectarle con la Memoria y los Módulos de E/S y configurar un computador implementado por varios circuitos integrados. Se dice que un microprocesador es un sistema abierto porque su configuración es variable de acuerdo con la aplicación a la que se destine.

Estructura de un sistema abierto basado en un microprocesador. La disponibilidad de los buses en el exterior permite que se configure a la medida de la aplicación.
Si sólo se dispusiese de un modelo de microcontrolador, éste debería tener muy potenciados todos sus recursos para poderse adaptar a las exigencias de las diferentes aplicaciones. Esta potenciación supondría en muchos casos un despilfarro. En la práctica cada fabricante de microcontroladores oferta un elevado número de modelos diferentes, desde los más sencillos hasta los más poderosos. Es posible seleccionar la capacidad de las memorias, el número de líneas de E/S, la cantidad y potencia de los elementos auxiliares, la velocidad de funcionamiento, etc. Por todo ello, un aspecto muy destacado del diseño es la selección del microcontrolador a utilizar.
El microcontrolador es un sistema cerrado. Todas las partes del computador están contenidas en su interior y sólo salen al exterior las líneas que gobiernan los periféricos.
FAMILIA DE MICROCONTROLADORES.
Existen muchas familias fabricantes de microcontroladores, entre las más comunes están:
Atmel (AVR), Hitachi (H8), Intel de 8 bits (8XC42, MCS51, 8xC251) o Intel de 16 bits (MCS96, MXS296), National Semiconductor (COP8), Microchip, Motorola de 8 bits (68HC05, 68HC08, 68HC11) o de 16 bits (68HC12, 68HC16) o de 32 bits (683xx), NEC (78K), Texas Instruments (TMS370) y Zilog (Z8, Z86E02).Sin embargo en nuestro medio se destacan sólo dos de ellas: la empresa Motorola y la empresa Microchip.
LA FAMILIA MOTOROLA FREESCALEEsta familia, desarrollada por la casa Motorola, se divide en las siguientes subfamilias:

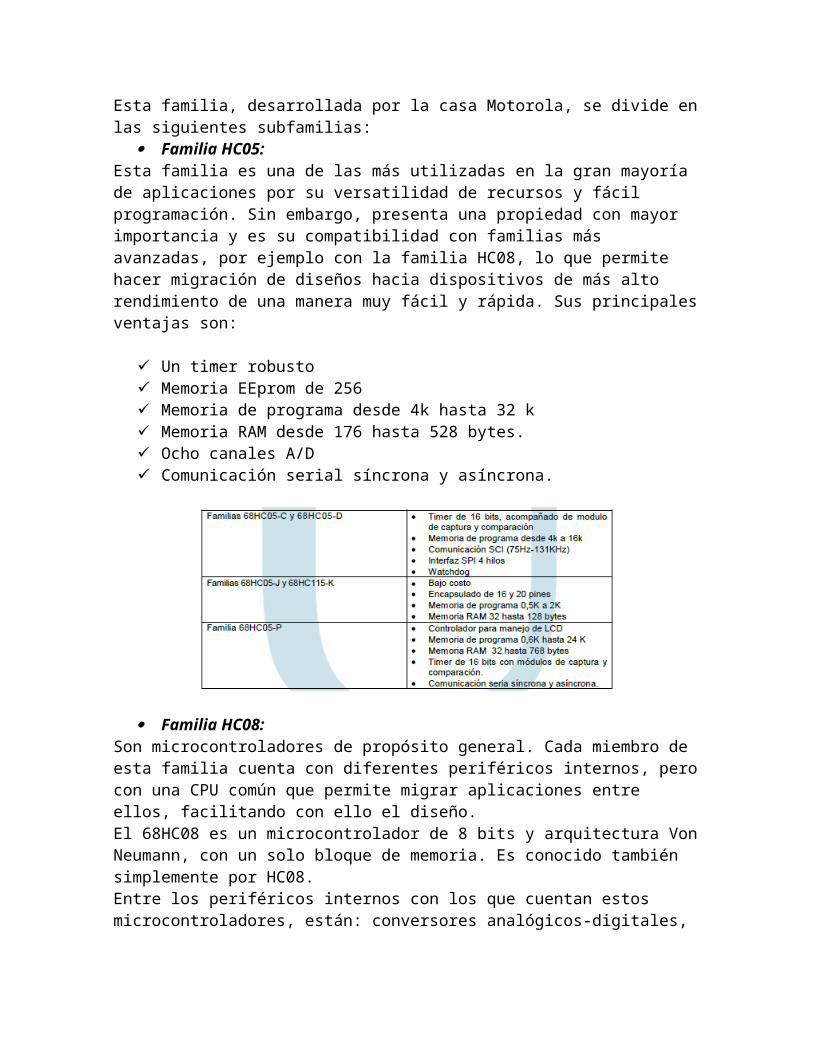
Familia HC05:Esta familia es una de las más utilizadas en la gran mayoría de aplicaciones por su versatilidad de recursos y fácil programación. Sin embargo, presenta una propiedad con mayor importancia y es su compatibilidad con familias más avanzadas, por ejemplo con la familia HC08, lo que permite hacer migración de diseños hacia dispositivos de más alto rendimiento de una manera muy fácil y rápida. Sus principales ventajas son:
Un timer robusto Memoria EEprom de 256 Memoria de programa desde 4k hasta 32 k Memoria RAM desde 176 hasta 528 bytes. Ocho canales A/D Comunicación serial síncrona y asíncrona.
Familia HC08:Son microcontroladores de propósito general. Cada miembro de esta familia cuenta con diferentes periféricos internos, pero con una CPU común que permite migrar aplicaciones entre ellos, facilitando con ello el diseño.El 68HC08 es un microcontrolador de 8 bits y arquitectura Von Neumann, con un solo bloque de memoria. Es conocido también simplemente por HC08.Entre los periféricos internos con los que cuentan estos microcontroladores, están: conversores analógicos-digitales, módulo de control de tiempos y sistemas de comunicación como SPI, I²C, USB o SSCI entre otros.
Familia 68HC11 (abreviado HC11 o 6811)Es una familia de microcontroladores de Motorola, derivada del microprocesador Motorola 6800. Los microcontroladores 68HC11 son más potentes y costosos que los de la familia 68HC08 y se utilizan en múltiples dispositivos empotrados.Siguen la arquitectura Von Newman. Internamente, el conjunto de instrucciones de la familia 68HC11 es compatible con la de la mayoría de sus predecesores. La familia 68HC11 emplea instrucciones de longitud variable y se considera que emplea una arquitectura CISC. Tienen dos acumuladores de ocho bits (A y B), dos registros índice de 16 bits (X e Y), un registro de banderas, un puntero de pila y un contador de programa.Los 68HC11 tienen cinco puertos externos (A, B, C, D y E), cada uno de ocho bits excepto el E, que es generalmente de seis bits. El puerto A se emplea en captura de eventos, salida
comparada, acumulador de pulsos y otras funciones de reloj. El puerto D para E/S serie y el puerto E como conversor analógico-digital.La familia 68HC11 puede funcionar tanto con memoria interna o externa. En caso de emplear memoria externa, los puertos B y C funcionan como bus de datos y direcciones respectivamente. Últimos Microcontroladores de la Familia Freescale.
Familia “ultra bajo costo” RS08, con sus modelos MC9RS08KA2 y MC9RS08KA1.
Dispositivos de la familia HC908 con capacidades de memoria hasta de 16k, entre los cuales están. MC68HC908QTxA/QYxA, MC68HC908QLxx, MC68HC908QC16xx, MC68HC908GRxxA, MC68HC908QB8 y MC68HC908JL16.
Existen novedades en la familia HC9S08, de bajo consumo con los dispositivos MC9S08QG8/4 y MC9S08AWxx.
LA FAMILIA PIC
Esta familia, desarrollada por la casa Microchip, se divide en varias gamas: enana, baja, media y alta.Las principales diferencias entre estas gamas radica en el número de instrucciones y su longitud, el número de puertos y funciones, lo cual se refleja en el encapsulado, la complejidad interna y de programación, y en el número de aplicaciones.
Gama EnanaSu principal característica es su reducido tamaño, al disponer todos sus componentes de 8 pines. Se alimentan con un voltaje de corriente continua comprendido entre 2,5 V y 5,5 V, y consumen menos de 2 mA cuando trabajan a 5 V y 4 MHz. El formato de sus instrucciones puede ser de 12 o de 14 bits y su repertorio es de 33 o 35 instrucciones, respectivamente. En la Figura se muestra el diagrama de pines de uno de estos PIC.
PIC Gamma Baja o Enana PIC12Cxxx
Aunque los PIC enanos sólo tienen 8 pines, pueden destinar hasta 6 como líneas de E/S para los periféricos porque disponen de un oscilador interno R-C, lo cual es una de su principales características. En la siguiente tabla se presentan las principales características de los modelos de esta subfamilia. En los modelos 12C5xx el tamaño de las instrucciones es de 12 bits; mientras que en los 12C6xx sus instrucciones tienen 14 bits. Los modelos 12F6xx poseen memoria Flash para el programa y EEPROM para los datos.
TABLA GAMMA ENANA PIC

Gama BajaSe trata de una serie de PICs de recursos limitados, pero con una de la mejores relaciones costo/prestaciones. Sus versiones están encapsuladas con 18 y 28 pines y pueden alimentarse a partir de una tensión de 2,5 V, lo que los hace ideales en las aplicaciones que funcionan con pilas, teniendo en cuenta su bajo consumo (menos de 2 mA a 5 V y 4 MHz). Tienen un repertorio de 33 instrucciones cuyo formato consta de 12 bits. En la Figura se muestra el diagrama de pines de uno de estos PICs.
PIC Gamma Media PIC16Cxx
Al igual que todos los miembros de la familia PIC16/17, los componentes de la gama baja se caracterizan por poseer los siguientes recursos: Sistema Power On Reset, Perro guardián (Watchdog o WDT), Código de protección, etc. Sus principales desventajas o limitaciones son que la pila sólo tiene dos niveles y que no admiten interrupciones. En la siguiente tabla se presentan las principales características de los modelos de esta subfamilia.
TABLA GAMMA BAJA PIC
Gamma Media

Es la gama más variada y completa de los PIC. Abarca modelos con encapsulado desde 18 pines hasta 68, cubriendo varias opciones que integran diversos periféricos. En esta gama sus componentes añaden nuevas prestaciones a las que poseían los de la gama baja, haciéndoles más adecuados en las aplicaciones complejas. Admiten interrupciones, poseen comparadores de magnitudes analógicas, convertidores A/D, puertos serie y diversos temporizadores. El repertorio de instrucciones es de 35, compatible con el de la gama baja. Sus distintos modelos contienen todos los recursos que se precisan en las aplicaciones de los microcontroladores de 8 bits. También dispone de interrupciones y una pila de 8 niveles que permite el anidamiento de subrutinas.
PIC Gamma Alta PIC17CXX
En la siguiente tabla se presentan las principales características de algunos de los modelos de esta familia.
TABLA GAMMA MEDIA PIC
Gama Alta: PIC17CXXX

En esta gama se alcanzan las 58 instrucciones de 16 bits en el repertorio y sus modelos disponen de un sistema de gestión de interrupciones vectorizadas muy potente. También incluyen variados controladores de periféricos, puertos de comunicación serie y paralelo con elementos externos, un multiplicador hardware de gran velocidad y mayores capacidades de memoria, que alcanza los 8K palabras en la memoria de instrucciones y 454 bytes en la memoria de datos. Quizás la característica más destacable de los componentes de esta gama es su arquitectura abierta, que consiste en la posibilidad de ampliación del microcontrolador con elementos externos. Para este fin, los pines comunican al exterior las líneas de los buses de datos, direcciones y control, a las que se conectan memorias o controladores de periféricos. Esta facultad obliga a estos componentes a tener un elevado número de pines comprendido entre 40 y 44. Esta filosofía de construcción del sistema es la que se empleaba en los microprocesadores y no suele ser una práctica habitual cuando se emplean microcontroladores. En la siguiente tabla se presentan las características más relevantes de los modelos de esta gama, que sólo se utilizan en aplicaciones espaciales.
TABLA GAMMA ALTA PIC
La literatura sobre PIC es extensa, se encuentra material aceptable en la red y en librerías especializadas.
CONCLUSION
Como vemos este trabajo se basa en el reconocimiento de los Sistemas Embebidos, un breve recorrido en los Microcontroladores y Microprocesadores.Los Sistemas Embebidos son dispositivos usados para controlar equipos, operación de maquinarias o plantas industriales completas. El término “embebido” (también se lo conoce como “incrustado” o “embutido”) está caracterizando que esos circuitos integrados son una parte integral del sistema en que se encuentran. Lo interesante de que un sistema sea “embebido” es que puede estar de tal forma incrustado, puede quedar tan oculto a nuestros ojos, que la presencia de tales “chips” no resulte nada obvia a quien lo mira.Ha sido tanto el avance en el sector de tecnologías de la información y la comunicación que hoy en día nos vemos beneficiados en ello, teniendo la posibilidad de escoger dispositivos que se adapten a nuestras necesidades y a los requerimientos planteados para la elaboración o la puesta en marcha de proyectos de automatización, o para el manejo adecuado y eficiente de datos.Es así que los es de gran importancia establecer cuáles son las principales diferencias y ventajas de los Microcontroladores y Microprocesadores, dispositivos que hoy en día tienen amplio campo de acción y que de una u otra forma representan gran parte del desarrollo tecnológico que se viene dando.Cada uno de ellos posee un sector de aplicación distinto en donde cada uno establece algunos requerimientos de trabajo así como también poseen especificaciones para su manejo dependiendo de las aplicaciones en las cuales se van a utilizar.
INTRODUCCION

Wikipedia La Enciclopedia Libre. (2013). Sistemas Embebidos. Recuperado de http://es.wikipedia.org/wiki/Sistema_embebido#Aplicaciones_de_un_sistema_embebido.
Galiana Linares A. N. (2005). Sistemas Embebidos. Recuperado de http://server-die.alc.upv.es/asignaturas/PAEEES/2005-06/A07%20-%20Sistemas%20Embebidos.pdf.
Bienvenido a www.jhonyFHJ.blogspot.com. (2013). TIPOS DE MICROPROCESADORES ACTUALES. Recuperado de http://jhonyfhj.blogspot.com/2013/04/tipos-de-microprocesadores-actuales.html.
Monografias.com. (2013). Microcontroladores Genéricos. Recuperado de http://www.monografias.com/trabajos34/microcontroladores-genericos/microcontroladores-genericos.shtml.
Villamil González H. U., y Pinto Aparicio M. (2009). Familia de Microcontroladores. En 309696 - MODULO DE MICROPROCESADORES & MICROCONTROLADORES (pp. 151-160). Chiquinquirá: UNAD.