01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf

of 21
-
Upload
hugo-kstelblanco-r -
Category
Documents
-
view
237 -
download
0
Transcript of 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
1/21
ELABORADO POR:
HUGO ARMANDOO CASTELBLANCO RUEDA - 2168145
DIEGO FERNANDO VARGAS MARTÍNEZ – 2168165
DOCENTE:
Ing. C, Sc., PhD. OSCAR JAVIER BEGAMBRE C.
UNIVERSIDAD INDUSTRIAL DE SANTANDER
ESPECIALIZACIÓN EN ESTRUCTURAS
VI COHORTE
2016
Mecánica del Medio ContinuoTaller Aplicativo
https://www.google.es/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0ahUKEwid2uKa9b3LAhVFGx4KHS2MB-EQjRwIBw&url=https://en.wikipedia.org/wiki/Augustin-Louis_Cauchy&psig=AFQjCNEGH5W2nVCYRMZKNp3wlQ3O-U3UVg&ust=1457967171898193
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
2/21
Mecánica del Medio Continuo | Taller Aplicativo 1
CONTENIDO
1. INTRODUCCIÓN ........................................................................................................................... 2
2. OBJETIVOS ................................................................................................................................... 3
3. EJERCICIOS ................................................................................................................................... 4
3.1. EJERCICIO DE ESFUERZOS .................................................................................................... 4
3.2. EJERCICIO DE ALGEBRA TENSORIAL-SÍMBOLO DE PERMUTACIÓN ..................................... 7
3.3. EJERCICIO DE ALGEBRA TENSORIAL-SÍMBOLO DE PERMUTACIÓN ..................................... 9
3.4. EJERCICIO TRANSFORMACIÓN DE COORDENADAS .......................................................... 11
4. CONCLUSIONES ......................................................................................................................... 20
5. BIBLIOGRAFÍA ............................................................................................................................ 20
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
3/21
Mecánica del Medio Continuo | Taller Aplicativo 2
1. INTRODUCCIÓN
Para analizar el comportamiento físico de solidos deformables, solidos rígidos y fluidos, esindispensable utilizar metodologías que faciliten su estudio, para esto se modela dichofenómeno como un modelo matemático. La Teoría del continuo permitirá la investigaciónde los fenómenos a partir de ciertas dimensiones mínimas, estos valores límitedependerán del material y del fenómeno en estudio; por ejemplo, en el análisis de losestados de esfuerzos y deformaciones de una partícula P sumergida en un fluido. Elpresente taller analizará los esfuerzos debido a la tensión o tensiones de los tensores,además la aplicación de notaciones y convenciones que simplificarán las operaciones deálgebra tensorial, y finalmente se aplicará el método de transformación de coordenadas,
teniendo en cuenta que está basado en el álgebra vectorial y los formalismos del álgebrade tensores.
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
4/21
Mecánica del Medio Continuo | Taller Aplicativo 3
2. OBJETIVOS
Aplicar los conceptos de la mecánica del medio continuo para la solución deproblemas relacionados con los estados de esfuerzos en determinados
puntos del cuerpo.
Aplicar el concepto de símbolo de permutación para simplificar operacionesde determinantes y producto cruz entre vectores.
Emplear un método que tenga como fin realizar una trasformación de lascomponentes de esfuerzo, en las direcciones de un nuevo sistema decoordenadas arbitrario.
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
5/21
Mecánica del Medio Continuo | Taller Aplicativo 4
3. EJERCICIOS
3.1. EJERCICIO DE ESFUERZOSSabiendo que la distribución de tensiones en un cuerpo está dada por:
= − + 0 00 − + 00 0 − + , ,
a) Calcular la distribución de tensiones en las seis caras del bloque.
Cuando x=0 y aplicando la ecuación de Couchy
= ∗
= − + 0 00 − + 00 0 − + ∗ {−100 }
= { + 00 }
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
6/21
Mecánica del Medio Continuo | Taller Aplicativo 5
= → {100} = { + 00 }
= 0 → = {0
− 0 }
= → = {0−+0 }
= 0 → = {00 − }
= → = { 00−+}
b) Calcular la resultante que actúa en las caras y=0 y x=0.
Se debe conocer la distribución de esfuerzos y el área donde esta aplicada.
Figura 1: Distribución de esfuerzos
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
7/21
Mecánica del Medio Continuo | Taller Aplicativo 6
Cuando Y=0
= ∫ ∙ − ∫ ∫ ∙
= ∫ ∫ ∙ = | ∗ | = ∗ = ∗ ∗̂
Cuando x=0
= ∫ ∫ −
= ∫ ∫
− ∫ ∫
=(| ∗ |) −
2| ∗ |
= ∗ − 2 ∗
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
8/21
Mecánica del Medio Continuo | Taller Aplicativo 7
3.2. EJERCICIO DE ALGEBRA TENSORIAL-SÍMBOLO DEPERMUTACIÓN
Calcule el determinante de una matriz 3x3 expandiendo la ecuación A y aplicandola definición del símbolo de permutación.
d e t = Ԑ Comprobación inicial
d e t =
d e t = + + − − − Símbolo de permutación:
Ԑ = {+1−10 } Si los valores de i, j, k
aparecen en lasecuencia
{1231231232132132 }
SOLUCIÓN: = 1 , = 2 , = 3 Ԑ + Ԑ + Ԑ 1 2 3 1 = 1, = 2, = 3 Ԑ + Ԑ + Ԑ
Aplicando el símbolo de permutación se obtiene:
− (4) 2 = 1, = 2, = 3
Ԑ + Ԑ + Ԑ
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
9/21
Mecánica del Medio Continuo | Taller Aplicativo 8
Aplicando el símbolo de permutación se obtiene:− + (5) 3 = 1, = 2, = 3
Ԑ + Ԑ + Ԑ Aplicando el símbolo de permutación se obtiene: − (6)
Sumando 4 + 5 + 6 d e t = Ԑ
d e t = − − + −
Ordenando términos se obtiene la solución del determinante de A:
d e t = + + − − −
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
10/21
Mecánica del Medio Continuo | Taller Aplicativo 9
3.3. EJERCICIO DE ALGEBRA TENSORIAL-SÍMBOLO DEPERMUTACIÓN
Mostrar que la ecuación la siguiente ecuación Representa el producto cruz entredos vectores ⃗ y
⃗× = Ԑ Representa el producto cruz entre dos vectores ⃗ y Comprobación inicial ⃗= ⃗= Sabiendo que , , forman una base del 3D (mano derecha), entonces: × = × = × = Podemos escribir: × = Ԑ Entonces:
⃗× = = {
−
− + − } = {
−
− + − } SOLUCIÓN: = 1 , = 2 , = 3 Ԑ + Ԑ + Ԑ
1 2 3 1 = 1, = 2, = 3
Ԑ + Ԑ + Ԑ Aplicando el símbolo de permutación se obtiene: − (4)
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
11/21
Mecánica del Medio Continuo | Taller Aplicativo 10
2 = 1, = 2, = 3
Ԑ + Ԑ + Ԑ
Aplicando el símbolo de permutación se obtiene:
− + (5) 3 = 1, = 2, = 3
Ԑ + Ԑ + Ԑ
Aplicando el símbolo de permutación se obtiene:
− (6)De las ecuaciones 4 + 5 + 6 se ordena y se obtiene:
⃗× = − , − , −
⃗× = { −
− + − }
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
12/21
Mecánica del Medio Continuo | Taller Aplicativo 11
3.4. EJERCICIO TRANSFORMACIÓN DE COORDENADAS
Debido a que la ecuación de Cauchy solamente aplica para encontrar los esfuerzosen las direcciones X, Y, Z del sistema de coordenadas original, es necesario emplear
un método que tenga como fin, realizar una trasformación de las componentes deesfuerzo en las direcciones de un nuevo sistema arbitrario X’, Y’, Z’, este método sedesarrolla utilizando el álgebra vectorial y los formalismos del algebra de tensores
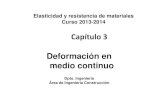
En la figura 2 se puede observar además del sistema coordenado inicial comotambién el sistema arbitrario, un plano con un vector normal en la misma direccióndel eje X’ y los ángulos de cada una de las proyecciones determinados por loscosenos directores del sistema.
Figura 2: Plano ABC con su vector normal alineado con el eje X’ y los cosenos directoresasociados al eje X’.
Se realiza la descomposición de las fuerzas Px, Py, Pz en el eje X’:
= , + , + , (1)Se usará también la ecuación (2) que se extrae de la fórmula de Cauchy:
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
13/21
Mecánica del Medio Continuo | Taller Aplicativo 12
= + + = + + = + + (2)
Teniendo en cuenta que los esfuerzos cortantes son simétricos, entre carasperpendiculares.
≅ ≅ ≅ (3)Reemplazando la ecuación (2) en (1):
= [ , + , + , ] , + [ , + , + , ] , + [ , + , + , ] , (1.1)
Agrupando los términos se obtiene:
= , + , + , + 2 , ,
+ 2
,
, + 2 , , (4)En la figura 3 se puede identificar además del eje coordenado inicial y el ejearbitrario, un plano con un vector normal asociado en la misma dirección del eje X’como también los ángulos de cada una de las proyecciones determinados por loscosenos directores del sistema asociados al eje Y’ .
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
14/21
Mecánica del Medio Continuo | Taller Aplicativo 13
Figura 3: Plano ABC con su vector normal alineado con el eje X’ y los cosenos directoresasociados al eje Y’ .
Desarrollando de forma similar se puede definir en la dirección Y’:
= , + , + , (5)Reemplazando la ecuación (2) en (5):
= [ , + , + , ], + [ , + , + , ], + [ , + , + , ], (5.1)
Agrupando los términos se obtiene:
= , , + , , + , , + , , + , , + , , + , , + , , + , , (5.2)
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
15/21
Mecánica del Medio Continuo | Taller Aplicativo 14
Factorizando y Agrupando términos similares:
= , , + , , + , ,
+
,
,
+
,
, + , , + , , + , , + , ,
(6)
Observando la figura 4 se identifica además del eje coordenado inicial y el ejearbitrario un plano con un vector normal asociado en la misma dirección del eje X’y los ángulos de cada una de las proyecciones determinados como los cosenosdirectores del sistema asociados al eje Z’ .
Figura 4: Plano ABC con su vector normal alineado con el e je X’ y los cosenos directoresasociados al eje Z’.
Desarrollando de forma similar se puede definir en la dirección Z’:
= , + , + , (7)
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
16/21
Mecánica del Medio Continuo | Taller Aplicativo 15
Reemplazando la ecuación (2) en (7):
= [ , + , + , ], + [ , + , + , ],
+ [
, +
, +
, ]
,
(7.1)
Agrupando los términos se obtiene:
= , , + , , + , , + , , + , , + , , + , , + , , + , , (7.2)
Factorizando y Agrupando términos similares:
= , , + , , + , , + , , + , , + , , + , , + , , + , , (8)
En la figura 5 se puede identificar además del eje coordenado inicial y el ejearbitrario un plano con un vector normal asociado en la misma dirección del eje Y’
y los ángulos de cada una de las proyecciones determinados como los cosenosdirectores del sistema asociados al eje Y’ .
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
17/21
Mecánica del Medio Continuo | Taller Aplicativo 16
Figura 5: Plano ABC con su vector normal alineado con el eje Y’ y los cosenos directoresasociados al eje Y’.
Desarrollando de forma similar se puede definir en la dirección Y’:
= , + , + , (9)Reemplazando la ecuación (2) en (9):
= [, + , + , ], + [, + , + , ], + [, + , + , ], (9.1)
Factorizando y Agrupando términos similares:
= , + , + , + 2 , , + 2 , , + 2 , , (10)
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
18/21
Mecánica del Medio Continuo | Taller Aplicativo 17
En la figura 6 se puede identificar además del eje coordenado inicial y el ejearbitrario un plano con un vector normal asociado en la misma dirección del eje Y’
y los ángulos de cada una de las proyecciones determinados como los cosenosdirectores del sistema.
Figura 6: Plano ABC con su vector normal alineado con el eje Y’ y los cosenos directoresasociados al eje Z’ .
Operando de forma similar se puede definir en la dirección Z’: = , + , + , (11)Reemplazando la ecuación (2) en (11): = [, + , + , ],
+ [
, +
, +
, ]
, + [, + , + , ], (11.1)
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
19/21
Mecánica del Medio Continuo | Taller Aplicativo 18
Agrupando los términos se obtiene:
= , , + , ,
+
,
, +
,
, + , , + , , + , , + , , + , , (12)
Agrupando nuevamente:
= , , + , , + , ,
+
,
, +
,
, + , , +, , + , , +, , (13)
En la figura 7 se puede identificar además del eje coordenado inicial y el ejearbitrario un plano con un vector normal asociado en la misma dirección del eje Z’
y los ángulos de cada una de las proyecciones determinados como los cosenosdirectores del sistema.
Figura 7: Plano ABC con su vector normal alineado con el eje Z’ y los cosenos directores
asociados al eje Z’.
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
20/21
Mecánica del Medio Continuo | Taller Aplicativo 19
Operando de forma similar se puede definir en la dirección Z’: = , + , + , (14)
Reemplazando la ecuación (2) en (14): = [, + , + , ], + [, + ′, + , ], + [, + , + , ], (14.1)
Agrupando los términos se obtiene:
= , + , + , + 2
,
, + 2 , , + 2 , ,
(15)
-
8/17/2019 01_TALLER MECÁNICA DEL MEDIO CONTINUO - (15-04-16).pdf
21/21
Mecánica del Medio Continuo | Taller Aplicativo 20
4. CONCLUSIONES Mediante la ecuación de Cauchy es posible modelar distintas situaciones de
los estados de esfuerzo, independientemente si el material es un fluido o unsólido.
A través de los conceptos fundamentales de tensor de esfuerzos se puedecomprender la base teórica de los elementos finitos, método queactualmente es utilizado en los software de ingeniería estructural.
El símbolo de permutación y el álgebra tensorial de Einstein, permitensimplificar el desarrollo de operaciones matriciales y vectoriales, entre otras.
Además que estos métodos pueden aportar en la simplificación del lenguajede programación.
La trasformación de coordenadas se basa en un proceso matemáticoimportante para efectuar un cambio del sistema de coordenadasconvencional a un nuevo sistema arbitrario, es de resaltar que el estado deesfuerzos depende del sistema de referencia elegido, luego con la existenciade infinitos sistemas de referencia se genera un infinito grupo de tensores.
5. BIBLIOGRAFÍA
Fung, Y.C., A First course in continuum Mechanics (Third Edition), PrenticeHall, 1994. Mase, G.T. and Mase, G.N., Continuum Mechanics for Engineers, (Second
Edition), CRC Press, 1999 Disponible en formato electrónico en la página dela Biblioteca UIS.
CASTELBLANCO, H., VARGAS, D., extractos de las clases de mecánica delmedio continuo, diapositivas.