



![A0809 Redes de alimentacion [Modo de compatibilidad] · 2008-12-18 · Redes de alimentación ... Alimentación de arrays 2 página a0 b0. Página 2 Excitaciones tipo Paralelo o Corporativa](https://static.fdocuments.ec/doc/165x107/5f53c033c84a9b5f2c7664ed/a0809-redes-de-alimentacion-modo-de-compatibilidad-2008-12-18-redes-de-alimentacin.jpg)



Idiomas
Páginas
Jurídico


REPUBLICA BOLIVARIANA DE VENEZUELA
UNIVERSIDAD DEL ZULIA
FACULTAD DE INGENIERIA
DIVISION DE ESTUDIOS PARA GRADUADOS
SIMULACION COMPUTACIONAL DE LA DINAMICA DE SARTAS DE PERFORACION MEDIANTE
EL METODO DE ELEMENTOS FINITOS
Trabajo de Grado presentado por Ing. David O. Bukowitz K.
Para Optar al Título de Magíster Scientiarum
en Gerencia de Mantenimiento
Asesor: Prof. Alonso Ocando
Maracaibo, Septiembre 2003

ii
Este Jurado aprueba el Trabajo de Grado “Simulación Computacional de la Dinámica de
Sartas de Perforación mediante el Método de Elementos Finitos” que David O. Bukowitz K.
presenta al Consejo Técnico de la División de Estudios para Graduados de la Facultad de
Ingeniería, en cumplimiento del articulo 51, aparte 51.6, pagina 12, del Reglamento de
Estudios para Graduados de la Facultad de Ingeniería de la Universidad del Zulia, como
requisito para optar al Título de Magíster Scientarium en Gerencia de Mantenimiento.
Maracaibo, Septiembre 2003
Jurado:
____________________________ Prof. Alonso Ocando
____________________________ Prof. Oscar Naveda
____________________________ Prof. Vidal Montiel
____________________________ ____________________________ Prof. Carlos Rincón David O. Bukowitz K. Director de la División de Autor Estudios para Graduados

iii
RESUMEN
Bukowitz K., David O. "Simulación Computacional de la Dinámica de Sartas de Perforación
mediante el Método de Elementos Finitos". Universidad del Zulia. Facultad de Ingeniería.
División de Postgrado. Maracaibo, Septiembre 2003.
(TRABAJO DE GRADO)
Se desarrolló un programa computacional mediante el método de elementos finitos, que permite predecir el comportamiento dinámico de las sartas de perforación, con la finalidad de evitar su deterioro o destrucción. Este análisis se lleva a cabo en tres etapas. En la primera se resuelve el problema bidimensional y no lineal de la deformación estática de la sarta; esto proporciona su perfil deformado y las fuerzas en los puntos donde contacta las paredes del hoyo. De esta forma se determina la longitud efectiva del ensamblaje de fondo que puede vibrar lateralmente. La segunda, consiste en un análisis dinámico del sistema para obtener los modos de vibración transversal, axial y torsional; en la última se realiza el análisis de respuesta del sistema a las diferentes excitaciones en las cuales se discriminan las frecuencias y se determinan las que son dañinas. Para verificar el modelo, se comparan los resultados obtenidos de varias configuraciones de sartas de perforación con datos experimentales y otros modelos desarrollados.
Palabras Claves: Sartas de Perforación, BHA, Simulación Dinámica

iv
CONTENIDO
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Capítulo 1 - Bases Teóricas . . . . . . . . . . . . . . . . . . . 2
Antecedentes 2
Vibraciones en la sarta de perforación 4
Parámetros del sistema 5
Capítulo 2 - Modelo Dinámico de la Sarta de Perforación . . . . . . . . 11
Descripción general del modelo 11
Análisis dinámico transversal 12
Análisis dinámico axial 21
Análisis dinámico torsional 22
Respuesta de frecuencia 24
Frecuencias críticas de rotación 28
Capítulo 3 - Descripción del Modelo Computacional . . . . . . . . . 30
Estructura del programa 30
Determinación de las características vibratorias transversales 34
Determinación de las características vibratorias axiales 39
Determinación de las características vibratorias torsionales 40
Post-procesamiento 42
Capítulo 4 - Pruebas y Análisis de Resultados . . . . . . . . . . . . 48
Casos de estudio 49
Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . 69 Referencias Bibliográficas . . . . . . . . . . . . . . . . . . . . . . 70

1
INTRODUCCION
La tendencia global en la perforación de pozos petroleros, es incrementar la severidad en las
condiciones de operación a las que se someten los diversos componentes de las sartas de
perforación. En la actualidad, se perforan pozos a mayor profundidad, mayores tasas de
flujo, trayectorias mas ajustadas, lodos altamente corrosivos, mayores temperaturas y por
ende un aumento de los impactos y vibraciones. Todas estas condiciones conllevan a que
se produzcan fallas y daños en los componentes de la sarta, por lo que se requiere disponer
de una metodología adecuada de predicción y prevención de fallas.
Las vibraciones mecánicas presentes en las sartas de perforación tiene gran influencia en el
rendimiento de la perforación de pozos petroleros. Dentro de una metodología integrada de
control de vibraciones, el modelaje y simulación de las sartas de perforación constituye una
actividad fundamental en la fase de análisis y planificación de los programas de perforación
de pozos petroleros. Por lo que se ha detectado la importancia de la misma, para lograr el
incremento del rendimiento en el proceso de perforación.
A nivel mundial se han desarrollado diversos programas computacionales para el modelaje
de las sartas de perforación, que permiten seleccionar y optimizar componentes de las
mismas, ya sea para el diseño y planificación de los pozos, para la predicción de los efectos
por los cambios de componentes o condiciones de operación durante la perforación, o para
el análisis de fallas ocurridas previamente.
En este estudio se presentan los fundamentos teóricos y la metodología de modelaje
mediante el método de elementos finitos, para obtener como producto un programa
computacional que permite simular las condiciones dinámicas de la sarta de perforación
cuando se encuentra en operación. De esta manera se podrán conocer los modos de
vibración y las frecuencias de excitación a las cuales está sometida la sarta, para así evitar el
efecto de resonancia y hacer mas efectivo el proceso.

2
C A P I T U L O 1
Bases Teóricas
Antecedentes La experiencia en operaciones de perforación alrededor del mundo, muestra que los
problemas más comunes están relacionados con la ruptura o falla de la tubería de
perforación o el ensamblaje de fondo (BHA). Esto se traduce en gastos que se encuentran
en el orden de varios millones de dólares al año. Sin embargo, de igual forma que otros
problemas de perforación como fallas en los revestidores o incidentes relacionados al control
de pozos, la falla del BHA produce consecuencias financieras sustanciales debido al severo
impacto en las operaciones y su frecuencia de ocurrencia. Adicionalmente al efecto de falla
de la sarta, las vibraciones en el BHA pueden afectar la tasa de penetración (ROP) y la
confiabilidad de los instrumentos de medición (MWD). Con estas premisas puede
corroborarse la importancia de un completo análisis y entendimiento de estos complejos
sistemas mecánicos.
La dinámica de sartas de perforación ha sido modelada de numerosas formas, dependiendo
de los factores de diseño a ser considerados. Los modelos de torque y arrastre, que se
encuentran en desarrollo desde 1983, utilizan aproximaciones de las fuerzas estáticas para
determinar las cargas de fricción globales del sistema durante la rotación y el deslizamiento.
Sin embargo, estos modelos proveen conocimientos limitados sobre los fenómenos
dinámicos que ocurren durante la perforación. Los primeros modelos direccionales estáticos
datan de los inicios de la perforación y se concentran en la determinación de las fuerzas en
el ensamblaje de fondo en condiciones estáticas. Afortunadamente, intentos más recientes
de calcular las fuerzas en el BHA analíticamente incorporan importantes técnicas numéricas,
como el método de elementos finitos, que permite el análisis dinámico bajo una gran
variedad de condiciones.

3
Los modelos dinámicos direccionales, inicialmente desarrollados a finales de los 70s,
intentan modelar el movimiento del BHA utilizando una simulación transitoria para establecer
valores de las fuerzas promedio sobre el ensamblaje y la mecha. Como un compromiso
entre los modelos transitorios (que resultaban costosos computacionalmente), y los
simplificados modelos estáticos, se implementaron los modelos cuasi-dinámicos. En estos
últimos, la fricción rotacional se incluye en la formulación estática para mejorar la calidad de
la distribución de fuerzas calculada y permitir la predicción del fenómeno de “caminar” en el
plano azimutal de la perforación. Desde 1960 hasta ahora, se han llevado a cabo
mediciones experimentales de las condiciones dinámicas de la sarta. Entre los parámetros
estudiados se encuentran el amortiguamiento de la sarta, las fuerzas dinámicas en la mecha
y las vibraciones de la tubería de perforación en superficie. También se ha estudiado el
impacto en el BHA debido al desempeño de los absorvedores de choque “shock subs”, el
fenómeno de caminar rotacional “whirl” y las condiciones de borde.
Para examinar los mecanismos de excitación en el BHA, debe entenderse primero la
mecánica de la mecha o broca utilizada. Estudios realizados en excitaciones cuasi-
aleatorias en la mecha, muestran que la dinámica de la sarta de perforación puede ser
modelada de forma más realista si se añade una componente aleatoria a la velocidad de
rotación de la mecha. En un estudio posterior, se instrumentó una mecha tricónica, para
efectuar mediciones de fuerzas dinámicas y torque. Las aplicaciones de esta tecnología
incluyen la detección de desgaste y bloqueo de los conos, así como la posibilidad de
determinar las propiedades de la formación que está siendo perforada. Estas pruebas
muestran que la mecha produce excitaciones con varios picos espectrales, y estos
“patrones” pueden ser asociados con tipos particulares de mechas. En 1989 se descubrió
que especialmente las mechas PDC son propensas a exhibir comportamientos semejantes al
caminar rotacional.
Para entender el impacto de la condición dinámica de la sarta en la tasa de penetración
(ROP), es necesario hacer una revisión de las tecnologías utilizadas para maximizar este
parámetro. Estudios recientes se han enfocado en correlaciones empíricas que relacionen la
tasa de penetración (ROP), el peso sobre la mecha (WOB) y la velocidad de rotación de la
sarta (RPM), y se muestra que existe un nivel de energía mínimo requerido para atravesar la
formación rocosa. Las pérdidas causadas por un comportamiento dinámico anormal de la
sarta y el BHA van en detrimento de ésta cantidad de energía, por lo cual se reduce la tasa
de penetración.

4
Por otra parte, la fricción torsional que induce el fenómeno de entrabe-deslice “stick-slip” fue
estudiada por primera vez en 1981 por científicos rusos. En 1987, un estudio basado en
datos teóricos y de campo, logró identificar los parámetros asociados al entrabe y
aceleración brusca.
Los análisis modales del BHA son ahora mucho más útiles, pues identifican las frecuencias
naturales a las cuales pueden inducirse vibraciones dañinas. Inicialmente, se utilizaban
métodos continuos unidimensionales para predecir las frecuencias torsionales y axiales, así
como la respuesta dinámica de la sarta. Las vibraciones laterales (llamadas también
transversales) comenzaron a estudiarse a partir de 1968, tomando numerosas
simplificaciones para llevar a cabo el análisis, y en 1980 los investigadores comenzaron a
realizar pruebas de laboratorio, proponer nuevos modelos teóricos y aplicar técnicas de
elementos finitos al problema de vibraciones en sartas.
1.1 Vibraciones en la sarta de perforación Los desplazamientos y esfuerzos asociados con las vibraciones, no son significativamente
grandes hasta que el sistema es excitado con una señal a una de sus frecuencias naturales,
lo que causa la resonancia.
La mayor fuente de excitación es la velocidad de giro. Si el BHA posee una frecuencia
natural transversal, axial o torsional cercana a la velocidad de rotación y ese modo no se
encuentra bien amortiguado, entonces existe un peligro de resonancia en el BHA que puede
originar una falla debido a fatiga.
La interacción roca-mecha es otra de las fuentes de excitación, la cual puede estar bien
amortiguada si la formación es blanda; pero si la formación es dura se generan frecuencias
debido al impacto de los dientes o insertos de la mecha. En el caso de una mecha tricónica
se pueden esperar por ejemplo, frecuencias de 3xRPM.
Otras fuentes potenciales de excitación la constituyen las bombas de lodo y los
estabilizadores. Un estabilizador con 4 aletas rectas por ejemplo, puede generar una señal
con frecuencias de 4xRPM.

5
1.1.1 Vibraciones transversales de la sarta
Las frecuencias resonantes transversales dependen principalmente de las dimensiones y
rigideces de los elementos de la sarta, de la ubicación y holgura de los estabilizadores, del
peso aplicado sobre la mecha y de la inclinación del hoyo. Este último parámetro es de
suma importancia, ya que es uno de los factores que determina el punto en el cual la tubería
por encima del último estabilizador hace contacto con las paredes del hoyo, estableciendo
efectivamente la longitud del sistema vibratorio transversal. Por este motivo, la vibración
transversal no se puede apreciar en la superficie, a menos que se acople con los modos
axiales y torsionales.
1.1.2 Vibraciones axiales de la sarta
Estas vibraciones originan que la mecha se levante del fondo del hoyo “drill string bounce”, lo
cual puede deteriorar la mecha, dañar el BHA y, en ultima instancia, disminuir la tasa de
penetración (ROP).
1.1.3 Vibraciones torsionales de la sarta
La vibración torsional propaga rotaciones irregulares que tienden a fatigar las conexiones,
deteriorar la mecha y también retardar el proceso. Un fenómeno asociado a la vibración
torsional, es el entrabamiento y posterior aceleración brusca “stick-slip”.
1.2 Parámetros del sistema El modelado predictivo de la respuesta dinámica de la sarta de perforación bajo excitación
armónica monocromática requiere resolver la ecuación general de movimiento, que tiene la
forma,
(Ec. 1.1)
[ ]( ) [ ]( ) [ ]( ) [ ] ( )tFxKxCxM ωcos=++ &&&

6
En esta ecuación, [M], [C] y [K] son las matrices de masa, amortiguamiento y rigidez que
representan la sarta. [F] es el vector de excitación del sistema y x&& , x& y x son los vectores
de aceleración, velocidad y desplazamiento respectivamente. El término coseno tiene que
ver con el tiempo “t” y la frecuencia de la excitación “ω”, en condiciones de estado
estacionario.
Antes de considerar los procedimientos requeridos para resolver la ecuación (Ec. 1.1), es
necesario revisar los aspectos fundamentales que tienen que ver con la descripción de la
masa, amortiguamiento y rigidez del ensamblaje de fondo, y por supuesto, con el vector de
excitación y las condiciones de contorno del problema.
1.2.1 Rigidez Los primeros investigadores establecieron que la teoría convencional de vigas (teoría de
vigas de Euler-Bernoulli) es lo suficientemente precisa como para simular la sarta en tasas
de curvatura menores a 10-15°/100 pie. Varias formas de esta formulación de rigidez han
sido implementadas en modelos previos, incluyendo algunas de éstas, extensas validaciones
experimentales.
La formulación de elementos finitos puede ser utilizada para incluir la influencia de las
fuerzas axiales en las vibraciones laterales. Las cargas de tensión incrementan las
frecuencias naturales, como consecuencia de un aumento de la rigidez lateral de la sarta,
mientas que una carga de compresión, como las presentes en el BHA reduce la rigidez de la
misma. Si la carga de compresión está por encima de cierto valor crítico, pueden predecirse
frecuencias naturales negativas o iguales a cero, como consecuencia de que el ensamblaje
de fondo se ha pandeado. Esta relación puede ser utilizada como un criterio para
asegurarse de que no ha ocurrido pandeo en el BHA bajo condiciones de cargas estáticas.
Las propiedades mecánicas de los materiales de la sarta deben ser consideradas en el
análisis. Los valores del módulo de Young, la relación de Poisson y la densidad del acero
han sido establecidos como 30 Mpsi, 0.3 y 0.283 lbm/pul3. Las aleaciones de la familia del
monel pueden ser utilizadas en la sarta para fines anti-magnéticos, en forma de collares y
absorbedores. Si se utiliza este material, deben fijarse los valores de las propiedades como
18.9 Mpsi para el módulo de Young (67% del valor para el acero) y 0.302 lbm/pul3 para la
densidad (107% del valor para el acero). La diferencia entre las propiedades mecánicas de

7
las aleaciones no-magnéticas cromo-magnesio y el acero es sólo un pequeño porcentaje de
los valores nominales para este último.
Los componentes especiales del BHA como MWD, amortiguadores, motores, turbinas y
martillos “jars”, poseen propiedades de rigidez únicas, como resultado de la configuración
geométrica especial que presentan. En muchos casos, es evidente que no se ha conducido
una investigación que tenga como objetivo describir éstos componentes en términos de la
rigidez axial, torsional o lateral. Respecto a los amortiguadores por ejemplo, se han obtenido
valores inesperados de rigidez no lineal. [Ref. 3]
1.2.2 Amortiguamiento Hasta la fecha, se han propuesto varios modelos de condiciones dinámicas del BHA sin
considerar la amortiguación. Claramente, estos modelos son incapaces de predecir las
respuestas del BHA a sus frecuencias naturales, debido a su naturaleza. Una discusión más
reciente de amortiguamiento generalizado en el BHA, incluye los fenómenos de
amortiguamiento de Rayleigh, amortiguamiento estructural y amortiguamiento viscoso.
Aunque la teoría para estos modelos ha sido bien establecida, la información cuantitativa
requerida para evaluar algunos de éstos efectos no estaba disponible, por lo cual, en un
estudio más reciente se realizaron experimentos relacionados con la amortiguación de la
sarta de perforación. Se utilizaron 32 juntas de tubería de perforación de 3 ½” y varios
fluidos distintos. En estas pruebas, se usó un martillo de impacto en superficie para generar
ondas axiales o torsionales en la sarta. Al final del BHA en el hoyo, se instaló un
acelerómetro para monitorear las reflexiones de ondas de esfuerzo. Tomando éstas
reflexiones a varias frecuencias diferentes, de desarrollaron factores de “calidad” o de
amplificación de resonancias. Estos datos fueron transformados a relaciones de
amortiguamiento (ζ), y luego estudiados estadísticamente. Este procedimiento permitió
llegar a la función de amortiguamiento,
(Ec. 1.2)
en donde f es la frecuencia de amortiguación en Hz, y los coeficientes “a” y “b” son funciones
de la densidad del lodo (ρlodo) en libras por galón. Esta dependencia está dada por las
relaciones: [Ref. 3]
(Ec. 1.3)
baf=ζ
( )
( ) ( ) lodo
lodo
b
xa
ρ
ρ
123.015.0
1023.5 75.89
−=
= −

8
Estas funciones expresan la relación de amortiguamiento como una función de la densidad
del lodo y la frecuencia. Si se tienen valores altos de la densidad del lodo, se consigue un
incremento en el amortiguamiento, mientras menores pesos del lodo producen un menor
valor de amortiguamiento. Por medio de combinaciones de bajas frecuencias y altos pesos
de lodo, ésta función introduce sobreamortiguamiento. No obstante, es importante recordar
que esta es una comparación cualitativa con mediciones realizadas en una sarta en
particular, y deben investigarse intensivamente otros métodos para tomar en consideración
el movimiento del flujo, la rotación de la sarta y otra gran variedad de posibles fuentes de
excitación. [Ref. 3] Por otro lado, incluir estas funciones en un problema específico puede
resultar en la omisión de algunas frecuencias críticas (principalmente en los rangos de bajas
frecuencias), por lo cual en el presente estudio se incluye un factor de amortiguamiento de
1%, ya que es el que mejor se ajusta a los modelos estudiados.
1.2.3 Masa Debe utilizarse una matriz de masa consistente para representar la masa de la sarta. Como
indican otros investigadores, deben realizarse algunas modificaciones a la forma como se
describe la masa del ensamblaje de fondo para considerar los efectos del fluido de
perforación desplazado por el movimiento lateral de la sarta. Existen relaciones para
calcular un coeficiente de “masa añadida” de la sarta, provenientes de experimentos
realizados a escala de laboratorio. Sin embargo, debido a las diferencias entre las
condiciones en el fondo del hoyo y estos experimentos, estas relaciones deben ser utilizadas
con mucha cautela. Los experimentos se basan en la vibración en “cantilever” de una varilla
de aluminio de 14” de largo y ½” de diámetro exterior, contenida dentro de una carcasa
cilíndrica de 2 ½” de diámetro interno. Se utilizaron varios tipos diferentes de fluidos en el
espacio entre la varilla y la carcasa. El fluido no se circuló durante el experimento, ni
tampoco se mantuvo en rotación la varilla de aluminio. Como consecuencia de esto, pueden
existir diferencias importantes entre las condiciones de operación reales y las de los
experimentos. A pesar de esta dificultad, no existe una mejor fuente de coeficientes de
masa añadida. La ecuación (Ec. 1.4) muestra el término adicional en la descripción de la
masa del ensamblaje: [Ref. 3]
(Ec. 1.4)
[ ] [ ] [ ] ( )[ ]moMmlT MCMMM ω++=

9
Donde [M]T es la matriz de la masa total del sistema dinámico, [M] es la matriz de masa
nominal para la sarta, [Mml] es la masa de lodo dentro de los tubos de perforación “drill
collars”, CM(ω) es el coeficiente de masa añadida, proveniente de la investigación antes
mencionada, y [Mmo] es la masa de lodo entre los tubos de perforación y el hoyo. Note que
CM(ω) es una función de la frecuencia de vibración, las propiedades del lodo y las
dimensiones del ensamblaje de fondo y el pozo. Desde un punto de vista práctico, la masa
de lodo dentro de los tubos de perforación incrementa la masa del sistema sólo en un
pequeño porcentaje. Investigaciones anteriores han mostrado que la masa de fluido fuera de
los collares de perforación reduce las frecuencias naturales en 10 % o más, sin incluir el
coeficiente CM(ω) descrito aquí. Si se considera CM(ω), el impacto de la masa añadida
puede ser de 20 a 30 % de la masa del sistema. Como consecuencia de la magnitud de éste
efecto, es crítico realizar una validación del coeficiente de masa añadida en estudios futuros.
[Ref. 3]
1.2.4 Excitaciones Existe una gran variedad de fuentes de excitación en un ensamblaje de fondo en plena
operación. Estas incluyen las fuerzan en la mecha, desbalances de masa en los tubos de
perforación, cargas en los estabilizadores y la cinemática de la tubería de perforación. Los
primeros estudios experimentales identificaron las excitaciones “3X”, asociadas a las mechas
tricónicas, donde la “X” representa la velocidad de rotación. Adicionalmente a los múltiplos
de 1X, 2X y 3X de la velocidad de rotación, los múltiplos de la velocidad de la bomba entran
al sistema a través de pulsaciones en el lodo. La excitación 1X, asociada a un desbalance
de masa, puede actuar de forma dominante en tubos de perforación que presenten
tolerancias de maquinado o desgaste significativas. La magnitud de la excitación producida
por el desbalance de masa debe variar con el cuadrado de la velocidad de rotación, para
tomar en consideración el efecto de rotor excéntrico.
Como se planteó anteriormente, experimentos recientes utilizando mechas tricónicas
instrumentadas han identificado formas espectrales para mechas específicas.
Desafortunadamente, estas pruebas han sido llevadas a cabo en unos pocos modelos de
mechas, y los resultados detallados son propiedad de los fabricantes. Cuantificar la
naturaleza espectral de las mechas con cortadores fijos es aún mas complicado. La
observación del fenómeno de whirl en mechas PDC, provee información espectral que
muestra excitaciones generadas a frecuencias altas (12X). Aparte de la limitada información

10
que se consigue en la literatura, la descripción espectral de las excitaciones producidas por
una mecha PDC permanece como un importante tema de investigación en el futuro. Cuando
se utilizan dispositivos de desplazamiento positivo, como motores de fondo y turbinas, deben
considerarse fuentes adicionales de excitación provenientes de estos equipos. También
deben ser tomados en cuenta los múltiplos de las velocidades de rotación de la sarta, el
motor o turbina y la velocidad combinada de ambas. Algunos movimientos particulares de la
sarta como el caminar o la precesión, pueden darse de forma sostenida y afectar el
crossover tubería/BHA. Otros fenómenos transitorios como el contacto entre la sarta y el
revestidor son irregulares en el tiempo, y por lo tanto no pueden definirse en términos de
frecuencia o magnitud. [Ref. 3].
1.2.5 Condiciones de borde Las condiciones de borde que tienen que ver con las vibraciones de la sarta de perforación
se incluyen en equipos como los estabilizadores, la mecha y la interfase de la tubería. Los
estabilizadores, dependiendo de su holgura, son tratados como condiciones de borde tipo
pasador, con desplazamientos laterales restringidos, pero sin restringir la rotación lateral
(flexión); así mismo se consideran las condiciones de borde debidas al contacto sarta-hoyo.

11
C A P I T U L O 2
Modelo Dinámico de la Sarta de Perforación
2.1 Descripción general del modelo Para obtener la información requerida sobre el comportamiento del sistema, se utiliza el
Método de Elementos Finitos (MEF), de amplia aceptación para la solución numérica de
problemas de ingeniería, particularmente en el área de elasticidad tanto estática como
dinámica.
NODOS
CARGA AXIALEN EL TOPE
CONDICION DE BORDEDE CONTACTO
RESTRICCIONLATERAL
MECHA
CONDICIONES DE BORDEDE FONDO DE POZO
ESTABILIZADORES
ELEMENTOS
g
Figura 2.1 – Modelo esquemático de una sarta de perforación

12
En términos generales, en este método de análisis, una región compleja que define un
continuo se discretiza en formas geométricas simples denominadas elementos finitos. Las
propiedades del material y las relaciones gobernantes son consideradas sobre esos
elementos y expresadas en términos de valores desconocidos en los bordes del elemento.
Un proceso de ensamble, en el cual se consideran debidamente las cargas y restricciones,
da lugar a un conjunto de ecuaciones algebraicas expresadas en forma matricial. La solución
de esas ecuaciones matriciales proporciona el comportamiento aproximado del continuo.
El comportamiento de la sarta de perforación (Figura 2.1) se analiza en un plano longitudinal
que contiene al sistema, y se divide en tres problemas desacoplados entre si: vibraciones
transversales, vibraciones axiales y vibraciones torsionales. El objetivo del análisis numérico
del sistema es determinar los modos y frecuencias de vibración en los tres movimientos
descritos, para posteriormente usar dichos resultados para obtener la respuesta de
frecuencias del sistema en cualquier punto del mismo a todas las posibles excitaciones.
2.1.1 Análisis dinámico transversal De los tres tipos de análisis, el caso más complejo es el de vibraciones transversales. Esto
es debido a que las condiciones de contorno no están predeterminadas antes de obtener la
solución, dado que los puntos de contacto de la sarta con el hoyo debido a las fuerzas
estáticas aplicadas determinarán las condiciones de contorno, pero estos puntos a su vez no
se conocen hasta que se haga un análisis estático del sistema. Por lo tanto, antes de
efectuar el análisis dinámico transversal es necesario efectuar un análisis estático para
determinar la forma deformada de la sarta, con lo que se obtienen los puntos de contacto
entre sarta y agujero que se usarán como condiciones de contorno en el análisis dinámico
transversal.
2.1.1.1 Análisis estático En el análisis estático se busca obtener la forma deformada de la sarta debido a las cargas
aplicadas, tales como el peso propio de la sarta, las fuerzas de flotación debidas a lodo de
perforación, y el peso sobre la mecha especificado, tomando en cuenta las restricciones de
desplazamiento a lo largo del sistema debidas a los miembros (mecha, estabilizadores, mesa
rotatoria) y al confinamiento de la sarta en el agujero. Dado que no se conocen a priori los
puntos de contacto entre la sarta y el agujero, que dependen de la configuración deformada

13
de la sarta, que a su vez depende de los puntos de contacto, el problema es de naturaleza
no lineal y tiene que ser resuelto iterativamente.
En el análisis estático de un sistema elástico usando el MEF, se busca reducir el problema
continuo a uno discreto, mediante la ecuación algebraica matricial de la forma:
FQK =× (Ec. 2.1)
en donde K es la matriz de rigidez del sistema, Q es el vector de grados de libertad (GDL),
formado por los desplazamientos de los nodos de los elementos, y F es el vector de cargas
nodales equivalentes del sistema. La matriz K y el vector F se obtienen de superponer, o
“ensamblar”, las matrices de rigidez de los elementos.
Como se mencionó anteriormente, la sarta de perforación se modelará como una estructura
plana con elementos conectados rígidamente. Durante el análisis estático se utilizan
elementos tipo marco, de 3 grados de libertad por nodo (Figura 2.2).
1
2
x
z, z'
y
x'y'
Yjk
Xjk
3
6
54
k
by'bx'
Py' Px'
Mz
Figura 2.2 – Elemento tipo Marco Bidimensional

14
ELEMENTO MARCO BIDIMENSIONAL
Los grados de libertad nodales son los desplazamientos axiales y transversales, y la rotación
transversal. Basándose en esta configuración, se puede obtener la matriz de rigidez elástica
y el vector de cargas nodales equivalentes del elemento como:
−−−
=
22
11
2
1
3'
4602601206120
00460
.120
LLLLLrr
LLSim
r
LEIk ze
e (Ec. 2.2)
T
yyxyyxe LpLpLpLpLpLpf
−=
12221222
2'''
2''' (Ec. 2.3)
con zI
ALr2
1 = . Las constantes involucradas en las matrices se describen a continuación:
E: Modulo de Young del material A: Área de la sección transversal L: Longitud del elemento finito Iz: Momento de Inercia de Area centroidal con respecto a un
eje transversal '' yx pp : Cargas distribuidas por unidad de longitud (por gravedad)
en las direcciones axial y transversal, respectivamente
Para resolver el problema estático hay que tomar en cuenta el debilitamiento o reforzamiento
geométrico de los elementos de la sarta debido a fuerzas de compresión o tensión a las que
estos se encuentran sometidos. Esto se manifiesta a través de una matriz de rigidez
geométrica que se presenta a continuación:

15
−−−−
−−
=
15/210/030/10/010/5/6010/5/60
00000030/10/015/210/0
10/5/6010/5/60000000
'
FLFFLFFLFFLF
FLFFLFFLFFLF
k eg (Ec. 2.4)
en donde F es la fuerza axial promedio en el elemento, negativa si es a compresión y
positiva si es a tracción, de tal manera que la matriz de rigidez del elemento es la suma de la
rigidez elástica más la rigidez geométrica del elemento:
''' eg
ee
e kkk += (Ec. 2.5)
La matriz de rigidez y el vector de cargas nodales equivalentes del sistema completo se
obtienen ensamblando las matrices locales, tomando en cuenta la orientación de cada
elemento respecto al sistema de coordenadas global:
''eTe
eTe
fRfRkRk
=
=
∑
∑=
=
e
ee
e
fF
kK (Ec. 2.6)
en donde la matriz R representa la transformación de rotación entre el sistema de
coordenadas local del elemento e y el sistema de referencia global, y el signo sumatoria
representa el proceso de ensamble de la matrices tomando en cuenta la conectividad inter-
elementos.
Antes de resolver el sistema FQK =× para los GDL nodales Q, hay que eliminar la
singularidad de la matriz K introduciendo las condiciones de contorno de desplazamiento
prescrito, e incluir las fuerzas concentradas aplicadas a la sarta (peso sobre la mecha,
tensión en el malacate).

16
El procedimiento descrito anteriormente resuelve el problema elástico lineal, sin tomar en
cuenta el problema de contacto de la sarta con el hoyo. El proceso iterativo necesario para
resolver este problema se basa en la solución del problema lineal repetidas veces, variando
las condiciones de contorno, hasta que se cumpla un criterio de convergencia determinado,
relacionado con el hecho de que la sarta no puede penetrar en la pared, y que la pared no
puede “halar” a la sarta para mantener el contacto, por lo que las reacciones en los puntos
de contacto tienen que tener signos opuestos al desplazamiento nodal en cada nodo de la
sarta en contacto con las paredes del hoyo. El proceso iterativo se describe en el diagrama
de flujo mostrado en la Figura 2.3.

17
Calculo de la matriz K y vector F
Aplicacion de las Cond. de contorno permanentes NU y U
Calculo de desplazamientos Q
Aplicacion de las Cond. de contorno por contacto con el hoyo NU1 y U1
Calculo de las reacciones con las paredes del hoyo R1
Calculo de las reacciones en la mecha y
estabilizadores R
Tienen las reaccionesR1 y los desplazamientos laterales Q(3*NN-2) en alguno de los puntos de contacto con el hoyo la
misma direccion?
Sobrepasan los desplazamientos laterales
Q(3*NN-2) a las claridades nodales en algun lugar de la
sarta?
Remueva la condicion de contorno NU1
correspondiente al nodo donde esto sucede
Introduzca una condicion de contorno con U1 igual a la claridad en el nodo
donde esto suceda
Se viola la condicion de convergencia?
Condicion de convergencia violada
Condicion de convergencia violada
Si
No
Si
No
No
Si
FIN
COMIENZO
Figura 2.3 – Diagrama de Flujo del modelo estático
18
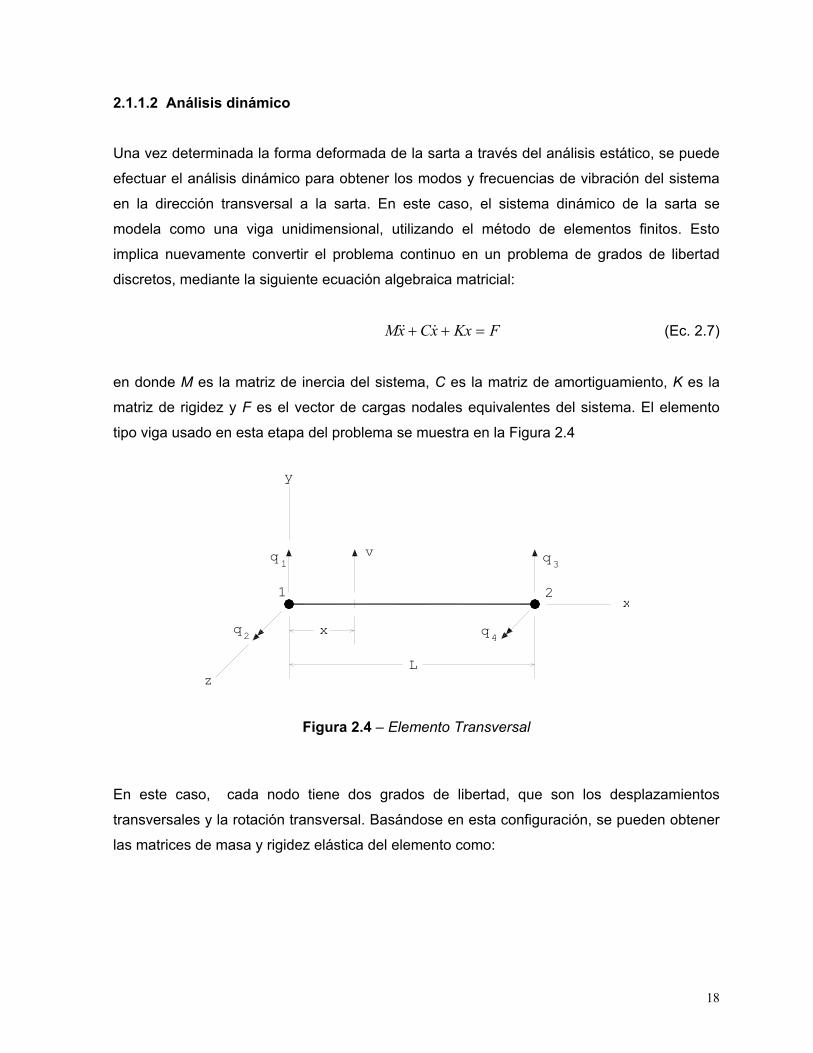
2.1.1.2 Análisis dinámico
Una vez determinada la forma deformada de la sarta a través del análisis estático, se puede
efectuar el análisis dinámico para obtener los modos y frecuencias de vibración del sistema
en la dirección transversal a la sarta. En este caso, el sistema dinámico de la sarta se
modela como una viga unidimensional, utilizando el método de elementos finitos. Esto
implica nuevamente convertir el problema continuo en un problema de grados de libertad
discretos, mediante la siguiente ecuación algebraica matricial:
FKxxCxM =++ &&& (Ec. 2.7)
en donde M es la matriz de inercia del sistema, C es la matriz de amortiguamiento, K es la
matriz de rigidez y F es el vector de cargas nodales equivalentes del sistema. El elemento
tipo viga usado en esta etapa del problema se muestra en la Figura 2.4
1 2
x
L
x
qq1 3
v
4qq2
z
y
Figura 2.4 – Elemento Transversal
En este caso, cada nodo tiene dos grados de libertad, que son los desplazamientos
transversales y la rotación transversal. Basándose en esta configuración, se pueden obtener
las matrices de masa y rigidez elástica del elemento como:

19
−−−−−−
=
22
22
422313221561354313422135422156
420
LLLLLLLLLLLL
ALme ρ (Ec. 2.8)
−−−−
−−
=
22
22
3
2333636
3233636
2
LLLLLL
LLLLLL
LEIk ee (Ec. 2.9)
en donde las propiedades geométricas y mecánicas involucradas en las matrices se definen
a continuación:
ρ: Densidad del material
A: Área de la sección transversal
L: Longitud del elemento
E: Modulo de Young
I: Momento de Inercia de Area centroidal con respecto a un eje transversal
Adicionalmente, en el problema de vibraciones transversales hay que tomar en cuenta el
debilitamiento o reforzamiento geométrico debido a fuerzas de compresión o tensión
aplicadas a cada uno de los elementos de la sarta. Esto se manifiesta a través de una matriz
de rigidez geométrica que se presenta a continuación:
−−−−
−−
=
15/210/30/10/10/5/610/5/630/10/15/210/
10/5/610/5/6
FLFFLFFLFFLFFLFFLFFLFFLF
k eg (Ec. 2.10)

20
en donde F es la fuerza axial promedio en el elemento, negativa si es a compresión y
positiva si es a tracción, de tal manera que la matriz de rigidez del elemento es la suma de la
rigidez elástica mas la rigidez geométrica del elemento:
eg
ee
e kkk += (Ec. 2.11)
Como se explicó en la sección anterior, las matrices de masa y rigidez del sistema completo
se obtienen ensamblando las matrices locales, tomando en cuenta la conectividad inter-
elementos:
∑=e
emM ∑=e
ekK (Ec. 2.12)
En este punto, se introducen las condiciones de contorno de desplazamiento prescrito al
sistema, modificando K y M. Para el análisis de las vibraciones transversales, estas
condiciones de contorno incluyen los desplazamientos prescritos debido a la presencia de
elementos como la mecha y los estabilizadores, que están en contacto con el hoyo e
introducen condiciones de contorno articuladas, y la mesa rotaria, que introduce una
condición de contorno empotrada, así como las condiciones de contorno articuladas debido
al contacto de secciones de la sarta con el hoyo debido a la deflexión estática, que fue
determinada durante el análisis estático descrito anteriormente.
Dado que en este trabajo el propósito es obtener la respuesta de frecuencia del sistema y no
la respuesta en el tiempo, el sistema se analizará utilizando análisis modal, mediante las
matrices de rigidez y masa obtenidas en esta sección. El problema de análisis modal y
obtención de la respuesta de frecuencia de un sistema descrito por un par de matrices {K, M}
se presenta mas adelante en éste capítulo.

21
2.1.2 Análisis dinámico axial Para determinar el comportamiento dinámico en la dirección del eje de rotación de la sarta, el
sistema se modela como una barra unidimensional, utilizando el método de elementos
finitos. Como en el caso del análisis dinámico lateral, esto implica convertir el problema
continuo en un problema de grados de libertad discretos, mediante la ecuación (2.7).
El elemento tipo barra usado en esta etapa del problema se muestra en la Figura 2.5:
1 2u
x
L
x,qq
1 2u
Figura 2.5 – Elemento Axial
Cada nodo del elemento tiene un grado de libertad, que es en este caso el desplazamiento
axial del nodo. Basándose en esta configuración, se puede obtener las matrices de masa y
rigidez del elemento barra como:
=
2112
6 ALM ρ
−
−=
1111
LEAK (Ec. 2.13)
en donde las propiedades involucradas en las matrices fueron definidas en el caso anterior.
Las matrices de masa y rigidez del sistema completo se obtienen ensamblando las matrices
locales, tomando en cuenta la conectividad inter-elementos; mediante las ecuaciones (2.12).
Las condiciones de contorno de desplazamiento prescrito se introducen al sistema,
modificando K y M. Para el problema de vibraciones axiales, las condiciones de contorno
solo incluyen los desplazamientos prescritos o elasticidades concentradas debido a la mecha
en el fondo y la mesa rotaria en el tope, según sea el caso.

22
En este punto es posible obtener la respuesta de frecuencia del sistema utilizando análisis
modal, con las matrices de rigidez y masa obtenidas en esta sección. El problema de análisis
modal y obtención de la respuesta de frecuencia de un sistema descrito por un par de
matrices {K, M} se presenta mas adelante en éste capítulo.
2.1.3 Análisis dinámico torsional Para determinar el comportamiento dinámico correspondiente a la torsión en la dirección del
eje de rotación de la sarta, el sistema se modela como una barra torsional unidimensional,
utilizando el método de elementos finitos. Este problema es análogo al problema de
vibraciones axiales, tomando en cuenta los grados de libertad y propiedades mecánicas
adecuadas. El elemento tipo barra torsional usado en esta etapa del problema se muestra en
la siguiente figura:
1 2
x
L
xqq
1 2x
Figura 2.6 – Elemento Torsional
Cada nodo del elemento tiene un grado de libertad, que es en este caso la rotación torsional
en el nodo respectivo. Basándose en esta configuración, y usando la analogía con el
problema axial, se puede obtener las matrices de masa y rigidez del elemento como:
=
2112
6 JLM ρ
−
−=
1111
LGJK (Ec. 2.14)
en donde, en adición a las propiedades geométricas y mecánicas definidas con anterioridad,
se definen también:

23
J: Momento polar de inercia del área de la sección transversal
G: Modulo de corte del material
Las matrices de masa y rigidez del sistema completo se obtienen ensamblando las matrices
locales, tomando en cuenta la conectividad inter-elementos, utilizando las ecuaciones (2.12).
Las condiciones de contorno de desplazamiento prescrito se introducen al sistema,
modificando K y M. Para el problema de vibraciones torsionales, las condiciones de contorno
se manifiestan como una elasticidad concentrada a nivel de la mecha.
En este punto es posible obtener la respuesta de frecuencia del sistema utilizando análisis
modal, con las matrices de rigidez y masa obtenidas. El problema de análisis modal y
obtención de la respuesta de frecuencia de un sistema descrito por un par de matrices {K, M}
se presenta en el siguiente punto.

24
2.1.4 Respuesta de frecuencia Para obtener la respuesta de frecuencia del sistema a una excitación determinada se parte
del modelo homogéneo no amortiguado del sistema, dado por la siguiente ecuación:
0=+ KxxM && (Ec. 2.15)
Suponiendo una solución armónica del tipo tx ii ωφ sin= y sustituyendo en la ecuación
anterior, se obtiene:
0sin)( 2 =+− tKM iii ωφω (Ec. 2.16)
lo que implica:
0)( 2 =+− ii KM φω (Ec. 2.17)
La ecuación anterior define el problema generalizado de autovalores, en donde los valores
de iω son los autovalores del sistema, que determinan las frecuencias características de
vibración, y los vectores iφ definen los modos de vibración del sistema, que reflejan la forma
deformada del sistema cuando se encuentra oscilando a la frecuencia ωi. Si las matrices de
rigidez y de masa tienen dimensión NMODOS, entonces existirán NMODOS pares { iω , iφ }
que proporcionan soluciones al problema generalizado de autovalores diferentes a la trivial.
La principal propiedad de los autovectores es su ortogonalidad con respecto a las matrices
de masa y rigidez, que significa que:
jiKM
jTi
jTi ≠
==
,00
φφφφ
(Ec. 2.18)
Dado que la escala de los autovectores φi es arbitraria, estos suelen ser ortonormalizados de
acuerdo algún criterio. En este caso se ortonormalizará con respecto a la matriz de masa, de
tal forma que
iTi
ii
Mφφ
φφ =ˆ (Ec. 2.19)

25
Los autovalores y autovectores se pueden organizar en matrices definidas de la siguiente
manera:
=
2
22
21
0
000
NMODOSω
ωω
λ
L
OM
M
L
[ ]NMODOSφφφ ˆˆˆˆ21 L=Φ (Ec. 2.20)
en donde los autovalores se organizan de forma que 222
210 NMODOSωωω ≤≤≤≤ L . La matriz
λ se denomina la matriz espectral del sistema, mientras que la matriz Φ̂ es la matriz modal
ortonormalizada. Es fácil demostrar sobre la base de la ortonormalidad de la matriz modal
que esta diagonaliza tanto a la matriz de rigidez como a la matriz de masa del sistema:
λ=ΦΦ ˆˆ KT IMT =ΦΦ ˆˆ (Ec. 2.21)
La matriz modal define una transformación entre el espacio de desplazamientos nodales x y
el espacio de amplitudes modales q, dada por:
qx Φ= ˆ (Ec. 2.22)
Sustituyendo esta transformación en la ecuación matricial del modelo dinámico del sistema, y
pre-multiplicando por TΦ̂ , se tiene que
FqKqCqM TTTT Φ=ΦΦ+ΦΦ+ΦΦ ˆˆˆˆˆˆˆ &&& (Ec. 2.23)
lo que resulta en el siguiente sistema que, asumiendo que la matriz de amortiguamiento es
diagonalizable, es tanto estática como dinámicamente desacoplado:

26
Fqqq TΦ=++ ˆλβ &&& (Ec. 2.24)
en el cual β es la matriz de amortiguamiento modal. Tomando como base el sistema
desacoplado mostrado en la ecuación anterior, se puede plantear la forma de espacio de
estados del modelo dinámico del sistema como:
CzyBuAzz
=+=&
(Ec. 2.25)
en donde el espacio de estados z y el vector de entradas u están definidos como,
qzzqz
zz
z&& ==
=
=12
1
2
1 ; Fu = (Ec. 2.26)
y las matrices A, denominada matriz de estados o matriz del sistema, B, llamada matriz de
entradas, y C, denominada matriz de salida, están dadas por:
NMODOSNMODOS
IA
22
0
×
−−
=βλ
NMODOSNMODOS
TB×
Φ
=2
ˆ0
(Ec. 2.27)
[ ] NMODOSNMODOSC 20ˆ×Φ=
Si se desea obtener la respuesta de frecuencia del sistema en alguna posición y en una
determinada dirección, digamos por ejemplo la respuesta lateral en la coordenada xk, debida
a la aplicación de una excitación lateral en la coordenada xj, entonces se tiene que modificar
las matrices de entrada y salida de acuerdo con:

27
jj xNMODOSx ftfF 1
0
1
0
×=
=M
M
NMODOSNMODOS
T tB
×
Φ
=2
ˆ0
(Ec. 2.28)
[ ] Czqrxrxy NMODOS =Φ=== ׈010 1LL (Ec. 2.29)
[ ] NMODOSNMODOSrC 20ˆ×Φ= (Ec. 2.30)
La función de transferencia del sistema, G(s), representa el valor en el dominio de Laplace
de la salida cuando el sistema es sometido a una entrada unitaria. La función de
transferencia puede obtenerse a partir del modelo de espacio de estados del sistema como:
BAIsCsG 1)()( −−= (Ec. 2.31)
El diagrama de respuesta de frecuencia del sistema está dada por el gráfico de la magnitud
de G(s) para ωjs = , es decir, cuando la entrada es una función armónica de amplitud
unitaria y frecuencia ω, versus la frecuencia, esto es:
BAIjCjG 1)()( −−= ωω , ( )max,0 ωω = (Ec. 2.32)

28
2.1.5 Frecuencias críticas de rotación Una vez determinada la respuesta de frecuencia del sistema, se hace necesario evitar que la
sarta opere a velocidades o múltiplos de esas velocidades, que estén en las cercanías de las
frecuencias de resonancia. Según recomendación de API RP 7G, deben evitarse estas
frecuencias por ±15%. En esta sección se formulan las posibles excitaciones inducidas por
los diferentes mecanismos físicos involucrados.
La excitación original se debe a la velocidad de giro de la sarta, esta variable la
denominaremos RPM. En la Tabla 2.1 se presentan las principales frecuencias
dependientes de esta variable y el modo de vibración que afecta.
Otras excitaciones secundarias, como las debidas a los equipos de bombeo de lodo y
turbinas de fondo, deben tomarse en cuenta. Generalmente se consideran frecuencias de
excitación de 1xSPM “strokes per minute” para las bombas de desplazamiento positivo y la
frecuencia de giro del motor de fondo y sus múltiplos.
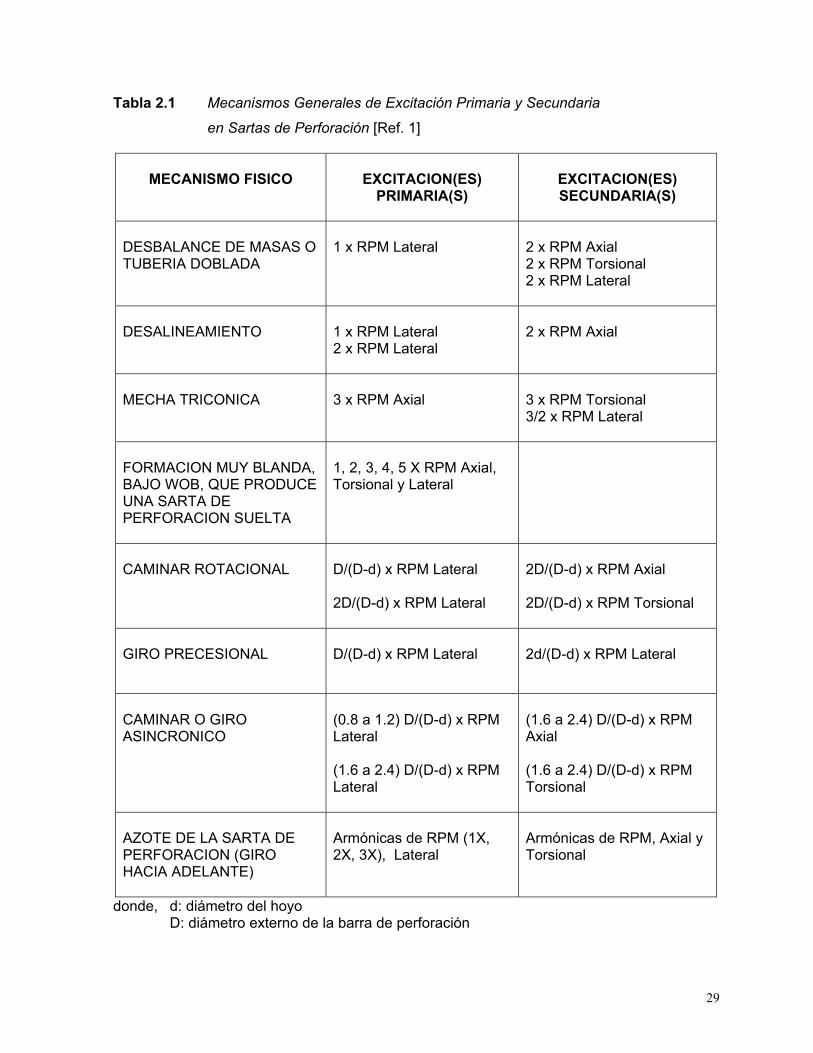
29
Tabla 2.1 Mecanismos Generales de Excitación Primaria y Secundaria
en Sartas de Perforación [Ref. 1]
MECANISMO FISICO
EXCITACION(ES)
PRIMARIA(S)
EXCITACION(ES) SECUNDARIA(S)
DESBALANCE DE MASAS O TUBERIA DOBLADA
1 x RPM Lateral
2 x RPM Axial 2 x RPM Torsional 2 x RPM Lateral
DESALINEAMIENTO
1 x RPM Lateral 2 x RPM Lateral
2 x RPM Axial
MECHA TRICONICA
3 x RPM Axial
3 x RPM Torsional 3/2 x RPM Lateral
FORMACION MUY BLANDA, BAJO WOB, QUE PRODUCE UNA SARTA DE PERFORACION SUELTA
1, 2, 3, 4, 5 X RPM Axial, Torsional y Lateral
CAMINAR ROTACIONAL
D/(D-d) x RPM Lateral 2D/(D-d) x RPM Lateral
2D/(D-d) x RPM Axial 2D/(D-d) x RPM Torsional
GIRO PRECESIONAL
D/(D-d) x RPM Lateral
2d/(D-d) x RPM Lateral
CAMINAR O GIRO ASINCRONICO
(0.8 a 1.2) D/(D-d) x RPM Lateral (1.6 a 2.4) D/(D-d) x RPM Lateral
(1.6 a 2.4) D/(D-d) x RPM Axial (1.6 a 2.4) D/(D-d) x RPM Torsional
AZOTE DE LA SARTA DE PERFORACION (GIRO HACIA ADELANTE)
Armónicas de RPM (1X, 2X, 3X), Lateral
Armónicas de RPM, Axial y Torsional
donde, d: diámetro del hoyo D: diámetro externo de la barra de perforación

30
C A P I T U L O 3
Descripción del Modelo Computacional
3. Estructura del programa El programa consta de 5 módulos principales, que son: pre-procesamiento, determinación de
las características vibratorias laterales, determinación de las características vibratorias
axiales, determinación de las características vibratorias torsionales, y post-procesamiento,
cada uno de los cuales consta de un programa principal y múltiples subrutinas. Los
algoritmos desarrollados para la solución del problema fueron codificados en Matlab para
evaluar su desempeño y proporcionar un prototipo funcional del programa y cada uno de sus
módulos y subrutinas. A continuación se explican y describen cada uno de los módulos
principales.
3.1 Pre-procesamiento La función del módulo de pre-procesamiento es generar la malla de elementos finitos,
condiciones de contorno y arreglos de propiedades de materiales a partir de la información
geométrica y mecánica de la sarta de perforación (elementos de la sarta, geometría de la
sección transversal, inclinación y propiedades mecánicas de cada elemento). El programa de
Matlab pre_pro.m es el modulo principal para la etapa de pre-procesamiento.
3.1.1 Datos de Entrada del Modulo GEOM: Arreglo de cuatro columnas y tantas filas como tramos diferentes tenga la sarta. Un
tramo de sarta se define como una parte de esta que tenga una misma sección transversal,
material, inclinación y claridad radial. La primera columna de este arreglo contiene un
número que identifica las propiedades geométricas y mecánicas de la sección transversal, en
referencia a las filas del arreglo de propiedades PM, que se definirá mas adelante. La
segunda columna contiene la longitud del tramo correspondiente. La tercera columna
contiene la inclinación en grados del tramo. La cuarta columna contiene la claridad radial en

31
el tramo, entendiéndose por claridad radial a la diferencia entre el radio del agujero y el radio
de la sección transversal de la sarta en el tramo en cuestión. Este arreglo se forma
secuencialmente a partir de la mecha hacia arriba. La primera fila entonces siempre
corresponderá a la mecha, la segunda al tramo inmediatamente superior a la mecha, y así
consecutivamente.
GEOM:
PM: Arreglo de 6 columnas y tantas filas como elementos de sección transversal o
materiales diferentes tenga la sarta. La primera columna corresponde al módulo de Young de
la sección; la segunda columna contiene el módulo de corte; la tercera columna contiene el
área de la sección transversal; la cuarta columna contiene el momento de inercia de área
centroidal transversal de la sección; la quinta columna corresponde al momento polar de
inercia de área de la seccón y la sexta columna contiene la densidad del material de la
sección.
PM =
WOB: Peso sobre la mecha. Valor escalar que define el peso aplicado sobre la mecha por el
operador de perforación.
3.1.2 Coordenadas nodales e incidencias Sobre la base de la información suministrada a través de los arreglos GEOM y PM se
efectúa la discretización del dominio para determinar el arreglo de coordenadas nodales X,
tomando en cuenta las longitudes nominales de los elementos para cada tramo dadas en el
arreglo L_el, de dimensiones N_tramos x 1. Así mismo, se determinan incidencias NOC y el
arreglo de definición de perfiles de los elementos MAT. Los elementos tipo estabilizador y
mecha son especiales. La mecha siempre se discretiza como un solo elemento con
# de sección 1 Long. tramo 1 Inclinación 1 Claridad 1 # de sección 2 Long. tramo 2 Inclinación 2 Claridad 2 ... ... ... ...
E1 G1 Area1 I1 J1 ρ1
E2 G2 Area2 I2 J2 ρ2
… … … … … …

32
elasticidad axial concentrada, mientras que el estabilizador siempre se discretiza con 2
elementos, con el nodo central con desplazamiento lateral prescrito.
3.1.3 Condiciones de contorno Las condiciones de contorno están determinadas por los elementos de la sarta y su
ubicación. La mecha, los estabilizadores y la mesa rotaria o top drive representan lugares
donde los desplazamientos axiales, laterales y torsionales pueden estar prescritos. La
prescripción de las condiciones de contorno se hace de dos formas: fijando completamente
el desplazamiento correspondiente, para lo cual se usan los nodos definidos en el arreglo
NRES y los grados de libertad nodales correspondientes en el arreglo RES, o el
desplazamiento puede estar limitado por la presencia de un resorte que lo ancle. En este
caso, los grados de libertad correspondientes se fijan en el arreglo NKC y el valor de la
rigidez correspondiente a cada grado de libertad se determina en KC.
Basándose en la información sobre la ubicación de los elementos mencionados dada en el
arreglo GEOM, el programa pre_pro.m determina los siguientes arreglos:
NRES: arreglo columna que contiene los números de nodos que tienen grados de
libertad completamente prescritos.
RES: arreglo de 4 columnas y tantas filas como nodos con condiciones de contorno,
en donde la primera columna corresponde al grado de libertad (GDL) de desplazamiento
axial, la segunda columna al GDL de desplazamiento lateral, la tercera columna al GDL de
rotación lateral, y la cuarta columna al GDL torsional. El valor de cada elemento del arreglo
es 1 si el GDL está restringido y 0 si no lo está. Cada fila de este arreglo corresponde a un
nodo con algún GDL (axial, lateral o torsional) restringido.
NKC: arreglo columna que contiene los números de nodos que tienen grados de
libertad limitados por elasticidades concentradas.
KC: arreglo de 4 columnas y tantas filas como nodos con condiciones de contorno, en
donde la primera columna corresponde al grado de libertad (GDL) de desplazamiento axial,
la segunda columna al GDL de desplazamiento lateral, la tercera columna al GDL de rotación
lateral, y la cuarta columna al GDL torsional. El valor de cada elemento del arreglo
corresponde a la rigidez concentrada correspondiente al GDL indicado. Cada fila de este
arreglo corresponde a un nodo con algún GDL (axial, lateral o torsional) restringido.

33
3.1.4 Carga por elemento debido a gravedad El módulo PRE_PRO.m invoca a la subrutina CALCULO_P.m para determinar las cargas de
gravedad por unidad de longitud axial y transversal para cada elemento de la malla de
elementos finitos. Esta información será utilizada para el cálculo estático en el módulo de
vibración transversal. La subrutina recibe como entrada las coordenadas nodales X, las
incidencias o conectividades NOC, los perfiles transversales por elemento MAT, y la
definición de los perfiles PM, entre otras variables, y calcula el valor de las fuerzas
transversales y axiales por unidad de longitud para cada elemento en el aire basado en la
inclinación, densidad y area transversal de cada elemento. Estos valores son almacenados
en los arreglos Px y Py, retornados por la subrutina.
3.1.5 Salida del módulo Todas las variables calculadas en las etapas anteriores son agrupadas en la estructura de
datos MODELO, que contiene los arreglos descritos en la siguiente tabla:
Arreglo Definición Dimensión X Coordenadas nodales NNx2 NOC Incidencias por elemento NEx1 MAT Sección transversal por
elemento NEx1
PM propiedades de perfil para cada tramo
NMx6
NRES Nodos con desplazamiento prescrito
NDPx1
RES GDL con desplazamiento prescrito para cada nodo definido en NRES
NDPx4
NMC Nodos con masas concentradas
#NMCx1
MC Valor de la masa concentrada en cada GDL para cada nodo definido en NMC
#NMCx4
NKC Nodos con elasticidades concentradas
#NKCx1
KC Valor de la masa concentrada en cada GDL para cada nodo definido en NKC
#NKCx4
Px Carga de gravedad por unidad de longitud en la dirección transversal por elemento
NEx1
Py Carga de gravedad por unidad de longitud en la dirección axial por elemento
NEx1
CL Claridades nodales NNx1

34
En la estructura de datos MODELO se incluyen variables escalares, que se describen a
continuación:
Variable Descripción DESCRIPCIÓN Breve descripción del caso NN Número total de nodos NE Número total de elementos g Aceleración de gravedad NPR Número de propiedades NEN Número de nodos por elemento NM Número de secciones diferentes RHO_LODO Densidad específica del lodo Bf Factor de flotación WOB Peso sobre la mecha
3.2 Determinación de las características vibratorias transversales
El módulo de determinación de características vibratorias transversales se implementó en
Matlab a través del programa TRANSVERSAL.m. El problema de vibraciones transversales
de la sarta es el mas complejo de los tratados en este proyecto. Esto es porque las
condiciones de contorno del problema no están predeterminadas sobre la base de los
elementos del sistema únicamente, si no que dependen también del contacto de la sarta con
las paredes del hoyo debido a su deflexión estática. Este punto está explicado con mayor
detalle en el capitulo referente a la teoría del método de elementos finitos usada en el
proyecto. Entonces, este módulo de vibraciones transversales está formado por dos sub-
módulos:
a) Sub-módulo de cálculos estáticos, denominado SDSP_ESTATICO_NL.m, que
determina la deflexión estática de la sarta debido a su geometría, inclinación, peso
propio, fuerzas de flotación, peso sobre la mecha y dimensiones del hoyo.
b) Sub-modulo de cálculos dinámicos, denominado SDSP_TRANS.m, que determina los
modos y frecuencias de vibración basado en la geometría, propiedades mecánicas,
peso sobre la mecha, condiciones de contorno permanentes (mecha, estabilizadores,
etc.) y condiciones de contorno debido a la deflexión estática de la sarta,
determinadas con la información suministrada por el sub-módulo
SDSP_ESTATICO_NL.m.

35
3.2.1 Cálculos estáticos: SDSP_ESTATICO_NL.m La función de este programa es determinar la forma deformada de la sarta debido a su peso
propio en el lodo y el peso sobre la mecha, tomando en cuenta la inclinación del hoyo y la
interacción de la sarta con las paredes del hoyo. Este problema es de naturaleza no-lineal,
debido a que los puntos de contacto de la sarta con el hoyo no son conocidos a priori, y solo
se conocerán cuando se conozca la forma deformada de la sarta, por lo que la solución es
iterativa. En términos generales, el programa determina la matriz de rigidez K del sistema y
el vector de cargas nodales equivalentes F debido a las diferentes cargas aplicadas,
tomando como base el elemento marco bidimensional explicado con anterioridad. Una vez
determinadas estas, el programa itera con los desplazamientos resultantes y las condiciones
de contorno hasta que consigue una solución que no viola ni las claridades en los nodos ni
una condición de dirección de las fuerzas de reacción del agujero sobre la sarta. A
continuación se describe con detalle cada uno de los elementos del programa.
La entrada al programa es la estructura de datos MODELO, cuya composición fue descrita
anteriormente. Esta es cargada al disco y “desempacada” a través de la subrutina
UNPACK.m, que toma los elementos de la estructura de datos y los convierte en variables y
arreglos individuales. Una vez hecho esto, se invoca la subrutina
COND_CONTORNO_ESTATICO.m, que toma los arreglos NRES, RES y URES y retorna los
arreglos NU, que contiene los GDL con desplazamiento prescrito, U, con los valores de
desplazamiento prescrito, y ND, que es el número de GDL con desplazamiento prescrito.
Estas son las condiciones de contorno debidas a elementos de la sarta que las generan
(mecha, estabilizadores, mesa rotaria).
En el siguiente paso, el programa inserta en la matriz de rigidez los valores de rigideces
concentradas en los nodos (si las hay), tras lo cual comienza el lazo de formulación y
ensamble de la matriz de rigidez del sistema K y el vector de cargas nodales equivalentes F.
El índice de este lazo va desde el primer hasta el último elemento de la sarta discretizada, en
donde el primer elemento es siempre la mecha. Los pasos efectuados en el lazo de
formación y ensamble de elementos se enumeran a continuación:
a) Se determinan los nodos I1 e I2 que inciden sobre el elemento, así como la sección
y material del elemento I3, a través de los arreglos NOC y MAT.
b) Extracción de las propiedades de la sección del arreglo PM.

36
c) Cálculo de la longitud EL y los cosenos directores CS y SN del elemento, a partir de
las coordenadas globales X.
d) Formación de la matriz de rotación L_mat usando los cosenos directores.
e) Cálculo del vector de cargas nodales equivalentes del elemento Fn, de la fuerza axial
de la sección Fa y del peso acumulado de la sarta W, usando la subrutina
FUERZAS.m.
f) Ensamble del vector de cargas nodales equivalentes del sistema F.
g) Determinación de la matriz de rigidez del elemento SE, usando la subrutina
STIFF_ESTATICA.m.
h) Ensamble de la matriz de rigidez del sistema, usando la subrutina ENSAMBLE.m.
Al terminar la ejecución del lazo, se tienen la matriz de rigidez K y el vector de cargas
nodales equivalentes F del sistema completo. Adicionalmente se ha calculado el peso total
de la sarta W, que se usa para determinar la fuerza ejercida por el malacate en el tope para
mantener el peso sobre la mecha WOB especificado. Esta fuerza es aplicada sobre el grado
de libertad vertical del nodo superior de la sarta. En este punto, se invoca la subrutina
ANAL_ESTATICO_NL.m, que resuelve el problema iterativo de determinar la forma
deformada de la sarta a partir de K y F, tomando en cuenta las condiciones de contorno
predeterminadas y especificadas por NU y U, así como las claridades en los nodos dadas en
el arreglo CL. El algoritmo utilizado en esta rutina fue descrito en la sección de teoría. La
salida de esta subrutina es la salida del programa SDSP_ESTATICO_NL.m, y se describe a
continuación:
Arreglo Definición Dimensión Q Desplazamientos nodales de
la sarta. NQx1
R Reacciones en los estabilizadores, mecha y tope.
#NUx1
R1 Reacciones en los nodos en contacto con las paredes del hoyo.
#NU1x1
NU1 Número de los grados de libertad correspondientes a nodos en contacto con el hoyo.
#NU1x1

37
3.2.2 Cálculos dinámicos: SDSP_TRANS.m El programa SDSP_TRANS.m toma los resultados del programa SDSP_ESTATICO_NL.m,
así como las características mecánicas y geométricas del sistema de la sarta, para
determinar los modos y frecuencias de vibración transversales del sistema. El programa
obtiene la matriz de rigidez y el vector de cargas nodales del sistema, tomando como base el
elemento viga bidimensional. Una vez obtenidos éstos resultados, se introducen las
condiciones de contorno, que incluyen las relacionadas con la existencia de estabilizadores,
mecha y mesa rotaria, y las condiciones de contorno determinadas en
SDSP_ESTATICO_NL.m debidas al apoyo de la sarta con las paredes del hoyo. En este
punto, se calculan los autovalores y autovectores del par de matrices (K,M), a partir de los
cuales se obtienen resultados de modos y frecuencias de vibración. A continuación se
describen en detalle cada uno de los elementos del programa.
Las entradas al programa son la estructura de datos MODELO, descrita anteriormente y que
contiene la descripción completa del sistema, y los resultados del programa
SDSP_ESTATICO_NL.m. Dado que el elemento tipo viga usado en esta etapa del análisis
posee una sola variable independiente, la variable longitudinal, se obtiene la coordenada
nodal longitudinal Xl de cada nodo a partir de las coordenadas bidimensionales X.
Las condiciones de contorno debidas a estabilizadores, mecha y tope para esta etapa del
análisis son extraídas de los arreglos NRES y RES usando la subrutina COND_CONT.m,
que retorna los arreglos NU, con los números de los GDL con desplazamiento prescrito, y la
variable ND, con el número de elementos de NU. A continuación se agregan las masas y
rigideces concentradas que puedan existir debido a la presencia de la mecha u otros
elementos con propiedades concentradas, usando la subrutina EFECTOS_CONC.m, que
produce un vector NMMC de grados de libertad con efectos concentrados basados en el
número del nodo y el tipo de problema. Las entradas a la subrutina, MC y NMC, contienen el
nodo con efecto concentrado y el valor para cada dirección, respectivamente.
Una vez ejecutadas las instrucciones previamente descritas, se procede a formar las
matrices de masa y rigidez de los elementos y a ensamblarlas para formar las matrices del
sistema completo. Esto se hace a través de un lazo cuyo índice varía entre 1 y NE (número
de elementos de la sarta). A continuación se enumeran y explican los pasos cumplidos
dentro del lazo de ensamble:

38
a) Se determinan los nodos I1 e I2 que inciden sobre el elemento, así como la sección
y material del elemento I3, a través de los arreglos NOC y MAT.
b) Extracción de las propiedades de la sección del arreglo PM.
c) Cálculo de la longitud EL del elemento, a partir de las coordenadas longitudinales de
los nodos Xl.
d) Cálculo de los coeficientes de las matrices de masa y rigidez locales.
e) Cálculo de la fuerza axial de la sección F, usado para determinar más adelante la
matriz de rigidez geométrica, y del peso acumulado de la sarta W.
f) Determinación de la matriz de rigidez del elemento SE y la matriz de masa del
elemento ME, usando la subrutina STIFF_TRANS.m.
g) Ensamble de la matriz de rigidez del sistema, usando la subrutina ENSAMBLE.m.
Una vez obtenidas las matrices de masa y rigidez del sistema, se consolidan las condiciones
de contorno debidas a elementos de la sarta y las debidas al contacto de la sarta con el hoyo
en el arreglo NU; luego se obtienen las autovalores y autovectores de la sarta para vibración
lateral, usando la subrutina ANAL_DIN.m. Esta subrutina toma como argumentos las
matrices de masa y rigidez del sistema K y M, además del arreglo NU de grados de libertad
con desplazamientos prescritos, y modifica las matrices de masa y rigidez para introducir las
condiciones de contorno, y finalmente determinar los autovalores y autovectores
ortonormalizados del sistema.

39
3.3 Determinación de las características vibratorias axiales El programa de cálculos dinámicos axiales, SDSP_AXIAL.m, determina los modos y
frecuencias de vibración de la sarta en la dirección longitudinal de la misma. Para determinar
estos parámetros, el programa utiliza información geométrica y mecánica de la sarta de
perforación, así como condiciones de contorno, que están relacionadas con la existencia de
puntos de desplazamiento prescrito debido al contacto de la mecha con la roca, así como la
presencia del malacate en el tope de la sarta para sujetar a la tubería.
Como se mencionó en el capítulo de teoría, los problemas axiales y torsionales son
análogos, por lo que su estructura es casi idéntica, y comparten la mayor parte de las
subrutinas.
3.3.1 Programa SDSP_AXIAL.m El programa SDSP_AXIAL.m toma las características mecánicas y geométricas del sistema
de la sarta, para determinar los modos y frecuencias de vibración axiales del sistema. El
programa obtiene las matrices de masa y rigidez del sistema, tomando como base el
elemento barra unidimensional. Una vez obtenidas éstas, se introducen las condiciones de
contorno, que incluyen las relacionadas con la existencia de estabilizadores, mecha y mesa
rotaria. En este punto, se calculan los autovalores y autovectores del par de matrices (K,M),
a partir de los cuales se obtienen resultados deseados de modos y frecuencias de vibración.
A continuación se describen en detalle cada uno de los elementos del programa.
Las entradas al programa son la estructura de datos MODELO, descrita anteriormente y que
contiene la descripción completa del sistema. Dado que el elemento tipo barra usado en ésta
etapa del análisis posee una sola variable independiente, la variable longitudinal, se obtiene
la coordenada nodal longitudinal Xl de cada nodo a partir de las coordenadas
bidimensionales X.
Las condiciones de contorno debidas a mecha y tope para esta etapa del análisis son
extraídas de los arreglos NRES y RES usando la subrutina COND_CONT.m, que retorna los
arreglos NU, con los números de los GDL con desplazamiento prescrito, y la variable ND,
con el número de elementos de NU. A continuación se agregan las masas y rigideces
concentradas que puedan existir debido a la presencia de la mecha u otros elementos con

40
propiedades concentradas, usando la subrutina EFECTOS_CONC.m, ya descrita en la
sección de cálculos dinámicos transversales.
Una vez ejecutadas las instrucciones previamente descritas, se procede a formar las
matrices de masa y rigidez de los elementos y a ensamblarlas para formar las matrices del
sistema completo. Esto se hace a través de un lazo cuyo índice varía entre 1 y NE. A
continuación se enumeran y explican los pasos cumplidos dentro del lazo de ensamble:
a) Se determinan los nodos I1 e I2 que inciden sobre el elemento, así como la sección
y material del elemento I3, a través de los arreglos NOC y MAT.
b) Extracción de las propiedades de la sección del arreglo PM.
c) Cálculo de la longitud EL del elemento, a partir de las coordenadas longitudinales de
los nodos Xl.
d) Cálculo de los coeficientes de las matrices de masa y rigidez locales.
e) Determinación de la matriz de rigidez del elemento SE y la matriz de masa del
elemento ME, usando la subrutina STIFF_UNID.m.
f) Ensamble de la matriz de rigidez del sistema, usando la subrutina ENSAMBLE.m.
Una vez obtenidas las matrices de masa y rigidez del sistema, se obtienen los autovalores y
autovectores de la sarta para vibración axial, usando la subrutina ANAL_DIN.m, descrita en
la sección de cálculos dinámicos transversales.
3.4 Determinación de las características vibratorias torsionales El programa de cálculos dinámicos torsionales, SDSP_TORSION.m, determina los modos y
frecuencias de vibración de la sarta en la dirección de torsión longitudinal de la misma. Para
determinar estos parámetros, el programa utiliza información geométrica y mecánica de la
sarta de perforación, así como condiciones de contorno, que están relacionadas con la
existencia de puntos de rigidez concentrada debido al contacto de la mecha con la roca.
Como se mencionó anteriormente, los problemas axiales y torsionales son análogos, por lo
que su estructura es casi idéntica, y comparten la mayor parte de las subrutinas.

41
3.4.1 Programa SDSP_TORSION.m El programa SDSP_TORSION.m toma las características mecánicas y geométricas del
sistema de la sarta, para determinar los modos y frecuencias de vibración torsionales del
sistema. El programa obtiene las matrices de masa y rigidez del sistema, tomando como
base el elemento barra torsional unidimensional. Una vez obtenidas estas, se introducen las
condiciones de contorno, relacionadas con la mecha. En este punto, se calculan los
autovalores y autovectores del par de matrices (K,M), a partir de los cuales se obtienen
resultados deseados de modos y frecuencias de vibración. A continuación se describen en
detalle cada uno de los elementos del programa.
Las entradas al programa son la estructura de datos MODELO, descrita anteriormente y que
contiene la descripción completa del sistema. Dado que el elemento tipo barra usado en esta
etapa del análisis posee una sola variable independiente, la variable longitudinal, se obtiene
la coordenada nodal longitudinal Xl de cada nodo a partir de las coordenadas
bidimensionales X.
Las condiciones de contorno debidas a la mecha para esta etapa del análisis son extraídas
de los arreglos NRES y RES usando la subrutina COND_CONT.m, que retorna los arreglos
NU, con los números de los GDL con desplazamiento prescrito, y la variable ND, con el
número de elementos de NU. A continuación se agregan las masas y rigideces concentradas
que puedan existir debido a la presencia de la mecha u otros elementos con propiedades
concentradas, usando la subrutina EFECTOS_CONC.m, ya descrita en la sección de
cálculos dinámicos transversales.
Una vez ejecutadas las instrucciones previamente descritas, se procede a formar las
matrices de masa y rigidez de los elementos y a ensamblarlas para formar las matrices del
sistema completo. Esto se hace a través de un lazo cuyo índice varía entre 1 y NE. A
continuación se enumeran y explican los pasos cumplidos dentro del lazo de ensamble:
a) Se determinan los nodos I1 e I2 que inciden sobre el elemento, así como la sección
y material del elemento I3, a través de los arreglos NOC y MAT.
b) Extracción de las propiedades de la sección del arreglo PM.
c) Cálculo de la longitud EL del elemento, a partir de las coordenadas longitudinales de
los nodos Xl.
d) Cálculo de los coeficientes de las matrices de masa y rigidez locales.

42
e) Determinación de la matriz de rigidez del elemento SE y la matriz de masa del
elemento ME, usando la subrutina STIFF_UNID.m.
f) Ensamble de la matriz de rigidez del sistema, usando la subrutina ENSAMBLE.m.
Una vez obtenidas las matrices de masa y rigidez del sistema, se obtienen los autovalores y
autovectores de la sarta para vibración torsional, usando la subrutina ANAL_DIN.m, descrita
en la sección de cálculos dinámicos transversales.
3.5 Post-procesamiento Este modulo es el encargado de determinar la respuesta de frecuencia del sistema a partir
de los resultados de salida de los programas de procesamiento para posteriormente ser
comparada con las frecuencias de excitación descritas en la Tabla 2.1.
Para obtener la respuesta de frecuencia en un nodo determinado dada la excitación en otro
nodo de interés, se utiliza el programa RF.m
3.5.1 Programa RF.m
Este programa determina la respuesta de frecuencia del sistema en un grado de libertad
determinado, para los resultados arrojados por los módulos de procesamiento
SDSP_TRANS.m, SDSP_AXIAL.m y SDSP_TORSION.m, basándose en la aplicación de
una excitación en un grado de libertad especificado. Los datos de entrada del programa son
la matriz modal y la matriz de frecuencias (phi_hat y omega respectivamente). Se considera
un amortiguamiento de 1% para cada modo y se toman en cuenta solo los modos de
vibración con frecuencias inferiores a 30 Hz (1800 RPM) Estos valores pueden ser
modificados según conveniencia del programador o usuario.
Para obtener la respuesta de frecuencias se generan las ecuaciones de espacio de estados
del modelo, representadas por las matrices A, B y C respectivamente (Ver Ec. 2.30) y se
resuelven estas ecuaciones para el cálculo de la función de transferencia G en valores
discretos de la frecuencia (Ec. 2.34). Esto se lleva a cabo reduciendo las matrices antes
mencionadas a la forma superior de Hessenberg mediante la subrutina ELMHES.m, luego se
obtiene la matriz compleja AIjH −= ω , a la cual se le aplica una factorización LU mediante
la subrutina CHEFA.m. Esta forma factorizada de H es invertida y multiplicada por B en la

43
subrutina CHESL.m mediante retro-sustitución. La subrutina SCL1.m calcula la norma L1 de
un número complejo, y es invocada desde CHEFA.m.

44
3.6 Resumen de subrutinas y definición de variables PRE_PRO Subrutina de pre-procesamiento para generar la malla de elementos finitos. Variables de entrada: GEOM, PM, RHO_LODO, WOB Variables de Salida: X, NOC, MAT, PM, NRES, RES, NMC, MC, NKC, KC, Px, Py, CL, NN, NE, g, NPR, NEN, NM, RHO_LODO, Bf, WOB SDSP_ESTATICO_NL Subrutina para cálculo de deformación estática de la sarta. Variables de entrada: X, NOC, MAT, PM, NPR, NM, NE, NEN, NN, NRES, RES, NMC, MC, NKC, KC, RHO_LODO, WOB, F, URES, Px, Py, g, Bf, CL Funciones Invocadas: cond_cont_estatico, efectos_conc, fuerzas, stiff_estatica, ensamble, anal_estatico_nl, mostrar_desplaz Variables de Salida: Q, R, R1, NU1 SDSP_TRANS Subrutina para cálculo de modos y frecuencias de vibración transversales. Variables de entrada: X,NOC,MAT,PM,NPR,NM,NE,NEN,NN,NRES,RES,NMC,MC,NKC,KC,RHO_LODO, WOB,F,URES,Px,Py,g,Bf,CL Funciones Invocadas: cond_cont, efectos_conc, stiff_trans, nuevas_cond_cont_laterales, ensamble, anal_din Variables de Salida: SE,ME, phi_hat SDSP_AXIAL Subrutina para cálculo de modos y frecuencias de vibración axiales. Variables de entrada: X,NOC,MAT,PM,NPR,NM,NE,NEN,NN,NRES,RES,NMC,MC,NKC,KC,RHO_LODO, WOB,F,URES,Px,Py,g,Bf,CL Funciones Invocadas:

45
cond_cont, efectos_conc, stiff_unid, ensamble, anal_din Variables de Salida: SE,ME, phi_hat SDSP_TORSION Subrutina para cálculo de modos y frecuencias de vibración torsionales. Variables de entrada: X,NOC,MAT,PM,NPR,NM,NE,NEN,NN,NRES,RES,NMC,MC,NKC,KC,RHO_LODO, WOB,F,URES,Px,Py,g,Bf,CL Funciones Invocadas: cond_cont, efectos_conc, stiff_unid, ensamble, anal_din Variables de Salida: SE,ME, phi_hat RF Subrutina para determinación de la respuesta de frecuencia del sistema. Variables de entrada: phi_hat, omega Funciones Invocadas: elmhes, chefa, chesl, scl1 Variables de Salida: G, omegas
Variable Definición Unidades Dimensión GEOM Arreglo de 4 columnas y tantas filas como
tramos tenga la sarta. Las columnas están definidas como: Columna 1: Tipo de Elemento (1: Mecha, 2: Estabilizador, etc.) Columna 2: Longitud del elemento Columna 3: Inclinación del elemento Columna 4: Claridad entre sarta y hoyo para el elemento
pies grados
pulg
#Tramos X 4
PM Arreglo de 6 columnas y tantas filas como elementos de sección o materiales diferentes tenga la sarta. Las columnas están definidas como: Columna 1: Modulo de Young (E#) Columna 2: Modulo de Corte (G#) Columna 3: Área de la Sección (AREA#)
Lbs/pulg2
Lbs/pulg2
pulg2
#Secc X 6

46
Columna 4: Momento de Inercia (SMI#) Columna 5: Momento de Inercia (SMJ#) Columna 6: Densidad del Material (RHO#)
pulg4
pulg4
Lbf*s2/pulg4
RHO_LODO Densidad del lodo
Lbs/Gal Escalar
WOB Peso sobre la mecha Lbf Escalar X Coordenadas Nodales Pie NNx2 NOC Incidencias por elemento - NEx1 MAT Sección transversal por elemento Pulg2 NEx1 NRES Nodos con desplazamiento prescrito - NDPx1 RES GDL con desplazamiento prescrito para cada
nodo definido en NRES - NDPx4
NMC Nodos con masas concentradas - #NMCx1 MC Valor de la masa concentrada en cada GDL
para cada nodo definido en NMC - #NMCx4
NKC Nodos con elasticidades concentradas - #NKCx1 KC Valor de la masa concentrada en cada GDL
para cada nodo definido en NKC - #NKCx4
Px Carga de gravedad por unidad de longitud en la dirección transversal por elemento
- NEx1
Py Carga de gravedad por unidad de longitud en la dirección axial por elemento
- NEx1
CL Claridades nodales - NNx1 DESCRIPCIÓN
Breve descripción del caso - Cadena Texto
NN Número total de nodos - Escalar NE Número total de elementos - Escalar NPR Número de propiedades - Escalar NEN Número de nodos por elemento - Escalar NM Número de secciones diferentes - Escalar Bf Factor de flotación - Escalar F Vector de Cargas Nodales - 3NNx1 Q Desplazamientos nodales de la sarta. Pulg NQx1 R Reacciones en los estabilizadores, mecha y
tope. Lbf, Lbfxpulg #NUx1
R1 Reacciones en los nodos en contacto con las paredes del hoyo.
Lbf #NU1x1
NU1 Número de los grados de libertad correspondientes a nodos en contacto con el hoyo.
- #NU1x1
SE (estático) Matriz de rigidez del elemento - 6x6 ME (estático) Matriz de masa del elemento - 6x6 SE (axial) Matriz de rigidez del elemento - 2x2 ME (axial) Matriz de masa del elemento - 2x2 SE (transversal)
Matriz de rigidez del elemento - 4x4
ME (transversal)
Matriz de masa del elemento - 4x4

47
SE (torsional) Matriz de rigidez del elemento - 2x2 ME (torsional) Matriz de masa del elemento - 2x2 Phi_hat Matriz modal ortonormalizada - NQxNQ omega Matriz de frecuencias Rad/s NQ G Vector de respuesta de frecuencia compleja
del sistema #omegasx1

48
C A P I T U L O 4
Pruebas y Análisis de Resultados
En este capítulo se incluyen varias de las pruebas que se efectuaron utilizando los
programas antes descritos y sus comparaciones con otros modelos y/o pruebas
experimentales que han sido publicadas.
Se realizaron comparaciones en cuanto a los modos de vibración laterales, axiales y
torsionales, en los casos en los que estaban disponibles en la literatura. En los modos de
vibración laterales se verificó la longitud del ensamblaje de fondo que estaba libre de vibrar;
y por último se comparó la respuesta de frecuencia amortiguada para cada uno de los casos.
Al momento de realizar una comparación cuantitativa de los resultados en los casos de los
análisis dinámicos axiales y torsionales arrojados por el programa, es importante tener en
cuenta que estos son altamente dependientes de las condiciones de contorno fijadas en la
mecha. En los resultados obtenidos experimentalmente y por otros autores no se
especifican los valores utilizados, ni las condiciones de la interacción roca-mecha. Por lo
tanto se recurre a la comparación cualitativa de las graficas de los modos de vibración para
estos casos.

49
CASO DE ESTUDIO SDP-01
La SDP-01 posee una longitud de 698 pies, fue utilizada para recolectar datos de un pozo
experimental perforado en cemento (Ref. 1), también fue analizada por Burgess-McDaniel-
Das [Ref. 9] para los casos de vibración lateral.
Figura 4.1 – Configuración Esquemática de la SDP-01
LONG: 121.9 FT
HWDP
O.D.: 3-1/2"I.D.: 2-1/16"
LONG: 529.1 FT
I.D.: 2-1/4"O.D.: 4-3/4"
DC
LONG: 30.8 FT
I.D.: 2-1/4"O.D.: 4-3/4"
DC
BLADE O.D.: 6-1/4"
O.D.: 4-3/4"I.D.: 2-1/4"
STAB
LONG: 6.6 FT
STAB
BLADE O.D.: 6-1/4"LONG: 6.4 FT
O.D.: 4-3/4"I.D.: 2-1/4"
BIT
LONG: 3.25 FTO.D.: 6-1/4"
CASO: SPE 15560 BHA#1
INCL: 1.0 DEG
WOB: 15.00 KLB
DIAM. HOYO: 6-1/4"
LONG TOT: 698.1 FT

50
En la Figura 4.1 se representan esquemáticamente los componentes de la SDP-01 y su
ensamble. Se consideró un diámetro del hoyo de 6.25 pulg., una densidad de lodo de 10
lbs/gal, se discretizó el sistema para cada 2.5 pies de longitud, se utilizó un peso sobre la
mecha de 15 KLbs y una inclinación de hoyo de 1o y se obtuvo del análisis estático el primer
punto de contacto tubería-hoyo por encima del último estabilizador a 104 pies. desde la
mecha (Figura 4.2).
-0.6 -0.4 -0.2 0 0.2 0.4 0.60
100
200
300
400
500
600
Desp. lateral (in)
Long
(Ft)
Figura 4.2 – Deformación Estática Lateral de la SDP-01

51
Con esta configuración se obtuvieron los modos de vibración lateral del BHA de la SDP-01
(Figura 4.3) y la respuesta de frecuencias del sistema (Figura 4.4).
0 100 200 300 400 500 600 700-0.6
-0.4
-0.2
0
0.2
Distancia desde la Mecha (ft) - frecuencia: 78.9612 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700-1
-0.5
0
0.5
Distancia desde la Mecha (ft) - frecuencia: 191.6257 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.3 - Modos de Vibración Lateral del BHA de la SDP-01
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
x 10-4 Respuesta de Frecuencia
Frecuencia (RPM)
Am
plitu
d N
orm
aliz
ada
(ft)
Figura 4.4 – Frecuencias de Resonancia Lateral del BHA de la SDP-01

52
Fijando la condición de contorno axial en la mecha en 30000 Lbs/pulg se obtuvieron los
modos de vibración axial de la sarta de perforación (Figura 4.5) y su respuesta de
frecuencias (Figura 4.6)
0 100 200 300 400 500 600 700-0.2
-0.15
-0.1
-0.05
0
Distancia desde la Mecha (ft) - frecuencia: 377.7487 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700-0.2
-0.1
0
0.1
0.2
Distancia desde la Mecha (ft) - frecuencia: 1033.0165 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.5 - Modos de Vibración Axial de la SDP-01
0 500 1000 15000
1
2
3
4
5
6
x 10-4 Respuesta de Frecuencia
Frecuencia (RPM)
Am
plitu
d N
orm
aliz
ada
(ft)
Figura 4.6 – Frecuencias de Resonancia Axiales de la SDP-01

53
Los modos de vibración torsionales de la sarta se muestran en la Figura 4.7 y su respuesta
de frecuencia en la Figura 4.8
0 100 200 300 400 500 600 700-0.1
-0.08
-0.06
-0.04
-0.02
0
Distancia desde la Mecha (ft) - frecuencia: 248.4636 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700-0.15
-0.1
-0.05
0
0.05
0.1
Distancia desde la Mecha (ft) - frecuencia: 733.2961 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.7 - Modos de Vibración Torsional de la SDP-01
0 500 1000 15000
1
2
3
4
5
6
x 10-6 Respuesta de Frecuencia
Frecuencia (RPM)
Am
plitu
d N
orm
aliz
ada
(ft)
Figura 4.8 – Frecuencias de Resonancia Torsionales de la SDP-01

54
Para los modos de vibración laterales se uso como referencia de comparación el estudio
realizado por Burgess-McDaniel-Das [Ref. 9]. Se obtuvieron excelentes resultados tanto en
la deformación estática de la sarta como en los modos de vibración laterales del BHA. (Tabla
4.1)
Los modos axiales y torsionales, se comparan cualitativamente con las gráficas obtenidas
con el modelo de Pasley, obteniéndose excelentes resultados.
Tabla 4.1 – Comparación de Resultados para la SDP-01
Modos de Vibración Modelo desarrollado
Modelo de Pasley1
Datos Experimentales
Burgess-McDaniel-Das9
Primer modo Lateral del BHA (Hz)
Segundo modo lateral del BHA (Hz)
1.31
3.19
- -
- -
1.26
3.16
Primer modo Axial de la Sarta (Hz)
6.29
8.80
4.42 – 10.20
-
Primer modo Torsional de la Sarta (Hz)
4.15
4.20
4.50 – 4.70
-

55
CASO DE ESTUDIO SDP-02
La SDP-02 posee la misma configuración de la SDP-01 pero con un total de 606 pies, como
se muestra en la Figura 4.9
LONG: 30.42 FT
HWDP
O.D.: 3-1/2"I.D.: 2-1/16"
LONG: 529.1 FTI.D.: 2-1/4"O.D.: 4-3/4"
DC
LONG: 30.8 FT
I.D.: 2-1/4"O.D.: 4-3/4"
DC
BLADE O.D.: 6-1/4"
O.D.: 4-3/4"I.D.: 2-1/4"
STAB
LONG: 6.6 FT
STAB
BLADE O.D.: 6-1/4"LONG: 6.4 FT
O.D.: 4-3/4"I.D.: 2-1/4"
BIT
LONG: 3.25 FTO.D.: 6-1/4"
CASO: SPE 15560 BHA#2
INCL: 1.0 DEG
WOB: 15.00 KLB
DIAM. HOYO: 6-1/4"
LONG TOT: 606 FT
Figura 4.9 – Configuración Esquemática de la SDP-02

56
En la Figura 4.10 se representa la deformación estática de la sarta y los puntos de contacto
con las paredes del hoyo.
-0.6 -0.4 -0.2 0 0.2 0.4 0.60
100
200
300
400
500
600
Desp. lateral (in)
Long
(Ft)
Figura 4.10 – Deformación Estática Lateral de la SDP-02

57
Los dos primeros modos de vibración lateral, axial y torsional se muestran en las Figuras
4.11, 4.12 y 4.13 respectivamente
0 100 200 300 400 500 600 700-0.2
0
0.2
0.4
0.6
Distancia desde la Mecha (ft) - frecuencia: 99.5986 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700-0.2
0
0.2
0.4
0.6
0.8
Distancia desde la Mecha (ft) - frecuencia: 210.7669 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.11 - Modos de Vibración Lateral del BHA de la SDP-02
0 100 200 300 400 500 600 7000
0.05
0.1
0.15
0.2
Distancia desde la Mecha (ft) - frecuencia: 466.1704 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700-0.2
-0.1
0
0.1
0.2
Distancia desde la Mecha (ft) - frecuencia: 1213.4173 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.12 - Modos de Vibración Axial de la SDP-02

58
0 100 200 300 400 500 600 7000
0.02
0.04
0.06
0.08
0.1
Distancia desde la Mecha (ft) - frecuencia: 259.1069 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700-0.1
-0.05
0
0.05
0.1
Distancia desde la Mecha (ft) - frecuencia: 777.1897 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.13 - Modos de Vibración Torsional de la SDP-02
En la Tabla 4.2 se muestran las frecuencias axiales y torsionales para el primer modo
obtenidas con el modelo desarrollado y se comparan con los resultados obtenidos con el
modelo de Pasley y con los valores experimentales.
Tabla 4.2 – Comparación de Resultados para la SDP-02
Modos de Vibración de la Sarta
Modelo Desarrollado
Modelo de Pasley1
Datos Experimentales1
Primer modo Axial (Hz)
7.76
7.90
7.76
Primer modo Torsional (Hz)
4.32
4.40
4.4 – 5.2

59
CASO DE ESTUDIO SDP-03
La SDP-03 posee una configuración similar a la SDP-01 pero con un total de 390 pies, como
se muestra en la Figura 4.14
343.3 FTI.D.: 2-1/4"O.D.: 4-3/4"
DC
LONG: 30.8 FT
I.D.: 2-1/4"O.D.: 4-3/4"
DC
BLADE O.D.: 6-1/4"
O.D.: 4-3/4"I.D.: 2-1/4"
STAB
LONG: 6.6 FT
STAB
BLADE O.D.: 6-1/4"LONG: 6.4 FT
O.D.: 4-3/4"I.D.: 2-1/4"
BIT
LONG: 3.25 FTO.D.: 6-1/4"
CASO: SPE 15560 BHA#3
INCL: 1.0 DEG
WOB: 15.00 KLB
DIAM. HOYO: 6-1/4"
LONG TOT: 390 FT
Figura 4.14 – Configuración Esquemática de la SDP-03

60
Se obtuvieron todos los modos de vibraciones laterales, axiales y torsionales, aunque solo se
comparan los dos últimos (Figura 4.3), debido a que no se encontró información en la
literatura para los modos laterales de este modelo.
Tabla 4.3 – Comparación de Resultados para la SDP-03
Modos de Vibración de la Sarta
Modelo Desarrollado
Modelo de Pasley1
Datos Experimentales1
Primer modo Axial (Hz)
12.06
10.60
11.80
Primer modo Torsional (Hz)
6.35
7.55
6.06

61
CASO DE ESTUDIO SDP-04
La SDP-04 fue analizada por Spanos-Rice-Payne [Ref. 3] para determinar su respuesta de
frecuencia lateral. En la Figura 4.15 se representa esquemáticamente su configuración.
Figura 4.15 – Configuración Esquemática de la SDP-04
BIT
LONG: 3 FTO.D.: 12-1/4"
LONG TOT: 168 FT
DIAM. HOYO: 12-1/4"
WOB: 30.00 KLB
INCL: 1.0 DEG
CASO: IADC/SPE 23905
STAB - BLADE O.D.: 12-1/4"O.D. 8" I.D. 2-13/16" L: 5 FT
I.D.: 2-13/16"LONG: 10.0 FT
O.D.: 8"DC
O.D. 8" I.D. 2-13/16" L: 5 FTSTAB - BLADE O.D.: 12-1/4"
LONG: 30 FT
I.D.: 2-13/16"O.D.: 8"
DC
O.D. 8" I.D. 2-13/16" L: 5 FTSTAB - BLADE O.D.: 12-1/4"
O.D. 6.75" I.D. 2-13/16" L: 5 FTSTAB - BLADE O.D.: 12-1/4"
LONG: 30 FT
I.D.: 2-13/16"O.D.: 6.75"
DC
I.D.: 2-13/16"
LONG: 60 FT
O.D.: 6.75"
DC
O.D. 6.75" I.D. 2-13/16" L: 5 FTSTAB - BLADE O.D.: 12-1/4"
I.D.: 2-13/16"LONG: 10.0 FT
O.D.: 6.75"DC
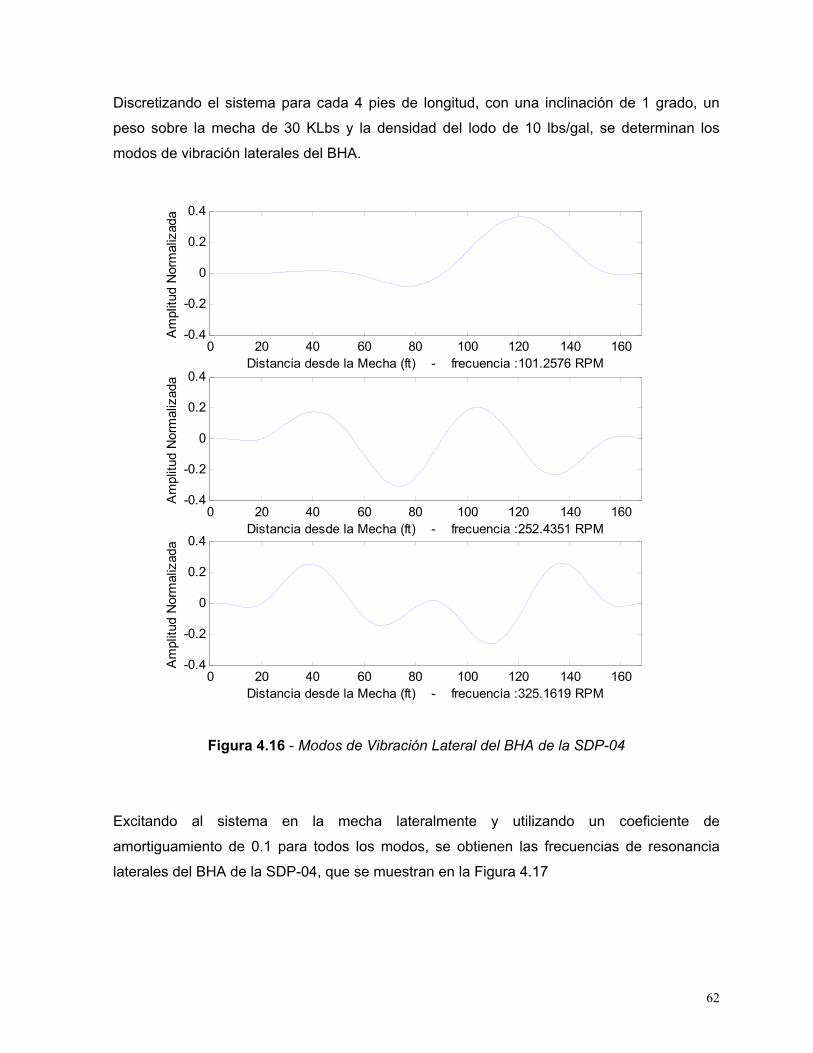
62
Discretizando el sistema para cada 4 pies de longitud, con una inclinación de 1 grado, un
peso sobre la mecha de 30 KLbs y la densidad del lodo de 10 lbs/gal, se determinan los
modos de vibración laterales del BHA.
0 20 40 60 80 100 120 140 160-0.4
-0.2
0
0.2
0.4
Distancia desde la Mecha (ft) - frecuencia :101.2576 RPM
Am
plitu
d N
orm
aliz
ada
0 20 40 60 80 100 120 140 160-0.4
-0.2
0
0.2
0.4
Distancia desde la Mecha (ft) - frecuencia :252.4351 RPM
Am
plitu
d N
orm
aliz
ada
0 20 40 60 80 100 120 140 160-0.4
-0.2
0
0.2
0.4
Distancia desde la Mecha (ft) - frecuencia :325.1619 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.16 - Modos de Vibración Lateral del BHA de la SDP-04
Excitando al sistema en la mecha lateralmente y utilizando un coeficiente de
amortiguamiento de 0.1 para todos los modos, se obtienen las frecuencias de resonancia
laterales del BHA de la SDP-04, que se muestran en la Figura 4.17

63
0 50 100 150 200 250 300 350 400 450 5000
0.2
0.4
0.6
0.8
1
1.2
1.4
x 10-5 Respuesta de Frecuencia
Frecuencia (RPM)
Am
plitu
d N
orm
aliz
ada
(ft)
Figura 4.17 – Frecuencias de Resonancia Lateral del BHA de la SDP-04
En la Tabla 4.4 se muestran las frecuencias de los modos de vibración lateral obtenidos y se
comparan con los resultados de Spanos-Rice-Payne [Ref. 3].
Tabla 4.4 – Comparación de Resultados para la SDP-04
Modos de Vibración del BHA
Modelo Desarrollado Spanos-Rice-Payne3
Primer modo Lateral (Hz)
1.68
1.70
Segundo modo Lateral (Hz)
4.20
4.20
Tercer modo Lateral (Hz)
5.42
5.20

64
CASO DE ESTUDIO SDP-05
La SDP-05 fue analizada por Burgess-McDaniel-Das. [Ref. 9]
BIT
LONG: 0.8 FTO.D.: 8-1/2"
LONG TOT: 877.7 FT
DIAM. HOYO: 8-1/2"
WOB: 50.00 KLB
INCL: 1.0 DEG
CASO: SPE/IADC 16109 EX#2
LONG: 42.5 FT
MWD
I.D.: 2-1/4"O.D.: 7"
O.D. 7" I.D. 2-1/4"PRS - L: 2.7 FT
STAB - BLADE O.D.: 8-1/2"O.D. 7" I.D. 2-1/4" L: 5.3 FT
I.D.: 2-1/4"
LONG: 72.0 FT
O.D.: 7"
DC
O.D. 7" I.D. 2-1/4" L: 4.1 FTSTAB - BLADE O.D.: 8-1/2"
LONG: 31.2 FT
I.D.: 2-1/4"O.D.: 7"
DC
O.D. 7" I.D. 2-1/4" L: 3.8 FTSTAB - BLADE O.D.: 8-1/2"
LONG: 311 FT
O.D.: 7"I.D.: 2-1/4"
DC
O.D. 7" I.D. 2-1/4" L: 4.3 FTSTAB - BLADE O.D.: 8-1/2"
LONG: 400 FTI.D.: 3"O.D.: 5"
HWGT
Figura 4.18 – Configuración Esquemática de la SDP-05

65
Discretizando el sistema para cada 3 pies de longitud, con una inclinación de 1 grado, un
peso sobre la mecha de 50 KLbs y una densidad del lodo de 10 lbs/gal se obtiene la
deformación estática de la sarta y los puntos de contacto con la pared del hoyo (Figura 4.19).
-1.5 -1 -0.5 0 0.5 1 1.50
100
200
300
400
500
600
700
800
Desp. lateral (in)
Long
(Ft)
Figura 4.19 – Deformación Estática Lateral de la SDP-05

66
Los primeros modos de vibración lateral del BHA de la SPD-05 se muestran en la Figura
4.20 y su respuesta de frecuencia en la Figura 4.21
0 100 200 300 400 500 600 700 800 900-0.4
-0.3
-0.2
-0.1
0
0.1
Distancia desde la Mecha (ft) - frecuencia: 78.8913 RPM
Am
plitu
d N
orm
aliz
ada
0 100 200 300 400 500 600 700 800 900-0.1
0
0.1
0.2
0.3
0.4
Distancia desde la Mecha (ft) - frecuencia: 128.5266 RPM
Am
plitu
d N
orm
aliz
ada
Figura 4.20 - Modos de Vibración Lateral del BHA de la SDP-05
0 50 100 150 200 2500
1
2
3
4
5
x 10-6 Respuesta de Frecuencia
Frecuencia (RPM)
Am
plitu
d N
orm
aliz
ada
(ft)
Figura 4.21 – Frecuencias de Resonancia Lateral del BHA de la SDP-05

67
En la Tabla 4.5 se muestran las frecuencias de los modos de vibración lateral obtenidos y se
comparan con los resultados de Burgess-McDaniel-Das [Ref. 9].
Tabla 4.5 – Comparación de Resultados para la SDP-05
Modos de Vibración del BHA
Modelo Desarrollado Burgess-McDaniel-Das 9
Primer modo Lateral (Hz)
1.31
1.39
Segundo modo Lateral (Hz)
2.14
2.18

68
Conclusiones
1. Se desarrolló un programa computacional basado en el método de elementos finitos,
que permite determinar los modos de vibración transversales, axiales y torsionales de la
sarta de perforación y su respuesta de frecuencia a una excitación determinada, el cual
fue validado mediante la comparación con otros estudios de simulación y pruebas
experimentales.
2. Para una sarta de perforación promedio de una longitud de 1000 pies, discretizada con
una longitud de elementos de 2.5 pies, el tiempo de corrida del programa desarrollado es
de aproximadamente 9 segundos, utilizando un computador Pentium III de 1.1 GHz y
515 Mb de memoria RAM.
3. En función de la rapidez de ejecución, el programa puede ser utilizado en campo para
precisar los rangos de operación segura o los cambios a realizar en la configuración del
BHA, para minimizar los riesgos de fallas durante el proceso de perforación.
4. El programa determina efectivamente los puntos de contacto entre la sarta y el hoyo, de
tal manera se puede determinar la longitud de la sarta que está libre de vibrar
transversalmente.
5. Se utilizó una longitud de elementos menor a 2.5 pies, ya que estudios de sensibilidad
indican que este espaciado es necesario para obtener una información de autovalores
confiables.

69
Recomendaciones
1. Con la finalidad de mejorar la precisión de los resultados en los análisis dinámicos
axiales y torsionales, es necesario profundizar en los estudios de la interacción roca-
mecha, ya que las frecuencias de vibración en estos casos son altamente dependientes
de la condición de contorno que se utiliza en la mecha.
2. Se recomienda elaborar un programa de pre-procesamiento en un ambiente que permita
la fácil inclusión de los diferentes elementos de la sarta, con la finalidad de facilitar su
utilización en tiempo real en el pozo.

70
Referencias Bibliográficas
1. A.A. Besaisow & M.L. Payne, “A Study of Excitation Mechanism and Resonances Inducing BHA Vibrations”. SPE 15560, 1986.
2. Eck-Olsen, Johan, “Directional Drilling”. Noruega, Revisión 1995. 3. P.D. Spanos, Rice, U. & M.L. Payne, “Advances in Dynamic Bottomhole Assembly
Modeling and Dynamic Response Determination”. IADC/SPE 23905, 1992. 4. Apostal, M.C., Haduch, G.A., Williams, J.B., “A Study to Determine the Effect of
Damping on Finite-Element-Based, Forced-Frequency-Response Models for Bottomhole Assembly Vibration Analysis”. SPE 20458, 1990.
5. Birades Michel, “Static and Dynamic Tridimensional BHA Computer Models”. SPE
15466, 1998. 6. Clayer, F., Vandiver, J.K. & Lee, H.Y., “The Effect of Surface and Downhole Boundary
Conditions on the Vibration of Drillstrings”. SPE 20447, 1990. 7. J.W. Nicholson, “An Integrated Approach to Drilling Dynamics Planning,
Identification and Control”. IADC/SPE-27537, 1994. 8. Ly Zifeng, Ma Xingui & Huang Wenhu, "A 3D Analysis of Bottom Hole Assembly
Under Large Deflection". SPE 28288, 1994. 9. T.M. Burgess, G.L. McDaniel & P.K. Das, "Improving BHA Tool Reliability With
Drillstring Vibration Models: Field Experience and Limitations". SPE/IADC 16109, 1987.
10. M.B. Allen, "BHA Lateral Vibration: Case Studies and Evaluation of Important
Parameters". SPE/IADC 16110, 1987. 11. V.A. Dunayevsky, Fereidoun Abbassian & Arnis Judzis, "Dynamic Stability of Drillstring
Under Fluctuating Weight on Bit". SPE 14329, 1993.
12. William Weaver, Jr. & Paul R. Johnston, "Structural Dynamics by Finite Elements". Prentice-Hall, Inc.
Top Related