





Idiomas
Páginas
Jurídico


ROBOTICA INDUSTRIAL
I. Introducción a la Robotica
I. 1 Concepto
Robot, máquina controlada por ordenador y programada para moverse, manipular
objetos y realizar trabajos a la vez que interacciona con su entorno. Los robots son capaces
de realizar tareas repetitivas de forma más rápida, barata y precisa que los seres humanos.
El término procede de la palabra checa robota, que significa “trabajo obligatorio”; fue
empleado por primera vez en la obra teatral de 1921 R.U.R. (Robots Universales de
Rossum) por el novelista y dramaturgo checo Karel Capek. Desde entonces se ha empleado
la palabra robot para referirse a una máquina que realiza trabajos para ayudar a las
personas o efectúa tareas difíciles o desagradables para los humanos.
Mikell Groover, en su libro Automation, Production Systems and Computer
Integrated Manufacturing, define al robot industrial como "...una máquina programable,
de propósito general, que posee ciertas características antropomórficas, es decir,
con características basadas en la figura humana..."
Cabe destacar que la característica antropomórfica más común en nuestros días es la
de un brazo mecánico, el cual realiza diversas tareas industriales.
P á g i n a P p a l . A p u n t e s I n g e n i e r i a U n i v e r s i d a d e s B u s c a r
Página 1 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Existen en el mercado diversas empresas dedicadas a la fabricación de robots
industriales por lo que existen diferentes marcas y modelos. Estos últimos son normalmente
asignados para identificarlos o de acuerdo a su función.
La Robótica es una nueva tecnolog ía, que surgi ó como tal aproximadamente hacia el
año 1960, desde entonces han transcurrido pocos años y el interés que ha despertado es
superior a cualquier previsión que en su nacimiento se pudiera formular, siguiendo un
proceso paralelo a la introducci ón de los ordenadores en las actividades cotidianas de la
vida del hombre, aunque si bien todavía los robots no han encontrado la vía de penetración
en los hogares, pero sí son un elemento ya imprescindible en la mayoría de las industrias.
Podemos contemplar la robótica como una ciencia que aunque se han conseguido
grandes avances todavía ofrece un amplio campo para el desarrollo y la innovación y es
precisamente este aspecto el que motiva a muchos investigadores y aficionados a los robots
a seguir adelante planteando cada vez robots más evolucionados.
Sí, los aficionados a los robots también juegan un papel importante en el desarrollo
de la robótica, ya que son estos los que partiendo de una afición firme y con sus
particulares ideas, al cabo de un cierto tiempo, han podido desarrollar sus teorías y con ello
crear un precedente o mejorar un aspecto que se tenía olvidado o no se había contado con
el en un principio.
El auge de la Robótica y la imperiosa necesidad de su implantación en numerosas
instalaciones industriales, requiere el concurso de un buen número de especialistas y
aficionados en la materia.
La Robótica es una tecnología multidisciplinar, ya que esta hace uso de los recursos
que le proporcionan otras ciencias afines, solamente hay que pensar que en el proceso de
diseño y construcción de un robot intervienen muchos campos pertenecientes a otras ramas
de la ciencia, como pueden ser;
P La Mecánica
Página 2 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

P La Electrónica
P La informática
P La automática
P La matemática
entre otras muchas que no por no citarlas no sean importantes.
Realmente la Robótica es una combinación de todas las disciplinas expuestas y otras
muchas, más el conocimiento de la aplicación a la que se enfoca, por lo que su estudio se
hace especialmente indicado en las carreras de Ingeniería Superior y Técnica y en los
centros de Formación Profesional.
La Robótica brinda a investigadores y aficionados un vasto y variado campo de
trabajo, lleno de objetivos y en estado inicial de desarrollo.
Muy importante es acercar esta ciencia al hombre de a pie ya que de este
acercamiento depende en gran medida el futuro que esta ciencia promete, hay que
desmitificar el mito malo creado en la sociedad de la palabra "ROBOT" a raíz de simples
películas de ciencia-ficción, los robots no son malvados ni nada por el estilo, los robots son
lo que los hombres quieran que lleguen a ser.
I.2 Historia
E l concepto de máquinas automatizadas se remonta a la antigüedad, con mitos de
seres mecánicos vivientes. Los autómatas, o máquinas semejantes a personas, ya
aparec ían en los relojes de las iglesias medievales, y los relojeros del siglo XVIII eran
famosos por sus ingeniosas criaturas mecánicas.
Algunos de los primeros robots empleaban mecanismos de realimentación para
corregir errores, mecanismos que siguen empleándose actualmente. Un ejemplo de
control por realimentaci ón es un bebedero que emplea un flotador para determinar el
nivel del agua. Cuando el agua cae por debajo de un nivel determinado, el flotador baja,
Página 3 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

abre una válvula y deja entrar más agua en el bebedero. Al subir el agua, el flotador
también sube, y al llegar a cierta altura se cierra la válvula y se corta el paso del agua.
E l primer auténtico controlador realimentado fue el regulador de Watt, inventado
en 1788 por el ingeniero británico James Watt. Este dispositivo constaba de dos bolas
metálicas unidas al eje motor de una máquina de vapor y conectadas con una válvula que
regulaba el flujo de vapor. A medida que aumentaba la velocidad de la máquina de vapor,
las bolas se alejaban del eje debido a la fuerza centrífuga, con lo que cerraban la válvula.
Esto hacía que disminuyera el flujo de vapor a la máquina y por tanto la velocidad.
El control por realimentación, el desarrollo de herramientas especializadas y la
división del trabajo en tareas más pequeñas que pudieran realizar obreros o máquinas
fueron ingredientes esenciales en la automatización de las fábricas en el siglo XVIII. A
medida que mejoraba la tecnología se desarrollaron máquinas especializadas para tareas
como poner tapones a las botellas o verter caucho líquido en moldes para neumáticos. Sin
embargo, ninguna de estas máquinas tenía la versatilidad del brazo humano, y no podían
alcanzar objetos alejados y colocarlos en la posición deseada.
El desarrollo del brazo artificial multiarticulado, o manipulador, llevó al moderno
robot. El inventor estadounidense George Devol desarrolló en 1954 un brazo primitivo que
se podía programar para realizar tareas específicas. En 1975, el ingeniero mecánico
estadounidense Víctor Scheinman, cuando estudiaba la carrera en la Universidad de
Stanford, en California, desarrolló un manipulador polivalente realmente flexible conocido
como Brazo Manipulador Universal Programable (PUMA, siglas en inglés). El PUMA era
capaz de mover un objeto y colocarlo en cualquier orientación en un lugar deseado que
estuviera a su alcance. El concepto básico multiarticulado del PUMA es la base de la
mayoría de los robots actuales.
I.2.1 Cronología
Página 4 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

_A mediados del siglo XVII J. de Vaucanson construyó varias muñecas mecánicas de
tamaño humano que ejecutaban piezas de música.
_1801 J. Jacquard inventó su telar, que era una máquina programable para la urdimbre
_1805 H. Maillardet construyó una muñeca mecánica capaz de hacer dibujos.
_1946 El inventor americano G. C. Devol desarrolló un dispositivo controlador que podía
registrar señales eléctricas por medios magnéticos y reproducirlas para accionar una
máquina mecánica. La patente de Estados Unidos correspondiente se emiti ó en 1952.
_1951 Trabajo de desarrollo con teleoperadores (manipuladores de control remoto) para
manejar materiales radioactivos. Patentes de Estados Unidos relacionadas emitidas para
Goertz (1954) y Bergsland (1958).
_1952 Una máquina prototipo de control numérico fue objeto de demostración en el
Instituto de Tecnología de Massachusetts después de varios años de desarrollo. Un lenguaje
de programación de piezas denominado APT (Automatically Programmed Tooling –
Herramental Automáticamente Programado) se desarrolló posteriormente y se publicó en
1961.
_l954 El inventor británico C. W. Kenward solicitó una patente para diseño de robot,
Patente británica emitida en 1957.
_l954 G. C. Devol desarrolla diseños para «transferencia de artículos programada». Patente
de Estados Unidos emitida para diseño en l961.
_l959 Se introdujo el primer robot comercial por Planet Corporation. Estaba controlado por
interruptores de tin de carrera y levas.
_1960 Se introdujo el primer robot «Unimate», basado en la «transferencia de artículos
programada» de Devol. Utilizaba los principios del control numérico para el control del
manipulador y era un robot de transmisión hidráulica.
_1961 Un robot Unimate se instaló en la Ford Motor Company para atender una máquina de
fundición en troquel.
Página 5 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
_1966 Trallfa, una firma noruega, construyó e instaló un robot de pintura por pulverización.
_1968 Un robot móvil llamado «Shakey» se desarrolló en SRI (Stanford Research Institute).
Estaba provisto de una diversidad de sensores, incluyendo una cámara de visión y sensores
táctiles, y pod ía desplazarse por el suelo.
_1971 El «Stanford Arm», un pequeño brazo de robot de accionamiento eléctrico, se
desarrolló en Stanford University.
_1973 Se desarrolló en SRI el primer lenguaje de programación de robot del tipo de
computadora para la investigación con la denominación WAVE. Fue seguido por el lenguaje
AL en 1974. Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL
comercial para Unimation por Víctor Scheinman y Bruce Simano.
_1974 ASEA introdujo el robot IRb6 de accionamiento completamente eléctrico.
_l974 Kawasaki, bajo licencia de Unimation, instaló un robot para soldadura por arco para
estructuras de motocicletas.
_1974 Cincinnati Milacron introdujo el robot T ’ con control por computadora.
_1975 El robot «Sigma» de Olivetti se utiliz ó en operaciones de montaje, una de las
primitivas aplicaciones de la robótica al montaje.
_1976 Un dispositivo de Remote Center Compliance (RCC) para la inserción de piezas en la
línea de montaje se desarrolló en los laboratoios Charles Stark Draper Labs en Estados
Unidos.
_l978 Se introdujo el robot PUMA (Programmable Universal Machine for Assembly) para
tareas de montaje por Unimation, basándose en diseños obtenidos en un estudio de la
General Motors.
_l978 El robot T’ de Cincinnati Milacron se adaptó y programó para realizar operaciones de
taladrado y circulación de materiales en componentes de aviones, bajo el patrocinio de Air
Force ICAM (Intcgrated Computer-Aided Manufacturing).
Página 6 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
_l979 Desarrollo del robot del tipo SCARA (Selective Compliance Arm for Robotic Assembly)
en la TJniversidad de Yamanashi en Japón para montaje. Varios robots SCARA comerciales
se introdujeron hacia 1981.
_l980 Un sistema robótico de captación de recipientes fue objeto de demostración en la
Universidad de Rhode Island. Con el empleo de la visi ón de máquina, el sistema era capaz
de captar piezas con orientaciones aleatorias y posiciones fuera de un recipiente.
_1981 Se desarrolló en la Universidad Carnegie -Mellon un robot de impulsión directa.
Utilizaba motores eléctricos situados en las articulaciones del manipulador sin las
transmisiones mecánicas habituales empleadas en la mayoría de los robots.
_1982 IBM introduce el robot RS-1 para montaje, basado en varios años de desarrollo
interno. Se trata de un robot de estructura de caja que utiliza un brazo constituido por tres
dispositivos de deslizamiento ortogonales. El lenguaje de robot AML, desarrollado por IBM,
se introdujo también para programar el robot RS-I.
_1983 Informe emitido sobre la investigación en Westinghouse Corp. bajo el patrocinio de
National Science Foundation sobre un «sistema de montaje programable-
adaptable» (APAS), un proyecto piloto para una línea de montaje automatizada flexible con
el empleo de robots.
_1984 Varios sistemas de programación fuera de línea se demostraron en la exposición
Robots 8. La operación típica de estos sistemas permitía que se desarrollaran programas de
robot utilizando gráficos interactivos en una computadora personal y luego se cargaban en
el robot.
I.3 La Robótica en la Ciencia Ficción
No obstante las limitaciones de las máquinas robóticas actuales, el concepto popular
de un robot es que tiene apariencia humana y que actúa como un ser humano. Este
concepto humanoide ha sido inspirado y estimulado por varias narraciones de ciencia
Página 7 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

ficción. Una de las primeras obras importantes a este respecto fue una novela de Mary
Shelley, publicada en Inglaterra en 1817. Con el título de Frankenstein, la narración se
refiere a los esfuerzos de un científico, el doctor Frankenstein, para crear un monstruo
humanoide que luego produjo estragos en la comunidad local. La narración ha sido
popularizada en varias versiones a través de los años, plasmada en varias producciones
cinematográficas. La imagen en la pantalla cinematográfica del monstruo de Frankenstein
salió fuera de los planes de su bien intencionada creadora para producir una impresión
duradera en las mentes de millones de personas. Esta impresión ha dado lugar a que los
robots se asimilen a imágenes similares de ciencia y tecnología con un cierto peligro de
locura homicida. Una obra checoslovaca publicada en el año 1917 por Karel Capek,
denominada Rossum’s Universal Robots, dio lugar al término robot. La palabra checa
«robota» significa servidumbre o trabajador forzado, y cuando se tradujo al inglés se
convirti ó en el término robot. Dicha narración se refiere a un brillante científico llamado
Rossum y su hijo, quienes desarrollan una sustancia química que es similar al protoplasma.
Utilizan esta sustancia para fabricar robots, y sus planes consisten en que los robots sirvan
a la clase humana de forma obediente y para realizar todos los trabajos físicos. Rossum
prosigue realizando mejoras en el diseño de los robots, eliminando órganos y otros
elementos innecesarios, y final- mente desarrolla un ser «perfecto». El argumento
experimenta un giro desagradable cuando los robots perfectos comienzan a no cumplir con
su papel de servidores y se rebelan contra sus dueños, destruyendo toda vida humana.
Entre los escritores de ciencia ficción, Isaac Asimov ha contribuido con varias narraciones
relativas a robots, comenzando en 1939, y a él se atribuye el acuñamiento del término
«robótica». La imagen de un robot que aparece en su obra es el de una máquina bien
diseñada y con una seguridad garantizada que actúa de acuerdo con tres principios. Estos
principios fueron denominados por Asimov las Tres Leyes de la Robótica, y son:
? Un robot no puede actuar contra un ser humano o, mediante la inacción, permitir
que un ser humano sufra daños.
? Un robot debe obedecer las órdenes dadas por los seres humano, salvo que estén
Página 8 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

en conflicto con la Primera Ley.
? Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las
dos primeras leyes.
Varias películas cinematográficas y de televisión han añadido al saber popular de la
robótica algunos robots que actúan de servidores amistosos y compañeros de aventuras en
diferentes maneras. La película titulada The Day the Earth Stood Still, de 1951, tenía como
argumento una misión desde un planeta lejano enviada a la Tierra en un platillo volante
para intentar establecer las bases para la paz entre las naciones del Universo. La tripulación
del platillo volante estaba constituida solamente por dos miembros, un ser humanoide y un
robot omnisciente, omnipotente e indestructible, llamado Gort. EI robot era un
empedernido conservador de la paz «universal», y cuando un planeta se «descarriaba» su
castigo era inmediato y terminante. La misión a la Tierra no fue un éxito completo
(evidentemente), pero puso de manifiesto el terrible poder destructivo de las armas
La película 2001: Una odisea del espacio, de l968, no tenía como protagonista a un robot
mecánico, sino a una computadora parlante muy inteligente llamada HAL. El trabajo de la
computadora era vigilar y controlar los sistemas a bordo de la nave espacial en su camino
al planeta Júpiter y ser un amigo y compañero de la tripulación de la nave. Durante la
travesía falla uno de los circuitos de HAL y su personalidad se hace mala. Comienza a
asesinar a los miembros de la tripulación para protegerse a sí misma, y sólo se detiene en
una lucha final entre ella misma y el miembro de la tripulación restante. La serie de La
Guerra de las Galaxias (Guerra de las Galaxias en 1977, El Imperio contraataca en 1980 y
El retorno del Jedi en 1983) presentaba a los robots como máquinas amistosas e
inofensivas. Los robots R2D2 y C3PO son capaces de desplazarse en todas direcciones, son
inteligentes y pueden comunicarse con sus dueños humanos. No desempeñan papeles
importantes en estas películas, salvo los de carácter cómico. Sin embargo, para los
espectadores de estas películas son personajes importantes porque son tan benevolentes y
representan las oportunidades ofrecidas por la robótica y otras tecnolog ías avanzadas para
ser de utilidad y no constituir ninguna amenaza para los seres humanos.
Página 9 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

I.4 Clasificación de los Robots
Una clasificación del grado de complejidad del Robot puede establecerse de la
siguiente forma:
Robots de primera generación:
Dispositivos que actúan como "esclavo" mecánico de un hombre, quien provee
mediante su intervención directa el control de los órganos de movimiento. Esta transmisión
tiene lugar mediante servomecanismos(2) actuados por las extremidades superiores del
hombre, caso típico manipulaci ón de materiales radiactivos, obtención de muestras
submarinas, etc.
Robots de segunda generación:
El dispositivo actúa automáticamente sin intervención humana frente a posiciones
fijas en las que el trabajo ha sido preparado y ubicado de modo adecuado ejecutando
movimientos repetitivos en el tiempo, que obedecen a lógicas combinatorias, secuenciales,
programadores paso a paso, neumáticos o Controladores Lógicos Programables (PLC).
Un aspecto muy importante está constituido por la facilidad de rápida
reprogramación que convierte a estos Robots en unidades "versátiles" cuyo campo de
aplicación no sólo se encuentra en la manipulación de materiales sino en todo los procesos
de manufactura, como por ejemplo: en el estampado en frío y en caliente asistiendo a las
máquinas-herramientas para la carga y descarga de piezas. En la inyección de
termoplásticos y metales no ferrosos, en los procesos de soldadura a punto y continúa en
tareas de pintado y reemplazando con ventaja algunas operaciones de máquinas
convencionales.
Robots de tercera generación:
Son dispositivos que habiendo sido construidos para alcanzar determinados objetivos
serán capaces de elegir la mejor forma de hacerlo teniendo en cuenta el ambiente que los
Página 10 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

circunda.
Para obtener estos resultados es necesario que el robot posea algunas condiciones
que posibiliten su interacción con el ambiente y los objetos. Las mínimas aptitudes
requeridas son: capacidad de reconocer un elemento determinado en el espacio y la
capacidad de adoptar propias trayectorias para conseguir el objetivo deseado.
Los métodos de identificación empleados hacen referencia a la imagen óptica por ser
esta el lenguaje humano en la observación de los objetos, sin embargo no puede
asegurarse que la que es natural para el nombre, constituye la mejor solución para el robot.
I.5 Cómo funcionan los robots
El componente principal lo constituye el manipulador, el cual consta de varias
articulaciones y sus elementos.
Las partes que conforman el manipulador reciben los nombres de: cuerpo, brazo,
muñeca y efector final. Al efector final se le conoce comúnmente como sujetador o
gripper.
Página 11 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Vamos a centrar nuestra atención en los elementos de las articulaciones. Cada
articulación provee al robot de al menos un "grado de libertad". En otras palabras, las
articulaciones permiten al manipulador realizar movimientos:
• Lineales que pueden ser horizontales o verticales.
• Por articulación.
Página 12 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
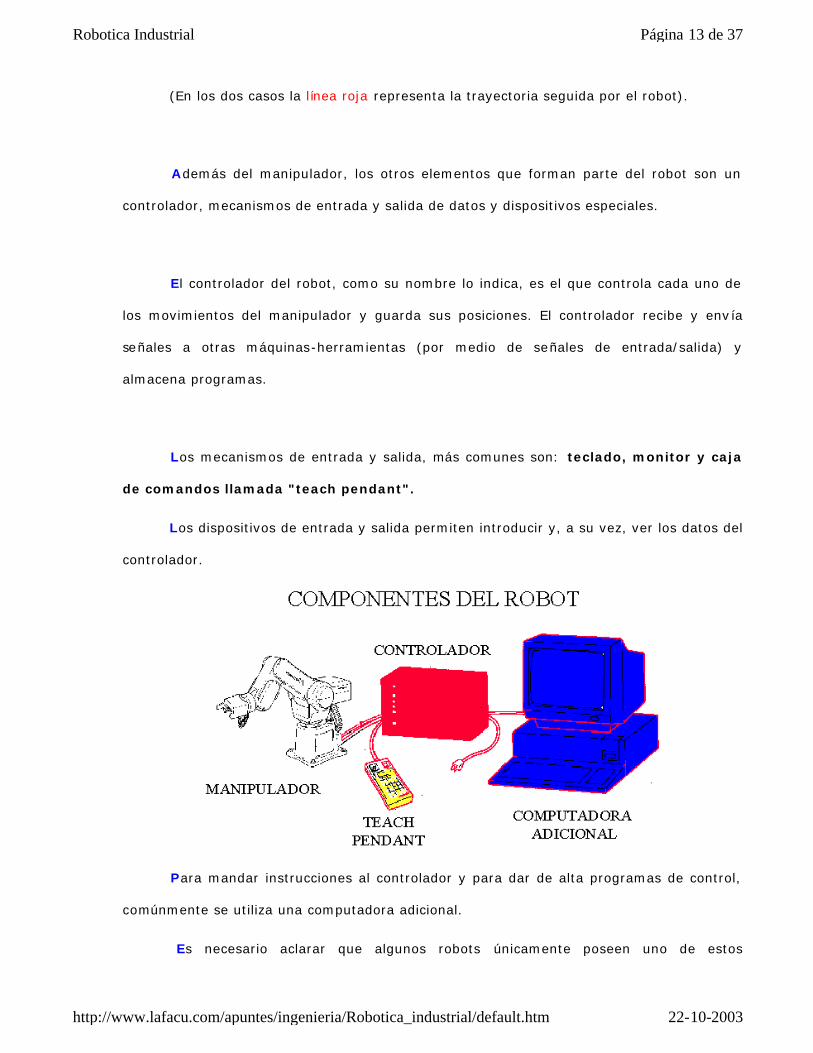
(En los dos casos la línea roja representa la trayectoria seguida por el robot).
Además del manipulador, los otros elementos que forman parte del robot son un
controlador, mecanismos de entrada y salida de datos y dispositivos especiales.
El controlador del robot, como su nombre lo indica, es el que controla cada uno de
los movimientos del manipulador y guarda sus posiciones. El controlador recibe y envía
señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y
almacena programas.
Los mecanismos de entrada y salida, más comunes son: teclado, monitor y caja
de comandos llamada "teach pendant".
Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del
controlador.
Para mandar instrucciones al controlador y para dar de alta programas de control,
comúnmente se utiliza una computadora adicional.
Es necesario aclarar que algunos robots únicamente poseen uno de estos
Página 13 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

componentes. En estos casos, uno de los componentes de entrada y salida permite la
realización de todas las funciones. Esto lo podemos ver en el robot Júpiter, el cual se
puede programar utilizando el "teach pendant". En el caso del robot del AS/RS, éste se
puede programar y enseñar sus posiciones a través de un teclado y monitor conectado
directamente al controlador.
En otros casos, es indispensable conectar una computadora al controlador del robot.
Ejemplo de ello es el robot Move Master (Mitsubishi), el cual requiere una
computadora externa para realizar y cargar los programas del controlador.
Señales de entrada y salida:
Las señales de entrada y salida se obtienen mediante tarjetas electrónicas instaladas
en el controlador del robot las cuales le permiten tener comunicación con otras máquinas-
herramientas.
Página 14 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

En la celda de manufactura, por ejemplo, se utilizan estas tarjetas para comunicar al
robot PUMA con las máquinas de control numérico (torno y centro de máquinado). Estas
tarjetas se componen de relevadores los cuales mandan señales eléctricas que después son
interpretadas en un programa de control, estas señales nos permiten controlar cuando debe
entrar el robot a cargar una pieza a la máquina, cuando debe empezar a funcionar la
máquina o el robot, etc.
Pasemos ahora a los dispositivos especiales. Entre los dispositivos especiales se
encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones
de ensamble, que son utilizadas para sujetar las distintas piezas de trabajo.
En la estación del robot Move Master EX (Mitsubishi) podemos encontrar los
siguientes dispositivos especiales:
Ø Estación de posición sobre el transportador para la carga/descarga de piezas de
trabajo.
Ø Eje transversal para aumentar el volumen de trabajo del robot.
Página 15 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Ø Estación de inspección por computadora integrada con el robot.
Ø Estación de ensamble.
Con todos estos dispositivos el robot cuenta con señales de entrada/salida para
poder realizar la integración de su función incorporando estos elementos.
Efector final (gripper):
E l efector final (griper) es un dispositivo que se une a la muñeca del brazo del robot
con la finalidad de activarlo para la realización de una tarea específica. La razón por la que
existen distintos tipos de efectores finales es, precisamente, por las funciones que realizan.
Los diversos tipos podemos dividirlos en dos grandes categorías: pinzas y herramientas.
Las pinzas han sido diseñadas para que el robot cargue y descargue objetos,
transporte materiales y ensamble piezas.
Los tipos de pinzas más comunes pertenecen al tipo llamado pivotante. Los dedos
de la pinza giran en relación con los puntos fijos del pivote. De esta manera, la pinza se
abre y se cierra.
Página 16 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Otro tipo de pinzas se denominan de movimiento lineal. En este caso, los dedos se
abren y se cierran ejecutando un movimiento paralelo entre sí.
Al momento de diseñar una pinza deben tomarse en cuenta la forma y peso de la
pieza de trabajo así como el tipo de movimiento que harán los dedos. Con estos
lineamientos, se puede asegurar una buena sujeción, de tal forma que la pinza no
modifique o dañe la estructura de la pieza.
Una regla general es que la pinza debe sujetar a la pieza de trabajo de su centro de
gravedad, esto ocasiona que se anulen los momentos que se pudieran generar por el peso
de la pieza de trabajo.
Para reducir los tiempos de ciclo en operaciones de carga y descarga de piezas a
máquinas-herramientas se pueden diseñar efectores finales con doble pinza.
Existen otros tipos de pinzas como ventosas, pinzas magnéticas y pinzas adhesivas.
Dependiendo de la aplicación se puede sustituir las pinzas por herramientas.
Ejemplo: el robot SCARA ha sido provisto de una herramienta, un desarmador, con
el objeto de atornillar los relevadores que se utilizan en estas tarjetas.
Página 17 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

El robot que aparece en la siguiente figura tiene un dispositivo en su muñeca para
aplicaciones de soldadura.
En este robot el efector final consiste de una serie de sensores que puede tener diversas
aplicaciones (medición, inspección).
Grados de libertad
Sin duda, una de las principales características que definen a los robots lo constituye
los "grados de libertad" que posea. Hablar de "grados de libertad" equivale a decir
número y tipo de movimientos del manipulador.
Observando los movimientos del brazo y de la muñeca, podemos determinar el
número de grados de libertad que presenta un robot.
Generalmente, tanto en el brazo como en la muñeca, se encuentra una variación que
va desde uno hasta los tres grados de libertad.
A la muñeca de un manipulador le corresponden los siguientes movimientos o
Página 18 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

grados de libertad: giro (hand rotate), elevación (wrist flex) y desviación(wrist rotate) como
lo muestra el siguiente modelo.
Cabe hacer notar que existen muñecas que no pueden realizar los tres tipos de
movimiento.
Las muñecas, tanto del robot del sistema de almacenamiento y reposición
automática (AS/RS) como la del robot Júpiter, muestran únicamente un grado de
libertad de giro.
Por su parte, la muñeca del robot MoveMaster Mitsubishi está diseñada para
realizar movimientos de giro y de elevación. Es decir, presenta dos grados de libertad.
Los grados de libertad del brazo de un manipulador están directamente relacionados
con su anatomía, o configuración.
I.5.1 Sistemas de percepción
"Tropezando con uno y otro tronco, avanzando maquinalmente hacia la fuente,
camina la vaca en solitario. Es ciega."
JOAN MARAGALL, La vaca ciega.
"Las máquinas más antiguas y, en particular, las tentativas más antiguas para
fabricar autómatas, operaban sobre la buse de un mecanismo de relojería cerrado. Pero las
Página 19 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
máquinas automáticas modernas... están dotadas de órganos sensoriales, es decir, de
receptores para los mensajes que provienen del exterior.
NORBERT WIENER,
The human use of human beings. Cybernetics and Society.
La capacidad de un robot industrial para realizar tareas complejas, adaptarse a
posibles variaciones de su entorno y afrontar situaciones imprevistas, viene condicionada en
gran manera por el sistema de percepción de que esté dotado. En efecto, es el sistema de
percepción el que proporciona al robot la posibilidad de obtener e interpretar la información
de su entorno en vistas a acomodar su actuación a las condiciones cambiantes del mismo.
La información ambiental captada por dicho sistema permite el establecimiento de una
realimentación, es decir, de una evaluación por parte del robot del efecto de sus propias
acciones sobre su entorno, con la consiguiente modificación de estas últimas. Un robot sin
percepción puede operar únicamente en contextos restringidos especialmente preparados
para él, en los que por medios manuales o maquinaria específica se ha realizado un proceso
previo de ordenaci ón. En algunos casos, el costo de la instalación y de la mano de obra
necesarias para conseguir estas condiciones puede incluso hacer no rentable la utilización
de ese robot. Por otra parte, a medida que aumentan las exigencias de flexibilidad de los
procesos productivos, y las tareas y situaciones en ellos involucradas se hacen más
complejas, la necesidad de disponer de robots dotados de percepción deviene más
aparente. Por este motivo, es enorme el esfuerzo que actualmente se está desarrollan- do
tanto en centros de investigación como en ámbitos industriales con la finalidad de crear
sistemas de percepción capaces de dotar al robot de una eficaz comunicación con su
entorno de trabajo, satisfaciendo al propio tiempo los requisitos que el medio industrial
impone. La percepción artificial constituye un problema difícil cuya resolución requiere la
aportación de diferentes campos del conocimiento y, en su forma general, exigir ía la
utilización de herramientas tecnológicas aún no disponibles. En su aplicación a la robótica,
este problema queda agravado por limitaciones como tiempo de proceso, coste, fiabilidad y
Página 20 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
simplicidad. Como contrapartida, sin embargo, la posibilidad de definir el escenario y los
objetos con que se desenvolverá el robot en su trabajo permite, generalmente, la utilización
de soluciones parciales mucho más simples que las exigidas por un planteamiento general.
En cualquier caso, no son aún muy numerosas las aplicaciones industriales reales que
uso de auténticos sistemas de percepción, si bien es de esperar su importante expansión en
los próximos anos. Los sensores utilizados en los sistemas de percepción pueden ser
clasificados en dos grandes grupos: sensores de contacto y sensores a distancia. Una
estrategia, que ha demostrado su eficacia en la manipulación de objetos por robots
industriales, es la de emplear sensores a distancia para las mediciones globales de baja
resolución y sensores de contacto para las locales de mayor precisión. Por ejemplo, un
sensor visual puede suministrar la información necesaria para guiar el elemento terminal de
un robot hacia una pieza situada en una posición y orientación no conocidas previamente.
Sensores de contacto, dispuestos en el propio elemento terminal, facilitarán entonces la
correcta aprehensión de la pieza. Entre los diversos sistemas de percepción posibles, los de
rango de aplicación más amplio son los de percepción táctil y los de percepción visual. Los
primeros hacen uso de sensores de contacto, mientras los segundos incorporan sensores a
distancia. El presente capítulo, tras describir brevemente el proceso de la percepción, pasa
a analizar sus fases de forma detallada. En cada una de ellas, tanto los aspectos generales
como los específicos de la percepción táctil y de la percepción visual son descritos. A
continuación, pasa revista a los requisitos principales impuestos a los sistemas de
percepción por el entorno industrial de trabajo y, finalmente, se esbozan unas breves
conclusiones.
I.5.1.1 El Proceso de la Percepción
Puede parecer a primera vista que la percepción artificial no entraña grandes
dificultades y que, en todo caso, el problema consiste fundamentalmente en disponer de
sensores adecuados para captar la informaci ón ambiental. La experiencia cotidiana parece
Página 21 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
refrendar plenamente esta impresi ón, habida cuenta de la increíble facilidad que poseen no
sólo el ser humano sino incluso animales poco evolucionados, para reconocer formas,
vengan éstas dadas en forma visual, acústica o táctil. No obstante, nada más alejado de la
realidad, ya que la percepci ón mediante técnicas computacionales ha resultado una tarea
extraordinariamente ardua y compleja.
Si nos centramos, por ejemplo, en la percepción visual, el estudio de la visión
humana puede arrojar cierta luz sobre la naturaleza de los problemas involucrados en el
diseño de sistemas de percepción, así como aportar sugerencias para su concepción y
desarrollo. Esta aportación será inevitablemente de carácter muy general y nunca a nivel de
implementación, ya que las características de los elementos que componen uno y otro
sistema son muy dispares. Pasemos brevemente revista a estas aportaciones. En primer
lugar, hay que subrayar la importancia de la experiencia cognoscitiva previa en la
interpretación de una imagen. Una persona no ve niveles de gris caprichosamente
repartidos en una superficie bidimensional, ni tampoco ve contornos, ni saltos bruscos de
intensidad, ni ninguna otra característica definida numéricamente sobre una matriz. Lo que
una persona realmente ve son objetos tridimensionales con los que ha sido familiarizado en
el transcurso de su vida. He aquí la diferencia entre sensación y percepción. La sensación es
la información captada por nuestros receptores; la percepción incluye además la
interpretación dada a esa información gracias a la experiencia previa obtenida en
situaciones semejantes. En segundo lugar, destaca la enorme importancia del contexto.
Una misma forma bidimensional será interpretada de muy distinta manera según los
objetos que la rodeen y el marco en la que esté encuadrada. Un mapa de carreteras y un
esquema de los vasos sanguíneos de un órgano tienen un aspecto similar, pero el contexto
en que son examinados elimina toda posible ambigüedad. Otro factor importante a tener en
cuenta es el principio gestáltico de que "el todo es más que la suma de las partes". Hay
características que sólo pueden ser captadas a nivel global y desaparecen en cuanto se
analiza localmente la imagen. Otros dos factores relevantes, ampliamente conocidos, son la
visión estereoscópica, que suministra información tridimensional, y el proceso en paralelo.
Página 22 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Señalemos, finalmente, que las metas y objetivos que se persigan tienen una influencia
decisiva en el proceso de percepción desarrollado. Todo lo expuesto parece indicar que la
interpretación de una sensaci ón no puede basarse únicamente en la información contenida
en la misma, sino que requiere la cooperación de otras fuentes de información como
puedan ser la experiencia, el contexto y los objetivos perseguidos. Esta circunstancia es la
causa de que la mayoría de los sistemas de percepción artificial desarrollados hasta la fecha
tengan un área de aplicación muy restringida, puesto que utilizan técnicas propias de un
dominio muy concreto. La solución ha de basarse en un dif ícil compromiso que combine la
información captada por los sensores con la almacenada en la memoria del computador,
fruto de la experiencia, el contexto y los objetivos. Un énfasis excesivo en la primera no
permite una interpretación correcta, mientras que un excesivo peso de la segunda
produciría alucinaciones en el sistema que vería cosas que real- mente no existen.
Metodológicamente, podemos dividir el proceso de percepción en tres fases distintas y en
cierta forma secuenciales, ya que cada una de ellas parte de los resultados de la fase
anterior. Este secuenciamiento no es, sin embargo, estricto por cuanto los resultados de
una fase pueden llevar a desencadenar nuevamente fases previas oportunamente
modificadas.
I.5.1.2 Fases del proceso de percepción.
Las tres fases del proceso de percepción son: adquisición, tratamiento e
interpretación. La fase de adquisición está encomendada fundamentalmente a los sensores
que, basados en principios físicos adecuados, captan un tipo específico de información
ambiental y lo disponen en la forma requerida por la siguiente fase. Esta fase, por tanto, es
enormemente dependiente del tipo de percepción de que se trate y en muchos casos
requerirá la conjunción de varios sensores de igual o distinta naturaleza que,
conjuntamente, obtengan la informaci6n necesaria. Dentro de esta fase está incluida una
primera elaboración de la información como puede ser el escalado y la digitalización, Las
disciplinas más importantes en esta fase serán la electrónica y ciertos campos específicos
de la física. Su aportación a la siguiente fase será, en general, una representación matricial
Página 23 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

cuantitativa y digitalizada de la información ambiental adquirida. La segunda fase, de
tratamiento de la información captada por la anterior, puede abarcar aspectos muy diversos
tales como corrección de distorsiones, eliminación de ruido, reducción del volumen de
información, segmentación y ex- tracción de características y primitivas. Cada uno de estos
aspectos tendrá una importancia variable en función, por un lado, del tipo, calidad y
cantidad de la información suministrada por la primera fase y, por otro, de los requisitos de
la tercera. Así, por ejemplo, una información con una baja relación señal/ruido exigirá
normalmente la utilización de algoritmos de reducción de ese ruido. Es posible, sin
embargo, en algunos casos que la fase de interpretación sea insensible a ese ruido, con lo
que el tratamiento indicado resultaría superfluo en esas circunstancias. Si la información
suministrada por la fase de adquisición es insuficiente o inadecuada para que la fase de
tratamiento cumpla adecuadamente su función, será necesario desencadenar nuevamente
aquélla con las modificaciones oportunas para solventar la insuficiencia. Por ejemplo, en el
caso de un sistema de percepción visual puede ser necesario reenfocar la cámara o
modificar su encuadre. Las técnicas de base utilizadas en esta segunda fase son hasta
cierto punto independiente de la naturaleza de la informaci ón procesada y pertenecerán en
su mayor parte al conjunto de métodos reunidos bajo el nombre de procesado digital de
señales. La salida de esta fase será una representación simbólica de la información. Tal
como se ha indicado anteriormente, una parte sustancial de la percepción es la constituida
por la interpretación de la información, que es el objetivo de la tercera fase. En esta fase, la
de mayor dificultad del proceso, es fundamental la aportación de la inteligencia artificial y
de las técnicas del reconocimiento de formas en su doble vertiente de decisión teórica y
sintáctico. Igualmente, los procedimientos heurísticos y las soluciones a medida juegan un
papel preeminente. El desarrollo de la fase de interpretación puede exigir, en algunos
casos, el retroceso a fases anteriores para adquirir nueva información o para aplicar otros
métodos de tratamiento que no habían sido considerados como necesarios anteriormente.
Esta vuelta atrás será en muchos casos orientada, en el sentido de que se desencadenarán
nuevamente fases previas con objetivos definidos y más restringidos que los iniciales. Por
Página 24 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
ejemplo, se puede demandar de la fase de adquisición una imagen de detalle, o de la fase
de tratamiento la búsqueda de una primitiva determinada o una cierta segmentación
dirigida. El resultado de la fase de interpretación será una descripción precisa y completa
del entorno de interés, con indicación de las características significativas de los objetos
presentes en él, de acuerdo con el tipo de percepción. Esta descripción, unida a otra
información relevante procedente de otros sistemas de percepción o de los bancos de datos
sobre planes de acción, permitir á a la unidad de control del robot seleccionar la actuación
más conveniente en cada caso.
I.6 Usos de los robots
En 1995 funcionaban unos 700.000 robots en el mundo industrializado. Más de
500.000 se empleaban en Japón, unos 120.000 en Europa Occidental y unos 60.000 en
Estados Unidos. Muchas aplicaciones de los robots corresponden a tareas peligrosas o
desagradables para los humanos. En los laboratorios médicos, los robots manejan
materiales que conlleven posibles riesgos, como muestras de sangre u orina. En otros
casos, los robots se emplean en tareas repetitivas y monótonas en las que el rendimiento
de una persona podr ía disminuir con el tiempo. Los robots pueden realizar estas
operaciones repetitivas de alta precisión durante 24 horas al día sin cansarse. Uno de los
principales usuarios de robots es la industria del automóvil. La empresa General Motors
utiliza aproximadamente 16.000 robots para trabajos como soldadura por puntos, pintura,
carga de máquinas, transferencia de piezas y montaje. El montaje es una de las
aplicaciones industriales de la robótica que más está creciendo. Exige una mayor precisión
que la soldadura o la pintura y emplea sistemas de sensores de bajo coste y
computadoras potentes y baratas. Los robots se usan por ejemplo en el montaje de
aparatos electrónicos, para montar microchips en placas de circuito.
Las actividades que entrañan gran peligro para las personas, como la localización
de barcos hundidos, la búsqueda de depósitos minerales submarinos o la exploración de
volcanes activos, son especialmente apropiadas para emplear robots. Los robots tambi én
Página 25 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

pueden explorar planetas distantes. La sonda espacial no tripulada Galileo, de la NASA,
viajó a Júpiter en 1996 y realizó tareas como la detección del contenido químico de la
atmósfera joviana.
Ya se emplean robots para ayudar a los cirujanos a instalar caderas artificiales, y
ciertos robots especializados de altísima precisión pueden ayudar en operaciones
quirúrgicas delicadas en los ojos. La investigación en telecirugía emplea robots
controlados de forma remota por cirujanos expertos; estos robots podrían algún día
efectuar operaciones en campos de batalla distantes.
II. LA ROBOTICA HOY EN DIA
II.1 Impacto de los robots
Los manipuladores robóticos crean productos manufacturados de mayor calidad y
menor coste. Sin embargo, también pueden provocar la pérdida de empleos no
cualificados, especialmente en cadenas de montaje industriales. Aunque crean trabajos en
los sectores de soporte lógico y desarrollo de sensores, en la instalación y mantenimiento
de robots y en la conversión de fábricas antiguas y el diseño de fábricas nuevas, estos
nuevos empleos exigen mayores niveles de capacidad y formación. Las sociedades
orientadas hacia la tecnología deben enfrentarse a la tarea de volver a formar a los
trabajadores que pierden su empleo debido a la automatización y enseñarles nuevas
capacidades para que puedan tener un puesto de trabajo en las industrias del siglo XXI.
II.2 Tecnologías del futuro
Las ventas anuales para robots industriales han ido creciendo en Estados Unidos a
razón de un 25% por año. Las ventas anteriores actuales y las estadísticas de instalaciones
están basadas en nuestras mejores estimaciones en el momento de escribir esta obra. Las
Página 26 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
previsiones de ventas presentan una tasa de crecimiento anual medio continuada del 25%
a través de 1987. En 1987 era previsible un incremento de la tasa de crecimiento en
Estados Unidos debido a varios factores. En primer lugar, había más personas en la
industria que tenían conocimiento de la tecnología y de su potencial para aplicaciones de
utilidad. En segundo lugar, la tecnología de la robótica mejorará en los próximos años de
manera que hará a los robots más amistosos con el usuario, más fáciles de interconectar
con otro hardware y más sencillos de instalar. En tercer lugar, a medida que crece el
mercado, son previsibles economías de escala en la producción de robots para proporcionar
una reducción en el precio unitario, lo que hará los proyectos de aplicaciones de robots más
fáciles de justificar. En cuarto lugar, se espera que el mercado de la robótica sufra una
expansión más allá de las grandes empresas, que ha sido el cliente tradicional para esta
tecnología, y llegue a las empresas de tamaño mediano y pequeño.
Esta circunstancia dará lugar a un notable incremento en la base de clientes para los
robots industriales. No puede determinarse si estos factores convergerán, en su totalidad,
en el año 1988 para crear un fuerte incremento repentino en la demanda. Sin embargo,
para los fines de la previsión, pensamos en 1988 como el año en que se incrementará la
tasa de crecimiento de las ventas, y empleamos un porcentaje del 40% como nuestra
estimación de esa nueva tasa de crecimiento. La base instalada representa la acumulación
de estas ventas anuales, ajustada teniendo en cuenta los robots obsoletos que se
desecharán. Creemos que es razonable suponer que los robots instalados se degradarán
quedarán tecnológicamente obsoletos después de una vida de servicio media de siete años.
Los avances en la tecnología y las reducciones en los precios harán a las nuevas unidades
relativamente atractivas en comparación con las antiguas unidades en servicio.
La robótica es una tecnología con un futuro y también es una tecnología para el
futuro. Si continúan las tendencias actuales, y si algunos de los estudios de investigación en
laboratorio actualmente en curso se convierten finalmente en una tecnología factible, los
robots del futuro serán unidades móviles con uno o más brazos, capacidades de sensores
múltiples y con la misma potencia de procesamiento de datos y de cálculo que las grandes
Página 27 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

computadoras actuales. Serán capaces de responder a ordenes dadas con voz humana.
Asimismo serán capaces de recibir instrucciones generales y traducirlas, utilizando
inteligencia artificial, en un conjunto específico de acciones requeridas para llevarlas a cabo.
Podrán ver, oír, palpar, aplicar una fuerza media con precisión a un objeto y desplazarse
por sus propios medios. En resumen, los futuros robots tendrán muchos de los atributos de
los seres humanos. Es difícil imaginar que los robots llegarán a sustituir a los seres
humanos en el sentido de la obra de Karel Capek Robots Universales de Rossum. Por el
contrario, la robótica es una tecnología que sólo puede destinarse al beneficio de la
humanidad. Sin embargo, como otras tecnologías, hay peligros potenciales implicados y
deben establecerse salvaguardas para impedir su uso pernicioso. El paso del presente al
futuro exigirá mucho trabajo de ingeniería , ingeniería electr ónica, informática, ingeniería
industrial, tecnología de materiales, ingeniería de sistemas de fabricación y ciencias
sociales. La finalidad de esta obra es explorar y examinar estar áreas, que constituyen la
tecnología, la y la de la robótica industrial.
Las máquinas automatizadas ayudarán cada vez más a los humanos en la
fabricación de nuevos productos, el mantenimiento de las infraestructuras y el cuidado de
hogares y empresas. Los robots podrán fabricar nuevas autopistas, construir estructuras
de acero para edificios, limpiar conducciones subterráneas o cortar el césped. Ya existen
prototipos que realizan todas esas tareas.
Una tendencia importante es el desarrollo de sistemas microelectromecánicos,
cuyo tamaño va desde centímetros hasta milímetros. Estos robots minúsculos podrían
emplearse para avanzar por vasos sanguíneos con el fin de suministrar medicamentos o
eliminar bloqueos arteriales. También podrían trabajar en el interior de grandes máquinas
para diagnosticar con antelación posibles problemas mecánicos.
Puede que los cambios más espectaculares en los robots del futuro provengan de
su capacidad de razonamiento cada vez mayor. El campo de la inteligencia artificial está
pasando rápidamente de los laboratorios universitarios a la aplicación práctica en la
Página 28 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

industria, y se están desarrollando máquinas capaces de realizar tareas cognitivas como
la planificación estratégica o el aprendizaje por experiencia. El diagnóstico de fallos en
aviones o satélites, el mando en un campo de batalla o el control de grandes fábricas
correrán cada vez más a cargo de ordenadores inteligentes.
II.3 La Tecnología cambia nuestras vidas...¿Para bien o para mal?
Era un pueblo de México, en esos a los que llego el agua corriente por los años 70.
Con el lkiquido vital aflorando directamente de sus casas, los habitantes dejaron de acudir a
la fuente del lugar. Conforme los hogares se llenaban de lavadoras, regaderas y piletas, la
vida experimento una sorprendente transformación. El lavadero y la fuente publica, antaño
agitados puntos de reuni ón, comenzaron a desplobarse; los hombres perdieron el contacto
con los niños y animales que les ayudaban a transportar el agua, las mujeres dejaron de
congregarse a la hora de lavar ropa y de organizar sus conversaciones a pie de río la vida
política, económica y social del pueblo. Sin saberlo, la lejanía del agua era para ellos una
especie de catalizador comunitario que, con la comodidad de las nuevas tecnologías,
desapareció.
Es el signo de los tiempos. En esta mitad de siglo hemos experimentado de manera
inconsciente constantes avances tecnológicos aparentemente inocuos. En la mayoría de los
casos nos alegramos espontáneamente de ello: tenemos mas luz, vivimos mas de prisa,
sentimos mas seguros, morimos mas tarde... ¿Pero hemos elegido nosotros estos cambios?
¿Sirven para hacer un mundo mejor? Somos conscientes de sus efectos secundarios?
II.3.1 Optimistas y pesimistas
Los tecnooptimistas no dudan en contestar que si. Hoy, aseguran, tenemos mas
Página 29 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

control que nunca sobre nuestras vidas, nuestras mentes, nuestros cuerpos y hasta
nuestros genes. Las nuevas tecnologías hacen el trabajo duro mas fácil, concentran
nuestros esfuerzos en nosotros mismos y en nuestro bienestar, permiten que accedamos a
cantidades de información antes impensables, nos acercan a lugares remotos, dificultan la
tarea de control de los tiranos, aumentan la libertad individual... No esta mal.
Frente a ellos, el tecnopesimismo al uso no deja de llamarnos a la reflexión con
imágenes de adictos a Internet, hombres y mujeres desarraigados, solitarios televidentes,
trabajadores reemplazados por maquinas, niños hiperactivos por culpa de videojuegos...
Para saber cual de los dos bandos tiene la razón (si es que alguno la tiene) debemos
de conocer hasta que punto las nuevas tecnologías han cambiado nuestras vidas. Sin duda,
la actividad cotidiana es hoy mas automatizada que nunca. Y si hay un ambiente en el que
la mecanización prevalece es el laboral. Como explica Antonio López Pelaez, profesor de
sociología, “en los últimos días la tendencia a la automatización es cada vez mayor en todas
las áreas de la economía productiva. Tanto en los periodos de recesión como en momentos
de expansión económica, el aumento del parque de robots y maquinas automatizadas no se
detiene: se incrementa en la industria y se expande en los sectores de servicio ”
El pasado mes de julio, el Papa advertía que las nuevas tecnologías están haciendo
al hombre un ser cada vez mas solitario y denunciaba un irreversible proceso de la
valoración de las maquinas solo por su productividad económica y no por su valor humano.
Lo cierto es que no es el único que ha puesto su atención en los posibles efectos negativos
de la tecnificacion. Ya entre los poetas románticos del siglo XIX circulaba la idea de que las
maquinas podrían alienar la mente humana. Ahora que ese espectro parece haber
desaparecido, los críticos de la tecnología se quejan del efecto contrario: las maquinas
generan demasiados espacios de libertad. Así, según creen, los valores tradicionales se
diluyen con el uso de las tecnologías digitales, el individualismo gana terreno al altruismo y
Página 30 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

la sociedad sin fronteras se convierte en un territorio sin ley.
II.3.2 Los robots se multiplican
El mercado mundial de robots industriales alcanzo en 1996 una cifra récord al
instalarse 80 500 nuevas unidades. El precio de cada una de ellas es hoy de unos 9
de dólares, mientras que en 1991 era de mas de 12. ¿Que supone esto?
“En la actualidad -comenta Antonio López- las nuevas tecnologías han provocado un
cambio en el perfil de los trabajadores y han generado otras formas de gestión. Se aprecia
por ejemplo, un descenso constante en el numero de empleados en aquellas empresas que
invierten de forma masiva en la automatizaci ón”.
¿Esto significa que la nueva tecnología destruye el empleo? Para los tecnooptimistas,
no. El autentico efecto de la automatización es que permite a los trabajadores concentrarse
en tareas menos tediosas. El analista de The New York Times John Tierney lo explicaba
recientemente así: “los obreros de hoy son mas cultos, mas ricos y están mas integrados
socialmente que los del siglo pasado. Las maquinas han sacado a los seres humanos de las
cadenas de montaje o de los telares para convertirlos en escritores, maestros, agentes de
seguros o restauradores de museo”.
López va todavía mucho mas allá: “Se prevé una modificación radical de la sociedad
a causa de la automatización. La nueva economía se desligara de la productividad del
trabajo humano, lo cual implica la modificación de las formas tradicionales de distribución
de la riqueza, basadas en el salario. Pero además se reformaran el ocio y las relaciones
humanas en función del aumento de tiempo libre ”.
Algunos expertos opinan que esta tendencia de acelerar las cosas aleja cada vez
mas a las maquinas de sus objetivos iniciales. La tecnología, según los tenooptimistas
Página 31 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Hipótesis
Actualmente existe una infinidad de robots y aplicaciones dentro de la industria y la
sociedad. Pero en este punto es donde deseamos hacer énfasis. La tecnología nos ha
brindado grandes aportaciones para la humanidad, y una de esas aportaciones es la
Página 32 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
robótica.
Esta rama tecnológica es de gran utilidad; ya que por su aportación es capaz de
realizar una tarea o función que el ser humano no es capaz de realizar, por diferentes
causas o motivos, pero esto provoca un costo que se refleja en la sociedad.
La robótica en sus inicios, principalmente en la industria, desplazo a grandes
multitudes de obreros, quedando estos últimos sin empleo. Por otra parte, estos magníficos
inventos han beneficiado de gran forma a la humanidad con robots que trabajan las 24 hrs
al día, produciendo en grandes volúmenes, etc.
“Los avances tecnológicos en el campo de la robótica
benefician de gran forma a la humanidad,
pero también la perjudican en cierto grado”
Conclusión
Con el estudio y preparación de cada individuo conforme a sus máximas
posibilidades se podría solucionar tan grave problema de la gente que tiene pocas
posibilidades de hacer uso de tan genial herramienta o que se ha visto desplazada en sus
Página 33 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

empleos por la automatizaci ón de las industrias. De la insistencia por parte de científicos y
principalmente de los ingenieros por desarrollar mas esta área tecnológica surge el
problema ya mencionado.
Y es a causa de las necesidades que la ciencia y la tecnología no se estanca; por eso
es necesario erradicar todo tipo de problemas para que sin excepción todos podamos gozar
de los beneficios de la robótica.
Este es el fin, que en un futuro nosotros como ingenieros encontremos la solución
del problema y no haya perjudicados, pues en la actualidad existen y seguirá existiendo
mas y mejores tecnologías que se fabricaran con el propósito de beneficiar a la humanidad
y no de perjudicarla.
Glosario
Antropomórfica: de Antropomorfismo, atribución de forma o de cualidades humanas a lo
que no es humano.
Controlador: en informática, dispositi vo de hardware o un programa que controla o
regula otro dispositivo. Por ejemplo, un controlador de l ínea amplifica las señales
Página 34 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
transmitidas a través de una línea de comunicaciones, mientras que un controlador de bus
amplifica y regula las señales transmitidas a través de la ruta o trayectoria de datos
Un controlador de dispositivo es un programa de control específico de dispositivo que
permite a una computadora trabajar con un determinado dispositivo como, por ejemplo,
una impresora o una unidad de disco.
Humanoide: dicese que tiene forma humana
Robot:, máquina controlada por ordenador y programada para moverse, manipular objetos
y realizar trabajos a la vez que interacciona con su entorno
Tecnooptimista: Persona, que según sus ideales, piensa que la tecnolog ía favorece al
hombre.
Tecnopesimista: Persona, que según sus ideales, piensa que la tecnología perjudica al
hombre.
Bibliografía
G. FERRATÉ.
Robótica industrial.
España,1era edición, Ed. Marombo S.A., 1986.
GROVER, Mikell P.
Página 35 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

Robótica Industrial. Tecnologia, aplicaciones y programación
España, 1era edición, Ed. McGrawHill S.A., 1989
K. S., Fu
Robótica, Control, detección, visión e inteligencia
Editorial Mc Graw-Hill
Enciclopedia Encarta 98
Muy Interesante
Año XVI, No. 1
Enero de 1999
Anexos
Página 36 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm

lafacu.com no se responsabiliza por el uso que otros o terceros, puedan darle a esta información.
Página 37 de 37Robotica Industrial
22-10-2003http://www.lafacu.com/apuntes/ingenieria/Robotica_industrial/default.htm
Top Related