





Idiomas
Páginas
Jurídico


Autor: Gonzalez Leonardo C.I. 22.509.393
Urb. Yuma II, Calle Nº 3, Municipio San Diego
Teléfono: (0241) 8714240 (Master) - Fax: (0241) 871239
DISEÑO DE UN ASISTENTE
DE MANIPULACIÓN PARA EL
MONTAJE DE ESTRIBOS DE
CAMIONES CARGO 816 EN LA
ENSAMBLADORA DE VEHICULOS
FORD MOTOR DE VENEZUELA S.A.

REPÚBLICA BOLIVARIANA DE VENEZUELA UNIVERSIDAD JOSÉ ANTONIO PÁEZ
FACULTAD DE INGENIERÍA ESCUELA DE MECÁNICA
DISEÑO DE UN ASISTENTE DE MANIPULACIÓN PARA EL MONT AJE
DE ESTRIBOS DE CAMIONES CARGO 816 EN LA ENSAMBLADOR A DE
VEHICULOS FORD MOTOR DE VENEZUELA S.A.
Trabajo de grado presentado como requisito para optar al título de
INGENIERO MECÁNICO
EMPRESA: Ford Motor de Venezuela S.A,
Autor : Gonzalez D. Leonardo J. C.I. 22.509.393
Tutor : Ing. Pizzella P. Giovanni San Diego, Junio del 2015.

REPÚBLICA BOLIVARIANA DE VENEZUELA UNIVERSIDAD JOSÉ ANTONIO PÁEZ
FACULTAD DE INGENIERÍA ESCUELA DE MECÁNICA
DISEÑO DE UN ASISTENTE DE MANIPULACIÓN PARA EL MONT AJE
DE ESTRIBOS DE CAMIONES CARGO 816 EN LA ENSAMBLADOR A DE
VEHICULOS FORD MOTOR DE VENEZUELA S.A.
CONSTANCIA DE ACEPTACIÓN
Ing. Pizzella P. Giovanni C.I.: V- 4.455.859 Tutor Académico
Ing. León H. José C.I.: V- 16.786.404 Tutor Empresarial
Autor : González D. Leonardo J.
C.I. 22.509.393 San Diego, Junio del 2015.

REPÚBLICA BOLIVARIANA DE VENEZUELA UNIVERSIDAD JOSÉ ANTONIO PÁEZ
FACULTAD DE INGENIERÍA ESCUELA DE MECÁNICA
ACEPTACIÓN DEL TUTOR
Quien suscribe, Ingeniero Giovanni Pizzella portador de la cédula de identidad N°
4.455.859, en mi carácter de tutor del trabajo de grado presentado por el ciudadano,
Leonardo Gonzalez portador de la cédula de identidad N° V-22.509.393, titulado
DISEÑO DE UN ASISTENTE DE MANIPULACIÓN PARA EL MONT AJE
DE ESTRIBOS DE CAMIONES CARGO 816 EN LA ENSAMBLADOR A DE
VEHICULOS FORD MOTOR DE VENEZUELA S.A. Presentado como requisito
parcial para optar al título de Ingeniero, considero que dicho trabajo reúne los
requisitos y méritos suficientes para ser sometido a la presentación pública y
evaluación por parte del jurado examinador que se designe.
En San Diego, mes de Junio del año dos mil quince. .
___________________________
Ing. Giovanni Pizzella C.I.: 4.455.859

AGRADECIMIENTOS
Primeramente a Dios, por darme la oportunidad de seguir superándome
integralmente como persona.
A mis padres José Gonzalez y Zuleima Damas, por apoyarme en todo momento.
A mi hermana Zuleidy Gonzalez, por toda su ayuda y apoyo.
A mi tutor académico Giovanni Pizzella, por ser un excelente profesor, por su
ayuda y por guiarme en la realización de este proyecto.
A mi tutor empresarial José León, por darme la oportunidad de realizar mis
pasantías en la empresa Ford Motor de Venezuela S.A.
A mis compañeros de labores en la empresa Ford Motor de Venezuela S.A.;
Argenis Ceballos, José León, Walner Fuenmayor, Gabriel Kanahan, Néstor
Polo, Emeterio Morle, Joel Torres, Octavio Figueredo, Carlos Peña, Elsy
Contreras y Nelcis Arrieche, por ayudarme, aconsejarme y apoyarme a lo largo de
mis pasantías en la empresa.
A todos mis compañeros de la Universidad José Antonio Páez.
Y a todas aquellas personas que de una u otra forma sirvieron de apoyo y ayuda
en mi carrera como estudiante.

DEDICATORIA
A Nuestro Padre Dios Todopoderoso.
A mi Madre Zuleima, fuente inagotable de amor, cariño y sabiduría.
A mi Padre José, con tu fuerza inquebrantable y voluntad de acero me enseñas el
camino correcto. Pilar fundamental y modelo excepcional te dedico este logro; que es
incluso más tuyo que mío
A mis hermana Zuleidy, por apoyarme en todo momento.

vii
ÍNDICE GENERAL.
CONTENIDO pp.
LISTA DE FIGURAS……………..………………………...…………………….. xi
LISTA DE TABLAS……………..………………….………….………………….xi
RESUMEN……………………………………………………………………...….xiv
INTRODUCCION………………………………………………...……..…………..1
CAPÍTULO I ............................................................................................................... 4
LA EMPRESA ............................................................................................................. 4
1.1 Descripción de la empresa ...................................................................................... 4
1.2 Reseña Histórica...................................................................................................... 4
1.3 Mercado................................................................................................................... 7
1.4 Misión ..................................................................................................................... 8
1.5 Visión ...................................................................................................................... 8
1.6 Objetivos ................................................................................................................. 8
1.7 Valores .................................................................................................................... 9
1.8 Políticas ................................................................................................................... 9
1.9 Estructura organizacional de la empresa ............................................................... 12
1.10 Descripción del departamento ............................................................................. 12
1.11 Misión del Departamento Vehicule Operation Manufacturing Engineer (VOME)
..................................................................................................................................... 13
1.12 Estructura organizacional del departamento ....................................................... 13
1.13 Actividades a desarrollar durante el periodo de pasantías .................................. 14
CAPÍTULO II ........................................................................................................... 16
EL PROBLEMA ....................................................................................................... 16

viii
2.1 Planteamiento del Problema .................................................................................. 16
2.2 Formulación del Problema .................................................................................... 19
2.3 Objetivo General ................................................................................................... 19
2.4 Objetivos Específico ............................................................................................. 19
2.5 Justificación de la Investigación ........................................................................... 20
2.6 Alcance .................................................................................................................. 20
2.7 Limitaciones .......................................................................................................... 21
CAPÍTULO III .......................................................................................................... 22
MARCO REFERENCIAL CONCEPTUAL .......................................................... 22
3.1 Antecedentes ......................................................................................................... 22
3.2 Bases Teóricas ....................................................................................................... 26
3.2.1 Camiones ........................................................................................................ 26
3.2.2 Estribos de vehículos ..................................................................................... 28
3.2.3 Manipuladores de carga neumáticos .............................................................. 29
3.3.3 Estructura de los manipuladores .................................................................... 29
3.3.4 Tipos de articulaciones ................................................................................... 30
3.3.5 Coordenadas de los movimientos................................................................... 32
3.3.5.1 Configuración cartesiana ......................................................................... 32
3.3.5.2 Configuración Cilíndrica ......................................................................... 33
3.3.5.3 Configuración polar ................................................................................ 33
3.3.5.4 Configuración angular ............................................................................. 34
3.3.6 Neumática ...................................................................................................... 34
3.3.6.1 Generación de aire comprimido .......................................................... 35
3.3.6.2 Actuadores............................................................................................... 37
3.3.6.3 Accesorios para actuadores neumáticos .................................................. 39
3.3.6.4 Control del aire comprimido ............................................................... 40
3.3.7 Balancín neumático ........................................................................................ 44

ix
3.3.7.1 Principio de funcionamiento ............................................................... 45
3.3.7.2 Equilibrio de carga .............................................................................. 46
3.3.8 Esquemas neumáticos .................................................................................... 47
3.3.9 Consideraciones de diseño ............................................................................. 48
3.3.9.1 Factores de diseño. .................................................................................. 48
3.3.9.2 Normas y códigos .................................................................................... 49
3.3.9.3 Factor de Seguridad................................................................................. 51
3.3.9.4 Esfuerzos ................................................................................................. 52
3.3.9.5 Análisis de piezas largas sometidas a compresión. ................................. 63
3.3.10 Soldadura a tope. .......................................................................................... 69
3.3.11 Centro de gravedad y centroide............................................................... 71
CAPÍTULO IV .......................................................................................................... 75
FASES METODOLOGICA ..................................................................................... 75
CAPÍTULO V ............................................................................................................ 78
RESULTADOS .......................................................................................................... 78
5.1 Diagnóstico de la situación actual en la estación de montaje de estribos de
camiones cargo 816 en la empresa Ford Motor de Venezuela S.A. ........................... 78
5.2 Revisar las posibles variables a modificar en la estación de montaje de estribos de
camiones cargo 816 en la empresa Ford Motor de Venezuela S.A. ........................... 80
5.2.1 Criterios para el diseño de posibles soluciones .............................................. 81
5.2.1.1 Constantes en el proceso ......................................................................... 81
5.2.1.2 Función principal de la solución ............................................................. 82
5.2.2 Propuestas de soluciones ................................................................................ 82
5.2.2.1 Propuestas de soluciones para el montaje de estribos en los camiones
cargo 816 ............................................................................................................. 82
5.2.3 Criterios de evaluación y escogencia de la propuesta .................................... 88

x
5.2.3.1 Lista de criterios y restricciones para base de sensores. ......................... 88
5.3 Diseño de un asistente de manipulación para el montaje de estribos en los
camiones cargos 816 que cumpla con los estándares de ergonomía y seguridad ....... 93
5.3.1 Selección del actuador neumático .................................................................. 94
5.3.2 Red de control neumático............................................................................. 103
5.3.4 Análisis mecánico de los elementos estructurales del asistente de
manipulación de estribos. ...................................................................................... 107
5.4 Factibilidad técnica y económica del Proyecto Propuesto .................................. 123
5.4.1 Factibilidad técnica ...................................................................................... 123
5.4.2 Factibilidad económica ................................................................................ 124
CONCLUSIONES ................................................................................................... 127
RECOMENDACIONES ......................................................................................... 129
BIBLIOGRAFÍA ..................................................................................................... 130
APÉNDICE A .......................................................................................................... 134
APÉNDICE B .......................................................................................................... 135
APÉNDICE C .......................................................................................................... 136
APÉNDICE D .......................................................................................................... 137
APÉNDICE E .......................................................................................................... 138
APÉNDICE F .......................................................................................................... 130
APÉNDICE G .......................................................................................................... 131
ANEXO A ................................................................................................................ 143
ANEXO B ................................................................................................................ 134

xi
LISTADO DE FIGURAS
CONTENIDO
FIGURA Pp.
Figura 1. Estructura organizativa de Ford Motor de Venezuela ................................ 12
Figura 2. Estructura organizativa del departamento de manufactura......................... 14
Figura 3. Camión plataforma Cargo 1721 ................................................................. 27
Figura 4. Camión de caja abierta Cargo 816 .............................................................. 27
Figura 5. Camión caja cerrada Midlum 220 .............................................................. 28
Figura 6. Camión isotermo ........................................................................................ 28
Figura 7. Estribo de cargo 816 ................................................................................... 28
Figura 8. Cadena cinemática abierta .......................................................................... 30
Figura 9. Tipos de articulaciones ............................................................................... 31
Figura 10. Configuración Cartesiana ......................................................................... 32
Figura 11. Configuración cilíndrica ........................................................................... 33
Figura 12. Configuración polar .................................................................................. 34
Figura 13. Configuración angular .............................................................................. 34
Figura 14. Ilustración del proceso de compresión en compresor de pistón con
ejecución de válvulas de disco de acero inoxidable .................................................... 36
Figura 15. Esquema de un moderno compresor centrífugo de alta velocidad con
accionamiento directo ................................................................................................. 37
Figura 16. Corte de una válvula 5/2 vías de accionamiento neumático ..................... 41
Figura 17. Simbología de las posiciones de una válvula neumática .......................... 41
Figura 18. Simbología de las vías de una válvula neumática .................................... 41

xii
Figura 19. Simbología de apertura y cierre para una válvula .................................... 42
Figura 20. Simbología de las diferentes válvulas neumáticas ................................... 43
Figura 21. Simbología de los diferentes tipos de accionamientos de una válvula ..... 44
Figura 22. Balancín neumático .................................................................................. 45
Figura 23. Partes de un balancín neumático .............................................................. 46
Figura 24. Equilibrio de carga en un balancín neumático.......................................... 47
Figura 25. Codificación de elementos y equipos en un esquema neumático ............. 48
Figura 26. (a) Paralelepípedo sometido a un momento flector MF puro; (b)
paralelepípedo afectado por el momento flector y (c) ampliación de un corte en el
medio del paralelepípedo ............................................................................................ 54
Figura 27. Eje o árbol sometido a la acción de tensiones de corte, de compresión y de
tracción simultáneamente. ........................................................................................... 56
Figura 28. Volumen Elemental de una pieza cualquiera, sometida a un estado
bidimensional de tensiones, (b) análisis de cuerpo libre del mismo Volumen
Elemental..................................................................................................................... 58
Figura 29. Diagrama del círculo de Mohr .................................................................. 59
Figura 30. Construcción del Círculo de Mohr “resultante”, para un elemento de
máquina sometido a un estado tridimensional de tensiones........................................ 60
Figura 31. Elementos de Máquina de igual sección transversal, e idénticos sistemas
de carga; difieren únicamente en cuanto a las correspondientes longitudes. .............. 64
Figura 32. Representación de un elemento de máquina largo, con un extremo libre de
girar, y el otro guiado, sometido a compresión, o ambos libres de girar sometido a una
carga axial F de compresión (la deformación del elemento ha sido magnificada). .... 65
Figura 33. Elemento de Máquina, con un extremo empotrado y el otro libre,
sometido a una carga axial F de compresión. ............................................................. 66
Figura 34. Representación de elementos de máquina largos, sometidos a la carga
axial de compresión de compresión F; (a) elemento con ambos extremos
empotrados; (b) elemento con un extremo empotrado y el otro guiado. .................... 67

xiii
Figura 35. Representación gráfica de los criterios de Euler y de Johnson ................. 69
Figura 36. Soldaduras a Tope, sometidas a tracción o compresión: (a) tope con
extremos rectos; (b) bisel a 60º; (c) doble bisel a 60º; (d) bisel simple a 45º. ............ 70
Figura 37. Soldadura a tope, de dos láminas de distinto espesor, sometidas a tracción
(ESP. >Esp.) ................................................................................................................ 71
Figura 38. Centro de masa ......................................................................................... 72
Figura 39. Centroide .................................................................................................. 74
Figura 40. (a) Estribos Izquierdo Montado en el rack; (b) Estribos Derecho Montado
en el rack. .................................................................................................................... 79
Figura 41. (a) Momento en que los operarios han recogido el estribo del rack y se
preparan a montarlo; (b) Momento en que los operarios empiezan a cuadrar el estribó
para su posterior ajuste ................................................................................................ 80
Figura 42. (a) Momento en que los operarios se encuentran colocando los pernos
para su posterior ajuste; (b) Momento en que los operarios empiezan a ajustar los
pernos con una pistola neumática ............................................................................... 80
Figura 43. Estribo izquierdo de camión cargo 816. ................................................... 81
Figura 44. Secuencia de la propuesta 1 ...................................................................... 83
Figura 45. Asistente de manipulación de estribo de camiones cargo 816 (PS2) ....... 84
Figura 46. Agarre del estribo por la PS2 .................................................................... 85
Figura 47. Asistente de manipulación de estribo de camiones cargo 816 (PS3) ....... 86
Figura 48. Agarre del estribo por la PS3 .................................................................... 87
Figura 49. Diagrama de cuerpo libre de las pinzas sujetando el peso ....................... 96
Figura 50. Búsqueda de los posibles actuadores neumáticos en la matriz de
inventario de almacén ................................................................................................. 98
Figura 51. Punto de agarre ......................................................................................... 99
Figura 52. Diagrama de flujo para el montaje de estribo en los camiones cargo 816.
................................................................................................................................... 104

xiv
Figura 53. Diagrama de movimiento para la pinza neumático MHL2-40D, balancín
neumático KBC150-070............................................................................................ 105
Figura 54. Control y accionamiento neumático del manipulador de estribos de
camiones cargo 816 ................................................................................................... 106
Figura 55. Diagrama de cuerpo libre de la estructura del manipulador de estribos . 108
Figura 56. Diagrama de cuerpo libre de las ruedas del trolley ................................ 109
Figura 57. Fuerzas aplicada a la estructura del asistente de manipulación de estribos
................................................................................................................................... 112
Figura 58. Interacción de los esfuerzo en la sección transversal de la estructura .... 115
Figura 59. Calculo del esfuerzo de corte resultante ................................................. 116
Figura 60. Simulación de fuerzas aplicada a la estructura principal del manipulador.
................................................................................................................................... 117
Figura 61. Análisis de fuerzas y obtención de factor de seguridad, realizado mediante
el software Autodesk Inventor 2014 ......................................................................... 118
Figura 62. Manubrio del asistente de manipulación de estribo................................ 119
Figura 63. Barra 1 del Manubrio .............................................................................. 119
Figura 64. Barra 2 del manubrio .............................................................................. 121
Figura 65. Soldadura en tubos circulares. ................................................................ 123

xv
LISTADO DE TABLAS
CONTENIDO
TABLA
Pp.
Tabla 1: Factores de Seguridad .................................................................................. 52
Tabla 2: Aplicación de restricciones .......................................................................... 89
Tabla 3: Ponderación de criterios .............................................................................. 89
Tabla 4: Ponderación de soluciones con respecto a criterio C1 ................................. 90
Tabla 5: Ponderación de soluciones con respecto a criterio C2 ................................. 90
Tabla 6: Ponderación de soluciones con respecto a criterio C3 ................................. 91
Tabla 7: Ponderación de soluciones con respecto a criterio C4 ................................. 91
Tabla 8: Ponderación de soluciones con respecto a criterio C5 ................................. 91
Tabla 9: Ponderación de soluciones con respecto a criterio C6 ................................. 91
Tabla 10: Ponderación de soluciones con respecto a criterio C7 ............................... 92
Tabla 11: Ponderación de soluciones con respecto a criterio C8 ............................... 92
Tabla 12: Ponderación final de criterios .................................................................... 93
Tabla 13: Información en el almacén del actuador neumático. ................................. 98

xvi
REPÚBLICA BOLIVARIANA DE VENEZUELA UNIVERSIDAD JOSÉ ANTONIO PÁEZ
FACULTAD DE INGENIERÍA ESCUELA DE INGENIERÍA MECÁNICA
DISEÑO DE UN ASISTENTE DE MANIPULACIÓN PARA EL MONT AJE
DE ESTRIBOS DE CAMIONES CARGO 816 EN LA ENSAMBLADOR A DE
VEHICULOS FORD MOTOR DE VENEZUELA
Autor : Leonardo González
Tutor : Ing. Giovanni Pizzella
Fecha: Junio, 2015
RESUMEN
El presente informe se enfoca en el diseño de un asistente de manipulación para el montaje de estribos de camiones cargo 816 que se adapte a los estándares de ergonomía y seguridad en la ensambladora de vehículos Ford Motors de Venezuela con la finalidad de reducir el riesgo de lesiones en los trabajadores. Metodológicamente es un tipo de proyecto factible donde se desarrolló una propuesta para solucionar un problema en la empresa. Se diseñan, calculan y seleccionan los diferentes elementos que intervienen en el funcionamiento del manipulador.
Descriptores: Diseño, Investigación, Manipuladores neumáticos, estribos.

INTRODUCCIÓN
Ford Motor Venezuela es una empresa ensambladora de vehículos automotores, en
la cual son ensamblados modelos de Carros, Camionetas, Pick-Ups y Camiones tales
como el Fiestas, Ecosport, Explorer, F-250, F-250; Doble Cabina, F-350, Cargo 815 y
Cargo 1721. Debido a la continua integración de nuevos vehículos al mercado
suscitan contrariedades que afectan la política de seguridad y salud de la
ensambladora de vehículos. Tales efectos, se deben a que cada día existen procesos
de mayor magnitud y exigencia que perturban de manera significativa la planta.
Dentro de la línea final de camiones, se ha presentado una situación en el montaje de
los estribos a los nuevos modelos de los camiones cargo 816 debido al enorme peso y
su gran tamaño, siendo esto el motivo para el desarrollo de este proyecto de
investigación. Para el desarrollo de la investigación se obtendrá la información
directamente de la organización, datos de vital importancia para el éxito en la toma de
decisiones, que permitirá el cumplimento de los objetivos organizacionales de la
empresa, repercutiendo esto en el crecimiento tanto de la misma como del talento
humano que la conforma.
Este trabajo está conformado de la manera siguiente:
Capítulo I: La Empresa. Se describe la empresa indicando su reseña histórica, su
estructura organizacional, las actividades económicas, el mercado, así como también
su misión, visión, objetivos, valores y políticas.
Capítulo II: El Problema. Se expone con claridad la identificación del
planteamiento, formulación, objetivos generales y específicos del problema, así como
su justificación, alcance y limitaciones del estudio.

Capítulo III: Marco Referencial Conceptual. Se expone los antecedentes, bases
teóricas y legales.

2
Capítulo IV: Fases metodológicas. En él se justifica la metodología empleada por la
investigación, también se definen las técnicas básicas de recolección de datos
aplicados para la realización de este informe y se hace un preámbulo de las fases de la
investigación.
Capítulo V: Resultados. Se exponen una serie de soluciones propuestas, se presenta
la metodología realizada para elegir la mejor de ellas y se muestran los resultados que
se obtuvieron a lo largo de la realización de este proyecto.

3

4
CAPÍTULO I
LA EMPRESA
1.1 Descripción de la empresa
Ford Motor Company es una empresa global ensambladora de vehículos
automotores. Cuenta con plantas de fabricación de automóviles en Estados Unidos,
Argentina, Australia, Brasil, Canadá, México, Sudáfrica, Taiwán, Unión Europea y
Venezuela, y está asociada con las siguientes compañías automotrices: Mazda, de
Japón; Kia, de Corea; Aston Martin y Jaguar, ambas de Gran Bretaña.
La Planta Ford Motors de Venezuela S.A., Se encuentra ubicada en la Zona
Industrial Sur de Valencia, Av. Henry Ford del Estado Carabobo, Venezuela. Ocupa
una superficie de 416.234m2 con una capacidad instalada de 300 vehículos por día, en
un solo turno de producción; para ello, la empresa cuenta con más de 2000
trabajadores.
Actualmente son ensamblados en esta planta modelos de Carros, Camionetas,
Pick-Ups y Camiones tales como el Fiestas, Ecosport, Explorer, F-250, F-250, Doble
Cabina; F-350, Cargo 815 y Cargo 1721, utilizando para su elaboración materia
prima de alta calidad y sometidos a constantes y rigurosos procesos de verificación de
calidad; todo esto sumado a un sistema de higiene, ergonomía, ambiente y seguridad,
garantizando así la excelencia de sus productos en el mercado nacional.
1.2 Reseña Histórica
Ford Motor Company nace el 16 de junio de 1903, cuando Henry Ford y once
socios suscribieron la empresa con un capital de apenas 28 mil dólares. Hoy, casi
Centenaria, reporta ventas por el orden de los 128,4 millardos de dólares. Ford es
quizá la empresa Norteamericana cuyo símbolo es el más fácil de reconocer. De

5
hecho, es la segunda corporación industrial del mundo y los autos y camiones con el
óvalo se venden en 200 países y territorios, acumulando el 13% del mercado global.

6
Entre los primeros modelos desarrollados por Ford, uno de los más memorables es
el Modelo T, que nació en 1908 y comenzó a venderse en Venezuela en 1911. Su
evolución de 19 años, durante los cuales se vendieron más de 15 millones de
unidades, simboliza el desarrollo de la joven compañía que había iniciado una
revolución urbana con sus vehículos, así como otra revolución industrial al incorporar
la línea de ensamblaje al proceso de producción.
Entre los años de 1920 y 1930 Ford incrementa la capacidad de producción y lanza
el Modelo A, con variedad de carrocerías y colores; Pero su mayor éxito, en los años
prebélicos (1932), fue el vaciado de un motor V-8 en una sola pieza. Lo que los
expertos consideraban en imposible y que a la competencia tomó años en igualar, se
convirtió en una confiable realidad para quienes se deleitaban con la performance de
un vehículo.
En la Segunda Guerra Mundial también demostró los recursos industriales de
Ford. En menos de tres años, su contribución al esfuerzo bélico Norteamericano se
materializó en 8.600 bombarderos B-24, 57.000 motores para aviones, más de
250.000 jeeps, tanques, destructores de tanques y otras piezas de máquinas de guerra.
Finalizada la contienda, la empresa se embarcó en un proceso de reestructuración y
expansión, cuyos frutos más notables fueron el lanzamiento del Thunderbird en 1954
y del Mustang en 1964, así como el establecimiento de nuevas plantas de fabricación
de piezas y de ensamblaje fuera de los Estados Unidos. Es así como el 27 de octubre
de 1962 se inauguró la Planta de Ensamblaje de Ford Motor de Venezuela, en la Zona
Industrial de Valencia. Fue la culminación de una relación que llevaba más de medio
siglo, a través de una red de distribuidores que importaba autos y camiones desde los
Estados Unidos y los vendía en todo el territorio nacional. El primer carro que salió
de la línea de montaje fue un Ford Falcón.

7
En 1995, la planta de Valencia conquistó la distinción Q-1, con la que Ford
certifica que sus operaciones cumplen con los mismos requisitos de seguridad,
calidad, prontitud y respeto al ambiente exigidos en las mejores plantas del mundo.
Otra validación, de acuerdo con normativas independientes de aceptación universal,
ocurrió en 1996 con el otorgamiento de la Certificación Covenin-ISO 9002 y ha sido
re-certificada por ISO14000 por la protección al medio ambiente.
El reconocimiento de esa calidad por parte del consumidor le ha concedido a Ford
el segundo lugar en ventas en Venezuela. Sus autos y camiones llegan al consumidor
a través de su red de 63 concesionarios, con total respaldo de servicio y repuestos.
1.3 Mercado
Como fue indicado anteriormente la planta actualmente se divide en cuatro
grandes ramos de producción que son: Carros, Camionetas, Pick-Ups y Camiones; de
los cuales se deriva los siguientes portafolios de productos para el mercado de
consumidores:
Carros
- Fiesta: SE, Titanium.
- Ecosport: Titanium M/T, Titanium A/T y Freestyle 4WD.
Camionetas
- Explorer: XLT 4X2, XLT 4X4 y Limited 4X4.
Pick-Ups
- F-250: XL 4X2 y XLT 4X4.
- F-250 Doble Cabina: F-250 DC Lariat 4X4.
- F-350: 4X2 MT y 4X4 MT.
Camiones
- Cargo 815 y 816: Chasis corto y Chasis largo.
- Cargo 1721: Chasis corto y Chasis largo.

8
1.4 Misión
Ser la compañía líder mundial en producción y servicios automotores, orientada
hacia el consumidor, mediante un sistema común de producción simplificado, flexible
y disciplinado, definido por un conjunto de principios y procesos, que emplee grupos
de personas capaces y facultados que aprenda y trabaje en conjunto de manera segura,
en la producción y entrega de productos que consistentemente excedan las
expectativas de los clientes en calidad, costo y tiempo, donde la calidad es lo primero;
los clientes son la razón de hacer de todos los actos y el mejoramiento continuo
esencial para el éxito.
1.5 Visión
La organización Ford Motor Company es una familia global diversa, con una
tradición de la cual están orgullosos, comprometidos con pasión a ofrecer productos y
servicios excepcionales que mejoren la calidad de vida de las personas.
1.6 Objetivos
- Ensamblar autos de excelente calidad, tomando en cuenta la productividad,
competitividad y rentabilidad; además de establecer y aplicar políticas y
normas de calidad que permitan brindar a sus clientes tanto internos como
externos un óptimo servicio, asegurándose que el mismo satisfaga totalmente
sus necesidades y requerimientos en un mínimo de tiempo y con calidad.
- Ofrecer a los empleados un crecimiento personal, logros de adiestramiento y
participación en el proceso de toma de decisiones, capacitando y motivando
al personal a trabajar en equipo y permitiéndole oportunidades de desarrollo
basándose en los valores más altos de conducta y ética profesional.
- Satisfacer con éxito las necesidades de su cliente ensamblando a una óptima
calidad bajo un control que se rige por las exigencias competitivas del
mercado, asegurando el crecimiento y viabilidad de nuestra empresa.

9
1.7 Valores
- El cliente es la máxima prioridad. Se hace lo que sea correcto para los
clientes, la gente, el ambiente y la sociedad. Mejorando todo lo que se hace,
proporciona retornos superiores a los accionistas.
- El negocio está impulsado por el enfoque hacia el consumidor, la creatividad,
la efectividad y un espíritu emprendedor.
- Ford Motor Company conforma un gran equipo. Se respeta y valora la
contribución de cada uno de los trabajadores.
- La integridad de la empresa nunca se compromete y realiza una contribución
positiva a la sociedad.
- Constantemente se esfuerza para mejorar todo lo que hace.
- Guiados por estos valores, proporciona retornos superiores a nuestros
accionistas.
1.8 Políticas
Política ambiental
Ford Motor de Venezuela, S.A., empresa dedicada al ensamblaje de Vehículos y
distribución de partes y accesorios, está comprometida a:
- Cumplir y superar los requerimientos legales ambientales del país y otros
requisitos corporativos.
- Minimizar la contaminación.
- Reducir los impactos adversos al ambiente.
- Mejorar continuamente en el desempeño ambiental mediante el
establecimiento y revisión de objetivos y metas ambientales.
La política ambiental de Ford Motor de Venezuela S.A., empresa dedicada al
ensamblaje de vehículos, es ser una organización con un alto sentido de
responsabilidad en la protección del medio ambiente. Ford Motor de Venezuela S.A.
está comprometida a cumplir con la política corporativa No. 17 de Ford Motor
Company, incluyendo el compromiso a cumplir, y cuando sea posible, superar los

10
requerimientos legales ambientales del país al igual que otros requisitos corporativos,
a la reducción y seguimiento en la generación de desechos, minimización de la
contaminación y a la reducción de impactos adversos al ambiente.
Ford Motor de Venezuela S.A. está comprometida a la mejora continua de su
desempeño ambiental mediante el establecimiento de objetivos ambientales que serán
periódicamente revisados con el fin de alcanzar la visión y los lineamientos
ambientales de nuestra planta, tomando en cuenta los objetivos del negocio, los
puntos de vista de los empleados y de la comunidad en general.
Esta política ambiental cubre todas las actividades de Ford Motor de Venezuela
S.A. directa o indirectamente relacionadas con el ensamblaje de vehículos y
distribución de partes y accesorios. Estamos comprometidos a gerenciar nuestras
operaciones, procesos, materiales, y personal para reducir el impacto al ambiente de
nuestras actividades. Nuestro Sistema de Gestión Ambiental identificará y manejará
aspectos ambientales significativos, con especial énfasis en:
- Tratamiento y control de descarga de aguas industriales de desecho para
ayudar en el saneamiento del Lago de Valencia.
- Control de efluentes sanitarios.
- Reducción, reúso, y reciclaje de desechos y material de empaque, como
también su seguimiento hasta la disposición final.
- Uso eficiente de la energía.
- Control de las emisiones atmosféricas.
- Conservación de recursos naturales.
Política de Calidad
En Ford Motor de Venezuela, empresa dedicada al ensamblaje de vehículos y
distribución de partes y accesorios; estamos comprometidos en lograr la satisfacción
total de nuestros clientes superando sus expectativas al menor costo, a través del
mejoramiento continuo de nuestros procesos, productos, servicios y sistema de
gestión de calidad

11
Política de Salud y Seguridad
Ford Andina mantiene como política de Salud y Seguridad su firme compromiso
en establecer y mantener un ambiente de trabajo seguro y saludable para todos sus
trabajadores. La protección de la salud y seguridad de nuestros trabajadores, es el
elemento fundamental de las decisiones de la empresa. Por lo tanto, su política en
materia de Salud, Seguridad y Ambiente es:
- Promover la mejora continua de los indicadores de Salud, Seguridad y
Ambiente de todos los trabajadores, mediante la continua aplicación de
programas efectivos de prevención y comunicación.
- Alcanzar la meta de cero lesiones a personas y cero daños al ambiente,
equipos, material y/o propiedades de la compañía, a través del fomento de
prácticas y/o condiciones seguras de manera continua.
- Asegurar el orden, la limpieza, el mantenimiento y la organización en todos
los lugares de la planta de ensamblaje y de la empresa en general.
- Cumplir con todas las regulaciones gubernamentales y corporativas en materia
de Salud, Seguridad y Ambiente.
- Desarrollar e implementar programas de entrenamiento a todo el personal para
reforzar sus conocimientos y competencias en materia de Salud, Seguridad y
Ambiente.
- Desarrollar programas de promoción de la seguridad y salud en el trabajo, de
prevención de accidentes y enfermedades ocupacionales, de recreación,
utilización del tiempo libre, descanso y turismo social.
Todos los trabajadores tienen que ser responsables de implementar efectivamente
esta política y requiere que la conducta de cada trabajador fomente las acciones y
condiciones seguras. También tienen la responsabilidad de alertar al supervisor
inmediato, representante sindical o delegado de prevención apropiado, sobre
cualquier práctica o condición que no esté alineada con esta política.

12
Los miembros de la gerencia, con su total compromiso en materia de salud y
seguridad, tienen un rol de liderazgo activo para asegurar que esta política se
convierta en una parte integral del trabajo diario, en cada tarea ejecutada y en la
mejora continua de la protección de nuestros trabajadores.
1.9 Estructura organizacional de la empresa
La estructura organizativa, orientada al compromiso de suministrar en forma
permanente, productos que satisfagan las necesidades de los consumidores, mediante
el mejoramiento continuo de la calidad en todos los aspectos asegurando la
permanencia de la empresa y contribuyendo al mejoramiento de la calidad de vida.
Figura 1. Estructura organizativa de Ford Motor de Venezuela
Fuente: Dirección de operaciones de planta, (2013).
1.10 Descripción del departamento
El Departamento de Vehicule Operation Manufacturing Engineer (VOME), es el
área encargada de planificar y ejecutar la incorporación de nuevos equipos,
herramientas y facilidades, adaptación de procesos requeridos en planta, para
ensamblar nuevos modelos de vehículo bajo los estándares de calidad y aceptación de

13
acuerdo al Vehicle Operations Structures Standards (VOSS), así como mejorar la
infraestructura de la organización.
En VOME, se realizan constantes estudios del proceso en general, para la
elaboración de proyectos de mejora de cada uno de los procesos, haciéndolos más
eficientes y siempre buscando mejorar las condiciones de trabajo para los operarios a
través de estudios ergonómicos continuos de los puestos de trabajo.
1.11 Misión del Departamento Vehicule Operation Manufacturing Engineer
(VOME)
Proporcionar un excelente servicio que satisfaga las necesidades de clientes
mediante un equipo de personas proactivas que mejoren constantemente los
procedimientos y controles a fin de adaptarlos a los nuevos requerimiento.
1.12 Estructura organizacional del departamento
El departamento de Vehicule Operation Manufacturing Engineer está conformado
por un Director de Operaciones de Planta, el Superintendente de VOME, Los
Coordinadores de Manufactura de las distintas áreas de planta, Los Ingenieros de
Manufactura, el Ingeniero dimensional, el Ingeniero de Procesos, los Ingenieros de
FordLand, los Auditores, el Especialista, el Líder de Manufactura, los Mecánicos, los
Soldadores y los pasantes. Su finalidad es la de planear y ejecutar la incorporación de
nuevos equipos, herramientas y facilidades, aparte de evaluar, analizar, cuantificar y
medir el impacto de los cambios generados por la implementación de los nuevos
modelos, con el propósito de garantizar la eficiencia de los recursos y en paralelo
implementar procesos seguros, confiables, mantenibles que a su vez garanticen la
calidad del producto final.

14
Figura 2. Estructura organizativa del departamento de manufactura
Fuente: Dirección de operaciones de planta, (2013).
1.13 Actividades a desarrollar durante el periodo de pasantías
Dentro del departamento de Vehicule Operation Manufacturing Engineer, VOME;
se desarrolló una serie de actividades realizadas por el pasante tales como:
- Registro en el inventario de almacén de las piezas críticas de los equipos
instalados en planta.
- Check List de mantenimiento de los equipos instalados en planta.
- Certificado de ingreso de los equipos instalados en planta.
- Levantamiento en Autodesk Autocad de Layout de ciertas áreas de la planta.
- Levantamiento de la información del proceso de montaje de estribos en los
camiones Cargo 816.

15
- Realización de Croquis de la estación de montaje de estribos del Cargo 816.
- Estudio de los estándares de ergonomía y seguridad VOSS.
- Generación y análisis de soluciones al problema estación de montaje de estribos
del Cargo 816
- Estudio económico del diseño y verificación de la factibilidad.
- Presentación de la propuesta de modificaciones en la estación y del
manipulador de estribos de cargo 816.
- Asistencia a las caminatas Ambientales y de Seguridad.
- Participación en el Voluntariado de Ford Motors de Venezuela S.A.
- Apoyo en todas las tareas que se pudieran presentar en el departamento.
- Cumplimiento del calendario.

16
CAPÍTULO II
EL PROBLEMA
En este capítulo, el objetivo está centrado en explicar detalladamente la situación
actual del proceso de colocación de estribos en los camiones Cargo 816 en la
ensambladora de Vehículos Ford Motors de Venezuela. Según Arias (1999) “consiste
en describir de manera amplia la situación objeto de estudio, ubicándola en un
contexto que permita comprender su origen y relaciones” (p 09).
2.1 Planteamiento del Problema
Dentro de las diferentes formas de transporte que existen, el vehículo es uno de los
más utilizados ya que permite realizar traslados de un lugar a otro, tanto de personas
como otros tipos de carga. Por ello, las ensambladoras de vehículos, las cuales
tienden a competir por ser líderes en el mercado; día a día se preocupa por aplicar
principios de calidad, mejoramiento continuo, eficiencia y eficacia en cada uno de los
procesos y productos.
Para atender esta realidad, En todas las Ensambladoras de Vehículos, se debe tener
presente que cualquier área, proceso o actividad, por excelentes que sean pueden ser
mejoradas. Ante estos escenarios, cabe considerar que, es necesario mantener como
filosofía el mejoramiento continuo apoyado en los estándares requeridos por las casas
matrices.
Por su parte, Venezuela cuenta con muchas empresas ensambladoras de vehículos
que Manejan grandes cantidades de inventarios y contribuyen al desarrollo
económico del país. Entre estas empresas se encuentra la Ford Motors de Venezuela
S.A. que a través de los años se ha visto en la necesidad de aumentar progresivamente
su producción para de este modo poder cumplir con la demanda del mercado
Venezolano.

17
Hoy en día, esta empresa se ha consolidado como una de las principales planta
ensambladora del país, generando más de 2000 empleos; tanto directos como
indirectos. Para ello, dispone de una estructura organizativa, donde cada
departamento y cada persona cumplen funciones específicas con las cuales se logran
los objetivos planteado anualmente.
Asimismo, con la continua integración de nuevos vehículos al mercado
Venezolano suscitan contrariedades que afectan la política de seguridad y salud de la
ensambladora de vehículos. Tales efectos, se deben a que cada día existen procesos
de mayor magnitud y exigencia que perturban de manera significativa la planta.
En torno a lo expuesto, para mucho de los trabajadores, las molestias a causas
disergonómicas tales como dolores, inflamación, rigidez, hormigueo,
entumecimiento, y enrojecimiento en los lugares de lesión figuran entre los
problemas prioritarios en materia de seguridad y salud que deben resolverse. De
alguna manera u otra, existe una cantidad importante de trabajadores a los que afecta
un proceso o diseño mal concebido, esto hace que los aspectos ergonómicos tengan
importancia. A causa de la prevalecía de los problemas de salud relacionados con la
inaplicación de las normas de ergonomía ISO 9241, ISO 6385, ISO 10075, Ley
Orgánica de Prevención, Condiciones y Medio Ambiente de Trabajo (LOPCYMAT)
y la sección uno del manual vehicle operations-structures standards (VOSS) en el
lugar de trabajo, esta cuestiones se han convertido en aspectos relevantes que han
dado origen a conflictos a nivel laboral.
La ergonomía, se presenta como la ciencia multidisciplinaria que cambia el modo
y la manera de los procesos de desempeño del ser humano y el ambiente en que se
desenvuelve, es un aspecto que a través del tiempo ha adquirido mucha importancia
entre las organizaciones, debido a la cultura de prevención de riesgos que se ha
venido implantando en la conciencia de quienes tratan de asegurarse de la Salud y
Seguridad de los trabajadores. Considerando el concepto de ergonomía que habla de
la “adaptación del trabajo al hombre” se puede ubicar a la misma desde dos

18
perspectivas, la primera basada en la producción de bienes y servicios considerando
el bienestar del usuario, y la segunda enfocada en el medio ambiente donde se
desenvuelve el trabajador, analizando la interacción entre las personas y los equipos
que éstas emplean para buscar el mayor confort posible en los usuarios y
minimizando la aparición de diversas enfermedades ocupacionales como la bursitis,
celulitis, cuello u hombros tensos, dedos engatillados, epicondilitis, ganglios,
osteoartritis, síndrome del túnel del carpo bilateral, tendinitis, teno sinovitis, entre
otras; relacionadas con riesgos disergonómicos.
Éste último aspecto es tratado en los artículos 59 y 60 de la Ley Orgánica de
Prevención, Condiciones y Medioambiente de Trabajo (LOPCYMAT); donde se
plasma que los métodos de trabajo así como las máquinas y herramientas utilizados
en el proceso de trabajo deben ser adaptados a las características psicológicas,
cognitivas, culturales y antropométricas de los trabajadores y trabajadoras, para lo
cual el empleador deberá realizar los estudios pertinentes e implantar los cambios que
sean necesarios para alcanzar las condiciones de confort de los trabajadores.
Con la inclusión del nuevo modelo de camiones cargo al mercado, la planta
ensambladora de vehículos Ford Motor de Venezuela S.A., no escapa de esta
realidad. Formando parte de una empresa transnacional de origen norteamericano sus
instalaciones en Venezuela están estructuradas mediante áreas de Producción.
De acuerdo con, auditorías realizadas por el departamento de seguridad y salud
laboral, durante los pilotos de prueba de los camiones cargo 816, se registraron en la
línea final de camiones; específicamente en la estación de montaje de estribos la
cantidad de tres factores disergonómicos de gran impacto, ya que en este momento 4
operarios; dos de cada lado del camión toman conjuntamente el estribos previamente
ensamblado mediante otro proceso y dejados en la estación de montaje de estribos por
el equipo de logística de la ensambladora de vehículo, estos operarios trasladan unos
tres metros el estribo de 10 kg hasta llegar a la cabina del camión, a su vez, está se
encuentra montada sobre la línea la cual tiene un movimiento continuo debido a la

19
producción en masa del mismo, los operarios posicionan el estribo en la parte baja de
la puerta del camión e insertan los pernos; por último, con las pistolas de ajuste
neumáticas se ajustan cada uno de los pernos, aparte las maquinarias y equipos
empleados en dicha estación no se adaptan al proceso del nuevo modelo, ya que son
de larga data y en su diseño original, no se contemplaban los cambios que presenta el
nuevo cargo 816 .Adicionalmente, existe la posibilidad de caída del estribo por el mal
agarre de los operarios causándoles heridas, contusiones u otros tipos riesgos que
afecten la seguridad del personal involucrado.
En consideración a lo anterior, Es imprescindible acotar que se desea mejorar las
condiciones de trabajo, para mejorar la calidad y efectividad del proceso, por
consiguiente se desea implementar un sistema que facilite al trabajador el montaje del
estribo del cargo 816 a fin de disminuir el riesgo de lesiones y accidentes laborares.
2.2 Formulación del Problema
Rotación del personal de la estación de “montaje de estribos” en la línea final de
camiones de la ensambladora de vehículos Ford Motors de Venezuela S.A. y aumento
del costo de producción del camión cargo 816 debido a lesiones musculares
producidas por condiciones sub-estándar de ergonomía y seguridad al realizar la
instalación de los estribos al mismo a razón de su peso y gran tamaño.
2.3 Objetivo General
Diseñar un asistente de manipulación para el montaje de estribos de camiones
cargo 816 que se adapte a los estándares de ergonomía y seguridad para reducir el
riesgo de lesiones en los trabajadores de la ensambladora de vehículos Ford Motor de
Venezuela.
2.4 Objetivos Específico
- Identificar la situación actual en la estación de montaje de estribos de
camiones cargo 816 en la empresa Ford Motor de Venezuela S.A.
- Revisar las posibles variables a modificar en la estación de montaje de
estribos de camiones cargo 816 en la empresa Ford Motor de Venezuela S.A.

20
- Proponer el diseño de un asistente de manipulación para el montaje de estribos
en los camiones cargos 816 que cumpla con los estándares de ergonomía y
seguridad.
- Evaluar la factibilidad técnica y económica de la propuesta.
2.5 Justificación de la Investigación
Actualmente, las organizaciones a nivel mundial deben estar comprometidas a
buscar la necesidad de mejorar en forma continua, con el fin de incrementar la
productividad de sus procesos, lo cual les permitirá brindar productos de excelente
calidad para satisfacer y cumplir con las expectativas de los clientes.
Ford Motor de Venezuela S.A., siempre ha enfocado su empeño hacia la conquista
del mercado automotor, a fin de llegar a posicionarse como la primera ensambladora
de vehículos en Venezuela y el mundo. En vista de esto, la empresa requiere que sus
procesos sean cada vez más eficientes, buscando reducir a su mínima expresión los
costos asociados al riesgo de lesiones y accidentes laborares puesto que es una
actividad que no le agrega valor al producto final y que, por el contrario, le incorpora
un costo adicional.
Con la realización del diseño de un asistente de manipulación, basado en
estándares de calidad y aceptación Vehicle Operations Structures Standards (VOSS),
se pretende contribuir a mejorar los problemas disergonómicos e inseguros, además
de cumplir con los reglamentos que designa el estado. Todo lo antes expuesto
justifica este informe de pasantías pues la aplicación del conocimiento teórico
generara mejoras a nivel interno y externo en la empresa.
2.6 Alcance
En lo referente al alcance de esta investigación, consiste en diseñar un asistente de
manipulación para reducir el riesgo de lesiones por condiciones sub-estándar de
ergonomía y seguridad en los trabajadores, referida únicamente a la estación de
montaje de estribo de cargo 816 ubicada en el área de línea final camiones, dentro de
la ensambladora de vehículos Ford Motor de Venezuela.

21
2.7 Limitaciones
- Debido a diferentes factores ajenos a la presente investigación en algunas
oportunidades el proceso productivo del área estudiada se encuentra detenido
por falta de materia prima o programación de otras prioridades, lo que
dificulta el seguimiento.
- La información suministrada en este proyecto está sujeta a las políticas de
confidencialidad y derechos reservados de la empresa.
- El tiempo de desarrollo de la investigación se cuenta con 3 meses de
pasantías, que contemplan normalmente 8 horas laborales en la empresa.

22
CAPÍTULO III
MARCO REFERENCIAL CONCEPTUAL
El marco teórico cumple la finalidad de encaminar la investigación, la cual debe
estar orientada hacia el tema respectivo, Diseñar un asistente de manipulación para el
montaje de estribos de camiones cargo 816 que se adapte a los estándares de
ergonomía y seguridad para reducir el riesgo de lesiones en los trabajadores de la
ensambladora de vehículos Ford Motor de Venezuela.
En pro a obtener la mayor información posible que sustentara la construcción de
este proyecto se describen investigaciones realizadas por algunos autores, quienes se
han interesado en aportar sus conocimientos como precedente o fuente de apoyo para
un acertado enfoque del problema. Constituyendo un valioso aporte para la
realización de esta investigación. Según Arias (1999) infieres que “los antecedentes
de una investigación se refieren a los estudios previos y tesis de grado relacionados
con el problema planteado” (p 13).
3.1 Antecedentes
Para iniciar los antecedentes bibliográfico se encuentra la investigación realizada por
Moreno, A. (2013) egresado de la Universidad José Antonio Páez quien realizo una
investigación titulada “Mejoras ergonómicas para el proceso de cerrado de cables
de acero, en el área de la celda N°1, planta cables, centro de trabajo San
Joaquín, de la empresa Vicson, S.A.” El propósito planteado consistía en analizar
los puestos de trabajo a fin de ofrecer propuestas para disminuir a un nivel aceptable
los riesgos ergonómicos para los trabajadores de la empresa. La investigación se fijó
en la modalidad de proyecto factible basado en un diseño de campo, con un nivel
descriptivo y documental, se concentró en mayor medida en el área de la celda N°1,
planta cables, centro de trabajo San Joaquín, de la empresa en estudio, donde se

23
encontraban presente la mayor cantidad de factores disergonómicos. Para la
obtención de la información se

24
usaron técnicas e instrumentos de recolección de datos como la observación directa,
la entrevista no estructurada y la revisión documental. El análisis del proceso permitió
determinar los aspectos disergonómicos de la operación y a partir de allí, establecer
propuestas de mejoras ergonómicas, lo que le permitía satisfacer la política de
seguridad y salud de la empresa. Este trabajo aporta a la presente investigación una
referencia a la metodología empleada en el desarrollo de la evaluación ergonómica de
un puesto de trabajo.
Seguidamente, la investigación realizada por García M. (2011) egresado de la
Universidad Nacional Experimental de Guayana realizo una investigación titulada
“Relación del puesto de trabajo con afección patológica osteomusculares en una
empresa automotriz” el propósito planteado consistía en analizar la relación entre el
puesto de trabajo de soldador electropunto en su componente biomecánico y la
presencia de patologías osteomusculares, en una ensambladora automotriz. La
investigación se insertó en la modalidad de proyecto factible con diseño de campo y a
un nivel descriptivo; la población fue ochenta (80) trabajadores de la empresa objeto
de estudio y la muestra estuvo conformada por veintes (20) trabajadores que
realizaron consultas por sintomatología osteomusculares durante el año 2010. Para la
técnica de recolección de datos se utilizó la técnica de observación directa y como
instrumento la filmación digital del puesto de trabajo. Se concluyó que los
trabajadores de soldadura de los puestos de trabajo del área de electropunto están
expuesto a riesgos disergonómicos posturales al momento de ejecutar su actividades
laborales, en especial los que realizan las tareas que contemplan los puestos de
trabajo de: repunteo de matriz principal, repunteo de piso frontal y ensamble de
matriz principal. Esta investigación da como aporte una metodología sistemática para
la evaluación ergonómica de los puestos de trabajo.
Por otra parte, Berrios J. (2010) egresado de la Universidad José Antonio Páez
realizo una investigación titulada “Diseño de un dispositivo mecánico para el
desenrollado de láminas en bobina de diferentes materiales en la empresa aire

25
limpio global C.A.” El propósito planteado tuvo como objetivo proponer el diseño
de un dispositivo mecánico para el desenrollado de láminas en bobina de diferentes
materiales de la empresa en estudio. Los inconvenientes presentados en la empresa
por no poseer desarrolladores de láminas de diferentes materiales, originaban que el
proceso no tuviera una secuencia de operaciones de trabajo, generando
contratiempos, disminuyendo la productividad del proceso. Para la obtención de la
información se usaron técnicas e instrumentos de recolección de datos como la
observación directa, la entrevista no estructurada y la revisión documental. Se
concluyó que con la elaboración del diseño de un dispositivo mecanico se consigue
un aumento tanto en la secuencia de operaciones como en la productividad de la
empresa. Esta tesis tiene un gran aporte con la presente investigación ya que se
utilizaron los conocimientos de cálculo de elementos mecánicos para realizar el
diseño.
Por último, se encuentra la investigación realizada por Navarro, V. (2010)
egresado de la Universidad Tecnológica Equinoccial la investigación titulada
“Diseño y construcción de efector final de un brazo robótico neumático para
colocar parabrisas.” El propósito planteado consistía en incorporar a una
determinada empresa un brazo robótico neumático para el montaje de parabrisas. La
investigación se fijó en la modalidad de proyecto factible y diseño de campo ya que la
recolección de datos fue realizada directamente de la realidad donde ocurren los
hechos, la población fue la empresa objeto de estudio AYMESA S.A., y la muestra
estuvo conformada por los trabajadores y tiempos muertos en la línea de producción.
Para la obtención de la información se usaron técnicas e instrumentos de recolección
de datos como la observación directa, la entrevista no estructurada y la revisión
documental. Se concluyó que con la optimización del proceso productivo se reducen
los accidentes de trabajo, con esta herramienta se contribuye a mejorar la ergonomía
de los trabajadores involucrados en dicho proceso, los resultados de esta
investigación obligarán a trabajadores y autoridades a asumir con responsabilidad los

26
retos de la implementación de nuevas herramientas para el beneficio de la empresa
AYMESA S.A., ya que al eliminar o reducir los accidentes sus trabajadores laborarán
con mayor eficiencia. El aporte más significativo de este este estudio, radica en que
permite visualizar la metodología, y proceso del diseño de un manipulador neumático
para una línea de ensamblaje de vehículo.
3.2 Bases Teóricas
Las bases teóricas representan la referencia del problema planteado, es por ello
que toda la investigación deberá estar estructurada por la teoría y el método de trabajo
para complementar los hechos y permitir la relevancia del estudio. Según Arias
(1999) infiere que “las bases teóricas comprenden un conjunto de conceptos y
proporciones que constituyen un punto de vista o enfoque determinado, dirigido a
explicar el fenómeno o problema planteado” (p 39). Por lo tanto se señalaran las
siguientes.
3.2.1 Camiones
Es un vehículo motorizado para trasporte de bienes. A diferencia de los coches,
que suelen tener una construcción monocasco, muchos camiones se construyen sobre
una estructura resistente denominada chasis.
En la mayoría la estructura está integrada por un chasis portante, generalmente un
marco estructural, una cabina, una estructura para trasportar la carga y un eje trasero
que suele poseer doble juegos de ruedas, denominados popularmente como morochas.
Se pueden establecer muchas clasificaciones de camiones pero la más común es
por tipo de carrocería:
Camión plataforma. El que equipa una plataforma lisa
Camión de caja abierta. El que equipa una plataforma con "laterales" (adrales,
conocidos en Venezuela como "estacas").
Camión de caja cerrada. El que equipa una caja cerrada la cual se conoce como
furgón o cava, esta su vez puede ser:
Normal: destinada únicamente a contener y proteger la carga,

27
Acondicionado: con una estructura diseñada y construida para transportar
mercancías a temperaturas controladas con paredes de un espesor mínimo de
45 mm, pueden a su vez ser:
Isotermos: mantienen la temperatura (frío o calor) de la mercancía.
Frigoríficos/congeladores: enfrían y refrigeran o congelan la mercancía.
Camión cisterna: el que equipa una cisterna para el transporte de gases, líquidos o
sustancias pulverulentas.
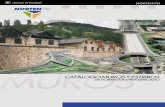
Figura 3. Camión plataforma Cargo 1721 Fuente: (Ford Motor de Venezuela S.A., 2015)
Figura 4. Camión de caja abierta Cargo 816 Fuente: (Ford Motor de Venezuela S.A., 2015)

28
Figura 5. Camión caja cerrada Midlum 220 Fuente: (Groupe Renault, 2014)
Figura 6. Camión isotermo Fuente: (DAF, 2015)
3.2.2 Estribos de vehículos
Son accesorios para autos que sirven como escalón y que son colocados en la
entrada y salida del vehículo para hacer más fácil el acceso hacia el mismo.
Figura 7. Estribo de cargo 816 Fuente: González, L (2015)

29
3.2.3 Manipuladores de carga neumáticos
Montero Jiménez S.A.S., (2014) señala que la mayor parte de los manipuladores
industriales actuales son esencialmente brazos articulados con un número de grados
de libertad que oscila entre 2 y 5, cuyos movimientos son de tipo secuencial, es decir,
es una máquina de accionamiento manual que permite el movimiento de una carga de
manera rápida y con muy poco esfuerzo, realizando movimientos en cualquier
dirección del espacio dentro de límites definidos en el proyecto, facilitando al
operador trabajar sin condiciones disergonómicas y en condiciones de máxima
seguridad. El equilibrio del peso del implemento, con o sin carga, se obtiene mediante
la acción de un balancín neumático. Estos dispositivos son herramientas útiles para
manipular cargas de formas y dimensiones distintas.
En todos los ambientes de trabajo el uso de manipuladores industriales es la única
solución válida para la manipulación de cargas debido a los siguientes aspectos:
- Mantener constante la producción (un hombre que manipula manualmente
cargas no puede mantener el mismo ritmo de trabajo durante todas las horas y
días laborables).
- Prevenir dolores musculo esqueléticos y/o lesiones osteomusculares en los
operarios.
- Dar previo cumplimiento a la legislación referente a Salud Ocupacional.
3.3.3 Estructura de los manipuladores
Las características básicas de la estructura de los manipuladores están formadas
por los tipos de articulaciones y configuraciones clásicas de brazos mecánicos
industriales, de forma más precisa, un manipulador industrial convencional es una
configuración de cadenas cinemáticas abiertas formadas por un conjunto de eslabones
o elementos de la cadena interrelacionados mediante articulaciones o pares
cinemáticos que permiten el movimiento relativo entre los sucesivos eslabones como
lo esquematiza la figura 6.

30
Se dice que una cadena cinemática es abierta si, numerando secuencialmente los
enlaces desde el primero, cada enlace está conectado mediante articulaciones
exclusivamente al enlace anterior, y al siguiente, excepto el primero, que se suele fijar
al suelo, y el último, uno de cuyos extremos queda libre y equipado con una
herramienta apropiada para manipular objetos. (Baturone, 2001)
Figura 8. Cadena cinemática abierta
Fuente: (Baturone, 2001)
3.3.4 Tipos de articulaciones
Existen diferentes tipos de articulaciones. Las más utilizadas son las que se indican
en la figura N° 9.
Los movimientos cinemáticos de un brazo, pueden clasificarse de acuerdo al tipo
de articulación que usan para determinar su movimiento; y pueden ser:
Articulación de rotación. Suministra un grado de libertad consistente en una rotación
alrededor del eje de la articulación. Está articulación es, la más empleada.
Articulación prismática. El grado de libertad consiste en una traslación a lo largo del
eje de la articulación.
Articulación cilíndrica. Existen dos grados de libertad: una rotación y una traslación.
Articulación planar. Está caracterizada por el movimiento de desplazamiento en un
plano, existiendo por lo tanto, dos grados de libertad.
Articulación esférica. Combina tres giros en tres direcciones perpendiculares en el
espacio.

31
El espacio de trabajo es el conjunto de puntos en los que puede situarse el efector
final del manipulador. Corresponde al volumen encerrado por las superficies que
determinan los puntos a los que accede el manipulador con su estructura totalmente
extendida y totalmente plegada.
Por otra parte, todos los puntos del espacio de trabajo no tienen la misma
accesibilidad. Los puntos de accesibilidad mínima son los que las superficies que
delimitan el espacio de trabajo ya que a ellos solo puede llegarse con una única
orientación. (Baturone, 2001)
Figura 9. Tipos de articulaciones
Fuente: (Baturone, 2001)

32
3.3.5 Coordenadas de los movimientos
La estructura del manipulador y la relación entre sus elementos proporcionan una
configuración mecánica, que da origen al establecimiento de los parámetros que hay
que conocer para definir la posición y orientación del elemento terminal.
Fundamentalmente existen 4 estructuras clásicas en los manipuladores, que se
relacionan con los correspondientes modelos de coordenadas en el espacio, y son los
que se detallan a continuación:
3.3.5.1 Configuración cartesiana
Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales
corresponden a los movimientos localizados en los ejes X, Y y Z.
Los movimientos que realiza este robot entre un punto y otro son con base en
interpolaciones lineales. Interpolación, en este caso, significa el tipo de trayectoria
que realiza el manipulador cuando se desplaza entre un punto y otro.
A la trayectoria realizada en línea recta se le conoce como interpolación lineal y a la
trayectoria hecha de acuerdo con el tipo de movimientos que tienen
sus articulaciones se le llama interpolación por articulación. (Baturone, 2001)
Figura 10. Configuración Cartesiana
Fuente: (Baturone, 2001)

33
3.3.5.2 Configuración Cilíndrica
Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres
grados de libertad. El manipulador de configuración cilíndrica está diseñado para
ejecutar los movimientos conocidos como interpolación lineal e interpolación por
articulación. (Baturone, 2001)
Figura 11. Configuración cilíndrica
Fuente: (Baturone, 2001)
3.3.5.3 Configuración polar
Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento
distinto: rotacional, angular y lineal.
Este manipulador utiliza la interpolación por articulación para moverse en sus dos
primeras articulaciones y la interpolación lineal para la extensión y retracción.
(Baturone, 2001)

34
Figura 12. Configuración polar
Fuente: (Baturone, 2001) 3.3.5.4 Configuración angular
Presenta una articulación con movimiento rotacional y dos angulares. Aunque el
brazo articulado puede realizar el movimiento llamado interpolación lineal (para lo
cual requiere mover simultáneamente dos o tres de sus articulaciones), el movimiento
natural es el de interpolación por articulación, tanto rotacional como angular.
(Baturone, 2001)
Figura 13. Configuración angular
Fuente: (Baturone, 2001) 3.3.6 Neumática
La neumática es una de las tecnologías más antiguas de uso industrial, que ha
hecho de las líneas productivas campos de germinación de múltiples aplicaciones,

35
que van desde herramientas manuales, como martillos y destornilladores, hasta
pesadas prensas y extrusores; desde bombas y válvulas para el suministro de aire de
sistemas de movimiento, hasta precisos dosificadores para la industria química y
alimenticia. Las tecnologías se comprimen el uso del aire comprimido se ha
extendido a múltiples campos de la manufactura y ensamble, pero paradójicamente la
tecnología de compresión de aire en sí misma no mostró una evolución sobresaliente
durante sus ya varios siglos de existencia. (Rocatek S.A.S, 2014).
Según Creuss A (2007) la palabra neumática se refiere al estudio del movimiento
del aire. Los sistemas de aire comprimido proporcionan un movimiento controlado
con el empleo de cilindros y motores neumáticos y se aplican en herramientas,
válvulas de control y posicionadores, martillos neumáticos, pistolas para pintar,
motores neumáticos, sistemas de empaquetado, elevadores, herramientas de impacto,
prensas neumáticas, robots industriales, vibradores, frenos neumáticos, etc.
Las ventajas que presenta el uso de la neumática son el bajo coste de sus
componentes, su facilidad de diseño e implementación y el bajo par o la fuerza escasa
que puede desarrollar a las bajas presiones con que trabaja (típico 6 bar) lo que
constituye un factor de seguridad. Otras características favorables son el riesgo nulo
de explosión, su conversión fácil al movimiento giratorio así como al lineal, la
posibilidad de transmitir energía a grandes distancias, una construcción y
mantenimiento fáciles y la economía en las aplicaciones.
Entre las desventajas figura la imposibilidad de obtener velocidades estables
debido a la compresibilidad del aire, los altos costes de la energía neumática y las
posibles fugas que reducen el rendimiento. (Atlas Copco , 2010)
3.3.6.1 Generación de aire comprimido
El aire comprimido como fuente de la potencia en los sistemas neumáticos es
generado por una maquina llamada compresor, existen varios tipos de compresores,
los cuales por lo general se clasifican en dos tipos según su forma de funcionamiento.

36
a) Compresores de desplazamiento Estos tipos de compresores encierran un
volumen de gas para después incrementar su presión al reducir el volumen del
espacio encerrado mediante el movimiento de uno o más miembros móviles,
accionados por una fuente de potencia externa, muy comúnmente motores eléctricos
o de explosión. Como se ilustra en la figura 14, cuando el pistón se desplaza hacia la
derecha una primera válvula cierra la descarga del compresor mientras que una
segunda válvula abre la entrada para admitir aire dentro del cilindro del pistón. En
una segunda etapa el pistón se desplaza hacia la izquierda, lo cual provoca que la
segunda válvula cierre la entrada de aire, mientras que la primera válvula, dotada de
un resorte de compresión, deja salir el aire del cilindro una vez haya alcanzado la
presión de diseño.
Figura 14. Ilustración del proceso de compresión en compresor de pistón con
ejecución de válvulas de disco de acero inoxidable Fuente: (Atlas Copco , 2010)
b) Compresores dinámicos. También denominadas turbomáquinas son equipos
funcionan mediante la aplicación de la potencia de eje en un impulsor que le otorga
energía cinética al gas, el cual es pasado por una serie de difusores para transformar
esa energía cinética en energía elástica, es decir presión. Dependiendo del sentido del
flujo pueden denominarse como axiales, si la dirección de salida del gas es paralela a
la de entrada, radiales (centrífugos), si la dirección de la salida del fluido es
perpendicular a la de entrada del fluido, o mixtas, para fluidos con componentes
axiales y radiales. Estos compresores, a diferencia de los compresores de

37
desplazamiento, trabajan a una presión constante y las condiciones de entrada del
fluido producen un cambio en la capacidad del equipo.
Figura 15. Esquema de un moderno compresor centrífugo de alta velocidad con
accionamiento directo Fuente: (Atlas Copco , 2010)
3.3.6.2 Actuadores
Los actuadores neumáticos son equipos que convierten la energía del aire
comprimido en trabajo mecánico, generando un movimiento lineal mediante
servomotores de diafragma o cilindros; o bien un movimiento giratorio con motores
neumáticos.
Los actuadores neumáticos de movimiento lineal son utilizados comúnmente en
aplicaciones donde la fuerza de empuje del pistón y su desplazamiento son elevados.
Estos consisten de un cilindro cerrado con un pistón en su interior que desliza y que
transmite su movimiento al exterior mediante un vástago. Se compone de las tapas
trasera y delantera, de la camisa donde se mueve el pistón, del propio pistón, de las
juntas estáticas y dinámicas del pistón y del anillo rascador que limpia el vástago de
suciedad.
Los actuadores neumáticos de movimiento giratorio pueden ser: Cilindro giratorio
de pistón-cremallera–piñón y de dos pistones con dos cremalleras en los que el
movimiento lineal del pistón es transformado en un movimiento giratorio mediante

38
un conjunto de piñón y cremallera y Cilindro de aletas giratorias de doble efecto para
ángulos entre 0° y 270°.
El motor neumático típico es el de paletas donde un eje excéntrico dotado de
paletas gira a gran velocidad por el aire que llena y vacía las cámaras formadas entre
las paletas y el cuerpo del motor.
Con el fin de seleccionar el actuador más adecuado para la aplicación necesaria se
debe de tomar en cuenta las propiedades que cada actuador es capaz de proveer, a
continuación se describirán las propiedades buscadas en la selección correcta de los
cilindros.
a) Carrera. La carrera de accionamiento del actuador es la distancia
comprendida entre la posición inicial del vástago antes de ser activado y su posición
final después del accionamiento neumático.
Teniendo esto en cuenta la longitud total de un cilindro con vástago será el doble
de la carrera de accionamiento deseada, ya que en su posición inicial tanto el vástago
se encuentra dentro del cuerpo del cilindro ocupando la misma distancia
b) Fuerza del cilindro. es una función del diámetro del cilindro, de la presión del
aire y del roce del embolo, que depende de la velocidad del embolo, que se toma en el
momento de arranque. La fuerza que el aire ejerce sobre el pistón es:
Ec 1
Los cilindros de doble efecto no cuentan con un resorte para volver a su posición
de equilibrio, así su fuerza no disminuye en la carrera de avance, pero si en su carrera
de retroceso, debido a la disminución del área del embolo por la existencia del
vástago. Las expresiones matemáticas correspondientes son:
Ec 2
A esta fuerza es prudente restarle la fuerza generada por el rozamiento entre el
pistón y el cilindro en su movimiento, para presiones que oscilan entre los 4 y 8 bar

39
las fuerzas de rozamientos equivalen a valores comprendido entre el 3% y 10 % de la
fuerza calculada.
c) Consumo de aire. Es una función de la relación de compresión, del área del
pistón y de la carrera, según la fórmula:
Ec 3
Siendo:
- .
- A= área del pistón. (cm2).
- LCarrera= longitud de carrera. (cm)
- n= ciclos por minutos. (rev/min)
d) Velocidad del pistón. La velocidad del pistón se obtiene dividiendo el caudal
por la sección del pistón.
Ec 4
3.3.6.3 Accesorios para actuadores neumáticos
Debido a la gran variedad de condiciones en las cuales es necesaria la utilización
de los actuadores es necesaria la utilización de accesorios para complementar las
funciones de fábrica de los actuadores.
En la mayoría de las aplicaciones se necesita un dispositivo de detección de la
posición del cilindro para asegurar la operación segura de la maquinaria neumática.
En los casos simples basta visualizar la posición del vástago del pistón del cilindro
para comprobar si el pistón está en el principio o el final de su carrera, sin embargo
en operaciones realizadas en máquinas complejas no es practico esperar que los
operarios estén vigilantes y más si es en periodos prolongados de funcionamiento.
Para detectar la posición de un pistón en el cilindro se dispone interruptores de
posición que envían una señal de control de manera mecánica, magnética, neumática

40
o electrónica, accionados a la posición del vástago bien mecánicamente o por medio
de un campo magnético creado por un imán montado en el pistón. Estos accesorios se
montan en los cilindros para determinar la posición del final de carrera del pistón o
bien la posición en un punto intermedio de la carrera del pistón.
Otro accesorio disponible son los sistemas de posicionamiento secuencial los
cuales son usados para la lectura de la carrera cuando es necesario detectar el
movimiento del cilindro, la medida de la distancia o un movimiento secuencial exacto
del cilindro. En particular se utilizan estos sistemas cuando es necesario comprobar la
presencia o la orientación correcta de un componente, la medida de la profundidad de
un orificio o bien medir las dimensiones del componente y comprobar que estas
dimensiones son las correctas.
La unidad de bloqueo del cilindro es un accesorio que inmoviliza el vástago del
cilindro cuando la presión de aire desciende de un valor determinado. Su función es
de seguridad con objeto de impedir el movimiento del cilindro cuando la presión del
aire baja de un determinado límite. Puede actuar en el interior o exterior del cilindro y
sobre el vástago en el sentido de retracción o extensión.
3.3.6.4 Control del aire comprimido
Las válvulas son elementos que mandan o regulan la puesta en marcha, el paro y la
dirección, así como la presión del aire. Según norma DIN 24300, se subdividen en
cinco grupos:
- Válvulas distribuidoras o de vías.
- Válvulas de bloqueo.
- Válvulas de presión.
- Válvulas de caudal.
- Válvulas de cierre.
Se denomina vía a cada uno de los orificios a través de los cuales puede circular el
aire en su proceso de trabajo o evacuación en válvulas dotadas de pilotaje neumático,

41
la conexión que permite la entrada de aire para el control de la válvula no se
considera vía ya que se trata de un sistema de accionamiento.
Figura 16. Corte de una válvula 5/2 vías de accionamiento neumático
Fuente: (SMC Corporation, 2009)
El número de posiciones de maniobra de una válvula está determinado por el
número de posibilidades diferentes de comunicar las vías entre sí. Este parámetro se
representa mediante cuadrados (tantos como posiciones tenga la válvula).
Figura 17. Simbología de las posiciones de una válvula neumática
Fuente: (SMC Corporation, 2009) El número de vías es el número de orificios que la válvula presenta:
Figura 18. Simbología de las vías de una válvula neumática Fuente: (SMC Corporation, 2009)

42
Las líneas representan tuberías o conductos. Las flechas, el sentido de la
circulación. La posición de paso abierto para una válvula se representa por medio de
una flecha de un extremo a otro del cuadrado. Las posiciones de cierre dentro de las
casillas se representan mediante una línea cortada, esto simboliza la interrupción de
flujo.
Figura 19. Simbología de apertura y cierre para una válvula Fuente: (SMC Corporation, 2009)
a) Simbología.
A continuación se muestra la simbología de las principales válvulas neumáticas,
según la norma DIN 24300:

43
Figura 20. Simbología de las diferentes válvulas neumáticas Fuente: (J. Garrigos, 2008)
b) Accionamientos
Una de las características más importantes de una válvula es el modo de llevar a
cabo su cambio de posición; es decir, el sistema de accionamiento o dispositivo de
mando, estas se presentan en la figura 21.

44
Figura 21. Simbología de los diferentes tipos de accionamientos de una válvula
Fuente: (J. Garrigos, 2008)
3.3.7 Balancín neumático
Un balancín neumático o de gravedad cero se asemeja a un actuador neumático de
simple efecto, con la única diferencia de que en lugar de convertir la energía potencial
del aire comprimido en esfuerzos lineales, la aprovecha para generar esfuerzos
rotativos a través de un simple mecanismo retráctil y un cable de acero, los cuales
permiten desplazar cargas mecánicas verticalmente. Además de esto, un balancín
neumático puede equilibrar una carga en cualquier punto vertical de su trayectoria, al
anular el peso de esta con la fuerza producida por cierta presión de aire comprimido
en su pistón, razón por la cual se ha empleado en el manipulador neumático de ruedas
con la finalidad de levantar los pesos considerables de las ruedas de un camión. Un
balancín neumático es el elemento ideal a emplear en situaciones que se requieran de
esfuerzos elevados para desplazar cargas de un punto a otro con la mayor seguridad.

45
Figura 22. Balancín neumático Fuente: (Knight Global, Inc., 2012)
3.3.7.1 Principio de funcionamiento
En la figura 23 se tiene la disposición de todas las partes internas de un balancín
neumático que conforman el mecanismo retráctil de elevación de carga. Su
funcionamiento se basa en que el aire presurizado entra en la cámara del balancín
neumático a través de la toma de aire (el aire comprimido de alimentación está
regulado por un gabinete de control, el cual no se muestra en la figura). La presión
del aire empuja el pistón, y este a su vez al rodamiento de empuje, el mismo que
transfiere la fuerza al carrete que cabalga sobre un tornillo redondo estacionario. El
tornillo redondo hace que el carrete gire, enrollando el cable de acero. Cuando se
descarga el aire desde la cámara del balancín neumático, el peso de la carga hace que
el carrete gire en la dirección opuesta, de manera que facilita que el cable de acero se
desenrolle del carrete.

46
Figura 23. Partes de un balancín neumático
Fuente: (Knight Global, Inc., 2012)
3.3.7.2 Equilibrio de carga
Para conseguir que el peso de una determinada carga sea suspendido, es necesario
inundar la cámara del balancín neumático con una determinada presión de aire, que
compense la carga levantada y permita su estancamiento en cualquier posición. Esto
ocurre cuando la fuerza producida por el peso de la carga anula a la producida en el
pistón por parte de la presión de aire, dando origen a una fuerza resultante igual a
cero, por consiguiente cualquier fuerza mínima alterara el equilibrio y permitirá que
la carga se desplace hacia arriba o hacia abajo, dependiendo de la dirección en la que
se sume la fuerza desequilibrante.
Un balancín neumático está diseñado para suspender cargas, pero puede ser
empleado como un dispositivo de elevación siempre y cuando no sobrepase los
límites de carga máxima previamente establecidos. La carga máxima de trabajo de un
balancín está establecida a 100 psi (6,89 bar), en esta se puede equilibrar una carga,
mas no levantarla, ya que si 100 psi (6.89 bar) de presión del sistema no está
disponible, entonces el esfuerzo de mover la carga aumentará proporcionalmente a la
disminución en la presión del sistema

47
Figura 24. Equilibrio de carga en un balancín neumático Fuente: (Knight Global, Inc., 2012)
3.3.8 Esquemas neumáticos
Un esquema neumático es la representación técnica de un circuito neumático, que
consta de todos los elementos neumáticos detallados en este capítulo, tales como,
actuadores neumáticos, válvulas neumáticas, filtros, reguladores, lubricadores, entre
otros elementos, con la finalidad de que al interrelacionarlos entre sí desempeñen una
función específica, como por ejemplo mecanismos autónomos de producción,
manipuladores neumáticos, sistemas de control, etc. La disposición y ubicación que
estos llevan, depende principalmente de su funcionalidad así como de la participación
en un sistema de control neumático.
En la siguiente figura se muestra la ubicación de cada elemento y equipo en un
esquema neumático, de manera que para el diseño y desarrollo de un sistema de

48
control se debe tener en cuenta el orden planteado, para de esta manera hacer más
fácil su interpretación y ejecución.
Figura 25. Codificación de elementos y equipos en un esquema neumático Fuente: (Depper W. / Stoll K., 1999)
3.3.9 Consideraciones de diseño
3.3.9.1 Factores de diseño.
A veces la resistencia de un elemento en un sistema, es un asunto muy importante
para determinar la configuración geométrica y las dimensiones de dicho elemento. En
tal caso, se dice que la resistencia es un factor importante de diseño. Cuando se utiliza

49
la expresión: consideración de diseño; se está refiriendo a una característica que
influye en el diseño de un elemento, quizá, en todo el sistema.
Generalmente se tienen que tomar en cuenta varias de estos factores en un caso de
diseño determinado. (Budynas R. y Nisbett J. 2.008).
Algunos de los más importantes son los siguientes: Resistencia, confiabilidad,
propiedades térmicas, corrosión, desgaste, fricción (o rozamiento), procesamiento,
utilidad, costo, seguridad, peso, duración, ruido, estilización, forma, tamaño,
flexibilidad, control, rigidez, acabado de superficies, lubricación, mantenimiento,
volumen y responsabilidad legal.
Algunos de estos factores se refieren directamente a las dimensiones, al material,
al procesamiento o proceso de fabricación, o bien a la unión o ensamble de los
elementos del sistema. Otros se relacionan con la configuración total del sistema.
3.3.9.2 Normas y códigos
Una norma o estándar, es un conjunto de especificaciones para piezas, materiales
o procesos establecidos, con el fin de lograr uniformidad, eficiencia y calidad
especificadas. Uno de los objetos importantes de una norma es fijar un límite número
de artículos en las especificaciones, así como permitir que se tenga un inventario
razonable de herramientas, tamaños, formas y variedades.
Un código, es un conjunto de especificaciones para efectuar el análisis, el diseño,
la fabricación y la construcción de un objeto o sistema. El propósito de un código es
alcanzar un grado específico de seguridad, eficiencia y buen funcionamiento o buena
calidad. Es importante observar que, los códigos de seguridad no implican la
seguridad absoluta. De hecho esta cualidad es imposible de obtener. A veces puede
llegar a presentarse realmente el suceso más inesperado. (Budynas R. y Nisbett J.
2.008).
Por otro lado, todas las sociedades y organizaciones que se enumeran a
continuación se han establecido para formular normas y códigos de seguridad o de
diseño. El nombre de cada organismo indica la naturaleza de la norma o código

50
establecido. Algunas normas y códigos, así como las direcciones de las citadas
organizaciones, pueden obtenerse en la mayor parte de los centros de información
técnica. Las organizaciones que interesan principalmente a los ingenieros mecánicos
son:
- Asociación de Aluminio (AluminumAssociation AA).
- Asociación Americana de Fabricantes de Engranaje (American
GearManufacturersAssociation AGMA).
- Instituto Americano de Construcción de Acero (American Institute of Steel
Construction AISC).
- Instituto Americano de Hierro y de Acero (American Iron and Steel Institute
AISI).
- Sociedad Americana para Metales (American Society for Metals ASM).
- Sociedad Americana de Ingenieros Mecánicos (American Society of
Mechanical ASME).
- Sociedad Americana de Pruebas y Materiales (American Society of testing
and Materials ASTM).
- Sociedad Americana de Soldadura (American WeldingSociety AWS).
- Asociación de Fabricación de Cojinetes Antifricción (Anti-FrictionBearing
Manufactures Association AFBMA).
- Instituto Británico de Normas (British StandardsInstitute BSI).
- Instituto de Sujetadores Industriales (Industrial FastenersInstitute IFI).
- Institución de Ingenieros Mecánicos (Institution of MechanicalEngineers I.
Mech. E.).
- Oficina Internacional de Pesos y Medidas (International Bureau of Weights
and Measures BIPM).
- Organización de Normas Internacionales (International StandarsOrganization
ISO).

51
- Sociedad de Ingenieros Automotrices (Society of AutomotiveEngenieers
SAE).
- vehicle operations-structures standards (VOSS)
3.3.9.3 Factor de Seguridad.
El coeficiente de seguridad también conocido como factor de seguridad N, es un
número que se utiliza en ingeniería para los cálculos de diseño de elementos o
componentes de maquinaria, estructuras o dispositivos en general, proporcionando un
margen extra de prestaciones por encima de las mínimas estrictamente necesarias.
(Budynas R. y Nisbett J. 2.008). Así, en los cálculos de resistencia mecánica, el factor
de seguridad se aplica principalmente de dos maneras:
1. Multiplicando la dimensión del elemento resultante de los cálculos teóricos.
2. Dividiendo las propiedades favorables del material que determinan el diseño.
Es por ello que, en ambos casos, resulta en un dimensionamiento adicional del
componente. Este sobredimensionamiento se justifica por variadas causas, como por
ejemplo: previsiones de desgaste o corrosión, posibles errores o desviaciones en las
propiedades previstas de los materiales que se manejan, diferencias entre las
propiedades tabuladas y las obtenibles en la realidad, tolerancias de fabricación o
montaje, tolerancias por incertidumbre en las solicitaciones a que se someterá el
elemento, la propia incertidumbre del método de cálculo, etc. Estos factores de
seguridad por lo general provienen de la experiencia empírica o práctica, por lo cual
están tabulados y contemplados en las normas o la literatura, o bien se aplican según
la experiencia personal del diseñador.
En general para el mismo tipo de elemento dependerá del tipo de uso o servicio
que se le piense dar. Por ejemplo, para una máquina de uso continuo se usará un
factor de seguridad mayor que para una de uso esporádico.
Finalmente se puede decir que en resistencia de materiales se aplica un coeficiente
de seguridad superior o inferior dependiendo del uso del componente. Así, en el
cálculo de dimensionamiento de sección de un cable para tender la ropa se utilizara

52
un coeficiente de seguridad inferior al utilizado para ese mismo cable cuando se
estudia su empleo para sustentar un ascensor. En la tabla 1 se muestran los factores de
seguridad dependiendo del tipo de elemento que se va a diseñar.
Tabla 1. Factores de Seguridad
TIPO DE CARGA
Materiales dúctiles.
Aceros.
Materiales frágiles.
Fundición.
Madera
Nu Ny Nu Nu
Cargas muertas (Constantes) 2,6 - 4,2 1,25 - 2,0 4,5 - 6,5 6 - 8
Cargas repetidas, en una
dirección.
Choque moderado.
5 - 7 2,5 - 3,5 6,5 - 9,0 9 - 11
Cargas repetidas, invertidas.
Choque moderado 7 - 9 3,5 - 5,0 10 – 13
13 – 16
Choques fuertes 10 – 15 5 – 8 15 – 20 15 - 20
Fuente: Molina 1.970
3.3.9.4 Esfuerzos
Uno de los primeros problemas que enfrenta el ingeniero diseñador es tener la
certeza de que la resistencia de la parte que se diseñe siempre sea mayor que el
esfuerzo atribuido a cualquier carga que se le pueda aplicar. Por lo tanto se debe
diseñar tomando en cuenta este elemento para lograr un dispositivo seguro y
confiable.
a) Esfuerzos Uniformemente Distribuidos.
Con frecuencia, en diseño se plantea la hipótesis de que hay una distribución
uniforme de esfuerzo. Según (Budynas R. y Nisbett J. 2.008), el resultado obtenido
con esa suposición se le llama tensión pura, compresión pura o cortante puro,
dependiendo de cómo se aplique la carga externa al cuerpo en estudio. A veces se
emplea el calificativo simple en vez de puro, para expresar que no hay otros efectos
que compliquen la situación. Una barra en tensión es un ejemplo típico.

53
En este caso, una carga de tensión F se aplica mediante los pasadores que
atraviesan los extremos de la barra. La hipnosis de esfuerzo uniforme significa que si
corta la barra en una sección transversal, alejada de ambos extremos, y se separa una
de las mitades, es posible sustituir su efecto aplicando una fuerza uniformemente
distribuida de magnitud en el extremo cortado. Entonces se dice que el esfuerzo σ
esta uniformemente distribuido y se calcula por la siguiente ecuación:
Ec 5
Donde es la fuerza aplicada y es el área de la sección transversal. Para
justificar esta hipótesis de distribución uniforme del esfuerzo se requiere que:
1. La barra sea recta y de material homogéneo.
2. La línea de acción de la fuerza pase por el centroide de la sección.
3. La sección esté suficientemente alejada de los extremos y de cualquier
discontinuidad o cambio en la sección transversal.
b) Esfuerzos Normales por Flexión.
Para deducir las relaciones correspondientes a los esfuerzos normales por flexión
se harán las siguientes idealizaciones:
1. La viga se somete a flexión pura; esto significa que la fuerza cortante es cero y
que no hay cargas axiales ni de torsión.
2. El material es isótropo y homogéneo.
3. La viga es inicialmente recta y su sección transversal es constante en toda su
longitud.
4. La viga tiene un eje de simetría en el plano de la flexión.
5. Las dimensiones de la viga son tales que solo puede fallar por flexión y no por
aplastamiento.
6. Las secciones transversales planas permanecen así durante la flexión.

54
Figura 26. (a) Paralelepípedo sometido a un momento flector MF puro; (b) paralelepípedo afectado por el momento flector y (c) ampliación de un corte en el medio del paralelepípedo
Fuente: Tassoni D. 2.007
En la figura 26 se observa un cuerpo en forma de paralelepípedo, sometido a
flexión, por un momento flector “puro”; la pieza adquiere la forma de la fig. 26 -b,
permitiendo a sus distintas secciones transversales adyacentes, girar las unas respecto
a las otras. La figura 26-c, representa una vista ampliada de un corte en el medio de la
Fig. 26-b (sección A-A); tomamos un diferencial de área para una distancia + x en el
cual las fibras están sometidas a tracción y otro diferencial de área a una distancia – x,
en donde las fibras de la pieza están sometidas a compresión; para cada
Ec 6
Existe un
Ec 7
Para el que contribuyen los más alejados; el esfuerzo de tracción máximo
ocurre en c y el mínimo, de compresión, ocurre en –c y se tiene que:
Ec 8
En cualquier otra posición, se tiene que
Ec 9
(a) (b) (c)

55
Si integramos la ecuación 7, tenemos que la reacción interna iguala al efecto
externo:
maxi i f
A A A A
M dM xdF x dA x dA Mc
= = = = ≡σσ∫ ∫ ∫ ∫2
Ec 10
Así
maxf
A
M x dAc
= σ∫
2 Ec 11
Como A
x dA∫2
=I y es el momento de inercia de la sección transversal de la pieza,
alrededor del eje y, que pasa por su centro de gravedad, la ecuación 7 es igual a
Ec 12
c) Torsión
La torsión es una acción deformadora, producida por un momento torsor puro (par
de fuerzas) que actúa en el plano de la sección resistente del elemento de máquina,
generando en las mismas tensiones de corte (esta tensión es la tercera de los tipos que
pueden presentarse en una pieza)
Ec 12a
d) Esfuerzos Combinados.
Es muy común en piezas de maquinarias, tener combinaciones de carga que creen
esfuerzos normales y cortantes en una misma pieza. Pudiera haber lugares dentro de
la pieza donde estos esfuerzos aplicados han de combinarse para poder determinar
cuáles son los esfuerzos principales y el esfuerzo cortante máximo. ¿Cómo predecir
su condición de falla? ¿En cuál condición se presenta esta falla? Para dar respuesta a
estas preguntas, se introducen las teorías de falla las cuales son explicaciones, o

56
ensayos de explicaciones, que tratan de señalar cuando y como falla un elemento de
máquina.
La primera de estas teorías, es la teoría de la tensión normal máxima. Señala que
se presenta la falla del material y de la pieza, cuando una de las tensiones principales
es igual, o superior, al valor de la resistencia de fluencia del material del cual está
fabricada la pieza. La importancia real de esta teoría, radica en el poder hacer
comparaciones con las verdaderas condiciones de falla.
Si se considera un elemento de máquina sometido a un sistema de carga que
induce en él un estado “complejo” pero, “bidimensional” de tensiones. Por ejemplo,
un eje o árbol como el de la figura 27.
Figura 27. Eje o árbol sometido a la acción de tensiones de corte, de compresión y de tracción simultáneamente.
Fuente: Tassoni D. 2.007.
En él se tienen, tensiones de corteττττ, producto de la acción directa de las cargas P y
W y del momento torsor MT ; tensiones de tracción σσσσtrac por acción de la carga axial
Q; y de tracción σσσσtrac y compresión σσσσcomp por el efecto de las cargas transversales y
de las reacciones en los apoyos. En alguna parte de esta pieza se encuentra el punto
crítico, en ese punto de la pieza, cada elemento infinitesimal experimenta esfuerzos
distintos, al mismo tiempo. Por lo cual se deben considerar los esfuerzos como
actuando sobre elementos infinitesimalmente pequeños dentro de la pieza. Estos

57
elementos suelen modelarse, cada uno, como un cubo. Las componentes de los
esfuerzos actúan en las caras de estos cubos de dos maneras distintas. Los esfuerzos
normales (Fuerza/Área) actúan perpendicularmente a la cara del cubo (Normal) y
tienen tendencia a tirar de él (Esfuerzo de Tracción Normal) o a empujarlo (Esfuerzo
de Compresión Normal) Los esfuerzos cortantes, actúan paralelos a las caras del
cubo, en pares sobre caras opuestas, lo que hace que el cubo distorsione a forma
romboidal. Las componentes normales y cortantes del esfuerzo conforman lo que se
conoce como tensor; y un volumen elemental en ese punto, resultaría como el
indicado en la figura 28-a; en él, siempre se podrá utilizar un análisis de cuerpo libre
en el cual, para un ángulo cualquiera con los ejes indicados, se obtenga la
representación de las tensiones directas máximas (fig. 28-b). Esto significa que se
puede ir variando el ángulo de corteθθθθ, hasta conseguir el valor de las tensiones
principales σσσσ y ττττ máximos. A todas luces un procedimiento como el indicado,
resultaría sumamente engorroso y extremadamente largo. Afortunadamente, el círculo
de MOHR (Otto Mohr, en el año 1.880 en sus clases de la Universidad de Berlín
explicó por primera vez este método gráfico). En efecto, este método gráfico,
denominado círculo de Mohr, se constituye en una herramienta valiosa a la hora de
tener que enfrentar a un análisis como el que aquí se ha planteado.
Si se toma el caso del elemento considerado en la figura 28, y suponiendo que en
el mismo se tiene que σσσσx >σσσσy; se puede construir el diagrama del circulo de Mohr para
este caso; sobre el eje σσσσ se reporta el valor de σσσσx. Sobre el mismo eje se señala la
magnitud de σσσσy correspondiente; sobre el eje ττττ se indican las tensiones de corte, ττττx = -
ττττy (por equilibrio). Se unen los puntos obtenidos en las intersecciones de σσσσx con ττττx, y,
de σσσσy con ττττy, es decir, se unen los puntos (σσσσx,ττττx) y (σσσσy,ττττy) y se obtiene el diámetro del
círculo, el cual corta al eje σσσσen el punto c de la figura 28. Siguiendo la nomenclatura
de la figura 29, se pueden indicar los valores numéricos de las magnitudes utilizadas
en dicha figura:

58
Figura 28.Volumen Elemental de una pieza cualquiera, sometida a un estado bidimensional de
tensiones, (b) análisis de cuerpo libre del mismo Volumen Elemental. Fuente: Tassoni D. 2.007.
2x y σ σ
A−−−−
====
El Radio del círculo es igual a:
2 2xR A τ= += += += +
Pero el radio del círculo, del estado bidimensional de tensiones considerado, no es
más que la máxima tensión de corte producida, por lo tanto
2
2
2x y
max x
σ στ τ
−−−− = ± += ± += ± += ± +
Ec 13
Designando, ahora, al segmento O C de la figura 91 por la letra B se puede
escribir
B=σσσσx–A=2 2
x y x yx
σ σ σ σσ
− +− +− +− +− =− =− =− =
De esta última expresión y considerando la geometría de la figura 21, resulta
σσσσ1 = B + R y σσσσ2 = B – R

59
Figura 29. Diagrama del círculo de Mohr
Fuente: Tassoni D. 2.007.
σσσσ1= 2x yσ σ++++
2
2
2x y
x
σ στ
−−−− + ++ ++ ++ +
Ec 14
σσσσ2= 2x yσ σ++++
2
2
2x y
x
σ στ
−−−− − +− +− +− +
Ec 15
Gracias a las ecuaciones (13), (14), (15) y (15a) se pueden obtener valores de las
tensiones principales ττττmax,σσσσ1 y σσσσ2, en el estado bidimensional de tensiones, a partir de
las tensiones directas ττττx, σσσσx y σσσσy.
Pero atención con ττττmax porque para el estado bidimensional de tensiones (o plano)
analizado anteriormente lo que realmente está ocurriendo es lo siguiente:
El volumen de control es (con σσσσx, σσσσy, σσσσz =0 y τx = τy) tal y como se observa en la
figura 30
ττττMÁX 22131 σσσ
=−
= Ec 16
En un elemento de máquina cualquiera, en el cual se presente un estado genérico
tridimensional de tensiones, con σσσσ1 >σσσσ2>σσσσ3>0. El círculo de Mohr resultante es como

60
el representado en la figura 30, en la cual se indican las tensiones principales que
actúan sobre dicho elemento.
Figura 30. Construcción del Círculo de Mohr “resultante”, para un elemento de
máquina sometido a un estado tridimensional de tensiones. Fuente: Tassoni D. 2.007.
Como puede observarse por los valores particulares asignados a las tensiones
principales indicadas, la máxima tensión de corte se obtiene relacionando σσσσ1 con σσσσ3.
Cada una de las tensiones principales debe obtenerse a partir de un diagrama en el
cual se consideren, dos a dos, las tensiones directas actuantes, de cada uno de ellos, el
valor de las tensiones principales, para luego ser analizadas en conjunto tal y como se
indica en la figura 30.
e) Teorías de falla.
Ahora que se sabe, como poner en evidencia la existencia de las tensiones
máximas, tensiones principales, se deben relacionar con las posibilidades de falla (la
pieza no cumpliría con la finalidad requerida para su funcionamiento) del elemento
de máquina estudiado, con el objetivo de evitar que su falla se presente. Para ello se
han formulado teorías, distintas a la expuesta al principio (conocida como de tensión
normal máxima, la cual se utiliza comparando directamente σσσσ ≤ SY y ττττ ≤ Sycorte,
propuesta por W.J.M. Rankine en 1.845), que se acercan definitivamente más a la
predicción acertada de las condiciones de falla de un elemento de máquina, que esa
primera teoría, quedando está “primera teoría solamente para materiales frágiles”.
Veamos, a continuación, algunas de las más importantes y más utilizadas en el diseño
de piezas.

61
i) Tresca: Teoría de Tensión de Corte Máxima.
Se considera que está es la teoría de falla más antigua. Originalmente fue
propuesta por el francés C. A. Coulomb (1.736-1.806). Tresca, en 1.864 escribió
acerca de la teoría del esfuerzo cortante máximo, y J.J.Guest en Inglaterra realizó
ensayos en el año 1.900, que condujeron a la aceptación de la teoría. Así como se
obtuvo σ1 y σ2 para un estado bidimensional de tensiones, se puede obtener, para un
estado más complejo de tensiones, tal como es el tridimensional, los siguientes
valores:
ττττ1 2,
2,
231
332
221 σσσσσσσσττττ
σσσσσσσσττττσσσσσσσσ −
=−
=−=
Ec 17
La falla iniciará cuando la tensión mayor de corte entre los tres valores de ττττi (sea
ésta ττττi.MAX ) representados en las ecuaciones 17, se iguala a la mitad del valor de la
resistencia a la fluencia del material de fabricación de la pieza, obtenido en un ensayo
de tracción simple. Esto es
Ec 18
La teoría de la tensión de corte máxima, indica igualmente que el límite de
fluencia a corte Sycorte de un material es, a lo sumo, igual a la mitad de su límite de
fluencia a tracción Sy, esto es,
Ec 19
Esta teoría ofrece buenos resultados en el diseño de elementos de máquina, para
cuya fabricación se utilizarán materiales dúctiles (latones, bronces, aluminio y aceros
laminados y recocidos).
ii) Von Mises – Hencky.
También denominada, teoría de la energía de corte o teoría de la energía de
distorsión.
En 1.904, en Polonia, M. T. Hueber escribió por primera vez sobre la energía de la
máxima distorsión; pero, fueron R. von Mises (Alemania y USA) en 1.913 y H.

62
Hencky (Alemania y USA) en 1.925 quienes más contribuyeron a ella.
Recientemente,
S. Timoshenko, en su History of Strength of Materials McGraw-Hill, Nueva York,
1.953, ha atribuido esta teoría a J. C. Maxwell de Inglaterra, que la plantea en 1.856.
Esta teoría sostiene que cualquier pieza esforzada en forma elástica sufre un (ligero)
cambio en forma, volumen o en ambos, pero no en tamaño. La energía necesaria para
producir este cambio se almacena en forma de energía elástica. Por lo tanto, un
determinado material tiene una capacidad limitada y definida de energía de distorsión
o de corte, y por lo tanto cualquier intento por someter al material a cantidades
mayores de energía de distorsión, provocaría la falla del elemento, La forma más
corrientemente utilizada para expresar la teoría de la energía de distorsión, es
2 2 2 21 2 2 3 3 1 2 y(σ σ ) (σ σ ) (σ σ ) S− + − + − =− + − + − =− + − + − =− + − + − = Ec 20
Interpretando lo indicado en la ecuación 20, esta teoría establece que el inicio de la
condición de falla es, únicamente, función de las diferencias de Tensiones
Principales, independientemente de sus valores absolutos particulares.
Para un estado bidimensional de tensiones, condición para la cual σσσσ3 = 0, la
ecuación 20 se convierte en
2S2y = (σσσσ1 - σσσσ2)
2 + σσσσ22 + σσσσ2
1
2S2y = σσσσ2
1 + σσσσ22 - 2σσσσ1σσσσ2 + σσσσ2
1 + σσσσ22 = 2σσσσ2
1 + 2 σσσσ22 - 2σσσσ1σσσσ2
S2y = σσσσ2
1 + σσσσ22 - σσσσ1σσσσ2 Ec 21
O simplemente
Ec 22
La ecuación 22 permite aplicar, en el caso de un estado bidimensional de tensiones
como el indicado, la teoría de la ENERGÍA DE CORTE o teoría de la ENERGÍA DE
DISTORSIÓN o Teoría de von MISES – HENCKY, sin necesidad de recurrir al

63
círculo de Mohr, pues en ella se pueden utilizar las tensiones directas, σσσσx, σσσσy y ττττ
presentes en el estado bidimensional de tensiones aplicado al elemento de máquina.
Según esta teoría, cuando el sistema de carga que actúa sobre el elemento de
máquina produce tensiones de TORSIÓN PURA (tensiones de corte; σσσσx = σσσσy= 0),
de (22) se obtiene que la falla del material y por ende de la pieza, se inicia cuando se
alcanza
Ec 23
3.3.9.5 Análisis de piezas largas sometidas a compresión.
Existen elementos de máquina, que no fallan cuando la tensión resultante aplicada
se acerca a los valores de resistencia del material, sino mucho antes... ¿A qué se debe
este comportamiento? El mismo obedece a la existencia de un llamado equilibrio
inestable. Un ejemplo típico de lo que aquí se dice, son las columnas. No se piense
que se refiere únicamente a las columnas de un edificio... Muchos elementos de
máquina se comportan como si fueran columnas, sin... serlo. Algunos ejemplos que
se pueden citar son: la BIELA de un motor de combustión interna, el soporte central
del tren de aterrizaje de un avión, el vástago del émbolo de un cilindro hidráulico, etc.
Considerando, por ejemplo, los dos elementos que se indican en la figura 31 ¿Cuál es
el más crítico? La respuesta a esta pregunta, resulta demasiado evidente: sin pensar
siquiera en la sección, o en la dimensión de la sección transversal del elemento, todos
concuerdan en afirmar que el más crítico es el más largo, en este caso el de la figura
31.b.

64
Figura 31. Elementos de Máquina de igual sección transversal, e idénticos sistemas de carga; difieren únicamente en cuanto a las correspondientes longitudes.
Fuente: Tassoni D. 2.007
Para visualizar mejor esta situación, imagine una regla de plástico como las que se
utilizan para medir en dibujo (o la antena de un carro), a la cual se le aplica una carga
P de compresión axial (con la mano si hacer mucha fuerza), se observa que la regla(o
la antena) se arquea (dobla) como, es decir, la pieza ha pandeado; el pandeo no es la
curvatura sino la falla, sin quitar la carga P. Si se quita la carga P, la regla (o la
antena) se endereza, ¿Por qué? Un pequeño desplazamiento lateral, producto de la
deformación mostrada, genera una reacción interna que se opone a P, debido a un
“momento elástico interno”. Al desaparecer P, este momento es suficiente para que la
pieza recobre su forma recta, esto se denominó “estabilidad elástica”. La primera vez
que se escuchó este término fue en el año 1.744, en un tratado de Leonhard Euler
(1.707-1.783), matemático, físico e ingeniero que paso largos años para tratar de
explicar este problema, ya que la estabilidad elástica solo explica cuando la pieza se
endereza, el verdadero problema es explicar cuando la pieza llegará a la
“ inestabilidad elástica o geométrica”, es decir, cuando el momento elástico interno
ya no es capaz de contrarrestar el efecto de P, ¿y qué ocurre? Pues, la pieza falla
(cede) abruptamente y se produce el colapso.
Cómo dar respuesta a este problema?... Euler, poco antes de morir, en 1.780,
completó su largo trabajo, con la propuesta que lleva su nombre, analizando la forma

65
de una columna sometida a carga axial, como la representada en la figura 31
desarrolló la ecuación
Ec 24
Esta expresión es conocida como la “fórmula de EULER”, para columnas con
extremos libres de girar, en la cual se tienen las siguientes magnitudes:
= Módulo de Elasticidad del material que conforma la pieza [Pa]
= Inercia de la sección transversal de la pieza [m4]
= longitud de la pieza [ m]
El subíndice cr que se asocia a la carga P, indica el carácter crítico de la carga de
compresión aplicada, la cual es la carga que lleva a la pieza a la inestabilidad elástica,
en el instante de la falla.
Otra utilización sencilla que permite realizar la ecuación de Euler, consiste
en aplicar directamente la LONGITUD DE PANDEO, sustituyéndola en la ecuación
24, a la longitud del elemento con extremos libres de girar. La longitud de pandeo
depende de la fijación de los extremos de la columna.
Figura 32. Representación de un elemento de máquina largo, con un extremo libre de girar, y el
otro guiado, sometido a compresión, o ambos libres de girar sometido a una carga axial F de compresión (la deformación del elemento ha sido magnificada).

66
Fuente: Tassoni D. 2.007
Un ejemplo de esta aplicación se presenta a continuación considerando la pieza de
la figura 33, que es la representación de una pieza larga, con un extremo libre y el
otro empotrado. Si observamos la forma que adopta la pieza sometida a compresión,
se ve la similitud con la representada en la figura 32; la pieza de la figura 33 adopta
la forma de la mitad superior de la indicada en la figura 32; prolongando idealmente
la forma de la pieza con un extremo empotrado y el otro libre, como se indica en
trazos negros en la figura 33 .Se obtiene la misma de la pieza con ambos extremos
libres; pero esto ocurre para un elemento "ficticio" cuya longitud total es, en este
caso, el doble de la altura del original. Para este elemento se tiene entonces que su
longitud de pandeo LP es 2h. Haciendo esta sustitución en la ecuación 24 se obtiene.
Figura 33. Elemento de Máquina, con un extremo empotrado y el otro libre, sometido a una carga axial F de compresión.
Fuente: Tassoni D. 2.007
Ec 25
Que para la pieza de la figura 33 es entonces
Ec 25a

67
Si se analiza la geometría que adoptan distintas piezas largas, sometidas a
compresión, en función de la manera de fijación de sus extremos, se puede tratar de
generalizar esta posibilidad que brinda la ecuación de Euler. Observando, para ello, la
figura 34; en 34.a se tiene una pieza con ambos extremos empotrados:
geométricamente se obtiene que su longitud de pandeo LP es igual a h / 2; para esta
pieza la ecuación 25 resulta
Ec 25b
La pieza representada en la figura 34-b, posee un extremo empotrado y el otro
libre de desplazarse verticalmente; nuevamente en forma geométrica se obtiene una
longitud de pandeo LP igual a 0,707 h; la ecuación 25 es:
Considerando las ecuaciónes 24; 25; 25a; 25b; 25c y los casos para los cuales son
válidas, se puede escribir la ecuación de Euler como
Ec 26
Ec 25c
Figura 34Representación de elementos de máquina largos, sometidos a la carga axial de compresión de compresión F; (a) elemento con ambos
extremos empotrados; (b) elemento con un extremo empotrado y el otro guiado.
Fuente: Tassoni D. 2.007.

68
En la ecuación 26, es el factor de fijación de extremos, y para los casos
presentados se tienen los siguientes valores
Con extremos libres de girar (caso de la Fig. 32).
Con un extremo empotrado y el otro libre (caso de la Fig. 33).
Con un extremo empotrado y el otro libre de desplazarse verticalmente
(guiado). (Caso de la Fig. 34-b).
Con extremos empotrados (caso de la Fig. 34-a).
Como se debe diseñar elementos de máquina, se considera la falla, es decir, se
añade un factor de seguridad y , siendo la carga que debe soportar la
pieza.
El coeficiente de esbeltez nos indica si determinado elemento de máquina, que
será sometido a tensiones de compresión, podrá ser considerado como una pieza corta
o larga; es decir aún no sabemos si elemento fallara por fluencia o si se presentara el
posible equilibrio inestable.
Ec 27
Este es el valor del coeficiente de esbeltez para el cual, las parábolas de Euler y de
Johnson, son tangente, es decir, ambos criterios son válidos

69
. Figura 35. Representación gráfica de los criterios de Euler y de Johnson
Fuente: Tassoni D. 2.007.
La parábola de Johnson describe la fuerza crítica como:
Ec 28
3.3.10 Soldadura a tope.
Este tipo de soldadura se utiliza en casos de tensiones de tracción o de compresión:
la figura 36 señala algunas de las formas típicas de esta soldadura.
i) Para el caso más general de soldadura a tope sometida a tensiones de tracción o
de compresión, se considera el caso representado en la figura 37 en el cual se señala
la existencia de cargas de tracción; se puede realizar un estudio análogo, para cargas
de compresión. Para el sistema de cargas indicado en la figura 37 se obtiene una
tensión aplicada dada por la expresión
σ=PA
Ec 29
Para este cálculo es necesario determinar el valor real del área A, el cual estará
determinado por el espesor de garganta que se tomara, en este caso, como el espesor

70
más delgado de las láminas (en la fig. 37 esp.< ESP.) multiplicado por la longitud
efectiva del cordón de soldadura Le: para este caso, y para todos los casos que se
consideren en adelante, esta longitud efectiva del cordón de soldadura será el
expresado por:
Le = L – [n (esp.)] Ec
30
Figura 36. Soldaduras a Tope, sometidas a tracción o compresión: (a) tope con
extremos rectos; (b) bisel a 60º; (c) doble bisel a 60º; (d) bisel simple a 45º. Fuente: Tassoni D. 2.007

71
Figura 37. Soldadura a tope, de dos láminas de distinto espesor, sometidas a
tracción (ESP. >Esp.) Fuente: Tassoni D. 2.007
En la ecuación 30, el valor de la variable n es el número de extremos en la
soldadura.
La tensión presente en un cordón de soldadura como el considerado en la figura
37, sometido a tracción o a compresión, es la indicada en la expresión
σ = ±( .)e
P
L esp Ec
31
3.3.11 Centro de gravedad y centroide
a) Centro de gravedad, es un concepto físico que tiene que ver con la ubicación
de un punto determinado en el cual un cuerpo se conservaría en equilibrio, cuando
actúa sobre él un campo gravitacional. Evidentemente este punto depende de varios
factores y por ende podría cambiar de posición en determinadas circunstancias.
En otras palabras, el centro de gravedad de un cuerpo es el punto respecto al cual
las fuerzas que la gravedad ejerce sobre los diferentes puntos materiales que
constituyen el cuerpo producen un momento resultante nulo.
De manera general si la gravedad, es constante, se puede calcular de la siguiente
manera:
Ec 32

72
Ec 33
Ec 34
En donde:
= Suma de momentos con respecto al eje X
= Suma de momentos con respecto al eje Y.
= Suma de momentos con respecto al eje Z.
= Ubicación del centro de gravedad en el eje X.
= Ubicación del centro de gravedad en el eje Y.
= Ubicación del centro de gravedad en el eje Z.
m = masa.
Figura 38. Centro de masa
Fuente: (Salazar, 2012)
a) Centroide, es un concepto geométrico que aplica sobre cualquier figura lineal,
plana o sólida. Solamente tiene que ver con su forma, por lo cual es inalterable. En el

73
caso de una esfera, el centroide siempre estará exactamente en el centro geométrico
de la misma.
Ec 35
Ec 36
Ec 37
En donde:
= área debajo del volumen respecto al eje X
= área debajo del volumen respecto al eje Y.
= área debajo del volumen respecto al eje Z.
= Ubicación del centroide en el eje X.
= Ubicación del centroide en el eje Y.
= Ubicación del centroide en el eje Z.
= volumen del cuerpo.

74
Figura 39. Centroide
Fuente: (Salazar, 2012)

75
CAPÍTULO IV
FASES METODOLOGICA
4.1 Fases Metodológicas
Fase I. Diagnóstico de la situación actual en la estación de montaje de estribos de
camiones cargo 816 en la empresa Ford Motor de Venezuela S.A. Esta fase
permitirá determinar las debilidades, visualizando cuales son los problemas que
existen y que los está afectando, para así analizarlos con mayor profundidad; se irán
implementando técnicas de recolección de datos como la observación directa y la
entrevista, a la muestra seleccionada. Según Arias (1999).
Las técnicas de recolección de datos son las distintas formas o maneras de
obtener la información. Son ejemplos de técnicas; la observación directa,
la encuesta En sus dos modalidades (entrevista o cuestionario), el análisis
documental, análisis de contenido, también define que los instrumentos
son los medios materiales que se emplean para recoger y Almacenar la
información. (p 25).
Se utilizaran estos instrumentos ya que se considera, son las técnicas más
apropiadas para recolectar los datos requeridos, la observación directa permitirá
observar atentamente el fenómeno, hecho o caso, tomar información y registrar para
su posterior análisis, por otra parte, la entrevista mostrara una serie de preguntas
dicotómicas y preguntas abiertas para así, obtener resultados puntuales.
Así mismo, la población está constituida por un conjunto de elementos o datos que
presentan características comunes o muy parecidas; o como la cita de Arias (1999)
“La población o universo se refiere al conjunto para el cual serán válidas la
conclusiones que se obtengan: a los elementos o unidades (personas, Instituciones o
cosas) involucradas en la investigación.” (p 22).

76
En tal sentido la población estará conformada por todos los trabajadores que
integran la estación de montaje de estribos de camiones cargo 816 en la empresa
Ford Motor de Venezuela S.A. ubicada en la urbanización industrial el bosque,
Valencia. El número de trabajadores que pertenecen a esta estación totalizan ocho (8)
los cuales desarrollan los siguientes cargos 1 supervisor de la línea, 1 líder de grupo y
6 obreros que realizan operaciones de montaje.
Por otra parte, la muestra es definida como un subgrupo de la población y para
seleccionar la muestra deben delimitarse las características de la población según
Arias (1999) “La muestra es un "subconjunto representativo de un universo o
población." (p 22).
Como anteriormente se mencionó, el universo de estudio de esta investigación,
está integrado por ocho (8) personas. Dada a que la población es pequeña se tomaran
como unidades de estudio e indagación a todos los individuaos que la integra. Por
consiguiente, en esta investigación de carácter organizacional, no se aplicara criterios
muéstrales, a objeto de extraer una muestra reducida del universo, y extender la
indagación a esta parte elegida de la población, para posteriormente efectuar la
conclusión o generalización en el universo estudiado.
Fase II. Revisar las posibles variables a modificar en la estación de montaje de
estribos de camiones cargo 816 en la empresa Ford Motor de Venezuela S.A. En
esta fase metodológica se examinara a fondo que variables referentes a disergonómia
e inseguridad se pueden modificar mediante el diseño y construcción de un asistente
manipulador para el montaje de estribos en los camiones cargo 816. Ford Motor
Company (2015). Señala que el manual Vehicle operations structures standards
(VOSS), son “un conjunto de requerimientos que deben cumplir todos los diseños y
equipos con respecto a fiabilidad, mantenibilidad, ergonomía y seguridad” p (4).
Así mismo, la implantación del manual VOSS servirá de base para enlazar los
datos previos del estudio, este análisis se hará a través de los instrumentos de
recolección de información, específicamente de la observación directa y la entrevista,

77
puesto que a través de las misma se facilita la generación de ideas de la población
objeto de estudio permitiéndole que al final se alcancen conclusiones sobre el
problema.
Fase III. Diseñar un asistente de manipulación para el montaje de estribos en
los camiones cargos 816 que cumpla con los estándares de ergonomía y
seguridad. Esta fase consistirá en desarrollar el diseño de un asistente de
manipulación de estribos teniendo como base los resultados de las evaluaciones de
los puestos de trabajos en estudio que será obtenido por medio de la comparación
entre la investigación de campo y los datos recogidos por las técnicas realizadas, lo
que permitirá conocer y determinar donde se encuentra las fallas que demanda la
aplicación de dicho asistente de manipulación. Por ello se consideraran las bases
teóricas desarrolladas, tomando en cuenta la constante evaluación que va a la par del
proceso de investigación.
Fase IV. Evaluar la factibilidad técnica y económica del proyecto propuesto. En
esta fase se evaluara si la solución propuesta, tiene las capacidades técnicas
requeridas por la empresa, corroborando que el personal posea el conocimiento de
cómo es la manera correcta de operar el asistente de manipulación de para el montaje
de estribos en los camiones cargos 816.
Así mismo, se analizaran el costo que se producirá al fabricar el diseño de la
propuesta con la intención de que la organización contemple dentro de sus planes de
inversión y establezca las prioridades correspondientes

78
CAPÍTULO V
RESULTADOS
En este proyecto de pasantías se plantearon una serie de fases, las cuales ayudaron
en la determinación del plan a seguir para la conclusión del mismo. A continuación se
expresan los datos encontrados en cada una de las fases planteadas.
5.1 Diagnóstico de la situación actual en la estación de montaje de estribos de
camiones cargo 816 en la empresa Ford Motor de Venezuela S.A.
Al observar el proceso de montaje de estribo en los camiones cargo 816 dentro de
la ensambladora de vehículos Ford Motor de Venezuela S.A., se logró determinar los
factores de disergonómia e inseguridad que suscitan en el momento que se realiza
dicho proceso. Se realizó una reunión con el departamento de mantenimiento y los
operadores encargados con el fin de recolectar información sobre los problemas que
se les presenta a la hora de montar los estribos, Luego se visitó el área de línea final
camiones; específicamente en la estación de montaje de estribos, y se realizó una
observación directa sobre el montaje del mismo en los camiones cargo 816 para así
percibir los factores disergonómicos e inseguros. Como se explicó en el capítulo II el
proceso de montaje de estribos en los camiones cargo 816 en la actualidad es de
manera manual, es decir, los operarios de cada lado del camión toman los estribos
con las manos de los rack(estante) ubicados en la estación, luego lo trasladan tres
metros hasta llegar a la cabina del camión, la cual se encuentra montada sobre la línea
de producción, en este punto los operarios posicionan el estribo en la parte baja de la
puerta del camión e insertan los pernos, ajustándolo luego con pistolas neumáticas.
Tal y como se mencionó anteriormente, los estribos inicialmente se encuentran
ubicados en un rack (estante) el cual se localiza en las estaciones de “Montaje de
estribo Izquierdo” y “montaje de estribo derecho”, estos se muestran en la figura 40.

79
Figura 40. (a) Estribos Izquierdo Montado en el rack; (b) Estribos Derecho Montado en el rack.
Fuente: Gonzalez L. (2015)
Aquí ya se presenta la primera falla, ya que como se explicó, los operarios tienen
que trasladar los estribos desde el rack (estante) hasta la posición de montaje que son
aproximadamente unos tres metros de distancia. Esta actividad de levantamiento y
porte son operaciones repetitivas y por ende físicamente agotadoras, y el riesgo de
accidente es permanente, en particular de enfermedades y lesiones como las que se
mencionan en el Apéndice G.
Otra de las fallas que presenta el proceso es aquella que se observa al momento de
ubicar los estribos en la parte inferior de las puertas de los camiones cargo 816, dado
que el área para la realizar dicha operación es muy reducida, esto trae como
consecuencia que las dos personas destinadas a montar los estribos se incomoden
para realizar su trabajo, además de sufrir de mala postura. Como se muestra a
continuación.

80
Figura 41. (a) Momento en que los operarios han recogido el estribo del rack y se preparan a montarlo; (b) Momento en que los operarios empiezan a cuadrar el estribó para su posterior
ajuste Fuente: Gonzalez L. (2015)
Figura 42. (a) Momento en que los operarios se encuentran colocando los pernos para su
posterior ajuste; (b) Momento en que los operarios empiezan a ajustar los pernos con una pistola neumática
Fuente: Gonzalez L. (2015)
5.2 Revisar las posibles variables a modificar en la estación de montaje de
estribos de camiones cargo 816 en la empresa Ford Motor de Venezuela S.A.
Luego de haber observado el proceso de montaje de estribos en los camiones
cargo 816, como se realiza y las fallas que se presentan en algunas de sus actividades,
se pudo establecer cuáles eran las variables a modificar para optimizar el proceso.

81
Para las mejoras del proceso se buscan los puntos claves de dicho proceso para
rediseñarlos o sustituirlos. Luego de un estudio en conjunto con los departamentos de
mantenimiento, departamento de logística y materiales (MP&L) y el departamento de
Vehicule Operation Manufacturing Engineer (VOME), basado en la factibilidad para
la empresa, se pudo concluir que la variable a modificar es: la manera de trasladar y
cuadrar los estribos en la cabina del camión cargo 816. De tal manera que se reduzcan
los riesgos de disergonómia y seguridad en los operarios.
5.2.1 Criterios para el diseño de posibles soluciones
Antes de generar las posibles soluciones para mejorar el proceso de montaje de
estribos en los camiones cargo 816 es necesario conocer las constantes que se
presentan en dicho proceso y la función principal de la solución.
5.2.1.1 Constantes en el proceso
Figura 43. Estribo izquierdo de camión cargo 816. Fuente: Ford Motor de Venezuela S.A.
En la figura 43 se enumeran las partes básicas que contiene un estribo de camión
cargo 816 las cuales son:
- 1 Cubierta lateral del estribo.

82
- 2 Guardafango.
- 3 Posapie.
- 4 Cubierta delantera del estribo.
En el anexo A se muestran de manera detallada las dimensiones de las partes
mencionadas.
5.2.1.2 Función principal de la solución
Montar el estribo en los camiones cargo 816 con el menor riesgo disergonómico e
inseguro así como también evitando la incomodidad de los operarios a la hora de
montar el mismo.
5.2.2 Propuestas de soluciones
Una vez establecidas las constantes del proceso y la función principal de la
solución y gracias a la ayuda de los departamentos de mantenimiento, logística y
materiales (MP&L), el departamento de Vehicule Operation Manufacturing Engineer
(VOME), operadores de la estación de montaje de estribo y mecánicos de la empresa,
fue factible generar las posibles soluciones para solventar el problema.
5.2.2.1 Propuestas de soluciones para el montaje de estribos en los camiones cargo
816
� Propuesta 1: Montaje de estribos con la cabina inclinada (PS1)

83
Figura 44. Secuencia de la propuesta 1
Fuente: Ford Motor de Venezuela S.A Funcionamiento del dispositivo
Los operadores (1) y (2) toman los estribos de la rack conjuntamente por la parte
inferior y superior respectivamente, ambos se mueven hacia la cabina del camión (3)
la cual se encuentra inclinada unos 45° con respecto al suelo, el operador (2) inclina
la parte superior del estribo (4) aproximadamente a la misma inclinación de la cabina
y empieza a sentarse con la espalda recta en la rueda (5) del camión cargo 816, por
otra parte el operador (1) sostiene la parte inferior del estribos (4) con las rodillas
inclinadas y la espalda recta, ambos comienza a posicionar el estribos (4) con la
cabina del camión (3) para posteriormente colocar los pernos y ajustar.
� Propuesta 2: Asistente de manipulación de estribos de camiones Cargo
816 con sujeción por pinzas neumático (PS2)

84
Figura 45. Asistente de manipulación de estribo de camiones cargo 816 (PS2)
Fuente: Gonzalez L. (2015)

85
Figura 46. Agarre del estribo por la PS2
Fuente: Gonzalez L. (2015) Funcionamiento del dispositivo
El operador toman el asistente de manipulación (1) por el manubrio (2) el cual
posee los mandos neumáticos (3) y (4) que controla las efector final(6) y el balancín
neumático (7); luego mueve el asistente de manipulación (1) hasta el rack donde se
encuentran los estribos de camión cargo 816 (5), en esta posición el operario empieza
a posicionar el asistente de manipulación (1) con el estribo (5) por medio del balancín
(7) que se controla presionando los pulsadores subir (12) y bajar (13) del mando (4),
ya posicionado el operador presiona simultáneamente los pulsadores abrir (9) del
mando (3) y común (11) del mando (4) para que así se abran las pinzas neumáticas
(6), en el momento que dichas pinzas abran por completo el operario las inserta en la
parte del estribo (8) para posteriormente presionar simultáneamente los pulsadores
cerrar (10) del mando (3) y común (11) del mando (4), cuando las pinzas neumáticas
(6) sujeta correctamente la parte del estribo (8) el operador presiona el pulsador subir

86
(12) y trasladara el estribo (5) hacia la línea de producción donde se encuentra el
camión cargo 816, finalmente posicionan el estribo (5) en la parte baja de la cabina
del camión para colocar los pernos y soltar el estribos (5) con los pulsadores abrir (9)
del mando (3) y común (11) del mando (4).
� Propuesta 3: Asistente de manipulación de estribos de camiones Cargo
816 con sujeción por ventosas (PS3)
Figura 47. Asistente de manipulación de estribo de camiones cargo 816 (PS3) Fuente: Gonzalez L. (2015)

87
Figura 48. Agarre del estribo por la PS3
Fuente: Gonzalez L. (2015) Funcionamiento del dispositivo
El operador toma el asistente de manipulación (1) por el manubrio (2) el cual
posee los mandos neumáticos (3) y (4) que controla el efector final (6) y el balancín
neumático (7); luego mueve el asistente de manipulación (1) hasta el rack donde se
encuentran los estribos de camión cargo 816 (5), en esta posición el operario empieza
a posicionar el asistente de manipulación (1) con el estribo (5) por medio del balancín
(7) que se controla presionando los pulsadores subir (14) y bajar (15) del mando (4),
ya posicionado el operador presiona simultáneamente los pulsadores succionar (11)
del mando (3) y común (13) del mando (4) para que se empiece a generar el efecto de
succión en las ventosas (17) y (18), en este momento el operario inserta la ventosa
horizontal (17) en la parte del estribo (8), la ventosa vertical (18) en la parte del
estribo (10) y la paleta de soporte en la parte del estribo (9), posteriormente el
operador presiona el pulsador subir (14) y trasladara el estribo (5) hacia la línea de
producción donde se encuentra el camión cargo 816, finalmente posicionan el estribo
(5) en la parte baja de la cabina del camión para colocar los pernos y soltar el estribos
(5) con los pulsadores soltar (12) del mando (3) y común (13) del mando (4).

88
5.2.3 Criterios de evaluación y escogencia de la propuesta
A continuación una lista de criterios y de restricciones, los cuales se deben tomar
en cuenta para el diseño de los nuevos dispositivos, que buscaran:
-Eliminar las formulaciones que se alejen de la definición operativa del problema
de diseño mecánico.
-Seleccionar la propuesta más adecuada para solventar la situación problemática.
5.2.3.1 Lista de criterios y restricciones para base de sensores.
o Lista de restricciones:
• Debe ser un dispositivo mecánico .(R1)
• Dispositivo de fácil uso.(R2)
• Edad del usuario entre 18 y 40 años.(R3)
• La altura no debe exceder los 100 cm.(R4)
• El ancho no debe exceder los 40 cm.(R5)
• Libertad de movimiento al desplazarse y girar.( R6)
o Lista de Criterios
• Mayor grado de innovación.(C1)
• Menor costo de fabricación. (C2)
• Mayor facilidad de construcción.(C3)
• Menor tiempo de fabricación.(C4)
• Menor mantenimiento.(C5)
• Mejores cualidades estéticas.(C6)
• La mayoría de sus parte deben encontrarse dentro de la planta.(C7)
• Mayores cualidades para disminuir los riesgos disergonómicos e inseguros.
(C8)
Aplicación de restricciones a posibles soluciones:
Como primer método tenemos la aplicación de restricciones a las probables
soluciones, lo cual consiste en eliminar las posibles soluciones que no satisfagan estas

89
restricciones como se puede observar en la tabla 2 a continuación:
Tabla 2: Aplicación de restricciones PS1 PS2 PS3
R1 NO SI SI
R2 SI SI
R3 SI SI
R4 SI SI
R5 SI SI
R6 SI SI
Fuente: Gonzalez L. (2015)
Según los resultados arrojados por la tabla de restricciones PS2 y PS3, se
convierten en soluciones S1 y S2, ahora para determinar cuál de las dos es más
apropiadas para resolver el problema, se procede a la ponderación de criterios la cual
consiste en darle un valor numérico a cada criterio, evaluando la importancia de los
mismos al compararlos entre sí, permitiendo conocer el criterio de mayor
importancia, lo cual se puede observar en la tabla 3:
Tabla 3: Ponderación de criterios C1 C2 C3 C4 C5 C6 C7 C8 Número de
Veces PCX
C1 1 2
C2 C2 4 5
C3 C3 C2 3 4
C4 C4 C2 C3 2 3
C5 C5 C5 C5 C5 5 6
C6 C1 C2 C3 C4 C5 0 1
C7 C7 C7 C7 C7 C7 C7 6 7
C8 C8 C8 C8 C8 C8 C8 C8 7 8
importancia 7mo 4to 5to 6to 3to 8vo 2do 1er
Fuente: Gonzalez L. (2015)

90
Analizando la tabla 3, se puede observar que el criterio ocho es el de mayor
importancia, debido a que mayor número de veces aparece, siendo este, Mayores
cualidades para disminuir los riesgos disergonómicos e inseguros. Su ponderación de
criterio (Pcx), es igual a ocho ya que el criterio 6 tiene un número de veces igual a
cero y como no está permitido tener una ponderación de criterio igual a cero se le
suma 1 a cada uno de los números de veces que aparen los criterios.
Ponderación de soluciones respecto a cada criterio
Seguidamente como tercer método aplicamos una ponderación a las soluciones a
los criterios, lo que permite cuantificar la importancia de cada solución respecto a
cada criterio, como podemos ver en a continuación en la tablas 4-11:
� Ponderación de soluciones con respecto a criterio C1:
Tabla 4: Ponderación de soluciones con respecto a criterio C1
C1 S1 S2 Número de veces PX1=N
S1 1 P11=2
S2 S1 0 P21=1
Orden de aceptación 1er 2do
Fuente: Gonzalez L. (2015)
� Ponderación de soluciones con respecto a criterio C2:
Tabla 5: Ponderación de soluciones con respecto a criterio C2
C2 S1 S2 Número de veces PX1=N
S1 0 P11=1
S2 S2 1 P21=2
Orden de aceptación 2do 1er
Fuente: Gonzalez L. (2015)

91
� Ponderación de soluciones con respecto a criterio C3:
Tabla 6: Ponderación de soluciones con respecto a criterio C3
C3 S1 S2 Número de veces PX1=N
S1 1 P11=2
S2 S1 0 P21=1
Orden de aceptación 1er 2do
Fuente: Gonzalez L. (2015) � Ponderación de soluciones con respecto a criterio C4:
Tabla 7: Ponderación de soluciones con respecto a criterio C4
C4 S1 S2 Número de veces PX1=N
S1 0 P11=1
S2 S2 1 P21=2
Orden de aceptación 2do 1er
Fuente: Gonzalez L. (2015)
� Ponderación de soluciones con respecto a criterio C5:
Tabla 8: Ponderación de soluciones con respecto a criterio C5
C5 S1 S2 Número de veces PX1=N
S1 0 P11=1
S2 S2 1 P21=2
Orden de aceptación 2do 1er
Fuente: Gonzalez L. (2015)
� Ponderación de soluciones con respecto a criterio C6:
Tabla 9: Ponderación de soluciones con respecto a criterio C6
C6 S1 S2 Número de veces PX1=N
S1 1 P11=2
S2 S1 0 P21=1
Orden de aceptación 1er 2do
Fuente: Gonzalez L. (2015)

92
� Ponderación de soluciones con respecto a criterio C7:
Tabla 10: Ponderación de soluciones con respecto a criterio C7
C7 S1 S2 Número de veces PX1=N
S1 1 P11=2
S2 S1 0 P21=1
Orden de aceptación 1er 2do
Fuente: Gonzalez L. (2015)
� Ponderación de soluciones con respecto a criterio C8:
Tabla 11: Ponderación de soluciones con respecto a criterio C8
C8 S1 S2 Número de veces PX1=N
S1 1 P11=2
S2 S1 0 P21=1
Orden de aceptación 1er 2do
Fuente: Gonzalez L. (2015)
Ponderación final:
Finalmente como cuarto método tenemos la ponderación final, lo cual consiste en
una sumatoria total de los valores obtenidos en el tercer método, los cuales están
contenidos en las tablas 4-11, por lo que este método dará a conocer la mejor solución
que se aplica para estos criterios y restricciones ya establecidas en el proceso de
selección sistema de transmisión de potencia, lo cual se puede observar en la tabla 12:

93
Tabla 12: Ponderación final de criterios
PCX P1X PCX.P1X P2X PCX.P2X
PC1=2 P11=2 4 P21=1 2
PC2=5 P12=1 5 P22=2 10
PC3=4 P13=2 8 P23=1 4
PC4=3 P14=1 3 P24=2 6
PC5=6 P15=1 6 P25=2 12
PC6=1 P16=2 2 P26=1 2
PC7=7 P17=2 14 P27=1 7
PC8=8 P18=2 16 P28=1 8
Σ(PCX.P1X) =58 Σ(PCX.P2X) = 51
Fuente: Gonzalez L. (2015)
La Solución S1 se convierte en este caso en la solución definitiva (Ver figura 45).
5.3 Diseño de un asistente de manipulación para el montaje de estribos en los
camiones cargos 816 que cumpla con los estándares de ergonomía y seguridad
Al tomar en consideración los requisitos y necesidades dadas por los
departamentos de mantenimiento, logística y materiales (MP&L) y Vehicule
Operation Manufacturing Engineer (VOME) se llegó a la conclusión de que el equipo
no solamente tendría que disminuir los riesgos disergonómicos e inseguros, sino que
también la mayoría de las partes que lo conforman deben encontrarse dentro de la
planta Ford Motor de Venezuela S.A debido a la gran cantidad de piezas sin utilizar
que se encuentran en el almacén de dicha planta y que sin darles uso al cabo de
cierto tiempo se marcan como scrap (chatarra) y se destruyen.
Para proceder a realizar la selección y diseño de cada uno de los elementos que
conforman al asistente de manipulación, hay que tener en cuenta las cargas y los
esfuerzos a los cuales van a estar sometidos.

94
5.3.1 Selección del actuador neumático
El actuador neumático será el dispositivo que aplique la fuerza necesaria para
tomar la base del estribo ensamblado y transportarlo desde el rack hacia la posición
de montaje en la cabina del camión cargo 816; a continuación se presentaran los
cálculos usados para la selección de dicho actuador neumático:
Se usará para la elaboración de este trabajo los actuadores fabricados por la
compañía SMC, por dos razones, la primera es que es uno de los principales
proveedores de dispositivos neumáticos a la empresa Ford Motor de Venezuela S.A.
y la segunda es que existe un gran inventario tanto de actuadores neumáticos como de
sus kit de reparación en el almacén de dicha empresa. Dentro de la amplia gama de
productos que ofrece esta compañía se le dará especial atención a la línea de
actuadores neumáticos de pinzas paralelas, debido a su fácil implementación, bajo
costo, alta velocidad de reacción, gran fuerza de apriete, además de sujetan partes de
diversas formas y tamaños con total seguridad y que se pueden utilizar en espacios
reducidos.
a) Carrera
En primer lugar se procederá a establecer la carrera del actuador, la cual será igual
al ancho de la parte baja del estribo del camión cargo 816:
b) Diámetro del émbolo
El segundo aspecto necesario para la selección del actuador es el diámetro del
émbolo, el cual es proporcional a la fuerza de empuje deseada en la activación del
actuador si la presión de trabajo es constante. Lo anteriormente descrito se evidencia
en la ecuación 38, la cual se obtiene al emplear la fórmula del área de un círculo en la
ecuación 1.

95
Ec 38
Para los cálculos realizados se utilizará una presión de aire igual a la presión
efectiva de agarre de estos equipos, es decir:
Esta fuerza, para el caso específico de los actuadores de estilo de pinzas de agarre,
es distinta en el recorrido de avance y en el recorrido de regreso, ya que en el regreso
hay un vástago que disminuye el diámetro efectivo del émbolo. Por lo tanto al
simplificar la fórmula y despejar el diámetro se obtendrá:
Para calcular dicha fuerza se realizará un estudio de las fuerzas que interactúan
mediante un diagrama de cuerpo libre a la base del estribo cuando éste se encuentra
sujeto por las pinzas del actuador, ya que en este momento la fuerza será mayor
porque soporta el peso del mismo; al contrario de cuando está en avance que no
existirá gran fuerza que se oponga al movimiento lineal del actuador.

96
Figura 49. Diagrama de cuerpo libre de las pinzas sujetando el peso Fuente: Gonzalez L. (2015)
Al realizar la sumatoria de las fuerzas que interactúan, para un cuerpo estático se
obtendrá:
Ec 39
De donde:
- Fc: Fuerza cuando las pinzas sujetan el estribo. (N)
- mestribo: masa del estribo. (kg)
- g : aceleración de gravedad (9,81m/s2)
- µ: coeficiente de fricción estático entre las pinzas y la carga.
Entonces para poder determinar la fuerza que deberá ejerces el actuador es
necesario determinar el peso a transportar y el coeficiente de fricción entre las
superficies.
En el apéndice A podemos encontrar el coeficiente de fricción estático sabiendo
que las superficies en contactos son acero y goma o plástico.
Establecido el coeficiente de fricción y la masa se substituyen los valores en la
ecuación 39 para obtener la fuerza que deberá proporcionar el actuador.
Obtenida la fuerza necesaria se procede con el cálculo del diámetro del émbolo
mediante la ecuación 38:
Aunque las condiciones difieren de acuerdo a la forma de la pieza y el coeficiente
de fricción entre las pinzas de agarre y la pieza de trabajo, SMC corporation en su
catálogo de pinzas neumática MHL2 sugiere que al diámetro del embolo calculado se

97
le aplique un factor de seguridad entre 1 a 6; esto debido a que muchas veces las
condiciones de trabajo son diferentes al estado ideal. Se tomara un factor de
seguridad de 2 ya que el manual vehicle operation structure standard (VOSS)
establece que todos los actuadores de estilo pinzas neumáticas deberán soportar como
mínimo, 2 veces el peso de la carga a la cual estará sometido.
c) Selección de posibles actuadores neumático
Como tercer paso, comparamos la longitud de carrera y el diámetro del émbolo
obtenido en pasos anteriores con la tabla del apéndice B; de tal manera que podamos
disminuir el rango de posible actuador a utilizar.
Como se puede observar las dos posibles opciones de actuadores neumáticos de
estilo pinza paralelas son las siguientes:
� MHL2-32D1
� MHL2-40D
d) Verificación de existencia en el almacén de la planta ensambladora de
vehículos Ford Motor de Venezuela S.A.
Posteriormente a la selección de los posibles actuadores neumático de estilo pinzas
paralelas verificamos en el almacén de la empresa cuál de los tres se posee en el
inventario.

98
Figura 50. Búsqueda de los posibles actuadores neumáticos en la matriz de
inventario de almacén Fuente: Ford Motor de Venezuela S.A.
Como se observa en la figura 50 el actuador MHL2-40D se encuentra en el
almacén de la empresa con inventario y que aparte de ello presenta varios de sus kit
de reparación; por esta razón seleccionamos este actuador ya que beneficiaría a la
empresa por dos razones; la primera que utilizaría material que será destruido y la
segunda que se ahorraría tiempo ya que no es necesario hacer el registro en almacén
tanto del actuador y sus kit de reparación.
Tabla 13: Información en el almacén del actuador neumático. #Parte MHL2-40D
Descripción Parallel Style Air Gripper
Proveedor SMC corporation
Equipo GAN-0066
Requisito Hernan Brusco
Cod. SFR EF0563
Inventario 3
Programa Cargo 8 ton
Fuente: Ford Motor de Venezuela S.A.

99
e) Validar
Como punto final para la selección del actuador neumático verificamos que la
fuerza que proporciona el actuador si sirve para la sujeción del estribo de camión
cargo 816. Para ello procedemos de la siguiente forma:
� Fuerza ejercida por la carga:
� Punto de agarre:
Figura 51. Punto de agarre Fuente: (SMC Corporation, 2009)
En nuestro caso:
� Verificación de la fuerza del actuador

100
Con los datos obtenidos en los dos puntos anteriores ingresamos en el gráfico 1 y
verificamos si el actuador soporta dicha carga.
Grafico 1. Efectividad de la fuerza de agarre
Fuente: (SMC Corporation, 2009)
De la gráfica anterior podemos deducir que la fuerza necesaria de agarre se alcanza
aproximadamente a los 0,1 MPa, y que a una presión efectiva de 0,5MPa (condición
del punto b) el actuador soporta la carga con un factor de seguridad de
aproximadamente de 3.
5.3.2 Selección del balancín neumático
Podemos decir que el balancín neumático será el motor del manipulador de
estribos de camiones cargo 816 debido a que este dispositivo es el que encargará
tanto de suspender la carga como de subir, bajar y trasladar, desde el rack hacia la
línea de producción, por ello existen ciertas normas, reglamentos y códigos
necesarios para cumplir con todos los requisitos tanto de la Ford Motor Company
como locales, municipales y federales. A continuación se presentara algunos criterios
para la selección del balancín neumático establecidos en el un manual vehicle
operation structure standard (VOSS) de la Ford Motor Company.

101
� El uso de componentes, equipos y fabricantes no aprobado por la Ford Motor
Company sin presentación y aprobación de un Formulario de Solicitud de
Acción solicitando una desviación antes de abastecimiento, dará lugar a la
sustitución obligatoria de los componentes y equipo por el proveedor.
� Todos los componentes de carga deberán estar diseñados para proporcionar un
mínimo de un 5 factor de seguridad de diseño.
� Todos los balanceadores, sujetadores y accesorios suministrados, incluida la
fundición, forja, estampados y piezas soldadas, se clasificarán de manera que
las tensiones aplicadas a los equilibradores, conexiones o accesorios no
superen el 12 por ciento de la mínima resistencia a la rotura del material.
� Todos los componentes, soportes de seguridad redundantes y primaria deberán
ser capaces de soportar, como mínimo, 2 veces el peso combinado del
equilibrador, carga nominal y todos los archivos adjuntos.
� El regulador en línea estará dimensionado para limitar la presión de entrada al
equilibrador a máxima 100 psi.
� El peso total del efector de extremo y la carga debe ser menor por lo menos
70% que la capacidad declarada del balancín neumático.
� El ángulo de deflexión de la parte inferior del equilibrador con la carga no
debe exceder de 10 grados en cualquier dirección. � El indicador de fin de carrera (pelota parada) no debe ser reubicado de la
ubicación configurada en la fábrica, y debe ser colocado aproximadamente 25
mm de la cadena en la posición más alta.
Se usará para la elaboración de este trabajo los balancines neumáticos fabricados
por la compañía Knight Global, Inc por dos razones, la primera es que se encuentra
registrado y aprobado por los estándares de Ford Motors Company y la segunda es
uno de los proveedores que cumple con la mayor cantidad de estándares establecidos
en el vehicle operation structure standard (VOSS).
a) Carga a soportar por el Balancín

102
Como primer paso estableceremos la carga total que soportara el balancín
neumático; este no es más que la masa total del manipulado incluyendo todos las
partes que lo conforman más la masa del estribo.
Ec 40 De donde:
- msbalancin= Masa que soportará el balancín. (kg)
- mestribo= Masa del estribo de camión cargo 816. (kg)
- mActuadorN= Masa del actuador neumático. (kg)
- mtub= Masa de los tubos del manipulador. (kg)
b) Capacidad del balancín neumático
Para el cálculo de la capacidad del balancín se considera que la carga calculada en
el paso anterior no debe sobrepasar el 70% de la capacidad del balancín.
Ec 41
De donde:
- Cbalancin= Capacidad del balancín neumático. (kg)
- msbalancin= Masa que soportara el balancín. (kg)
Con la capacidad calculada del balancín neumático, recurrimos a la tabla del
apéndice C y buscamos el balancín neumático que más se acerque a nuestros
requerimientos. El cual es:
- Modelo KBC150-070 (knight)

103
5.3.2 Red de control neumático
Una vez seleccionados los dispositivos neumáticos a ser utilizados es necesario
elaborar un diagrama de control neumático que coordine la acción combinada de
dichos dispositivos; con el objetivo de realizar el transporte del estribo de camión
cargo 816 del rack hacia la línea de producción. Para esto se elaboró el diagrama de
flujo que además de ser una herramienta para entender el proceso, nos ayuda en el
diseño de la red de control neumático que gobiernan al balancín y al actuador lineal.
Con el diagrama de flujo de la figura 52 determinamos la operación en donde
encaja cada dispositivo neumático, la duración de su intervención y su
funcionamiento para con ello diseñar la red de control neumático que gobernara el
manipulador de estribos de camiones cargo 816.

104
Figura 52. Diagrama de flujo para el montaje de estribo en los camiones cargo
816. Fuente: Gonzalez L. (2015)

105
Figura 53. Diagrama de movimiento para la pinza neumático MHL2-40D, balancín neumático KBC150-070.
Fuente: Gonzalez L. (2015)
Para el diseño de la red de control neumático tomamos como referencia los dos
diagramas mostrados en la figura 54, enfatizando la intervención de los dispositivos
neumáticos y lo que se busca controlar. De acuerdo a esto resumimos el proceso de
montaje de estribo de camiones cargo 816 en tres operaciones simples, las cuales se
indican a continuación:
1) Tomar del rack el estribo de camión cargo 816
2) Levantar y trasladar el estribo de camión cargo 816.
3) Posicionamiento, fijación y liberación del estribo de camión cargo 816

106
A continuación se muestra la red de control neumático del manipulador de estribos
de camiones cargo 816 obtenidas del software de simulación Automation Studio, en
donde se ha diseñado en base a los puntos considerados previamente, una red
neumática de control que permita gobernar las intervenciones del balancín y la pinza
neumática.
Figura 54. Control y accionamiento neumático del manipulador de estribos de camiones cargo 816
Fuente: Gonzalez L. (2015)

107
5.3.4 Análisis mecánico de los elementos estructurales del asistente de
manipulación de estribos.
En la empresa se cuenta con tubos de acero 1020 de 1 pulgada para la fabricación
de: la estructura principal y el manubrio del asistente de manipulación. Es por esto
que los cálculos se basaron en las características de este material las cuales se pueden
visualizar en el apéndice D.
Datos:
- Acero AISI-SAE 1020.
- Sy= 205 MPa
- Su= 380MPa
- ρ1020=7,87g/cm3.
- De=33,4mm.
- Di=26,6mm.
a) Estructura principal del asistente de manipulación.
El análisis mecánico de la estructura se realizó mediante la teoría de falla de Von
MISES-HENCKY y luego se comprobó en el software Autodesk Inventor 2014 si
esta soportaría las fuerzas ejercida sobre ella. Debido a que la carga es mínima a la
estructura no se le realizo estudio de fatiga debido a que los picos máximos y mínimo
a través del tiempo son despreciables.
Las ecuaciones que a continuación se presentan se obtienen de realizar una
sumatoria de fuerza en el diagrama de cuerpo libre mostrado en las figuras 55:
Ec 43
Ec 44
Donde

108
- F=Fuerza ejercida por la carga.(N)
- Pc=Peso del actuador neumático.(N)
- Pt=Peso de la tubería.(N)
- T=Tensión ejercida hacia el balancín.(N)
- Fe=Fuerza de empuje.(N)
- Fr=Fuerza de roce entre las 4 Rueda del trolley y la rieleria.(N)
- m= masa del manipulador. (Kg)
- a= aceleración del manipulador. (m/s2)
Figura 55. Diagrama de cuerpo libre de la estructura del manipulador de
estribos Fuente: Gonzalez L. (2015)
Realizando una sumatoria de fuerzas a la figura 56 obtenemos las siguientes
ecuaciones:
Ec 45

109
Ec 46
Ec 46a
Ec 46b
Donde:
- Fp=Peso de todo el asistente de manipulación.(N)
- µ=coeficiente de fricción cinético.
- N= fuerza que ejerce la superficie sobre las ruedas del trolley. (N)
- Pbalancín = Peso del balancín neumático.(N)
Figura 56. Diagrama de cuerpo libre de las ruedas del trolley
Fuente: Gonzalez L. (2015)
De las ecuaciones 43, 44, 45, 46,46a y 46b se conoce:

110
- F=98,1N
- Pc=51,69N.(Apéndice B)
- µ=0, 04 coeficiente de fricción cinético entre el teflón y el aluminio (Apéndice
A).
- Pbalancín= 226,91N (Apéndice C)
� Cálculo del peso
del tubo (Pc)
Para el cálculo del peso del tubo procederemos de la siguiente forma:
Ec 47
Ec 48
Donde:
- Vtubo= volumen de
tubo.(mm3)
- Ltubo= Longitud
total del tubo.(mm)
- re= Radio exterior
del tubo.(mm)
- ri= Radio interior
del tubo.(mm)
Utilizando el anexo B podemos determinar la longitud del tubo de la siguiente
manera:
Ltubo=640+3. (152)+190+70+240+350+450= 2396mm
Valiéndose de la ecuación 48 calculamos el volumen del tubo:
Vtubo=767,78x103mm3
Por último, calculamos el peso del tubo con la ecuación 47:
Ptubo=59,27N

111
� Cálculo de la
tensión ejercida hacia el balancín (T)
Para encontrar la tensión ejercida hacia el balancín neumático recurrimos a la
ecuación 43:
T=209,06N
� Cálculo de la
fuerza de roce entre las ruedas del trolley y la rieleria (Fr)
De la ecuación 46a sabemos que:
Utilizando la ecuación 46 obtenemos:
Sustituyendo en la ecuación 46b los valores de T y Pbalancín: obtenemos:
N= 108,99N
Sustituyendo los valores obtenemos la fuerza de roce.
� Cálculo de la
Fuerza de empuje (Fe)
Para calcular la fuerza de empuje sustituimos los valores obtenidos en los pasos
anteriores, en la ecuación 44 o en la ecuación 45, teniendo en cuenta que la velocidad
a la cual se moverá el manipulador es constante lo que hace que la aceleración sea
cero.
Fe=17,4N
En la siguiente figura se muestran las fuerzas aplicadas en la estructura del
asistente de manipulación de estribos y la ubicación de su centroide el cual su
determinación se puede visualizar en el apéndice E.

112
Figura 57. Fuerzas aplicadas a la estructura del asistente de manipulación de
estribos Fuente: Gonzalez L. (2015)
Como se puede observar solo existirán fuerzas en los ejes X y Y lo que significa
que σz=0 por lo tanto solo tendremos tensiones principales ττττmax,σσσσ1 y σσσσ2, en el estado a
partir de las tensiones directas ττττx, σσσσx y σσσσy como se demuestra en la figura 30 del
capítulo III.
Ya que se evidencio la existencia de las tensiones máximas y tensiones
principales, se deben relacionar con las posibilidades de falla, para ellos primero se
analizara cada una de las fuerzas mediantes las ecuaciones 5, 12 y 12a, de manera de
poder determinar sus efectos sobre la estructura del asistente de manipulación.
� Fuerza F:
- Efecto primario;
Corte directo por F

113
- Efecto secundario
de F; corte por momento torsor respecto al centroide,
MT=0,1886m*149,7N= 28,23Nm
- Efecto terciario de
F; tensión por momento flector respecto al centroide,
Mf=0,234m*149,7N= 34,99Nm
De igual manera se calculan los efectos que producen las cargas Fe y T.
� Fuerza Fe:
- Efecto primario;
Corte directo por Fe
- Efecto secundario
de Fe; corte por momento torsor respecto al centroide,
MT=0 debido a que la fuerza no produce momento torsor
- Efecto terciario de
Fe; tensión por momento flector respecto al centroide,
Mf=0,0271m*17,4N= 0,47Nm
� Tensión T:

114
- Efecto primario;
Corte directo por T
- Efecto secundario
de T; corte por momento torsor respecto al centroide,
MT=0 debido a que la fuerza no produce momento torsor
- Efecto terciario de
T; tensión por momento flector respecto al centroide,
Mf=1,22x10-3 m*209,24N= 0,256Nm
En la figura 58 se muestra la interacción de los esfuerzos en la sección transversal
de un punto crítico de la estructura del asistente de manipulación de estribos, en ella
podemos observar que el esfuerzo resultante en X es mayor que el resultante en –X,
pero en –X es más crítico que en X.
Debido a que Syc<Syt para los aceros, es necesario estudiar en –Y donde los
esfuerzos son de compresión

115
Figura 58. Interacción de los esfuerzo en la sección transversal de la estructura
Fuente: Gonzalez L. (2015)
Para aplicar la teoría de falla de VON MISES-HENCKY es necesario sumar
ortogonalmente los esfuerzos primarios, de tal manera, que nos permita calcular un
esfuerzo de corte resultante.
- Como los
esfuerzos por efecto primario de F y T están paralelos, la resultante será la
suma algebraica de su magnitud y su dirección será igual a la de T debido a
que esta es mayor.
- Puesto que el
esfuerzo primario de Fe y la resultante τtf se encuentran perpendiculares entre

116
sí, la suma ortogonal de ellas se la raíz cuadradas de sus magnitudes al
cuadrado.
- De manera similar
a los pasos anteriores se obtiene σMf Resultante.
- Para calcular el
τres crearemos unos ejes X´, Y´, Z` para así evitarnos estar proyectando los
esfuerzos en los ejes X, Y.
Figura 59. Calculo del esfuerzo de corte resultante
Fuente: Gonzalez L. (2015)

117
Empleando la ecuación 22 de teoría de falla de VON MISES-HENCKY se tiene:
� Análisis de
fuerzas aplicadas a la estructura del asistente de manipulación de estribo
utilizando el software Autodesk Inventor 2014
Figura 60. Simulación de fuerzas aplicada a la estructura principal del
manipulador. Fuente: Gonzalez L. (2015)
En la figura 61 se puede ver el comportamiento que tiene la estructura del asistente
de manipulación del estribo con las cargas aplicadas. Utilizando Von Misses se

118
observa que el punto más crítico del soporte está en .4, 504 MPa y el limite elástico
de la estructura es de 205 MPa, siendo mucho mayor que el esfuerzo que esta debe
soportar.
Por otro lado, la figura 62 muestra, como era de esperarse, que el factor de
seguridad de la estructura del asistente de manipulación es igual a 7,5.
Figura 61. Análisis de fuerzas y obtención de factor de seguridad, realizado
mediante el software Autodesk Inventor 2014 Fuente: Gonzalez L. (2015)
b) Manubrio del asistente de manipulación.
Para el diseño del manubrio se cuenta con el mismo tubo de la estructura del
asistente de manipulación y primero determinaremos si la barra 1; mostrada en la
figura 63, falla por inestabilidad elástica o geométrica, luego a estudiaremos la barra
2 de la misma figura mediante la teoría de falla de Von Mises y por ultimo
verificaremos que la soldadura que une estas dos barras no fallara.

119
Figura 62. Manubrio del asistente de manipulación de estribo
Fuente: Gonzalez L. (2015)
� Barra 1
Para el diseño de esta barra del manubrio se verificará que esta no falla por
inestabilidad elástica o geométrica ya que no es un elemento de maquina corto y
puede suceder que el momento elástico interno no sea capaz de contrarrestar el efecto
de la carga Fe y que se produzca el fallo de la pieza.
Figura 63. Barra 1 del Manubrio Fuente: Gonzalez L. (2015)
Primero que nada, se calculara mediante la ecuación 27 el coeficiente de esbeltez
en el cual la teoría de Euler y Johnson son válidos.

120
Como es una barra que estará empotrada en ambos extremos n=4
Ec 41
Donde:
I: Inercia de la sección trasversal de la pieza. (m4)
R: radio de giro de la superficie. (m)
A: Área de la sección transversal de la pieza. (m2)
Sustituyendo los valores de la inercia y el área en la ecuación 41 nos queda:
Entonces:
Como la barra es de 350mm; se calculara el hmin de Johnson por medio del
coeficiente de esbeltez mínimo y se verificara que esta no sea un elemento corto
Como la longitud de la barra esta entre el rango de Johnson no fallara por
inestabilidad elástica.
Ahora para saber a qué carga crítica fallara la pieza calculamos el coeficiente de
esbeltez real y sustituyendo en la ecuación 28.

121
Como Fe < Pcr la pieza no fallara.
� Barra 2
Mediante la teoría de falla de Von Mises descrita en el capítulo III se comprobara
que esta barra no fallaría al aplicarle la fuerza Fe.
Figura 64. Barra 2 del manubrio
Fuente: Gonzalez L. (2015)
Como se observa el punto crítico de la pieza está en el medio de la misma por ello
aplicaremos la teoría de falla en este punto.
- Corte directo por Fe:

122
- Corte por torsión Mt=0
- Tensión por Mf=1522,5Nmm
Von Mises:
N=294,37
Con el factor de seguridad calculado comprobamos que esta barra tampoco fallará.
� Soldadura
En general los procedimientos de soldadura para perfiles rectangulares se pueden
utilizar de la misma forma que para los perfiles tubulares. Los perfiles tubulares se
pueden unir a soldadura en ángulo si la relación entre los diámetros de los tubos es
menor o mayor que 1 y si la separación a soldar no es mayor de 3mm, por otro lado si
la relación entre los diámetros es igual a 1 se puede utilizar soldadura a tope en todo
el perímetro.

123
Figura 65. Soldadura en tubos circulares. Fuente: (Instituto tecnico de la estructura en acero)
Como la fuerza es Fe podemos obtener σ mediante la ecuación 31, conociendo que
esp es el espesor del tubo y L es el perímetro de la circunferencia exterior.
Ahora se calcula el σadm, con el limite elástico del acero 1020 y un factor de
seguridad N = 3
Comparando σ con σadm, se puede observar que σadm> σ, comprobando así que
la soldadura resistirá.
5.4 Factibilidad técnica y económica del Proyecto Propuesto
5.4.1 Factibilidad técnica
El diseño de la propuesta es técnicamente factible, ya que la empresa cuenta con
todos los equipos, software, máquinas y herramientas necesarias para el
levantamiento en tres dimensiones, elaboración de planos y construcción del
dispositivo, es decir que la empresa no requiere realizar inversión en adquisición de
nuevos equipos, ni tampoco repotenciar o actualizar los equipos ya existente, ya que

124
los mismos satisfacen los requerimientos establecidos para el desarrollo de este
proyecto.
5.4.2 Factibilidad económica
A continuación se presenta un estudio que dío como resultado la factibilidad
económica de este presente informe de pasantía. Se determinaron los recursos para
desarrollar e implementar el asistente de manipulación de estribos de camiones cargo
816, haciendo una evaluación de la rentabilidad del proyecto y los beneficios que se
derivan de éste, lo cual permitió observar de una manera más precisa las bondades del
diseño propuesto.
� Análisis de Beneficios económicos
a) Mejora en el tiempo:
Este análisis permitió determinar el aumento de la producción de la empresa Ford
Motor de Venezuela S.A, y por ende de los ingresos de la empresa mediante la
disminución del tiempo gracias a la implementación del asistente de manipulación de
estribos de camiones cargo 816.
Los siguientes cálculos son basados en datos de producción de camión cargo 815
en la empresa Ford Motos de Venezuela S.A. debido a que el Cargo 816 aún no se
estaba ensamblando en Venezuela.
Datos:
- Producción de camiones cargo 815 en el año 2014: 700 unidades
- Días Laborables al año: 247 días.
- Horas laborables por día: 8 Horas.
- Estaciones en línea final de camiones =15
Con estos datos podemos calcular cuántos camiones cargo 815 se produjeron a
diario:

125
Debido a que un día laboral tiene 480 min podemos decir que el tiempo que cada
unidad estará en la línea final de camiones de la empresa Ford Motor de Venezuela
S.A. será igual a 160min/Unidad, esto quiere decir que en promedio la unidad estará
11min por estación.
En la estación que nos interesa se tomó el tiempo que los operarios duran
instalando el estribo en el camión cargo 816 y es de aproximadamente unos 15 min,
en lo cual 9 de los minutos eran de agarrar, trasladar, cuadrar e introducir el estribo en
el camión cargo 816.
Al implementar el asistente de manipulación de estribos de camiones cargo 816 el
tiempo que la unidad estaría en la línea será de 151min debido a que se eliminarían
los tiempos desperdiciados ya mencionados.
Entonces podemos decir que ahora las 3 unidades que se fabrican diariamente
estarían en la línea el tiempo de 453min o lo que es igual a 7 horas.
Si ahora las 3 unidades se producen en 7 horas, las 700 unidades que se
produjeron en el año se produciría en 1633 horas o lo que es igual a 204 días, es decir
que implementando el asistente de manipulación de estribos de camiones cargo 816
se pueden producir aproximadamente 72 unidades más en el mismo año de labor,
entonces podemos decir que se aumentaría la producción de camiones cargo 816 en
un 10%.
b) Disminución de lesionados:
En el año 2014 existieron 10 lesionados por la operación de montaje de estribos en
el camión cargo 815, es decir, que en promedio hubo 1 lesionado por cada 70
camiones que se ensamblo, esto trajo como consecuencia gastos por parte de la
empresa en indemnizaciones de los operarios lesionados y por ende la disminución de
las ganacias en la empresa, al implementar el asistente de manipulación de estribos de
camiones cargo 816 se disminuirá en un 100% los lesionados debido a que no
existirán condiciones disergonómicas e inseguras.
c) Disminución del personal en las estaciones

126
Al implementar el asistente de manipulación de estribos de camiones cargo 816,
no será necesario que en esta estación estén 2 personas, ya que no habrá la necesidad
de que una ayude a trasladar y sujetar el estribo mientras la otra lo instala. Estas dos
personas podrán ser reubicas en otras estaciones en donde si falte personal o
prescindir de su trabajo y dejar de pagar dos sueldos innecesarios.
� Análisis de costo
Este proyecto es económicamente factible por varias razones:
- Los costos de fabricación son relativamente bajos debido a que la mayoría de
sus partes se encuentran en el almacén de la empresa.
- La empresa obtiene benefician tales como el aumento de la producción debido
a la disminución de tiempo, disminución de las lesiones en los operadores ya
que no existirán riesgos disergonómicos e inseguros.
- Aumento de las ganancias debido al aumento de la producción disminución de
lesionado.
El apéndice F muestra una tabla de los elementos necesarios para construir el
asistente de manipulación, en ella podemos observar los componentes existentes en el
almacén de la empresa en verde y los que no se encuentran en rojo, es decir que la
inversión total para la construcción del asistente de manipulación será:
+
Se puede decir que la inversión sería mínima con respecto a las ganancias de la
empresa al vender los camiones cargo 816, lo que significa que es económicamente
factible el proyecto

127
CONCLUSIONES
Para el diagnóstico de los problemas disergonómicos e inseguros en el proceso de
montaje de estribo en los camiones cargo 816, fue necesaria la ayuda de los
departamentos de mantenimiento, departamento de logística y materiales (MP&L), el
departamento de Vehicule Operation Manufacturing Engineer (VOME) y los
operadores de la empresa Ford Motor de Venezuela; aunado al funcionamiento del
mismo para saber los objetivos que este debe cumplir. Con esto se hizo un análisis de
las fallas que estaba presentando y como podían ser corregidas.
Con un primer diagnóstico se pudo ver las fallas que se estaban presentando en el
proceso, la cual era: la alta rotación del personal en la estación de montaje de estribo
debido a los factores disergonómicos e inseguros que se presentan al momento de
colocar el estribo al camión cargo 816.
Utilizando como herramienta las ecuaciones presentadas en el capítulo III y el
programa de CAD/CAN/CAE Autodesk Inventor se facilitó hacer el diseño del
asistente de manipulación de estribos de camiones cargo 816 d, ya que con estas
fórmulas y ecuaciones se pudo comprobar si el material y las dimensiones eran las
correctas y recrearlas en el programa para tener una visión en tres dimensiones del
nuevo diseño.
Con la utilización de materiales que se encuentran en las instalaciones de la
empresa Ford Motor de Venezuela se logra evitar que muchos de dichos materiales
sean marcados como scrap (chatarra) y sean destruidos lo que beneficia a la empresa
reduciendo las pérdidas anuales.
Con la implementación del nuevo asistente de manipulación los operarios no
deben realizar mucho esfuerzo físico en su desempeño, ya que no tienen que ejercer
mucha fuerza para trasladar el estribo desde la carreta hacia la línea de producción, lo
cual se transforman en reducción de riesgos disergonómicos e inseguros.

128
Con la implementación del asistente de manipulación se aumenta la producción y
se disminuyen a un máximo la cantidad de lesionados, trayendo consigo más
ganancias a la empresa y menos problemas de índole sindical.

129
RECOMENDACIONES
En busca de dar un buen uso al dispositivo diseñado y alargar su periodo de vida, a
continuación se muestran una serie de recomendaciones.
Una vez ejecutado el proyecto se debe crear un plan de mantenimiento preventivo,
que siga las recomendaciones de los fabricantes de los equipos seleccionados, para
mantener las condiciones de operación del sistema.
Si se realiza un cambio en el proceso que implique un aumento mayor al 20% de
la carrera del actuador neumático es necesario reconsiderar la utilización del actuador
seleccionado en este trabajo.
Si se opera con el punto de agarre de trabajo más allá de los rangos indicados, la
carga que se aplicará a las pinzas se convertirá excesivamente desequilibrada. Como
resultado, las pinzas podrían llegar a aflojarse y afectar negativamente a la vida útil
del actuador.

130
BIBLIOGRAFÍA
Antonio, C. (2010). Instrumentacion Industrial (8va ed.). Mexico D.F: Alfaomega.
Arias, F. G. (1999). El Proyecto de Investigacion. Caracas: ORIAL EDICIONES.
Atlas Copco . (15 de marzo de 2010). Atlas Copco. Obtenido de Atlas Copco:
http://www.atlascopco.cl/Images/Compressed_Air_Manual_tcm46-
1249312.pdf
Baturone, A. O. (2001). Robotica manipuladores y robots moviles. Barcelona:
Alfaomega.
DAF. (5 de enero de 2015). DAF a paccar company. Obtenido de DAF a paccar
company: http://www.daf.com/en/sites-landing
Festo Automation S.A.U. (3 de Enero de 2015). Festo. Recuperado el 14 de enero de
2015, de festo.com: http://www.festo.com/cms/es_es/index.htm
Ford Motor de Venezuela S.A. (9 de Enero de 2015). Ford Motor Venezuela.
Obtenido de Ford Motor Venezuela: http://www.ford.com.ve/
Groupe Renault. (20 de Febrero de 2014). Renault. Obtenido de Renault:
http://group.renault.com/
Instituto tecnico de la estructura en acero. (s.f.). webaero. Obtenido de webaero:
http://www.webaero.net/ingenieria/estructuras/metalica/bibliografia_documen
tacion/itea/TOMO15.pdf
J. Garrigos. (Junio de 2008). platea.pntic.mec.es. Obtenido de platea.pntic.mec.es:
http://platea.pntic.mec.es/~jgarrigo/1bch/archivos/3eva/8_valvulas_distribuid
oras.pdf

131
J., B. R. (2008). Diseño en Ingeniería Mecánica de Shigley (8ava ed.). Mexico:
McGraw-Hill.
Knight Global, Inc. (13 de Marzo de 2012). knight-ind. Obtenido de knight-ind:
http://knight-
ind.com/brochures/knight_balancer_operation_manual_spn_euro_20130717.p
df
Lopez, R. (29 de Abril de 2009). phpwebquest. Recuperado el 15 de Enero de 2015,
de phpwebquest.org:
http://www.phpwebquest.org/newphp/webquest/soporte_tabbed_w.php?id_act
ividad=88429&id_pagina=1
Molina, M. (1970). Elementos de Máquinas I. Valencia: Facultad de Ingeniería.
Universidad de Carabobo.
Montero Jiménez S.A.S. (14 de Marzo de 2014). montero jimenez. Recuperado el 12
de Enero de 2015, de monterojimenez.com:
http://www.monterojimenez.com/manipuladores.html
quimitube. (20 de Julio de 2014). quimitube. Recuperado el 15 de Enero de 2015, de
quimitube.com: http://www.quimitube.com/videos/termodinamica-teoria-3-
transferencia-de-energia-como-trabajo-trabajo-de-expansion-y-compresion-
de-un-gas
Rocatek S.A.S. (20 de Noviembre de 2014). Rocatek. Obtenido de Rocatek:
http://www.rocatek.com/automatizacion_industrial.php
Salazar, J. L. (Marzo de 2012). monografias. Obtenido de monografias:
http://www.monografias.com/trabajos-pdf4/centro-gravedad-centroide/centro-
gravedad-centroide.pdf

132
SMC Corporation. (marzo de 2009). SMC Corporation. Obtenido de SMC
Corporation:
http://www.smc.com.cn/PDF/docs/rotarychuck/airchuck/MHL2.pdf
Tassoni M. Danilo y Pizzella P. Giovvanni (2007). Elementos de Maquina. Valencia:
Facultad de Ingeniería. Universidad de Carabobo.

133
Apéndice

134
APÉNDICE A
Tabla de coeficiente de fricción estático Fuente: (SMC Corporation, 2009)
Tabla de coeficiente de fricción Cinetico Fuente: (Serway, 1997)

135
APÉNDICE B
Tabla de Modelo / Carrera Fuente: (SMC Corporation, 2009)

136
APÉNDICE C
Parámetros para la selección de un balancín neumático Fuente: (Knight Global, Inc., 2012)

137
APÉNDICE D
Características del material
Fuente: (Sumitec S.A)

138
APÉNDICE E
Centroide de la estructura Fuente: Gonzalez L. (2015)

139
APÉNDICE F
Presupuesto para la construcción del equipo Fuente: Gonzalez L. (2015)
Empresa Direccion
Departamento
Requisitor Telef.:
Descripcion Costo Cantidad Total Existencia en Almacen
Tubo de acero 1020 1"
Presupuesto Ford Motor Venezuela S.A.
VOMEJose Manuel Leon Hosto
Urb. Industrial el Bosque, Valencia
0424-4433058/0414-4336608
manguera en espiral
Bs.F 5.000
Bs.F 5.927
Bs.F 98.780
Bs.F 3.920
Bs.F 39.200
Bs.F 2.548
Bs.F 1.960
Bs.F 980
Bs.F 1.176
cable de seguridad
collares de ejes
unidad de mantenimiento
valvula de alivio
Balancin neumatico
pinzas neumaticas MHL2
Suspensor ajustable
riel
carretilla
carrilera
trolley
caja de control
Bs.F 7.840
Bs.F 7.840
Bs.F 156.800
Bs.F 117.600
Bs.F 5.880
1
4
2
2
1 Bs.F 39.200
Bs.F 2.548
Bs.F 1.960
1
1
4
5
1
1
conectores con salida 180°
conectores rosca hembra
Horas Hombre
2
5
5
10
10
10
10
valvula 5/3 centro cerrado
valcula 3/2
pulsadores
conectores con salida 90°
conectores en T
Bs.F 12.152
Bs.F 7.448
Bs.F 980
Bs.F 350
Bs.F 350
Bs.F 350
Bs.F 350
si
si
si
si
si
Bs.F 5.880
Bs.F 3.920
Bs.F 5.880
Bs.F 7.840
Bs.F 7.840
Bs.F 156.800
Bs.F 117.600
1
1
1
Bs.F 5.000
Bs.F 23.707
Bs.F 197.560
Bs.F 7.840
si
si
si
si
si
si
si
si
si
si
si
si
si
Bs.F 24.304
Bs.F 37.240
Bs.F 4.900
Bs.F 3.500
Bs.F 3.500
Bs.F 3.500
Bs.F 3.500
Horas Maquinas
100
250
120 horas
120 horas
Bs.F 12.000
Bs.F 30.000
By: Leonardo GonzalezDate: 9/06/2015

140
APÉNDICE G
Lesiones y enfermedades habituales en el lugar de trabajo Fuente: Gonzalez L. (2015)

141

142
Anexos

143
ANEXO A
Componentes de un estribo de camión cargo 816
Anexo A1. Cubierta lateral del estribo para camión cargo 816 (medidas en mm). Fuente: Ford Motor de Venezuela S.A

144
Anexo A2. Guardafango del estribo para camión cargo 816 (medidas en mm).
Fuente: Ford Motor de Venezuela S.A

130
Anexo A3. Posapie del estribo para el camión cargo 816 (medidas en mm).
Fuente: Ford Motors de Venezuela S.A.

131
Anexo A4. Cubierta delantera del estribo para camión cargo 816
(Medidas en mm). Fuente: Ford Motor de Venezuela S.A

132
ANEXO B
Asistente de manipulación de estribos de camión cargo 816.

133

134