William Fernando Sánchez Corredor - TEINCO
52
Transcript of William Fernando Sánchez Corredor - TEINCO


William Fernando Sánchez Corredor
Ernesto Parra Herrera
Ferney Rodrigo Ortiz Jiménez
Wilson Ferney Molano García
Yaneth Lucía Hernández Castellanos
Manuel Fernando García García
Ferney Rodrigo Ortiz Jiménez
Wilson Ferney Molano García
Manuel Fernando García García
Luis Alejandro Parra Mora
Johanna Herrera Vargas
Nelson González Castro
Annie Rodriguez Collazos
Jhon Espinosa Velásquez
CORPORACIÓN TECNOLÓGICA INDUSTRIAL COLOMBIANA TEINCO
Rector
Secretario General
Representante del Consejo Directivo
Vicerrectoría Académica
Vicerrectoría de Gestión
Dirección de la División de Investigación Tecnológica Aplicada DITA
Comité Editorial
Grupo editorial, diagramación y estilo:
2019
Jhonatan Fernando Castro Garcia
Dayiry Tatiana Bedoya

Diseño y Construcción de un Sumobot de Competición Para la Población Estudiantil de TEINCO Aplicando Ingeniería Inversa ...........................................................................................
1.
CONTENIDO
Diseño y Modelamiento de un Proceso Automático Para la Selección de Botellas PET .................................................................................................................................................................
Explicación de un Algoritmo Para Robots Sumos y Minisumos, Aplicado Para la Enseñanza de la Mecatrónica en la Educación Superior ........................................................................
Minisumo/ el Diseño Mecatrónico Como Didáctica de Enseñanza Aplicado a la Elaboración de Robots ..........................................................................................................................................
Propuesta de Reincorporación Brazo Robótico Mitsubishi modelo RV-M1 Para Ambiente Educativo .........................................................................................................................................
2.
3.
4.
5.
5
13
23
33
45
Fuente de la fotografía: Mario Ramón Duarte https: //www.alainet.org/es/articulo/204354Dr. Mario Ramón Duarte Abogado (UCASAL) Juez Administrativo de Faltas Sauce (Ctes.)Especialista Derecho Faltas y Contravencional (UCSF) Investigador y consultor seguridad Miembro Dossier Geopolítico (CBA. ARG) Colaborador CENEGRI (RJ. BRA.)ESP. Ciberseguridad y ciberdefensa


Diseño y Construcción de un Sumobot
El objetivo principal de esta investigación es instaurar la competencia de robots sumo dentro de la institución Corporación Tecnológica Industrial Colombiana TEINCO, además de aplicar un modelo de ingeniería inversa a un robot sumo, para posteriormente generar, por parte del estudiante, una serie de hipótesis donde comprenda el funcionamiento y arquitectura del producto. La metodología incluye revisión documental y un método existente de ingeniería inversa, cuya propuesta o arquitectura es elaborada partiendo del producto, robot sumo. Como resultado, se evidencia mayor interés por temas de robótica, mecánica, electrónica, programación, así como aprovechamiento del tiempo, por parte del estudiante, para asistir a eventos relacionados con robots, destacando la buena participación de diferentes grupos. Por lo que concluye, con una mejor conducta regular de un estudiante promedio además de rescatar valores culturales y trabajo en equipo.
Palabras clave: Diseño, ingeniería inversa, metodología, dispositivo, mecánica, electrónica, IEEE, rama de robótica.
The main objective of this research is to establish the competition of sumo robots within the institution Corporación Tecnológica Industrial Colombiana TEINCO, In addition, to applying a model of reverse engineering to a sumo robot, to subsequently generate, by a series of hypotheses where they understand the performance and architecture of the product. The methodology includes documentary review and an existing method of reverse engineering, the proposal or architecture of which is elaborated on the basis of the product -sumo robot-. As a result, there is greater interest in topics of robotics, mechanics, electronics, programming, as well as the use of time, by the student, to attend events related to robots, highlighting the good participation of different Groups. Concluding, with better regular behavior of an average student as well as rescuing cultural values and teamwork.
Keywords: Design, reverse engineering, methodology, device, mechanical, electronics, IEEE, robotics branch.
Rodríguez Díaz EduarTécnico en mantenimiento de sistemas mecatrónicos, Estudiante, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Torres Torrecilla KevinTécnico en mantenimiento de sistemas mecatrónicos, Estudiante, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Resumen
Abstract
Diseño y Construcción de un Sumobot de Competición Para la Población Estudiantil de TEINCO Aplicando Ingeniería Inversa
Design and Construction of a Competition Sumobot for the Student Population of TEINCO Applying Reverse Engineering
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
5
Diseño y Construcción de un Sumobot
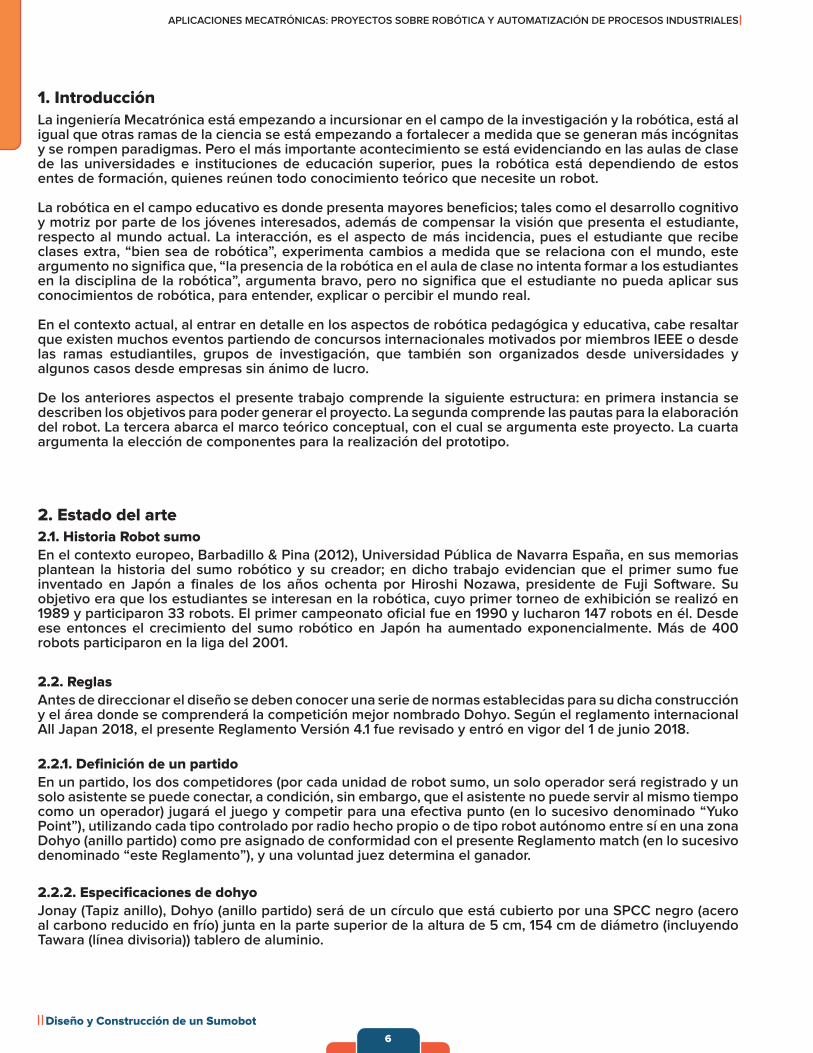
La ingeniería Mecatrónica está empezando a incursionar en el campo de la investigación y la robótica, está al igual que otras ramas de la ciencia se está empezando a fortalecer a medida que se generan más incógnitas y se rompen paradigmas. Pero el más importante acontecimiento se está evidenciando en las aulas de clase de las universidades e instituciones de educación superior, pues la robótica está dependiendo de estos entes de formación, quienes reúnen todo conocimiento teórico que necesite un robot.
La robótica en el campo educativo es donde presenta mayores beneficios; tales como el desarrollo cognitivo y motriz por parte de los jóvenes interesados, además de compensar la visión que presenta el estudiante, respecto al mundo actual. La interacción, es el aspecto de más incidencia, pues el estudiante que recibe clases extra, “bien sea de robótica”, experimenta cambios a medida que se relaciona con el mundo, este argumento no significa que, “la presencia de la robótica en el aula de clase no intenta formar a los estudiantes en la disciplina de la robótica”, argumenta bravo, pero no significa que el estudiante no pueda aplicar sus conocimientos de robótica, para entender, explicar o percibir el mundo real.
En el contexto actual, al entrar en detalle en los aspectos de robótica pedagógica y educativa, cabe resaltar que existen muchos eventos partiendo de concursos internacionales motivados por miembros IEEE o desde las ramas estudiantiles, grupos de investigación, que también son organizados desde universidades y algunos casos desde empresas sin ánimo de lucro.
De los anteriores aspectos el presente trabajo comprende la siguiente estructura: en primera instancia se describen los objetivos para poder generar el proyecto. La segunda comprende las pautas para la elaboración del robot. La tercera abarca el marco teórico conceptual, con el cual se argumenta este proyecto. La cuarta argumenta la elección de componentes para la realización del prototipo.
En el contexto europeo, Barbadillo & Pina (2012), Universidad Pública de Navarra España, en sus memorias plantean la historia del sumo robótico y su creador; en dicho trabajo evidencian que el primer sumo fue inventado en Japón a finales de los años ochenta por Hiroshi Nozawa, presidente de Fuji Software. Su objetivo era que los estudiantes se interesan en la robótica, cuyo primer torneo de exhibición se realizó en 1989 y participaron 33 robots. El primer campeonato oficial fue en 1990 y lucharon 147 robots en él. Desde ese entonces el crecimiento del sumo robótico en Japón ha aumentado exponencialmente. Más de 400 robots participaron en la liga del 2001.
Antes de direccionar el diseño se deben conocer una serie de normas establecidas para su dicha construcción y el área donde se comprenderá la competición mejor nombrado Dohyo. Según el reglamento internacional All Japan 2018, el presente Reglamento Versión 4.1 fue revisado y entró en vigor del 1 de junio 2018.
En un partido, los dos competidores (por cada unidad de robot sumo, un solo operador será registrado y un solo asistente se puede conectar, a condición, sin embargo, que el asistente no puede servir al mismo tiempo como un operador) jugará el juego y competir para una efectiva punto (en lo sucesivo denominado “Yuko Point”), utilizando cada tipo controlado por radio hecho propio o de tipo robot autónomo entre sí en una zona Dohyo (anillo partido) como pre asignado de conformidad con el presente Reglamento match (en lo sucesivo denominado “este Reglamento”), y una voluntad juez determina el ganador.
Jonay (Tapiz anillo), Dohyo (anillo partido) será de un círculo que está cubierto por una SPCC negro (acero al carbono reducido en frío) junta en la parte superior de la altura de 5 cm, 154 cm de diámetro (incluyendo Tawara (línea divisoria)) tablero de aluminio.
1. Introducción
2.1. Historia Robot sumo
2.2. Reglas
2.2.1. Definición de un partido
2.2.2. Especificaciones de dohyo
2. Estado del arte
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
6
Diseño y Construcción de un Sumobot
García (2010), en su tesis doctoral, titulada: “Control visual – fuerza auto-calibrado para seguimiento de trayectorias en tareas robóticas” presenta en sus resultados nuevas técnicas de control de robot manipuladores, a la vez planteando nuevos esquemas de seguimiento de trayectorias empleando información visual y de fuerza, que permita al robot repetir trayectorias seguras, en entornos muy complejos para tareas de ensamblados.
En el continente de América, en la Universidad Nacional Autónoma de México (2010), se desarrolló la implementación de un sumobot de uso didáctico y educativo, capaz de fomentar las capacidades en diferentes áreas de la ciencia a los estudiantes del Centro Educativo Cruz Azul, Bachillerato Cruz Azul. Manteniendo de cierta forma la orientación y finalidad de los torneos de sumobot, pero conservando una posición de respeto, tolerancia y compromiso, en cuanto al uso de este dispositivo, cabe resaltar que en este proyecto se enfocaron en la creación de un dispositivo de entretenimiento con un diseño propio, que, no solo fuera amigable a la vista de los estudiantes sino también a la de los adultos, de esta forma se encargaron no solo de mantener un estético agradable, sino que también se preocupan por competir en las actividades recreativas que se fueran organizando.
En el mismo estudio nombrado “sumobot de uso didáctico y educativo”, el proyecto logra cumplir con lo requerido desde un principio; este llega a fortalecer los vínculos entre los estudiantes y las deficiencias con respecto a las asignaturas, de tal manera que llega a ser fuente de inspiración para nuevos proyectos, ya sea que tenga relación con respecto al tema o no. Como, por ejemplo, el nuevo estudio de un (Diseño y Programación de un Algoritmo de Control para un Robot de Combate en un PIC16F84A, 2016 p.1), manera que sea este autónomo en las decisiones durante la batalla de sumo o cualquier otra actividad.
Dimensiones longitudinales: El robot será de 20 cm de ancho y 20 cm de profundidad (sin restricción de la altura), capaz de ser almacenado en un marco de cuadro cubículo para la inspección estándar.
Peso: 3.000 g o menos (incluyendo los accesorios); proporcionado, sin embargo, que, en el caso del modelo controlado por radio, el peso del sistema de control proporcional (en lo sucesivo denominado “PCS”) será excluido del límite de 3.000 g.
Robot autónomo, condición de arranque: El robot debe comenzar la instrucción desde el controlador remoto por “comienzo / parada remota remoto control”(en lo sucesivo denominado ‘control remoto dedicado’) por el personal del evento.
Robot autónomo, condición de parada: Un robot autónomo debe ser parado por un control remoto dedicado o el control remoto de un jugador. El funcionamiento del control remoto dedicado es realizado por el juicio o el personal de la competencia desde fuera del campo de juego. (2) Si el “controlador remoto” se basa en ondas de radio, puede no usarse la gama de onda para los modelos controlados de radio utilizados en el torneo. Sin embargo, se excluye de 2,4 GHz. Además, no se debe utilizar el sistema de control proporcional que no sea nuevo sistema de control de radio en el control remoto.
Uso de cuchillas: Tales componentes como pueden dispersarse desde el cuerpo del robot cuando está en contacto con otros robots o durante el movimiento se prohibirá.
Como regla básica, el tiempo de la competencia se basa en tres partidos en tres minutos, y el equipo que obtiene dos puntos yuko (efectivos) en el tiempo de competencia será considerado el ganador.
Si sólo hay un único punto de yuko (punto efectivo) se ha llegado al final del tiempo de competición, el equipo que ha conseguido el punto yuko será considerado el ganador.
Si ninguno de los equipos gana el partido dentro del tiempo de competencia, el ganador se decidirá de acuerdo con el artículo 15 [yusei].
a)
b)
c)
d)
e)
a)
b)
c)
d)
3.1. Antecedentes Europa
3.2. América latina
2.2.3. Especificaciones de un robot sumo
2.2.4. Reglas de partida
3. Marco de referencia
a. El tiempo de competencia se extenderá por tres minutos. en el tiempo de extensión, el equipo el cual recibe un punto yuko (punto efectivo) será considerado el ganador de la competición.
No se permite el mantenimiento hasta que acabe la competición; condición, sin embargo, que esto se no aplicar a cualquier tipo de mantenimiento llevadas a cabo durante el tiempo de espera para el próximo partido o cualquier cambio de programa para robot autónomo tipo llevado a cabo durante el partido.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
7

Diseño y Construcción de un Sumobot
En el contexto colombiano, Germán, D (2012) en su proyecto de grado: titulado: “Goliat - Robot del Instituto Tecnológico Metropolitano para la categoría de sumo en Medellín” evidencia en su proyecto que está dirigido a las competencias de sumobot, además define que es un dispositivo automatizado y de la rama de la robótica. Resalta, que el proyecto es un total éxito, que cumple con los objetivos que desde un principio se había establecido, añadiendo a este la condecoración (por parte del campeonato), que recibe este proyecto por ser el ganador.
La adaptabilidad, fue el criterio por el cual se seleccionaron los componentes, debido a las condiciones en la cual se expone el robot sumo: ambientes agresivos, de luz variable, superficies opacas o rayadas, oponentes con apariencia opaca. Son criterios que permiten visualizar el ambiente además del contrincante.
Al implementar el filtro, se seleccionaron diferentes componentes que cumplen con especificación de adaptabilidad suficientes para la construcción del robot, a continuación, se citan:
En el proceso de selección de componentes se escoge el motor de DC Banebots RS-550 con una armadura equilibrada de 3 polos. Este motor es compatible con cajas de piñones planetarios que reducen la velocidad y aumentan el par.
Caja reductora p60, es utilizada en el robot para aumentar el par y bajar su velocidad en relación 64:1, se debe tener en cuenta que la caja p60, no es compatibles con cualquier motor.
SPEED(R.P.M)
CURRENT(A)
CURRENT(A)
TORQUE(g.cm)
OUTPUT(W)
CURRENT(A)
TORQUE(g.cm)
19300
12V,58 RPM 60:1 GEAR MOTOR 254,8 mNm 58 22,58 US
12V,17 RPM 200:1 GEAR MOTOR 784 mNm
12V,185 RPM 20:1 GEAR MOTOR 78 mNm 185 22,58 US
22,58 US
BANEBOTS 64:1 P60 GEARBOX AND RS 555 BRUSHED MOTOR
13 Nm 121 70 US
REMARKS
NO LOAD
MODELO VOLTAGE: 12VDC
1,5 10,75
AT MAX. EFFICIENCY
AT MAX. EFFICIENCY TORQUE RPM PRICE
551 95,74 77
STALL
4500
3.3. Colombia
4.1. Motor DC
4.2. Gear Banebots P60}w 3
4.3. Módulo IBT2
Tabla I
Tabla II
Fuente: Elaboración propia.
Fuente: Elaboración propia.
4. Elección de componentes
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
8

Diseño y Construcción de un Sumobot
Debido a la alta corriente con la cual se debe manejar los motores, se decide manejar los ibt2 de 43A cuenta con; protector ante sobrecalentamiento y sobre corriente, aislador que permite separa el circuito de control de la parte de potencia para mantener la integridad del dispositivo, puesto que este driver puede llegar a generar una corriente de hasta 43a. este módulo es posible utilizarlo con señales PWM.
Se escoge una placa basada en el Arduino MEGA 2560 pero modificada para permitir su uso con la Android Open Accessory Development Kit (ADK), Dispone de un puerto USB host interface para conectarlo con dispositivos basados en Android basados en el chip MAX3421e. Dispone de 54 pines I/O (14 de los cuales con PWM), 16 entradas analógicas, 4 puertos UARTs (por hardware), un cristal de 16 MHz, un conector USB, un conector de alimentación Jack, pines para ICSP y un botón de RESET.
4.4. Arduino ADK
4.5. Batería
4.6. Sensores
Sensores TCRT 5000
Figura 2. Arduino ADK, pág., productos Arduino. Fuente: elaboración propia 2019
Figura 3. Batería lipo 3500mAh, pág. vistronica virtual. Fuente: elaboración propia 2019
Figura 4. Sensor TCRT 5000.pag.vistronica tienda virtual. Fuente: elaboración propia 2019
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
9

Diseño y Construcción de un Sumobot
4.6.1. Sensores E18-D80
4.6.2. Sensores Sharp
5. Diseño del dispositivo
5.1. Diseño asistido por PC Hardware
Figura 5. Sensor e18, pág. vistronica tienda. Fuente: elaboración propia 2019
Figura 6. Sharp 20-150 cm. pág. sharp. Fuente: elaboración propia 2019
Figura 7. Diseño sumobot Némesis 4.0. Fuente: elaboración propia 2019
En el proceso de caracterización se selecciona un sensor de distancia Sharp GP2Y0A21 permite obtener la distancia entre el sensor y algún objeto dentro del rango de 20 a 150cm. Integra tres dispositivos: Un detector sensitivo de posición (PSD), un diodo emisor de infrarrojos (IRED) y un circuito procesador de señales
Siguiendo las especificaciones del reglamento y tomando como principal enfoque el desarrollo tecnológico y mecánico del sumobot se plantea las siguientes etapas de diseño:
En el entorno SOLIDWORKS, se realiza un bosquejo esquemático de la base una estructura sólida, que será fundamental pues soportará grandes impactos, además de soportar el peso de los motores. Seguido del diseño de los laterales que soportan los ejes de las ruedas y brindaran rigidez. por último, el diseño de la cubierta superior del robot que soporta la electrónica.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
10

Diseño y Construcción de un Sumobot
Figura 8. Estructura básica, caja negra. Rodriguez. E, Torres K. Fuente: elaboración propia 2019
Figura 9. Estructura caja negra, identificación de entradas y salidas. Fuente: elaboración propia 2019
Usando el entorno de programación de Arduino, sumado el editor Sublime Text, y una placa de control (Arduino mega ADK) FIGURA [2], se diseña un código de secuencias, que comprenda las variables generando rutinas en reacción al estímulo con el entorno.
El código base se centra en su estructura por variables de entrada, parte de reconocimiento de respuesta sensores, control de arranque delay de parada, control de velocidad y condicionales lógicos, todo para así generar una serie de rutinas de desempeño en el ring de combate.
La ingeniería inversa, según la escuela colombiana de ingenieros, busca comprender; estudiar o analizar un producto eléctrico, mecánico, software, etc.
Para comprender la ingeniería inversa, es pertinente partir de la holística, la cual permite comprender múltiples eventos desde diferentes perspectivas. De lo anterior, es posible afirmar que es posible Realizar, ingeniería inversa con el fin de estudiar o analizar el producto, para generar estrategias de enseñanza en pro a la formación de ingenieros y diseñadores, además de desarrollar habilidades y conocimientos técnicos.
Se elabora un método en el cual se relacionan objetivos comprendidos por la ingeniería inversa:
Diseño asistido por software
6. Ingeniería inversa
6.1. Método
Tener conocimiento previo del objeto de estudio.a)b)c) d)e)f)g)
Diseñar plan de investigación, con hipótesis y preguntas.Aplicación del planteamiento.Analizar la información generada.Generar un modelo (A), o sistema partiendo de los análisis.Demuestra por medio del modelo (A), las diferencias modelo (B).Definir su funcionamiento, aplicación y cómo podría implementarse en otros ambientes además de su mejora del producto.
Sumo bot
Sumo bot
Alimentación Actuadores
Modulo control Motores
Controlador Ejerce acciones
Entrada Salida
En esta sección se puede evidenciar el progreso, que el grupo Falcón cuyos integrantes, creadores de este proyecto, muestran debido a su participación en los diferentes torneos de robótica, además de ser los pioneros en la categoría sumo autónomo 3kg, en la corporación tecnología industrial colombiana, añadiendo que fueron los precursores para la creación de eventos desarrollados dentro de la institución.
7. Logros
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
11

Diseño y Construcción de un Sumobot
La robótica en entornos competitivos desarrolla diferentes competencias en un estudiante, que encaminado en un proceso de formación es enriquecedor para su proceso de formación. Del presente proyecto se concluye que el presentar entornos competitivos en un proceso de formación aumenta la capacidad de toma de decisiones y entre otras competencias, esto es evidenciado en las muestras de semillero que se presentan activamente por los estudiantes del instituto.
Las competencias fundamentales como análisis de problema, creatividad y decisión, son posibles desarrollar aplicando el método de ingeniería inversa, además de comprender manera sistemática un producto.Aplicando el método de manera ordenada se desarrolla un pensamiento analítico, además de aprender la manera de plantear hipótesis, comprender conceptos, validar y argumentar con solidez investigaciones.
El desarrollo del método como enseñanza para habilidades motrices del ingeniero, facilita el libre desenvolvimiento de prácticas electrónicas mecánicas y de diseño como actitudes fundamentales. El nivel académico del estudiante a través de las prácticas desempeñadas con el sumobot, crea valores de liderazgo y fomenta el trabajo en equipo adquiriendo disciplina.
Evento Ciudad
Rumanía
Ciudad de México
Ambato, Ecuador
México
Robo challenge Romania
Copa UTABOT 2020
Talent-land beca100%, Guadalajara
Concurso internacional guerra de robots 2020, instalaciones de Upita del Instituto politécnico nacional
8. Conclusiones
Logros obtenidos en el año 2019. Fuente: elaboración propia 2019
Tabla III
Barbadillo Villanueva, G. and Pina Calafi, A. (2012). Escuela técnica superior de ingenieros industriales y de telecomunicación - PDF. [online] Docplayer.es. Available at: http://docplayer.es/12373946-Escuela-tecnica-superior-de-ingenieros-industriales-y-de-telecomunicacion.html [Accessed 10 Sep. 2012].
REFERENCIAS
Barrientos, A, y Peñin, L, y Balaguer, C, y Aracil, R. (2007), en su libro: fundamentos de robótica.
Bravo, F, y Forero, A. (2012), según la tesis: La Robótica Como un Recurso Para Facilitar el Aprendizaje y Desarrollo de Competencias Generales, Pontificia Universidad Javeriana.
Estrada, J. En el texto: (sumo-bot 2014) Bibliografía: estrada, J. (2014). SUMOBOT. [Online] proyecto ciencias integradas PDF. Available at: http://vinculacion.dgire.unam.mx/Congreso-Trabajos-pagina/PDF/Congreso%20Estudiantil%202014/Proyectos%202014-%20%C3%81rea/2.%20Ciencias%20Fisicomatem%C3%A1ticas/mecatronica/5.2%20CIN2014A20038-%20Mecatr%C3%B3nica.pdf [Access Ed 9 Mar. 2014].
German, D, En el texto: (Goliat - Robot Del Instituto Tecnológico Metropolitano Para La Categoría De Sumo).
G. S. David. Goliat - Robot Del Instituto Tecnológico Metropolitano Para La Categoría De Sumo PDF. Available at: http://expoelectronica.upbbga.edu.co/pdf/pdf_2006_VIII/Goliat.
García-Cortez, J., Mireles-Medina, A., Montes Olguín, J. Y Carrillo-García, J. ResearchGate. En el texto: (García-Cortez et al., 2016)
García-Cortez, J., Mireles-Medina, A., Montes-Olguín, J. and Carrillo-García, J. (2016). ResearchGate. [Online] Repository.javeriana.edu.co. Available at: https://repository.javeriana.edu.co/bitstream/handle/10554/1458/PerezPertuzJohemir2011.pdf;jsessionid=45674EDB6172EC89222291A20637E69D?sequence=1 [Accessed 9 Nov. 2016].
Guzmán, S, y Muñoz, L, y Nelson, N. (2008), según la tesis: planificación de trayectorias para un robot tipo con restricciones dinámicas, universidad militar nueva granada, Bogotá, Colombia.
Kumar, S. (2010), según la tesis: introducción a la robótica, India Institute of Technology, México D.F.
Ollero. A. (2001), según el libro: robótica Manipuladores y Robots Móviles, escuela superior universitaria de Sevilla, España.
Rada. L, Orozco. V (2015), “Importancia de la Robótica Educativa en los procesos de enseñanza”. Universidad del Norte. Recuperado el [24/9/2017]: aprendizaje/pop_up?_101_INSTANCE_3Lkb_viewMode=print&_101_INSTANCE_3Lkb_languageId=es_ES. (martes 3 de noviembre del 2015).
Sánchez, E. (2012), según el libro electrónico: los robots.
Sánchez, E. (2012), según el libro: electrónica tecnología de los robots educativos.
Delfín, J. (2019), según la investigación de análisis, ingeniería inversa: metrología y aplicación.
Ramos, D, (2013), de la investigación, uso de la ingeniería inversa como metodología de enseñanza en la formación para la innovación.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
12

Proceso Automático Para la Selección de Botellas
En el presente proyecto se realiza el diseño y modelamiento de una maquina selectora de PETS, que tiene como objetivo seleccionar y clasificar de manera eficaz los plásticos específicamente los tipos PET en el área del reciclaje. La problemática, se centra principalmente en la mala selección de botellas al momento de reciclarlas ya que este sistema tiene un margen de error amplio o en su defecto se realiza de forma manual, por esto varias de estas botellas terminan en los botaderos, mares, montañas de basura, etc. Esta problemática genera gran preocupación a causa del cambio climático, efecto invernadero y demás problemas que traen las botellas tipo PET por su bajo grado de descomposición, este proyecto permitirá disminuir ese margen de error y así mismo aumentar la cantidad de botellas recicladas.
Palabras clave: PET, Reciclaje, Selección, Modelamiento, Diseño.
In this project, the design and modeling of a PETS selection machine is carried out, which aims to effectively select and classify plastics specifically PET types in the area of recycling. The problem is mainly focused on the poor selection of bottles at the time of recycling since this system has a wide margin of error or, failing that, is done manually, so several of these bottles end up in the dumps, seas, mountains of garbage, etc. This problem generates great concern because of climate change, greenhouse effect and other problems that PET bottles bring due to their low degree of decomposition, this project will reduce this margin of error and increase the amount of recycled bottles.
Keywords: PET, Recycling, Selection, Modeling, Design.
Dahian Alejandra Galvis CorreaIngeniería Mecatrónica, Estudiante Investigador Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Kevin Alfonso Gómez GonzálezIngeniería Mecatrónica, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Bryan Stiven Quiroga RodríguezIngeniería Mecatrónica, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Resumen
Abstract
Diseño y Modelamiento de un Proceso Automático Para la Selección de Botellas PET
Design and Modeling of an Automatic Process for the Selection of PET Bottles
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
13

Proceso Automático Para la Selección de Botellas
El PET (Tereftalato de polietileno, politereftalato de etileno, polietilentereftalato o polietileno Tereftalato) es un tipo de plástico muy utilizado en envases de bebidas, el cual fue elegido en la industria del envasado por su ligereza, resistencia, propiedades aislantes y también por su composición química, la cual permite cierto grado de regeneración. Este material tiene variedad de utilidades y ventajas como sus excelentes características para el reciclado, pero así mismo trae consigo un sin número de problemáticas.
Las botellas tipo PET utilizan para su elaboración el petróleo que es un recurso no renovable y altamente contaminante ya que requieren 24 millones de galones para producir tan solo 1.000 millones de botellas. Sin embargo, hay una problemática alrededor de este plástico aparte de los 700 años que tarda en degradarse y es su acelerada demanda y producción. El interés de las empresas productoras de alimentos, bebidas e incluso cosméticos, en este material hace que se incremente el impacto ambiental del plástico. Por otra parte, el porcentaje reciclado de estos recipientes respecto a su producción es muy bajo. (Revista SEMANA, 2016). Como solución a este problema se propone implementar una maquina encargada de seleccionar y separar de manera eficaz las botellas tipo PET a través de una línea de producción controlada por medio de nuevas tecnologías que permitan aumentar el porcentaje de botellas recicladas y mitigar el margen de error que afecta la eficacia en la industria del reciclaje. Esto se lleva a cabo gracias a la necesidad del ser humano por la supervivencia y preservación del medio ambiente. Aunque aún falta mucho por hacer para un eficaz proceso de reciclaje si se compara con países como Ecuador, que tiene una tasa alta de reciclaje. En Colombia el 74% de los envases va a parar a los rellenos sanitarios (Zarta, 2016).
Una gran parte de las botellas plásticas terminan en los diferentes ecosistemas, es afirmativo decir que estas transforman su medio en el que se involucran, ya que cuentan con una larga vida hasta su biodegradación (700 años), debido a la densidad del material, por lo cual desde semilleros de investigación de la Corporación Tecnológica Industrial Colombiana buscamos mitigar la poca eficacia de la recolección de estos elementos tipo PET, el proyecto desea implementa un diseño de maquina establecido bajo la investigación y selección rigurosa de elementos para facilitar el proceso de reciclaje a nivel industrial.
Desde el área de semilleros de la institución, Corporación Tecnológica Industrial Colombiana, se espera como resultado un diseño y construcción de un módulo a escala, el cual permita realizar el proceso de selección e identificación de las botellas plásticas. Implementando así una solución más eficaz que se encuentran actualmente en el país.
A lo largo del proceso de diseño y búsqueda de ideas para el desarrollo del proyecto físico se encontraron diversas opciones para la correcta aplicación y construcción de la máquina. Se tuvo que hacer un proceso de selección muy específico teniendo en cuenta los requerimientos y exigencias necesarios para llevar a cabo el proceso correcto del reciclaje el cual fue importante para determinar los elementos y partes que integrarían la máquina.
La basura tiene una llegada por toneladas en compactación ya sean en bolsas o sujetas por compresión, debido a la presión que ejerce el carro de la basura, tomando esto en cuenta se debía tener un segmento que se encargara de la contención de metros cúbicos de basura; se contó con un boceto inicial con apariencia de tolva para que la basura se almacenara y fuera separándose mediante un sistema vibratorio, la problemática que este diseño nos generó, fue la obstrucción que se causaba por el peso de la basura y los tamaños variables que se acumulaban en un punto, para resolverlo debíamos aplicar un más alto número de energía que chocara con el contenedor tipo martillo.
Mediante la indagación de este elemento se encontró nuevos modelos que resolvían este problema sin necesidad de más energía, un contenedor lateral que aprovechando la fuerza generada por un motor vibrador transmitía la energía en fuerzas de desplazamiento horizontal.
En este proceso encontramos que en la basura no solo se compone por solidos sino por una pequeña parte de fluidos o lixiviados, que hacen de esta una variable que fácilmente puede afectar a los siguientes componentes, por ende, teníamos que hallar una solución. Aprovechando la vibración del contenedor, la salida se seccionaría por canales con orificios que conducirían a los fluidos a un tanque.
La estructura se pensó con el fin de que resistiera un peso prudente para la basura y aislara las vibraciones de la máquina, para ello se mantuvo suspendida en resortes helicoidales y resortes transversales para disipar toda esa energía del sistema vibrador.
1. Introducción
2. Desarrollo
Análisis de requerimientos
2.1.1. Sistema de separación y distribución por vibración (Contenedor)
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
14

Proceso Automático Para la Selección de Botellas
En el sistema de transporte, se seleccionaron cintas transportadoras debido a su facilidad de acople a los diversos mecanismos y maquinarias, se hizo un cuadro comparativo en el cual se tomaron en cuenta factores, como resistencia a los residuos tanto líquidos como sólidos, fuerza del motor para la carga en cuestión de desplazamiento, fricción de rozamiento y calibre de la cinta, se escogió una cinta que con especificaciones de vulcanización, con tensor y con vena, esta cinta transportadora es una adaptación entre, las resistentes a la grasa y aceites, elevador y deslizantes (Group, 2010).
Se necesitan dos cintas para el proyecto, en donde una lleva una inclinación con un ángulo no mayor a 10 grados, en donde se va a dar la separación de lixiviados; en la segunda cinta transportadora no se necesita un ángulo de inclinación, esta es paralela al suelo. En la selección de los materiales, se realizó una investigación en donde se tomaron en cuenta factores calidad del material, diámetro de los rodillos, dimensiones de la banda como largo, ancho y alto (5 metros, 2.2 metros y 1.30 metros).
Para el sistema de selección se tuvieron en cuenta dos soluciones eficaces las cuales fueron:
Este sistema de selección se tomó en cuenta luego de hacer un estado del arte a profundidad y encontrar que la industria de los paquetes de papas fritas utilizaban este método de selección en sus líneas de producción, se hizo una investigación acerca de su costo y facilidad de implementación y construcción a la hora de determinar que los elementos neumáticos se seleccionaran adecuadamente y así mismo cumplieran con la presión y el caudal adecuado para la desviación de una botella de acuerdo a su peso teniendo en cuenta la presencia de otros elementos a su alrededor. En esta investigación no se encontró mucha información acerca de este sistema por tanto se empezó una construcción desde ceros en la cual se determinó la búsqueda de las válvulas, el compresor, los sistemas de expulsión, etc. Luego de determinar los elementos y marcas adecuadas se comenzó una serie de pruebas con elementos neumáticos marca FESTO tomados de la institución CORPORACIÓN TECNOLÓGICA INDUSTRIAL COLOMBIANA para así determinar la presión adecuada para desviar una botella tipo PET de 600ml, en el cual no se obtuvo buenos resultados ya que la presión manejara por la institución no era suficiente.
Esta fue la segunda opción al momento de escoger el sistema de selección ya que sus características cumplen con las exigencias requeridas para el sistema de selección de la máquina, de la misma forma se realizó una investigación para conocer así las ventajas y desventajas que traería implementar este sistema. En esta investigación se encontró demasiada información acerca de los robots paralelos y sus aplicaciones en la cual se encontró que el alcance de la velocidad para la que está diseñada este robot es la adecuada y la necesaria para la máquina; también se encontraron diferentes tipos de robots en el cual se decidió un tipo delta ya que maneja 3 grados de libertad los cuales son suficientes para realizar bien su tarea además de que estos robots están diseñados para cumplir con una alta precisión qué es lo que se necesita.
Por último, se optó por un sistema de selección por medio de robots paralelos ya que en la investigación se encontró que la precisión y la velocidad del robot es mayor además de que la información acerca de este sistema es más completa y eso facilita el proyecto y así reduce el tiempo de su elaboración para poder enfocarse en el objetivo central de la investigación.
Cabe resaltar que las especificaciones establecidas anteriormente están relacionadas con exigencias particulares de la máquina para que cumpla con los objetivos y también del ámbito industrial al que está enfocado.
En la indagación se determinaron los materiales, medidas, tecnologías y demás elementos que determinaran las condiciones físicas de las distintas secciones de la máquina.
2.1.1. Sistema de separación y distribución por vibración (Contenedor)
2.1.2.1. Sistema de selección (Neumática aplicada y robot paralelo)
2.1.2.1.1. Selección por neumática aplicada
2.1.2.1.2. Selección por medio de robot paralelo
2.1.3. Marco de referencia de materiales y tecnologías actuales para la construcción
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
15

Proceso Automático Para la Selección de Botellas
El diseño para el modelamiento del contenedor vibrador fue tomado por GENERAL KINEMATICS quienes tienen un largo trayecto en la construcción de sistemas vibratorios para las tolvas y sistemas de movimiento, este contenedor en nuestro caso tendría que acoplarse a nuestras necesidades, se adaptó para que soportara diez metros cúbicos de desechos, así que se estandarizo una medida en las paredes de contenedor.
2.1.3.1. Sistema de separación y distribución por vibración (contenedor)
2.1.4. Sistema de transporte (bandas transportadoras)
2.1.4.1. Cobertura superior
2.1.4.2. Tensiones
2.1.4.3. Diámetro tambores
Pistón vibrador: este instrumento ahorra la idea de tener que golpear con un martillo la tolva para que el material de su interior fluya, el inconveniente de esto es que la fuerza genera el pistón provoca a largo plazo una falla estructural grave por lo tanto se descartó y se tomó en cuenta el siguiente elemento
Motor vibrador: este consta de un eje desproporcional que cusa una vibración fuerte pero controlada, permitiendo un mejor rendimiento en el sistema, a esto se le debe aplicar para un mejor rendimiento una fijación con resortes helicoidales para que multipliquen la fuerza del sistema.
Esta capa protege el medio de la cinta la cual es de un material rígido, pero fácil de dañar.
Marca
Ancho
Espesor Superior
Carga rotura
Flexión (F)
Referencia
Longitud
Material
Carga trabajo
Contra flexión (C)
Espesor
Terminación
Acabado
Carga máxima
Valor Unitario
Dureza
Características
Esbelt
Tabla 1. Características generales
Tabla 2. Características Cobertura superior.
Tabla 3. Tensiones.
Tabla 4. Características Tambores.
Fuente: elaboración propia 2019
Fuente: elaboración propia 2019
Fuente: elaboración propia 2019
Fuente: elaboración propia 2019
2.2 metros
2.00 mm
200
80
Brenda 22 CF
5 metros
PVC
17
100
4.00 mm
Vulcanizado “sin fin”
Liso
25
$ 3.843.840 pesos
82
Antiestática, resistencia al aceite y grasas minerales, resistencia a la abrasión, resistente al corte.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
16
Proceso Automático Para la Selección de Botellas
Para el robot paralelo se seleccionó:
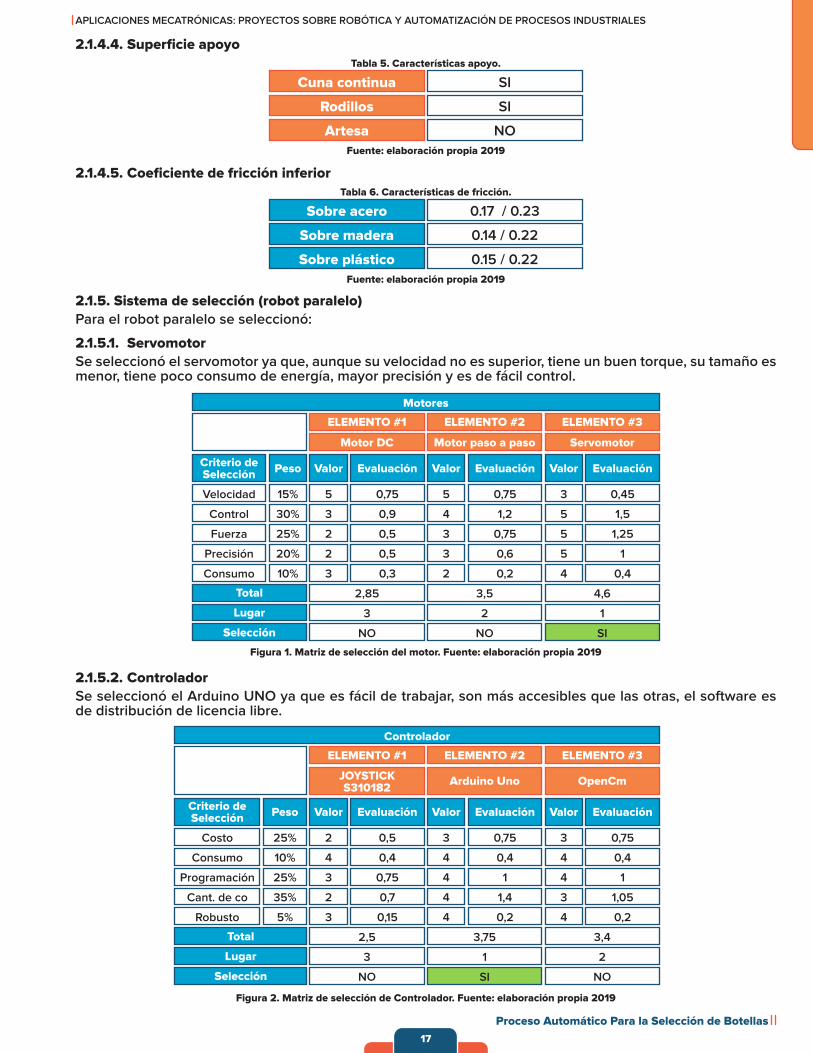
Se seleccionó el servomotor ya que, aunque su velocidad no es superior, tiene un buen torque, su tamaño es menor, tiene poco consumo de energía, mayor precisión y es de fácil control.
Se seleccionó el Arduino UNO ya que es fácil de trabajar, son más accesibles que las otras, el software es de distribución de licencia libre.
2.1.4.4. Superficie apoyo
2.1.4.5. Coeficiente de fricción inferior
2.1.5. Sistema de selección (robot paralelo)
2.1.5.1. Servomotor
2.1.5.2. Controlador
Cuna continua
Sobre acero
Rodillos
Sobre madera
Artesa
Sobre plástico
Tabla 5. Características apoyo.
Tabla 6. Características de fricción.
Fuente: elaboración propia 2019
Fuente: elaboración propia 2019
Figura 1. Matriz de selección del motor. Fuente: elaboración propia 2019
Figura 2. Matriz de selección de Controlador. Fuente: elaboración propia 2019
SI
0.17 / 0.23
Velocidad
Costo
0,75
0,5
0,75
0,75
0,45
0,75
15%
25%
5
2
5
3
3
3
Peso
Peso
Valor
Valor
Valor
Valor
Valor
Valor
Total
Total
Lugar
Lugar
Selección
Selección
Motores
Controlador
Motor DC
JOYSTICKS310182
Motor paso a paso
Arduino Uno
Servomotor
OpenCm
ELEMENTO #1
ELEMENTO #1
ELEMENTO #2
ELEMENTO #2
ELEMENTO #3
ELEMENTO #3
Criterio de Selección
Criterio de Selección
Evaluación
Evaluación
Evaluación
Evaluación
Evaluación
Evaluación
Control
Consumo
0,9
0,4
1,2
0,4
1,5
0,4
30%
10%
3
4
4
4
5
4
Fuerza
Programación
0,5
0,75
0,75
1
1,25
1
25%
25%
2
3
3
4
5
4
Precisión
Cant. de co
0,5
0,7
0,6
1,4
1
1,05
20%
35%
2
2
3
4
5
3
Consumo
Robusto
0,3
0,15
0,2
0,2
0,4
0,2
2,85
2,5
3,5
3,75
4,6
3,4
3
3
2
1
1
2
NO
NO
NO
SI
SI
NO
10%
5%
3
3
2
4
4
4
SI
0.14 / 0.22
NO
0.15 / 0.22
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
17
Proceso Automático Para la Selección de Botellas
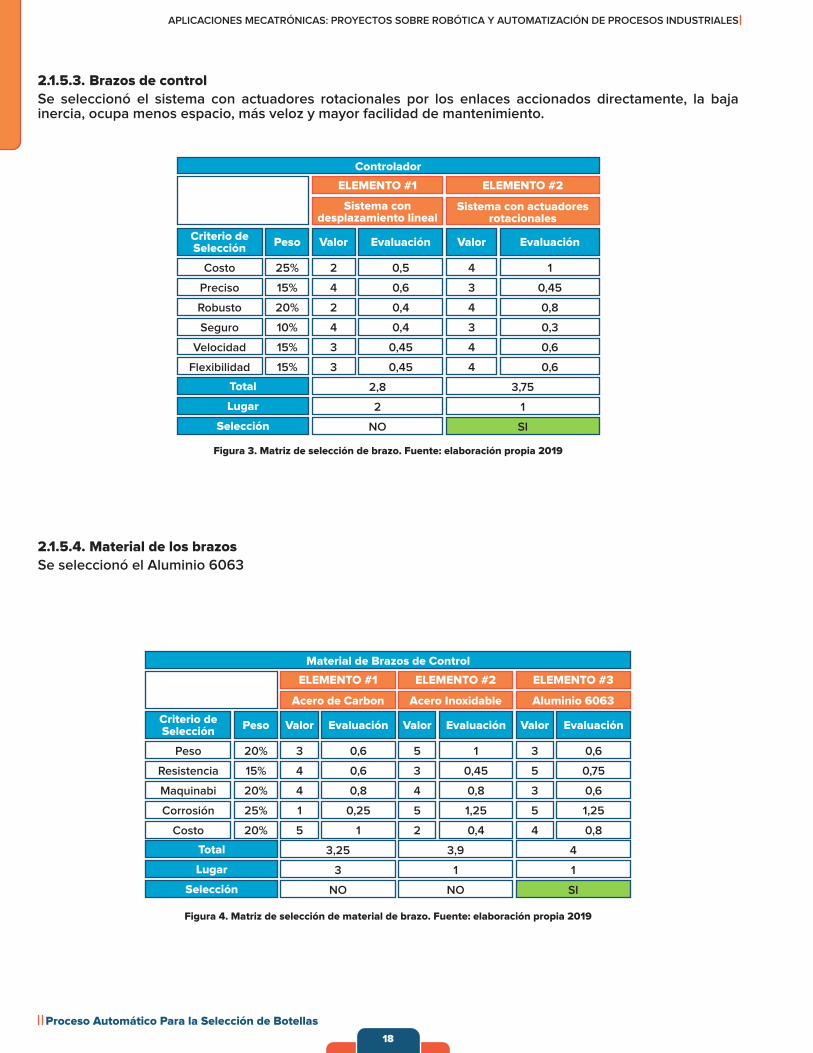
Se seleccionó el sistema con actuadores rotacionales por los enlaces accionados directamente, la baja inercia, ocupa menos espacio, más veloz y mayor facilidad de mantenimiento.
Se seleccionó el Aluminio 6063
2.1.5.3. Brazos de control
2.1.5.4. Material de los brazos
Costo 0,5 125% 2 4
Peso Valor Valor
Total
Lugar
Selección
Controlador
Sistema con desplazamiento lineal
Sistema con actuadores rotacionales
ELEMENTO #1 ELEMENTO #2
Criterio de Selección Evaluación Evaluación
Preciso 0,6 0,4515% 4 3
Robusto 0,4 0,820% 2 4
Seguro 0,4 0,310% 4 3
Velocidad
Flexibilidad
0,45
0,45
0,6
0,6
2,8 3,75
2 1
NO SI
15%
15%
3
3
4
4
Figura 3. Matriz de selección de brazo. Fuente: elaboración propia 2019
Figura 4. Matriz de selección de material de brazo. Fuente: elaboración propia 2019
Peso 0,6 1 0,620% 3 5 3
Peso Valor Valor Valor
Total
Lugar
Selección
Material de Brazos de Control
Acero de Carbon Acero Inoxidable Aluminio 6063
ELEMENTO #1 ELEMENTO #2 ELEMENTO #3
Criterio de Selección Evaluación Evaluación Evaluación
Resistencia 0,6 0,45 0,7515% 4 3 5
Maquinabi 0,8 0,8 0,620% 4 4 3
Corrosión 0,25 1,25 1,2525% 1 5 5
Costo 1 0,4 0,8
3,25 3,9 4
3 1 1
NO SINO
20% 5 2 4
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
18

Proceso Automático Para la Selección de Botellas
Se seleccionó la sección maciza
Se seleccionó la Rotula esférica ya que tiene 3 grados de libertad, son más precisas que las universales y tienen menos partes móviles.
2.1.5.5. Sección Transversal
2.1.5.6. Unión o junta
Ilustración 5. Matriz de selección de sección transversal. Fuente: elaboración propia 2019
Precisión
Peso
0,4
0,9
0,8
1,5
1
0,9
20%
30%
2
3
4
5
5
3
Peso
Peso
Valor
Valor
Valor
Valor
Valor
Valor
Total
Total
Lugar
Lugar
Selección
Selección
Uniones o Juntas
Sección Transversal
Junta universal
Sección maciza
Rótula esférica
Sección hueca
Junta de bola
Aluminio 6063
ELEMENTO #1
ELEMENTO #1
ELEMENTO #2
ELEMENTO #2
ELEMENTO #3
ELEMENTO #3
Criterio de Selección
Criterio de Selección
Evaluación
Evaluación
Evaluación
Evaluación
Evaluación
Evaluación
Costo
Resistencia
1,5
0,8
1,5
0,4
0,6
1
30%
20%
5
4
5
2
2
5
Rango
Rigidez
0,5
0,8
1
0,4
1,25
0,6
25%
20%
2
4
4
2
5
3
Facil ensamble
Costo
0,6
1,2
0,6
0,9
0,45
1,5
15%
30%
4
4
4
3
3
5
Durabilidad 0,4 0,4 0,4
3,4
3,7
3,9
3,2
3,7
4
3
3
1
2
2
1
NO
SI
SI
SI
NO
NO
10% 4 4 4
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
19

Proceso Automático Para la Selección de Botellas
2.1.5.7. Forma de la estructura
Ilustración 7. Matriz de selección de estructura Fuente: elaboración propia 2019
Ilustración 8. Planeación. Fuente: elaboración propia 2019
Facil construcción 1 0,6 0,620% 5 3 3
Peso Valor Valor Valor
Total
Lugar
Selección
Uniones o Juntas
ELEMENTO #1 ELEMENTO #2 ELEMENTO #3
Criterio de Selección Evaluación Evaluación Evaluación
Estructura 1 1 120% 5 5 5
Peso 1 0,4 0,620% 5 2 3
Robustez 0,8 1 0,820% 4 5 4
3,8 3 3
3 1 2
NOSI
Tomado dewww.electronics-lab.com
Tomado dewww.ieeeplere.ieee.org
Tomado dewww.marginallyclever.com
NO
Durante el proceso de diseño se dedicaron varias sesiones a la estructura de la maquina la cual siempre se dividió en 3 partes las cuales fueron: separacion y distribucion; transporte y selección; primeramente, se realizaron algunos dibujos los cuales nos permitieron fijar las partes y su distribución por el espacio, para luego así enfocarnos en cada una de ellas y profundizar en su diseño particular.
3. Diseño y simulación digital de la estructura física de la máquina - ingeniería de detalle de la creación. Diseño 3D
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
20

Proceso Automático Para la Selección de Botellas
Ilustración 9. Diseño de la base. Fuente: elaboración propia 2019
Ilustración 10. Diseño del contenedor. Fuente: elaboración propia 2019
Así mismo se realizaron los pasos con cada una de las secciones de la máquina para obtener como resultado final el modelamiento de las secciones de la máquina.
Durante la indagación se encontraron las estructuras físicas de como serían cada una de las partes y se adaptaron al proyecto. Para el contenedor y su base se realizó una sesión en la cual se especificaron sus partes y medidas aproximadas para así comenzar su modelamiento.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
21

Proceso Automático Para la Selección de Botellas
Bronchal, C. M. (2018). Diseño y desarrollo de una cinta para transporte de aridos.
REFERENCIAS
FRANKLIN, G. (2018). DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE ROBOT. Bogota.
Group, C. (2013). Chiorino. Obtenido de Chiorino: www.chiorino.comGroup, S. (Febrero de 2010). Savatech. Obtenido de Savatech: http://www.savatech.eu/pdf/transport/Bandas_Transportadoras.pdf
Revista SEMANA. (13 de 10 de 2016). Semana SOSTENIBLE. Obtenido de https://sostenibilidad.semana.com/negocios-verdes/articulo/plastico-pet-un-amigable-pero-no-inofensivo/36282
Santibañe, A. (25 de Agosto de 2013). SlideShare. Obtenido de SlideShare: https://es.slideshare.net/arvimar/bandas-transportadoras
Scheimer. (s.f.). Scheimer LTDA. Obtenido de Scheimer LTDA: www.scheimerltda.com
Zarta, D. S. (9 de Marzo de 2016). La Republica. Obtenido de La Republica: https://www.larepublica.co/responsabilidad-social/solo-26-de-las-botellas-plasticas-se-recicla-2357536
V. Andres, «Robótica Paralela: Aplicaciones Industriales, Modelado y Control,»Universidad del Cauca, Departamento de Electrónica, Instrumentación yControl, Popayán, Colombia.
J. D. Rueda Florez, «Metodologia para el diseño de un robot paralelo industrialtipo Delta,» Universidad Pontificia Bolivariana- Ingenieria Mecanica,Bucaramanga, 2008.
Galvis, J. B. (2011). FABRICACIÓN Y CONTROL DE POSICION DE UN ROBOT PARALELO TIPO DELTA CON 3 GRADOS DE LIBERTAD. Bucaramanga.
Hunter, A. (4 de Diciembre de 2013). Youtube. Obtenido de https://www.youtube.com/watch?v=1burGcyAv8o&feature=youtu.be
General Kinematics Corporation. (20 de Julio de 2016). Youtube. Obtenido de https://www.youtube.com/watch?v=awcCdWDzlew&feature=youtu.be
General Kinematics Corporation. (20 de Julio de 2016). Youtube. Obtenido de https://youtu.be/yrWP5OLz9H4
star trace. (s.f.). Youtube . Obtenido de https://www.youtube.com/watch?v=WrtqWpBkIGg&feature=youtu.be
General Kinematics Corporation. (2019). General Kinematics. Obtenido de https://www.generalkinematics.com/es/acerca-de/
El proyecto tuvo una parte fundamental, la adecuada separación de los desechos entre sí, eso aseguraba una mejor efectividad en la selección de los robots paralelos, por otra parte las canales de los lixiviados también fueron aprovechados para una organización lineal de la basura, lo cual hacia más eficiente el proceso de vibración, cuando el movimiento del motor es fuerte puede llegar a afectar los demás sistemas vinculados a la máquina, por ello se intentó disipar toda esta energía por medio de los amortiguadores, con ello cuidábamos la vida útil de los demás sistemas involucrados.
Durante la indagación realizada, conformada por consultas, entrevistas y practicas experimentales, el sistema de selección neumático se descartó por su dificultad en la trayectoria de salto y su baja precisión al corregir la trayectoria de la botella, ya que tras de ella arrastraba desechos ligeros, estos análisis fueron evaluados por ello se decide recurrir a una indagación en cuanto a métodos de selección en donde encontramos los robots paralelos, los cuales cuentas con una acción de recolección muy rápida y eficiente; Se seleccionó los robots paralelos por su velocidad y precisión en la selección de diversos elementos, estos incorporaron la visión artificial para calcular la trayectoria del elemento y poder extraerlos de la banda, encontramos dos modelos los cuales cambian sus grados de libertad, pero para un mejor funcionamiento se escogió el robot paralelo DELTA.
4. Conclusiones
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
22

Algoritmo Para Robots Sumos y Minisumos
La robótica hoy día hace mas parte de nosotros de lo esperado, ya sea en procesos industriales o en labores del hogar, en el futuro nos esperan grandes avances y cada día será más tecnología, nos debemos empezar a dar cuenta de lo necesario que es entenderla para usarla mejor o avanzar con ella y por eso se presenta esta solución hacia los nuevos desarrolladores, entre ellos los jóvenes para su nuevo saber.
El semillero de robótica presenta un método experimental-procedimental para que toda persona natural tenga mayor facilidad en entendimiento de las tecnologías en el proceso de los algoritmos de los robos sumos (fuente principal y desarrollo de semillero en nuevas tecnologías), esto permite ser un desarrollo y conocimiento más didáctico y novedoso para toda persona interesada.
Palabras clave: Algoritmos, robot, inteligencia artificial, Búsqueda dicotómica HIGH, LOW.
Robotics today makes more of us than expected, whether in industrial processes or in household chores, in the future great advances await us and every day it will be more technology, we must begin to realize how necessary it is to understand it to use it better or move forward with it and that is why this solution is presented to new developers, including young people for their new knowledge.
The seedbed of robotics presents an experimental-procedural method so that every natural person has greater ease in understanding the technologies in the process of the algorithms of the high robberies (main source and development of seedbed in new technologies), this allows to be a development and more didactic and innovative knowledge for every interested person.
Keywords: Algorithms, robot, artificial intelligence, dichotomous search HIGH, LOW.
Cristian Eduardo Malagón PinzónTecnología en Gestión de Procesos Mecatrónicos, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Miguel Ángel Pulido Quesada Tecnología en Gestión de Procesos Mecatrónicos, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Santiago Nicolas González TovarTecnología en Gestión de Procesos Mecatrónicos, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Resumen
Abstract
Explicación de un Algoritmo Para Robots Sumos y Minisumos, Aplicado Para la Enseñanza de la Mecatrónica en la Educación Superior
Explanation of an Algorithm for Sumos and Minisum Robots, Applied for the Teaching of Mechatronics in Higher Education
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
23

Algoritmo Para Robots Sumos y Minisumos
La programación es uno de los elementos esenciales en los componentes electrónicos y de los más viejos en explicarse, por este mismo motivo según (Cabello 2007) el método de enseñanza para programar está demasiado obsoleto para el siglo XXI. La robótica es una de las herramientas más útiles en nuestro entorno, con ella podemos evolucionar y entender cómo se comportan algunos elementos y adquirir nuevos beneficios. Por medio de una programación asignada a un robot se puede dar una orden para que se cumpla alguna función determinada y pueda hacer repetidamente sus procesos, pero ¿qué tan fácil es aprender la lógica de programación y los algoritmos?, es por lo cual nace la finalidad de elaborar este artículo de método de aprendizaje para que los estudiantes y las personas puedan tener una facilidad de manejar programas y contextos, por medio de unas herramientas que ayudan a entender y contextualizar esos logaritmos.(A.CHAIS n.d.).
Hoy en día estamos rodeado de máquinas que cumplen nuestras necesidades diarias y son capaces de generar tareas en menor tiempo y con mayor eficacia, gracias a la robótica y la inteligencia artificial, estas máquinas nos han facilitado actividades en el área laboral, en casa y demás, provocando que el personal tenga mayor conocimiento de estas mismas y su función de control para un buen manejo. Se busca implementar este conocimiento desde la educación básica, porque desde allí se cree que el conocimiento se avanza mucho más rápido con las nuevas tecnologías y así llevar un buen control de estas herramientas.
Se piensa implementar estas herramientas a personas que aún no tienen conocimiento de la programación y que piensan que es muy difícil realizarlo, sin embargo, podemos tomar el aprendizaje de los niños para que las personas se adapten a esos programas y que implementen esos conocimientos en sus vidas diarias.
En la elaboración del conocimiento científico pedagógico se utiliza una objetividad ontológica y una objetividad del procedimiento. La primera hace referencia a que los que investigan el campo educación y quieren percibir, entender y verificar la realidad que está realmente ahí afuera eliminando la percepción subjetivista, las creencias, la fantasía, la ideología o el deseo del investigador. Y la segunda, la objetividad de procedimiento, propone una forma particular de objetividad a través del desarrollo y utilización de un método que elimina, o aspira a eliminar, la incumbencia del juicio personal en la descripción y valoración de un estado de hechos.
Para esta investigación se utiliza el método inductivo ya que este cuenta con métodos de aprendizaje que utiliza como herramienta principal la inducción.
Se toma como referente para esta investigación a los actores de la medición pedagógica (M. MURRAY; V. BAJAR 2009):
A continuación, se enumerará los pasos a seguir para poder entender y programar un código en particular.
Se utilizan las aplicaciones a las tecnologías de aprendizaje (J. GONZALEZ 2018),(N. GARCIA; C. PEREZ 2015),(F. DIAZ 2015) , como método inductivo las cuales son:
1. Introducción
2. Problemática
3. Pedagogía a utilizada en métodos de investigación y aplicación para la enseñanza de la programación
4. Elementos de explicación
3.1. Método de Investigación
3.2. Método de aplicación
Facilitador - Estudiante.
TIC. (Tecnologías de Información y Comunicación).
Sociedad.
TAC. (tecnologías de Aprendizaje y Comunicación).
TEP. (Tecnologías de Emparedamiento y Participación).
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
24
Algoritmo Para Robots Sumos y Minisumos
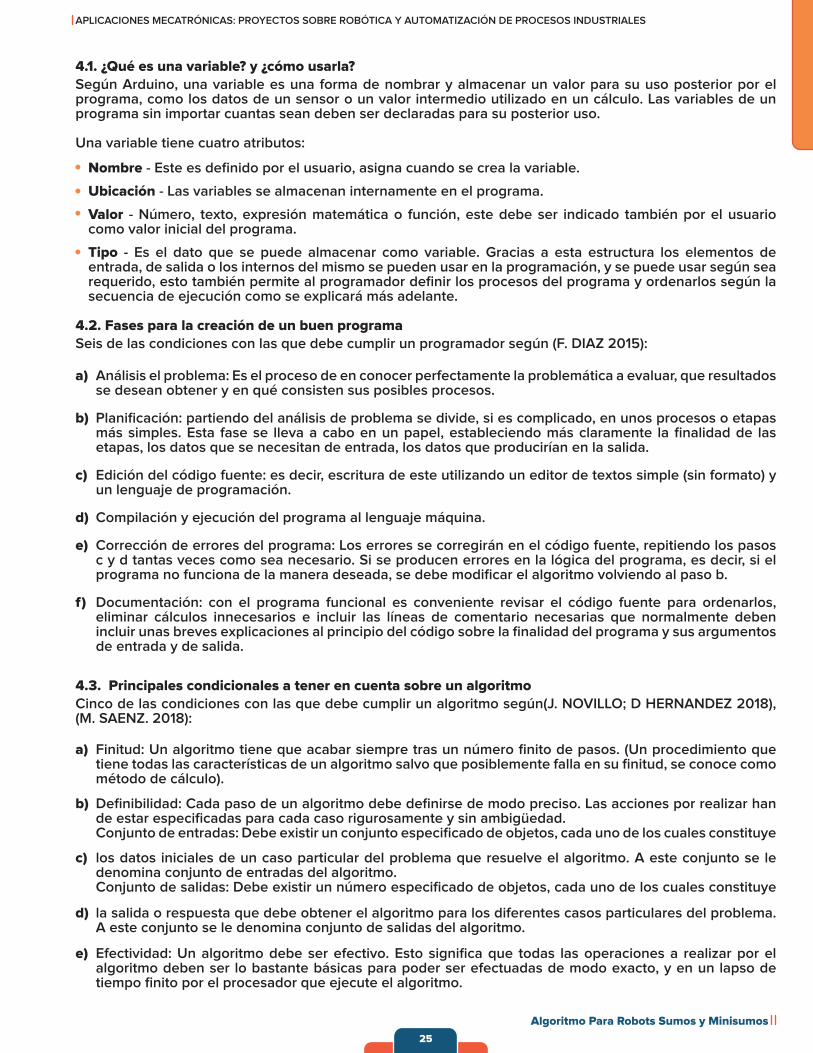
Según Arduino, una variable es una forma de nombrar y almacenar un valor para su uso posterior por el programa, como los datos de un sensor o un valor intermedio utilizado en un cálculo. Las variables de un programa sin importar cuantas sean deben ser declaradas para su posterior uso.
Una variable tiene cuatro atributos:
Seis de las condiciones con las que debe cumplir un programador según (F. DIAZ 2015):
Cinco de las condiciones con las que debe cumplir un algoritmo según(J. NOVILLO; D HERNANDEZ 2018), (M. SAENZ. 2018):
4.1. ¿Qué es una variable? y ¿cómo usarla?
4.2. Fases para la creación de un buen programa
4.3. Principales condicionales a tener en cuenta sobre un algoritmo
Nombre - Este es definido por el usuario, asigna cuando se crea la variable.
Ubicación - Las variables se almacenan internamente en el programa.
Valor - Número, texto, expresión matemática o función, este debe ser indicado también por el usuario como valor inicial del programa.
Tipo - Es el dato que se puede almacenar como variable. Gracias a esta estructura los elementos de entrada, de salida o los internos del mismo se pueden usar en la programación, y se puede usar según sea requerido, esto también permite al programador definir los procesos del programa y ordenarlos según la secuencia de ejecución como se explicará más adelante.
Análisis el problema: Es el proceso de en conocer perfectamente la problemática a evaluar, que resultados se desean obtener y en qué consisten sus posibles procesos.
Finitud: Un algoritmo tiene que acabar siempre tras un número finito de pasos. (Un procedimiento que tiene todas las características de un algoritmo salvo que posiblemente falla en su finitud, se conoce como método de cálculo).
a)
a)
Planificación: partiendo del análisis de problema se divide, si es complicado, en unos procesos o etapas más simples. Esta fase se lleva a cabo en un papel, estableciendo más claramente la finalidad de las etapas, los datos que se necesitan de entrada, los datos que producirían en la salida.
Definibilidad: Cada paso de un algoritmo debe definirse de modo preciso. Las acciones por realizar han de estar especificadas para cada caso rigurosamente y sin ambigüedad.Conjunto de entradas: Debe existir un conjunto especificado de objetos, cada uno de los cuales constituye
Edición del código fuente: es decir, escritura de este utilizando un editor de textos simple (sin formato) y un lenguaje de programación.
los datos iniciales de un caso particular del problema que resuelve el algoritmo. A este conjunto se le denomina conjunto de entradas del algoritmo.Conjunto de salidas: Debe existir un número especificado de objetos, cada uno de los cuales constituye
Compilación y ejecución del programa al lenguaje máquina.
la salida o respuesta que debe obtener el algoritmo para los diferentes casos particulares del problema. A este conjunto se le denomina conjunto de salidas del algoritmo.
Corrección de errores del programa: Los errores se corregirán en el código fuente, repitiendo los pasos c y d tantas veces como sea necesario. Si se producen errores en la lógica del programa, es decir, si el programa no funciona de la manera deseada, se debe modificar el algoritmo volviendo al paso b.
Efectividad: Un algoritmo debe ser efectivo. Esto significa que todas las operaciones a realizar por el algoritmo deben ser lo bastante básicas para poder ser efectuadas de modo exacto, y en un lapso de tiempo finito por el procesador que ejecute el algoritmo.
Documentación: con el programa funcional es conveniente revisar el código fuente para ordenarlos, eliminar cálculos innecesarios e incluir las líneas de comentario necesarias que normalmente deben incluir unas breves explicaciones al principio del código sobre la finalidad del programa y sus argumentos de entrada y de salida.
b)
b)
c)
c)
d)
d)
e)
e)
f)
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
25

Algoritmo Para Robots Sumos y Minisumos
Según (A.CHAIS n.d.), la Inteligencia Artificial es un superconjunto de tecnologías que engloba al propio Machine Learning (Aprendizaje propio de máquina) y se permite dividir en estas tres grandes ramas:
En la robótica móvil, como lo son los robots sumos y minisumos, pretenden generar un proceso de toma de decisiones, en el caso de los autónomos, por este motivo son tan importantes, los algoritmos, dado a que permiten el enlace de los elementos propios del robot como los del entorno y en determinado punto tomar la mejor decisión a tomar en el momento del “combate”, recordando que la necesidad de entender un programa depende del propio usuario, es necesario comprender los diferentes lenguajes de programación, en cuyo caso es importante y para este caso particular se utiliza lenguaje C++ y lenguaje estructurado por bloques.
El algoritmo necesario para este tipo de robots no es cosa del otro mundo, lo primero que se tiene que pensar como programador es si se desea generar un robot con capacidad más defensiva que ofensiva o viceversa, de esto también dependerán los componentes que se le quieran disponer al sumo o al deseo del programador, esto influirá en las prioridades al momento de la batalla y a la deposición del robot.
A continuación se presenta la forma del algoritmo en el lenguaje C++ utilizada para la explicación de esta metodología de enseñanza, teniendo encuentra que cada quien aprende de maneras diferente y que cada programador tiene sus métodos se presentara la estructura más básica y más simplificada en el orden considerado por el programa necesario para su buen funcionamiento separado por líneas de comentarios para poder mostrar la estructura y recordar que no puede ser modificada, pero si puede añadir o extraer información para realizar el manejo del programa necesidad y gusto del usuario:
(El Programa completo robot en lenguaje C++ está incluido como anexo).
En el arduino se pueden declarar las variables tanto globales como locales gracias a sus sistema y su lenguaje. Para este programa se declaran las variables de los motores diferenciando que pines pertenecen a cada uno de los motores, para la cantidad de motores que se deseen utilizar, es necesario activar dos variables debido a que por ser una bobina el motor permite una inversión de giro, por tal motivo se debe energizar de un pin y permitir el flujo de la corriente al otro pin, en el caso de los finales de carrera se declara a cual de los pines va a ser conectado cada uno de ellos.
En arduino es importante declarar si los pines de conexión son de entrada o de salida, esto nos permitirá leer o escribir sobre los elementos conectados a el, los pines de los motores son de escritura y la velocidad de la comunicación de los elementos.
Las estructuras de los elementos se deben tener muy en cuenta, tanto los signos de puntuación como los espacios, paréntesis y mayúsculas del lenguaje en este programa utilizado, siendo estos ya un estándar en el proceso de comunicación interna entre los elementos físicos como internos, en el caso del void setup es importante recordar que todo dentro de esta función se mantendrá activo de forma permanente pase lo que pase en el resto del programa, los paréntesis frente al comando representan que va a ser así y las llaves que todo lo interno a ellas se ejecutara o llamara desde cualquier punto para cumplir la función.
Se mostrará un paso a paso de una rutina de programación, lo cual esto puede variar según el tipo de programador.
4.4. Ejemplos de algoritmos
4.5. Herramientas de programación
5.1. Antes de programar
5.1.1. Declarar variables
5.1.2. Asignación de pines y función de cada uno de estos
5. ¿Cómo programar un robot sumo o minisumo?
Aprendizaje por refuerzo: Esta se refiere al aprendizaje mediante la iteración constante del programa basada en “prueba y error” que es capaz de realizar en tiempo récord ante determinadas condiciones o entorno dado.
a)
Aprendizaje supervisado: Se basa en modelos predictivos que hacen uso de datos de entrenamiento o previamente configurados, se pretende que el sistema sea capaz de lograr una determinada salida.
Aprendizaje no supervisado: son similares a los de aprendizaje supervisado, pero estos ajustan su modelo únicamente, el algoritmo realiza un auto entrenamiento sin indicaciones externas.
b)
c)
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
26

Algoritmo Para Robots Sumos y Minisumos
En determinadas ocasiones se necesita que una variable tenga un valor inicial como lo es el máximo potencial que da el arduino en salida, por tal motivo, la variable serial, indica como salida pero esta vez se pide que permanentemente en el funcionamiento del programa genere una salida para poder ser utilizada como energía para la conexión de los finales de carrera.
Para dar lectura de los finales de carrera se solicita al arduino de la lectura de cada uno de estos pines según se programaron como: frontal1, frontal2, lateral1d, lateral1i.
Este programa estará ejecutándose en un proceso de forma continua por medio de las condicionales if, que al español traduce (si), para esta acción se le solicita que lea su entorno en el que esta siendo examinado por los finales de carrera en este caso, al activarse uno de ellos o al no activarse se realizara el llamado de uno de las condicionales para enviar el respectivo cambio a las variables de los motores.
Para llamar una función es necesario meterla en un void, se llamara toda función dentro del void este dentro de sus paréntesis, esto, con el fin de no dañar o solicitar información no deseada, en la parte del código anterior, (condición de los if) se puede observar que vienen palabras nuevas, como lo son parar, derechaf entre otras, son estas las funciones que le piden al programa ser ejecutadas en el tiempo dispuesto a continuación o hasta que deje de ejecutarse la acción que ejerce su condicional.Las funciones se deben declarar después del void loop con el fin de que sean ejecutadas únicamente después de ser llamadas, estas, para este caso particular están condicionando a las salidas del Arduino con la finalidad de lograr el giro de los motores en el sentido deseado.
Con la finalidad de mostrar que las líneas de texto para ser llamadas no son tan robustas, se desea mostrar las otras configuraciones necesarias para una capacidad mayor de respuestas del robot sumo o minisumo.
¿Señal de arranque?
Adelante motor 1 y motor 2 por un milisegundo
Lectura contable de sensores
No
Si
Si Si
No
No No
5.1.3. Declarar a necesidad el valor inicial
5.1.4. Declaración de finales de carrera
5.1.5. Ejecución del programa
5.1.6. Llamado de funciones
Defensa de Robot Mini Sumo
Girar en su respectivo sentido
Activar funciones de motores: derecha 1 milisegundo, izquierda 1 milisegundo
Adelanta rapido motor 1 y motor 2
No da función
Atras motor 1 y Motor 2 por 4 milisegundos
¿Sensor piso 1 o sensor piso 2 cambian de señal?
¿Sensor lateralD o sensor laterall cambian de señal?
¿Sensor frontalD o sensor frontall o sensor ultrasonico
cambian de señal?
Figura 1. La estructura del programa es como se muestra en la figura: (diagrama de flujo). Fuente. Elaboración propia.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
27

Algoritmo Para Robots Sumos y Minisumos
Este es el minisumo con el cual se esta presentado el proceso de explicación del algoritmo, ese robot en especifico esta armado por medio de un arduino nado, sus finales de carrera por palanca, 2 motores de 400 rpms a 2 libras, un chasis comercial y un modulo puente H para los motores.
Como se puede observar en la Figura 2. Este es un prototipo de un minisumo, cuyas características tiene como función detectar o censar a otro prototipo del mismo, generando un contra ataque de golpe.
En la Figura 4. las partes laterales y delanteras del minisumo hay cuatro pulsadores o finales de carrera, en la cual tienen como función dar giro al momento en el que el otro minisumo lo choca reaccionando y sacándolo del dojo.
Y en la Figura 5. se pueden evidenciar un circuito dentro del minisumo, en el cual hace que funcione todas sus componentes para dicho trabajo y que se lleve a cabo un proceso determinado.
6. Presentación del robot minisumo
Figura 2. Ubicación de componentes fisicos del robot minisumo. Fuente. Elaboración propia.
Figura 3. Robot minisumo (Nucita). Fuente. Elaboración propia.
Figura 4. Imagen de los pulsadores (Nucita) Fuente. Elaboración propia.
Figura 5. Imagen vista superior (Nucita) Fuente. Elaboración propia.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
28

Algoritmo Para Robots Sumos y Minisumos
Como última instancia se muestra el proceso de los cableados realizado por el programa Tinkercad, este se muestra los pines del Arduino a el resto de los componentes según la configuración realizada en el programa, para simular los finales de carrera se conectan una botonera, en la secuencia del 1 al 4 correspondiente a los pines del programa de 9 a 12, las señales de los motores se conectan del pin 4 a 7, dos baterías de 9 voltios conectadas en serie sumando 18 voltios reducida con una resistencia de 610 ohmios y un l293d simulando el puente H utilizado en el montaje real.
La ventaja del programa online Tinkercad es que permite la enseñanza por dos medios el sistema de lenguajes de programación, código C++ y el sistema visual de bloques, en esta imagen se muestra un código de Blink el cual permite prender y apagar un led, en este caso el pin 13.
En esta imagen se muestra el programa de Blink simplificado en el lenguaje de bloques.
Figura 6. Imagen vista superior (Nucita) Fuente. Elaboración propia.
Figura 7. Ejemplo blink Fuente. extraido de Tinkercad. 2019
Figura 8. Ejemplo simplificado blink Fuente. extraido de Tinkercad.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
29

Algoritmo Para Robots Sumos y Minisumos
La investigación se apoyó en el uso de los programas como Arduino, Tinkercad entre otros softwares con metodologías de lenguajes y programación diferente en las que estamos implementando más conocimientos para mayor atención y generar más capacidades explicativas.
1 // Motor A2 3 int motorA1 = 4;4 int motorA2 = 5;5 6 //Motor B7 8 Int motorB1 = 6;9 Int motorB2 = 7;10 11 // Sensores finales de carrera12 13 int lateralD = 9;14 int frontal1 = 10;15 int frontal2 = 11;16 int lateralI = 12;17 18 // voltaje extra,19 20 int senal = 8;21 /****************************************/22 void setup () {23 24 Serial.begin (9600);25 26 pinMode (motorA1, OUTPUT);27 pinMode (motorA2, OUTPUT);28 pinMode (motorB1, OUTPUT);29 pinMode (motorB2, OUTPUT);30 31 pinMode (senal, OUTPUT);32 33 digitalWrite (senal, HIGH);35 pinMode (frontal1, INPUT);36 pinMode (frontal2. INPUT);37 pinMode (lateralD, INPUT);38 pinMode (lateralI, INPUT);
39 }40 /***************************************************/40 void loop () {4243 if ((frontal2 == LOW) && (frontal1 == LOW) &&44 (lateralI == LOW) && (lateralD == LOW));45 {parar (); delay (800);}46 == HIGH); {derecha f (); delay47 if (lateralD 48 (200);}
7. Subprogramas unidos a la ejecución del programa
8. Conclusiones
9. Anexo
Se concluye que la investigación guiara a las personas que no tienen ningún conocimiento sobre como programar o que es variable o como declarar una función. Además, hay pautas de cuál es la estructura de un robot minisumo.
Se cambio el lenguaje técnico por un lenguaje más coloquial para que cualquier público lo pudiese interpretar, se explica (con autores) por que el método de enseñanza que se tiene un método primitivo.
El uso de un diagrama de bloques fue bastante útil ya que cualquier persona podrá entender en que consiste la programación de robot minisumo.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
30

Algoritmo Para Robots Sumos y Minisumos
== HIGH); {izquif() ;delay(200);}49 If (lateralI 5051 if((frontal2==HIGH) || (frontal1==HIGH));52 {adelante (); delay (200);}5354 }55 /***************************************************/56 void atras () {57 58 Serial.println (“Hacia atrás”);59 digitalWrite (motorA1, LOW);60 digitalWrite (motorA2, HIGH);61 digitalWrite (motorB1, HIGH);62 digitalWrite (motorB2, LOW);63 } void adelante () {64 66 // Delante67 Serial.println (“Hacia delante”);68 digitalWrite (motor1, HIGH);69 digitalWrite (motoA2, LOW);70 digitalWrite (motorB1, LOW);71 digitalWrite (motorB2, HIGH);72 }73 void parar () {74 // stop75 Serial.println (“Paramos motores”);76 digitalWrite (motorA1, LOW);77 digitalWrite (motorA2, LOW);78 digitalWrite (motorB1, LOW);79 digitalWrite (motorB2, LOW);80 }81 void derechas () {82 // Derecha suave83 Serial.println (“Paramos motores”);84 digitalWrite (motorA1 , HIGH);85 digitalWrite (motorA2 , LOW);86 digitalWrite (motorB1 , LOW);87 digitalWrite (motorB2 , LOW);88 }89 void derechaf () { 90 // Derecha fuerte 91 Serial.println (“Paramos motores”);92 digitalWrite (motorA1, HIGH);93 digitalWrite (motorA2, LOW);94 digitalWrite (motorB1, HIGH);95 digitalWrite (motorB2, LOW);96 }97 void izquis () { 98 // Izquierda suave 99 Serial.println (“Paramos motores”);100 digitalWrite (motorA1, LOW);101 digitalWrite (motorA2, LOW);102 digitalWrite (motorB1 , HIGH);103 digitalWrite (motorB2 , LOW);104 }105 void izquif () { 106 // izquierda fuerte 107 Serial.println (“Paramos motores”);108 digitalWrite (motorA1, LOW);109 digitalWrite (motorA2, HIGH);110 digitalWrite (motorB1 , LOW);111 digitalWrite (motorB2 , HIGH);
112 }
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
31

Algoritmo Para Robots Sumos y Minisumos
A.CHAIS. n.d. “Tipos de Algoritmos de Inteligencia Artificial y Machine Learning.” Retrieved March 18, 2020 (https://www.auraportal.com/es/tipos-de-algoritmos-de-inteligencia-artificial-y-machine-learning/).
REFERENCIAS
Cabello, Roxana. 2007. “Medios Informáticos En La Educación Introducción.” (c).
F. DIAZ. 2015. “Experiencias de Aprendizaje Mediadas Por Las Tecnologías Digitales:: Pautas Para Docentes y Diseñadores Educativos de Frida Díaz Barriga Arceo - Libros En Google Play.” Retrieved March 18, 2020 (https://play.google.com/store/books/details/Frida_Díaz_Barriga_Arceo_Experiencias_de_aprendiza?id=ilN1DwAAQBAJ).
J. GONZALEZ. 2018. “Uso de Las Tecnologías En La Educación. El Auto-Aprendizaje Para Docentes de e-Learning de Jesús González Ornelas, Editorial Digital UNID - Libros En Google Play.” Retrieved March 18, 2020 (https://play.google.com/store/books/details/Jesús_González_Ornelas_Uso_de_las_tecnologías_en_l?id=fNRJDwAAQBAJ).
J. NOVILLO; D HERNANDEZ. 2018. “Arduino y El Internet de Las Cosas de Johnny Novillo-Vicuña, Dixys Hernández Rojas, Bertha Mazón Olivo, Jimmy Molina Ríos, Oscar Cárdenas Villavicencio - Libros En Google Play.” Retrieved March 18, 2020 (https://play.google.com/store/books/details/Johnny_Novillo_Vicuña_Arduino_y_el_Internet_de_las?id=FIlyDwAAQBAJ).
M. MURRAY; V. BAJAR. 2009. “25 Años de Informática Educativa En México: Miradas de Líderes y Pioneros de Marco Antonio Murray-Lasso, Victoria Raquel Bajar Simsolo, Juan Manuel Sánchez Morales, César Pérez Córdova, Yolanda Campos Campos, Patricia Ávila Muñoz, Germán Escorcia Saldarri.” Retrieved March 18, 2020 (https://play.google.com/store/books/details/Marco_Antonio_Murray_Lasso_25_Años_de_Informática?id=3KAvDwAAQBAJ).
M. SAENZ. 2018. “Curso Básico de Arduino de Misael Saenz Flores - Libros En Google Play.” Retrieved March 18, 2020 (https://play.google.com/store/books/details/Misael_Saenz_Flores_Curso_Básico_de_Arduino?id=lcBmDwAAQBAJ).
N. GARCIA; C. PEREZ. 2015. “Creación de Ambientes Digitales de Aprendizaje de Editorial Digital UNID - Libros En Google Play.” Retrieved March 18, 2020 (https://play.google.com/store/books/details?id=4d5PDwAAQBAJ).
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
32

Diseño Mecatrónico Como Didáctica de Enseñanza
El propósito del proyecto es enseñar la implementación de nuevas tecnologías enfocadas en el diseño mecatrónico como didáctica de enseñanza aplicando la elaboración de robots Minisumo para competencias e nivel distrital, y para esto se toma como referentes los textos: guía del estudiante para el aprendizaje del software SolidWorks (Dassault Systèmes, 2010), Arduino aplicaciones en robótica, mecatrónica e ingeniería (Reyes Cortés & Cid Monjaraz, 2015), taller de Arduino un enfoque práctico para principiantes (Tojeiro Calaza, 2015), temas de orientación profesional (TOP) práctico en electrónica (Durán Naranjo & Durán Naranjo, 2009), electrónica básica guía práctica (Arboledas Brihuega, 2011); Y el despliegue de temas que se verán a continuación en este texto serán: introducción, investigación, objetivos, enfoque educativo, hallazgos y conclusiones . el capítulo de investigación corresponde la información recopilada durante el segundo semestre de 2018 y hallazgos corresponde a la implementación metodológica en la cual se basa el presente proyecto; por último, después de las conclusiones se dan recomendaciones para que, los grupos de investigación pertenecientes al semillero de robótica en la institución TEINCO, determinen nuevas áreas de investigación que complementen aspectos que los límites de este proyecto no tiene implícitos en los objetivos.
Palabras clave: Minisumo robot; mecatrónica; SolidWorks; Arduino; software proteus.
The purpose of the project is to teach the implementation of new technologies focused on mechatronic design as teaching didactics applying the development of robots Minisumo for competitions and district level, and for this is taken as references the texts: student guide for learning SolidWorks software (Dassault Systèmes, 2010), Arduino applications in robotics, mechatronics and engineering (Reyes Cortés & Cid Monjaraz, 2015), Arduino workshop a practical approach for beginners (Tojeiro Calaza, 2015), topics of practical career guidance (TOP) in electronics (Durán Naranjo & Durán Naranjo, 2009), electronics basic practical guide (Arboledas Brihuega, 2011); and the deployment of topics that will be seen below in this text are: introduction, research, objectives, educational approach, findings and conclusions. The research chapter corresponds to the information gathered during the second semester of 2018 and findings corresponds to the methodological implementation on which this project is based; finally, after the conclusions are given recommendations so that the research groups belonging to the robotics seedbed in the institution TEINCO, determine new areas of research that complement aspects that the limits of this project does not have implicit in the objectives.
Keywords: Minisumo robot; Mechatronic; SolidWorks; Arduino; software proteus.
Wilmer Hernando Jiménez BarriosTecnólogo en gestión de procesos mecatrónicos, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
David Santiago Méndez GaitánTecnólogo en gestión de procesos mecatrónicos, estudiante investigador, Corporación Tecnológica Industrial Colombiana TEINCO [email protected]
Luis Felipe Alfonso EncisoTecnólogo en gestión de procesos mecatrónicos, estudiante investigador, Corporación Tecnológica Industrial Colombiana TEINCO [email protected]
Resumen
Abstract
Minisumo/ el Diseño Mecatrónico Como Didáctica de Enseñanza Aplicado a la Elaboración de Robots
Minisumo/ the Mechatronic Design as Didactical Teaching Applicable to the Elaboration of Robots
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
33
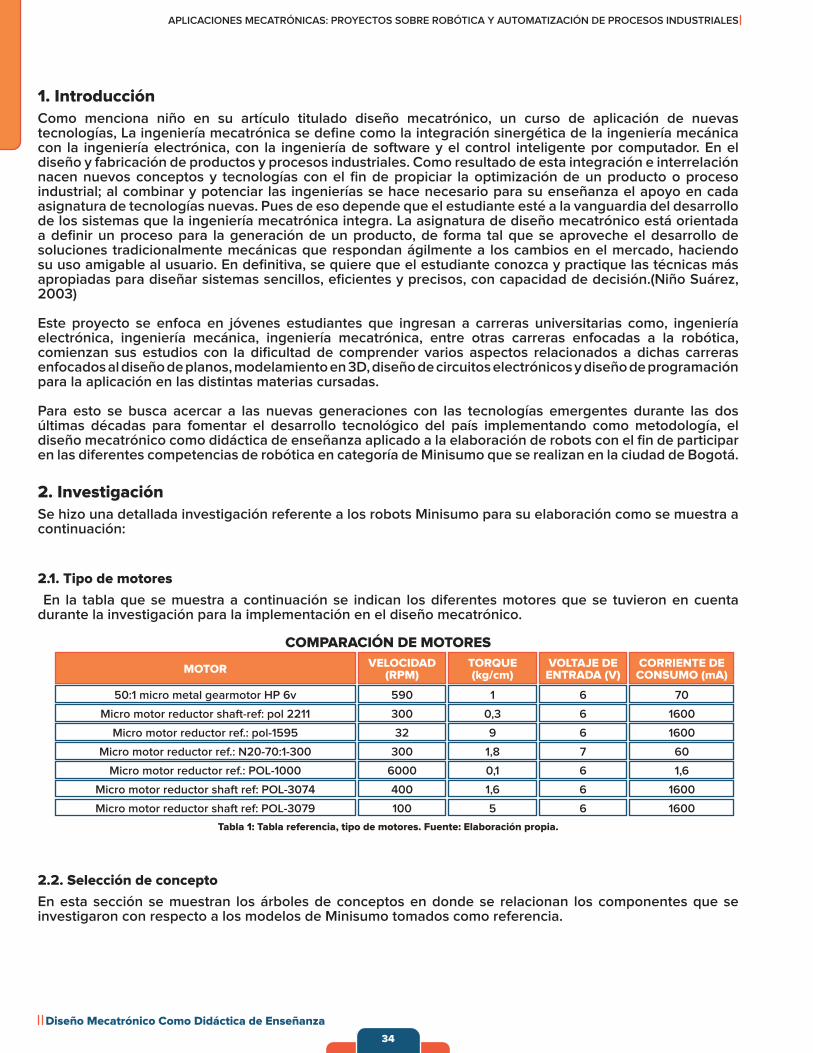
Diseño Mecatrónico Como Didáctica de Enseñanza
Como menciona niño en su artículo titulado diseño mecatrónico, un curso de aplicación de nuevas tecnologías, La ingeniería mecatrónica se define como la integración sinergética de la ingeniería mecánica con la ingeniería electrónica, con la ingeniería de software y el control inteligente por computador. En el diseño y fabricación de productos y procesos industriales. Como resultado de esta integración e interrelación nacen nuevos conceptos y tecnologías con el fin de propiciar la optimización de un producto o proceso industrial; al combinar y potenciar las ingenierías se hace necesario para su enseñanza el apoyo en cada asignatura de tecnologías nuevas. Pues de eso depende que el estudiante esté a la vanguardia del desarrollo de los sistemas que la ingeniería mecatrónica integra. La asignatura de diseño mecatrónico está orientada a definir un proceso para la generación de un producto, de forma tal que se aproveche el desarrollo de soluciones tradicionalmente mecánicas que respondan ágilmente a los cambios en el mercado, haciendo su uso amigable al usuario. En definitiva, se quiere que el estudiante conozca y practique las técnicas más apropiadas para diseñar sistemas sencillos, eficientes y precisos, con capacidad de decisión.(Niño Suárez, 2003)
Este proyecto se enfoca en jóvenes estudiantes que ingresan a carreras universitarias como, ingeniería electrónica, ingeniería mecánica, ingeniería mecatrónica, entre otras carreras enfocadas a la robótica, comienzan sus estudios con la dificultad de comprender varios aspectos relacionados a dichas carreras enfocados al diseño de planos, modelamiento en 3D, diseño de circuitos electrónicos y diseño de programación para la aplicación en las distintas materias cursadas.
Para esto se busca acercar a las nuevas generaciones con las tecnologías emergentes durante las dos últimas décadas para fomentar el desarrollo tecnológico del país implementando como metodología, el diseño mecatrónico como didáctica de enseñanza aplicado a la elaboración de robots con el fin de participar en las diferentes competencias de robótica en categoría de Minisumo que se realizan en la ciudad de Bogotá.
Se hizo una detallada investigación referente a los robots Minisumo para su elaboración como se muestra a continuación:
En la tabla que se muestra a continuación se indican los diferentes motores que se tuvieron en cuenta durante la investigación para la implementación en el diseño mecatrónico.
En esta sección se muestran los árboles de conceptos en donde se relacionan los componentes que se investigaron con respecto a los modelos de Minisumo tomados como referencia.
1. Introducción
2. Investigación
2.1. Tipo de motores
2.2. Selección de concepto
COMPARACIÓN DE MOTORES
Tabla 1: Tabla referencia, tipo de motores. Fuente: Elaboración propia.
50:1 micro metal gearmotor HP 6v
Micro motor reductor ref.: N20-70:1-300
590
300
1
1,8
6
7
70
60
Micro motor reductor shaft-ref: pol 2211
Micro motor reductor ref.: POL-1000
Micro motor reductor ref.: pol-1595
Micro motor reductor shaft ref: POL-3074
Micro motor reductor shaft ref: POL-3079
300
6000
32
400
100
0,3
0,1
9
1,6
5
6
6
6
6
6
1600
1,6
1600
1600
1600
MOTOR VELOCIDAD (RPM)
TORQUE (kg/cm)
VOLTAJE DE ENTRADA (V)
CORRIENTE DE CONSUMO (mA)
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
34

Diseño Mecatrónico Como Didáctica de Enseñanza
En los conceptos investigados se buscó información de los diseños más eficaces durante las competencias y estos fueron los que se escogieron:
Figura.1 Árbol Conceptual Concepto #1 Fuente: elaboración propia
Figura.2 Árbol Conceptual Concepto #2 Fuente: elaboración propia
Figura.3 Árbol Conceptual Concepto #3 Fuente: elaboración propia
Figura.4 Minisumo Circular Concepto #1 Fuente: (makerlabelectronics, 2015).
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
35

Diseño Mecatrónico Como Didáctica de Enseñanza
Figura.5 Minisumo Circular Concepto #2 Fuente: (tdrobotica, 2018).
Figura.6 Minisumo Circular Concepto #1 Fuente: (Braza, Contino, & Kenneson, 2015).
Tabla 2. Tabla referencia, componentes de conceptos #1. Fuente: Elaboración propia
Tabla 2. Tabla referencia, componentes de conceptos #2. .1 Concepto #2. Fuente: Elaboración propia
SUBCONJUNTO
SUBCONJUNTO
MICROMOTORES
MICROMOTORES
LINEA
LINEA
INFRARROJOS
INFRARROJOS
LISAS
LISAS
COMPONENTE
COMPONENTE
10 a 1
50 a 1
QTR-8A
QTR-1A
SHARP ANÁLOGO
ULTRASONICO
ESTANDAR
GRANDE
VALORACIÓN
VALORACIÓN
3.0
3.0
3.2
4.2
4.5
3.0
5.0
3.7
PROMEDIO
PROMEDIO
3.9
3.5
CONJUNTO
CONJUNTO
CONCEPTO #1
CONCEPTO #2
MOTORES
MOTORES
SENSORES
SENSORES
RUEDAS
RUEDAS
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
36

Diseño Mecatrónico Como Didáctica de Enseñanza
Tabla 2. Tabla referencia, componentes de conceptos #2. .1 Concepto #2. Fuente: Elaboración propia
Figura.7 Modelado 3D Minisumo Robot en Segmento Fuente: Elaboración propia
Figura.8 Modelado 3D Minisumo Fuente: Elaboración propia
SUBCONJUNTO MICROMOTORES LINEA INFRARROJOS LISAS
COMPONENTE 100 a 1 QTR-1A DIGITAL ESTANDAR
VALORACIÓN 4.0 4.7 4.2 5.0
PROMEDIO 4.5
CONJUNTO
CONCEPTO #3
MOTORES SENSORES RUEDAS
A continuación se motratá las estapas de diseño mecatronico las cuales son:
Basados en esta información se procede a realizar el primer diseño de un minisumo llegando a los siguientes parametros
3. Diseño
3.1. Modelado 3D
Modelado 3D
Circuito
Logica
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
37

Diseño Mecatrónico Como Didáctica de Enseñanza
La elaboración del circuito se basa en su mayoria al capitulo control de motores con arduino del libro taller de arduino. El circuito se simuló en el software proteus permitiendo determinar la cantidad de conexiones desde los componentes hacía el arduino, como tambíén permite saber si se debe modificar de alguna forma dichas conexiones que permita su adecuado funcionamiento.
int SharpDer = A0; int SharpIzq = A1; int QtrDer = A2;int QtrIzq = A3;int Sizq = 0;int Sder = 0;int Qder = 0;int Qizq = 0;int Mder1 = 9; //4;int Mder2 = 10; //5;int Mizq1 = 11; //6;int Mizq2 = 12; //7;int Led = 8;void setup() { // Definir los puertos de entrada y salida pinMode(Mder1, OUTPUT); pinMode(Mder2, OUTPUT); pinMode(Mizq1, OUTPUT); pinMode(Mizq2, OUTPUT); pinMode(Led, OUTPUT); digitalWrite(Led, HIGH); // set the LED on delay(5000); // Tiempo de Seguriadad}void loop() { sensores(); if((Sder<=300)&&(Sizq<=300)){adelante();} //elegir entre ir adelante o dar vueltas if((Sder<=300)&&(Sizq>=300)){izquierda();} if((Sder<=300)&&(Sizq<=300)){derecha();} if((Sder>=300)&&(Sizq>=300)){adelante();} if((Qder>=300)||(Qizq>=300)){atras();delay(200);derecha(); delay(200);} //eltiempo del delay depende de que tan rapido sea tu robot }void sensores (){ Sder = analogRead(SharpDer); delay(1); Sizq = analogRead(SharpIzq); delay(1);
3.2. Circuito
3.3. Código
Figura.9 circuito electrónico Fuente: Elaboración propia.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
38

Diseño Mecatrónico Como Didáctica de Enseñanza
En el código que se implementó, se determinó en la sección del “void setup” el tiempo reglamentario o tiempo de seguridad de 5 segundos. Adicional se asignó como estrategía que al iniciarse la secuencia, el robot espere el robot (estrategía defenciva) y que al estar el adversario a una distancia de entre 10 a 80 centimetros de distancia, él buscará ese robot para generar empuje con sus 4 motores, de tal manera que pueda sacarlo del dojo de competencia.
Qder = analogRead(QtrDer); delay(1); Qizq = analogRead(QtrIzq); delay(1); }void adelante(){digitalWrite(Mder1, HIGH);digitalWrite(Mder2, LOW);digitalWrite(Mizq1, HIGH);digitalWrite(Mizq2, LOW);}void atras(){digitalWrite(Mder1, LOW);digitalWrite(Mder2, HIGH);digitalWrite(Mizq1, LOW);digitalWrite(Mizq2, HIGH);}void parar(){digitalWrite(Mder1, LOW);digitalWrite(Mder2, LOW);digitalWrite(Mizq1, LOW);digitalWrite(Mizq2, LOW);}void derecha(){digitalWrite(Mder1, LOW);digitalWrite(Mder2, LOW);digitalWrite(Mizq1, HIGH);digitalWrite(Mizq2, LOW);}void izquierda(){digitalWrite(Mder1, HIGH);digitalWrite(Mder2, LOW);digitalWrite(Mizq1, LOW);digitalWrite(Mizq2, LOW); }
Se plantea en este proyecto, como cimiento para la parte metodológica del mismo, lo que se indica en el siguiente texto:
Se tiene en cuenta para la parte metodologica del proyecto lo que se menciona en el texto metodologia para la enseñanza y el aprendizaje según (Escarabajal et al., 2016) En cuanto a la estrategia metodológica a seguir por parte del profesorado, dependerá del método docente. El método docente es, según la definición propuesta por De Miguel (2004:36) el “conjunto de decisiones sobre los procedimientos a emprender y sobre los recursos a utilizar en las diferentes fases de un plan de acción que, organizados y secuenciados coherentemente con los objetivos pretendidos en cada uno de los momentos del proceso, nos permiten dar una respuesta a la finalidad última de la tarea educativa”. Por lo tanto, el método se concreta en una variedad de modos, formas, procedimientos, estrategias, técnicas, actividades y tareas de enseñanza y aprendizaje.(Escarabajal et al., 2016)
De esta sección del texto se implementa el siguiente enfoque metodológico:
El enfoque de la socialización didáctica, que se centra en la dimensión social del proceso didáctico y los modelos de enseñanza, como son:
4. Metodología
La tutoría entre iguales. Un estudiante más aventajado enseña a otro que lo es menos, bajo la supervisión del profesor. Modalidades de enseñanza centradas en el desarrollo de competencias.(Escarabajal et al., 2016)
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
39

Diseño Mecatrónico Como Didáctica de Enseñanza
Esto en cuanto a la metodología que se aplicará para el grupo que se manejará dentro de la institución TEINCO. Y para el grupo externo a la institución que se manejará en el centro cultural Masaharu, se implementará de la siguiente forma:
La lección tradicional o logocéntrica. Se polariza en el docente y queda determinado fundamentalmente por el objeto a transmitir. El profesor monopoliza las iniciativas y la enseñanza se vehicula a través del lenguaje oral que se imparte para que todos los alumnos aprendan en bloque y a un ritmo que todos han de seguir. (Escarabajal et al., 2016).
Esto último mediante talleres como se explica a continuación.
Para la implementación de este proyecto, en principio los autores se percataron de algunas problemáticas que, como vivencia personal, les llevó a implementar una solución para la problemática que se les presentó al comenzar la carrera de ingeniería mecatrónica, pues en principio no se conocían los aspectos o herramientas virtuales básicas como Arduino o SolidWorks que durante el proceso educativo de sus propias carreras, serian importantes para la implementación de proyectos básicos que afianzaran sus conocimientos durante la carrera de ingeniería mecatrónica, así mismo se tiene en cuenta la dificultad de los estudiantes para hallar por si mismos metodologías de estudio adecuadas para el correcto aprendizaje en cuanto al estudio de dichas herramientas virtuales. Por lo que se plantea, en base a lo aprendido en el semillero de investigación de robótica educar respecto a estos temas a los estudiantes que aún no ingresan a una carrera universitaria afín a la robótica para darles a conocer estas importantes herramientas para sus futuras carreras, por tal motivo se buscó la implementación de este proyecto.
Como plan piloto se hizo la implementación de este proyecto en la colaboración de la construcción de un robot Minisumo de competencia con los estudiantes de primer semestre en ingeniería mecatrónica de la facultad de mecatrónica en la corporación tecnológica industrial colombiana TEINCO.
En la anterior fotografía se pueden ver algunos robots tanto de los estudiantes de primer semestre como de los autores del texto que colocaron como ejemplo su propio Minisumo robot para guiar a sus compañeros en la implementación de este proyecto.
Figura.8 Fotografía referencia de plan piloto (2019 primer semestre) Fuente: Elaboración propia
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
40

Diseño Mecatrónico Como Didáctica de Enseñanza
En esta otra fotografía se observa a los participantes del plan piloto bastante animados por el aprendizaje, pues era la primera vez para la mayoría de ellos que llevaban a cabo la elaboración de un robot Minisumo.El plan piloto consistió en hacer que los estudiantes aplicaran sus conocimientos de matemática y física aprendidos en colegio, como también los conocimientos que empezaban a adquirir en la institución de educación superior, fue entonces que se les guio paso a paso para el diseño mecatrónico como didáctica de enseñanza aplicado a la elaboración de robots.
Figura.10 circuito electrónico Fuente: Elaboración propia.
Figura.11 Imagen referencia, modelamiento de Minisumo robot en programa SolidWorks. Fuente: Elaboración propia.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
41

Diseño Mecatrónico Como Didáctica de Enseñanza
Dentro del diseño mecatrónico del robot, se tuvo en cuenta la parte de modelamiento 3D en el software SolidWorks, y el apoyo del texto: guía del estudiante para el aprendizaje del software SolidWorks (2011).
En el diseño electrónico se tuvo en cuenta los parámetros de electrónica básica de los libros: temas de orientación profesional (TOP) práctico en electrónica (2009), y electrónica básica guía práctica (2011).
En el diseño de la programación se manejaron los parámetros de los libros: Arduino aplicaciones en robótica, mecatrónica e ingeniería (2015), taller de Arduino un enfoque practico para principiantes (2015).
Se daba a los estudiantes dos horas semanales de instrucciones y acompañamientos en la elaboración del Minisumo robot durante el semestre, impartiendo de forma específica el uso de herramientas virtuales como Arduino y SolidWorks que les permitió llevar a la práctica de una mejor manera sus ideas para la elaboración del robot.
Una segunda implementación del plan piloto para el desarrollo de este proyecto fue la realización de talleres relacionados al diseño mecatrónico de robots, pero en este caso fue en el centro cultural Masaharu ubicado en la localidad de Bosa – Bogotá – Colombia, en donde se explicaban aspectos importantes de la robótica y la electrónica.
En el primer taller de robótica se les explico a los asistentes parte de la historia de la robótica, eventos más relevantes de la robótica en las últimas 5 décadas y las diferentes aplicaciones de la robótica hoy en día:
En el primer taller de electrónica básica se explicó la ley de ohm, circuito en serie, paralelo y mixto.
Por último, en la muestra de robots Minisumo se explicó el proceso que tuvo el grupo de 15 personas para la elaboración de los robots y posteriormente, de forma general se explicó el funcionamiento y reglamentación para Minisumo robots en competencias.
Se contextualiza al grupo externo, con información del reglamento para la categoría de robots Minisumo en competencia.
Especificaciones del Robot:
a)
b)
c)
a)
b)
c)
Un robot no puede causar daño a un ser humano ni, por omisión, permitir que un ser humano sufra daños.
Un robot debe obedecer las órdenes dadas por los seres humanos, salvo cuando tales órdenes entren en conflicto con la Primera Ley.
Un robot ha de proteger su existencia, siempre que dicha protección no entre en conflicto con la Primera o la Segunda Ley. (Redondo, n.d.)
El robot no debe exceder las dimensiones de 10cm X 10cm, altura libre, no habrá tolerancia.
El robot no debe exceder los 500g de peso, no habrá tolerancia.
El robot deberá ser de tipo autónomo.
Figura.12 Imagen referencia, primera muestra de robótica (Minisumo). Fuente: Elaboración propia.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
42

Diseño Mecatrónico Como Didáctica de Enseñanza
Con los robots de muestra se hace una pequeña competencia siguiendo el reglamento para esta categoría compartiendo el trabajo de los estudiantes del grupo interno de TEINCO.
5. Hallazgos
6. Recomendaciones
En la primera población que se manejó se tuvo aceptación en cuanto a la implementación del proyecto por parte de los estudiantes en cuestión pues, como se mencionó anteriormente, para muchos de ellos era la primera vez que se daba la oportunidad de trabajar en equipo para la elaboración de un robot de competencia, aplicando las herramientas virtuales como el software SolidWorks para el modelamiento 3D, el software proteus para el diseño electrónico, y el software del entorno Arduino para el diseño de la programación del robot, manteniendo la sinergia de los tres conceptos durante el proceso de elaboración.
En la segunda población que se manejó también se tuvo acogida del proyecto por parte de las personas asistentes a los talleres del centro cultural, pues a diferencia de la primera población, en la segunda población, muchos de ellos no tenían ningún tipo de acercamiento a la robótica educativa y era la primera vez que se les explicaba este tipo de tecnologías.
Aunque los límites del Proyecto al comienzo estaban dirigidos a la educación media, en la implementación de una metodología para la enseñanza enfocada en robótica, de forma externa a la institución, personas que no pertenecen a la población de educación media, se muestran interesadas por recibir talleres relacionados con robótica de competencia dirigida a la elaboración de robots Minisumo.,
Figura.13 Fotografía de referencia, personas asistentes al taller de robótica. Fuente: Elaboración propia.
El robot debe tener un switch de encendido y apagado, visible y de fácil acceso en caso de emergencia.
El robot debe tener un módulo de arranque estándar para que el juez pueda activar los robots. El módulo es de uso obligatorio.
El robot no deberá poseer una cuenta de tiempo de seguridad de cinco (5) segundos.
El robot de minisumo NO puede tener imanes o similares que ayuden a fijar el robot a la pista.
El robot puede desplegar componentes una vez iniciado el combate. (Runibot, 2020).
d)
e)
f)
g)
h)
Reglamento que define activación de robot mini sumo, estableciendo en la programación un tiempo de seguridad de 5 segundos (delay), se está reemplazando en las competencias por código de programación que incluya módulo de arranque para activación del robot Minisumo a distancia mediante mando control infrarrojo.
Interés por parte de estudiantes en la facultad de mecatrónica pertenecientes a otros niveles académicos para la implementación de esta metodología de enseñanza aplicando la elaboración de robots Minisumo u otro tipo de robots.
También se recomienda una constante actualización en la cotización de los materiales para no afectar el desarrollo de la implementación del proyecto al momento de realizar la adquisición de dichos materiales.
Los limites del proyecto no derivan en el análisis cuantitativo y cualitativo del proceso y sus resultados, por lo que se puede explorar la implementación de dicho análisis.
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
43
Diseño Mecatrónico Como Didáctica de Enseñanza
7. ConclusionesSe realizó el modelamiento en 3D del robot Minisumo con el programa SolidWorks, Para determinar las dimensiones físicas y las conexiones electrónicas de los componentes utilizados para el funcionamiento del prototipo con el programa proteus.
Se implemento el código de programación con base en el reglamento de la categoría Minisumo, agregando estrategias para la activación del robot.
Se Implemento una metodología de enseñanza aplicando la elaboración de robots Minisumo para el grupo de estudiantes de primer semestre (2019) en ingeniería mecatrónica de la institución TEINCO y grupo de personas asistentes a talleres del centro cultural Masaharu.
Se Construyó un Minisumo capaz de mantenerse dentro del área de competencia y variar sus movimientos para atacar al robot adversario.
Se enfocó la metodología de enseñanza para el grupo del centro cultural, en talleres que contextualizara a las personas interesadas en robótica, con conceptos básicos como electrónica, programación y diseño computarizado; cada tema en semanas distintas teniendo en cuenta el espacio y cronogramas establecidos por el centro cultural Masaharu.
Se modificó en el diseño electrónico mediante el software proteus, el uso de sensores infrarrojos análogos, sustituyéndolos por potenciómetros para poder referenciar en la simulación a dichos sensores debido a que el software proteus no cuenta con librerías para sensores infrarrojos, y se dificultó la adquisición de dichas librerías en internet.
Se complementó la enseñanza en cuanto a programación en el entorno Arduino, no solamente con los libros referenciados en el proyecto, sino que también se cuenta con la experiencia y conocimiento de algunos estudiantes en el grupo al cual se implementó el proyecto, ya que dichos estudiantes tenían la ventaja de haber adquirido algunos conceptos previos del entorno Arduino fuera de la institución (TEINCO) para comenzar la carrera de ingeniería mecatrónica, de tal forma que se afianzó sus conocimiento de una forma más técnica.
Se evidenció una considerable variación en los precios de los materiales desde el momento de la investigación hasta el momento de la implementación en la construcción del robot Minisumo, esto considerando que hubo una diferencia de año y medio, por lo cual se cotizaron nuevamente los materiales.
De, U., España, Z., Domínguez, F., & Rosario, M. (2006). Metodología Participativa En La Enseñanza Universitaria. In Revista Interuniversitaria de Formación del Profesorado (Vol. 20, Issue 3). http://www.redalyc.org/pdf/274/27411311016.pdf
REFERENCIAS
Escarabajal, J. A., Fernández, J. C., González, B., Jiménez, R., Lanchares, C., López, B., Matarranz, M., Munilla, M., Sánchez, A., & Villalonga, C. (2016). Metodología de enseñanza y para el aprendizaje. 136.
Gil Pérez, D. (1986). La metodología científica y la enseñanza de las ciencias: unas relaciones controvertidas. Enseñanza de Las Ciencias: Revista de Investigación y Experiencias Didácticas, 4(2), 111–121.
Runibot. (2020). Reglamento Robot Mini-Sumo. https://1b1567d2-5c40-4ff0-9c39-98d7de732890.usrfiles.com/ugd/33c665_d3e3721bba8a4f5e97588a0aaf5c1997.pdf
Redondo, M. (n.d.). El hombre que inventó las leyes de la robótica. 2017. https://hipertextual.com/2017/01/isaac-asimov-roboticaTdrobotica. (n.d.). tdrobotica Chasis Minisumo. http://tdrobotica.co/tdrobotica-chasis-minisumo/1025.html
Rubín Martín, A. (2017). Los 6 Pasos del Método Científico y sus Características - Lifeder. https://www.lifeder.com/pasos-metodo-cientifico/Contino, B., Torgerson, Q., Kenneson, J., & Braza, J. (2015). MINI SUMO 2015. http://pittras.org/projects/2015-minisumo/
Makerlab-electronics. (2015). Robot Chassis Kit Mini Round 3 Layer 2WD with DC Motors. https://www.makerlab-electronics.com/product/robot-chassis-kit-mini-round-3-layer-2wd-with-dc-motors/
Reyes Cortés, F., & Cid Monjaraz, J. (2015). Arduino, Aplicaciones en robótica, mecatrónica e ingenierías (Alfaomega (ed.)).
Tojeiro Calaza, G. (2015). Taller de Arduino (Alfaomega (ed.)). http://arduineando.matem.unam.mx/proyectos/controlCargaTransistorArboledas Brihuega, D. (2011). Electrónica básica, guía práctica (E. LA U (ed.)).
Durán Naranjo, J., & Durán Naranjo, E. (2009). Temas de Orientacion Profesional Práctico en electrónica (Durán (ed.)).
Niño Suárez, P. A. (2003). Diseño mecatrónico, un curso de aplicación de nuevas tecnologías. Ciencia e Ingeniería Neogranadina, 13(1), 61–70. https://doi.org/10.18359/rcin.1338
Dassault Systèmes. (2010). Guía del estudiante para el aprendizaje del software SolidWorks ®. http://www.solidworks.com/education
Robles Idrovo, G. A., & Vaca Barberán, G. E. (2017). Implementación de dos robots mini sumos utilizando sistemas de radio control “SABERTOOTH” y dispositivos de comunicación inalámbrica “BLUETOOTH”. Universidad Católica de Santiago de Guayaquil.
G. Angeles, B. Simón, D. Salazar, L. S. (2017). MINI-SUMO. Universidad Autónoma Del Estado de Hidalgo.
Martínez Magallón, G. (2011). Diseño, programación y uso de minirobots para competiciones robóticas [Universidad Pública de Navarra]. https://hdl.handle.net/2454/3483
Ramírez Campoverde, J. C. (2018). Implementación de algoritmo de lógica difusa utilizando el microcontrolador Atmega 32u4 como estrategias de lucha en la categoría minisumo. UNIVERSIDAD CATÓLICA DE SANTIAGO DE GUAYAQUIL.
Mont Lukacs, M. Á., Sevilla Flores, J., & León Romero, J. P. (2017). (PDF) Diseño, construcción y programación de un robot minisumo con Arduino. Researchgate. https://www.researchgate.net/publication/321571850_Diseno_construccion_y_programacion_de_un_robot_minisumo_con_Arduino
Santiago, D., Guayaquil, D., Miguel, N., Ávila, V., Luis, J., Ponce, V., De Titulación Previo, T., Obtención Del Título De, L., Meléndez, P., & Guayaquil, E. F. (2016). Diseño e implementación de dos robots móviles autónomos para la batalla de robots minisumo y microsumo [UNIVERSIDAD CATÓLICA DE SANTIAGO DE GUAYAQUIL]. http://repositorio.ucsg.edu.ec/bitstream/3317/6614/1/T-UCSG-PRE-TEC-ITEL-172.pdfMartí Funollet, A. (1000). Robot de minisumo. https://upcommons.upc.edu/handle/2117/83317
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
44

Propuesta de Reincorporación Brazo Robótico
El brazo robótico Mitsubishi RV-M1, es un robot articulado de cinco (5) ejes rotacionales más un (1) gripper como herramienta de trabajo, es un producto esencialmente didáctico para el aprendizaje e investigación en la asignatura de robótica, mecánica, programación, entre otras áreas del conocimiento. El robot se constituye básicamente por tres sistemas, mecánico, electrónico e informático, de esta manera íntegra las tecnologías que definen el campo de trabajo de un ingeniero mecatrónico. Cada uno de estos sistemas principales se subdividen en módulos para el manejo independiente de cada articulación. Podemos afirmar que este es un brazo antropomórfico ya que posee tres articulaciones de posicionamiento y por general tres articulaciones de orientación, es decir para el efector final, también llamado pinza o gripper. La palabra antropomórfico es aplicada a cualquier objeto que tenga el aspecto físico parecido al del ser humano principalmente en la parte del hombro, brazo y muñeca, que le sirven básicamente para ubicarse en una posición en el espacio y orientarse para realizar un determinado trabajo. Este robot será de gran utilidad para la enseñanza didáctica de la mecatrónica como herramienta de apoyo a profesores y estudiantes.
Palabras Claves: Robótica, Robot, Mitsubishi, Educación, Mecatrónica, antropomórfico.
The robotic arm Mitsubishi RV-M1, is an articulated robot five axis (5) rotational more a gripper (1) as a work tool, it is an essentially product didactic for learning and research in the subject of robotics, mechanics, programming among other subjects. The robot is basically constituted by three systems, mechanics, electronic, computing in this way it integrates the technologies that define the field of work of a mechatronic engineer. Each of these main systems are subdivided into modules for the independent management of each joint. The Project to develop it has two aspects: theoretical and practical. In the theoretical aspect the contributions are collected We can assure that this is an anthropomorphic arm since it has three positioning joints and in general three orientation joints, that is to say for the final effector, also called clamp or gripper. The word anthropomorphic is applied to any object that has the physical appearance similar to that of the human being mainly in the part of the shoulder, arm and wrist, which basically serve to locate itself in a position in space and to orient itself to perform a certain work Robotics presents a multidisciplinary character framework. In conjunction with this investigation it becomes necessary to emphasize in reinstatement and commissioning of the robotic arm Mitsubishi RV-M1 which is in the university facilities since there is evidence of deterioration in its components, therefore it is out of order. This robot will be very useful for the didactic teaching of mechatronics as a support tool for teachers and students.
Keywords: Robotics, Robot, Mitsubishi, Education, Mechatronic, Anthropomorphic.
Iván Eduardo Castillo GómezIngeniería de Mecatrónica, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Camilo Andrés Peña ForeroIngeniería de Mecatrónica, Estudiante Investigador, Corporación Tecnológica Industrial Colombiana TEINCO, [email protected]
Resumen
Abstract
Propuesta de Reincorporación Brazo Robótico Mitsubishi modelo RV-M1 Para Ambiente Educativo
Reinstatement Proposal Mitsubishi Robotic Arm Model RV-M1 For Education Environment
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
45

Propuesta de Reincorporación Brazo Robótico
El brazo robótico Mitsubishi (modeloRV-M1), se encuentra en el área de recursos didácticos, actualmente en desuso debido a su estado de deterioro. Se hará el análisis y propuesta de mejora en sus dispositivos de control, mecánicos y electrónicos. Para llevar a cabo esta reincorporación también se realizará un análisis en cada uno de sus sistemas para así determinar cuáles componentes se deberán reemplazar.
Este brazo robótico está conformado por dos elementos principales, el manipulador y el controlador, el controlador contiene el sistema microprocesador y las unidades de control de energía, el brazo será accionado por medio de energía eléctrica, Puede ser programado en línea, fuera de línea o en ambas formas, puede moverse de punto a punto con trayectoria coordinada o con trayectoria continua. Este robot puede realizar cualquier tarea, desde la toma y traslado de piezas de un punto a otro, puede ser programado desde la consola de aprendizaje o desde un PC.
El modelo RV-M1 de Mitsubishi, debido a su versatilidad, ha sido implementado en diversos sectores educativos donde se destaca como material didáctico y elemento de prueba en las investigaciones.
En el artículo se proyecta una visión general para la propuesta de reincorporación del brazo robótico Mitsubishi (modelo RV-M1), mediante la repotenciación de sus componentes con el fin de poner en funcionamiento esta herramienta didáctica y fortalecer los contenidos de las asignaturas a fines de la ingeniería mecatrónica de TEINCO, sin entrar en detalle dentro de lo que es su programación, pero mostrando todos los pasos necesarios a realizar para poder lograr su puesta en marcha. A demás, se dará una visión de las ventajas como una posibilidad de integrar diferentes áreas del conocimiento al desarrollo de este.
La importancia de la reincorporación de este brazo robótico radica en que se está logrando incorporar una herramienta tecnológica muy útil para nuestro medio ya que esta herramienta permitirá mejorar la calidad del aprendizaje innovador en ingeniería mecatrónica, por esta razón es imprescindible la necesidad de la repotenciación de los componentes del brazo robótico y su puesta en marcha.
El desarrollo de la propuesta de la reincorporación del brazo tiene un enfoque cuantitativo porque, en base a parámetros necesarios se podrá realizar la puesta en marcha de dicho brazo y se buscara la mejor alternativa de la selección de componentes para el correcto funcionamiento y construir estrategias para un ambiente de aprendizaje con robótica didáctica, esta es una experiencia que contribuye al desarrollo de la creatividad y el pensamiento de los estudiantes.
Actualmente el brazo robótico Mitsubishi de TEINCO presenta averías mecánicas, electrónicas y de comunicación. Entre las limitaciones se encuentra la ausencia de hardware en el brazo robótico, para llevar acabo la reincorporación del brazo robótico Mitsubishi de TEINCO se hace necesario realizar un análisis detallado de sus sistemas como son:
Levantamiento del estado actual del brazo robótico incluyendo registro visual para establecer el punto de partida.
Selección de los componentes a remplazar teniendo en cuenta las ofertas del mercado actual.
Planteamiento de cotización según referencias y mecanismos que deben ser reemplazados.
Con la información anterior Podemos concluir entonces que el brazo robótico Mitsubishi RV-M1 es un robot articulado de 5 ejes rotacionales más un (1) gripper como herramienta de trabajo.
1. Introducción
2. Metodologia
3. Desarrollo de la propuesta3.1. Indagación de la propuesta
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
46

Propuesta de Reincorporación Brazo Robótico
El Sistema del brazo robótico Mitsubishi RV-M1, consta de los siguientes componentes:Robot RV-M1Motored-operated HM-01 (dedos)Drive unit D/U M1 (unidad de control y potencia)Teaching Box T/B M1 (consola de comandos)
La unidad de control se encuentra en un estado avanzado de abandono y deterioro como se puede observar en la figura 4.
3.2. Constitución (partes del robot)
3.3. Estado actual del brazo robótico Mitsubishi RV-M1
Figura 1: Mitsubishi RV-M1 imagen tomada de Manual 2004 Fuente: elaboración propia
Figura 2: sistema de construcción general. Tomada del manual. Fuente: elaboración propia
Figura 3: Brazo robótico imagen tomada en el laboratorio. Fuente: elaboración propia
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
47

Propuesta de Reincorporación Brazo Robótico
Figura 4: Brazo robótico imagen tomada en el laboratorio. Fuente: elaboración propia
Fuente: elaboración propia
A continuación, se enlista el estado del brazo robótico:
3.4. Especificaciones de los motores del brazo
La estructura física se encuentra conservada y en buen estado lo que facilitara la propuesta de repotenciaciónEn la siguiente tabla se pueden apreciar las características de cada uno de los componentes básicos y opcionales del Sistema.
Se realizó un análisis detallado de cada sistema que comprende el brazo robótico, llegando a la conclusión de que está compuesto por seis (6) servomecanismos ubicados en cada una de sus articulaciones, cada uno de ellos contaba con su placa de especificaciones técnicas, con la cual se realizó la siguiente tabla.
a)
b)
c)
Cableado: es preciso remplazar todo el cableado de control y potencia. Se pueden observar fácilmente cables añadidos, cortados y cables inapropiados.
Frenos: de los dos frenos del brazo (hombro y codo) no se conserva ninguno.
Servomotores: de los 6 servomotores que tiene el brazo incluyendo el del gripper, solo dos están operando (gripper y rotación muñeca). Los otros 4 motores se encuentran en mal estado.
Robot
Motor power calbe (5m)
Drive unit
Power cord (2.5)
Motor signal cable (5m)
1/0 card AB (or B8)
RV-M1
MP-M1
D/U M1
POW-M1
MS-M1
1/0 AB(1OB8)
Vertical articulated robot with 5 degrees of reedom
Supplies power from the drive unit to the robot
Robot controlled
Supplies power to the drive unit
Gives control signas from the unit to the robot
8 inputs/8outputs
Description Type Remarks
Est
án
da
r e
qu
ipm
en
t
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
48

Propuesta de Reincorporación Brazo Robótico
Tabla 2: especificaciones de motores. Tomada del manual.
Fuente: elaboración propia
Figura 5: conexionado. Tomado del manual. Fuente: elaboración propia
Figura 6: drive en el laboratorio de la universidad. Fuente: elaboración propia
3.5. Drive unit D/U M1 (unidad de control y potencia)
3.6. Drive unit D/U M1 en el laboratorio
En la siguiente imagen se puede apreciar el sistema de conexionado y las partes externas de la unidad.
1 30 2000CINTURA UNITEC DTME - 2730
4 20 2000CABECEO MUÑECA SNYO DENKI 106-3103-33E0
2 30 2000HOMBRO UNITEC DTME - 2730
5 20 2000ROTA. MUÑECA SNYO DENKI 106-3103-33E0
3 30 2000CODO UNITEC DTME - 2730
6 10 2000GRIPER SNYO DENKI 106-3001-1
NÚMERO WATTS RPMDENOMINACIÓN PLACA MOTOR
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
49

Propuesta de Reincorporación Brazo Robótico
A continuación, se describe el estado de la unidad de potencia y control.
Control: la tarjeta de control cuenta con circuitos integrados obsoletos en el mercado actual, por tal razón no hay forma de reparar, puesto que los predecesores vienen con mayor velocidad de trabajo y menor tamaño, lo que conllevaría a un rediseño en todas las tarjetas de control. Potencia: la potencia es asistida por transistor que hoy en día han sido remplazados por Mosfest IGBT´s que ofrecen un mejor rendimiento en aplicaciones que requieren de operación por PWM. Los componentes de filtrado requieren ser remplazados debido a su estado de deterioro y los ventiladores presentan ruido. Fuente: la Fuente se encuentra en buen estado lo que podría facilitar su aprovechamiento para la repotenciación.
Se hizo el análisis del estado de los componentes del brazo, luego se realizó la selección de los componentes a reemplazar, teniendo en cuenta las ofertas del mercado actual, dando como prioridad a la empresa CDM Control De Movimiento ya que esta empresa cuenta con buen soporte técnico y amplio tiempo de garantía.Valores en pesos colombianos ($) tabla 3.
Se realizó el respectivo levantamiento fotográfico de los componentes eléctricos y mecánicos del robot.
Se realizó un listado con cada uno de los componentes que deben ser reemplazados y repotenciados.
Se solicitaron las respectivas cotizaciones, tomando como prioridad la cotización de la empresa CDM (control de movimiento) la cual se acomodaba a nuestra necesidad y nos brindaba además los mejores precios en cuanto a las otras cotizaciones.
3.7. Selección y cotización de componentes
4. Resultados
Tabla 3: cotización de componentes. Fuente: elaboración propia
$ 6,587,791 + IVA$ 6,587,791 11
Sistema Servomotor YASKAWA SIGMA-7Mechatrolink-III 50 W- Servomotor SGM7 J 50WResolución Encoder 16,777,216 pprTorque Nom/Max= 3000/6000RPM- Servopack SGD7S 50WRespuesta en Frecuencia 3.1 kHzIncluye 7in3out DigitalesCables de conexión de 03m.
Sistema Servomotor YASKAWA SIGMA-7Mechatrolink-III 100 W- Servomotor SGM7 J 100WResolución Encoder 16,777,216 pprTorque Nom/Max= 3000/6000RPM- Servopack SGD7S 100WRespuesta en Frecuencia 3.1 kHzIncluye 7in3out DigitalesCables de conexión de 03m.
Control de movimiento para 4 ejes(No incluye modulo adicional de entradas y salidas de ser necesario, solicitar cotización)
Cable Mechatrolink III (Se debe incluir uno por cada eje)
$ 6,683,738 + IVA$ 6,683,738 12
$ 7,025,809 + IVA$ 7,025,809 13
$ 285,337 + IVA$ 285,337 14
$ TOTAL$ UND CANTITEM EQUIPO
SISTEMA
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
50
Propuesta de Reincorporación Brazo Robótico
El estado actual del brazo traza un punto de partida como referente para así delimitar los objetivos y sus alcances, de esta manera se logra determinar exactamente que componentes reparar y que componentes remplazar.
El desarrollo de esta propuesta es un gran avance dentro del ámbito educativo en la corporación TEINCO, ya que como se venía mencionando a lo largo del mismo, posibilitara que el estudiante de ingeniería mecatrónica se sienta motivado a desarrollar prácticas educativas con esta herramienta, esperando así que el aprendizaje incremente de manera sustancial.
En el desarrollo de la propuesta de reincorporación del brazo robótico se logró identificar sus características eléctricas y parámetros del funcionamiento para el cumplimiento de la repotenciación de sus componentes.La selección de componentes a remplazar y el paralelo comparativo de precios con otros tipos de robots plantea opciones alternas a la reparación y el costo que se debería asumir.
5. Conclusiones
Dragicevic, T., Vasquez, J. C., Guerrero, J. M., & Skrlec, D. (2014). Advanced LVDC Electrical Power Architectures and Microgrids: A step toward a new generation of power distribution networks. IEEE Electrification Magazine, 2(1), 54–65. https://doi.org/10.1109/MELE.2013.2297033
REFERENCIAS
Juan, I., Pazmiño, P., Patricio, P.-W., & Padilla, Q. (n.d.). La mecatrónica:, 149–162.Rowe, D., Sayeef, S., & Platt, G. (2016). Chapter 7 - Intermittency: It’s the Short-Term That Matters. In F. P. Sioshansi (Ed.), Future of Utilities
Utilities of the Future (pp. 129–150). Boston: Academic Press. https://doi.org/http://dx.doi.org/10.1016/B978-0-12-804249-6.00007-5
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
51

Propuesta de Reincorporación Brazo Robótico
APLICACIONES MECATRÓNICAS: PROYECTOS SOBRE ROBÓTICA Y AUTOMATIZACIÓN DE PROCESOS INDUSTRIALES
52