
Una Introduccion a la Geometr´ ´ıa Estocastica y los ... · Universidad Central de Venezuela...
88
Universidad Central de Venezuela Facultad de Ciencias Escuela de Matem ´ aticas Una Introducci ´ on a la Geometr´ ıa Estoc´ astica y los Procesos de Part´ ıculas Aleatorias. Trabajo Especial de Grado presentado ante la ilustre Universidad Central de Venezuela por el Br. Jos´ e Gregorio G´ omez Garc´ ıa, para optar al t´ ıtulo de Licenciado en Matem ´ atica. Tutor: Dr. Gabriel Padilla. Caracas, Venezuela Febrero 2009
Transcript of Una Introduccion a la Geometr´ ´ıa Estocastica y los ... · Universidad Central de Venezuela...

Universidad Central de Venezuela
Facultad de Ciencias
Escuela de Matematicas
Una Introduccion a la Geometrıa Estocastica y los
Procesos de Partıculas Aleatorias.
Trabajo Especial de Grado presentado ante la
ilustre Universidad Central de Venezuela por el
Br. Jose Gregorio Gomez Garcıa, para optar al
tıtulo de Licenciado en Matematica.
Tutor: Dr. Gabriel Padilla.
Caracas, Venezuela
Febrero 2009

I
Nosotros, los abajo firmantes, designados por la Universidad Central de Venezuela
como integrantes del Jurado Examinador del Trabajo Especial de Grado titulado ”Una
introduccion a la Geometrıa Estocastica y los Procesos de Partıculas Aleatorias”,
presentado por el Br. Jose Gregorio Gomez Garcıa. titular de la Cedula de Identidad
V-17.457.212, certificamos que este trabajo cumple con los requisitos exigidos por nuestra
Magna Casa de Estudios para optar al tıtulo de Licenciado en Matematica.
Dr. Gabriel Padilla
Tutor
Dra. Mairene Colina
Jurado
M.Sc. Tomas Guardia
Jurado

Dedicatoria
Hay personajes a quienes les dedico mi esfuerzo, mi desempeno y mi dıa a dıa, el
principal de ellos es el que me ayuda a tener noches tranquilas, despertares bonitos
todos los dıas, paz y amor puro y sincero. Este personaje es justamente Dios, quien me
acompana en todo momento.
A mi madre, Magalys, por todas sus atenciones y sacrificios de su vida solo por el
desarrollo de mi persona y mis hermanos, a mi padre Alfredo y mis hermanos, Alfredo
A. y Dionelys porque de una u otra forma estan a mi lado siempre, a mi tıa Maura, la que
mas quiero de mis tıos y tıas, por ser la que tiene el corazon mas grande de mi familia.
A la mujer que me ha sacado las tres unicas canas que tengo en lo que llevo de vida, la
que me ha tenido algo de paciencia, la que mas me ha esperado, la que se ha ganado mi
confianza y afecto, y la que me ha motivado e inspirado mas a prosperar y desarrollarme,
mi novia Gabriela Da Silva.
Finalmente, mi dedicatoria a dos personas que siempre marcaran mi ninez por las
infinitas alegrıas que pase con ellos y que aun paso, como en este momento, pues
aunque no esten fisicamente, si lo estan en alma, mis abuelos Julio (1932 − 1992) e Irene
(1937 − 2009) (Q.E.P.D).
Que Dios bendiga este y todos los
dias de nuestras vidas.

Agradecimientos
Mis mayores agradecimientos a Dios porque siempre ha estado conmigo, dandome luz
en el camino.
Al Prof. Gabriel Padilla por haberme presentado estas ideas de “Geometrıa Es-
tocastica” y por permitirme trabajar con el en dichas ideas. A la Prof. Mairene Colina
por sus utiles observaciones y correcciones en la parte de Probabilidades en mi Semi-
nario I, mis estudios para este trabajo y su apoyo incondicional en todo momento para
que yo lograra esta meta, a la Prof. Cristina Balderrama por sus consejos y correcciones
en la seccion de Teorıa de la Medida y al Prof. Jose G. Mijares que siempre ha estado a
disposicion para mis trabajos.
A Ruth Leon y Harrison Garcıa porque me apoyaron en el momento mas oportuno
para lograr iniciar mis estudios universitarios de matematicas, a mis estimados Sr. Cesar
Da Silva y Sra. Irma Lozada por brindarme alojamiento en su casa para trabajar, donde
siempre estaba acompanado de un buen consejo maternal por parte de la Sra. Irma,
a mis amigos y panas Luis Manfredonia, Nunzia Colella, Andres Contreras, Brenda
Gomez, Alejandra Ruız, Roberto Morillo, Karelys Medina, Sohar Carrillo, Luis Rivas y
su Dual, Daniel, Luis Jose Gonzalez, Omar Sulbaran, Omar Ortız, Prof. Andres Perez,
Ricardo Franquiz y Jocer Franquiz que siempre estuvieron atentos de mis actividades en
la licenciatura, brindandome ideas y consejos.
A mi companera del CGGA, Adriana Padron, que siempre estuvo allı al lado dandome
latigazos para que trabajara mas rapido y con soluciones oportunas bajo de la manga.
A mi pana, amiga y companera de madrugadas de estudios en red, Mariana Garcıa,
responsable directo que desperto mi curiosidad por trabajar topicos de Geometrıa
Estocastica y la persona que siempre me apoyaba y continua apoyandome en cualquier
proyecto que me proponga. Personas que de una u otra forma han influenciado en mi dıa
a dıa de trabajo, como mis otros companeros del CGGA, al Prof. Tomas Guardia, Jonathan
Otero y Julian Rojas.
A todos Gracias.

Una Introduccion a la Geometrıa Estocastica y los
Procesos de Partıculas Aleatorias
Br. Jose Gregorio Gomez Garcıa
Febrero 2009

INDICE
Introduccion 0
1. Preliminares 1
1.1. Fibrados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Construccion de Fibrados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3. Ejemplos: Fibrado Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.1. Fibrado de una superficie simple. . . . . . . . . . . . . . . . . . . . . 5
1.3.2. Fibrado de una superficie . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.3. Representacion geometrica de un espacio fibrado . . . . . . . . . . . 8
2. Medidas Aleatorias y Procesos Puntuales 10
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2. Procesos Estocasticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3. Caminatas Aleatorias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4. Cadenas de Markov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5. Teorema de Caratheodory y la medida de Conteo . . . . . . . . . . . . . . . 23
2.5.1. Teorema de Caratheodory . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.5.2. La medida de contar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.6. Medidas Aleatorias y Procesos Puntuales . . . . . . . . . . . . . . . . . . . . 30
2.7. Conjunto Cerrado Aleatorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3. Medida de Hausdorff 42
3.1. Construccion de Caratheodory en un espacio metrico . . . . . . . . . . . . . 42
3.2. Construccion de la medida de Hausdorff . . . . . . . . . . . . . . . . . . . . 44
I

INDICE II
3.3. Propiedades de la medida de Hausdorff . . . . . . . . . . . . . . . . . . . . . 46
3.4. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4. Tangencia Conica y Rectificabilidad 50
4.1. Tangencia Conica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1.2. Diferenciabilidad Relativa . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2. k-Tangencia Conica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.1. k-Diferenciabilidad Aproximada . . . . . . . . . . . . . . . . . . . . . 60
4.3. Teorema de la Tangencia Conica . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3.1. Funcion Lipschitz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3.2. Conjuntos Rectificables . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5. Fibrados Aleatorios 63
5.1. Procesos de Partıculas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2. Procesos Fibrados y Sistemas de superficies . . . . . . . . . . . . . . . . . . . 67
5.3. Modelos Geometricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.3.1. Procesos de lıneas (por el orıgen) finitas en el plano . . . . . . . . . . 72
5.3.2. Proceso de lıneas finitas en el plano . . . . . . . . . . . . . . . . . . . 73
5.3.3. Fibrado de un Sistema Fibrado en R2 . . . . . . . . . . . . . . . . . . 74
5.3.4. Fibrado de Procesos Puntuales . . . . . . . . . . . . . . . . . . . . . . 76
Bibliografıa 79

Introduccion
En los anos 1700, el naturalista, botanico, matematico, biologo y escritor frances,
Georges Louis Leclerc, mejor conocido como el conde de Buffon (1707 - 1788) plateo y
resolvio el problema que hoy lleva su nombre, “El Problema de Buffon”, que consistıa en
calcular la probabilidad de que al lanzar una aguja en un tablero de ajedrez este cruce
una de las lıneas horizontales del tablero. La solucion a este problema esta estrictamente
relacionado con la geometrıa de los objetos en estudio. Esto da origen a nuevas ramas
como Geometrıa Integral y Probabilidad Geometrica, desarrollados por Gustav Herglotz
(1881-1953), Wilhelm Eugen (1885-1962) y Luis Santalo, que junto a la Teorıa de
Conjuntos Aleatorios estudiados por David Kendall (1918-2007) y Georges Matheron
(1930-2000), se desarrolla esta rama de las matematicas, llamada Geometrıa Estocastica.
Este trabajo tiene como objetivo describir la teorıa de fibrados topologicos a proce-
sos fibrados(procesos de curvas) y procesos puntuales, y hacer notar la diferencia en-
tre “Fibra Topologica” y “Fibra” como partıcula compacta, como se muestra en la obser-
vacion 5.3.2. Para ello se realiza un breve estudio de las cadenas de Markov y caminatas
aleatorias para ser utilzados como ejemplos a lo largo de todo el trabajo, y la construccion
de los procesos puntuales en general para luego generalizarlas a espacios donde los ob-
jetos aletorios no necesariamente son “partıculas” puntuales. Para llegar a esta general-
izacion se necesita una funcion que pueda medir estos objetos, esta funcion es la Medida
de Hausdorff, que se caracteriza por medir objetos bastante irregulares como trayectorias
fractales, etc.
La Teorıa de Fibrados que particularmente es usada, es la de los Fibrados Tangentes
ya que los objetos aletorios son “casi” diferenciables en casi todos sus puntos, lo cual
es demostrado a traves de los conceptos de Tangencia Conica, Funciones Lipschitz,
Rectificabilidad y Diferenciabilidad Aproximada.
Tambien se introduce la definicion de “Procesos de Partıculas”, que consiste en
conjuntos compactos no vacıos en un espacio Polaco y que se comportan como procesos
puntuales en dicho espacio. Finalmente se muestra mediante algunas corridas en Matlab
ejemplos de procesos de partıculas, en particular “fibras”, que no tienen ninguna relacion
con la definicion de Fibra como miembro de la cuadrupla de un fibrado topologico, el
cual se presta mucho a confusion por los lectores de textos de geometrıa estocastica, las
cuales son aclaradas en las definiciones 1.1.1, 5.2.2 y la observacion 5.3.2.
CAPITULO 1
Preliminares
En este capıtulo se da un breve embozo sobre de la teorıa de fibrados topologicos,
fundamental para el objetivo de este trabajo. Se da la definicion, construccion, condicion
necesaria y suficiente para la existencia de fibrados, y se trata un ejemplo particular de
fibrados, el fibrado tangente, con la intencion de explicar con mas claridad la construccion
de los fibrados, ademas porque este tipo de fibrado es el usado para caracterizar los
procesos fibrados y procesos de superficies.
1.1. Fibrados
Un fibrado es una generalizacion de un espacio producto. El estudio de dos espaciosXy Y con una funcion f : X −→ Y es equivalente al estudio del espacio producto X×Y,
sus proyecciones en X y Y, y la grafica de f . Vease figura 1.1.
Los problemas conectados con fibrados son diversos. Por ello, el de interes en este
trabajo es estudiar la existencia de los mismos.
Definicion 1.1.1. Un fibrado es una cuadrupla ξ = (E, π, B, F) donde
1. E, B, F son espacios topologicos, llamados Techo, Base o Espacio Cociente y Fibra
respectivamente.
2. π : E −→ B es una funcion continua y sobreyectiva.
3. Para cada punto e ∈ E existe un entorno abierto U de b donde b = π(e), tal que
π−1(U) es homeomorfo a U × F mediante el homeomorfısmo α que satisface:
1

1.1 Fibrados 2
Figura 1.1: Equivalencia del estudio de una funcion y su respectiva grafica
U × F
U
π−1(U)
PR1
α
π
?
-
@@
@@R
π(α(u, z)) = u, para todo u ∈ U. Al conjunto U × F se le llama carta fibrada.
Dado un fibrado ξ = (E, π, B, F), sea Γ = Uii∈I un cubrimiento abierto de B. A los
miembros de Γ se les llama entornos coordenados de B, por definicion 1.1.1., para cada
i ∈ I hay un homeomorfısmo
αi : Ui × F −→ π−1(Ui),
denominado la funcion coordenada de Ui, tal que
π(αi(u, x)) = u, para cada u ∈ Ui, y cada x ∈ F.
Para cada u ∈ Ui, i ∈ I, se considera el homeomorfısmo αi,u : F −→ π−1(u) definida
por
αi,u(x) = αi(u, x),
entonces, para cada par i, j ∈ I, y cada u ∈ Ui ∩ Uj se tiene el siguiente homeomorfısmo
α−1j,u αi,u : F −→ F
y se define la funcion
guji = α−1
j,u αi,u, (1.1)
la cual es contınua.

1.1 Fibrados 3
π−1(Ui ∩ Uj)
αi,u αj,u
Ui ∩ Uj × F ⊂ Ui × F Ui ∩ Uj × F ⊂ Uj × FUi ∩ Uj
αi αj
PR1PR1
π−1(u)PR2
PR2
α−1j,u αi,u
F F-
6 6
-
?
¾
?
@@
@@
@@
@@
@@R
¡¡
¡¡
¡¡
¡¡
¡¡ª
¡¡
¡¡
¡µ
@@
@@
@I
Estas funciones guij con i, j ∈ I cumplen con las siguientes propiedades:
(i) guii = 1F, siempre que u ∈ Ui, donde 1F es la funcion identidad en F.
(ii) guij =
(gu
ji
)−1, siempre que u ∈ Ui ∩ Uj.
(iii) guijg
ujk = gu
ik, siempre que u ∈ Ui ∩ Uj ∩ Uk.
En efecto,
(i) Sea u ∈ Ui, entonces
guii = α−1
i,u αi,u = 1F.
(ii) Para u ∈ Ui ∩ Uj,
guij = α−1
i,u αj,u = (α−1j,u αi,u)−1 =
(gu
ji
)−1.
(iii) Suponiendo que u ∈ Ui ∩ Uj ∩ Uk, se tiene que
guijg
ujk = (α−1
i,u αj,u)(α−1j,u αk,u) = α−1
i,u (αj,uα−1j,u )αk,u = α−1
i,u 1Fαk,u = α−1i,u αk,u = gu
ik.
Para cada i, j ∈ I, una funcion gij como en (1.1), es llamada el cambio de coordenada
(de Ui × F a Uj × F) del fibrado, y al conjunto
G = gij : i, j ∈ I, (1.2)
se le llama conjunto de cambios de coordenadas del fibrado.

1.2 Construccion de Fibrados 4
1.2. Construccion de Fibrados
Ahora la idea es saber ¿Cual es la condicion necesaria y suficiente para tener un
fibrado?. Para dar una idea de la condicion es necesaria la siguiente construccion.
Sea T ⊂ B × I × F el conjunto de los triples (u, i, x) tal que u ∈ Ui. Entonces
T =⊔
i
Ui × i × F, (1.1)
y defınase la siguiente relacion ” ∼ ”,
(u, i, x) ∼ (v, j, y) ⇐⇒ u = v, gvjix = y, con gji ∈ G.
La relacion ” ∼ ” es de equivalencia. En efecto,
(i) Reflexividad: es directo de la propiedad 1.1.1.(i).
(ii) Simetrıa: si (u, i, x) ∼ (v, j, y), entonces u = v y gvjix = y. De la propiedad 1.1.1.(ii)
gvijy = gv
ij
[gv
jix]
=[
gvijg
vji
]x = 1Fx = x,
ası (v, j, y) ∼ (u, i, x).
(iii) Transitividad: si (u, i, x) ∼ (v, j, y) y (v, j, y) ∼ (w, k, z), entonces u = v, gvjix = y y
v = w, gwkjy = z. De la propiedad 1.1.1.(iii),
z = gwkjy = gw
kj
[gv
jix]
=[
gwkjg
vji
]x = gv
kix.
Por tanto, (u, i, x) ∼ (w, k, z).
Ahora se puede definir el espacio
E = T/ ∼, (1.2)
asignando a cada (u, i, x) ∈ T su clase de equivalencia [u, i, x] ∈ E.
Con esta relacion de equivalencia y este espacio cociente definido se puede enunciar el
siguiente Teorema, cuya demostracion se realiza usando las ideas de la construccion del
espacio E ((1.2) de esta seccion ). Para ver la demostracion en detalle consultar Steenrod,
N [10].

1.3 Ejemplos: Fibrado Tangente 5
Teorema 1.2.1. Sean B y F espacios topologicos, y G = gij : i, j ∈ I un conjunto de cambios de
coordenadas cuyos elementos actuan sobre F. Si Uii∈I es un cubrimiento abierto de B; giji,j∈I
es un sistema de cambios de coordenadas en el espacio B, entonces existe un fibrado ξ con espacio
base B, fibra F, cambios de coordenadas giji,j∈I , espacio fibrado
E =
⊔i Ui × i × F
∼y proyeccion π : E −→ B, definida como
π([u, i, x]) = u.
Observacion 1.2.1. Cualquier otro fibrado ξ ′ que tenga los mismos conjuntos G, F, B y
Uii∈I ; giji,j∈I (sistema de cambios de coordenadas) es equivalente al fibrado ξ.
1.3. Ejemplos: Fibrado Tangente
Hay una gran gama de ejemplos de fibrados y muchas maneras de construirlos. Para
estas notas solo es de interes un caso particular de los fibrados, que es el fibrado tangente
como se muestra a continuacion.
1.3.1. Fibrado de una superficie simple.
Sea D ⊂ R2 un abierto y X : D ⊆ R2 −→ R3 una superficie simple tal que
X(u, v) = (x(u, v), y(u, v), z(u, v)) y S = Im(X). Entonces para cada p = X(u, v) ∈ S
existe un unico plano tangente TpS dado por la ecuacion
TpS :
⟨∂X
∂u× ∂X
∂v
∣∣∣∣(u,v)
,x− p⟩= 0.
El espacio fibrado “tangente” a S es
T(S) =⊔p∈S
p ×R2 = S ×R2,
donde S y R2 son el espacio Base y Fibra respectivamente del fibrado, cuya proyeccion
esta dada por la funcion
π : T(S) −→ S,
π(p,v) = p.
1.3 Ejemplos: Fibrado Tangente 6
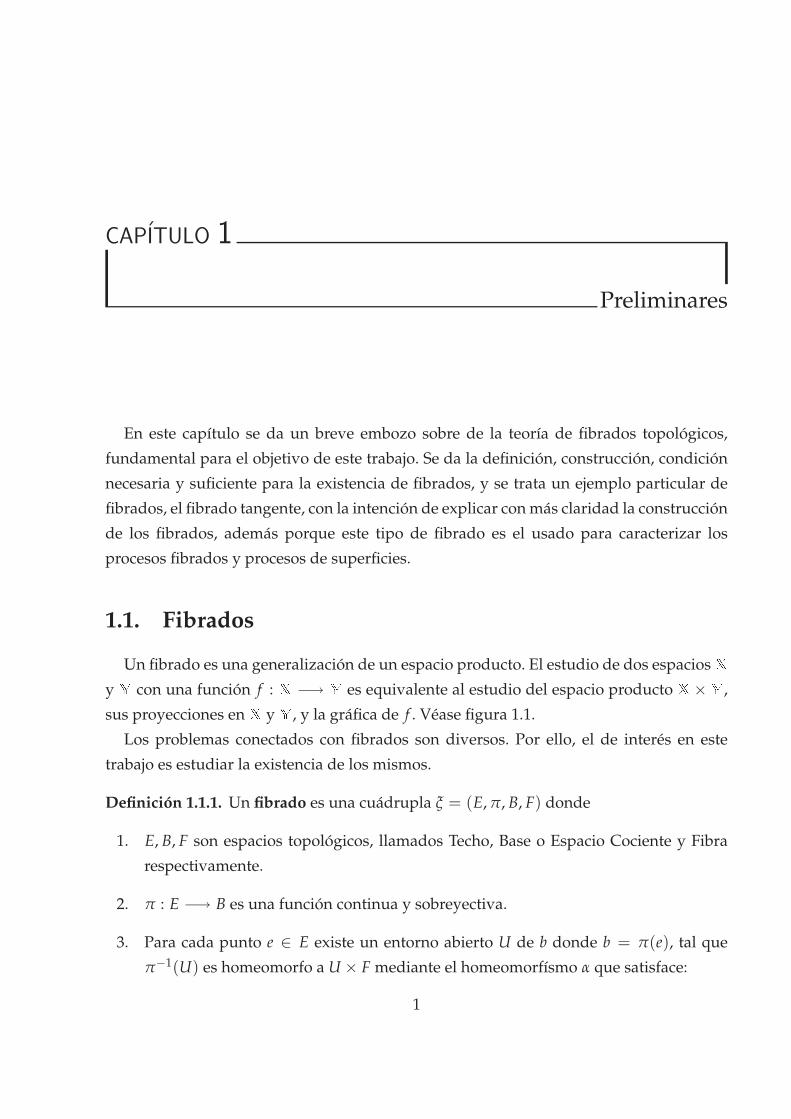
Ademas, dado (p,v) ∈ T(S), basta elegir S como el abierto que contiene a p y el
homeomorfısmo
α : S ×R2 −→ π−1(S),
α(s,w) = (s, [w]BT) ,
donde BT =
∂X∂u , ∂X
∂v
es una base del subespacio vectorial de dimension 2 de vectores
tangentes en s, con s ∈ S.
Observacion 1.3.1. Notese que [w]BT= [ JX|(u,v)]x, donde [ JX|(u,v)] es la matriz jacobiana
de X en (u, v) ∈ D y X(u, v) = s.
Figura 1.2: Fibrado tangente de una superficie simple.
1.3.2. Fibrado de una superficie
Supongase que M es una superficie (no simple) en R3. Entonces para cada punto p en
M existe una superficie simple (carta local) α : D ⊆ R2 −→ R3 tal que p ∈ α(D) = U.
Como se vio en la subseccion anterior, existe un fibrado tangente de U, T(U) = U ×R2,
homeomorfo a π−1(U).
Sean (α, U) y (β, V) dos cartas en M tales que U ∩ V. Por ser M una superficie,
ϕ = β−1 α : α−1(U ∩ V) ⊂ U −→ β−1(U ∩ V) ⊂ V

1.3 Ejemplos: Fibrado Tangente 7
es un cambio de coordenadas (de U a V). Luego intersectando dos cartas fibradas,
U ∩ V ×R2, se tienen las siguientes funciones coordenadas:
α, β : U ∩ V ×R2 −→ π−1(U ∩ V),
definidas como
α(p,x) =(p,
[Jα|α−1(p)
]x)y
β(p,x) =(p,
[Jβ|β−1(p)
]x).
De donde
ϕ = β−1 α : U ∩ V ×R2 ⊆ R4 −→ U ∩ V ×R2 ⊆ R4
definida como
ϕ(p,x) =
(p,[
Jβ|β−1(p)
]−1 [Jα|α−1(p)
]x)
es un cambio de coordenadas (o de cartas) fibradas. Vease el siguiente diagrama.
π−1(U ∩ V)α βU ∩ V ×R2 U ∩ V ×R2
U ∩ V
α−1(U ∩ V) β−1(U ∩ V)
PR1PR1
ϕ
α β
- ¾
?
@@
@@
@@R
¡¡
¡¡
¡¡ª
¡¡
¡¡µ
@@
@@I
-
Entonces por el teorema 1.2.1 ( Teorema de Existencia de Fibrados), existe un espacio
fibrado
TM =
⊔α Uα ×R2
∼ =⊔p∈M
TpM
con base M y fibra R2.

1.3 Ejemplos: Fibrado Tangente 8
Figura 1.3: Cambio de cartas de un fibrado tangente de una superficie.
1.3.3. Representacion geometrica de un espacio fibrado
Geometricamente, el fibrado tangente es la union disjunta de los espacios tangentes.
Ahora se quiere mostrar un modelo geometrico de como puede ser un fibrado tangente.
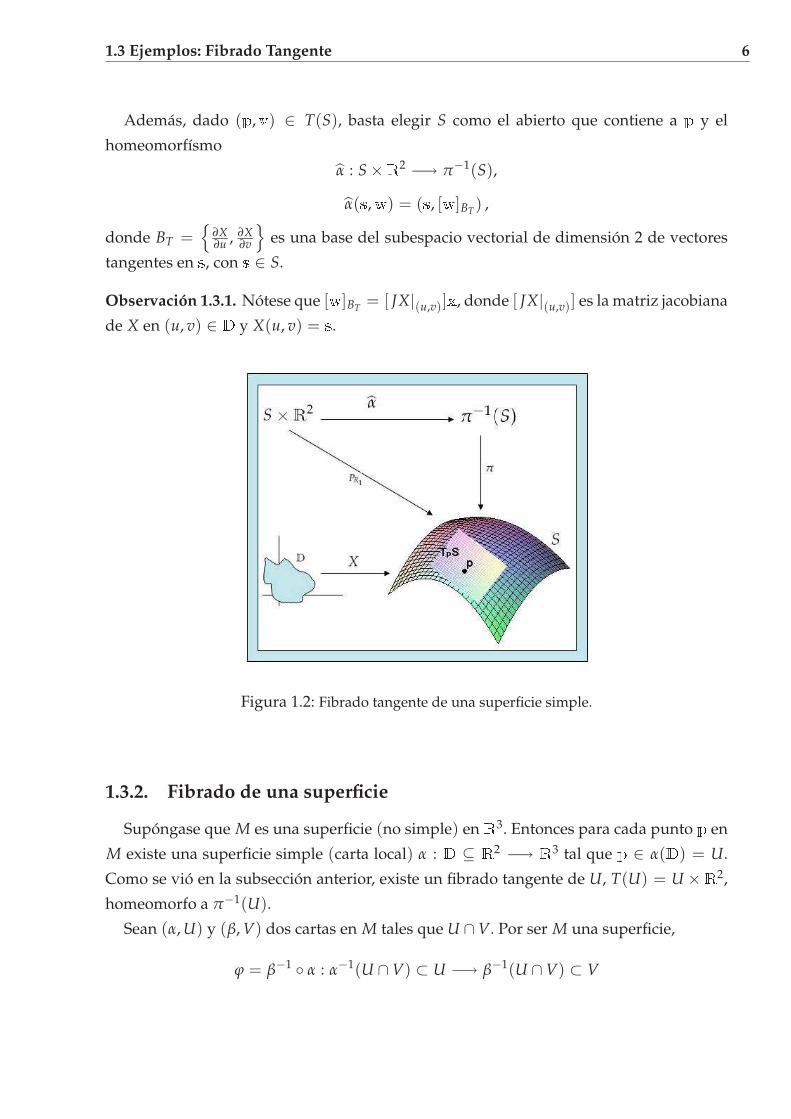
Una superficie (simple o no) su espacio fibrado es de dimension 4, es decir, el grafico
esta enR5 y esto limita una ilustracion. Ahora bien, tomando una curva plana, su espacio
fibrado asociado es de dimension 2, por tanto el grafico es un subconjunto de R3, el cual
si se puede ilustrar. Sin embargo, hay que tener cuidado en el modelo a seleccionar pues
si por ejemplo se toma un modelo como el dado en la figura 1.4 , entonces no se obtiene
una buena representacion ya que el fibrado tangente no se puede representar como una
union disjunta de la familia de rectas tangentes asociadas al modelo.
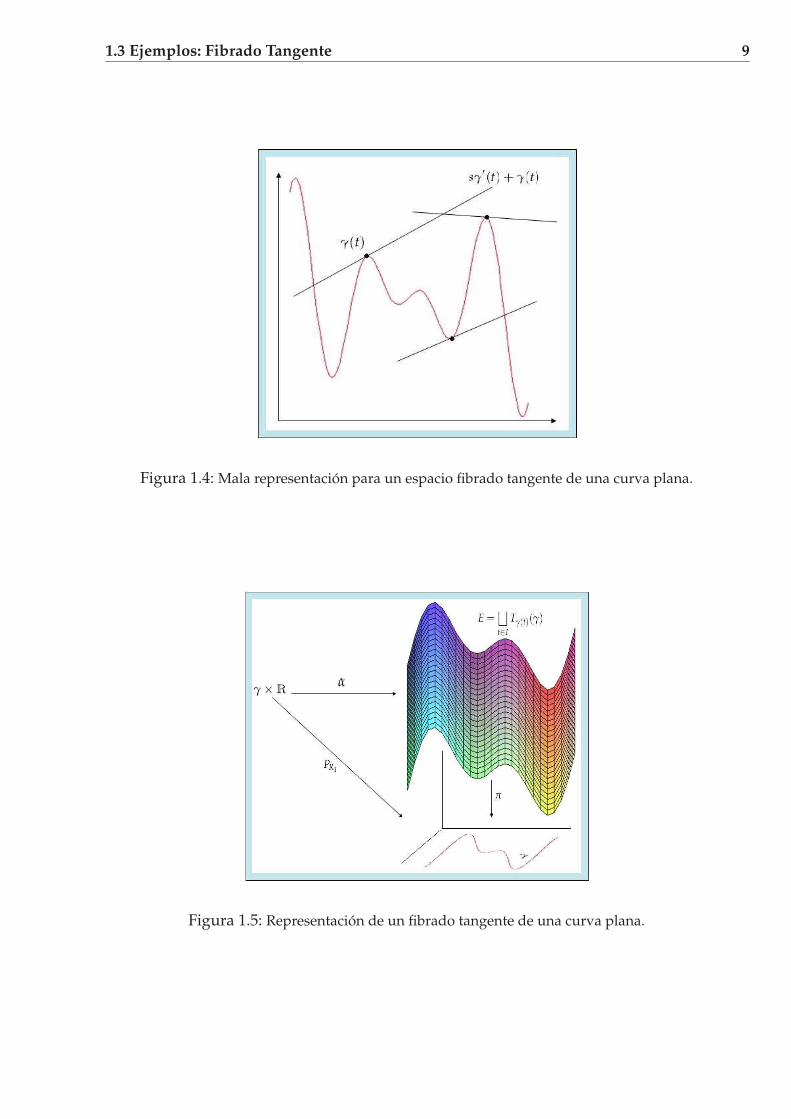
Para representar el fibrado tangente como una union disjunta, y acorde con el
razonamiento de la dimension del espacio fibrado, un buen modelo a ilustrar esta en
la figura 1.5.
Notese que fue obligatorio subir de dimension para lograr la union disjunta.
1.3 Ejemplos: Fibrado Tangente 9
Figura 1.4: Mala representacion para un espacio fibrado tangente de una curva plana.
Figura 1.5: Representacion de un fibrado tangente de una curva plana.

CAPITULO 2
Medidas Aleatorias y Procesos Puntuales
2.1. Introduccion
El proposito de este capıtulo es el estudio de los procesos puntuales y sus medidas
aleatorias asociadas. Se inicia con una version “mas probabilıstica” la definicion de
los procesos aleatorios puntuales y se desglosa de manera ilustrada para notar la
interpretacion geometrica de estos, seguidamente se toman dos procesos particulares
(Caminatas Aleatorias y Cadenas de Markov) como ejemplos.
Los procesos puntuales unidimensionales pueden ser formulados de diversas maneras,
puesto que el espacio en donde ocurren las trayectorias es la recta real y por esta razon
se cuenta con el uno de los principales beneficios de este espacio, el orden natural de los
numeros reales, para formular los procesos puntuales unidimensionales. La formulacion
mas ventajosa, como explica Baddeley [1], es usando el conteo de puntos del proceso
por intervalo, esto es, el conteo de puntos del proceso en cada intervalo compacto deR. Este conteo de puntos por intervalo compacto es independiente y esto resulta ideal
para manipular las distribuciones de los procesos, ademas que este modo de formular
los procesos da de manera directa un patron para generalizar los procesos puntuales a
elevadas dimensiones, desde un conteo de puntos por intervalo compacto de R a un
conteo de puntos por region compacta de X Polaco. Dicho conteo de puntos por region
compacta junto con el Teorema de Caratheodory se llega a la contruccion formal de la
definicion de un proceso puntual.
Finalmente se introduce el concepto de conjunto cerrado aleatorio, que intuitivamente
es una union de conjuntos cerrados que contienen puntos del proceso. Es decir, si se
10

2.2 Procesos Estocasticos 11
considera (X, T ) un espacio topologico y A la familia de todos los abiertos de X que
no contienen puntos del proceso, esto es
A = B ∈ T : B no contiene puntos del proceso
,
Figura 2.1: Conjunto Cerrado Aleatorio Ξ.
entonces el conjunto cerrado aleatorio puede ser tomado como
Ξ =⋃
B∈A
Bc,
el cual sera generalizado como una funcion medible con fines de definir, en el ultimo
capıtulo, procesos de objetos geometricos mas complejos que un punto.
2.2. Procesos Estocasticos
Intuitivamente un proceso estocastico consiste en la descripcion historica de algunas
variables aleatorias Xt la cual evolucionan en el tiempo.
Definicion 2.2.1. Dado un espacio de probabilidad (Ω,A,P), un proceso estocastico o
un proceso aleatorio es una familia de variables aleatorias ( funciones medibles),
(Xt : t ∈ T) = (Xt(ω) : t ∈ T, ω ∈ Ω, T ⊂ T)
donde T es una familia de ındices.

2.2 Procesos Estocasticos 12
Observacion 2.2.1. Notense las siguientes:
(i) Un proceso estocastico es discreto si T = N o T = Z, y continuo si T = R. Para
fines de este trabajo, solo se consideran procesos estocasticos discretos.
(ii) Se asume que el proceso toma sus valores en un conjunto E , llamado espacio de
estados.
(iii) Se asume que el espacio de estados E es finito o numerable.
(iv) El espacio de estados E no necesariamente tiene alguna relacion con el espacio
muestral Ω.
(v) Un proceso estocastico es una funcion de dos variables tales que:
1. Para cada instante de tiempo t0 fijo, la funcion Xt0(ω), ω ∈ Ω es una variable
aleatoria.
2. Para cada ω0 fijo Xt(ω0), t ∈ T es una funcion del tiempo. Esta funcion es
llamada trayectoria del proceso. Es decir, para cada ω ∈ Ω se tiene una
trayectoria, Xt(ω)t∈T, del proceso. Vease figura 2.2.
0 0.5 1 1.5 2 2.5 3 3.5 4−30
−20
−10
0
10
20
30
40Figura 1. Diferentes trayectorias(w=1,w=2 y w=3) de un proceso puntual 1−dimensional.
X1X2X3X4X5X6X7X8X(n−1)Xn
Figura 2.2: Tres trayectorias distintas de un proceso puntual unidimensional.

2.3 Caminatas Aleatorias 13
Para observar el orden de las llegadas en el tiempo se usa una poligonal de orden,
que consiste en unir con segmentos de recta Xn(ω0) con Xn+1(ω0), n ∈ T ⊂ Z. Vease
poligonal para la trayectoria asociada al evento ω = 3 de la figura 2.2.
0 1 2 3 4 5 6 7 8 9 10−15
−10
−5
0
5
10
15
20
25
30Figura 2. Poligonal para el evento dado w=3 de la figura 1.
indice
valo
res
que
tom
a el
eve
nto
del p
roce
so
Figura 2.3: Poligonal para el evento ω = 3 del proceso descrito en la figura 2.2.
Definicion 2.2.2. Sea (Xt, t ∈ T) un proceso estocastico. Dado ω ∈ Ω fijo, sea Xt(ω) una
trayectoria asociada a ω, en un espacio X. Se define el grafo asociado a la trayectoria
Xt(ω), al conjunto
Gr(ω) = x ∈ X : Xt(ω) = x, t ∈ T, T ⊂ T, ω ∈ Ω.
Notese que varias trayectorias del proceso pueden tener el mismo grafo asociado.
2.3. Caminatas Aleatorias
Supongase que se tiene una partıcula en movimiento de tal manera que el paso
siguiente de dicha partıcula no tiene ninguna relacion con ninguno de los pasos dados
anteriormente. Una situacion como esta es lo que es llamado caminata aleatoria, que
formalmente se enuncia en la siguiente definicion.
Definicion 2.3.1. Considerese Xnn∈N una sucesion de variables aleatorias independi-
entes, identicamente distribuidas y no concentradas. La caminata aleatoria inducida por

2.3 Caminatas Aleatorias 14
Xnn∈N es la sucesion de variables aleatorias Cnn≥0 tales que
Cn =n
∑k=0
Xk,
donde el punto inicial es tomado en el origen, X0 = 0.
Un vector aleatorio de la sucesion dada Xnn∈N, es (Xj+1, · · · , Xk) y sus sumas
parciales 0, Cj+1 − Cj, · · · , Ck − Cj se denominara la seccion jk-esima de la caminata
aleatoria. Los subındices se tratan como parametro de tiempo, a las que se llamaran
epocas.
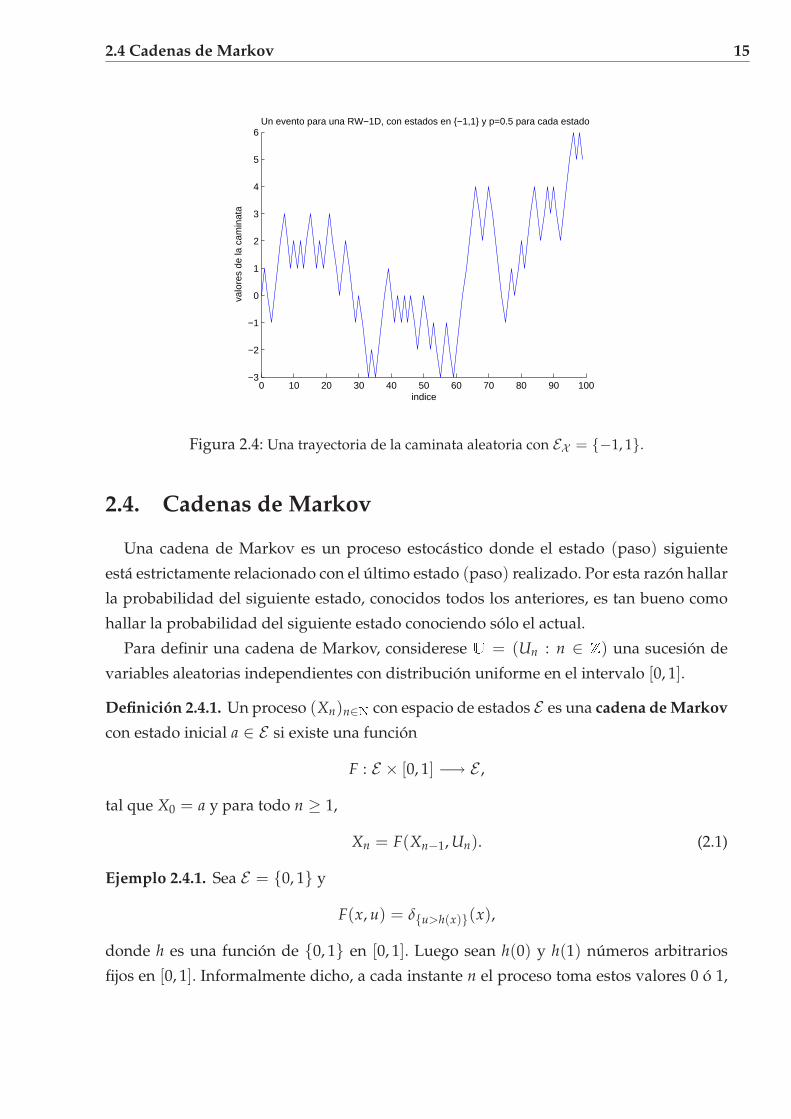
Cn alcanza un valor de registro en los puntos donde Cn excede a todos los valores
anteriores C0, · · · , Cn−1. Vease figura 2.4.
Se puede repetir varias veces el mismo valor de registro antes de que alcance un
nuevo valor de registro. A los puntos de dichos maximos relativos se les llama puntos
escalonados debiles. La importancia de los puntos escalonados proviene del hecho de
que las secciones entre ellos son replicas probabilisticas mutuas, por lo que se pueden
obtener importantes conclusiones relativas de la caminata aleatoria con el estudio del
primer punto escalonado.
En la siguiente figura (figura 1.4), se muestra la poligonal de orden o trayectoria de
un evento para una caminata aleatoria unidimensional (n, Cn) donde X = (Xn)n∈N tiene
espacio de estados EX = −1, 1 y probabilidad p = 0.5, para cada estado.
Ejemplo 2.3.1. Sea A = αn : n ∈ N una sucesion de variables aleatorias independientes
distribuidas uniformemente en [0, 2π). Sea el siguiente proceso
X = Xαn : n ∈ T ⊂ N, αn ∈ A, ‖Xαn‖ = 1, ∀n ∈ N.
El espacio de estados para X es EX = S1 ∩ (x, y) : y = mx, m ∈ Q. Ahora la caminata
aleatoria inducida por X es Cnn∈N, donde
Cn =n
∑k=0
Xαk.
Notese que el espacio de estado para este nuevo proceso es EC = R2. Vease figura 2.5,
donde se muestra una trayectoria de 20 mil pasos.
2.4 Cadenas de Markov 15
0 10 20 30 40 50 60 70 80 90 100−3
−2
−1
0
1
2
3
4
5
6Un evento para una RW−1D, con estados en −1,1 y p=0.5 para cada estado
indice
valo
res
de la
cam
inat
a
Figura 2.4: Una trayectoria de la caminata aleatoria con EX = −1, 1.
2.4. Cadenas de Markov
Una cadena de Markov es un proceso estocastico donde el estado (paso) siguiente
esta estrictamente relacionado con el ultimo estado (paso) realizado. Por esta razon hallar
la probabilidad del siguiente estado, conocidos todos los anteriores, es tan bueno como
hallar la probabilidad del siguiente estado conociendo solo el actual.
Para definir una cadena de Markov, considerese U = (Un : n ∈ Z) una sucesion de
variables aleatorias independientes con distribucion uniforme en el intervalo [0, 1].
Definicion 2.4.1. Un proceso (Xn)n∈N con espacio de estados E es una cadena de Markov
con estado inicial a ∈ E si existe una funcion
F : E × [0, 1] −→ E ,
tal que X0 = a y para todo n ≥ 1,
Xn = F(Xn−1, Un). (2.1)
Ejemplo 2.4.1. Sea E = 0, 1 y
F(x, u) = δu>h(x)(x),
donde h es una funcion de 0, 1 en [0, 1]. Luego sean h(0) y h(1) numeros arbitrarios
fijos en [0, 1]. Informalmente dicho, a cada instante n el proceso toma estos valores 0 o 1,

2.4 Cadenas de Markov 16
Figura 2.5: Una trayectoria de la caminata aleatoria descrita en el ejemplo 2.3.1.
donde Un es mas pequeno o mas grande que h(Xn−1). Vease figura 2.6, donde se toma
h(0) = 0.75; h(1) = 0.25 y X0 = 0.
Ejemplo 2.4.2. Sea E = 0, 1,
F(x, u) =
1 − x si u > g(x)
x en otro caso
donde g : 0, 1 −→ [0, 1] es una funcion. Sean g(0) y g(1) numeros arbitrarios fijos
en [0, 1]. Informalmente dicho, en cada instante n el proceso cambia de estado si el
correspondiente valor Un es mas grande que g(Xn−1). Vease figura 2.7, donde se toma
g(0) = 0.75; g(1) = 0.25 y X0 = 0.
Definicion 2.4.2. Sea
Q(x, y) = P(Xn = y|Xn−1 = x), (2.2)
para n ∈ N y x, y ∈ E .
Una funcion Q : E × E −→ [0, 1] es llamada una matriz de transicion si para cada
x ∈ E ,
∑y∈E
Q(x, y) = 1.
En otras palabras, si la suma de las entradas de cada fila de la matriz es igual a 1.

2.4 Cadenas de Markov 17
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Figura 2. Un evento para el ejemplo 1 con h(0)=0.75, h(1)=0.25 y estado inicial en el orígen.
indice
esta
do
Figura 2.6: Una trayectoria del proceso de Markov descrito en el ejemplo 2.4.1.
Proposicion 2.4.1. Cada matriz de transicion Q en E y cada a ∈ E define una cadena de Markov
(Xn)n∈N con probabilidades de transicion dadas por Q y estado inicial a. Esto es, existe una
funcion F tal que la cadena de Markov (2.1) satisface (2.2).
Demostracion:
Se necesita construir una funcion F : E × [0, 1] −→ E como la de la definicion 2.4.1 con
la propiedad P(F(x, u) = y) = Q(x, y).
A continuacion se propone una construccion general de dicha funcion F.
Para cada x ∈ E se construye una particion de [0, 1], sea (I(x, y) : y ∈ E) una familia
de borelianos (sin perdida de generalidad se considera I(x, y) como una union finita o
numerable de intervalos) que satisface
I(x, y) ∩ I(x, z) = ∅,
siempre que x 6= z, y⋃
y∈EI(x, y) = [0, 1].
Se pide que m(I(x, y)) = Q(x, y), donde m(I) es la medida de Lebesgue del conjunto
I.

2.4 Cadenas de Markov 18
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Figura 3. Un evento para el ejemplo 2 con g(0)=0.75, g(1)=0.25 y estado inicial en el orígen.
indice
esta
do
Figura 2.7: Una trayectoria del proceso de Markov descrito en el ejemplo 2.4.2.
Hay muchas maneras de definir las particiones. La mas simple es ordenando los
estados de E y concatenar intervalos de longitud Q(x, y). Con la particion en mano, se
define F como sigue,
F(x, u) = ∑y∈E
y1I(x,y)(u). (2.3)
En otras palabras, F(x, u) = y, si y solo si u ∈ I(x, y). Luego se construye la cadena
(Xn)n∈N usando la definicion 2.4.1 con la funcion (2.3). Para ver que esta cadena tiene
probabilidades de transicion Q, se procede con el siguiente calculo:P(Xn = y|Xn−1 = x) = P(F(x, Un) = y)
= P(Un ∈ I(x, y)) (2.4)
= m(I(x, y)) (2.5)
= Q(x, y).
¤
La proposicion anterior dice que para algun proceso (Xn)n∈N satisfaciendo (2.3)
es posible construir otro proceso (Yn)n∈N con la misma ley (distribucion) usando el
algoritmo (2.1). La proposicion 2.4.1 motiva el siguiente teorema.

2.4 Cadenas de Markov 19
Teorema 2.4.1. (Cadena de Markov) Un proceso estocastico (Xn)n∈N con espacio de estados Ees una cadena de Markov con matriz de transicion Q, si para todo n ≥ 1 y cada subconjunto finito
xi : 0 ≤ i ≤ n de E tal queP(X0 = x0, · · · , Xn−1 = xn−1, Xn = xn) > 0,
cumple que:P(Xn = xn|X0 = x0, · · · , Xn−1 = xn−1) = P(Xn = xn|Xn−1 = xn−1) = Q(xn−1, xn).
La expresion anterior es conocida como la propiedad de Markov.
Demostracion:
Notese que por definicion de probabilidad condicional e hipotesis,P(Xn = xn|Xn−1 = xn−1) =P(Xn = xn, Xn−1 = xn−1)P(Xn−1 = xn−1)
≥ P(Xn = xn, Xn−1 = xn−1, · · · , X1 = x1, X0 = x0)P(Xn−1 = xn−1)> 0,
de la igualdad (2.4) se deduce queP(Xn = xn|Xn−1 = xn−1) > 0 ⇐⇒ Un ∈ I(xn−1, xn).
Por lo tanto,P(Xn = xn|X0 = x0, · · · , Xn−1 = xn−1) = P(Un ∈
n−1⊔
k=0
I(xk, xn)
)
=n−1
∑k=0
P(Un ∈ I(xk, xn))
= P(Un ∈ I(xn−1, xn))
= P(Xn = xn|Xn−1 = xn−1) = Q(xn−1, xn).
¤
El teorema anterior dice que, en una cadena de Markov, la prevision del paso siguiente
sabiendo todo el pasado es tan bueno como cuando se conoce solo el valor actual del
proceso. El enunciado del teorema es lo que en la mayorıa de los libros toman como una
definicion de cadena de Markov.

2.4 Cadenas de Markov 20
Como consecuencia del Teorema 2.4.1, la probabilidad conjunta de una cadena de
Markov es dada por:P(X0 = x0, · · · , Xn−1 = xn−1, Xn = xn) = P(Xn = xn|Xn−1 = xn−1, · · · , X0 = x0)
= P(Xn = xn|Xn−1 = xn−1, · · · , X0 = x0)P(Xn−1 = xn−1|Xn−2 = xn−2, · · ·· · · , X0 = x0) · · ·P(X2 = x2|X1 = x1, X0 = x0)P(X1 = x1|X0 = x0)P(X0 = x0)
= P(Xn = xn|Xn−1 = xn−1)P(Xn−1 = xn−1|Xn−2 = xn−2) · · ·P(X1 = x1|X0 = x0)P(X0 = x0)
= Q(xn−1, xn)Q(xn−2, xn−1) · · · Q(x1, x2)Q(x0, x1)P(X0 = x0).
El siguiente ejemplo es muy usado en el resto de este trabajo como base para generar
otros ejemplos mas complejos.
Ejemplo 2.4.3. Caminata aleatoria en el hipercubo
Sea N un entero positivo y E = 0, 1N. Si N = 2 se puede pensar a E como el conjunto
de vertices de un cuadrado. Cuando N = 3 se puede pensar a E como el conjunto de
vertices de un cubo y cuando N ≥ 4, puede pensarse como el conjunto de los vertices de
un hipercubo.
Sea x = (x1, · · · , xN) un elemento de E . Los vecinos de x son los elementos de E que
tengan todas las coordenadas iguales a x excepto una. Si j ∈ 1, 2, · · · , N, es llamado xj
al elemento de E que tenga todas las coordenadas iguales a x pero la j-esima distinta,
xji =
xi si i 6= j
1 − xj si i = j
De manera que los vecinos de x son los elementos x1,x2, · · · ,xN.
Esto induce una nocion natural de distancia entre elementos de E ,
d(x,y) =N
∑i=1
|xi − yi|
para x,y ∈ E . La distancia entre x y y es el numero de coordenadas para que x y yson diferentes. Esta es conocida como la distancia de Hamming. Dos elementos de E son
vecinos cuando la distancia de Hamming entre ellos es uno.
Ahora se quiere construir una cadena de Markov en E con el siguiente compor-
tamiento. En cada tiempo del proceso se decide cambiar de estado (o no) segun el re-
sultado de una perfecta moneda (es decir con la misma probabilidad para cambiar de
estado o no). Si este decide cambiar, entonces salta a uno de los vecinos con la misma
probabilidad. Este proceso es construido de la manera siguiente:

2.4 Cadenas de Markov 21
Para a ∈ 0, 1 sea
xj,ai =
xi si i 6= j
a si i = j
una configuracion con valor a en la j-esima coordenada e igual a x en las otras
coordenadas. Considerese
I(x,y) =
[j−1N ,
j−1N + 1
2N
)si y = xj,0, j = 1, · · · , N
[j−1N + 1
2N ,j
N
)si y = xj,1, j = 1, · · · , N
∅ si d(x,y) > 1
Entonces usando la igualdad (2.5), la probabilidad del j-esimo ensayo en el paso n es:P(Un ∈
[j − 1
N,
j
N
))=
1
N,
y la probabilidad de asignar el valor 0 para el sitio elegido esP(Un ∈
[j − 1
N,
j − 1
N+
1
2N
)∣∣∣∣ Un ∈[
j − 1
N,
j
N
))=P(
Un ∈[
j−1N ,
j−1N + 1
2N
)∩
[j−1N ,
jN
))P(Un ∈
[j−1N ,
jN
))
=P(
Un ∈[
j−1N ,
j−1N + 1
2N
))P(Un ∈
[j−1N ,
jN
))
=1
2.
analogamente, la probabilidad para asignar el valor 1 para el sitio elegido es 1/2. Con
estas estas expresiones en mano se puede calcular Q(x,y). Es notorio que esto es cero siy no es vecino de x. Asumiendo que xj = 1 se calcula,
Q(x,xj) = P(U1 ∈
[j − 1
N,
j − 1
N+
1
2N
))=
1
2N.
Analogamente, asumiendo xj = 0,
Q(x,xj) = P(U1 ∈
[j − 1
N+
1
2N,
j
N
))=
1
2N.
Vease la figura 2.8. Una caminata aleatoria en el cubo cuyo estado inicial es el origen.

2.4 Cadenas de Markov 22
00.2
0.40.6
0.81
0
0.5
10
0.2
0.4
0.6
0.8
1
X
Figura 4. Caminata Aleatoria en el Cubo.(100 pasos)
Y
Z
Figura 2.8: Una trayectoria aleatoria en el cubo (100 pasos aleatorios).

2.5 Teorema de Caratheodory y la medida de Conteo 23
2.5. Teorema de Caratheodory y la medida de Conteo
Un proceso puntual es un proceso estocastico (Xt : t ∈ T) cuya familia de variables
aleatorias definidas sobre un espacio Ω son tales que, para cada ω0 fijo se tiene que
dim(Xt(ω0)) = 0 donde t ∈ T. Pero para fines practicos esta manera de ver los procesos
puntuales es bastante vaga.
La manera mas util y conveniente para formular los procesos puntuales es usando el
conteo de puntos por region, que no es mas que el numero de puntos en un subconjunto
cerrado y acotado B en el espacio X. El contador de puntos u operador de conteo es
natural para el estudio de propiedades aditivas de un proceso puntual.
Ademas, los valores del operador contador, da suficiente informacion para reconstruir
totalmente las posiciones de todos los puntos en el proceso. En efecto, este indica en cuales
puntos del espacio X hay puntos del proceso.
Ası, teniendo este operador y usando la herramienta del Teorema de Caratheodory se
puede comenzar a construir una definicion de procesos puntuales mas manejable para
niveles practicos.
2.5.1. Teorema de Caratheodory
El Teorema de Caratheodory es base para construcciones de medidas en las proximas
secciones.
Definicion 2.5.1.
Sea X un conjunto. Decimos que una funcion µ∗ : P(X) −→ [0, ∞] es una medida
exterior si:
1. µ∗(∅) = 0,
2. µ∗ es monotona, esto es, si A ⊂ B entonces µ∗(A) ≤ µ∗(B),
3. µ∗ es σ-subaditiva, es decir, si A =⋃∞
n=1 An, luego
µ∗(A) ≤∞
∑n=1
µ∗(An).
Ademas, se dice que un conjunto E ⊂ X es µ∗-medible, si para todo A ∈ P(X)
µ∗(A) = µ∗(A ∩ E) + µ∗(A ∩ Ec).

2.5 Teorema de Caratheodory y la medida de Conteo 24
Observacion 2.5.1. Sea E ⊂ X, entonces ∀A ∈ P(X)
A = A ∩ (E ∪ Ec) = (A ∩ E) ∪ (A ∩ Ec),
por la σ-subaditividad de µ∗ se tiene que:
µ∗(A) ≤ µ∗(A ∩ E) + µ∗(A ∩ Ec).
Por lo tanto, se puede decir que E ⊂ X es µ∗-medible si y solo si ∀A ⊂ Xµ∗(A) ≥ µ∗(A ∩ E) + µ∗(A ∩ Ec).
Teorema 2.5.1. (Caratheodory)
Sea
Mµ∗ = E ⊆ X : µ∗(A) = µ∗(A ∩ E) + µ∗(A ∩ Ec), ∀A ⊂ X,
la clase de todos los subconjuntos medibles deX. La clase Mµ∗ es una σ-algebra y la restriccion µ
de µ∗ a esta clase es una medida.
Demostracion:
A continuacion se demostrara que Mµ∗ satisface las propiedades de una σ-algebra.
(i) Dado A ⊂ X, y puesto que µ∗(∅) = 0, entonces
µ∗(A) = µ∗(A ∩X) + µ∗(∅) = µ∗(A ∩X) + µ∗(A ∩ ∅) = µ∗(A ∩X) + µ∗(A ∩Xc),
es decir,X ∈ Mµ∗ .
(ii) Sea E ∈ Mµ∗ . Luego para cada A ∈ P(X).
µ∗(A) = µ∗(A ∩ E) + µ∗(A ∩ Ec) = µ∗(A ∩ Ec) + µ∗(A ∩ (Ec)c),
por lo tanto Ec ∈ Mµ∗ .
Notese que ∅ ∈ Mµ∗ por (i) y (ii).
(iii) Sean E1, E2 ∈ Mµ∗ . Entonces teniendo en cuenta la observacion 2.5.1, la medibilidad
de conjuntos y la subaditividad de µ∗, se tiene que,
µ∗(A) = µ∗(A ∩ E1) + µ∗(A ∩ Ec1)
= µ∗(A ∩ E1) + µ∗(A ∩ Ec1 ∩ E2) + µ∗(A ∩ Ec
1 ∩ Ec2)
≥ µ∗((A ∩ E1) ∪ (A ∩ Ec1 ∩ E2)) + µ∗(A ∩ (E1 ∪ E2)
c)
= µ∗(A ∩ (E1 ∪ (Ec1 ∩ E2))) + µ∗(A ∩ (E1 ∪ E2)
c)
= µ∗(A ∩ (E1 ∪ E2)) + µ∗(A ∩ (E1 ∪ E2)c),

2.5 Teorema de Caratheodory y la medida de Conteo 25
para cualquier A ⊂ X. Por lo tanto, E1 ∪ E2 ∈ Mµ∗ .
Notese que por las dos propiedades anteriores (Mµ∗ cerrado para uniones finitas y
complementos) se tiene que si E1, E2 ∈ Mµ∗ entonces E1 ∩ E2 ∈ Mµ∗ .
(iv) Dada cualquier sucesion de conjuntos (An)n≥1 en Mµ∗ se puede construir a partir
de esta sucesion una sucesion de conjuntos disjuntos (En)n≥1 tal que
⋃
n≥1
An =⊔
n≥1
En.
Por lo tanto para probar que Mµ∗ es cerrado para uniones numerables basta ver
que, dado E =⊔
n≥1 En, con En ∈ Mµ∗ entonces E ∈ Mµ∗ .
En efecto, sea E =⊔
n≥1 En, En ∈ Mµ∗ y A ∈ X. Definiendo Fn =⊔n
k=1 Ek y teniendo
en cuenta la observacion 2.5.1 y la monotonıa de µ∗,
µ∗(A) = µ∗(A ∩ Fn) + µ∗(A ∩ Fcn)
≥ µ∗(A ∩ Fn) + µ∗(A ∩ Ec).
Ademas,
µ∗(A ∩ Fn) = µ∗(A ∩ Fn ∩ En) + µ∗(A ∩ Fn ∩ Ecn)
= µ∗(A ∩ En) + µ∗(A ∩ Fn−1).
Por induccion en n ≥ 1
µ∗(A ∩ Fn) =n
∑k=1
µ∗(A ∩ Ek), (2.1)
luego tomando lımite y σ-subaditividad de µ∗
lımn→∞
µ∗(A ∩ Fn) =∞
∑k=1
µ∗(A ∩ Ek)
≥ µ∗(
n⊔
k=1
(A ∩ Ek)
)(2.2)
= µ∗(A ∩ E).
Ası se concluye que E ∈ Mµ∗ .
Observacion 2.5.2. Por monotonıa de µ∗ se tiene que µ∗(A ∩ E) ≥ µ∗(A ∩ Fn). Usando la
igualdad (2.1) y tomando lımite cuando n −→ ∞ se tiene que
µ∗(A ∩ E) ≥∞
∑k=1
µ∗(A ∩ Ek).

2.5 Teorema de Caratheodory y la medida de Conteo 26
Luego por la desigualdad (2.2) se concluye que,
µ∗(A ∩ E) =∞
∑n=1
µ∗(A ∩ Ek). (2.3)
Ahora se demostrara que µ es una medida sobre Mµ∗ .
(i) Sea E ∈ Mµ∗ . Entonces
µ∗(∅) = µ∗(∅ ∩ E) + µ∗(∅ ∩ Ec) = 2µ∗(∅) ⇐⇒ µ∗(∅) = 0,
por lo tanto,
µ(∅) = µ∗(∅) = 0.
(ii) Sea E =⊔∞
n=1 En con En ∈ Mµ∗ ∀n. Como E es medible, por la ecuacion (2.3),
tomando E = A,
µ(E) = µ∗(E) =∞
∑n=1
µ∗(En) =∞
∑n=1
µ(En).
Ası, µ∗ es una medida en Mµ∗ . ¤
Definicion 2.5.2. Sea C una clase de subconjuntos de un conjunto X tal que esta contiene
al vacıo. Se dice que una funcion λ : C −→ [0, ∞] es una premedida si λ(∅) = 0.
Teorema 2.5.2. Sea λ una premedida definida en una clase C de subconjuntos de X que contiene
al vacıo. Para cada E ⊂ X, se define
µ∗(E) = inf
∞
∑i=1
λ(Ci) : Ci ∈ UE
,
donde UE = Ci ⊂ C : E ⊂ ⋃∞i=1 Ci es la clase de todos los cubrimientos de E por conjunto de
C. Si no hay ni un cubrimiento de E por conjuntos de C, es decir UE = ∅, entonces µ∗(E) = ∞.
Luego µ∗ es una medida exterior, que extiende a λ.
Demostracion:
(i) Ya que λ es una premedida y ∅ ∈ C, µ∗(∅) = λ(∅) = 0.
(ii) Si A ⊂ B ⊂ X, todo cubrimiento de B por conjuntos de C es cubrimiento de A, esto
es, UB ⊂ UA, por lo tanto
µ∗(A) = inf
∞
∑i=1
λ(Ci) : Ci ∈ UA
≤ inf
∞
∑i=1
λ(Ci) : Ci ∈ UB
= µ∗(B).

2.5 Teorema de Caratheodory y la medida de Conteo 27
(iii) Si E =⋃∞
n=1 En con (En)∞n=1 ⊂ X, se quiere ver que
µ∗(E) ≤∞
∑n=1
µ∗(En).
En efecto, si µ∗(En) = ∞ para algun n, se tiene por monotonıa que
µ∗(
∞⋃
n=1
En
)≥ µ∗(En) = ∞.
Supongase entonces que ∀n ∈ N µ∗(En) < ∞. Sea ǫ > 0, entonces, por definicion
de µ∗, para cada n ∈ N existe un cubrimiento numerable Cn,i∞i=1 de En, de la clase
C tal que∞
∑i=1
λ(Cn,i) < µ∗(En) +ǫ
2n.
Ası
E =∞⋃
n=1
En ⊆∞⋃
n=1
∞⋃
i=1
Cn,i,
por lo tanto, dado que µ∗ es monotona,
µ∗(E) = µ∗(
∞⋃
n=1
En
)≤ µ∗
(∞⋃
n=1
∞⋃
i=1
Cn,i
),
y de la definicion de µ∗,
µ∗(
∞⋃
n=1
∞⋃
i=1
Cn,i
)≤
∞
∑n=1
∞
∑i=1
λ(Cn,i) <
∞
∑n=1
(µ∗(En) +
ǫ
2n
)=
∞
∑n=1
µ∗(En) + ǫ.
El resultado es ahora consecuencia del hecho que ǫ > 0 es arbitrario.
Ası queda demostrado que µ∗ es una medida exterior, que extiende a λ.
¤
2.5.2. La medida de contar
Definicion 2.5.3. Sea K = K(X) el conjunto de todos los subconjuntos compactos de un
conjunto X. Se define el operador contador o contador de puntos a la funcion
N : K −→ N∪ 0,
definida como
N(B) =∞
∑n=1
δxn(B),
donde δx(A) es el delta de Dirac de x en A.

2.5 Teorema de Caratheodory y la medida de Conteo 28
El operador contador satisface las siguientes propiedades:
(i) N(∅) = 0.
(ii) Si A, B son conjuntos disjuntos de K, entonces
N(A ⊔ B) = N(A) + N(B). (2.4)
Ademas se supone que el operador de conteo N es localmente finito, esto es,
N(B) < ∞,
para todo B ∈ K.
Claramente se nota que N es una premedida, luego por el teorema 2.5.2, la funcion
N∗ : P(X) −→ N∪ 0,
definida como
N∗(E) = inf
∞
∑i=1
N(Ci) : Ci ∈ UE
= inf
∞
∑i=1
∞
∑n=1
δxn(Ci) : Ci ∈ UE
,
donde UE = Ci ⊂ K : E ⊂ ⋃∞i=1 Ci, es una medida exterior, que extiende a N. Por el
Teorema de Caratheodory se tiene que
MN∗ = E ⊂ X : N∗(A) = N∗(A ∩ E) + N∗(A ∩ Ec), ∀A ⊂ X
es una σ-algebra y N∗|MN∗ es una medida.
Proposicion 2.5.1. Sea (X, ρ) un espacio metrico segundo numerable. La σ-algebra generada por
el sistema de los compactos K de X coincide con la σ-algebra de Borel en X, es decir
B(X) = σ(K).
La demostracion de esta proposicion es un clasico ejercicio de Teorıa de la Medida.
Puede ser consultado en el capıtulo 1, de [3].
¤
Teorema 2.5.3. La σ-algebra de Borel B(X) esta contenida en MN∗ .
Demostracion:
Como MN∗ es una σ-algebra, por la proposicion 2.5.1, la clase K(X) de los conjuntos
compactos de X genera a B(X), es decir, basta ver que K ⊂ MN∗ .

2.5 Teorema de Caratheodory y la medida de Conteo 29
Sean K ∈ K y A ⊆ X. Vease que
N∗(A) ≥ N∗(A ∩ K) + N∗(A ∩ Kc).
En efecto, si N∗(A) = ∞, la desigualdad es evidente. Por lo tanto, considerese N∗(A)
finito. Dado ǫ > 0, se puede hallar una sucesion de conjuntos compactos (Kn)∞n=1 ∈ K tal
que A ⊂ ⋃∞n=1 Kn y
N∗(A) + ǫ ≥∞
∑n=1
N(Kn).
Usando la aditividad finita de N en K, expresion (2.4),
∞
∑n=1
N(Kn) =∞
∑n=1
N [(Kn ∩ K) ∪ (Kn ∩ Kc)]
=∞
∑n=1
[N(Kn ∩ K) + N(Kn ∩ Kc)]
=∞
∑n=1
N(Kn ∩ K) +∞
∑n=1
N(Kn ∩ Kc).
Puesto que N coincide con N∗ en los compactos, A ∩ K ⊂ ⋃∞n=1(Kn ∩ K), A ∩ Kc ⊂
⋃∞n=1(Kn ∩ Kc) y N∗ es monotona,
∞
∑n=1
N(Kn ∩ K) +∞
∑n=1
N(Kn ∩ Kc) =∞
∑n=1
N∗(Kn ∩ K) +∞
∑n=1
N∗(Kn ∩ Kc)
≥ N∗(
∞⋃
n=1
(Kn ∩ K)
)+ N∗
(∞⋃
n=1
(Kn ∩ Kc)
)
> N∗(A ∩ K) + N∗(A ∩ Kc).
Como ǫ > 0 es arbitrario, se tiene el resultado.
¤
De ahora en adelante sera denotado por ν a la restriccion N∗|B(X).
Proposicion 2.5.2. Si µ1 y µ2 son dos medidas cuales quiera en (X,B) que coinciden en los
subconjuntos compactos de X y son finitas en dichos conjuntos compactos entonces, µ1 y µ2
coinciden en B.
Esquema de la demostracion:
Sean µ∗1 y µ∗
2 las medidas que extienden a µ1 y µ2 respectivamente, ya que µ1 y µ2
estan definidas en K. Dado que µ1 y µ2 coinciden en K, K genera la σ-algebra de Borel
y la unicidad de la medida exterior, que extiende a µ1 y µ2, se tiene que µ∗1(B) = µ∗
2(B)
∀B ∈ B(X). Ası se llega al resultado.
¤

2.6 Medidas Aleatorias y Procesos Puntuales 30
Teorema 2.5.4. ν es la unica medida en B(X) que coincide con el operador N en los compactos.
Demostracion:
Sea µ otra medida en B(X) que coincide con N en los compactos. Entonces
µ(K) = ν(K) = N(K) < ∞,
para todo K ∈ K(X). Por la porposicion 2.5.2, se tiene que µ(B) = ν(B), ∀B ∈ B(X).
¤
2.6. Medidas Aleatorias y Procesos Puntuales
A partir de este momento, a menos que se indique lo contrario, se considera (X, ρ)
un espacio Polaco (espacio metrico, completo y separable, esto es, un espacio metrico
completo que tiene un subconjunto denso numerable), el cual es locamlmente compacto,
es decir, para cada x ∈ X existe un entorno de tal x con clausura compacta. Como en
las secciones anteriores, se denotan O = O(X), F = F (X) y K = K(X) a los sistemas
de todos los subconjuntos abiertos, cerrados y compactos de X respectivamente; y de la
manera usual se denota la σ-algebra de Borel en X como B = B(X).
Definicion 2.6.1. Una medida µ en (X,B(X)) se dice que es localmente finita si esta es
finita en conjuntos acotados de Borel.
Sea M ≡ M(X) el conjunto de todas las medidas localmente finitas en (X,B).
Entonces es denotado por
N ≡ N (X) = ν ∈ M : ν(B) ∈ N∪ 0, ∞, ∀B ∈ B ,
al conjunto de todas las medidas localmente finita que toman valores enteros.
En el siguiente teorema se nota que el conjunto N da suficiente informacion de la
estructura del grafo en todas las realizaciones del proceso puntual. Para demostrar dicho
teorema se necesita la siguiente proposicion.
Proposicion 2.6.1. (Sumas no numerables)
Sea E un conjunto de numeros reales positivos. Se define
∑x∈E
x = supF∈PF
SF = supF∈PF
∑x∈F
x,
donde PF (E) = F ⊂ E : #(F) < ∞.
Entonces,

2.6 Medidas Aleatorias y Procesos Puntuales 31
(i) Si ∑x∈E x < ∞, E es numerable.
(ii) Si E es numerable y xn∞n=1 una enumeracion de E,
∑x∈E
x =∞
∑n=1
xn.
Teorema 2.6.1. Sea (X,A) un espacio medible y µ : A → [0, ∞) una medida σ − f inita que
toma solo valores enteros, y supongase que A contiene a todos los subconjuntos unitarios de X.
Entonces existe un conjunto numerable Z = xnn∈N tal que
µ =∞
∑n=1
λnδXn ,
es una combinacion lineal entera de funciones de δ − Dirac.
Demostracion:
Considerese el conjunto Z = x ∈ X : µ(x) > 0. Como µ es σ-finita, se tiene que
existe una sucesion de conjuntos (An)∞n=1 ∈ A tal queX =
∞⋃
n=1
An,
con µ(An) < ∞, ∀n ∈ N. Entonces por monotonıa de µ, µ(An ∩ Z) < ∞, ∀n ∈ N. Usando
la proposicion 2.6.1, para cada n ∈ N, An ∩ Z es numerable.
Puesto que
Z = Z ∩X = Z ∩∞⋃
n=1
An =∞⋃
n=1
(Z ∩ An),
se tiene que Z es numerable.
Sea U = x : x ∈ X. Por hipotesis U ⊂ A, esto implica que para todo x en U se
tiene que x es un conjunto medible. Por lo tanto se puede escribirX = Z ∪ Zc.
Sea A ∈ A. Notese que µ(A ∩ Zc) = 0. En efecto, si A ∩ Zc = ∅, no hay nada que
probar. Supongase que A ∩ Zc 6= ∅ y µ(A ∩ Zc) > 0. Puesto que A es arbitrario, tomando
A = x0 se tiene que
0 < µ(A ∩ Zc) = µ(x0 ∩ Zc) ≤ µ(x0),
es decir x0 ∈ Zc y esto es una contradiccion. Por lo tanto µ(A ∩ Zc) = 0.

2.6 Medidas Aleatorias y Procesos Puntuales 32
Ahora sea xn∞n=1 una enumeracion de Z, entonces
µ(A) = µ(A ∩X) = µ(A ∩ (Z ∪ Zc))
= µ(A ∩ Z) + µ(A ∩ Zc) = µ(A ∩ Z)
= µ
(A ∩
∞⊔
n=1
xn)
= µ
(∞⊔
n=1
(A ∩ xn))
=∞
∑n=1
µ(A ∩ xn) =∞
∑n=1
µ(xn)δxn(A)
=∞
∑n=1
λnδxn(A),
donde λn = µ(xn) ∈ N.
¤
Ahora se procede a generar una σ-algebra en N .
Un evento basico de un proceso puntual en X es el evento que tiene exactamente k
puntos en la region B,
EB,k = ν(B) = k = ν ∈ N : ν(B) = k
para cada B ∈ K y k = 1, 2, · · · .
Sea EN = EB,k : B ∈ K y k ∈ N∪ 0 el conjunto de todos los eventos basicos de un
proceso puntual en X.
Proposicion 2.6.2. EN es sub-base de alguna topologıa en N .
Demostracion:
Se quiere ver que,
S =
n⋂
i=1
EiB,k : B ∈ K ∧ k ∈ N∪ 0
es base de alguna topologıa en N . En efecto,
(i) Es claro que
N =⋃
E∈S
E.
(ii) Sean E1, E2 ∈ S, entonces existen
E1iB,k
n
i=1y
E
2jB,k
m
j=1tales que E1 =
⋂ni=1 E1i
B,k y
E2 =⋂m
j=1 E2jB,k. Por lo tanto,
E1 ∩ E2 =n⋂
i=1
E1iB,k ∩
m⋂
j=1
E2jB,k ∈ S.

2.6 Medidas Aleatorias y Procesos Puntuales 33
¤
De la proposicion anterior se llega al siguiente corolario.
Corolario 2.6.1. El conjunto de todos los eventos basicos EN genera una topologıa TN en N .
Ahora con la topologıa TN generada por los eventos basicos EN se tiene la σ-algebra
de Borel B(N ) de N , esto es, la σ-algebra generada por los eventos basicos del proceso
puntual, es decir,
B(N ) = σ(EN ),
los borelianos de N son generados por los conjuntos EB,k = ν : ν(B) = k para cada
B ∈ K y k ∈ N∪ 0.
Con la σ-algebra de Borel en N en manos, se puede proceder a definir formalmente un
proceso puntual de la siguiente manera.
Definicion 2.6.2. Sea (Ω,A,P) un espacio de probabilidad y MM una σ-algebra en M.
Una medida aleatoria en X es una funcion
Ψ : (Ω,A,P) −→ (M, MM),
tal que esta es medible.
Un proceso puntual en X es una medida aleatoria
Φ : (Ω,A,P) −→ (N ,B(N )),
donde el espacio medible (N ,B(N )) es llamado espacio de resultados del proceso
puntual en X.
La definicion anterior dice que cada resultado elemental ω ∈ Ω determina un resultado
νω ∈ N y del teorema 2.6.1 se sabe que es un resultado xn(ω)∞n=1 del proceso puntual.
Ademas, notese que la medibilidad es el requerimiento tal que para cualquier evento
E ∈ B(N ), el evento
Φ−1(E) = ω ∈ Ω : Φ(ω) ∈ E = ω ∈ Ω : νω ∈ E, νω ∈ N ∈ A.
Definicion 2.6.3. La distribucion de un proceso puntual Φ es la medida de probabilidad,PΦ, sobre el espacio de resultados (N ,B(N )), definida porPΦ(E) = PΦ−1(E),
con E ∈ B(N ).

2.6 Medidas Aleatorias y Procesos Puntuales 34
Definicion 2.6.4. La medida de intensidad o simplemente intensidad de un proceso
puntual Φ, es la medida
Λ(ω) = EΦ(ω) =∫
Φ(ω)dPΦ,
con ω ∈ Ω.
Observacion 2.6.1. La medida de intensidad Λ no necesita ser localmente finita en
general.
Definicion 2.6.5. Sea Φ un proceso puntual. Se dice que Φ es un proceso puntual simple
si P(Φ ∈ N ∗) = 1, donde
N ∗ = ν ∈ N : ν(x) ≤ 1, ∀x ∈ X .
Ejemplo 2.6.1. Proceso Binomial
Para tomar un ejemplo muy simple, sea un numero fino n de puntos al azar
localizados dentro de una region acotada W ⊂ R2. Sean x1, · · · , xn puntos aleatorios
i.i.d(independientes e identicamente distribuidos) que estan uniformemente distribuidos
en W. Por lo tanto, la densidad de probabilidad de cada xi, es:
f (x) =
1/m2(W) si x ∈W
0 en otro caso
donde m2(W) denota la medida de Lebesgue en R2. La realizacion de este proceso es
mostrado en la siguiente figura:
Figura 2.9: Puntos al azar distribuidos uniformemente enW.

2.7 Conjunto Cerrado Aleatorio 35
Ya que cada punto aleatorio xi esta uniformemente distribuido enW, se tiene que para
cualquier conjunto acotado B ⊂ R2,P(xi ∈ B) =∫
Bf (x)dx =
∫
B∩W f (x)dx +∫
B−W f (x)dx
=∫
B∩W 1
m2(W)dx =
m2(B ∩W)
m2(W)= p,
donde p es la probabilidad de exito de que xi este en el compacto B.
Puesto que la variable,
N(B) =n
∑i=1
δxi(B),
considerando todos los xi , se deduce facilmente que N(B) tiene una distribucion
binomial con parametro n (numero de pruebas ) y probabilidad p = m2(B∩W)m2(W)
, por lo
tando este proceso es un proceso Binomial B(n, p).
Notese que este ejemplo se puede extender para cualquier espacioX, metrico segundo
numerable con medida de Lebesgue en X, mX.
Observacion 2.6.2. El operador de conteo N(B) para diferentes subconjuntos Bk las
variables aleatorias N(Bk) no son independientes, esto es pues si por ejemplo B1 y B2 son
dos conjuntos compactos disjuntos sobre una region W con un numero finito de puntos,
N(W) = n, entonces N(B1) y N(B2) deben ser dependientes, ya que
N(B1) ≤ n − N(B2).
2.7. Conjunto Cerrado Aleatorio
Un proceso puntual simple puede ser formulado de manera completamente diferente
ya que puede considerarse como un conjunto aleatorio Ξ. Si se sabe el valor de N(B) para
todo subconjunto compacto B deX, entonces se puede determinar la ubicacion exacta de
cada punto x en el proceso puntual (simple).
Definicion 2.7.1. ([2], Seccion 2.1). Un conjunto S ⊂ X es localmente finito si su
interseccion con cualquier conjunto acotado es finita.
Proposicion 2.7.1. Sea (X, T ) un espacio topologico. Un conjunto S ⊂ X es localmente finito,
si y solo si, para todo x ∈ X existe un entorno Ux ∈ T de x tal que S ∩ Ux es finito.

2.7 Conjunto Cerrado Aleatorio 36
Demostracion:
(=⇒) Sea x ∈ X y A un subconjunto acotado deX tal que x ∈ A. Sea Γ = Uα : α ∈ Λun cubrimiento abierto de A, entonces existe α0 ∈ Λ tal que x ∈ Uα0 ∈ T . Puesto que
S ∩ A es finito y S ∩ Uα0 ⊂ S ∩ A, entonces S ∩ Uα0 claramente es finito.
(⇐=) Sea A ⊂ X un conjunto acotado. Entonces existe x0 ∈ A y r0 > 0 fijos, tales que
A ⊂ b(x0, r0), donde b(x, r) denota la bola abierta de centro x y radio r > 0. Puesto queXes metrico, b(x0, r0) es compacto. Por tanto, dado Γ = Ux ∈ T cubrimiento de b(x0, r0)
se puede extraer de este, un cubrimiento finito Γ′ = Uxk∈ T : k = 1, · · · , n de b(x0, r0).
En consecuencia,
S ∩ A ⊂ S ∩ b(x0, r0) ⊂ S ∩ b(x0, r0) ⊆ S ∩n⋃
k=1
Uxk=
n⋃
k=1
(S ∩ Uxk),
es finito, ya que por hipotesis S ∩ Ux es finito ∀x ∈ X.
¤
Definicion 2.7.2. ([2], Seccion 1.1). Sea (X, T ) un espacio topologico. El soporte de una
medida µ, sop(µ) en (X,B(X )) se define como
sop(µ) =⋂F ∈ F : µ(Fc) = 0.
Notese que el soporte de una medida µ es el menor conjunto cerrado tal que µ
“desaparece” en su complemento.
Ejemplo 2.7.1. Soporte de la medida de Lebesgue en R.
Sea F ⊆ R cerrado. EntoncesR⊔ (R− F), esto implica que, m(R) = m(F) + m(R− F).
Si m(R− F) = 0, se tiene que m(R) = m(F), por tanto, R = F ya que m(R− F) = 0 y
F ⊆ R. Ası,
sop(m) =⋂F ∈ R cerrado : m(R− F) = 0 = R.
Ejemplo 2.7.2. Soporte de la medida de contar ν ∈ N . Por el teorema 2.6.1, si ν ∈ Nentonces existe un conjunto Zν = xnn≥1 tal que
ν =∞
∑n=1
λnδxn ,
donde λn = ν(xn) ∈ Z, ∀n ∈ N.
Sea F un conjunto cerrado en X, ası
ν(Fc) =∞
∑n=1
λnδxn(Fc) = 0 ⇐⇒ δxn(Fc) = 0, ∀n ∈ N⇐⇒ xn ∈ F, ∀n ∈ N.

2.7 Conjunto Cerrado Aleatorio 37
Puesto que, Zν = xnn≥1 es un subconjunto cerrado de X, se tiene que,
sop(ν) =⋂F ⊂ X cerrado : ν(Fc) = 0
=⋂F ⊂ X cerrado : Zν ⊆ F
= Zν = Gr(ω),
para algun ω ∈ Ω.
Observacion 2.7.1. Notese que el grafo asociado a un evento ω0 ∈ Ω, Gr(ω0), puede ser
el mismo para otros eventos ω ∈ Ω. Vease el siguiente ejemplo ilustrado.
Sea X = xn : n ∈ N una caminata aleatoria, donde cada paso aleatorio tiene espacio
de estados E = (±1, 0), (0,±1) y espacio muestral Ω. Dado ω0 ∈ Ω, supongase que
para tal evento ω0 se tiene la siguiente trayectoria xn(ω0) : n ∈ N y xn = x8∀n ≥ 9,
vease figura 2.10.
Figura 2.10: Trayectoria para ω0 ∈ Ω de la caminata aleatoria X .
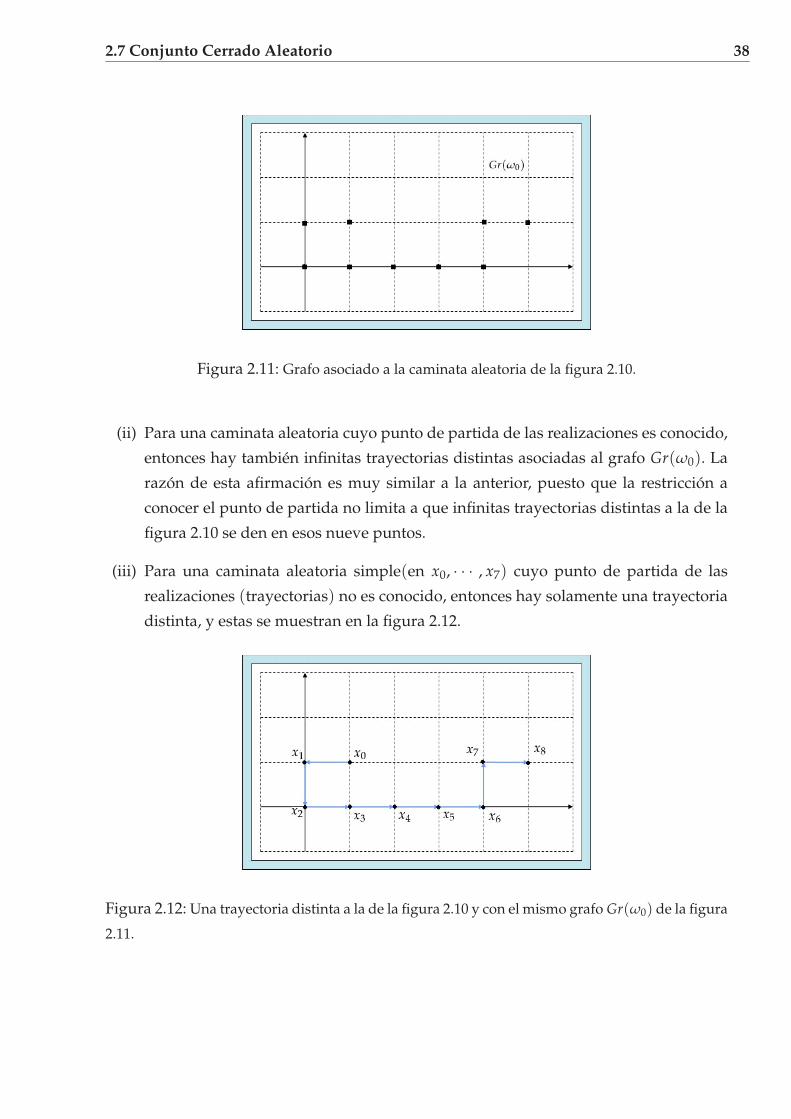
El grafo asociado a ω0 ∈ Ω, Gr(ω0), es mostrado en la figura 2.11.
¿Cuantas trayectorias distintas a xn(ω0) : n ∈ N pueden tener asociado el mismo
grafo, Gr(ω0)? La respuesta a esta pregunta esta dividida en varios casos, ya que depende
de las caracterısticas del proceso puntual en estudio.
(i) Para una caminata aleatoria cuyo punto de partida de las realizaciones no es
conocido, entonces hay infinitas trayectorias distintas asociadas al grafo Gr(ω0),
pues pueden haber infinitas trayectorias que se “muevan” en esos nueve puntos del
grafo Gr(ω0).
2.7 Conjunto Cerrado Aleatorio 38
Figura 2.11: Grafo asociado a la caminata aleatoria de la figura 2.10.
(ii) Para una caminata aleatoria cuyo punto de partida de las realizaciones es conocido,
entonces hay tambien infinitas trayectorias distintas asociadas al grafo Gr(ω0). La
razon de esta afirmacion es muy similar a la anterior, puesto que la restriccion a
conocer el punto de partida no limita a que infinitas trayectorias distintas a la de la
figura 2.10 se den en esos nueve puntos.
(iii) Para una caminata aleatoria simple(en x0, · · · , x7) cuyo punto de partida de las
realizaciones (trayectorias) no es conocido, entonces hay solamente una trayectoria
distinta, y estas se muestran en la figura 2.12.
Figura 2.12: Una trayectoria distinta a la de la figura 2.10 y con el mismo grafo Gr(ω0) de la figura
2.11.

2.7 Conjunto Cerrado Aleatorio 39
(iv) Si la caminata aleatoria es simple(en x0, · · · , x7) y se conoce el punto de partida
de las realizaciones, indudablemente para este grafo, Gr(ω0), no hay ninguna
trayectoria distinta (en estos nueve puntos) a la ya mostrada en la figura 2.10.
Depende de la complejidad del proceso si el “grafo de ω”, Gr(ω), con ω ∈ Ω
suministra la informacion necesaria para describir las realizaciones del proceso puntual,
evidentemente se tendra mas ventaja al conocer el grafo de todas las realizaciones , Gr(ω)
con ω ∈ Ω, si el proceso puntual es simple (ya que el numero de realizaciones que tengan
el mismo grafo asociado es “pequeno”), desde el punto de vista de medidas aleatorias,
esto quiere decir que es notorio que casi todas las realizaciones de un proceso puntual Φ
estan caracterizadas por su soporte, sop(Φ), el cual es un subconjunto localmente finito
de X(se probara en el siguiente teorema). Por esta razon los proceso puntuales simples
son a menudo interpretados como subconjuntos cerrados aleatorios localmente finitos deX.
Teorema 2.7.1. Para cada ν ∈ N el soporte de ν, sop(ν), es un subconjunto localmente finito deX. Ademas, N ∗ ∈ B(N ) y ν −→ sop(ν) es una funcion inyectiva de N ∗ al conjunto de todos
los subconjuntos localmente finito de X.
Demostracion:
Sea ν ∈ N una medida de contar, por el teorema 2.6.1, existe un conjunto Zν = xnn≥1
tal que
ν =∞
∑n=1
λnδxn ,
con λn ∈ N∪ 0 ∀n ∈ N, de donde sop(ν) = Zν = Gr(ω), para algun ω ∈ Ω.
Zν es localmente finito. En efecto, sea x ∈ X y sea b(x, r) la bola abierta de centro
x y radio r tal que 0 < r < ∞. Es claro que b(x, r) es un boreliano acotado de X. En
consecuencia
Zν ∩ b(x, r) =∞
∑n=1
λnδxn(b(x, r)) = ν(b(x, r)) < ∞.
Es decir, sop(ν) es localmente finito.
Siguiendo con la segunda parte del teorema, considerese EB,k y EN como en la
proposicion 2.6.2. Entonces,
N ∗ = ν ∈ N : ν(x) ≤ 1, ∀x ∈ X= ν ∈ N : ν(x) = 0, ∀x ∈ K ∪ ν ∈ N : ν(x) = 1, ∀x ∈ K= Ex,0 ∪ Ex,1.

2.7 Conjunto Cerrado Aleatorio 40
Como Ex,0 y Ex,1 estan en EN , entonces, Ex,0 ∪ Ex,1 ∈ σ(EN ).
Finalmente para probar la ultima parte del teorema, sean µ, ν ∈ N ∗ tal que
sop(µ) = sop(ν),
es decir,
Zµ = xnn≥1 = ymm≥1 = Zν.
Entonces existe una funcion biyectiva m : N −→ N tal que xn = ym(n), esto implica que
∞
∑n=1
δxn(B) =∞
∑m=1
δym(B), ∀B ∈ B,
es decir, µ = ν.
¤
La siguiente proposicion es util para explicar la conexion entre procesos puntuales
simples y conjuntos aleatorios.
Considerese el espacio F de todos los subconjuntos cerrados de un espacio Polaco Xincluyendo el conjunto vacıo.
Proposicion 2.7.2. Para cada compacto K ∈ K se define el conjunto,
FK = F ∈ F : F ∩ K = ∅.
Entonces la familia
EF = FK : K ∈ Kes base de alguna topologıa en F .
Demostracion:
Facilmente se ve que F es cubierto por los miembros de la familia EF , pues basta
tomar K = ∅ ∈ K, de donde
F∅ = F ∈ F : F ∩ ∅ = ∅ = F .
Sean K1, K2 ∈ K y teniendo en cuenta que la union finita de compactos es compacta,
se tiene que
FK1 ∩ FK2 = F ∈ F : F ∩ K1 = ∅ ∩ F ∈ F : F ∩ K2 = ∅= F ∈ F : F ∩ K1 = ∅ y F ∩ K2 = ∅= F ∈ F : F ∩ (K1 ∪ K2) = ∅= FK1∪K2 ∈ EF .

2.7 Conjunto Cerrado Aleatorio 41
En consecuencia EF es base de alguna topologıa en F .
¤
De la proposicion anterior se tiene directamente el siguiente corolario.
Corolario 2.7.1. La familia EF genera una topologıa TF en F .
Ahora con la topologıa TF generada por los conjuntos FK = F ∈ F : F ∩ K = ∅ se
tiene la σ-algebra de Borel B(F ) de F , que es la σ-algebra generada por los conjuntos de
cerrados FK,
B(F ) = σ(EF ),
es decir, los borelianos de F son generados por los conjuntos FK = F ∈ F : F ∩ K = ∅,
para cada K ∈ K. Con esta σ-algebra se termina de completar la estructura para dar la
siguiente definicion.
Definicion 2.7.3. Sea (Ω,A,P) un espacio de probabilidad. Un conjunto cerrado
aleatorio en X es una funcion medible
Ξ : (Ω,A,P) −→ (F ,B(F )).
Teorema 2.7.2. Si Φ es un proceso puntual en X entonces el soporte supp Φ es un conjunto
cerrado aleatorio. Por otro lado, si Ξ es un conjunto cerrado localmente finito en X (es decir, un
conjunto cerrado aleatorio enX tal que Ξ(ω) es localmente finito para cualquier ω ∈ Ω) entonces
Φ(·) = card(Ξ ∩ ·) es un proceso puntual simple en X.
Para ver la demostracion de este teorema, consulte [2], seccion 2.1, teorema 2.5.
CAPITULO 3
Medida de Hausdorff
Para definir los conjuntos k-rectificables es necesario introducir una nueva medida,
derivada de la construccion de Caratheodory por cubrimientos con bolas abiertas k-
dimensionales de subconjuntos de un espacio metrico X. Esta medida se caracteriza por
medir conjuntos bastante irregulares como los grafos de fractales. Como herramienta
previa para la construccion de la medida de Hausdorff se hace una breve revision de
un caso particular de la construccion de Caratheodory, como se presenta en la seccion a
continuacion.
3.1. Construccion de Caratheodory en un espacio metrico
En la seccion 2.5 ya fue revisado la extension de premedidas a medidas por el Teorema
de Carhatheodory usando cubrimientos cuyos conjuntos que cubren “son bastante
generales”, en esta seccion se usa una clase particular de cubrimientos, la clase de los
conjuntos deX, que tienen “diametro”, definido como el supremo de las longitudes entre
cada dos puntos de determinado conjunto), es decir, si A ⊂ X, el diametro de A es
diam(A) = supx,y∈A
‖x − y‖,
donde ‖ · ‖ es una norma en X.
Sea X un espacio metrico y C una coleccion de subconjuntos de X, que contienen al
vacıo. Considerese la premedida λ : C −→ [0, ∞].
A partir de esta premedida se construyen medidas preliminares λδ para 0 < δ ≤ ∞ de
la siguiente manera:
42

3.1 Construccion de Caratheodory en un espacio metrico 43
Para E ⊂ X y δ > 0 se tiene que,
λδ(E) = inf
∞
∑i=1
λ(Ci) : (Ci) ∈ UE,δ
,
donde UE,δ =(Ci)
∞i=1 ∈ C ∈ C : diam(C) ≤ δ : E ⊂ ⋃∞
i=1 Ci
.
Observacion 3.1.1. Notese que estas medidas λδ son medidas exteriores construidas a
partir de premedidas λ por cubrimientos cuyos elementos son de diametro menor o igual
a δ.
Proposicion 3.1.1. Las medidas preliminares λδ son decrecientes respecto a δ. Es decir, dado
0 < δ ≤ ǫ ≤ ∞ entonces λδ ≥ λǫ.
Demostracion:
Sean δ, ǫ numeros positivos tales que 0 < δ ≤ ǫ ≤ ∞. Entonces dado E ∈ X, claramente
que todo cubrimiento E mediante δ es un cubrimiento de E mediante ǫ, esto es,
UE,δ =
(Ci)
∞i=1 ∈ C ∈ C : diam(C) ≤ δ : E ⊂
∞⋃
i=1
Ci
⊆
(Ci)∞i=1 ∈ C ∈ C : diam(C) ≤ ǫ : E ⊂
∞⋃
i=1
Ci
= UE,ǫ.
Por lo tanto,
inf
∞
∑i=1
λ(Ci) : (Ci) ∈ UE,ǫ
≤ inf
∞
∑i=1
λ(Ci) : (Ci) ∈ UE,δ
.
¤
De la proposicion anterior se desprende el siguiente corolario.
Corolario 3.1.1. Para cada E ⊆ X,
µ(E) = lımδ−→0+
λδ(E)
existe, y ademas
µ(E) = supδ>0
λδ(E)
siempre que E ⊂ X.
La funcion µ es llamada el resultado de la construccion de Caratheodory de la
premedida λ en C, y λδ la medida aproximada de tamano δ.
Notese que todos los subconjuntos abiertos de X son µ-medibles (por criterio de
Caratheodory). Sin embargo, no todos los subconjuntos abiertos de X son λδ-medibles.

3.2 Construccion de la medida de Hausdorff 44
3.2. Construccion de la medida de Hausdorff
Considerese X = Rn con la metrica usual en Rn. Sea Ck la clase de todas las bolas
abiertas de Rk con k ≤ n. Para cada k ∈ 0, 1, 2, · · · , n fijo, sea
mk : Ck −→ [0, ∞),
donde mk es la medida de Lebesgue restringida a la clase Ck en P(Rk).
Lema 3.2.1. Para todo ǫ > 0 y f medible positiva, se tiene que
∫Rnf (ǫx)dx = ǫ−n
∫Rnf (x)dmn(x),
donde mn es la medida de Lebesgue en Rn.
Este Lema es tomado de [8], Lema 7.2.1.
Proposicion 3.2.1. Para cada k ∈ 0, 1, 2, · · · , n fijo, la medida k-esima
mk : Ck −→ [0, ∞)
de Lebesgue en Ck ⊂ P(Rn) es
mk(bk(x, ρ)) = αkρk,
donde αk = πk/2
Γ((k+2)/2), Γ(.) la funcion Gamma y bk(x, ρ) es la bola abierta k-dimensional de
centro x ∈ Rk y radio ρ ≥ 0 en Ck.
Demostracion:
Sea bkρ = bk(x, ρ) ∈ Ck una bola abierta de radio ρ > 0 en Rk. Entonces por el lema
3.2.1,
mk(bkρ) =
∫
x:‖x‖<ρdx =
∫x:
∥∥∥xρ ∥∥∥<1 dx = ρk
∫
x:‖x‖<1dx = ρkαk,
donde αk es el volumen de la bola k-dimensional de radio 1. Por lo tanto, basta calcular
αk. En efecto,
αk =∫
x:‖x‖<1dx =
∫ 1
−1
(∫
x22+x2
3+···+x2k<1−x2
1
dx2dx3 · · · dxk
)dx1.
Notese que la integral entre parentesis es igual al volumen de la bola k − 1-dimensional
de radio (1 − x21)
1/2 en Rk−1, entonces usando nuevamente el lema 3.2.1,
∫
x22+x2
3+···+x2k<1−x2
1
dx2dx3 · · · dxk = (1− x21)
k−12
∫
x22+x2
3+···+x2k<1
dx2dx3 · · · dxk = (1− x21)
k−12 αk−1.

3.2 Construccion de la medida de Hausdorff 45
Entonces
αk =∫ 1
−1(1 − x2
1)k−1
2 λk−1dx1 = λk−1
∫ 1
−1(1 − x2
1)k−1
2 dx1 = αk−1 Ik−1,
donde Ik =∫ 1−1(1 − t2)k/2dt, para k = 2, 3, · · · , n.
Calculando Ik,
Ik =∫ 1
−1(1 − t2)k/2dt = 2
∫ 1
0(1 − t2)k/2dt = 2
∫ π/2
0cosk+1θdθ
= 2k∫ π/2
0sen2cosk−1θdθ = k
(∫ π/2
0cosk−1θdθ −
∫ π/2
0cosk+1θdθ
)= k(Ik−2 − Ik),
es decir,
Ik =k
k + 1Ik−2.
Teniendo en cuenta que I0 = 2, I1 = π/2 se tiene que,
I2k =2k+1k!
1.3. · · · .(2k + 1)
y
I2k+1 =(2k + 1)
2k+1(k + 1)!π.
Dado que
αk = αk−1 Ik−1 =k−1
∏j=0
Ij,
entonces
α2k =2k−1
∏j=0
Ij =k−1
∏j=0
(I2j I2j+1) =k−1
∏j=0
π
j + 1=
πk
k!=
πk
Γ(k + 1)
y
α2k+1 =2k
∏j=0
Ij = I2k
2k−1
∏j=0
=2k+1πk
1.3. · · · .(2k + 1)=
πk+1/2
Γ(k + 3/2),
ası,
αk =πk/2
Γ((k + 2)/2).
¤
Teniendo la premedida k-esima mk se puede definir la medida k-esima de Hausdorff
como sigue.

3.3 Propiedades de la medida de Hausdorff 46
Sea E ⊆ Rn y δ > 0, la k-esima medida aproximada de Hausdorff de tamano δ es
Hkδ(E) = inf
∞
∑i=1
mk(bρi) : (bρi
) ∈ UE,δ
= inf
∞
∑i=1
αkρki : (Bρi
) ∈ UE,δ
,
donde ρi es el radio de la bola abierta bρi,
UE,δ =
(bρi
)i∈N ∈ Cn : ρi <δ
2, ∀i ∈ N y E ⊂
∞⋃
i=1
bρi
y
αk =πk/2
Γ( k2 + 1)
.
Usando el Corolario 3.1.1, se llega a la siguiente medida:
Hk(E) = lımδ−→0+
inf(bρi
)∈UE,δ
∞
∑i=1
αkρki ,
llamada, la medida de Hausdorff Hk de orden k en Rn.
3.3. Propiedades de la medida de Hausdorff
La medida de Hausdorff Hk de orden k, para cualquier k ∈ 0, 1, · · · , n fijo, cumple
con las siguientes propiedades:
1. Definida positiva, nula para el conjunto vacıo, monotona y sub-σ aditiva; es decir,
(i) Hk(E) ≥ 0 para cualquier E ⊆ Rn,
(ii) Hk(∅) = 0,
(iii) Si E ⊆ E′, entonces Hk(E) ≤ Hk(E′),
(iv) Si E =⋃
j Ej, entonces Hk(E) ≤ ∑j Hk(Ej).
2. Por Caratheodory, existe una σ-algebra MHk llamada σ-algebra de conjuntos Hk-
medibles.
3. Puesto que Hk se construye usando el Teorema de Caratheodory partiendo de
cubrimientos por bolas abiertas, entonces, todo boreliano es Hk-medible, es decir,
B(X) ⊆ MHk
4. La medida de Hausdorff de orden n coincide con la medida exterior de Lebesgue,
Hn = m∗.

3.4 Ejemplos 47
5. Sea Z = xini=1 un subconjunto finito en Rn. Entonces existe ρ > 0 tal que
Z ⊂n⊔
i=1
b(xi, ρ),
donde b(xi, ρ) es la bola de centro xi y radio ρ. Ası,
H0(Z) = lımδ−→0+
inf
n
∑i=1
α0ρ0 : Z ⊂n⊔
i=1
B(xi, ρ) con ρ <δ
2
= lım
δ−→0+
n
∑i=1
1 = n = N(Z),
donde N es la medida de contar (vease figura 3.1), y
Hk(Z) = lımδ−→0+
inf
n
∑i=1
αkρk : Z ⊂n⊔
i=1
b(xi, ρ) con ρ <δ
2
= lım
δ−→0+αkρkn = 0,
siempre que k ≥ 1. Por lo tanto, si Z es un conjunto finito entonces
Hk(Z) =
N(Z) si k = 0
0 si k > 0
Figura 3.1: Conjunto finito de puntos enR2
3.4. Ejemplos
Sea X = R2. A continuacion se hace una revision de la k-medida de Hausdorff para
tres subconjuntos basicos de dicho espacio.

3.4 Ejemplos 48
Ejemplo 3.4.1.
(i) Un punto. Por la propiedad 5 de la medida de Hausdorff, se tiene directamente que,
Hk(Z) =
1 si k = 0
0 si k = 1, 2
(ii) Un segmento de recta. Sin perdida de generalidad, considerese dicho segmento
como un intervalo I = [a, b]. Por las propiedades 4 y 5 de la medida de Hausdorff,
se tiene de manera respectiva que H2(I) = 0 y H0(I) = ∞. Ahora bien, para k = 1
sea δ > 0 y n ∈ N tal que (vease Figura 3.2)
ρ =b − a
2n<
δ
2.
Entonces,
H1δ(I) =
n
∑k=1
α1ρ =n
∑k=1
2(b − a)
2n= b − a.
Puesto que δ −→ 0+ ⇐⇒ n −→ ∞, se tiene que
H1(I) = lımδ−→0+
H1δ(I) = b − a.
(iii) Un rectangulo. Analogamente a la parte (ii), sea R = [a, b] × [c, d] un rectangulo
en R2. Por las propiedades 4 y 5 de la medida de Hausdoff, se tiende de manera
respectiva que las medidas H2(R) = (b − a)(d − c) y H0(R) = ∞. Ahora bien, para
k = 1 sea δ > 0 y n ∈ N tal que (vease Figura 3.2)
ρ = max
b − a
n,
d − c
n
<
δ
2.
Entonces,
H1δ(R) =
n2
∑k=1
α1ρ =n2
∑k=1
2 max
b − a
n,
d − c
n
= 2n maxb − a, d − c.
Puesto que δ −→ 0+ ⇐⇒ n −→ ∞, se tiene que
H1(R) = lımδ−→0+
H1δ(R) = lım
n−→∞2n maxb − a, d − c = ∞.
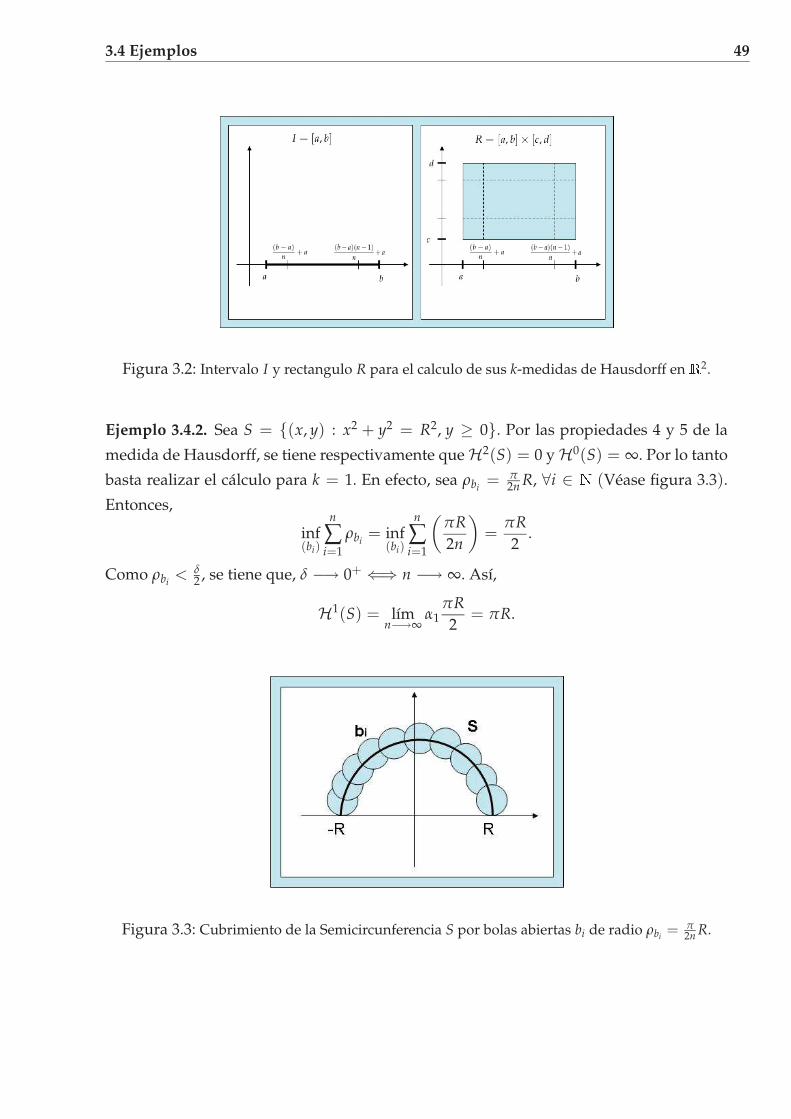
3.4 Ejemplos 49
Figura 3.2: Intervalo I y rectangulo R para el calculo de sus k-medidas de Hausdorff enR2.
Ejemplo 3.4.2. Sea S = (x, y) : x2 + y2 = R2, y ≥ 0. Por las propiedades 4 y 5 de la
medida de Hausdorff, se tiene respectivamente que H2(S) = 0 y H0(S) = ∞. Por lo tanto
basta realizar el calculo para k = 1. En efecto, sea ρbi= π
2n R, ∀i ∈ N (Vease figura 3.3).
Entonces,
inf(bi)
n
∑i=1
ρbi= inf
(bi)
n
∑i=1
(πR
2n
)=
πR
2.
Como ρbi<
δ2 , se tiene que, δ −→ 0+ ⇐⇒ n −→ ∞. Ası,
H1(S) = lımn−→∞
α1πR
2= πR.
Figura 3.3: Cubrimiento de la Semicircunferencia S por bolas abiertas bi de radio ρbi= π
2n R.

CAPITULO 4
Tangencia Conica y Rectificabilidad
En este capıtulo se considera una generalizacion de la tangencia lineal, la tangenca
conica, que es de mucha utilidad sobre todo en aquellos puntos donde la tangencia lineal
no esta definida. Se trata este tipo de tangencia y algunas definiciones necesarias para
introducir los conceptos de rectificabilidad y ası enunciar el Teorema de la Tangencia
Conica que caracteriza la existencia de tangentes lineales k-dimensionales en casi todos
los puntos (respecto a la medida de Hausdorff de orden k) de un determinado conjunto.
4.1. Tangencia Conica
Para generalizar el concepto de plano tangente o recta tangente (para superficies o
curvas regulares respectivamente), se introduce el concepto de tangencia conica en un
punto de un conjunto cualquiera de un espacio vectorial normado.
Definicion 4.1.1. Sea X un espacio vectorial normado, A ⊂ X y a ∈ A ⊂ X. El cono
tangente de A en a, es el cono cerrado en X, Tan(A, a) ⊆ ~0, tal que: Dado u ∈ X no
nulo, u ∈ Tan(A, a) si y solo si para cualquier ǫ > 0 existe b ∈ A con 0 < ‖b − a‖ < ǫ y
∥∥∥∥u
‖u‖ − (b − a)
‖b − a‖
∥∥∥∥ < ǫ.
Observacion 4.1.1. Propiedades de la tangencia conica:
1. Si u ∈ Tan(A, a) y 0 ≤ t ∈ R entonces tu ∈ Tan(A, a).
2. Tan(A, a) = Tan(A, a).
50
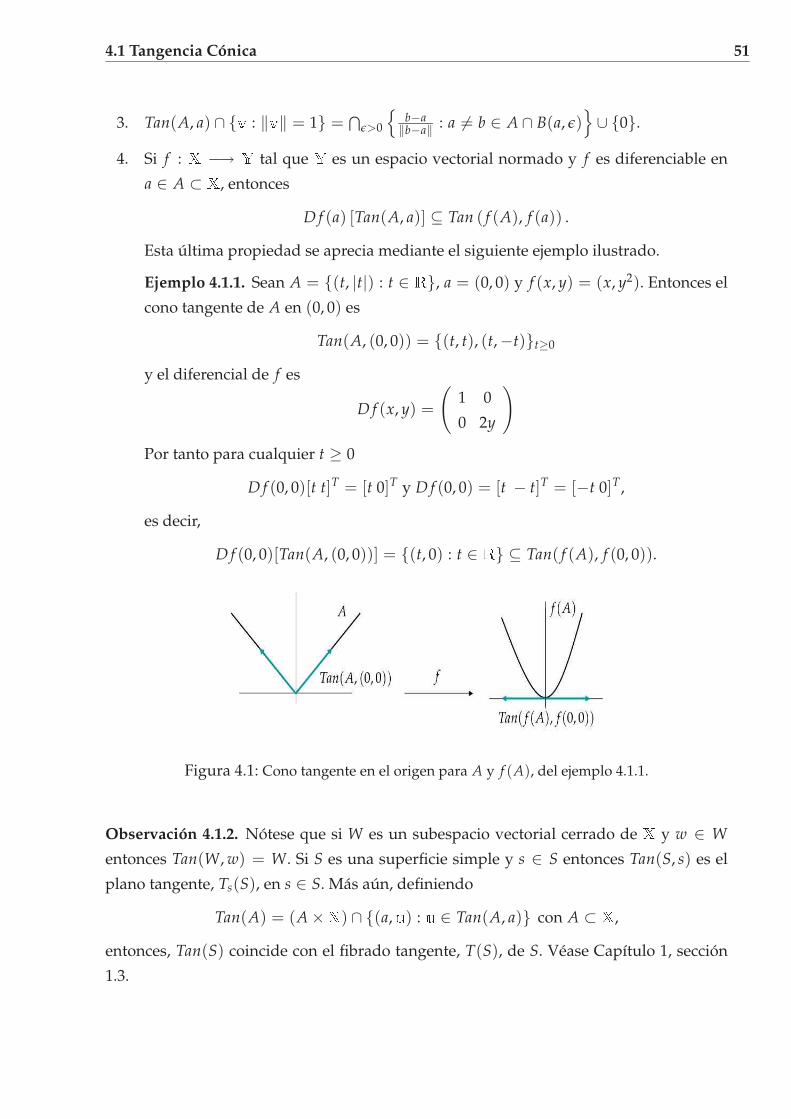
4.1 Tangencia Conica 51
3. Tan(A, a) ∩ v : ‖v‖ = 1 =⋂
ǫ>0
b−a
‖b−a‖ : a 6= b ∈ A ∩ B(a, ǫ)∪ 0.
4. Si f : X −→ Y tal que Y es un espacio vectorial normado y f es diferenciable en
a ∈ A ⊂ X, entonces
D f (a) [Tan(A, a)] ⊆ Tan ( f (A), f (a)) .
Esta ultima propiedad se aprecia mediante el siguiente ejemplo ilustrado.
Ejemplo 4.1.1. Sean A = (t, |t|) : t ∈ R, a = (0, 0) y f (x, y) = (x, y2). Entonces el
cono tangente de A en (0, 0) es
Tan(A, (0, 0)) = (t, t), (t,−t)t≥0
y el diferencial de f es
D f (x, y) =
(1 0
0 2y
)
Por tanto para cualquier t ≥ 0
D f (0, 0)[t t]T = [t 0]T y D f (0, 0) = [t − t]T = [−t 0]T,
es decir,
D f (0, 0)[Tan(A, (0, 0))] = (t, 0) : t ∈ R ⊆ Tan( f (A), f (0, 0)).
Figura 4.1: Cono tangente en el origen para A y f (A), del ejemplo 4.1.1.
Observacion 4.1.2. Notese que si W es un subespacio vectorial cerrado de X y w ∈ W
entonces Tan(W, w) = W. Si S es una superficie simple y s ∈ S entonces Tan(S, s) es el
plano tangente, Ts(S), en s ∈ S. Mas aun, definiendo
Tan(A) = (A ×X) ∩ (a,u) : u ∈ Tan(A, a) con A ⊂ X,
entonces, Tan(S) coincide con el fibrado tangente, T(S), de S. Vease Capıtulo 1, seccion
1.3.

4.1 Tangencia Conica 52
En los siguientes ejemplos se calcula el cono tangente en todo punto de los conjuntos
especificados y se ilustra en los puntos claves dicho tangente. Se toman estos conjuntos
ya que los dos primeros son los de interes al final de este trabajo y los otros dos porque
ilustran de manera sencilla y elegante la tangencia conica en sus singularidades.
4.1.1. Ejemplos
Ejemplo 4.1.2. Sea A = x0, x1, x2, · · · , xn ⊂ Z2 como se ilustra en la figura 4.2. El
cono tangente de A en xj para cualquier j = 0, 1, · · · , n es el vector nulo. En efecto,
supongase que existe un j ∈ 0, 1, · · · , n tal que hay un u 6= 0 en Tan(A, xj). Entonces
dado cualquier ǫ > 0 se tiene un xi tal que 0 ≤ ‖xi − xj‖ < ǫ. Luego necesariamente i = j,
por lo tanto, Tan(A, xj) = 0, para cualquier j = 0, 1, · · · , n.
Figura 4.2: Cono tangente para cada punto de un subconjunto finito de Z2
Ejemplo 4.1.3. Considerese ahora A como los segmentos xixi+1, para i ≥ 0, es decir,
A =∞⋃
i=1
xixi+1.
Es claro que Tan(A, x) = (xi+1 − xi)t : t ∈ R, para algun i = 0, 1, 2, · · · , siempre que
x ∈ xixi+1 sin los extremos. Ahora para cada xj,
Tan(A, xj) = (xj+1 − xj)t, (xj−1 − xj)tt≥0.

4.1 Tangencia Conica 53
Figura 4.3: Cono tangente de algunos vertices de una caminata aleatoria simple en Z2
Ejemplo 4.1.4. Sea γ : (−π, π) −→ R2 una curva, definida como
γ(t) =
(cos(t)− 1,−sen(t)) si t ∈ (−π, 0)
(1 − cos(t), sen(t)) si t ∈ [0, π)
Es claro que Tan(γ, γ(t)) = γ′(t)s : s ∈ R si t 6= 0. Ahora para t = 0 sea
u = u(θ) = (cos(θ), sen(θ)) con θ ∈ [0, 2π]. Se desea hallar b ∈ γ tal que ‖b‖ < ǫ
y ∥∥∥∥u
‖u‖ − b
‖b‖
∥∥∥∥ < ǫ para cualquier ǫ > 0.
Sea b ∈ γ, entonces hay un t ∈ (−π, π) tal que b = γ(t), donde ‖γ(t)‖ = 2|sen(t/2)|. Ası
b
‖b‖ =
(sen
(t
2
), cos
(t
2
)).
Llamando
v =u
‖u‖ − b
‖b‖ ,
se tiene que
‖v‖2 = 2
(1 − sen
(θ +
t
2
)).
Entonces ‖v‖ < ǫ para cualquier ǫ > 0 pequeno, es equivalente a pedir ‖v‖ −→ 0+, es
decir, (1 − sen
(θ +
t
2
))−→ 0+ ⇐⇒ θ −→ (4k + 1)π − t
2, con k ∈ Z.
Ademas, ‖b‖ < ǫ, ∀ǫ > 0, lo cual del mismo modo es equivalente a
‖b‖ −→ 0+ ⇐⇒ 2
∣∣∣∣sen
(t
2
)∣∣∣∣ −→ 0+ ⇐⇒ t −→ 0+.

4.1 Tangencia Conica 54
En consecuencia,
θ = lımt−→0+
θ(t) =4k + 1
2π.
Como θ ∈ (−π, π), entonces θ = π/2. Ası el cono tangente para t = 0 es
Tan(γ(0, 0)) = (0, 1)s : s ≥ 0.
Figura 4.4: Cono tangente de γ en cualquier punto.
Ejemplo 4.1.5. Considerese
A = (x, y) ∈ R2 : x = rcos(θ), y = rsen(θ) con r ∈ [0,√
2] ∧ θ ∈ [π/4, 3π/4].
Si x ∈ int(A) entonces Tan(A,x) = R2.
Si x = (x, y) ∈ Fr(A) (Frontera de A) entonces,
Tan(A, (x, y)) =
(x, y) : y − x ≥ 0 si (x, y) ∈ (0, 1) × (0, 1)
(x, y) : y + x ≥ 0 si (x, y) ∈ (−1, 0) × (0, 1)
(x, y) : y + cotan(θ)x ≤ 0 si (x, y) ∈ (−1, 1) × (1,√
2].
Ahora bien, si a = (0, 0). Sea u = u(α) = (cos(α), sen(α), entonces b ∈ A si y
solo si b = (rcos(θ), rsen(θ)), para algun (r, θ) ∈ [0,√
2] × [π/4, 3π/4]. Es claro que
‖b‖ = r (no depende de θ), llamando
v =u
‖u‖ − b
‖b‖ , con r 6= 0,

4.2 k-Tangencia Conica 55
ası ‖v‖2 = 2(1 − cos(α − θ)). Notese que ‖v‖ < ǫ para todo ǫ > 0, es equivalente
a ‖v‖ −→ 0+ cuando ǫ −→ 0+, es decir, cos(α − θ) −→ 1, cuando α − θ −→ 2kπ
con k ∈ Z. Teniendo en cuenta que α − θ ∈ [−3π/4, 7π/4], es directo que α −→ θ.
Concluyendose que
Tan(A, (0, 0)) = (x, y) ∈ R2 : |x| ≤ y.
Figura 4.5: Cono tangente de γ en (0, 0)
4.1.2. Diferenciabilidad Relativa
Definicion 4.1.2. SeaY un espacio vectorial normado y f : D ⊆ X −→ Y una funcion. Se
dice que f es relativamente diferenciable en a ∈ D, y L es el diferencial relativo de f en
a ∈ D, si y solo si, existe un entorno, Ua, de a en X y una funcion continua g : Ua −→ Ytal que g es diferenciable en a con
f | (S ∩ Ua) = g| (S ∩ Ua) y L = Dg(a)| Tan(A, a).
Siempre que f : D −→ Y, a ∈ D y f tiene diferencial relativo L en a ∈ D, se define
D f (a) = L.
4.2. k-Tangencia Conica
La tangencia conica ya vista se restringira a un numero mas pequeno de vectores,
usando la medida de Hausdorff de orden k y una funcion de densidad de una medida

4.2 k-Tangencia Conica 56
en determinado punto, que geometricamente generalmente son conjuntos ideales para el
estudio de diferenciabilidad (comun o aproximada, segun sea el caso) de determinados
subconjuntos de Rn.
Definicion 4.2.1. Sea µ una medida en un espacio metrico X y sea k tal que, 0 ≤ k < ∞.
Dado A ⊆ X y a ∈ A, es llamada la densidad superior (inferior) k-dimensional de µ en
a a la funcion definida como
Θk(A, µ, a) = lım sup
ǫ−→0+
µ(A ∩ b(a, ǫ))
αkǫk
(Θk(A, µ, a) = lım inf
ǫ−→0+
µ(A ∩ b(a, ǫ))
αkǫk
).
En caso de que las densidades superior e inferior sean iguales, entonces el valor comun
es la densidad k-dimensional de µ en a ∈ A, denotada por
Θk(A, µ, a).
Observacion 4.2.1. Notese que αkǫk es el volumen de una bola de radio ǫ en Rk. Por
tanto se puede decir que la densidad k-dimensional compara la medida, µ, de un “pedazo
pequeno” de un conjunto A con el volumen de una bola k-dimensional de diametro tan
“pequeno” como el “pedazo” de dicho conjunto A.
Ejemplo 4.2.1. Sea A = [a, b], µ = m la medida de Lebesgue en R y X = R2. Sea
0 < ǫ < |b − a|, entoncesm([a, b] ∩ b(a, ǫ))
αkǫk=
ǫ
αkǫk,
por tanto,
Θk([a, b], m, a) lım sup
ǫ−→0+
1
αkǫk−1=
0 si k = 012 si k = 1
∞ si k = 2
En este caso Θk([a, b], m, a) = Θk([a, b], m, a) = Θk([a, b], m, a).
Ejemplo 4.2.2. Sea A = [0, 1] × [0, 1], 0 < ǫ < 1 y µ = Hk la k-medida de Hausdorff.
Entonces,
Hk(A ∩ b(0, ǫ)) =
∞ si k = 0, 1
πǫ2
4 si k = 2.
Pero para calcular la densidad superior e inferior para los casos cuando k = 0, 1 se debe
proceder con el calculo de la k-medida de Hausdorff para dichos k. Sea ρ(bi) = ǫ2n . Ası,
infbi
n2
∑i=1
αk
( ǫ
2n
)k=
αkn2ǫk
2knk,

4.2 k-Tangencia Conica 57
por lo tanto,
Θk(A,Hk, 0) = lım sup
ǫ−→0+
lımn−→∞
αkn2ǫk
αk2knkǫk= lım
n−→∞
1
2knk−2=
∞ si k = 0, 114 si k = 2.
Ya definida la densidad superior, es usado este concepto para definir de inmediato la
k-Tangencia Conica como sigue.
Definicion 4.2.2. Sea A ⊂ Rn y a ∈ A. El cono tangente k-aproximado de A en a es el
conjunto
Tank(A, a) =⋂
Tan(B, a) : Θk(A − B,Hk, a) = 0
.
Cuando no hay un conjunto B tal que,
Θk(A − B,Hk, a) = 0, para k = 0, 1, · · · , n,
se dice que,
Tank(A, a) = Tan(A, a), para k = 0, 1, · · · , n.
Veanse los siguientes ejemplos donde se calcula dicha tangencia en el punto singular
del conjunto A especificado.
Ejemplo 4.2.3. Sea X = R2. Para A = (x, y) : y = |x|, x ∈ [−1, 1] el cono tangente en 0
es
Tan(A, 0) = (1, 0)t, (0, 1)tt≥0.
Ahora bien, considerese el siguiente conjunto
B = (x, y) : x2 + (y − 1)2 = 1, y ≤ 1.
Sea 0 < ǫ < 1, entonces
(A − B) ∩ b(0, ǫ) =
(x, y) : y < |x|, x ∈
(−√
2ǫ
2,
√2ǫ
2
)− 0
,
vease figura 4.6.
tomando ρi = ǫ2n , se tiene que
Hk((A − B) ∩ b(0, ǫ)) = lımn−→∞
αk
2n
∑i=1
( ǫ
2n
)k= lım
n−→∞
αkǫk
2k−1nk−1.
Por tanto,
Θk(A − B,Hk, 0) = lım
ǫ−→0+lım
n−→∞
αkǫk
2k−1nk−1
αkǫk= lım
n−→∞
1
2k−1nk−1=
∞ si k = 0
1 si k = 1
0 si k = 2.

4.2 k-Tangencia Conica 58
Figura 4.6: Graficos de A, B y la bola de centro 0 y radio ǫ, del ejemplo 4.3.2.
En consecuencia
Tan2(A, 0) =
Tan(S, a) : Θk(A − S,H2, a) = 0
= Tan(A, 0) ∩ Tan(B, 0) = 0.
Ejemplo 4.2.4. Sea A = (x, y) : y = |x|. Para cada m ∈ R, sea Bm = (x, y) : y = mx.
Entonces,
(A − Bm) ∩ b(0, ǫ) =
(x, y) : y = |x| < ǫ − 0 si m 6= ±1
(x, y) : y = −x, − ǫ < x < 0 si m = 1
(x, y) : y = x, 0 < x < ǫ si m = −1
Vease figura 4.7, donde se aprecia la familia de rectas Bmm∈R y el conjunto A. Por tanto,
Por tanto,
Θ0(A − Bm, 0) = lım supǫ−→0+
H0((A − Bm) ∩ b(0, ǫ))
=
lımǫ−→0+ lımn−→∞ ∑
2ni=1 α0
(ǫ
2n
)0si m 6= ±1
lımǫ−→0+ lımn−→∞ ∑2ni=1 α0
(ǫ
2n
)0si m = ±1
= ∞,
para cualquier m ∈ R.

4.2 k-Tangencia Conica 59
Figura 4.7: Graficos de A y la familia de rectas Bm.
Θ1(A − Bm, 0) = lım supǫ−→0+
H1((A − Bm) ∩ b(0, ǫ))
α1ǫ
=
lımǫ−→0+ lımn−→∞
1α1ǫ ∑
2ni=1 α1
(ǫ
2n
)si m 6= ±1
lımǫ−→0+ lımn−→∞1
α1ǫ ∑ni=1 α1
(ǫ
2n
)si m = ±1
=
1 si m 6= ±112 si m = ±1
Θ2(A − Bm, 0) = lım supǫ−→0+
H2((A − Bm) ∩ b(0, ǫ))
α2ǫ2
=
lımǫ−→0+ lımn−→∞
1α2ǫ2 ∑
2ni=1 α2
(ǫ
2n
)2si m 6= ±1
lımǫ−→0+ lımn−→∞1
α2ǫ2 ∑ni=1 α2
(ǫ
2n
)2si m = ±1
= 0,
para cualquier m ∈ R.
Puesto que Tan(Bm, 0) = (1, m)t : t ∈ R+ ∪ 0 donde Θ2(A − B,H2, 0) = 0, para
cualquier m ∈ R, se tiene que
Tan2(A, 0) =⋂Tan(Bm, 0) : Θ2(A − B,H2, 0) = 0 = 0.
Para el caso k = 0, 1 el cono tangente k-aproximado, Tank(A, 0), en 0 coincide con el cono
tangente, Tan(A, 0) en 0.

4.3 Teorema de la Tangencia Conica 60
Ejemplo 4.2.5. Para los ejemplos 4.1.4 y 4.1.5, los conos tangentes k-aproximados son:
Tank(A, 0) =
Tan(A, 0) si k = 0, 1
0 si k = 2
y
Tank(A, 0) = Tan(A, 0), k = 0, 1, 2,
respectivamente.
4.2.1. k-Diferenciabilidad Aproximada
Definicion 4.2.3. Sea f : D ⊆ Rn −→ Rm. Se dice que f es k-aproximadamente
diferenciable en a ∈ D si y solo si, existe un entorno, Ua, de a en Rn y una funcion
g : Ua −→ Rm tal que g es diferenciable en a y
Θk(x : f (x) 6= g(x),Hk, a) = 0,
para todo x ∈ D, casi seguramente con respecto a la medida de Hausdorff Hk (Hk − c.s.).
Esto implica que f es relativamente diferenciable para E = x : f (x) = g(x) en a, y
que el diferencial relativo de f en a esta determinado por la restriccion de Dg(a) a
Tan (x : f (x) = g(x), a) ⊇ Tank (x : f (x) = g(x), a)
Es llamado el k-diferencial aproximado de f en a, apkD f (a), al diferencial Dg(a)
restringido a Tank(x : f (x) = g(x), a), es decir,
apkD f (a) = Dg(a)| Tank(x : f (x) = g(x), a).
4.3. Teorema de la Tangencia Conica
En esta seccion se revisan, las definiciones y proposiciones, necesarias para enunciar el
Teorema principal de este capıtulo y fundamental para el capıtulo siguiente.
4.3.1. Funcion Lipschitz
Definicion 4.3.1. Una funcion f : X −→ Y, donde (X, dX) y (Y, dY) son espacios
metricos, es Lipschitz si y solo si existe un numero real positivo M (constante de
Lipschitz) tal que
dY( f (a), f (b)) ≤ MdX(a, b),

4.3 Teorema de la Tangencia Conica 61
siempre que a, b ∈ X.
La constante M es una constante de Lipschitz para f . Cada funcion Lipschitz tiene una
mınima constante de Lipschitz, la cual sera denotada
Lip( f ).
Definicion 4.3.2. Sean X,Y espacios metricos. Decimos que f : X −→ Y es localmente
Lipschitz si y solo si para cada punto x ∈ X existe un entorno Ux de x tal que f |Uxes
Lipschitz.
Proposicion 4.3.1. Si A es un subconjunto convexo de un espacio vectorial normado X, f es
Lipschitz con Lip( f ) ≤ M si y solo si
lımb−→a
dY( f (a), f (b))
‖a − b‖X ≤ M,
para a ∈ A.
La demostracion se puede consultar en [5], subseccion 2.2.7.
Corolario 4.3.1. Si f : X −→ Y es diferenciable, entonces es Lipschitz.
4.3.2. Conjuntos Rectificables
Definicion 4.3.3. Dado un entero k ∈ 0, 1, · · · , n fijo, se dice que un subconjunto E ∈ Rn es
1. k-rectificable si y solo si existe una funcion Lipschitz f tal que
f (A) = E,
para algun subconjunto acotado A de Rk;
2. (Hk, k)-rectificable si y solo si
E es Hk-medible,
Hk(E) < ∞
E =⋃∞
i=0 Wi con Hk(W0) = 0 tal que Wi es k-rectificable ∀i ∈ N,
3. Hk-rectificable si y solo si E ∩ K es (Hk, k)-rectificable para cualquier conjunto compacto
K ∈ K(X).
4.3 Teorema de la Tangencia Conica 62
Ejemplo 4.3.1.
Usando el corolario 4.3.1 y la proposicion 4.3.1 se puede afirmar que:
(i) Las superficies son conjuntos Hk-rectificable.
(ii) El Grafo de una curva regular es Hk-rectificable.
(iii) El conjunto de puntos que describen una trayectoria fractal (Como en la figura 2.5)
es un conjunto Hk-rectificable.
Para finalizar se enuncia a continuacion el siguiente teorema, el cual sera utilizado en
el siguiente capıtulo. La demostracion de dicho teorema esta mas alla de los objetivos de
la presente tesis, por esa razon y para no descuidar dicho objetivo, se dejara referido al
lector.
Teorema 4.3.1. Si E es un subconjunto Hk-medible y (Hk, k)-rectificable de Rn, entonces,
Θk(E,Hk, e) = 1, ∀e ∈ E,Hk − c.s.
y Tank(E, e) es un subespacio vectorial de dimension k de Rn.
Ademas, si f : E −→ Rm es Lipschitz, entonces f tiene en todo punto e ∈ E, Hk − c.s., un
k-diferencial aproximado
apkD f (e) : Tank(E, e) −→ Rm.
La demostracion esta hecha en [5], Teorema 3.2.19.

CAPITULO 5
Fibrados Aleatorios
De manera similar a la formulacion de procesos puntuales se formulan procesos de
objetos mas complejos, que en este trabajo sera limitado a conjuntos de lıneas localmente
suaves en un espacio X metrico segundo numerable y localmente euclıdeo. Estas lıneas,
por el Teorema de la Tangencia Conica tienen recta tangente en casi todos sus puntos y por
tanto se puede hablar de un fibrado ξ como en el capıtulo 1, donde el espacio Base sera el
conjunto de lıneas aleatorias. Evidentemente para cada ω ∈ Ω se tiene un conjunto de
lıneas enX y de este modo se genera un espacio fibrado para dicho conjunto. Ası se tiene
de esta manera un fibrado aleatorio. Para fines practicos se toma X = Rn y finalmente se
muestran ejemplos particulares de fibrados aleatorios en R2.
5.1. Procesos de Partıculas
Los procesos puntuales en Rn ahora se van a generalizar a procesos de ciertos ele-
mentos geometricos como “trozos” de curvas y superficies de area finita, cuerpos con-
vexos, etc. Estos conjuntos son compactos de Rn los cuales seran llamados “partıculas”
de P(Rn). Es decir, en general, son llamadas “partıculas” a los subconjuntos compactos
no vacıos de Rn.
Sea K′ el espacio de todos los subconjuntos compactos no vacıos de Rn y
dH : K′ ×K′ −→ [0, ∞),
una funcion definida como
dH(K1, K2) = max
supx∈K1
dist(x, K2), supy∈K2
dist(y, K1)
,
63

5.1 Procesos de Partıculas 64
donde dist(x, K) = infz∈K ‖x − z‖ es la distancia de un punto x ∈ Rn al conjunto K ⊂ Rn.
Esta funcion dH es una metrica en K′, llamada la metrica de Hausdorff.
Con esta metrica, dH, se enuncia la siguiente proposicion.
Proposicion 5.1.1. (K′, dH) es un espacio Polaco localmente compacto tal que cada conjunto
acotado es compacto.
Ver [2], seccion 2.8.
Notese que bajo un proceso de partıculas se tiene comprendido un proceso puntual Φ
en K′. Su medida de intensidad
Λ = EΦ,
es una medida de Borel en K′ (una medida en B(K′)). Se asume que esta medida es finita
en el sentido,
Λ(KB) < ∞ , ∀B ∈ K′, (5.1)
donde KB = K ∈ K′ : K ∩ B 6= 0.
Figura 5.1: Condicion 5.1 para un Proceso Puntual en K′.
Notacion 1. A veces, por comodidad, se escribira “K ∈ Φ” en vez de “Φ(K) > 0”.
Definicion 5.1.1. Sea Φ un proceso puntual en K′. Se define el conjunto union del
proceso Φ al conjunto
Ξ =⋃
K∈Φ
K. (5.2)
5.1 Procesos de Partıculas 65
Observe que K ∈ Φ significa que K es una partıcula atomica o punto atomico de Φ en
K′.
La condicion (5.1) asegura que esta union (5.2) es localmente finita. Por lo tanto, Ξ
es cerrado y verifica necesariamente propiedades de medibilidad, obteniendose ası el
siguiente
Teorema 5.1.1. El conjunto union de un proceso puntual Φ en K′ que satisface (5.1) es un
conjunto cerrado aleatorio.
Vease [2], Teorema 2.39 seccion 2.8.
En dos siguientes ejemplos se ilustra como un proceso de partıculas (en este caso un
proceso de circunferencias) en R2 puede ser visto como un proceso puntual en el mismo
espacio R2 o en R3.
Ejemplo 5.1.1. un proceso de circunferencias aleatorias
S = Sn(Cn, Rn)∞n=1 ⊆ R2,
donde
Cn =n
∑i=0
Xi
es el centro de la circunferencia Sn y Xnn∈N es una cadena de Markov con espacio de
estados E = ±(1, 0),±(0, 1). Ademas, Rn es el radio de la circunferencia Sn donde
Rn∞n=1 es un proceso puntual uniforme en [0, 2].
En este caso se tiene una especie de “caminata aleatoria de circunferencias”, donde
los centros de las circunferencias es una caminata aleatoria Markovniana con pasos
aleatorios: Norte, Sur, Este y Oeste, y radio uniforme [0, 2], como se muestra en la figura
5.2.
Para simplificar el proceso, para cada K ∈ K′ sea C(K) ∈ Rn la referencia puntual de
un conjunto compacto K. Se puede elegir, por ejemplo, C(K) como el punto en K cuya
distancia es mınima con el orıgen; de hecho, la funcion C : K′ −→ Rn puede ser elegida
arbitrariamente con las propiedades de medibilidad y tal que
C(K + z) = C(K) + z, K ∈ K′, z ∈ Rn.
Ejemplo 5.1.2. Siguiendo con el proceso del ejemplo 5.1.1. Eligiendo la referencia puntual
C : K′ −→ R2

5.1 Procesos de Partıculas 66
−10 −8 −6 −4 −2 0 2−2
−1
0
1
2
3
4
5
6
7
8
X
Y
Proceso de Circunferencias con centro Markov y radio con distribución uniformeme en [0,2]
Figura 5.2: ” Caminata Aleatoria de Circunferencias” enR2
como
C(Sn) = Cn, (5.3)
se tiene una caminata aleatoria Markovniana con espacio de estados para los pasos
E = ±(1, 0),±(0, 1), como se ilustra en la figura 5.3.
La desventaja de la referencia puntual anterior es que no describe el numero total de
partıculas(circunferencias) en la region mostrada y menos aun el numero de partıculas
por punto de referencia. Para resolver este problema se toma en cuenta tanto el centro
como el radio para cada circunferencia, es decir, una referencia puntual
C : K′ −→ R3
definida como
C(Sn) = (Cn, Rn),
que es evidentemente a una biyeccion entre el conjunto de todas las partıculas descritas
por Sn y Z2 × [0, 2], como se ilustra en la figura 5.4.
Vease figura 5.5, donde se considera la evolucion en el tiempo con la poligonal. Notese
que esta referencia da un modelo de como puede observarse que un proceso de partıculas,
en este caso circunferencias aleatorias, en R2 es un proceso puntual en Z2 × [0, 2] que
puede hacer semejanza a un proceso puntual en el espacio K′(R2).

5.2 Procesos Fibrados y Sistemas de superficies 67
−8 −7 −6 −5 −4 −3 −2 −1 0 1−1
0
1
2
3
4
5
6
7
X
Proceso Markov vs. Radio con distribución uniformeme en [0,2]
Y
Figura 5.3: Proceso Aleatorio descrito por la referencia puntual 5.3.
5.2. Procesos Fibrados y Sistemas de superficies
En esta seccion se considera un conjunto cerrado aleatorio k-dimensional Ξ en Rn,
donde k < n (generalmente k = 1 o k = n − 1).
Para formalizar el sentido de un conjunto cerrado aleatorio k-dimensional, se usa el
concepto general debido a Zahle [12] que introdujo los conjuntos Hk-aleatorio como los
conjuntos cerrados aleatorios en Rn el cual son Hk-rectificables. Es mostrado en [12] que
el espacio
F k =
F ∈ F (Rn) : F es Hk-rectificable
es un subsistema B(F (Rn))-medible de F (Rn).
Un conjunto Hk- aleatorio Ξ es a menudo construido como el conjunto union de
un proceso de “partıculas” donde las partıculas son otra vez conjuntos cerrados Hk-
rectificables. Siguiendo [12] y [2], se define un Hk-proceso como un proceso puntual
Φ en el espacio de estados F k(de conjuntos cerrados Hk-rectificables) con la σ-algebra
inducida por la σ-algebra de Borel B(F (Rn)) en el espacio de conjuntos cerrados F (Rn).
Este enfoque es ligeramente mas general que en la seccion anterior donde solo las
partıculas compactas son permitidas. Analogamente a la condicion (5.1) se tiene que
asumir que solo un numero finito de partıculas tocan la region acotada (esta condicion es
necesaria en el orden que el conjunto union es cerrado). Esta propiedad sera garantizada

5.2 Procesos Fibrados y Sistemas de superficies 68
−10
−5
0
5
−20
24
68
0
0.2
0.4
0.6
0.8
1R
adio
Proceso de Circunferencias con centro Markov y radio con distribución uniformeme en [0,2]
YX
Figura 5.4: Referencia Puntual C.
para casi todas las realizaciones por la hipotesisE (card K ∈ Φ : K ∩ W 6= ∅) < ∞
para cualquier conjunto acotado W ∈ B(Rn).
Entonces, sin ninguna dificultad se tiene que el conjunto union
Ξ =⋃
K∈Φ
K
es un conjunto Hk-aleatorio.
Con un conjunto Hk aleatorio Ξ se puede siempre considerar la medida aleatoria Ψ
inducida en Rn
Ψ(ω) = Hk∣∣∣ Ξ(ω)(·) = Hk(Ξ(ω) ∩ ·)
la restriccion de la medida de Hausdorff k-dimensional a Ξ.
Por el Teorema 4.3.1, para un conjunto Hk-aleatorio Ξ, el subespacio tangente k-
dimensional Tank(Ξ, x) existe para todo x ∈ Ξ, Hk − c.s. Para dimensiones particulares,
se pueden definir los siguientes terminos.
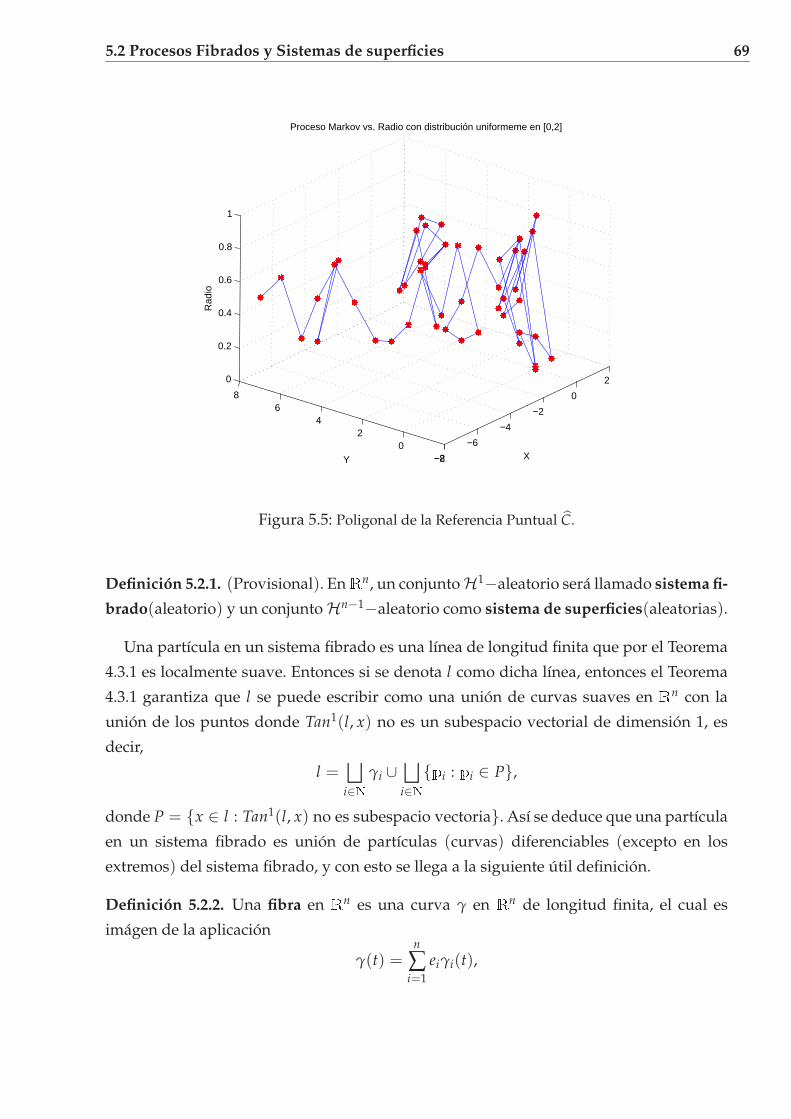
5.2 Procesos Fibrados y Sistemas de superficies 69
−8
−6
−4
−2
0
2
−20
24
68
0
0.2
0.4
0.6
0.8
1
X
Proceso Markov vs. Radio con distribución uniformeme en [0,2]
Y
Rad
io
Figura 5.5: Poligonal de la Referencia Puntual C.
Definicion 5.2.1. (Provisional). EnRn, un conjunto H1−aleatorio sera llamado sistema fi-
brado(aleatorio) y un conjunto Hn−1−aleatorio como sistema de superficies(aleatorias).
Una partıcula en un sistema fibrado es una lınea de longitud finita que por el Teorema
4.3.1 es localmente suave. Entonces si se denota l como dicha lınea, entonces el Teorema
4.3.1 garantiza que l se puede escribir como una union de curvas suaves en Rn con la
union de los puntos donde Tan1(l, x) no es un subespacio vectorial de dimension 1, es
decir,
l =⊔
i∈Nγi ∪⊔
i∈Npi : pi ∈ P,
donde P = x ∈ l : Tan1(l, x) no es subespacio vectoria. Ası se deduce que una partıcula
en un sistema fibrado es union de partıculas (curvas) diferenciables (excepto en los
extremos) del sistema fibrado, y con esto se llega a la siguiente util definicion.
Definicion 5.2.2. Una fibra en Rn es una curva γ en Rn de longitud finita, el cual es
imagen de la aplicacion
γ(t) =n
∑i=1
eiγi(t),

5.2 Procesos Fibrados y Sistemas de superficies 70
donde eii=1,··· ,n es la base canonica en Rn, tal que:
(i) γ : [0, 1] −→ Rn es continuamente diferenciable,
(ii) γ′(t) 6=~0, para todo t ∈ (0, 1).
Cuando una curva cumple (i) y (ii) se dice que la curva es suficientemente suave.
Observacion 5.2.1. Notese que la condicion (ii) de la definicion 5.2.2 garantiza que la
fibra no se intersecte con ella misma (a menos que sea en sus extremos). Una curva
continuamente diferenciable α : [0, 1] −→ Rn, que se intersecta con ella misma pero
no en sus extremos se puede escribir como la union de fibras. Por ejemplo, sea una curva
tal que esta se intersecta con ella misma solo una vez, de tal manera que no sea por sus
extremos, entonces esta es union de tres fibras como se muestra en la figura 5.6.
Figura 5.6: Descomposicion de una curva cualquiera en fibras.
Definicion 5.2.3. Sea γ una fibra en Rn. Se define la medida de longitud de γ por region
boreliana B a la medida
lγ : B(Rn) −→ [0, ∞),

5.2 Procesos Fibrados y Sistemas de superficies 71
tal que,
lγ(B) = H1(γ ∩ B) =∫ 1
01B(γ(t))‖γ′(t)‖dt,
para cualquier boreliano B ⊂ Rn.
Observe que la medida lγ depende solo de la curva γ([0, 1]) y no de la representacion
precisa de γ (como conjunto). La definicion de sistema fibrado es una simple extension
de la definicion de fibra.
Definicion 5.2.4. Un sistema fibrado Ξ es un conjunto cerrado (aleatorio) de Rn el cual
puede ser representado como una union numerable de fibras γi,
Ξ =⋃
γi∈Φ
γi, (5.1)
con la propiedad de que cualquier conjunto compacto es intersectado por solo un numero
finito de fibras (condicion (5.1) de la seccion 5.1), y tal que fibras distintas solo se
intersectan a lo sumo en sus extremos, es decir,
γi((0, 1)) ∩ γj((0, 1)) = ∅, si i 6= j. (5.2)
La medida aleatoria de longitud correspondiente al sistema fibrado Ξ es entonces
definida en terminos de las medidas lγipor
Ψ(B) = ∑γi∈Φ
lγi(B),
para un conjunto de Borel B ⊂ Rn.
Observacion 5.2.2. Notese que la condicion (5.2), de esta seccion, siempre esta garanti-
zada segun la observacion (5.2.1). Ademas, la representacion de Ξ como una union de
fibras (5.1) no es unica.
Es claro que un punto de interseccion de fibras no puede ser un punto de acumulacion
del sistema fibrado, y esto viene nuevamente dado por la condicion de que el sistema
fibrado es localmente finito.
Definicion 5.2.5. Un proceso fibrado Φ es una variable aleatoria (funcion medible),
Φ : (Ω,A,P) −→ (F 1,B(F ) ∩ F 1),
donde F 1 es la familia de todos los sistemas fibrados en Rn.

5.3 Modelos Geometricos 72
La distribucion del proceso fibrado es la medidaPΦ = P Φ−1,
generada en (F 1,B(F ) ∩ F 1) por Φ.
La medida de intensidad, Λ, de un proceso fibrado esta dada por
Λ(B) = E(Ψ(B)) = E(
∑γ∈Φ
H1(γ ∩ B)
),
para un conjunto de Borel B ⊂ Rn.
5.3. Modelos Geometricos
A continuacion se presenta una serie de sistemas fibrados sencillos ilustrando un
evento y finalizando con la construccion del fibrado aleatorio de algunos de estos.
5.3.1. Procesos de lıneas (por el orıgen) finitas en el plano
Una lınea direccionada es un segmento de recta de longitud finita con alguna direccion
en [0, 2π). Un proceso de lıneas direccionadas, es tal que, cada lınea tiene una direccion
azarosa α ∈ [0, 2π) y una longitud tambien al azar x ∈ R+. El proceso puede ser descrito
por el conjunto aleatorio,
ΞL =⋃
n∈Nγ(αn,xn).
Note que a cada lınea (fibra) le corresponde un punto z ∈ S1 ×R+. Es decir, se tiene
una funcion inyectiva,
F : ΞL −→ S1 ×R+
γ(αn,xn) −→ (cos(αn), sen(αn), xn).
Por tanto, un evento del proceso de lıneas direccionadas en el plano es un evento
del proceso puntual inducido por F en S1 × R+. Esto tambien puede ser descrito por
el conjunto de puntos generado por un proceso de rectas aleatorias en R3, por el orıgen,
que intersectan al semicilindro S1 ×R+.
Observe que enR2 el grafo de las lıneas aleatorias por el orıgen con la misma direccion
no se pueden distinguir, solo se podra distinguir la lınea de mayor longitud, mientras que
en S1 ×R+ si se puede notar tal diferencia. Esta es una de las ventajas de ver el proceso
de lıneas direccionadas como un proceso puntual en S1 ×R+.

5.3 Modelos Geometricos 73
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
X
Y
Proceso de Líneas (por el orígen) en el plano.
Figura 5.7: Procesos de lıneas (por el orıgen) finitas en el plano con longitud uniforme en [0, 2] y
angulo uniforme en [0, 2π].
5.3.2. Proceso de lıneas finitas en el plano
Sea ΞP un proceso puntual en R2, es decir,
ΞP =⋃
n∈Nxn.
Un proceso de lıneas en R2 es un proceso,
Ξ =⋃
n∈Nγn + xn,
donde γnn∈N es un proceso como el descrito en la subseccion 5.3.1.
Ejemplo 5.3.1. El siguiente es un evento de un proceso de lıneas finitas en R2, donde
ΞP = xnn∈Nes una caminata aleatoria con pasos markovnianos en E = ±(1, 0),±(0, 1) y
ΞL = γnn∈Ncomo en la subsection 5.3.1.

5.3 Modelos Geometricos 74
−1−0.5
00.5
1 −1
−0.5
0
0.5
1
0
0.5
1
Rad
io
Proceso de Líneas (por el orígen) vista como un proceso puntual en el Semicilindro
X
Y
Figura 5.8: Procesos descrito en la Figura en el cilindro.
5.3.3. Fibrado de un Sistema Fibrado en R2
Sea Ξ =⋃
n∈Nγn un sistema fibrado (orientado positivamente) en R2. Por
definicion, este es un conjunto H1−aleatorio. Entonces Ξ es un conjunto H1−medible y
H1−rectificable, por el Teorema 4.3.1, Tan(Ξ, x) es un subespacio vectorial de dimension
1, ∀x ∈ Ξ, H1 − c.s. Dado ω ∈ Ω, sea U(ω) un abierto en R2 tal que
H1(Ξ(w) ∩ U(ω)) > 0.
Ası se induce en Ξ una topologıa, la topologıa relativa en Ξ,
TΞ = Ξ ∩ U : U ∈ TR2.
Entonces para todo x ∈ Ξ ∩ U : H1(Ξ ∩ U) > 0, H1 − c.s, existe una recta tangente:
ln,(x)(t) = γ′n(x)t + x,
para algun γn ∈ Ξ.
Notese que,
Ξ′ =⋃
n∈Nln,(x) : x ∈ Ξ,

5.3 Modelos Geometricos 75
−14 −12 −10 −8 −6 −4 −2 0 2−6
−5
−4
−3
−2
−1
0
1
2
3
X
Y
Proceso de Líneas en el plano.
Figura 5.9: Proceso de Lıneas del ejemplo 5.3.1.
es un sistema fibrado en R2, (mas aun, es un sistema de lıneas direccionadas en R2),
donde estas lıneas azarosas estan determinadas por una direccion en [0, 2π) y un punto
de apoyo x ∈ Ξ. Siguiendo 1.3.1 del capıtulo 1 se tiene que el espacio fibrado tangente a
U ∩ Ξ es
Tan(U ∩ Ξ) =⊔p : p ∈ U ∩ Ξ, H1(U ∩ Ξ) > 0 ×R,
donde la fibra es F = R, base B = U ∩ Ξ y proyeccion
π : Tan(Ξ ∩ U) −→ Ξ ∩ U
π(x, t) = x,
para todo punto x ∈ U ∩ Ξ, H1 − c.s. En efecto, sea (x, t) ∈ Tan(Ξ ∩ U), basta elegir
Ξ ∩ U ∈ TΞ que contiene a x y el homeomorfısmo,
α : (Ξ ∩ U) ×R −→ π−1(Ξ ∩ U),
definido como:
α(x, t) = (x, mt),

5.3 Modelos Geometricos 76
donde m = yn(t)xn(t)
, para algun γn = (xn, yn) ∈ Ξ ∩ U, ∀x ∈ Ξ ∩ U, H1 − c.s.
Sea Γ = Ξ∩Unn∈N un cubrimiento abierto de Ξ. Entonces por el Teorema 1.2.1 existe
un fibrado con espacio fibrado tangente
Tan(Ξ) =
⋃n∈N(Ξ ∩ Un) ×R
∼=
⊔x∈Ξ
Tan(Ξ,x) : Tan(Ξ ∩ U) es un subespacio lineal de R2,
con fibra F = R y base B = Ξ.
Observacion 5.3.1. Para cada ω ∈ Ω, se tiene un conjunto Ξ(ω) de fibras (un evento de
un proceso fibrado)y un fibrado ξ = ξ(ω) = (Tan(Ξ(ω)), π, Ξ(ω),R). Por esta razon
se dice que el fibrado ξ es aleatorio. La fibra sigue siento F = R puesto que es siempre
homeomorfa a cualquier recta tangente de cualquier fibra aleatoria γn(ω), con ω ∈ Ω.
5.3.4. Fibrado de Procesos Puntuales
En un proceso puntual, los eventos pueden ser descritos por sus trayectorias
poligonales. Es claro que estas trayectorias poligonales son fibras (lıneas de longitud
finita), por tanto se puede describir un proceso puntual como un proceso o sistema
fibrado Ξ. Vease figura 5.10.
Figura 5.10: Proceso puntual visto como un proceso fibrado.
Puesto que los procesos de lıneas son procesos fibrados se tiene, como se ve en la
subseccion anterior, la existencia de un fibrado
Tan(Ξ) =⊔
n∈NTan(Ξ,x) : x ∈ xn−1xn − xn−1, xn,

5.3 Modelos Geometricos 77
donde xy denota el segmento de lınea de x a y.
La idea es construir un modelo que resuelva el problema en los puntos x, donde
Tan(Ξ,x) no es lineal. El modelo consiste en asignar a cada punto xn la recta tangente
aproximada
Tan(Ξ, xn) = x : x = (xn+1 − xn)t + xnt∈R.
Ejemplo 5.3.2. Fibrado aleatorio de una caminata aleatoria en Z2 y pasos Markovnianos
E = ±(0, 1),±(1, 0).
Sea X = Xnn≥0 una cadena de Markov con espacio de estados E = ±(0, 1),±(1, 0).
Se define a partir de esta cadena una caminata aleatoria
Yn =n
∑k=0
Xk.
Ası se induce el siguiente sistema fibrado
Ξ =∞⋃
n=1
γn,
donde γn(t) = (Yn − Yn−1)t + Yn−1 = Xnt + Yn−1, con t ∈ [0, 1]. Ası el cono tangente en
Yn−1 es
Tan(Ξ, Yn−1) = Xntt≥0,
donde Xn ∈ E . Es decir, dado ω ∈ Ω hay una trayectoria de la caminata aleatoria, donde
cada punto Yn(ω) ∈ Z2 puede tener asociado solo una semirecta con una direccion en E .
Obteniendose un sistema fibrado tangente,
Ξ′ =∞⋃
n=1
Tan(Ξ, Yn−1),
donde
Tan(Ξ, Yn−1) = Xntt≥0 y Xn ∈ E .
El modelo es simplemente cambiar la sutileza de t ≥ 0 por t ∈ R para hacerlo un
subespacio lineal de R2.
Sea U un abierto de R2. Si la caminata aleatoria es C = Ynn∈N entonces el fibrado
aleatorio de C ∩ U es
Tan(C ∩ U) =⊔
Yn∈C∩U
Tan∗(C ∩ U, Yn),
donde Tan∗(C ∩ U) = Xntt∈R, con base C ∩ U y fibra R.

5.3 Modelos Geometricos 78
Sea Γ = Un ∩ Cn∈N un cubrimiento abierto de C. Por el Teorema 1.2.1 el fibrado
tangente para C es
Tan(C) =
⊔n∈N C ∩ Un ×R
∼=
⊔
n∈N Tan∗(C, Yn),
con fibra F = R y base B = C.
Observacion 5.3.2. Los eventos o trayectorias de la caminata aleatoria en Z pueden ser
descritas como la proyeccion en Z2 de la interseccion de Z2 ×R ⊂ R3 con un sistema de
superficies en R3.
Ademas, notese que un sistema de fibrado enR2 puede ser descrito como la proyeccion
en R2 de la interseccion de un sistema de superficies en R3 con un sistema de planos
aleatorios, es decir, un evento de un sistema fibrado en R2 puede ser interpretado como
la proyeccion en R2 del corte plano de un sistema de superficies.
BIBLIOGRAFIA
[1] BADDELEY, A. et al. Stochastic Geometry. Lectures given at the C.I.M.E., summer school
held in Martina Franca, Italy, September 13-18, 2004. Lecture Notes in Mathematics.
Vol. 1892. Springer-Verlag.(2007).
[2] BENES, V. & RATAJ, J. Stochastic Geometry: Selected Topics.Kluwer Academic Publish-
ers. Springer Science. (2004).
[3] BETZ, C. Introduccion a la Teoria de la Medida e Integracion, Caracas. (19)
[4] DUDLEY, R.M. Real Analysis and Probability, Wadsworth & Brooks/Cole, Mathemat-
ics Series. Pacific Grove, California. (1989).
[5] FEDERER, H. Geometric Measure Theory, Springer-Verjag. (1996).
[6] FERRARI, P. & GALVES, A. Construction of Stochastic Processes, Coupling and
Regeneration, XIII Escuela Venezolanda de Matematicas, Asociacion Matematica
Venezolana, Universidad de los Andes, Facultad de Ciencias, Merida. (2000).
[7] GUARDIA, T. Geometrıa Diferencial, Universidad Central de Venezuela, Facultad de
Ciencias, Escuela de Matematicas, Caracas. (2007).
[8] IRIBARREN, I. Introduccion a la Teorıa de la Medida, Universidad Central de
Venezuela, Consejo de Desarrollo Cientıfico y Humanıstico, Caracas. (2006).
[9] SHARPE, C. Differential Geometry. Graduate Texts in Mathematics Vol. 166. Springer-
Verlag. New York-Heidelberg-Berlın (1996).
[10] STEENROD, N. The topology of fiber bundles. Princeton University Press. Princeton-
New Jersey. (1951).
79
BIBLIOGRAFIA 80
[11] STOYAN, D., KENDALL, W. & MECKE, J. Stochastic Geometry and its Apllications. Sec-
ond Edition. John Wiley & Sons. Chichester-New York-Brisbane-Toronto-Singapore
(1995).
[12] ZAHLE, M. Random processes of Hausdorff rectificable closed sets. Math. Nachrichten,
108:49-72. (1982).
[13] ROYDEN, H.L. Real Analysis Macmillan Publishihg CO., INC. (1968).
[14] DUGUNDJI, J. Topology Allyn and Bacon, INC. Boston-Londres-Sydney-Toronto
(1966).
[15] LIPSCHUTZ, S. Topologıa General McGraw-Hill CO. (1965).


















