Un modelo AR dinámico para el análisis de series de tiempo ...
24
Modelo Árboles de Polya dependientes Análisis Referencias Un modelo AR dinámico para el análisis de series de tiempo múltiples Luis E. Nieto Barajas (conjunto con Fernando Quintana) Departamento de Estadística ITAM IIMAS-UNAM – 15 noviembre 2016 Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 1 / 21
Transcript of Un modelo AR dinámico para el análisis de series de tiempo ...

Modelo Árboles de Polya dependientes Análisis Referencias
Un modelo AR dinámico para el análisis de series detiempo múltiples
Luis E. Nieto Barajas
(conjunto con Fernando Quintana)
Departamento de EstadísticaITAM
IIMAS-UNAM – 15 noviembre 2016
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 1 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Contenido
1 Modelo
2 Árboles de Polya dependientes
3 Análisis
4 Referencias
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 2 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
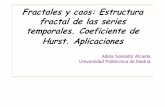
Series ITAEE 2008 desestacionalizado
Time
2004 2006 2008 2010 2012 2014
7080
9010
011
012
0
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 3 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Modelo
La economía de los 32 estados depende de la economía global del país
Las 32 series interactúan entre sí
Necesitamos un modelo que respete la evolución de cada serie pero quecontemple la dependencia país
Sean Xi = {Xti , t ≥ 1}, i = 1, . . . , n. Proponemos
Xti = β1i Xt−1,i + · · ·+ βpi Xt−p,i + εti ,
con Xti = 0 c.p.1 para t < 0, y
εti | Ftiid∼ Ft , para i = 1, . . . , n
{F1,F2, . . .} | θ ∼ dPTq(Πθ, a, ρ, C)
θ ∼ f (θ).
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 4 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Modelo
La economía de los 32 estados depende de la economía global del país
Las 32 series interactúan entre sí
Necesitamos un modelo que respete la evolución de cada serie pero quecontemple la dependencia país
Sean Xi = {Xti , t ≥ 1}, i = 1, . . . , n. Proponemos
Xti = β1i Xt−1,i + · · ·+ βpi Xt−p,i + εti ,
con Xti = 0 c.p.1 para t < 0, y
εti | Ftiid∼ Ft , para i = 1, . . . , n
{F1,F2, . . .} | θ ∼ dPTq(Πθ, a, ρ, C)
θ ∼ f (θ).
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 4 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Árbol de Polya
B
B0 B1
B00 B01 B10 B11
B000 B001 B010 B011 B100 B101 B110 B111
m=0
m=1
m=2
m=3
Y1 = p(B1 | B) = 1−Y0Y0=p(B0 | B)
Y00=P(B00 | B0) Y01=P(B01 | B0) Y10 Y11
Y000 Y001 Y010 Y011 Y100 Y101 Y110 Y111
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 5 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Árbol de Polya
−3 −2 −1 0 1 2 3
0.0
0.2
0.4
0.6
0.8
1.0
y
Dens
ity
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 6 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Árbol de Polya
Formalmente, una medida de probabilidad aleatoria F en (IR,B) tiene unadistribución de árbol de Polya con parámetros (Π,A),
En notación F ∼ PT(Π,A), si existe una sucesión de números no negativosA = {αmj} y una familia de v.a. Y = {Ymj} t.q.
a) Todas las v.a. en Y son indep. ;
b) Para cada (m, j), j = 1, . . . , 2m−1 y m = 1, 2, . . ., Ym,2j−1 ∼ Be(αm,2j−1, αm,2j ) yYm,2j = 1− Ym,2j−1 ; y,
c) Para cada m = 1, 2, . . . y cada j = 1, . . . , 2m ,
F (Bmj ) =m∏
k=1
Ym−k+1,j(m,j)
m−k+1,
donde j(m,j)k−1 = dj(m,j)
k /2e es una fórmula recursiva con valor inicial j(m,j)m = j
Típicamente αm,j = a ρ(m)
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 7 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Árbol de Polya
La aleatoriedad del árbol dependen de Ym+1,2j−1 = P(Bm+1,2j−1 | Bmj )
Definimos dependencia entre varios árboles definiendo una sucesión de variablesdependientes Yt = {Yt,m,j}
¿Cómo ?
A través de un proceso beta
w���
����
�� ?@@@R
HHHHHj
u1 u2 u3 u4 u5
y1 y2 y3 y4 y5?@@R
HHHHHj?@@R
HHHHHj?@@R
HHHHHj?@@R?
yt | ut , ut−1, . . . , ut−qind∼ Be
a +
q∑j=0
ut−j , b +
q∑j=0
(ct−j − ut−j )
,
ut | wind∼ Bin(ct ,w), t = 1, 2, . . .
w ∼ Be(a, b)
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 8 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Árbol de Polya
La aleatoriedad del árbol dependen de Ym+1,2j−1 = P(Bm+1,2j−1 | Bmj )
Definimos dependencia entre varios árboles definiendo una sucesión de variablesdependientes Yt = {Yt,m,j}
¿Cómo ? A través de un proceso beta
w���
����
�� ?@@@R
HHHHHj
u1 u2 u3 u4 u5
y1 y2 y3 y4 y5?@@R
HHHHHj?@@R
HHHHHj?@@R
HHHHHj?@@R?
yt | ut , ut−1, . . . , ut−qind∼ Be
a +
q∑j=0
ut−j , b +
q∑j=0
(ct−j − ut−j )
,
ut | wind∼ Bin(ct ,w), t = 1, 2, . . .
w ∼ Be(a, b)
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 8 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
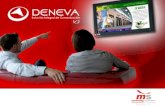
Proceso beta de orden q (BePq)
1980 1990 2000 2010 2020
0.00.1
0.20.3
0.4
Year
●
●
●
●
●
●
●
●
●
● ●●
● ●
●●
●● ●
●● ● ● ●
●
●
●
●●
●●
BePBDM
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 9 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Árboles de Polya dependientes
F = {F1,F2, . . .} son árboles de Polya dependientes t.q.
F ∼ dPTq(Π, a, ρ, C),
con C = {ct,m,j}, a > 0 y ρ(m) = mδ , δ > 1 para garantizar continuidad.Usualmente δ = 2 pero sugerimos δ = 1.1
Propiedades :
Corr{Ft (Bmj ),Ft+s(Bmj )} =
∏mk=1
{ψ
t,s,m−k+1,j(m,j)m−k+1
σ2m−k+1 + 1/4
}− (1/4)m
∏mk=1
{σ2
m−k+1 + 1/4}− (1/4)m
,
con
ψt,s,k,j(m,j)
k=
2aρ(k)
(∑q−sl=0 c
t−l,k,j(m,j)k
)+
(∑ql=0 c
t−l,k,j(m,j)k
)(∑ql=0 c
t+s−l,k,j(m,j)k
)(
2aρ(k) +∑q
l=0 ct−l,k,j(m,j)
k
)(2aρ(k) +
∑ql=0 c
t+s−l,k,j(m,j)k
) ,
σ2k =
1
4{2aρ(k) + 1}.
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 10 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Correlación en dPT
2 4 6 8 10 12 14
0.0
0.2
0.4
0.6
0.8
1.0
Lag
Cor
r
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 11 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Mezclas en árboles de Polya dependientes
Es bien conocido que los PT tienen discontinuidades en los bordes de lasparticiones
Generalmente Π = {Bmj} se define con los cuantiles de F0
Es posible disminuir el efecto de la partición si se mezcla con respecto a unparámetro θ, i.e. Πθ = {Bθmj} definido por F0(· | θ) con θ ∼ f (θ) lo que implica
F ∼∫
dPTq(Πθ, a, ρ, C)f (θ)dθ
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 12 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Análisis
Recordemos nuestro modelo
Xti = β1i Xt−1,i + · · ·+ βpi Xt−p,i + εti ,
con Xti = 0 c.p.1 para t < 0, y
εti | Ftiid∼ Ft , para i = 1, . . . , n
{F1,F2, . . .} | θ ∼ dPTq(Πθ, a, ρ, C)
θ ∼ f (θ).
Especificaciones :
F0(· | θ) = N(0, θ2)
Fijamos mediana en cero : Tomamos B11 = (−∞, 0] y B12 = (0,∞) conFt (B11) = Ft (B12) = 1/2⇔ Yt,1,1 = Yt,1,2 = 1/2 c.p.1.
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 13 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Inferencia bayesiana
Iniciales
Para C :
ct,m,2j−1 | λm,2j−1ind∼ Po(λm,2j−1), λm,2j−1
iid∼ Ga(bλ1 , bλ2 )
para t = 1, . . . ,T , m = 1, 2, . . . y j = 1, . . . , 2m−1
Para θ :θ ∼ Ga−1/2(bθ1 , b
θ2 )
Para los coeficientes AR β :βki
iid∼ N(0, σ2β),
para k = 1, . . . , p y i = 1, . . . , n
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 14 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Análisis de datos
Sea Yti la observación ITAEE para el estado i en el tiempo t
Quitamos nivel, tendencia y estacionalidades tomando segundas diferencias, i.e.Xt = (Yt − Yt−1)− (Yt−1 − Yt−2), para t = 3, . . . , 46
Gráficas de la autocorrelación parcial de Xti sugiere una dependenciaautorregresiva de orden entre 2 y 4
Especificaciones iniciales : (bλ1 , bλ2 ) = (1, 1) ; (bθ1 , b
θ2 ) = (0.1, 0.1) ; σ2
β = 100
Tomamos un árbol finito con M = 5 niveles, a = 1, y ρ(m) = mδ con δ = 1.1
Los valores (p, q) se determinaron mediante el DIC
qp 0 1 2 3 4 5 61 3020 2720 2552 2676 2671 2644 26822 2606 2139 2136 2015 1947 2086 20463 2664 2438 2295 2264 2324 2290 23944 2566 2409 2340 2237 2228 2190 2383
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 15 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Análisis de datos
Sea Yti la observación ITAEE para el estado i en el tiempo t
Quitamos nivel, tendencia y estacionalidades tomando segundas diferencias, i.e.Xt = (Yt − Yt−1)− (Yt−1 − Yt−2), para t = 3, . . . , 46
Gráficas de la autocorrelación parcial de Xti sugiere una dependenciaautorregresiva de orden entre 2 y 4
Especificaciones iniciales : (bλ1 , bλ2 ) = (1, 1) ; (bθ1 , b
θ2 ) = (0.1, 0.1) ; σ2
β = 100
Tomamos un árbol finito con M = 5 niveles, a = 1, y ρ(m) = mδ con δ = 1.1
Los valores (p, q) se determinaron mediante el DIC
qp 0 1 2 3 4 5 61 3020 2720 2552 2676 2671 2644 26822 2606 2139 2136 2015 1947 2086 20463 2664 2438 2295 2264 2324 2290 23944 2566 2409 2340 2237 2228 2190 2383
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 15 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Segundas diferencias
Time
2004 2006 2008 2010 2012 2014
−20
−10
010
2nd. diff
Den
sity
−20 −10 0 10
0.00
0.05
0.10
0.15
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 16 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
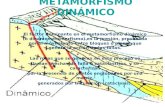
Parámetros ct ,m,j estimados
2004 2006 2008 2010 2012 2014
1.5
2.0
2.5
3.0
3.5
4.0
4.5
Time
c
FIGURE : m = 2 and j = 3 (solid line) ; m = 3 and j = 5 (dashed line) ; and m = 4 and j = 9 (dotted-dashed line)
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 17 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Distribución estimada de los errores0.
000.
050.
100.
150.
200.
25
Den
sity
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 18 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Cuantiles estimados de los errores
2004 2006 2008 2010 2012 2014
−6
−4
−2
02
46
Time
Qua
ntile
s
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 19 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
P(βki > 0 | data)
●
●
● ●
●
●
●
●
●
● ● ● ● ●●
● ● ●
●
●●
●● ● ●
●
●
● ●● ● ●
0 5 10 15 20 25 30
0.00
0.02
0.04
0.06
0.08
i
beta
1
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0 5 10 15 20 25 30
0.00
0.05
0.10
0.15
0.20
i
beta
2
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 20 / 21

Modelo Árboles de Polya dependientes Análisis Referencias
Referencias
1 Jara, A., Nieto-Barajas, L.E. & Quintana, F. (2013). A time series model forresponses on the unit interval. Bayesian Analysis 8, 723–740.
2 Nieto-Barajas, L.E. & Quintana, F.A. (2016). A Bayesian nonparametric dynamicAR model for multiple time series analysis. Journal of Time Series Analysis 37,675–689.
3 Watson, J., Nieto-Barajas, L.E. & Holmes, C. (2016). Characterising variation ofnonparametric random probability measures using the Kullback-Leiblerdivergence. Statistics. To appear.
Luis E. Nieto Barajas AR dinámico BNP IIMAS-UNAM – 15 noviembre 2016 21 / 21