Título Subsistema Rendija y Máscara · unidad de mascaras ubicado por debajo de este (figura 2) y...
52
INSTITUTO DE ASTRONOMÍA UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO Espectrógrafo óptico de mediana y baja dispersión para el Observatorio de San Pedro Mártir Fecha: 20/02/2007 Código: ESOPO-ME-A-RM-1 No. de páginas: 52 Versión: 1 Título Subsistema Rendija y Máscara
Transcript of Título Subsistema Rendija y Máscara · unidad de mascaras ubicado por debajo de este (figura 2) y...

INSTITUTO DE ASTRONOMÍA
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO
Espectrógrafo óptico de mediana y baja dispersión para el Observatorio de San Pedro Mártir
Fecha: 20/02/2007 Código: ESOPO-ME-A-RM-1 No. de páginas: 52 Versión: 1
Título
Subsistema Rendija y Máscara

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 2 DE 52
Control del documento
Preparado por
María Herlinda Pedrayes López
Revisado por
Fernando Quiroz
Jesús González
Gerardo Sierra
Aprobado por
Alejandro Farah
Project Manager
Autorizado por
Rafael Costero
Investigador Principal
Juan Echevarria
Responsable del Proyecto
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 3 DE 52
Registro de cambios (A)
Número Fecha Sección Página Descripción del cambio

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 4 DE 52
Lista de abreviaciones
ESOPO Espectrógrafo óptico de mediana y baja dispersión para el Observatorio de San Pedro Mártir.
PSD Por ser definido.
PSC Por ser confirmado
.
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 5 DE 52
ÍNDICE
1. RESUMEN...................................................................................................................... 8
2. INTRODUCCIÓN.......................................................................................................... 8
3. DEFINICIONES............................................................................................................. 8
3.1 MECANISMO ..................................................................................................................... 8
3.2 PRECISIÓN......................................................................................................................... 8
3.3 REPETIBILIDAD ................................................................................................................. 8
3.4 EXACTITUD:...................................................................................................................... 8
3.5 TOLERANCIA: ................................................................................................................... 8
3.6 RESOLUCIÓN..................................................................................................................... 8
3.7 FALLA DEL SUBSISTEMA................................................................................................... 8
3.8 PLANO FOCAL ................................................................................................................... 9
3.9 CAMINO ÓPTICO................................................................................................................ 9
3.9.1 Camino óptico común .................................................................................................. 9
3.10 APERTURA CLARA............................................................................................................ 9
3.11 ENVOLVENTE ÓPTICA....................................................................................................... 9
3.12 SISTEMAS DE COORDENADAS ........................................................................................... 9
3.12.1 Sistema de coordenadas globales ................................................................................ 9
3.12.2 Superficies de referencia y sistema de coordenadas locales ....................................... 9
4. EL SUBSISTEMA RENDIJA-MASCARILLA........................................................... 9
2.1 CONFIGURACIÓN GENERAL.................................................................................................... 10
5. REQUERIMIENTOS DE DISEÑO............................................................................ 12
5.1 FUNCIONALES ................................................................................................................. 12
5.1.1 Acceso al subsistema con respecto al instrumento .................................................... 12
5.1.2 Estandarización de las componentes comerciales..................................................... 12
5.1.3 Potencia de motores................................................................................................... 12
5.1.4 Disipación de calor.................................................................................................... 12
5.1.5 Manejo del subsistema............................................................................................... 12
5.1.6 El tiempo de vida........................................................................................................ 12
5.1.7 Tiempo medio entre fallas y de reparación................................................................ 12
5.2 FÍSICOS ........................................................................................................................... 12
5.2.1 Dimensiones de la envolvente. ................................................................................... 12
5.2.2 Centro de masa. ......................................................................................................... 13

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 6 DE 52
5.2.3 Peso y momento máximos .......................................................................................... 13
5.2.4 Materiales estructurales ............................................................................................ 13
5.2.5 Condiciones de materiales ......................................................................................... 13
5.2.6 Terminación de las superficies................................................................................... 13
5.2.6.1 Navajas de la rendija ....................................................................................... 13
5.2.6.2 Mascarilla........................................................................................................ 13
5.3 REQUERIMIENTOS DE INTEGRACIÓN .............................................................................. 13
5.3.1 Mecánicos .................................................................................................................. 13
5.3.2 Interfaces.................................................................................................................... 14
5.3.3 Electrónicas ............................................................................................................... 14
5.4 REQUERIMIENTOS AMBIENTALES .................................................................................. 14
5.4.1 Aislamiento Térmico .................................................................................................. 14
6. ESPECIFICACIONES DEL SUBSISTEMA............................................................. 15
6.1 ESPECIFICACIONES RENDIJA: ......................................................................................... 15
6.1.1 Posición y rotación .................................................................................................... 15
6.1.2 Geométricas ............................................................................................................... 15
6.1.2.1 Superficies de referencia................................................................................. 15
6.1.2.2 Planitud ........................................................................................................... 15
6.1.2.3 Paralelismo...................................................................................................... 15
6.1.2.4 Perpendicularidad ........................................................................................... 15
6.1.3 Mecánicas .................................................................................................................. 15
6.2 ESPECIFICACIONES MASCARILLA:.................................................................................. 16
6.2.1 Posición y rotación .................................................................................................... 16
6.2.2 Geométricas ............................................................................................................... 16
6.2.2.1 Superficies de referencia................................................................................. 16
6.2.2.2 Planitud ........................................................................................................... 16
6.2.2.3 Paralelismo...................................................................................................... 16
6.2.3 Mecánicas .................................................................................................................. 16
6.3 DESEMPEÑO (DINÁMICOS) ............................................................................................. 16
6.3.1 Estabilidad con respecto al instrumento.................................................................... 16
6.3.2 Estabilidad del subsistema......................................................................................... 17
7. DISEÑO PRELIMINAR ............................................................................................. 18
7.1.1 Dimensiones de la envolvente. ................................................................................... 19

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 7 DE 52
7.1.2 Centro de masa .......................................................................................................... 19
7.1.3 Peso y momentos máximos......................................................................................... 19
7.2 MECANISMO DE RENDIJA ............................................................................................... 20
7.2.1 Descripción ................................................................................................................ 20
7.2.2 Dimensiones del mecanismo de rendija..................................................................... 22
7.2.3 Centro de masa .......................................................................................................... 23
7.2.4 Peso............................................................................................................................ 23
7.2.5 Material...................................................................................................................... 23
7.3 MECANISMO DE MASCARILLA ....................................................................................... 23
7.3.1 Descripción ................................................................................................................ 23
7.3.2 Dimensiones del mecanismo de mascarilla. .............................................................. 24
7.3.3 Centro de masa: ......................................................................................................... 26
7.3.4 Peso............................................................................................................................ 26
7.3.5 Material...................................................................................................................... 26
7.4 MESA DE POSICIÓN......................................................................................................... 26
7.4.1 Descripción ................................................................................................................ 26
7.4.2 Centro de masa .......................................................................................................... 27
7.4.3 Peso y momento máximos .......................................................................................... 27
7.4.4 Material...................................................................................................................... 27
8. ANALISIS FEA ............................................................................................................ 28
8.1 PARA OBTENER EL MOVIMIENTO DE LA RENDIJA DESEADO ........................................... 28
8.1.1 1er Modelo ................................................................................................................. 28
8.1.2 Segundo Modelo......................................................................................................... 30
8.1.2.1 Gravedad perpendicular al plano de desplazamiento...................................... 30
8.1.2.2 Gravedad paralela al eje X.............................................................................. 33
8.1.2.3 Gravedad a 15 grados con respecto al eje Y .................................................. 34
8.2 PARA OBTENER EL COMPORTAMIENTO DEL ENSAMBLE R-M ANTE LAS
CARGAS GRAVITATORIAS Y TÉRMICAS. .......................................................................... 35
9. PULIDO DE LAS SUPERFICIES ÓPTICAS DE LA RENDIJA ........................... 37
10. CONCLUSIONES........................................................................................................ 38
11. APENDICE 1. PLANOS DE FABRICACIÓN.......................................................... 39
12. APENDICE 2. PARTES COMERCIALES .............................................................. 41
13. REFERENCIAS Y BIBLIOGRAFÍA......................................................................... 52

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 8 DE 52
1. RESUMEN
El objetivo de este documento es concentrar todas las especificaciones y requerimientos de la mecánica para el subsistema Rendija-Mascarilla, así como describir las diferentes configuraciones funcionales de este subsistema, para que las especificaciones ópticas sean satisfechas.
Este documento también incluye el diseño preliminar mecánico del subsistema Rendija-Mascarilla (R-M), así como describe brevemente los análisis realizados para asegurar su funcionamiento. Se hablará del avance que se tiene en el pulido de las superficies reflejantes, y finalmente, se enlistará las piezas comerciales más importantes que se requieren.
2. INTRODUCCIÓN
3. DEFINICIONES
3.1 Mecanismo
Conjunto de piezas que permiten el movimiento de una parte del instrumento.
3.2 Precisión
La escala mínima de medición. Capacidad de un instrumento de dar el mismo resultado en mediciones diferentes realizadas en las mismas condiciones.
3.3 Repetibilidad
Es la capacidad de un mecanismo de regresar a una posición anterior en las mismas condiciones.
3.4 Exactitud:
Capacidad para acercarse a la magnitud real. Máximo error en desplazamiento y/o rotación entre dos puntos.
3.5 Tolerancia:
Se puede definir como el máximo error permitido en la fabricación o ensamble de un elemento, ya sea en sus dimensiones, peso, resistencia o cualquiera de sus propiedades medibles.
3.6 Resolución
Es la unidad más pequeña con que se puede hacer una medición.
3.7 Falla del subsistema
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 9 DE 52
Cualquier evento que impida el correcto funcionamiento del instrumento.
3.8 Plano focal
Corresponde al lugar geométrico donde el telescopio forma la imagen de los objetos celestes.
3.9 Camino óptico
Trayectoria que sigue la luz en el instrumento. ESOPO cuenta con tres caminos ópticos diferenciados: brazo azul, brazo rojo y un camino óptico común a ambos brazos.
3.9.1 Camino óptico común
Es el trayecto que sigue la luz desde el telescopio hasta el divisor de haz del instrumento.
Es el camino óptico desde el divisor de haz hasta el detector optimizado a longitudes de onda por arriba de 450 nanómetros.
3.10 Apertura Clara
Dimensiones del claro necesario en cada componente para dejar pasar la luz; en su superficie de entrada y salida.
3.11 Envolvente Óptica
Queda definido como la apertura clara máxima de cada componente consecutivo y la distancia entre ellas. Se puede describir como el volumen del haz de luz entre dichas componentes.
3.12 Sistemas de coordenadas
3.12.1 Sistema de coordenadas globales
El punto cero de referencia de las coordenadas globales de ESOPO se define como el centro del campo focal del telescopio (centro de la rendija del espectrógrafo).
Las coordenadas positivas del eje Z seguirán el trayecto del camino óptico. El eje X coincidirá con el largo de la rendija. El eje Y será paralelo al ancho de la misma.
3.12.2 Superficies de referencia y sistema de coordenadas locales
El subsistema tendrá una superficie de referencia que será la rendija, y en el centro de esta se localizará el origen de un sistema de coordenadas local que coincidirá con el origen del eje óptico del telescopio. El punto de referencia será la primera superficie óptica que se encuentre el haz de luz en dirección del telescopio al CCD. Los ejes coordenados estarán orientados de acuerdo a la superficie reflejante de la rendija.
4. EL SUBSISTEMA RENDIJA-MASCARILLA

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 10 DE 52
2.1 Configuración general
La configuración del instrumento está establecida por el trayecto del haz de luz. El foco del telescopio se encuentra dentro del instrumento a 270mm de la platina giratoria y es donde se encuentra la rendija. Ver figura 1.El centro de la rendija es el origen del instrumento y se toma como referencia para las distancias a través del haz de luz. Después, siguiendo el haz de luz a 47.65 mm se localiza el subsistema lente de campo que servirá para sellar el resto del instrumento del medio ambiente; de lo que se entiende que el subsistema rendija-mascarilla quedará expuesto, fuera de la parte cerrada del instrumento.
El subsistema completo incluye a la unidad de rendija que estará complementada con una unidad de mascaras ubicado por debajo de este ( figura 2) y una mesa que permite deslizar de manera conjunta a las dos unidades. Ver figura 3.
La distancia mínima entre el subsistema rendija-mascarilla y la lente de campo será de 12.7mm a lo largo del eje óptico.
El subsistema debe permitir observar el campo que ilumina a la rendija para centrar en esta los objetos observados, además de permitir el guiado del telescopio a través de una cámara. Para ello se inclina el subsistema con respecto al plano focal 15 grados.
La unidad de rendija controlará la apertura de la rendija desde un mínimo que permitirá estimar la resolución instrumental del sistema telescopio-espectrógrafo hasta un máximo no menor a 2 segundos de arco. Se podrá observar todo el campo de 10 minutos de arco al desplazar el subsistema de manera manual.
La unidad de máscara permitirá tres posiciones discretas para un patrón de calibración geométrica, un patrón de Daecker y todo el campo de la rendija

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 11 DE 52
Figura 1. Vista lateral de la posición del subsistema con respecto al lente de
campo.Unidades en metros y coordenadas globales
Figura 2. Unidades de la rendija y la mascarilla con las coordenadas locales del
subsistema.
Figura 3. Vista del subsistema dentro del espectrógrafo
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 12 DE 52
5. REQUERIMIENTOS DE DISEÑO
5.1 Funcionales
5.1.1 Acceso al subsistema con respecto al instrumento
Las cubiertas del instrumento podrán retirarse fácilmente para el mantenimiento, la calibración, y sustitución de las componentes del subsistema que lo requieran.
5.1.2 Estandarización de las componentes comerciales
Las componentes del subsistema serán estándares en donde se requiera, de calidad comprobada, se escogerán tomando en cuenta su mantenimiento y tiempo de vida útil.
5.1.3 Potencia de motores.
Los motores empleados en el subsistema deberán tener una potencia con un factor seguridad no menor a 3 en su capacidad de operación. Los motores deberán ser sometidos a un periodo de prueba antes de ser liberado el instrumento.
5.1.4 Disipación de calor.
La disipación de calor cerca del subsistema deberá de ser mínima. Las componentes de mayor disipación (motores) se conectarán térmicamente a las partes externas del instrumento.
5.1.5 Manejo del subsistema
El subsistema de rendija y mascara deberá de ser desplazable y desmontable para ser actualizado. A su vez la mascarilla podrá ser desmontable para ser actualizada.
5.1.6 El tiempo de vida
El subsistema deberá permanecer en servicio por lo menos 10 años que será el tiempo de vida del instrumento.
5.1.7 Tiempo medio entre fallas y de reparación. Fallas menores: Las fallas menores serán aquellas donde es posible perder una noche de observación, y el personal de mantenimiento del OAN lo pueden resolver.
El tiempo medio entre fallas será de 1 cada 90 noches.
El tiempo medio de reparación será 2 horas en la noche ó 4 horas en el día.
Fallas mayores: Las fallas mayores serán aquellas donde es posible perder más de una noche de observación, y se requiere de personal especializado.
El tiempo medio entre fallas será de 1 cada 240 noches.
El tiempo medio de reparación será 1 noche o más.
5.2 Físicos
5.2.1 Dimensiones de la envolvente.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 13 DE 52
Las dimensiones de la envolvente en la que quedará comprendido el subsistema no pasarán de un prisma que tenga una longitud de # m y una altura de # m.
5.2.2 Centro de masa.
El centro de masa tendrá que localizarse lo más cerca posible del foco del telescopio
5.2.3 Peso y momento máximos
El peso del subsistema será a los más 4.00 Kg. El momento que producirá el instrumento al telescopio será a los más 0.0005 Kg.-m. PSC
5.2.4 Materiales estructurales
La elección del material es importante. El material deberá ser tal para cumplir con los requerimientos y especificaciones ópticos.
El material de las componentes de la estructura interna de la rendija serán de aluminio 2024-T4, el de las partes flectoras acero inoxidable 301 templado para resorte y bronce grafitado donde se requiera cojinetes.
El material de las navajas y superficie reflectora será de de Al 6082.
El material de la mascarilla tendrá como condición que pueda ser perforado con laser por lo que su espesor no será mayor a 100 µm.
5.2.5 Condiciones de materiales
Todos los materiales que se usarán en el instrumento serán de la mejor calidad. Los materiales serán de proveedores con calidad comprobada. Todos los materiales que lo requieran tendrán su certificado de análisis de calidad y de inspección bajo las normas que lo rijan.
5.2.6 Terminación de las superficies.
Todas las partes mecánicas del subsistema que estén expuestas al camino óptico tendrán un acabado de baja reflectividad, esto es opacos al intervalo espectral.
5.2.6.1 Navajas de la rendija
La superficie superior de las navajas debe reflejar a 0.5 µm en un 98% como mínimo e la luz que incide en ella.
Los bordes de las navajas tendrán un grosor máximo de 10 µm y tendrán una microrugosidad máxima de 25 nanómetros rms (1µm pico-valle?????).
5.2.6.2 Mascarilla
Los bordes internos de la mascarilla tendrán una microrrugosidad de 25 nanómetros rms.
5.3 Requerimientos de Integración
5.3.1 Mecánicos
El subsistema en sí será autónomo en su funcionamiento.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 14 DE 52
5.3.2 Interfaces
El subsistema tendrá una superficie de referencia para ser integrada a la estructura a través de una interfaz. Esta superficie de referencia será la base de la mesa de movimiento de las dos unidades Requerirá de un apoyo extra por su extremo mas alejado para disminuir las flexiones por su propio peso. Además necesitará de una segunda interfaz pero ya no de precisión ni de referencia para permitir desplazar manualmente al subsistema del campo óptico.
5.3.3 Electrónicas
5.4 Requerimientos Ambientales
• Optimización a T=3˚C y P= 557 mmHg.
• Mínimo intervalo de operación: -10˚C a 16˚C en temperatura y 548 a 567 mmHg en presión.
• Mínimo intervalo de supervivencia: de -16˚C a 34˚C en temperatura, y de 500 a 760 mmHg en presión.
La referencia térmica será a 3˚C para todas las dimensiones y tolerancias, al menos que se especifique otra. En la tabla 6.1-1 se muestran de manera esquemática algunos valores de referencia ambientales.
Condiciones Nominales
Limite de operación Limite de supervivencia
Variaciones térmicas en 30 minutos
0.2° 0.650° 4°
Variaciones térmicas en una hora
0.4° 1.2°
10°
Variaciones térmicas en 2 horas
0.8° 2.6° 20°
Humedad relativa 47% 5%-90% 4%-100%
Presión atmosférica 557 mmHg 548 a 567 mmHg 500 a 760 mmHg
Vientos 5.3 m/s 16 m/s 18 m/s
Tabla 6.1-1 Condiciones de operación y límites de supervivencia del instrumento.
5.4.1 Aislamiento Térmico

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 15 DE 52
Por su posición con respecto al resto del instrumento, el subsistema estará expuesto a la temperatura ambiente
6. ESPECIFICACIONES DEL SUBSISTEMA
6.1 Especificaciones Rendija:
Provienen del presupuesto de error estático (diseño, fabricación e integración) + mas un factor de seguridad.
6.1.1 Posición y rotación
- Ángulo de inclinación de la superficie óptica de referencia de la rendija con respecto al plano focal del telescopio: 15° ± 0.5º
- Tolerancia de posición del centro de la apertura de la rendija a lo ancho ± 10 µm.
- Tolerancia de posición de la apertura de la rendija a lo largo ± 1 mm.
- Tolerancia de posición de la apertura de la rendija con respecto al plano focal del telescopio ±38 µm.
6.1.2 Geométricas
- Campo libre ≥ 46.03 mm (10 minutos de arco) al ser removida la rendija.
- Longitud mínima del las navajas: 60 mm.
- Tolerancias de longitud: -0.0 mm, +4 mm.
6.1.2.1 Superficies de referencia
− Para la unidad de rendija la superficie de referencia será la formada por las dos navajas.
6.1.2.2 Planitud
− La superficie reflejante de cada navaja tendrá una planicidad de λ/2.
6.1.2.3 Paralelismo
− El pistón entre superficies reflectoras de navajas será 12 µm
− Entre los filos de las navajas tendrá un error medio de 10% de la separación a 0.8” esto es 10 µm en 60 mm).
6.1.2.4 Perpendicularidad
− El tilt entre superficies reflectoras será de 34 segundos de arco.
6.1.3 Mecánicas

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 16 DE 52
- Tolerancias de apertura de rendija
o ∆Wy 5 µm para el azul
10 µm para el rojo
o ∆α[°] 0.010 ° para el azul
0.010 ° para el rojo
- Apertura mínima de protección para evitar el impacto entre las navajas: ≤ 0.8” (61 µm).
- Apretura máxima del mecanismo: 2.0” (153 µm)
- Resolución de apertura de las navajas: ±2 µm
- Repetitibilidad en la apertura de las navajas: ± 5 µm
6.2 Especificaciones Mascarilla:
6.2.1 Posición y rotación
- Ángulo de inclinación e la superficie óptica de referencia de la mascarilla con respecto al plano focal del telescopio: 15° ± 0.5º
- Tolerancia de posición del centro de la primera y tercera configuración de la mascarilla con respecto al centro de la apertura de la rendija ± 100 µm a lo largo.
- Tolerancia de posición a lo largo del eje Z local de la mascarilla con respecto a la rendija ± 100 µm.
6.2.2 Geométricas
6.2.2.1 Superficies de referencia
Para la unidad de mascarilla la superficie de referencia será la primera cara que atraviesa el haz de luz del telescopio.
6.2.2.2 Planitud
6.2.2.3 Paralelismo
- Las ranuras de la mascarilla presentarán un paralelismo entre bordes de 10% de su dimensión mínima paralela a la rendija (70 µm).
6.2.3 Mecánicas
- Repetibilidad de la posición de la mascarilla con respecto a la rendija ±100 µm
6.3 Desempeño (Dinámicos)
Operation Error Budget
6.3.1 Estabilidad con respecto al instrumento
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 17 DE 52
La posición del subsistema con respecto al instrumento estará supeditado a la posición de las navajas con respecto al foco del telescopio y su desviación no será mayor a 5micras en cualquier dirección durante una exposición en cualquier posición del instrumento, dentro de 60º de ángulo cenital.
6.3.2 Estabilidad del subsistema
La repetibilidad y estabilidad de las componentes del subsistema serán tales que:
a. Durante una exposición de 0.5 horas la estabilidad y calidad de imagen no deberá degradarse más de 2.5%.
a. Slit motion along width (mech plus thermal) 0.0001 pixeles?
b. Slit Width variation (mech plus thermal) 0.0018
b. Al cambiar y volver a una configuración, la repetibilidad se mantendrá dentro de un 5% (meta 3%). (0.45 pixel) Si píxel 15 µm esto es 6 µm degradando la resolución.
c. Calibraciones relativas al principio y final de la noche (en resolución y dispersión espectral, escala espacial y respuesta a lo largo de la rendija y de longitud de onda), deberán ser aplicables a los datos de esa noche (en su forma relativa, no así absoluta o punto cero) con una confiabilidad mejor al 10% (meta 5%) dados los cambios por temperatura (±6˚C), flexiones u otras derivas.
a. Variación de resolución a lo largo de la rendija. Presupuesto total (10% de degradación)
b. Slit Jaws parallelism and width inhomogeneities (6.5%) 0.0650 pixeles.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 18 DE 52
7. DISEÑO PRELIMINAR
Figura 4 . Vista frontal del subsistema. Ejes coordenados globales. Unidades en mm.
Figura 5. Vista lateral del subsistema. Ejes coordenados globales. Unidades en mm.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 19 DE 52
7.1.1 Dimensiones de la envolvente.
Las dimensiones de la envolvente en la que quedará comprendido el R-M no pasarán de un prisma que tenga una longitud de 294 mm (eje Y), un ancho de 418 mm (eje X) y una altura de 106 mm (eje Y) en las coordenadas globales. Ver Figuras 4,5
El espesor del mecanismo de rendija en la zona del plano focal y cercana al mecanismo de mascarillas, no puede ser mayor a 9.53 mm ya que el espacio es muy limitado a causa de la cercanía de las lentes de campo y mas aun porque este tiene que ser inclinado 15 grados con respecto al plano focal.
El desplazamiento que se requerirá del subsistema para permitir pasar todos los haces del campo cuando se requiera será de al menos 150mm en la dirección del eje X.
7.1.2 Centro de masa
El centro de masa del subsistema R-M se encontrará de acuerdo a las coordenadas globales del instrumento:
Centro de masa: ( metros ) X = -0.005 Y = -0.021 Z = 0.003
7.1.3 Peso y momentos máximos
El peso de todo el subsistema R-M será de 4.64 kg. Centro de masa: ( metros )
X = -0.036 Y = 0.00
Z = -0.026
Momentos de inercia: ( kilogramos * metros cuadrados) Tomados desde el centro de masa y alineados con respecto al sistema de coordenadas globales Lxx = 0.018 Lxy = -0.005 Lxz = 0.004 Lyx = -0.005 Lyy = 0.051 Lyz = -0.001 Lzx = 0.004 Lzy = -0.001 Lzz = 0.062
Momentos de inercia: ( kilogramos * metros cuadrados) Tomados desde el sistema de coordenadas globales. Ixx = 0.021 Ixy = -0.005 Ixz = 0.009 Iyx = -0.005 Iyy = 0.060 Iyz = -0.001 Izx = 0.009 Izy = -0.001 Izz = 0.068

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 20 DE 52
7.2 Mecanismo de Rendija
7.2.1 Descripción
El mecanismo de la rendija consiste en dos navajas de Aluminio 6082 reflectoras sostenido por dos flejes paralelos, orientados a 60 grados con respecto al eje X, y que permiten su movimiento en un plano paralelo a las navajas. En la Figura 2 se muestra el plano con los ejes coordenados XY locales. Los dos flejes de cada navaja estarán fijos a la base principal. A las navajas por su parte posterior se transmite el movimiento a través de un perfil en forma de “C” que esta fijo a una tuerca de alta precisión modelo AJS127-02H marca Newport que se desliza sobre su eje roscado. El movimiento del perfíl en el eje perpendicular al plano será restringido por dos guías siendo solo permitido el deslizamiento en el eje X. Ver la Figura 6 para identificar las partes
Figura 6. Partes del mecanismo de rendija sin las navajas.
El eje roscado sobre el que se deslizará la tuerca será de 200 µm de avance por vuelta. El eje se conectará a un motor de pasos PJB42S33 marca Nippon. Si se tiene un control de 200 pasos por revolución esto representará 1 µm de avance por paso. El mecanismo
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 21 DE 52
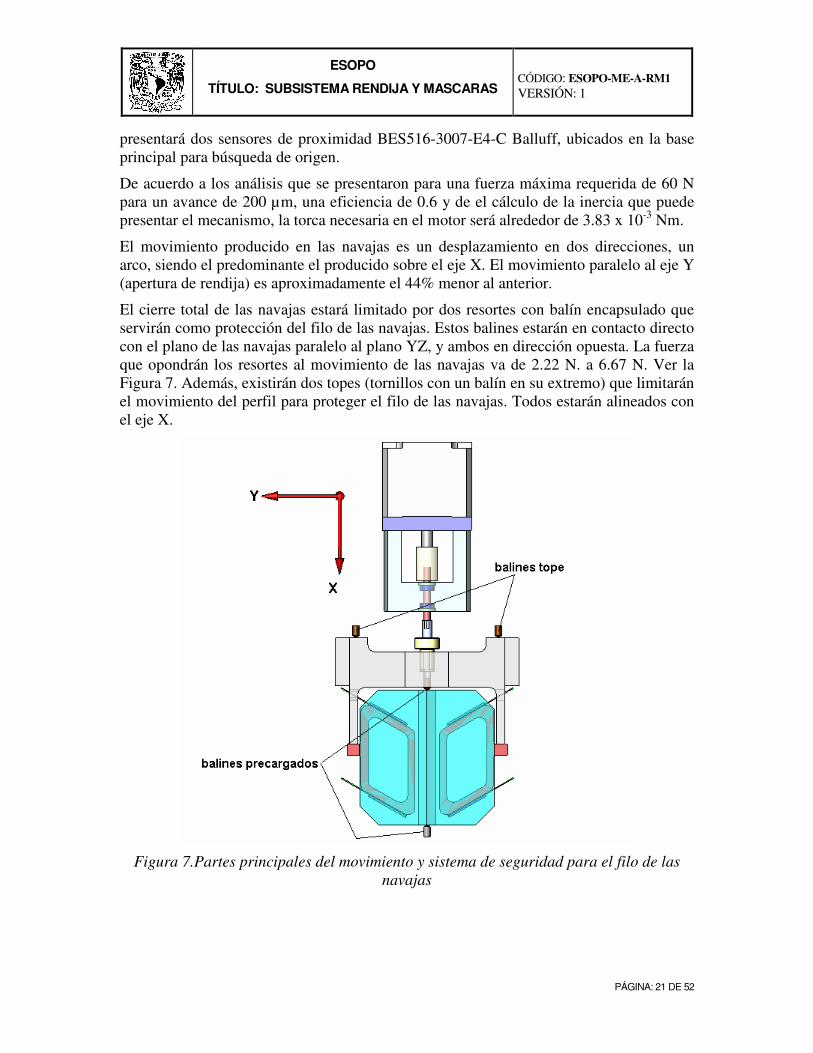
presentará dos sensores de proximidad BES516-3007-E4-C Balluff, ubicados en la base principal para búsqueda de origen.
De acuerdo a los análisis que se presentaron para una fuerza máxima requerida de 60 N para un avance de 200 µm, una eficiencia de 0.6 y de el cálculo de la inercia que puede presentar el mecanismo, la torca necesaria en el motor será alrededor de 3.83 x 10-3 Nm.
El movimiento producido en las navajas es un desplazamiento en dos direcciones, un arco, siendo el predominante el producido sobre el eje X. El movimiento paralelo al eje Y (apertura de rendija) es aproximadamente el 44% menor al anterior.
El cierre total de las navajas estará limitado por dos resortes con balín encapsulado que servirán como protección del filo de las navajas. Estos balines estarán en contacto directo con el plano de las navajas paralelo al plano YZ, y ambos en dirección opuesta. La fuerza que opondrán los resortes al movimiento de las navajas va de 2.22 N. a 6.67 N. Ver la Figura 7. Además, existirán dos topes (tornillos con un balín en su extremo) que limitarán el movimiento del perfil para proteger el filo de las navajas. Todos estarán alineados con el eje X.
Figura 7.Partes principales del movimiento y sistema de seguridad para el filo de las
navajas

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 22 DE 52
La apertura de la rendija estará registrada por dos codificadores lineales modelo SPECTO ST 1278 TT marca HEIDENHAIN, con una resolución de 1 µm. Estos codificadores estarán en contacto directo con las navajas. Será un codificador por cada navaja y descansarán sobre unas bases que se fijan al bastidor que servirán de interfaz con la estructura principal del espectrógrafo. La resolución de los codificadores nos ayudará a lograr la repetibilidad en posición de las navajas, que según los requerimientos es de +/- 5 µm.
El mecanismo de la rendija se unirá y transmitirá su peso a un bastidor a través de la base del motor y de los codificadores. A su vez el bastidor servirá para colocar o sacar el mecanismo de la rendija del campo de visión, a través de unos baleros lineales embalados que estarán acoplados a la estructura del espectrógrafo.
7.2.2 Dimensiones del mecanismo de rendija.
En las Figuras 8,9 se muestran las dimensiones totales de la rendija describiendo sus dimensiones generales un prisma de 0.301m x 0.181m x 0.044m. Además se muestra con línea punteada el campo requerido de 0.0465m.
Figura 8.Vista superior del mecanismo de rendija con dimensiones generales en el plano
local XY

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 23 DE 52
Figura 9.Corte del mecanismo de rendija con dimensiones generales en el plano local YZ
7.2.3 Centro de masa
El centro de masa se encontrará de acuerdo a las coordenadas globales del instrumento: Centro de masa: ( metros ) X = 0.000 Y = 0.051 Z = -0.002
7.2.4 Peso
El peso de todo el mecanismo de la rendija incluyendo motor y sensores será de 0.797 kg.
7.2.5 Material
El material empleado para todas las piezas a maquinar será aluminio 2024 T4 anodizado color negro, excepto las navajas de la rendija que serán de Aluminio 6082 pulido a calidad de espejo. Los marcos irán integrados a las navajas para minimizar espacio y asegurar la planicidad en el pulido. Los flejes serán adheridas a las navajas con la resina epóxica MasterBond EP21TCHT-1. Los flejes serán de acero inoxidable templado 301 de 0.41 x 10-3m (0.41mm) de espesor.
7.3 Mecanismo de Mascarilla
7.3.1 Descripción
El mecanismo de la mascarilla consiste en una mascarilla opaca de lamina de 100 µm de espesor que contendrá las configuraciones descritas en el documento de las especificaciones mecánicas del subsistema. Esta mascarilla estará fija sobre un bastidor que presentará cuatro orificios para fijarla y tensarla. El bastidor se podrá desmontar del mecanismo de posición para ser sustituida por otra de ser necesario. Ver Figura 10. El

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 24 DE 52
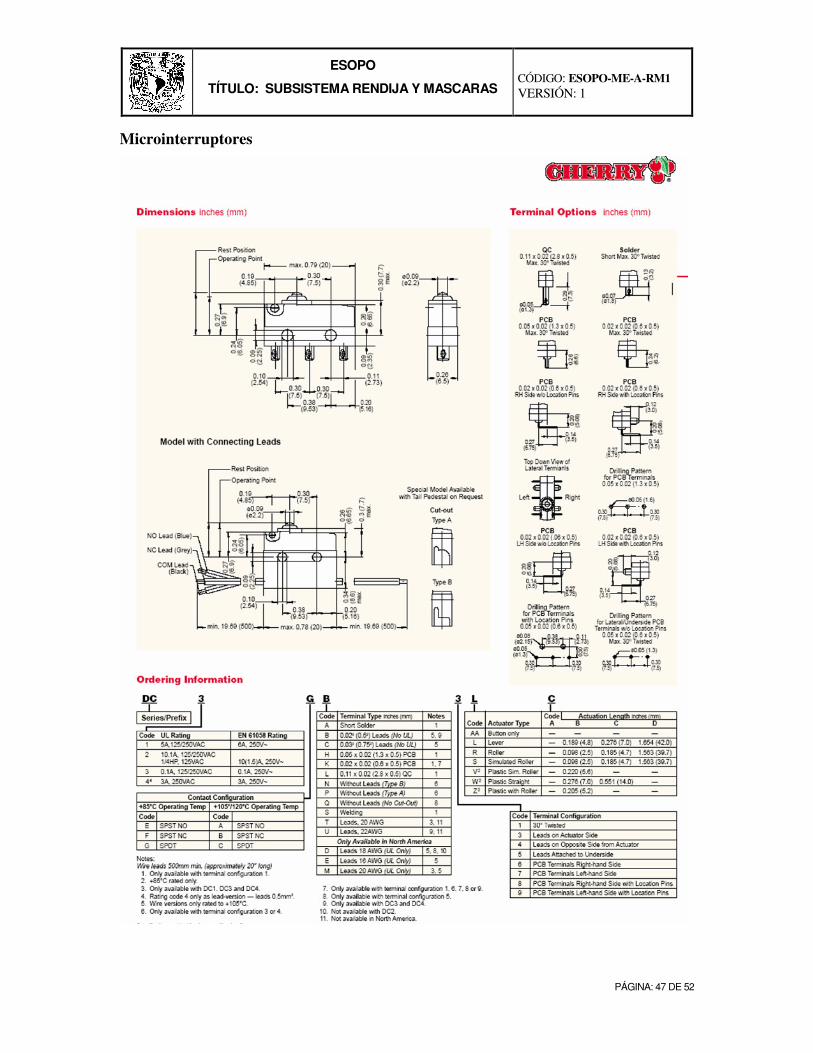
mecanismo de posición consiste en una mesa y su base acoplados con baleros lineales embalados VR1-60Hx16Z de la compañía THK. La mesa será colocada en posición a través de una tuerca embalada W0400MS-3PY-C3T1 de la compañía NSK que se deslizara sobre un eje roscado. Este eje estará acoplado a un motor de 200 pasos por revolución PJB42S33 marca Nippon. La base de la mesa presentará dos microinterruptores DC1C-A1RB marca Cherry, y la base de la tuerca unas indentaciónes para codificar la posición y fijar la mascarilla una vez desenergizado el motor.
Figura 10. Unidad Mascarilla con mecanismo de desplazamiento.
El mecanismo de mascarilla se unirá al bastidor que sujetará al subsistema dentro de la estructura del espectrógrafo a través de la base del motor y de la base de la mesa de posición. Dentro del diseño de detalle se considerará las reflexiones que provengan de las lentes de campo escalonando (bafles) en la medida de lo posible las piezas que quedan dentro del camino óptico hacia la mascarilla.
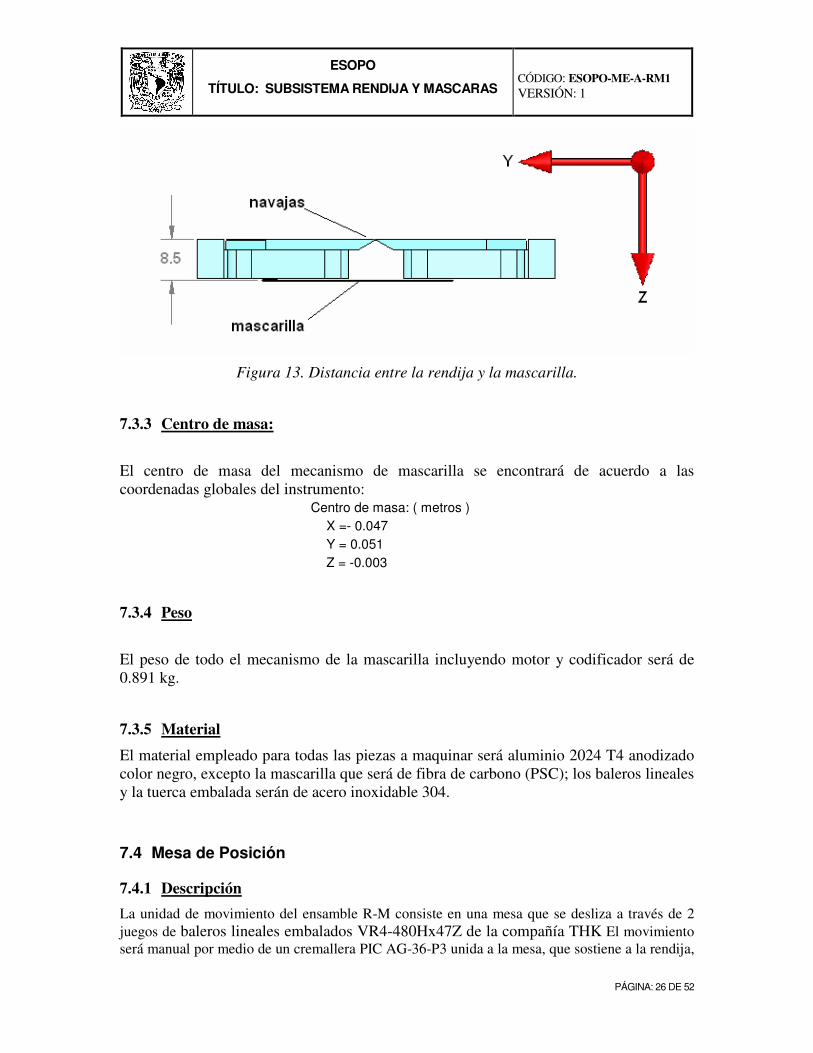
7.3.2 Dimensiones del mecanismo de mascarilla. En las Figuras 11,12 se muestran las dimensiones generales del mecanismo de mascarilla siendo sus dimensiones máximas un prisma de 200 mm x 169 mm x 43 mm. En la Figura 13 se muestra la distancia que existirá entre las navajas de la rendija y la superficie de la mascarilla que será de 8.5 mm.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 25 DE 52
Figura 11. Dimensiones del mecanismo de mascarilla sobre el plano local XY.
Figura 12. Dimensiones del mecanismo de mascarilla sobre el plano local XZ.
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 26 DE 52
Figura 13. Distancia entre la rendija y la mascarilla.
7.3.3 Centro de masa:
El centro de masa del mecanismo de mascarilla se encontrará de acuerdo a las coordenadas globales del instrumento:
Centro de masa: ( metros ) X =- 0.047 Y = 0.051 Z = -0.003
7.3.4 Peso
El peso de todo el mecanismo de la mascarilla incluyendo motor y codificador será de 0.891 kg.
7.3.5 Material
El material empleado para todas las piezas a maquinar será aluminio 2024 T4 anodizado color negro, excepto la mascarilla que será de fibra de carbono (PSC); los baleros lineales y la tuerca embalada serán de acero inoxidable 304.
7.4 Mesa de Posición
7.4.1 Descripción
La unidad de movimiento del ensamble R-M consiste en una mesa que se desliza a través de 2 juegos de baleros lineales embalados VR4-480Hx47Z de la compañía THK El movimiento será manual por medio de un cremallera PIC AG-36-P3 unida a la mesa, que sostiene a la rendija,

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 27 DE 52
y que será empujada por un piñon PIC Design F6-5 cuyo eje rotará sobre bujes que estarán fijos a una base atornillada a la base de la mesa. El mecanismo además contará con topes mecánicos y un pin precargado con punta cónica y candado que servirá para asegurar que la mesa siempre quede en la misma posición. La base a su vez se fijara al banco óptico de la estructura principal una vez que se ha probado el movimiento de la mesa de manera autonóma.
7.4.2 Centro de masa
Centro de masa: ( metros ) X =- 0.07 Y = 0.02 Z = 0.07
7.4.3 Peso y momento máximos
El peso de todo el mecanismo de la mascarilla incluyendo motor y codificador será de 2.95 kg.
7.4.4 Material
El material empleado para todas las piezas a maquinar será aluminio 2024 T4 anodizado color negro, excepto los baleros lineales, la cremallera, el eje y pin serán de acero inoxidable 304. Los bujes serán de bronce y las manivelas de aluminio.
Figura 14. Mesa de movimiento para las unidades de Rendija y mascarilla.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 28 DE 52
8. ANALISIS FEA
8.1 Para obtener el movimiento de la rendija deseado
Se efectuaron análisis por elementos finitos para simular el movimiento que realizarán los flejes unidos al marco donde se fijaran las navajas de la rendija, con la finalidad de encontrar tanto los desplazamientos deseados en apertura (eje Y) como los paralelos al eje X, de acuerdo a lo que ya se describió con respecto al movimiento de los flejes paralelos a los que se les aplica una fuerza en uno de sus extremos, y que describirá un arco. Además se realizaron estos análisis para encontrar el punto exacto de aplicación de la fuerza para producir una traslación del marco lo más paralela posible al eje X y para encontrar la fuerza requerida para producir la apertura. También, se investigó los esfuerzos producidos en los flejes.
En la tabla 1 se muestran las aperturas de rendija mas empleadas en este tipo de instrumento.
No. Apertura de rendija
µm
Resolución
Seg.-arco
Paralelismo 10% de apertura
µm
3 61.6 0.8 6.61
4 77.0 1.0 7.70
5 92.4 1.2 9.24
6 154 2.0 15.4
Tabla 1. Aperturas de rendija requeridas y el paralelismo entre navajas.µm
Se emplearon dos modelos FEA a los que se les realizo análisis estático para llegar al diseño que aquí se presenta y se describen a continuación. El tipo de elementos empleados para las simulaciones es “bricks” y el programa es Algor versión 15. Las propiedades de material empleadas para simular el marco son las de acero inoxidable 302 para los flejes y de acero inoxidable 306 para el marco. Para producir el desplazamiento se aplico carga distribuida en el primer modelo y vectores de fuerza en el segundo.
8.1.1 1er Modelo
El primer modelo consistió de un marco con secciones perpendiculares, al que estaban unidos dos flejes con su correspondiente placa de fijación. A este modelo se le aplicaron condiciones de frontera, de restricción total tanto en traslación como en rotación a los bordes libres de los flejes y se le aplicó una carga distribuida perpendicular a una de las caras del fleje esto es paralela al eje X como se muestra en la Figura 15.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 29 DE 52
Figura 15. Primer modelo del marco
Las dimensiones de los componentes se muestran en la figura 16 y están dadas en metros.
Figura 16. Dimensiones del primer modelo
Los análisis a este modelo mostraron que si se aplica una fuerza en uno de los extremos superior o inferior del marco, el borde perpendicular a los flejes no se mueven de manera paralela al eje X (ver Figura 15), presentando diferencias mayores al aceptado. Además se requería de una fuerza de 49.80 N aplicada a una sola de las navajas para lograr un desplazamiento de 75 µm (muy próxima a la mitad de la apertura máxima deseada), esto significaría que se requeriría el doble para mover ambas navajas lo cual es excesivo para el tamaño de las partes y el desplazamiento deseado. [ESOPO-ME-A-RM-FL1, Tabla 1]
Este modelo, también, nos ayudó a determinar el espesor y el ancho mínimo del fleje, las dimensiones del marco, para que no se deformara más del desplazamiento requerido, la sensibilidad de respuesta y el punto de aplicación adecuado de la fuerza que produce el movimiento. Nos permitió determinar el rango de tolerancias en la diferencia de longitud
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 30 DE 52
de los flejes que no debe ser mayor a 500 µm y el paralelismo entre ellos que no debe ser mayor a 250 µm. [ESOPO-ME-A-RM-FL1, Tabla 2 y 3]
8.1.2 Segundo Modelo
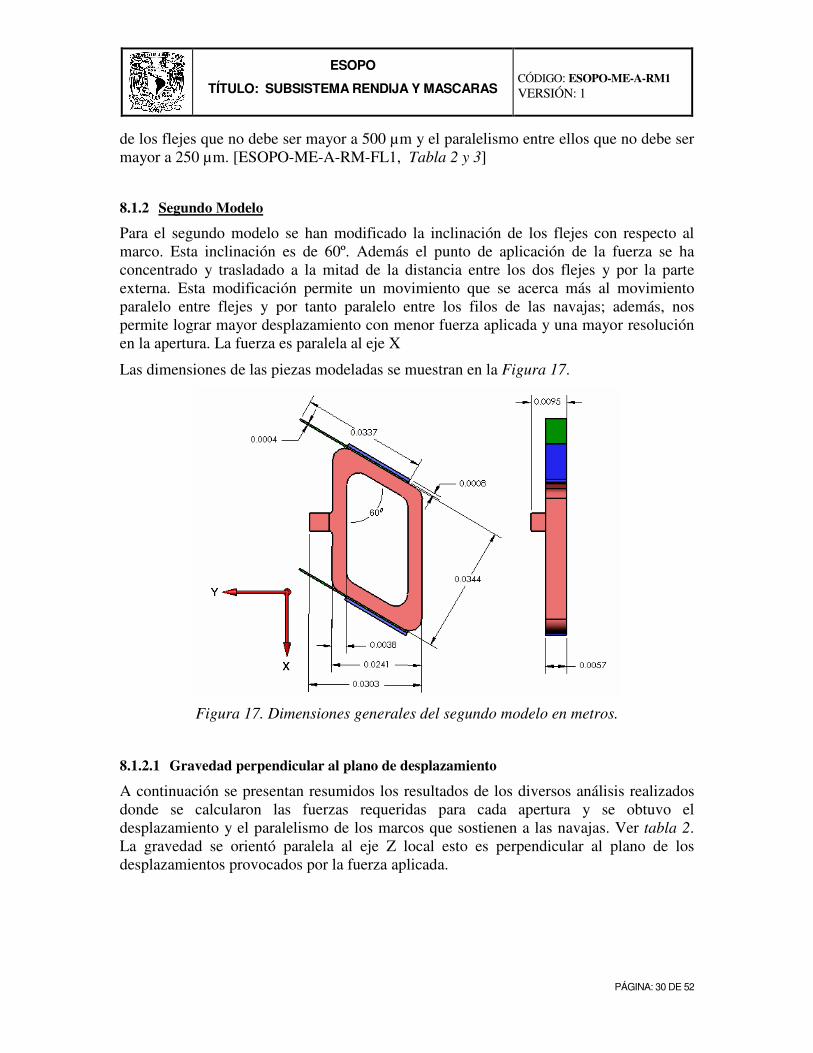
Para el segundo modelo se han modificado la inclinación de los flejes con respecto al marco. Esta inclinación es de 60º. Además el punto de aplicación de la fuerza se ha concentrado y trasladado a la mitad de la distancia entre los dos flejes y por la parte externa. Esta modificación permite un movimiento que se acerca más al movimiento paralelo entre flejes y por tanto paralelo entre los filos de las navajas; además, nos permite lograr mayor desplazamiento con menor fuerza aplicada y una mayor resolución en la apertura. La fuerza es paralela al eje X
Las dimensiones de las piezas modeladas se muestran en la Figura 17.
Figura 17. Dimensiones generales del segundo modelo en metros.
8.1.2.1 Gravedad perpendicular al plano de desplazamiento
A continuación se presentan resumidos los resultados de los diversos análisis realizados donde se calcularon las fuerzas requeridas para cada apertura y se obtuvo el desplazamiento y el paralelismo de los marcos que sostienen a las navajas. Ver tabla 2. La gravedad se orientó paralela al eje Z local esto es perpendicular al plano de los desplazamientos provocados por la fuerza aplicada.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 31 DE 52
Número Apertura Fuerza Puntos Puntos Paralelismo
Requerida superiores inferiores
µm N ∆y1(µm) ∆y2(µm) ∆y1-∆y2(µm)
1 30.8 11.57 30.24 29.86 0.38
2 38.5 14.68 38.39 37.91 0.48
3 61.6 23.58 61.67 60.90 0.76
4 77 28.91 75.63 74.70 0.93
5 92.4 35.14 91.93 90.79 1.14
6 154 57.82 151.30 149.42 1.87
Tabla 2.Aperturas de la rendija con la fuerza necesaria y el paralelismo logrado.
Los resultados que se presentan en la tabla son el doble del logrado con una sola navaja, ya que las componentes son simétricas con respecto al plano XZ. En la Figura 18 se ilustra el comportamiento de los flejes, el punto de aplicación de la fuerza y el desplazamiento del marco en el plano XY.
Si comparamos el paralelismo logrado entre marcos (ver Tabla 2) con respecto al permitido (ver Tabla 1), se ha logrado reducir la desviación a un 10% con el diseño que aquí se propone.
En cuanto al comportamiento de los marcos con respecto al plano XY cuando la gravedad es perpendicular a este tenemos que la diferencia de un extremo del marco al opuesto es de 20 ηm y se produce una caída mínima de todo el marco de 0.106 µm. De los valores que se presentan podemos concluir que la contribución del desplazamiento en el eje óptico de la rendija debido al mecanismo de las navajas es menor a las tolerancias permitidas que son de +/-38 µm.].
Dirección Apertura Punto Punto Desviación
Gravedad superior inferior
µm ∆z1(µm) ∆z2(µm) ∆z1-∆z2(µm)
Z 30.8 0.12 0.13 -0.01
Z 154 0.11 0.14 -0.03
Tabla 3. Desplazamientos debidos a la gravedad en unidades de micrómetros.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 32 DE 52
Figura 18. Desplazamiento máximo de la rendija.
El mínimo desplazamiento en X de la primera apertura es de 26.30 µm y el máximo es de 131.55 µm. Estos valores nos dan la cota de los desplazamientos lineales esperados en la tuerca de precisión y en el desplazamiento de los espejos.
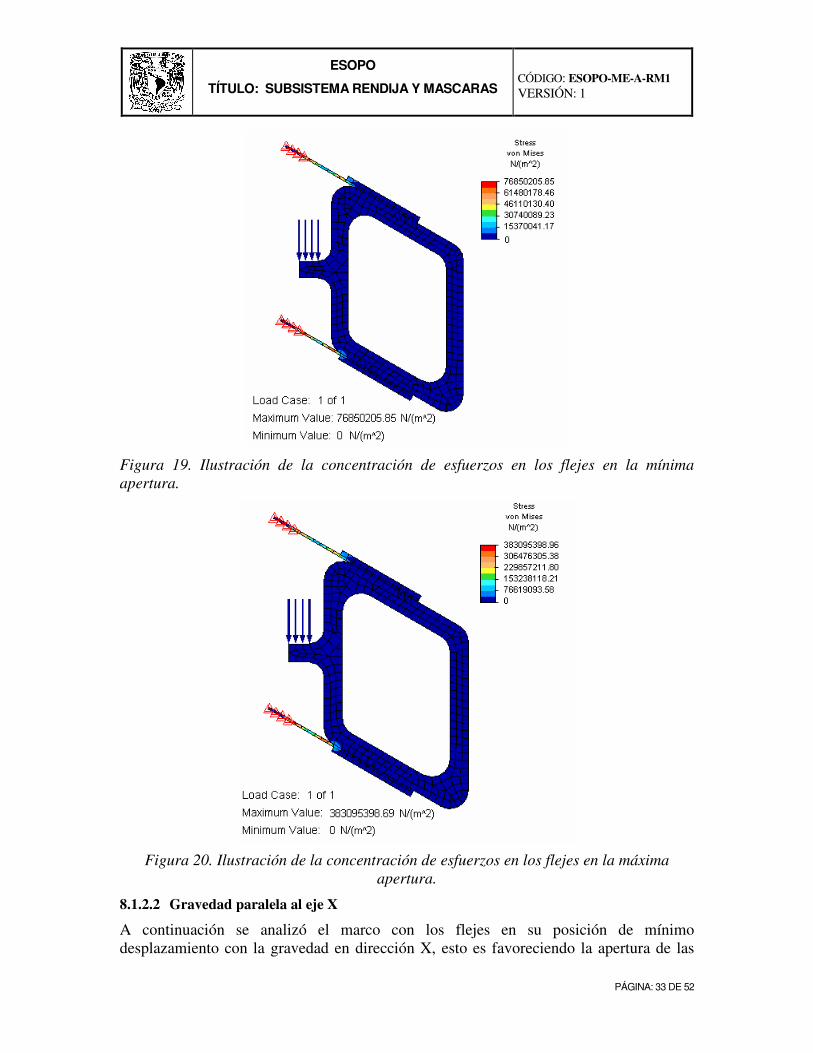
Los esfuerzos máximos se presentan en los flejes y van desde un valor de 76.85 MPa. En el mínimo desplazamiento a un máximo de 383 MPa que es la tercera parte del esfuerzo máximo a deformación en el acero templado, 1013 MPa. Ver las Figuras 19 y 20.
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 33 DE 52
Figura 19. Ilustración de la concentración de esfuerzos en los flejes en la mínima
apertura.
Figura 20. Ilustración de la concentración de esfuerzos en los flejes en la máxima
apertura.
8.1.2.2 Gravedad paralela al eje X
A continuación se analizó el marco con los flejes en su posición de mínimo desplazamiento con la gravedad en dirección X, esto es favoreciendo la apertura de las

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 34 DE 52
navajas y el caso de máximo desplazamiento con la gravedad en contra, se obtuvieron los siguientes resultados:
Dirección Apertura Fuerza Puntos Puntos Paralelismo
Gravedad Requerida superiores inferiores
µm N ∆y1(µm) ∆y2(µm) ∆y1-∆y2(µm)
X 30.8 11.57 30.54 30.16 0.38
-X 154 57.82 151.05 150.71 0.34
Tabla 4. Desplazamientos debidos a la gravedad en micrómetros.
Los resultados en desplazamiento que se presentan en la Tabla 4 son el doble del logrado con una sola navaja ya que las componentes son simétricas con respecto al plano XZ.
En la posición de mínima apertura el hecho de que cambie la dirección de la gravedad perpendicular al plano XY a paralela a este plano no afecta el paralelismo, mas si cambia la apertura 0.3 micrómetros; mientras que en la posición de máxima apertura el hecho de que la gravedad actúe en dirección contraria al desplazamiento en X favorece al paralelismo de las navajas y no afecta en su apertura.
De lo anterior se deduce que podemos esperar un desplazamiento de décimas de micrómetros cuando las navajas sean inclinadas o giradas con respecto al eje Y global, lo cual muestra que su contribución al desplazamiento permitido que es de +/-38 µm, es un factor de cien menor.
En cuanto a los desplazamientos del marco en la dirección Z, tenemos que la diferencia de un extremo del marco al opuesto es de 6 nm.
8.1.2.3 Gravedad a 15 grados con respecto al eje Y
Posteriormente se analizó el marco con los flejes en su posición de mínimo y máximo desplazamiento con la gravedad a 15 grados del eje Y y se obtuvieron los resultados que se muestran en la Tabla 5.
Dirección Apertura Puntos Punto Desviación
Desplazamiento superiores inferior
µm ∆1(µm) ∆2(µm) ∆1-∆2(µm)
Y 30.8 30.28 29.90 0.38
Y 154 151.34 149.47 1.87
Z 30.8 0.12 0.13 -0.01
Z 154 0.10 0.14 -0.03
Tabla 5. Desplazamientos debidos a la gravedad en micrómetros.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 35 DE 52
Comparando los valores de la Tabla 2 con los aquí mostrados nos podemos dar cuenta que la apertura entre marcos no se ve afectada tanto en su posición de mínimo como de máximo desplazamiento y por tanto su paralelismo. El desplazamiento en el eje Z también es el mismo. De esto podemos concluir que el comportamiento de los marcos con los flejes que sostendrán a las navajas no se verá afectado si el mecanismo se inclina 15 grados.
8.2 Para obtener el comportamiento del ensamble R-M ante las cargas
gravitatorias y térmicas.
El tipo de elementos empleados para las simulaciones es “bricks” y el programa es Algor versión 18. Las propiedades de material empleadas para simular el marco y las navajas son las del aluminio 6082, para los flejes acero inoxidable 306. El resto de las piezas se han definido con los materiales Al2024, acero inoxidable 304, bronce grafitado, etc. Para producir el desplazamiento esperado, se aplicó carga térmica de 6° C y gravedad.
Se analizaron tres casos: al primero solo se aplicó la carga gravitatoria en dos direcciones una cuando está al cenit, otra a 6 horas; al segundo caso solo se le aplicó la térmica y al tercero ambas cargas (gravitatoria y térmica).Los resultados mas importantes de los análisis al subsistema rendija-mascarilla con la mesa de entrada y salida del subsistema son los desplazamientos y rotaciones debidas a la gravedad cuando el telescopio esta orientado hacia al cenit y también debidas al gradiente térmico de 6 grados en conjunto.
En la tabla 6 se presentan los resultados con respecto al punto de control que en el caso del subsistema R-M es el origen del instrumento.
Estos resultados sirvieron de entrada para el análisis del presupuesto de error del instrumento.
Tabla 6. Desplazamientos del punto de control en el subsistema.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 36 DE 52
Figura 21. Desplazamientos máximos en el eje Z del subsistema con gravedad y térmico.
A continuación se presenta la tabla con los valores obtenidos de las deformaciones del filo de las navajas en el caso extremo cuando la dirección de la gravedad es paralela al eje óptico y está presente la carga térmica.
UNA NAVAJA Cotas en m Gravedad y térmico( 6°)
DX DY DZ inferior derecho 4.4244E-06 1.3781E-06 -1.4854E-05 superior derecho -4.2910E-06 1.3485E-06 -1.4942E-05 Diferencia en extremos -1.3331E-07 -2.9560E-08 8.7800E-08
Las navajas en sus extremos con respecto al centro de las mismas se flexionan 4.19 µm en dirección X, 35.30 µm en Z y 44.53 ηm en Y (dirección de apertura).
En la figura 22 se puede constatar que la rendija se ha desplazado 15 micras en promedio con respecto al foco o punto de control y este valor es inferior a la tolerancia especificada de 38 µm.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 37 DE 52
Figura 22. Desplazamientos máximos en el eje Z de las navajas con las dos cargas.
9. PULIDO DE LAS SUPERFICIES ÓPTICAS DE LA RENDIJA
En el Instituto de Astronomía CU se pulió una superficie de aluminio de la serie 7000 con diferentes métodos. Las tres muestras a pulir tenían las dimensiones de 15 x 45 x 15 mm c/u y se pegaron juntas. De los tres métodos el que mejor resultados dio fue el chapopote con oxido de cerio y se alcanzó una microrrugosidad de 32nm, con una rugosidad de 24 micras, y la reflectancia obtenida dista de lo esperado de una superficie óptica ordinaria. Se cree que el chapopote al actuar con el óxido de cerio obscurece el aluminio disminuyendo su reflectancia.[ Resultados de las pruebas de pulido en aluminio como navajas para la rendija del ESOPO ].
En el Observatorio Astronómico Nacional se caracterizó la rendija de Boller & Chivens y se encontró que las navajas de la rendija son de acero con una microrugosidad de 25 nm y un filo de navaja de 3.6 µm.
Actualmente se está cotizando el pulido de dos navajas en Al6082 pulido a calidad de espejo con una microrugosidad de 25 nm, filos de 5 µm, planicidad de ½ λ, de acuerdo a las dimensiones mostradas en el plano que se muestra en la sección 12 apéndice 1.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 38 DE 52
Las navajas han sido integradas a los marcos y estos a su vez serán montados y alineados a la base principal.
10. CONCLUSIONES
Se ha logrado un diseño de mecanismo para el movimiento de rendija que cumple con un amplio margen los requerimientos y especificaciones para el subsistema, así también con el mecanismo de mascarilla.
Los requerimientos de peso han sido cumplidos
En la fabricación de las navajas como espejos calidad óptica ya se tiene certeza de que se podrá fabricar en un taller especializado y se podrá cumplir con las especificaciones aquí descritas.

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 39 DE 52
11. APENDICE 1. PLANOS DE FABRICACIÓN
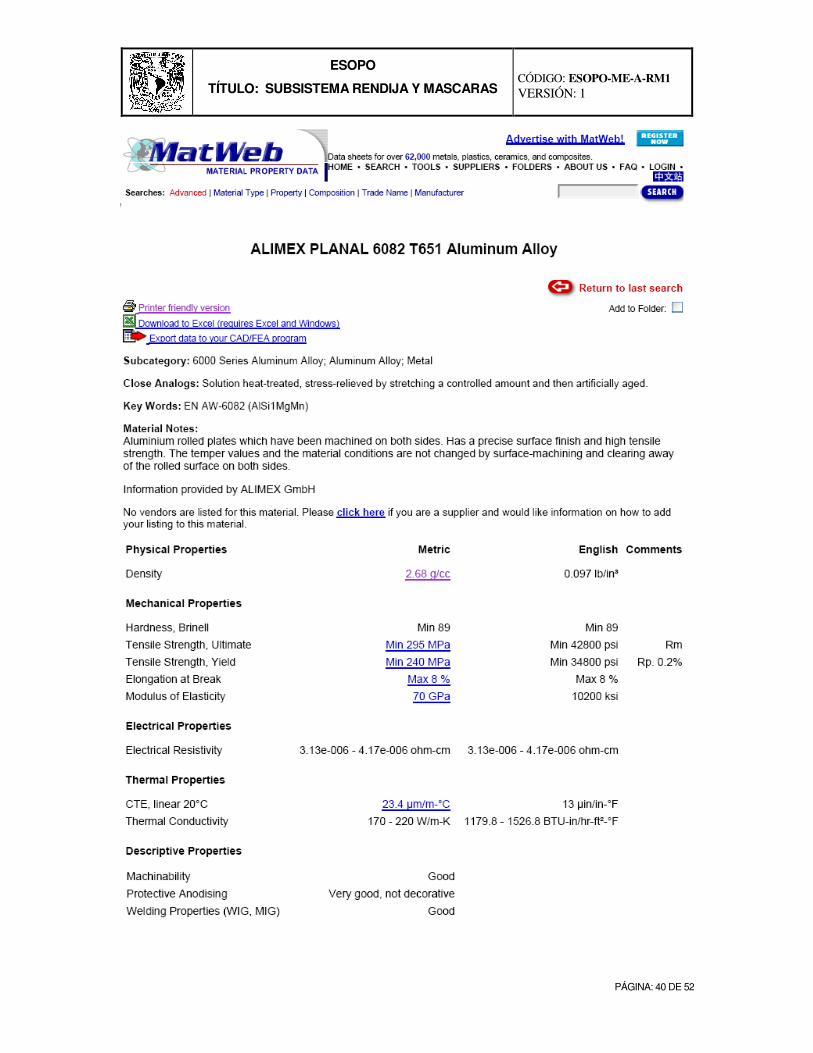
A continuación se muestra uno de los dos planos elaborados para cotizar las navajas de la rendija. Sus requerimentos y especificaciones fueron obtenidos de los documentos de las especificaciones mecánicas del subsistema y de la caracterización que se hizo de la rendija del Boller & Chivens [Algunas características ópticas de la rendija del espectrógrafo Boller & Chivens]. También se muestran las propiedades del material Al6082, uno de los aluminios con mejores propiedades para obtener una superficie refectora de calidad.
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 40 DE 52

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 41 DE 52
12. APENDICE 2. PARTES COMERCIALES
Codificadores lineales de posición

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 42 DE 52
Motores de Pasos

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 43 DE 52
Tornillos de Precisión
AJS SeriesHigh-Precision Adjustment Screws
Detail Pricing Related Products Datasheets/Support/Downloads
Summary Specs Compare Drawing/Graphics
Key Features
Sub-micron sensitivity High-resolution 100 TPI screws, plus 127 and 20 TPI Patented lock that does not influence the screw position — a Newport exclusive Knobs with an integral hex hole for increased sensitivity Please call us regarding custom OEM designs

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 44 DE 52
Printable
CAD/3D Model
Demos
Add this page to My Links

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 45 DE 52
Home / Product / Motion Control / Manual Actuators
AJS SeriesHigh-Precision Adjustment Screws
Compare More Products From Manual Actuators
Below is a list of specifications that are common between all selected part numbers. To see all specifications for a particular part number, click on that part number.
AJS127-0.5
AJS127-02H
Drive, Screws Drehknopf ,Knob Drehknopf ,Hex
Incremental Motion, Min Actuator 0.6 µm,0.75 µm 0.6 µm,0.75 µm
Load Capacity 20 lb 20 lb
Load Capacity - SI 90 Newton 90 Newton
Lock, Screws Side Lock End Lock
nodeattribute_description AJS127-0.5 ,AJS Series AJS127-02H ,AJS Series
Ordering Description Fine Adjustment Screw Fine Adjustment Screw
Resolution, Actuator 0.6 µm 0.6 µm
Sensitivity 0.6 µm 0.6 µm
Thread 1/4-127 1/4-127
Thread - SI 127 TPI 127 TPI
Travel 0.5 inch 0.25 inch
Travel - SI 12.7 mm 6.35 mm
Travel, Angular/Translation U100-A/P 14°/0.40 (10.2) 5°/0.15 (3.8)
Travel, Angular/Translation U200-A/P 10°/0.40 (10.2) 4°/0.15 (3.8)
Travel, Angular/Translation U300-A/P 7.8°/0.40 (10.2) 2.7°/0.15 (3.8)

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 46 DE 52
Sensores de Proximidad
ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 47 DE 52
Microinterruptores

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 48 DE 52

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 49 DE 52
Baleros lineales

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 50 DE 52
Tuerca embalada

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 51 DE 52
Aluminio

ESOPO
TÍTULO: SUBSISTEMA RENDIJA Y MASCARAS
CÓDIGO: ESOPO-ME-A-RM1 VERSIÓN: 1
PÁGINA: 52 DE 52
13. REFERENCIAS Y BIBLIOGRAFÍA
� Resultados de las pruebas de pulido en aluminio como navajas para la rendija del ESOPO. Oscar Chapa, Comunicación Interna, Instituto de Astronomía
� Algunas características ópticas de la rendija del espectrógrafo Boller & Chivens. Esteban Luna et. al.