
Trabajo de Fin de Grado -...
75
Equation Chapter 1 Section 1 Trabajo de Fin de Grado Grado en Ingeniería de las Tecnologías Industriales Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante Dep. Ingeniería Mecánica y Fabricación Escuela Técnica Superior de Ingeniería Universidad de Sevilla Sevilla, 2016 Autor: Francisco Javier Souto Esquivel Tutor: Alfredo de Jesus Navarro Robles
Transcript of Trabajo de Fin de Grado -...
Equation Chapter 1 Section 1
Trabajo de Fin de Grado
Grado en Ingeniería de las Tecnologías
Industriales
Análisis Dinámico y Simulación Numérica de una
Máquina de Ensayos a Fatiga Biaxial Resonante
Dep. Ingeniería Mecánica y Fabricación
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2016
Autor: Francisco Javier Souto Esquivel
Tutor: Alfredo de Jesus Navarro Robles


iii
Trabajo de Fin de Grado
Grado en Ingeniería de las Tecnologías Industriales
Análisis Dinámico y Simulación Numérica de una
Máquina de Ensayos a Fatiga Biaxial Resonante
Autor:
Francisco Javier Souto Esquivel
Tutor:
Alfredo de Jesus Navarro Robles
Catedrático
Dep. de Ingeniería Mecánica y Fabricación
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2016


v
Trabajo de Fin de Grado: Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga
Biaxial Resonante
Autor: Francisco Javier Souto Esquivel
Tutor: Alfredo de Jesus Navarro Robles
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
El Secretario del Tribunal
Sevilla, 2016


vii

ix
Agradecimientos
Quisiera comenzar dando las gracias a Alfredo por su valor de meterse a hacer el TFG con un alumno que, en
el momento de hacerlo, vivía en el extranjero; así como su atención y preocupación por, tanto los asuntos del
trabajo, como los del ámbito personal. Si este trabajo llega a buen puerto es, en gran medida, gracias a él.
A mi familia, todo el agradecimiento del mundo por la oportunidad que me han brindado este año, el apoyo
durante estos cuatro años y el cariño desde el día que nací. Ellos son el motivo por el cual siempre he intentado
dar lo mejor de mi en cada situación. A mi padre, por su experiencia y sus consejos; a María, a la que le deseo
la mayor de las suertes en esta nueva etapa; y a mi madre por su santa paciencia, su interés, su comprensión, su
empatía, y mil cosas más por las que no se me ocurre como un dia le podré compensar.
A todos mis amigos, por acompañarme desde el principio y, espero, hasta el final.
A Susana, por aguantar lo que ha aguantado este año.
Gracias a todos ellos soy quien escribe estas palabras hoy.
Francisco Javier Souto Esquivel
Sevilla, 2016

xi
Resumen
El presente trabajo de fin de grado describe el modelo matemático de una máquina de fatiga biaxial resonante
descrita en el artículo “Engineering Steels Under Combined Cyclic and Static Stresses”, por H.J. Gough para
el “Journal of Applied Mechanics” en junio, 1950.
El objetivo de este documento es estudiar el comportamiento dinámico del sistema, haciendo especial hincapié
en el estudio de las frecuencias naturales y de las reacciones indeseadas en la probeta a ensayar. Asimismo, se
pretende proveer de un modelo numérico del sistema basado en lo expuesto anteriormente, de cara a estudiar
la respuesta y sus propiedades ante distintas excitaciones.
En el documento se presenta el planteamiento, implementación y pruebas del sistema a través de un conjunto
de simulaciones que pretenden arrojar la mayor cantidad de información posible sobre este.


xiii
Abstract
This Bachelor Thesis describes a mathematical model based upon a machine for bi-axial fatigue tests first
described in “Engineering Steels Under Combined Cyclic and Static Stresses “, by H.J Gough for the Journal
of Applied Mechanics in June, 1950.
The goal of this paper is to study the dynamic behavior of the system, paying special attention to the
discussion on the natural frequencies of the system and the unwanted reactions in the system specimen. As
well, the paper intends to provide a numerical model of the system based on the analysis previously made, in
order to study the response of the machine under different scenarios.
This document depicts the analytical procedures, implementation and tests on the numerical model through a
full set of simulations that aim to show the biggest possible amount of information about it.

Índice
Agradecimientos ix
Resumen xi
Abstract xiii
Índice xiv
Índice de Tablas xvii
Índice de Figuras xix
Notación xxii
1 Introducción 25
2 Descripción del Sistema Real 27
3 Planteamiento Matemático 31 3.1. Modelo Matemático 31
3.1.1. Pequeños Desplazamientos 31 3.1.2. Barras Elásticas 31 3.1.3. Probeta 31 3.1.4. Determinación de los Grados de Libertad 32
3.2. Obtención de los Parámetros del sistema 33 3.2.1. Longitudes y Masas 33 3.2.2. Rigideces de los Muelles 34 3.2.3. Propiedades de las Ballestas 35 3.2.4. Inercias 36
3.3. Determinación del Lagrangiano 36 3.3.1. Cinemática de los Centros de Gravedad de las barras 36 3.3.2. Energías Cinética y Potencial 37
3.4. Obtención de las Ecuaciones de Movimiento 38 3.5. Cálculo del Centro de Percusión 39 3.6. Frecuencias Naturales del sistema 40
4 Resolución en MATLAB® 45 4.1. Solución del Sistema 45
4.1.1. Principios de Funcionamiento 45 4.1.2. Programa 46

xv
4.2. Tratamiento de los Resultados 52
5 Resultados de la Simulación Numérica 55 5.1. Resultados en Vibración Libre 55 5.2. Resultados en Vibración Forzada 56 5.3. Resultados en Resonancia 58
6 Conclusiones 61
Referencias 64
Anexos 66


xvii
ÍNDICE DE TABLAS
Tabla 3–1. Propiedades del material de las probetas ensayadas por Gough 35
Tabla 4–1 Contenido del struct solución de ode45 52


xix
ÍNDICE DE FIGURAS
Figura 2-1. esquema y foto de la máquina de fatiga biaxial resonante 27
Figura 2-2. vistas de la máquina a escala 28
Figura 3-1. conjunto de muelles que simulan las rigideces de la probeta ante las solicitaciones 32
Figura 3-2. detalle de las trayectorias real y aproximada del sistema 32
Figura 3-3. modelo matemático del sistema 33
Figura 3-4. giros de la barra superior en T 33
Figura 3-5. geometría de una de las probetas ensayadas por Gough 34
Figura 3-6. sección estimada de las ballestas 36
Figura 3-7. esquema de como la barra 6 transmite el momento a la probeta 40
Figura 3-8. modos del vibración del sistema 42
Figura 5-1. respuesta del sistema en vibración libre 56
Figura 5-2. respuesta del sistema en vibración forzada 57
Figura 5-3. respuesta del sistema en resonancia 58
Figura 6-1. detalle de los rotores desequilibrados del sistema 62
Figura 6-2. respuesta con discos con diferentes masas 62


xxi

Notación
A* Conjugado
c.t.p. En casi todos los puntos
c.q.d. Como queríamos demostrar
∎ Como queríamos demostrar
e.o.c. En cualquier otro caso
e número e
IRe Parte real
IIm Parte imaginaria
sen Función seno
tg Función tangente
arctg Función arco tangente
sen Función seno
sinxy Función seno de x elevado a y
cosxy Función coseno de x elevado a y
Sa Función sampling
sgn Función signo
rect Función rectángulo
Sinc Función sinc
∂y ∂x
x◦
Derivada parcial de y respecto
Notación de grado, x grados.
Pr(A) Probabilidad del suceso A
SNR Signal-to-noise ratio
MSE Minimum square error
: Tal que
< Menor o igual
> Mayor o igual
\ Backslash
⇔ Si y sólo si


1 INTRODUCCIÓN
a necesidad de este trabajo surge del interés por el comportamiento dinámico y propiedades de una
máquina descrita en el artículo “Engineering Steels Under Combined Cyclic and Static Stresses”, por
H.J. Gough para el “Journal of Applied Mechanics” en junio, 1950.
El propósito, concretamente, es el de hallar unas ecuaciones de movimiento que describan al sistema de la
forma más fiel posible y, a partir de estas ecuaciones, determinar los modos de vibración, frecuencias naturales
y las reacciones que se producen en la probeta a ensayar como resultado de los momentos aplicados.
Asimismo, se pretende dotar al lector de un modelo matemático implementado en MATLAB®, para permitir
el estudio de este sistema ante distintos estímulos y con diferentes parámetros.
La máquina en cuestión está pensada para trabajar con una excitación de frecuencia cercana a la natural, de
cara a aprovechar sus propiedades amplificadoras. Así, en el presente trabajo se hallan los valores de dichas
frecuencias y se pone a prueba el modelo, para estudiar el efecto de la resonancia y amplificación de la
frecuencia natural en el sistema.
Otra propiedad a tener en cuenta es la posibilidad de evitar reacciones indeseadas en la probeta cuando se
lleven a cabo los ensayos. Por la geometría del sistema, se conoce que una fuerza ejercida en el centro de
percusión de la barra encargada de transmitir los momentos a la probeta produce reacciones en esta nulas.
Dicha hipótesis es estudiada para comprobar su validez, aplicabilidad e impacto sobre el modelo numérico.
El modelo objeto de la simulación numérica es implementado en MATLAB® e integrado para obtener la
respuesta de cada uno de los grados de libertad respecto al tiempo, así como las magnitudes derivadas de estos,
como los ángulos y fuerzas de flexión y torsión de la probeta. Este modelo cuenta con parámetros
aproximados del sistema real que se discuten en el cuerpo del trabajo, estando estos abiertos a la modificación
de los mismos en un futuro basada en, por ejemplo, un ensayo de la máquina real con un equipo de medición
controlando la variación en los grados de libertad propuestos.
L

Introducción
26

2 DESCRIPCIÓN DEL SISTEMA REAL
a mayor parte de los fallos en estructuras y maquinas que tienen que lidiar con cargas variables
encuentran su motivo en el fenómeno de la fatiga y fractura de los materiales [3]. De las catástrofes
relacionadas con este fenómeno surge la necesidad del estudio de la resistencia de los materiales ante
cargas cíclicas, que se llevara a cabo mediante ensayos de los materiales y modelos probabilísticos de cuando
un determinado material y geometría fracturaría ante un régimen de carga. En este marco, con el afán y la
necesidad de ensayar diferentes materiales ante diferentes solicitaciones, surgen los bancos de ensayo a fatiga
y, entre ellos, el cual es objeto del trabajo.
La MFBR induce ciclos de momentos a la probeta producidos por las fuerzas centrífugas de un rotor
desequilibrado. Este rotor consiste en dos discos con una masa desequilibrada cada uno movidos por un motor
síncrono. El “setting angle” tita (θ), que es el ángulo que forman los planos verticales que contienen a la
probeta y el brazo que le transmite el momento; determina en qué medida las tensiones cíclicas aplicadas son
de torsión o flexión.
Figura 2-1: esquema y foto de la máquina de fatiga biaxial resonante
La máquina también consta de un sistema de suspensión y amortiguamiento compuesto por dos ballestas
horizontales, diseñadas para compensar la inercia del resto de elementos que vibran o rotan. De cara a imponer
tensiones estáticas en la probeta, a estos elementos elásticos se les pueden aplicar unas deflexiones iniciales.
Como se ve en la fig. 2-1, los extremos de las ballestas están sujetos rígidamente a unas mordazas que pueden
deslizar independientemente en unos railes montados en el soporte de la máquina. Estas mordazas pueden
fijarse en cualquier posición, correspondiendo a las deflexiones d1 y d2, las cuales se establecen de forma
minuciosa en régimen estático.
Los rotores desequilibrados provocan que toda la estructura suba y baje, pero la estructura, al no ser simétrica
por las deflexiones iniciales, no oscilará de forma simétrica. Esta diferencia entre las oscilaciones del lado
derecho e izquierdo provocan un giro en la barra horizontal superior, la cual a su vez impone una rotación
L

Descripción del sistema real
28
Figura 2-2: vistas de la máquina a escala

sobre la barra que transmite la carga a la probeta. Así pues, un setting angle de 0º y unas deflexiones d1 y d2
nulas o iguales provocan que la estructura sea simétrica y, consecuentemente, que la probeta experimente
ciclos de carga de flexión pura; con tensiones estáticas o no dependiendo de si d1=d2 es igual a 0 o distinto de
0. Mientras que el mismo escenario, con una tita igual a 90º, presenta iguales resultados, pero con torsión pura.
Cualquier setting angle intermedio o diferencia en las deflexiones iniciales provoca un escenario de carga
cíclica tanto de torsión como flexión combinadas.
Así pues, fijando unas deflexiones y una omega, la maquina estaría lista para funcionar, estando los momentos
de torsión y flexión controlados por las deflexiones iniciales, la velocidad de giro del motor, que es constante;
el valor de las masas sujetas a los discos y el “setting angle”.

Descripción del sistema real
30

3 PLANTEAMIENTO MATEMÁTICO
l presente capítulo expone el modelo matemático que será objeto de las simulaciones, desde las
simplificaciones del modelo real a la obtención de las ecuaciones de movimiento; así como la
conversión de los datos de un modelo al otro. El objetivo de este capítulo es conseguir un sistema de
ecuaciones diferenciales que, de ser no lineal, debe ser apto para su implementación en MATLAB®.
3.1 Modelo Matemático
El sistema a estudiar está basado en el de la figura 2-1, formado por 6 barras, siendo las dos ballestas
inferiores, las dos barras verticales, el travesaño y la barra que transmite el momento a la probeta. Para el
modelo matemático se toman las siguientes consideraciones.
3.1.1 Pequeños Desplazamientos
Por la naturaleza de la máquina a estudiar como banco de ensayos de probetas a fatiga, podemos asumir que
los desplazamientos y, por ende, las fuerzas y momentos transmitidas a la probeta serán de valor pequeño y
frecuencia elevada, para alcanzar la magnitud de ciclos normal en este tipo de ensayos. Por esto, de ahora en
adelante se considerarán pequeños desplazamientos en el sistema, con todo lo que esto conlleva.
3.1.2 Barras Elásticas
Las dos ballestas inferiores se modelan como dos barras elásticas con un extremo fijo y uno móvil, siendo
estos, respectivamente, el punto de anclaje al soporte de la máquina y el punto en el que la ballesta conecta con
su barra vertical correspondiente y el rotor.
Para el modelado de estos elementos se determina, por el método de Rayleigh-Ritz, un número de funciones
de forma para asemejarse lo máximo posible a la deformada real de la barra; para así calcular sus energías
cinética y potencial. En el sub apartado 2 de este capítulo, cuando se determina el valor de los distintos
parámetros del sistema, se discutirá el número y tipo de funciones de forma elegidas.
3.1.3 Probeta
Para simular el comportamiento de la probeta y su rigidez tanto a flexión como a torsión se toman dos muelles
asociados al movimiento de la barra 5-6 de la forma que se aprecia en la figura 3-1.
E

Planteamiento Matemático
32
Figura 3-1: conjunto de muelles que simulan las rigideces de la probeta ante las solicitaciones
Estos muelles, además de depender de la rigidez del espécimen a las distintas cargas y, por ende, de su
geometría y material; además dependerán del “setting angle” tita, que como se vio en el capítulo anterior
determina en qué medida el ensayo será de flexión, torsión o combinado. De esta forma, con una tita=0 se
tendría una K1 que sería la rigidez a torsión sin más y una K2 con la rigidez a flexión, y con tita=90º lo
opuesto. El valor de estos parámetros y su dependencia respecto a tita es discutida en el sub apartado siguiente.
3.1.4 Elección de los Grados de Libertad
Antes de determinar los grados de libertad, se debe aclarar que, para el cálculo de las ecuaciones de
movimiento, se sigue un planteamiento usando las ecuaciones de Euler-Lagrange. Por lo tanto, los grados de
libertad deberán ser las coordenadas generalizadas que luego serán objeto de las integraciones y cálculos
pertinentes del procedimiento considerado.
Con la consideración de pequeños desplazamientos impuesta los grados de libertad a tomar serán x1, x2 y x6,
siendo estos respectivamente el desplazamiento vertical de cada una de las mitades de la estructura y por
último el giro del rotor desequilibrado. X1 y x2 están medidos desde el punto de anclaje de las ballestas, de tal
manera que un valor igual a 0 implicaría una deformación nula de la misma. Además, el hecho de que x1 y 2
sean asociados a un desplazamiento vertical implica la imposibilidad de las ballestas de deformarse de
cualquier otra forma que no sea exclusivamente vertical.
La posibilidad de estudiar como otros gdl la inclinación de las barras verticales queda invalidada, ya que, como
se ve en la figura 3-2, se puede asemejar la trayectoria de los puntos 1 y 2 como rectas tangentes a la
trayectoria circular por ser de magnitud pequeña y colindante al punto tangente.
Figura 3-2: detalle de las trayectorias real y aproximadas del sistema
Con estos grados de libertad y unas deflexiones simétricas tendríamos unos movimientos idénticos de x1 y x2
haciendo que el sistema vibre verticalmente, y provocando, con una tita=0, carga de flexión únicamente. Por el
contrario, deflexiones distintas, que luego serán modeladas como posición de equilibrio de x1 y 2, provocarán
unos x1 y x2 distintos, aunque estrechamente relacionados como se estudiará posteriormente; provocando un
giro de las barras superiores y excitando a la probeta, de nuevo con un tita=0, a torsión.
Con estas consideraciones, el modelo que se ha tomado para representar el sistema real queda expuesto en la
figura 3-3.

Figura 3-3: modelo matemático del sistema
En la figura anterior se ven la forma y grados de libertad del sistema, así como una deformada para aclarar el
movimiento propuesto del sistema.
En resumen: se tienen 3 gdls, 6 barras además del rotor desequilibrado y el movimiento propuesto es que las
ballestas se deformen verticalmente, las barras verticales oscilen sin inclinarse y la barra superior gire respecto
a dos ejes, como se ve en la figura 3-4.
Figura 3-4: giros de la barra superior en T
3.2 Obtención de los Valores de los Parámetros
Para poder resolver la integración numérica de nuestro modelo se necesita sustituir cada parámetro por su
valor. Ya que el objetivo del modelo no es el de determinar con precisión la posición de cada punto sino el
estudiar la forma y propiedades de la respuesta, estos parámetros no necesitan de exactitud. Para la elección de
estos se estudian determinados criterios dependiendo de la naturaleza del parámetro, pero siempre con el
propósito de estar en el orden de magnitud correcto, lo que, con cierta seguridad, proporcionará una respuesta
dentro del orden de magnitud establecido.
Los parámetros a sustituir son las masas y tamaños de las barras, las constantes elásticas de los muelles, las
funciones de forma y propiedades de las ballestas y los momentos de inercia de los elementos que giran. Ahora
se detalla cada criterio tomado para determinar sus valores.
3.2.1 Masas y Longitudes
El cálculo de las longitudes se hará a partir de la figura 2-2, donde se ve un dibujo a escala de la máquina real.
A partir de estas medidas, se puede estimar el volumen de cada pieza para, usando una densidad media del
acero al carbono [4], poder determinar la masa de los distintos elementos. De esta forma se consiguen los
siguientes valores:

Planteamiento Matemático
34
𝜌 = 7860𝑘𝑔
𝑚3
l1=0.5176 m
l2=l1 m
lprin=0.3106 m
l3=0.3106 m
l4=0.3106 m
l5=0.3106 m
l6total=0.4026 m
𝑚 = 𝜌 · 𝑣𝑜𝑙𝑢𝑚𝑒𝑛
m1 =3.2547 kg
m2=m1 kg
m3=0.0002 kg
m4=m3;
m5=4.84 kg
m6=8.78 kg
Se omite el valor de l6 en este apartado pues será estudiado posteriormente, por ser de especial importancia
para evitar la aparición de esfuerzos cortantes en la probeta a estudio.
3.2.2 Rigideces de la Probeta
Para hallar las constantes elásticas de los muelles que simulan el comportamiento de la probeta se ha elegido
asemejarlos a las rigideces de una barra elástica. Así, usando las propiedades de la probeta, tanto del material
que la conforma como de su geometría, se obtienen las rigideces requeridas: a torsión y flexión.
Figura 3-5: geometría de una de las probetas ensayadas por Gough [1]

Tabla 3-1: Propiedades mecánicas del acero s65a, usado por Gough en sus ensayos como material de la
probeta
Propiedades Valores
Tensile limit of proportionality 47,0 tons per sq in
Upper yield point in tension 61,3 tons per sq in
Ultimate tensile strength 64,8 tons per sq in
Elongation at fracture 23,5%
Reduction of área at fracture 67%
Young’s Modulus, E 21,1 psi e-6
Brinnel hardness number 325
Torsional limit of proportionality 31,4 tons per sq in
Yield point in torsion 46,3 tons per sq in
Torsional modulus of rupture 57,3 tons per sq in
Total twist at fracture 2085 deg
Modulus of rigidity, G 11,5 psi e-6
Izod-notched-bar value 90 ft-lb
La geometría que representa la figura 3-5 de la probeta corresponde a una de las usadas por Gough en sus
ensayos. Se ha elegido esta por simpleza y, una vez más, porque el interés de determinar estos parámetros
viene de la necesidad de conocer su orden de magnitud, el cual, como resulta lógico, se asume invariable entre
las distintas probetas.
Para la rigidez a flexion: 𝐾𝑓𝑙𝑒𝑥 =𝑀
𝜃=
𝐸 𝐼
𝐿, siendo Iy la inercia de la sección.
En cuanto a la rigidez a torsión: 𝐾𝑡𝑜𝑟𝑠 =𝑀
𝜃=
𝐺 𝐽
𝐿, siendo J el módulo de torsión, que, para una sección
circular, como es el caso, coincidirá con el momento de inercia polar, o la suma de los momentos de inercia de
la sección.
Los valores son:
E7=2.006374e11 Pa
G7=79289708870 Pa
Rprob=0.0127/2 m
𝐼7, 𝑧 =1
4𝜋𝑅𝑝𝑟𝑜𝑏4
J7=2I7z 𝑚4
l7=0.03 m
𝐾𝑡𝑜𝑟𝑠 =𝐺7 𝐽7
𝑙7= 6.7501𝑒3
𝑁𝑚
𝑟𝑎𝑑
𝐾𝑓𝑙𝑒𝑥 =𝐸7 𝐼7𝑧
𝑙7= 8.5403𝑒3
𝑁𝑚
𝑟𝑎𝑑
𝐾1 =𝜃𝜋2
𝐾𝑡𝑜𝑟𝑠 +
𝜋2 − 𝜃
𝜋2
𝐾𝑓𝑙𝑒𝑥

Planteamiento Matemático
36
𝐾2 =𝜃𝜋2
𝐾𝑓𝑙𝑒𝑥 +
𝜋2 − 𝜃
𝜋2
𝐾𝑡𝑜𝑟𝑠
3.2.3 Ballestas
La deformada de las ballestas, como ya se dijo, se aproximará por medio de funciones de forma. En este
modelo, por simpleza y rapidez a la hora de computar los resultados, se usará una única función de forma para
la deformada, en concreto la de una viga empotrada rígidamente en un extremo y libre en el otro, bajo el efecto
de una carga en el extremo libre. Esta función de forma, cuyo cálculo queda determinado en [2], es:
𝜓(𝜂) =1
2(3
𝜂12
𝑙12 −
𝜂13
𝑙13 )
Para las propiedades de las ballestas, se toman valores estándar del módulo de Young para el acero al carbono
y se hace un cálculo de la inercia del perfil. El perfil es:
Figura 3-6: sección estimada de las ballestas
E1=2.1e11 Pa
b=0.04 m
h=0.015 m
r=0.081/2 m
𝐼1 = 2(𝑏ℎ4
12+ 𝑏ℎ𝑟2) = 1.9908𝑒 − 6 𝑚4
E2=E1;
I2=I1;.
3.2.4 Inercias
Además de los momentos de inercia de las ballestas, se necesita el momento de inercia de los discos que
soportan los rotores desequilibrados y los momentos de inercia de la barra superior en forma de T, cuya
velocidad angular tendrá dos componentes y, por ende, se necesitan dos inercias. Dichas inercias son:
𝐼𝑎 =1
3𝑀𝑙6
2 = 0.4058 𝑚4
𝐼𝑔 =1
2𝑀𝑟6
2 = 0.2511𝑒 − 4 𝑚4
Rdisco=0.15 m
𝑀𝑑𝑖𝑠𝑐𝑜 = 𝜋 𝑅𝑑𝑖𝑠𝑐𝑜2 0,005

𝐼𝑑 =1
2 𝑀𝑑𝑖𝑠𝑐𝑜 𝑅𝑑𝑖𝑠𝑐𝑜2 = 3.9761𝑒 − 6 𝑚4
3.3 Determinación del Lagrangiano
Para determinar las ecuaciones de movimiento se ha decidido utilizar un planteamiento por las ecuaciones de
Euler Lagrange, para el que necesitaremos varios elementos: las energías cinética y potencial, las fuerzas
generalizadas y las funciones de disipación de Rayleigh. En este apartado se discutirá el cálculo de los dos
primeros elementos.
3.3.1 Cinemática de los Centros de Gravedad del Sistema
Antes de entrar en el cálculo de T y V, resulta conveniente determinar la posición y velocidad de determinados
puntos del sistema, como los centros de gravedad de cada barra.
Para la posición de los centros de gravedad de cada barra se contempla únicamente su componente vertical, ya
que es la que tendrá efecto sobre la energía potencial asociada a la gravedad.
𝑥𝑐𝑔3 = 𝑥1 +𝑙32
𝑥𝑐𝑔4 = 𝑥2 +𝑙42
𝑥𝑐𝑔5 =𝑥1 + 𝑙3 + 𝑥2 + 𝑙4
2
𝑥𝑐𝑔6 =𝑥𝑐𝑔5 + 𝑙𝑝𝑟𝑖𝑛
2
En cuanto a las velocidades, se toman como el módulo de la derivada de la posición de los puntos en cuestión.
𝑣𝑐𝑔3 = �̇�1
𝑣𝑐𝑔4 = �̇�2
𝑣𝑐𝑔5 = √(�̇�1 + �̇�2)
2
𝑣𝑐𝑔6 =1
2𝑣𝑐𝑔5
𝑣𝑔𝑖𝑟𝑜 = �̇�6
𝑣𝜃,1 = √(−�̇�6 𝑅𝑑𝑖𝑠𝑐𝑜 sin(𝑥6))2 + (�̇�1 + �̇�6 𝑅𝑑𝑖𝑠𝑐𝑜 cos(𝑥6))
2
𝑣𝜃,2 = √(−�̇�6 𝑅𝑑𝑖𝑠𝑐𝑜 sin(𝑥6))2 + (�̇�2 + �̇�6 𝑅𝑑𝑖𝑠𝑐𝑜 cos(𝑥6))
2
El objeto de este sistema, como se ha comentado en varias ocasiones, es el de transmitir una carga cíclica,
tanto de torsión como de flexión a la probeta, así que el estudio de dos magnitudes en particular toma mucha
relevancia: estas son el ángulo alfa y gamma. Estos ángulos, que pueden verse representados para una mayor
aclaración en la figura 3-4, representan los dos posibles giros de la barra 5-6. Además, se calcula la velocidad
angular asociada a estos dos giros, que es de importancia para el cálculo de la energía potencial.

Planteamiento Matemático
38
𝛼 =𝑥𝑐𝑔5 − 𝑙𝑝𝑟𝑖𝑛
𝑙6
�̇� =𝑣𝑐𝑔5
𝑙6
𝛾 =𝑥1 − 𝑥2
𝑙5
�̇� =�̇�1 − 𝑥2̇
𝑙5
𝜔5−6 = [ �̇� �̇� 0 ]
3.3.2 Energías Cinética y Potencial
Con las magnitudes estudiadas en la subsección anterior se puede proceder al cálculo de las energías cinética y
potencial del sistema.
𝑇 =1
2𝜔5−6
𝑇 𝐼5−6 𝜔5−6 +1
2𝑚3𝑣𝑐𝑔3
2 +1
2𝑚4𝑣𝑐𝑔4
2 + +1
2𝑚𝜃𝑣𝜃,1
2 +1
2𝑚𝜃𝑣𝜃,2
2 +1
2𝐼𝑑𝑣𝑔𝑖𝑟𝑜
2 +1
2𝑚𝑑(�̇�1 + �̇�2)
+1
2
𝑚1
𝑙1 ∫ �̇�1
2 𝜓2(𝜂) 𝑑𝜂𝑙1
0
+1
2
𝑚2
𝑙2 ∫ �̇�2
2 𝜓2(𝜂) 𝑑𝜂𝑙2
0
𝑉 =1
2𝐾2𝛾
2 +1
2𝐾1𝛼
2 + 𝑚3𝑔𝑥𝑐𝑔3 + 𝑚4𝑔𝑥𝑐𝑔4 + 𝑚5𝑔𝑥𝑐𝑔5 + 𝑚6𝑔𝑥𝑐𝑔6 + 𝑚𝜃𝑔(𝑥1 + 𝑅𝑑𝑖𝑠𝑐𝑜𝑠𝑒𝑛 𝑥6)
+ 𝑚𝜃𝑔(𝑥2 + 𝑅𝑑𝑖𝑠𝑐𝑜𝑠𝑒𝑛 𝑥6) +1
2(𝑥1 − 𝑑1)∫ 𝐸1𝐼1𝜓
2(𝜂) 𝑑𝜂𝑙1
0
+1
2(𝑥2 − 𝑑2)∫ 𝐸2𝐼2𝜓
2(𝜂) 𝑑𝜂𝑙2
0
+ 𝑔𝑚1
𝑙1∫ 𝑥1
𝑙1
0
𝜓(𝜂) 𝑑𝜂 + 𝑔𝑚2
𝑙2∫ 𝑥2
𝑙2
0
𝜓(𝜂) 𝑑𝜂
Para modelar el efecto de las deflexiones iniciales, se considera un cambio en la posición de equilibrio de las
coordenadas 1 y 2 quedando estas de la forma que se aprecia en los términos de energía potencial elástica de
las ballestas.
3.4 Obtención de las Ecuaciones de Movimiento
Como se mencionó anteriormente, además de las energías cinética y potencial, se necesitan las fuerzas
generalizadas y las funciones de disipación de Rayleigh.
En cuanto a las primeras se tomarán dos escenarios posibles:
-El sistema se deja en vibración libre, para estudiar las posiciones de equilibrio, las frecuencias naturales y
otras propiedades, lo que conlleva un vector de fuerzas generalizadas nulo.
-El sistema está excitado por el rotor desequilibrado girando a una velocidad angular constante, por lo tanto,
imponemos un movimiento al x6, que estará provocado por una fuerza (en este caso, momento) en x6
desconocida. Así, el vector de fuerzas generalizadas queda nulo en sus dos primeros términos, asociados a x1 y
2, por no haber fuerzas aplicadas directamente sobre estos puntos, y una función incógnita como último
termino. Esta función incógnita representa el momento ejercido sobre el grado de libertad 6, que es el giro del
disco; es decir, Q6 es el momento que ejerce el motor síncrono para imponer una velocidad de giro constante.
Respecto a las funciones de disipación de Rayleigh, estas asociadas al amortiguamiento presente en la

estructura, no se tendrán aún en cuenta. Para determinar el amortiguamiento del sistema se hará a partir de la
relación de amortiguamiento, pues esta puede ser estimada con mayor facilidad. Así, para hallar los términos
referentes al amortiguamiento se debe acudir a la última subsección del capítulo, donde se estudian las
frecuencias naturales, pues será cuando se estudie el sistema en forma matricial.
Una vez tenidos en cuenta todos los términos anteriormente mencionados es hora de aplicar las ecuaciones de
Euler-Lagrange y hallar las ecuaciones de movimiento del sistema.
𝑑
𝑑𝑡(
𝑑𝐿
𝑑�̇�𝑗) −
𝑑𝐿
𝑑𝑞𝑗+
𝑑𝐹
𝑑�̇�𝑗− 𝑄𝑗 = 0
Los resultados obtenidos de la aplicación de Euler-Lagrange son las siguientes ecuaciones:
𝑚𝑡𝑒𝑡𝑎 (2 �̈�1 − 2 𝑅𝑑𝑖𝑠𝑐𝑜 𝜔2 sin(𝜔 𝑡))
2− 10 𝑚3 − 5 𝑚5 −
5 𝑚6
2− 10 𝑚𝑡𝑒𝑡𝑎 −
15 𝑚1
4+
33 𝑚1 �̈�1
35+ 𝑚3 �̈�1 + 𝑚𝑑 �̈�1
+ 𝐼𝑎 (
�̈�12
+�̈�22
)
2 162+
𝐼𝑔 (2 �̈�1 − 2 �̈�2)
2 152+
𝑘2 (2 𝑥1 − 2 𝑥2)
2 152+
𝑘1 (132
+ 142
− 𝑙𝑝𝑟𝑖𝑛 + 𝑥12
+ 𝑥22
)
2 162
− 33 𝐸1 𝐼1 𝑙1 (2 𝑑1 − 2 𝑥1)
280= 0
𝑚𝑡𝑒𝑡𝑎 (2 �̈�2 − 2 𝑅𝑑𝑖𝑠𝑐𝑜 𝜔2 sin(𝜔 𝑡))
2− 10 𝑚4 − 5 𝑚5 −
5 𝑚6
2− 10 𝑚𝑡𝑒𝑡𝑎 −
15 𝑚2
4+
33 𝑚2 �̈�2
35+ 𝑚4 �̈�2
+ 𝑚𝑑 �̈�2 + 𝐼𝑎 (
�̈�12
+�̈�22
)
2 162−
𝐼𝑔 (2 �̈�1 − 2 �̈�2)
2 152−
𝑘2 (2 𝑥1 − 2 𝑥2)
2 152
+ 𝑘1 (
132
+ 142
− 𝑙𝑝𝑟𝑖𝑛 + 𝑥12
+ 𝑥22
)
2 162 −
33 𝐸2 𝐼2 𝑙2 (2 𝑑2 − 2 𝑥2)
280= 0
En las que ya se ha hecho la siguiente sustitución:
𝑥6 = 𝜔 𝑡
𝑑𝑥6
𝑑𝑡= 𝜔
𝑑2𝑥6
𝑑𝑡2= 0
Como se ve en las ecuaciones, esto convierte los términos dependientes de x6 en la excitación del sistema,
pudiendo evaluar omega=0 para ver las vibraciones libres de los dos primeros grados de libertad.
3.5 Determinación del Centro de Percusión
Por la geometría del sistema estudiado, parece razonable pensar que, a la luz de la figura 3-7, se produzca un
cierto esfuerzo cortante en la probeta debido a la fuerza aplicada sobre la palanca y la geometría de esta.

Planteamiento Matemático
40
Figura 3-7: esquema de como la barra 6 transmite el momento a la probeta
De cara a producir unos valores fiables en los distintos ensayos de las probetas resulta de vital importancia
que, si se tiene un ensayo a flexión, torsión o mixto; se tenga estos esfuerzos sobre la probeta y nunca otros,
que provocarían una variación en el número de ciclos, tipo de rotura, y tensión real aplicada en cada ciclo.
Para cuantificar la aparición de esfuerzo cortante en la probeta, en el modelo matemático obtenido aquí se
pueden estudiar las reacciones que aparecen en el punto donde estaría la probeta. Una reacción vertical en este
punto no nula implicaría la aparición de un cierto esfuerzo cortante en la probeta.
Se sabe que, conectando las barras verticales y el travesaño en el centro de percusión de la barra 6, se
producirán esfuerzos cortantes nulos en la probeta, ya que una fuerza provocada en el centro de percusión de
un elemento que gira no provoca la aparición de fuerzas de reacción en el centro de giro.
Por tanto, ya que en la máquina se quiere evitar esto, se asume que esta consideración se tomó en el diseño y
las barras se conectan en el centro de percusión. Con lo cual l6 será aquella que cumpla la condición:
Equilibrio de fuerzas verticales:
∑𝐹𝑣 = 𝐹𝑟𝑜𝑡𝑜𝑟 + 𝐹𝑟𝑒𝑎𝑐𝑐𝑖ó𝑛 − 𝑚6𝑔 − 𝑚6
�̈�5𝐿6𝑡𝑜𝑡𝑎𝑙
2𝐿6 = 0
Se impone que la reacción sea igual a 0 y se obtiene:
𝐹𝑟𝑜𝑡𝑜𝑟 = 𝑚6𝑔 + 𝑚6
�̈�5𝐿6𝑡𝑜𝑡𝑎𝑙
2𝐿6 = 0
Del equilibrio de momentos respecto al eje perpendicular al papel se obtiene:
∑𝑀 = 𝐹𝑟𝑜𝑡𝑜𝑟𝑙6 − 𝑚6𝑔𝐿6𝑡𝑜𝑡𝑎𝑙
2−
𝐼𝑎�̈�5
𝑙6−
𝐾1𝑥5
𝑙6= 0
Aqui se sustituye Frotor por la obtenida anteriormente y, despejando, se obtiene:
𝐿6 =𝑚6𝑔
𝐿6𝑡𝑜𝑡𝑎𝑙2 +
𝐼𝑎�̈�5𝐿6
+ 𝐾1𝑥5𝑙6
𝑚6𝐿6𝑡𝑜𝑡𝑎𝑙
2�̈�5𝐿6
+ 𝑚6𝑔

𝐿6 =𝑔𝐿6𝑡𝑜𝑡𝑎𝑙
2𝑔 +�̈�5𝑙6
+𝐼𝑎
�̈�5𝑙6
𝑚 (𝑔 +�̈�5𝐿6𝑡𝑜𝑡𝑎𝑙
2𝑙6)
+𝐾1
𝑥5𝑙6
𝑚 (𝑔 +�̈�5𝐿6𝑡𝑜𝑡𝑎𝑙
2𝑙6)
X5pp se puede aproximar, por ser un mov armonico simple, como -X5w^2. La w se tomará del orden de 300
rad/s, lo que provocará que X5pp/l6 sea notablemente más elevado que el resto de términos, aun sin saber el
valor de la respuesta en X5. Luego, atendiendo al orden de magnitud de cada término, se puede concluir que
los términos 1 y 3 serán despreciables respecto al segundo, que consta de un término con X5pp en el
numerador. Así:
𝐿6 =𝐼𝑎
�̈�5𝑙6
𝑚(𝑔 +�̈�5𝐿6𝑡𝑜𝑡𝑎𝑙
2𝑙6)
De aquí se desprecia g frente a la magnitud del otro sumando, con lo cual se puede simplificar hasta:
𝐿6 =𝐼𝑎
𝑚6𝐿6𝑡𝑜𝑡𝑎𝑙
Con los valores numéricos anteriormente obtenidos se tiene una L6=0.2676 m respecto a los 0.402 m de la
barra en total, siendo en este caso aproximadamente 2/3 de la longitud total.
3.6 Determinación de las Frecuencias Naturales
El estudio de las frecuencias naturales de un sistema que vibra es siempre de vital importancia y, en este
sistema en particular, juega un papel aún más importante. La máquina está diseñada para ser un sistema
resonante, que vibre a frecuencias cercanas a la frecuencia natural, y así aprovechar las propiedades
amplificadoras de esta frecuencia.
Por tanto, en el cálculo de las frecuencias naturales se espera encontrar unas frecuencias naturales con valores
dentro del rango de frecuencias posibles de la excitación del sistema; esto es, la velocidad de giro del motor.
Así, una frecuencia natural de 100.000 rpm resultaría descabellada por la dificultad de excitar los rotores
desequilibrados a esta velocidad angular.
Igualmente, es interesante estudiar la dependencia a los parámetros de estas frecuencias naturales, para
entender su naturaleza o posibilidad de cambiar con las variaciones que el modelo pudiera sufrir.
El procedimiento que se sigue para estudiar dichas frecuencias comienza por el paso a un sistema de
ecuaciones en forma matricial:
[𝑀]�̈� + [𝐶]�̇� + [𝐾]𝑥 = 0
Así obtenemos las siguientes matrices K y M:
𝐾 =
[ 𝑘2
𝑙52 +
12𝑘1
2𝑙62 +
33
2802𝐸1𝐼1𝑙1
2𝑘2
2𝑙52 +
𝑘1
4𝑙52
2𝑘2
2𝑙52 +
𝑘1
4𝑙52
𝑘2
𝑙52 +
12𝑘1
2𝑙62 +
33
2802𝐸2𝐼2𝑙2
]
𝑀 =
[ 𝑚𝜃 + 𝑚3 + 𝑚𝑑 +
12 𝐼𝑎
2𝑙62 +
𝐼𝑔
𝑙52 +
33
35𝑙1
𝑚1
𝑙1
12 𝐼𝑎
2𝑙62 −
𝐼𝑔
𝑙52
12 𝐼𝑎
2𝑙62 −
𝐼𝑔
𝑙52 𝑚𝜃 + 𝑚4 + 𝑚𝑑 +
12 𝐼𝑎
2𝑙62 +
𝐼𝑔
𝑙52 +
33
35𝑙2
𝑚2
𝑙2 ]

Planteamiento Matemático
42
A continuación, con estas matrices obtenemos las frecuencias naturales como la solución al siguiente problema
de autovalores y autovectores:
|𝐾−1𝑀 − 𝜆𝐼| = 0
Siendo
𝜆 =1
𝑤𝑛2
Sin embargo, a partir de aquí el cálculo analítico se complica, por lo que se procede al cálculo numérico de las
frecuencias naturales usando los parámetros anteriormente dispuestos. Con esto obtenemos unas frecuencias
naturales y modos de vibración de la siguiente forma:
Frec1=106.1223 rad/s=1013.4 rpm modo1=[ 1 1 ]
Frec2= 178.4808 rad/s=1704.4 rpm modo2=[-1 1 ]
Los modos de vibración representan las deformadas que se ven la figura X, siendo estas respectivamente
asociadas a la posibilidad de una vibración simétrica o asimétrica.
Figura 3-8: Modos de vibración del sistema
Los valores obtenidos de las frecuencias naturales están dentro del rango de frecuencias corrientes de este tipo
de máquinas, con lo cual inicialmente se dará por correcto, a falta de estudiar su efecto en el modelo numérico
del siguiente capítulo. La frecuencia más interesante es la primera por corresponder al modo de vibración al
que se sabe que vibrará el sistema mayoritariamente.
Aunque el valor analítico de las frecuencias naturales y modos no se puede estudiar, se puede analizar la
dependencia a partir del análisis de las matrices. De esta forma, se puede concluir que las frecuencias naturales
no dependerán de las deflexiones iniciales, mientras que dependerán fuertemente de las rigideces de los
muelles que simulan la probeta. Esto puede resultar inconveniente pues diferentes probetas implican diferentes
rigideces y, por ende, diferentes frecuencias naturales. De igual manera pasará con diferentes titas. Sin
embargo, como se ha dicho, el punto de funcionamiento de la maquina pretende ser en resonancia, cercano a la
frecuencia natural. En ningún momento se especifica que deba ser exactamente a la frecuencia natural, es más,
esto podría no ser conveniente porque el sistema amplificara descontroladamente la entrada produciendo
tensiones en la probeta demasiado elevadas o incluso perjuicios al sistema o su sistema de suspensión.
Calculando las frecuencias naturales de manera análoga a la hecha en este apartado, se pueden tomar
diferentes valores de las rigideces y estudiar su valor. Tras las pruebas de varios valores obtenemos:
-Con una rigidez k1 y 2 100 veces mayor: 0.83e3 y 1.55e3
-Con una rigidez diez veces menor: 76.47rad/s y 86.48rad/s
Así, se concluye que las frecuencias naturales son proporcionales a las rigideces de las probetas, dato que será
de utilidad para, al hacer ensayos con diferentes probetas, asegurarse de estar en el entorno del punto de
funcionamiento ideal.
En este punto se retoma el cálculo de los términos relativos al amortiguamiento del sistema, estimando una

relación de amortiguamiento y partiendo de las matrices y los modos hallados.
Con los modos obtenidos podemos construir una matriz modal siguiendo la transformación a coordenadas
modales que consigue diagonalizar las matrices de masa y rigidez. Esta es:
𝜙 = [−1 11 1
]
𝐾𝑚𝑜𝑑𝑎𝑙 = 1𝑒5 [5,9113 0
0 2,7268]
𝑀𝑚𝑜𝑑𝑎𝑙 = [18,5566 0
0 24,2128]
A partir de estas matrices y de la definición de relación de amortiguamiento podemos obtener los valores de la
matriz de coeficientes de amortiguamiento en coordenadas modales:
𝜉 =𝐶𝑗
2𝑀𝑗√𝐾𝑗
𝑀𝑗
La relación de amortiguamiento es un valor a determinar en futuros ensayos experimentales de la maquina. En
este trabajo, por simpleza y por intentar estar en el orden de magnitud acertado, se tomará una relación de
amortiguamiento del 1%, es decir, eps=0.01. Con esto, obtenemos una matriz en coordenadas modales:
𝐶𝑚𝑜𝑑𝑎𝑙 = [66,2401 0
0 51,3904]
Usando la transformación siguiente se consigue los coeficientes de la matriz en el sistema de coordenadas
inicial. Estos coeficientes se añadirán a las ecuaciones de movimiento para obtener la respuesta del sistema
amortiguado.
𝐶 = [𝜙𝑇]−1𝐶𝑚𝑜𝑑𝑎𝑙 𝜙−1
𝐶 = [29,4076 −3,7124−3,7124 29,4076
]

Planteamiento Matemático
44
4 RESOLUCIÓN EN MATLAB®
ste capítulo trata la resolución del sistema de ecuaciones diferenciales no lineales anteriormente
presentado y el posterior procesado de sus resultados. El objetivo de este capítulo es conseguir
soluciones que sean lo más ajustadas posible a las del sistema, así como dar a entender el procedimiento
usado.
4.1 Secciones
Como ya se ha mencionado en varias ocasiones, el software elegido para la resolución del sistema es
MATLAB®®, por disponer de herramientas útiles para este tipo de problemas, como luego se discutirá; y por
ser el software con el que más se trabaja en el grado.
4.1.1 Subsección
Ya dentro del MATLAB®®, se debe elegir uno de los solvers de ODE (ordinary differential equation, o
ecuación diferencial ordinaria) disponibles, los cuales resuelven las ecuaciones diferenciales de manera
iterativa empezando por el estado determinado por las condiciones iniciales, que deben ser dadas. Además de
dichas condiciones, un periodo de tiempo es proporcionado en forma de vector de dos componentes: inicio y
fin. A partir de aquí, MATLAB® resuelve el sistema de ecuaciones diferenciales como un Problema de Valor
Inicial (PVI).
De los solvers propuestos por MATLAB® se usará el comando ode45, ya que “funciona bien con la mayoría
de problemas de ecuaciones diferenciales ordinarias y, generalmente, debe ser la primera opción para elegir
solver” [5]. De encontrar potenciales errores numéricos o síntomas de que el método resolutivo no es eficiente
se barajará el uso de otros solvers, de lo contrario no.
Los solvers de MATLAB® únicamente resuelven ecuaciones diferenciales de primer orden [5]. Así, ya que las
ecuaciones deberán ser de orden 1 nos vemos obligados a reescribirlas añadiendo variables intermedias de la
forma:
𝑌1 = 𝑦
𝑌2 = �̇�
Este algoritmo está implementado en MATLAB®® a través de la función:
[A,B]=odeToVectorField(eqn)
Este comando aplica el algoritmo anterior a las ecuaciones dadas como argumento que, en nuestro caso, están
escritas en variables simbólicas; y devuelve en A el lado derecho de las ecuaciones anteriormente expuestas y
en B el lado izquierdo, útil para ver las sustituciones que hace el programa. El comando odeToVectorField
E

Resolución en MATLAB®
46
reconoce las variables simbólicas y sus distintas derivadas, mediante la nomenclatura:
x o cualquier nombre- variable
Dx- derivada primera de la variable con respecto a t
D2x-derivada segunda de la variable con respecto a t
Asume, si no se le especifica lo contrario, que la variable independiente es t. Así, se debe tener especial
cuidado al nombrar las variables que usaremos para el argumento de esta operación, evitando siempre el uso
de palabras que empiecen por D.
Por último, para tener unas ecuaciones capaces de ser argumento del ODE solver, se necesita transformar el
sistema escrito en variables simbólicas en una función de MATLAB®®. Esto se puede conseguir de forma
automática a través del comando:
g=MATLAB®function(eqn)
Que devuelve el sistema de ecuaciones almacenado como una función de MATLAB® en la variable g, siendo
“g” asimismo el nombre de la función. Además de pasar como argumento el sistema de ecuaciones se pueden
elegir opciones adicionales expresadas como pareja de argumentos, como:
g=MATLAB®function(eqn,’File’,’mifuncion’)
Esta opción “File” devuelve la función almacenada en la variable g y además crea un fichero .m en el que
almacena la función con el nombre “mifuncion.m”, como se ha especificado en el tercer argumento. Del resto
de funciones posibles, para este código se usará la opción ‘Vars’ para especificar el orden de los argumentos
de entrada para la función de MATLAB® generada.
Con la función, las opciones de ode45 elegidas y los valores iniciales determinados solo se necesita el período
de tiempo en el que resolver el sistema, que se determinará por prueba y error viendo los resultados. El
objetivo es que quede lo suficientemente establecido el régimen permanente como para ver la amplitud
frecuencia y posición de equilibrio del movimiento de los distintos grados de libertad. Para ello se observará la
duración del régimen transitorio causado por la amortiguación y la posición inicial distinta de la posición de
equilibrio, y se añadirán unos segundos para ver los resultados.
4.1.2 Programa
El siguiente código incluye también el empleado para determinar las ecuaciones movimiento de forma
simbólica. Esto, además de salvar una considerable cantidad de tiempo, permite al usuario que use el siguiente
programa ajustar a su antojo los parámetros y obtener los resultados, de la misma manera que haría con la
máquina real. Es de vital importancia para el entendimiento del funcionamiento de la máquina poder obtener,
de forma simple, la solución para diferentes titas, w y deflexiones iniciales.
Los programas creados son 3: para calcular la frecuencia natural, para calcular las ecuaciones de movimiento
y, el principal, para calcular la respuesta del sistema. Aquí solo se añade el principal, estando los otros dos
disponibles como anexo.
clear
clc
% NOMENCLATURA VARIABLES
% p es punto pp doble punto
syms x1 x1p x1pp x2 x2p x2pp x6 x6p x6pp
% DEFINO NUESTRO SISTEMA
omega=300;

c=30;
d1=0.01;
d2=0.005;
tita=pi/3;
dens=7860; %kg/metros cubicos
% l1=4.5*11.502e-2;
% l2=l1;
% lprin=2.7*11.502e-2;
% l3=2.7*11.502e-2;
% l4=2.7*11.502e-2;
% l5=2.7*11.502e-2;
% l6=3.5*11.502e-2; %total
l1=0.5176;
l2=l1;
lprin=0.3106;
l3=0.3106;
l4=0.3106;
l5=0.3106;
l6=0.2676; %total=0.4026
v1=2*l1*0.01*0.04; %metros cubicos
v2=v1;
v3=l3*pi*0.012^4;
v4=v3;
v5=l5*0.0575*0.0345;
v6=0.4026*0.0805*0.0345;
m1=dens*v1;
m2=m1;
m3=dens*v3;
m4=m3;
m5=dens*v5;

Resolución en MATLAB®
48
m6=dens*v6;
md=5;
Ig=(1/3)*m6*0.01^2;
Ia=(1/3)*m6*0.402^2;
Rdisco=0.15;
mdisco=pi*Rdisco^2*0.005;
Id=(1/2)*mdisco*Rdisco^2;
mteta=0.1; %variable
E7=2.006374e11;
G7=79289708870;
Rprob=0.0127/2;
I7z=(1/4)*pi*Rprob^4;
J7=2*I7z;
l7=0.03;
ktors=G7*J7/l7;
kflex=E7*I7z/l7;
k1=(tita/(pi/2))*ktors+((pi/2)-tita/(pi/2))*kflex;
k2=(tita/(pi/2))*kflex+((pi/2)-tita/(pi/2))*ktors;
E1=2.1e11;
b=0.04;
h=0.015;
r=0.081/2;
I1=2*(((b*h^3)/12)+b*h*r^2);
E2=E1;
I2=I1;
% POSICIONES IMPORTANTES
xcg3=x1+(l3/2);
xcg4=x2+(l4/2);
xcg5=((x1+l3)+(x2+l4))/2;
xcg6=(xcg5+lprin)*0.5; %el 0.5 es porque doy por hecho que es la mitad(X)
vcg3=x1p;
vcg4=x2p;

vcg5=((x1p+x2p)/2);
vcg6=0.5*vcg5;
alfa=(xcg5-lprin)/l6;
alfap=vcg5/l6;
gamma=(x1-x2)/l5;
gammap=((x1p-x2p)/l5);
vgiro=x6p;
vteta=(-x6p*Rdisco*sin(x6))^2+(x1p+x6p*Rdisco*cos(x6))^2;
vteta2=(-x6p*Rdisco*sin(x6))^2+(x2p+x6p*Rdisco*cos(x6))^2;
w5_6=[gammap,alfap,0];
w5_6t=[gammap;alfap;0];
I5_6=[Ig,0,0;0,Ia,0;0,0,0];
syms n1 n2
g=-10;
T=0.5*w5_6*I5_6*w5_6t+0.5*m3*vcg3^2+0.5*m4*vcg4^2+0.5*md*(x1p^2+x2p^2)+0.5*Id*x6
p^2+0.5*(mteta)*vteta+0.5*mteta*vteta2+0.5*(m1/l1)*int((x1p*(3*(n1^2/l1^2)-
n1^3/l1^3))^2,n1,0,l1)+0.5*(m2/l2)*int((x2p*(3*(n2^2/l2^2)-
n2^3/l2^3))^2,n2,0,l2);
V=k2*0.5*gamma^2+k1*0.5*alfa^2+m3*g*(xcg3)+g*m4*xcg4+g*m5*xcg5+g*m6*xcg6+g*mteta
*(x1+Rdisco*sin(x6))+g*mteta*(x2+Rdisco*sin(x6))+0.5*(x2-
d2)^2*int(E2*I2*(0.5*(3*(n2^2/l2^2)-n2^3/l2^3))^2,n2,0,l2)+0.5*(x1-
d1)^2*int(E1*I1*(0.5*(3*(n1^2/l1^2)-
n1^3/l1^3))^2,n1,0,l1)+g*(m1/l1)*int(x1*(0.5*(3*(n1^2/l1^2)-
n1^3/l1^3)),n1,0,l1)+g*(m2/l2)*int(x2*(0.5*(3*(n2^2/l2^2)-n2^3/l2^3)),n2,0,l2);
L=T-V;
%DEFINO FUERZAS GENERALIZADAS
Q1=0;
Q2=0;
Q3=0;
Q4=0;
% syms Q6
Q6=0;
%DEFINO FUNCIONES DE DISIPACION

Resolución en MATLAB®
50
dis1=0;
dis2=0;
dis3=0;
dis4=0;
dis6=0;
%MONTO LAS ECUACIONES
ec1_1=diff(L,x1p);
ec1_2=-diff(L,x1)+diff(dis1,x1p)-Q1;
ec2_1=diff(L,x2p);
ec2_2=-diff(L,x2)+diff(dis2,x2p)-Q2;
ec6_1=diff(L,x6p);
ec6_2=-diff(L,x6)+diff(dis6,x6p)-Q6;
trozos_eq_var=[ec1_1,ec1_2,ec2_1,ec2_2,ec6_1,ec6_2];
%PASO A FUNCIONES SIMBOLICAS
syms f1(t) f2(t) f6(t)
trozos_eq_fun=subs(trozos_eq_var,{x1,x2,x6,x1p,x2p,x6p,x1pp,x2pp,x6pp},{'f1(t)',
'f2(t)','f6(t)','D(f1)(t)','D(f2)(t)','D(f6)(t)','D(D(f1))(t)','D(D(f2))(t)','D(
D(f6))(t)'});
dec1=diff(trozos_eq_fun(1),t)+trozos_eq_fun(2);
dec2=diff(trozos_eq_fun(3),t)+trozos_eq_fun(4);
dec6=diff(trozos_eq_fun(5),t)+trozos_eq_fun(6);
ecuaciones_convariables=[dec1,dec2,dec6];
%CONVIERTO LOS TERMINOS A LA NOMENCLATURA DE odeToVectorField
syms Df1(t) Df2(t) Df6(t) D2f1(t) D2f2(t) D2f6(t)
ecuaciones_confunciones_casi=subs(ecuaciones_convariables,{'diff(D(f1)(t),t)','d
iff(D(f2)(t),t)','diff(D(f6)(t),t)'},[D2f1(t),D2f2(t),D2f6(t)]);
ecuaciones_confunciones=subs(ecuaciones_confunciones_casi,{'D(f1)(t)','D(f2)(t)'
,'D(f6)(t)'},[Df1(t),Df2(t),Df6(t)]);
ecuaciones_contetaresuelto=subs(ecuaciones_confunciones,{f6,Df6,D2f6},[omega*t,o
mega,0]);
C=[29.4076 -3.7124;-3.7124 29.4076];
ecuaciones_conamor=[ecuaciones_contetaresuelto(1)+C(1,1)*Df1+C(1,2)*Df2;ecuacion
es_contetaresuelto(2)+C(2,1)*Df1+C(2,2)*Df2];
%RESUELVO
[A,B]=odeToVectorField(ecuaciones_conamor);
M=MATLAB®Function(A,'vars',{'t','Y'});
auxi=zeros(1,4);
sol_numerica=ode45(M,[0 25],auxi);
% plot
figure(1)
for i=1:4
s(i)=subplot(2,2,i);
plot(sol_numerica.x,sol_numerica.y(i,:))
grid
end
B
figure(2)
sol_alfa=((0.5.*(sol_numerica.y(1,:)+l3+sol_numerica.y(3,:)+l4)-lprin)./l6);
plot(sol_numerica.x,sol_alfa)
title('Alfa (en rad)')
grid
figure(3)
sol_gamma=((-sol_numerica.y(1,:)+sol_numerica.y(3,:))/l5);
plot(sol_numerica.x,sol_gamma)
title('Gamma (en rad)')
grid
figure(4)
plot(sol_numerica.x,sol_numerica.y(3,:))
title('x1 (en m)')
grid
figure(5)
plot(sol_numerica.x,sol_numerica.y(1,:))

Resolución en MATLAB®
52
title('x2 (en m)')
grid
figure(6)
plot(sol_numerica.x,sol_alfa*k1)
title('Momento en Alfa (en Nm)')
grid
figure(7)
plot(sol_numerica.x,sol_gamma*k2)
title('Momento en Gamma (en Nm)')
grid
De cara a simplificar las derivadas temporales también se pueden declarar funciones simbólicas dependientes
de t que representarán los distintos gdl; sin embargo, la versión de MATLAB® usada (r2012a) no es capaz de
derivar respecto a una función, únicamente respecto a variables. De ahí surge la necesidad de la función subs.
Mediante esta función, se especifica una expresión simbólica, un término a sustituir y el nuevo término. Así, se
pasará de variable simbólica a función simbólica a antojo del usuario, usando la nomenclatura “x” para la
variable y “f” para la función.
Además, la función subs se usará para traducir la nomenclatura proveniente de las derivadas temporales, que
será del tipo D(f1)(t), a la nomenclatura aceptada por odeToVectorField, que será Df1(t).
4.2 Tratamiento de los resultados
El output de ode45 es una variable tipo “struct” en la que se almacena, si no se ha especificado ninguna opción
adicional, como es el caso:
Tabla 3-2: composición del struct resultado de ode45
Nombre de la variable Contenido
sol.x Vector de tiempos determinado por el solver
sol.y Matriz con las soluciones (por columna)
sol.solver Solver elegido para la resolción
Con el vector de tiempos y las soluciones para los grados de libertad x1 y x2 se pueden representar
gráficamente las posiciones y velocidades de estos dos puntos, así como, de manera análoga a la presentada en
el apartado 2.3.1, se pueden obtener los valores de alfa y gamma en función del tiempo.
Además, mediante el modelo matemático considerado podemos determinar los valores que tomarán las fuerzas
ejercidas sobre la probeta, mediante, simplemente, la ecuación que relaciona fuerza y desplazamiento en un
muelle.
𝑀𝛼,𝛾 = 𝛼, 𝛾 𝐾1,2
Los resultados que se espera obtener, previo a ninguna simulación, del sistema consisten en movimientos
oscilatorios de cada grado de libertad y, por ende, de alfa y gamma; con una amplitud constante en régimen
permanente, y de valores pequeños, como se consideró al tomar la simplificación de pequeños

desplazamientos.
La representación de las distintas variables frente al tiempo son objeto del siguiente capítulo, para contemplar
con más perspectiva los resultados y corroborar lo esperado.

Resolución en MATLAB®
54
5 RESULTADOS DE LAS SIMULACIONES
os resultados aquí presentados corresponden a los de la simulación numérica, los cuales se comparan
con los valores y consideraciones tomadas en el planteamiento matemático. Así, se presentarán
respuesta de los grados de libertad, alfa y gamma ante vibración libre y omega constante. La omega
constante toma valores normales y valores para que el sistema entre en resonancia, para discutir la magnitud de
los efectos de la frecuencia natural.
En todos los experimentos a continuación se toma una tita=pi/3 como un valor cualquiera entre 0 y pi/2.
Para las simulaciones se tendrá en cuenta el caso asimétrico del sistema, con unas deflexiones distintas e
iguales a:
D1=0.01 m
D2=0.005 m
Al final del capítulo se discutirá el efecto de los casos simétrico y la inclusión de distintos elementos de
asimetría.
5.1 Respuesta en Vibración Libre
Ya que el sistema bajo estudio está amortiguado, la respuesta que se espera es un movimiento oscilatorio
exponencialmente decreciente típico, provocado por una perturbación inicial al tener una posición inicial
distinta a la de equilibrio. De esta simulación se obtendrá, además del valor de dichas posiciones de equilibrio
de cada gdl, una primera comprobación de la validez y las consideraciones del modelo, como la de pequeños
desplazamientos.
L
Resultados de las Simulaciones
56
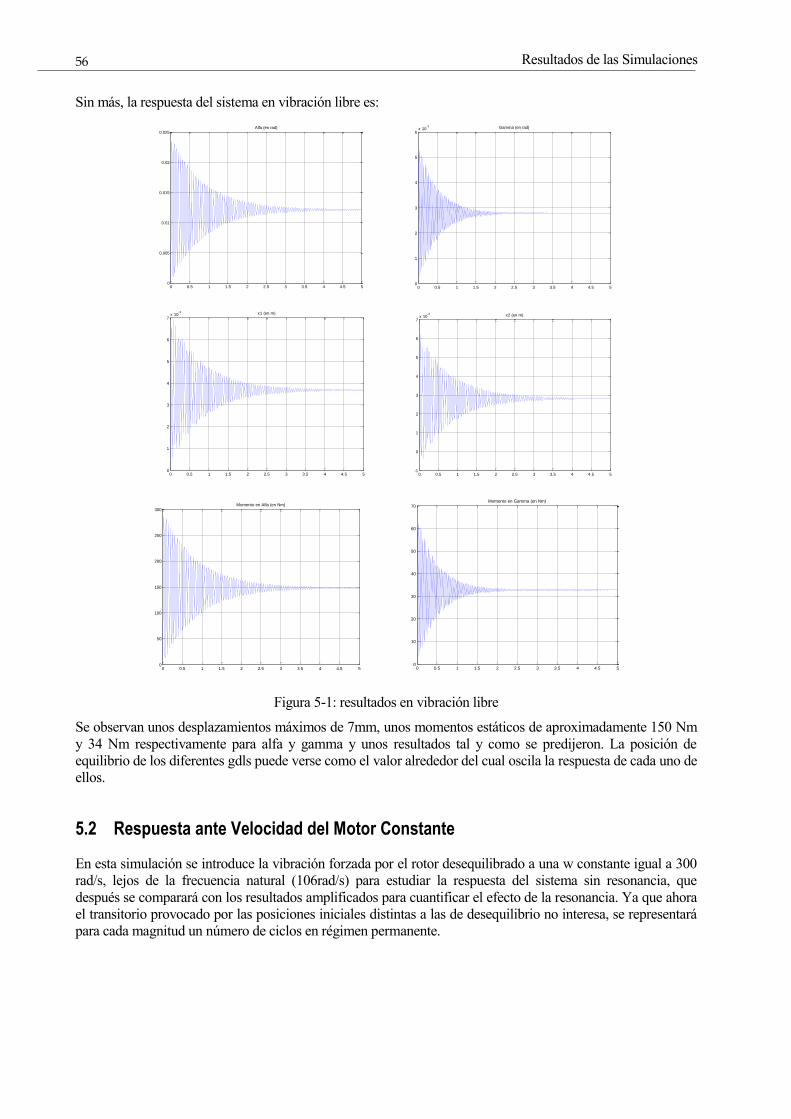
Sin más, la respuesta del sistema en vibración libre es:
Figura 5-1: resultados en vibración libre
Se observan unos desplazamientos máximos de 7mm, unos momentos estáticos de aproximadamente 150 Nm
y 34 Nm respectivamente para alfa y gamma y unos resultados tal y como se predijeron. La posición de
equilibrio de los diferentes gdls puede verse como el valor alrededor del cual oscila la respuesta de cada uno de
ellos.
5.2 Respuesta ante Velocidad del Motor Constante
En esta simulación se introduce la vibración forzada por el rotor desequilibrado a una w constante igual a 300
rad/s, lejos de la frecuencia natural (106rad/s) para estudiar la respuesta del sistema sin resonancia, que
después se comparará con los resultados amplificados para cuantificar el efecto de la resonancia. Ya que ahora
el transitorio provocado por las posiciones iniciales distintas a las de desequilibrio no interesa, se representará
para cada magnitud un número de ciclos en régimen permanente.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.005
0.01
0.015
0.02
0.025Alfa (en rad)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6x 10
-3 Gamma (en rad)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
7x 10
-3 x1 (en m)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
0
1
2
3
4
5
6
7x 10
-3 x2 (en m)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
50
100
150
200
250
300Momento en Alfa (en Nm)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
10
20
30
40
50
60
70Momento en Gamma (en Nm)
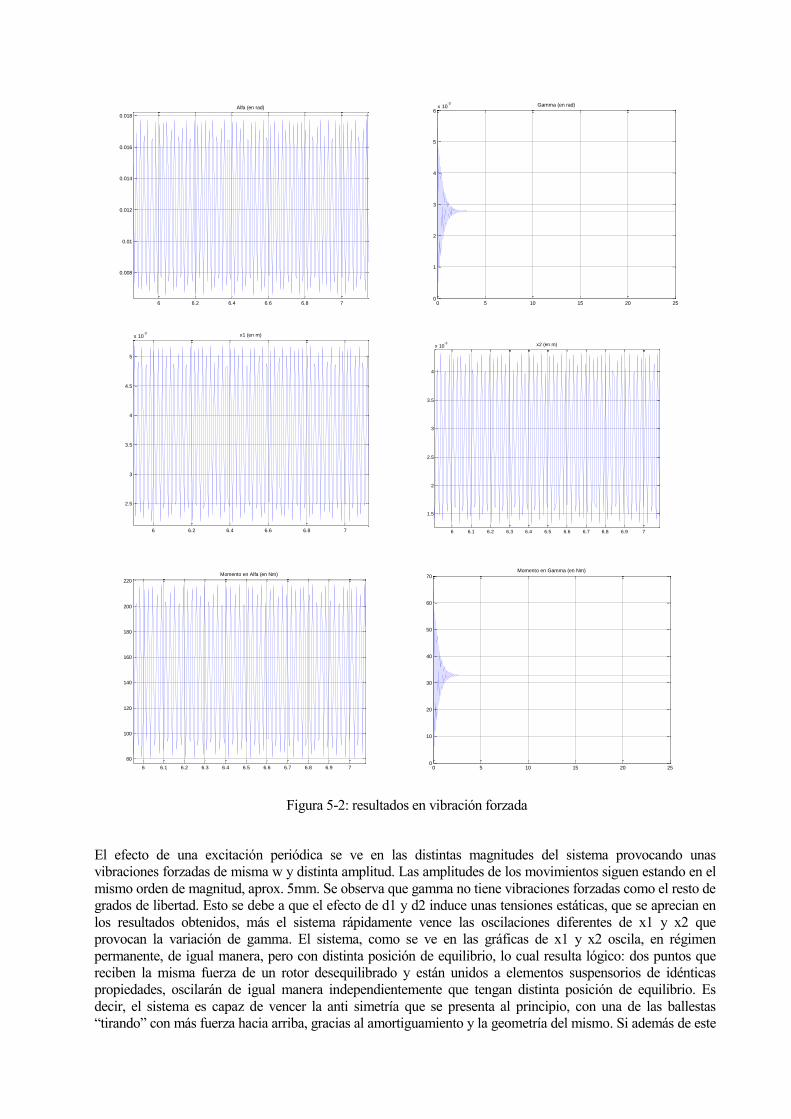
Figura 5-2: resultados en vibración forzada
El efecto de una excitación periódica se ve en las distintas magnitudes del sistema provocando unas
vibraciones forzadas de misma w y distinta amplitud. Las amplitudes de los movimientos siguen estando en el
mismo orden de magnitud, aprox. 5mm. Se observa que gamma no tiene vibraciones forzadas como el resto de
grados de libertad. Esto se debe a que el efecto de d1 y d2 induce unas tensiones estáticas, que se aprecian en
los resultados obtenidos, más el sistema rápidamente vence las oscilaciones diferentes de x1 y x2 que
provocan la variación de gamma. El sistema, como se ve en las gráficas de x1 y x2 oscila, en régimen
permanente, de igual manera, pero con distinta posición de equilibrio, lo cual resulta lógico: dos puntos que
reciben la misma fuerza de un rotor desequilibrado y están unidos a elementos suspensorios de idénticas
propiedades, oscilarán de igual manera independientemente que tengan distinta posición de equilibrio. Es
decir, el sistema es capaz de vencer la anti simetría que se presenta al principio, con una de las ballestas
“tirando” con más fuerza hacia arriba, gracias al amortiguamiento y la geometría del mismo. Si además de este
6 6.2 6.4 6.6 6.8 7
0.008
0.01
0.012
0.014
0.016
0.018
Alfa (en rad)
0 5 10 15 20 250
1
2
3
4
5
6x 10
-3 Gamma (en rad)
6 6.2 6.4 6.6 6.8 7
2.5
3
3.5
4
4.5
5
x 10-3 x1 (en m)
6 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 6.9 7
1.5
2
2.5
3
3.5
4
x 10-3 x2 (en m)
6 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 6.9 7
80
100
120
140
160
180
200
220
Momento en Alfa (en Nm)
0 5 10 15 20 250
10
20
30
40
50
60
70Momento en Gamma (en Nm)

Resultados de las Simulaciones
58
esfuerzo estático en gamma quisiera imponerse uno cíclico se podría optar por varias opciones que se
discutirán más adelante.
El ciclo de carga al que se ve sometido alfa es: 150 ±60 Nm
5.3 Efecto de la Frecuencia Natural
Para intentar cuantificar el efecto de la resonancia en el sistema la siguiente simulación se hará con una
frecuencia igual a la primera frecuencia natural, aquella asociada al modo [1 1], la cual tiene un valor de
aproximadamente 106 rad/s. La amplificación que se observa está altamente condicionada por la relación de
amortiguamiento, que se estimó anteriormente en un 1%. Esta relación de amortiguamiento, probablemente
mayor que la del sistema real, representa una amortiguación mayor y, como consecuencia, una amplificación
menor que la se encontraría en el sistema real.
A la luz de este previo análisis, los resultados son:
Figura 5-3: resultados en resonancia
En cuanto a gamma, encontramos resultados idénticos, por motivos idénticos. Para el resto de valores, el
efecto de la resonancia resulta evidente. Por cuantificar esto, el ciclo de carga al que se ve sometido alfa es de
150 ±900 Nm, frente a los 60 Nm que antes encontrábamos con 300 rad/s, un 1500% más alto. El valor de la
carga estática se mantiene pues, como se comentó con anterioridad y como se comenta en [1] esto depende
6 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 6.9 7
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Alfa (en rad)
0 5 10 15 20 250
1
2
3
4
5
6x 10
-3 Gamma (en rad)
6 6.2 6.4 6.6 6.8 7
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
x1 (en m)
6 6.2 6.4 6.6 6.8 7
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
x2 (en m)
6 6.2 6.4 6.6 6.8 7
-800
-600
-400
-200
0
200
400
600
800
1000
Momento en Alfa (en Nm)
0 5 10 15 20 250
10
20
30
40
50
60
70Momento en Gamma (en Nm)

únicamente de las deflexiones, que se han mantenido constantes durante todas las simulaciones. Los
desplazamientos de x1 y 2, aunque notablemente mayores, siguen siendo relativamente pequeños respecto a
las magnitudes del sistema: 2cm de amplitud.
Queda patente con esto, como una menor solicitación al motor y menores masas desequilibradas, en
resonancia, podrían provocar efectos de magnitudes considerables, lo cual resulta realmente conveniente.

Resultados de las Simulaciones
60

6 CONCLUSIONES
n este trabajo de fin de grado se ha propuesto un modelo matemático para la maquina descrita en el
artículo “Engineering Steels Under Combined Cyclic and Static Stresses”, por H.J. Gough para el
“Journal of Applied Mechanics” en junio, 1950 [1].
El modelo propuesto contempla los cambios ante los posibles estimulos descritos por Gough: ciclos de carga
producidos por un rotor desequilibrado a velocidad constante, la posibilidad de imponer unas deflexiones
iniciales capaces de controlar las tensiones estáticas, las variaciones del setting angle y, con él, las de las
rigideces afrontadas y el funcionamiento en resonancia dentro de un rango de revoluciones.
En cuanto al cálculo de las frecuencias naturales, se estudia su valor para unas condiciones y la dependencia de
esta a posibles magnitudes variables. Se obtienen, además, el valor de los modos que corroboran las posibles
vibraciones contempladas en el planteamiento matemático del sistema. Así, se determina que las deflexiones,
las cuales están sujetas a la conveniencia de cada ensayo, no juegan ningún papel en la determinación de las
frecuencias naturales, mientras que la rigidez de la probeta sí. Ya que, a través de la resonancia de la maquina
se pueden conseguir ciclos de carga elevados con pocas solicitaciones al motor, resulta de vital importancia
trabajar en un régimen cercano al de la frecuencia natural. Como la rigidez de la probeta varía el valor de esta
frecuencia natural, se estudia como varían esta respecto a las rigideces, concluyendo que son directamente
proporcionales. En cualquier caso, a partir de los códigos de MATLAB® proporcionados se pueden calcular
las frecuencias naturales para unas rigideces dadas.
El estudio del centro de percusión de la barra encargada de transmitir el momento a la probeta determina el
valor correcto de la longitud de la barra para evitar reacciones en el centro de giro, es decir, en la probeta. Esto
es de vital importancia para determinar la longitud l6 que aparecerá en las ecuaciones de movimiento que, de
no haber estudiado este fenómeno, no representaría con fidelidad el comportamiento de la máquina, pues
estaría permitiendo la aparición de un cortante en la probeta. La longitud obtenida es aproximadamente 2/3 de
la longitud total de la barra.
Además, este modelo se ha conseguido implementar en MATLAB® y simular, corroborando la elección de
pequeñas deformaciones y devolviendo resultados dentro de lo normal del comportamiento de la máquina. A
través de estas simulaciones, se ha podido estudiar el comportamiento del ángulo gamma, el cual responde a
no simetrías en el sistema y que, gracias al amortiguamiento y la configuración del sistema, consigue vencer
un escenario de cargas asimétricas, permitiendo a la vibración subsiguiente ser simétrica.
Como posible variación del comportamiento de la máquina, se propone el uso de distintas masas para los
discos del rotor desequilibrado, basado en el croquis que da a entender que se tienen dos discos uno a cada
lado. Sin embargo, cuando en el documento se describe la máquina se habla de masa del rotor desequilibrado
W, sin hacer distinción a la de un lado en particular. Con las deflexiones, por ejemplo, si deja claro que son
“independientes”.
Estas distintas masas provocarían que el sistema, ahora de forma permanente, vibrara por el efecto del motor,
pero añadiría esfuerzos mayores en las barras que componen la máquina, lo que podría hacer inviable esta
E

Conclusiones
62
variación.
Figura 6-1: sistema de rotores desequilibrados
Se introduce el cambio en el modelo de las simulaciones y se comprueba el efecto de sustituir la masa del lado
de x1 a la mitad, para omega=300:
Figura 6-2: respuesta con discos con distintas masas
Como se observa, ahora se tienen ciclos de carga tanto en alfa como en gamma, siendo estos de valor:
6 6.2 6.4 6.6 6.8 7
0.008
0.009
0.01
0.011
0.012
0.013
0.014
0.015
0.016
Alfa (en rad)
6 6.2 6.4 6.6 6.8 7
-2
-1
0
1
2
3
4
5
6
7
x 10-3 Gamma (en rad)
6 6.2 6.4 6.6 6.8 7
3.3
3.4
3.5
3.6
3.7
3.8
3.9
4
x 10-3 x1 (en m)
6 6.2 6.4 6.6 6.8 7
1
1.5
2
2.5
3
3.5
4
4.5
x 10-3 x2 (en m)
6 6.2 6.4 6.6 6.8 7
100
110
120
130
140
150
160
170
180
190
200
Momento en Alfa (en Nm)
6 6.2 6.4 6.6 6.8 7
-20
0
20
40
60
80
Momento en Gamma (en Nm)

63 Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante
Carga alfa= 150±50Nm
Carga gamma=34±55Nm
Así, se deja al lector con un modelo matemático implementado en MATLAB® y explicado en detalle en el
documento que, a fin de ser afinado a través de la experimentación con el sistema real, arrojará resultados
útiles del sistema real, imprescindibles para un funcionamiento de la máquina correcto y, sobretodo, eficiente.


REFERENCIAS
[1] H.J. Gough, «Engineering Steels Under Combined Cyclic and Static Stresses» Artículo para "Journal of
Applied Mechanics", Junio, 1950.
[2] Dominguez Abascal, Jaime, Mayo Nuñez, Juana, «Tecnología de Máquinas: Teoría,» Apuntes.
[3] J.J. Xiong, R.A. Shenon, «Fatigue and Fracture Reliability Engineering» Libro, Springer, 2011.
[4] Online Materials Information Resource - MatWeb . 2016. [ONLINE] Disponible en:
http://www.matweb.com/index.aspx. [Accedido 12 Agosto 2016].
[5] Choose an ODE Solver - MATLAB® & Simulink - MathWorks España. 2016. [ONLINE] Disponible en:
http://es.mathworks.com/help/MATLAB®/math/choose-an-ode-solver.html. [Accedido 19 Agosto 2016].

Referencias
66
66

67 Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante

Anexos
68
68
ANEXOS
Programa para el cálculo de las ecuaciones con parámetros:
clear
clc
% NOMENCLATURA VARIABLES
% p es punto pp doble punto
syms x1 x1p x1pp x2 x2p x2pp
syms x3 x3p x3pp x4 x4p x4pp
syms x5 x5p x5pp x6 x6p x6pp
% DEFINO NUESTRO SISTEMA
syms omega
syms c
syms d1 d2
syms tita
syms l1 l2 lprin l3 l4 l5 l6 l7
syms m1 m2 m3 m4 m5 m6 m7 md
syms Ig Ia Id Rdisco
syms mteta
syms k1 k2
syms E1 I1 E2 I2
% POSICIONES IMPORTANTES
xcg3=x1+(l3/2);
xcg4=x2+(l4/2);
xcg5=((x1+l3)+(x2+l4))/2;

69 Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante
xcg6=(xcg5+lprin)*0.5; %el 0.5 es porque doy por hecho que es la mitad(X)
vcg3=x1p;
vcg4=x2p;
vcg5=((x1p+x2p)/2);
%xcg5p=0.5*(x1p-l3*x3p*sin(x3)+x2p-l4*x4p*sin(x4));
% alpha=asin((xcg5-l3)/l6);
% alphap=(xcg5p/l6)/sqrt(1-alpha^2);
vcg6=0.5*vcg5; %el 0.5 es porque doy por hecho que es la mitad(X)
alfa=(xcg5-lprin)/l6;
alfap=vcg5/l6;
gamma=(x1-x2)/l5;
gammap=((x1p-x2p)/l5);
vgiro=x6p;
vteta=(-x6p*Rdisco*sin(x6))^2+(x1p+x6p*Rdisco*cos(x6))^2;
vteta2=(-x6p*Rdisco*sin(x6))^2+(x2p+x6p*Rdisco*cos(x6))^2;
w5_6=[gammap,alfap,0];
w5_6t=[gammap;alfap;0];
I5_6=[Ig,0,0;0,Ia,0;0,0,0];
syms n1 n2 n7 n7r
x1eq=0.01;
x2eq=0.01;
g=-10;
T=0.5*w5_6*I5_6*w5_6t+0.5*m3*vcg3^2+0.5*m4*vcg4^2+0.5*md*(x1p^2+x2p^2)+0.5*Id*x6
p^2+0.5*mteta*vteta+0.5*mteta*vteta2+0.5*(m1/l1)*int((x1p*(3*(n1^2/l1^2)-
n1^3/l1^3))^2,n1,0,l1)+0.5*(m2/l2)*int((x2p*(3*(n2^2/l2^2)-
n2^3/l2^3))^2,n2,0,l2);
V=k2*0.5*gamma^2+k1*0.5*alfa^2+m3*g*(xcg3)+g*m4*xcg4+g*m5*xcg5+g*m6*xcg6+g*mteta
*(x1+Rdisco*sin(x6))+g*mteta*(x2+Rdisco*sin(x6))+0.5*(x2-
d2)^2*int(E2*I2*(0.5*(3*(n2^2/l2^2)-n2^3/l2^3))^2,n2,0,l2)+0.5*(x1-
d1)^2*int(E1*I1*(0.5*(3*(n1^2/l1^2)-
n1^3/l1^3))^2,n1,0,l1)+g*(m1/l1)*int(x1*(0.5*(3*(n1^2/l1^2)-
n1^3/l1^3)),n1,0,l1)+g*(m2/l2)*int(x2*(0.5*(3*(n2^2/l2^2)-n2^3/l2^3)),n2,0,l2);
L=T-V;
%DEFINO FUERZAS GENERALIZADAS
Q1=0;

Anexos
70
70
Q2=0;
Q3=0;
Q4=0;
Q6=0;
%DEFINO FUNCIONES DE DISIPACION
dis1=0;
dis2=0;
dis3=0;
dis4=0;
dis6=0;
ec1_1=diff(L,x1p);
ec1_2=-diff(L,x1)+diff(dis1,x1p)-Q1;
ec2_1=diff(L,x2p);
ec2_2=-diff(L,x2)+diff(dis2,x2p)-Q2;
ec6_1=diff(L,x6p);
ec6_2=-diff(L,x6)+diff(dis6,x6p)-Q6;
trozos_eq_var=[ec1_1,ec1_2,ec2_1,ec2_2,ec6_1,ec6_2];
syms f1(t) f2(t) f3(t) f4(t) f5(t) f6(t)
trozos_eq_fun=subs(trozos_eq_var,{x1,x2,x3,x4,x5,x6,x1p,x2p,x3p,x4p,x5p,x6p,x1pp
,x2pp,x3pp,x4pp,x5pp,x6pp},{'f1(t)','f2(t)','f3(t)','f4(t)','f5(t)','f6(t)','D(f
1)(t)','D(f2)(t)','D(f3)(t)','D(f4)(t)','D(f5)(t)','D(f6)(t)','D(D(f1))(t)','D(D
(f2))(t)','D(D(f3))(t)','D(D(f4))(t)','D(D(f5))(t)','D(D(f6))(t)'});
dec1=diff(trozos_eq_fun(1),t)+trozos_eq_fun(2);
dec2=diff(trozos_eq_fun(3),t)+trozos_eq_fun(4);
dec6=diff(trozos_eq_fun(5),t)+trozos_eq_fun(6);
ecuaciones_convariables=[dec1,dec2,dec6];

71 Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante
syms Df1(t) Df2(t) Df3(t) Df4(t) Df5(t) Df6(t) D2f1(t) D2f2(t) D2f3(t) D2f4(t)
D2f5(t) D2f6(t)
ecuaciones_confunciones_casi=subs(ecuaciones_convariables,{'diff(D(f1)(t),t)','d
iff(D(f2)(t),t)','diff(D(f3)(t),t)','diff(D(f4)(t),t)','diff(D(f5)(t),t)','diff(
D(f6)(t),t)'},[D2f1(t),D2f2(t),D2f3(t),D2f4(t),D2f5(t),D2f6(t)]);
ecuaciones_confunciones=subs(ecuaciones_confunciones_casi,{'D(f1)(t)','D(f2)(t)'
,'D(f3)(t)','D(f4)(t)','D(f5)(t)','D(f6)(t)'},[Df1(t)
Df2(t),Df3(t),Df4(t),Df5(t),Df6(t)]);
ecuaciones_contetaresuelto=subs(ecuaciones_confunciones,{f6,Df6,D2f6},[omega*t,o
mega,0]);

Anexos
72
72
Programa para el cálculo de modos wn y C
clear
clc
omega=100;
c=100;
d1=0.03;
d2=0.01;
dextra=0.01;
tita=pi/3;
dens=7860; %kg/metros cubicos
% l1=4.5*11.502e-2;
% l2=l1;
% lprin=2.7*11.502e-2;
% l3=2.7*11.502e-2;
% l4=2.7*11.502e-2;
% l5=2.7*11.502e-2;
% l6=3.5*11.502e-2; %total
l1=0.5176;
l2=l1;
lprin=0.3106;
l3=0.3106;
l4=0.3106;
l5=0.3106;
l6=0.2676; %total=0.4026
v1=2*l1*0.01*0.04; %metros cubicos
v2=v1;
v3=l3*pi*0.012^2;
v4=v3;
v5=v3;

73 Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante
v6=0.4026*0.0690*0.0345;
m1=dens*v1;
m2=m1;
m3=dens*v3;
m4=m3;
m5=dens*v5;
m6=dens*v6;
md=5;
Ig=(1/3)*m6*0.01^2;
Ia=(1/3)*m6*0.402^2;
Rdisco=0.15;
mdisco=pi*Rdisco^2*0.005;
Id=(1/2)*mdisco*Rdisco^2;
mteta=0.1; %variable
E7=2.006374e11;
G7=79289708870;
Rprob=0.0127/2;
I7z=(1/4)*pi*Rprob^4;
J7=2*I7z;
l7=0.03;
ktors=G7*J7/l7;
kflex=E7*I7z/l7;
k1=1*((tita/(pi/2))*ktors+((pi/2)-tita/(pi/2))*kflex);
k2=1*((tita/(pi/2))*kflex+((pi/2)-tita/(pi/2))*ktors);
E1=2.1e11;
b=0.04;
h=0.015;
r=0.081/2;
I1=2*(((b*h^3)/12)+b*h*r^2);
E2=E1;
I2=I1;
Anexos
74
74
% % DEFINO NUESTRO SISTEMA
% syms omega
%
% syms c
%
% syms d1 d2
%
% syms tita
%
% syms l1 l2 lprin l3 l4 l5 l6 l7
%
% syms m1 m2 m3 m4 m5 m6 m7 md
%
% syms Ig Ia Id Rdisco
% syms mteta
%
% syms k1 k2
%
% syms E1 I1 E2 I2
K11=(k2/l5^2)+k1*(1/(2*l6^2))*(1/2)+(33/280)*E1*I1*l1*2;
K12=-k2*2*(1/(2*l5^2))+k1*(1/(2*l6^2))*(1/2);
K21=-k2*2*(1/(2*l5^2))+k1*(1/(2*l6^2))*(1/2);
K22=k2*(1/(2*l5^2))*2+k1*(1/(2*l6^2))*(1/2)+(33/280)*E2*I2*l2*2;
K=[K11 K12;K21 K22];
M11=(2*mteta/2)+m3+md+(1/(2*l6^2))*Ia*(1/2)+Ig*(1/(2*l5^2))*2+(33/35)*l1*(m1/l1)
;
M12=(1/(2*l6^2))*Ia*(1/2)-Ig*(1/(2*l5^2))*2;
M21=Ia*(1/(2*l6^2))*(1/2)-Ig*(1/(2*l5^2))*2;
M22=mteta*(1/2)*2+m4+md+Ia*(1/(2*l6^2))*(1/2)+Ig*(1/(2*l5^2))*2+(33/35)*l2*(m2/l
2);
M=[M11 M12;M21 M22];
75 Análisis Dinámico y Simulación Numérica de una Máquina de Ensayos a Fatiga Biaxial Resonante
%-----------------------------------------------------------------
[autovect autoval]=eig(inv(K)*M);
frec_rad=[sqrt(1/autoval(1,1));sqrt(1/autoval(2,2))]
frec_rpm=frec_rad.*(1/(2*pi)).*60
mmodal=[-1 1;1 1];
Kd=mmodal'*K*mmodal;
Md=mmodal'*M*mmodal;
eps=0.01;
Cd=[eps*2*Md(1,1)*sqrt(Kd(1,1)/Md(1,1)) 0;0
eps*2*Md(2,2)*sqrt(Kd(2,2)/Md(2,2))];
C=inv(mmodal')*Cd*inv(mmodal);


















