
Tipos de Robot Movil
30
INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4. 1 UNIVERSIDAD DE CHILE FACULTAD DE CS. FS. Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA ROBOTS MÓVILES J. RUIZ DEL SOLAR R. SALAZAR
Transcript of Tipos de Robot Movil

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
1
UNIVERSIDAD DE CHILE FACULTAD DE CS. FS. Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
ROBOTS MÓVILES
J. RUIZ DEL SOLAR R. SALAZAR

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
2
ÍNDICE ROBOTS MÓVILES
efinición 4. Robot Móviles 4.1 Robot Móviles con Ruedas
4.1.1 Ruedas 4.1.2 Giro 4.1.3 Arreglos de ruedas
Diferencial Síncrono Triciclo Carro Omnidireccional
4.1.4 Cinemática Restricciones cinemáticas Ecuaciones para la Cinemática diferencial Ecuaciones de Cinemática – Triciclo Ecuaciones de Cinemática – Omnidireccional
4.1.5 Forma del Robot 4.2 Robot con Patas
Movimiento Básico de un Hexápodo 4.3 Arquitecturas Básicas de Control
4.3.1 Arquitectura Deliberativa Modelo del ambiente Mapas métricos Mapas Topológicos Plan
4.3.2 Arquitectura Reactiva 4.3.3 Arquitecturas Híbridas
Arquitectura Jerárquicas Arquitectura de Pizarrón Arquitectura Probabilística
4.3.4 Arquitectura Reactiva 4.4 Algoritmo Básico de Navegación ( Opcional ) 4.5 Bibliografia
3
3
33344456677899
10
1112
131314141515161717181820
---Propuesto--- Geometría de sistemas NO- Holonómicos Trayectoria Optima para robot móviles no Holonómicos Planificación de ruta probabilística. Algoritmos de detección de colisión para planificación de movimiento.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
3
4. ROBOT MÓVILES DEFINICIÓN Se define a un robot móvil cómo un dispositivo formado por componentes físicos y computacionales, divididos en cuatro subsistemas: � Locomoción � Percepción
� Razonamiento � Comunicación
En este curso se estudiaran los robots móviles terrestres, entendidos cómo aquellos capaces de desplazarse en superficies. Se pueden identificar robot móviles indoor (dentro de un espacio controlado) u outdoor (al aire libre). En el presente capitulo se estudiaran los robot móviles, y se profundizara específicamente en los robot móviles con ruedas y robot móviles con patas. A continuación se verán las características mas importante de considerar de los robot móviles.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
4
4.1 ROBOT MÓVILES CON RUEDAS Los robots móviles terrestres poseen diversas aplicaciones en la industria, tales cómo el bodegaje, inspección y control de producción a distancia. Poseen diversas aplicaciones en la minería (aplicaciones presentes en Chile), y en el transporte en general. También, en el contexto de robots de servicio, los robots móviles se han introducido recientemente en la forma de aspiradoras para el hogar (caso Trilobite Electrolux). 4.1.1 RUEDAS Las ruedas del robot móvil se mueven por el contacto superficial (o fricción) con la superficie), idealmente, se desplaza 2π r por vuelta.
Eje X Eje Yr
Eje X Eje Yr
El robot puede tener varias ruedas para lo cual es importante estudiar su giro. 4.1.2 GIRO Un robot móvil puede contar con varias ruedas, y existe un punto alrededor del cual cada rueda sigue una trayectoria circular cuyo punto se llama Centro de Curvatura Instantáneo (CCI) en el caso de una trayectoria recta el CCI está en infinito.
CCI
CCI
CCI

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
5
4.1.3 ARREGLOS DE RUEDAS Las formas mas conocidas de disponer las ruedas en los robots móviles son : � Diferencial � Síncrono � Tipo triciclo � Tipo carro
DIFERENCIAL Este el uno de los esquemas más sencillos, básicamente consiste de dos ruedas en un eje común, donde cada rueda se controla independientemente cuyos movimientos son: � Línea Recta � En arco � Vuelta sobre su propio eje
Este esquema utiliza una o dos ruedas adicionales (caster) para mantener el balance, estas formas tienen diferentes nombre dependiendo de las ruedas por ejemplo: Con 3 ruedas se denominan triangulo, este esquema puede presentar problemas de estabilidad y con 4 ruedas se conoce como diamante la perdida de contacto de las ruedas de tracción hace requerir de un sistema de suspensión. Para que el movimiento sea recto se requiere que las ruedas vayan a la misma velocidad SÍNCRONO Las ruedas se mueven en forma síncrona, es decir, al mismo instante. El movimiento síncrono es un caso particular del diferencial, donde cada eje se mueve en forma dependiente para dar vuelta y avanzar. Las ruedas están ligadas de forma tal que siempre apuntan en la misma dirección y para dar vuelta giran las ruedas sobre el eje vertical, por lo que la dirección de la estructura se mantiene por lo que se requiere de un mecanismo adicional para mantener el frente del chasis (estructura del robot) en la dirección de las ruedas (torreta).

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
6
ΘΘΘΘ
En la figura se aprecia este movimiento sobre el eje de rotación de las dos ruedas delanteras. Algunas ventajas de los sistemas Síncronos es que se evitan los problemas de inestabilidad, pérdida de contacto del diferencial y mayor complejidad mecánica (eje de giro) Triciclo Los triciclos tienes dos ruedas fijas que le dan tracción, además cuentan de una rueda para la dirección que normalmente no tiene tracción. Estos sistemas tiene buena estabilidad y simplicidad mecánica, tiene facilidad para ir recto y su cinemática es mas compleja. CARRO Los sistema de carro son similares al triciclo solo que cuentan con dos ruedas de tracción y dos ruedas para dirección. Tiene una mayor complejidad mecánica que el triciclo por el acoplamiento entre las 2 ruedas de dirección. Sus principales ventajas son buena estabilidad y facilidad de ir derecho. La desventaja es su complejidad cinemática
INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
7
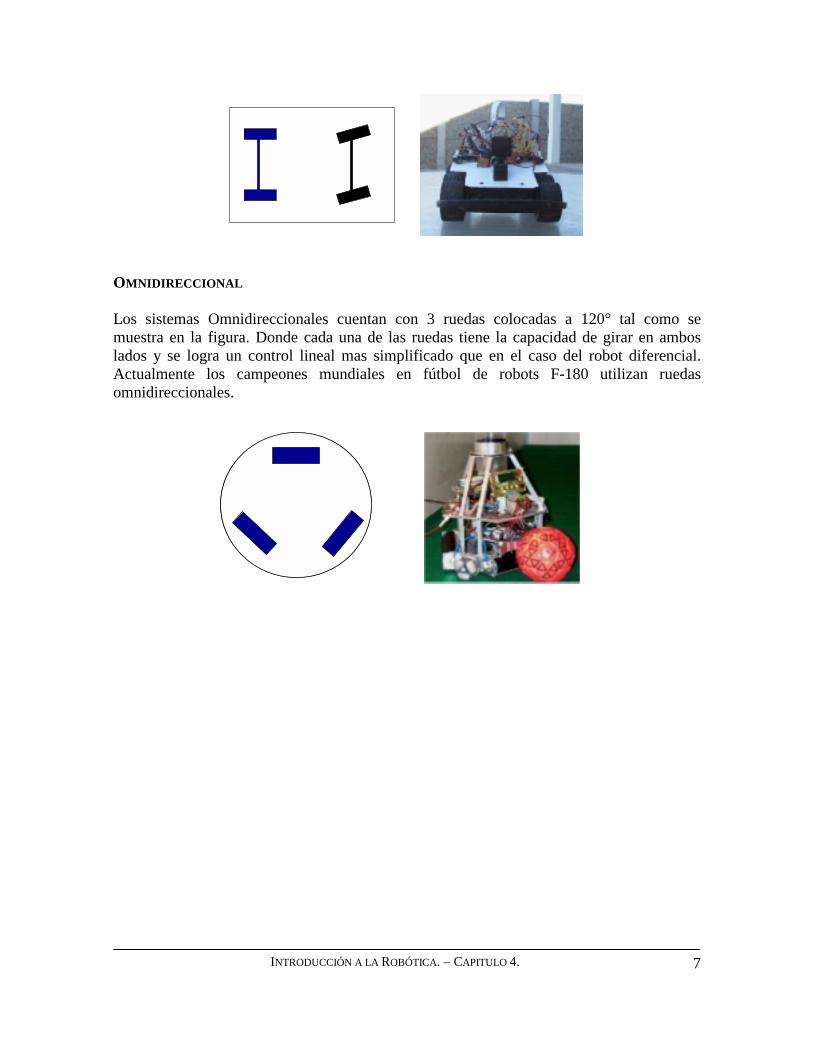
OMNIDIRECCIONAL Los sistemas Omnidireccionales cuentan con 3 ruedas colocadas a 120° tal como se muestra en la figura. Donde cada una de las ruedas tiene la capacidad de girar en ambos lados y se logra un control lineal mas simplificado que en el caso del robot diferencial. Actualmente los campeones mundiales en fútbol de robots F-180 utilizan ruedas omnidireccionales.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
8
4.1.4 CINEMÁTICA Los diferentes tipos de ruedas (tracción y dirección) tienen diferentes propiedades cinemáticas, por ejemplo un robot móvil normalmente tiene 3 grados de libertad respecto a una referencia: posición en el plano (X,Y) y orientación (Θ ). Idealmente, independientemente de donde inicie, el robot debe poder moverse a cualquier posición y orientación (X,Y, Θ )
(X,Y)ΘΘΘΘ
RESTRICCIONES CINEMÁTICAS Se tienen dos tipos de restricciones que tiene que ver con el acoplamiento de los robot las cuales se conocen como: � Holonómicos: los diferentes grados de libertad están desacoplados. Los robots
diferenciales y síncronos: se puede desacoplar la posición de orientación (rotando sobre su eje)
� No-holonómicos: los grados de libertad están acoplados, por ejemplo los triciclos y
carros: para dar vuelta debe moverse hacia el frente o hacia atrás – es más complejo llegar a la posición final deseada

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
9
CCI
LVr
Vl
R
ω
CCI
LVr
Vl
R
ω
Holonómicas -- DIFERENCIAL --
No-holonómicas -- CARRO --
ECUACIONES PARA LA CINEMÁTICA DIFERENCIAL A continuación se muestran algunas relaciones importantes en la cinemática diferencial que se deben considerar para controlar el giro del robot móvil.
( ) VrR L =−⋅ 2ω
−+⋅=
VlVrVlVrLR
2
( ) VlR L =+⋅ 2ω L
VlVr −=ω
Es interesante destacar que si ambas ruedas giran en sentido contrario, es decir, –Vr = Vl, R=0.
Donde: ω :Velocidad Angular; R : Radio de Giro; l :Distancia entre las Ruedas; Vr :Velocidad Rueda Derecha Vl : Velocidad Rueda Izquierda

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
10
ECUACIONES DE CINEMÁTICA – TRICICLO De forma análoga se pueden encontrar las ecuaciones para el triciclo.
−⋅= απ2
tandR
22 Rdv+
=ω
ECUACIONES DE CINEMÁTICA – OMNIDIRECCIONAL Para los robots omnidireccionales se pueden probar las siguiente ecuaciones donde se proyectan las velocidades anuales en X e Y.
−−
=
3
2
1
333
3332
330
www
VV
Lr
Lr
Lr
rrr
rr
y
x
θ�
Donde
321 ;; www son las velocidades angulares de cada rueda omnidireccional. L: Distancia de cada ruada al centro de robot r : radio de la rueda omnidireccional. θ : Angulo de desfase con respecto al eje X, Y
Donde: ω :Velocidad Angular; R : Radio de Giro; d :Distancia entre las Ruedas; v :Velocidad Rueda α : Angulo de Giro
CCI
ΘΘΘΘ
y
x
αααα vd
R
ω
CCI
ΘΘΘΘ
y
x
αααα vd
R
ω
X
Y
Xf
Yf
1w
3w2w
r
X
Y
Xf
Yf
1w
3w2w
rr

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
11
Se puede demostrar que para un sistema absoluto se puede descomponer las velocidades de la siguiente manera
( ) ( )( ) ( )
=
3
2
1
1000cos0cos
'''
www
sensen
VV
y
x
θθθθ
θC
X
Y
Xf
Yf
1w
3w2w
r
x’
y’
X
Y
Xf
Yf
1w
3w2w
r
X
Y
Xf
Yf
1w
3w2w
rr
x’
y’
x’
y’

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
12
4.1.5 FORMA DEL ROBOT La forma del robot móvil tiene un fuerte impacto en su facilidad de navegación, en particular con obstáculos y pasillos angostos por ejemplo: Robot cilíndricos: –Es más fácil navegar por la simetría del robot Robots cuadrados: –Es más complejo navegar, depende de la orientación del robot Robot cilíndrico Robot cuadrado

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
13
4.2 ROBOT CON PATAS A diferencia de los robot móviles, estos robot en lugar de utilizar ruedas utilizan patas. El problema principal es la estabilidad de estos robot, lo que implica una mayor complejidad en su control lo que implica también un mayor consumo energía ya que tiene que oponerse a la fuerza de gravedad. Dentro de los Robot móviles destacan los bípedos, cuadrúpedos, hexápodos, octópodos, etc. A continuación se presentan algunas imágenes de estos robots para luego mostrar a modo de ejemplo el movimiento básico de un hexápodo.
Robot AIBO de Sony
Robot Humanoide de Honda
Hexápodo de Parallax 6 patas
Hexápodo de Parallax 6 patas
Hexápodo de Parallax 6 patas
Hexápodo de Parallax 6 patas

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
14
MOVIMIENTO BÁSICO DE UN HEXÁPODO Un hexápodo es un robot móvil con 6 patas y dependiendo de la configuración que este tenga dependerá la forma en que el robot se moverá. Por ejemplo, hay robot hexápodos puede tener 12 motores dos para cada una de las patas, con lo que el algoritmo para desplazarse dependerá de esta configuración, en la siguiente imagen se muestra un robot hexápodo con 12 grados de libertad.
Ahora si el robot tiene 3 motores, con esta configuración el movimiento es bastante diferente, ya que el robot solo cuenta con 3 grados de libertad, tal como se puede ver en la figura.
RSalazar-MBustosRSalazar-MBustos

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
15
Adelante/Atrás
Partida
Paso 1
Paso 2
Paso 3
Paso 4
Derecha/Izquierda
Partida
Paso 1
Paso 2
Paso 3
Paso 4
1
2
3
4
5
6
1
2
3
4
5
6
Adelante/Atrás
Partida
Paso 1
Paso 2
Paso 3
Paso 4
Adelante/Atrás
Partida
Paso 1
Paso 2
Paso 3
Paso 4
Derecha/Izquierda
Partida
Paso 1
Paso 2
Paso 3
Paso 4
Derecha/Izquierda
Partida
Paso 1
Paso 2
Paso 3
Paso 4
1
2
3
4
5
6
1
2
3
4
5
6
A modo de ejemplo se muestra el algoritmo de la Tarántula para desplazarse. Uno de los motores se utiliza para levantar las piernas 1, 3, 5 o 2, 4, 6 y los otros motores el movimiento horizontal las piernas 1 – 3 o 4 – 6. La partida consiste en levantar las patas 2 ó 5, para luego comenzar a moverse ya sea hacia delante (atrás) o derecha (izquierda). Para caminar adelante el se tiene que seguir la secuencia Paso 1 al Paso 4, para caminar hacia atrás se debe hacer la secuencia inversa es decir del Paso 4 al Paso 1. Esta misma secuencia se utiliza para doblar a la derecha o a la izquierda. Estas secuencias básicas son las que se aplican para los hexápodos y se pueden implementar las diversas variantes para lograr mejores resultados tanto en velocidad de avance o ángulo de giro.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
16
4.3 ARQUITECTURAS BÁSICAS DE CONTROL La arquitectura tiene que ver con la organización de la generación de acciones a partir de las percepciones del robot y con el arreglo de módulos de software para un robot móvil. Por ejemplo, ir a la meta (luz) evitando los obstáculos.
Se pueden encontrar tres estructuras básicas estas son: � Arquitecturas deliberativas (Mapas y Planes) � Arquitecturas reactivas � Arquitecturas híbridas
4.3.1 ARQUITECTURA DELIBERATIVA Consiste en construir un mapa del ambiente, incluyendo obstáculos y meta. También se debe generar un plan para ir de la posición inicial a la meta evitando los obstáculos y ejecutar el plan. Algunas ventajas de este arquitectura es tener un modelo del ambiente que permite optimizar las acciones para obtener el “mejor” plan. La limitaciones son varias ya que se necesita tener un modelo preciso del ambiente, altos requerimientos de cómputo y memoria, dificultad de operar en un mundo dinámico o desconocido y reacción “lenta” a situaciones imprevistas. Esta arquitectura esta basada en el paradigma de sensa-planea-actua (SPA): Se tiene un modelo completo (mapa) del ambiente sobre el cual se construye un plan de acción para realizar la tarea basado en el modelo para luego ejecutar el plan.
INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
17
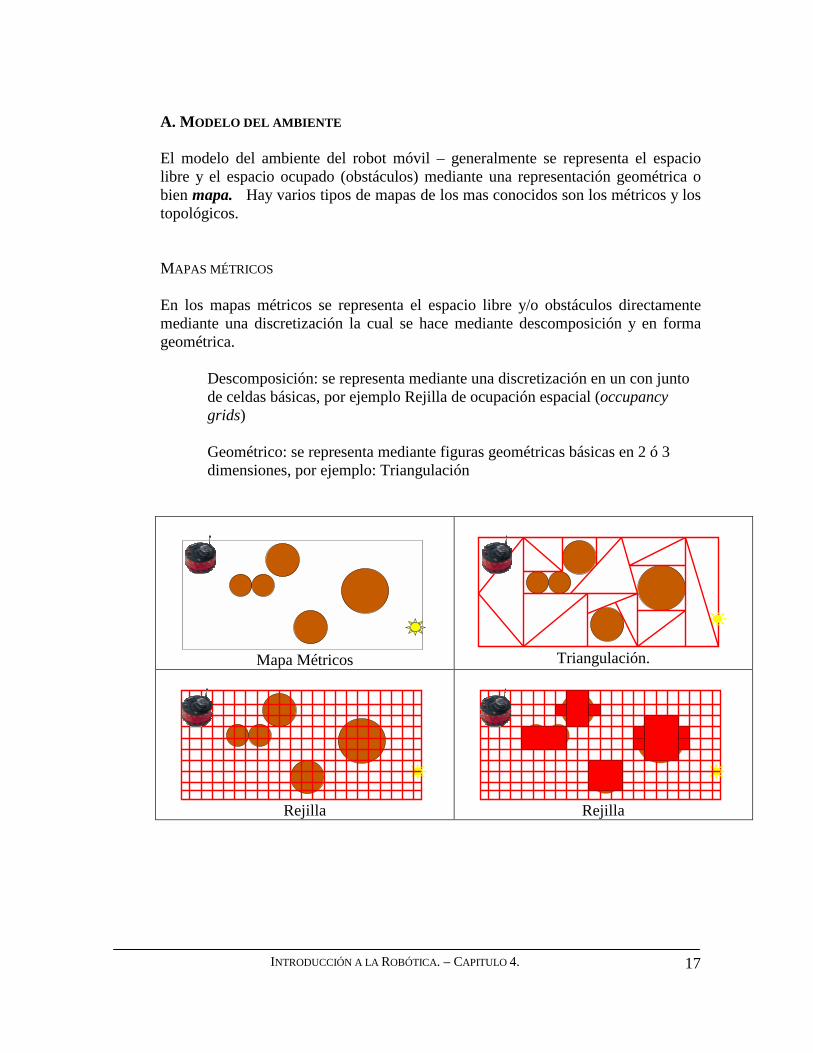
A. MODELO DEL AMBIENTE El modelo del ambiente del robot móvil – generalmente se representa el espacio libre y el espacio ocupado (obstáculos) mediante una representación geométrica o bien mapa. Hay varios tipos de mapas de los mas conocidos son los métricos y los topológicos. MAPAS MÉTRICOS En los mapas métricos se representa el espacio libre y/o obstáculos directamente mediante una discretización la cual se hace mediante descomposición y en forma geométrica.
Descomposición: se representa mediante una discretización en un con junto de celdas básicas, por ejemplo Rejilla de ocupación espacial (occupancy grids) Geométrico: se representa mediante figuras geométricas básicas en 2 ó 3 dimensiones, por ejemplo: Triangulación
Mapa Métricos
Triangulación.
Rejilla
Rejilla

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
18
MAPAS TOPOLÓGICOS Los mapas topológicos se considera el ambiente como una serie de lugares y conexiones entre dichos lugares. Estos se pueden considerar como grafo: donde hay nodos (lugares) y arcos (conexiones). Además se puede incorporar información métrica al grafo tal como : longitud y orientación de los arcos. En el siguiente grafico se puede apreciar mapa topológico.
Grafo de conectividad entre “cuartos”
Grafo de conectividad entre “cuartos”
B. PLAN El plan es un conjunto de acciones que permiten a un agente (robot) ir de un estado inicial a un estado final o meta. Los elementos básicos para hacer un plan son: a) Estados (por ejemplo la Posición del robot), incluyendo el estado inicial y el estado meta y Operadores (acciones que llevan de un estado a otro). Ejemplo de Plan. Considerando el mapa de rejilla se tienen: � Los Estados (posición X,Y en el mapa, Estado inicial: 0,0 y Estado meta
(luz): Xm, Ym) � Las Acciones (Movimiento a alguna de las celdas vecinas –X+1, Y+1, X-1,
Y-1)

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
19
4.3.2 ARQUITECTURA REACTIVA En el enfoque reactivo hay una conexión directa de percepción a acción sin necesidad de un modelo del mundo, normalmente se considera una serie de niveles de comportamiento que realizan diferentes comportamientos en forma “paralela” (subsumtion architecture). En la siguiente figura se muestra la arquitectura basada en comportamiento.
Planear
Explorar
Deambular
Evitar objetos
sensores actuadores
Dentro de esta arquitectura hay que realizar un manejo de conflictos ya que al existir varios módulos en paralelo pueden existir conflictos, que se resuelven dando prioridades a los diferentes comportamientos donde el comportamiento de mayor prioridad “suprime” los otros comportamientos, a continuación se muestran dos casos típicos de decisión.
Deambular
Evitar objetos motores
Ir a la luz
Evitar objetos motores
Buscar luz
Algunas ventajas son : Bajo requerimiento de capacidad de cómputo, respuesta rápida; Facilidad de desarrollo modular; No requiere un modelo del mundo. Las limitaciones son: Difícil de extender a tareas complejas; Limitaciones sensoriales pueden ocasionar problemas al no contar con un modelo; No garantiza la mejor solución (óptimo).

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
20
Planeador
Secuenciador
sensores actuadoresavanzarsin
chocargirar ir a
luz
Controlador
Planeador
Secuenciador
sensores actuadoresavanzarsin
chocargirar ir a
luz
Controlador
4.3.3 ARQUITECTURAS HÍBRIDAS Son la combinación de arquitecturas deliberativas y reacticas que intentan aprovechar ventajas de ambas, por ejemplo: � Arquitecturas jerárquicas (3 capas) � Arquitecturas de pizarrón (blackboard) � Arquitecturas probabilísticas.
A. Arquitectura Jerárquicas. Las arquitecturas jerárquicas de 3 capas tienen tres componentes básicos: � Capa de planeación: Mecanismo deliberativo (planeador) � Capa de secuenciación: Mecanismo de ejecución de plan (secuenciador) � Capa de habilidades: Mecanismo de control reactivo (controlador)
Donde el secuenciador selecciona los mecanismos básicos de la capa de habilidades en base al plan de la capa de planeación, tal como se muestra a continuación.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
21
B. Arquitectura de Pizarrón Son un conjunto de módulos o procesos que interactúan mediante un espacio de información común llamado pizarrón (blackboard). Cada módulo implemente una función específica y en conjunto todos realizar la tarea y todos los módulos pueden ver la información en el pizarrón y actúan en forma oportunística, de acuerdo al que más pueda aportar en ese momento (coordinador) Arquitectura de Pizarrón
Obtenerinfo.
sensoresIr a lameta
Evitarobstáculo control
planeación
PIZARRÓN
C. Arquitectura Probabilística La arquitectura probabilística considera la incertidumbre inherente en el mundo real, tanto en la información de los sensores como en la ejecución de los actuadotes. Se representan en forma explícita dicha incertidumbre mediante distribuciones de probabilidad: � Integración probabilística de sensores � Mapas probabilísticos � Acciones basadas en teoría de decisiones (maximizar utilidad)

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
22
sensores actuadoresFusiónsensorial
Mapaprobabi-
lístico
Controlbasado
enutilidad
Se puede crear un mapa de rejilla probabilístico donde cada celda tiene asociada una probabilidad de estar ocupada.
A modo de ejemplo se puede observar un mapa de celdas probabilístico de un robot móvil.
INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
23
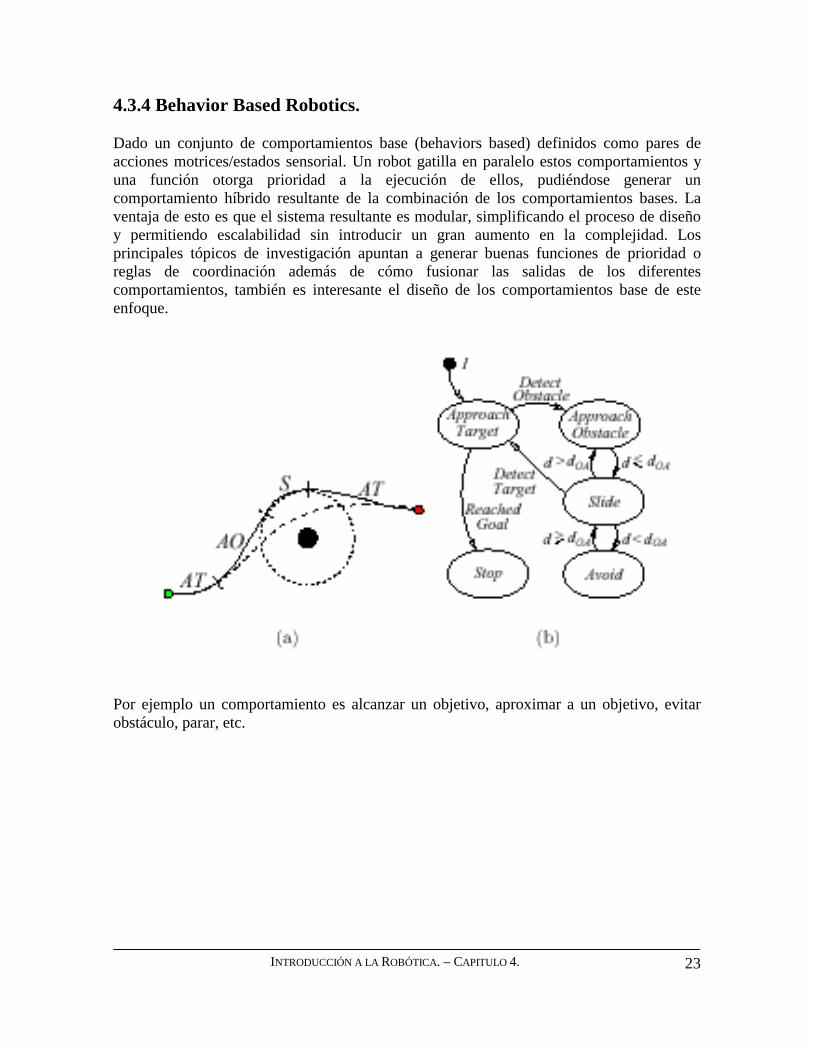
4.3.4 Behavior Based Robotics. Dado un conjunto de comportamientos base (behaviors based) definidos como pares de acciones motrices/estados sensorial. Un robot gatilla en paralelo estos comportamientos y una función otorga prioridad a la ejecución de ellos, pudiéndose generar un comportamiento híbrido resultante de la combinación de los comportamientos bases. La ventaja de esto es que el sistema resultante es modular, simplificando el proceso de diseño y permitiendo escalabilidad sin introducir un gran aumento en la complejidad. Los principales tópicos de investigación apuntan a generar buenas funciones de prioridad o reglas de coordinación además de cómo fusionar las salidas de los diferentes comportamientos, también es interesante el diseño de los comportamientos base de este enfoque.
Por ejemplo un comportamiento es alcanzar un objetivo, aproximar a un objetivo, evitar obstáculo, parar, etc.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
24
4.5 ALGORITMO BÁSICO DE NAVEGACIÓN ( OPCIONAL )
La planificación del movimiento basada en sensores trata de dirigir los movimientos de los robots en entornos desconocidos cuando la única fuente de información es suministrada por los propios sensores del robot durante su movimiento. Uno de los componentes esenciales en las arquitecturas reactivas (sin reconstrucción de entorno) es la evitación local de obstáculos, es decir, el robot se movería hacia su meta y realizaría una maniobra especial de evitación de obstáculos cuando alguno se interpusiera según la información recogida por los sensores.
Este es el principio de funcionamiento de los denominados algoritmos heurísticos. Constan de al menos dos bloques operacionales o comportamientos elementales del tipo: “ir hacia el objetivo” y “alejarse del obstáculo” y su interrelación producirá un comportamiento complejo que hemos dado en llamar “navegación sensorial”.
En la figura siguiente se muestra un ejemplo de arquitectura reactiva de control para navegación. Cada módulo resuelve un problema de navegación, recibiendo directamente la información de los sensores y generando referencias al sistema de control del robot de manera asíncrona .
EVITACIÓN LOCAL DE OBSTÁCULOS CON FUNCIÓN POTENCIAL
Los navegadores locales más empleados se basan en la idea de función potencial artificial. La planificación con función potencial se plantea como un aumento de las capacidades del control de bajo nivel de los accionadores del robot, de manera que este incluyera otras habilidades como la evitación de obstáculos. La idea principal aplicable a robots móviles se describe como sigue:

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
25
El robot móvil se mueve en un campo de fuerzas. La posición a alcanzar es un polo de atracción para él o factor final y los obstáculos son superficies de repulsión para los componentes del manipulador.
Una arquitectura reactiva con sus componentes de atracción hacia el objetivo y de repulsión producida por los obstáculos va a producir un comportamiento que va a depender en último término, de un conjunto de parámetros de configuración que habrá que seleccionar atentamente.
LIMITACIONES DEL ALGORITMO REACTIVO HOLONÓMICO
Por ser reactivo no garantiza la convergencia a la solución. Es un algoritmo de carácter heurístico por lo que su mayor problema son los mínimos locales
Son holonómicos debido a que su diseño tiende a consideraciones geométricas sobre la disposición de los obstáculos en el entorno de trabajo, y por tanto no tienen en cuenta las posibles restricciones de movilidad.
Existe otras limitaciones como:
� La imprecisión en la información sensorial � Los problemas en tiempo real.
Ambos problemas son más dependientes de la tecnología utilizada y no del tipo de algoritmo implementado.
NAVEGADOR REACTIVO CON FUNCIÓN POTENCIAL
Como ya se expuso este algoritmo por lo menos presenta dos componentes:
� Uno de atracción hacia el objetivo � Otro de repulsión hacia el obstáculo
La planificación del movimiento consiste en la adecuada combinación de ambos, de manera que conduzca el robot hacia el objetivo sin colisiones.
El algoritmo de navegación que se estudiará consta de tres componentes: atracción, repulsión y fusión de comandos. Se diseña para un robot de dos dimensiones, de forma circular y radio Rr de movimiento libre (sin restricciones). El robot está dotado de “n” sensores de distancia, dispuestos en su periferia, cada sensor aporta una orientación fija φi, respecto al sistema de referencia Fa asociado al robot.

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
26
POTENCIAL DE ATRACCIÓN El bloque de atracción genera el movimiento en la dirección del objetivo, su efecto sobre el robot es análogo al de una fuerza que lo empuja hacia su objetivo.
Factores que intervienen en la generación de la Fuerza de Atracción Fatr
La Fuerza de atracción Fatraccion en función de la posición actual (x,y) y la deseada (xf,yf).

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
27
Entonces:
Katracción es un parámetro de configuración y df es la distancia al objetivo en cada instante. La dirección hacia la meta δatracción referida al sistema de referencia vale:
POTENCIAL DE REPULSIÓN
Este bloque opera en función de la información dada por n sensores de distancia del robot. La distancia que mide cada sensor Si se puede asociar al modulo de un vector Si orientado hacia ( πφ +i ) y tanto mayor cuanto más cerca esté del obstáculo.
La dirección a la que apunta la fuerza repulsiva dada por el i-ésimo sensor apunta en dirección contraria al obstáculo.
Donde Crepulsión se define como:
Donde Krep y Cj son parámetros nuevos de configuración y Rr es el radio mayor del robot.
Dado que se tiene n sensores:

INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
28
Interpretando la medida de cada sensor de distancia como un vector de repulsión en la dirección contraria al sensor. La información de los n vectores se integra mediante su suma vectorial.
Determinando la dirección de repulsión
δrep devuelve una “dirección de repulsión” orientada a zonas en menor densidad de obstáculos.
Generación de la Fuerza de repulsión y la dirección de repulsión FUSIÓN DE COMANDOS
La fusión de ambos vectores de comportamientos Fatracción + Frep consiste en una suma vectorial en Fw (sistema de referencia fijo).
INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
29
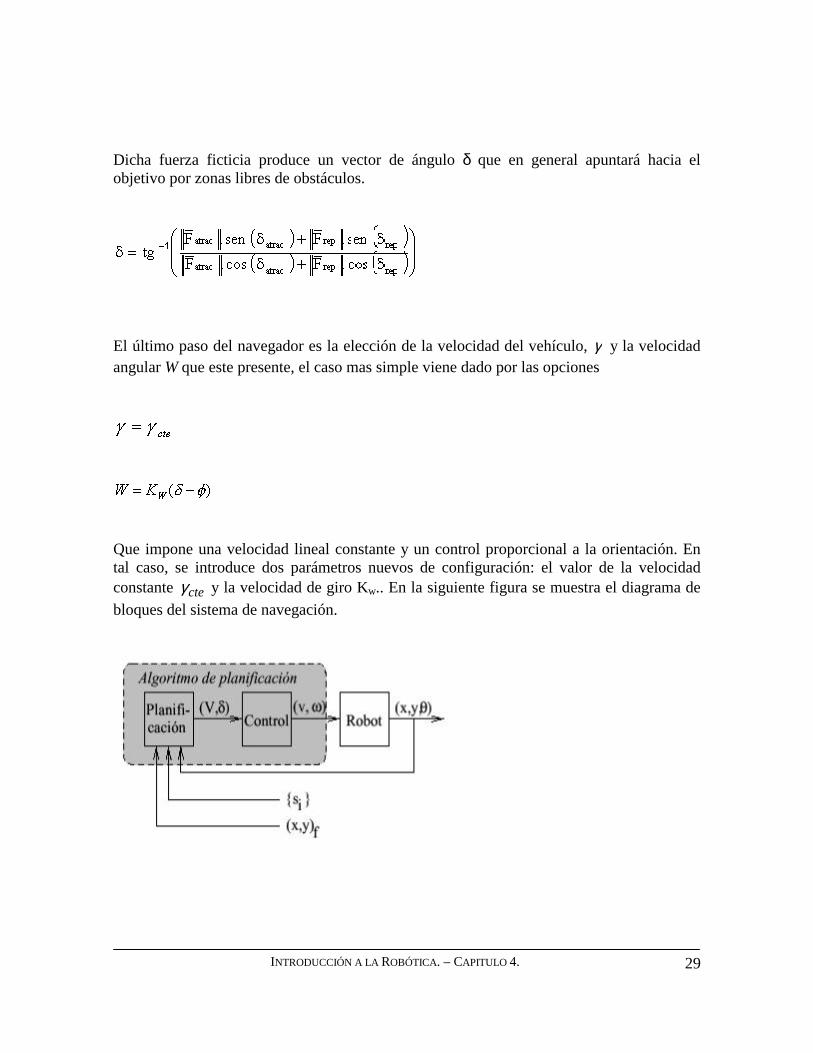
Dicha fuerza ficticia produce un vector de ángulo δ que en general apuntará hacia el objetivo por zonas libres de obstáculos.
El último paso del navegador es la elección de la velocidad del vehículo, γ y la velocidad angular W que este presente, el caso mas simple viene dado por las opciones
Que impone una velocidad lineal constante y un control proporcional a la orientación. En tal caso, se introduce dos parámetros nuevos de configuración: el valor de la velocidad constante cteγ y la velocidad de giro Kw.. En la siguiente figura se muestra el diagrama de bloques del sistema de navegación.
INTRODUCCIÓN A LA ROBÓTICA. – CAPITULO 4.
30
4.4 BIBLIOGRAFIAS M. W. M. Gamini Dissanayake, Paul Newman, Steven Clark, Hugh F. Durrant-Whyte and M. Csorba. “A Solution to the Simultaneous Localization and Map Building (SLAM) Problem”. IEEE Transactions On Robotics And Automation, vol. 17, no. 3, June 2001 . José E. Guivant and Eduardo Mario Nebot “Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation” IEEE Transactions On Robotics And Automation, vol. 17, no. 3, June 2001 J. A. Castellanos, J. Neira, and J. D. Tardós. “Multisensor Fusion for Simultaneous Localization and Map Building”. IEEE Transactions On Robotics And Automation, vol. 17, no. 6, December 2001 Somajyoti Majumder,Hugh Durrant-Whyte,Sebastian Thrun and Marc de Battista, “An Approximate Ba esian Method for Simultaneous Localisation and Mapping”. IEEE Trans. Robotics and Automation Submission Cover Page Jose Guivant, Eduardo Nebot and Stephan Baiker. “Autonomous Navigation and Map building Using Laser Range Sensors in Outdoor Applications”. Journal of Robotic Systems, Vol 17, No 10, October 2000, pp 565-583 Sebastian Thrun. “Robotic Mapping: A Survey”. School of Computer Science, Carnegie Mellon University. Pittsburgh, PA 15213 Joseph L. Jones, Bruce A. Seiger and Anita M. Flynn, “ Mobile Robots Inspiration to Implementation”. A K Peters. Guilherme N. DeSouza and Avinash C. Kak, “Vision for Mobile Robot Navigation: A Survey”. IEEE Transactions on pattern analysis and machine intelligence, vol.24 n° 2 February 2002, pp. 237-267. Irobot. Magellan Pro Compact Mobile Robot user’s guide. Irobot. Mobility Robot Integration Software user’s guide.













![Construccion de Un Robot Movil[1]](https://static.fdocuments.ec/doc/165x107/5571f80649795991698c7b38/construccion-de-un-robot-movil1.jpg)



