Tesis Ferrer
384
ESTUDIO DEL COMPORTAMIENTO DE PILARES DE EDIFICACIÓN FRENTE A CARGAS DE IMPACTO Mª Belén Ferrer Crespo
-
Upload
martin-nesta -
Category
Documents
-
view
40 -
download
7
description
impacto estacionamiento
Transcript of Tesis Ferrer

ESTUDIO DEL COMPORTAMIENTO DE PILARES DE EDIFICACIÓN FRENTE A CARGAS DE IMPACTO
Mª Belén Ferrer Crespo

UNIVERSIDAD DE ALICANTE
Departamento de Ingeniería de la Construcción, Obras Públicas e
Infraestructura Urbana
ESTUDIO DEL COMPORTAMIENTO DE PILARES DE
EDIFICACIÓN FRENTE A CARGAS DE IMPACTO
TESIS DOCTORAL
Autor:
Mª Belén Ferrer Crespo
Directores:
Salvador Ivorra Chorro
Ramón Irles Mas
Alicante, 2011


D. Salvador Ivorra Chorro, Profesor Titular de la Universidad
de Alicante y D. Ramón Irles Mas, Catedrático de la Universidad
de Alicante, certifican:
Que la presente memoria, titulada: “Estudio del
comportamiento de pilares de edificación frente a cargas de
impacto” ha sido realizada bajo nuestra dirección por Dña. Mª
Belén Ferrer Crespo y constituye su Tesis para optar al grado de
Doctor por la Universidad de Alicante. Asimismo emitimos nuestra
conformidad para que dicha memoria sea presentada y tenga lugar,
con posterioridad, la correspondiente lectura.
Fdo.: Salvador Ivorra Chorro Fdo.: Ramón Irles Mas
Alicante, Mayo 2011


A David


AGRADECIMIENTOS
Ante todo quisiera agradecer la oportunidad que me han brindado mis directores de realizar este trabajo. En particular, me gustaría destacar la actitud positiva que han tenido ante la propuesta de realizar la parte experimental de este trabajo. No es fácil que alguien muestre interés y confianza cuando se le propone: “Quiero hacer chocar coches contra pilares a escala real”, especialmente cuando en esta Universidad no se había hecho nada remotamente parecido.
Debo agradecer también la colaboración desinteresada de algunas empresas durante la realización de los ensayos, como Pavasal, que llevó a cabo las obras necesarias para la ejecución de la rampa y la cimentación del bastidor o Prefabricados Saval Hermanos, que construyó los pilares necesarios para los ensayos. Además, la parte experimental de este trabajo ha sido posible gracias a la financiación obtenida con el proyecto financiado en convocatoria pública: “Estudio numérico y experimental del comportamiento de pilares de edificación frente a cargas de impacto producidas por vehículos” (GVPRE/2008/192), financiado con 6865.5 € por la Consellería de Educación, del 01/01/2008 al 31/12/2008.
Quisiera recordar el apoyo brindado por el Grupo de Óptica y Ciencias de la Visión en la toma de datos durante los ensayos y en el desarrollo de un método óptico para la medición de vibraciones estructurales, ya que, sin estas herramientas este trabajo no hubiera sido posible.
No me puedo olvidar de los que día a día han soportado los avatares de este trabajo y el “zumbido sempiterno de ese ordenador infernal”: mis compañeros Isidro y Emilio. Gracias por animarme, asesorarme, apoyarme y consolarme siempre que ha sido necesario. Sin vosotros esto habría sido mucho más duro.
Por último, quiero dar las gracias a David por creer y confiar en mí mucho más que yo misma. Sin ti nada de esto tendría sentido.


RESUMEN
Las acciones accidentales provocan esfuerzos sobre las estructuras que es necesario tener en cuenta en su dimensionamiento. En este sentido, las normativas relacionadas con el diseño estructural de los edificios incorporan en sus versiones más recientes consideraciones relativas a este tipo de acciones, generalmente ligadas a cargas estáticas equivalentes. No obstante, las indicaciones dadas en cada una de ellas para el choque accidental de un coche son muy diferentes para un mismo tipo de impacto. Además, no existen trabajos de investigación sobre impactos provocados por vehículos sobre estructuras de edificación. Todo ello justifica la necesidad y relevancia del trabajo que se desarrolla en esta tesis.
El objetivo general de este trabajo es la determinación de la carga estática equivalente a un impacto en unas condiciones particulares. Dado que los impactos contra edificios se producen dentro del entramado urbano o en el interior de un aparcamiento, las velocidades a considerar son bajas, entendiendo como tal las comprendidas entre 10 y 30 km/h. Con el fin de abarcar diferentes posibilidades, se han utilizado diferentes tipos de coches en el estudio del impacto, con diferentes masas, características estructurales y amortiguadoras. Además, en uno de estos coches se ha colocado una masa en su interior para evaluar la influencia del incremento de masa en un mismo vehículo.
Con el fin de realizar una primera aproximación numérica al problema, se ha implementado un modelo matemático basado en elementos finitos, con condiciones de contorno ideales para el pilar y con un modelo de coche realista. Con este modelo se han realizado simulaciones estáticas con diferentes fuerzas horizontales situadas sobre el pilar en el punto de impacto y simulaciones dinámicas en las que se han utilizado diferentes velocidades iniciales en el coche. La carga estática equivalente se ha obtenido como comparación entre estos dos tipos de simulaciones, utilizando como parámetro de comparación el máximo desplazamiento en el pilar. Como resultado de

estas simulaciones se han obtenido cargas estáticas equivalentes muy superiores a las indicadas por las normativas analizadas.
Con el fin de comprobar los resultados obtenidos hasta el momento se ha realizado una campaña de ensayos a escala real en los que se ha provocado el impacto de un coche contra un pilar de hormigón previamente tesado para simular la compresión debida a una estructura superior. Durante los impactos, el pilar ha estado monitorizado con acelerómetros, captadores de desplazamientos y galgas extensométricas. Además, se ha utilizado una cámara de alta velocidad durante los ensayos y se ha desarrollado un procedimiento para medir el desplazamiento del pilar a partir de las imágenes obtenidas con esta cámara. Tras la realización de estos ensayos se ha comprobado que los captadores no han sido capaces de registrar correctamente el movimiento del pilar, mientras que sí lo ha hecho la cámara de alta velocidad.
Una vez concluida la fase experimental se ha implementado un nuevo modelo de elementos finitos que refleja las condiciones en que se han realizado los ensayos. En este modelo se ha utilizado un material para el hormigón de última generación que ha sido diseñado específicamente para representar el comportamiento del hormigón sometido a cargas impulsivas. Además, este modelo ha sido ajustado para conseguir que su comportamiento durante el impacto sea el mismo que se ha medido durante los ensayos.
El procedimiento seguido para obtener las cargas estáticas equivalentes con este nuevo modelo ha sido el mismo que el utilizado en las simulaciones previas, solo que en este caso el parámetro de comparación ha sido la máxima curvatura del pilar, en lugar del máximo desplazamiento. Además, se han obtenido otros resultados interesantes como la variación de la fuerza en el contacto o el daño en el hormigón como consecuencia del impacto.
Los resultados obtenidos muestran que, aparte de la velocidad de impacto, la característica que más influye en los resultados obtenidos es el diseño estructural del vehículo y no la masa del mismo, como podría pensarse. En general, los vehículos más modernos provocan consecuencias menores en

la estructura durante un impacto que los vehículos más antiguos. Esto es debido a la incorporación de materiales y tecnologías de amortiguamiento que permiten disipar gran parte de la energía durante el impacto evitando así su transmisión a la estructura.
En cuanto a las cargas estáticas equivalentes obtenidas y su comparación con la normativa analizada, se ha determinado que las recomendaciones dadas por las Partes 1.7 y 2.7 respectivamente del Eurocódigo 1 no son seguras, ya que son inferiores a las obtenidas en este trabajo para cualquier coche y velocidad. Sin embargo, las indicaciones que aparecen en los Anexos C y A de las Partes 1.7 y 2.7 respectivamente del Eurocódigo 1 quedan del lado de la seguridad en casi todos los supuestos. Únicamente en el caso de un coche con el chasis exento y para velocidades superiores a 20 km/h, estos valores son inferiores a los obtenidos.
Por otra parte, el análisis del daño en el hormigón muestra que únicamente para velocidades superiores a 20 km/h y para un vehículo sin los sistemas de amortiguación más modernos, existe una sección en el pilar que resulte gravemente dañada. Esto significa que, si únicamente se tienen en cuenta los impactos provocados por vehículos fabricados en los últimos 10 años, no sería necesario considerar estas acciones accidentales, ya que ello no modificaría el diseño de la sección resistente del pilar. No obstante, como medida de seguridad, resulta recomendable considerar la posibilidad de que circule cualquier tipo de coche, con lo que la carga estática a considerar sería del orden de 500 kN para una velocidad de 30 km/h.
Sin embargo, es de esperar que estos antiguos modelos de coches dejen de circular y que las nuevas líneas de diseño de sistemas de amortiguación sean todavía mejores que las ya existentes, con lo que la consideración de este tipo de acciones sobre la edificación tenderá a desaparecer en el futuro.


ABSTRACT
Accidental actions cause stresses on the structures that must be taken into account in the designing process. The latest regulations related to the structural design of buildings include some considerations regarding this type of action, which are usually associated with equivalent static loads. However, the indications given in these codes for car crashes are very different for the same kind of impact. Moreover, there isn’t any research regarding car crash against building structures. All these considerations justify the need and relevance of the work being done in this thesis.
The overall objective of this study is to determine the static load that is equivalent to an impact on some particular conditions. Since the impacts on buildings happen inside a city or in a car park, the speeds to take into account are low, i.e., speeds between 10 and 30 km/h. In order to cover various possibilities, we have used different types of cars in the study of the impact, with different masses, structural and buffer characteristics. In addition, we have placed a box inside of one of the cars to evaluate the influence of mass increase on the vehicle.
To perform a primary numerical approach to the problem, we have made a finite element model with ideal boundary conditions for the column, and a realistic car model. Using this model, some simulations have been performed with different static horizontal forces located at the impact point and also some dynamic simulations in which we have used different initial velocities in the car. The equivalent static load was obtained through a comparison between static and dynamic simulations, using the maximum displacement on the pillar as the benchmark. The obtained equivalent static loads through this first approach were much higher than those prescribed by the regulations analysed.
To verify the results obtained so far, a group of full scale car crash tests have been completed in which the impact of a car against a concrete column was performed. The column was post-tensioned to simulate the compression

due to an upper structure. During these tests, the pillar was monitored with accelerometers, linear displacement sensors and strain gauges. Furthermore we have developed a procedure to measure the displacement of the column from the images obtained with a high-speed camera. The results of these tests have shown that the linear displacement sensors were unable to properly register the movement of the column, whereas it has done by using the high-speed camera.
Once the experimental phase was implemented, a new finite element model was performed under the same conditions in which the previous tests were completed. On this model a last generation concrete model was used. This material model was specifically designed to represent the behaviour of concrete under impulsive loads. In addition, this model was adjusted to ensure that its behaviour during impact is the same as was measured during the tests.
The procedure followed to obtain the equivalent static loads with this new model was the same as that used in previous simulations, but in this case the benchmark was the maximum curvature of the column, instead of the maximum displacement. In addition, other interesting results have been obtained, e.g. the variation of force in the contact or damage to the concrete due to the impact.
The results show that aside from impact velocity, the characteristic that most influences the results is the structural design of the vehicle and not the mass, as one might think. In general, more modern vehicles cause minor consequences in the structure during an impact than older vehicles. This is due to the incorporation of damping materials and technologies that enable a lot of energy to dissipate during the impact, thereby preventing transmission to the structure.
In terms of the obtained equivalent static loads and their comparison with the analysed codes, it was determined that the recommendations given by Parts 1.7 and 2.7 respectively of Eurocode 1 are not safe enough, as they are lower than those obtained in this work for any car and speed. However,

the instructions on Annex C and A of the Parts 1.7 and 2.7 respectively of Eurocode 1 are probed to be safe in almost all cases. Only for a car with separated chassis and velocity higher than 20 km/h, these values are lower than those obtained.
Moreover, the analysis of concrete damage shows that only at speeds above 20 km/h and for a vehicle without the latest shock absorber systems, there is a seriously damaged section on the column. However, as a security measure, it is advisable to consider the possibility that any kind of car can move around, so that the static load to consider is in the region of 500 kN for a speed of 30 km/h.
However, it is hoped that these old models of cars stop circulating and the design of new lines of shock absorber systems are still better than existing ones, so that consideration of such actions on buildings will tend to disappear in the foreseeable future.


ÍNDICE DE CONTENIDOS
CAPÍTULO 1. INTRODUCCIÓN..................................................................1
1.1. MOTIVACIÓN ........................................................................................1
1.2. OBJETIVOS Y METODOLOGÍA...............................................................14
CAPÍTULO 2. ANTECEDENTES ..............................................................17
2.1. GENERALIDADES ...............................................................................17
2.2. ANÁLISIS TEÓRICOS SIMPLIFICADOS....................................................19
2.3. DISCRETIZACIÓN ESPACIAL: EL MÉTODO DE LOS ELEMENTOS
FINITOS .............................................................................................39
2.4. INTEGRACIÓN TEMPORAL NUMÉRICA...................................................51
2.5. CARACTERÍSTICAS PARTICULARES DEL HORMIGÓN ARMADO ................57
2.6. MODELIZACIÓN DEL HORMIGÓN ARMADO.............................................67
2.7. UNA VISIÓN GENERAL DEL MODELO MATERIAL CSCM............................78
2.7.1. SUPERFICIE DE PLASTIFICACIÓN ................................................................79
2.7.2. FORMULACIÓN DEL DAÑO ............................................................................90
2.7.3. FORMULACIÓN DE LOS EFECTOS DE LA VELOCIDAD DE
DEFORMACIÓN ...............................................................................................99
2.7.4. ENDURECIMIENTO MIXTO ...........................................................................103

2.8. PROYECTILES ................................................................................. 105
2.9. TRABAJOS EXPERIMENTALES........................................................... 110
2.10. NECESIDAD DE UN ESTUDIO ALTERNATIVO ........................................ 115
CAPÍTULO 3. PRIMERA APROXIMACIÓN NUMÉRICA ....................... 119
3.1. INTRODUCCIÓN ............................................................................... 119
3.2. MODELIZACIÓN TRIDIMENSIONAL...................................................... 122
3.2.1. MODELO PARA EL PILAR DE HORMIGÓN.................................................. 122
3.2.2. SIMULACIONES REALIZADAS CON EL MODELO DEL PILAR.................... 131
3.2.3. MODELO PARA EL VEHÍCULO.....................................................................139
3.2.4. SIMULACIONES DINÁMICAS REALIZADAS Y RESULTADOS
OBTENIDOS...................................................................................................144
3.3. CONCLUSIONES Y REPLANTEAMIENTO DEL PROBLEMA ...................... 160
CAPÍTULO 4. PARTE EXPERIMENTAL A ESCALA REAL .................. 165
4.1. INTRODUCCIÓN ............................................................................... 165
4.2. BASTIDOR DE PRUEBAS ................................................................... 166
4.3. DOTACIÓN DE VELOCIDAD Y DIRECCIÓN EN EL VEHÍCULO................... 176
4.4. ESPÉCIMEN DE ENSAYO ................................................................... 181
4.5. PUESTA EN CARGA DEL ESPÉCIMEN ................................................. 183
4.6. VEHÍCULOS PARA LOS ENSAYOS ...................................................... 186

4.7. INSTRUMENTACIÓN UTILIZADA ..........................................................187
4.8. NUEVA TÉCNICA DE MEDICIÓN DE DESPLAZAMIENTOS DINÁMICOS .......190
4.8.1. LIMITACIONES DE LA INSTRUMENTACIÓN UTILIZADA ............................190
4.8.2. NUEVA TÉCNICA DESARROLLADA.............................................................191
4.9. ENSAYOS REALIZADOS.....................................................................194
4.10. RESULTADOS OBTENIDOS.................................................................197
4.11. CONCLUSIONES ...............................................................................208
CAPÍTULO 5. NUEVO MODELO DE ELEMENTOS FINITOS.................209
5.1. MODELO DE ELEMENTOS FINITOS PARA PILAR Y BASTIDOR.................209
5.1.1. DESCRIPCIÓN DE LA GEOMETRÍA Y PARTES DEL MODELO ..................209
5.1.2. DESCRIPCIÓN DEL MALLADO .....................................................................210
5.1.3. CONDICIONES DE CONTORNO Y LIGADURAS ENTRE LAS PARTES......210
5.1.4. MODELO MATERIAL PARA EL HORMIGÓN.................................................211
5.1.5. MATERIALES PARA EL RESTO DE COMPONENTES .................................215
5.1.6. PRECARGA Y TIPO DE CÁLCULO REALIZADO ..........................................215
5.1.7. CONTACTOS..................................................................................................218
5.2. MODELOS DE ELEMENTOS FINITOS UTILIZADOS COMO VEHÍCULOS ......220
5.3. AJUSTE DEL MODELO DINÁMICO........................................................221
5.3.1. INTRODUCCIÓN Y OBJETIVOS....................................................................221

5.3.2. AJUSTE DEL MODELO A PARTIR DE ANÁLISIS MODAL Y ANÁLISIS
DINÁMICO DEL IMPACTO.............................................................................223
CAPÍTULO 6. RESULTADOS OBTENIDOS .......................................... 229
6.1. PRECISIÓN DE LOS RESULTADOS...................................................... 229
6.2. RELAJACIÓN DINÁMICA.................................................................... 231
6.3. SIMULACIONES ESTÁTICAS .............................................................. 232
6.4. SIMULACIONES DINÁMICAS .............................................................. 237
6.5. CARGA ESTÁTICA EQUIVALENTE....................................................... 250
CAPÍTULO 7. CONCLUSIONES Y FUTUROS DESARROLLOS........... 263
ANEXO 1: PROYECTOS Y PUBLICACIONES ASOCIADOS A ESTE
TRABAJO............................................................................................ 271
ANEXO 2: VALIDACIÓN DE LOS MODELOS DE VEHÍCULOS ............... 329
REFERENCIAS .......................................................................................... 343

1
CAPÍTULO 1. INTRODUCCIÓN
1.1. MOTIVACIÓN
El trabajo que se desarrolla en esta memoria parte del estudio del actual Código Técnico de la Edificación (CTE) [CTE, 2006]. Esta norma, vigente desde 2006, incluye entre las acciones accidentales a considerar en la edificación las debidas a impacto de vehículos, sumándose así a las iniciativas tomadas en este sentido por las normativas europeas [EC1-1, 2001; EC1-7, 2003]. Además incluye la posibilidad de la representación de los efectos del impacto de un cuerpo sobre un edificio mediante una carga estática equivalente y en concreto establece esta carga para vehículos de hasta 30 kN de peso total en 50 kN en la dirección paralela a la vía y 25 kN en la dirección perpendicular, no actuando simultáneamente.
No se da ninguna indicación sobre la velocidad de impacto para la que esa carga estática es equivalente. Estas acciones representan, según la CTE, el impacto de un vehículo distinto a una carretilla elevadora (para las que se dan otras indicaciones) contra un edificio, tanto si el impacto se produce desde el interior como desde el exterior del edificio.
La carga estática equivalente es un concepto que se utiliza en el análisis sísmico de las estructuras y se define, para un instante t, como la fuerza estática externa que produce el mismo desplazamiento lateral en la estructura que el resultante de la acción dinámica en ese mismo instante

Capitulo 1
2
[Chopra, 2001]. La carga estática más restrictiva se obtendrá cuando se elija el instante en el que el desplazamiento provocado por la acción dinámica sea máximo, y entendemos que este es el valor al que se refieren tanto el CTE como el resto de los documentos a los que nos referiremos en esta sección.
Tras el análisis de estas indicaciones se plantearon algunas cuestiones: en primer lugar la validez de los valores dados para representar un impacto tal como el que se ha definido, y en segundo lugar la ausencia de una velocidad para el vehículo en la descripción del impacto para el que es equivalente. A este respecto, resulta evidente que la velocidad en el momento del impacto influirá de alguna manera en la carga estática equivalente. Estas cuestiones han sido las que han impulsado el estudio en sus primeras etapas.
El primer trabajo consistió en realizar una búsqueda bibliográfica en la normativa más relevante relacionada con impactos sobre estructuras. Se relatan a continuación los hallazgos más importantes, organizados en función de la nacionalidad de la norma y convenientemente analizados [Ferrer, 2010]. Además, con el fin de comparar las indicaciones que se dan en estas normativas, se han aplicado al caso concreto de un impacto provocado por un vehículo con velocidad de 20 km/h y masa de 3000 kg sobre una estructura.
NORMATIVA EUROPEA
Eurocódigo 1: Acciones en estructuras. Parte 1-1: Acciones generales-Densidades, peso propio, cargas impuestas en edificios [EC1-1-1, 2001].
En el Anexo B, que es únicamente informativo, se dan expresiones para el diseño de barreras protectoras para aparcamientos. Se especifica en este anexo que la fuerza característica necesaria para soportar el impacto de un vehículo se puede calcular a través de la expresión:
20.5 /c c bF m v (1.1)

Introducción
3
donde m es la masa del vehículo (kg), v es la velocidad inicial del vehículo (m/s) en dirección perpendicular a la barrera, c es la deformación
del vehículo (mm) y b es la deformación de la barrera (mm).
Además, se indican los valores que se deben tomar en el caso de aparcamientos diseñados para vehículos con masa inferior a 2500 kg. Estos valores son: m= 1500 kg, = 4.5 m/s = 16.2 km/hv y c 100 mm . Con ello y
suponiendo una barrera rígida indeformable b 0 , se obtiene un valor para
la fuerza estática equivalente de 150 kN, correspondiente a vehículos con masa de hasta 2500 kg. Para aparcamientos diseñados para vehículos con masas mayores, se debe tomar la masa real del vehículo.
Eurocódigo 1: Acciones en estructuras. Parte 1-7: Acciones generales-Acciones accidentales [EC1-1-7, 2003].
Esta parte del Eurocódigo es la que se dedica expresamente a las acciones accidentales y a la que remiten el resto de documentos del Eurocódigo en cuanto a impactos.
Se define el impacto en esta norma como un proceso determinado por la velocidad y la distribución de masas del objeto que impacta, el comportamiento en deformación y el amortiguamiento de ambos elementos, el que impacta y el que recibe el impacto. Esta norma permite representar la acción debida al impacto como una fuerza estática que provoque los mismos efectos en la estructura.
Se consideran dos tipos de impacto:
Impacto blando: Estructuras diseñadas para absorber la energía del impacto mediante deformaciones elasto-plásticas de sus miembros. En estas estructuras las cargas estáticas equivalentes se pueden determinar considerando tanto la capacidad de deformación como el límite elástico del material de la estructura.

Capitulo 1
4
Impacto duro: Estructuras en las que la energía del impacto se disipa principalmente en el objeto que impacta. Para este tipo de impacto la norma propone unas cargas estáticas equivalentes que dependen del tipo de vehículo que impacta y de la velocidad del impacto. Además, distingue en estas cargas propuestas entre la dirección de la vía y la dirección perpendicular a la misma, indicando que no deben considerarse simultáneamente.
Esta clasificación de los impactos ya se recoge en documentos anteriores en cuanto a estructuras de hormigón [CEB, 1998], aunque en ese caso la definición era, curiosamente, la contraria.
Para impactos de vehículos sobre estructuras (impacto duro) se dan valores para la carga estática equivalente en función del tipo de vía (con limitación de la velocidad) y del tipo de vehículo que puede circular por ella. Para el caso de aparcamientos situados en edificios, con una velocidad máxima de 20 km/h y con circulación de coches, las cargas estáticas equivalentes que se proponen varían entre 50 kN y 100 kN en la dirección de la circulación de la vía, siendo 50 kN la magnitud recomendada. Para la dirección perpendicular a la vía los valores propuestos varían entre 25 kN y 50 kN, siendo recomendable el valor de 25 kN.
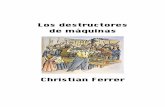
Además, estas cargas se aplicarán sobre una superficie rectangular de 0.25 m de altura y una anchura de 1.5 m o la anchura del elemento sobre el que impacta si es menor. El centro de esta superficie estará situado a una altura de 0.6 m sobre el nivel de rodadura para los elementos verticales (Fig. 1.1 (dcha.)).
Por otra parte, hay que tener en cuenta que es bastante frecuente el que los pilares de un aparcamiento sean apantallados con el fin de aumentar la superficie útil de la zona de aparcamiento sin disminuir las características resistentes de la sección del pilar. En estos casos la dirección paralela a la vía coincide con la del eje de menor inercia de la sección (Fig. 1.1 (izda.)) y como consecuencia nos encontramos en la situación más desfavorable frente a un

Introducción
5
impacto, ya que la mayor carga, tal como describe la norma, deberá aplicarse de en esta dirección, tal como se muestra en la Fig. 1.1 (dcha.).
Fig. 1.1: Disposición constructiva típica de (vista en planta), en la que se observa que la dirección de la vía es perpendicular al eje de menor inercia de la sección de los pilares (en negro) (izda.) y disposición de las cargas estáticas
equivalentes para este tipo de aparcamiento (dcha.).
Por otra parte, en el Anexo C (informativo) de esta norma se proponen procedimientos simplificados para realizar un cálculo dinámico del problema. Para el caso de impacto duro y suponiendo que el objeto que impacta se deforma linealmente durante la fase de impacto, se proponen las siguientes expresiones para determinar la máxima fuerza de interacción:
maxF v k m (1.2)
donde k es la rigidez equivalente del elemento que recibe el impacto, que en este caso es el vehículo. En este documento se indica un valor estimado para la rigidez equivalente de 300 kN/m.

Capitulo 1
6
Eurocódigo 1: Acciones en estructuras. Parte 2-7: Acciones accidentales debidas a impactos y explosiones [EC1-2-7, 1998].
Se define el proceso del impacto como determinado por la distribución de masas, el comportamiento en deformación, las características amortiguadoras y las velocidades iniciales, tanto del elemento que impacta como de la estructura. Además, para determinar las fuerzas que actúan en el contacto debe considerarse un sistema conjunto que incluya tanto la estructura como el objeto que impacta.
Para el caso concreto de impactos sobre elementos estructurales verticales se especifican las cargas horizontales de diseño que deben tomarse en función del tipo de vía de que se trate. Para aparcamientos situados en edificios estas cargas son 40 kN en la dirección de la vía y 25 kN en la dirección perpendicular, no actuando simultáneamente.
Por otra parte, en el Anexo A, que es únicamente informativo, se ofrece un punto de vista alternativo para el estudio avanzado de las consecuencias de un impacto. En este documento las indicaciones para obtener la máxima fuerza desarrollada durante el impacto coinciden exactamente con las dadas en el Anexo C de la parte 1.7 del Eurocódigo 1, que ya han sido descritas y discutidas en profundidad anteriormente en este documento, por lo que no se incluye de nuevo este desarrollo en este punto.
NORMATIVA AMERICANA
En cuanto a la normativa americana en este sentido, las normas relacionadas con la edificación y con las estructuras metálicas y de hormigón en general muestran una vaga regulación en cuanto a los impactos, tal como se detalla a continuación, organizadas en función del organismo que las publica.
En el American Institute of Steel Construction, Inc. se puede encontrar el código para la estandarización de las estructuras metálicas en edificación y puentes [AISC 303, 2005] en la que no se tienen en cuenta las acciones

Introducción
7
debidas a este tipo de impactos. Por otra parte este organismo publica las nuevas especificaciones para acero estructural en edificación [AISC 360, 2005] que sustituye a la tradicional “Load and Resistance Factor Design” [LRFD, 1995] y que remite al documento “Minimum design loads for building and other structures” [ASCE/SEI 7-05, 2006] en cuanto a las cargas de diseño. En este documento se indica un valor de 26.7 kN para la carga horizontal que debe resistir una barrera de protección de un aparcamiento.
El American Concrete Institute incluye la norma “Análisis and Design of Reinforced and Prestresed-Concrete Guideway Structures” [ACI 358.1-R92, 1992] en la que se propone una carga estática equivalente de 1000 kN para simular el efecto de un impacto en una vía de alta velocidad y con vehículos de gran masa, por lo que este valor es difícilmente comparable a los mencionados hasta ahora en este estudio. Otro código que podemos encontrar dentro de este organismo es el “Building Code Requeriments for Structural Concrete and Commentary” [ACI 318S-05, 2005], que indica que deben considerarse las cargas debidas a impacto pero no la manera. Por último, se encuentra en proceso de redacción la ACI 370R “Guidelines for the design of concrete structures for blast effects” [ACI 370R] en la que se prevé que se incorporen indicaciones sobre este tema.
El Internacional Code Council publica el “International Building Code” [IBC, 2009] en el que, en el apartado 1607.7.3 dedicado a las barreras situadas en aparcamientos y que forma parte del Capítulo 16: “Structural Design”, se indica que éstas deberán ser diseñadas para resistir una carga puntual de 26.7 kN aplicada de forma horizontal sobre la barrera. Esta carga coincide con la indicada en la norma ASCE/SEI 7-05 [ASCE/SEI 7-05, 2006]. Por otra parte, en el apartado 1607.8 del “International Building Code” se especifica que se deben tener en cuenta las cargas debidas a impacto en el diseño estructural, pero no se dan detalles para el caso del impacto debido a una colisión de un vehículo.

Capitulo 1
8
NORMATIVA ALEMANA
La norma DIN 1055-9:2003-08 “Acciones en estructuras. Acciones accidentales” [DIN 1055-9: 2003-08] establece una carga horizontal sustitutiva para distintos tipos de impactos causados por vehículos, en función del tipo de vía o lugar en el que se produce el impacto y en algunos casos se diferencia entre distintas masas o velocidades del vehículo que impacta.
En concreto, para los aparcamientos, se diferencia en función de la masa del vehículo para la que han sido diseñados. Para una masa de diseño inferior a 2.5 t, la carga estática equivalente en la dirección de la vía es de 40 kN, mientras que para una masa superior esta carga es de 100 kN.
En cuanto a la circulación en zona urbana, se diferencian las zonas en función de la velocidad con la que se puede circular, de forma que en una vía con velocidad limitada a 50 km/h, la carga estática equivalente en la dirección de la vía es de 500 kN en el caso de que se consideren impactos contra esquinas de edificios y 250 kN en el resto de los casos.
NORMATIVA INGLESA
La norma BS6399-1:1996 “Acciones en edificación. Parte 1: Peso propio y cargas impuestas” [BS 6399-1:1996, 2002] presenta exactamente la misma recomendación que aparece en el Eurocódigo 1, Parte 1-1, por lo que no se repetirá aquí la descripción que se hizo sobre esta recomendación.
Con el fin de comparar las indicaciones dadas por las normas analizadas en este documento, estudiaremos su aplicación a un caso concreto. Para ello, analizaremos las consecuencias de un impacto tipo según cada uno de los códigos analizados. El impacto elegido será el provocado por un vehículo con una masa de 3000 kg a una velocidad de 20 km/h sobre una parte de una estructura de edificación situada en un aparcamiento. Se incluirán también las acciones que estas normas prevén sobre barreras en aparcamientos, ya que, aunque no se trate de elementos estructurales sometidos a otras cargas

Introducción
9
adicionales, se establece también en estos casos una equivalencia entre una acción dinámica y otra estática y es precisamente esta equivalencia uno de los objetivos del estudio que se está realizando en cuanto a las normativas relacionadas.
Además, nos centraremos en la carga a aplicar en la dirección de la vía, por ser mayor que la carga a aplicar en la dirección perpendicular a la vía, según todas las normativas estudiadas.
NORMATIVA ESPAÑOLA
Código técnico de la edificación [CTE, 2006]
Según la normativa española, para un impacto provocado por un vehículo con esa masa y a esa velocidad, la carga estática equivalente recomendada sería de 50 kN en la dirección de la vía.
NORMATIVA EUROPEA
Eurocódigo 1: Acciones en estructuras. Parte 1-1: Acciones generales-Densidades, peso propio, cargas impuestas en edificios [EC1-1-1, 2001].
La aplicación de esta parte del Eurocódigo 1 implica la aplicación de la expresión (1).
Para un vehículo con masa 3000 kg, como el del caso concreto que hemos decidido estudiar, hemos de suponer que se sitúa en un aparcamiento diseñado para este tipo de vehículos. Por tanto, siguiendo las indicaciones de la norma, debemos tomar la masa real del vehículo. Además la velocidad de estudio es = 5.5 m/s = 20 km/hv , ligeramente superior a la indicada por la norma en el caso anterior, por lo que debemos suponer que la deformación del vehículo también será algo mayor que la indicada en el caso anterior. Por tanto tomaremos en este caso: 3000 kgm , c 150 mm y b 0 , con lo que
la fuerza estática equivalente quedaría:

Capitulo 1
10
20.5 / 308 c bF m v kN (1.3)
Eurocódigo 1: Acciones en estructuras. Parte 1-7: Acciones generales-Acciones accidentales [EC1-1-7, 2003].
Por aplicación directa de la norma, la carga estática equivalente recomendada es de 50 kN en la dirección de la vía.
No obstante, si aplicamos las recomendaciones dadas en el Anexo C de esta norma, utilizaremos la expresión (1.2) y el valor estimado en este documento para la rigidez elástica equivalente del vehículo: 300 /k kN m . Con este valor y los valores que hemos tomado para la velocidad
20 / 5.5 /v km h m s y la masa 3000 m kg del vehículo, la máxima fuerza desarrollada durante el impacto según esta parte del Eurocódigo 1 será:
166 F v k m kN (1.4)
Eurocódigo 1: Acciones en estructuras. Parte 2-7: Acciones accidentales debidas a impactos y explosiones [EC1-2-7, 2001].
Siguiendo las indicaciones dadas en la parte general, la carga estática equivalente será de 40 kN en la dirección de la vía. No obstante, si aplicamos las recomendaciones dadas en el Anexo A para un estudio avanzado del impacto, nos encontramos con el mismo resultado que hemos obtenido para el Anexo C de la Parte 1.7 del Eurocódigo 1, ya que el texto de ambas normas coincide. Por tanto, el valor de la máxima fuerza desarrollada durante el impacto será de 166 kN.
NORMATIVA AMERICANA
Tanto el “International Building Code” [IBC, 2009] como el “Minimum design loads for building and other structures” [ASCE/SEI 7-05, 2006] dan un valor de 26.7 kN para una barrera de aparcamiento, independientemente de la masa o la velocidad del vehículo que impacta.

Introducción
11
NORMATIVA ALEMANA [DIN 1055-9: 2003-08]
Para un aparcamiento diseñado para vehículos con masa superior a 2.5 t, la carga estática equivalente es de 100 kN, independientemente de la velocidad del vehículo.
NORMATIVA INGLESA [BS 6399-1:1996, 2002]
Las indicaciones dadas en la norma BS6399-1:1996 coinciden exactamente con las dadas en la Parte 1.1 del Eurocódigo 1; por tanto, la carga estática equivalente según este código inglés será de 308 kN.
Por último se incluye en la tabla 1.1 un resumen de los datos indicados y de los calculados a través de las expresiones dadas con el fin de clarificar y comparar los resultados obtenidos según las indicaciones de cada una de las normas.
Tabla 1.1: Resumen de los valores obtenidos para la carga estática equivalente (CEE) según cada norma para una velocidad inicial de 20 km/h y una masa de 3000 kg, con 0b ,
150 mm y k= 300 kN/m
NORMA Expresión Masa del vehículo (kg)
Velocidad de impacto (km/h)
CEE (kN)
BARRERAS PROTECTORAS EC1-1-1 ANEXO B (1.1) 3000 20 308
BS6399-1:1996 (1.1) 3000 20 308 ASCE/SEI 7-05 -------- No se indica No se indica 26.7
IBC -------- No se indica No se indica 26.7 ESTRUCTURAS DE EDIFICACIÓN
EC1-2-7 -------- No se indica No se indica 40 EC1-1-7 -------- No se indica < 20 50
CTE -------- 3000 No se indica 50 DIN 1055-9:2003-08 -------- > 2500 No se indica 100 EC1-1-7 ANEXO C (1.2) 3000 20 166 EC1-2-7 ANEXO A (1.2) 3000 20 166

Capitulo 1
12
En esta tabla se han separado los valores obtenidos para barreras protectoras y los obtenidos para estructuras de edificación, con el fin de evitar la comparación entre ellos ya que se trata de elementos muy diferentes. A pesar de todo, en ambos elementos se establece una comparación entre acciones dinámicas y estáticas en las normativas estudiadas, motivo por el cual se ha considerado interesante realizar el análisis de ambos elementos.
Con los resultados obtenidos en esta tabla se observa la gran disparidad en los valores obtenidos para un mismo impacto, tanto para los valores obtenidos para estructuras de edificación como para los obtenidos para barreras protectoras. Esta disparidad de valores puede ser de hasta el triple en el caso de estructuras y de alrededor de 10 veces en el caso de barreras protectoras. A pesar del llamativo caso de las barreras de protección, consideramos más importantes las diferencias encontradas en cuanto a las estructuras de edificación, ya que son las responsables de la seguridad estructural del edificio.
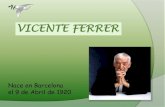
Con el fin de tener una visión más amplia de las recomendaciones dadas por los códigos analizados en cuanto a impactos contra estructuras, en la figura 1.2 se presenta una comparación entre estas recomendaciones para distintas velocidades y masas del vehículo que impacta.
En la parte de arriba de la figura 1.2 se analiza la variación de la carga estática equivalente con la masa para 3 velocidades diferentes, mientras que en la parte de abajo se analiza su variación con la velocidad para 3 masas diferentes. En este punto hay que recordar que las recomendaciones dadas por el Anexo A de la parte 2.7 del Eurocódigo 1 coinciden con las dadas por el Anexo C de la parte 1.7 del mismo Eurocódigo, por lo que en este análisis comparativo únicamente se ha incluido este último.
El primer resultado remarcable es que, en general, las cargas dadas por el Anexo C de la parte 1.7 del Eurocódigo 1 son significativamente mayores que el resto para una velocidad igual o mayor que 20 km/h. Únicamente para 10 km/h y masa menor que 2000 kg, todos los valores dados por las distintas

Introducción
13
normativas son del mismo orden. Para velocidades mayores, las cargas dadas por el Anexo C de la parte 1.7 del Eurocódigo 1 se separan del resto incrementando su valor, mientras que el resto permanece prácticamente invariable. Para una masa mayor de 2000 kg, los valores dados por la norma DIN 1055-9 también se incrementan hasta un valor similar al dado por el Anexo C de la parte 1.7 del Eurocódigo 1 para una velocidad e 10 km/h, pero continúa siendo inferior para velocidades mayores. Los valores dados por la partes 1.7 y 2.7 del Eurocódigo 1 y el CTE son prácticamente coincidentes.
1000 2000 3000
40
80
120
160
200
240
280
1000 2000 3000
40
80
120
160
200
240
280
1000 2000 3000
40
80
120
160
200
240
280
5 10 15 20 25 30
40
80
120
160
200
240
5 10 15 20 25 30
40
80
120
160
200
240
5 10 15 20 25 30
40
80
120
160
200
240
VELOCIDAD 10 KM/H
CA
RG
A E
STÁ
TIC
A
EQ
UIV
ALE
NTE
(kN
)
MASA (kg)
VELOCIDAD 20 KM/H
MASA (kg)
VELOCIDAD 30 KM/H
MASA (kg)
CA
RG
A E
STÁ
TIC
A
EQ
UIV
ALE
NTE
(kN
)
VELOCIDAD (km/h)
MASA 1000 KG MASA 2000 KG
VELOCIDAD (km/h)
MASA 3000 KG
VELOCIDAD (km/h)
EC-1-1-7 ANEXO C EC-1-1-7 EC-1-2-7 DIN 1055-9 CTE
Fig. 1.2: Variación de la carga estática equivalente con la masa (arriba) y con la velocidad (abajo).
Finalmente, como resumen y como conclusión del análisis realizado, hay que resaltar que existe una gran disparidad en los resultados obtenidos por las normas estudiadas. Concretamente, los valores dados por las partes 1.7 y 2.7 del Eurocódigo 1 y el CTE son del mismo orden, mientras que los valores que se obtienen con el Anexo C de la parte 1.7 del Eurocódigo 1 y con la norma DIN 1055-9 son superiores. Únicamente para muy baja velocidad y

Capitulo 1
14
baja masa del vehículo, es decir, 10 km/h y masa menor de 2000 kg, todos los códigos dan valores semejantes. No obstante, velocidades mayores de 10 km/h son habituales en aparcamientos, por lo que son necesarias recomendaciones válidas también para estas velocidades. Todo ello lleva a la necesidad de realizar un estudio en profundidad acerca de la caracterización de un impacto a través de una carga estática equivalente, motivo por el que se plantea este trabajo.
1.2. OBJETIVOS Y METODOLOGÍA
El objetivo general de este trabajo es la determinación de la carga estática equivalente a un impacto provocado por un vehículo sobre un pilar de edificación. Además se obtendrán otros parámetros interesantes, como la variación de la fuerza en el contacto con el tiempo, la duración de este contacto o el valor máximo de esta fuerza. El estudio se centrará en bajas velocidades dado que un impacto contra un edificio se da, generalmente en entornos urbanos o aparcamientos. Los primeros tienen una velocidad limitada de 50 km/h que, con la nueva regulación de tráfico va a ser previsiblemente disminuida a 30 km/h, mientras que en un aparcamiento, a pesar de tener una velocidad recomendada de 10 km/h, frecuentemente se alcanzan velocidades superiores. Por tanto, el rango de velocidades considerado en este trabajo estará comprendido entre 10 y 30 km/h. Además se analizará la influencia de los diferentes tipos de vehículos, así como de las masas de estos vehículos.
El estudio se centrará principalmente en pilares rectangulares de hormigón armado, aunque se realizarán algunos cálculos aproximados para pilares metálicos. En cualquier caso, se estudiará el impacto contra el eje débil de la sección, con el fin de considerar la situación más desfavorable.

Introducción
15
Para una mejor aproximación al problema se realizarán ensayos a escala real en los que se provocará el impacto de un vehículo contra un pilar destinado a tal fin. Durante estos ensayos se monitorizará el pilar para conocer su comportamiento durante el impacto. Una vez analizados los resultados de los ensayos se realizará un modelo de elementos finitos que refleje las condiciones de contorno impuestas en el ensayo. Este modelo se ajustará utilizando los resultados obtenidos en los ensayos, de forma que su comportamiento sea el mismo que el del pilar ensayado.
No obstante, antes de empezar con la parte experimental del trabajo, se realizarán una primera aproximación numérica al problema a través de modelos de elementos finitos con condiciones de contorno ideales. A través de estos modelos se pretenden obtener cargas estáticas equivalentes para algunos de los casos a estudiar, con el fin de determinar si el trabajo es relevante o no. Además se determinarán algunos datos interesantes, como el estado final del vehículo o el comportamiento del pilar durante el impacto.
En general, la determinación de la carga estática equivalente se realizará en base a la comparación entre estados estáticos y dinámicos. En los primeros se aplicará una carga estática horizontal, siguiendo las indicaciones que dan algunas normas, junto con la carga transmitida por la estructura sobre el pilar. En el segundo caso, también junto con esta carga, se provocará el impacto del vehículo contra el pilar, en una de las caras correspondiente a su eje débil. El parámetro de comparación será el máximo desplazamiento del pilar en cada una de estas situaciones.
Junto con las cargas estáticas equivalentes se determinará la variación de las cargas en el contacto y la relación entre la máxima carga de contacto y la estática equivalente. Además, se compararán los resultados con los valores propuestos por las normativas analizadas en el apartado anterior, con el fin de determinar qué normativas están del lado de la seguridad y en qué condiciones.


17
CAPÍTULO 2. ANTECEDENTES
2.1. GENERALIDADES
Los impactos sobre las estructuras son acciones dinámicas de corta duración. El impacto ocurre cuando una fuerza, posición, velocidad o aceleración se modifica rápidamente y se genera un estado transitorio en la estructura estudiada. Esta rapidez se define en algunos textos como un tiempo de aplicación de la carga igual o menor que el periodo natural más grande del elemento estructural [Ugural, 2008; NOR 93]. Uno de los parámetros más importantes a la hora de definir un impacto es la velocidad a la que se produce. A partir de este valor se han propuesto diversas clasificaciones [Johnson, 1972; Zukas, 1982], a pesar de que otras variables de tipo geométrico o relacionadas con las propiedades del proyectil tienen una importancia decisiva. La síntesis que hace Goicolea [Goicolea, 2000] de estas clasificaciones, incluyendo los efectos sobre el material y completada en el rango de baja velocidad con las indicaciones dadas por Johnson [Johnson, 1972], es la siguiente:
Quasi estático (v < 0.36 km/h): Régimen elástico
Muy baja velocidad (0.36 km/h < v < 18 km/h): Efectos elásticos o deformaciones plásticas localizadas. La geometría estructural es la que

Capitulo 2
18
determina la existencia de estas regiones plásticas. Son relevantes los fenómenos dinámicos y las vibraciones estructurales.
Baja velocidad (18 km/h < v < 180 km/h): Pueden existir deformaciones plásticas localizadas. Son relevantes los fenómenos dinámicos y las vibraciones estructurales; la geometría estructural es predominante. Se puede analizar el efecto de las ondas de tensión.
Velocidad media (180 km/h < v < 1800 km/h): Deformaciones plásticas generalizadas. La propagación de las ondas de tensión se puede analizar con detalle.
Velocidad alta (1800 km/h < v < 7200 km/h): La resistencia viscosa del material aún tiene importancia.
Hipervelocidad (v > 7200 km/h): El material puede considerarse como un fluido hidrodinámico. Las ondas de tensión se convierten en ondas de choque.
Los impactos que vamos a considerar en este estudio serán los de baja o muy baja velocidad, según la clasificación anterior. Dentro de este tipo de impactos los fenómenos más relevantes que se deben considerar son los de dinámica y vibraciones estructurales, en los que la geometría estructural es predominante [Belytschko, 1983; Donea, 1978]. Otros fenómenos como el comportamiento no lineal del material, grandes desplazamientos, grandes deformaciones y contactos deben tenerse en cuenta adicionalmente. Estos fenómenos originan un carácter no lineal en la resolución de las ecuaciones implicadas, lo que se resuelve mediante procedimientos de discretización espacial e integración numérica.
La discretización espacial que se utiliza habitualmente en problemas de dinámica estructural se basa en el método de los elementos finitos [Belytschko, 1983; Donea, 1978], mientras que la resolución de los sistemas

Antecedentes
19
de ecuaciones diferenciales no lineales se realiza a través de métodos de integración implícita o explícita, en función de las características del problema a resolver. No obstante, históricamente se han propuesto algunos métodos de cálculo simplificados que, aunque son válidos únicamente para situaciones muy limitadas, ofrecen una visión intuitiva de los procesos desarrollados durante el impacto.
2.2. ANÁLISIS TEÓRICOS SIMPLIFICADOS
El análisis clásico de los impactos utiliza métodos energéticos y para ello asume una serie de suposiciones: el desplazamiento será proporcional a las fuerzas aplicadas, estáticas y dinámicas, se desprecian los efectos inerciales del elemento sometido a impacto, todos los cuerpos se comportan de manera elástica y no hay pérdidas de energía en el sistema. La representación idealizada del impacto siguiendo estas consideraciones consiste en una serie de muelles y masas que interactúan entre ellas. A partir de esta idealización se hace un balance energético entre el instante previo al impacto y el instante final, tomando como instante final aquél en el que el desplazamiento en el elemento estructural es máximo. Una de las aproximaciones más simples es la que considera Ugural [Ugural, 2008] y que consiste en considerar un único muelle que representa el movimiento de la estructura tras el impacto (figura 2.1). Con ello obtiene el máximo desplazamiento provocado por el impacto y se define el factor de amplificación dinámica (DAF) como la relación entre este máximo desplazamiento y el obtenido por aplicación estática de la carga.
Fig. 2.1: Representación más simple del impacto utilizando una sola masa y muelle

Capitulo 2
20
Para un objeto con peso P que se mueve horizontalmente con una velocidad v hasta que impacta contra un muelle, el balance energético implica que:
2 2max
1 12 2
P v kg
(2.1)
donde:
g: Aceleración de la gravedad
k: Constante elástica del muelle
max : Máximo desplazamiento experimentado por el muelle como
consecuencia del impacto.
Teniendo en cuenta que el desplazamiento obtenido en el caso de aplicar la carga P de forma estática es:
stPk
(2.2)
A partir de la ecuación (2.1) y utilizando la ecuación (2.2) podemos obtener una relación entre el máximo desplazamiento como consecuencia del impacto y el desplazamiento en el caso de una aplicación estática de la carga:
2 2 2
max st st stst
P v v v DAFk g g g
(2.3)
De forma que el factor de amplificación dinámica (DAF) resulta:
2
st
vDAFg
(2.4)
Y el valor máximo de la fuerza experimentada por el muelle es:
2
maxst
vF Pg
(2.5)

Antecedentes
21
Esta representación del impacto a través de masas y muelles que interaccionan se utiliza también con modelos matemáticos más complejos, como por ejemplo en el texto del “Comité Euro-International du Béton” (CEB) [CEB, 1998]. El modelo más simple que se utiliza en este documento consta de dos masas, m1 y m2, que impactan entre ellas, y dos muelles con constantes elásticas R1 y R2 (figura 2.2). Uno de los muelles simula la fuerza que se alcanza en el contacto entre las masas y el otro representa la deformación y la activación de las fuerzas resistivas en la estructura. Además se considera el carácter no lineal en cada uno de los muelles.
Fig. 2.2: Representación del impacto a través de un sistema de dos masas [CEB, 1998]
En función del comportamiento de los muelles se distingue entre dos tipos de impactos:
Impacto blando: La deformación u2 es mucho mayor que u1, lo que significa que la energía del cuerpo que impacta se transforma completamente en energía de deformación del cuerpo que impacta, mientras que el cuerpo que recibe el impacto permanece indeformable. Este tipo de impactos es el que se da cuando un vehículo choca contra una estructura rígida, en explosiones o en impactos producidos por el oleaje.
Impacto duro: Ocurre cuando el cuerpo que impacta es rígido y toda la energía del impacto se transforma en energía de deformación de la estructura. Este tipo de impactos ocurre cuando el proyectil es, por ejemplo, un misil.

Capitulo 2
22
Este tipo de clasificación ha sido utilizado posteriormente en otras normativas, [EC1-1-7, 2003] pero, curiosamente, la definición de cada uno de los tipos es la contraria a la que plantea el CEB.
Para representar el comportamiento de un vehículo, el CEB plantea el modelo unidimensional de varias masas conectadas por varios muelles y conectados a su vez a un punto fijo, tal como se muestra en la figura 2.3. Estos muelles simulan las distintas partes de la carrocería, amortiguadores y motor, que se conectan entre sí mediante muelles de comportamiento no lineal que simulan su rigidez tanto en el dominio elástico como en el plástico.
Fig. 2.3: Modelo mecánico unidimensional desacoplado para simular el comportamiento de un vehículo durante un impacto [CEB, 1998]
Para este problema, discretizado en i puntos, se dan las soluciones para velocidades, desplazamientos y fuerzas utilizando las ecuaciones de equilibrio. Para el caso de un impacto duro, la velocidad en el objeto que impacta es muy superior a la del que recibe el impacto, y aplicando esta condición a las ecuaciones de equilibrio, éstas se pueden desacoplar, de forma que la primera proporciona el valor de la fuerza en el contacto mientras que con el resto se pueden obtener las reacciones en la estructura.
Por otra parte, en este mismo documento se da una aproximación para el caso de un impacto horizontal contra un pilar sometido a las cargas transmitidas por la edificación. La aproximación consiste en comparar la energía cinética después del impacto con la energía de deformación en el pilar. La energía cinética después del impacto es:
2202kin
ME vM m
(2.6)

Antecedentes
23
donde:
M: Masa del proyectil
0v : Velocidad del proyectil
m: Masa participante de la columna, siendo definida por la ecuación:
2
0
L
m m x dx
donde:
m : masa distribuida
x : deformada del pilar en función de la coordenada longitudinal x
L: Longitud del pilar
Para un diseño dentro del rango elástico, la energía cinética deberá ser menor que la máxima energía de deformación que pueda alcanzar el pilar, que depende de las condiciones de contorno del mismo. Para obtener esta energía de deformación se supone que la ley de flectores correspondiente al impacto coincide con la que tendría el pilar con una carga estática aplicada y de forma que en su punto máximo el valor sea plM . Para un pilar biarticulado
la máxima energía de deformación en régimen elástico será:
2max, 6el pl
LE MEI
(2.7)
donde:
L: Longitud del pilar
EI: Rigidez a flexión del pilar
plM : Momento plástico de la sección

Capitulo 2
24
En caso de que la energía cinética del impacto sea mayor que máxima energía elástica, aparecerá una rotación plástica que deberá ser menor que la máxima admisible por el pilar, según la normativa considerada.
Para otras condiciones de contorno del pilar, cambiará la expresión (2.7) y, en el caso en que haya que tener en cuenta rotaciones plásticas, será necesario estudiar el número de ellas y comparar la rotación plástica total con la admisible por el pilar. No obstante, el resto del procedimiento permanece invariable.
Por otro lado, y teniendo en cuenta que el pilar realizará pequeños movimientos u oscilaciones alrededor de su posición inicial como consecuencia del impacto, podemos suponer que estas oscilaciones se pueden describir únicamente teniendo en cuenta el primer modo de vibración de la estructura, con el fin de simplificar el problema. Además, si consideramos estas oscilaciones como lineales, podemos aplicar el principio de superposición, considerando que el impacto transcurre en régimen elástico.
Con estas premisas realizaremos una simplificación de la estructura de estudio utilizando un modelo mecánico unidimensional que nos ayude a formular las expresiones matemáticas que rigen el movimiento del pilar. En este modelo debemos incluir, además del comportamiento elástico del material, el efecto de la viscoelasticidad, por el que las tensiones dependen de la velocidad a la que se producen las deformaciones.
Tomaremos el modelo de Kelvin-Voigt (figura 2.4), formado por un muelle lineal y un amortiguador montados en paralelo y supondremos que toda la masa del modelo está condensada en un punto; además este modelo estará sometido a una fuerza de excitación dependiente del tiempo.
Fig. 2.4: Modelo dinámico unidimensional de Kelvin-Voigt.

Antecedentes
25
La expresión del movimiento oscilatorio forzado que se produce es la siguiente:
2
2
d x dxm c k x f tdt dt
(2.8)
donde:
m: masa del sólido
c: constante de amortiguación del amortiguador
k: constante elástica del muelle lineal
Supondremos que la fuerza aplicada tiene forma rectangular, de modo que desde el instante inicial se aplica la fuerza máxima y en el instante τ esta fuerza deja de actuar de forma instantánea (figura 2.5).
t(s)
f(t)
0
F
Fig. 2.5: Fuerza aplicada en función del tiempo en el modelo dinámico adoptado.
Por tanto, la aplicación de la fuerza tiene dos intervalos:
Desde tiempo t = 0 hasta t = la carga es constante y su valor es F.
Desde t = en adelante la carga es nula.
En primer lugar determinaremos la expresión de la fuerza en función del resto de los parámetros y en segundo lugar resolveremos la ecuación diferencial para obtener la posición de la masa en cualquier instante.

Capitulo 2
26
Para la determinación de este valor de la fuerza aplicada utilizaremos el teorema del impulso mecánico y lo aplicaremos a las condiciones de nuestro problema:
0
( )t
vt
m v f t dt F
(2.9)
Donde:
mv: Masa del objeto que impacta
v: Velocidad del impacto
f(t): Fuerza variable en función del tiempo
F: Fuerza máxima alcanzada
: Tiempo final de aplicación de la carga (duración del impacto)
Despejando F de esta última expresión obtenemos:
vm vF
(2.10)
Por tanto, la solución de la ecuación del movimiento para cualquier tiempo será la unión de las soluciones de las ecuaciones aplicables en cada uno de estos intervalos:
2
2
2
2
para el intervalo t 0,
0 para el intervalo t ,
d x dxm c k x Fdt dtd x dxm c k xdt dt
(2.11)
Estas ecuaciones diferenciales con coeficientes constantes se resuelven como combinación de la solución de la ecuación homogénea y una solución particular de la completa. En el caso del segundo intervalo la ecuación es la ecuación homogénea del primer intervalo, por lo que su solución será parte de la solución obtenida para la primera ecuación.

Antecedentes
27
Solución de la ecuación homogénea:
2
2 0d x dxm c k xdt dt
(2.12)
Dividiendo toda la expresión por la masa podemos escribir la ecuación:
2
2 0d x c dx k xdt m dt m
(2.13)
Si además definimos:
Frecuencia angular del sistema: 0kwm
Coeficiente de amortiguación crítica: 02 2crC k m m w
Razón de amortiguamiento: cr
cC
Podemos decir que:
20
k wm (2.14)
Además, de la definición de la razón de amortiguamiento:
02crc C m w , con lo que:
02c wm
(2.15)
Y podemos expresar la ecuación diferencial como:
2
20 02 2 0d x dxw w x
dt dt (2.16)
La solución de esta ecuación diferencial tiene la forma:
00 0( ) cosw tx t A e w t (2.17)
Expresión en la que A y 0 son coeficientes que dependen de las
condiciones de contorno que se aplicarán más adelante.

Capitulo 2
28
Solución particular de la ecuación completa:
2
2
d x dxm c k x Fdt dt
(2.18)
Una solución particular de esta ecuación se puede expresar de la forma:
2 20m D c D m w x F (2.19)
Donde D es un operador derivada respecto al tiempo.
La solución se obtiene simplemente despejando la incógnita x, dividiendo la expresión resultante y operando con D:
2 2 2 2 4 20 0 0 0
1 1 c Fx t F D Fm D c D m w m w m w m w
(2.20)
Con ello la expresión del movimiento en el primer intervalo de tiempo se puede escribir como una combinación de las dos soluciones obtenidas:
01 0 0 2
0
( ) cosw t Fx t A e w tm w
(2.21)
Donde los coeficientes a determinar son A y 0 y se obtienen a partir de
las condiciones iniciales, que son las siguientes:
00
0x
tx
Sustituyendo en la solución la primera condición de contorno obtenemos el valor de A:
0 20
0 cos FAm w
20
20 0 0cos cos
Fm w FA
m w
(2.22)

Antecedentes
29
Derivando la expresión de la solución respecto al tiempo obtenemos:
0
0
0 0 0
0 0 0
cos
sen w
w t
w t
x t A w e w t
A e w t
(2.23)
Sustituyendo la segunda condición de contorno en esta expresión obtenemos el valor de 0 :
0 0 0 00 cos senA w A w
0 0 0cos +sen 0A w
0 0cos +sen 0
0tan
0 arctan (2.24)
Con este resultado podemos dar ya la expresión de la posición de la masa para el intervalo de tiempo t 0, :
01 0 22
00
( ) cos arctancos arctan
w tF Fx t e w tm wm w
(2.25)
Para el segundo intervalo de tiempo t , la solución será
simplemente la hallada ya para la ecuación homogénea pero con otras condiciones de contorno, que vienen impuestas por la solución de la ecuación para el primer intervalo particularizada para el punto t= :
02 0 0( ) cosw tx t B e w t (2.26)
2 1
2 1
x xt
x x

Capitulo 2
30
Aplicando la primera condición de contorno obtenemos el valor de B en función de 0 :
0
0
0 2200
0 0
cos arctancos arctan
cos
w
w
F Fe wm wm w
B e w
(2.27)
0
0
0 2200
0 0
cos arctancos arctan
cos
w
w
F Fe wm wm w
Be w
(2.28)
Para obtener 0 aplicamos la segunda condición de contorno:
0
0
0 0
0 020
0 020
0 0 0 0 0 0
cos arctancos arctan
sen arctancos arctan
cos sen
w
w
w w
F w e wm w
F e w wm w
B w e w B e w w
(2.29)
Sustituyendo el valor de B obtenido anteriormente obtenemos 0 en
función de los datos de nuestro problema; la expresión del valor de 0 resulta:
0
0
2 2 2 20 0 0
0 0 2 2 2 20 0 0
1 sen arctan 1arctan
1 cos arctan 1
w
w
e w w ww
e w w w
(2.30)
La solución analítica de esta expresión, junto con todos los cálculos y gráficos que se presentan en este apartado se ha obtenido con ayuda del programa Mathemática 5.0.
Finalmente se ha particularizado esta solución para un pilar de hormigón armado con una sección de 40x60 cm y una altura de 2.75 m, contra

Antecedentes
31
el que impacta un vehículo de 3000 kg a 20 km/h; con ello, los valores de los parámetros utilizados en el desarrollo analítico anterior son los siguientes:
mv = 3000 kg Masa del objeto que impacta
v = 5.55 m/s Velocidad del impacto
= 0.01 s Tiempo final de aplicación de la carga (duración del impacto)
63000 5.55 1.65 100.01
vm vF N
Valor de la fuerza aplicada
0 120.43 2 756.68 /w Hz rad s Frecuencia circular natural
del pilar
2.75 0.4 0.6 2500 1650 m kg Masa del pilar de hormigón
= 0.05 Razón de amortiguamiento del pilar
Con estos parámetros y la ayuda del programa Matemática 5.0 se han obtenido los valores de los coeficientes necesarios para definir las ecuaciones que rigen el movimiento:
A = -0.00176 m B = 0.00267
0 = -0.04995 0 = -8.30066
Con lo que la expresión final del movimiento en función del tiempo resulta:
37.8341 0.00176 cos(756.68 0.0499) 0.00175tx t e t
Para el intervalo t 0,0.01

Capitulo 2
32
37.8342 0.00267 cos 756.68 8.3006tx t e t
Para el intervalo t 0.01,
Si representamos cada una de estas expresiones, en primer lugar de forma individual y sin tener en cuenta los intervalos de validez, obtenemos las curvas que se muestran en la figura 2.6:
0.02 0.04 0.06 0.08 0.1
-0.004
-0.002
0
0.002
0.004
Fig. 2.6: Desplazamiento en función del tiempo para carga constante (línea roja) y para vibración libre (línea verde).
La curva de color rojo representa el movimiento en el primer tramo t 0,0.01 para el que la ecuación válida es 1( )x t . Si la aplicación de la
carga fuera constante durante todo el tiempo el movimiento del punto sería el que muestra esta línea; es decir, un movimiento oscilatorio amortiguado alrededor de un desplazamiento dado provocado por la carga aplicada.
La curva de color verde muestra el movimiento en el segundo tramo t 0.01, en el que la ecuación del movimiento es 2 ( )x t ; se trata en este
Desplazamiento (m)
Tiempo (s)
X1(t) X2(t)

Antecedentes
33
caso de un movimiento oscilatorio amortiguado libre, por lo que el movimiento se realiza alrededor del desplazamiento nulo.
La curva de movimiento en el intervalo total será una combinación de ambas, en la que será válida la curva roja desde el instante inicial hasta el tiempo 0.01 en que se cruza de forma tangente con la curva verde y comienza a ser válida esta curva hasta el tiempo final. La imagen de estas curvas unidas en sus intervalos válidos es la que se muestra en la figura 2.7:
0.02 0.04 0.06 0.08 0.1
-0.004
-0.002
0.002
0.004
Fig. 2.7: Desplazamiento en función del tiempo solución del problema planteado.
Por otra parte podemos hacer un estudio de la relevancia de la variación del amortiguamiento en el movimiento del punto. Para ello, variamos el valor de la razón de amortiguamiento y obtenemos los desplazamientos en función del tiempo que se muestran en la figura 2.8:
Desplazamiento (m)
Tiempo (s)

Capitulo 2
34
0.02 0.04 0.06 0.08 0.1
-0.004
-0.002
0
0.002
0.004
Fig. 2.8: Desplazamiento en función del tiempo con diferentes amortiguamientos.
Para = 0 no hay amortiguamiento, por lo que el movimiento mantiene la amplitud a lo largo del tiempo. Al aumentar el valor de disminuye la amplitud, por lo que para evitar daños en las estructuras es conveniente diseñarlas con valores altos del amortiguamiento.
Por otro lado la frecuencia del sistema amortiguado viene dada por:
2
2Dk cwm m
(2.31)
Mientras que la frecuencia del sistema sin amortiguar es:
0kwm
(2.32)
Además sabemos que: 2crC k m ; operando con estas expresiones
llegamos a:
Tiempo (s)
Desplazamiento (m) = 0 = 0,05 = 0,15

Antecedentes
35
22 221 1 1 1
2 4Dcr
m c c cw w w wk m km C
(2.33)
Teniendo en cuenta que los valores de c para las estructuras suelen estar entre el 2% y el 20% del valor de crC [Bachmann, 1997], resulta que el
valor máximo de es de 0.2, con lo que el valor mínimo de la frecuencia del sistema con amortiguamiento respecto a la frecuencia sin amortiguar es:
00.98Dw w , por lo que habitualmente se utiliza 0w en lugar de Dw .
Para un impacto en el que no se supere el régimen elástico se pueden determinar los efectos de la carga dinámica mediante el coeficiente de amplificación dinámica, que se define como el cociente entre el máximo desplazamiento dinámico y el máximo desplazamiento estático.
En el modelo de Kelvin-Voigt que estamos estudiando, al aplicar una carga estática F, el desplazamiento estático final experimentado es:
,maxestFxk
(2.34)
Para la carga dinámica aplicada, el máximo desplazamiento se obtiene en el primer tramo, cuya expresión ya hemos obtenido anteriormente:
01 0 22
00
( ) cos arctancos arctan
w tF Fx t e w tm wm w
Para que el valor de 1x sea máximo en esta expresión es necesario que:
0 arctan 0w t (2.35) De donde:
max
0
arctanxt w
(2.36)

Capitulo 2
36
En esta solución ha añadido el término para tomar la solución correspondiente a la primera oscilación; sustituyendo este valor obtenido del tiempo en la expresión original:
arctan1,max 2
(arctan )2 220 00
(arctan )
20
cos arctan arctancos arctan
coscos arctan
1cos arctan
o
Fx em w
F F Fem w m wm w
F em w
(2.37)
Con lo que el factor de amplificación dinámica resulta, una vez incorporadas algunas de las expresiones desarrolladas anteriormente:
(arctan )
2 (arctan )0
1cos arctan
. . . 1cos arctan
F em w eD A F F
k
(2.38)
arctan2. . . 1 1D A F e (2.39)
Si variamos el valor de la razón de amortiguamiento obtenemos distintos valores del factor de amplificación dinámica (tabla 1.2):
Tabla 1.2: Valores del factor de amplificación dinámica en función de la razón de amortiguamiento
Razón de amortiguamiento Desplazamiento estático (m)
Desplazamiento dinámico (m)
D.A.F
= 0 0.00176239 0.0035248 2 = 0.05 0.00176239 0.0032667 1.85 = 0.1 0.00176239 0.0030489 1.73
= 0.15 0.00176239 0.0028503 1.62

Antecedentes
37
Por tanto se comprueba que, con una carga F aplicada instantáneamente (sin energía cinética asociada) y con un amortiguamiento nulo el factor de impacto es igual a 2, y decrece con el aumento del amortiguamiento.
Para una fuerza excitadora armónica con una frecuencia de valor se puede representar el valor de la amplificación dinámica en función de la relación existente entre las frecuencias excitadora y natural de la estructura y la influencia de la razón de amortiguamiento (figura 2.9).
Fig. 2.9: Amplificación dinámica (D.A.F.) en función de la relación de frecuencias ( ) y la razón de amortiguamiento .
Donde: ,max. . . din
est
XD A F
X
0w
En la figura 2.9, típica en la bibliografía relacionada con acciones dinámicas, se ha representado el factor de amplificación dinámica D.A.F. en ordenadas frente a la relación entre las frecuencias excitadora y natural de la estructura , para distintos valores de la razón de amortiguamiento. El
D.A.F.

Capitulo 2
38
resultado es que para razones de amortiguamiento relativamente pequeños la resonancia se produce para valores de muy próximos a 0w , mientras que
para amortiguamientos altos el efecto de la resonancia queda muy reducido.
En nuestro caso no existe una frecuencia de la carga de excitación, tal como la hemos definido, por lo que no se puede definir el valor de ni, por supuesto un rango de valores de y, por tanto, al variar obtenemos únicamente valores singulares en lugar de curvas como en el caso típico de estudio en acciones armónicas. Idealmente la excitación de nuestro estudio se puede representar con una excitación tipo impulsional (función delta), lo que significa que la excitación contiene todas las frecuencias posibles y sólo las que coinciden con las propias de la estructura se transmiten a ésta.
No obstante, en nuestro caso, podemos dibujar la variación del factor de amplificación dinámica en función de la razón de amortiguamiento. Aunque el valor de debe ser necesariamente inferior a 1 para que el sistema sea subamortiguado (el único para el que se producen vibraciones), se ha representado la gráfica para valores mayores con el fin de ver la tendencia asintótica que muestra la curva para estos valores (figura 2.10).
0.2 0.4 0.6 0.8 1 1.2 1.4
0.25
0.5
0.75
1
1.25
1.5
1.75
2
Fig. 2.10: Variación del factor de amplificación dinámica en función de la razón de amortiguamiento.
D.A.F.

Antecedentes
39
Para un valor muy grande de , realmente a partir de 1 (valor del amortiguamiento crítico), no existe amplificación dinámica, ya que la curva tiende asintóticamente a un valor de amplificación igual a 1. Además, no pueden darse valores superiores a 2 para el D.A.F., ya que son necesarios valores de < 0, y ello implica una amplificación del movimiento en lugar de amortiguación, lo que no tiene sentido en nuestro problema.
En este apartado se han dado unas pinceladas de los procedimientos simplificados que habitualmente se plantean para la resolución de un problema dinámico. Para una mejor aproximación al problema sería necesario resolver el problema elástico. Para ello se plantean las relaciones entre fuerzas y desplazamientos externos y fuerzas y desplazamientos internos. En general, estas relaciones se expresan mediante ecuaciones diferenciales con condiciones de contorno. Estas ecuaciones diferenciales dependen del punto del dominio de estudio y frecuentemente son no lineales, lo que complica notablemente su resolución. La forma de acometer estos problemas es a través de una discretización espacial por medio del método de los elementos finitos y una integración numérica de las ecuaciones resultantes en cada uno de los puntos.
2.3. DISCRETIZACIÓN ESPACIAL: EL MÉTODO DE LOS ELEMENTOS
FINITOS
El método de los elementos finitos se utiliza habitualmente en la resolución de problemas de valores de contorno en ingeniería. Estos son problemas en los que una o más variables dependientes deben satisfacer una ecuación diferencial en cualquier punto de un dominio establecido y a su vez satisfacer unas condiciones específicas en el contorno del dominio. Las variables a obtener en un problema mecánico son los campos de movimientos,

Capitulo 2
40
tensiones y deformaciones. Las dependencias entre estas variables para un problema estático se resumen en la figura 2.11:
Fig. 2.11: Ecuaciones que relacionan las variables de un problema mecánico estático
En el caso de un problema dinámico, como el estudiado en este trabajo, todas las magnitudes mostradas en la figura 2.11 y sus relaciones dependen del tiempo. No obstante, el desarrollo del método que se da en este apartado se corresponde con el caso estático, con el fin de simplificar las expresiones. Algunas particularidades para el caso de un análisis dinámico se dan al final de este apartado.
Una descripción detallada del método se puede encontrar en los textos de Zienkiewicz [Zienkiewicz, 1991] o Bathe [Bathe, 1996], entre otros autores. En esta memoria únicamente se pretende dar una visión general y resumida sobre este método.
En general, el método de los elementos finitos se basa en transformar un cuerpo de naturaleza continua en un modelo discreto aproximado, esta transformación se denomina discretización espacial del modelo. El conocimiento de lo que sucede en el interior de este modelo del cuerpo aproximado, se obtiene mediante la interpolación de los valores conocidos en los nodos. Es, por tanto, una aproximación de los valores de una función a

Antecedentes
41
partir del conocimiento de su valor aproximado en un número determinado y finito de puntos, de tal forma que:
El continuo se divide en un número finito de partes, llamados elementos, cuyo comportamiento se especifica mediante un número finito de parámetros asociados a ciertos puntos característicos llamados nodos. Estos nodos son los puntos de unión de cada elemento con sus adyacentes.
La solución del sistema completo sigue las reglas de los problemas discretos. El sistema complejo se forma por ensamblaje de los elementos.
Las incógnitas del problema dejan de ser funciones matemáticas y pasan a ser el valor aproximado de estas funciones en los nodos.
El comportamiento en el interior de cada elemento queda definido a partir del comportamiento de los nodos mediante las adecuadas funciones de interpolación o funciones de forma.
Las funciones de interpolación proporcionan el valor del desplazamiento en cualquier punto del elemento en función de los desplazamientos en los nodos; además se eligen de forma que cumplen, para un elemento con tres grados de libertad (figura 2.12):
( , , ) 1( , , ) 0 ( )
i i i i
i j j j
N x y zN x y z i j
(2.40)
Donde iN es la función de interpolación correspondiente al nodo i y x,y,z
son las tres coordenadas de cada nodo del elemento.

Capitulo 2
42
Fig. 2.12: Valor de la función de interpolación descrita en la ecuación (2.40), y particularizada para un dominio bidimensional sobre un elemento triangular
Es decir, la función de interpolación Ni determina los desplazamientos de los puntos del elemento cuando se le da un valor unidad al desplazamiento del nodo i manteniendo nulo el desplazamiento de los otros nodos.
Los desplazamientos se pueden escribir en función de los movimientos de los nodos a través de las funciones de interpolación, de forma que, para un elemento con tres nodos y tres grados de libertad en cada uno de ellos correspondientes a los desplazamientos en tres direcciones perpendiculares entre sí, tendremos:
1 1 2 2 3 3
1 1 2 2 3 3
1 1 2 2 3 3
( , , ) ( , , ) ( , , )( , , ) ( , , ) ( , , )( , , ) ( , , ) ( , , )
e
u N x y z u N x y z u N x y z uu v N x y z v N x y z v N x y z v
w N x y z w N x y z w N x y z w
(2.41)
Donde eu
es el campo de movimientos y iu , iv y iw son los
desplazamientos en cada una de las direcciones correspondientes a los tres grados de libertad en el nodo i del elemento. La ecuación (2.41) se puede expresar también en la forma:

Antecedentes
43
1
1
1
1 2 3 2
1 2 3 2
1 2 3 2
3
3
3
0 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
e
uvw
u N N N uu v N N N v
w N N N wuvw
→ e e eu N
(2.42)
Donde eN es la matriz de las funciones aproximantes o de forma 1 2 3N N N
eu
es el vector de desplazamientos del elemento uvw
e
es el vector de parámetros nodales del elemento =
1 1 1 2 2 2 3 3 3 u v w u v w u v w
Conocidos los desplazamientos de todos los puntos del elemento se pueden determinar las deformaciones en cualquier punto aplicando las ecuaciones de compatibilidad:

Capitulo 2
44
0
0
x
y
z
xy
xz
yz
ux xvy yw uz z vu v
wy x y xu wz x z yv wz y z x
euL
→ eu L
(2.43)
Donde L es la matriz con los operadores simbólicos que al operar sobre
eu
facilitan la deformación.
Sustituyendo la expresión (2.42) en (2.43) obtenemos:
e e e eu L L N B
(2.44)
Por otra parte, las tensiones se definen a partir de la ley de comportamiento en función de las deformaciones en la forma:
D
(2.45)
Donde D es la matriz de propiedades mecánicas o matriz constitutiva.
Sustituyendo la expresión (2.44) en (2.45) obtenemos:
e D D B
(2.46)

Antecedentes
45
Además, las fuerzas externas a que se encuentra sometido un elemento
en equilibrio, organizadas en el vector de fuerzas externas eF
, originan en
cada punto del elemento un estado de esfuerzos definido por el vector de
esfuerzos
y relacionadas con las ecuaciones de equilibrio. Estas fuerzas externas se pueden agrupar en función del dominio sobre el que se aplican:
eP
: Fuerzas aplicadas en los nodos
eq
: Fuerzas distribuidas en el volumen del elemento eV
ep
: Fuerzas distribuidas en su superficie eS
En el planteamiento débil del problema elástico, con el que obtenemos el método de elementos finitos, imponemos un desplazamiento nodal virtual
infinitesimal a este elemento en equilibrio, al que llamaremos *e
, y como
consecuencia se producirán unos desplazamientos virtuales en los puntos del
elemento, que llamaremos *eu
, que a su vez provocarán en cada punto un
estado de deformaciones virtuales definido por el vector de deformaciones *
.
La aplicación del teorema de los trabajos virtuales implica que debe ser
nula la suma del trabajo eW que realizan las fuerzas externas eF
durante los
desplazamientos virtuales *e
y *eu
y del trabajo iW que realizan las fuerzas
internas, debidas a los esfuerzos
durante las deformaciones virtuales *
.
El trabajo realizado por las fuerzas externas se puede escribir en función del tipo de fuerza de que se trate:
* * *
e e
T T T
e e e e e e e e eV S
W P u q dV u p dS
(2.47)

Capitulo 2
46
De la expresión (2.42) teníamos: e e eu N
; si trasponemos la matriz y
los vectores la relación queda: T T T
e e eu N
, con lo que la expresión del
trabajo realizado por las fuerzas externas resulta:
* * *
* * *
e e
e e
T T TT T
e e e e e e e e e e eV S
T T TT T
e e e e e e e e e eV S
W P q dV p dS
P q dV p dS
N N
N N
(2.48)
Ya que *T
e
no varía en el volumen ni en la superficie del elemento.
Por otra parte, el trabajo realizado por las fuerzas internas debido a los
esfuerzos
durante las deformaciones virtuales *
es:
*
e
T
i eV
W dV
(2.49)
De la ecuación (2.44) teníamos: e B
; si trasponemos la matriz y los
vectores la relación queda: T T T
e B
; introduciendo este resultado en la
expresión del trabajo realizado por las fuerzas internas, junto con el hallado en la ecuación (2.47), resulta:
* *
e e
T TT T
i e e e e e eV V
W dV dV
B DB B DB
(2.50)
Aplicando el teorema de los trabajos virtuales podemos igualar los resultados obtenidos para el trabajo realizado por las fuerzas externas y por las internas:

Antecedentes
47
* * * *
e e e
T T T TT T T
e e e e e e e e e e e eV S V
P q dV p dS dV
N N B DB
(2.51)
El cumplimiento de esta expresión para cualquier desplazamiento
virtual *T
e
obliga a que se cumpla la relación:
e e e
T T Te e e e e e e e e
V S V
P q dV p dS dV
N N B DB
(2.52)
Ecuación en la que se ha simplificado el factor común *T
e
de todos los
sumandos. Esta expresión representa la ecuación matricial de equilibrio del elemento y se puede escribir en la forma simplificada:
e e eF k
(2.53)
Donde:
ek : matriz de rigidez del elemento = e
Te
V
dVB DB
eF
: Vector de fuerzas nodales del elemento =e e eP q pF F F
, con:
e
ePF P
: Vector de fuerzas aplicadas en los nodos
e
e
Tq e e e
V
F q dV N
: Vector de fuerzas nodales equivalentes a las
fuerzas distribuidas en el volumen del elemento
e
e
Tp e e e
S
F p dS N
: Vector de fuerzas nodales equivalentes a las
fuerzas distribuidas en la superficie del elemento

Capitulo 2
48
Para obtener la respuesta de la estructura hay que tener en cuenta, en primer lugar, las condiciones de contorno de la estructura, que imponen unos desplazamientos establecidos en algunos nodos. Estos desplazamientos impuestos reducen los grados de libertad de la estructura e impiden su movimiento. Al tener en cuenta estos enlaces externos la matriz de rigidez de la estructura reduce su orden al número de grados de libertad activos de la estructura; es decir, al número de parámetros que definen la configuración de la estructura.
Para obtener esta matriz de la estructura reducida generalmente se desglosan tanto las fuerzas nodales como los desplazamientos nodales en fuerzas nodales conocidas y desconocidas, con la necesaria reordenación de los elementos de la matriz de rigidez; tras esta transformación la ecuación (2.53) se puede escribir en la forma:
d cI
c dII III
FK KFK K
(2.54)
De la que obtenemos la siguiente relación tomando la primera de las ecuaciones:
d I c cK K F
(2.55)
En las estructuras es habitual que los desplazamientos nodales conocidos sean nulos, ya que corresponden a los nodos de los enlaces externos, por lo que la relación anterior resulta finalmente:
d cK F
(2.56)
Donde K es la matriz de rigidez reducida de la estructura.
A partir de aquí podemos obtener los desplazamientos nodales simplemente hay que invertir la matriz K y multiplicar por el vector de fuerzas nodales conocidas.

Antecedentes
49
1d cK F
(2.57)
Para la obtención de las reacciones utilizamos la segunda ecuación implícita en (2.54) y eliminamos el término de desplazamientos conocidos, tal como hemos hecho con la primera ecuación:
II d dK F
(2.58)
Y sustituimos los valores ya determinados de los desplazamientos nodales desconocidos:
1II c dK K F F
(2.59)
En cuanto a las tensiones y deformaciones en cualquier punto de la estructura se obtienen utilizando las expresiones (2.44) y (2.46) ya descritas en este apartado:
e e e eu L L N B
e D D B
En el caso de problemas dinámicos, el vector de fuerzas externas incluye los términos correspondientes a las fuerzas de inercia y viscosas, en caso de que existan, de forma que en la ecuación (2.53) tendremos:
eF
: Vector de fuerzas nodales del elemento =e e eP q pF F F F F
, con:
eePF P
: Vector de fuerzas aplicadas en los nodos
e
e
Tq e e e
V
F q dV N
: Vector de fuerzas nodales equivalentes a las fuerzas
distribuidas en el volumen del elemento
e
e
Tp e e e
S
F p dS N
: Vector de fuerzas nodales equivalentes a las fuerzas
distribuidas en la superficie del elemento

Capitulo 2
50
2
2e
Tp e e e
V
dF N N dV udt
: Vector de fuerzas nodales equivalentes a las
fuerzas de inercia asociadas a la masa del elemento, con ρ: densidad del material
e
Te e e
V
dF N N dV udt
: Vector de fuerzas nodales equivalentes a las
fuerzas viscosas asociadas al volumen del elemento, con µ: viscosidad del material
Tras desarrollar los términos de la ecuación (2.53) y ensamblar el
sistema se obtiene la ecuación diferencial matricial siguiente:
M u C u K u F t (2.60)
Donde:
M Matriz de masa
C Matriz de amortiguamiento
K Matriz de rigidez
u Vector de aceleraciones nodales
u Vector de velocidades nodales
u Vector de desplazamientos nodales
( )F t Vector de cargas dependientes del tiempo
En la ecuación (2.60) se obtienen todas las matrices ensamblando las submatrices elementales para cada elemento, con el mismo procedimiento que en el caso estático. La integración de este sistema de ecuaciones diferenciales se puede acometer con diferentes técnicas, todas ellas numéricas, dada la

Antecedentes
51
complejidad que presentan, especialmente en el caso de que las ecuaciones de gobierno (2.45) sean no lineales. En el apartado siguiente se da una breve descripción de los tipos de integración más comunes en los programas comerciales para cálculo por elementos finitos y que, además, han sido utilizados en este trabajo.
2.4. INTEGRACIÓN TEMPORAL NUMÉRICA
En principio, todos los sucesos en mecánica estructural se pueden considerar como dinámicos. Tal como se ha visto en el apartado anterior, para un problema de mecánica estructural discretizado en un número finito de puntos o nodos para su resolución a través del método de los elementos finitos, la ecuación del movimiento a resolver es:
M u C u K u F t
Cuando los efectos de la inercia o del amortiguamiento no tienen importancia y el comportamiento estructural permanece dentro del régimen lineal se utiliza una aproximación estática, a través de la cual la ecuación del movimiento resulta:
K u F t (2.61)
No obstante, en el régimen no lineal la situación es muy diferente. A pesar de que este método ha demostrado ser eficaz en el análisis estático de estructuras ligeramente no lineales, el cálculo de cargas de rotura en problemas con materiales no lineales, cargas de pandeo o los problemas de contacto presentan frecuentemente una convergencia muy mala. En estos casos, el tratamiento del problema como transitorio (también llamado “quasi-estático”) resuelve muchos problemas algorítmicos y numéricos.

Capitulo 2
52
Dentro de los procedimientos de integración de la ecuación del movimiento se encuentran los métodos implícitos y los explícitos. Los términos explícito e implícito se refieren al esquema utilizado en el cálculo numérico empleado en la resolución de las ecuaciones; en un esquema explícito, una variable en el instante t puede escribirse en función de los valores de esa variable en los instantes anteriores, mientras que en un esquema implícito la expresión de la variable para el tiempo t incluye el valor de esa misma variable para el tiempo t además de los valores para tiempos anteriores. Es decir, en un esquema explícito, una vez conocidos los valores en el tiempo anterior, el cálculo del valor para el tiempo actual es inmediato, mientras que en un esquema implícito este cálculo no es directo, ya que la expresión que proporciona el resultado buscado contiene ese mismo valor. A continuación se describen cada uno de estos métodos, con los esquemas de integración utilizados habitualmente y sus ventajas e inconvenientes.
CÁLCULO IMPLÍCITO
La resolución de problema transitorio se puede realizar a partir de una integración numérica del tipo Newmark, con la que la interpolación en tiempo para el paso n, en función de los parámetros de integración y es [Huebner, 1982]:
1 1 1 1n n n nM u C u K u F (2.62)
2
1 112n n n n ntu u t u u u
(2.63)
1 11n n n nu u t u u (2.64)
Utilizando la expresión (2.63) podemos escribir 1nu en función de 1nu y de
valores para el paso n anterior (conocido). Sustituyendo este resultado en la expresión (2.64) obtenemos 1nu en función de 1nu y de valores para el paso n.

Antecedentes
53
Utilizando estos dos resultados en la expresión (2.62) y agrupando términos obtenemos la ecuación:
1 12
2
2 2 2 2 1 1
2 2 1 1
n n n n n
n n n
K C M u F C u u t ut t t
M u u ut t
(2.65)
Que se puede escribir de forma resumida como:
1 1n nK u F (2.66)
Donde se ha utilizado:
2
2 2K K C Mt t
(2.67)
1 1
2
2 2 1 1
2 2 1 1
n n n n n
n n n
F F C u u t ut
M u u ut t
(2.68)
En estas expresiones K es la rigidez efectiva y depende de la matriz
de rigidez del sistema; por tanto, aunque las matrices de masa y amortiguamiento sean diagonales, la matriz de rigidez efectiva no lo será. En consecuencia es necesario resolver un sistema de ecuaciones simultáneas para cada tiempo de paso y estamos ante un método de integración implícito. Para resolver este tipo de ecuaciones es necesario invertir la matriz K para
obtener los desplazamientos. La inversión de esta matriz conlleva un coste

Capitulo 2
54
computacional muy elevado, sobre todo con la existencia de no linealidades que implican que K es función de los desplazamientos.
A partir de estas ecuaciones y variando los valores de y se obtienen distintos esquemas de integración. Con los parámetros 0.25 y
0.5 se obtiene el esquema estándar de Newmark. Este método se conoce como el de la aceleración constante. Para problemas lineales este algoritmo es incondicionalmente estable. Para otras elecciones de y se puede encontrar un estudio de la estabilidad en el libro de Zienkiewicz y Taylor [Zienkiewicz, 1991].
Para el esquema estándar de Newmark la elección del tamaño del tiempo de paso es independiente de la estabilidad y sólo depende de la precisión de la solución. Una norma general es que el tiempo de paso debe ser lo suficientemente pequeño como para que la solución obtenida para todos los modos que contribuyen significativamente en la respuesta total sea suficientemente aproximada. Generalmente el tiempo de paso necesario para Newmark puede ser más grande que el necesario para el método de diferencias centrales, que se describe más adelante.
En general el método implícito es preferido para el análisis de problemas estáticos o quasi-estáticos. Esto se debe a la alta eficiencia de este método para problemas de larga duración con baja velocidad de carga, ya que el tiempo de paso puede ser más grande que en el método explícito sin poner en riesgo la estabilidad de la solución, con lo que se obtiene un ahorro en tiempo de cálculo frente al método explícito.

Antecedentes
55
CÁLCULO EXPLÍCITO
Se utiliza el método de Diferencias Centrales para aproximar los valores de u y u [Hallquist, 1993], de forma que, despreciando los términos de
segundo orden resulta:
1 1
2n n
nu uu
t
(2.69)
1 12
2n n nn
u u uut
(2.70)
Sustituyendo las ecuaciones (2.69) y (2.70) en la ecuación (2.62) para el paso n y resolviendo para 1nu se obtiene el esquema de recurrencia:
1 12 2 2 2
1 1 2 1 12 n n n nM C u F K M u M C u
t t t t t (2.71)
Que se puede escribir de forma resumida como:
1 1n nK u F (2.72)
Donde se ha utilizado:
2
1 12
K M Ct t
(2.73)
1 12 2 2
2 1 1n n n nF F K M u M C u
t t t
(2.74)
Si la matrices de masa M y de amortiguamiento C se diagonalizan, por ejemplo para masas puntuales en los elementos, entonces el esquema de integración se denomina explícito y su solución es muy simple y eficiente. Las

Capitulo 2
56
ecuaciones están desacopladas y no es necesario realizar la factorización de ninguna matriz. La carga de cálculo es significativamente menor que con el esquema implícito. No es necesaria ninguna iteración y el algoritmo se convierte en un esquema automático incluso para los casos no lineales. El problema es que la estabilidad está condicionada, ya que el tiempo de paso debe ser elegido de forma que se siga la condición de Courant-Friedrichs-Levy. Esto significa que el tiempo de paso debe ser inferior a un tiempo crítico definido como:
2n
crTt t (2.75)
donde nT es el menor periodo natural de vibración del sistema formado
por n elementos. El periodo nT se corresponde con la frecuencia natural más
alta nw , ya que 2n nT w .
RELAJACIÓN DINÁMICA
La idea de analizar problemas estáticos no lineales como transitorios, utilizando esquemas explícitos para su resolución es conocido con el nombre de Relajación dinámica [Underwood, 1983; Park, 1982]. En este método la estructura se carga y la vibración se amortigua hasta el equilibrio estático. En ese momento la velocidad y la energía cinética correspondiente son inferiores a un umbral preestablecido, generalmente bastante bajo. Este método funciona bastante bien si los parámetros del amortiguamiento de Rayleigh con matrices de masa y amortiguamiento diagonales se escogen de acuerdo con las frecuencias de excitación. Si el rango de frecuencias excitadora es bastante pequeño, entonces se llega a la solución en pocos pasos. En general, esta situación no se da y es necesario un ajuste más sofisticado de los parámetros del amortiguamiento, tal como sugiere Papadrakakis [Papadrakakis, 1981]. Además, la densidad del elemento se puede ajustar a

Antecedentes
57
través del escalado de masa con lo que la amplitud de la frecuencia puede disminuir mejorando el efecto de la amortiguación.
La experiencia en la aplicación de los algoritmos de relajación dinámica a problemas a escala real muestra que son necesarios un número bastante grande de pasos y ajustes para conseguir la convergencia [Schweizerhof, 1999].
2.5. CARACTERÍSTICAS PARTICULARES DEL HORMIGÓN ARMADO
La modelización de los efectos de las cargas dinámicas sobre el hormigón armado es un tema recurrente en la investigación actual sobre este material. El comportamiento del hormigón armado tiene características particulares, tanto para cargas estáticas como para dinámicas, que es necesario reflejar en su modelización. Las caraterísticas que afectan de manera más representativa a la modelización del hormigón y a su comportamiento bajo cargas dinámicas son las que se describen a continuación.
Influencia del estado de tensiones tridimensional
La resistencia del hormigón depende tanto de la componente hidrostática como de la desviadora del tensor de tensiones. Se puede encontrar una descripción y discusión de la superficie tridimensional de plastificación en [Chen, 1988]. Los ensayos utilizados para el estudio del hormigón son el triaxial a compresión y el triaxial a tracción. Estos ensayos se realizan sobre probetas cilíndricas de hormigón. En ambos casos se somete a la probeta a una presión hidrostática y, manteniendo esta presión constante, se incrementa la tensión en el eje vertical en el primer caso y se disminuye en el segundo. Algunos resultados experimentales se pueden encontrar en los

Capitulo 2
58
trabajos de Mills y Zimmerman [Mills, 1970] (figura 2.13 (dcha.)). Estos datos, representados en el plano meridiano, muestran que el hormigón falla en valores inferiores del segundo invariante del tensor desviador de tensiones para tracción que para compresión. El ajuste de datos experimentales como estos en el plano desviador se puede encontrar en el trabajo de Launay y Gachon [Launay, 1972] (figura 2.13 (izqda.)).
Fig. 2.13: Ejemplo de datos experimentales representados en el plano meridiano encontrados por Mills y Zimmermann [Mills, 1970] (dcha.) y ejemplo de ajuste de datos experimentales en
el plano desviador realizado por Launay y Gachon [Launay, 1972] (izqda.)
Si se representan las curvas completas en el plano desviador de tensiones (figura 2.14) se observa que para compresiones las líneas forman un triángulo para bajas presiones de confinamiento, que se convierte en un círculo para presiones de confinamiento muy altas. Esto significa que la resistencia del hormigón depende del tercer invariante del tensor desviador de tensiones.
Una de las consecuencias de estos datos es el estudio del efecto del confinamiento del hormigón, ya que proporciona un aumento de la resistencia a rotura del material considerable. Este efecto se ha estudiado en numerosos trabajos relacionados con el comportamiento de pilares de hormigón confinados en tubo de acero [Hu, 2004; Cocco, 2002]. Este tipo de estructuras

Antecedentes
59
se utilizan en diseños antisísmicos de edificios y en defensas contra impacto de embarcaciones.
Fig. 2.14: Ejemplo de la representación gráfica de las superficies de fallo en el plano desviador
para el modelo material 159 en LS-DYNA [Material Model 159, 2007]
Pérdida de resistencia para deformaciones mayores que la correspondiente al
pico de resistencia
El hormigón pierde completamente la resistencia en bajas tensiones de confinamiento (figura 2.15) para deformaciones situadas más allá del punto en el que se alcanza la máxima resistencia del hormigón. A partir de este punto la resistencia cae rápidamente y tiende a 0. Esta rama descendente completa el diagrama parábola-rectángulo que se define en la EHE-08 [EHE-08, 2008] para deformaciones unitarias situadas más allá del 0.002. Incluso para presiones de confinamiento moderadas se puede encontrar esta pérdida de resistencia, aunque en estos casos mantiene una cierta resistencia residual (figura 2.16).

Capitulo 2
60
Fig. 2.15: Pérdida de resistencia del hormigón sometido a compresión simple para distintos
tipos de hormigón. [CEB, 1993]
Fig. 2.16: Pérdida de resistencia del hormigón con distintas presiones de confinamiento [Joy, 1993]
Por otra parte, al mismo tiempo que el hormigón pierde resistencia, también pierde rigidez. Esto se observa en los ensayos de carga y descarga en los que se comprueba que la pendiente de estas curvas disminuye con el aumento de la deformación (figura 2.17).

Antecedentes
61
Fig. 2.17: Pérdida de rigidez del hormigón en ciclos de carga y descarga [Reinhardt, 1984]
La modelización matemática de esta pérdida de resistencia y rigidez se hace a través de la formulación de daño. Generalmente se utiliza un factor de daño que multiplica a la tensión sin daño para obtener la tensión con daño [Simo, 1987].
Mejora de la resistencia a cortante debido a la compactación de los poros
El hormigón aumenta su resistencia sometido a compresión hidrostática debido a la compactación de sus poros. Este comportamiento se observa cuando se comparan las curvas de deformación volumétrica del hormigón sometido a compresión hidrostática frente a deformación uniaxial (figura 2.18). La presión necesaria para llevar a una determinada deformación volumétrica en probeta sometida a compresión hidrostática es mayor que la presión necesaria para llevarla a esa misma deformación volumétrica en tensión uniaxial.

Capitulo 2
62
Fig. 2.18: Comparación entre el comportamiento medido en compresión hidrostática frente a deformación uniaxial [Joy, 1993]
El efecto de la velocidad de deformación
El aumento de la velocidad de deformación incrementa la resistencia del hormigón. Esta característica del hormigón ha sido estudiada en numerosos trabajos de investigación experimentales [Bischoff, 1991; Bischoff, 1995; De Borst, 1990; Brace, 1971; Brara, 1999; Calvetti, 2003; Camborde, 2000; Cundall, 1989; Donzé, 2001; Donzé, 2002; Ehlers, 2001; Gary, 1998; Gopalaratnam, 1996; Koh, 2001; Cotsovos, 2005; Cotsovos, 2008-a; Cotsovos, 2008-b; Cotsovos, 2008-c]. En algunos de estos trabajos se hacen ensayos tanto a compresión como a tracción simples, desde velocidad de aplicación de la carga nula, es decir, estáticos, hasta velocidades de deformación de 10-1 s-1 por medio de una máquina de ensayos hidráulica [Bischoff, 1991]. El ensayo tipo Charpy se ha utilizado con frecuencia en estos estudios y se han encontrado resultados significativos para una velocidad de carga mayor de 1 s-1 [Gopalaratnam, 1996]. A través de máquinas de impacto por caída de masa [Bentur, 1986] se han alcanzado velocidades de deformación de 101 s-1; no obstante, en estas máquinas, la energía del impacto está limitada por el

Antecedentes
63
tamaño de la máquina. Se han llegado a lanzar masas de entre 50-100 kg desde una altura entre 2-6 m. Para conseguir mayores velocidades de deformación es necesario recurrir al ensayo tipo “Split Hopkinson Pressure Bar” [Hopkinson, 1914], con el que se puede conseguir una velocidad de deformación de 102 s-1. Para mayores velocidades de deformación es necesario recurrir al uso de explosivos.
La velocidad de deformación esperada se puede relacionar con el evento, tal como describe Bischoff [Bischoff, 1991] (figura 2.19).
Fig. 2.19: Velocidad de deformación para distintos tipos de sucesos [Bischoff, 1991]
El efecto de la velocidad de deformación se ha estudiado en diferentes características del hormigón. El módulo de Young, coeficiente de Poisson, capacidad de absorción de energía y deformación uniaxial última son valores dependientes de la velocidad de deformación, pero en mucha menor intensidad que las resistencias a tracción y compresión [Bischoff, 1995]. Los valores recopilados y ajustados a leyes lineales por Bischoff [Bischoff, 1991] y Malvar [Malvar, 1998-c] se muestran en las figuras 2.20 y 2.21 para compresión y tracción, respectivamente, en función de los valores de amplificación dinámica (DAF) en cada uno de los casos.
En estas figuras se puede observar claramente dos tramos en los que el comportamiento es diferente. En el primer tramo la dependencia del DAF con el logaritmo de la velocidad de deformación es lineal; en el segundo tramo la pendiente del ajuste se dispara. El límite entre los dos tipos de comportamiento se sitúa alrededor de 3x101 s-1 en compresión y 100 s-1 en tracción.

Capitulo 2
64
Fig. 2.20: Relación entre la velocidad de deformación y la resistencia a compresión [Bischoff, 1991]
Fig. 2.21: Relación entre la velocidad de deformación y la resistencia a tracción [Malvar, 1998]

Antecedentes
65
Muchos autores se han planteado cuál es el origen de esta característica del hormigón, y para ello han estudiado la influencia de diferentes parámetros como la relación agua/cemento [Bischoff, 1995; Gopalaratnam, 1996; Toutlemonde, 1995], condiciones de contorno [Bischoff, 1991] y presencia de agua libre [Rossi, 1994; Toutlemonde, 1995]. Como conclusión a partir de estos trabajos, parece que, en principio, la relación agua/cemento y las condiciones de contorno son parámetros secundarios ya que tienen poca influencia. Además, el DAF parece ser más sensible a la velocidad de deformación en tracción que en compresión. Por otra parte, parece claro que el efecto de la velocidad de deformación, al menos para velocidades de deformación inferiores a 101 s-1 se explica por la presencia de agua libre en el hormigón, a partir de un efecto similar al “efecto Stefan” [Rossi, 1994]. Para mayores velocidades de deformación el motivo es mucho menos claro; para tensión Hild et al. [Hild, 2003] han propuesto un nuevo punto de vista basado en técnicas probabilísticas y determinísticas y para compresión, Janach [Janach, 1976] propuso la hipótesis de que el efecto de pandeo combinado con la inercia es el responsable del efecto de la velocidad de carga del espécimen, convirtiéndolo en un efecto estructural. Esta característica permite la modelización del hormigón a partir de sus parámetros estáticos, lo que resulta muy conveniente; no obstante, se trata de un tema sobre el que todavía se está investigando.
La relación entre los efectos asociados a la velocidad de carga y los efectos estructurales de las probetas ha sido estudiada por Cotsovos y Pavlovic [Cotsovos, 2005; Cotsovos, 2008-a] sobre un espécimen prismático sometido a compresión. Estos autores concluyen que a través de las propiedades estáticas del hormigón se pueden obtener modelos que representen las características del material sometido a diferentes velocidades de deformación; no obstante, se observa que el comportamiento del espécimen resulta afectado en gran medida por la interacción entre el mecanismo de carga y el hormigón y por las condiciones de contorno, por lo que el estudio realizado describe el comportamiento estructural del espécimen más que el comportamiento del material del que está formado. Con ello se cuestiona el

Capitulo 2
66
uso de los datos experimentales obtenidos a lo largo de la historia (figs. 2.20 y 2.21) y utilizados por todos los investigadores en este campo para el desarrollo de modelos constitutivos para el hormigón sometido a cargas dinámicas. Estos datos experimentales sugieren, según estos autores, que el comportamiento de una pieza de hormigón sometida a carga dinámica depende de una serie de parámetros cuyo efecto no ha sido cuantificado todavía.
Por otra parte, y como continuación de este trabajo, estos autores han realizado un estudio paramétrico con el que se pretende investigar las causas de la dispersión en los datos experimentales realizados por diversos autores (figs. 2.20 y 2.21). Las conclusiones de este estudio, presentadas en [Cotsovos, 2008-b] indican que esta variación se debe a variaciones en la resistencia del hormigón, la sección y longitud del espécimen, la técnica de puesta en carga, las técnicas de medida e incluso la definición misma de velocidad de deformación. Según las conclusiones de estos autores, el experimento que tiene menor dispersión es el de Hopkinson [Hopkinson, 1914] y por tanto es con el que se obtienen mejores resultados en cuanto a la caracterización del material sin tener en cuenta la estructura de la que forma parte. El mismo estudio y conclusiones aplicados a tensiones de tracción se puede encontrar en [Cotsovos, 2008-c].
Georgin y Reynouard [Georgin, 2003] hacen una modelización numérica del ensayo de Hopkinson, con el fin de arrojar luz y evaluar el efecto de la velocidad de deformación. En este trabajo se concluye que existe una contribución importante tanto por parte de las fuerzas de inercia y las características estructurales del espécimen como de la velocidad de deformación en el incremento de resistencia del espécimen sometido a cargas dinámicas de compresión.
Otro punto de vista sobre los efectos de la velocidad de deformación se pueden encontrar en el trabajo realizado por Park et al. [Park, 2001]. En este trabajo se estudia el comportamiento del hormigón y del mortero de cemento sometidos a velocidades de deformación del orden de 104 s-1 y presiones

Antecedentes
67
hidrostáticas mayores de 1.5 GPa. El estudio se enfoca desde el punto de vista de la morfología de la microestructura del material y de las fases que lo forman. Para ello se utiliza un modelo basado en el de Drucker-Prager. Los resultados muestran la influencia del porcentaje de cada uno de los componentes del material en la energía absorbida por el hormigón durante el impacto. Un trabajo muy similar a éste pero con una velocidad de deformación situada entre 350 y 700 s-1 fue desarrollada por Hentz et al. [Hentz, 2004]. En este trabajo también se confirma la hipótesis de la influencia de la inercia en los ensayos realizados ya que se confirmó que el incremento de resistencia del hormigón procede de una transición desde un estado de deformación uniaxial hasta un estado de tensión uniaxial; esta transición se asocia con el pandeo, que es un efecto estructural.
2.6. MODELIZACIÓN DEL HORMIGÓN ARMADO
El comportamiento mecánico de los materiales se describe generalmente a través de una relación entre tensiones, deformaciones, velocidad de deformación e historia de carga [CEB, 1998]:
, , historia de cargaf
Las diferentes teorías existentes para la modelización del hormigón y su armado han evolucionado mucho en los últimos 50 años y todavía hoy constituyen una parte importante de la investigación en cuanto al comportamiento del hormigón armado. Se incluye a continuación una breve descripción de los modelos más importantes que históricamente se han utilizado, junto con la referencia al autor original o a un trabajo de especial relevancia en ese campo.

Capitulo 2
68
Modelos elásticos lineales y no lineales [Cedolin, 1977]:
Los modelos elásticos son muy conocidos por su simplicidad, pero dado que las cargas impulsivas y de impacto, en general, causan deformaciones no lineales y que la respuesta del material sometido a una carga impulsiva no se puede representar con un modelo elástico, estas teorías no son válidas para su aplicación en este problema.
Modelos viscoelásticos [Christensen, 1968]:
Los modelos basados en la viscoelasticidad han sido utilizados para la descripción de la fluencia y la relajación. Algunos autores han utilizado esta teoría suponiendo que debe existir una similitud entre la fluencia y los efectos de velocidad de deformación.
Modelos viscoplásticos [Bodner, 1975]:
Los modelos basados en la teoría de la viscoplasticidad han sido utilizados durante muchos años para la descripción de problemas de impacto. La teoría de la viscoplasticidad es muy conveniente especialmente para la modelización del hormigón armado y puede ser simplificada en gran medida, al menos para el caso unidimensional. El desarrollo de estos modelos para el hormigón se debe a Nilsson [Nilsson, 1979], mientras que su aplicación al armado fue realizada por Perzyna [Perzyna, 1966]
Modelos basados en la plasticidad [Willam, 1974; Hill, 1979; Rashid, 1980]:
o Elástico perfectamente plástico:
El material muestra un comportamiento elástico hasta un cierto nivel de carga; a partir de este nivel el comportamiento del material es perfectamente plástico. Por tanto, según este modelo, la superficie de plastificación depende únicamente del estado de tensión. La influencia de la

Antecedentes
69
velocidad de carga se puede tener en cuenta en este modelo aumentando el límite elástico de acuerdo a esta velocidad de carga.
o Elástoplástico con endurecimiento:
En lugar de experimentar deformación ilimitada para un nivel de carga constante, las tensiones se incrementan con la deformación. En este modelo los efectos de la velocidad de carga sobre la superficie de plastificación se pueden introducir, por ejemplo, a través de parámetros de endurecimiento por velocidad de carga.
Teoría endocrónica [Bazant, 1976; Valanis, 1971]
Se han desarrollado modelos basados en la teoría endocrónica tanto para el hormigón como para el armado. La teoría endocrónica se basa originalmente en la teoría viscoplástica, mejorada con una variable interna denominada tiempo intrínseco. A pesar de que esta teoría no fue generalmente aceptada, parece que es capaz de reproducir con bastante acierto algunos fenómenos como la influencia de la historia de carga o la influencia de la velocidad de deformación, especialmente para el armado.
Mecánica de la fractura [Reinhardt, 1984; Kobayashi, 1984]:
La mecánica de la fractura se puede dividir en la teoría lineal y la no lineal. La primera proporciona las bases para predecir la rápida propagación de fisuras inestables en el hormigón. Existen relaciones entre la tensión de fisuración, la longitud de la fisura y la velocidad de deformación. La teoría de la mecánica de la fractura lineal no tiene en cuenta ninguna deformación plástica o micro fisuras en el extremo interior de la fisura; sin embargo, deben tenerse en cuenta ya que la energía desarrollada en el proceso de plastificación o de micro fisuración es más importante que la desarrollada en la parte elástica. La teoría no lineal de la mecánica de la fractura incluye estas características del comportamiento del material.

Capitulo 2
70
Teoría del daño [Krajcinovic, 1981; Loland, 1980]:
Esta teoría se basa en que el daño aparece como una degradación irreversible del material sometido a deformación. Se introduce un parámetro de daño que, comparándolo con la mecánica de la fractura, establece un proceso continuo y global que no sucede únicamente en las inmediaciones de un defecto como una fisura.
Aproximación estocástica [Mihashi, 1977]:
En esta teoría se formula el proceso de rotura en el interior del hormigón a través de formulación estocástica. El hormigón se modela como un grupo de n elementos acoplados con varias fases diferentes. A partir de ahí se puede establecer una relación logarítmica entre la resistencia del hormigón y la velocidad de deformación.
Uno de los modelos que más se ha utilizado para representar el comportamiento del hormigón es el de Drucker-Prager [Drucker, 1952]. Se trata de un modelo elastoplástico con dependencia de la presión hidrostática. Este modelo queda definido por dos parámetros en cuanto a la superficie de plastificación y uno más en caso de que se defina la regla de flujo. Una modificación de este criterio de plastificación es el de Willam and Warnke [Willam, 1975] con el que se refleja la diferente resistencia del hormigón en el meridiano de compresión y en el de tracción. Para ello, este criterio depende de tres invariantes de tensión: el primer invariante del tensor de tensiones y los invariantes segundo y tercero del tensor desviador de tensiones. Por tanto, son necesarios tres parámetros para definir este criterio; estos parámetros son la resistencia a compresión simple, la resistencia a tracción simple y la resistencia a compresión biaxial. Este criterio representa con bastante fidelidad la pérdida de resistencia para deformaciones situadas más allá del límite elástico y los diferentes límites elásticos en tracción y en compresión. Esta pérdida de resistencia provoca problemas de sensibilidad de malla cuando se plantea el problema desde el método de los elementos finitos [De Borst, 1993]. Para resolver este problema se utilizan procedimientos de

Antecedentes
71
regularización de malla, como la introducción de términos viscoplásticos en las ecuaciones constitutivas del material [Sluys, 1992; Loret, 1990; López, 1997].
Otro método para representar el comportamiento del hormigón más allá del pico de resistencia es el Método de Control de Desplazamientos Generalizado [Yang, 1990], utilizado generalmente para análisis no lineales geométricamente. Gomes [Gomes, 2001] utiliza este método para evaluar los puntos de intersección entre las barras armado y la malla de elementos finitos que representa al hormigón.
Una característica de especial interés en la modelización del hormigón es el aumento de la resistencia asociada a la velocidad de deformación. A pesar de que se conoce este efecto desde hace más de 30 años y de que existen numerosos modelos en la actualidad que son capaces de representar este comportamiento, hay muchos aspectos que son todavía objeto de estudio. Uno de ellos es la dependencia de las propiedades del material con la velocidad de deformación. Habitualmente se utilizan los modelos que describen el comportamiento del hormigón con los parámetros estáticos del mismo; es decir, se supone que las propiedades materiales del hormigón son independientes de la velocidad de carga. De esta manera, se explican los efectos de la velocidad de carga a través de efectos inerciales de la masa del espécimen.
En cuanto a la modelización del armado en el interior del hormigón, existen tres posibilidades: el modelo incrustado, el modelo discreto y el disperso. En el primer tipo las barras del armado se encuentran dentro de los elementos que representan al hormigón. Este modelo ha sido utilizado en análisis numéricos bidimensionales. Su formulación original se debe a Philips y Zienkiewicz [Philips, 1976] y fue modificada por Chang et al. [Chang, 1987] para permitir que los segmentos tuvieran cualquier ángulo en relación con los ejes naturales del elemento de hormigón. En la modelización discreta las barras de acero se modelan como elementos barra situadas a lo largo de los nodos de los elementos del hormigón. Si se utiliza este método se debe tener

Capitulo 2
72
especial precaución en que coincidan los nodos del armado y del hormigón, para evitar problemas numéricos. En el modelo disperso se considera que el armado se encuentra repartido en todo el volumen del elemento. Este tipo de modelo es adecuado para estructuras en las que el armado está repartido uniformemente en la sección con barras de diámetros similares. En este sentido, Barbosa et al. ha demostrado que el comportamiento del hormigón es equivalente con una modelización de las barras de refuerzo discreta y con refuerzo disperso [Barbosa, 1998]. En diversos estudios se ha utilizado este elemento y este tipo de modelización del armado del hormigón, tanto para armado de acero como para fibras poliméricas [Barbosa, 1998; Elyasian, 2006; Adam, 2006].
En general, las particulares características que tiene el hormigón, descritas anteriormente en esta memoria, hacen que su modelización sea compleja. De hecho, se trata de un tema sobre el que se continúa investigando en la actualidad, por lo que aparecen continuamente nuevos modelos que tratan de reflejar este comportamiento. Muchos de estos modelos, a pesar de que parezcan ser muy fiables, no llegan a ser evaluados ni desarrollados comercialmente y, por tanto, no van más allá de sus autores [Liu, 2009; Koh, 2001]. Sin embargo, otros modelos son evaluados experimentalmente y finalmente implementados en algún código comercial de elementos finitos. A partir de ese momento el modelo puede ser ampliamente utilizado por los usuarios de ese código comercial.
Habitualmente los modelos más sencillos, que se corresponden con los más antiguos, están implementados en gran parte de los códigos comerciales de elementos finitos, aunque con distintas denominaciones. Sin embargo, los modelos de última generación suelen ser diferentes en cada código, estando particularmente adaptados a las características particulares de cada código. Es decir, si un código está especializado en cálculo de sucesos de corta duración, los últimos modelos implementados en ese código reflejarán las características del hormigón cuando está sometido a este tipo de sucesos.

Antecedentes
73
En particular, LSDYNA ofrece una gran variedad de modelos capaces de representar el comportamiento del hormigón en mayor o menor medida, y que serán brevemente descritos a continuación:
Soil and Foam Model (Mat 5): Este modelo, desarrollado por Krieg [Krieg, 1972] permite utilizar una curva definida por el usuario para representar la deformación volumétrica en función de la presión, tanto para carga como para descarga. En el plano desviador, el flujo plástico se define como una función cuadrática de la presión con coeficientes a definir por el usuario. Uno de los principales inconvenientes de este modelo, que es común a muchos de ellos, es la determinación de los parámetros necesarios para la definición del modelo, que requiere la realización de numerosos ensayos, en algunos casos de compleja ejecución. Por otra parte, en recientes investigaciones se ha demostrado que este material presenta serias deficiencias para representar el comportamiento del hormigón sometido a altas velocidades de deformación [Shugar, 1992], lo que supone un grave inconveniente para la modelización de impactos.
Pseudo-Tensor (Mat 16): Modelo utilizado para analizar estructuras de hormigón armado sometidas a cargas impulsivas. Este modelo se puede utilizar de dos modos diferentes; el primero se basa en una superficie de plastificación tabulada en función de la presión. Este modo se ajusta bien a modelos geológicos como el criterio de plastificación de Mohr-Coulomb tomando como límite el criterio de Tresca. En Desai et al. [Desai, 1984] se pueden encontrar ejemplos de conversión de datos de ensayos triaxiales de compresión a este tipo de modelo. El segundo modo de utilización consiste en la definición de dos funciones de plastificación con una migración desde una hasta la otra. En función del tipo de migración de una curva a la otra, se definen los parámetros del modelo. Dentro de este segundo modo existe la posibilidad de generar todos los parámetros a partir de las resistencias a tracción y a compresión simples del hormigón. Este material ha sido

Capitulo 2
74
recientemente utilizado por Huang [Huang, 2009] para la modelización del vuelco de un depósito vertical de hormigón.
Orientated Crack (Mat 17): Se trata de un modelo isótropo con comportamiento elasto-plástico y fisuras orientadas. En realidad, no se trata de un material específico para la modelización del hormigón, ya que el comportamiento elasto-plástico en general no describe bien al hormigón. En concreto, se ha demostrado que este material presenta serias deficiencias para representar el comportamiento del hormigón sometido a altas velocidades de deformación [Shugar, 1992]. No obstante, la capacidad para generar fisuras orientadas hacen viable su uso para determinadas modelizaciones en las que se presenten sucesos de larga duración y en los que no se pretenda modelizar la plastificación del hormigón.
Geological Cap (Mat 25): Los modelos tipo “cap” utilizan superficies de plastificación cerradas en el eje de tensiones hidrostáticas y han sido utilizados por numerosos investigadores durante los últimos 20 años para describir el comportamiento de los materiales geológicos. Están basados en el hecho de que la histéresis volumétrica exhibida por la mayoría de los materiales geológicos se puede describir con un modelo de plasticidad, siempre que el modelo esté basado en una superficie de plastificación que incluya condiciones de tensión hidrostática [Sandler, 1976]. Un modelo de este tipo fue implementado por primera vez en lenguaje FORTRAN en 1979 [Sandler, 1979]. El Geological Cap Model necesita definir 12 parámetros de entrada, lo que supone un inconveniente a la hora de utilizarlo, ya que son necesarios gran cantidad de ensayos (en ocasiones caros y complicados) para determinar los valores de estos parámetros. Además, ha sido demostrado que este material presenta serias deficiencias para representar el comportamiento del hormigón sometido a altas velocidades de deformación [Shugar, 1992].

Antecedentes
75
Concrete Damage (Mat 72): Este modelo se desarrolló para analizar estructuras de hormigón armado sometidas a cargas impulsivas. También se conoce como “Release III of the Karagozian and Case (K&C) Concrete Model”; fue desarrollado por Malvar [Malvar, 1997] e implementado para LSDYNA por Len Schwer. Ofrece la posibilidad de generar los parámetros necesarios para la definición completa del material a partir de la resistencia a compresión simple del hormigón. Se trata de una extensión del modelo Pseudo-Tensor (Mat 16). Hay que tener en cuenta que no incluye la dilatancia debida a esfuerzos cortantes.
Concrete Model Release III (Mat 72R3): Es un modelo desarrollado por la empresa Karagozian & Case como sustituto del modelo Concrete Damage; a pesar de que éste se ha mantenido en las versiones posteriores por motivos de compatibilidad. Se trata de un modelo definido por tres parámetros, que utiliza tres superficies de fallo y que incluye formulaciones para el daño y para los efectos debido a la velocidad de carga. Este modelo es una evolución del Pseudo-Tensor, al que se le ha añadido la capacidad de generación de los parámetros necesarios para definir el material a partir de la resistencia a compresión simple del hormigón [Schwer, 2005]. La descripción completa del modelo y su validación a partir de datos experimentales se puede encontrar en [Malvar, 1997].
Soil Concrete (Mat 78): Se utiliza para modelar el comportamiento de suelos y hormigones. El modelo se define a través de curvas que describen el comportamiento del material en función de la presión. Estas curvas definen la deformación volumétrica, la plastificación (a través de la tensión equivalente de Von Mises o del segundo invariante del tensor desviador), la deformación plástica a la que comienza la fractura y la deformación plástica a la que se alcanza la resistencia residual. Además tiene la posibilidad de eliminar el elemento cuando la tensión alcanza un límite predefinido.

Capitulo 2
76
Winfrith Concrete (Mat 84): Es un modelo que incluye el armado como disperso dentro del hormigón y que considera la fisuración también dispersa (pseudo crack). Se implementa con elementos hexaédricos sin nodos intermedios y un solo punto de integración. Este modelo se desarrolló por Broadhouse et al. [1987] y fue validado a través de experimentos realizados por este mismo autor [Broadhouse, 1995]. Además, ha sido recientemente utilizado por Arros [Arros, 2006] en el estudio del impacto de un avión sobre una estructura de hormigón y por Algaard [Algaard, 2005] para el estudio de la perforación de forjados de hormigón por la caída de objetos durante su construcción.
Brittle Damage (Mat 96): Se trata de un modelo anisótropo con daño frágil que fue diseñado para modelar el hormigón, aunque se puede adaptar a cualquier material frágil. Es capaz de representar la degradación progresiva de las resistencias a tracción y a cortante. Además, tiene en cuenta el fallo a compresión, el daño del material y la dependencia del mallado. La descripción completa de este material se puede encontrar en [Govindjee, 1995].
Johnson Holmquist Concrete (Mat 111): Este modelo se utiliza para simular el comportamiento del hormigón sometido a grandes deformaciones, grandes velocidades de carga y altas presiones. La resistencia equivalente se expresa en función de la presión, velocidad de carga y daño. La presión se expresa en función de la deformación volumétrica e incluye el efecto de aplastamiento permanente. El daño se acumula en función de la deformación volumétrica plástica, deformación equivalente plástica y presión. Una descripción detallada del modelo se puede encontrar en [Holmquist, 1993]. Este modelo ha sido recientemente utilizado por Tai [Tai, 2006] para la modelización de placas de hormigón armado sometidas a impactos.
Schwer Murray Cap (Mat 145): Este material, conocido también como “Continuous Surface Cap Model”, es una variante del material “Geological Cap” (Mat 25), definido por tres invariantes y que además

Antecedentes
77
incluye viscoplasticidad para velocidad de carga y modela la pérdida de resistencia debida a las deformaciones más allá del límite elástico a través de la evaluación del daño. Este modelo es apropiado para geomateriales, como suelos, hormigón o rocas. En este material los elementos son eliminados cuando el daño es superior a 0.99.
CSCM Concrete (Mat 159): Se trata de un modelo de superficie cerrada definido a partir de 3 invariantes y con superficie contínua y suavizada. Los efectos producidos por la velocidad de carga se modelan a través de la viscoplasticidad. Este modelo ha sido seleccionado por la Administración Americana de Carreteras (Federal Highway Administration) como modelo de referencia para todos los análisis relacionados con impactos de vehículos contra estructuras de hormigón situadas en carreteras. Una descripción más detallada de este modelo se realizará más adelante en este texto, dado que es el modelo elegido para este trabajo. No obstante, la descripción teórica completa se puede encontrar en [Murray, 2007a, 2007b].
Concrete EC2 (Mat 172): Se utiliza únicamente con elementos tipo lámina o lineales. Es capaz de representar el comportamiento del hormigón simple o con el refuerzo disperso. El modelo incluye fisuración en tracción y aplastamiento en compresión; además es sensible a la temperatura, por lo que se puede utilizar en estudios de estructuras sometidas a fuego. Los parámetros para los materiales y las ecuaciones constitutivas se toman del Eurocódigo 2, Parte 1.2 (de ahí su nombre).
Reinforced Concrete Beam (Mat 174): Este modelo es válido únicamente para modelar el comportamiento del hormigón a través de elementos lineales cuando está sometido a cargas cíclicas provocadas por un sismo. El material es capaz de representar el comportamiento del hormigón simple o con el refuerzo disperso.

Capitulo 2
78
Concrete Beam (Mat 195): Se utiliza para modelar el hormigón en elementos lineales. Se trata de un material elastoplástico con una curva tensión-deformación en función de la velocidad de deformación definida por el usuario. Además se puede definir la rotura del material en función de la deformación plástica alcanzada.
La lista de modelos materiales disponibles es, tal como se ha descrito, bastante extensa, y exige un profundo conocimiento del comportamiento general del hormigón por parte del usuario de LSDYNA. Además, para usar algunos de estos modelos es necesario conocer muchos parámetros del hormigón que se desea modelar y que se obtienen a través de ensayos que no son abordables en muchos laboratorios de materiales. No obstante, algunos modelos ofrecen la posibilidad de generar el modelo completo de forma automática a partir de algunos datos básicos como la resistencia a compresión simple o el tamaño máximo del árido. Otros ofrecen valores típicos o ecuaciones de ajuste para los parámetros necesarios, con lo que el usuario tiene una mayor flexibilidad para adaptar algunas características de su material manteniendo invariables las demás.
2.7. UNA VISIÓN GENERAL DEL MODELO MATERIAL CSCM
De los modelos descritos en el apartado anterior, el que mejor refleja el comportamiento del hormigón es el CSCM (Mat 159). Dado que este modelo se utilizará más adelante en este trabajo, se ha realizado un estudio en profundidad de su funcionamiento, sus capacidades y su alcance. Se incluye a continuación una descripción de estas capacidades, así como de los parámetros requeridos para su definición.

Antecedentes
79
2.7.1. SUPERFICIE DE PLASTIFICACIÓN
En líneas generales, la superficie de plastificación que utiliza el modelo elegido es una superficie cerrada con intersección suave entre la superficie de fallo a cortante y la superficie de endurecimiento y compactación isótropa (superficie de cierre).
En la figura 2.22 (izda.) se presenta una vista tridimensional de la superficie de plastificación en el triedro de tensiones principales y en la figura 2.22 (dcha.) se muestra una sección de esta superficie por un plano meridional en función de la presión y de la resistencia a cortante. En esta figura se ha destacado la superficie de fallo a cortante (Shear Surface), la superficie de cierre (Cap) y la intersección suave entre las dos.
Fig. 2.22: Vista tridimensional de la superficie de plastificación en el triedro de tensiones principales (izda.) y Sección de la superficie de plastificación por un plano meridional en la que
se aprecian la superficie de fallo a cortante (Shear Surface), la superficie de cierre (Cap) y la intersección suave entre ambas [Murray, 2007a] (dcha).
Para la formulación analítica del modelo se utilizan los tres invariantes de tensiones:
1J : Primer invariante del tensor de tensiones
2'J : Segundo invariante del tensor desviador de tensiones

Capitulo 2
80
3'J : Tercer invariante del tensor desviador de tensiones
Además se utiliza un parámetro (k) para definir el endurecimiento de la superficie de cierre, con lo que la superficie completa se escribe:
2 21 2 3 2( , ' , ' , ) ' f cf J J J k J F F (2.76)
Donde:
fF : Función de fallo a cortante
cF : Función de cierre
: Función de escala Rubin
Durante el cálculo se actualiza el tensor de tensiones para cada paso y con las nuevas tensiones obtenidas se obtienen los invariantes actualizados ( 1
TJ , 2'TJ , 3'
TJ ); es ese instante pueden ocurrir dos cosas:
Si 1 2 3( , ' , ' , ) 0T T T Tf J J J k tenemos tensiones elásticas.
Si 1 2 3( , ' , ' , ) 0T T T Tf J J J k tenemos un estado elastoplástico y se inicia
el algoritmo de plasticidad, que lleva de nuevo el estado tensional a la superficie de plastificación, con lo que: 1 2 3( , ' , ' , ) 0P P P Pf J J J k
Superficie de fallo a cortante
Los datos para el ajuste de esta superficie se obtienen a partir de los ensayos uniaxial a compresión, uniaxial a tracción, triaxial a tracción con la misma tracción en las tres direcciones y triaxial a compresión para una presión de 70 MPa. Los resultados de los dos primeros ensayos se obtienen a partir de las recomendaciones dadas en el CEB [CEB, 1993] y para el ensayo triaxial a tracción se toman los resultados del uniaxial a tracción. Con ello se

Antecedentes
81
modela la resistencia a tracción biaxial aproximadamente igual a la resistencia a tracción uniaxial, tal como recomienda el CEB [CEB, 1993].
Finalmente, la expresión analítica que define la superficie de fallo a cortante en función de la presión y de 4 parámetros más es :
11 1exp J
fF J J (2.77)
Los 4 parámetros necesarios para la completa definición de esta superficie son: , , , y son parámetros de entrada para el usuario. Los valores de y son invariables, mientras que y se pueden obtener a partir de la tensión uniaxial de compresión a través de la siguiente función de interpolación con los coeficientes dados en la tabla 2.1.
2' 'p c p c pP A f B f C (2.78)
Tabla 2.1 : Coeficientes para el ajuste de la superficie de fallo a cortante en función de la resistencia a compresión simple
P pA pB pC 1( ) MPa 0 3( )MPa 0 2( )MPa 1.929E-02 1( )MPa
1( )MPa 1.3216 E-02 2( )MPa 2.3548 E-02 1( )MPa 0.2140058 1( )MPa
Superficie de cierre
Esta superficie define la compactación y endurecimiento del hormigón debido al colapso de los poros. Además se mueve a lo largo del eje de tensiones hidrostáticas para simular cambios en la plasticidad volumétrica; se mueve hacia fuera para simular compactación (deformaciones plásticas volumétricas de compactación) y hacia adentro para simular dilatación (deformaciones plásticas volumétricas de dilatación).
La posición inicial de esta superficie es el invariante de presión para el que la curva tensión hidrostática-deformación volumétrica se hace no lineal;

Capitulo 2
82
es decir, el punto en el que comienza la plasticidad en compresión isótropa. Este punto es menor en hormigones con menor resistencia.
Para estados tensionales situados en la zona de tracción o para bajas presiones de confinamiento la función que define la superficie de cierre es la unidad y por tanto la superficie completa de plastificación resulta:
2 2 2 21 2 3 2 2( , ' , ' , ) ' 'f c ff J J J k J F F J F (2.79)
Cuando el estado tensional se sitúa entre las zonas de baja presión y las de alta, la función de cierre es una elipse, definida por la expresión:
1 1 1
1 2, 12
c
J L k J L k J L kF J k
X k L k
(2.80)
Donde L k se define como:
0
0
si en otro casok k k
L kk
La intersección entre las superficies de fallo a cortante y de cierre se encuentra en 1J k . Por tanto, 0k es el valor de 1J en la intersección inicial
entre ambas superficies; es decir, antes de que aparezca el endurecimiento (antes de que la superficie de cierre se haya desplazado).
La intersección de la superficie de cierre con el eje 1J se sitúa en
1J X k . Esta intersección depende de la relación entre los ejes mayor y
menor de la elipse (R), de forma que:
fX k L k RF L k (2.81)

Antecedentes
83
Donde el parámetro R que relaciona los ejes de la elipse, es uno de los parámetros que el usuario debe definir.
Por otra parte, el movimiento de la superficie de cierre está basado en la regla de endurecimiento :
21 0 2 01 exp D X X D X Xp
v W (2.82)
Donde:
pv es la deformación volumétrica plástica
W es la máxima deformación volumétrica plástica. Determina la máxima compactación volumétrica plástica y es un parámetro de entrada del modelo.
0X es la posición inicial de la superficie cuando 0k k .
Determina la presión a la que se inicia la compactación en compresión isótropa y es un parámetro de entrada del modelo. Combinado con R determina la presión a la que se inicia la compactación en deformación uniaxial
1D (parámetro de endurecimiento lineal) y 2D (parámetro de
endurecimiento cuadrática) son parámetros de entrada del modelo. Determinan la forma de las curvas presión-deformación volumétrica.
Los parámetros que definen la superficie de cierre ( 1 0 2, , , ,R W D X D ) se
obtienen a través del ajuste de las curvas presión-deformación volumétrica para compresión isótropa y deformación uniaxial. Los valores por defecto para estos parámetros están basados en los siguientes datos y suposiciones:
1) La posición inicial de la superficie de cierre es el invariante de presión al cual la curva presión-deformación volumétrica pierde su linealidad. Esta no linealidad se inicia a menores presiones para

Capitulo 2
84
hormigones de menores resistencias; por tanto, la posición inicial de la superficie de cierre disminuye con la disminución de la resistencia del hormigón.
2) El parámetro de forma (R), combinado con la posición inicial de la superficie de cierre, establece la presión a la que la curva presión-deformación volumétrica se convierte en no lineal. Un parámetro de forma de 5 es típico y se utiliza habitualmente por los autores del modelo para un hormigón de 45 MPa.
3) El máximo cambio de volumen plástico (W) establece la zona en deformación volumétrica en la que la curva deformación volumétrica-presión es no linear. Generalmente el máximo cambio de volumen plástico es aproximadamente igual a la porosidad. Un valor de 0.05 indica una porosidad del 5%. A pesar de que no se espere una compactación total de los poros, este parámetro se utiliza para tener una forma razonable en la curva deformación volumétrica-presión en la zona de baja a moderada presión.
4) El parámetro de endurecimiento lineal (D1) establece la forma de de la curva deformación volumétrica-presión a pesar de que produce una repentina transición en el comienzo de la no linealidad. El parámetro de endurecimiento cuadrático (D2) suaviza esta transición.
5) El parámetro 0X se puede obtener a partir de la resistencia a
compresión simple del hormigón, utilizando la ecuación de interpolación:
20 8.769178 3 ' 7.3302306 2 ' 84.85 ( )c cX e f e f MPa (2.83)
En la figura 2.23 se muestra un ejemplo de una curva deformación volumétrica-presión para una compresión isótropa, en la que se puede ver cómo afecta cada parámetro a la forma de la curva.

Antecedentes
85
Fig. 2.23: Modificación de una curva deformación volumétrica-presión para una compresión
isótropa por los parámetros 1 2, y W D D [Murray, 2007a]
Función de escala Rubin ( )
La intersección de una superficie de plastificación que dependa sólo de dos invariantes con el plano desviador es un círculo; no obstante, los datos experimentales indican que la superficie de plastificación depende de tres invariantes y que estas curvas no son círculos para bajas presiones de confinamiento. La función de escala Rubin modifica los círculos que definen una superficie de plastificación de dos invariantes para convertirlos en hexágonos irregulares, en función del ángulo ̂ en el plano desviador (figura 2.24).

Capitulo 2
86
Fig. 2.24: Vista de la superficie de plastificación en el plano desviador y comparación con el
círculo obtenido para un modelo basado en 2 invariantes [Murray, 2007a]
El ángulo ̂ se define únicamente en el intervalo ˆ6 6 y se
relaciona con los invariantes 2'J y 3'J en la forma:
33 3 2
2
3 3 'ˆ ˆsin 32 '
JJJ
(2.84)
De forma que:
3ˆ ˆ 1
6J para TXC (compresión)
3ˆ ˆ0 0J para TOR (Torsión)
3ˆ ˆ 1
6J para TXE (Tracción)
La forma de la función de Rubin es:

Antecedentes
87
2
1 1 2 0
2
42
b b b bb
(2.85)
donde: 22
2ˆ ˆ ˆcos sin sinb a b
1ˆ ˆcos sinb a a
20 3 / 4b b a
y dónde: 212 3b Q a
2
1 1 2 0
2
42
a a a aa
a
,
con: 20 1 22 1a Q Q
1 2 1 23 2 1a Q Q Q
2 2a Q
Así que, finalmente, el valor de depende del ángulo ̂ y de los
valores de 1Q y 2Q que se obtienen experimentalmente en función de la
presión. Con todo ello, la resistencia en TOR se modela como 1 fQ F y la
resistencia en TXE como 2 fQ F , ya que 1 /Q TOR TXC y 2 /Q TXE TXC .
Hay distintas maneras de ajuste de los parámetros 1Q y 2Q ; a
continuación se describen algunos de ellos:
1) Ajuste más general: La forma de la superficie de plastificación en el plano desviador pasa de triangular a hexagonal irregular y a circular, en función de la presión. Los valores de entrada para la

Capitulo 2
88
definición de 1Q y 2Q son: 1 , 2 , 1 , 2 , 1 , 2 , 1 , 2 , que se
relacionan con 1Q y 2Q en la forma:
1 11 1 1 1 1exp JQ J (2.86)
2 12 2 2 2 1exp JQ J (2.87)
2) Ajuste de Morh-Coulomb: Una línea recta entre los estados de TXE y TXC. Los valores de 1Q y 2Q se estiman a través del ángulo de
fricción :
21
2
31
QQQ
(2.88)
23 sin3 sin
Q
(2.89)
3) Ajuste de dos parámetros: Los valores de 1Q y 2Q permanecen
constantes con la presión. Todos los parámetros son nulos excepto 1 y
2 . Con ello tenemos una superficie de plastificación con forma de
hexágono irregular en el plano desviador.
4) Ajuste de Willam-Warnke: Se selecciona 2Q como constante o
como función de la presión. Se ajusta 1Q a la superficie TOR de
Willam-Warnke:
2 2 22 2 2 2 2
1 222 2
3 1 2 1 * 3 1 5 4
3 1 1 2
Q Q Q Q QQ
Q Q
(2.90)
Los parámetros 1 , 2 , 1 , 2 , 1 , 2 , 1 y 2 establecen la forma de la
superficie de plastificación cuando la tensión es de compresión, pero no cuando esta es de tracción. En este caso, el modelo toma automáticamente

Antecedentes
89
1 0.5774Q y 2 0.5Q . Estos valores simulan una superficie triangular en el
plano desviador y no pueden ser modificados por el usuario. Con esta superficie, los valores alcanzados en uniaxial, biaxial con los mismos valores e hidrostática son aproximadamente los mismos. Realmente, con este modelo las resistencias a tensiones biaxiales son el 1% de las unidireccionales, tal como establece el CEB [CEB, 1993].
Para una transición suave entre las regiones de tracción y compresión, el usuario debe establecer 1 0.5774Q y 2 0.5Q para la presión 0. Esto se
puede conseguir estableciendo 1 1 0.5774 y 2 2 0.5774 . En la zona
de transición entre las superficies triangulares en P=0 y los hexágonos irregulares para P>0, 2Q se establece para obtener una resistencia a
compresión biaxial que es aproximadamente el 15% más grande que la resistencia uniaxial de compresión, tal como se establece en el CEB [CEB, 1993].
Tabla 2.2 : Coeficientes para el ajuste de la función de escala de Rubin en función de la resistencia a compresión simple
P pA pB pC 1
1 ( ) MPa -1.9972E-05 3( )MPa 2.2655E-04 2( )MPa 8.174E-02 1( )MPa 1
1 ( ) MPa -3.8859E-07 3( )MPa -3.9317E-04 2( )MPa 1.582E-03 1( )MPa 1
2 ( ) MPa -1.9972E-05 3( )MPa 2.2655E-04 2( )MPa 8.174E-02 1( )MPa 1
2 ( ) MPa -4.8697E-07 3( )MPa -1.8883E-06 2( )MPa 1.882E-03 1( )MPa
Los valores de 1 , 2 , 1 y 2 son invariables, mientras que 1 , 2 , 1
y 2 se pueden obtener a partir de la tensión uniaxial de compresión a través
de la función de interpolación (2.78) con los coeficientes dados en la tabla 2.2.

Capitulo 2
90
2.7.2. FORMULACIÓN DEL DAÑO
La formulación del daño pretende modelar la pérdida de resistencia del hormigón sometido a grandes deformaciones así como la pérdida de rigidez en ciclos de carga y descarga. Para ello se utiliza un factor de daño tal como se describe en el trabajo de Simo y Ju [Simo, 1987]:
1d vpij ijd (2.91)
donde:
dij Tensión con daño
d Factor de daño. Su rango va desde d=0 (sin daño) a d=1 (completamente dañado)
vpij Tensión sin daño
El efecto del factor de daño es el de reducir los módulos de rigidez y compresibilidad de forma simultánea y proporcional (isótropa). El daño se inicia y se acumula cuando los términos basados en la energía de deformación superan el umbral de daño. La acumulación del daño a través del parámetro d se basa en dos formulaciones distintas, en función de si el daño se produce para tensiones de tracción o de compresión. En la figura 2.25 se puede ver cómo se reducen la resistencia y el módulo elástico con el factor de daño (d).

Antecedentes
91
Fig. 2.25: Reducción de la resistencia y del módulo elástico con el factor de daño (d) [Murray, 2007a].
Daño frágil
La acumulación del daño frágil depende de la máxima deformación principal:
2maxb E (2.92)
Donde b es un término de energía que depende de la acumulación de la
deformación total a través de max . El daño frágil se inicia cuando b supera
un umbral inicial 0br .
Daño dúctil
La acumulación del daño dúctil depende de las componentes de la deformación total:
12d ij ij (2.93)

Capitulo 2
92
Donde d es un término de energía. ij son las tensiones elastoplásticas
(con endurecimiento cinemático) calculadas antes de la aplicación del daño y los efectos de velocidad de carga. El daño dúctil se inicia cuando d supera el
umbral inicial 0dr
Umbrales de daño
El umbral de daño inicial se encuentra sobre la superficie de plastificación. Una excepción al inicio del daño con el inicio de la plasticidad se da cuando los efectos debidos a la velocidad de carga se modelan a través de la viscoplasticidad. Con viscoplasticidad el inicio del daño se retrasa:
0 1 ss
Er rr E
(2.94)
Donde sr es el umbral de daño antes de la aplicación de la viscoplasticidad y 0r es el umbral desplazado por la viscoplasticidad. Cuando
se modelan los efectos de la velocidad de carga, es mayor que 0 y el umbral de daño resulta mayor que el inicial. Por tanto, el inicio del daño se retrasa mientras la plasticidad se acumula. Esta característica no requiere parámetros de entrada y se soluciona internamente en el modelo basándose en la teoría de la viscoplasticidad.
Función de debilitación
La función de debilitación define la forma en que el daño se acumula. Para ello se define el parámetro de daño ( )bd , en función del tipo de daño:

Antecedentes
93
Daño frágil:
0
0.999 1( ) 11 exp b bb C r
DdD D
(2.95)
Daño dúctil:
0
max 1( ) 11 exp b bd A r
d BdB B
(2.96)
Conforme el daño se acumula, el parámetro de daño aumenta desde un valor inicial de 0 hasta el máximo 1. Los parámetros C y D son valores de entrada para el usuario y establecen la forma de la curva de debilitación. El parámetro maxd es el máximo nivel de daño que puede ser obtenido. Para
tensiones de tracción y bajas presiones de confinamiento se establece como 0.999 para evitar dificultades computacionales asociadas a rigidez nula correspondiente a un valor de 1. Con presiones de confinamiento moderadas, el valor es menor que 0.999, de acuerdo con los resultados obtenidos a partir del TXC. Para que este valor sea menor que 0.999 se utiliza la siguiente expresión:
Si 2
1
3 '1
JJ
, entonces 1.5
2max
1
3 'Jd
J
(2.97)
Por otra parte, el máximo valor de daño también varía con los efectos de la velocidad de carga, para lo que se utiliza la expresión:
1.5
max max *max 1, 1s
Ed dr E
(2.98)
Para presiones de confinamiento moderadas resulta conveniente reducir el valor del parámetro A; para ello se define la función:

Capitulo 2
94
modmax 0.001 pA A d (2.99)
Donde modp es un parámetro de entrada para el usuario. Su valor por defecto es 0 y para otros valores positivos su efecto es reducir el valor de A cuando el daño máximo es menor que 0.999; para otros valores del daño máximo el valor de A no resulta afectado por modp . Teniendo en cuenta que en nuestro problema no existe confinamiento, se tomará el valor por defecto, con el que no se reduce el valor de A
Para modelización, se define la energía de fractura como el área bajo la zona de debilitación en una curva tensión-deformación, desde el pico hasta la debilitación completa. Una ecuación del CEB relaciona la energía de fractura medida en tracción con la resistencia a compresión simple y el tamaño máximo del árido:
0.7
0'
10T
cF F
fG G
(2.100)
Donde 0FG es la energía de fractura para un hormigón HM-10 en
función del máximo tamaño del árido. Se puede expresar en función del tamaño máximo del árido (As) como:
20 0.000520833* 0.75* 1.9334FG As As (2.101)
El modelo necesita los valores de la energía de fractura para tracción simple (
TFG ), compresión simple ( FcG ) y cortante ( FsG ). Los valores que toma
por defecto para la energía de fractura a tracción simple son los que da la expresión
TFG ; para la energía de fractura a compresión simple se establece
un valor de 100 veces el de tracción simple y para la energía de fractura a cortante se utiliza el mismo valor que el de la energía de fractura para tracción simple.

Antecedentes
95
100*Fc FtG G (2.102)
Fs FtG G (2.103)
Otros parámetros de entrada son el umbral de daño para tracción y para compresión y el máximo nivel de daño; para ello:
Cada umbral de daño se sitúa en el punto en el que la energía elástica de deformación inicia la debilitación. El umbral de daño frágil se establece igual al nivel de energía elástica de deformación en tracción simple en el pico de tensión. El umbral de daño dúctil se establece igual al nivel de energía elástica de deformación en compresión simple en el pico de tensión.
La forma de las curvas de debilitación se establece a partir de los parámetros B y D. Un valor de B=100 se establece para el reblandecimiento inicial gradual en compresión (superficie plana). Un valor de D=0.1 se establece para el reblandecimiento inicial en tracción (superficie apuntada).
El máximo parámetro de daño establece el máximo nivel de daño alcanzado en tracción simple y compresión simple. El nivel máximo de daño se establece en 0.99 tanto para la formulación a tracción como para compresión.
Indicación de la energía de fractura
A partir de los valores de TFG , FcG , FsG , establecidos por el usuario, el
modelo calcula internamente los valores umbral de energía de fractura para tracción y para compresión a partir de ecuaciones que interpolan entre los tres valores de energía en función del estado tensional. Este estado tensional

Capitulo 2
96
se define a través de una proporción entre los invariantes de tensión llamado trans, de forma que si la presión es tracción ( 1 0J ) tenemos que:
BrittleF Fs Ft FsG G trans G G (2.104)
Donde 1
23 '
pwrtJtransJ
Mientras que si la presión es compresión ( 1 0J ) tenemos que:
DuctileF Fs Fc FsG G trans G G (2.105)
Donde 1
23 '
pwrcJtransJ
Es decir, la variable trans toma valores situados entre 0 (cortante puro) y 1 (tracción o compresión simple). La interpolación depende de dos parámetros introducidos por el usuario, pwrt para la transición de tracción a cortante y pwrc para la transición de compresión a cortante.
Regulación de la sensibilidad del tamaño de la malla
El uso de las expresiones (5.20) y (5.21) implica que la menor energía de fractura (daño máximo) estará en los elementos más pequeños, por lo que el comportamiento en debilitación dependerá del tamaño de la malla.
Para evitar esto, el modelo mantiene constante la energía de fractura independientemente del tamaño del elemento. Esto se hace incluyendo la longitud del elemento (calculada como raíz cúbica del volumen) y un término de energía de fractura tipo fG , en el parámetro de debilitamiento A y en el C.

Antecedentes
97
Este término de energía se obtiene integrando la curva analítica de tensión-desplazamiento:
0
1 'f xG d f dx
Donde x es el desplazamiento y 0x es el desplazamiento en el pico de
esfuerzo 'f . Para realizar esta integración es necesario tener en cuenta la
diferencia de umbrales de daño 0r . Este valor depende de si se está
modelando el daño a tracción o a compresión.
Energía de fractura con efectos dinámicos
Cuando los efectos de la velocidad de carga se modelan con viscoplasticidad, el usuario tiene la opción de incrementar la energía de fractura en función de los efectos dinámicos de la velocidad de carga. Esto se realiza a través de la función repow:
1repow
vpf f s
EG Gr E
Donde fG es la energía de fractura (a tracción o a compresión) y vpfG es
el valor escalado con los efectos dinámicos. Se recomienda un valor de repow de 1. Con este valor el incremento de la energía de fractura con los efectos dinámicos es aproximadamente proporcional al incremento en resistencia debida a los efectos dinámicos. Con un valor de repow de 0, la energía de fractura se mantiene constante independientemente de los efectos dinámicos. El rango recomendado está entre 0.5 y 1.

Capitulo 2
98
Seguimiento del daño
Se siguen dos parámetros del daño: el parámetro de daño dúctil ( dd ) y el parámetro de daño frágil ( bd ). El primero incrementa su valor cuando la tensión es de compresión y sobrepasa el umbral de daño en ese momento; el segundo incrementa su valor cuando es de tracción y sobrepasa el umbral de daño en ese momento. Cuando está inactivo el parámetro de daño frágil (compresión) se establece temporalmente a 0 para modelar la recuperación de rigidez con el cierre de la fisura. El máximo valor de bd se recupera cuando la tensión vuelve a ser de tracción.
Para controlar la recuperación de la rigidez el usuario tiene el parámetro recov. Su valor por defecto es 0, lo que significa que cuando la tensión cambia a compresión se recupera el 100% de la rigidez y la resistencia inicial. Un valor de 1 significa que no se recupera en absoluto, por tanto el daño frágil permanece siempre en su máximo nivel. El parámetro de daño aplicado a las 6 tensiones es igual al actual máximo parámetro de daño dúctil o frágil: max ,b dd d d
Existe la opción de controlar la recuperación de la rigidez en función de la deformación volumétrica y la tensión; es decir, se recupera la rigidez cuando la tensión sea de compresión y la deformación volumétrica sea también de compresión. Para seleccionar esta opción, recov se especifica por el usuario con un valor inicial entre 10 y 11; el programa internamente resta el valor de 10 y aplica esta segunda opción para la recuperación de la rigidez.
Erosión
Un elemento pierde toda su resistencia y rigidez cuando d tiende a 1. Para prever problemas computacionales, la erosión del elemento es una opción del usuario. Un elemento erosiona cuando d>0.99 y la deformación

Antecedentes
99
máxima principal es más grande que un valor introducido por el usuario, llamado ERODE.
2.7.3. FORMULACIÓN DE LOS EFECTOS DE LA VELOCIDAD DE
DEFORMACIÓN
En cuanto a la modelización del material, los efectos de la velocidad de deformación afectan a la superficie de plastificación, a la superficie de daño y a la energía de fractura. En este punto revisamos la aplicación a la superficie de plastificación, ya que los otros dos casos fueron descritos anteriormente.
Formulación viscoplástica
Este modelo utiliza un algoritmo basado en formulación viscoplástica para el que se requiere un parámetro de efecto de velocidad de deformación, llamado coeficiente de fluidificación ( ) que es una entrada del usuario.
En cada paso este algoritmo interpola entre la tensión elástica inicial ( T
ij ) y la tensión viscosa ( Pij , sin efectos de velocidad de carga) para
establecer la tensión viscoplástica ( vpij , con efectos de velocidad de carga), de
esta manera:
1vp T Pij ij ij , con
1t
t
Esta interpolación depende del coeficiente de fluidificación y del tiempo de paso. Cuando el coeficiente de fluidificación es igual a 0 la tensión final alcanzada es la tensión viscosa y por tanto la solución es independiente de la velocidad de carga. Si el coeficiente de fluidificación tiende a infinito la tensión final alcanzada sería la elástica para todos y cada uno de los pasos,

Capitulo 2
100
con lo que se tiene un modelo con ausencia de flujo plástico. Por tanto el flujo plástico disminuye a medida que aumenta el efecto de la velocidad de carga.
Además, para modelizar grandes deformaciones se utiliza un algoritmo basado en 2 parámetros, 0 y N, de forma que:
0N
Datos necesarios para la formulación viscosa
La velocidad de deformación se modela de forma diferente para tracción y para compresión. Para ello se utilizan 4 parámetros de entrada: 0t y tn
para ajustar los datos de tracción simple y 0c y cn para ajustar los datos de
compresión simple.
Para los estados de tensión situados entre tracción simple y compresión simple, el parámetro de fluidificación se interpola como función de la relación entre los invariantes de tensión. Para tracciones ( 1 0J ), tendremos que:
s t strans
Donde 1
23 '
pwrtJtransJ
Mientras que para compresiones ( 1 0J ) tendremos:
s c strans

Antecedentes
101
Donde 1
23 '
pwrcJtransJ
Aquí los parámetros t , s y c son los parámetros de fluidificación en
tracción simple, cortante puro y compresión simple. Estos parámetros se determinan a través de:
0t
tt N
0c
cc N
s tSrate
Donde los valores de tN , cN , 0t , 0c y Srate son valores de entrada del
modelo.
Por otra parte, el modelo viscoplástico puede predecir efectos de velocidad de carga bastante grandes para grandes velocidades de carga ( 100 ). Para limitar estos efectos en grandes velocidades de carga, el usuario puede introducir un límite de sobrecarga en tensión ( overt ) y otro en compresión ( overc ). Estos parámetros limitan el cálculo del parámetro de fluidificación, de forma que:
Si E over , entonces overE
Donde si la tension es de compresion si la tension es de traccion
over overtover overc
Y overc y overt son valores de entrada del modelo.
En cuanto a los valores numéricos que toman los parámetros necesarios para la formulación viscosa, estos datos generalmente se reproducen en función de la relación entre la resistencia estática y la dinámica, llamada factor de amplificación dinámica (DAF). El DAF utilizado procede de la experiencia del autor del modelo en varios contratos de defensa en EEUU, en particular con hormigón con resistencia alrededor de 45 MPa. Estas

Capitulo 2
102
especificaciones proporcionan un buen ajuste tanto en tensión como en compresión de los datos experimentales presentados anteriormente. Los datos para el DAF se han obtenido realizando numerosas simulaciones y seleccionando los parámetros viscoelásticos de velocidad de carga a través del método de prueba y error.
Los valores por defecto para tN , cN y Srate son invariables, mientras
que 0t , 0c y overt se pueden obtener a partir de la resistencia a compresión
simple del hormigón, a través de las expresiones:
13 2 10 50 8.0614774 10 * ' 9.77736719 10 * ' 5.0752351 10t c cf f (s, MPa)
11 2 7 40 1.2772337 10 * ' 1.0613722 10 * ' 3.203497 10c c cf f (s, MPa)
2 21.309663 10 * ' 0.3927659* ' 21.45c covert f f (s, MPa)
Además, en la práctica se toma overc = overt. En cuanto a la energía de fractura, existe información contradictoria en las investigaciones relacionadas, acerca de si ésta es dependiente de la velocidad de carga. Por ello, en este modelo se ofrece la posibilidad de modelar la energía de fractura independiente de la velocidad de carga (repow=0), o bien de incrementar la energía de fractura con la velocidad de carga multiplicando la energía de fractura estática por DAF (repow=1). La experiencia del autor del modelo es que se debe incrementar la energía de fractura con la velocidad de carga, por tanto el valor por defecto será repow=1. Este valor proporciona buena correlación con los datos experimentales para la mayoría de los problemas analizados y discutidos en el documento de evaluación de este modelo [Murray, 2007b].

Antecedentes
103
2.7.4. ENDURECIMIENTO MIXTO
Este tipo de comportamiento se modela con una superficie inicial de plastificación tipo NHFf que endurece hasta que coincide con la superficie de plastificación última (rotura) Ff. Para su definición se requieren 2 parámetros: NH (endurecimiento isótropo) establece el inicio del endurecimiento de forma que la superficie inicial de plastificación es una fracción de la superficie final. Los valores razonables para este parámetro son 0.7< NH <1. El segundo parámetro CH (endurecimiento cinemático) determina la velocidad de endurecimiento.
El estado variable que define el desplazamiento de la superficie de plastificación se denota como ij . El valor de cada componente de esta tensión
es nulo sobre la superficie inicial de plastificación y alcanza un valor máximo en la superficie de rotura. La tensión total se actualiza a través de la suma de la tensión inicial de plastificación ( KH
ij ) con la tensión ij . En el instante n+1
ij será:
1n nij ij ij
Y la tensión total actualizada en el instante n+1 será:
1 1 1P n KH n nij ij ij
La regla de endurecimiento define el crecimiento de ij . Este modelo
basa el endurecimiento en la tensión con lo que se asegura de que la superficie de fallo a cortante trasladada coincide con la superficie de rotura. Con ello se evita el problema común a los modelos que basan su endurecimiento en la deformación plástica, en los que la translación no resulta tan precisa. El crecimiento de ij se define como:
( )Pij H ij ijC G t

Capitulo 2
104
Donde HC es la velocidad de translación en compresión simple
(parámetro de entrada para el usuario), G es una función que limita los
incrementos y ( )Pij ij son las componentes de la tensión elastoplástica que
determinan la dirección de translación para cada componente. y t se calculan internamente por el programa y se incluyen en esta expresión para mantener el endurecimiento independiente del tiempo de paso, del factor de escala del tiempo de paso y del incremento de velocidad de deformación.
En tracción simple (y en cortante puro) la velocidad de translación se incrementa internamente por 10. Para estados tensionales con bajo confinamiento, la velocidad de translación está situada entre el valor en tracción y el valor en compresión, de forma que:
Si la presión es tensión ( 1 0J ) 10FragilH HC C
Si la presión es compresión ( 1 0J ) Ductil Fragil FragilH H H HC C trans C C
Donde 1
23 '
pwrcJtransJ
La función G restringe el movimiento de la superficie de plastificación
para que no pueda ir más allá de la superficie de rotura. La forma de la función G está determinada por la forma de la superficie de plastificación:
1 1
2
2 2 2 2 2
21
P PP
ijij ij
f c H f cJ J
SG
F F N F F
3
iiij ij

Antecedentes
105
Para la superficie de plastificación inicial 1G porque 0ij . En la
superficie de rotura el valor de la función limitante es 0G porque el
numerador iguala el denominador en la superficie de rotura. Por tanto G
limita el crecimiento de la tensión trasera mientras se alcanza la tensión de rotura. El desarrollador ha elegido elevar al cuadrado el paréntesis en base a la revisión del comportamiento de simulaciones con 1 sólo elemento. El exponente 2 se puede reemplazar por un valor introducido por el usuario en una fecha posterior.
Cada término del denominador justifica una descripción. El término a la izquierda es el valor de 2'J en la superficie de rotura, evaluada con el
invariante de tensión con tensión trasera (antes de la aplicación del daño y la viscoplasticidad). El término de la derecha es el valor de 2'J en la superficie
inicial de plastificación evaluada con el invariante de tensión sin tensión trasera (también antes de la aplicación del daño y la viscoplasticidad).
El endurecimiento isótropo modifica la definición de la superficie de cortante de forma que:
11 1exp J
f HF J N J
Si no se utiliza endurecimiento ( 0HC y 0HN ) entonces el valor de
HN se resetea internamente a 1 y la última superficie de plastificación se
recupera.
2.8. PROYECTILES
La elección del proyectil depende del tipo de análisis que se quiera realizar. En trabajos en los que se estudia el comportamiento del material frente a impacto, el punto de vista si sitúa en el material. Sobre este material se provoca un impacto con unas características dadas y a partir de ahí el

Capitulo 2
106
estudio se centra en el comportamiento del material sometido a esa acción. Por tanto, no resulta importante el estudio de la interacción entre el proyectil y el elemento que recibe el impacto ni el comportamiento del proyectil durante el impacto. Como consecuencia, frecuentemente se utilizan proyectiles rígidos en estos estudios [Park, 2001; Koh, 2001; Georgin, 2003]. Este punto de vista se ha utilizado también en el estudio de estructuras simples sometidas a impacto [Banthia, 1987; Eibl, 1987; CEB, 1998].
Por otra parte, en las estructuras civiles los impactos proceden habitualmente de vehículos, bien sean camiones, turismos o carretillas elevadoras. Para analizar correctamente este tipo de sucesos resulta imprescindible situar el punto de vista tanto en la estructura como en el vehículo y su interacción; por ello muchos autores utilizan como proyectil de estudio el vehículo que se prevé que pueda impactar contra la estructura [Atahan, 2006; Borovinsek, 2000; Itoh, 2006; Itoh, 1999; Sherif, 2005; Zheng, 2007].
No obstante, el estudio de impactos de vehículos contra estructuras se ha abordado tradicionalmente desde el punto de vista del vehículo y especialmente del ocupante. De estos estudios, los más conocidos por el público por su especial incidencia en la calidad y los precios de los coches son los estudios de impactos en vehículos a 60 km/h realizados por la “European New Car Assessment Programme” (NCAP) [NCAP, 2007]. La importancia de estos estudios es tal que, la puntuación obtenida por dichos vehículos en estos tests se ha convertido en un factor casi decisivo a la hora de adquirir un coche.
Sin embargo, aunque no implican riesgos vitales, las aseguradoras y los fabricantes de coches también se interesan por los efectos de los choques a bajas velocidades. Está documentado que el 80% de los daños en el cuello que necesitaron asistencia médica se deben a impactos a baja velocidad, es decir hasta 35 km/h [Tucker, 1995]. Así pues, resulta de gran interés el diseño sistemas pasivos de seguridad en los vehículos que minimicen los daños tanto para los ocupantes como para la estructura del vehículo. El principal de estos elementos es sin duda el parachoques. Estos elementos se diseñan de manera

Antecedentes
107
que absorban la mayor parte de energía sin transmitirla al resto del vehículo en impactos a baja velocidad. Por tanto, cualquier modelización de un choque de un vehículo a bajas velocidades deberá tener en cuenta, el efecto de dicho elemento o, en su defecto, un sistema que tenga su mismo comportamiento disipativo durante un impacto.
Los primeros intentos de modelización de un vehículo se realizaron a base de combinaciones de muelles. El primer modelo de este tipo que se ha encontrado se debe a Kamal [Mahmood, 2004] y fue realizada en 1970 (figura 2.26); desde entonces se ha evolucionado en la modelización de los vehículos, pasando de los modelos unidimensionales de Kamal, limitados en algunos aspectos a los modelos tridimensionales que se utilizan hoy en día y en los que se modelizan cada uno de los componentes estructurales del vehículo con una similitud asombrosa. Los modelos actuales más conocidos y utilizados son los creados por el “National Crash Analysis Center” (NCAC) [NCAC, 2007] (figura 2.27) utilizando el método de los elementos finitos. Estos modelos reflejan tanto la geometría como las características de cada uno de los materiales utilizados en las partes estructurales del vehículo y, además, se validan con los ensayos realizados por la NCAP, por lo que su fiabilidad es aceptada ampliamente [Atahan, 2006; Borovinsek, 2000; Itoh, 2006; Itoh, 1999; Sherif, 2005; Zheng, 2007].
Podría pensarse que para velocidades muy bajas las deformaciones que sufren los componentes del vehículo no superan el régimen elástico y no se transmiten más allá del sistema del parachoques; sin embargo existen evidencias de que incluso a una velocidad de 8 km/h el radiador resulta dañado (fig. 2.28) [Aguilera, 2006].

Capitulo 2
108
Fig. 2.26: Modelo inicial de Kamal, imagen obtenida de [Mahmood, 2004]
Fig. 2.27: Modelo de elementos finitos creado por NCAC [NCAC, 2007]

Antecedentes
109
Fig. 2.28: Radiador dañado en impacto a 8 km/h, imagen obtenida de [Aguilera, 2006]
Entre los organismos interesados en los estudios de impactos de vehículos a baja velocidad, el RCAR (Research Comittee for Automovile Repairs) es una organización internacional que trabaja en la reducción de los costes de los seguros mejorando la resistencia a la rotura o dañabilidad, la reparabilidad y seguridad de los vehículos. Este organismo se dedica especialmente al estudio de los daños producidos por impactos a baja velocidad. Para ello ha desarrollado un ensayo para impactos a baja velocidad similar a los que realiza la NCAP pero con una velocidad de 15 km/h [RCAR, 1999].
El estudio de la energía disipada por el parachoques no resulta evidente, debido, en primer lugar, a la dispersión de modelos y materiales entre los distintos fabricantes y, en segundo lugar, a la continua evolución de los componentes que se encuentran sometidos permanentemente a estudios de investigación con el fin de mejorar su comportamiento [Sharpe, 2004]. Esto provoca que la simulación de los efectos disipativos del parachoques mediante modelos reológicos simples sea, hoy en día, inabordable.
Por otra parte, el tipo de material y la longitud de los elementos disipativos del parachoques son cuestiones de estudio actualmente. La necesidad de disipar una mayor cantidad de energía en la zona del parachoques y disminuir con ello la deceleración de los pasajeros, hace necesaria una longitud mayor de las piezas absorbedoras de energía; sin embargo, esta longitud mayor implica un mayor volumen y por tanto mayor peso, cuando la tendencia actual es la de construir vehículos más ligeros. La forma de resolver esta cuestión es, en primer lugar la utilización de materiales de bajo peso como el aluminio, y en segundo lugar el estudio de la longitud necesaria para una correcta disipación de la energía. En este sentido, la asociación europea del aluminio ha estudiado la energía disipada por tubos de aluminio sometidos a impacto en condiciones de laboratorio; estos tubos tienen diferentes longitudes y espesores de chapa. El resultado es que, para la

Capitulo 2
110
misma absorción total de energía y en función del tipo de inestabilidad que se presente, cambian las características geométricas del elemento [EAA, 2004].
Como conclusión se puede decir que la representación matemática de un modelo válido para un vehículo durante un impacto, incluso a baja velocidad, es una cuestión muy compleja. La mejor solución existente en la actualidad y aceptada por los investigadores en este tema son los modelos de elementos finitos desarrollados por la NCAC [NCAC, 2007].
2.9. TRABAJOS EXPERIMENTALES
En general, los trabajos experimentales referentes a impactos sobre estructuras, son escasos. Las pocas referencias existentes se pueden agrupar en función del tipo de proyectil que se utiliza; es decir, si es rígido o no. Habitualmente se trata de proyectiles rígidos, ya que eliminan parámetros del problema de estudio; no obstante, en muchas ocasiones resulta necesario tener en cuenta la pérdida de energía que se produce en el proyectil durante el impacto y sus consecuencias en los resultados. Con el fin de tener en cuenta estas características del proyectil se han realizado también ensayos en los que el proyectil es deformable. En estos casos, conviene que la deformabilidad y el comportamiento en general del proyectil sean similares a los que se producirían en la situación real; de nada sirve estudiar el impacto de un objeto deformable que no es comparable a la realidad. Por ello, en el estudio de impactos provocados por vehículos, se han utilizado vehículos reales que han sido guiados para provocar su impacto en unas condiciones establecidas.
Por otra parte, en la industria del automóvil, existen ensayos normalizados de impacto de vehículos contra elementos rígidos con el fin de evaluar la seguridad de los vehículos. A partir de estos ensayos se pueden obtener algunos datos interesantes, pero, lamentablemente, las velocidades de estos ensayos no coinciden con las de este estudio en algunos casos y por

Antecedentes
111
otro lado, el objeto de estudio durante estos ensayos es el propio vehículo y no la estructura contra la que impacta, por lo que el ensayo tiene otro enfoque.
Entre los ensayos realizados con proyectiles rígidos [Park, 2001; Koh, 2001; Georgin, 2003; Banthia, 1987], destacan los de Eibl, ya que se adaptan bastante bien a las condiciones de estudio que se plantean en este trabajo. La descripción de los ensayos y sus resultados se encuentran tanto en el “Comité Euro-International du Beton” [CEB, 1998] como en la publicación [Eibl, 1987]. En estos documentos se detalla el ensayo realizado sobre varios pilares, de acero y de hormigón armado, que son sometidos a una carga en cabeza para simular las acciones transmitidas por el edificio o por la superestructura. El efecto de la gravedad se aplica mediante un pretensado del pilar. Sobre estos pilares se provoca un impacto utilizando la máquina que se muestra en la figura 2.29. Se trata de un tubo vertical por el que cae una masa que puede ser acelerada a través de aire comprimido. El impacto se aplica en el centro del vano del pilar.
Fig. 2.29: Ensayo realizado por Eibl para el estudio de pilares sometidos a compresión:
Compresión del pilar (izda.) y Equipo para realizar el impacto (dcha.). [Eibl, 1987] En general, los resultados mostraron que durante el impacto existe una
primera fase en la que la columna se mueve rápidamente separándose de la masa situada en la cabeza, de forma que esta masa no puede seguir al pilar en su movimiento con lo que la fuerza sobre la cabeza disminuye. Tras alcanzar la posición más deformada, el pilar recupera su posición inicial, con

Capitulo 2
112
lo que el punto de contacto en la cabeza invierte su sentido de movimiento, desplazándose hacia la masa, mientras que la masa está todavía desplazándose hacia el pilar. Como consecuencia, la fuerza sobre la cabeza aumenta por encima de su valor original. Esta descripción es válida para el caso de materiales perfectamente elásticos, por ejemplo, se ajusta perfectamente para un pilar metálico; no obstante, en los experimentos realizados con pilares de hormigón armado, se encontraron ciertas diferencias en la fuerza sobre la cabeza, especialmente en los instantes iniciales del impacto. Estas diferencias se deben a la fisuración de la sección, que provoca un aumento de la fuerza en el contacto en los instantes iniciales. En la figura 2.30 se muestran los resultados obtenidos por Eibl para un pilar de hormigón armado de sección cuadrada de 30x30 cm. Las curvas muestran la variación en el tiempo para la carga total en cabeza (F2) y para el desplazamiento en el punto de aplicación del impacto (punto medio, S1). El ensayo se realizó con una velocidad de 10.8 km/h y la masa del proyectil fue de 1.14 t. La masa del cuerpo que se colocó en la cabeza fue de 20 t y se pretensó el pilar para simular el efecto de la gravedad sobre esta masa.
Fig. 2.30: Resultados de uno de los ensayos realizado por Eibl sobre un pilar de hormigón
armado. La curva con trazo suave se corresponde con el desplazamiento del punto de aplicación del impacto, mientras que la otra muestra la evolución de la fuerza total aplicada en la cabeza
del pilar [CEB, 1998] En cuanto a los ensayos que utilizan vehículos, quizás el más conocido
sea el que realiza el “European New Car Assessment Programme” [NCAP, 2009]; éste es un programa de seguridad para automóviles apoyado por varios gobiernos europeos, muchos fabricantes de vehículos y organizaciones relacionadas con el sector de la automoción en todo el mundo. Este programa

Antecedentes
113
realiza pruebas de seguridad en automóviles nuevos entregando una clasificación basada en el comportamiento del automóvil en pruebas de impacto frontal y lateral. La prueba de impacto frontal se realiza contra un elemento rígido situado en el lado del conductor y con una anchura algo inferior a la mitad del vehículo; la velocidad en el momento del impacto es de 64 km/h. La prueba de impacto lateral estándar se realiza a 50 km/h contra una barrera móvil. Durante el ensayo se registran los datos de los acelerómetros situados en el vehículo y se graba el impacto con cámaras de alta velocidad. Desafortunadamente no se registran datos sobre las acciones que experimenta el elemento rígido, dado que el cuerpo de estudio es el propio vehículo y no la estructura contra la que impacta. No obstante, los datos recogidos en estos ensayos han sido utilizados para calibrar y comprobar la validez de modelos matemáticos de elementos finitos para automóviles. Estos modelos se desarrollan por la “Nacional Crash Análisis Center” (NCAC) [NCAC, 2007] y se ofrecen a los investigadores en el área con el fin de facilitar el estudio de las consecuencias de los impactos producidos por automóviles.
Algunos datos experimentales en cuanto a la fuerza en el contacto durante el choque se pueden encontrar en el CEB, para un vehículo tipo VW Jetta, un Mercedes 280 GE y un autobús, todos ellos impactando contra un muro rígido a una velocidad de 50 km/h (figura 2.31).
Por otra parte, el “Research Council for Automobile Repairs” (RCAR) [RCAR, 1999] realiza el mismo ensayo que la NCAC pero con una velocidad de 15 km/h. El objetivo de este ensayo es determinar las características de daño y capacidad de reparación para vehículos de motor en caso de una colisión a esa velocidad.

Capitulo 2
114
Fig. 2.31: Fuerza en el contacto en función del tiempo para un VW Jetta (izquierda), un Mercedes 280 GE y un autobús (derecha), a una velocidad de 50 km/h [CEB, 1998]
Fig. 2.32: Comparación entre el comportamiento entre ensayos a escala real (arriba) y simulaciones numéricas (abajo) [Borovinsek, 2000]
Otros experimentos realizados con automóviles reales en los que se
estudia el comportamiento del elemento que recibe el impacto y no del vehículo, son los relacionados con las barreras de protección de carretera. Entre ellos están los realizados por Borovinsek et al. [Borovinsek, 2000]. En este trabajo se hacen ensayos a escala real con camiones que impactan lateralmente contra barreras de contención metálicas situadas en carreteras. Los ensayos se realizaron siguiendo las indicaciones de la norma EN 1317 [EN 1317, 1998]. Estos ensayos se comparan con simulaciones numéricas con el fin de validar el modelo matemático (figura 2.32). Itoh [Itoh, 2006] utiliza los experimentos realizados por el Instituto de Investigación en Obra Civil de Japón [PWRI, 1998] en los que se estudia el impacto lateral de camiones contra barreras de contención de hormigón armado. Otros ensayos similares se pueden encontrar en [Coon, 1999; Mark, 1999].

Antecedentes
115
2.10. NECESIDAD DE UN ESTUDIO ALTERNATIVO
Los trabajos relacionados con este tema que se han realizado hasta la fecha y que han sido descritos en los apartados anteriores se pueden agrupar en estos grandes grupos:
Modelización del hormigón y determinación de los parámetros necesarios para esta modelización [Holmquist, 1993; Noble, 2005; Schwer, 2005; Malvar, 1997; Ottosen, 1977; Broadhouse, 1986; Broadhouse, 1987; Broadhouse, 1993; Liu, 2009; Koh, 2001].
En estos trabajos se busca la manera de modelizar matemáticamente el comportamiento del hormigón, generalmente a través de algoritmos implementados posteriormente en algún programa comercial de cálculo por elementos finitos. Los resultados obtenidos en estos trabajos constituyen un punto de apoyo en la comprensión y el dominio de los modelos que se elijan para representar el comportamiento del hormigón a través del método de los elementos finitos.
Estudio de la influencia de la velocidad de deformación en la resistencia del hormigón [Koh, 2001; Park, 2001; Malvar, 1998-a; Malvar, 1998-b; Malvar, 1998-c; Bischoff, 1991; Bischoff, 1995; De Borst, 1990; Brace, 1971; Brara, 1999; Calvetti, 2003; Camborde, 2000; Cundall, 1989; Donzé, 2001; Donzé, 2002; Ehlers, 2001; Gary, 1998; Gopalaratnam, 1996; Cotsovos, 2005; Cotsovos, 2008-a; Cotsovos, 2008-b; Cotsovos, 2008-c]
En estos trabajos se estudia el hormigón como material sometido a acciones dinámicas y, por tanto, son una parte fundamental en el desarrollo de los estudios sobre la modelización del hormigón que se han relatado en el punto anterior.
Estudio de un elemento estructural (generalmente un elemento longitudinal como un pilar o una viga) sometido al impacto de un

Capitulo 2
116
proyectil rígido [Eibl, 1987; Koh, 2001; Georgin, 2003; Banthia, 1987; CEB, 1998]
El punto de vista en estos trabajos se sitúa en la estructura, analizándose su comportamiento tras el impacto. Aunque son relativamente interesantes desde el punto de vista de este estudio, los diferentes condicionantes de los trabajos, como el punto de aplicación del impacto y sobretodo el uso de proyectiles rígidos, hace que no sean representativos de la situación que se pretende estudiar. Son útiles, sin embargo, para analizar el comportamiento estructural de algunos elementos sometidos a impacto en las condiciones en que se realizaron estos estudios.
Estudio del impacto sobre barreras de contención situadas en la carretera [Atahan, 2006; Borovinsek, 2000; Itoh, 2006; PWRI, 1998, Coon, 1999; Mark, 1999]
En estos trabajos se estudia el comportamiento de las barreras de protección sometidas al impacto de un vehículo real con un cierto ángulo de ataque. Son trabajos interesantes desde el punto de vista de que utilizan como proyectiles vehículos reales, bien a través de modelizaciones matemáticas realistas o bien en ensayos a escala real. Aparte de esta característica, el único punto en común con este estudio es la modelización del hormigón (cuando es este el material de la barrera analizada).
Estudio de la deformabilidad y modelización del vehículo sometido a impacto [RCAR, 1999; NCAP, 2009; NCAC, 2007; Aguilera, 2006; Mahmood, 2004]
El punto de vista en estos trabajos se sitúa en el vehículo y no en la estructura, por lo que, a pesar de que el proyectil en estos casos es un vehículo real, no se tienen en cuenta las consecuencias sobre la estructura. Su aplicación a este trabajo será la obtención de un modelo matemático basado en los elementos finitos para el vehículo completamente realista, además de

Antecedentes
117
la comprensión de algunos de los fenómenos que suceden en el vehículo durante el impacto contra la estructura.
Estudio del impacto sobre pilas de superestructuras viarias [Itoh, 1999; Sherif, 2005; Zheng, 2007]
La gran diferencia en la velocidad inicial del vehículo y en las características estructurales de las pilas consideradas, hace que estos trabajos no se puedan aplicar al que se está analizando. No obstante, se pueden extraer algunos datos interesantes, como por ejemplo el método de programación utilizado, el tipo de modelo utilizado para el hormigón o el proyectil utilizado. Estos datos se han incorporado a este estudio, tal como se ha descrito en esta memoria.
Gran parte de los trabajos teóricos se centran en el comportamiento del hormigón como material y no como estructura, y en los que se estudia el hormigón a partir de una estructura (similar a la que se estudia en este trabajo) no utilizan vehículos reales como proyectiles, con lo que el trabajo no es representativo para los fines que se pretenden determinar en este trabajo.
En cuanto a los trabajos experimentales, no se han hecho ensayos en los que se estudie el comportamiento de la estructura de edificación sometida a un impacto provocado por un vehículo real. En los trabajos experimentales realizados hasta el momento, o bien el proyectil es rígido, o no se estudian las consecuencias sobre la estructura, o el elemento que recibe el impacto no es una estructura de edificación si no una barrera de contención situada en la carretera.
Por tanto, no existen trabajos que abarquen todas las características del problema de estudio, ni teóricos ni experimentales, motivo por el que es necesario abordar este estudio.


119
CAPÍTULO 3. PRIMERA APROXIMACIÓN NUMÉRICA
3.1. INTRODUCCIÓN
La primera parte de este trabajo ha sido un análisis del problema desde el punto de vista teórico. Para ello se ha realizado un cálculo numérico a través del método de elementos finitos. A través de estos cálculos se obtiene la solución para una serie de simulaciones que representan situaciones estáticas y dinámicas. Para las simulaciones dinámicas se ha creado un modelo formado por un pilar rectangular de hormigón armado y un vehículo que, con una velocidad inicial establecida, impacta frontalmente contra él. Estas simulaciones dinámicas se han realizado con distintos valores para la velocidad inicial y la masa del vehículo, con el fin de obtener información sobre la sensibilidad de los resultados con la variación de estos parámetros. En las simulaciones estáticas se ha utilizado el mismo modelo para el pilar y se ha aplicado una carga estática horizontal, situada tal como se establece en el Eurocódigo 1 [EC1-1-7, 2003]. Con el fin de estudiar la situación más desfavorable, tanto el impacto como la carga estática se situaron en la dirección de menor inercia de la sección, tal como se muestra en la figura 3.1.
Fig. 3.1: Direcciones para el impacto, la carga estática aplicada y desplazamiento calculado
para comparación de simulaciones.

Capitulo 3
120
La carga estática equivalente correspondiente a cada caso se ha obtenido a través de la comparación entre las simulaciones estáticas y dinámicas. El parámetro de comparación utilizado ha sido el máximo desplazamiento del pilar.
Como datos de partida para este trabajo se ha elegido un pilar situado en el sótano de un edificio tipo. Este edificio está formado por 4 plantas de viviendas, una planta baja con una altura algo superior al resto y un sótano destinado a aparcamiento en el que se sitúa el pilar de estudio (figura 3.2). En total el edificio cuenta con 6 forjados unidireccionales, todos ellos de canto 32 cm; las luces de que dispone, tanto entre pilares como entre pórticos son de 8 m. La altura de los pilares de las viviendas es de 2.5 m, la altura de la planta baja es de 3.65 m y la altura de los pilares del sótano es de 2.75 m; con ello el edificio cuenta con una altura total de 18.32 m desde el sótano. Se trata de un edificio exento, con anchura de fachada de 32 m en todas sus caras, con lo que la superficie en planta es de 1024 m2.
Para este edificio se han calculado los valores de las acciones a que se encuentra sometido un pilar situado en el sótano. Con el fin de dimensionar la sección necesaria para el pilar, se han utilizado unos coeficientes de seguridad para las acciones de 1.35 para las acciones permanentes y de 1.5 para las variables, tal como se establece en la tabla 4.1 de la CTE [CTE, 2006].
Fig. 3.2: Esquema del edificio tipo elegido.

Primera aproximación numérica
121
A partir de estas acciones se ha tomado la combinación más desfavorable y se ha realizado el cálculo estructural de los pórticos del edificio con ayuda del programa informático SAP2000 [SAP2000, 2007]. Las acciones resultantes de este cálculo son un axil de 5012 kN y un momento de 5.25 kNm. A partir de estas acciones se ha diseñado la sección de hormigón armado que se ha utilizado en esta parte del trabajo y que se muestra en la figura 3.3 (izda.). Se trata de una sección de 60x40 cm, con un armado formado por 4 redondos de 16 mm de diámetro y 4 redondos de 12 mm. Los estribos están formados por barras de 8 mm de diámetro y se sitúan cada 15 cm. Los recubrimientos son de 5 cm en todos los casos. El hormigón elegido es un tipo HA-30/B/20/IIa y el acero de las armaduras es B-500-S. Además, con el fin de estudiar la situación más desfavorable, se ha tomado el caso en el que, por necesidades constructivas, el pilar se coloca de forma que el momento que le transmite la estructura se aplica en la dirección de menor inercia de la sección, tal como se muestra en la figura 3.3 (dcha.).
Fig. 3.3: Sección del pilar estudiado (izda.) y disposición constructiva en referencia a las cargas soportadas en el dimensionamiento estructural (dcha.).
Por otra parte, las acciones soportadas por el pilar se recalcularon con unos coeficientes distintos, correspondientes a situaciones accidentales, para su uso en cuanto al estudio del impacto. Estos coeficientes coinciden con la unidad, tanto para acciones permanentes como para variables, tal como se definen en la tabla 12.1 de la EHE-08 y la tabla 12.1 de la EAE. Con estos coeficientes, las acciones a tener en cuenta en el estudio del impacto, tal como

Capitulo 3
122
se ha planteado en esta parte del trabajo, son un axil de 3436 kN y un momento de 4.58 kNm.
3.2. MODELIZACIÓN TRIDIMENSIONAL
La modelización tridimensional del problema se ha realizado utilizando el método de los elementos finitos a través de programas comerciales diseñados para ello. En primer lugar se ha realizado un modelo estático en el que se ha incluido únicamente el pilar y se han aplicado cargas estáticas. Este modelo ha sido generado utilizando el programa comercial ANSYS [ANSYS, 2004]. A partir de este modelo se ha integrado el vehículo con el programa LSDYNA [LS-DYNA, 2003] y con ello se ha generado el modelo dinámico. Como preprocesador y postprocesador para el LSDYNA se ha utilizado el programa LSPREPOST [LS PREPOST, 2007].
3.2.1. MODELO PARA EL PILAR DE HORMIGÓN
Geometría
El volumen del hormigón se ha modelado con un bloque sólido de dimensiones 2.75 m de altura, 0.6 m de anchura y 0.4 m de profundidad.
En cuanto al armado se ha simulado de dos formas distintas en función del tipo de simulación a realizar (figura 3.4); estas dos maneras de simular el armado en el hormigón dan resultados muy similares, según estudios realizados en este campo [Barbosa, 1998]:
Armado disperso en la pieza y simulado mediante un volumen relativo de acero en la sección y la orientación del armado en los ejes coordenados. Esto se consigue gracias a la capacidad que posee el elemento finito utilizado en estas simulaciones. Este tipo de elemento se ha utilizado en las simulaciones estáticas realizadas con ANSYS.

Primera aproximación numérica
123
Barras de acero simuladas mediante elementos lineales colocados en la posición que ocupan en la pieza real. Esta modelización se ha utilizado en las simulaciones dinámicas realizadas con el programa LSDYNA.
Fig. 3.4: Geometría del pilar (izda.), detalle de la disposición del armado disperso en cada elemento (centro) y barras de armado mediante elementos lineales (dcha.)
Tipo de elemento utilizado
Se han utilizado diversos elementos para la modelización del hormigón en función del tipo de simulación realizada:
Para las simulaciones estáticas se ha utilizado el elemento SOLID65 [ANSYS, 2004] (figura 3.5) por ser el único que soporta el tipo de material “concrete” que se describe mas adelante y que es el que mejor se adapta a las características especiales del hormigón [Elyasian, 2006]; este elemento tiene la capacidad de fisurar bajo cargas tensionales y romper por aplastamiento bajo cargas de compresión.
Además, tal como se ha descrito más arriba, este tipo de elemento es capaz de simular el armado del hormigón sin necesidad de describir exhaustivamente la geometría de este armado; para ello se considera el armado repartido homogéneamente en la masa del material. En este caso, además de las características del hormigón, es necesario definir la orientación del armado, la cantidad del mismo y

Capitulo 3
124
sus características mecánicas. Por tanto no es necesario ningún elemento más para la modelización completa del pilar de hormigón.
Fig. 3.5: Geometría del elemento SOLID65 con los tipos posibles de mallado y orientación del armado disperso. Imágenes obtenidas de [ANSYS, 2004]
En el modelo utilizado en las simulaciones dinámicas realizadas con LSDYNA se ha utilizado el elemento tipo SOLID [LS-DYNA, 2003], formado por un hexaedro definido por 8 nodos con tres grados de libertad cada uno (figura 3.6).
Fig. 3.6: Geometría del elemento SOLID. Imagen obtenida de [LS-DYNA, 2003]
En este caso, tal como se ha indicado, se ha utilizado un armado localizado mediante elementos lineales. El elemento utilizado para el armado ha sido un elemento tipo BEAM Hugges-Liu. Se trata de un elemento lineal formado por dos nodos con tres grados de libertad en cada uno de ellos; además tiene la capacidad de reproducir grandes

Primera aproximación numérica
125
deformaciones, fluencia, plastificación y cambio en la rigidez del material debido a las tensiones existentes.
Procedimiento de mallado
El mallado consiste en la división del volumen en elementos conectados entre sí por nodos. Esta división se puede realizar manual o automáticamente; para grandes volúmenes es recomendable la segunda opción.
En el proceso de mallado se elige la forma del elemento en función de las posibilidades del tipo de elemento que se haya elegido. La forma y tamaño final de los elementos determina el grado de aproximación de la solución e incluso puede conducir a errores de forma que hagan inviable el cálculo de la simulación; esto ocurre con elementos que, debido a la geometría y a las deformaciones experimentadas en la pieza, han tomado formas excesivamente alargadas. Para determinar el grado de distorsión del elemento se utiliza el “aspect ratio” que es igual a 1 en elementos completamente regulares y aumenta conforme el elemento se distorsiona (figura 3.7).
Fig. 3.7: Tetraedro con elevada relación de aspecto y tetraedro con relación de aspecto igual a la unidad. Imágenes obtenidas de [COSMOS, 2007]
La forma de evitar este problema es realizar un mallado regular de la pieza. Para ello la pieza debe cumplir una serie de requisitos (figura 3.8):
El volumen debe estar formado por 6, 5 ó 4 áreas.

Capitulo 3
126
Las líneas opuestas deben tener el mismo número de divisiones
En función del tipo de elemento puede ser necesario que el número de divisiones sea par
Fig. 3.8: Condicionantes para el mallado regular en función del tipo de volumen a mallar. Imágenes obtenidas de [ANSYS, 2004]
La forma de los elementos elegidos para el hormigón es la hexaédrica y el tamaño elegido para las divisiones de las líneas es de 5 cm; en el caso de las simulaciones con refuerzo mediante elementos lineales (no distribuido), las divisiones de estos elementos lineales se ha establecido en el mismo tamaño que los elementos del hormigón, con el fin de hacer coincidentes los nodos de ambos elementos y evitar errores de cálculo en estos puntos.
Las líneas opuestas deben tener el mismo número de divisiones
Volumen tipo hexaedro
Volumen tipo prisma Volumen tipo tetraedro
Las líneas de los lados deben tener el mismo número de divisiones
Las líneas de las caras deben tener el mismo número de divisiones y debe ser un número par
El número de divisiones debe ser el mismo y un número par

Primera aproximación numérica
127
Una vez concluida la labor del mallado, el volumen del pilar de hormigón queda formado por un total de 5.280 elementos hexaédricos de lado 5 cm conectados entre sí por 6.552 nodos (figura 3.9).
Fig. 3.9: Vista del mallado resultante en el pilar
Condiciones de contorno:
Como condiciones de contorno se han impuesto restricciones de movimientos, tanto en la superficie superior del pilar como en la inferior. En la base del pilar simulamos un empotramiento imponiendo que tanto los desplazamientos como los giros de esta superficie en cualquier dirección sean nulos; con ello estamos suponiendo que el terreno y la cimentación son lo bastante rígidos como para impedir los movimientos verticales de cualquier punto de la base del pilar. En la cabeza del pilar permitiremos los movimientos verticales e impediremos los movimientos en su plano; con ello permitimos la compresión del hormigón debido a las cargas transmitidas por el edificio y el giro del nudo que forma la cabeza del pilar con las vigas de los pórticos laterales.

Capitulo 3
128
Materiales y criterios de plastificación:
La utilización de distintos programas para cada tipo de simulación realizada ha hecho necesario la utilización de tipos de materiales distintos, adaptados cada uno de ellos a las características de los elementos que el programa nos permita en cada tipo de simulación realizada. Se detallan a continuación las características de los materiales utilizados en función de las simulaciones realizadas.
En las simulaciones estáticas realizadas con ANSYS se ha elegido el material tipo “Concrete” con comportamiento no lineal (figura 3.10) para modelar el hormigón. Este material, que utiliza el criterio de plastificación de Willam and Warnke [Willam, 1975], supone un comportamiento elástico lineal hasta el punto de colapso en el que sucede el aplastamiento o la fisuración. Estos puntos están ligados a las cargas límite c y t .
Fig. 3.10: Superficie de plastificación en tres dimensiones y en el espacio de tensiones principales para el material “concrete”. Imagen obtenidas de [ANSYS, 2004]
En caso de rotura por aplastamiento, el material colapsa; si la rotura es por fisuración, la tensión de tracción se reduce prácticamente a 0 en esa dirección y en caso de que la fisura se cierre, la tensión de compresión se transmite. En cualquier caso, las propiedades del material que se ha simulado cambian y para tener en cuenta ese cambio se consideran unos

Primera aproximación numérica
129
coeficientes de transferencia c y t que definen los factores de reducción de
las cargas que inducen deslizamiento entre las caras de la fisura. Para definir este material son necesarias las siguientes constantes:
Resistencia a tracción simple: tf
Resistencia a compresión simple: cf
Resistencia a compresión biaxial: cbf
Estado tensional hidrostático ambiente: ah
Resistencia a compresión para un estado de compresión biaxial impuesto sobre el estado de tensión hidrostático definido anteriormente: 1f
Resistencia a compresión para un estado de compresión biaxial impuesto sobre el estado de tensión hidrostático definido anteriormente: 2f
Sin embargo, para estados tensionales en los que la parte hidrostática sea pequeña ( 3h cf ), como es nuestro caso, la superficie de
plastificación se puede definir a partir de los valores de tf y cf . Para ello se
utilizan los valores predefinidos:
1
2
1.21.451.725
cb c
c
c
f ff ff f
Esta aproximación es válida para componentes de tensión hidrostática baja, que es nuestro caso, por lo que se tomarán estos valores por defecto. Se ha utilizado una resistencia a compresión simple del hormigón de 30 MPa, con lo que, siguiendo las indicaciones del Eurocódigo 2 [EC-2-1-1, 2004] se ha tomado una resistencia a tracción simple de 2 MPa y un módulo elástico de 33000 MPa. Además se ha especificado una densidad de 2500 kg/m3 y un coeficiente de Poisson de 0.2.

Capitulo 3
130
Por otra parte, el armado se ha definido como repartido en la masa del hormigón y su cuantía se ha especificado como una relación volumétrica a través de las constantes reales del elemento. Además se indican los ángulos que forman las barras con los ejes coordenados para orientar las armaduras. Para las armaduras se puede definir un material propio distinto al de la matriz, lo que permite aproximarse al comportamiento real del acero en las armaduras. El material elegido para las armaduras ha sido uno elasto plástico con límite elástico de 500 MPa. Todos estos valores utilizados para definir el modelo material del hormigón y su armado se detallan en la tabla 3.1.
Tabla 3.1: Valores numéricos utilizados en los parámetros que definen el hormigón armado en las simulaciones estáticas realizadas con ANSYS
SIMULACIONES ESTÁTICAS (ANSYS) HORMIGÓN
Tipo elemento SOLID 65 Densidad (kg/m3) 2500 Módulo de elasticidad (MPa) 33000 Módulo de Poisson 0.2 Criterio de plasticidad Concrete
tf (MPa) 2
cf (MPa) 30
cbf (MPa) 36
1f (MPa) 43.5
2f (MPa) 51.75 ARMADO DISTRIBUIDO
Densidad (kg/m3) 7850 Módulo de elasticidad (MPa) 210000 Módulo de Poisson 0.3 Criterio de plasticidad Elasto plástico Límite elástico (MPa) 500 Relación volumétrica 0.005263 Orientación del armado ( , ) (0,0)
En las simulaciones dinámicas realizadas con LSDYNA, se han modelado de forma independiente el hormigón y el armado. Para ambos se ha elegido un material elasto plástico, con los mismos valores utilizados en las simulaciones estáticas. Los detalles para este caso se dan en la tabla 3.2.

Primera aproximación numérica
131
Tabla 3.2: Valores numéricos utilizados en los parámetros que definen el hormigón armado en las simulaciones dinámicas realizadas con LSDYNA
SIMULACIONES DINÁMICAS (LSDYNA) HORMIGÓN ARMADO EN BARRAS
Tipo elemento SOLID BEAM Hugges-Liu Densidad (kg/m3) 2500 7850 Módulo de elasticidad (MPa) 33000 210000 Módulo de Poisson 0.2 0.3 Criterio de plasticidad Elasto plástico Límite elástico (MPa) 30 500
3.2.2. SIMULACIONES REALIZADAS CON EL MODELO DEL PILAR
Cálculo estático con las cargas transmitidas por el edificio
Se ha realizado este cálculo como paso previo a las simulaciones estáticas en las que se aplicarán las cargas transmitidas por el edificio junto con una carga estática horizontal en el punto de impacto. De esta manera se realiza una comprobación previa del modelo basada en la comparación de la tensión normal en la dirección longitudinal del pilar obtenida a través del modelo de elementos finitos y la obtenida a través del modelo teórico del prisma mecánico.
La aplicación de la carga se ha realizado a través de una presión con valor variable a lo largo de la superficie, de forma que se superpongan los efectos de una presión uniforme (producida por un axil de 3436 kN) y un momento puro (de valor 4580 N·m), tal como se muestra en la figura 3.11. La expresión de la variación de la presión aplicada es la siguiente:
21431250 14013750 N/mq y
Fig. 3.11: Superposición de cargas en cabeza para la modelización

Capitulo 3
132
Tras la aplicación de esta carga la mayor parte del hormigón se encuentra sometido a una tensión normal en la dirección longitudinal del pilar de 13.4 MPa, que coincide con la esperada, por lo que el modelo queda validado. En una vista general de estas tensiones (figura 3.12) se observa que alrededor de los extremos del pilar las tensiones varían rápidamente y no se corresponden con los valores esperados. Estas tensiones están provocadas por las restricciones externas aplicadas en estos contornos. No obstante, abarcan una zona pequeña en comparación con la longitud total del pilar, por lo que no influyen en la tensión que presenta la mayor parte del pilar. Además, no se ha encontrado ningún punto de plastificación en el pilar.
Fig. 3.12: Tensiones normales en dirección longitudinal (N/m2)
Cálculo Modal
El análisis modal de la estructura ofrece información acerca del comportamiento de la misma al ser sometida a acciones dinámicas y en particular en cuanto a su amortiguación.

Primera aproximación numérica
133
Se ha realizado un cálculo modal con el modelo descrito en el apartado anterior. Para ello se ha eliminado la carga superficial transmitida por el edificio y se ha sometido al pilar a un cálculo modal en el que se han obtenido 10 modos de vibración. Cada uno de estos modos de vibración está ligado a un movimiento del pilar y tiene asociada una masa modal para cada uno de los posibles movimientos en las direcciones de los ejes coordenados. Los resultados obtenidos se muestran en la tabla 3.3.
Tabla 3.3: Resultados obtenidos del cálculo modal ORDEN FRECUENCIA (Hz) MASA MOVILIZADA (kg)
(en la dirección del impacto) % que supone del total
1 120.43 1211.63 73.43 2 166.94 0.369E-12 0 3 313.67 0.468E-07 0 4 343.02 0.656E-12 0 5 352.5 15.273 0.925 6 453.67 0.499E-09 0 7 655.76 186.504 11.3 8 688 0.994E-07 0 9 797.7 0.105E-10 0
10 939.14 0.169E-05 0 TOTAL 1413.41 85.66
En cada uno de estos modos el movimiento predominante tiene una dirección distinta y la masa movilizada en cada una de estas direcciones es un dato importante porque es una medida del error que se comete al despreciar los modos de vibración con frecuencias más altas. Este valor se utiliza frecuentemente en los cálculos sísmicos de las estructuras y se recoge en las normativas referentes a estos temas. Aunque en nuestro caso no resulta de aplicación tan directa, creemos que es un dato importante dado que el rango de frecuencias hallado se utilizará en la definición del amortiguamiento en los cálculos dinámicos.
Por ello se ha determinado para cada modo de vibración la masa movilizada en la dirección del impacto y el porcentaje que supone frente a la masa total del pilar de hormigón que es de 1650 kg. En nuestro caso, con los

Capitulo 3
134
10 modos de vibración considerados, se ha movilizado una masa de 1413.41 kg, lo que representa un 85.66% del total.
Cálculo con carga estática horizontal equivalente al impacto
En estas simulaciones se realiza un cálculo estático del pilar con la carga transmitida por la edificación y la carga estática equivalente al impacto con las condiciones que indica el Eurocódigo 1. Esta carga horizontal se aplicará sobre el eje débil del pilar, con el fin de quedar del lado de la seguridad ante un impacto fortuito. El objetivo de este cálculo es obtener un modelo estático a través del que podamos obtener el desplazamiento máximo del pilar correspondiente a cada una de las cargas horizontales aplicadas. Se describe el cálculo realizado con una carga horizontal de 50 kN; no obstante, se han realizado con este mismo modelo otras simulaciones con distintos valores para esta carga horizontal.
Las indicaciones dadas por el Eurocódigo 1 establecen que la estática equivalente se aplica en dirección horizontal sobre una superficie rectangular de 0.25 m de altura y la anchura total del elemento, por ser inferior a 1.5 m. El centro de esta zona cargada está situado a una altura de 0.5 m sobre el nivel del suelo. En la figura 3.13 se muestra esta área sombreada en el pilar. La carga se ha aplicado a través de una presión en la cara externa de los elementos situados en esta zona, con un valor de:
50000 0.33 0.6 0.25
P MPa

Primera aproximación numérica
135
Fig. 3.13: Zona de aplicación de la carga estática de 50 kN
El resultado obtenido, en cuanto a tensiones normales en la dirección del eje del pilar, es el que se muestra en la figura 3.14. El efecto producido por la carga introducida es el aumento de las tensiones en la zona de aplicación de la carga y hasta un valor de 15.2 MPa. En la base del pilar se crea un plano en el que la tensión máxima se encuentra en la cara opuesta al impacto y está comprendida en el intervalo 15.2 16.4 MPa, mientras que la tensión mínima en ese mismo plano se encuentra en la cara del impacto y está comprendida en el intervalo 12.7 13.9 MPa. No se han encontrado puntos plastificados en el pilar.

Capitulo 3
136
Fig. 3.14: Tensiones normales en la dirección longitudinal. Vista de la cara de aplicación de la
carga (arriba) y cara opuesta a la de aplicación de la carga (abajo)
En cuanto a los desplazamientos experimentados en la dirección perpendicular al impacto (figura 3.15), se observa el efecto producido por la expansión lateral del material debido a la carga vertical aplicada en la cabeza

Primera aproximación numérica
137
del pilar; es decir, estamos observando los efectos de Poisson en esa dirección del pilar.
Este efecto puede inducir a error en la medida del desplazamiento del pilar debido a la carga horizontal aplicada, ya que en la piel del pilar se suman los efectos debidos a la compresión provocada por la carga aplicada en la cabeza, con el desplazamiento debido a la carga horizontal. En la dirección del impacto (figura 3.16), además de la expansión del material provocada por la compresión del pilar, se dan efectos locales que provocan un mayor desplazamiento en la superficie de aplicación de la carga; estos efectos locales se mitigan en el interior de la pieza y resultan inapreciables en el eje de la misma. Con la medida del desplazamiento en el eje del pilar se evitan las distorsiones creadas por los efectos locales y por la expansión lateral del material sometido a cargas axiales.
Tomando únicamente los nodos situados en el eje del pilar se ha determinado el desplazamiento máximo en esta dirección; este desplazamiento ha sido de 0.0438 mm. Variando el valor de la fuerza horizontal aplicada se han obtenido los resultados que se muestran en la tabla 3.4.
Tabla 3.4: Valores de entrada y resultados obtenidos en cada simulación estática Carga aplicada (kN) Desplazamiento máximo (mm) Simulación “Estático 20” 20 0.017 Simulación “Estático 30” 30 0.026 Simulación “Estático 40” 40 0.035 Simulación “Estático 50” 50 0.044 Simulación “Estático 100” 100 0.083 Simulación “Estático 200” 200 0.167

Capitulo 3
138
Fig. 3.15: Desplazamiento en la dirección perpendicular al impacto (m)
Fig. 3.16: Desplazamiento en la dirección del impacto y en la superficie del pilar (m)

Primera aproximación numérica
139
3.2.3. MODELO PARA EL VEHÍCULO
En este trabajo se ha utilizado un modelo de elementos finitos que refleje fielmente el comportamiento de un vehículo real durante un impacto. Para ello se han utilizado los modelos desarrollados por la NCAC (National Crash Analysis Center), la FHWA (Federal Highway Admnistration) y la NHTSA (Nacional Highway Traffic Safety Administration) en coordinación con la Universidad George Washington (Virginia) [Finite, 2007]. Estos organismos, dedicados al estudio de la seguridad en los vehículos, desarrollan modelos tridimensionales de vehículos reales con alta fidelidad, tanto geométrica como material. Estos modelos están disponibles gratuitamente a través de internet con el fin de que los investigadores en el campo de la seguridad de los automóviles puedan utilizarlos, mejorarlos y aportar los resultados de sus estudios.
Las fases que se siguen para la realización del modelo son las siguientes [Ford, 2007]:
Colocar cinta adhesiva sobre el vehículo real a modo de cuadrícula.
Digitalizar cada componente utilizando una máquina de reconocimiento de coordenadas.
Desmontaje de las piezas que componen el vehículo.
Recopilación de datos de masas y espesores de chapa para cada elemento individual del vehículo.
Identificación de cada parte y conexión.
Cálculo de los centros de gravedad.
Realizar ensayos sobre los materiales de cada componente para determinar su resistencia.
Creación del mallado del vehículo en un lenguaje de programación.
Montaje de las piezas del vehículo, incluyendo puntos de soldadura, restricciones de sólido rígido, juntas, muelles y amortiguadores.

Capitulo 3
140
En la figura 3.17 puede verse una de las primeras fases del desarrollo del modelo matemático; los elementos no estructurales se han eliminado y el resto se somete a una discretización a tamaño real.
Fig. 3.17: Detalles de la discretización en un vehículo real. Imagen obtenida de [Ford, 2007]
Una vez realizado el modelo matemático se calibra mediante comparación entre las simulaciones realizadas con el mismo para unas condiciones de impacto determinadas y las observadas en vehículo real en ensayos controlados realizados para las mismas condiciones.
De entre los modelos de vehículos disponibles se ha elegido uno con relativamente pocos elementos y nodos, con el fin de agilizar los cálculos, que han sido realizados en un ordenador portátil convencional muy alejado de las capacidades de las estaciones de trabajo con que se trabaja en los centros de cálculo en que se desarrollan estos modelos.

Primera aproximación numérica
141
El modelo elegido para el trabajo que se desarrolla en este capítulo corresponde a un vehículo tipo Chevrolet pick-up fabricado entre los años 1973 y 1989 (figuras 3.18 y 3.19). El modelo ya está mallado y tiene todas las características de los materiales que lo componen. El modelo completo está formado por 66050 nodos y 57850 elementos.
Fig. 3.18: Superficies y volúmenes del modelo y mallado de los mismos
El modelo completo está formado 61 piezas entre las que se encuentran el parachoques, los largueros, el motor, el radiador, la cabina, la carrocería, las llantas y neumáticos, los cristales, amortiguadores y la suspensión. Entre los elementos empleados en el mallado de estos elementos se encuentran sólidos, cáscaras, vigas y muelles con amortiguamiento.
Fig. 3.19: Detalles de los principales elementos resistentes en un impacto: largueros,
parachoques y conjunto radiador del vehículo

Capitulo 3
142
La suma de las masas de los elementos que forman este modelo es de 1840 kg; no obstante, con el fin de analizar el efecto de la variación de la masa del vehículo en los resultados, se ha aumentado esta masa. Para ello, y aprovechando la caja de que dispone el vehículo en la parte posterior, se ha colocado un elemento en esta caja con la masa necesaria para alcanzar los 3000 kg que se indican como valor máximo en el CTE. Este elemento comparte cuatro de sus nodos con la caja del vehículo, con lo que los movimientos de ambos están ligados. El resultado de esta modificación se puede ver en la figura 3.20.
Fig. 3.20: Vista de la caja colocada en la parte trasera del vehículo
Con el fin de calibrar el modelo del vehículo, la Universidad George Washington realizó una simulación con las mismas condiciones exigidas por el ensayo NCAC [NCAC, 2007] y los resultados de esta simulación fueron comparados con el ensayo del vehículo real realizado por la NCAC en condiciones controladas.
Las condiciones de la prueba fueron las siguientes [Finite, 2007]:
Tipo de impacto: Vehículo contra muro controlado por células de carga en impacto frontal
Velocidad del impacto: 55.8 km/h
Ángulo del impacto: 0º
Superficie contra la que impacta: hormigón
Condiciones climatológicas del impacto: en seco

Primera aproximación numérica
143
Temperatura ambiente: 0º C
La simulación se realizó con el programa LS-DYNA, el mismo que se ha utilizado en las simulaciones dinámicas del trabajo que se presenta.
En la figura 3.21 se muestra la deformación final tanto en la simulación numérica como en el ensayo real para este modelo; se puede comprobar la similitud entre ellas, lo que da una idea de la similitud en el comportamiento de ambos vehículos.
Fig. 3.21: Deformaciones experimentadas por el vehículo en la simulación MEF (arriba) y las experimentadas en el ensayo realizado sobre el vehículo real. Imágenes obtenidas de [Finite,
2007]
Este mismo modelo de elementos finitos ha sido utilizado en otros trabajos de investigación relacionados con impactos de vehículos contra pilas de puentes o barreras separadoras en autovías [Itoh, 1999; Sherif, 2005; Zheng, 2007; Atahan, 2006; Borovinsek, 2000; Itoh, 2006].

Capitulo 3
144
Además, estos modelos se realizan en el código comercial LS DYNA, por lo que las simulaciones dinámicas, que se describen a partir de este punto, se han realizado utilizando este código. No obstante, tal como ha sido descrito anteriormente, se han utilizado los mismos valores para los parámetros que definen los materiales en ambos códigos.
3.2.4. SIMULACIONES DINÁMICAS REALIZADAS Y RESULTADOS
OBTENIDOS
Una vez incorporados en un mismo modelo el pilar y el vehículo, el modelo completo consta de 95395 elementos y 49062 nodos; el tiempo final de cálculo ha sido de 0.6 s, para lo que ha sido necesario invertir alrededor de 11 horas de tiempo computacional en un ordenador personal con procesador Intel Celeron de 1.6 Gb y 512 Gb de memoria Ram.
Las condiciones de contorno utilizadas en el pilar han sido las mismas que en las simulaciones estáticas. Las cargas aplicadas en la cabeza del pilar también coinciden con las aplicadas en las simulaciones estáticas, pero en este caso ha sido necesario tomar alguna precaución a la hora de realizar los cálculos.
Con el fin de evitar los efectos dinámicos de la carga estática situada en la cabeza del pilar y de la gravedad se ha realizado una simulación secuencial implícito-explícito. En la primera parte se ha realizado una relajación dinámica durante la que se aplica un amortiguamiento muy alto sobre el modelo con la carga de cabeza y la gravedad. Este cálculo finaliza cuando la energía cinética del modelo es inferior a un valor previamente establecido. Como resultado de este cálculo se obtienen los desplazamientos de todos los nodos del modelo. Estos valores se utilizarán como valores iniciales en el cálculo explícito, durante el que se provoca el impacto del vehículo contra el pilar.

Primera aproximación numérica
145
Con este modelo se han realizado distintas simulaciones variando la masa y la velocidad del vehículo; las combinaciones realizadas se detallan en la tabla 3.5.
Tabla 3.5: Valores utilizados para la masa y la velocidad del vehículo en cada una de las simulaciones dinámicas realizadas
VELOCIDAD (km/h) MASA (kg) Simulación nº 1 10 1800 Simulación nº 2 10 3000 Simulación nº 3 20 1800 Simulación nº 4 20 3000
Resultados obtenidos:
En general, los resultados que se obtienen tras una simulación dinámica dependen del tiempo y es necesario tener en cuenta esta variabilidad temporal a la hora de analizar los resultados con el fin de detectar el instante más desfavorable y trabajar con los resultados obtenidos para ese instante.
Para cada una de las simulaciones realizadas se han seleccionado las imágenes que muestran el estado general del vehículo tras el impacto, el desplazamiento en el pilar en la dirección del impacto y los puntos de plastificación del pilar.
Finalmente se analiza y se calcula la carga estática equivalente para cada una de las simulaciones los resultados obtenidos. Este análisis se ha realizado en base al desplazamiento máximo en el tiempo experimentado por el pilar a consecuencia del impacto. A través de este desplazamiento se ha obtenido la carga estática equivalente como la carga estática que produce ese desplazamiento máximo en el pilar. Para ello se ha iterado en las simulaciones estáticas variando la carga estática hasta conseguir el mismo valor de desplazamiento que el obtenido en la simulación dinámica correspondiente.

Capitulo 3
146
Simulación nº 1: Velocidad del vehículo: 10 km/h y masa 1800 kg
Dada la separación entre vehículo y pilar y la velocidad del vehículo, el contacto comienza en el instante 0.048 s y la aproximación del vehículo se mantiene hasta el instante 0.183 s, en que el vehículo comienza su retroceso debido al rebote; no obstante el contacto continúa hasta el instante 0.426 s. Por tanto podría decirse que el proceso de carga dura 0.135 s y el de descarga 0.243 s. El estado final del vehículo tras el impacto es el que se muestra en la figura 3.22.
Fig. 3.22: Estado del vehículo tras el impacto con velocidad 10 km/h y masa 1800 kg
Para el instante 0.183 s se han obtenido las imágenes de los desplazamientos experimentados por el pilar, tanto en la superficie del mismo como en su interior a través de las isosuperficies (figura 3.23), que son las superficies en las que todos los puntos tienen el mismo desplazamiento.
Fig. 3.23: Desplazamiento en la dirección del impacto (mm). Vista de la superficie del pilar
(derecha) e isosuperficies (izquierda). Impacto con velocidad 10 km/h y masa 1800 kg.

Primera aproximación numérica
147
Los desplazamientos son simétricos respecto al plano vertical que contiene la dirección del impacto, con una ligera desviación provocada por el impacto. El efecto que se aprecia en la parte inferior del pilar se debe a la acción de la gravedad que acentúa la expansión del material debido a la compresión del pilar.
Los puntos de plastificación del pilar (figura 3.24) coinciden con los que se obtienen en la simulación estática en la que únicamente se aplican las cargas transmitidas por la edificación, por lo que el impacto no ha producido nuevas zonas de plastificación en el pilar.
Para evaluar el desplazamiento máximo sufrido por el pilar, se analiza la evolución en el tiempo de esta variable; además, este desplazamiento varía en función de la altura en que esté situado el punto, por lo que se han tomado varios puntos a distintas alturas para detectar el punto en que se hace máximo.
Fig. 3.24: Puntos de plastificación. Impacto con velocidad 10 km/h y masa 1800 kg.
Por otro lado, con el fin de evitar las distorsiones en las medidas realizadas creadas por la compresión del pilar y por efectos locales en la zona de aplicación de la carga, se han tomado los puntos en el eje del pilar, tal como se muestra en la figura 3.25.

Capitulo 3
148
Fig. 3.25: Nodos del eje seleccionados para su análisis.
El desplazamiento máximo sufrido por los nodos seleccionados en la dirección del impacto (figura 3.26) es de 0.035 mm y se produce en el nodo nº 46049, situado a una altura de 1.15 m sobre la base del pilar; para producir este desplazamiento en ese punto del pilar la carga estática equivalente necesaria es de 40 kN.
Fig. 3.26: Desplazamiento en la dirección del impacto de los nodos seleccionados en función del
tiempo. Impacto con velocidad 10 km/h y masa 1800 kg.

Primera aproximación numérica
149
Simulación nº 2: Velocidad del vehículo: 10 km/h y masa 3000 kg
En este caso la separación entre el vehículo y el pilar es algo mayor que en el caso anterior, por lo que para la misma velocidad el contacto se inicia en el instante 0.06 s, algo posterior al caso anterior. La aproximación del vehículo se mantiene hasta el instante 0.234 s, en que el vehículo comienza su retroceso debido al rebote; no obstante el contacto continúa hasta el instante 0.441 s. Por tanto, en este caso el proceso de carga dura 0.174 s y el de descarga 0.207 s. El tiempo de carga es mayor que en el caso anterior y el de descarga menor, esta variación es consecuencia del cambio en la masa del vehículo. El estado general del vehículo tras el impacto es el que se muestra en la figura 3.27.
En la figura 3.28 se muestran los desplazamientos experimentados por el pilar en el instante en que son máximos, correspondiente a 0.20 s. Los comentarios realizados en la simulación anterior en cuando a los desplazamientos obtenidos son aplicables también en este caso. Como en los casos anteriores, no existen nuevos puntos de plastificación debido al impacto (figura 3.29).
Fig. 3.27: Estado del vehículo tras el impacto con velocidad 10 km/h y masa 3000 kg
Para la determinación del desplazamiento máximo en el eje del pilar se han tomado los mismos nodos del eje que en el caso anterior (figura 3.25), para los que se ha obtenido su desplazamiento en función del tiempo (figura 3.30).

Capitulo 3
150
Fig. 3.28: Desplazamiento en la dirección del impacto (mm). Vista de la superficie del pilar
(derecha) e isosuperficies (izquierda). Impacto con velocidad 10 km/h y masa 3000 kg.
Fig. 3.29: Puntos de plastificación. Impacto con velocidad 10 km/h y masa 3000 kg.

Primera aproximación numérica
151
Fig. 3.30: Desplazamiento en la dirección del impacto de los nodos seleccionados en función del
tiempo. Impacto con velocidad 10 km/h y masa 3000 kg. El desplazamiento máximo sufrido por los nodos seleccionados en la
dirección del impacto es de 0.035 mm y se produce en el nodo nº 46280, situado a una altura de 1.25 m sobre la base del pilar. Para producir ese desplazamiento en el mismo punto, la carga estática equivalente necesaria es de 40 kN.
Simulación nº 3: Velocidad del vehículo: 20 km/h y masa 1800 kg
Este modelo es el mismo que se ha utilizado en la simulación nº 1 pero con el doble de la velocidad inicial en el vehículo; por tanto, el tiempo transcurrido para el primer contacto es la mitad que en la simulación nº 1, es decir 0.024 s. La aproximación del vehículo se mantiene hasta el instante 0.138 s, en que el vehículo comienza su retroceso debido al rebote; no obstante el contacto continúa hasta el instante 0.192 s. Por tanto en este caso el proceso de carga dura 0.114 s y el de descarga 0.054 s. Ambos tiempos son menores que en las simulaciones anteriores, especialmente en el caso del tiempo de descarga; esto es debido al cambio en la velocidad.
El estado general del vehículo tras el impacto (figura 3.31) muestra unas deformaciones visiblemente superiores a las obtenidas en los casos

Capitulo 3
152
anteriores; con ello constatamos ya el efecto fundamental que ejerce la velocidad de la simulación en los resultados finales.
Fig. 3.31: Estado del vehículo tras el impacto con velocidad 20 km/h y masa 1800 kg
Para el instante 0.11 s se han obtenido las imágenes de los desplazamientos experimentados por el pilar (figura 3.32).
Fig. 3.32: Desplazamiento en la dirección del impacto (mm). Vista de la superficie del pilar
(derecha) e isosuperficies (izquierda). Impacto con velocidad 20 km/h y masa 1800 kg.
El desplazamiento en la dirección del impacto es significativamente superior a los obtenidos en los casos anteriores; además aparecen puntos singulares en la zona del impacto. No obstante, en este caso los puntos de

Primera aproximación numérica
153
plastificación no han variado respecto a las simulaciones anteriores (figura 3.33).
Fig. 3.33: Puntos de plastificación. Impacto con velocidad 20 km/h y masa 1800 kg.
El desplazamiento en función del tiempo para los nodos seleccionados del eje del pilar es el que se muestra en la figura 3.34.
Fig. 3.34: Desplazamiento en la dirección del impacto de los nodos seleccionados en función del
tiempo. Impacto con velocidad 20 km/h y masa 1800 kg.

Capitulo 3
154
El desplazamiento máximo sufrido por los nodos seleccionados en la dirección del impacto es de 0.171 mm y se produce en el nodo nº 53973, situado a una altura de 1.15 m sobre la base del pilar. Para producir este desplazamiento en ese punto del pilar la carga estática equivalente necesaria es de 204 kN.
Simulación nº 4: Velocidad del vehículo: 20 km/h y masa 3000 kg
Tal como ocurría en el caso anterior, este modelo es el mismo que se ha utilizado en las primeras simulaciones, en ese caso en la simulación nº 2, pero con el doble de la velocidad inicial en el vehículo; por tanto, el tiempo transcurrido para el primer contacto es la mitad que en la simulación nº 2, es decir 0.03 s.
En cuanto a la duración de la aproximación, en este caso no resulta tan sencillo de determinar como en los casos anteriores, ya que el vehículo presenta varios movimientos de acercamiento y alejamiento del pilar sin perder el contacto con él. Este efecto se puede ver claramente a través de la velocidad de algunos nodos del vehículo; para ello se ha seleccionado el primer nodo que impacta del vehículo (50115) y un nodo cualquiera del capó (59568), tal como se muestra en la figura 3.35 (dcha.). En el histórico de velocidades de estos nodos (figura 3.35 (izda.)) se observa, en primer lugar, que en el nodo 50115 la velocidad cae en picado incluso hasta valores negativos para el tiempo 0.03 s, como consecuencia del primer contacto tal como habíamos descrito anteriormente, posteriormente esta velocidad presenta rápidas variaciones que no permiten obtener conclusiones acerca del comportamiento del vehículo; sin embargo, para el nodo 59568 la variación de la velocidad del vehículo con el tiempo muestra claramente la alternancia de velocidades positivas y negativas con un régimen cíclico; esto significa que el rebote del vehículo no es único, sino que, probablemente debido a la masa que se colocó en la parte trasera y debido a las características especiales del vehículo utilizado por las que se le puede considerar como dos masas unidas por una

Primera aproximación numérica
155
articulación, se producen movimientos inerciales que provocan el acercamiento y alejamiento de las zonas del vehículo más alejadas del punto de impacto. Estos efectos son los que probablemente provocan las rápidas variaciones de velocidad en la zona del impacto.
Fig. 3.35: Nodos del capó seleccionados (dcha.) y variación de la velocidad con el tiempo para
estos nodos (izda.).
Durante el tiempo total de la simulación (0.6 s) no se produce la estabilización del movimiento del vehículo; sin embargo, en vista de los desplazamientos producidos en el pilar, cuyo máximo se centra en los primeros 0.2 s, hemos considerado suficiente este tiempo de simulación para la obtención de los datos necesarios para este estudio. Por tanto, no podemos dar en este caso tiempos de carga y descarga del pilar.
En cuanto al estado general del vehículo tras el impacto, presenta muchas similitudes con el obtenido en el caso anterior (figura 3.36).
Fig. 3.36: Estado del vehículo tras el impacto con velocidad 20 km/h y masa 3000 kg

Capitulo 3
156
Se muestran a continuación los desplazamientos experimentados por el pilar para el instante 0.12 de la simulación (figuras 3.37), en el que se producen los máximos desplazamientos en la dirección del impacto.
Fig. 3.37: Desplazamiento en la dirección del impacto (mm). Vista de la superficie del pilar.
Impacto con velocidad 20 km/h y masa 3000 kg. Por otra parte, los puntos de plastificación (figura 3.38) sí se han visto
modificados en este caso, tal como muestra la imagen. Se han formado dos zonas aproximadamente circulares y situadas en las aristas de la zona del impacto en las que las deformaciones experimentadas superan las máximas admisibles por el material en régimen elástico. Estas serían las zonas que probablemente se desprenderían del pilar.
Fig. 3.38: Puntos de plastificación. Impacto con velocidad 20 km/h y masa 3000 kg.

Primera aproximación numérica
157
El desplazamiento en función del tiempo para los nodos seleccionados del eje del pilar es el que se muestra en la figura 3.39.
Fig. 3.39: Desplazamiento en la dirección del impacto de los nodos seleccionados en función del
tiempo. Impacto con velocidad 20 km/h y masa 3000 kg.
Los resultados han sido muy similares al caso anterior pero con más vibración del pilar; esta vibración es debida, en parte, a la alternancia entre velocidades positivas y negativas que se da en el vehículo durante el tiempo de contacto entre pilar y vehículo, tal como se ha descrito en el inicio de esta simulación.
Con el fin de resumir los resultados obtenidos, en la tabla 3.6 se incluyen los resultados obtenidos en cada una de las simulaciones dinámicas realizadas, incluyendo los valores de carga estática equivalente obtenidos por comparación con simulaciones estáticas; además, se indican los datos básicos de estas simulaciones.
Tabla 3.6: Valores de entrada y resultados obtenidos en cada simulación dinámica (Pilar de Hormigón) VELOCIDAD
(km/h) MASA
(kg) Desplazamiento
máximo (mm)
Carga estática equivalente
(kN) Simulación nº 1 10 1800 0.035 40 Simulación nº 2 10 3000 0.035 40 Simulación nº 3 20 1800 0.171 204 Simulación nº 4 20 3000 0.162 192

Capitulo 3
158
Analizando el problema de forma unidimensional, como un prisma mecánico, encontramos que la menor carga horizontal para la que fisura el hormigón es de 662.52 kN, mientras que la menor para que aplaste es de 717.7 kN. Tanto la fisuración como el aplastamiento estarían situados en la sección del empotramiento, que es la más desfavorable. Los valores obtenidos para cualquier velocidad son muy inferiores a estas cargas mínimas, por lo que se justifica que no aparezca daño en el pilar en ninguna simulación.
Si comparamos las cargas estáticas equivalentes obtenidas en este trabajo (tabla 3.6) y las que se recomiendan en la normativa analizada en el capítulo 1 de esta memoria (tabla 1.1), resulta claro que los valores obtenidos para una velocidad de 20 km/h son superiores a los dados por cualquier norma. En particular, los valores dados por el CTE, DIN 1055-9 y partes 1.7 y 2.7 del Eurocódigo 1 son muy inferiores a los obtenidos en este trabajo para un impacto con velocidad mayor a 10 km/h. Sin embargo, los valores dados por el Anexo C de la Parte 1.7 del Eurocódigo 1 son más cercanos a los obtenidos en este trabajo para cualquier velocidad, a pesar de que siguen siendo inferiores. El aumento de la masa del vehículo no ha influido significativamente en los resultados obtenidos.
Este mismo procedimiento se ha seguido con un pilar metálico. Una vez realizado el dimensionamiento para soportar un axil de 5012 kN y un momento de 5.25 kN·m, resultó que el perfil óptimo es un HEB-450 con acero tipo S-275. Con esta sección se ha realizado un modelo de elementos finitos, utilizando elementos tipo SOLID45 en ANSYS y SOLID en LSDYNA. El mallado se ha diseñado de forma que fuera regular y que los elementos de menor espesor tuvieran al menos 2 elementos, tal como se muestra en la figura 3.40. Una vez mallado, el pilar metálico tiene 54226 elementos y 70895 nodos.
El material elegido en este caso es elasto plástico, tanto para las simulaciones en ANSYS como en LSDYNA. En ambos códigos se han utilizado los mismos valores para los parámetros que definen el material;

Primera aproximación numérica
159
módulo de elasticidad de 210000 MPa, coeficiente de Poisson de 0.3, densidad de 7850 kg/m3 y límite elástico de 275 MPa.
Fig. 3.40: Detalle del mallado resultante en el pilar metálico.
Sobre este pilar se ha aplicado la carga transmitida por el edificio, con los coeficientes correspondientes a las acciones accidentales, correspondientes a un axil de 3436 kN y un momento de 4.58 kN·m y se han realizado los mismos cálculos que se han descrito para el pilar de hormigón. Tras la comparación entre simulaciones estáticas y dinámicas, las cargas estáticas equivalentes son las que se detallan en la tabla 3.7.
Tabla 3.7: Valores de entrada y resultados obtenidos en cada simulación dinámica (Pilar Metálico) VELOCIDAD
(km/h) MASA
(kg) Desplazamiento
máximo (mm)
Carga estática equivalente
(kN) Simulación nº 1 10 1800 0.35 29 Simulación nº 2 10 3000 0.4 32 Simulación nº 3 20 1800 1.6 105 Simulación nº 4 20 3000 1.4 114
Tampoco en este caso se han encontrado zonas suficientemente grandes plastificadas tras los impactos o como consecuencia de la carga estática aplicada. Además, tras un análisis del problema como prisma mecánico, se determina que la carga mínima para que la primera fibra del pilar plastifique es de 217.64 kN, bastante superior a cualquiera de las obtenidas, lo que justifica los resultados.

Capitulo 3
160
Las cargas estáticas equivalentes obtenidas para el pilar metálico (tabla 3.7) muestran similitud con el caso del pilar de hormigón, aunque con valores más pequeños. Como en aquél caso, los valores obtenidos para 20 km/h son superiores a los dados por el CTE y por las partes 1.7 y 2.7 del Eurocódigo 1 (tabla 1.1), por lo que estas normas no dan valores seguros para este tipo de impactos. No obstante, en este caso, los valores indicados en la norma DIN 1055-9 y en los Anexos A y C de las partes 2.7 y 1.7 respectivamente del Eurocódigo 1 (tabla 1.1) son superiores a los obtenidos en este trabajo para cualquier velocidad, por lo que las indicaciones dadas en estas normas están del lado de la seguridad en este caso.
3.3. CONCLUSIONES Y REPLANTEAMIENTO DEL PROBLEMA
El estudio de la normativa relacionada con impactos horizontales sobre estructuras ha puesto de manifiesto la gran dispersión existente entre las indicaciones dadas por cada una de ellas; esta dispersión resulta evidente cuando se analizan las cargas estáticas equivalentes para un mismo impacto que resultan tras la aplicación de cada una de estas normas. Por otra parte, y a partir de unos modelos numéricos, se ha demostrado que algunas de las indicaciones dadas en estas normativas no resultan seguras para determinadas velocidades de impacto. En concreto, los resultados de las simulaciones previas muestran que:
La carga estática equivalente propuesta por el CTE se ajusta a la obtenida en los análisis dinámicos para una velocidad del impacto de 10 km/h, sin embargo resulta muy insuficiente para representar un impacto a 20 km/h, siendo en este caso la carga estática equivalente recomendada de aproximadamente 200 kN para el pilar de hormigón y 110 kN para el pilar metálico.

Primera aproximación numérica
161
Las indicaciones dadas en las partes 1.7 y 2.7 del Eurocódigo 1 son similares a las dadas en el CTE y, por tanto, se ajustan a la carga obtenida en este estudio para un impacto de 10 km/h, siendo insuficientes para un impacto a 20 km/h. No obstante, los Anexos A y C de las partes 2.7 y 1.7 del Eurocódigo 1, respectivamente, se ajustan mejor a estos resultados, aunque también son inferiores a los valores obtenidos en el caso del pilar de hormigón.
El valor dado por la norma DIN 1055-9 es del orden de los obtenidos para una velocidad de 20 km/h en el caso del pilar metálico; sin embargo, es inferior al obtenido para esa velocidad en el caso del pilar de hormigón.
La variación en la masa del vehículo no ha tenido gran repercusión en los resultados.
Para una velocidad de 20 km/h el impacto es lo suficientemente severo como para provocar deformaciones permanentes considerables en el vehículo, lo que ratifica la importancia de las características disipadoras de energía del vehículo y la necesidad de la utilización de un vehículo similar a los reales. Además, deberá ser tenida en cuenta esta severidad en el impacto a la hora de diseñar el ensayo que se pretende realizar, con el fin de garantizar la seguridad del personal durante la realización de los ensayos.
Por tanto, queda probado que, al menos teóricamente, la carga estática necesaria para representar un impacto provocado por un vehículo contra un pilar de edificación puede ser muy superior a las indicadas en algunas normas. Además, se trata de un estudio que no ha sido abordado hasta el momento desde el punto de vista de la baja velocidad, que es el que afecta a las estructuras de edificación.

Capitulo 3
162
Consecuentemente, resulta relevante la determinación de cargas estáticas que resulten realmente equivalentes a los impactos que pretenden representar, considerando los impactos debidos a vehículos contra estructuras de edificación. Para ello se propone el desarrollo de una parte experimental a través de la que se corroboren los resultados obtenidos en esta primera parte numérica. Dada la gran importancia de las características disipadoras de energía del vehículo durante el impacto, en esta parte experimental será necesario utilizar vehículos reales como proyectiles. El impacto se realizará contra pilares de hormigón armado dado que han sido los que han dado cargas estáticas equivalente más altas, según el análisis numérico previo que se ha realizado. Además, el hormigón es un material más complejo y desconocido que el acero, por lo que el estudio de su comportamiento bajo cargas impulsivas resulta más interesante.
Los impactos sobre los pilares de hormigón se realizarán en la dirección de su eje débil, tal como se ha hecho en las simulaciones numéricas. No obstante, se ha elegido una sección diferente del pilar para esta segunda fase del estudio. Este cambio obedece a la búsqueda de la situación más desfavorable para el pilar; esta situación es aquella en la que tanto la compresión transmitida por el edificio como la sección del pilar sean las mínimas posibles, ya que con ello el desplazamiento será mayor y además, el pilar estará en peores condiciones para soportarlo.
Siguiendo estos criterios se ha tomado el caso de un pilar perteneciente a un aparcamiento situado bajo una vía urbana. En este caso, la carga transmitida al pilar consiste en un axil de 700 kN y se desprecia el momento dada la escasa influencia que ha tenido en el caso previo. Con ello, la sección de 25x35 cm con el armado que se muestra en la figura 3.46 y un hormigón tipo HA-25/B/20/IIa cumple las necesidades estructurales. La altura del pilar será de 2.75 m.

Primera aproximación numérica
163
Fig. 3.46: Sección transversal del pilar de ensayo (dimensiones en mm).
Una vez realizado el ensayo se programará un nuevo modelo matemático con esta sección y con el resto de condiciones de los ensayos. Utilizando las medidas tomadas en los ensayos se ajustará el modelo de forma que tenga el comportamiento del pilar observado en los ensayos. En este nuevo modelo se utilizará un material para el hormigón que refleje sus características particulares, tal como se ha descrito en el Capítulo 2 de esta memoria. Hasta este momento se ha utilizado un material elasto plástico para modelizar el hormigón en las simulaciones dinámicas con el fin de simplificar el problema, dado que se trataba de un análisis previo del problema. No obstante, para las simulaciones definitivas, en las que se pretende un refinamiento mucho mayor de los resultados, sí será necesario utilizar el modelo material que mejor refleje las características del hormigón armado.
Por otra parte, dado que los modelos materiales de que disponen los códigos ANSYS y LS DYNA para reflejar el comportamiento del hormigón tienen diferentes características, en estas nuevas simulaciones se ha utilizado únicamente el programa LS DYNA, con lo que ambos modelos, estáticos y dinámicos, utilizan el mismo modelo material y por tanto la comparación entre sus resultados resulta más coherente.


165
CAPÍTULO 4. PARTE EXPERIMENTAL A ESCALA REAL
4.1. INTRODUCCIÓN
Con el fin de corroborar el análisis numérico realizado hasta el momento, se planteó la necesidad de desarrollar la parte experimental de este trabajo. No obstante, dado el comportamiento complejo del vehículo durante el choque, la única forma de realizar un experimento cuyos resultados se asemejen a la realidad es utilizando un vehículo real y, por supuesto, un pilar a escala real. No obstante, el diseño de estos experimentos a escala real comporta una serie de dificultades que fue necesario resolver.
Las necesidades a cubrir en esta parte experimental son varias. En primer lugar es necesario disponer de un espécimen para el ensayo, es decir, un pilar, de acuerdo a las necesidades y a las indicaciones que se han dado hasta aquí. En segundo lugar es necesario que ese pilar tenga unas coacciones al movimiento lo más semejantes a la realidad. Y por último, es necesario aplicar las acciones a que se ve sometido el pilar en su situación original, según los cálculos que se han hecho anteriormente. Para solucionar esto se diseñó un bastidor con el que, por una parte, se imponen las coacciones al movimiento necesarias y, por otra, se aplican las cargas correspondientes en la cabeza del pilar. Es necesario remarcar en este punto que la coacción al movimiento propia de un pilar de edificación, únicamente se conseguiría utilizando un pilar real de un edificio real. Desgraciadamente, es muy difícil encontrar una edificación con los pilares en buen estado, que sea

Capitulo 4
166
representativo del trabajo que se quiere desarrollar, que esté situado de manera que sea factible colocar el vehículo en la posición necesaria y que además pueda alcanzar la velocidad requerida antes del impacto y, lo que es más difícil, que esta edificación sea prestada para los fines que se proponen en este estudio. Por tanto, fue necesario encontrar una solución de compromiso con la que reproducir en el ensayo de la manera más fiel posible las condiciones reales a las que se encuentra sometido el pilar en la edificación. No obstante, las nuevas simulaciones se realizaron siguiendo fielmente las condiciones en que se desarrollaron los ensayos, con el fin de disponer de una herramienta con la que predecir fielmente el comportamiento del pilar para distintos valores de la velocidad y masa del vehículo.
Por otra parte, el vehículo tiene que tener una velocidad dada en el momento del impacto. Tal como se ha visto en las simulaciones presentadas en los resultados previos, el estado final del coche desaconseja el empleo de un conductor, dada la posibilidad de lesión del mismo. Para solucionar este problema, se diseñó una rampa con la longitud y pendiente suficientes para darle al vehículo la velocidad necesaria al final de la misma.
En los siguientes apartados se da una descripción completa tanto del bastidor de pruebas como de la rampa utilizados en esta parte experimental.
4.2. BASTIDOR DE PRUEBAS
En el proyecto del bastidor de pruebas se buscó el diseño de una estructura que fuera autoportante, es decir, en la que la carga de compresión a aplicar se transmitiera y fuera absorbida por la propia estructura, de forma que el terreno en el que se asentara únicamente tuviera que soportar el peso propio de la estructura y del pilar, pero no la reacción debida a la carga de compresión a aplicar sobre el pilar. Para ello se diseña una estructura que albergue en su interior al pilar y que, a través de la tensión de unos elementos y de la flexión de otros, transmita una compresión al pilar. Los

Parte experimental a escala real
167
elementos de que se compone el bastidor de pruebas son una cimentación, cuatro anclajes metálicos a esta cimentación, cuatro barras de tesado y un cabezal. La disposición de estos elementos se muestra en la figura 4.1:
Fig. 4.1: Elementos que forman el bastidor de pruebas
La disposición de las patas estuvo condicionada por varios motivos. En
primer lugar era necesario que, al menos en uno de los lados, fuera capaz de albergar al vehículo de ensayo evitando el contacto con las barras de tesado. Para ello, a una altura de 80 cm, la separación entre las barras de tesado en ese lado debía ser de 2.4 m. En segundo lugar se buscó que las dimensiones de la zapata fueran las mínimas necesarias, con el fin de evitar sobrecostes innecesarios en la ejecución del bastidor de pruebas. Con todo ello, las dimensiones del bastidor son las que se muestran en la figura 4.2.
El cabezal fue diseñado para recibir la carga de las barras de tesado y transmitirla a la cabeza del pilar. Se fabricó con chapa metálica de 30 mm de espesor. Está formado por dos estructuras en cajón cruzadas. Las esquinas de estas estructuras se utilizan para albergar el extremo de la barra tensora, así como el gato y los demás elementos necesarios para el tesado de la barra. Estas dos estructuras se apoyan en una base con los laterales rigidizados y con algunos rebajes para permitir el paso de las barras tensoras. En la figura 4.3 (dcha.) se muestran de forma separada cada una de estas estructuras y la

Capitulo 4
168
base en la que se apoyan. En las figuras 4.4 se dan los detalles geométricos de todas las piezas que forman el cabezal y en la figura 4.3 (izda.) se muestra una imagen del cabezal una vez finalizado.
Fig. 4.2: Croquis del bastidor de pruebas (dimensiones en mm).
Fig. 4.3: Partes del cabezal (dcha.), Imagen del cabezal finalizado (lateral y superior con las
barras y tuercas de tesado) (izda.)

Parte experimental a escala real
169
Fig. 4.4: Detalles geométricos del cabezal (dimensiones en mm)
Para evitar desplazamientos horizontales relativos entre el cabezal y el
pilar en el momento del impacto, se realizó una perforación en el centro de la base del cabezal, por la que se inserta una barra previamente alojada en la parte superior del pilar para este fin. En la holgura final entre esta barra y la perforación se colocan unas cuñas metálicas, para finalizar la sujeción del cabezal al pilar (figura 4.5). Además, entre el cabezal y el pilar se colocó una base de madera con el fin de facilitar el contacto entre todos los puntos de ambas superficies.
Fig. 4.5: Detalle del pasador insertado en el agujero central de la base del cabezal, antes y
después de la colocación de las cuñas.

Capitulo 4
170
Las patas de anclaje se encargan de transmitir la tracción a la zapata.
Se fabricaron con chapa metálica de 30 mm de espesor. En la parte superior de cada una de ellas se sitúa la caja para el alojamiento de la barra de tesado con placa de asiento y tuerca. La longitud de las patas permite que la parte inferior de las mismas, una vez situadas en su ubicación definitiva, alcance la base de la cimentación. Además, la zona que se sitúa por encima de la cimentación es la necesaria para colocar de forma segura y cómoda la placa de asiento y la tuerca necesarias. En la parte inferior se realizaron unos agujeros con el fin de colocar unas barras de cierre que eviten el deslizamiento de la pata dentro del hormigón, atando ésta al armado de la cimentación, tal como se muestra en las Figuras 4.6 y 4.7.
Fig. 4.6 Despiece de las patas (dcha.), Imagen de una de las patas (izda.)

Parte experimental a escala real
171
Fig. 4.7 Detalles de las patas: Alojamiento de la barra de tesado, placa de asiento y tuerca, en la parte superior de la pata (dcha.) y barras de cierre solidarizando la parte inferior de la pata
a la armadura de la cimentación (izda.)
La cimentación de hormigón armado se diseñó con forma de aspa, con el
fin de optimizar tanto el las necesidades de espacio como el coste de la obra. Por tanto, la cimentación está formada por 2 vigas cruzadas con canto variable (fig 4.8). La anchura de estas vigas es de 60 cm y la profundidad varía entre 70 cm en los extremos y 1 m en la zona central, tal como se aprecia en la figura 4.9. El hormigón utilizado fue tipo HA-30/B/20/IIa y como encofrado se utilizó el propio terreno.
Fig. 4.8: Vista tridimensional de la cimentación formada por 2 vigas cruzadas de canto variable

Capitulo 4
172
Fig. 4.9: Definición geométrica de la cimentación. Planta completa y alzado de una de las vigas que la forman (dimensiones en mm).
Fig. 4.10: Armado de las vigas de la cimentación y disposición de las patas de anclaje en ellas (dimensiones en mm).

Parte experimental a escala real
173
Fig. 4.11: Sección AA’ (dimensiones en mm).
Además, en la parte central de la cimentación se colocó una placa de
anclaje destinada al alojamiento de los pilares de ensayo. Esta placa de anclaje cuenta con 6 pernos roscados que quedan fuera del hormigón de la zapata y encajan en los taladros con que cuenta la placa situada en la parte inferior del pilar de ensayo. De esta forma se permitirá el cambio de espécimen sin necesidad de modificar la cimentación. En la figura 4.12 se muestra el detalle de esta placa situada en la cimentación y en la figura 4.13 se muestra el armado completo de la cimentación, con las patas de anclaje y la placa central, preparado para recibir el hormigón.

Capitulo 4
174
Fig. 4.12: Placa colocada en el centro de la cimentación para permitir el intercambio de espécimen de ensayo
Para la ejecución de la obra se realizó en primer lugar la excavación
necesaria para el alojamiento de la cimentación y se vertió el hormigón de limpieza. Dada la densidad del armado necesario, se decidió montar la armadura completa, incluyendo las patas de anclaje y la placa de cimentación, en un lugar apartado, fuera de la excavación. Una vez realizado el montaje completo, se levantó con la ayuda de una grúa y se colocó en la excavación para su hormigonado. Estas dos fases se pueden ver en la figura 4.13.

Parte experimental a escala real
175
Fig. 4.13: Armado de la cimentación de la zapata, con las patas colocadas en su posición dentro del armado, antes (derecha) y después (izquierda) de su colocación en la excavación preparada
para el hormigonado
Finalmente, el bastidor ejecutado y montado con el pilar de ensayo se
muestra en la figura 4.14.
Fig. 4.14: Vista frontal final del bastidor de pruebas, una vez colocado el pilar y realizadas las operaciones de tesado.

Capitulo 4
176
4.3. DOTACIÓN DE VELOCIDAD Y DIRECCIÓN EN EL VEHÍCULO
Tras las simulaciones matemáticas realizadas en los trabajos previos, se comprobó que podría resultar peligroso que hubiera una persona dentro del vehículo durante el impacto, dado el estado final del vehículo tras el impacto en estas simulaciones. Sin embargo, la ausencia de conductor planteó dos problemas que hubo que resolver.
En primer lugar el vehículo debía llevar una velocidad específica en el momento del impacto. Con el fin de resolver este problema se realizó una rampa con una longitud de 30 m y una pendiente del 8%. Esta rampa se realizó aprovechando el desnivel natural existente en un terreno de la Universidad que se cedió para este fin. El movimiento de tierras necesario y la pavimentación de la rampa se realizaron en base a un acuerdo con la empresa constructora PAVASAL. Como acabado de la rampa se realizó una solera de 20 cm de hormigón tipo HA-20/B/20/IIa en la que se dejó embebido un mallazo de 20x20x8 mm. Este mallazo se unió al armado de la cimentación del pilar, con el fin de solidarizar los movimientos y minimizar el desplazamiento de la cimentación como consecuencia del impacto. El acabado del hormigón se realizó mediante un talochado, tal como se muestra en la figura 4.15.
Fig. 4.15: Ejecución y acabado superficial de la pavimentación de la rampa.

Parte experimental a escala real
177
Una vez resuelto el problema de la velocidad inicial, se planteó un segundo problema, del cual se preveía su existencia desde el primer momento, y cuya existencia fue confirmada tras las primeras pruebas de velocidad sobre la rampa. El problema era mantener la dirección del vehículo durante su trayecto por la rampa. Para resolver este problema se diseñó un sistema de guiado sobre la rampa, consistente en una guía metálica atornillada al pavimento de la rampa y un volante metálico que se sitúa dentro de esta guía y que gira de forma solidaria con la rueda delantera izquierda del vehículo atornillada a la rueda del vehículo. De esta forma se evitan desplazamientos laterales del vehículo. La guía está formada por 2 perfiles metálicos tipo L-70x70x7 mm unidos por una pletina de 40x8 mm, tal como se muestra en la figura 4.16. En esta misma figura se muestra la guía metálica colocada en la rampa y en la figura 4.17 se puede ver una imagen completa de la rampa con la guía y la cimentación con las patas de anclaje.
Fig. 4.16: Sección de la guía metálica (izda.) y vista de esta guía una vez colocada en la rampa (dcha.)
Fig. 4.17: Rampa con guía, línea de centro y zapata con patas de anclaje.

Capitulo 4
178
La distancia de esta guía al centro de la rampa se calculó para que fuera capaz de albergar tanto vehículos grandes como pequeños, tal como se muestra en la figura 4.18.
Fig. 4.18: Situación de la guía en la rampa. Adaptación para distintos tipos de vehículos.
El anclaje del volante a la rueda del vehículo se realiza mediante unas
barras de sujeción que disponen de unas pletinas soldadas en un extremo, tal como se muestra en la figura 4.19. Las barras son varillas roscadas de 12 mm de diámetro y las pletinas, de 8 mm de espesor, tienen una perforación con un tamaño ligeramente superior a la utilizada en las ruedas de la mayor parte de los vehículos (figura 4.20). Esta perforación se puede alinear con la existente en la rueda del vehículo y, utilizando un tornillo de una longitud ligeramente superior a la original para las ruedas de ese vehículo, es posible fijar la barra de sujeción y la rueda con el mismo tornillo. Una vez realizada esta operación con los cuatro tornillos tenemos las cuatro barras alineadas en dirección

Parte experimental a escala real
179
paralela al suelo. Estas barras se introducen por los cuatro agujeros de que dispone el volante en su zona central y se fija el movimiento lateral del volante mediante tuerca y contratuerca en la barra roscada a ambos lados del volante. En la figura 4.22 se muestra una imagen del dispositivo completamente montado y en funcionamiento.
Fig. 4.19: Partes del sistema de sujeción del volante a la rueda.
Fig. 4.20: Varillas de sujeción y pletina. Definición geométrica (cotas en mm).

Capitulo 4
180
Fig. 4.21: Volante metálico, vistas de frente y perfil y despiece de las piezas (A) y (B). Definición geométrica (cotas en mm).
En el diseño del volante se tuvo especial precaución en que este sistema
fuera válido para la mayor parte de los vehículos. Para ello se hizo un estudio del número de tornillos en las llantas y de las distancias entre estos tornillos para los vehículos más comunes. Finalmente se concluyó que el número de tornillos en las llantas para los vehículos más comunes era de cuatro y un valor medio para la distancia entre los ejes de dos de estos tornillos más alejados entre sí era de 100 mm. Con estos condicionantes se diseñó el volante metálico y las varillas de sujeción.

Parte experimental a escala real
181
Fig. 4.22: Dispositivo de guiado montado.
Es necesario resaltar que, aunque el sistema ha sido descrito para
ruedas equipadas con cuatro tornillos de sujeción, se puede utilizar en ruedas con mayor número de tornillos, simplemente eligiendo aquellos con los que sea más sencillo formar una figura cuadrada con las barras de sujeción. La distancia existente entre las pletinas y el volante permite que las barras soporten pequeñas desviaciones respecto de la situación original para la que fueron diseñadas.
4.4. ESPÉCIMEN DE ENSAYO
Como espécimen de ensayo se utilizó un pilar de hormigón armado de sección rectangular de 25 x 35 cm y 2.75 m de altura. El hormigón utilizado en el pilar fue tipo HA-25/B/20/IIa. El armado está compuesto por 6 barras de acero corrugado de diámetro 12 mm para el armado longitudinal y estribos de diámetro 8 mm cada 15 cm para el armado transversal. En la figura 4.23 se muestra una sección transversal del espécimen. En la parte inferior del pilar se colocó una placa de anclaje con el fin de posibilitar el cambio de pilar cuando fuera conveniente sin necesidad de modificar la cimentación. Esta placa, fabricada en chapa de acero de 20 mm, cuenta con 4 barras de acero

Capitulo 4
182
corrugado de 20 mm de diámetro para el anclaje al hormigón del pilar y con 6 agujeros para fijar el pilar en su posición en la zapata, a través de los 6 pernos de anclaje que se dejaron embebidos en la cimentación para este fin. En la figura 4.24 se muestra una representación tridimensional del pilar con el armado y la placa de anclaje así como las características geométricas y detalles de esta placa de anclaje.
Fig. 4.23: Sección transversal del pilar de ensayo (dimensiones en mm).
Fig. 4.24: Representación tridimensional del pilar y su placa de anclaje y definición geométrica de esta placa.

Parte experimental a escala real
183
Durante el hormigonado del pilar se tomó una muestra del hormigón con la que se fabricaron 3 probetas cilíndricas de diámetro 150 mm y altura 300 mm, siguiendo las indicaciones dadas en las normas UNE 83300 y UNE 83301. Una de estas probetas endureció en cámara húmeda y las otras 2 permanecieron en el mismo lugar en que estuvieron los pilares durante este tiempo de endurecimiento. Una vez transcurridos 28 días se utilizaron las probetas para obtener el módulo de elasticidad, según norma UNE 83316 y se rompieron a compresión simple según norma UNE 83304.
Tabla 4.1 Ensayos realizados sobre las probetas de hormigón Probeta Curado Resistencia última (MPa) Módulo elástico (MPa)
1 Cámara húmeda 35.71 36438 2 Cámara húmeda 34.22 35524 3 Lugar de ensayo 33.38 34271
4.5. PUESTA EN CARGA DEL ESPÉCIMEN
La carga total a aplicar sobre el pilar en este trabajo es de 700 kN, tal como se ha justificado en el apartado 3.3. Para el tesado se utilizaron 4 barras de postesado tipo Macalloy 1030, con 36 mm de diámetro y longitud aproximada de 3 m.
Fig. 4.25: Detalle de la barra tipo Macalloy.
Las barras fueron sometidas a ensayo por parte de un laboratorio externo con el fin de determinar sus características mecánicas. Los resultados son los que se muestran en la tabla 4.2.

Capitulo 4
184
Tabla 4.2 Características mecánicas de las barras de tesado 0.1% Carga
ensayo (kN)
0.1% Tensión de ensayo (N/mm2)
Carga última (kN)
Tensión última
(N/mm2)
Elongación (%)
Módulo de elasticidad (kN/mm2)
919.76 880 1111.26 1066 10.2 159.33
Las barras se tesaron desde el cabezal, que había sido diseñado teniendo en cuenta las dimensiones mínimas para alojar el montaje de tesado, que se muestra en la figura 4.26. El gato utilizado en el tesado fue un tipo RCH-603, con relación de presión 858 N/bar.
Fig. 4.26: Montaje para tesado de cada una de las barras, esquema y fotografía realizada durante el tesado.
La carga necesaria en cada barra, teniendo en cuenta el ángulo que cada una de ellas forma con la vertical es de:
7004 196.4
cos 27kN
Con ello, la tensión final que soportará cada barra será de:

Parte experimental a escala real
185
22
196400 192.95 N/mm362
Lo que supone que están trabajando a un 22% de su límite elástico, según la tabla 4.2.
Las barras se tesaron de forma individual y con un orden de tesado cruzado, tal como se muestra en la figura 4.27. Además, con el fin de evitar daños en el hormigón durante la operación de tesado, se aplicó la carga en 4 escalones, de forma que la fuerza de tesado aplicado en cada escalón en cada una de las barras es la que se muestra en la tabla 4.2. Por tanto, el esquema de tesado mostrado en la figura 4.27 se realizó 4 veces, cada una con la carga correspondiente su etapa, según la tabla 4.3. En la figura 4.28 se muestran los extremos de las barras de tesado, una vez finalizado el trabajo de tesado.
Fig. 4.27: Orden de tesado de las barras. Vista desde la parte superior del cabezal.
Tabla 4.3 Características mecánicas de las barras de tesado
ETAPA Fuerza de tesado (kN) Presión en el gato (Bar) 1 50 60 2 100 119 3 150 179 4 196.4 243

Capitulo 4
186
Fig. 4.28: Extremos de las barras ya tesadas en el cabezal y en una de las patas.
4.6. VEHÍCULOS PARA LOS ENSAYOS
Los vehículos utilizados en los ensayos proceden de desguaces. No obstante, a estos vehículos se les han exigido una serie de condiciones mínimas para poder ser utilizados en los ensayos. La más importante de estas condiciones fue que la parte delantera del vehículo estuviera intacta, es decir, que el sistema de amortiguación delantero no hubiera sufrido ningún percance y por tanto fuera capaz de disipar la misma energía durante el impacto que un vehículo en perfectas condiciones. Además, dado el escaso espacio de maniobra en la rampa y en su acceso, fue necesario que el coche funcionara para moverlo y colocarlo en la posición correcta sobre la rampa. Finalmente, los vehículos escogidos y sus características principales son las que se muestran en la tabla 4.4. y en la figura 4.29.
Fig. 4.29: Vehículos utilizados en los ensayos, de izquierda a derecha y de arriba a bajo: Seat Ibiza, Renault 19 Chamade, Ford Escort, Seat Málaga, Fiat Punto.

Parte experimental a escala real
187
Tabla 4.4 Características principales de los vehículos utilizados en los ensayos Ensayo Vehículo Año de fabricación Masa (kg)
1 Seat Ibiza 1979 800 2 Renault 19 Chamade 1994 1085 3 Seat Málaga 1989 975 4 Ford Escort 1989 977 5 Fiat Punto 1994 830
4.7. INSTRUMENTACIÓN UTILIZADA
La instrumentación utilizada se puede agrupar en función del tipo de registro tomado, de forma que los registros leídos y los dispositivos utilizados han sido:
Aceleración: Acelerómetros de impacto, triaxial, estructural y sísmico
Desplazamientos: Captadores de desplazamiento y cámara de alta velocidad
Deformación: Galgas extensométricas
En este apartado se describe toda la instrumentación utilizada en la parte experimental. En los apartados siguientes se describirán cada uno de los ensayos realizados y se detallará la instrumentación utilizada en cada uno de ellos.
Todos los acelerómetros utilizados son de la marca PCB y sus características son las que se detallan en la tabla 4.5, junto con una imagen de cada uno de los dispositivos. La falta de información sobre el nivel de aceleración a registrar obligó al uso de acelerómetros de muy distintos rangos de medida, tal como puede comprobarse en esta relación. No obstante, tras los primeros ensayos, se pudo determinar el rango de medida para este tipo de ensayos y a partir de ese momento se utilizaron únicamente los acelerómetros correspondientes a este rango de medida.

Capitulo 4
188
El captador de desplazamiento lineal utilizado es un transductor potenciométrico con salida analógica y capacidad para registrar desplazamientos de hasta 150 mm de la marca Penny & Giles (figura 4.29). El rango de frecuencias es de 10 a 2000 Hz y la velocidad máxima del eje es de 10 m/s. Además se utilizaron galgas extensométricas para hormigón.
Tabla 4.5: Tipos de acelerómetros utilizados TIPO IMPACTO
Marca / Modelo PCB / 350B03 Sensibilidad (mV/g) 0.5 Rango de medida (g) 10000
Rango de frecuencia (Hz) 0.4 – 10000
TIPO TRIAXIAL
Marca / Modelo PCB / 356A16 Sensibilidad (mV/g) 100 Rango de medida (g) 50
Rango de frecuencia (Hz) 0.5 – 5000
TIPO ESTRUCTURAL
Marca / Modelo PCB / 333B50 Sensibilidad (mV/g) 1000 Rango de medida (g) 5
Rango de frecuencia (Hz) 0.5 – 3000
TIPO SÍSMICO
Marca / Modelo PCB / 393A03 Sensibilidad (mV/g) 1000 Rango de medida (g) 5
Rango de frecuencia (Hz) 0.5 – 2000
Fig. 4.29: Captador de desplazamiento lineal.

Parte experimental a escala real
189
Como material auxiliar se utilizó un acondicionador de la señal (482A22 PCB Piezotronics) con 4 canales, una tarjeta digitalizadora (PCD-300A Kyowa) con 4 canales para los acelerómetros y una tarjeta adicional (Spider8 HBM) para los captadores de desplazamientos y galgas extensométricas.
Se seleccionaron 4 puntos de medida en el pilar para ser instrumentados, situados a diferentes alturas correspondientes a puntos singulares, tal como se detalla en la tabla 4.6. Todos estos puntos están situados en la cara opuesta a la que recibe el impacto y en el centro de la cara. En la figura 4.30 se muestra cada uno de estos puntos. El detalle de la instrumentación concreta utilizada en cada punto y en cada ensayo se da en el apartado 4.9. de esta memoria, en el que se describen los ensayos realizados con el material relacionado hasta el momento.
Tabla 4.6 Puntos instrumentados en el pilar Punto Altura sobre la base Singularidad
1 2.75 Cabeza del pilar 2 1.85 Punto internedio 3 1.3 Punto de máximo desplazamiento esperado 4 0.6 Punto que recibe el impacto
Fig. 4.30: Instrumentación colocada en cada punto de control del pilar.

Capitulo 4
190
4.8. NUEVA TÉCNICA DE MEDICIÓN DE DESPLAZAMIENTOS DINÁMICOS
4.8.1. LIMITACIONES DE LA INSTRUMENTACIÓN UTILIZADA
Los sensores de desplazamiento utilizados tradicionalmente, como los transductores potenciométricos utilizados en este trabajo, presentan algunos inconvenientes en la medición de desplazamientos provocados por impactos. El más restrictivo es la necesidad de una estructura auxiliar situada a pocos centímetros de la estructura a medir, pero a la vez, con capacidad para no verse afectada por el movimiento de la estructura directa o indirectamente a través de sus puntos de apoyo. En la práctica, estas características resultan poco menos que imposibles de conseguir. Por tanto, la medición de estos sensores no es absoluta sino relativa entre la estructura a medir y la estructura auxiliar. Sería necesario determinar el movimiento de la estructura auxiliar en el punto en que se encuentra fijado el sensor, con lo que tenemos un problema recurrente. Además, la energía del impacto puede provocar que el extremo del sensor que apoya sobre la estructura se separe de esta durante algunos instantes, con lo que la medida final es bastante más grande que la real. Todo ello provoca que frecuencias y desplazamientos medidos con estos sensores sean de dudosa fiabilidad para la medición de desplazamientos provocados por impactos.
Por otra parte, a través de acelerómetros es posible medir la aceleración en función del tiempo sin mayores inconvenientes, ya que estos sensores son fijados directamente a la estructura a medir y tienen una masa lo suficientemente pequeña como para evitar que el movimiento se vea afectado por las fuerzas de inercia provocadas por el sensor. En principio, a partir de la aceleración medida, sería posible obtener el desplazamiento a través de la doble integración de la señal, aplicando algunas correcciones [Park, 2005]. A pesar de que esto es teóricamente posible, en la práctica la integración directa no ofrece buenos resultados [Yang, 2006; Stiros, 2008]. En medidas procedentes de impactos, esta integración es todavía más complicada debida al salto frecuencial que se da al principio de la señal; punto que coincide

Parte experimental a escala real
191
además con el que tendrá el máximo desplazamiento. También hay que tener en cuenta que la amplitud de la aceleración es proporcional al cuadrado de la frecuencia, por lo que las señales debidas a los modos asociados a altas frecuencias y bajos desplazamientos pueden ocultar resultados interesantes de desplazamientos, debidos a bajas frecuencias [Ferrer, 2010].
Existen otros equipos capaces de medir desplazamientos sin contacto, como vibrómetros laser o radares, basados en interferometría, con los que se pueden medir desplazamientos con precisión y rango dinámico bastante altos [Cunha, 2001; Nassif, 2005]. No obstante, estos sensores suelen ser bastante caros, por lo que no es posible su uso en muchos casos, como lo ha sido el que nos ocupa. Otros sensores sin contacto son los basados en el sistema GPS, pero su precisión se sitúa alrededor de 15 cm, por lo que únicamente son válidos para detectar grandes desplazamientos [Nickitopoulou, 2006].
Por otra parte, los sistemas ópticos y basados en la imagen son una alternativa conocida a los sensores tradicionales [Hack, 2005; Wahbeh, 2003; Lee, 2006]. Gracias al creciente desarrollo de la potencia de cálculo de los ordenadores el uso de estas técnicas es cada vez mayor. Uno de estos sistemas son las cámaras de alta resolución, tanto en el dominio espacial como en el temporal.
4.8.2. NUEVA TÉCNICA DESARROLLADA
El nuevo método desarrollado utiliza una cámara de vídeo de alta velocidad monocromática (figura 4.31 (dcha.)). Además es necesaria una diana colocada sobre el elemento del que se quiera medir el desplazamiento. En nuestro caso se ha utilizado una cámara de alta velocidad de la marca AOS con capacidad para registrar 1000 imágenes por segundo y con resolución espacial de 800x560 px; la diana utilizada es la que se muestra en la figura 4.31 (izda.) y se colocó sobre la superficie de hormigón en una de las caras paralelas a la dirección del impacto y a una altura de 1.3 m, de forma que coincidiera con el punto 3 instrumentado (figura 4.32). La cámara se situó

Capitulo 4
192
sobre un trípode a una distancia aproximada de 2 m del pilar, enfocando a la diana de forma frontal.
Fig. 4.31: Cámara de alta velocidad y diana utilizada en la superficie del hormigón.
Fig. 4.32: Posición de la cámara de alta velocidad durante el ensayo.
El método consiste en apilar las imágenes secuencialmente de forma que se obtiene un tensor tridimensional. Esta estructura permite resecuenciar las imágenes; es decir, realizar un corte tomográfico de toda la pila de imágenes en cualquier dirección. Este procedimiento es similar al utilizado habitualmente en tomografías. Si se elige la dirección temporal, el resultado es el movimiento de la intersección de la diana con el plano de corte elegido (figura 4.33).

Parte experimental a escala real
193
Fig. 4.33: Resecuenciado de las imágenes para obtener el movimiento en función del tiempo.
Además es posible obtener la relación existente entre longitud y pixeles, a partir del número de pixeles que intervienen en una determinada distancia que resulta conocida, ya que se trata del tamaño real de la diana. Conocida esta relación, resulta obvio determinar la máxima amplitud de la onda resultante de la técnica de resecuenciado.
En principio se utilizó esta técnica únicamente como comprobación de las lecturas de desplazamientos dadas por los captadores; no obstante, tras los primeros ensayos y comparaciones entre resultados, se llegó a la conclusión de que las medidas tomadas con los captadores no eran válidas y por tanto, las únicas mediciones de desplazamientos que ofrecían garantías eran las obtenidas a través de esta cámara, por lo que se convirtió en un instrumento fundamental en esta investigación.
El procedimiento completamente descrito y aplicado sobre el impacto de una bola metálica contra un pilar metálico, se puede encontrar en [Ferrer, 2010].

Capitulo 4
194
4.9. ENSAYOS REALIZADOS
Se han realizado 5 ensayos de impacto con los vehículos descritos en la tabla 4.4. Las fechas de realización de estos ensayos, por su relación con sucesos anteriores como el hormigonado del pilar o el tesado del mismo, tienen especial relevancia. El tiempo transcurrido entre el hormigonado de los pilares y su tesado o su ensayo indica la resistencia adquirida por el hormigón en el momento de realizar estos trabajos. En la tabla 4.7 se detallan las fechas de los principales sucesos en el montaje del bastidor de pruebas, hormigonado de los pilares y realización de los ensayos.
Tabla 4.7: Fechas de los principales sucesos Evento Fecha
Hormigonado rampa 28/01/2009 Hormigonado zapata 30/01/2009 Hormigonado pilares 31/03/2009
Colocación pilar 21/04/2009 Tesado pilar 23/04/2009 1º Ensayo 02/05/2009 2º Ensayo 06/06/2009 3º Ensayo 23/07/2009 4º Ensayo 23/07/2009 5º Ensayo 23/07/2009
Durante la realización de los ensayos se situó el coche en la parte alta de la rampa, centrado con el eje de la misma y se ajustó la rueda guía. Una vez en esta posición, se aplicó un ligero impulso sobre el vehículo de forma que iniciara su movimiento sobre la rampa. A partir de este punto la aceleración de la gravedad es la encargada de incrementar la velocidad del vehículo hasta alcanzar los 20 km/h en el momento del impacto. El comportamiento del pilar durante el impacto ha sido monitorizado por medio de diferentes sensores previamente colocados sobre la superficie del hormigón. En la figura 4.34 se muestran algunas imágenes ilustrativas sobre el desarrollo de uno de los experimentos.

Parte experimental a escala real
195
Fig. 4.34: Desarrollo del ensayo correspondiente al 4º vehículo.
La instrumentación utilizada en cada ensayo se detalla en la tabla 4.8. Dado que en los primeros ensayos se desconocía el rango de aceleraciones esperado, se utilizaron acelerómetros de impacto, capaces de medir hasta 10000 g. No obstante, tras el primer ensayo se observó que la máxima aceleración registrada era muy inferior a la esperada y que se situaba entorno a 3 g, por lo que gran parte de las variaciones de aceleración quedaban encubiertas por el ruido de la señal, generado en parte por la tarjeta digitalizadora. En el segundo ensayo se utilizaron acelerómetros sísmicos y estructurales, con el mismo rango de medida de aceleración (5 g) con el fin de comparar su comportamiento. A pesar de que los resultados obtenidos con ambos acelerómetros fueron similares, los valores máximos fueron mejor recogidos por los acelerómetros sísmicos, motivo por el que fueron seleccionados para el resto de ensayos realizados.
Las frecuencias de digitalización de datos fueron de 5000 Hz para los acelerómetros y 1200 Hz para los captadores de desplazamientos y galgas

Capitulo 4
196
extensométricas. Por tanto las máximas frecuencias registradas serán de 2500 Hz y 600 Hz respectivamente.
Tabla 4.8: Instrumentación utilizada en cada ensayo Ensayos Punto Sensor 1 2 3 4 5
Acelerómetro de Impacto Acelerómetro Triaxial
Acelerómetro Estructural Acelerómetro Sísmico
1
Captador de Desplazamientos Acelerómetro de Impacto Acelerómetro Estructural
Acelerómetro Sísmico Captador de Desplazamientos
2
Galga Extensométrica Acelerómetro de Impacto Acelerómetro Estructural
Acelerómetro Sísmico Captador de Desplazamientos
Galga Extensométrica
3
Cámara de Alta Velocidad Acelerómetro de Impacto Acelerómetro Estructural
Acelerómetro Sísmico Captador de Desplazamientos
4
Galga Extensométrica
La velocidad del vehículo en el instante del impacto fue determinada a través de una cámara de video enfocando la zona del impacto. Para ello se colocaron en el vehículo unas bandas verticales de color negro, separadas entre sí 25 cm, tal como se muestra en la figura 4.35 (izda.). La superposición de los fotogramas correspondientes a los dos últimos instantes (figura 4.34 (dcha.)) permite la medida del desplazamiento de una misma banda vertical (señalado con una flecha en la imagen). Además, el calibrado de la imagen se puede realizar a partir de la distancia conocida entre dos bandas en un mismo fotograma. Conocido el desplazamiento y el tiempo transcurrido entre secuencias, el cálculo de la velocidad es inmediato.

Parte experimental a escala real
197
Fig. 4.35: Bandas negras colocadas en el lateral del vehículo (izda.), Superposición de los
fotogramas correspondientes a los dos últimos tiempos (dcha.)
Realizado este procedimiento con todos los vehículos, se ha determinado que la velocidad en el momento del impacto ha sido aproximadamente de 20 km/h en todos ellos.
4.10. RESULTADOS OBTENIDOS
El desarrollo de deformaciones plásticas en los vehículos determina la importancia del uso de vehículos reales como proyectil en este tipo de experimentos en lugar de cuerpos rígidos u otro tipo de elemento no realista. Estas deformaciones plásticas evidencian la disipación de energía que experimenta el proyectil en una situación real y que modifica la respuesta de la estructura sometida a impacto. Para altas velocidades de impacto, la aparición de deformaciones plásticas en los vehículos es obvia; sin embargo, para bajas velocidades, este hecho no resulta tan evidente. Por ello, uno de los primeros resultados constatables es el estado final de los vehículos y, en concreto, el desarrollo de deformaciones plásticas en ellos.
Tras los experimentos realizados, todos los vehículos experimentaron deformaciones plásticas, en mayor o menor medida. En algunos casos, los daños en el vehículo incluyen pérdida del parachoques, de algún faro o del tubo de escape. Una vista frontal de los vehículos tras los experimentos se puede ver en la figura 4.36.

Capitulo 4
198
Fig. 4.36: Estado final de los vehículos tras los ensayos.
La medida de estas deformaciones plásticas se determinó como la distancia entre la estructura sin deformar del vehículo y el punto más deformado, en la dirección del impacto, como muestra la figura 4.37. En la tabla 4.8 se detalla esta medida para cada vehículo. Salvo en el caso del Ford Escort, que dio valores inferiores a lo esperado, las deformaciones máximas son proporcionales a la masa del vehículo, por lo que en principio parece que esta característica tiene influencia en la respuesta del pilar. No obstante, hay que tener en cuenta que la estructura resistente de un vehículo y los elementos amortiguadores se diseñan en función de la masa del mismo, por lo que es posible que no sea únicamente la masa la que esté influyendo en los resultados obtenidos, si no las características amortiguadoras que van ligadas a la masa de cada vehículo. Si esto fuera cierto podríamos comprobar que, si variamos la masa de un mismo vehículo, los resultados obtenidos no cambian; únicamente cambian con el cambio de vehículo. Esta característica se comprobará en la parte numérica.

Parte experimental a escala real
199
Fig. 4.37: Distancia medida en cada vehículo tras el impacto.
Tabla 4.8: Deformaciones máximas medidas en cada vehículo tras el impacto Impacto Vehículo Masa (kg) Deformación máxima (mm)
1 Seat Ibiza 800 250 2 Renault 19 Chamade 1085 400 3 Seat Málaga 975 300 4 Ford Escort 977 240 5 Fiat Punto 830 280
En cuanto al comportamiento del pilar, no se observó ninguna fisura en
el hormigón; no obstante, sí fue observado el despegue del hormigón y la placa de acero en la zona de máxima tracción (figura 4.38). Este hecho modifica sustancialmente las condiciones de contorno del pilar, lo que se ha tenido en cuenta en la modelización matemática que se describe en el siguiente capítulo.
Fig. 4.38: Despegue del hormigón y la placa de anclaje (zona marcada).
En cuanto a los datos registrados por los acelerómetros, en la figura
4.39 se muestra la aceleración registrada en el punto situado a 1.85 m de altura en el 3º impacto, a modo de ejemplo. En la parte inferior de la figura se
MÁXIMA DEFORMACIÓN TRAS EL IMPACTO

Capitulo 4
200
ha representado su transformada de Fourier, en la que se observan claramente 2 picos diferenciados; estos 2 picos de frecuencia aparecerán en todas las señales procedentes de acelerómetros, como veremos más adelante. Hay que destacar que, a pesar de que la máxima frecuencia detectable es de 2500 Hz, se ha representado únicamente la parte correspondiente al intervalo desde 0 a 300 Hz, por claridad de la imagen.
Fig. 4.39: Señal tomada del acelerómetro situado en el punto situado a 1.85 m de altura en el 3º impacto y su transformada de Fourier.
Si ampliamos la primera parte de la señal, podemos ver (figura 4.40)
que existen dos comportamientos claramente diferenciados; durante los primeros 120 ms del impacto la señal es muy irregular y no sigue ningún comportamiento armónico. Sin embargo, a partir de este tiempo se observa claramente como la señal se ajusta a una onda armónica. La primera parte de la señal se corresponde con el intervalo en el que el vehículo está empujando al pilar (tiempo de carga), mientras que la segunda parte se corresponde con la vibración libre del pilar una vez cesado el contacto con el vehículo por el rebote. Este comportamiento se observa en todos los ensayos, así como en los

Parte experimental a escala real
201
resultados obtenidos a partir de la cámara de alta velocidad, a través del procedimiento descrito en el apartado 4.8 de esta memoria, tal como se observa en la figura 4.41. La duración de la parte irregular coincide tanto en los acelerómetros como en la cámara, así que se puede afirmar que el tiempo de carga para este impacto fue de 150 ms aproximadamente. Para el resto de los ensayos, el tiempo de carga es el que se muestra en la tabla 4.9.
Fig. 4.40: Detalle de la aceleración mostrada en la figura 4.37, en la primera parte del
impacto.
Tabla 4.9: Duración del contacto vehículo-pilar en cada ensayo Impacto Vehículo Masa (kg) Duración del contacto (ms)
1 Seat Ibiza 800 102 2 Renault 19 Chamade 1085 142 3 Seat Málaga 975 150 4 Ford Escort 977 147 5 Fiat Punto 830 159
Fig. 4.41: Resultados obtenidos a partir de la cámara de alta velocidad en el 4º impacto (arriba) y reconstrucción numérica de la señal (debajo).

Capitulo 4
202
Por otro lado, es interesante el análisis de las frecuencias observadas en función del tiempo, ya que permite distinguir entre las frecuencias propias de la estructura y las provocadas por la interacción entre el vehículo y la estructura. Para la señal mostrada en la figura 4.39 se ha realizado este análisis y se ha obtenido la figura 4.42, en la que los colores más cálidos indican mayores valores de la amplitud de la frecuencia. Se observa que la frecuencia correspondiente a 64 Hz tiene una duración y una localización temporal coincidente con la carga del pilar, mientras que la frecuencia correspondiente a 17 Hz se mantiene durante mucho más tiempo. Por tanto, este último valor se corresponde con la frecuencia propia de la estructura.
Fig. 4.42: Diagrama tiempo-frecuencia de la señal mostrada en la figura 4.37.
Además de este comportamiento general de las señales registradas por
los acelerómetros, la máxima aceleración alcanzada en cada uno de ellos es un dato de interés. En la tabla 4.10 se recogen estos picos de aceleración para cada ensayo y cada punto del pilar. En primer lugar hay que destacar la existencia de las aceleraciones registradas en la cabeza del pilar (punto 1), lo que implica su movimiento el impacto. En este punto es necesario recordar que los únicos elementos que modifican el movimiento de la cabeza del pilar como voladizo son las barras de tesado. Estas barras, además de imprimir una fuerza de compresión en el pilar, actúan de forma similar a un muelle situado en la cabeza del pilar y de forma perpendicular a su eje.
Por otra parte, resulta singular el aumento de aceleración registrado en ese mismo punto a partir del 3º impacto. Este incremento se explica por la

Parte experimental a escala real
203
pérdida de tensión que experimentaron las barras de tesado durante la realización de los ensayos. Hay que tener en cuenta que los ensayos 3, 4 y 5 se realizaron el mismo día, 3 meses después de la carga del pilar y, lógicamente, después de los ensayos 1 y 2. Todo ello provocó una pérdida de tensión en las barras que fue corroborada tras los ensayos 3, 4 y 5, cuando se registró una carga de 15.1 T por barra en lugar de las 19.62 T que fueron aplicadas inicialmente. Esta pérdida de tensión provocó unas aceleraciones mayores en la cabeza que las experimentadas hasta el momento.
Tabla 4.10: Aceleraciones máximas en cada punto y en cada impacto Máxima aceleración (g)
Punto 1º impacto 2º impacto 3º impacto 4º impacto 5º impacto 1 3 1.8 5 4.3 4.4 2 3.2 3.5 2.2 3.7 1.9 3 4.5 4.5 --- --- --- 4 3 3 2.8 3.8 2.9
Las señales recogidas por las cámaras de alta velocidad se analizaron
por comparación con las recogidas por acelerómetros. Si tomamos, por ejemplo, las señales recogidas durante el 2º impacto por la cámara de alta velocidad y por el acelerómetro situado en el punto 3 (1.3 m de altura) y calculamos sus transformadas de Fourier, obtenemos el gráfico mostrado en la figura 4.43. En esta figura se observa claramente que las frecuencias principales registradas por ambos dispositivos coinciden, en este caso en los valores de 17 y 64 Hz. Esta característica se ha observado en todos los ensayos. En la tabla 4.11 se dan las frecuencias obtenidas a partir de la transformada de Fourier de las señales registradas por cada sensor en cada punto del pilar y en cada ensayo.

Capitulo 4
204
Fig. 4.43: Transformada de Fourier de las señales recogidas por el captador de desplazamientos y la cámara de alta velocidad para el 2º impacto, en el punto situado a 1.3 m de altura.
Tabla 4.11: Frecuencias registradas en cada punto y en cada impacto Frecuencia (Hz) Punto Sensor 1º imp. 2º imp. 3º imp. 4º imp. 5º imp.
Acelerómetro 19-69.7 18.5-67.6 17.2-63.6 17.3-63.8 17.5-64.4 1 Cap. Desplaz. 19.04 18.5-44.2 17.2 24.3 21.3 Acelerómetro 19-69.8 18.5-67.6 17.5-64.8 17.3-64 17.5-64.4 2 Cap. Desplaz. 19 --- 17.19 24.3 21.3 Acelerómetro 19-69.8 18.5-67.6 --- --- --- Cap. Desplaz. 19 44.2-56.9 17.16 24.13 21.7 3 Cámara A.V. --- 18-67 17.3-64 17.3-64 17.5-64 Acelerómetro 19-70 18.5-67.6 17.4-64.4 62.78 17.4-20.7 4 Cap. Desplaz. --- 44.2-56.9 --- --- ---
En cuanto a las señales obtenidas por los captadores de desplazamiento,
han sido de menor utilidad, debido a los motivos expuestos ya en el apartado 4.8. de esta memoria. No obstante, se incluye en este apartado una breve descripción de los resultados obtenidos con estos sensores, con el fin de corroborar los motivos expuestos en aquél apartado. En la figura 4.44 se muestra una de las señales tomadas con un captador de desplazamientos y su correspondiente transformada de Fourier, como ejemplo de lo que se ha registrado con todos ellos. En esta transformada se observa en primer lugar la importancia relativa de una zona de bajas frecuencias situada entre 0 y 15 Hz. Estas frecuencias no han sido observadas en los acelerómetros, en ningún caso. La aparición de estas bajas frecuencias en los captadores puede deberse a ruido en la señal o incluso puede estar ligada al movimiento relativo de la

Parte experimental a escala real
205
estructura auxiliar en la que se sujetaron respecto a la superficie del hormigón. Por otro lado, la frecuencia que aparece como principal del sistema es de 24 Hz, mientras que la registrada por todos los acelerómetros y por la cámara de alta velocidad es de 17 Hz.
Fig. 4.44: Señal tomada del acelerómetro situado en el punto situado a 1.85 m de altura
en el 4º impacto y su transformada de Fourier.
Esta característica se ha observado en la mayor parte de las señales tomadas con los captadores de desplazamiento, de forma que, si comparamos las frecuencias obtenidas con cada sensor (tabla 4.11), comprobamos que mientras las frecuencias obtenidas con acelerómetros y cámara de alta velocidad coinciden siempre, las obtenidas con los captadores de desplazamientos no coinciden con las anteriores en todos los casos.
Con el fin de profundizar en el comportamiento de estos sensores durante un impacto, se realizaron ensayos adicionales con pequeños pilares metálicos. Como resultado de estos ensayos quedó probado que estos sensores tienen serias dificultades para registrar correctamente el desplazamiento impuesto por un impacto, debido, entre otras cosas, al movimiento de la estructura auxiliar sobre la que se sujetan y al posible despegue del punto a medir y la punta del sensor. Por tanto, los datos recogidos por los captadores de desplazamientos no serán considerados como válidos y únicamente se

Capitulo 4
206
tendrán en cuenta los resultados obtenidos a través de la cámara de alta velocidad.
Otra particularidad que se observa en las frecuencias obtenidas (tabla 4.11) es que éstas disminuyen con los experimentos, lo que resulta lógico dada la pérdida de tensión de los cables de tesado comprobado tras el 5º ensayo, como ya se ha comentado anteriormente.
En cuanto a los máximos desplazamientos registrados en cada punto, son los que se recogen en la tabla 4.12. A pesar de que ya se ha discutido la no validez de los datos obtenidos por los captadores de desplazamientos, se han incluido en la tabla 4.12 los valores que se obtienen a partir de estos sensores para compararlos con los obtenidos a partir de la cámara de alta velocidad en cuanto a desplazamientos y no en cuanto a frecuencias, como se ha realizado hasta el momento. Se observa que las medidas dadas por la cámara son bastante estables y proporcionan un desplazamiento situado entorno a 1.9 mm; sin embargo, el captador situado a la misma altura proporciona lecturas muy diferentes, que van desde 1.2 mm hasta 3.8 mm, sin motivo aparente para esta amplia variabilidad. En el resto de puntos monitorizados por los captadores, las lecturas también son erráticas, sin que se pueda observar un orden lógico y esperable para ellas.
Tabla 4.12: Desplazamientos máximos medidos en cada punto y en cada impacto Máximo desplazamiento medido (mm)
Punto 1º impacto 2º impacto 3º impacto 4º impacto 5º impacto 1 (Cap. Desplaz.) 1.2 2.1 1.2 2.7 1.8 2 (Cap. Desplaz.) 2.7 --- 4.4 5.7 3.8 3 (Cap. Desplaz.) 1.2 3.8 1.8 2.6 1.7 3 (Cámara A. V.) 1.7 1.8 2.1 2 1.8
Por tanto, y a pesar de que a partir de la cámara sólo ha sido posible conocer el desplazamiento de uno de los puntos monitorizados, y con ello se pierde mucha de la información que se pretendía obtener, es necesario descartar las lecturas obtenidas con los captadores de desplazamientos y

Parte experimental a escala real
207
considerar válidas únicamente las que pueden ser calculadas a partir de la cámara de alta velocidad.
No obstante, estos datos dados por la cámara de alta velocidad, tienen que ser rectificados, ya que se ha comprobado que la oscilación libre que aparece en la parte final de la señal no oscila entorno a 0, como sería de esperar ya que ningún elemento del pilar plastifica, si no que lo hace en un valor superior (figura 4.45). Esto puede deberse a varias causas, como una compresión del material situado alrededor de la cimentación, formado por rellenos procedentes de obras cercanas y escombros, con muy poca capacidad portante. Sin embargo, a partir de la relación longitud-pixel, es posible medir esta desviación y restarla de las medidas realizadas. De esta manera se ha determinado que la desviación ha sido de 0.5 mm como media en todos los ensayos realizados, con lo que las medidas realizadas por la cámara y corregidas son las que se muestran en la tabla 4.13.
Tabla 4.13: Desplazamientos máximos corregidos en el punto 3 y en cada impacto
Impacto 1º 2º 3º 4º 5º Máximo desplazamiento medido (mm) 1.2 1.3 1.6 1.5 1.3
Masa vehículo (kg) 800 1085 975 977 850
Fig. 4.45: Rectificación de la desviación de la oscilación libre en la señal procedente de la
cámara de alta velocidad para el 5º ensayo

Capitulo 4
208
4.11. CONCLUSIONES
Una de las conclusiones más importantes que se obtienen tras la campaña experimental es que la tensión de las barras de tesado ha ido disminuyendo con el tiempo, por lo que tendríamos una tensión en el ensayo 1 diferente del ensayo 2 y de los ensayos 3, 4 y 5, estos últimos realizados el mismo día, por lo que la tensión en las barras entre ellos sería bastante parecida. Esta pérdida de tensión ha sido observada en primer lugar en las frecuencias del movimiento del pilar obtenidas a través de los acelerómetros y la cámara de alta velocidad, y comprobada posteriormente en el destesado de las barras para el desmontaje del bastidor. El motivo de esta pérdida de tensión es la relajación de las barras de tesado, unido a la realización de los ensayos que ha provocado el asentamiento de las placas de anclaje, tornillos y tuercas, pasador y cuñas.
Además, en estos 3 últimos ensayos las frecuencias obtenidas son bastante similares y están situadas alrededor de 17.3 Hz y 64 Hz, para la primera y segunda frecuencias propias del pilar, respectivamente.
En cuanto a los desplazamientos, los únicos datos fiables son los obtenidos a través de la cámara de alta velocidad, por lo que finalmente se conoce el desplazamiento del punto monitorizado 3, situado a 1.3 m de la base del pilar. Para este punto el desplazamiento ha sido de 1.6 mm para vehículos de masa 970 kg (ensayos 3 y 4) y 1.3 mm para vehículos de 830 kg (ensayo 5). Los desplazamientos de 1.2 y 1.3 mm, obtenidos en los ensayos 1 y 2, con vehículos de 800 kg y 1085 kg, respectivamente, corresponden a diferentes estados tensionales iniciales para el pilar y las barras de tesado.
La velocidad justo antes del impacto del vehículo, determinada a través del análisis de las imágenes de una cámara de vídeo, resultó ser aproximadamente 20 km/h en todos los impactos.
Todas estas características serán tenidas en cuenta en la modelización del ensayo que se describe en el siguiente capítulo.

209
CAPÍTULO 5. NUEVO MODELO DE ELEMENTOS FINITOS
5.1. MODELO DE ELEMENTOS FINITOS PARA PILAR Y BASTIDOR
5.1.1. DESCRIPCIÓN DE LA GEOMETRÍA Y PARTES DEL MODELO
El modelo diseñado consta de las siguientes partes: Cabezal, Barras de
tesado, Hormigón, Armado longitudinal, Armado transversal y Placa de anclaje (figura 5.1).
Fig. 5.1: Partes del modelo, ejes y dirección del impacto.
El pilar, el cabezal y la plaza de anclaje son bloques sólidos de dimensiones 250 x 350 x 2750 mm, 800 x 800 x 200 mm y 600 x 600 x 20 mm respectivamente, expresado en los ejes x, y, z que se muestran en la figura 5.1.

Capitulo 5
210
Los armados longitudinal y transversal se han diseñado de forma discreta (no como armado disperso), de manera que se aprecian cada una de las barras del armado en el interior del hormigón. Las secciones de estas barras, diferentes entre ellas, se describen junto con los materiales asignados a cada parte.
5.1.2. DESCRIPCIÓN DEL MALLADO
Para todos los sólidos se ha elegido el mallado con elementos hexaédricos, por ser los que ofrecen un resultado más preciso y una mejor convergencia. Se ha elegido un tamaño común para el lado de elementos de diferentes partes, con el fin de que los nodos de superficies en contacto tengan las mismas coordenadas y puedan ser fundidos en un solo nodo, tal como se observa en la figura 5.2. El tamaño elegido tanto para el lado de los hexaedros como para la longitud de los elementos lineales es de 25 mm. Una vez mallado el pilar y el bastidor, el número de elementos resultantes es de alrededor de 26000.
Fig. 5.2: Detalles del mallado en cabezal (derecha) y placa de anclaje (izquierda).
5.1.3. CONDICIONES DE CONTORNO Y LIGADURAS ENTRE LAS PARTES
Los nodos del cabezal y del hormigón son coincidentes. La placa de anclaje tiene todos los nodos pertenecientes a su cara inferior con los movimientos impedidos en las tres direcciones.

Nuevo modelo de elementos finitos
211
Los nodos de la cara superior de la placa de anclaje y los de la cara inferior del hormigón son independientes salvo los situados en el eje central perpendicular al impacto; en este caso los nodos son coincidentes. Además, en la cara superior de la placa de anclaje se han impedido los movimientos en las direcciones x, y, z de los nodos situados en las coordenadas correspondientes a los seis pernos de anclaje.
En cuanto a las barras de tesado, comparten su nodo superior con el correspondiente del cabezal. El nodo inferior de estas barras tiene su movimiento restringido en todas las direcciones.
Por último, tanto el armado longitudinal como el transversal comparten nodos con el hormigón, con el fin de simular la adherencia del acero con el hormigón.
5.1.4. MODELO MATERIAL PARA EL HORMIGÓN
La elección del modelo para el hormigón ha sido un punto clave en el desarrollo del modelo de elementos finitos. Teniendo en cuenta los modelos disponibles en el código comercial LSDYNA, descritos anteriormente en esta memoria, se ha elegido el “Concrete Material Model 159”, también llamado “Continuous Surface Cap Model” (CSCM). Este modelo fue desarrollado para predecir el comportamiento dinámico (tanto en régimen elástico como en rotura) del hormigón estructural durante el choque contra un vehículo, por lo que su aplicación a este trabajo es directa. Además, este modelo ha sido evaluado por la Administración Americana de Carreteras (Federal Highway Administration) [Murray, 2007b] por comparación con ensayos de impacto a escala real. Como consecuencia de los buenos resultados obtenidos en esta evaluación, este modelo ha sido seleccionado por la Administración Americana de Carreteras para ser el modelo de referencia para todos los análisis relacionados con impactos de vehículos contra estructuras de hormigón situadas en carreteras, para lo que ha publicado un completo manual para el usuario [Murray, 2007a].

Capitulo 5
212
Se trata de un modelo de última generación cuyas características principales son:
Ecuaciones constitutivas isótropas
Superficie de plastificación basada en tres invariantes con traslación por endurecimiento
Superficie de cierre con endurecimiento que se expande y contrae
Pérdida de resistencia basada en la evaluación del daño con erosión y reducción del módulo elástico
Incremento de resistencia para altas velocidades de carga
La descripción detallada del modelo y de estas características se puede encontrar en textos de Murray, Lewis y Schwer [Murray, 1997, 1995; Schwer, 1994].
Este modelo tiene dos entradas de datos: en la más simple de ellas únicamente es necesario indicar la resistencia a compresión simple del hormigón y el tamaño máximo del árido; el resto de datos necesarios son calculados de forma interna por el programa, lo que supone una gran ayuda, dada la extensa lista de datos requeridos y la complejidad de algunos de los ensayos necesarios para la determinación de estos datos. No obstante, existe también la posibilidad de introducir cada uno de estos datos, para lo que el texto de Murray [Murray, 2007a] proporciona una gran ayuda, tanto en la descripción de cada una de las variables necesarias, como en los valores que toman por defecto o en las expresiones con las que se pueden obtener estos valores a partir de datos sencillos, como la resistencia a compresión simple o el tamaño máximo del árido.
Esta última forma de introducción de datos ofrece la posibilidad de modificar algunos de los valores en la modelización, como el módulo elástico del hormigón, que resultaría imposible de realizar con la generación automática de valores.

Nuevo modelo de elementos finitos
213
Dado que para el ajuste del modelo será necesario modificar, al menos el módulo elástico del hormigón, se ha optado por realizar una entrada de datos completa, para lo que es imprescindible conocer cada una de las variables implicadas, su relación con el modelo, sus valores recomendados y las implicaciones que tiene la elección de estos valores. Este análisis se ha realizado en el Capítulo 2 de esta memoria, por lo que se remite al lector a este capítulo. A continuación se detallarán los valores numéricos que se han tomado en este trabajo para cada uno de los parámetros necesarios para definir el modelo material para el hormigón.
Tomando una resistencia a compresión simple de 35 Mpa y un tamaño máximo del árido de 20 mm, los valores tomados en este trabajo para estos parámetros son los que se detallan en la tabla 5.6, en la que además se cita la característica relacionada con cada grupo de parámetros. Para la completa definición del modelo faltan en esta tabla los parámetros que definen el comportamiento elástico del material y su densidad. Estos parámetros se han utilizado para el ajuste del comportamiento del pilar durante el impacto, que se describe en el último apartado de este capítulo.
Tabla 5.6 : Valores tomados para los parámetros que definen el modelo material del hormigón (a falta de los parámetros elásticos)
Parámetro Definición Valor Superficie de fallo a cortante
Término constante 15.124 ( )MPa Término no lineal 10.500 ( )MPa Exponente 1.929e-2 1( )MPa Término lineal 0.3126 1( )MPa
Función de escala de Rubin
1 Término constante 0.7473 ( )MPa
1 Término no lineal 0.1700 ( )MPa
2 Término constante 0.6600 ( )MPa
2 Término no lineal 0.1600 ( )MPa
1 Exponente 6.5211e-2 1( )MPa
1 Término lineal 9.6836e-4 1( )MPa
2 Exponente 6.6211e-2 1( )MPa

Capitulo 5
214
2 Término lineal 1.2195e-3 1( )MPa Superficie de cierre
R Relación de aspecto de la superficie de cierre 5 W Máxima compactación volumétrica plástica 0.05
1D Parámetro lineal de forma de la superficie de cierre 2.50 4 ( )e MPa
2D Parámetro cuadrático de forma de la superficie de cierre
2( )3.49 7 MPae
0X Posición inicial de la superficie de cierre ( )93.0266 MPa Formulación del daño
B Parámetro de debilitación en daño frágil 100 D Parámetro de debilitación en daño dúctil 0.1 modp Parámetro para modificar la pérdida de resistencia en
tensiones hidrostáticas moderadas 0
TFG Energía de fractura en compresión simple 0.08257 ( )MPa
FcG Energía de fractura en tracción simple 8.25725 ( )MPa
FsG Energía de fractura en cortante puro 0.08257 ( )MPa pwrt Parámetro de transición de cortante a tracción 1 pwrc Parámetro de transición de cortante a compresión 5
ERODE Define el valor mínimo para el que el elemento es eliminado cuando el daño es mayor que 0.99 1.05
Efectos velocidad de deformación repow Exponente que permite incrementar la energía de
fractura debida a los efectos de velocidad de carga 1
Srate Relación entre los parámetros de fluidificación a cortante y a tracción 1
overt Máxima sobretensión permisible en tracción 23.74 (s, MPa) overc Máxima sobretensión permisible en compresión 23.74 (s, MPa)
0t Parámetro para modelar el efecto de velocidad de carga para tracción unidireccional 5.0719e-5 (s, MPa)
0c Parámetro para modelar el efecto de velocidad de carga para compresión unidireccional 3.1665e-4 (s, MPa)
tN Exponente para modelar el efecto de velocidad de carga para tracción unidireccional 0.48
cN Exponente para modelar el efecto de velocidad de carga para compresión unidireccional 0.78
Endurecimiento cinemático
HC Velocidad de endurecimiento 0
HN Inicio del endurecimiento 0

Nuevo modelo de elementos finitos
215
5.1.5. MATERIALES PARA EL RESTO DE COMPONENTES
El resto de componentes del modelos son la placa de anclaje inferior, el cabezal superior, las barras de acero de tesado y el armado del pilar. Todos ellos son de acero, por lo que su modelización presenta algunas características comunes.
Para todos los ellos se han utilizado unos valores para la densidad de 7850 kg/m3, un coeficiente de Poisson de 0.3 y un módulo elástico de 210000 MPa. Únicamente para las barras de tesado el módulo elástico es diferente, ya que se ha adoptado el obtenido en ensayos realizados por laboratorios externos, con un valor de 159.33 GPa.
En cuanto a los materiales utilizados, se ha elegido un material perfectamente elástico para la placa de anclaje inferior, ya que no se espera que alcance su límite elástico. Además, consideramos que el cabezal es lo suficientemente rígido como para deformarse bajo las cargas que va a soportar, por ello se ha elegido un material rígido para simular su comportamiento. Por último, tanto para las barras de tesado como para el armado del pilar se ha tomado un material elasto-plástico, con límite elástico de 880 MPa.
5.1.6. PRECARGA Y TIPO DE CÁLCULO REALIZADO
Una cuestión a resolver en el cálculo es la aplicación de las cargas estáticas y permanentes en el modelo, es decir, el tesado de las barras del bastidor y la gravedad en todo el modelo. La aplicación de estas cargas directamente en la fase dinámica del cálculo provoca unos efectos dinámicos como consecuencia de la aplicación instantánea de una carga impulsiva en la cabeza del pilar. Esta carga impulsiva provoca la aparición de ondas de tensión de gran intensidad que desvirtúan el resultado obtenido para esta fase dinámica. Resulta por tanto imprescindible realizar una precarga de la

Capitulo 5
216
estructura, de manera que las acciones dinámicas aplicadas sean únicamente las correspondientes al choque del vehículo y que, en ese momento, la estructura se encuentre sometida a las cargas estáticas que presentaba el bastidor en el momento del ensayo. La forma de realizar esta precarga en LSDYNA tiene varias alternativas, tal como se detallan a continuación:
Relajación dinámica en cálculo explícito (IDRFLG = 1 ó -1): Se trata de
realizar un cálculo explícito en una primera fase, de forma que se aplican las cargas junto con un coeficiente de amortiguación que se aplica reduciendo las velocidades nodales en cada paso. Durante el proceso se evalúa la energía cinética del modelo y la convergencia como la relación entre la energía cinética distorsional en ese momento y el pico de energía cinética distorsional. Cuando la convergencia es menor que un valor previamente establecido, el cálculo finaliza. La energía cinética distorsional es la energía cinética total menos la energía cinética debida al movimiento de sólido rígido. Además se puede indicar un tiempo final para el cálculo en el caso de que la convergencia no llegue a alcanzarse. Durante el cálculo se crea el fichero “relax” en el que se almacenan los datos relativos a la energía cinética, con los que se puede comprobar la evolución del modelo durante la precarga. Cuando finaliza este cálculo explícito se crean dos ficheros de salida: un fichero binario (d3dump02) y un fichero tipo ASCII en el que se almacenan los valores de desplazamientos, rotaciones y temperaturas nodales finales del modelo (drdisp.sif). A partir de aquí se puede reiniciar el cálculo en la segunda fase con la estructura precargada y las acciones dinámicas necesarias de dos maneras: realizar un reinicio (*RESTART) del cálculo utilizando el fichero binario d3dump02 como datos de entrada o utilizar el fichero drdisp.sif, con lo que el estado precargado se alcanza rápidamente a través de 100 pasos en los que los desplazamientos, rotaciones y temperaturas nodales aumentan linealmente hasta los valores establecidos en el fichero drdisp.sif (IDRFLG = 2).

Nuevo modelo de elementos finitos
217
Relajación dinámica en cálculo implícito (IDRFLG = 5): El cálculo realizado en la primera fase es implícito y, por defecto, estático. No obstante, se puede realizar también como transitorio (*CONTROL_IMPLICIT_DYMANICS); en este caso es necesario especificar un tiempo final para el cálculo (*CONTROL_IMPLICIT_GENERAL). Cuando se alcanza este tiempo, el programa reinicia el cálculo dinámico a partir de la solución obtenida. Esta segunda fase puede calcularse de forma implícita o explícita, en función de lo que se haya especificado (IMFLAG).
El tipo de material elegido para el hormigón no permite un cálculo
implícito, por lo que el segundo método no es posible aplicarlo en nuestro caso. Por tanto, la relajación dinámica se realizó de modo explícito en la primera fase del cálculo. Para la segunda fase, se reinició el cálculo utilizando el fichero d3dump02 como datos de entrada. La opción de reiniciar el cálculo de forma total permite incorporar nuevos nodos y elementos al modelo inicial, con lo que fue posible realizar el cálculo de la primera fase únicamente con el modelo del bastidor y pilar, mientras que el vehículo se incorporó al modelo en la segunda fase. Con ello se simplificó el primer modelo utilizado y se mejoró el tiempo de cálculo.
El coeficiente de amortiguación aplicado durante la precarga fue de 0.995 y se estableció que el valor de la convergencia fuera de 0.001. El tiempo final para el cálculo fue de 0.2 s. Durante la relajación dinámica se alcanzó este tiempo antes que la convergencia indicada. No obstante, el valor final obtenido para la convergencia fue de 0.008 y se consideró que era lo suficientemente pequeño. Los valores de la energía cinética y la convergencia del modelo en función del tiempo se muestran en la figura 5.7.

Capitulo 5
218
Fig. 5.7: Energía cinética y convergencia del modelo, ambas durante la primera fase de
cálculo: relajación dinámica.
La gravedad se aplica de forma progresiva desde valor inicial nulo hasta
el valor total de la gravedad en el instante 0.001 s; a partir de ese momento se mantiene constante hasta el final del cálculo. En la segunda fase del cálculo esta curva se mantiene constante y en su valor máximo desde el inicio y hasta el final.
La tensión de las barras del bastidor se aplica a través del pretensado de los elementos tipo BEAM que las forman. Esta carga de pretensado se aplica siguiendo una rampa que alcanza su valor máximo en el instante 0.1 s.
En cuanto a las simulaciones estáticas, el tipo de cálculo recomendado es el implícito; no obstante, dado que el modelo material para el hormigón no soporta este tipo de cálculo, se ha realizado un cálculo explícito, tanto para la precarga como para el cálculo correspondiente a la carga estática horizontal. Como en este caso no es necesario introducir ningún elemento nuevo en el modelo, los dos cálculos pueden estar enlazados, de forma que, una vez alcanzada la precarga, se inicia automática el segundo cálculo.
5.1.7. CONTACTOS
En general, en el código LSDYNA, un contacto se define identificando dos partes del modelo que van a entrar en contacto; a esas partes se las llama “slave” y “master”. Los nodos pertenecientes a la parte “slave” son comprobados en cuanto a su posible penetración a través de las superficies

Nuevo modelo de elementos finitos
219
que componen la parte “master”. Además, se utiliza un algoritmo de contacto con el que se determina la rigidez en el contacto y la fuerza de contacto. Para ello se utilizan las propiedades de los materiales y el tamaño de la superficie de contacto. Este tipo de algoritmos se llaman “de penalización”, ya que aumentan el módulo elástico del material “master” una vez la penetración se ha detectado con el fin de evitar el avance de esa penetración y, por tanto, simular el contacto entre los materiales.
En este modelo se han utilizado dos algoritmos de contacto de penalización: AUTOMATIC_SINGLE_SURFACE y AUTOMATIC_ _SURFACE_TO_SURFACE. Los contactos “automáticos” son muy utilizados en impactos de vehículos porque son capaces de detectar el contacto cuando se produce por cualquier cara de una superficie; es decir, son no orientados. Esta particularidad es muy útil en estos casos, ya que, cuando se produce el impacto de un vehículo, las deformaciones pueden ser muy grandes y, por tanto, el conocimiento previo sobre los lados de las superficies sobre las que se van a producir todos los contactos puede ser prácticamente imposible.
Por otra parte, el contacto tipo SINGLE_SURFACE presenta la ventaja de que únicamente hay que definir las partes “slave”. El programa controla la penetración entre todas las superficies que componen esta parte. Para este contacto se definió todo el modelo (pilar, bastidor y vehículo) como parte “slave”.
No obstante, si se desea obtener la fuerza de contacto entre dos partes que van a chocar, es necesario definir otro tipo de contacto más avanzado, ya que el anterior no es capaz de determinar esta característica. Para ello se utilizó el contacto tipo SURFACE_TO_SURFACE, con el que las penetraciones se comprueban en los dos sentidos entre las superficies pertenecientes a las partes “slave” y “master”. Cuando se detecta una penetración entre ellas se calculan las fuerzas de contacto y se almacenan en el archivo de resultados. Para este tipo de contacto se definió el coche entero como parte “slave” y el pilar junto con el bastidor como “master”.

Capitulo 5
220
5.2. MODELOS DE ELEMENTOS FINITOS UTILIZADOS COMO VEHÍCULOS
Además del modelo de vehículo utilizado en las simulaciones previas, se han seleccionado dos más con el fin de obtener información acerca de la variación en el tipo de vehículo, además de en el cambio de masa sobre un mismo vehículo. Con ello los vehículos utilizados son los que se describen en la tabla 5.7, cuya visualización se da en la figura 5.8. Además, en la figura 5.9 se muestra una imagen del vehículo real en el que están basados cada uno de estos modelos.
Tabla 5.7: Características de los modelos utilizados Nombre PICKUP PICKUP C METRO NEON
Masa (kg) 1800 3000 800 1316 Nº Elementos 10500 10501 16260 270768
Marca Chevrolet Chevrolet Suzuki Chrysler Año construcción 1973-1989 1973-1989 1998-2001 1995-2005
Año modelo 1994 1994 2000 2006
Figura 5.8: Modelos de vehículos utilizados; de izquierda a derecha: PIKCUP, METRO y NEON
Figura 5.9: Vehículos reales en los que están basados los modelos; de izquierda a derecha:
PIKCUP, METRO y NEON
Además, la Universidad de George Washington (USA) ha realizado pruebas con algunos de estos modelos consistentes en someter al vehículo real a ensayos de impacto frontal contra un muro rígido a una velocidad de 60 km/h, y sus resultados comparados con los correspondientes al mismo ensayo

Nuevo modelo de elementos finitos
221
realizado con su modelo. La información obtenida tras estas pruebas está disponible en el Anexo 2 de esta memoria.
5.3. AJUSTE DEL MODELO DINÁMICO
5.3.1. INTRODUCCIÓN Y OBJETIVOS
Teniendo en cuenta los resultados obtenidos en los ensayos, descritos en el capítulo 4, se tomarán como referencia los tres últimos impactos realizados, dado que las frecuencias obtenidas entre ellos no varían, por lo que las tensiones iniciales tanto en las barras de tesado como en el hormigón son las mismas en los tres impactos. En los ensayos anteriores se midieron frecuencias superiores, lo que indica tensiones mayores en barras de tesado y hormigón. Con el fin de tener la mayor información posible para el ajuste del modelo, se han tomado los últimos tres impactos como referencia.
Durante la realización de estos ensayos el axil en cada barra era de 151 kN, lo que supone una tensión en cada barra de 148.35 MPa y una fuerza resultante sobre el hormigón de:
151 (27) 4 538 F cos kN
Con ello tenemos una tensión en el hormigón de 6.15 MPa. Además, en estos ensayos se determinó que la frecuencia característica del pilar era de 17.3 Hz.
Por otra parte, en el impacto realizado con un vehículo de 830 kg y con una velocidad en el momento del impacto de 20 km/h, el desplazamiento en el punto 3 (situado a 1.3 m de altura sobre la base del pilar) resultó de 1.3 mm.
Por tanto, se establecen estos datos como el objetivo del ajuste del modelo; es decir, se considerará que el modelo está ajustado cuando cumpla simultáneamente todos los requisitos establecidos en la tabla 5.8. Para ello

Capitulo 5
222
será necesario variar las condiciones de contorno, tensión en las barras, módulo elástico y densidad del hormigón, dentro de valores razonables.
Tabla 5.8 Valores objetivo para el ajuste del modelo PARÁMETRO VALOR
Axil por barra 151 (kN) Tensión hormigón 6.15 (MPa) Frecuencia característica 17.3 (Hz) Desplazamiento a 1.3 m de altura en impacto a 20 km/h con vehículo de 830 kg 1.3 (mm)
El axil por barra se consigue con la precarga, con la que además se
incorpora la gravedad. Imponiendo una tensión por barra de 148.35 MPa durante esta parte del cálculo, se obtienen los valores para axil por barra y tensión del hormigón establecidas en la tabla 5.8, tal como se ve en la figura 5.10.
Fig. 5.10: Fuerza axil en las barras de tesado tras la relajación dinámica (N) (izquierda) y
Tensión normal en dirección vertical en el hormigón tras la relajación dinámica (MPa) (derecha).
A partir de estos resultados se utiliza esta precarga para obtener la frecuencia y el desplazamiento en la parte dinámica del cálculo. Las frecuencias se obtendrán a partir de un cálculo modal y el desplazamiento como uno de los resultados del impacto del vehículo sobre el pilar. Como parámetros variables para el ajuste tomaremos las restricciones externas del

Nuevo modelo de elementos finitos
223
pilar y su placa de anclaje, el módulo de elasticidad del hormigón y la densidad del hormigón.
5.3.2. AJUSTE DEL MODELO A PARTIR DE ANÁLISIS MODAL Y ANÁLISIS
DINÁMICO DEL IMPACTO
Una vez precargada la estructura, se inicia el proceso de ajuste del
modelo, con los valores objetivos dados en la tabla 5.8 para la frecuencia y el desplazamiento. Para ello, los parámetros a variar son el módulo de elasticidad, la densidad del hormigón y las condiciones de contorno de la base del pilar, entendiendo como tal las restricciones al movimiento de los nodos situados en la base de la placa de anclaje. Para ello es necesario conocer la influencia de cada una de estas variables en los resultados a conseguir.
Con el fin evaluar las frecuencias propias del pilar se ha realizado un análisis modal, con el que además se ha determinado el movimiento ligado a cada una de estas frecuencias. Para la primera frecuencia, el movimiento asociado es una flexión del pilar en el eje débil del mismo (figura 5.11). Este movimiento coincide con el que el vehículo provocará sobre la estructura, por lo que será este modo de vibración el que resulte excitado principalmente durante el impacto. Además, el segundo modo propio es una torsión del pilar y los siguientes sólo implican movimiento en las barras de tesado; por tanto, ninguno de estos modos de vibración tendrá una gran importancia en cuanto al movimiento causado por el impacto.

Capitulo 5
224
Fig. 5.11: Primer y último instante del movimiento asociado al primer modo de vibración
de la estructura
Utilizando este análisis modal, se han realizado diferentes cálculos con variaciones en el módulo de elasticidad y en la densidad del hormigón, con el fin de estudiar su influencia en la frecuencia característica. Los resultados (figura 5.12) muestran que el aumento del módulo de elasticidad aumenta el valor de esta frecuencia, lo que resulta lógico ya que se está dotando a la estructura de una mayor rigidez al movimiento. La disminución de la densidad ha dado lugar a un aumento proporcional de las frecuencias correspondientes a cada módulo de elasticidad. Este aumento se explica por la disminución de masa del modelo, lo que disminuye su inercia y le permite realizar los ciclos en menos tiempo. En la figura 5.12 se muestran estos resultados calculados para una densidad de 2500 kg/m3, tomada como característica del hormigón y para 2000 kg/m3, que consideramos sería la menor razonablemente admisible. Además se ha dibujado la recta correspondiente a la frecuencia que se ha marcado como objetivo (17.3 Hz), con lo que el módulo elástico del hormigón se situaría entre un valor de 23000 MPa y 37000 MPa.

Nuevo modelo de elementos finitos
225
20000 25000 30000 35000 40000 45000 5000016.416.616.817.017.217.417.617.818.018.218.418.618.8
Frec
uenc
ia (H
z)
Módulo elástico (MPa)
Densidad 2500 kg/m3 Densidad 2000 kg/m3
Frecuencia objetivo
Fig. 5.12: Variación de la frecuencia con el módulo elástico y con la densidad del hormigón
Para determinar completamente el módulo elástico utilizaremos la última condición que debe cumplir el modelo: el desplazamiento máximo obtenido como consecuencia del impacto de un vehículo de masa 830 kg a una velocidad de 20 km/h. Para ello utilizaremos el modelo de vehículo METRO que, con una masa de 800 kg es el que tiene una masa más cercana a la necesaria. Con ello, y a través del modelo dinámico, se han obtenido los desplazamientos máximos en el pilar correspondientes a diferentes módulos elásticos del hormigón, para un impacto a 20 km/h. Los resultados se han comparado con el desplazamiento objetivo (1.3 mm). Además, en estas simulaciones se han tomado densidades comprendidas entre los valores de 2500 kg/m3 y 2000 kg/m3 con el fin de abarcar el mismo intervalo tomado para la frecuencia. El resultado de este análisis se muestra en la figura 5.13, en la que se observa que el aumento de la masa disminuye los desplazamientos máximos del pilar, por lo que el intervalo en el que se sitúa el módulo de elasticidad se encuentra comprendido entre 15000 MPa y 23000 MPa.

Capitulo 5
226
10000 15000 20000 25000 300000.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
Densidad 2500 kg/m3 Densidad 2000 kg/m3
Desplazamiento objetivo
Des
plaz
amie
nto
diná
mic
o (m
m)
Módulo elástico (MPa) Fig. 5.13: Variación del máximo desplazamiento en el pilar, provocado por el vehículo METRO
en un impacto a 20 km/h, en función del módulo elástico del hormigón
Como conclusión a los cálculos realizados, hemos obtenido que el módulo de elasticidad debe situarse en cada uno de los intervalos: [15000 MPa, 22600 MPa] y [23000 MPa, 37000 MPa], correspondientes a densidades situadas entre [2500 kg/m3, 2000 kg/m3] respectivamente en el primer caso y [2000 kg/m3, 2500 kg/m3] respectivamente en el segundo; para cumplir tanto la condición de frecuencia como la de desplazamiento (figura 5.14).
Fig. 5.14: Intervalos (módulo elástico y densidad correspondiente) resultantes para el ajuste
Dado que la intersección entre estos intervalos es un conjunto vacío, se ha optado por tomar el valor medio entre los extremos más cercanos, correspondientes ambos a una densidad de 2000 kg/m3. Este valor medio resulta de 22800 MPa.
En cuanto a las restricciones de la base, hay que tener en cuenta que todos los cálculos realizados para el ajuste se han realizado con todos los desplazamientos impedidos en todos los nodos de la cara inferior de la placa

Nuevo modelo de elementos finitos
227
de anclaje. Si liberamos algunos de estos nodos, permitiendo su movimiento en la dirección vertical, la frecuencia propia del pilar bajaría, con lo que el intervalo en el que el módulo elástico es válido (figura 5.12) aumentaría de valor y con este mayor módulo elástico tendríamos un intervalo más alejado del necesario para conseguir el desplazamiento objetivo.
Por tanto, los valores definitivos para el módulo elástico y la densidad del hormigón son los que se muestran en la tabla 5.9. Estos valores, determinados a partir del ajuste del modelo dinámico, definen completamente el modelo material para el hormigón, junto con los mostrados en la tabla 5.6.
Tabla 5.9 Valores determinados a partir del ajuste del modelo dinámico
Parámetro Valor Módulo de elasticidad lineal 22800 (MPa)
Densidad 2500 (kg/m3)


229
CAPÍTULO 6. RESULTADOS OBTENIDOS
6.1. PRECISIÓN DE LOS RESULTADOS
En la resolución de problemas de elementos finitos es frecuente utilizar métodos simplificados de integración, con los que se reducen los puntos de integración del elemento. En este sentido, la simplificación más potente es la que únicamente toma 1 punto de integración en el elemento. Esta simplificación permite reducir el tiempo de cálculo; no obstante, también genera problemas que es necesario afrontar. El más importante es la aparición de modos de deformación irreales que no generan tensiones ni deformaciones. Las ondas generadas por estos modos de deformación tienen sus nodos coincidentes con los nodos de los elementos, de forma que el aspecto de la malla deformada es tal como se muestra en la figura 6.1. Este aspecto, que recuerda a los relojes de arena, le ha dado el nombre de “hourglassing”.
Fig. 6.1: Ejemplo de hourglassing. Derecha: mallado original; izquierda: mallado
resultante tras el cálculo en el que se observa el hourglassing [ANSYS LS-DYNA, 2004].

Capitulo 6
230
Este problema puede ser resuelto de varias maneras; la manera más directa es utilizar todos los puntos de integración del elemento. Este método ha sido utilizado en todas las partes que forman el pilar y el bastidor, de forma que, además de evitar el hourglassing se obtienen resultados con mayor precisión en los elementos de los que queremos obtener tensiones y deformaciones. Para las partes que forman el vehículo se ha mantenido la integración en un sólo punto; en primer lugar porque tienen mayor número de elementos y una integración completa del elemento aumentaría dramáticamente el tiempo de cálculo, y en segundo lugar porque la integración completa del elemento es mucho más inestable para grandes deformaciones, como las que va a experimentar el vehículo. Otra forma de reducir el hourglassing es disminuyendo el tamaño de los elementos, pero esto incrementa el número de elementos y por tanto también el tiempo de cálculo.
Para evitar este efecto sin necesidad de aumentar el tiempo de cálculo excesivamente, LSDYNA tiene implementados una serie de algoritmos con los que se trata de paliar el efecto. De cualquier manera, es necesario realizar un control de conservación de energías en el modelo, con el fin de determinar si el tamaño de la malla del vehículo y el algoritmo utilizado para el control del hourglassing han sido apropiados. La conservación de energía en el modelo implica que la energía cinética inicial del vehículo será transformada en energía interna almacenada en forma de deformación del vehículo y del pilar, energía residual cinética, energía perdida por fricción y energía perdida por hourglassing. Además, se recomienda que la energía debida al hourglassing en el tiempo correspondiente al pico de fuerza sea inferior al 10% de la energía total [LSDYNA, 2006].
En todas las simulaciones se comprobó que la energía se conserva, por lo que los errores numéricos han sido suficientemente pequeños. Además, la energía debida al hourglassing ha sido suficientemente pequeña, tanto en el instante correspondiente al pico de carga, como en el rebote del vehículo. El rebote del vehículo se ha establecido cuando la fuerza de contacto baja al 1% del pico alcanzado. Como ejemplo del análisis de energía realizado, en la

Resultados obtenidos
231
figura 6.2 se muestra el balance de energías, así como los valores de la relación de energía debida al hourglassing respecto de la total, tanto para el instante correspondiente al pico de fuerza como para el rebote. En el instante correspondiente al pico de fuerza, esta relación es del 7.1 %, menor que el 10 % considerado como límite, y para el instante correspondiente al rebote, es del 9.8 %, valor no excesivamente grande comparado con el 17 % que se indica en los resultados obtenidos por Zaouk et al. [Zaouk, 1996] para el estudio del comportamiento de este modelo de vehículo en impacto frontal, y que fue considerado como un buen resultado.
Fig. 6.2: Evolución de las energías para el impacto correspondiente al vehículo PICKUP
con velocidad 20 km/h
6.2. RELAJACIÓN DINÁMICA
Durante la relajación dinámica las barras de tesado alcanzaron una carga de 151 kN, con lo que la tensión en el hormigón resultó de 6.12 MPa, tal como se esperaba según se ha descrito en el capítulo 5. Estas tensiones han servido para inicializar la estructura, de forma que se alcanza este estado precargado a través de 100 pasos en los que los valores de desplazamientos, rotaciones y temperaturas nodales aumentan linealmente hasta los valores alcanzados en la precarga. Esta actualización se produce sobre un nuevo modelo que ya incluye el vehículo, con lo que se inicia el cálculo del impacto. En las simulaciones estáticas el cálculo se puede reiniciar automáticamente ya que no se incorporan elementos nuevos al modelo.
Pic
o fu
erza
Reb
ote
H/T
= 7.
1 %
H/T
= 9.
8 %

Capitulo 6
232
6.3. SIMULACIONES ESTÁTICAS
Con el modelo del bastidor y pilar descritos en el capítulo 5 se han realizado cálculos estáticos con cargas horizontales de valores comprendidos entre 50 y 700 kN. Estas cargas se han aplicado como fuerzas superficiales para cada uno de los elementos situados en la banda comprendida entre 375 mm y 625 mm de altura, de forma que su centro esté a una altura de 500 mm, tal como se establece en el Eurocódigo 1 [EC1-1-7, 2003]. En la figura 6.3 esta carga se ha representado por medio de unas pequeñas flechas negras en la cara posterior del pilar.
Tensiones (daño en el hormigón)
En general, tras el cálculo realizado, cada punto del pilar estará sometido a un estado tridimensional de tensiones, que se puede descomponer en su parte hidrostática y desviadora. No obstante, estas tensiones, por sí mismas no proporcionan una idea de lo cerca o lejos que se encuentra cada punto de su fisura o aplastamiento, parámetro que llamamos “daño” del hormigón. Es necesario combinar las tensiones existentes con un criterio dado para evaluar el daño en el hormigón. El criterio elegido, así como todos los detalles del comportamiento del modelo de hormigón elegido se describieron ya en el capítulo 5, por lo que se remite al lector a este capítulo para una descripción completa del funcionamiento del modelo material así como de los parámetros que lo definen. En la figura 6.3 se muestran las áreas afectadas por el daño en el pilar para las simulaciones más representativas. En todos los casos se muestra la zona más dañada, que se corresponde con la cara opuesta a la que se aplica la carga. Además se ha representado el daño frágil y dúctil en la misma figura. Cualquier zona coloreada indica deformaciones plásticas, bien sean de compresión o de tracción; y por tanto, un hormigón dañado. Hasta 120 kN de carga el hormigón no resulta dañado; a partir de ese valor el daño se va extendiendo y aumentando de intensidad hasta que, para

Resultados obtenidos
233
una carga de 700 kN el pilar resulta prácticamente dividido en dos partes. En la figura 6.4 se muestra un detalle de esta rotura.
Con el fin de conocer el estado de la sección más dañada en cada una de estas simulaciones, se ha realizado un corte por esta sección y se ha representado en ella el daño (figura 6.5). Para 120 kN la zona dañada es muy reducida y no afecta a la capacidad resistente de la sección. A medida que se aumenta la carga aplicada la zona dañada aumenta, de manera que para 200 kN este área abarca ya prácticamente la mitad de la sección y para 466 kN ha alcanzado casi toda la sección.
Fig. 6.3: Daño en el hormigón para las simulaciones estáticas correspondientes a cargas de 120
kN, 200 kN, 250 kN, 350 kN, 466 kN y 700 kN, correspondientemente.
CARGA ESTÁTICA APLICADA EN LA CARA POSTERIOR A LA VISTA

Capitulo 6
234
Figura 6.4: Detalle de la rotura para carga estática de 700 kN.
Figura 6.5: Daño en la sección más desfavorable, para cargas estáticas de 120 kN, 200 kN, 350
kN y 466 kN, respectivamente (de izquierda a derecha y de arriba a abajo)

Resultados obtenidos
235
Desplazamientos
Los desplazamientos correspondientes al eje, para cada carga estática aplicada son los que se muestran en la figura 6.6. En primer lugar se observa que los desplazamientos en la cabeza del pilar son prácticamente inexistentes. En cuanto a la forma general de las curvas, estas muestran un desplazamiento en el sentido de aplicación de la carga que aumenta con el valor de ésta, como era de esperar. Para la curva correspondiente a 700 kN se observa una zona apuntada, que se corresponde con la rotura mostrada en la figura 6.4.
Fig. 6.6: Deformadas del eje del pilar para diferentes cargas estáticas aplicadas.
Los desplazamientos máximos del pilar correspondientes a cada carga se detallan en la tabla 6.1. Se observa que la posición del punto con máximo desplazamiento se mantiene mientras el pilar trabaja dentro del rango elástico y se desplaza hacia la base conforme avanza el daño en el hormigón hasta situarse en el entorno en el que se ha aplicado la carga.

Capitulo 6
236
Tabla 6.1: Desplazamiento máximo del pilar y localización del punto correspondiente para cada simulación estática (sombreado en gris el intervalo de rango elástico)
Carga estática aplicada (kN)
Desplazamiento máximo (mm)
Altura sobre la base (mm)
50 0.572 100
75 0.856 100
100 1.186 100
120 1.408 975
200 2.584 875
250 3.443 825
350 5.538 726
466 10.073 504
700 27.136 478
En la figura 6.7 se han representado estos desplazamientos del pilar en función de la carga estática aplicada y se ha marcado la zona en la que el pilar cambia de régimen elástico a plástico; este límite se ha establecido como la carga para la que el pilar empieza a experimentar daño en la cara posterior a la que se ha aplicado la carga.
0 100 200 300 400 5000
5
10
15
ZONA ELÁSTO-PLÁSTICA
Des
plaz
amie
nto
máx
imo
en e
l pila
r (m
m)
Carga estática (kN)
ZONA ELÁSTICA
Fig. 6.7: Desplazamientos máximos del pilar para diferentes cargas estáticas aplicadas.

Resultados obtenidos
237
6.4. SIMULACIONES DINÁMICAS
Deformaciones en los vehículos
Tras el impacto los vehículos mostraron deformaciones permanentes (figura 6.8) con los valores dados en la tabla 6.2. En la figuras 6.9 y 6.10 se han representado estos valores en función de la velocidad de impacto, tanto para la deformación máxima experimentada (elástica + plástica) en el momento de máxima fuerza de contacto, como para la permanente (plástica), obtenida tras la recuperación de la deformación elástica.
Fig. 6.8: Estado final de los vehículos tras el impacto a 20 km/h
Tabla 6.2: Deformaciones experimentadas por los vehículos en cada simulación
Simulación Máxima deformación (mm) Deformación permanente (mm)
METRO – 10 km/h 262 52
METRO – 20 km/h 498 176
METRO – 25 km/h 524 185
METRO – 30 km/h 540 271
NEON – 10 km/h 87 0
NEON – 20 km/h 250 43
NEON – 25 km/h 296 110
NEON – 30 km/h 367 159

Capitulo 6
238
PICKUP – 10 km/h 218 57
PICKUP – 20 km/h 507 344
PICKUP – 25 km/h 628 519
PICKUP – 30 km/h 623 606
PICKUP C – 10 km/h 217 73
PICKUP C – 20 km/h 508 427
PICKUP C – 25 km/h 610 537
PICKUP C – 30 km/h 646 614
10 15 20 25 30
0
100
200
300
400
500
600
Def
orm
ació
n pe
rman
ente
en
el v
ehíc
ulo
(mm
)
Velocidad (km/h)
SIMULACIONES METRO (800 kg) NEON (1300 kg) PICKUP (1800 kg) PICKUP C (3000 kg)
ENSAYOS Renault 19 Chamade (1085 kg) Seat Málaga (975 kg) Fiat Punto (830 kg) Seat Ibiza (800 kg) Ford Escort (977 kg)
Fig. 6.9: Deformaciones permanentes experimentadas por los vehículos en las simulaciones y comparación con las obtenidas en los ensayos a 20 km/h
10 15 20 25 30
0
100
200
300
400
500
600
Def
orm
ació
n m
áxim
a en
el
veh
ícul
o (m
m)
Velocidad (km/h)
SIMULACIONES METRO (800 kg) NEON (1300 kg) PICKUP (1800 kg) PICKUP C (3000 kg)
Fig. 6.10: Deformaciones máximas experimentadas por los vehículos en las simulaciones
En general, para velocidades mayores, las deformaciones permanentes en los vehículos (figura 6.9) aumentan en una progresión aproximadamente

Resultados obtenidos
239
lineal. No obstante, la rapidez con que se incrementa esa deformación con la velocidad es mayor para el PICKUP y PICKUP Cargado (en adelante PICKUP C) que para los otros dos vehículos. En principio podría parecer que estas diferencias se deben a la mayor masa de los vehículos PICKUP; sin embargo, no se cumple esta relación para el vehículo NEON que, con una masa intermedia, tiene las deformaciones plásticas más bajas.
Para analizar el comportamiento de este modelo, se ha realizado una comparación con el modelo METRO en cuanto a los parachoques delanteros ya que, para bajas velocidades, como las que estamos tratando, el papel de este elemento es fundamental, mientras que el resto de elementos amortiguadores tienen un papel secundario. En la figura 6.11 se muestran los parachoques delanteros para estos dos vehículos, sin la cubierta metálica que lo cubre y sin el capó de los vehículos, para tener una mejor visión de la estructura de cada coche.
Fig. 6.11: Parachoques delantero de los vehículos METRO (izquierda) y NEON (derecha)
Se observa en esta figura que la estructura interna que acompaña al parachoques en el NEON es bastante más compleja que en el METRO. Además, el espesor del parachoques en el NEON también es mayor que en el METRO. Si analizamos los materiales de que están formados cada uno de ellos, resulta que el parachoques del NEON está modelado con un material tipo “espuma deformable”, con un módulo elástico de sólo 30 MPa, mientras que en el caso del METRO, el material utilizado es elasto-plástico con módulo

Capitulo 6
240
elástico de 138000 MPa. Estas características hacen que el modelo NEON tenga un comportamiento mucho más complejo que el METRO y que, a pesar de tener mayor masa, experimenta menores deformaciones para un impacto con la misma velocidad inicial.
Por otra parte, si analizamos la estructura completa los vehículos comprobamos que se pueden clasificar en función de su chasis y su carrocería. El chasis es la estructura que sostiene y aporta rigidez al vehículo y, en general, está compuesto por largueros y travesaños. La carrocería es el armazón del vehículo formado por planchas metálicas unidas entre sí, cuyo interior forma el habitáculo de los pasajeros o la mercancía. Los vehículos se pueden clasificar en función de las relaciones entre chasis y carrocería, de forma que encontramos los que tienen la carrocería y el chasis separados, las carrocerías autoportantes o monocascos y las carrocerías con plataforma de chasis. El sistema de carrocería independiente es el sistema más antiguo y más sencillo; en este sistema la carrocería va atornillada al chasis con la ayuda de juntas de caucho. Estructuralmente estos vehículos tienen el comportamiento de su chasis, por lo que frente a impactos frontales el vehículo se comporta como una viga que recibe un impacto de forma longitudinal. Este comportamiento se ve ligeramente modificado por la existencia del parachoques delantero y el motor, disipando energía el primero y aumentando la transmisión de energía radicalmente cuando el choque alcanza el segundo. El vehículo utilizado en este trabajo PICKUP es un ejemplo de carrocería y chasis separados. El sistema de carrocería autoportante es aquella en la que el bastidor y la carrocería forman parte de una misma estructura. Este tipo de vehículos tienen un comportamiento estructural bastante más complejo que los anteriores, ya que toda la carrocería colabora en la redistribución de tensiones. Además, estos vehículos disponen de zonas de la carrocería debilitadas por medio de taladros, arrugas, disminución de secciones o largueros cónicos, con el fin de que durante un impacto frontal se produzca una embutición sobre ellos mismos, con una gran cantidad de energía disipada, pero con una deformación pequeña que no alcance la zona de pasajeros. Los vehículos METRO y NEON utilizados en

Resultados obtenidos
241
este trabajo son ejemplos de este tipo de vehículos. Además existen otros medios destinados a disipar energía, como la deformación de la parte delantera del vehículo en una dirección prefijada para provocar el desplazamiento hacia un lado o el hundimiento del motor. Con ello se trata de evitar el gran incremento de energía que provoca el impacto del motor. Esta característica se puede observar en el vehículo NEON, lo que, junto con sus particulares características amortiguadoras (figura 6.11), modifica sustancialmente su comportamiento, permitiendo que se disipe gran cantidad de energía con una deformación menor que el resto de los vehículos, con lo que se preserva el habitáculo del conductor.
Por otra parte, si comparamos las deformaciones permanentes obtenidas en las simulaciones con las que se midieron en los ensayos (figura 6.9), vemos que, teniendo en cuenta la masa de cada vehículo, las que se midieron en los ensayos son significativamente superiores a las obtenidas en las simulaciones. Las deformaciones plásticas medidas en los ensayos para un vehículo con masa situada entorno a 800 kg (Fiat Punto y Seat Ibiza) son aproximadamente de unos 265 mm, mientras que el resultado de la simulación con un vehículo de esa misma masa (METRO) ha sido de 176 mm, todos ellos para la misma velocidad de impacto. Esto significa que los vehículos reales han sido más plásticamente deformables que los utilizados en las simulaciones. No obstante, hay que tener en cuenta que la energía que se disipa en forma de deformaciones plásticas en un tipo particular de coche, puede estar acumulada en deformaciones elásticas (que se recuperan tras el rebote) en otro tipo de coche con un comportamiento más elástico. Por tanto, la magnitud realmente interesante para evaluar el intercambio de energías es la deformación total del vehículo, ya que la energía que se transmita será la inicial cinética del vehículo menos la suma de las elásticas y plásticas del vehículo. Dado que esta deformación total en el vehículo no ha sido registrada en los ensayos, no es posible establecer una comparación entre este tipo de deformaciones. Además, hay que tener en cuenta que todos los vehículos ensayados son de fabricación europea, mientras que todos los modelos están basados en vehículos americanos, por lo que resulta difícil comparar su

Capitulo 6
242
comportamiento. A pesar de estas dificultades, dado que estos modelos para los vehículos han sido calibrados a través de ensayos de impacto (ver Anexo 2) y son utilizados y aceptados por un amplio número de investigadores, consideraremos que su comportamiento es bueno.
Tensiones (daño en el hormigón)
Como consecuencia del impacto aparece un estado tridimensional de tensiones en todos los puntos del hormigón. Tal como se ha hecho en la descripción de los resultados estáticos, se muestran las áreas afectadas por el daño en el pilar para las simulaciones más representativas en las figuras 6.12 a 6.15. En todos los casos se muestra la zona más dañada, que en unos casos es la que recibe el impacto y en otros es la cara posterior. Además se ha representado el daño frágil y dúctil en la misma figura. Cualquier zona coloreada indica deformaciones plásticas, bien sean de compresión o de tracción; y por tanto, un hormigón dañado.
Para los vehículos NEON y METRO (figuras 6.12 y 6.13) el daño no va más allá de las esquinas que entran en contacto con el vehículo durante el impacto. La diferencia entre diferentes velocidades en estos dos vehículos es únicamente el tamaño de esta zona, sin llegar nunca a afectar a la zona central de la sección.
Para el vehículo PICKUP (figura 6.14) el cambio en la velocidad es más significativo, de forma que para una velocidad de 30 km/h la mayor parte de la cara posterior al impacto resulta dañada. La diferencia entre este vehículo y el PICKUP C (figura 6.15) no resulta significativa; únicamente se observa una mayor intensidad del daño en algunas zonas en este último caso.
Tal como se hizo con los resultados estáticos, se ha realizado un corte por la sección más dañada con el fin de determinar el alcance del daño en ella. Para el PICKUP (figura 6.16) el daño correspondiente a 20 km/h es únicamente localizado, mientras que para 25 km/h aproximadamente la

Resultados obtenidos
243
mitad de la sección se encuentra afectada. Para 30 km/h la zona dañada es mayor que la mitad de la sección. Los resultados obtenidos para el PICKUP C (figura 6.17) son muy similares a los obtenidos para el PICKUP. Este incremento del daño a partir de velocidades superiores a 20 km/h se debe a que la deformación en el vehículo alcanza al motor, impactando contra el pilar. Dado que se trata de un sólido perfectamente rígido, este impacto provoca un aumento considerable de la energía transmitida al pilar.
Fig. 6.12: Daño en el hormigón (cara correspondiente al impacto y zona adyacente a la base)
para impacto con el vehículo METRO y velocidades de 10, 20 y 30 km/h, respectivamente (de izquierda a derecha).
Fig. 6.13: Daño en el hormigón (cara correspondiente al impacto y zona adyacente a la base) para impacto con el vehículo NEON y velocidades de 10, 20 y 30 km/h, respectivamente (de
izquierda a derecha).

Capitulo 6
244
Fig. 6.14: Daño en el hormigón (cara posterior al impacto) para impacto con el vehículo PICKUP y velocidades de 20, 25 y 30 km/h, respectivamente (de izquierda a derecha).
Fig. 6.15: Daño en el hormigón (cara posterior al impacto) para impacto con el vehículo
PICKUP CARGADO y velocidades de 20, 25 y 30 km/h, respectivamente (de izquierda a derecha).

Resultados obtenidos
245
Fig. 6.16: Daño en la sección más dañada, para los impactos correspondientes al vehículo PICKUP con velocidades de 20, 25 y 30 km/h, respectivamente (de izquierda a derecha).
Fig. 6.17: Daño en la sección más dañada, para los impactos correspondientes al vehículo
PICKUP CARGADO con velocidades de 20, 25 y 30 km/h, respectivamente (de izquierda a derecha).
Fuerzas en el contacto
La determinación de las fuerzas en el contacto, en función del tiempo, resulta de gran interés, ya que posibilitan el cálculo del impacto sin necesidad de utilizar los complejos modelos de vehículos. Teniendo en cuenta que alguno de los modelos de vehículos utilizados en este trabajo tiene 270000 elementos (diez veces más que el modelo del pilar y bastidor) resulta fácil comprender que la eliminación del vehículo de las simulaciones reduce en gran medida el tiempo de cálculo que, para estos complejos vehículos puede ser de varios días, mientras que para el pilar es prácticamente instantáneo.
Las fuerzas obtenidas para cada vehículo se muestran en la figura 6.18, en función de la velocidad de impacto. La forma general de las curvas es

Capitulo 6
246
triangular, con el máximo situado aproximadamente en el centro de la curva. Para todos los vehículos se observa una tendencia creciente del valor máximo con la velocidad, así como una disminución del tiempo transcurrido desde el inicio del contacto hasta que se alcanza ese máximo. Las características principales de estas fuerzas de contacto, duración del contacto, tiempo transcurrido hasta que se alcanza el punto de máxima fuerza y máxima fuerza de contacto obtenida, se detallan en la tabla 6.3.
Fig. 6.18: Fuerzas en el contacto para cada vehículo y velocidad.
Tabla 6.3: Características principales de las fuerzas de contacto Simulación Duración del
contacto (s)
Tiempo hasta el
máximo (s)
Máxima fuerza de
contacto (kN)
METRO – 10 km/h 0.170 0.100 15.7
METRO – 20 km/h 0.158 0.072 49.0
METRO – 25 km/h 0.135 0.058 61.4
METRO – 30 km/h 0.127 0.061 71.4
NEON – 10 km/h 0.141 0.063 6.5
NEON – 20 km/h 0.176 0.034 12.9
NEON – 25 km/h 0.145 0.051 23.7

Resultados obtenidos
247
NEON – 30 km/h 0.127 0.056 27.4
PICKUP – 10 km/h 0.231 0.021 40.8
PICKUP – 20 km/h 0.177 0.133 105.1
PICKUP – 25 km/h 0.165 0.114 180.9
PICKUP – 30 km/h 0.137 0.089 289.7
PICKUP C – 10 km/h 0.305 0.031 41.73
PICKUP C – 20 km/h 0.245 0.153 98.29
PICKUP C – 25 km/h 0.237 0.122 171.9
PICKUP C – 30 km/h 0.186 0.102 288.5
Las máximas fuerzas en el contacto (figura 6.19) son muy similares para los vehículos PICKUP y PICKUP C, por lo que el aumento de la masa de uno de los vehículos no ha tenido influencia en la máxima fuerza de contacto. No obstante, resulta claro que para estos dos vehículos las cargas máximas han sido muy superiores a las obtenidas con el resto de vehículos, sin duda debido a su chasis independiente. En principio podría parecer que vehículos con mayor masa conducen a fuerzas de contacto mayores; sin embargo, el NEON, con una masa de 1300 kg tiene las menores cargas registradas. Esto se debe a las particulares características amortiguadoras de este vehículo, que dispone de un sistema de amortiguación más evolucionado que el METRO lo que le permite transmitir menor cantidad de energía a pesar de tener una masa mayor.
10 15 20 25 300
50
100
150
200
250
300
Máx
ima
fuer
za c
onta
cto
(kN
)
Velocidad (km/h)
METRO (800 kg) NEON (1300 kg) PICKUP (1800 kg) PICKUP C (3000 kg)
Fig. 6.19: Variación de la fuerza de contacto en función de la velocidad de impacto.

Capitulo 6
248
Las duraciones de los contactos (figura 6.20) disminuyen con la velocidad, salvo en el caso del NEON en el que se mantienen aproximadamente constantes. En el capítulo 5 se describieron las duraciones de contacto registradas experimentalmente; para una velocidad de 20 km/h las duraciones de contacto fueron aproximadamente de 150 ms, para vehículos con masa entre 800 y 1000 kg. Este valor coincide con los obtenidos de forma numérica para los vehículos con similar masa (METRO y NEON).
10 15 20 25 300.100.120.140.160.180.200.220.240.260.280.30
Dur
ació
n co
ntac
to (s
)
Velocidad (km/h)
METRO (800 kg) NEON (1300 kg) PICKUP (1800 kg) PICKUP C (3000 kg)
Fig. 6.20: Variación de la duración del contacto en función de la velocidad de impacto.
Desplazamientos
En el capítulo 3 se presentó una primera aproximación numérica en la que se estudió el impacto sobre un pilar con condiciones de contorno ideales. Si analizamos los desplazamientos tal como se hizo en aquél capítulo, es decir, representando el desplazamiento en la dirección del impacto para todos los nodos situados en el eje del pilar, se obtiene la figura 6.21, correspondiente a la simulación con el vehículo PICKUP y con una velocidad de 20 km/h. En esta figura, las curvas con menor desplazamiento corresponden a los nodos de menor altura y conforme aumenta la altura del nodo, también aumenta su desplazamiento en función del tiempo. Este patrón se mantiene hasta una cierta altura en la que los desplazamientos empiezan a disminuir, de forma que se solapan las curvas. No obstante, la última de estas curvas, correspondiente a la cabeza del pilar, muestra que su desplazamiento es

Resultados obtenidos
249
bastante grande, estando más cerca del valor máximo obtenido que de un valor nulo. Este comportamiento ya fue observado en los ensayos, en los que se comprobó que existía una aceleración en la cabeza del pilar; no obstante, la magnitud del desplazamiento correspondiente no se había obtenido hasta este momento.
Fig. 6.21: Desplazamiento de todos los puntos situados en el eje del pilar en función del tiempo
para el vehículo METRO con una velocidad de impacto de 20 km/h
Con el fin de obtener una mejor visualización del movimiento realizado por el pilar, se ha obtenido una secuencia de la deformada del eje del pilar en función del tiempo. En la figura 6.22 se muestra la traza de las deformadas correspondientes a todos los tiempos; es decir, todas ellas superpuestas en una misma figura.
Fig. 6.22: Traza de las deformadas del eje del pilar, correspondientes a los datos de la figura
6.21

Capitulo 6
250
En esta figura se observa que la mayor parte del movimiento se corresponde con oscilaciones de pequeña amplitud (menor que 0.5 mm) alrededor de la posición inicial. En todas las curvas se observa un desplazamiento de la cabeza. Sin embargo, mientras que en estas curvas de pequeña amplitud de movimiento la curvatura no es muy grande, para las curvas más alejadas de la posición inicial esta curvatura se hace mucho más significativa, ya que las barras de tesado modifican el comportamiento en voladizo del pilar forzando la aparición de estas curvaturas. En este sentido, podría pensarse que la curva más alejada es la que mayor curvatura presenta; no obstante, puede comprobarse en la figura que existen otras curvas de menor amplitud que presentan curvaturas similares o incluso superiores a la curva más alejada. Dado que la curvatura es un indicador del esfuerzo soportado, será necesario tener en cuenta este hecho en el análisis de las cargas estáticas equivalentes que se realiza en el siguiente apartado.
6.5. CARGA ESTÁTICA EQUIVALENTE
Tras los resultados obtenidos se ha comprobado que en las simulaciones dinámicas existe un movimiento de la cabeza del pilar, mientras que en las estáticas este movimiento es prácticamente nulo. Este movimiento de la cabeza durante los impactos ya fue observado en los experimentos realizados, en los que se registraron aceleraciones en la cabeza del pilar. Esto significa que el desplazamiento en cabeza que se observa en los impactos está producido por efectos inerciales y de transmisión de ondas, que no aparecen en las situaciones estáticas.
Además, la existencia de un movimiento considerable de la cabeza modifica el criterio utilizado en las simulaciones previas, en el que se utilizaba el máximo desplazamiento como sinónimo de daño, ya que el movimiento de la cabeza disminuye la curvatura necesaria en el pilar para conseguir el mismo desplazamiento. Por tanto, la comparación de desplazamientos máximos pierde relevancia a la hora de evaluar el daño en el pilar y se establece la curvatura en cada punto del eje del pilar como nuevo

Resultados obtenidos
251
parámetro de comparación. Esta comparación será contrastada con el daño en la sección más desfavorable.
A partir de los resultados obtenidos en las simulaciones estáticas, se ha obtenido la máxima curvatura correspondiente a cada una de las deformadas que se mostraron en la figura 6.6. Estas curvaturas se detallan en la tabla 6.4 y se representan en la figura 6.23. En esta figura se observa que la curvatura tiene una tendencia aproximadamente lineal con la carga hasta un valor aproximado de 200 kN, en el que las curvaturas crecen más deprisa con la carga aplicada. Si recordamos los resultados en cuanto a daño en la sección en simulaciones estáticas (figura 6.5), comprobamos que este punto de inflexión se corresponde con un daño en la sección que alcanza aproximadamente la mitad de ésta. A partir de este punto, la sección ofrece menos resistencia al giro a medida que se incrementa la carga estática aplicada.
Tabla 6.4: Curvaturas correspondientes a cada carga estática aplicada Carga estática aplicada (kN) Curvatura (1/mm)
50 1.07e-3 75 1.36e-3
100 1.78e-3 120 2.05e-3 200 3.70e-3 250 5.30e-3 350 9.21e-3
0 50 100 150 200 250 300 350 4000.000
0.002
0.004
0.006
0.008
0.010
Simulaciones AjusteC
urva
tura
(1/m
m)
Fuerza estática (kN) Fig. 6.23: Representación de los datos mostrados en la tabla 6.4 y ajuste a un polinomio de
grado 3.

Capitulo 6
252
Con el fin de facilitar la determinación de la carga estática correspondiente a una curvatura dada, se ha realizado el ajuste de los datos mostrados en la tabla 6.4 con un polinomio de tercer grado y se ha obtenido la siguiente expresión con un coeficiente de correlación de 0.9992:
10 3 8 2 5 510 3 10 2 10 6 10y x x x (6.1)
La expresión (6.1) será utilizada para la determinación de las cargas estáticas equivalentes correspondientes a una curvatura dada por un impacto. Este ajuste se ha incluido en la representación mostrada en la figura 6.23.
En cuanto a los resultados obtenidos en la simulación del impacto, en la figura 6.22 se mostró la evolución en el tiempo de las deformadas del pilar. A pesar de que la curva correspondiente al máximo desplazamiento tiene una curvatura considerable, a priori podría no ser la mayor de todas, ya que se observan otras curvas con menores desplazamientos pero con curvaturas similares. Por ello será necesario obtener todas las curvaturas en función del tiempo y de la posición del punto en el eje del pilar. En la figura 6.24 se muestra una representación tridimensional de los resultados obtenidos para el vehículo PICKUP con una velocidad de impacto de 20 km/h, a modo de ejemplo de los resultados obtenidos para el resto de vehículos y velocidades. En esta figura se representa en alturas el valor de la curvatura, y en los otros dos ejes la altura del punto y el tiempo, respectivamente. Se observa una zona de grandes curvaturas correspondiente al tiempo de carga del pilar y, pasado este tiempo y hasta el final de la simulación, pequeñas curvaturas correspondientes a la vibración libre del pilar. En concreto, para la simulación representada, la máxima curvatura se produce en un punto situado a 1.54 m de altura.

Resultados obtenidos
253
Fig. 6.24: Variación de la curvatura con la altura en el pilar y con el tiempo para el impacto
provocado por el vehículo METRO para una velocidad de 20 km/h
En este punto cabe preguntarse cuál es el instante para el que se ha producido esta máxima curvatura y su relación con la curva de carga del pilar. Para ello se ha representado su sincronización en la figura 6.25 para uno de los impactos, a modo de ejemplo de lo que sucede con todos los demás. Se observa que la curva de carga llega a su punto máximo unos instantes antes de que aparezca la máxima curvatura en el pilar, concretamente 0.09 s. Esta demora se debe, sin duda a la transmisión de la onda producida por el choque, desde el punto de impacto hasta el punto en el que se registra esta máxima curvatura, situado a 1200 mm de distancia del punto de impacto.
Fig. 6.25: Sincronización entre la curvatura (arriba) y la fuerza en el contacto (debajo) para el
impacto provocado por el vehículo METRO para una velocidad de 20 km/h

Capitulo 6
254
Los valores máximos de curvatura obtenidos en cada simulación se detallan en la tabla 6.5; estos valores serán comparados con los obtenidos en las simulaciones estáticas y con ello se establecerá una carga estática equivalente para cada caso.
Tabla 6.5: Curvaturas máximas observadas para cada vehículo y velocidad (1/mm) 10 km/h 20 km/h 25 km/h 30 km/h
METRO 5.86e-4 9.30e-4 1.30e-3 1.32e-3 NEON 7.47e-4 1.13e-3 1.25e-3 1.79e-3
PICKUP 1.22e-3 2.40e-3 5.73e-3 1.32e-2 PICKUP C 1.25e-3 2.70e-3 7.30e-3 1.48e-2
A partir de los valores de curvaturas máximas provocadas por impactos (tabla 6.5) y utilizando la expresión (6.1) se ha determinado la carga estática necesaria para obtener esta misma curvatura. Los valores se detallan en la tabla 6.6 y se representan en la figura 6.26.
Tabla 6.6: Carga estática equivalente a partir de comparación de curvaturas (kN) 10 km/h 20 km/h 25 km/h 30 km/h
METRO 27.32 46.21 67.26 68.42 NEON 36.07 57.51 64.38 95.89
PICKUP 62.66 131.58 288.34 470.00 PICKUP C 64.38 148.73 336.70 495.97
10 15 20 25 300
100
200
300
400
500
Car
ga e
stát
ica
equi
vale
nte
(kN
)
Velocidad (km/h)
METRO (800 kg) NEON (1300 kg) PICKUP (1800 kg) PICKUP C (3000 kg)
Fig. 6.26: Carga estática equivalente obtenida para cada vehículo en función de la
velocidad inicial

Resultados obtenidos
255
Los valores mostrados en la tabla 6.6, obtenidos a través de comparación entre curvaturas, se corroboran además por comparación del daño en la sección de hormigón. Tras las simulaciones estáticas se había comprobado que para cargas estáticas menores de 120 kN ninguna sección resulta dañada (figura 6.5); además en las simulaciones dinámicas correspondientes a los vehículos METRO y NEON tampoco se han obtenido daños significativos en ninguna sección (figuras 6.12 y 6.13). Por tanto, es esperable que las cargas estáticas equivalentes correspondientes a estos vehículos no superen los 120 kN para ninguna velocidad, tal como se ha obtenido (tabla 6.6). Para los vehículos PICKUP se determinó que aproximadamente la mitad de la sección quedaba dañada para un impacto a 25 km/h; la carga estática que provoca el daño de la mitad de la sección se sitúa entre 200 y 300 kN, tal como se ha obtenido. Para estos mismos vehículos y una velocidad de 30 km/h, una gran parte de la sección resulta dañada, lo que se corresponde con una carga estática de 470 kN aproximadamente, tal como se ha obtenido.
En la representación mostrada en la figura 6.26 se observa que las cargas estáticas obtenidas son similares tanto para el vehículo METRO y el NEON como para los dos vehículos PICKUP. En este punto hay que recordar que los vehículos METRO y NEON tienen una carrocería autoportante, mientras que el PICKUP tiene el chasis exento; además, las masas de cada vehículo son diferentes entre ellas: mientras que entre el PICKUP y PICKUP C hay una diferencia de masa sobre un mismo vehículo, entre el METRO y el NEON la diferencia de masas viene dada por tratarse de un vehículo diferente. Esto significa que la variación de la masa tiene una escasa influencia en la carga estática equivalente, tanto como incremento de masa en un mismo vehículo o como masa propia del vehículo. Por tanto, se deduce que el parámetro más importante a la hora de estimar la carga estática equivalente es la estructura interna del vehículo, es decir, si se trata de un vehículo con chasis exento o con carrocería autoportante.
Por otra parte, resulta interesante comparar estos datos con los que dan las distintas normativas. Para ello debemos aplicar las recomendaciones dadas a cada uno de los casos, en función de la masa del vehículo y de la

Capitulo 6
256
velocidad de impacto. Si aplicamos estas recomendaciones obtenemos los valores dados en la tabla 6.7.
Tabla 6.7: Carga estática equivalente recomendada por las normativas relacionadas (kN) VEHÍCULO DE MASA 800 KG (METRO)
NORMA 10 km/h 20 km/h 25 km/h 30 km/h AC EC1 1.7 – AA EC1 2.7 43 86 107 27
EC1 1.7 – CTE 50 50 50 50 EC1 2.7 – DIN 1055 40 40 40 40
VEHÍCULO DE MASA 1300 KG (NEON) NORMA 10 km/h 20 km/h 25 km/h 30 km/h
AC EC1 1.7 – AA EC1 2.7 55 110 137 165 EC1 1.7 – CTE 50 50 50 50
EC1 2.7 – DIN 1055 40 40 40 40 VEHÍCULO DE MASA 1800 KG (PICKUP)
NORMA 10 km/h 20 km/h 25 km/h 30 km/h AC EC1 1.7 – AA EC1 2.7 65 129 161 194
EC1 1.7 – CTE 50 50 50 50 EC1 2.7 – DIN 1055 40 40 40 40
VEHÍCULO DE MASA 3000 KG (PICKUP C) NORMA 10 km/h 20 km/h 25 km/h 30 km/h
AC EC1 1.7 – AA EC1 2.7 83 167 208 250 EC1 1.7 – CTE 50 50 50 50
EC1 2.7 40 40 40 40 DIN 1055 100 100 100 100
Si representamos los datos de la tabla 6.7 junto con las cargas estáticas obtenidas para cada vehículo (tabla 6.6), obtenemos las gráficas que se muestran en la figura 6.27, en las que se compara, para cada vehículo, los valores aplicables según cada norma (en función de la masa del vehículo) y los valores obtenidos en este trabajo.
En general, los valores dados por las partes 1.7 y 2.7 respectivamente del Eurocódigo 1, CTE y DIN 1055 se encuentran por debajo de los valores obtenidos en este trabajo, para cualquier velocidad en algunos casos, y para velocidades mayores de 20 km/h en todos los casos. En cuanto a los valores obtenidos a partir del Anexo C del Eurocódigo 1 1.7 y del Anexo A del Eurocódigo 1 2.7, son superiores a los obtenidos en este trabajo para los vehículos METRO y NEON. Para el vehículo PICKUP, tanto en su versión original como cargado, los valores recomendados por estos códigos se ajustan perfectamente a los obtenidos para este vehículo hasta una velocidad de 20

Resultados obtenidos
257
km/h. Sin embargo, a partir de esta velocidad las cargas obtenidas con las simulaciones son muy superiores a las indicadas por estas normas. Por tanto, las únicas recomendaciones que quedan del lado de la seguridad son las dadas en los Anexos A y C de los Eurocódigos 1 2.7 y 1.7, respectivamente, salvo en el caso del vehículo PICKUP con cualquier masa y con velocidad mayor de 20 km/h. Si el requerimiento para una carga recomendada por un código es que no sea superado bajo ninguna circunstancia, ni siquiera estas últimas recomendaciones podrían ser aceptadas.
10 15 20 25 3020
40
60
80
100
120
140
160
180
200
Car
ga e
stát
ica
equi
vale
nte
(kN
)
Velocidad (km/h)
AC EC1 1.7 - AA EC1 2.7 EC1 1.7 - CTE EC1 2.7 - DIN 1055 METRO
METRO (800 kg)
10 15 20 25 30
20
40
60
80
100
120
140
160
180
200
Car
ga e
stát
ica
equi
vale
nte
(kN
)
Velocidad (km/h)
AC EC1 1.7 - AA EC1 2.7 EC1 1.7 - CTE EC1 2.7 - DIN 1055 NEON
NEON (1300 kg)
10 15 20 25 300
100
200
300
400
500
Car
ga e
stát
ica
equi
vale
nte
(kN
)
Velocidad (km/h)
AC EC1 1.7 - AA EC1 2.7 EC1 1.7 - CTE EC1 2.7 - DIN 1055 PICKUP
PICKUP (1800 kg)
10 15 20 25 30
0
100
200
300
400
500
Car
ga e
stát
ica
equi
vale
nte
(kN
)
Velocidad (km/h)
AC EC1 1.7 - AA EC1 2.7 EC1 1.7 - CTE EC1 2.7 DIN 1055 PICKUP C
PICKUP C (3000 kg)
Fig. 6.27: Comparación de las cargas estáticas equivalentes obtenidas y las recomendadas por los códigos relacionados, organizados por vehículo.
Por otra parte, se observa una diferencia de comportamiento clara entre
los vehículos PICKUP y los otros dos (METRO y NEON). Mientras que en los primeros el comportamiento es completamente lineal con un cambio de

Capitulo 6
258
pendiente a partir de 20 km/h, para el resto el comportamiento es bastante más complejo, por lo que la tendencia de la carga estática equivalente con la velocidad no es tan lineal ni tiene un brusco cambio de comportamiento para velocidades menores de 30 km/h. Este hecho diferenciador entre los vehículos es debido a la diferente configuración estructural de cada uno de ellos. Tal como se ha descrito anteriormente, los vehículos PICKUP tienen un chasis exento; es decir, sobre la estructura resistente del vehículo, formada por los largueros y sus conexiones, se coloca el resto del vehículo sin ningún requerimiento estructural. En este caso, las ondas de choque generadas por el impacto se transmitirán por el chasis mientras el resto del vehículo almacena energía en forma de deformaciones elásticas o plásticas. Por tanto, el comportamiento estructural del vehículo viene marcado por la configuración de su chasis, lo que simplifica enormemente el problema. En cuanto a los otros dos vehículos (METRO y NEON), se trata de coches con carrocería autoportante, lo que significa que existen zonas de la carrocería debilitadas por medio de taladros, arrugas, disminución de secciones o largueros cónicos, con el fin de que durante el impacto se produzca una embutición sobre ellos mismos. En este tipo de vehículos el comportamiento frente a un impacto es mucho más complejo que en el caso anterior, por lo que es necesario analizar sus resultados de forma independiente.
Con el fin de dar generalidad a los resultados obtenidos, se han calculado los ajustes de las relaciones entre velocidad de impacto y carga estática equivalente, para cada uno de los vehículos estudiados. La carga estática equivalente obtenida para los vehículos PICKUP se puede ajustar por medio de una línea recta con un cambio de pendiente para 20 km/h de velocidad. Para el PICKUP se obtiene el siguiente ajuste, con un coeficiente de correlación de 0.9982:
6.89 6.26 10 / 20 /16.92 41.78 20 / 30 /
y x para km h x km hy x para km h x km h
(6.2)
Para el PICKUP Cargado, este ajuste, con un coeficiente de correlación de 0.9977, es el siguiente:

Resultados obtenidos
259
8.43 19.97 10 / 20 /17.36 20.10 20 / 30 /
y x para km h x km hy x para km h x km h
(6.3)
Para los otros dos vehículos (METRO y NEON) el ajuste a una recta tiene un coeficiente de correlación algo más bajo (0.91 en el peor caso), pero todavía aceptable. El ajuste para el NEON, con un coeficiente de correlación de 0.9444 es:
1.86 16.88 10 / 30 / y x para km h x km h (6.4)
Para el METRO, este ajuste, con un coeficiente de correlación de 0.9101, es el siguiente:
1.44 16.21 10 / 30 / y x para km h x km h (6.5)
Se observa que la diferencia entre el vehículo PICKUP y el PICKUP C consiste en un incremento de pendiente para el tramo comprendido entre 10 y 20 km/h, mientras que para el tramo comprendido entre 20 y 30 km/h la pendiente de las dos rectas es bastante similar. Este incremento de pendiente se puede relacionar con el incremento en la masa del vehículo, interpolando las pendientes correspondientes a las masas estudiadas para cada uno de los tramos, de forma que, para un vehículo tipo PICKUP, con el chasis exento, la carga estática equivalente en función de la masa y de la velocidad sería la siguiente:
3 2
4 2
1.28 10 4.58 1.1425 10 14.305 10 / 20 /
7 10 34.71 2.8175 10 588.295 20 / 30 /
CEE m v m para km h v km h
CEE m v m para km h v km h
(6.6)
Para los vehículos con carrocería autoportante, como el METRO o el NEON, se observa que los coeficientes de los ajustes obtenidos son muy similares, a pesar de que las masas de estos vehículos son muy distintas. Por tanto, para un vehículo de este tipo podría tomarse un valor medio entre los

Capitulo 6
260
coeficientes de los ajustes obtenidos para cada uno de ellos, de forma que la expresión válida en este caso sería:
1.65 16.54 10 / 30 / CEE v para km h x km h (6.7)
Como conclusión podemos decir que la carga estática equivalente depende fundamentalmente del tipo de vehículo implicado, más que de la masa de ese vehículo, ya que para vehículos modernos con carrocería autoportante se obtienen cargas estáticas equivalentes similares, independientemente de su masa. Para un mismo vehículo, la variación de la masa ha afectado muy ligeramente al resultado en el caso de un vehículo con el chasis exento; para el caso de un vehículo con carrocería autoportante no se ha estudiado esta característica, pero teniendo en cuenta la escasa variación obtenida con vehículos con carrocería autoportante de diferentes masas, resulta lógico pensar que el aumento de la masa en uno de ellos no influirá decisivamente en los resultados.
Por otra parte, tal como se analizó en el apartado 2.2 de esta memoria, es posible determinar un valor mayorado para la máxima fuerza desarrollada durante el impacto, asumiendo una serie de simplificaciones en el problema. Si este valor puede representar una referencia para evaluar la carga estática equivalente, se conseguiría un considerable ahorro de tiempo y recursos para su evaluación. Por ello, una vez determinada la carga estática equivalente, resulta interesante su comparación con las máximas fuerzas desarrolladas en el impacto. Esta comparación se muestra en la figura 6.28 organizada por vehículos.
En general, la carga estática equivalente es superior a la máxima fuerza de contacto, por lo que la determinación de la primera a través de la segunda llevaría a un bajo dimensionamiento de la carga estática equivalente. No obstante, en algunos casos estos dos valores son bastante similares, como en el caso del vehículo METRO, para cualquier velocidad, y en el caso del PICKUP, para velocidades inferiores a 20 km/h, independientemente de la carga que lleve este vehículo. Para velocidades superiores la carga estática equivalente es significativamente mayor que la máxima fuerza de contacto.

Resultados obtenidos
261
10 15 20 25 30
20
40
60
80
100
120METRO (800 kg)
Fuer
za (k
N)
Velocidad (km/h)
Carga estática equivalente Máxima fuerza de contacto
10 15 20 25 300
20
40
60
80
100
120NEON (1300 kg)
Fuer
za (k
N)
Velocidad (km/h)
Carga estática equivalente Máxima fuerza de contacto
10 15 20 25 300
100
200
300
400
500
600
Fuer
za (k
N)
Velocidad (km/h)
Carga estática equivalente Máxima fuerza de contacto
PICKUP (1800 kg)
10 15 20 25 300
100
200
300
400
500
600PICKUP C (3000 kg)
Fuer
za (k
N)
Velocidad (km/h)
Carga estática equivalente Máxima fuerza de contacto
Fig. 6.28: Comparación de las Cargas estáticas equivalentes y las Máximas fuerzas de contacto para cada vehículo
Destaca especialmente el caso del NEON para el que se alcanzan cargas
estáticas de valores similares a las obtenidas con el METRO (figura 6.26) pero máximos en las fuerzas de contacto menores (figura 6.19). Para explicar esta particularidad es necesario recordar el análisis teórico que se hizo en el capítulo 2 sobre la respuesta del pilar sometido a una carga impulsional. A partir de los resultados obtenidos en aquél capítulo se deduce que, manteniendo constante la masa y velocidad del vehículo, la respuesta del pilar es directamente proporcional a la máxima fuerza de contacto e inversamente proporcional a la duración de esta fuerza; por tanto, si estos dos valores disminuyen de forma proporcional el resultado sería el mismo.


263
CAPÍTULO 7. CONCLUSIONES Y FUTUROS DESARROLLOS
En este último capítulo se resumen los trabajos desarrollados en esta Tesis y se describen las conclusiones más relevantes derivadas de este trabajo. Asimismo se incluyen las directrices de las futuras líneas de trabajo relacionadas con la investigación llevada a cabo hasta el momento.
El trabajo realizado tiene su eje principal en la determinación de cargas estáticas equivalentes a un impacto provocado por un vehículo sobre un pilar de edificación. No obstante, otros puntos de interés en este trabajo son la determinación de la fuerza en el contacto durante el impacto, el diseño de un dispositivo para ensayos de impacto a escala real o el nuevo procedimiento desarrollado para la medición del desplazamiento durante el impacto, entre otros. Hay que destacar que, tanto los trabajos realizados como las conclusiones planteadas, son aportaciones originales de este trabajo, tal como se ha justificado en el capítulo 2 de esta memoria.
En concreto, los trabajos desarrollados han sido los siguientes:
Análisis comparativo de la normativa relacionada con los impactos a baja velocidad.
Estudio del Estado del Conocimiento en el campo de impactos estructurales y en concreto de aquellos provocados por vehículos.
Búsqueda y análisis de modelos de elementos finitos que reproduzcan de forma realista el comportamiento estructural de un vehículo real durante un impacto.

Capitulo 7
264
Implementación de un modelo de elementos finitos, con condiciones de contorno teóricas y materiales simplificados para el pilar, con el que obtener una primera aproximación numérica al problema. A través de este primer modelo se han realizado cálculos estáticos, modal y de impacto con los que se ha analizado el comportamiento tanto del vehículo como del pilar durante el impacto. Con estos resultados se han determinado las cargas estáticas equivalentes correspondientes a unos casos particulares de velocidad y masa del vehículo. Los valores obtenidos ratifican la necesidad del resto del trabajo realizado.
Ensayos de impacto de vehículos contra pilares de hormigón armado a escala real. Para el diseño de estos ensayos se han utilizado algunos resultados obtenidos en las simulaciones anteriores y se ha enfatizado el bajo coste.
Desarrollo de un nuevo procedimiento para la medición de desplazamientos provocados por impactos, mediante la utilización de una cámara de alta velocidad.
Implementación de un nuevo modelo de elementos finitos, con las condiciones de contorno impuestas durante los ensayos y con un modelo material para el hormigón que refleje todas sus características.
Ajuste del modelo en base a los resultados obtenidos en los ensayos. Para ello se han realizado cálculos modales y de impacto, con el fin de determinar los valores que deben tomar algunos parámetros del hormigón para que la estructura tenga la misma frecuencia fundamental y el mismo desplazamiento máximo cuando se ve sometida a un impacto provocado por un vehículo con la misma masa y velocidad que los utilizados en los ensayos.
Con el nuevo modelo ajustado a los ensayos se han realizado simulaciones estáticas y dinámicas con diferentes vehículos y velocidades, con lo que se ha determinado la carga estática equivalente correspondiente a cada caso y se ha comparado con

Conclusiones y futuros desarrollos
265
las indicadas en las normativas relacionadas. En este trabajo se ha utilizado como parámetro de comparación la curvatura del pilar, en lugar del máximo desplazamiento, que es el que habitualmente se utiliza en el cálculo de cargas estáticas equivalentes.
Determinación y análisis de otros resultados interesantes, como la fuerza en el contacto o el daño en el hormigón.
Tras la realización de estos trabajos, las conclusiones que se obtienen son las siguientes:
En cuanto a las cargas estáticas equivalentes:
Los valores indicados en las normativas relacionadas con impactos a baja velocidad son dispersos, llegando esta variación hasta más del 400 % en impactos contra estructuras de edificación. Además, no existen trabajos de investigación previos a éste que sean aplicables a impactos a baja velocidad sobre pilares de edificación.
Los valores recomendados por las Partes 1.7 y 2.7 respectivamente del Eurocódigo 1 son inferiores a los obtenidos en este trabajo para cualquier vehículo y velocidad de impacto, por lo que no son recomendaciones seguras.
Los valores obtenidos a partir de los Anexos C y A de las Partes 1.7 y 2.7 respectivamente del Eurocódigo1 quedan del lado de la seguridad en casi todos los supuestos. Únicamente en el caso de un vehículo con chasis exento y para velocidades superiores a 20 km/h, estos valores son inferiores a los obtenidos.
Las variaciones en la masa del vehículo, para un mismo vehículo, no influyen en los resultados. Es decir, el hecho de que el vehículo esté cargado o no durante el impacto, incluso aunque

Capitulo 7
266
esta carga prácticamente doble su peso original, no influye en las consecuencias del impacto.
La conclusión anterior nos lleva inevitablemente a la resolución de que las variaciones obtenidas entre los diferentes vehículos utilizados únicamente responde a sus diferentes características estructurales y amortiguadoras, y no a las variaciones en su masa. No obstante, resulta lógico pensar que el sistema amortiguador de un vehículo está relacionado con la masa de este vehículo; sin embargo, existen otros factores que condicionan mucho más este sistema amortiguador, como el tipo de vehículo o su antigüedad. La evolución de los sistemas de amortiguación ha experimentado grandes avances en los últimos tiempos, por lo que la fecha de fabricación del vehículo resulta un dato fundamental a la hora de estimar las consecuencias que tendrá un impacto provocado por este vehículo.
En el caso más desfavorable, correspondiente a un pilar con sección 25x35 cm2, la sección del pilar queda gravemente dañada para impactos provocados por un vehículo con chasis exento y sin los sistemas de amortiguación actuales, para velocidades de impacto superiores a 20 km/h. En el resto de los casos, especialmente para vehículos más modernos, la sección del pilar no resulta dañada para ninguna de las velocidades consideradas, por lo que la consideración de este tipo de acciones accidentales en el diseño de la estructura no modificaría la sección del pilar y, por tanto, no sería necesaria. No obstante, si para la estructura en cuestión es necesario considerar la posibilidad de que circule cualquier tipo de coche, habrá que tener en cuenta las mayores cargas estáticas obtenidas en este trabajo, del orden de 500 kN para una velocidad de 30 km/h.
La utilización de la máxima fuerza de contacto como estimación de la carga estática equivalente podría llevar a la infravaloración

Conclusiones y futuros desarrollos
267
de esta última, especialmente en el caso de coches con sistemas de amortiguación modernos.
En cuanto a la instrumentación durante un ensayo de impacto:
Los captadores de desplazamiento tipo transductor potenciométrico, que deben ser fijados a una estructura externa, no son fiables para la medición de desplazamientos durante un impacto.
La cámara de alta velocidad, utilizada junto con el método descrito en el Capítulo 4 de esta memoria, constituye un método fiable y robusto para la medición de desplazamientos durante un impacto.
A partir del trabajo realizado y teniendo en cuenta las conclusiones descritas en el apartado anterior, se han identificado una serie de líneas de investigación que podrían completar el trabajo realizado y aportar conclusiones de interés relacionadas con la investigación llevada a cabo hasta el momento. Entre dichas líneas se destacan las siguientes propuestas:
En cuanto al desarrollo general del estudio:
Desarrollo del trabajo para un pilar metálico. Tal como se describió en el Capítulo 3 de esta memoria, las simulaciones previas realizadas con un pilar metálico mostraron valores para las cargas estáticas equivalentes superiores a los indicados por las normas.
Estudio del impacto causado por la pequeña maquinaria de trabajo que habitualmente trabaja en naves industriales. En este tipo de naves la estructura suele ser metálica, por lo que este punto se complementa con el anterior. La relevancia de este trabajo es la falta de sistemas de amortiguamiento de este tipo de vehículos, por lo que se prevé que las consecuencias sobre el

Capitulo 7
268
pilar serán mayores que las obtenidas con un vehículo de pasajeros. No obstante, estas consecuencias se verán modificadas por la velocidad del vehículo que, en este caso, será previsiblemente menor que la correspondiente a un vehículo de pasajeros en un aparcamiento.
En cuanto a la instrumentación durante un ensayo de impacto:
Medidas a grandes distancia con la cámara de alta velocidad. Con ello se evitaría cualquier interferencia debida al movimiento del suelo durante la grabación de las imágenes. Además, esta mejora permitiría la medición de estructuras de difícil acceso y se evitarían interferencias durante la construcción de la misma o en su uso habitual.
Aumento de la precisión obtenida con la cámara de alta velocidad, a través de métodos subpixel. Con el procedimiento utilizado en este trabajo, la precisión obtenida se corresponde con el tamaño del pixel en la imagen que, en este caso ha sido de 0,3 mm. A pesar de que es un error bueno para el trabajo realizado, hay que tener en cuenta que este valor depende de la distancia entre la cámara y la diana, por lo que este punto es un complemento independiente pero necesario de la línea de trabajo anterior.
Diseño de dianas con las que sea posible determinar movimientos no sólo en la dirección perpendicular al eje óptico de la cámara, sino también en la dirección axial, con lo que se podrían detectar giros del plano perpendicular a la dirección axial respecto de un eje vertical. Con este método hubiera sido posible detectar torsiones en el pilar ensayado.
Cálculo de la doble integración de la señal de un acelerómetro para obtener desplazamientos durante un impacto. Con ello

Conclusiones y futuros desarrollos
269
seríamos capaces de obtener desplazamientos en cualquier punto a partir de la señal recogida con un acelerómetro.
En cuanto al diseño del experimento:
Asegurar el empotramiento perfecto del pilar con su cimentación.
Cuantificar el desplazamiento en cabeza estimado para cargas estáticas horizontales (situadas a la altura del impacto) sobre pilares de hormigón en estructuras que puedan verse sometidas a este tipo de impacto, como edificios o aparcamientos situados bajo la calzada. En este sentido sería necesario realizar un estudio detallado de estos desplazamientos en función de las características de la estructura como la altura del edificio o los condicionantes al movimiento que impongan las estructuras o suelos colindantes. Una vez determinado este desplazamiento para una serie de cargas, sería necesario modificar el bastidor de forma que el desplazamiento en cabeza coincida con el anterior para las mismas cargas estáticas. Para ello resultaría conveniente implementar un modelo de elementos finitos con el que hacer las variaciones necesarias hasta obtener el objetivo. Los ensayos realizados con este nuevo bastidor se ajustarán todavía más a lo que sucede en un impacto real.
Realización de los ensayos en entornos reales, con el fin de evitar la incertidumbre de la amplitud del movimiento de la cabeza del pilar. A tal fin, sería necesario utilizar estructuras representativas de las que puedan sufrir este tipo de acciones accidentales, como un edificio o un aparcamiento situado bajo una vía pública. Uno de los inconvenientes más graves a solucionar en este caso es la dotación de velocidad al vehículo, ya que en el interior de un aparcamiento sería inviable realizar una rampa para ello. Por tanto sería necesario recurrir a sistemas de guiado del vehículo, bien mediante mecanismos de enganche

Capitulo 7
270
instalados en el suelo y operados a distancia, o bien mediante la instalación de un sistema autónomo de guiado en el vehículo, controlado por un ordenador a bordo previamente programado.

271
ANEXO 1: PROYECTOS Y PUBLICACIONES ASOCIADOS A ESTE TRABAJO
Proyecto financiado en convocatoria pública: Estudio numérico y experimental del comportamiento de pilares de edificación frente a cargas de impactos producidas por vehículos (GVPRE/2008/192), Financiado con 6865.50 € por la Consellería de Educación, de 01/01/2008 al 31/12/2008, Investigador Principal: Salvador Ivorra, Participantes: Belén Ferrer, Borja Varona, Ramón Irles, Javier García.
Ferrer B., Ivorra S., Irles R., Low velocity vehicle impact: an outline of relevant codes, Revista de la Construcción 9, (2), 2010, pp. 18-25.
Ferrer B., Ivorra S., Segovia E., Irles R., Tridimensional modelization of the impact of a vehicle against a metallic parking column at a low speed, Engineering Structures 32, 2010, pp. 1986-1992.
Ferrer B., Espinosa J., Pérez J., Ivorra S., Mas D., Optical scanning for structural vibration measurement, Research in Non Destructive Evaluation 22, 2011, pp. 61-75.
Ferrer B., Ivorra, S., Segovia, E., Mas, D., Study of Vehicle impact against a reinforced concrete building column, Archives of Civil and Mechanical Engineering, Enviado en 2011.

Anexo 1
272
Ferrer B., Ivorra S., Segovia E., Irles R., Impact load in parking steel column: Code Review and Numerical approach, 2nd International Conference on Computational Methods in Structural Dynamics and Earthquake Engineering (COMPDYN 2009) Rodas (GRECIA), Junio 2009.
Ferrer B., Ivorra S., Segovia E., Irles R., Dynamic Análisis of a Steel Column under a Vehicle Impact Load, The Twelfth International Conference on Civil, Structural and Environmental Engineering Computing, Madeira (PORTUGAL), Septiembre 2009.
Ferrer B., Ivorra S., Irles R., Mas D. Real size experiments of car crash against building column, 11th International Conference on Structures Under Shock and Impact (SUSI2010), Tallin (ESTONIA), Julio 2010.
Ferrer B, Ivorra S., Irles R., Mas, D., Realistic model of a car crash against a building concrete column, The 8th International Conference on Structural Dynamics (EURODYN 2011), Leuven (BÉLGICA), Aceptado para presentación oral en Julio 2011.

Proyectos y publicaciones asociados a este trabajo
273
Low velocity vehicle impact: an outline of relevant codes
Revista de la Construcción 9, (2), 2010, pp. 18-25


Proyectos y publicaciones asociados a este trabajo
275

Anexo 1
276

Proyectos y publicaciones asociados a este trabajo
277

Anexo 1
278

Proyectos y publicaciones asociados a este trabajo
279

Anexo 1
280

Proyectos y publicaciones asociados a este trabajo
281

Anexo 1
282

Proyectos y publicaciones asociados a este trabajo
283
Tridimensional modelization of the impact of a vehicle against a metallic parking column at a low speed
Engineering Structures 32, 2010, pp. 1986-1992.


Proyectos y publicaciones asociados a este trabajo
285

Anexo 1
286

Proyectos y publicaciones asociados a este trabajo
287

Anexo 1
288

Proyectos y publicaciones asociados a este trabajo
289

Anexo 1
290

Proyectos y publicaciones asociados a este trabajo
291


Proyectos y publicaciones asociados a este trabajo
293
Optical scanning for structural vibration measurement
Research in Non Destructive Evaluation 22, 2011, pp. 61-75


Proyectos y publicaciones asociados a este trabajo
295

Anexo 1
296

Proyectos y publicaciones asociados a este trabajo
297

Anexo 1
298

Proyectos y publicaciones asociados a este trabajo
299

Anexo 1
300

Proyectos y publicaciones asociados a este trabajo
301

Anexo 1
302

Proyectos y publicaciones asociados a este trabajo
303

Anexo 1
304

Proyectos y publicaciones asociados a este trabajo
305

Anexo 1
306

Proyectos y publicaciones asociados a este trabajo
307

Anexo 1
308

Proyectos y publicaciones asociados a este trabajo
309


Proyectos y publicaciones asociados a este trabajo
311
Study of Vehicle impact against a reinforced concrete building column
Archives of Civil and Mechanical Engineering, Enviado en 2011


Proyectos y publicaciones asociados a este trabajo
313

Anexo 1
314

Proyectos y publicaciones asociados a este trabajo
315

Anexo 1
316

Proyectos y publicaciones asociados a este trabajo
317

Anexo 1
318

Proyectos y publicaciones asociados a este trabajo
319

Anexo 1
320

Proyectos y publicaciones asociados a este trabajo
321


Proyectos y publicaciones asociados a este trabajo
323
Real size experiments of car crash against building column
11th International Conference on Structures Under Shock and Impact (SUSI2010), Tallin (ESTONIA), Julio 2010.


Proyectos y publicaciones asociados a este trabajo
325

Anexo 1
326

Proyectos y publicaciones asociados a este trabajo
327

Anexo 1
328

329
ANEXO 2: VALIDACIÓN DE LOS MODELOS DE VEHÍCULOS


Validación de los modelos de vehículos
331

Anexo 2
332

Validación de los modelos de vehículos
333

Anexo 2
334

Validación de los modelos de vehículos
335

Anexo 2
336

Validación de los modelos de vehículos
337

Anexo 2
338

Validación de los modelos de vehículos
339

Anexo 2
340

Validación de los modelos de vehículos
341

Anexo 2
342

343
REFERENCIAS
[ACI 318S-05, 2005] “318S-05/318SR-05: Spanish Edition Building Code Requirements for Structural Concrete and Commentary”, Reported by ACI Committee 318, American Concrete Institute, 2005
[ACI 358.1-R92, 1992] “Analysis and design of reinforced and prestressed-concrete guideway structures”, Reported by ACI Committee 358, American Concrete Institute,1992
[ACI 370R] “Guidelines for the Design of Concrete Structures for Blast Effects”, Reported by ACI Committee 370, American Concrete Institute
[Adam, 2006] J. M. Adam, S. Ivorra, E. Giménez, J.J. Moragues, P. Miguel, C. Miragall, P. Calderón, “Nonlinear finite element modelling of axially loaded RC columns strengthened whit steel angles and battens” Computers and Structures (2006) 1-17
[Aguilera, 2006] Edgar Aguilera Viladomiu, “Diseño de un refuerzo para el parachoques delantero de un vehículo de turismo” Trabajo Fin de Carrera, Escuela Universitaria Politécnica de Cataluña, Ingeniería técnica industrial, 2006
[AISC 303, 2005] AISC “Code of Standard Practice for Steel Buildings and Bridges” AISC 303, American Institute of Steel Construction, Inc., Chicago, Illinois, 2005
[AISC 360, 2005] AISC “Specification for structural steel buildings” AINSI/AISC 360-05, American Institute of Steel Construction, Inc., Chicago, Illinois, 2005
[Algaard, 2005] Algaard, W., Lyle, J. and Izatt, C., "Perforation of Composite Floors," 5th European LS-DYNA User's Conference, Birmingham, United Kingdom, May, 2005. http://www.dynalook.com/european-conf-2005/Algaard.pdf
[ANSYS LS-DYNA, 2004] “ANSYS LS-DYNA User’s Guide”, ANSYS Release 9.0, Noviembre 2004
[ANSYS, 2004] “ANSYS theory reference 10.0” ANSYS Inc., 2004

Referencias
344
[Arros, 2006] Jorma Arros, Nikolay Doumbalski, “Análisis of aircraft impact to concrete structures”, Nuclear Engineering and Desing 237 (2007) 1241-1249
[ASCE/SEI 7-05, 2006] “Minimun Design Loads for Buildings and Other Structures”, ASCE STANDARD, ASCE/SEI 7-05, American Society of Civil Engineers, 2006
[Atahan, 2006] Ali O. Atahan, “Finite-element crash test simulation of New York portable concrete barrier with I-Shaped Connector” 10.1061/(ASCE)0733-9445(2006)132:3(430)
[Bachmann, 1997] Bachmann H. Vibration problems in structures: practical guidelines. Birkhäuser; 1997.
[Banthia, 1987] N. P. Banthia, Sidney Mindess, Arnon Bentur, Impact behaviour of concrete beams. Materials and structures 1987, 20, 293-302
[Barbosa, 1998] Antonio F. Barbosa and Gabriel O. Ribeiro “Analysis of reinforced concrete using ANSYS nonlinear concrete model”, Computational mechanics, S. Idelsohn, E. Oñate and E. Dvorkin (Eds.) © CIMNE, Barcelona, Spain 1998
[Bathe, 1996] K.J. Bathe, “Finite Element Procedures”, Prentice Hall, 1996
[Bazant, 1976] Bazant, Z.P.; Bhat, P., Endochronic Theory of Inelasticity and Failure of Concrete, Journ. of Eng. Mech. Div., August 1976
[Belytschko, 1983] Belytschko, T.; Hughes, T. J. editors, “Computational methods for Transient Analysis”, North-Holland, Amsterdam, 1983.
[Bentur, 1986] Betur, A.; Mindess, S.; Banthia, N, The behaviour of concrete under impact loading: experimental procedures and method of analysis, Mat. Struct. 19 (1986) 371-378
[Bischoff, 1991] Bischoff, P.H.; Perry, S.H., Compressive behaviour of concrete at high strain rates, Mater Struct 1991; Vol. 24, pp.425-50
[Bischoff, 1995] Bischoff, P.H.; Perry, S.H., Impact behaviour of plain concrete loaded in uniaxial compression, J Eng Mech 1995, Vol 121(6), pp. 685-93
[Bodner, 1975] Bodner, S.R.; Parton, Y, Constitutive Equations for Elastic Viscoplastic Strain-Hardening Metals. Journ. of Applied Mechanics, June 1975, pp. 385-389

Referencias
345
[Borovinsek, 2000] M. Borovinsek, M. Vesenjak, M. Ulbin, Z. Ren, “Simulation of crash test for high containment levels of road safety barriers” Engineering Failure Analysis 14 (2007) 1711-1718
[Brace, 1971] Brace, W.F., Jones, A.H., Comparison of uniaxial deformation in shock and static loading of three rocks, J Geophys Res 1971, Vol 76, pp.4913-21
[Brara, 1999] Brara, A., Etude expérimentale de la traction dynamique du béton par écaillage, PhD Thesis, Université de Metz, 1999
[Broadhouse, 1986] Broadhouse, B.J., "DRASTIC - A Computer Code for Dynamic Anaylsis of Stress Transients in Reinforced Concrete," Safety and Engineering Science Division, United Kingdom Atomic Energy Authority, Winfrith, AEEW-R 2124, 1986.
[Broadhouse, 1987] Broadhouse, B.J. and Neilson, A.J., "Modelling Reinforced Concrete Structures in DYNA3D," Safety and Engineering Science Division, United Kingdom Atomic Energy Authority, Winfrith, AEEW-M 2465, October, 1987. Paper presented at DYNA3D User Group Conference, London, September, 1987.
[Broadhouse, 1993] Broadhouse, B.J., and Atwood, G.J., "Finite Element Analysis of the Impact Response of Reinforced Concrete Structures Using DYNA3D",12th International Conference on Structural Mechanics in Reactor Technology, Stuttgart, Germany, August, 1993. http://www.iasmirt.org/SMiRT12/JH13-3.pdf
[Broadhouse, 1995] Broadhouse, B.J. “The Winfrith Concrete Model in LS-DYNA3D”, Report: SPD/D (95) 363, Structural Performance Department, AEA Technology, Winfrith Technology Centre, U.K (1995)
[Broadhouse, 1995] Broadhouse, B.J., "The Winfrith Concrete Model in LS-DYNA3D," Safety Performance Department, Atomic Energy Authority Technology, Winfrith, SPD/D(95)363, February, 1995.
[BS 6399-1:1996, 2002] “Loading for buildings. Part 1: Code of practice for dead and imposed loads”, British Standard, October 2002.
[Calvetti, 2003] Calvetti, F.; Viggiani, G.; Tamagnini, C., A numerical investigation of the incremental non-linearity of granular soils, Ital Geotech J 2003, Vol 3 (3), pp. 11-29

Referencias
346
[Camborde, 2000] Camborde, F.; Mariotti, F.C.; Donzé, F-V, Numerical study of rock and concrete behaviour by discrete element modelling, Comput Geotech 2000, Vol 27(4), pp. 225-47
[CEB, 1993] CEB-FIP Model Code 1990, Comité Euro-International du Beton, Thomas Telford House, 1993
[CEB, 1998] CEB. “Concrete structures under impact and impulsive loading”. Synthesis Report, Bulletin d’Information Nº 187, Comité Euro-International du Beton, Lausanne; 1988
[Cedolin, 1977] Cedolin, L.; Crutzen, Y.R.; Dei Poli, S., Triaxial Stress-Strain Relationship for Concrete, Journ. of Eng. Mech. ASCE, Vol. 103, Nº EM3, pp. 423-439, 1977
[Cocco, 2002] Leonardo J. Cocco, Guillermo M. Gerbaudo, Miguel E. Ruiz, Carlos A. Prato, “Análisis numérico no-lineal de tubos de acero rellenos de hormigón”, Rev. Int. de Desastres Naturales, Accidentes e Infraestructura Civil. Vol. 4(1) (2002) 41, 52
[Coon, 1999] Coon, B. A.; Reid, J. R.; Rohde, J. R.; Dynamic Impact Testing of Guardrail Posts Embedded in soil, Midwest Roadside Safety Facility (MwRSF), University of Nebraska-Lincoln, Julio 1999
[COSMOS, 2007] “COSMOS/DesignSTAR 2.0, Análisis MEF Integrado con sistemas CAD” Disponible en: http://www.iberisa.com/soporte/femap/ aspect_ratio.htm [accedido en Abril 2011]
[Cotsovos, 2005] Cotsovos, D.M.; Pavlovic, M.N., Numerical modelling of structural concrete under impact loading, 5th GRACM International Congress of Computational Mechanics, Limassol, June 2005
[Cotsovos, 2008-a] Cotsovos, D.M.; Pavlovic, M.N., Numerical investigation of concrete subjected to compressive impact loading. Part 1: A fundamental explanation for the apparent strength gain at high loading rates, Computers and Structures, Vol. 86, pp. 145-163, 2008
[Cotsovos, 2008-b] Cotsovos, D.M.; Pavlovic, M.N., Numerical investigation of concrete subjected to compressive impact loading. Part 2: Parametric investigation of factors affecting behaviour at high loading rates, Computers and Structures, Vol. 86, pp. 164-180, 2008

Referencias
347
[Cotsovos, 2008-c] Cotsovos, D.M.; Pavlovic, M.N., Numerical investigation of concrete subjected to high rates of uniaxial tenile loading, International Journal of Impact Engineering, Vol. 35, pp. 319-335, 2008
[CTE, 2006] “Código Técnico de la Edificación” Ministerio de Vivienda, Marzo 2006
[Cundall, 1989] Cundall, P.A., Numerical experiments on localization in frictional materials, Ingenieur-archiv 1989, Vol 59, pp. 148-59
[Cunha, 2001] Cunha, A.; Caetano, E.; Delgado, R.; “Dynamic tests on a large cable stayed bridge: an efficient approach, ”Journal of Bridge Engineering ASCE. 133, 656-664 (2001)
[Chang, 1987] Chang, T.Y.; Taniguchi, H.; Chen W.F., Non-linear finite element analysis of reinforced concrete panels, J Struct Engng (ASCE), Vol 113(1), pp. 122-40, 1987
[Chen, 1988] Chen, W. F., D. J. Han, Plasticity for Structural Engineers, Springer-Verlag, New York, 1988.
[Chopra, 2001] Chopra, A. K. Dynamic of structures: Theory and applications to earthquake engineering, 2nd Ed., Prentice-Hall, Englewood Cliffs, N. J., 2001.
[Christensen, 1968] Christensen, R.M., On obtaining solutions in non.linear Viscoelasticity, J. Appl. Mecahnics, 35, 129, 1968
[De Borst, 1990] De Borst, R.; Sluys, L.J., Localization in a Coserat continuum under static and dynamic loading conditions. Comp Methods Appl Mech Eng 1990, Vol 90, pp.805-27
[De Borst, 1993] De Borst, R. et al., Fundamental issues in Finite Element analysis of localization of deformation, Eng Comput, Vol 10, pp. 259-277, 1986
[Desai, 1984] Desai, C.S; Siriwardane, H.J., Constitutive laws for engineering materials: with emphasis on geologic materials, Prentice-Hall, Inc., Englewood Cliffs, New Jersey (1984)
[DIN 1055-9: 2003-08] “Actions on structures - Part 9: Accidental actions”, DIN Deutsches Institut für Normung eV., August 2003
[Donea, 1978] Donea, J., editor, “Advanced Structural Dynamics”, Applied Science Publishers, London, 1978

Referencias
348
[Donzé, 2001] Donzé, F-V, SDEC (Spherical Discrete Element Code), Version 2.00, isrn: geonum-nst-2001-03-fr edn, France, 2001. Available from <www.geonum.com>
[Donzé, 2002] Donzé, F-V, Packing spherical discrete elements of unequal size. Tech. Rep. isrn: geonum-nst-2002-02-fr Eng Geonum Report, France, 2002. Available from <www.geonum.com>
[Drucker, 1952] Drucker, D. C. and Prager, W. Soil mechanics and plastic analysis for limit design. Quarterly of Applied Mathematics, vol. 10, no. 2, pp. 157–165. 1952
[EAA, 2004] “El aluminio mejora la seguridad en el transporte” European Aluminium Association, Press information, 2004
[EC1-1-1, 2001] “Eurocode 1: Actions on structures – Part 1-1: General actions – Densities, self-weight, imposed loads for buildings” Final Draft prEN 1991-1-1, Comité Europeo de Normalización, Julio 2001
[EC1-1-7, 2003] “Eurocode 1: Actions on structures – Part 1-7: General actions – Accidental actions” Final Project Team Draft (Stage 34), Draft prEN 1991-1-7, Comité Europeo de Normalización, Marzo 2003
[EC1-2-7, 1998] “Eurocode 1: Actions on structures – Part 2-7: Accidental actions due to impact and explosions” ENV 1991-2-7, European comité for Standardization, June 1998
[EC-2-1-1, 2004] “Eurocode 2: Design of concrete structures-Part 1-1: General rules and rules for buildings” European comité for Standardization, April 2004
[EHE-08, 2008] “EHE-08, Instrucción de hormigón estructural”, Ministerio de Fomento, 2008
[Ehlers, 2001] Ehlers, W.; Diebels, S.; Michelitsch, T., Microscopic modelling of granular materials taking into account particle rotations. Lec Note Phys 2001, Vol 568, pp. 259-74
[Eibl, 1987] J. Eibl, Design of concrete structures to resist accidental impact. The Structural Engineer, Volume 65A, nº 1, January 1987
[Elyasian, 2006] I. Elyasian, N. Abdoli, H. R. Ronagh, “Evaluation of parameters effective in FRP shear strengthening of RC beams using FE method”, Asian

Referencias
349
journal of civil engineering (building and housing) vol. 7, nº 3 (2006) pages 249-257
[Farag, 1996] Farag, H.M.; Leach, P., Material modelling for transient dynamic analysis of reinforced concrete structures, International Journal for Numerical Methods in Engineering, Vol 39, pp. 2111-2129, (1996)
[Ferrer, 2010] Ferrer B., Ivorra S., Irles R., Low velocity vehicle impact: an outline of relevant codes, Revista de la Construcción, 9 (2), (2010)
[Ferrer, 2010] Ferrer, B.; Espinosa, J.; Pérez, J.; Ivorra, S.; Mas, D., “Optical scaning for structural vibration measurement” Research in Non Destructive Evaluation, 22, pp. (2011)
[Finite, 2007] “Finite element model” Disponible en: http://www.ncac.gwu.edu/vml/models.html [accedido en Abril 2011]
[Ford, 2007] “Ford Crown Victoria Crash Simulation” Disponible en: http://www.ara.com/Projects/SVO/crownvic.htm [accedido en Abril 2011]
[Gary, 1998] Gary, G.; Bailly, P., Behaviour of quasi-brittle material at high strain rate, experiment and modelling, Eur J Mech, A/Solids 1998, Vol 17(3), pp. 403-20
[Georgin, 2003] J. F. Georgin, J. M. Reynouard, Modeling of structures subjected to impact: concrete behaviour under high strain rate, Cement & Concrete Composites 25 (2003) 131-143
[Goicolea, 2000] Goicolea, J. M., “Estructuras sometidas a acciones dinámicas”, Capítulo: “Estructuras sometidas a impacto”, Centro Internacional de Métodos Numéricos en Ingeniería”, Barcelona, España, Octubre 2000, paginas 535-567
[Gomes, 2001] Gomes, H.M.; Awruch, A.M., Some aspects on three-dimensional numerical modelling of reinforced concrete structures using the finite element method, Advances in Engineering Software 32 (2001) 257-277
[Gopalaratnam, 1996] Gopalaratnam, V.; Gerstle, W.; Isenberg, J.; Mindess, S., State of the art report on dynamic fracture, ACI Committee 446, 1996
[Govindjee, 1995] Govindjee, S.; Kay, J.G.; Simo, J.C., Anisotropic Modelling and Numerical Simulation of Brittle Damage in Concrete, Int, J, Numer. Meth. Engng., 38, 3611-3633

Referencias
350
[Hack, 2005] Hack E, Leroy D., “Camera-based monitoring of the rigid-body displacement of a mandrel in superconducting cable production”, Opt Lasers Eng. 2005; 43: 455-474.
[Hallquist, 1993] Hallquist, J. O., Lin, T., Tsay, C. S., LS-DYNA Theoretical Manual, Nonlinear dynamic analysis of solids in three dimensions, Livermore Software Technology Corp., Livermore, 1993.
[Hild, 2003] Hild, F.; Brajer, X.; Denoual, C.; Forquin, P., On the probabilistic-deterministic transition involved in a fragmentation process of brittle materials. Comput Struct 2003, Vol 81, pp. 1241-53
[Hill, 1979] Hill, R., Theoretical Plasticity of Textured Aggregates. Math. Proc. Camb. Phil. Soc., Vol. 85, 1979, pp. 179-191
[Holmquist, 1993] Holmquist TJ, Jonson GR, Cook WH, “A computational constitutive model for concrete subjected to large strains, high strain rates and high pressures”, Proceedings of the fourteenth international symposium on ballistics, Quebec, Canada; 1993, p. 591-600
[Hopkinson, 1914] B. Hopkinson, A method of measuring the pressure produced in the detonation of high explosives or by the impact of bullets. Philios Trans R Soc London, Ser A 1914; 213(10): 437-56
[Hu, 2004] Hsuan-Teh Hu, Chiang-Shiann Huang, Ming-Hsien Wu, Yih-Min Wu, “Numerical analysis of concrete-filled steel tubes subjected to axial force”
[Huang, 2009] Chin-Cheng Huang, Tung-Yueh Wu, “A study on dynamic impact of vertical concrete cask tip-over using explicit finite element analysis procedures”, Annals of Nuclear Energy 36 (2009) 213-221
[Huebner, 1982] Huebner, K. H, The Finite Element Method for Engineers, John Wiley & Sons Inc, 1982.
[IBC, 2009] “2009 International Building Code”, International Code Council, Disponible en http://www2.iccsafe.org/states/2009ICodes/Building/Building _Frameset.html [accedido en 1 Sep 2009]
[Itoh, 1999] Y. Itoh, T. Ohno, C. Liu, “Behaviour of steel piers subjected to vehicle collision impact” Proceedings of international conference on steel and aluminium structures, Espoo, Finland, 1999. p. 821-828

Referencias
351
[Itoh, 2006] Yoshito Itoh, Chunlu Liu, Ryuichi Kusama, “Dynamic simulation of collision of heavy high-speed trucks with concrete barriers” Chaos, Solitons and Fractals 34 (2007) 1239-1244
[Janach, 1976] Janach, W., The role of bulking in brittle failure of rocks under rapid compression, Inter J Rock Mech Min Sci Geomech Abstr 1976, Vol 13, pp. 177-86
[Johnson, 1972] Johnson, W., “Impact Strength of Materials” Edward Arnold, London, 1972
[Joy, 1993] Joy, S. and Moxley, R. White sands Missile Range 53/4-inch Concrete Properties, United States Army Engineers Waterways Experiment Station Briefing Prepared for Defense Special Weapons Agency, August 1993
[Kobayashi, 1984] Kobayashi, A.S., Dynamic Crack Propagation in Brittle and Ductile Materials, Proc. Int. Conf. on Struct.. Impact and Crashworthiness. London: Elsevier Applied Science Publishers, Vol. 1, 1984, pp. 129-154
[Koh, 2001] C. G. Koh, Z. J. Liu, S. T. Quek, Numerical and experimental studies of concrete damage under impact. Magazine of Concrete Research, 2001, 53, Nº 6, December, 417-427
[Krajcinovic, 1981] Krajcinovic, D.; Fonseka, G.V., The continuous Damage Theory of Brittle Materials – Part I, II, J. App. Mech., Vol. 48, 1981, pp. 809-824
[Krieg, 1972] Krieg, R.D., A Simple Constitutive Description for Cellular Concrete, Sandia National Laboratories, Alburquerque, NM, Rept. SC-DR-72-0883 (1972)
[Launay, 1972] Launay, P. and Gachon, H; “Strain and ultimate strength of concrete uner triaxial stress” Special Publication, SP-34, ACI 1, 1972, pp. 269-282
[Lee, 2006] Lee JJ, Shinozuka M. NDT & E Int. 2006; 39: 425-431.
[Liu, 2009] Yan Liu, Aie Ma, Fenglei Huang, “Numerical simulations of oblique-angle penetration by deformable proyectiles into concrete targets”, International Journal of Impact Engineering 36 (2009) 438-446

Referencias
352
[Loland, 1980] Loland, K.E., Continuous Damage Model for Land – Response Estimation of Concrete, Cement and Concrete Research, Vol. 10, 1980, pp. 395-402
[López, 1998] López, J.J., Analysis of reinforced concrete structures subjected to dynamic loads with a viscoplastic Drucker-Prager model, Applied Mathematical Modelling 22 (1998) 495-515
[Loret, 1990] Loret, B; Prevost, J.H., Dynamic strain localization in elasto-(visco)-plastic solids. Part 1. General formulation and one-dimensional examples. Part 2. Plane strain examples, Comp. Meth. Appl. Mech. Eng., Vol 83, pp. 247-273 and 275-294, 1990
[LRFD, 1995] “Manual of Steel Construction: Load and Resistance Factor Design”. American Institute of Steel Construction, Chicago, Illinois, 1995
[LS PREPOST, 2007] “LS PREPOST on line documentation” Disponible en: http://www.lstc.com/lspp/ [accedido en 27 Oct 2007]
[LS-DYNA, 2003] “LS-DYNA Keyword user’s manual”, versión 970, © Livermore Software Technology Corporation, Abril 2003
[LS-DYNA, 2006] “LS-DYNA Theroy Manual”, John O. Hallquist, March 2006
[Mahmood, 2004] [Mahmood, 2004] Hikmat F. Mahmood, Bahig B. Fileta, “Design of vehicle structures for crash energy management” informe
[Malvar, 1997] L. Javier Malvar, John E. Crawford, James W. Wesevich, Don Simons, “A Plasticity Concrete Material Model for DYNA3D”, Int. J. Impact Engng, Vol. 19, Nos. 9-10, pp. 847-873, 1997
[Malvar, 1998-a] L. Javier Malvar, C. Allen Ross, “Review of Strain Rate Effects for Concrete in Tension”, ACI Materials Journal, V. 95, nº 6, November-December 1998.
[Malvar, 1998-b] L. Javier Malvar, C. Allen Ross, “Review of Static and Dynamic Properties of Concrete in Tension”, ACI Materials Journal, V. 95, nº 6, November-December 1998, pages 735-739.
[Malvar, 1998-c] Malvar, L.J.; Crawford, J.E., Dynamic increase factors for concrete, 28th Department of Defense Explosives Safety Seminar, Orlando, FL, 1998

Referencias
353
[Malvar, 2000] Malvar, L. J., Crawford, J. E., Morral, K. B., “K&C Concrete Material Model Release III – Automated Generation of AMterial Model Input” K&C Technical Report TR-99-24-B1, 18 August 2000
[Mark, 1999] Mark, K.K.; Bligh, R.P.; Menges, W.L., Schoeneman, S.K., NCHRP Report 350 test 3-11 of the New York DOT portable concrete barrier with I-beam connection, TTI Test Report 473220-7, Texas Transportation Institute, College Station, Tex, 1999
[Material Model 159, 2007] Users Manual for LS-DYNA Concrete Material Model 159, Federal Highway Adminstration, U.S. Department of Transportation, Publication Nº FHWA-HRT-05-062, Mayo 2007
[Mihashi, 1977] Mihashi, H.; Izumi, M., A stochastic Theory for Concrete Fracture, Cement and Concrete Research, Vol. 17, 1977
[Mills, 1970] Mills, L.L. and R. M. Zimmerman, “Compressive strength of plain concrete under multiaxial loading conditions”, ACI Journal 67(10), 1970, pp. 802-807
[Murray, 1995] Murray, Y.D. and Lewis, B.A, Numerical Simulation of Damage in Concrete, APTEK technical report to the Defense Nuclear Agency, Contract No. DNA001-91-C-0075, Report No. DNA-TR-94-190 (1995)
[Murray, 1997] Murray, Y.D., Modeling Rate Effect in Rock and Concrete, Proceedings of the 8th International Symposium on Interaction of the Effects of Munitons with Structures, Volume IA, Defense Special Weapons Agency (1997)
[Murray, 2007a] Murray, Y.D., Users Manual for LSDYNA Concrete Material Model 159, Report nº FHWA-HRT-05-062, Federal Highway Administration (2007)
[Murray, 2007b] Murray, Y.D.; Abu-Odeh, A.; Bligh, R., Evaluation of Concrete Material Model 159, Report nº FHWA-HRT-05-063, Federal Highway Administration (2007)
[Nassif, 2005] Nassif H.N.; Gindy, M.; Davis, J.; “Comparison of laser Doppler vibrometer with contact sensors for monitoring bridge deflection and vibration” NDT & E Int. (2005)
[NCAC, 2007] “FHWA/NHTSA National Crash Analysis Center” Disponible en: http://www.ncac.gwu.edu/ [accedido en 27 Oct 2007]

Referencias
354
[NCAP, 2009] European New Car Assessment Programme (Euro NCAP). Frontal Impact Testing Protocol. Version 5.0. October 2009.
[NCSE-02, 2002] Norma de la Construcción Sismorresistente Española (2002). Real Decreto 997/2002, de 27 de septiembre, por el que se aprueba la norma de construcción sismorresistente: parte general y edificación (NCSR-02), Boletín Oficial del Estado.
[Nickitopoulou, 2006] Nickitopoulou A, Protopsalti K, Stiros, “Monitoring dynamic and quasi-static deformations of large flexible engineering structures with GPS: Accuracy, limitations and promises”, S. Eng Struct. Aug. 2006; 28 (10): 1471-1482.
[Nilsson, 1979] Nilsson, L., Impact loading on Concrete Structures. Dept. of Structural Mechanics, Chalmers University of Technology, Göteborg, Publication 79:1, 1979
[Noble, 2005] C. Noble, E. Kokko, I. Darnell, T. Dunn, L. Hagler, L. Leininger, “Concrete Model Descriptions and Summary of Benchmark Studies for Blast Effects Simulations
[NOR 93] Vibrations et chocs Mécaniques – Vocabulaire, Norme AFNOR NF E 90 – 001 (NF ISO 2041), June 1993
[Ottosen, 1977] Ottosen, N.S., "A Failure Criterion for Concrete," Journal of the Engineering Mechanics Division, Volume. 103, Number 4, pages 527-535, July/August, 1977.
[Papadrakakis, 1981] Papadrakakis, M. A Method for the Automatic Evaluation of the Dynamic Relaxation Parameters, Computer Meth. Appl. Mech. Eng. Vol. 25, pp. 35-48
[Park, 1982] Park, K. C., A Family of Solution Algorithms for Nonlinear Structural Analysis Based on the Relaxation Equations, Int. J. Num. Engng. Vol. 18, pp. 1337-1347.
[Park, 2001] S. W. Park, Q. Xia, M. Zhou, Dynamic behaviour of concrete at high strain rates and pressures: II. Numerical simulation. International journal of Impact Engineering 25, 2001; 887-910
[Park, 2005] Park KT, Kim SH, Lee KW., “The determination of bridge displacement using measured acceleration”, Eng Struct. 2005; 27: 371-8.

Referencias
355
[Perzyna, 1966] Perzyna, P., Fundamental problems in Viscoplasticity. Advances in Applied Mechanics. New York: Academic Press, Vol. 9, 1966
[Philips, 1976] Philips, D.V.; Zienkiewicz, O.C., Finite element non-linear análisis of concrete structures. Proc Inst Civ Engrs, Part 2, Vol 61(3), pp. 59-88, 1976
[PWRI, 1998] A study on the concrete barriers for high speed collision, Research Report Nº 207, Tsukuba, Japón, 1998
[Rashid, 1980] Rashid, Y.R.; Sharabi, M.N., Strain-Rate Dependent Plasticity in thermo-Mechanical Transient Analysis. Nucl. Engineering and Design, Vol. 57, 1980, pp. 41-48
[RCAR, 1999] Research Council for Automobile Repairs, “The procedure for conducting a low speed 15 km/h offset insurance crash test to determine the damageability and repairability features for motor vehicles” Disponible en: http://www.rcar.org/papers/craft_test.pdf [accedido en 27 Oct 2007]
[Reinhardt, 1984-a] Reinhardt, H. W. and Cornelissen, H.A.W.; “Post-Peak Cyclic Behavior of Concrete in Uniaxial and Alternating Tensile and Compressive Loading”, Cement and Concrete Research, vol. 14, 1984, pp. 263-270.
[Reinhardt, 1984-b] Reinhardt, H.W., Tensile Fracture of Concrete at High Rates of Loading, Workshop Northwestern Univ. Evanston, Ill., September 1984
[Rossi, 1994] Rossi, P. ; Van Mier, J.G.M. ; Toutlemonde, R.; Le Maou, F. ; Boulay, C., Effect of loading rate on the strength of concrete subjected to uniaxial tension, Mater Struct 1994, Vol 27, pp. 260-4
[Sandler, 1976] Sandler, I.S.; DiMaggio, F.L.; Baladi, G.Y., Generalized Cap Model for Geological Materials, Journal of the Geothecnical Engineering Division, Volume 102, GT7, pp 683-699, (1976)
[Sandler, 1979] Sandler, I.S.; Rubin, D., An Algorithm and a Modular Subroutine for the Cap Model, International Journal for Numerical and Analytical Methods in Geomechanics, vol. 3, pp 173-186, (1979)
[SAP2000, 2007] “SAP2000. Analysis reference manual. Versión 11”, Computers Structures Inc., Berkeley (CA, USA), 2007

Referencias
356
[Schweizerhof, 1999] Schweizerhof, K., Walz, M., Rust, W., Franz, U., Krichner, M., Quasi-static Structural Analysis with LS-DYNA - Merits and Limits, 2nd European LS-DYNA Users Conference, Gothenburg, Sweden, 1999.
[Schwer, 1994] Schwer, L.E. ; Murray, Y.D., A Three-Invariant Smooth Cap Model with Mixed Hardening, International Journal for Numerical and Analytical Methods in Geomechanics, Vol. 18, pp. 657-688 (1994)
[Schwer, 2005] Leonard E. Schwer, L. Javier Malvar, “Simplified Concrete Modeling with *MAT_CONCRETE_DAMAGE_REL3”, JRI LS-DYNA User Week 2005, August 2005
[Sharpe, 2004] Neil Sharpe, Robert Vendring, Kees Houtzager “Improved design for frontal protection”, Disponible en: http://www.madymo.co.kr/data/improved_design_for_frontal_protection.pdf [accedido en 27 Oct 2007]
[Sherif, 2005] Sherif El-Tawil, P.E., M. ASCE; Edward Severino; Priscilla Fonseca, “Vehicle collision with Bridge Piers”, Journal of Bridge Engineering, ASCE/MAY/JUNE 2005, p. 345-353
[Shugar, 1992] Shugar, T.A.; Holland, T.J.; Malvar, L.J., Applications of finite element technology to reinforced concrete explosive containment structures, Proc. 25th DoD Explosive Safety Seminar, Anaheim, CA (1992)
[Simo, 1987] Simo, J.C., Ju, J.W., “Strain and Stress Based Continuum Damage Model”, Int. J. of Solids and Structures, Vol. 23, nº 7, 1987
[Sluys, 1992] Sluys, L.J. Wave propagation, localization and dispersion in softening solids, PhD Thesis, Delft University, 1992
[Stiros, 2008] Stiros SC., “Errors in velocities and displacements deduced from accelerographs: an approach based on the theory of error propagation”, Soil Dyn Earthq Eng. 2008; 28: 415-420.
[Tai, 2006] Yuh-Shiou Tai, Chia-Chih Tang, “Numerical simulation: The dynamic behaviour of reinforced concrete plates under normal impact”, Theoretical and Applied Fracture Mechanics 45 (2006) 117-127
[Toutlemonde, 1995] Toutlemonde, F.; Résistance au choc des structures en béton; du comportement du matériaux au calcul des ouvrages, PhD Thesis, Ecole Nationale des Ponts et Chaussées, 1995

Referencias
357
[Tucker, 1995] Jeffrey Tucker, “Injury with low-speed collisions”, Dynamic Chiropractic, May 22, 1995, Volume 13, Issue 11
[Ugural, 2008] Ugural, A.C.; Fenster, S.K. “Advanced strength and applied elasticity”, 4th edition, Prentice Hall, New Jersey, 2008
[Underwood, 1983] Underwood, P. G., Dynamic relaxation – A review, Computational Methods for Transient Dynamic Análisis, Chapter 5, T. Belytschko and T.J.R. Hughes eds., North Holland, Amsterdam, 1983.
[Valanis, 1971] Valanis, K.C., A theory of Viscoplasticity without a Yield Surface, Archives of Mechanics 23, 1971, pp. 517-573
[Wahbeh, 2003] Wahbeh AM, Caffrey JP, Masri SF. Smart Mater Struct. 2003; 12: 785-794
[Willam, 1974] Willam, K.I.; Warnke, E.P., Constitutive Model for the Triaxial Behaviour of Concrete. Int. Assoc. Bridge Struct. Engin., Symp. Concr, Struct. Subjected to Triaxial Stresses, Bergamo, Proc. Vol. 19, 1974, pp. 1-31
[Yang, 1990] Yang, Y-B; Shieh, M-S, Solution method for non-linear problems with multiple critical points, AIAA J, Vol 28 (12), pp. 2110-6, 1990
[Yang, 2006] Yang J, Li JB, Lin G., “A simple approach to integration of acceleration data for dynamic soil-structure interaction analysis”, Soil Dyn Earthq Eng. 2006; 26: 725-734.
[Zaouk, 1996] Zaouk, A. K., Bedewi, N. E., Kan, C. D., Marzoughi, D. (1996), “Validation of a non-linear finite element vehicle model using multiple impact data”, Crashworthiness and occupant protection in transportation systems, AMD 218, ASME, New York, 91-106.
[Zheng, 2007] Lu Xin-zheng, Zhang Yan-sheng, Jiang Jian-jing, Ren Ai-zhu, Ning Jing, “Nonlinear Finite Element Simulation for the Impact between Over-high Truck and Bridge-Superestructure”, Proc. 7th. Int. Conf. Shock & Impact Loads on Superestructures, Beijing, 2007, 387-394.
[Zienkiewicz, 1991] Zienkiewicz, O., Taylor, R.L., The Finite Element Method, Vol. 1 and 2, 4th ed., McGraw-Hill, London, England, 1991
[Zukas, 1982] Zukas, J. A. et al., editores, “Impact Dynamics”, John Wiley, New York, 1982


Reunido el Tribunal que suscribe en el día de la fecha acordó otorgar, por
a la Tesis Doctoral de Don/Dña. la
calificación de .
Alicante de de
El Secretario, El Presidente,
UNIVERSIDAD DE ALICANTE CEDIP
La presente Tesis de D. ________________________________________________ ha
sido registrada con el nº ____________ del registro de entrada correspondiente.
Alicante ___ de __________ de _____
EL ENCARGADO DEL REGISTRO,


La defensa de la tesis doctoral realizada por D/Dª
se ha realizado en las siguientes lenguas: y , lo que
unido al cumplimiento del resto de requisitos establecidos en la Normativa propia de la
UA le otorga la mención de “Doctor Europeo”.
Alicante, de de
EL SECRETARIO..............................................................EL PRESIDENTE