TESIS DE PREGRADO - bdigital.unal.edu.co · Figura 1.4 Neurona biológica y neurona artificial 15...
90
1 TESIS DE PREGRADO Caso de control neuronal adaptable para sistemas multivariados Autor Alejandro Mejía Álvarez Director Prof. Dr. Ing. Jesús Antonio Hernández Riveros PROGRAMA DE INGENIERÍA DE CONTROL UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLIN 2009
Transcript of TESIS DE PREGRADO - bdigital.unal.edu.co · Figura 1.4 Neurona biológica y neurona artificial 15...

1
TESIS DE PREGRADO
Caso de control neuronal adaptable para sistemas multivariados
Autor
Alejandro Mejía Álvarez
Director
Prof. Dr. Ing. Jesús Antonio Hernández Riveros
PROGRAMA DE INGENIERÍA DE CONTROL
UNIVERSIDAD NACIONAL DE COLOMBIA
SEDE MEDELLIN
2009

2
ÍNDICE
Introducción 9 1. Fundamentos de Redes Neuronales Artificiales 11 1.1. Introducción a las redes neuronales 11 1.1.1. Operativa 13 1.1.2. Breve introducción biológica 13 1.2 Características principales de las Redes Neuronales 15 1.2.1. Elementos de una red neuronal artificial 15 1.2.2. Estado de activación 16 1.2.3. Función o regla de activación 17 1.2.4. Conexiones entre neuronas 18 1.2.5. Función de salida o de transferencia 19 1.2.6. Estructura de un sistema neuronal artificial 20 1.2.7. Formas de conexión entre neuronas 21
1.3 Principales tipos de Redes Neuronales 24
1.3.1. Redes Neuronales Supervisadas y No Supervisadas 24
1.3.1.1. Aprendizaje supervisado 24 1.3.1.1.1 Aprendizaje por corrección de error 25 1.3.1.1.2 Aprendizaje por refuerzo 26 1.3.1.1.3 Aprendizaje estocástico 26 1.3.1.1.4 Reglas de entrenamiento Supervisado 26 1.3.2.1. El aprendizaje no supervisado o autoorganizado 27 1.3.2.1.1 Reglas de Entrenamiento No Supervisado 27

3
1.3.3. Perceptrón 28
1.3.3.1. Regla de aprendizaje del perceptron 29 1.3.3.2 Perceptrón multicapa 30
1.3.4 Backpropagation 31
1.3.4.1 Algoritmo de entrenamiento de la Red Backpropagation
32 1.3.5 La regla delta generalizada 33 1.3.5.1 Adición del momento a la regla delta generalizada 35 2. Control Adaptable 40 2.1 Etapas del control adaptable 40 2.2 Tipos de sistemas de control adaptable 41 2.2.1 Control adaptable programado 42 2.2.2 Control adaptable con modelo de referencia 42 2.2.3 Control adaptable autosintonizable 43 2.3 Sistemas de control basados en redes neuronales artificiales 44
2.3.1 Arquitecturas de neurocontrol 44
2.3.1.1 Arquitecturas para el modelado de sistemas 45 2.3.1.2 Identificación y control de sistemas dinámicos 47 2.3.1.3 Neurocontroladores indirectos 49 2.3.1.4 Neurocontroladores directos 49
3. Sistemas de Control Multivariables 51
3.1 Análisis de un sistema 2x2 53

4
3.2 Apareamiento de lazos de control 55 3.3 Definición de ganancia relativa 56 3.4 Calculo del arreglo de ganancia relativa 57
4. Controlador neuronal simple (CNS) y Controlador PID neuronal 60 4.1 Controlador neuronal simple (CNS) 60 4.2 Controlador PID neuronal 68
5. Caso de aplicación del controlador neuronal simple sobre un proceso MIMO en una torre de destilación 72
5.1 Concepto de desacople 73
5.1.1 Desacople lineal parcial 74 5.1.2 Desacople lineal total 74
5. 2 Simulaciones del proceso para un sistema con parámetros fijos 76
5. 3 Simulaciones del proceso para un sistema con parámetros variante 81
6. Conclusiones 87 7. Referencias Bibliográficas 88

5
Lista de Figuras
Figura 1.1 Procedimiento para operar con redes neuronales 13 Figura 1.2 Neurona biológica 14 Figura 1.3 Enlaces neurona biológica 14 Figura 1.4 Neurona biológica y neurona artificial 15 Figura 1.5 Modelo de una neurona artificial 15 Figura 1.6 Neurona artificial 18 Figura 1.7 Forma compacta de la neurona artificial 18 Figura 1.8 Modo básico de funcionamiento 19 Figura 1.9 Estructura jerárquica de un sistema basado en RNA 21 Figura 1.10 Estructura de una red multinivel con las conexiones hacia adelante 22 Figura 1.11 Estructura ejemplos de conexiones con propagación hacia atrás 22 Figura 1.12 Red de una sola capa 23 Figura 1.13 Red multicapa 23 Figura 1.14 Principales tipos de RNA 24 Figura 1.15 Aprendizaje por corrección de error 25 Figura 1.16 Reglas de entrenamiento supervisado 27 Figura 1.17 Entrenamiento no supervisado 27 Figura 1.18 Perceptrón 28 Figura 1.19 Conexiones del perceptrón 30 Figura 1.20 Red de tres capas 31 Figura 1.21 Regla delta generalizada 34 Figura 1.22 Backpropagation, red neuronal de 2x 2x1 36 Figura 1.23 Error global de la red de 2x2x1 36 Figura 1.24 Error global de la red de 2x2x1 con momento 37 Figura 1.25 convergencia de los pesos 37 Figura 1.26 Red neuronal de 10x3x2 38 Figura 1.27 Error global de la red neuronal de 10x3x2 39 Figura 1.28 Convergencia de los pesos de la red neuronal de 10x3x2 39 Figura 2.1 Control adaptable 41 Figura 2.2 Control adaptable programado 42 Figura 2.3 Control adaptable con modelo de referencia 43 Figura 2.4 Control adaptable autosintonizable 43 Figura 2.5 Modelado básico o directo de la planta 45 Figura 2.6 Modelado directo inverso de la planta 46 Figura 2.7 Modelado especializado inverso de la planta 46 Figura 2.8 Modelado de Operador 47 Figura 2.9 Identificación de sistemas no lineales con redes neuronales 48 Figura 2.10 Esquema de control indirecto con redes neuronales 49 Figura 2.11 Esquema de control directo con redes neuronales 50

6
Figura 3.1 Reactor tanque agitado 51 Figura 3.2 Apareamiento de lazos de control 52 Figura 3.3 Controlador multivariable 52 Figura 3.4 Sistema de control 2x2 53 Figura 3.5 Apareamientos u1 → y1, u2 → y2 53 Figura 3.6 Esquema de interacción entre las entradas sobre las salidas 54 Figura 4.1 Variación del parámetro a 60 Figura 4.2 Variación uno de a 61 Figura 4.3 Variación dos de a 61 Figura 4.4 Variación tres de a 61 Figura 4.5 Variación del parámetro b 62 Figura 4.6 Variación uno de b 62 Figura 4.7 Variación dos de b 62 Figura 4.8 Variación tres de b 62 Figura 4.9 Variación del parámetro θ 63 Figura 4.10 Variación uno de θ 63 Figura 4.11 Variación dos de θ 63 Figura 4.12 Variación tres de θ 64 Figura 4.13 Controlador neuronal simple basado en un esquema de control adaptable directo 64 Figura 4.14 Simulación del CNS 67 Figura 4.15 Respuesta del CNS ante una señal de onda cuadrada 67 Figura 4.16 Forma de la neurona 68 Figura 4.17 Controlador y la planta para el caso SISO 70 Figura 4.18 Simulación del PID neuronal 71 Figura 4.19 Respuesta del PID neuronal 71 Figura 5.1 Esquema general de una columna de destilación con controlador 72 Figura 5.2 Desacople entrada salida 73 Figura 5.3 Desacople lineal parcial 74 Figura 5.4 Desacople lineal total 75 Figura 5.5 Esquema del sistema en lazo cerrado 76 Figura 5.6 Planta con parámetros fijos 77 Figura 5.7 Simulación del sistema en lazo cerrado con planta de parámetros fijos77 Figura 5.8 Respuesta del sistema de la figura 5.7 78 Figura 5.9 Salida y1 Vs. Tiempo (seg.) 78 Figura 5.10 Salida y2 Vs. Tiempo (seg.) 79 Figura 5.11 a1 Vs. Tiempo (seg.) 79 Figura 5.12 b1 Vs. Tiempo (seg.) 79 Figura 5.13 Θ1 Vs. Tiempo (seg.) 79 Figura 5.14 Error1 Vs. Tiempo (seg.) 79 Figura 5.15 Esfuerzo de control U1 Vs. Tiempo (seg.) 80 Figura 5.16 a2 Vs. Tiempo(seg.) 80 Figura 5.17 b2 Vs. Tiempo (seg.) 80 Figura 5.18 Θ2 Vs. Tiempo (seg.) 80 Figura 5.19 Error2 Vs. Tiempo (seg.) 80 Figura 5.20 Esfuerzo de control U2 Vs. Tiempo (seg.) 80

7
Figura 5.21 Esquema del controlador PI secuencial 81 Figura 5.22 Salida y1 Vs. Tiempo (seg.) 81 Figura 5.23 Salida y2 Vs. Tiempo (seg.) 81 Figura 5.24 Planta variante 82 Figura 5.25 Función de transferencia G11 82 Figura 5.26 Función de transferencia G12 82 Figura 5.27 Función de transferencia G21 83 Figura 5.28 Función de transferencia G22 83 Figura 5.29 Simulación del sistema en lazo cerrado con planta de parámetros variantes 83 Figura 5.30 Salida y1 Vs. Tiempo (seg.) 85 Figura 5.31 Salida y2 Vs. Tiempo (seg.) 85 Figura 5.32 Salida y1 Vs. Tiempo (seg.) 86 Figura 5.33 Salida y2 Vs. Tiempo (seg.) 86
Lista de Tablas
Tabla 1.1 Funciones de activación 20 Tabla 1.2 Capacidades del Perceptrón multicapa 31

8
CASO DE CONTROL NEURONAL ADAPTABLE PARA SISTEMAS MULIVARIADOS
RESUMEN Recientemente se ha incrementado la utilización de la inteligencia artificial en los campos de la informática industrial, la electrónica de potencia y los sistemas de control. Las redes neuronales artificiales necesitan de una gran base de datos que describan el funcionamiento del sistema junto a un análisis lógico, en lugar del análisis matemático, para controlar el sistema. En este trabajo se pretende ilustrar de una manera muy comprensible para el lector, la teoría del control neuronal adaptable comenzando con el capítulo uno, en el que se habla sobre la teoría básica de redes neuronales, para así pasar al capítulo dos en el que se trata sobre el control adaptable y el neurocontrol. Por otra parte, el capítulo tres contiene información sobre los sistemas de control multivariable, y finalmente en el capítulo cuatro se muestra una aplicación usando un controlador neuronal simple y el desarrollo de un PID neuronal para un caso SISO, para luego aplicar el controlador neuronal simple descentralizado a la solución de un caso de control multivariable sobre un sistema de control, el cual es una torre de destilación. Luego se realiza una comparación de desempeño sobre el sistema mencionado contra un controlador PI secuencial. También se hace una reproducción del algoritmo Backpropagation en el SIMULINK de MATLAB, el cual tiene mucha importancia en los algoritmos neuronales. Para enriquecer un poco más el tema tratado en este trabajo, se comparan los resultados encontrados en los controles neuronales, contra los resultados encontrados con los reguladores PID clásicos.

9
Introducción
El problema del control de una variable física en un proceso industrial consiste en la identificación de variables de control y dispositivos que permitan mantenerlo constantemente en operación de los niveles deseados y en una forma adecuada, a pesar de influencias externas (perturbaciones) que actúen en sentido contrario o tiendan a desestabilizarlo. Sin embargo, al control de un proceso industrial no se llega en forma arbitraria, por el contrario, se llega a él, por la necesidad de satisfacer de la mejor forma posible los múltiples objetivos que pueda perseguir una industria (beneficio económico, seguridad del proceso o del personal, conservación energética, etc.) ya sea a nivel de un subproceso aislado o de una planta completa o por que la naturaleza del proceso así lo requiere, como es en el caso de los reactores químicos con reacciones exotérmicas o plantas nucleares. Ahora bien, controlar procesos del mundo real no es una tarea simple debido a que estos son frecuentemente no lineales e inciertos, y el derivar un modelo sobre el cual el se basa el diseño del controlador es aún una tarea más compleja si los principios fundamentales del proceso no son completamente comprendidos. Además, la competencia en muchos sectores industriales provoca la necesidad de disponer de técnicas fiables y flexibles que permitan la operación de un proceso con gran eficiencia y en condiciones de máximo beneficio económico. Es así que en los últimos años se han desarrollado técnicas de control adaptable y robustas tendientes al control de procesos complejos (fundamentalmente no lineales). Un sistema de control adaptable, muestra como característica, la habilidad de preservar el desempeño del sistema, a partir de la dinámica de la planta mediante un algoritmo que opere en línea y sintonice en forma adecuada los parámetros del controlador ante la dinámica de la planta. Sin embargo, como se dijo anteriormente, derivar un modelo del proceso hace difícil la implementación de este tipo de métodos de control. Ahora bien, pueden aprovecharse las características de las redes neuronales artificiales (RNA) con las del control adaptable, para crear un nuevo tipo de controladores denominado ‘control neuronal adaptable’ o más brevemente, ‘neurocontrol’. El neurocontrol es un dinámico campo de investigación que en los últimos años ha atraído una considerable atención en la comunidad científica y de ingeniería de control. En recientes años ha habido un gran incremento en la aplicación de las redes neuronales en identificación de la dinámica (modelado), predicción y control de sistemas complejos. Las redes neuronales se caracterizan por su habilidad de aprender de los ejemplos en lugar de tener que programarse en un sentido convencional. Su uso permite que la dinámica de sistemas complejos sea modelada y un control exacto sea logrado a

10
través del entrenamiento, sin tener información a priori sobre los parámetros del sistema. La relevancia del uso de las redes neuronales en control se debe principalmente a que casi todos los procesos difíciles de controlar son no lineales, pero son pocos los diseños de control para sistemas no lineales que son usados en la práctica. A pesar de los muy buenos resultados que se han reportado en las investigaciones que se han efectuado y la gran cantidad de esquemas de control que se han probado, las aplicaciones industriales del neurocontrol no son aún una rutina y la mayoría de los esquemas diseñados se han implementado sólo en ambientes académicos o en investigación industrial. En este trabajo se pretende ilustrar de una manera muy comprensible para el lector, la teoría del control neuronal adaptable comenzando con el capítulo 1, en el que se habla sobre la teoría básica de redes neuronales para así pasar al capítulo 2 en el que se trata sobre el control adaptable y el neurocontrol. Por otra parte, el capítulo 3 contiene información sobre los sistemas de control multivariable, y finalmente en el capítulo 4 se muestra una aplicación usando un controlador neuronal simple y el desarrollo de un PID neuronal para un caso SISO, para luego aplicar el controlador neuronal simple descentralizado a la solución de un caso de control multivariable sobre un sistema de control, el cual es una torre de destilación. Luego se realiza una comparación de desempeño sobre el sistema mencionado contra un controlador PI secuencial. También se hace una reproducción del algoritmo Backpropagation en el SIMULINK de MATLAB, el cual tiene mucha importancia en los algoritmos neuronales. Para enriquecer un poco más el tema tratado en este trabajo, se comparan los resultados encontrados en los controles neuronales, contra los resultados encontrados con los reguladores PID clásicos.

11
CAPÍTULO 1 1. Fundamentos de Redes Neuronales Artificiales 1.1 Introducción a las redes neuronales Los sistemas de computación, son exitosos para encontrar la solución de problemas matemáticos o científicos, en la creación, mantenimiento y manipulación de bases de datos, en comunicaciones electrónicas, en el procesamiento de textos y gráficos, pero su mejor habilidad es que definitivamente tienen una gran incapacidad para interpretar el mundo. Esto ha hecho que un gran número de investigadores centre su atención en el desarrollo de nuevos sistemas de tratamiento de la información, que permitan solucionar problemas cotidianos, tal como lo hace el cerebro humano; este órgano biológico cuenta con varias características deseables para cualquier sistema de procesamiento digital, tales como: 1. Es robusto y tolerante a fallas, diariamente mueren neuronas sin afectar su desempeño. 2. Es flexible, se ajusta a nuevos ambientes por medio de un proceso de aprendizaje, no hay que programarlo. 3. Puede manejar información difusa, con ruido o inconsistente. 4. Es altamente paralelo 5. Es pequeño, compacto y consume poca energía. La teoría de las redes neuronales artificiales ha brindado una alternativa a la computación clásica, para aquellos problemas, en los cuales los métodos tradicionales no han entregado resultados muy convincentes, o poco convenientes. Las aplicaciones más exitosas de las RNA son: 1. Procesamiento de imágenes y de voz 2. Reconocimiento de patrones 3. Planeamiento 4. Interfaces adaptivas para sistemas Hombre/máquina

12
5. Predicción 6. Control y optimización 7. Filtrado de señales A continuación se presenta una descripción general de las características que debe poseer un problema para que su solución con redes neuronales proporcione buenos resultados, así como aquellas que sugieren que el empleo de esta técnica puede no resultar aconsejable o viable.
a) Características que debe tener el problema:
• No se dispone de un conjunto de reglas sistemáticas que describan completamente el problema.
• En cambio, si se dispone de muchos ejemplos o casos históricos (esta es una condición indispensable)
• Los datos procedentes del problema son imprecisos o incluyen ruido
• El problema es de una elevada dimensionalidad (por ejemplo, la
matriz de puntos que conforman una imagen puede ser demasiado grande como para que un sistema convencional que opera en serie pueda hacer un análisis de la imagen en tiempo real).
• Una situación frecuente es que los métodos de redes neuronales
proporcionan una alternativa mucho más rápida y sencilla de desarrollar que otras técnicas convencionales.
• Si las condiciones de trabajo son cambiantes se puede aprovechar la
capacidad para adaptarse a estos cambios de las redes neuronales, reentrenando el sistema con nuevos ejemplos.
b) Características que hacen desaconsejables el empleo de redes neuronales:
• Existe un algoritmo que resuelve con total eficacia el problema. Es
el caso de los problemas puramente algorítmicos o numéricos (multiplicación de números, inversión de matrices, etc.)
• No se dispone de un número adecuado de casos (ejemplos) para entrenar a la red.
• Tareas críticas o potencialmente peligrosas, cuya solución siempre
deba ser perfectamente predecible y explicable. A veces no resulta

13
fácil interpretar la operación de la red neuronal o predecir con absoluta fidelidad el resultado que pueda proporcionar en todos los casos posibles [1].
1.1.1 Operativa La figura 1.1 describe el procedimiento para operar con redes neuronales. Originalmente la red neuronal no dispone de ningún tipo de conocimiento útil almacenado. Para que la red neuronal ejecute una tarea es preciso entrenarla, en terminología estadística se puede decir que es necesario estimar los parámetros. En realidad todo el procedimiento que vemos en la figura 1.1 es estadístico: primero se selecciona un conjunto de datos, o patrones de aprendizaje. Después se desarrolla la arquitectura neuronal, número de neuronas, tipo de red. En otras palabras, se selecciona el modelo y el número de variables dependientes e independientes. Se procede a la fase de aprendizaje o estimación del modelo y luego se validan los resultados [2].
Figura 1.1 Procedimiento para operar con redes neuronales
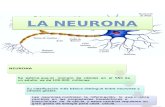
1.1.2 Breve introducción biológica El sistema nervioso esta compuesto por una red de células (neuronas), ampliamente interconectadas entre si. En las neuronas, la información fluye desde las dendritas hacia el axón, atravesando el soma. Tal como se muestra en la siguiente figura.

14
Figura 1.2 Neurona biológica
Desde el punto de vista funcional, las neuronas constituyen procesadores de información sencillos. Posee un canal de entrada de información (las dendritas), un órgano de cómputo (el soma), y un canal de salida (el axón). La unión de dos neuronas se denomina sinapsis. Se habla de neuronas pre sinápticas (que envían señales) y pro sinápticas (que las reciben). Las sinapsis son direccionales, es decir, la información fluye en un solo sentido. Cada neurona recibe impulsos procedentes de otras neuronas (entradas) a través de las dendritas, que están conectados a las salidas de otras neuronas por las sinapsis. Las sinapsis, alteran la efectividad con la que la señal es transmitida a través de un parámetro (el peso). El aprendizaje resulta de la modificación de estos pesos. Que unido al procesamiento de información de la neurona determinan el mecanismo básico de la memoria. El soma de la neurona recibe todas estas entradas y emite una señal de salida, si la entrada total supera el valor umbral. Esta salida se transmite a través del axón desde donde se propaga mediante diferencias de potencial a las dendritas de otras neuronas [3].
Figura 1.3 Enlaces neurona biológica

15
1.2 Características principales de las Redes Neuronales 1.2.1 Elementos de una red neuronal artificial Existen varias formas de nombrar una neurona artificial, es conocida como nodo, neuronodo, celda, unidad o elemento de procesamiento (PE); En la figura 1.4 se observa un PE en forma general y su similitud con una neurona biológica
Figura 1.4 Neurona biológica y neurona artificial El modelo de una neurona artificial es una imitación del proceso de una neurona biológica, puede también asemejarse a un sumador hecho con un amplificador operacional tal como se ve en la siguiente figura.
Figura 1.5 Modelo de una neurona artificial
De la observación detallada del proceso biológico se han hallado los siguientes análogos con el sistema artificial:
• Las entradas iX representan las señales que provienen de otras neuronas
• Los pesos iW ; tanto iX como iW son valores reales.

16
• “ b ” es la función umbral que la neurona debe sobrepasar para activarse; este proceso ocurre biológicamente en el cuerpo de la célula.
Las señales de entrada a una neurona artificial X1,X2,..,Xn son variables continuas en lugar de pulsos discretos, como se presentan en una neurona biológica. Cada señal de entrada pasa a través de una ganancia o peso, estos pesos pueden ser positivos (excitatorios), o negativos (inhibitorios), el nodo sumatorio acumula todas las señales de entradas multiplicadas por los pesos o ponderadas y las pasa a la salida a través de una función umbral o función de transferencia [4]. Cada neurona j tiene en cada instante t un valor de activación ( )ta j , que puede ser
discreto o continuo. La salida de cada neurona j se obtiene mediante una función de salida jf de su estado
de activación, según ( )( )tafy jjj = .
A cada neurona j llegan las salidas de todas las i neuronas que están conectadas a ella,
modificadas por los pesos de conexión jiw de cada una por ∑=
=N
ijiij wyNet
1
donde los
pesos jiw son una magnitud asociada a cada conexión de la neurona j con las i a las que
se encuentran conectadas sus entradas. Una función de activación, F, determina el nuevo estado de activación ( )1+ta j de la
neurona, teniendo en cuenta la entrada total calculada y el anterior estado de activación ( )ta j .
1.2.2 Estado de activación Además del conjunto de neuronas, la representación necesita considerar los estados del sistema en un tiempo t. esto especifica por un vector de N números reales A(t), que representa el estado de activación del conjunto de neuronas. Cada elemento del vector representa la activación de la unidad en el tiempo t. si la activación de la unidad jU en el tiempo t se designa por ( )ta j , se tiene:
( ) ( ))(),...,(),( 21 tatatatA N= (1.1)
Es necesario además saber los criterios o reglas que siguen las neuronas para alcanzar estos estados de activación. Esto depende de dos factores:

17
• Dado que el comportamiento de las redes no es producto de la actuación de cada neurona individualmente, sino del conjunto como un todo, es necesario conocer el mecanismo de interacción entre ellas. El estado de activación estará influenciado por estas interacciones, dado que el efecto que producirá una neurona sobre otra será proporcional a la fuerza, peso o magnitud de la conexión entre ambas.
• La señal que envía cada neurona a sus vecinas depende de su propio estado de
activación. 1.2.3 Función o regla de activación Así como es necesaria una regla que combine las entradas a una neurona con los pesos de sus conexiones, también se requiere una regla que combine las entradas con el estado actual de la neurona, para producir un nuevo estado de activación. Esta función, f, produce un nuevo estado a partir del estado ( )ta j .
Dado el estado de activación ( )ta j de la neurona jU y la entrada total que llega a ella,
jNet el estado de activación siguiente ( )1+ta j se obtiene aplicando la función de
activación f:
( ) ( )( )jjj Nettafta ,1 =+ (1.2)
Y de lo dicho anteriormente se tiene
( ) ( ) ( )∑ ===+ N
i ijijj ywfNetfty1
*1 (1.3)
Normalmente la función de activación no esta centrada en el origen del eje que representa el valor de la entrada neta, sino que existe cierto desplazamiento debido a las características internas de la propia neurona, y que no es igual a todas ellas. Este valor se denota como jb , y representa el umbral de activación de la neurona j.
( ) ( ) ( )j
N
i ijijjj bxwfbNetfty +=+=+ ∑ =1*1 (1.4)
La ecuación 1.4 se puede entender mas fácilmente observando la figura 1.6 que aparece a continuación

18
Figura 1.6 Neurona artificial 1.2.4 Conexiones entre neuronas Las conexiones entre neuronas de una red tienen asociado un peso, que es el que hace que la red adquiera conocimiento. Una neurona recibe un conjunto de señales que le dan información del estado de activación de todas las neuronas con las que se encuentra conectada. Cada conexión (sinapsis) entre la neurona i y la neurona j esta ponderada por un peso jiW .
Donde ijw son los pesos sinápticos que ponderan las entradas ix y jb es el umbral. f
es la función de activación de la neurona y n es el numero total de pesos sinápticos conectados a la entrada de la neurona. De una forma vectorial el esquema seria el que se ilustra en la siguiente figura:
Figura 1.7 Forma compacta de la neurona artificial El vector de entrada p es representado por la barra sólida vertical a la izquierda, las dimensiones de x son mostradas en la parte inferior de la variable como Rx1 indicando

19
que el vector de entrada es un vector fila de R elementos. Las entradas van a la matriz de pesos W, la cual tiene R columnas y sólo una fila para el caso de una sola neurona. Una constante 1 entra a la neurona multiplicada por la ganancia escalar b. La salida de la red a es en este caso un escalar, si la red tuviera más de una neurona Y, sería un vector. A continuación en la figura 1.7 se muestra una grafica a modo de ejemplo de cómo funciona una neurona artificial.
Figura 1.8 Modo básico de funcionamiento
1.2.5 Función de salida o de transferencia Entre las neuronas que componen la red existe un conjunto de conexiones que las unen. Cada neurona transmite señales a aquellas que están conectadas con su salida. Asociada a cada unidad jU hay una función de salida ( )( )taf jj , que transforma el estado actual
de activación ( )ta j en una señal de salida ( )ty j ; es decir:
( ) ( )( )tafty jjj = (1.5)
En consecuencia, el vector que contiene las salidas de todas las neuronas en un instante t es:
( ) ( ) ( ) ( ) ( )( )taftaftaftaftY NNjj 12211 ,...,,...,,= (1.6)
A continuación se muestra en la tabla 1.1 una relación de las principales funciones de transferencia empleadas en el Simulink de MATLAB para redes neuronales.

20
Tabla 1.1 Funciones de activación 1.2.6 Estructura de un sistema neuronal artificial Los sistemas neuronales artificiales imitan la estructura del hardware del sistema nervioso, con la intención de construir sistemas de procesamiento de información paralelos, distribuidos y adaptables, que puedan presentar un cierto comportamiento “inteligente”.

21
Figura 1.9 Estructura jerárquica de un sistema basado en RNA
Cada neurona realiza una función matemática. Las neuronas se agrupan en capas, constituyendo una red neuronal. Una determinada red neuronal esta construida y entrenada para llevar a cabo una labor especifica. Finalmente, una o varias redes, mas las interfaces con el entorno, conforman el sistema global. Generalmente se pueden encontrar tres tipos neuronas:
• Las unidades de entrada reciben señales desde el entorno. Estas entradas (que son entradas a la red) pueden provenir de sensores o de otros sectores del sistema.
• Las unidades ocultas son aquellas cuyas entradas y salidas se encuentran dentro
del sistema, es decir, no tienen contacto con el exterior.
• Una vez que ha finalizado el procesamiento, la información llega a las unidades de salida, cuya misión es dar la respuesta del sistema.
La compleja operación es el resultado de abundantes lazos de realimentación junto con no linealidades de los elementos de proceso y cambios adaptables de sus parámetros, que pueden llegar a definir fenómenos dinámicos complicados. Los modelos neuronales se diferencian en la función que incorpora la neurona, su organización y forma de las conexiones [5]. 1.2.7 Formas de conexión entre neuronas La conectividad entre los nodos de una red esta relacionada con la forma en que las salidas de las neuronas están organizadas para convertirse en entradas de otras neuronas. La señal de salida de un nodo puede ser una entrada de otro elemento de proceso, o incluso ser una entrada de si mismo en una conexión auto recurrente.

22
Cuando ninguna salida de las neuronas de una capa es entrada de neuronas del mismo nivel o de niveles procedentes, se dice que la red tiene propagación hacia delante como la red que se muestra en la figura 1.10. En caso contrario se dice que la red es de propagación hacia atrás. Las redes de propagación hacia atrás como se muestra en la figura 1.11 que tienen lazos cerrados se dice que son sistemas recurrentes.
Figura 1.10 Estructura de una red multinivel con las conexiones hacia adelante
Figura 1.11 Estructura ejemplos de conexiones con propagación hacia atrás
Dentro de una red neuronal, los elementos de procesamiento se encuentran agrupados por capas, una capa es una colección de neuronas; de acuerdo a la ubicación de la capa en la red neuronal artificial, esta recibe diferentes nombres
• Capa de entrada: Recibe las señales de la entrada de la red.

23
• Capas ocultas: Estas capas son aquellas que no tienen contacto con el medio exterior, sus elementos pueden tener diferentes conexiones y son éstas las que determinan las diferentes topologías de la red.
• Capa de salida: Recibe la información de la capa oculta y transmite la respuesta
al medio externo. Una red de una sola capa con un número S de neuronas, se observa en la figura 1.11 en la cual, cada una de las R entradas es conectada a cada una de las neuronas, la matriz de pesos tiene ahora S filas.
Figura 1.12 Red de una sola capa
Ahora, si se considera una red con varias capas, o red multicapa, cada capa tendrá su propia matriz de peso W, su propio vector de ganancias b, un vector de entradas netas n, y un vector de salida a. tal como se muestra en la siguiente figura.
Figura 1.13 Red multicapa

24
1.3 Principales tipos de Redes Neuronales En general las redes neuronales se pueden clasificar de diversas maneras, según su topología, forma de aprendizaje (supervisado o no supervisado), tipos de funciones de activación, valores de entrada (binarios o continuos); un resumen de esta clasificación se observa en la siguiente figura.
Figura 1.14 Principales tipos de RNA
De los distintos modelos de Redes Neuronales actualmente existentes, el que ha sido más ampliamente utilizado en tareas de identificación de sistemas y control es el conocido como Perceptrón Multicapa, gracias a su capacidad para aproximar la dinámica de cualquier sistema. 1.3.1 Redes Neuronales Supervisadas y No Supervisadas Las redes neuronales se clasifican comúnmente en términos de sus correspondientes algoritmos o métodos de entrenamiento: redes de pesos fijos, redes no supervisadas, y redes de entrenamiento supervisado. Para las redes de pesos fijos no existe ningún tipo de entrenamiento [6]. 1.3.1.1 Aprendizaje supervisado Si la red utiliza un tipo de aprendizaje supervisado se deben proporcionarle parejas de patrones entrada-salida y la red neuronal aprende a asociarlos. En terminología estadística equivale a los modelos en los que hay vectores de variables independientes y dependientes: técnicas de regresión, análisis discriminante, modelos de series temporales, etc.

25
En este tipo de aprendizaje existen tres formas:
• Aprendizaje por corrección de error
• Aprendizaje por refuerzo
• Aprendizaje estocástico 1.3.1.1.1 Aprendizaje por corrección de error Consiste en ajustar los pesos de las conexiones de la red en función de la diferencia entre los valores deseados y los obtenidos en la salida; es decir, en función del error cometido. Una regla o algoritmo simple de aprendizaje por error podría ser:
( )jjiji ydyw −=∆ α (1.7)
Figura 1.15 Aprendizaje por corrección de error
Donde
jiW∆ : variación en el peso de la conexión entre las neuronas i y j
anterior
jiactual
jiji www −=∆ (1.8)
iy : Valor de la salida de la neurona i.
jd : valor de salida deseado para la neurona j.

26
jy : valor de salida obtenido de la neurona j.
α : factor de aprendizaje (0 < α <= 1) que regula la velocidad del aprendizaje. Un ejemplo de este tipo de algoritmo es la regla de aprendizaje del perceptron. Este presenta algunas limitaciones, como no considerar la magnitud del error global cometido durante todo el proceso de aprendizaje, sino que considera solamente los errores locales de cada información por separado. 1.3.1.1.2 Aprendizaje por refuerzo Es un aprendizaje supervisado mas lento que el anterior, que se basa en no disponer de un ejemplo completo del comportamiento deseado; es decir, no indicar exactamente la salida que se desea que proporcione la red ante una determinada entrada. En este aprendizaje la función del supervisor se reduce a indicar mediante una señal de refuerzo si la salida obtenida se ajusta a la deseada (éxito = +1, fracaso = -1), y en función de ello se ajustan los pesos. 1.3.1.1.3 Aprendizaje estocástico Este tipo de aprendizaje consiste básicamente en realizar cambios aleatorios a los pesos de las conexiones de la red y evaluar su efecto a partir de objetivo deseado y de distribuciones de probabilidad. 1.3.1.1.4 Reglas de entrenamiento Supervisado Las redes neuronales de entrenamiento supervisado son las más populares. Los datos para el entrenamiento están constituidos por varios pares de patrones de entrenamiento de entrada y de salida. El hecho de conocer la salida implica que el entrenamiento se beneficia de la supervisión de un maestro. Dado un nuevo patrón de entrenamiento, en la etapa (m + 1)-ésima, los pesos se adaptan de la siguiente forma [7]:
mij
mij
mij www ∆+=+1
(1.9)
Se puede ver un diagrama esquemático de un sistema de entrenamiento supervisado en la figura:

27
Figura 1.16 Reglas de entrenamiento supervisado
1.3.2.1 El aprendizaje no supervisado o autoorganizado Si el entrenamiento es no supervisado, únicamente debemos suministrar a la red los datos de entrada para que extraiga los rasgos característicos esenciales. En terminología estadística equivale a los modelos en los que solo hay vectores de variables independientes y buscan el agrupamiento de los patrones de entrada: análisis de conglomerados o cluster, escalas multidimensionales, etc. 1.3.2.2 Reglas de Entrenamiento No Supervisado Para los modelos de entrenamiento no supervisado, el conjunto de datos de entrenamiento consiste sólo en los patrones de entrada. Por lo tanto, la red es entrenada sin un maestro. La red aprende a adaptarse basada en las experiencias recogidas de los patrones de entrenamiento anteriores. Un esquema típico de un sistema no supervisado es el que se muestra en la siguiente figura.
Figura 1.17 Entrenamiento no supervisado
Ejemplos típicos son la Regla de Aprendizaje de Hebb, y la Regla de Aprendizaje Competitivo. En el aprendizaje competitivo, si un patrón nuevo pertenece a una clase reconocida previamente, entonces la inclusión de este nuevo patrón a esta clase matizará la representación de la misma. Si el nuevo patrón no pertenece a ninguna de las clases

28
reconocidas anteriormente, entonces la estructura y los pesos de la red neuronal serán ajustados para reconocer a la nueva clase [8]. 1.3.3 Perceptrón Es un modelo de Red Neuronal artificial que representa la forma más simple de una red neuronal utilizada para la clasificación de patrones que son linealmente separables, es decir, patrones que se encuentran en lados opuestos de un “hiperplano”. Para comprender su funcionamiento se debe estudiar el comportamiento de una sola neurona. Un ejemplo para dos entradas puede verse en la Figura-1.18.
Figura 1.18 Perceptrón
Donde la neurona realiza la suma ponderada de las entradas, resta el umbral y pasa el resultado a una función de transferencia de tipo escalón. La regla de decisión es responder 1 cuando el patrón pertenece a la clase R, o –1 si es a la clase F. Por tanto, la salida dependerá de la entrada neta a la neurona de salida y del umbral b = U. Este modelo sólo es capaz de discriminar patrones muy sencillos linealmente separables. Para dos entradas la separación se realiza por una línea recta, para tres mediante un plano, y para n mediante un “hiperplano”. Como puede deducirse de lo expuesto, no se han definido realimentaciones entre neuronas, ya que el objetivo de clasificar patrones en la forma que se ha apuntado no la requiere. Este hecho facilitará el análisis de la red ya que hará innecesaria la realización de estudios de estabilidad. Facilitará, así mismo, la definición de unos mecanismos de aprendizaje razonablemente simples [9].

29
1.3.3.1 Regla de aprendizaje del Perceptrón El algoritmo de aprendizaje empleado por el Perceptrón es del tipo “Supervisado”, es decir se necesita conocer la clasificación deseada para cada vector de entrada introducido en la red. El algoritmo original obedece a una expresión que permite la modificación sucesiva de los pesos kw (t+1) de las conexiones de entrada en función de
los pesos anteriores kw (t), la salida deseada d(t) para la entrada pi, la salida realmente
obtenida ( )ty y un factor de ganancia β que regula la velocidad de convergencia. Su forma es [10]:
kw ( t + 1) = kw ( t ) + β [d( t )− y( t )]·p( t ) (1.10)
Como el Perceptrón es un tipo de red de aprendizaje supervisado, es decir necesita conocer los valores esperados para cada una de las entradas presentadas; su comportamiento está definido por pares de esta forma: { } { } { }nn tptptp ,,.....,,,, 2211 (1.11)
El proceso de aprendizaje del Perceptrón puede definirse en tres reglas, las cuales cubren la totalidad de combinaciones de salidas y sus correspondientes valores esperados. Estas reglas utilizando la función de transferencia hardlim, se expresan como sigue:
viejonuevo
viejonuevo
viejonuevo
wwat
pwwayt
pwwayt
11
11
11
10
01
=→=
−=→==
+=→==
(1.12)
Las tres condiciones anteriores pueden ser escritas en forma compacta y generalizarse para la utilización de las funciones de transferencia hardlim o hardlims, generalización que es posible introduciendo el error en las reglas de aprendizaje del Perceptrón:
ate −= (1.13) Por lo tanto:
viejonuevo
viejonuevo
viejonuevo
wwe
pwwe
pwwe
11
11
11
0
1
1
=→=
−=→−=
+=→=
(1.14)

30
En una sola expresión la ley puede resumirse así:
( )atpwepww viejoviejonuevo −+=+= 111 (1.15)
ebb viejonuevo += (1.16)
1.3.3.2 Perceptrón multicapa En el problema de la función XOR se explicó como un Perceptrón multicapa había sido implementado para hallar una solución, el esquema general de un Perceptrón multicapa con múltiples entradas y que incluya una entrada adicional representada por la ganancia b, este esquema general se ve en la figura 2.1.17 en donde se notan las conexiones entre sus nodos de entrada y las neuronas de salida.
Figura 1.19 Conexiones del Perceptrón
Un Perceptrón multicapa es una red con alimentación hacia delante, compuesta de varias capas de neuronas entre la entrada y la salida de la misma, esta red permite establecer regiones de decisión mucho más complejas que las de dos semiplanos, como lo hace el Perceptrón de un solo nivel. Las capacidades del Perceptrón multicapa con dos y tres capas y con una única neurona en la capa de salida se muestran en la Tabla 1.2 extraída del libro de Hilera J y Martínez V [12]. En la segunda columna se muestra el tipo de región de decisión que se puede formar con cada una de las configuraciones, en la siguiente se indica el tipo de región que se formaría para el problema de la XOR, en las dos últimas columnas se muestran las regiones formadas para resolver el problema de clases mezcladas y las formas más generales para cada uno de los casos [11].

31
Tabla 1.2 Capacidades del Perceptrón multicapa 1.3.4 Backpropagation Una vez aplicado un patrón de entrenamiento a la entrada de la red, este se propaga desde la primera capa a través de las capas subsecuentes de la red, hasta generar una salida, la cual es comparada con la salida deseada y se calcula una señal de error para cada una de las salidas, a su vez esta es propagada hacia atrás, empezando de la capa de salida, hacia todas las capas de la red hasta llegar a la capa de entrada, con la finalidad de actualizar los pesos de conexión de cada neurona, para hacer que la red converja a un estado que le permita clasificar correctamente todos los patrones de entrenamiento. La estructura general se muestra en la Figura. 1.
Figura 1.20 Modelo de la RNA Backpropagation

32
1.3.4.2 Algoritmo de entrenamiento de la Red Backpropagation A continuación se presenta el algoritmo empleado para el entrenamiento de la RNA Backpropagation.
1. Inicializar los pesos de la red (w) con valores aleatorios pequeños. 2. Mientras la condición de paro sea falsa realizar los pasos (3-6). 3. Se presenta un patrón de entrada, ( pipp xxx ,....,, 21 ) y se específica la salida
deseada que debe generar la red (dp1
, dp2,
…,dpk
).
4. Se calcula la salida actual de la red, para ello se presentan las entradas a la red y
se va calculando la salida que presenta cada capa hasta llegar a la capa de salida ( )kyyy ,...,, 21 . Los pasos son los siguientes:
a) Se determinan las entradas netas para las neuronas ocultas procedentes de las neuronas de entrada.
∑=
+=m
i
hipi
hji
hpj bxwNet
1
(1.17)
b) Se aplica la función de activación a cada una de las entradas de la neurona oculta para obtener su respectiva salida.
+== ∑=
hipi
m
i
hji
hpj
hjpj bxNfy
1
(1.18)
c) Se realizan los mismos cálculos para obtener las respectivas salidas de las neuronas de la capa de salida.
∑=
+=m
j
okpj
okj
opk bywN
1
; (1.19)
+== ∑
=
m
j
okpj
okj
opk
okpk bywNfy
1 (1.20)
5. Determinación de los términos de error para todas las neuronas: a) Cálculo del error (salida deseada–salida obtenida).
( )pkpk yde −= (1.21)

33
b) Obtención de la delta (producto del error con la derivada de la función de activación con respecto a los pesos de la red).
( )opk
ok
opk Nfe*=δ (1.22)
6. Actualización de los pesos. Se emplea el algoritmo recursivo del gradiente descendente, comenzando por las neuronas de salida y trabajando hacia atrás hasta llegar a la capa de entrada. a) Para los pesos de las neuronas de la capa de salida:
( ) ( ) ( )11 +∆+=+ twtwtw okj
okj
okj (1.23)
( ) pjopk
okj ymiutw δ=+∆ 1 (1.24)
b) Para los pesos de las neuronas de la capa oculta:
( ) ( ) ( )11 +∆+=+ twtwtw hji
hji
hji ; (1.25)
( ) pihpj
hji xmiutw δ=+∆ 1 (1.26)
7. Se cumple la condición de paro (error mínimo ó número de iteraciones alcanzado logrado). 1.3.5 La regla delta generalizada Este algoritmo utiliza también una función de error asociada a la red, buscando el estado estable de mínimo. Por esto, realimenta el error del sistemas para realizar la modificación de los pesos en un valor proporcional al gradiente decreciente de dicha función de error. El algoritmo funciona de la siguiente forma: El método que sigue la regla delta generalizada para ajustar los pesos en actualizarlos de forma proporcional a la delta o diferencia entre la salida deseada y la obtenida ( salida deseada – salida obtenida) Dada una neurona iU y la salida que produce, iy , tal como se muestra en la figura 1.21

34
Figura 1.21 Regla delta generalizada
El cambio que se produce en el peso de la conexión que une la salida de dicha neurona con la unidad jU ( )jiw para un patrón de aprendizaje p determinado es:
( ) pipjji ytw αδ=+∆ 1 (1.17)
Donde el subíndice p se refiere al patrón de aprendizaje concreto y α es la constante o tasa de aprendizaje. El punto en que difiere la regla delta generalizada de la regla delta es en el valor concreto de pjδ . Por otro lado, en la redes multicapa a diferencia de las redes sin
neuronas ocultas, en principio no se puede conocer la salida deseada de las neuronas de las capas ocultas para poder determinar los pesos en función del error cometido. Sin embargo, inicialmente si se puede conocer la salida deseada de la neuronas de salida. Según esto, si se considera la unidad jU de salida, entonces:
( ) ( )jpjpjpj Netfyd '−=δ (1.18)
Donde pjd es la salida deseada de la neurona j para el patrón p y jnet es la
entrada neta que recibe la neuronaj . Esta formula es como la de la regla delta, excepto en lo que se refiere a la derivada de la función de transferencia. Este término representa la modificación que hay que realizar en la estrada que recibe la neurona j . En caso en que dicha neurona no sea de salida, el error que se produce estará es función del error que se cometa en las neuronas que reciban como entrada la salida de dicha neurona. Esto es lo que se denomina el procedimiento de propagación del error hacia atrás. Según esto, en el caso de que jU no sea una neurona de salida, el error que se produce
esta en función del error que se comete en las neuronas que reciben como entrada la salida de jU :

35
( ) ( )jkjpkpj Netfw '∑= δδ (1.19)
Donde el rango k cubre todas aquellas neuronas a las que esta conectada la salida de
jU . De esta forma, el error que produce en una neurona oculta es la suma de los errores
que se producen en las neuronas a las que esta conectada la salida de ésta, multiplicando cada uno de ellos por el peso de la conexión. 1.3.5.1 Adición de un momento a la regla delta generalizada El método de propagación del error, también conocido como el gradiente descendiente, requiere un importante número de cálculos para lograr el ajuste de los pesos en la red. En la implementación del algoritmo, se toma una amplitud de paso que viene dada por la tasa de aprendizaje α . A mayor tasa de aprendizaje, mayor es la modificación de los pesos en cada iteración, con lo que el aprendizaje será más rápido, pero, por otro lado, puede dar lugar a oscilaciones. Para filtrar esas oscilaciones se puede añadir en la expresión del incremento de los pesos un termino de momento, β , de manera que dicha expresión quede
( ) ( ) ( ) ( )( )
( ) ( )twytw
twtwytwtw
jipipjji
ijipipjjiji
∆+=+∆
=−−++=+
βαδ
βαδ
1
11
(1.20)
Resumiendo, el algoritmo backpropagation queda finalmente:
( ) ( ) ( )[ ]11 +∆+=+ twtwtw jijiji (1.21)
( ) ( ) ( )[ ]twtwtw jipjjiji ∆++=+ βαδ1 (1.22)
Donde:
( ) ( )jpjpjpj Netfyd '−=δ (1.23)
( )jk
kjpkpj Netfw '
= ∑δδ (1.24)
La reproducción del algoritmo Backpropagation para una red de 2 neuronas de entrada, 2 neuronas en la capa oculta y una neurona de salida se muestra en la figura 1.21

36
Figura 1.22 Backpropagation, red neuronal de 2x 2x1
Donde el error global se muestra en la siguiente grafica
Figura 1.23 Error global de la red de 2x2x1
Ahora para la misma red pero con momento se tiene:

37
Figura 1.24 Error global de la red de 2x2x1 con momento
El cual presenta una mejora en la atenuación del error y la convergencia de los pesos iniciales hasta encontrar los pesos óptimos se muestran en la siguiente grafica.
Figura 1.25 convergencia de los pesos
Como se sabe si se incrementa la cantidad de neuronas el algoritmo entregara mejores resultados, luego a continuación se presenta una red neuronal para el algoritmo backpropagation con 10 neuronas en la capa de entrada 3 neuronas en la capa oculta y 2 neuronas para la capa de salida donde la función de activación utilizada en la capa oculta y en la capa de salida fue la logsig y la rata de aprendizaje, para la capa de entrada y la capa oculta es de 0.5. Los valores iniciales de los pesos están entre 0.5 y 0.9. La implementación de esta red neuronal se muestra en la figura 1.26.

38
Figura 1.26 Red neuronal de 10x3x2

39
Donde el error global tiene la tendencia que se muestra en la siguiente grafica.
Figura 1.27 Error global de la red neuronal de 10x3x2
Donde se puede observar la mejora con respecto a la primer red neuronal simulada y la convergencia de los pesos de la capa de entrada se muestra en la siguiente grafica.
Figura 1.28 Convergencia de los pesos de la red neuronal de 10x3x2

40
CAPÍTULO 2
2. Control Adaptable
Un sistema de control adaptable es un sistema que de forma automática mide las características dinámicas de la planta, las compara con las características dinámicas deseadas y usa la diferencia para variar parámetros ajustables del sistema (generalmente parámetros del controlador) para generar una señal de control que sostenga el funcionamiento óptimo con independencia de las variables ambientales, también el sistema puede medir continuamente su propio funcionamiento de acuerdo con un índice de comportamiento dado y modificar, en caso de ser necesario sus propios parámetros para mantener el funcionamiento óptimo con independencia de los cambios ambientales. En su forma más sencilla, el control adaptable se reduce a la comparación de un estimado de los parámetros con una ley de control y verificar si se cumple. Para determinar el desempeño óptimo del sistema es indicado utilizar el procedimiento de prueba y corrección. Pero es importante que el sistema tenga un único funcionamiento óptimo y que las variaciones de los parámetros no se den con mucha rapidez para que el sistema pueda asumirlas. 2.1 Etapas del control adaptable El control adaptable incluye las siguientes etapas: 1- Identificación las características dinámicas de la planta. La identificación de la planta puede ser necesaria no sólo al inicio del funcionamiento sino también a intervalos o continuamente, para que el control se mantenga actualizado con respecto a los parámetros. Esto supone la aplicación de una señal de prueba y el análisis de resultados. Una identificación adecuada de la planta será el resultado de un conocimiento previo y de la información reunida. 2-Toma de decisiones con base en la identificación de la planta.
Cuando la planta está debidamente identificada y se calculó su índice de funcionamiento, se toma la decisión de cuáles y cómo se deben cambiar las variables

41
según los resultados de la comparación, con el objetivo de procurar el funcionamiento óptimo 3-Acción debida a la decisión tomada
De acuerdo con lo anterior, la decisión tomada provoca una acción inmediata que se traduce en cambios de señales de control. El control adaptable está diseñado para que varíe la señal de control cuando cambian las condiciones ambientales y se verifique el funcionamiento óptimo siempre. Sin embargo cuando un sistema adaptable puede reconocer situaciones anteriores y utiliza lo aprendido para lograr mantener el nivel óptimo se le conoce como un sistema con aprendizaje que es un nivel más alto que el control adaptable, pues no necesita volver a pasar por el proceso de adaptación que experimentó la primera vez [14].
Figura 2.1 Control adaptable
2.2 Tipos de sistemas de control adaptable Los tipos más comunes de sistemas de control adaptable son:
• Control adaptable programado
• Control adaptable con modelo de referencia
• Control adaptable autosintonizable 2.2.1 Control adaptable programado Consiste en programar previo a su uso los cambios requeridos en el controlador para adaptarse a las diferentes situaciones en las que tiene que operar. Como consecuencia se necesita un conocimiento previo del proceso una cuantificación de cómo deben

42
cambiarse los parámetros del controlador ante cambios en las características del proceso. Su esquema de funcionamiento se presenta en la siguiente figura [15].
Figura 2.2 Control adaptable programado
Su diseño se puede afrontar de dos modos diferentes
• Se prepara una ecuación (o una tabla), preprogramada en función del conocimiento del proceso, que de los valores que tiene que tener los parámetros del controlador en función de los valores de las variables de entrada y salida al sistema
• Se subdivide el espacio de las variables de operación (entrada y salida) en un
conjunto de regiones y se propone para cada una de ellas un conjunto de valores de los parámetros del controlador
2.2.2 Control adaptable con modelo de referencia (MRAC) El componente clave de un sistema MRAC es el modelo de referencia. Este debe consistir en un modelo de lazo cerrado de cómo el sistema debe responder a los cambios en el punto de consigna. Este Puede ser:
• Una trayectoria de referencia
• Un modelo detallado de lazo cerrado El programa de adaptación suele ser un algoritmo de optimización de parámetros que minimiza (o maximiza) una determinada función objetivo, luego este tipo de controlador sólo se podrá implementar cuando se disponga de un buen modelo de referencia que entregue un buen resultado en cada momento. Su esquema de funcionamiento se ilustra en la figura que se muestra a continuación [16].

43
Figura 2.3 Control adaptable con modelo de referencia
2.2.3 Control adaptable autosintonizable Este tipo de controladores toman valores en continuos de las variables de entrada y salida para estimar en línea los valores de los parámetros de un modelo aproximado del proceso. De esta forma los cambios que ocurren con el tiempo en el sistema real (no lineal) son modelados mediante un proceso lineal cuyos parámetros van cambiando con el tiempo para ajustarse lo máximo posible al sistema real. El modelo lineal actualizado, es usado en continuo en combinación con un procedimiento pre-especificado de diseño de controladores para generar los parámetros del controlador que se van a aplicar en cada momento. Su esquema de funcionamiento se muestra continuación [17].
Figura 2.4 Control adaptable autosintonizable

44
2.3 Sistemas de control basados en redes neuronales artificiales 2.3.1 Arquitecturas de neurocontrol Los modelos más exitosos realizados hasta el momento, recurriendo a la fusión de estas dos teorías incluyen desde la identificación hasta controladores de optimización utilizando modelos del proceso. Básicamente se trata de encontrar una representación óptima de la red neuronal que minimice una función objetivo J sobre el espacio de los pesos de la red (w). Donde NN indica que la formulación del problema de optimización se refiere a una red neuronal.
( )wJNN min: (2.1)
A continuación se presentan de forma general las diferentes arquitecturas para los usos de las redes neuronales en el campo del control:
- Arquitecturas para el modelado de sistemas.
- Identificación y control de sistemas dinámicos mediante redes neuronales
- Neurocontroladores Indirectos.
- Neurocontroladores Directos.
Son cuatro familias de arquitecturas para la aplicación de las RNAs en sistemas de modelado y control. En primer lugar se tiene las arquitecturas de modelado de sistemas, donde se utiliza una red neuronal para imitar el comportamiento de un elemento físico real. Con este objetivo se desarrollan cuatro propuestas.
En el esquema de neurocontroladores indirectos, la red neuronal no envía señales de control directamente al importancia en el proceso. Este indicador puede ser un modelo que se comporta de forma similar al proceso ó bien un parametrizador que ajusta a un controlador produciendo configuraciones apropiadas basadas en el comportamiento de dicho proceso.
En el esquema de un neurocontrol directo, una red neuronal es empleada como un controlador de retroalimentación que envía señales directamente al proceso. Dependiendo del concepto del diseño, los elementos del neurocontrolador directo se categorizan principalmente atendiendo su dependencia al modelo del sistema [18].

45
2.3.1.1 Arquitecturas para el modelado de sistemas
Existen principalmente cuatro arquitecturas de RNA para el modelado de plantas, como son: Modelado básico, modelado inverso de la planta, modelado inverso especializado y modelado del operador.
Para el modelado especializado inverso, el error se forma de la salida de la planta y la salida de la red es la entrada a la planta.
Modelado básico o directo de la planta
Su arquitectura básica es muy simple, tanto la señal de control como los estados de la planta son muestreados y conforman el vector de entrada a la red. La salida de la red se calcula y se compara con las mediciones de la salida de la planta. La diferencia entre esas dos cantidades es usada para ajustar el vector de ajuste de pesos tendiente a reducir el error de la red. En la figura 2.5 se enseña su esquema de funcionamiento [19].
Figura 2.5 Modelado básico o directo de la planta
Modelado directo inverso de la planta
El objetivo con este modelado es formular un controlador tal, que junto con la arquitectura de la planta se conforme una sola función de transferencia. Inevitablemente los errores del modelado perturban dicha función, por lo que se recurre al uso de un precompensador en adición del controlador lineal, lo cual generalmente provee buen rendimiento para una amplia gama de plantas no lineales [20].

46
Figura 2.6 Modelado directo inverso de la planta
Modelado especializado inverso de la planta Este tipo de modelado utiliza una estructura similar al modelado inverso, donde existe una función de transferencia única, solo que el método propuesto es diferente. Un modelo de la planta básico es construido como primer paso, la diferencia entre la respuesta de la planta y la salida deseada es usada para generar la señal de error la cual es pasada hacia atrás desde el modelo básico con el objeto de ajustar los parámetros del nuevo modelo inverso [21].
Figura 2.7 Modelado especializado inverso de la planta
Modelado de Operador
El algoritmo de aprendizaje esta ejecutándose en paralelo con una planta conducida por un operador experto y sus respuestas forman la salida deseada de la red. Estas señales de entrenamiento contienen altas cantidades de ruido dado que el operador usa diferentes acciones para entradas similares, por lo que la señal deberá filtrarse antes de que los algoritmos convencionales de aprendizaje para la red sean aplicados [22].

47
Figura 2.8 Modelado de Operador
2.3.1.2 Identificación y control de sistemas dinámicos mediante redes neuronales Identificación de sistemas dinámicos Las redes neuronales de tipo feedforward como redes recurrentes, se recomiendan para la identificación de sistemas dinámicos. El desarrollo de redes neuronales para identificación, se ha realizado sobre arquitecturas clásicas de tipo perceptron multicapa donde la dinámica del sistema se representa por datos pasados, tanto de entradas como de salidas del sistema que son alimentadas a la entrada de la red. En el caso lineal esto equivaldría a un modelo ARX. Las redes neuronales recurrentes no requieren del uso de señales retardadas pues tienen dinámica interna propia. La identificación de sistemas dinámicos puede realizarse de dos formas, con entrenamiento off-line (fuera de línea) o con entrenamiento on-line (en línea). En el entrenamiento off-line se usa un archivo generado con la historia de las entradas y salidas del sistema para entrenar la red, sin embargo para propósitos de control adaptable de procesos no lineales, se requieren algoritmos de entrenamiento on-line para proveer una notable mejoría en la exactitud del sistema modelado y ajustar los parámetros de la red de acuerdo a los cambios que ocurran en el proceso [23]. Identificación de sistemas no lineales con redes neuronales La identificación de un sistema usando redes neuronales es básicamente un problema de correspondencia no lineal entre las entradas y salidas del sistema. Un modelo llamado "serie-paralelo" describe la dinámica del sistema basado en los datos de entrada y de salida del sistema. Este modelo puede ser un modelo del tipo NARMAX y asume que la nueva salida del sistema puede ser predicha desde sus entradas y salidas pasadas. El modelo arriba descrito, puede ser representado por la siguiente ecuación

48
( ) ( ) ( ) ( ) ( ) ( ) ( )( )mkukukunkykykyfkyp −−−−−−= ,......,2,1,,.......,2,1 (2.2)
donde [u(k), y(k)], representan el par de entrada-salida en el tiempo k, n y m son respectivamente el número de salidas pasadas (llamada también el orden del sistema) y el número de entradas pasadas y 'f', puede ser una función no lineal que mapea las entradas y salidas pasadas para una nueva salida . El modelo descrito (2.2) se ilustra en el siguiente esquema.
Figura 2.9 Identificación de sistemas no lineales con redes neuronales
Una aproximación obvia para el sistema modelado es elegir una estructura de red neuronal que desempeñe la misma función. Denotando por ym la salida de la red se tiene:
( ) ( ) ( ) ( ) ( ) ( ) ( )( )mkukukunkykykyfkym −−−−−−= ,......,2,1,,.......,2,1)
(2.3)
En esta expresión, f
) representa el mapa entrada-salida de la red es decir, la
aproximación de f. la red contendrá los valores pasados de entrada y salida al sistema real (la red no tiene realimentación). Luego de un cierto periodo de entrenamiento, la salida de la red será aproximadamente igual a la salida real de la planta, en ese momento la red se puede alimentar a si misma, y entonces posteriormente la red puede ser usada independientemente de la planta, luego el modelo de red se describe por [24]:
( ) ( ) ( ) ( ) ( ) ( ) ( )( )mkukukunkykykyfkym −−−−−−= ,......,2,1,,.......,2,1 (2.4)

49
2.3.1.3 Neurocontroladores indirectos Los esquemas de control indirecto (figura 2.10) tienen su nombre debido a la necesidad de un modelo neuronal de la planta para obtener el controlador. Este modelo puede servir para propagar los errores hacia atrás y permitir el aprendizaje del controlador o para generar un modelo invertido de la planta.
Figura 2.10 Esquema de control indirecto con redes neuronales
Los diferentes tipos de neurocontroladores indirectos son:
• Controlador neuronal basado en modelo completo. • Controlador neuronal basado en modelo paramétrico ó parcial. • Modelo inverso neuronal. • Parametrizador de controladores basado en Redes Neuronales Artificiales.
2.3.1.4 Neurocontroladores directos El esquema de control directo (figura 2.11) es muy sencillo estructuralmente y mas complicado en aspectos funcionales. En este caso, la señal con la que la red aprende corresponde a la diferencia entre la señal de control idónea y la señal de control calculada por la red neuronal. El problema esta en que la señal de control idónea no se conoce y, por lo tanto, el error no se puede calcular. Una solución a este problema la dan los algoritmos de aprendizaje por refuerzo, que permiten el aprendizaje con señales cualitativas del error en vez de cuantitativas. Estos métodos, a pesar de tener gran popularidad en inteligencia artificial, están poco adaptados al problema de control de procesos por falta de pruebas formales que puedan asegurar la convergencia en el aprendizaje y la estabilidad de la solución.

50
Figura 2.11 Esquema de control directo con redes neuronales
Los diferentes tipos de neurocontroladores directos son:
- Modelado del controlador.
- Neurocontrolador libre de modelo.
- Neurocontrolador basado en modelo.
- Neurocontrol robusto.

51
CAPÍTULO 3
3. Sistemas de Control Multivariables
En muchos procesos industriales el objetivo consiste en mantener mas de una variable en su set-point o valor deseado, en este tipo de casos se dice que el problema de control es multivariable (lo cual implica que el número de variables a controlar puede ser 2 o mayor de 2). Para ejemplificar el control de sistemas multivariables consideremos el siguiente reactor tanque agitado:
Figura 3.1 Reactor tanque agitado
Donde se desea controlar el nivel, la temperatura y la presión del tanque reactor. En este caso es simple proponer el siguiente apareamiento de lazos de control, como se muestra en la siguiente figura.

52
Figura 3.2 Apareamiento de lazos de control
A dicho esquema de control de sistemas multivariables se le llama esquema de control de lazos múltiples. Esta forma de resolver el problema de control de sistemas multivariables se reduce a diseñar cada lazo de control de manera independiente del resto de los lazos, es decir, sin tomar en cuenta la presencia del resto de los lazos de control. Cada lazo se diseña usando los métodos vistos antes para el control de sistemas uní-variables. Sin embargo, la presencia del efecto de”interacción” hará que el desempeño de un lazo afecte al de los otros y viceversa. En otras palabras, la interacción complica la sintonización de los lazos de manera independiente. Existe otro esquema para resolver el problema del control de sistemas multivariables y se basa en el uso de un solo controlador que manipula simultáneamente todas las variables manipuladas cuando algún o algunas variables controladas se alejan de su set-point. De esta forma se consigue compensar por el efecto de interacción. Este esquema se muestra en la siguiente figura [25].
Figura 3.3 Controlador multivariable
En sistemas multivariables la interacción entre variables es el efecto más importante en el diseño y sintonización de lazos de control. Se dice que un proceso presenta interacción cuando una variable de entrada afecta a más de una variable de salida. Afecta quiere decir que la variable controlada se aleja de su set-point en virtud de cambios en la variable de entrada.

53
3.1 Análisis de un sistema 2x2 Se desea analizar el problema de control a lazo cerrado de un sistema de 2 entradas y de 2 salidas
Figura 3.4 Sistema de control 2x2
Cuyas funciones de transferencia están dadas por:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )susgsusgsy
susgsusgsy
2221212
2121111
+=+=
(3.1)
Como se puede ver claramente cada una de las entradas (u1, u2) tiene influencia sobre las salidas (y1, y2). La magnitud de tal influencia depende de las ganancias de las funciones de transferencia. En principio si se diseña los lazos de control de manera independiente (suponiendo los apareamientos u1 → y1, u2 → y2) se tiene el siguiente esquema:
Figura 3.5 Apareamientos u1 → y1, u2 → y2
Sin embargo, si la interacción entre las entradas/salidas esta presente el efecto sobre el sistema de control que se representaría como se muestra en la siguiente figura:

54
Figura 3.6 Esquema de interacción entre las entradas sobre las salidas
Cuando el sistema multivariable presenta interacción puede no ser tan claro que apareamiento seleccionar. Para entender este problema supongamos que llevamos a cabo el siguiente experimento [26]: 1. Con todos los lazos de control abiertos realizamos un cambio escalón en 1u . De
acuerdo a lo dicho antes 1y cambiaria (y también lo haría 2y ). Suponiendo que el
sistema sea estable se alcanzaría una respuesta final en 1y denotada por uy1∆ y cuya
magnitud está dada por:
111 ky u =∆ (3.2)
2. Con únicamente el lazo 2 (es decir, el lazo 2u → 2y ) cerrado se hace el mismo experimento. El controlador Gc2 tiene entonces la función de corregir cualquier desviación en 2y (manipulando 2u ) como resultado del cambio escalón efectuado en
1u . Nótese claramente que 1u tiene tanto un efecto directo como indirecto sobre 1y (a
través de la acción de control 2u ). Observaciones.
• 1y cambia a través de g11, pero también cambia 2y (a través de g21).
• Bajo control feedback el lazo 2 ”siente” el efecto de la interacción sobre 2y , y
entonces manipula 2u hasta que y2 regresa a su set-point.
• Sin embargo, los cambios efectuados en 2u afectan ahora a 1y (a través de g12).
Los cambios observados sobre 1y son de dos clases:

55
� El efecto directo de 1u sobre 1y (denotado por uy1∆ ).
� El efecto indirecto que surge cuando el controlador 2 trata de eliminar la
perturbación 1u afectando con esto a 1y (denotemos este efecto por ry1∆ ). Después de que se halla alcanzado el estado estacionario del proceso la respuesta en 1y
(denotada por *1y∆ ) estará dada por:
ru yyy 11*1 ∆+∆=∆ (3.3)
Una medida adecuada del grado de interacción del proceso (suponiendo que 1u
controlara a 1y ) está dada por el siguiente cociente:
ru
uu
yy
y
y
y
11
111*
1
111 ∆+∆
∆=∆∆= λλ (3.4)
Esta cantidad proporciona una medida del grado de interacción que ocurre cuando 1u
controla a 1y , y cuando 2u controla a 2y . 3.2 Apareamiento de lazos de control Usando los valores del índice 11λ resulta más claro como analizar el efecto de un cierto apareamiento sobre la interacción y desempeño del lazo cerrado ya que se esta interesado en elegir el apareamiento con menor grado de interacción.
• ( 11λ = 1) Esto implica que ry1∆ = 0 y por lo tanto cero interacción en el sistema multivariable. En consecuencia seleccionado el acoplamiento:
22
11
yu
yu
→→
El sistema no presenta interacciones. Esto puede indicar:
(*) 1u no tiene efecto sobre 2y . (*) 1u no tiene efecto sobre 2y , pero 2y no tiene efecto sobre 1y .
• ( 11λ = 0) En este caso esto significa que uy1∆ = 0; o sea que 1u no tiene ningún
efecto sobre 1y . Por lo tanto el lazo 1u → 1y no sirve para el propósito de

56
controlar 1y . Posiblemente el lazo 1u → 2y sea mas apropiado ya que en este
caso no existe interacción con 1y .
• ( 11λ > 1) En este caso ry1∆ tiene signo contrario del que tiene uy1∆ (sin
embargo, es menor en valor absoluto). En casos con 11λ muy grande y positiva
el efecto de la interacción prácticamente cancela el efecto de 1u sobre 1y . Por esta razón pueden requerirse valores grandes de la acción de control para este propósito. En general el apareamiento 1u → 1y no seria bueno.
• ( 11λ < 0) Esta situación surge cuando ry1∆ tiene signo contrario del que
presenta uy1∆ (además ry1∆ es mayor en valor absoluto a uy1∆ ). El
apareamiento 1u → 1y no es recomendable ya que la dirección del efecto de 1u
sobre 1y a lazo abierto es la respuesta a la correspondiente dirección con el lazo cerrado. No se recomienda usar apareamientos de este tipo.
• (0 < 11λ < 1) Este caso corresponde a uy1∆ y ry1∆ respondiendo en el mismo
sentido. Para 11λ > .5 nótese que uy1∆ > ry1∆ (el efecto directo es mayor que el
efecto de interacción). Si 11λ < .5 entonces ry1∆ > uy1∆ (la interacción domina
el efecto directo). Cuando 11λ = .5 entonces uy1∆ > ry1∆ y ambos efectos son
igualmente importantes [27]. 3.3 Definición de ganancia relativa La ganancia relativa (ijλ ) entre la salida iy y la entrada ju (o sea, el cociente entre 2
ganancias en estado estacionario) se define como:
∂∂=
j
i
u
ya : todos los lazos abiertos
∂∂=
j
i
u
yb : todos los lazos abiertos, excepto ji ≠
b
aij =λ (3.5)
Normalmente el índice ijλ se calcula para sistemas cuadrados de n entradas y n salidas;
al arreglo resultante de elementos ijλ se denomina el Arreglo de Ganancia Relativa
(RGA) y se denota por:

57
=Λ
nnnn
n
n
λλλ
λλλλλλ
...
......
......
......
...
...
21
22221
11211
(3.6)
3.4 Calculo del arreglo de ganancia relativa Para mostrar la forma de evaluar la RGA se puede usar el caso simple del siguiente sistema de 2x2:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )susgsusgsy
susgsusgsy
2221212
2121111
+=+=
(3.7)
Como en análisis clásico de la RGA se realiza en estado estacionario esto significa que:
( ) ( ) ijij Ksgs =→ 0lim (3.8)
Por lo tanto el sistema original puede reescribirse como:
( ) ( ) ( )( ) ( ) ( )suKsuKsy
suKsuKsy
2221212
2121111
+=+=
(3.9)
Si se evalúa el elemento (1,1) de la RGA:
c
o
u
y
u
y
∂∂
∂∂
=
1
1
1
1
11λ (3.10)
Donde el numerador denota la ganancia con todos los lazos abiertos mientras que el denominador denota la misma ganancia pero con el lazo 2 cerrado. Entonces:
ou
yK
∂∂=
1
111 (3.11)

58
Para evaluar el término c
u
y
∂∂
1
1 recordemos que en esta ocasión el lazo 2 permanece
cerrado. Por lo tanto, cuando se logre mantener a 2y en su set-point deseado, ocurrirá que:
02 =y la acción de control que se debe aplicar para lograr este propósito está dada por:
122
212 u
K
Ku −= (3.12)
ahora bien, la acción de control u2 ejercerá un efecto sobre la respuesta y1, la cual puede obtenerse sustituyendo u2 en la ecuación que define la respuesta para y1:
122
21121111 u
K
KKuKy
−+= (3.13)
esta ecuación representa, por lo tanto, el efecto de u1 sobre y1 cuando el lazo 2 está cerrado:
−=
−=
∂∂
2211
211211
22
211211
1
1 1KK
KKK
K
KKK
u
y
c
(3.14)
Denotando
2211
2112
KK
KK=ζ (3.15)
Se tiene
( )ζ−=
∂∂
1111
1 Ku
y
c
(3.16)
Por lo tanto el elemento (1,1) del RGA está dado por:
( )ζλ
−=
111
1111 K
K
o bien

59
( )ζλ
−=
1
111 (3.17)
de manera semejante se pueden evaluar el resto de los elementos de la RGA:
( ) 22112112 1λλλ
ζζλ ==
−−= (3.18)
Entonces la matriz de RGA (Λ) estará dada por:
( ) ( )
( ) ( )
−−−
−−
−=Λ
ζζζ
ζζ
ζ
1
1
1
11
1
(3.19)
La suma de los elementos individuales de la RGA (λij ) siempre es igual a 1, ya sea que dichos elementos sean sumados horizontalmente o verticalmente. Esto puede apreciarse mas claramente en el ejemplo examinado definiendo
( )ζλλ
−==
1
111 (3.20)
Entonces la matriz de RGA estará dada por
−−
=Λλλ
λλ1
1 (3.21)
En consecuencia para determinar la matriz de RGA para un sistema de 2x2, sólo es necesario determinar el termino λ. Para calcular la RGA en sistemas de orden superior se aconseja utilizar el siguiente método matricial. Sea K la matriz de ganancia en estado estacionario:
( ) ( ) KsGs =→ 0lim (3.22)
Cuyos elementos son las ganancias individuales Kij. La matriz Λ puede obtenerse aplicando la siguiente ecuación:
( )TKK 1−=Λ (3.23)
Donde representa el producto elemento por elemento. Es decir, la operación anterior no denota el clásico producto matricial [28].

60
CAPÍTULO 4
4. Controlador neuronal simple (CNS) y Controlador PID neuronal
4.1 Controlador neuronal simple (CNS) Un controlador neuronal simple (CNS) tiene la siguiente forma
( ) ( ) ( )[ ]{ }( )[ ]θ
θ-eb-exp1
-eb-exp-1,
+== a
peNLtu (4.1)
Donde ( ) ( ) ( )tytyte d −= es el error y p es el vector de parámetros del controlador
definido como
[ ]Tbap θ,,=
Donde a : parámetro con el que representa el controlador el nivel de salida b : pendiente (factor de sensibilidad) θ : el sesgo del controlador neuronal simple El parametro a controla el rango de salida del controlador, un valor grande de a da como resultado un alto nivel de la salida. Tal como se aprecia en la siguiente figura
Figura 4.1 Variación del parámetro a
Para ilustrar esta teoría a continuación se mostraran algunos ensayos variando los parámetros del CNS

61
Variación en a
Figura 4.2 Variación uno de a Figura 4.3 Variación dos de a
Figura 4.4 Variación tres de a
Observaciones
• En la figura 4.2 la señal tiene una magnitud de -0.2 hasta 1
• En la figura 4.3 la magnitud de la señal, rebaja casi hasta la mitad de su valor anterior
• En la figura 4.4 La magnitud de la señal inicial aumento 10 veces
El parámetro b manipula la sensibilidad del controlador en respuesta al error, Además, como se muestra en la figura 4.5, puede ser alterado por el cambio del signo de la pendiente b .

62
Figura 4.5 Variación del parámetro b
Variación en b
Figura 4.6 Variación uno de b Figura 4.7 Variación dos de b
Figura 4.8 Variación tres de b
Observaciones

63
• En la Figura 4.6 la señal de salida se estabiliza en una magnitud de 1 y en un tiempo de 6 segundos
• En la Figura 4.7 la velocidad de respuesta es mucho mayor al aumentar el valor
de b, ya que la señal llega a una magnitud de 1 en un tiempo mucho mas pequeño
• En la Figura 4.8 la velocidad de respuesta es demasiado lenta
Para un controlador neuronal simple el parámetro θ es muy importante, ya que asigna el valor de salida del controlador cuando el error de salida del proceso llega a cero (no compensado). Tal como se muestra en la figura
Figura 4.9 Variación del parámetro θ
Variación en θ
Figura 4.10 Variación uno de θ Figura 4.11 Variación dos de θ

64
Figura 4.12 Variación tres de θ
De las descripciones anteriores, es evidente que la forma como los parámetros varían, las propiedades no lineales del controlador neuronal simple cambiarán, por consiguiente, esta simple estructura del controlador neuronal simple muestra una excelente habilidad para tratar procesos de control no lineales. El esquema de un controlador neuronal de una sola neurona en lazo cerrado es el siguiente:
Figura 4.13 Controlador neuronal simple basado en un esquema de control adaptivo
directo
Donde se tiene un algoritmo de ajuste de parámetros implementado para proveer una habilidad de aprendizaje para el controlador neuronal simple y así determinar como ajustar los componentes del vector de parámetros p tal que la respuesta del sistema se puede utilizar para mejorar el rendimiento. Para este fin se define
( ) )(2
1)()((
2
1)( 22 tetytytE d =−= (4.2)
Con el propósito de minimizar el error cuadrático medio, el siguiente algoritmo de sintonía de parámetros fue propuesto por Chen (2001).

65
( ) ( ) ( ) ( )( ) ( )kzkz
kzkekpkp T+
+=+1
1 η (4.3)
Donde
( ) ( ) ( ) ( )( ) ( )( ) ( ) ( )( )kpkukukykpkykz ,// Φ∂∂=∂∂≡ (4.4)
Derivando la ecuación anterior se tiene que:
dt
TdEtE
)()( =
• •
∂∂
∂∂
∂∂= p
p
u
u
y
y
ET )(),( 2
22
teu
ypu
∂∂Φ−= η (4.5)
Desde η >0 entonces )(tE•
≤ 0 , 0>∀t . De aquí se concluye que de la teoría de
estabilidad de Lyapunov la función del error esta decrementando a medida que el tiempo esta creciendo. En otras palabras por usar los parámetros de sintonía del algoritmo, el controlador neuronal simple es capaz de producir entradas de control adaptable convenientes tal que la salida del sistema pueda alcanzar la salida deseada asintoticamente. También de esta función se puede ver que de aquí se toma parte de esta para poder tener la función candidata de Lyapunov. Las reglas de adaptación para el sistema, vienen dadas por un algoritmo de sintonización para el controlador neuronal simple como se describe a continuación:
( ) ( ) ( )( ) ( )( )
∂∂Φη=
•
tu
tysigntp,tute)t(p (4.6)
Donde η es la rata de aprendizaje, esta determina la velocidad de convergencia de la señal y a un valor muy alto de η , ocurrirá un sobre impulso en la respuesta del sistema.
[ ]T,b,ap θ≡ , es el vector de parámetros y ( )( )
∂∂
tu
tysign , es el signo de ( )
( )
∂∂
tuty .
( ) ( )( )tp,tuΦ , es definida como p
u
∂∂
;
Así con la ecuación representativa de u(t), se procede a obtener la función
( ) ( )( )tp,tuΦ y derivando u con respecto a cada parámetro se obtiene

66
( ) ( )( )tptu ,Φ ( )( ) ( ) ( ) ( ) ( ) T
a
tu
a
tuab
a
tu
a
tutea
a
u
p
u
+
−−
+
−−=∂∂≡ 11
21
,1121
, θ (4.7)
Las propiedades de convergencia del sistema en lazo cerrado son explicadas por el siguiente teorema
Una prueba teórica del teorema es propuesta por Chen (2001). Para aplicar lo anterior SNC algoritmo de aprendizaje de parámetros, se debe calcular el ( )kz en cada instante
iterativo. Según la definición de ( )kz vista anteriormente, el cálculo es basado en las
evaluaciones de la función de sensibilidad ( ) ( )( )kpku ,Φ y el gradiente de la salida del
proceso con respecto a la entrada de control ( ) ( )kuky ∂∂ / . La evaluación de la función de sensibilidad es simple, mientras que la determinación de la derivada parcial depende de las características del proceso en el punto de operación para ser controladas (Chen et al., 1999). Para eludir la dificultad de estimar con exactitud el valor del gradiente, Chen (2001) ha sugerido sustituir ( )kz con ( ) ( )( ) ( )( ) ( ) ( )( )kpkukukysignkz ,/ Φ∂∂= en la
implementación practica del CNS. La sustitución de ( ) ( )kuky ∂∂ / por su valor en signo (dirección de respuesta del sistema) conduce a un simple algoritmo de aprendizaje para el control directo de adaptación ya que utiliza la dirección de respuesta del sistema en lugar de su valor. Ahora el esquema de un controlador neuronal simple construido en SIMULINK de MATLAB para una planta variante es
TEOREMA (CHEN 2001): asumiendo que ( )kz es limitado. Con 0<η <2; entonces
cuando los parámetros de aprendizaje del algoritmo son aplicados, el vector de parámetros del controlador p converge su optimo local p* asintóticamente, donde
( ) dupNL =*,0 (entrada de control deseada) y ( ) 0* =pe [29].

67
Figura 4.14 Simulación del CNS
Donde para una señal de entrada onda cuadrada con periodo de 10 segundos se tiene como respuesta lo siguiente.
Figura 4.15 Respuesta del CNS
Para un caso MIMO, en el bucle i, la SNC-i se utiliza para producir la salida del controlador a través de la siguiente función no lineal
( ) ( )[ ][ ]{ }( )[ ][ ]iii
iiiii teb
tebatu
θθ
−−+−−−=
exp1
exp1~ (4.8)
Para generar entradas de control adecuadas, el siguiente algoritmo de ajuste de parámetros (en forma continua) para CNS es el siguiente:
( ) nizz
zetp
iTi
iiii ,..,2,1,1
=+
= η& (4.9)

68
Donde
( ) ( )( ) ( )iiiii puuysignkz ,~~/ Φ∂∂= (4.10)
Luego
( ) iiii pupu /~,~ ∂≡Φ ( )( )T
i
i
i
iii
i
i
i
iiii
i
i
a
u
a
uba
a
u
a
utea
a
u
+
−−
+
−−=
~1
~1
21
,~
1~
121
,~
θ (4.11)
Otra alternativa para realizar este objetivo de control puede lograrse también con la implementación de un PID neuronal tal como lo explica la siguiente sección. 4.2 Controlador PID neuronal El PID neuronal es un nuevo tipo de controlador con red neuronal multicapa en la que las neuronas tienen acción proporcional, integral o derivativa y el controlador está optimizado para sistemas no lineales y con grandes constantes de tiempo de retardo por el acondicionamiento del algoritmo Backpropagation. Es decir, el PID neuronal combina el algoritmo convencional del PID con el poder del aprendizaje de las redes neuronales [30]. Este controlador consiste de una neurona proporcional una integral y una derivativa en la capa oculta. Las cuales se definen de la siguiente manera:
Figura 4.16 Forma de la neurona
Neurona proporcional Si una neurona proporcional es la j-esima neurona en la red y esta tiene n-1 entradas, para un tiempo k, la entrada de una neurona es:
( ) ( )∑−
==
1
1
*n
iiijj kxwku (4.12)

69
Donde ( )kxi son las salidas de n-1 neuronas de entrada y ijw son los pesos.
La función entrada-salida de una neurona proporcional es:
( ) ( )kukx ji = (4.13)
Neurona integral Si una neurona integral es la j-esima neurona en una red. La entrada de una neurona integral es la misma que la de una neurona proporcional. La función de entrada-salida de una neurona integral es:
( ) ( ) ( ) ( ) ( )kukxkxdttutx jjj
t
jj ++=→= ∫ 10
(4.14)
Donde ( )kx j es la salida de la neurona.
Neurona derivativa Si una neurona derivativa es la j-esima neurona en una red. La entrada de una neurona derivativa es la misma que la de una neurona proporcional. La función de entrada-salida de una neurona derivativa es:
( ) ( ) ( ) ( ) ( )1−−=→= kukukxdt
tdutx jjj
jj (4.15)
Donde ( )tx j es la salida de la neurona.
Ahora el esquema del controlador y la planta para el caso SISO es el siguiente

70
Figura 4.17 Controlador y la planta para el caso SISO
La función error a reducir es
( ) ( ) ( )[ ] ( )kekykrkE 22
21
21 =−= (4.16)
Donde ( )ky es la salida del sistema y ( )kr es la entrada del sistema. Después de k pasos de entrenamiento, los pesos de la capa oculta a la capa de salida son:
( ) ( ) ( )( ) ( ) ( ) ( )kqkkwkw
kEkwkw ii
iii '1 2
222
22 δηη +=∂∂−=+ (4.17)
( ) ( ) ( ) ( )( ) ( )
−−−−−=
211
sgn'kuku
kykykekδ (4.18)
Después de k pasos de entrenamiento los pesos de la capa de entrada a la capa oculta son:
( ) ( ) ( )( ) ( ) ( ) ( )krkkwkw
kEkwkw jiij
iijij δηη 1
111
21 1 +=∂∂−=+ (4.19)
( ) ( ) ( ) ( )( ) ( )
−−−−=
11
sgn' 2
kxkx
kqkqwkk
ii
iiii δδ (4.20)
La simulación para el caso SISO con un tiempo de retardo de 10 segundos es la siguiente:

71
Figura 4.18 Simulación del PID neuronal
Con respuesta
Figura 4.19 Respuesta del PID neuronal
Para este algoritmo se utilizo momento y una rata de aprendizaje de 0.1 para los pesos de aprendizaje de la capa de entrada a la capa oculta y 0.0115 para el peso de la neurona proporcional, 0.00575 para la neurona integral y 0.01 para la neurona derivativa.

72
CAPÍTULO 5 5. Caso de aplicación del controlador neuronal simple sobre un proceso MIMO en
una torre de destilación La torre de destilación es un sistema multivariable con fuerte interacción. Esta columna de destilación separa una mezcla de metanol-agua en dos productos relativamente puros. El esfuerzo de control es mantener las dos concentraciones, la del tope (xd) y la del fondo de la torre (xb) en el valor deseado.
Figura 5.1 Representación simplificada de la torre de destilación
Donde cada variable de entrada tiene una relación con cada variable de salida de la forma
(5.1) Donde Kp es la ganancia del proceso, pτ la constante de tiempo del proceso y θ el
tiempo de retardo del proceso. Tales funciones de trasferencia son:
++
++= −−
−−
14.14
4.19
19.10
6.6121
9.18
17.16
8.12
)( 37
3
S
e
S
eS
e
S
e
sG SS
SS
(5.2)

73
Como se puede observar el sistema es matricial y de orden 2*2. También, las funciones de transferencia son de primer orden y poseen tiempo muerto. Además, los parámetros de cada una de las plantas son constantes. Como no está disponible un modelo analítico para el proceso, solo se tienen las ganancias en estado estable del proceso como información a priori, las cuales se representan como Kij
=
4.196.6
9.188.12K (5.3)
Calculando la matriz de ganancias relativas, la cual es de vital importancia para saber cual es el mejor emparejamiento de las variables controladas y las variables manipuladas y conocer que tipo de lazos interactúan en el sistema. Esta matriz es posible calcularla a través de la ganancia K del sistema y como se había mencionado anteriormente, la matriz de ganancias relativas se calcula por medio de la siguiente expresión TKxK )( 1−=λ , donde x corresponde a un producto punto a punto. Luego:
−−
=−
1036.01529.0
0534.01570.0)( 1 TK (5.4)
−−
=
−−
== −
01.201.1
01.101.2
1036.01529.0
0534.01570.0
4.196.6
9.188.12)( 1 xKxK Tλ (5.5)
Esta matriz muestra que existe una interacción de lazo fuerte y que el mejor emparejamiento de las variables controladas y las variables manipuladas es: y1 controlada por u1 y y2 controlada por u2. 5.1 Concepto de desacople (Dij) El Objetivo principal de los desacopladores es eliminar o reducir las interacciones de cada variable de entrada con las variables de salida distintas de la que controla con el fin de permitir trabajar al sistema como varios sistemas SISO y de esta manera simplificar el sistema y volverlo un poco menos complejo. La siguiente grafica podrá explicar mejor dicho concepto:
Figura 5.2 Desacople entrada salida

74
La figura 5.2 da a entender que no existe ninguna relación entre la salida y2 y la entrada m’1, y la salida y1 y la entrada m’2; es decir, se desacoplaron las entradas y las salidas de tal manera que la entrada i solo pueda controlar la salida i Existen varias clases de desacoples, el desacople parcial y el total 5.1.1 Desacople lineal parcial (Dij) El Objetivo es Eliminar o reducir la interacción mediante el desacople de la salida más importante del resto de las entradas, tal como se muestra en el siguiente esquema.
Figura 5.3 Desacople lineal parcial
• La sintonización del lazo de control de la variable importante es independiente de las otras funciones de transferencia del sistema. (Son perturbaciones). • La sintonización de los otros lazos de control dependerá del resto de las funciones de transferencia del sistema ajenas al lazo principal. • El desacople es mucho menos sensible a los errores en el modelo por lo que está más extendido.
5.1.2 Desacople lineal total (Dij) El objetivo es eliminar o reducir la interacción de lazos sobre otro totalmente, como se muestra en la siguiente figura.

75
Figura 5.4 Desacople lineal total
Es importante destacar que si se multiplica la matriz de las funciones de transferencias por la matriz de desacople resulta:
(5.6)
• Las funciones de transferencia de las ganancias relativas pueden aproximarse sin problema a su ganancia relativa estática. • Los errores en el modelado pueden afectar gravemente a la estabilidad y comportamiento del sistema. Por ello no se aconseja la utilización de desacopladores cuando se tienen ganancia relativa elevada. De esto se puede concluir que por medio de los desacopladores estáticos, haciendo uso de un desacople total, el sistema multivariable se vuelve un sistema diagonal, es decir todas las componentes de la matriz de ganancias son cero excepto su diagonal, lo cual simplifica de gran manera el sistema y efectivamente puede verse como un conjunto de sistemas SISO. Para este caso se hace uso de un desacople total de los lazos como ya se explicó. Se debe calcular los desacopladores de la siguiente forma:
ii
ij
ii
ij
Sij K
K
sG
sGD −=−=
→ )(
)(lim
0 (5.7)

76
Para el proceso estudiado las ganancias de los desacopladores son D21 = -0.34 y D12 = -
1.48. Además, el signo de la derivada )(
)(
tu
ty
i
i
∂∂
puede ser calculado fácilmente
conociendo el signo de Kii. Para este caso, se tiene que:
12
21
1
12211 ==
∂∂==
∂∂
Ku
ysignyK
u
ysign (5.8)
5. 2 Simulaciones del proceso para un sistema con parámetros fijos El sistema a implementar en Simulink es de la forma:
Figura 5.5 Esquema del sistema en lazo cerrado
En donde SNC1 Y SNC2 corresponden a los dos controladores neuronales simples. Como se dijo anteriormente, estos controladores son de la forma:
2,1,))((exp(1
))))((exp(1()( =
−−+−−−= i
teb
tebatu
iii
iiiii
θθ
Aquí, los parámetros ai, bi, θi, de las dos neuronas es posible ajustarlos mediante la siguiente regla de adaptación:
2,12*2,)(
)())(),(()()( =
∂∂= idematricialsistemaunpara
tu
tysigntptutetp
i
iiiiii φη
Aquí se sigue cumpliendo que:

77
T
i
i
i
i
iii
i
i
i
iiii
i
i
i
ii a
u
a
uba
a
u
a
utea
a
u
tp
tutptu
+
−−
+
−−=
∂∂= 11
2
1,11))((
2
1,
)(
)())(),(( θφ
De igual forma i = 1, 2. El diagrama en Simulink queda de la siguiente forma: Planta con parámetros fijos:
Figura 5.6 Planta con parámetros fijos
Figura 5.7 Simulación del sistema en lazo cerrado con la planta de parámetros fijos
Con una respuesta

78
Figura 5.8 Respuesta del sistema de la figura 5.7
En esta simulación, es posible observar como la salida para el lazo realimentado 1 responde ante un cambio en el escalón en un tiempo de 400s y después se estabiliza hasta alcanzar los 800s, tiempo en el cual se realiza el cambio en el escalón para la salida y2 que corresponde al lazo 2. Para un cambio en el escalón en un tiempo igual a 400seg en primer lazo se tiene el siguiente resultado:
Figura 5.9 Salida y1 Vs. Tiempo (seg.)
A continuación, se muestra la señal de salida y2

79
Figura 5.10 Salida y2 Vs. Tiempo (seg.)
De las últimas dos gráficas es posible observar como actúan los desacopladores en el sistema, dado que para un cambio en el SET-POINT del lazo 1 la salida y2 del proceso se mantiene en cero, mientras que la salida y1 que corresponde al lazo realimentado 1 persigue al escalón hasta estabilizarse. Todo esto ocurre en un tiempo de 0s a 400s. También, se observa que para un cambio en el SET-POINT en un tiempo de 800s en la entrada que corresponde al lazo 2, la señal y2 del sistema responde al escalón, mientras que la y1 no es afectada por dicho cambio. Por lo tanto, se concluye que el sistema está correctamente desacoplado. Además, se puede decir que los dos controladores neuronales funcionan de manera correcta, debido a que las dos salidas controladas presentan pocos sobreimpulsos y se estabilizan en un tiempo muy corto. Ahora, se registrarán los resultados obtenidos para los parámetros de cada neurona, sus respectivos errores y esfuerzos de control. Para el controlador SNC1, se tiene:
Figura 5.11 a1 Vs. Tiempo (seg.) Figura 5.12 b1 Vs. Tiempo (seg.)
Figura 5.13 Θ1 Vs. Tiempo (seg.) Figura 5.14 Error1 Vs. Tiempo (seg.)

80
Figura 5.15 Esfuerzo de control U1 Vs. Tiempo (seg.)
Para el controlador CNS2:
Figura 5.16 a2 Vs. Tiempo(seg.) Figura 5.17 b2 Vs. Tiempo (seg.)
Figura 5.18 Θ2 Vs. Tiempo (seg.) Figura 5.19 Error2 Vs. Tiempo (seg.)
Figura 5.20 Esfuerzo de control U2 Vs. Tiempo (seg.)

81
De estas últimas simulaciones es posible concluir que los parámetros del modelo convergen a un valor especifico, Además, los errores son demasiado pequeños y los esfuerzos de control se pueden implementados fácilmente. De todo lo anterior se debe a que se garantiza estabilidad por Lyapunov. Ahora se comparará la respuesta obtenida con los CNS con un controlador PI secuencial para el mismo proceso. El diagrama en Simulink para el controlador PI secuencial es de la siguiente forma:
Figura 5.21 Esquema del controlador PI secuencial
Los resultados obtenidos son:
Figura 5.22 Salida y1 Vs. Tiempo (seg.) Figura 5.23 Salida y2 Vs. Tiempo (seg.) En estas dos últimas graficas se comparan las respuestas del sistema con el controlador neuronal (Línea color rojo) y controlador PI secuencial (Línea azul) donde es posible observar que ambos controladores son muy buenos. Aunque, la única diferencia que hay entre los dos es que el controlador PI presenta menos sobreimpulsos que el neuronal. 5. 3 Simulaciones del proceso para un sistema con parámetros variante A continuación, se registran los resultados obtenidos cuando se trabaja con una planta variante. El sistema en Simlink es similar al que se obtiene cuando se trabaja con una

82
planta con parámetros fijos. Lo único que cambia es que se debe calcular desacopladotes para cada momento en que cambian las ganancias K de la planta. La planta es la siguiente:
Figura 5.24 Planta variante
En donde, cada una de las dinámicas de la planta se comporta de la siguiente forma:
Figura 5.25 Función de transferencia G11
Figura 5.26 Función de transferencia G12

83
Figura 5.27 Función de transferencia G21
Figura 5.28 Función de transferencia G22
El sistema en Simulink es el siguiente:
Figura 5.29 Simulación del sistema en lazo cerrado con la planta de parámetros
variantes

84
En la figura 5.29 es posible observar la presencia de dos desacopladores más, esto se debe a que la planta presenta cuatro dinámicas que cambian conforme transcurre el tiempo. Los desacopladores son calculados así: Para un tiempo de 0 a 10seg la planta tiene las siguientes ganancias:
=
1.15.0
21K
La matriz de ganancias relativas es:
−−
=
−−
== −
1110
1011
1020
511
1.15.0
21)( 1 xKKx Tλ
Si el tiempo va desde 10seg en adelante la planta tiene las siguientes ganancias:
=
2.17.0
1.25.1K
La matriz de ganancias relativas es:
−−
=
−−
== −
45.545.14
45.445.5
1020
511
2.17.0
1.25.1)( 1 xKKx Tλ
De este resultado es posible decir que la mejor estrategia de control es la de controlar la variable y1 con la entrada U1 y la salida y2 con la entrada U2. Los desacopladores para este sistema se calculan de igual forma como si se estuviera trabajando con una planta con parámetros fijos. Entre 0 a 10seg. Se tiene: D21 = -0.04545 D12 = -2 De 10seg. en adelante D21 = -0.5833 D12 = -1.4 Los resultados obtenidos son:

85
Figura 5.30 Salida y1 Vs. Tiempo (seg.)
Figura 5.31 Salida y2 Vs. Tiempo (seg.)
Como se puede observar en estas dos simulaciones las salidas y1 y y2 tienden a estabilizarse a medida que transcurre el tiempo. Además, la entrada u1 no afecta la salida y2 y viceversa. De aquí se puede concluir que los desacopladores calculados funcionan correctamente. Por otra parte, es importante decir que en todas las simulaciones fue necesario incluir ruido en la señal de entrada, debido a que este tipo de señal obliga a la neurona a funcionar correctamente. Al trabajar con una planta variante regulada con controladores CNS, es posible decir que todo este sistema puede ser utilizado para obligar a la planta a que siga un modelo de referencia. Esto se ve a continuación.

86
Figura 5.32 Salida y1 Vs. Tiempo (seg.) Figura 5.33 Salida y2 Vs. Tiempo (seg.) El éxito de obtener buenos resultados depende en gran parte de las condiciones iniciales con las que empiece el sistema a operar.

87
6. Conclusiones
• La teoría de Redes Neuronales Artificiales presenta grandes ventajas con respecto a otros modelos típicos de solución de problemas de Ingeniería, una de ellas es su inspiración en modelos biológicos del funcionamiento del cerebro, lo que facilita su estudio debido a las analogías que pueden introducirse para su análisis.
• La relevancia del uso de las redes neuronales en control se debe principalmente
a que casi todos los procesos industriales son no lineales, pero son pocos los diseños de control para sistemas no lineales que son usados en la práctica.
• Las redes neuronales son una teoría que junto a otras técnicas de inteligencia
artificial ha generado soluciones muy confiables a problemas de Ingeniería, los cuales a pesar de poder ser solucionados por métodos tradicionales, encuentran en las redes neuronales una alternativa que es fácil de implementar y altamente segura por su robustez.
• Las redes neuronales son una teoría y como tal presentan aún algunas
limitaciones, pero su facilidad de implementación y la calidad en la información que entregan como respuesta, son la motivación suficiente para que su estudio y desarrollo en la ingeniería de control continúe.
• En las simulaciones realizadas fue posible validar la convergencia de los
parámetros y la estabilidad del sistema, la cual es garantizada por Lyapunov.
• Al comparar las respuestas obtenidas con los controladores neuronales con un controlador PI convencional se pudo verificar que ambos son altamente eficientes. Sin embargo, los controladores neuronales simples (SNC) pueden ser utilizados para plantas cambiantes en el tiempo, en donde es posible obtener un muy buen seguimiento de la señal de salida con la señal de entrada.
• De todas las simulaciones es posible concluir que el éxito de obtener buenos
resultados depende en gran parte de las condiciones iniciales con las que empiece el sistema a operar.

88
7. Referencias Bibliográficas
[1] Villanueva, Maria del Rosario (2002) las redes neuronales artificiales y su importancia como herramienta en la toma de decisiones [en línea]. Disponible desde: hppt:// sisbib.unmsm.edu.pe/bibVirtual/Tesis/Basic/Villanueva_EM/Contenido.htm [accesado el 17 de enero del 2009] [2] Ibíd. Disponible en Internet: sisbib.unmsm.edu.pe/bibVirtual/Tesis/Basic/Villanueva_EM/Contenido.htm [3] Ibíd. Disponible en Internet: sisbib.unmsm.edu.pe/bibVirtual/Tesis/Basic/Villanueva_EM/Contenido.htm [4] Tanco, Fernando (s.f) Introducción a las redes neuronales artificiales [en línea]. Disponible desde: http:// www.secyt.frba.utn.edu.ar/gia/RNA.pdf [accesado el 4 de enero de 2009] [5] Ibíd. Disponible en Internet: sisbib.unmsm.edu.pe/bibVirtual/Tesis/Basic/Villanueva_EM/Contenido.htm [6] (s.n) “Introducción a las redes neuronales aplicadas”. [en línea]. Disponible desde: http:// halweb.uc3m.es/esp/Personal/personas/jmmarin/esp/DM/tema3dm.pdf [accesado el 8 de enero de 2009] [7] Ibíd. Disponible en Internet: halweb.uc3m.es/esp/Personal/personas/jmmarin/esp/DM/tema3dm.pdf [8] Ibíd. Disponible en Internet: halweb.uc3m.es/esp/Personal/personas/jmmarin/esp/DM/tema3dm.pdf [9] Peguero, Juan Carlos (2003) control de una planta de tratamiento de aguas residuales mediante redes neuronales [en línea]. Disponible desde: http:// dialnet.unirioja.es/servlet/oaites?codigo=248 [accesado el 13 de enero del 2009] [10] Tanco, Fernando (s.f) Op. Disponible desde: http:// www.secyt.frba.utn.edu.ar/gia/RNA.pdf [11] Ibíd. Disponible en Internet: www.secyt.frba.utn.edu.ar/gia/RNA.pdf [12] HILERA José R., MARTÍNEZ Víctor J. “Redes Neuronales Artificiales. Fundamentos, modelos y aplicaciones “. Ra-ma Editorial. Madrid, 1995

89
[13] Chicaiza, Janneth A. y Quezadaz, Willy D. (2007) "Algoritmo backpropagation". Escuela de ciencias de la computacion, Loja, Ecuador. [14] (s.n) (s.f) “Control Moderno” [en línea]. Disponible desde: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [accesado el 22 de enero de 2009] [15] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [16] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [17] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [18] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [19] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [20] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [21] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [22] Ibíd. Disponible en Internet: http:// proton.ucting.udg.mx/materias/moderno/u56.htm [23] Arancibia, Jose G. "Diseño e implementación de un sistema de control avanzado para procesos complejos". Universidad catolica del norte. Antofagasta. Chile [24] (s.n) (2002)” Control de sistemas multivariables” [en línea] Disponible desde: http://www.elai.upm.es/spain/Asignaturas/ControlProcesos/archivos/Transparencias/Tema4.pdf [accesado el 26 de enero del 2009] [25] Ibíd. Disponible en Internet: http://www.elai.upm.es/spain/Asignaturas/ControlProcesos/archivos/Transparencias/Tema4.pdf [26] Ibíd. Disponible en Internet: http://www.elai.upm.es/spain/Asignaturas/ControlProcesos/archivos/Transparencias/Tema4.pdf

90
[27] Ibíd. Disponible en Internet: http://www.elai.upm.es/spain/Asignaturas/ControlProcesos/archivos/Transparencias/Tema4.pdf [28] Ibíd. Disponible en Internet: http://www.elai.upm.es/spain/Asignaturas/ControlProcesos/archivos/Transparencias/Tema4.pdf [29] Chen, Chyi-Tsong y Hwang, Chyi (2006). “Direct adaptive process control based on
using a single neuron controller: survey and some new results”. Journal of the Chinese
Institute of Engineers, Vol. 29, No. 2, pp. 289-299.
[30] Shu, Huailin y Guo, Xiucai (1997). "decoupling control of multivariable time-
varying systems based on pid neural network". Department of electrical automation
engineering of China.
[31] Chen, Chyi-Tsong y Yen, Jia-Hwang (1998). "Multivariable Process Control Using
Decentralized Single Neural Controllers". Journal of Chemical Engineering of Japan,
Vol 31, No. 1,pp. 14-20.