Teoria Taller
8
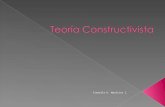
hacerBarra y Bola: Modelado de Sistemas Comandos de MATLAB clave utilizados en este tutorial son: tf, ss Una bola se coloca en un haz, ver fgura de abajo, donde se le permite rodar con 1 grado de libertad a lo largo de la longitud de la viga. Un brazo de palanca está unido a la viga en un extremo y un engranaje de ser vo en el otro. Como el engranaje servo gira en un ángulo, la palanca cambia el ángulo de la viga por . Cuando el ángulo se cambia de la posición horizontal, la gravedad hace ue la bola ruede a lo largo de la viga. Un controlador se ha dise!ado para este sistema de modo ue la posición de la pelota puede ser manipulada. "os parámetros del sistema #ara este problema , vamos a suponer ue la bola rueda sin deslizamiento y la $ricción entre la viga y la bola es despreciable. "as constantes y variables para este ejemplo se defnen como sigue% (m) mass of the ball 0.11 kg (R) radius of the ball 0.015 m (d) lever arm offset 0.03 m (g) gravitational acceleration 9.8 m/s! (") length of the beam 1.0 m (#) ball$s moment of inertia 9.99e%& kg.m!
-
Upload
johnk-skandon-pnd -
Category
Documents
-
view
213 -
download
0
description
teoria de control
Transcript of Teoria Taller
hacerBarra y Bola: Modelado de Sistemas Comandos de MATLAB clave utilizados en este tutorial son: tf, ssUna bola se coloca en un haz, ver figura de abajo, donde se le permite rodar con 1 grado de libertad a lo largo de la longitud de la viga. Un brazo de palanca est unido a la viga en un extremo y un engranaje de servo en el otro. Como el engranaje servo gira en un ngulo, la palanca cambia el ngulo de la viga por. Cuando el ngulo se cambia de la posicin horizontal, la gravedad hace que la bola ruede a lo largo de la viga. Un controlador se ha diseado para este sistema de modo que la posicin de la pelota puede ser manipulada.
Los parmetros del sistema Para este problema, vamos a suponer que la bola rueda sin deslizamiento y la friccin entre la viga y la bola es despreciable. Las constantes y variables para este ejemplo se definen como sigue:(m) mass of the ball 0.11 kg(R) radius of the ball 0.015 m(d) lever arm offset 0.03 m(g) gravitational acceleration 9.8 m/s^2(L) length of the beam 1.0 m(J) ball's moment of inertia 9.99e-6 kg.m^2(r) ball position coordinate(alpha) beam angle coordinate(theta) servo gear angleCriterios de diseo Tiempo de estabilizacin