Sólido rígido - Dinámica de Rotación.ppt
50
Dinámica del Cuerpo Rígido Momento de inercia Momento de inercia de una partícula eje r m El momento de inercia se define como el “segundo momento” de la masa m en torno a un eje. 2 r m I r es la distancia perpendicular al eje medida desde la masa m.
-
Upload
alvaroballivian -
Category
Documents
-
view
236 -
download
11
Transcript of Sólido rígido - Dinámica de Rotación.ppt

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una partícula
eje
r
m
El momento de inercia se define como el “segundo momento” de la masa m en torno a un eje.
2r mI
r es la distancia perpendicular al eje medida desde la masa m.

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un sistema de partículas
eje
r1
m1
m3
m2
r3
r2
233
222
211 r mr mr mI
n
1i
2ii r mI

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un cuerpo rígido
r
dm
z
m
2 dm r I
El momento de inercia es una forma de medir la resistencia opuesta por un cuerpo a la aceleración angular.

Dinámica del Cuerpo Rígido
Momento de inerciaTeorema de Steiner
y’
rdm
r’x’
z’z
d x’
y’A G
Se conoce IG con respecto a z’. Se calculará I con respecto a un eje paralelo z situado a una distancia d. dm y'x'ddm r I
m
2
m
2 2
m
2
mm
22 dm ddm x' 2ddm y'x' I 222 y'x'r'
0dm xdm x' mm
entonces: 2G mdII

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una varilla
Varilla de masa M y longitud L. Se calculará el Mto. de Inercia con respecto a un eje perpendicular a la varilla que pasa por su centro de masa.
La masa dm del elemento de longitud de la varilla comprendido entre x y x+dx es:
El momento de inercia de la varilla es:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una varilla
Aplicando el teorema de Steiner, podemos calcular el momento de inercia de la varilla respecto de un eje perpendicular a la misma que pasa por uno de sus extremos.

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un disco

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un disco
Tomamos un elemento de masa dm que dista una distancia x del eje de rotación. El elemento es un anillo de radio x y de anchura dx. Si recortamos el anillo y lo extendemos, se convierte en un rectángulo de longitud 2πx y anchura dx, cuya masa es:
El momento de inercia será:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un cilindro
Vamos a calcular el momento de inercia de un cilindro de masa M, radio R y longitud L respecto de su eje.
Tomamos un elemento de masa dm que dista x del eje de rotación. El elemento es una capa cilíndrica cuyo radio interior es x, exterior x+dx, y de longitud L, tal como se muestra en la figura. La masa dm que contiene esta capa es:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un cilindro
El momento de inercia será:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una placa rectangular
Vamos a calcular el momento de inercia de una placa rectangular delgada de masa M de lados a y b respecto del eje que pasa por la placa.Tomamos un elemento de masa dm que dista x del eje de rotación. El elemento es un rectángulo de longitud a de anchura dx. La masa de este rectángulo será:
El momento de inercia será:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un disco
Vamos a calcular el momento de inercia de un disco de masa M y radio R, respecto de uno de sus diámetros.Tomamos un elemento de masa que dista x del eje de rotación. El elemento es un rectángulo de longitud 2y de anchura dx. La masa de este rectángulo será:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un disco
El momento de inercia del disco es:
haciendo el cambio de variablex=R · cosθy=R · senθllegamos a la integral:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una esfera
Vamos a calcular el momento de inercia de una esfera de masa M y radio R respecto de uno de sus diámetros.
Dividimos la esfera en discos de radio x y de espesor dz.

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una esfera
El momento de inercia de cada uno de los discos elementales es:
La masa de cada uno de los discos es:
El momento de inercia de la esfera, es la suma de los momentos de inercia de todos los discos elementales.

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de una esfera
Para resolver la integral tenemos que relacionar la variable x con la z. Como vemos en la figura x2+z2=R2

Dinámica del Cuerpo RígidoMomento de inerciaMomento de inercia de un cilindro
Vamos a calcular el momento de inercia de un cilindro de masa M, radio R y longitud L, respecto de un eje perpendicular a su generatriz y que pasa por su centro.
Dividimos el cilindro en discos de radio R y espesor dx. El momento de inercia de cada uno de los discos respecto de uno de sus diámetros es:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un cilindro
Aplicando el teorema de Steiner, calculamos el momento de inercia de este disco, respecto de un eje paralelo situado a una distancia x.
El momento de inercia del cilindro será:

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un paralelepípedo
Vamos a calcular el momento de inercia de un paralepípedo de masa M y de lados a, b y c respecto de un eje perpendicular a una de sus caras.
Dividimos el paralepípedo en placas rectangulares de lados a y b y de espesor dx.

Dinámica del Cuerpo Rígido
Momento de inerciaMomento de inercia de un paralelepípedo
El momento de inercia de cada una de las placas respecto de su eje de simetría es:
Aplicando el teorema de Steiner, el momento de inercia de esta placa respecto de un eje paralelo situado a una distancia x será:
El momento de inercia del sólido en forma de paralepípedo será:

Dinámica del Cuerpo RígidoRadio de Giro (k)
z
k
M
M
Es la distancia desde el eje hasta un punto donde se concentra la masa M, para obtener el mismo momento de inercia sin cambiar sus propiedades.
2k MI
MI
k

Momento angular de una partícula
Se define el momento angular de una partícula como el producto vectorial del vector posición r por el vector momento lineal (mv).
Dinámica del Cuerpo Rígido
prvrL
m

Las partículas de un sólido rígido en rotación alrededor de un eje fijo describen circunferencias centradas en el eje de rotación con una velocidad que es proporcional al radio de la circunferencia que describen vi=ω ·ri
En la figura, se muestra el vector momento angular Li de una partícula de masa mi cuya posición está dada por el vector ri y que describe una circunferencia de radio Ri con velocidad vi.
El módulo del vector momento angular vale:
Li=ri mi vi
Dinámica del Cuerpo Rígido
Momento angular de un sólido rígido

Momento angular de un sólido rígidoSu proyección sobre el eje de rotación Z es
Dinámica del Cuerpo Rígido
iiiiiiiiiz senθrvm)θcos(90rvmL
donde: ii ωRv iii Rsenθr
luego: ωRmL 2iiiz
El momento angular de todas las partículas del sólido es: iLL
La proyección Lz del vector momento angular a lo largo del eje de rotación será: ω RmLL 2
iiizz

Momento angular de un sólido rígido
Dinámica del Cuerpo Rígido
donde: inercia) de (momento I Rm 2ii En general, el vector momento angular L no tiene la dirección del eje de rotación, es decir, el vector momento angular no coincide con su proyección Lz a lo
largo del eje de rotación. Cuando coinciden se dice que el eje de rotación es un eje principal de inercia. Para estos ejes existe una relación sencilla entre el momento angular y la velocidad angular, dos vectores que tienen la misma dirección, la del eje de rotación.
IL

Momento o Torque de una Fuerza
Dinámica del Cuerpo Rígido
El momento o torque de una fuerza se define como el efecto de giro que produce ésta sobre un cuerpo alrededor de un punto, y es igual al producto vectorial del vector posición r de la fuerza por el vector fuerza F.
FrMO
d F sen r FMO
d = brazo de palanca ┴F d

Ecuación del Movimiento de Rotación
Dinámica del Cuerpo Rígido
De la segunda ley de Newton:
aF
m arFr
m
dt
d m
dtd
m mv
rv
rarM
pero: vrv
r
dtd
dtd
prvrvrM
dtd
m dtd
dtd
m
luego:

Ecuación del Movimiento de Rotación
Dinámica del Cuerpo Rígido
dtdL
M
dt Id
dtd
LM
IM
Si el momento de inercia I es constante, como ocurre en los cuerpos rígidos, entonces:
dtd
I
M
Ecuación del Movimiento de Rotación de un cuerpo rígido.

Ecuaciones del Movimiento: traslación
Dinámica del Cuerpo Rígido
G
F1
F2
F3
F4
W
M1
M2
G
maG
=
Traslación rectilínea

Ecuaciones de Movimiento: traslación
Dinámica del Cuerpo Rígido
Traslación rectilíneaCuando un cuerpo experimenta una traslación rectilínea, todas sus partículas viajan con trayectorias rectilíneas paralelas.
0 M
)(a m F
)(a m F
G
yGy
xGx
Los diagramas de cuerpo libre y cinético se muestran en la figura anterior. Las ecuaciones de movimiento correspondientes serán:
Si la sumatoria de momentos se calcula en torno a un punto distinto al centro de gravedad, entonces se debe considerar el momento de maG.

Ecuaciones de Movimiento: traslación
Dinámica del Cuerpo Rígido
Traslación curvilínea
G
t
n
m(aG)t
m(aG)n
G
F1
F2
F3
F4
W
M1
M2
t
n
=

Ecuaciones de Movimiento: traslación
Dinámica del Cuerpo Rígido
Traslación curvilíneaCuando un cuerpo experimenta una traslación curvilínea, todas sus partículas recorren trayectorias curvas paralelas.
0 M
)(a m F
)(a m F
G
tGt
nGn
Conviene utilizar un sistema de coordenadas inerciales cuyo origen coincida con el centro de masa del cuerpo, y que los ejes se orienten en las direcciones normal y tangencial de la trayectoria. La ecuaciones escalares del movimiento serán:
Si la sumatoria de momentos se calcula en torno a un punto distinto al centro de gravedad, entonces se debe considerar el momento de ambas componentes m(aG)t y m(aG)n.

Ecuaciones de Movimiento: rotación en torno de un eje fijo
Dinámica del Cuerpo Rígido
G
O
F2
F1
FO
F4
F3
W
M1
M2 G
O
r G
IGα
m(aG)n
m(aG)t
=
El cuerpo rígido (placa) está limitado a girar en torno a un eje perpendicular a la diapositiva que pasa por el punto O.

Dinámica del Cuerpo RígidoEcuaciones de Movimiento: rotación en torno de un eje fijoDebido a que el centro de masa del cuerpo, G, recorre una trayectoria circular, su aceleración está representada por sus componentes tangencial y normal.
La figura anterior muestra los diagramas de cuerpo libre y cinético del cuerpo. El peso del cuerpo W y la reacción del eje FO se incluyen en el diagrama de cuerpo libre debido a que son fuerzas externas que actúan sobre el cuerpo.
α I M
r α m )(a m F
r ω m )(a m F
GG
GtGt
G2
nGn
Las ecuaciones escalares de movimiento que corresponden al cuerpo serán:

Dinámica del Cuerpo RígidoEcuaciones de Movimiento: rotación en torno de un eje fijoEn muchos problemas resulta conveniente encontrar la sumatoria de momentos en torno del eje que pasa por O, con el objeto de eliminar la fuerza desconocida FO. En este caso:
α I αmrr α I )(amr M GGGGtGGO α I α )I (mr M OG
2GO
α I M
r α m )(a m F
r ω m )(a m F
OO
GtGt
G2
nGnPor lo tanto, las tres ecuaciones de movimiento para el cuerpo serán:

Dinámica del Cuerpo RígidoEcuaciones de Movimiento: movimiento en el plano general
=G
F2
F1
F4
F3
W
M1
M2
x
y
G
IGαm(aG)x
m(aG)y
maG

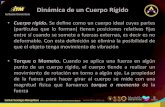
Dinámica del Cuerpo RígidoEcuaciones de Movimiento: movimiento en el plano generalEn la figura anterior se muestra un cuerpo (placa) que presenta un movimiento en el plano general, causado por un sistema de fuerzas externas y un par de momentos o torques. Se muestran los diagramas de cuerpo libre y cinético del cuerpo. El vector (maG) tiene la misma dirección que la aceleración del centro de masa del cuerpo.
α I M
)(a m F
)(a m F
GG
yGy
xGxSi se elige el sistema de coordenadas inerciales x y y, las tres ecuaciones escalares del movimiento serán:

Dinámica del Cuerpo RígidoProblemas de rotación por fricción
GP
r
GP
r
W = m g
N
F
x
y
α
aG
Si los cuerpos ruedan sobre una superficie áspera, debido a las cargas que se les aplica, no se sabe si ruedan sin derrapar, o si se desliza a medida que rueda.
Para el disco homogéneo de la figura, las ecuaciones de movimiento serán:
α I r F ;α I M
0 g m- N ;)(a m F
a m F- P ;)(a m F
GGG
yGy
GxGx

Dinámica del Cuerpo RígidoProblemas de rotación por fricciónLas tres ecuaciones anotadas contienen 4 incógnitas, F, N, α, aG, por lo que es necesaria una cuarta ecuación.
Rodadura pura. Si la fuerza de fricción F es lo bastante grande para permitir que el disco gire sin deslizarse, entonces se cumple que:
r α aG
Siendo µs es el coeficiente de fricción estática, no ocurrirá ningún deslizamiento si: N μ F sSin embargo, el disco desliza mientras rueda, y se requiere resolver de nuevo el problema cuando:
N μ F s

Dinámica del Cuerpo RígidoProblemas de rotación por fricciónRodadura y deslizamiento. En el caso de que exista deslizamiento, α y aG son independientes entre sí, de modo que:
r α aG
En lugar de ello, la magnitud de la fuerza de fricción se relaciona con la magnitud de la fuerza normal por medio del coeficiente de fricción cinética µk, es decir:
N μ F k

Dinámica del Cuerpo RígidoEnergía cinética
G
mivi
ri
ω Consideremos el cuerpo rígido de la figura, representado por una placa, rotando con velocidad angular ω con respecto al centro de masa G. Una i-ésima partícula arbitraria del cuerpo, con masa mi, se ubica en ri con respecto del centro de masa G.
En el instante en que se ilustra, la partícula tiene un velocidad vi, entonces la energía cinética de dicha partícula será:
2iii v m
21
E k

Dinámica del Cuerpo RígidoEnergía cinéticaLa energía cinética de todo el cuerpo será:
n
1i
22ii
n
1i
2ii
n
1iik ω r m
21
v m21
E E K
n
1i
2ii
2k r m ω
21
E donde: G
n
1i
2ii I r m
ω I 21
E 2Gk Energía cinética de rotación del cuerpo rígido
En general: ω I 21
E 2Ok
Energía cinética de rotación de un cuerpo rígido que rota en torno a un eje que atraviesa el punto O.

Dinámica del Cuerpo RígidoEnergía cinética: Traslación
vG = v
v
G
Cuerpo rígido de masa M sometido a una traslación rectilínea o curvilínea.
v M 21
E 2Gk

Dinámica del Cuerpo RígidoEnergía cinética: Rotación en torno de un eje fijo
G
O
vG
rG
ω El cuerpo rígido gira en torno de un eje fijo que atraviesa el punto O, tiene energía cinética de traslación y de rotación.
2G
2Gk ωI
21
v M 21
E
ω r v GG como: entonces:
22GG
2G
22Gk ω r M I
21
ωI21
ωr M 21
E
Por el teorema de Steiner:2
Ok ωI21
E

Dinámica del Cuerpo RígidoEnergía cinética: Movimiento en el plano general
G
vG
ω Cuando un cuerpo rígido está sujeto a un movimiento en el plano general, tiene una velocidad angular ω y su centro de masa tiene una velocidad vG. Por tanto la energía cinética será:
2G
2Gk ωI
21
v M 21
E

Dinámica del Cuerpo RígidoTrabajo de una fuerzaLas ecuaciones para el trabajo de una fuerza variable, el trabajo de una fuerza constante, el trabajo de un peso y el trabajo de la fuerza de un resorte, son las mismas que se aplican a una partícula.
Fuerzas que no realizan trabajo
Las fuerzas externas que no realizan trabajo alguno cuando un cuerpo se desplaza, son las que actúan sobre puntos fijos en el cuerpo o tienen una dirección perpendicular al desplazamiento.
G
W
N
Ff
ωEn la figura se muestran algunas de estas fuerzas como la Normal y el Peso de un cuerpo cuando el centro de gravedad de éste se mueve en un plano horizontal. Si existe rodadura pura la fuerza de fricción tampoco realiza trabajo ya que durante un instante actúa sobre un punto del cuerpo que tiene velocidad cero.

Dinámica del Cuerpo RígidoPrincipio del Trabajo y la EnergíaEn la dinámica de la partícula se analizó el principio del trabajo y la energía para una partícula. Si se aplica este principio a cada una de las partículas de un cuerpo rígido y se suman los resultados en forma algebraica, como la energía es un escalar, puede aplicarse este principio a un cuerpo rígido.
2211 kk EWE
Esta ecuación establece que las energías cinéticas iniciales de rotación y traslación del cuerpo, más el trabajo realizado por todas las fuerzas externas y momentos que actúan sobre el mismo mientras se desplaza de su posición inicial a la final, es igual a las energías cinéticas finales de rotación y traslación. Este principio se emplea para resolver problemas cinéticos que involucran velocidad, fuerza y desplazamiento.

Dinámica del Cuerpo RígidoConservación de la energíaCuando un sistema de fuerzas, que actúa sobre un cuerpo rígido, consta solo de fuerzas conservativas, es posible emplear el teorema de la conservación de la energía para resolver un problema. En el estudio de la dinámica de la partícula se demostró que el trabajo de una fuerza conservativa puede expresarse como la diferencia entre la energía potencial del cuerpo medida a partir de una referencia arbitraria, luego:
2p2k1p1k EEEE
Esta ecuación establece que la suma de las energías potencial y cinética del cuerpo permanece constante cuando este se desplaza de una posición a otra. Se emplea para resolver problemas que involucran velocidad, desplazamiento y sistemas de fuerzas conservativas; incluso fuerzas de fricción sobre cuerpos que se mueven con rodadura pura.

Dinámica del Cuerpo RígidoImpulso y Momento

Dinámica del Cuerpo RígidoConservación del momento angularSabemos que:
dtdL
M
Si la suma de los momentos originados por las fuerzas externas que actúan sobre el sistema es igual a cero, entonces:
0L
dtd
o lo que es lo mismo: cteL
es decir: 21 LL
(conservación del momento angular)
En el caso de un cuerpo rígido simple: 21 ωIωI GG