Sociedad Mexicana de Ingeniería Estructural - … · ANÁLISIS DE CONFIABILIDAD Y CRITERIOS DE...
15
1 Sociedad Mexicana de Ingeniería Estructural ANÁLISIS DE CONFIABILIDAD Y CRITERIOS DE DISEÑO DE PILOTES DE SUCCIÓN PARA SISTEMAS FLOTANTES EN AGUAS PROFUNDAS Francisco L. Silva González 1 , Ernesto Heredia Zavoni 2 , Celestino Valle Molina 3 , Jorge Sánchez Moreno 4 y Robert B. Gilbert 5 RESUMEN Se presenta un procedimiento para efectuar el análisis de confiabilidad de pilotes de succión utilizados como sistema de anclaje de plataformas flotantes de producción de hidrocarburos. El procedimiento se aplica para la generación de criterios de diseño basados en una filosofía de administración del riesgo y de confiabilidad. Se analiza la confiabilidad de pilotes de succión sometidos a cargas inclinadas por acción de las tensiones en las líneas de amarre de plataformas flotantes. La caracterización probabilista de la capacidad de carga del pilote de succión se realiza mediante el método de límite plástico y simulaciones de Monte Carlo. Para el modelado probabilista de las cargas de tensión en las líneas de amarre se utiliza superficies de respuesta en función de las variables meteorológicas y oceanográficas que definen estados de mar extremo producto de huracanes y nortes. Los análisis de confiabilidad se llevan a cabo con el método FORM. El procedimiento se ilustra con un ejemplo de aplicación en el que se define la ecuación de diseño y se calibran los factores de carga y resistencia para el estado límite último. Dicha calibración se realiza para pilotes de succión con líneas de amarre tipo catenaria y taut-leg. ABSTRACT A procedure to perform the reliability analysis of suction caissons for moorings of floating systems is presented. The procedure is applied to develop risk management and reliability-based design criteria. The reliability of soil-caisson system subject to mooring lines inclined loading is analyzed. The probabilistic modeling of caisson capacities is based on Monte Carlo simulations using the plastic limit method. Response surfaces as functions of environmental variables describing extreme sea states were used for the probabilistic modeling of mooring lines loading. Reliability analyses were carried using FORM. The procedure is illustrated with an application example where the design equation is defined and the partial safety factors for the ultimate limit state are calibrated separately for caissons in connection to catenary and taut-leg moorings. INTRODUCCIÓN Los pilotes de succión son uno de los principales tipos de cimentación utilizados en la práctica internacional como sistema de anclaje de plataformas flotantes de producción de hidrocarburos. Son factibles de instalarse tanto en aguas someras como en aguas profundas, y cuentan con capacidad para resistir cargas inclinadas de gran magnitud. Los pilotes de succión son elementos cilíndricos de acero huecos, cerrados en su parte superior y abiertos en su parte inferior que cuentan con una oreja a la cual se conectan las líneas de amarre de las plataformas flotantes (ver figura 1). El proceso de instalación tiene dos fases; en una primera fase el pilote penetra el suelo debido a su peso propio; en la segunda fase el pilote desciende hasta alcanzar la profundidad de diseño mediante la succión que se genera extrayendo el agua contenida en su interior mediante un proceso de bombeo. 1 Instituto Mexicano del Petróleo, Eje Central Lázaro Cárdenas Norte N° 152, Col. San Bartolo Atepehuacán, Del. Gustavo A. Madero, México D.F., Tel. 9175-8238, [email protected] , [email protected] 2 , [email protected] 3 , [email protected] 4 5 Department of Civil Engineering, The University of Texas at Austin, Austin, Texas, 78712, [email protected]
Transcript of Sociedad Mexicana de Ingeniería Estructural - … · ANÁLISIS DE CONFIABILIDAD Y CRITERIOS DE...

1
Sociedad Mexicana de Ingeniería Estructural
ANÁLISIS DE CONFIABILIDAD Y CRITERIOS DE DISEÑO DE PILOTES DE SUCCIÓN PARA SISTEMAS FLOTANTES EN AGUAS PROFUNDAS
Francisco L. Silva González1, Ernesto Heredia Zavoni2, Celestino Valle Molina3, Jorge Sánchez Moreno4 y Robert B. Gilbert5
RESUMEN
Se presenta un procedimiento para efectuar el análisis de confiabilidad de pilotes de succión utilizados como sistema de anclaje de plataformas flotantes de producción de hidrocarburos. El procedimiento se aplica para la generación de criterios de diseño basados en una filosofía de administración del riesgo y de confiabilidad. Se analiza la confiabilidad de pilotes de succión sometidos a cargas inclinadas por acción de las tensiones en las líneas de amarre de plataformas flotantes. La caracterización probabilista de la capacidad de carga del pilote de succión se realiza mediante el método de límite plástico y simulaciones de Monte Carlo. Para el modelado probabilista de las cargas de tensión en las líneas de amarre se utiliza superficies de respuesta en función de las variables meteorológicas y oceanográficas que definen estados de mar extremo producto de huracanes y nortes. Los análisis de confiabilidad se llevan a cabo con el método FORM. El procedimiento se ilustra con un ejemplo de aplicación en el que se define la ecuación de diseño y se calibran los factores de carga y resistencia para el estado límite último. Dicha calibración se realiza para pilotes de succión con líneas de amarre tipo catenaria y taut-leg.
ABSTRACT
A procedure to perform the reliability analysis of suction caissons for moorings of floating systems is presented. The procedure is applied to develop risk management and reliability-based design criteria. The reliability of soil-caisson system subject to mooring lines inclined loading is analyzed. The probabilistic modeling of caisson capacities is based on Monte Carlo simulations using the plastic limit method. Response surfaces as functions of environmental variables describing extreme sea states were used for the probabilistic modeling of mooring lines loading. Reliability analyses were carried using FORM. The procedure is illustrated with an application example where the design equation is defined and the partial safety factors for the ultimate limit state are calibrated separately for caissons in connection to catenary and taut-leg moorings.
INTRODUCCIÓN
Los pilotes de succión son uno de los principales tipos de cimentación utilizados en la práctica internacional como sistema de anclaje de plataformas flotantes de producción de hidrocarburos. Son factibles de instalarse tanto en aguas someras como en aguas profundas, y cuentan con capacidad para resistir cargas inclinadas de gran magnitud. Los pilotes de succión son elementos cilíndricos de acero huecos, cerrados en su parte superior y abiertos en su parte inferior que cuentan con una oreja a la cual se conectan las líneas de amarre de las plataformas flotantes (ver figura 1). El proceso de instalación tiene dos fases; en una primera fase el pilote penetra el suelo debido a su peso propio; en la segunda fase el pilote desciende hasta alcanzar la profundidad de diseño mediante la succión que se genera extrayendo el agua contenida en su interior mediante un proceso de bombeo.
1 Instituto Mexicano del Petróleo, Eje Central Lázaro Cárdenas Norte N° 152, Col. San Bartolo Atepehuacán, Del. Gustavo A. Madero, México D.F., Tel. 9175-8238, [email protected], [email protected], [email protected], [email protected]
5 Department of Civil Engineering, The University of Texas at Austin, Austin, Texas, 78712, [email protected]

XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
2
Una de las necesidades de la industria petrolera mexicana es contar con criterios para el diseño de los diferentes elementos que conforman una plataforma flotante de producción. Es deseable que mediante la aplicación de dichos criterios se proporcionen niveles de confiabilidad aceptables para la industria nacional considerando las características del peligro metoceánico y las condiciones geotécnicas locales de los campos mexicanos en el Golfo de México, así como con las condiciones y filosofía de operación. Det Norske Veritas ha establecido recomendaciones prácticas para el diseño geotécnico de pilotes de succión instalados en arcillas normalmente consolidadas (ver DNV-RP-E303 de DNV (2005)). Dichas recomendaciones contienen un criterio de diseño general aplicable a pilotes de succión con cualquier tipo de líneas de amarre y plantean la ecuación de diseño considerando la pérdida de tensión debida a la interacción suelo-cadena a lo largo de la parte embebida de la línea de amarre desde el lecho marino hasta la oreja del pilote. La formulación de una ecuación de diseño en la oreja del pilote debe considerar que tanto la capacidad resistente como las cargas actuantes dependen de las propiedades geotécnicas del suelo. Por lo tanto, los análisis de confiabilidad para la calibración de factores de carga y resistencia, y generación de criterios de diseño tendrían que tomar en cuenta la correlación entre la capacidad resistente y las cargas actuantes en la oreja del pilote. Una mejor alternativa es efectuar los análisis de confiabilidad considerando tanto las cargas de tensión de las líneas de amarre como la capacidad del sistema suelo-pilote de succión evaluadas en el lecho marino.
(a) (b)
Figura 1. a) Sistema de amarre, b) Pilote de succión (tomado de Andersen et. al.,2005). En este artículo se muestra un procedimiento para calcular la confiabilidad de pilotes de succión para fines de la generación de criterios de diseño basados en una filosofía de riesgo y confiabilidad. Se consideran pilotes instalados en arcillas normalmente consolidadas, que es el predominante en sitios en aguas profundas. La función de estado límite se plantea a nivel del lecho marino donde las tensiones de las líneas de amarre y la capacidad del sistema suelo-pilote no están correlacionadas. Se muestra cómo caracterizar probabilísticamente la capacidad de carga de los pilotes usando el método de límite plástico y simulación de Monte Carlo. Las cargas de tensión de las líneas de amarre se modelan mediante teoría de procesos aleatorios y haciendo uso de superficies de respuesta en función de las variables oceanográficas que definen estados de mar extremo. El método propuesto se ilustra mediante un ejemplo de aplicación en el que se calibran factores de carga y resistencia para el estado límite último. La calibración se realiza para sistemas de amarre tipo catenaria y sistema taut-leg por separado.
FUNCIÓN DE ESTADO LÍMITE
Este trabajo considera el estado límite último de pilotes de succión. Tanto las tensiones de las líneas de amarre como la capacidad de carga del pilote de succión se determinan a nivel del lecho marino, donde éstas pueden considerarse como variables estadísticamente independientes (Choi, 2007). El margen de seguridad está definido por la ecuación 1.
OrejaPilote de succión
Lecho marino
Sistema de amarre
FPSO
3
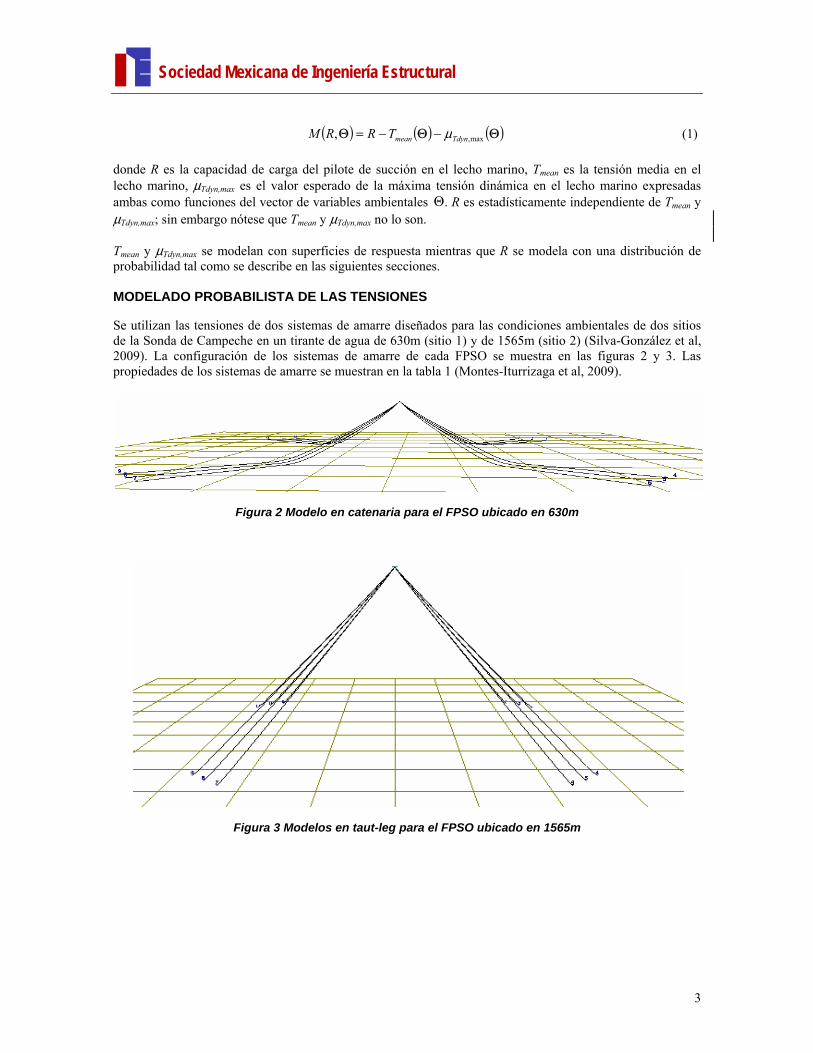
Sociedad Mexicana de Ingeniería Estructural ( ) ( ) ( )ΘΘΘ max,, TdynmeanTRRM μ−−= (1) donde R es la capacidad de carga del pilote de succión en el lecho marino, Tmean es la tensión media en el lecho marino, μTdyn,max es el valor esperado de la máxima tensión dinámica en el lecho marino expresadas ambas como funciones del vector de variables ambientales Θ. R es estadísticamente independiente de Tmean y μTdyn,max; sin embargo nótese que Tmean y μTdyn,max no lo son. Tmean y μTdyn,max se modelan con superficies de respuesta mientras que R se modela con una distribución de probabilidad tal como se describe en las siguientes secciones. MODELADO PROBABILISTA DE LAS TENSIONES
Se utilizan las tensiones de dos sistemas de amarre diseñados para las condiciones ambientales de dos sitios de la Sonda de Campeche en un tirante de agua de 630m (sitio 1) y de 1565m (sitio 2) (Silva-González et al, 2009). La configuración de los sistemas de amarre de cada FPSO se muestra en las figuras 2 y 3. Las propiedades de los sistemas de amarre se muestran en la tabla 1 (Montes-Iturrizaga et al, 2009).
Figura 2 Modelo en catenaria para el FPSO ubicado en 630m
Figura 3 Modelos en taut-leg para el FPSO ubicado en 1565m
XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
4
Tabla 1 Propiedades de los sistemas de amarre
Sitio Segmento Material Carga mínima
de ruptura (t)
Longitud, L (m)
Diámetro del cable o del eslabón (m)
Número de elementos
1 (630m)
1 Cadena 1423 1300 0.122 3552
2 Poliéster 1560 950 0.232 126
3 Cadena 1423 285 0.122 779
2 (1565m)
1 Cadena 2018 150 0.150 333
2 Poliéster 2052 2000 0.248 248
3 Cadena 2018 150 0.150 333
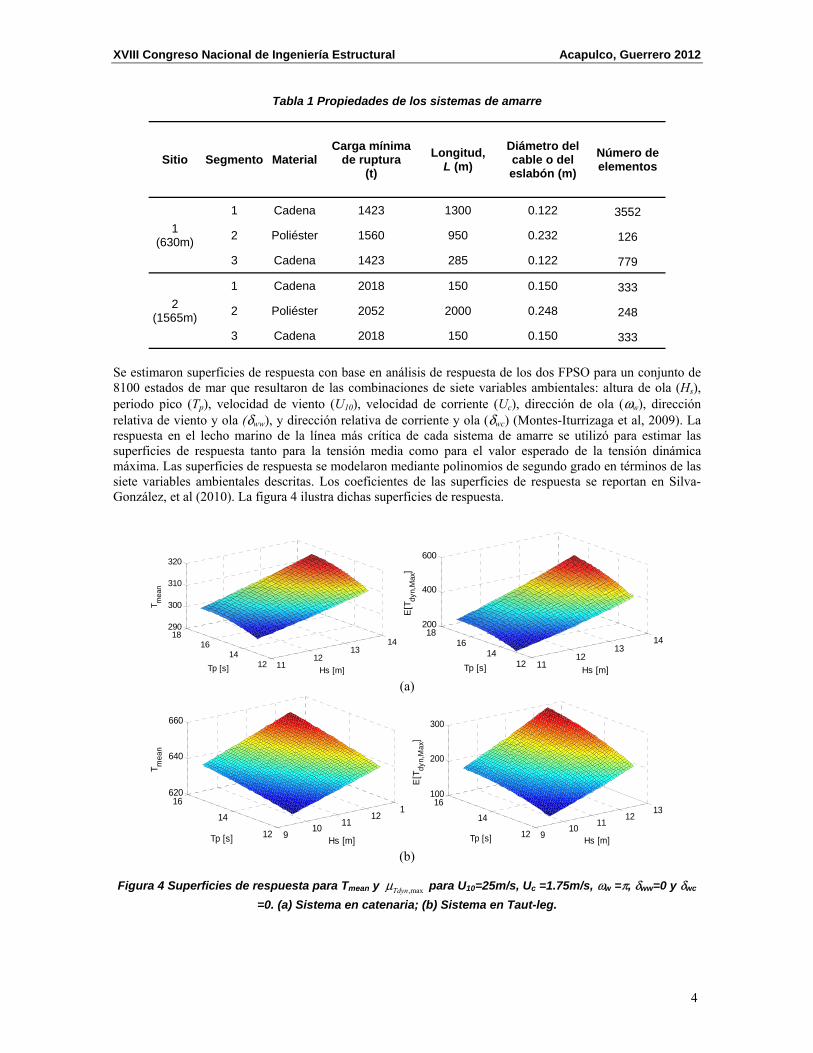
Se estimaron superficies de respuesta con base en análisis de respuesta de los dos FPSO para un conjunto de 8100 estados de mar que resultaron de las combinaciones de siete variables ambientales: altura de ola (Hs), periodo pico (Tp), velocidad de viento (U10), velocidad de corriente (Uc), dirección de ola (ωw), dirección relativa de viento y ola (δww), y dirección relativa de corriente y ola (δwc) (Montes-Iturrizaga et al, 2009). La respuesta en el lecho marino de la línea más crítica de cada sistema de amarre se utilizó para estimar las superficies de respuesta tanto para la tensión media como para el valor esperado de la tensión dinámica máxima. Las superficies de respuesta se modelaron mediante polinomios de segundo grado en términos de las siete variables ambientales descritas. Los coeficientes de las superficies de respuesta se reportan en Silva-González, et al (2010). La figura 4 ilustra dichas superficies de respuesta.
(a)
(b)
Figura 4 Superficies de respuesta para Tmean y max,Tdynμ para U10=25m/s, Uc =1.75m/s, ωw =π, δww=0 y δwc =0. (a) Sistema en catenaria; (b) Sistema en Taut-leg.
1112
1314
1214
1618
290
300
310
320
Hs [m]Tp [s]
T mea
n
1112
1314
1214
1618
200
400
600
Hs [m]Tp [s]
E[T
dyn,
Max
]
910 11
121
12
14
16620
640
660
Hs [m]Tp [s]
T mea
n
910 11
1213
12
14
16100
200
300
Hs [m]Tp [s]
E[T
dyn,
Max
]

5
Sociedad Mexicana de Ingeniería EstructuralEl ángulo de la línea de amarre a nivel del lecho marino es igual a μθo=1° para el FPSO con el sistema de amarre en catenaria y μθo=36° para el FPSO con el sistema de amarre tipo taut-leg. En la modelación de las cargas de tensión de las líneas de amarre se incluyeron solamente las variables aleatorias más significativas, es decir, se consideró que ( )10,, UTH ps=Θ . La distribución de probabilidad conjunta de las variables ambientales de cada uno de los sitios se describe en Montes-Iturrizaga (2011). Ésta se modeló con la distribución de Nataf, donde las distribuciones marginales y la matriz de correlación se estimaron usando datos de hindcast de huracanes y tormentas de invierno. Los estimadores de máxima verosimilitud de la tasa media anual de eventos extremo λ es 54/41=1.32 por año para el sitio 1 y 58/41=1.41 por año para el sitio 2. La tabla 2 muestra los parámetros de las distribuciones conjuntas de las variables ambientales.
Tabla 2 Parámetros de la distribución conjunta de variables ambientales.
Variables Distribución de probabilidad Parámetros Sitio 1 (630m) Sitio 2 (1565m)
Altura de ola significante,
Hs
Weibull de 3-parámetros
Escala 2.46 2.08
Forma 1.47 1.21
Localización 4.0 4.0
Periodo pico, Tp
Lognormal μlnTp 2.43 2.41
σlnTp 0.119 0.118 Velocidad de viento,
U10 Lognormal
μlnU10 2.80 2.79
σlnU10 0.163 0.159
Matriz de correlación ΘT=(Hs,Tp,U10) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=ΘΘ
00.11446.07732.000.16714.0
00.1 symC
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=ΘΘ
1.000.39900.79101.000.7485
sym1.00C
MODELADO PROBABILISTA DE LA CAPACIDAD DE CARGA
Información geotécnica
Se consideraron perfiles lineales medios de resistencia al corte inalterada y remoldeada definidos por un valor Su0=1.92 kPa en el lecho marino y un gradiente Su1=1.18 kPa/m, y un valor Su0,r=0.70 kPa en el lecho marino y un gradiente Su1,r=0.53 kPa/m, respectivamente. Distribución de probabilidad de la capacidad
R se modela con una distribución de probabilidad mixta formada por una distribución lognormal truncada en el valor rLB más una concentración de probabilidad en dicho valor (Gilbert et al., 2005). rLB corresponde al límite inferior de la capacidad, el cual se estima en este trabajo como la media de la capacidad obtenida con el suelo remoldeado. La concentración de probabilidad es igual a la probabilidad de que la capacidad sea menor que rLB. El modelo se ilustra en la figura 5.

XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
6
Figura 5 Distribución de probabilidad de la capacidad
Para determinar los factores de carga y resistencia que conforman un criterio de diseño basado en riesgo y confiabilidad, se requiere generar casos de diseño que tengan un nivel de confiabilidad cercano al nivel objetivo del criterio de diseño. Resulta entonces de interés obtener la distribución de probabilidad de la capacidad en función de la longitud del pilote (Lf) y de la relación de esbeltez (longitud/diámetro, Lf/D) para poder estimar las dimensiones del pilote mediante análisis de confiabilidad. Enseguida se define la distribución de probabilidad de la capacidad de pilotes de succión con diámetros que varían de 3m a 6m y relaciones Lf/D=4, 5, 6. En la tabla 3 se muestran las características geométricas de 3 grupos de pilotes de succión para cada uno de los sistemas de amarre.
Tabla 3 Grupos de pilotes empleados para estimar la distribución de probabilidad de la capacidad
Grupo FPSO Lf/D D [m] Lf [m] μθo [°] μθa [°] μθa,rem [°]
C-4 630m 4 3 a 6 12 a 24 1 21.59 13.82
C-5 630m 5 3 a 6 15 a 30 1 26.96 17.19
C-6 630m 6 3 a 6 18 a 36 1 32.53 20.64
T-4 1565m 4 3 a 6 12 a 24 36 39.83 37.68
T-5 1565m 5 3 a 6 15 a 30 36 41.70 38.52
T-6 1565m 6 3 a 6 18 a 36 36 43.88 39.53
μθa y μθa,rem son los valores medios de los ángulos de la línea de amarre en la oreja del pilote para el suelo inalterado y remoldeado, respectivamente. Estos se obtienen con el método de Neubecker y Randolph (1995) a partir de la media de la tensión total en el lecho marino, el ángulo μθo y los perfiles promedios inalterado y remoldeado. Las variables aleatorias consideradas son: el gradiente de la resistencia al corte Su1, el factor de adherencia α, el factor de capacidad Nab y el ángulo de aplicación de la carga en la oreja θa. El factor de adherencia representa la magnitud de fricción entre la pared o fuste de un pilote y el suelo, y es ampliamente utilizado para la evaluación de la capacidad de carga por fricción en el fuste. El factor de capacidad por punta es utilizado para determinar la capacidad de carga por punta en tensión del pilote y es alrededor del 80% del factor de capacidad por punta en compresión. El perfil de resistencia al corte Su se modela como un perfil lognormalmente distribuido con valor medio igual al perfil promedio inalterado y considerando un coeficiente de variación δSu1=0.20 (Clukey y Banon, 2000). Las variables α y Nab se modelaron como conjuntamente
Capacidad de carga (r)
p R(r)
y f R
(r)
p
rLB
Área=1-p
pR(r)=p=FR(rLB) ; r=rLB
fR(r)=Densidad lognormal ; r>rLB

7
Sociedad Mexicana de Ingeniería Estructurallognormales con valores medios μα=0.8 y μNab=11, coeficientes de variación: δα =0.2 y δNab =0.25, y coeficiente de correlación: ρ = -0.8. El ángulo de aplicación de la carga en la oreja se definió como: =+ ∆ donde Δθa es una variable aleatoria normalmente distribuida con valor medio igual a cero y desviación estándar igual a 2°. La distribución de la capacidad de carga en el lecho marino se determinó generando muestras aleatorias de (Su1, α, Nab, θa) y calculando la capacidad de carga con el método de límite plástico propuesto por Aubeny et al., (2003a,b,c). Se observó que 5000 simulaciones fueron suficientes para describir razonablemente bien dicha distribución. La figura 6a muestra el histograma de la capacidad de carga para uno de los pilotes del grupo C-6. Con el método de máxima verosimilitud se determinaron los parámetros de la distribución mixta. La figura 6b muestra el ajuste de dicha distribución para el pilote del grupo C-6.
(a) (b)
Figura 6 Distribución de probabilidad de la capacidad para un pilote del grupo C-6 con Lf=30m y Lf/D=6, con suelo inalterado. a) Histograma de capacidad de carga, b) Ajuste de la distribución
lognormal Con las distribuciones ajustadas se determinó la media, la desviación estándar y el coeficiente de variación de la capacidad de carga. Se observó que la media de la capacidad de carga en el lecho marino es en promedio 3% mayor que la media de la capacidad en la oreja para el sistema de amarre en catenaria. Para el sistema de amarre en taut-leg la capacidad de carga en el lecho marino es promedio 2% mayor que la media de la capacidad de carga en la oreja. También se observó que la desviación estándar de la capacidad de los pilotes con líneas de amarre en catenaria y relación Lf/D=4 fue 10% mayor que la de las líneas de amarre en taut-leg, 20% mayor para los de relación Lf/D=5, y 30% mayor para los de relación Lf/D=6. Se ajustaron modelos de segundo grado a la variación de la media y desviación estándar de la capacidad de carga con la longitud del pilote, para cada uno de los grupos de pilotes. La figura 7 muestra dicha variación para los pilotes del grupo C-6 y la figura 8 para los pilotes del grupo T-6.
0 2 4 6
x 104
0
50
100
150
200
250
Capacidad de carga del pilote [kN]
frecu
enci
a ab
solu
ta
1 2 3 4 5 6
x 104
10-5
10-4
10-3
10-2
10-1
100
Capacidad de carga del pilote en el lecho marino [kN]
e ca
rga
del p
ilote
en
el le
cho
mar
ino
[kN
](Cap
acid
ad d
e ca
rga
del p
ilote
en
el le
c
Distribución Lognormal
ObservacionesDistribución ajustada

XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
8
Figura 7 Ajuste de un polinomio de segundo grado a la media y desviación estándar de la capacidad de
los pilotes del grupo C-6
Figura 8 Ajuste de un polinomio de segundo grado a la media y desviación estándar de la capacidad de
los pilotes del grupo T-6 Se llevaron a cabo ajustes similares para determinar el límite inferior de la capacidad (rLB) pero usando el perfil promedio remoldeado y un coeficiente de variación igual a δSu1,r=0.05. Se observó que la relación entre el límite inferior de la capacidad (considerado como la media de la capacidad remoldeada) y la mediana de la capacidad de carga inalterada (mR) fue en promedio igual a 48% para el sistema en catenaria y 52% para el sistema en taut-leg.
10 20 30 400.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5x 10
4
Lf[m]
μ [k
N]
Lecho marino, L/D=6
10 20 30 401000
2000
3000
4000
5000
6000
7000
8000
9000
10000
11000
Lf[m]
σ [k
N]
Lecho marino, L/D=6
10 20 30 400.5
1
1.5
2
2.5
3
3.5
4
4.5x 104
Lf[m]
μ [k
N]
Lecho marino, L/D=6
10 20 30 401000
2000
3000
4000
5000
6000
7000
8000
Lf[m]
σ [k
N]
Lecho marino, L/D=6

9
Sociedad Mexicana de Ingeniería EstructuralANÁLISIS DE CONFIABILIDAD
Se llevaron a cabo análisis de confiabilidad de pilotes con diferentes longitudes y relaciones Lf/D de cada uno de los sistemas de amarre considerados utilizando el método FORM. Para evitar problemas de convergencia, la distribución mixta de probabilidad de la capacidad de carga se modela bajo la siguiente consideración: la probabilidad finita concentrada en el límite inferior rLB se aproxima con una distribución gausiana muy angosta y pesada apropiadamente para asegurar que el área debajo de la densidad de probabilidad mixta de la capacidad sea igual a uno, Melchers et. al. (2003). En las figuras 9 a 11 se muestra la variación del logaritmo de la probabilidad de falla con la longitud del pilote como una función de Lf/D para ambos sistemas de amarre. Se observa que se puede asumir una relación lineal entre esas dos cantidades. Estos resultados son de gran utilidad para el análisis costo-beneficio en el ciclo de vida donde se requiere modelar los costos iniciales como una función de la probabilidad de falla. La pendiente de la relación Log(pfa)-Lf define el incremento de longitud necesario para reducir la probabilidad de falla en un orden de magnitud.
Figura 9 Logaritmo de la probabilidad de falla anual vs. longitud del pilote para sistemas de amarre en
catenaria y taut-leg; Lf/D=4
Figura 10 Logaritmo de la probabilidad de falla anual vs. longitud del pilote para sistemas de amarre
en catenaria y taut-leg; Lf/D=5
Log(pFa) = -0.6597Lf + 7.1321
Log(pFa) = -0.8086Lf + 11.974
-6
-5
-4
-3
-2
-1
010 12 14 16 18 20 22
Log
(pFa
)
Lf (m)
CatenariaTaut-leg
Log(pFa) = -0.6033Lf + 7.1353
Log(pFa) = -0.7299Lf + 12.532
-7
-6
-5
-4
-3
-2
-114 16 18 20 22 24 26
Log
(pFa
)
Lf (m)
CatenariaTaut-leg

XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
10
Figura 11 Logaritmo de la probabilidad de falla anual vs. longitud del pilote para sistemas de amarre
en catenaria y taut-leg; Lf/D=6 Se observa que para probabilidades de falla anuales entre 10-4 y 10-5, típicamente utilizadas para diseño, las longitudes de los pilotes de succión varían de 19.6m a 20.8m para Lf/D=4, de 22.5m a 24.0m para Lf/D=5, de 25.2m a 26.8m para Lf/D=6 en el caso de sistema de amarre en taut-leg. En el caso de un sistema de amarre en catenaria varían de 16.8m a 18.4m para Lf/D=4, de 18.5m a 20.0m para Lf/D=5, de 20.4m a 22.5m para Lf/D=6. También se observa que las pendientes de la relación Log(pfa)-Lf son mayores en el caso de pilotes con líneas en taut-leg que para el caso del sistema en catenaria. Para Lf/D=4 se requiere incrementar la longitud en 1.24m en taut-leg y 1.52m para catenaria. Para Lf/D=5 se requiere incrementar la longitud en 1.37m en taut-leg y 1.66m para catenaria. Para Lf/D=6 se requiere incrementar la longitud en 1.52m en taut-leg y 1.91m para catenaria. Considerando las longitudes de los pilotes para probabilidades de falla entre 10-4 y 10-5, estos incrementos son del orden de 6% para taut-leg y de 9% para catenaria, lo que se traduce en un incremento de volumen de acero de 20% y 30% para sistemas en taut-leg y catenaria respectivamente. Se observa también que entre mayor es la relación Lf/D mayor es el incremento de la longitud necesaria para reducir en un orden de magnitud la probabilidad de falla.
CALIBRACIÓN DE FACTORES DE CARGA Y RESISTENCIA
El procedimiento para efectuar análisis de confiabilidad de pilotes de succión descrito en la sección anterior puede emplearse para generar un criterio de diseño basado en riesgo y confiabilidad. En particular, dicho procedimiento es útil en la calibración de factores de carga y resistencia. En códigos recientes, la calibración se lleva a cabo a través de un proceso de optimación de una función que depende del nivel de confiabilidad objetivo y donde los factores de carga y resistencia son las variables de control. Los factores de carga y resistencia así calculados garantizan que un conjunto de estructuras diseñadas posean una confiabilidad lo más cercana posible a la confiabilidad objetivo. Definida la confiabilidad objetivo β0 y m diseños de referencia representativos del tipo de los sistemas en los que la ecuación de diseño se pretende aplicar (también conocidos como casos de diseño), la calibración de los factores de carga y resistencia consiste básicamente en resolver el problema de optimización definido por la ecuación (2).
( )( ) ⎥
⎦
⎤⎢⎣
⎡⋅−=Δ ∑
=
m
jjij f
i 1
20min βγβ
γ (2)
donde βj es la confiabilidad para el caso de diseño j obtenida con un conjunto de factores de carga y
resistencia γi, fj son los pesos, factores de importancia o frecuencias relativas fj > 0 ( 11
=∑=
m
jjf ) de los casos de
Log(pFa) = -0.5222Lf + 6.7615
Log(pFa) = -0.658Lf + 12.623
-5.5
-5
-4.5
-4
-3.5
-3
-2.5
-216 18 20 22 24 26 28
Log
(pFa
)
Lf (m)
CatenariaTaut-leg

11
Sociedad Mexicana de Ingeniería Estructuraldiseño. La formulación general de los métodos de calibración se describe por ejemplo en: Galambos, et al. (1982), Ravindra y Lind (1973), Thoft- Christensen y Baker (1982), Nowak y Collins (1976), Gayton, et al (2004), Madsen et al (1986), Ditlevsen y Madsen (1996). El procedimiento de calibración empleado en este trabajo se describe en Silva-González, et al. (2012a). El primer paso es generar los casos de diseño de tal forma que cumplan con el índice de confiabilidad objetivo. Luego, usando los valores característicos de las variables de la ecuación de diseño (RC, Tmean-C, μTdyn-
C) y las coordenadas de los puntos de diseño (RD, Tmean-D, μTdyn-D) determinadas mediante análisis de confiabilidad, se obtiene un conjunto de factores de carga y resistencia asociado a cada uno de ellos.
jCTdyn
jDTdynjdyn
jCmean
jDmeanjmean
jD
jCjR T
TRR
,
,,
,
,,
,
,, ;;
−
−
−
− ===μμ
γγγ (3)
Con el fin de obtener un juego único de factores de carga y resistencia se pueden emplear criterios tales como tomar el promedio o el máximo valor de dichos factores. Utilizando estos factores, se generan aleatoriamente varios diseños y se calcula su confiabilidad. Los factores de carga y resistencia óptimos corresponderán a los que tengan asociada la menor pérdida de confiabilidad Δ. Enseguida se realiza la calibración de factores de carga y resistencia para sistemas de amarre tipo catenaria y sistema taut-leg por separado. Se considera que ésto es lo más apropiado ya que: 1) la contribución de la tensión dinámica a la tensión total es mucho mayor en el caso de un sistema en catenaria que en un sistema en taut-leg; 2) la capacidad resistente del pilote está gobernada por diferentes mecanismos de falla dependiendo de la inclinación de la carga: falla lateral en un sistema en catenaria y falla axial en un sistema en taut-leg; y 3) el límite inferior de la capacidad de carga para el sistema en taut-leg es mayor por la influencia del peso neto del pilote. ECUACIÓN DE DISEÑO
La ecuación de diseño está definida por la ecuación (4).
0≥−− −− dynCTdynmeanCmean
R
C TR γμγγ
(4)
donde:
• Rc es el valor característico de la capacidad de carga en el lecho marino. Se calcula con el perfil característico de resistencia al corte definido en este trabajo por Su0=1.32kPa y Su1=1.07 kPa/m y los valores Nab=9, α=0.8 (Silva-González, et al; 2011).
• CmeanT − es el valor característico de la tensión media en el lecho marino (pretensión y cargas ambientales medias).
• CTdyn−μ es el valor característico de la tensión dinámica en el lecho marino (debida a eventos extremo con componentes en baja frecuencia y frecuencia de ola)
• γR es el factor de capacidad de carga • γmean es el factor de carga para la componente media de la tensión • γdyn es el factor de carga para la componente dinámica de la tensión
CmeanT − y CTdyn−μ son los valores de las tensiones en la línea de amarre crítica obtenidas de contornos de
peligro ambiental asociados con periodo de retorno de 100 años (Silva-González, et al; 2012b). ÍNDICE DE CONFIABILIDAD OBJETIVO
Los factores de carga y resistencia se calibran para un índice de confiabilidad anual objetivo igual a β0=4.2, el cual corresponde a una probabilidad de falla anual pf,0=1.19×10-5. Este índice se determinó a través de un análisis de riesgo de falla de pilotes de succión y un análisis de costo-beneficio en el ciclo de vida. Se

XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
12
desarrolló una red Bayesiana para la estimación de las consecuencias de falla tales como la falla del sistema de amarre, la pérdida de vidas, el derrame de petróleo, daño a los risers, daño a otras instalaciones, evacuación de personal y paro de producción. El marco metodológico para el uso de redes Bayesianas en el desarrollo de modelos de consecuencias y en el análisis de riesgo, así como su aplicación en la toma de decisiones sobre índices de confiabilidad objetivo para criterios de diseño se puede consultar en Faber et al. (2012) y Heredia-Zavoni et al. (2012). Para una descripción detallada del cálculo del índice de confiabilidad objetivo utilizado en este trabajo para pilotes de succión véase Rendón-Conde et al (2012) y Silva-González, et al (2011). CASOS DE DISEÑO
Los casos de diseño se generan a partir de los pilotes de referencia mostrados en la tabla 3 y los resultados mostrados en las figuras 9 a 11. Los casos de diseño se muestran en la tabla 4.
Tabla 4 Casos de diseño para el sistema en catenaria y sistema en taut-leg
Caso Longitud Lf (m)
Diámetro D (m)
Índice de confiabilidad
anual βanual
Ángulo en la oreja θa (°)
Capacidad característica
en la oreja Ra-C (kN)
Capacidad característica
en el lecho marino RC (kN)
Ángulo en el lecho
marino θ0 (°)
C-4 18.20 4.550 4.20 13.95 10660.11 11667.78 1.01
C-5 19.96 3.992 4.20 14.91 11127.22 12252.61 1.11
C-6 22.27 3.712 4.20 15.41 12707.28 14047.33 1.05
T-4 20.78 5.195 4.20 38.50 14382.33 14631.27 36.0
T-5 23.85 4.770 4.20 39.05 14902.99 15222.17 36.0
T-6 26.60 4.433 4.20 39.65 15245.79 15638.88 36.0
FACTORES DE CARGA Y RESISTENCIA ÓPTIMOS
Se llevan a cabo dos calibraciones de factores de carga y resistencia, una para el sistema en catenaria y otra para el sistema en taut-leg. En la tabla 5 se muestran los factores de carga y resistencia asociados con los casos de diseño de los dos sistemas de amarre considerados.
Tabla 5 Factores de carga y resistencia
Caso RC (kN)
RD (kN) γR
Tmean-C (kN)
Tmean-D (kN) γmean μTdyn-C
(kN) μTdyn-D (kN)
γdyn
C-4 11667.78 9771.84 1.19 2870.88 3175.53 1.11 2276.94 6322.59 2.78
C-5 12252.61 9774.40 1.25 2870.88 3175.53 1.11 2276.94 6322.59 2.78
C-6 14047.33 9784.87 1.44 2870.88 3175.53 1.11 2276.94 6322.59 2.78
T-4 14631.27 11421.76 1.28 6200.26 6621.23 1.07 2129.15 4507.02 2.12
T-5 15222.17 11424.62 1.33 6200.26 6621.23 1.07 2129.15 4507.02 2.12
T-6 15638.88 11419.15 1.37 6200.26 6621.23 1.07 2129.15 4507.02 2.12
Los factores máximos y promedio para cada sistema en catenaria se muestran en la tabla 6.

13
Sociedad Mexicana de Ingeniería EstructuralTabla 6 Factores de carga y resistencia, máximos y promedio
Factor
Catenaria Taut-leg
Máximos Promedio Máximos Promedio
γR 1.44 1.29 1.37 1.33
γmean 1.11 1.11 1.07 1.07
γdyn 2.78 2.78 2.12 2.12
Se observa que el factor de seguridad de capacidad promedio es 3% mayor en el caso de los pilotes con sistema taut-leg que para el sistema en catenaria. El factor de seguridad para la componente media de la tensión es 4% mayor en el caso de pilotes con sistema en catenaria. El factor de seguridad para la componente dinámica de la tensión es 31% mayor en el caso de los pilotes con sistema en catenaria que para los de taut-leg, lo cual se debe a que la tensión dinámica tiene mayor contribución a la tensión total en esos sistemas. Estas diferencias en los factores de carga y resistencia se deben además a que el mecanismo de falla que controla la capacidad de carga y el límite inferior de la capacidad de los pilotes de succión, son diferentes para cada tipo de sistema de amarre.
CONCLUSIONES
Se presentó un método para llevar a cabo el análisis de confiabilidad de pilotes de succión. El margen de seguridad se planteó a nivel del lecho marino lo que permite considerar, para efectos del análisis de confiabilidad, que la capacidad de carga del pilote y las cargas de tensión en las líneas de amarre son estadísticamente independientes. La distribución de probabilidad de la capacidad de carga del pilote de succión se modeló mediante una distribución de probabilidad mixta que considera un límite inferior de la capacidad de carga producto de la resistencia al corte remoldeada del suelo. Se propuso definir dicha distribución a través de expresiones que proporcionan sus parámetros en función de la longitud del pilote. Las cargas de tensión de las líneas de amarre se modelaron mediante teoría de procesos aleatorios y haciendo uso de superficies de respuesta en función de las variables oceanográficas que definen estados de mar extremo. Los análisis de confiabilidad se llevaron a cabo con FORM. Para evitar problemas de convergencia, la probabilidad finita concentrada en el límite inferior de la capacidad se aproximó con una distribución gausiana muy angosta pesada apropiadamente para asegurar que el área debajo de la densidad de probabilidad mixta de la capacidad fuera igual a uno. El método propuesto se aplicó para la calibración de los factores de carga y resistencia para el diseño de pilotes de succión con sistemas de amarre en catenaria y taut-leg. La ecuación de diseño se planteó también a nivel del lecho marino. Los resultados mostraron que, a diferencia del estado actual de la práctica, deben desarrollarse criterios de diseño acorde con el tipo de sistema de amarre utilizado para conectar los pilotes de succión.
REFERENCIAS
Andersen K.H., Murff J.D., Randolph M.F., Clukey E.C., Erbrich C., Jostad H.P., Hansen B., Aubeny C., Sharma P., y Supachawarote C., (2005) “Suction anchors for deepwater applications”, Keynote Lecture; Int. Symp. on Frontiers in Offshore Geotechnics, ISFOG. Sept. 2005, Perth, Western Australia. Proc. A.A. Balkema Publishers. Auveny C.P., Han S. y Murff J., (2003a). “Refined Model for Inclined Load Capacity of Suction Caissons”, OMAE, Workshop of Offshore Geotechnics, Cancún, México.

XVIII Congreso Nacional de Ingeniería Estructural Acapulco, Guerrero 2012
14
Auveny C.P., Han S. y Murff J., (2003b). “Inclined Load Capacity of Suction Caissons”, International Journal for Numerical and Analytical Methods in Geomechanics, Vol.27, pp. 1235-1254. Auveny C.P., Han S., Murff J., (2003c). “Suction Caisson Capacity in Anisotropic Purely Cohesive Soil”, International Journal of Geomechanics, Vol.3, pp 225-235. Choi Y.J. (2007). “Reliability Assessment of Foundations for Offshore Mooring Systems under Extreme Environments”. Dissertation Presented to the Faculty of the Graduate School of The University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy. Ditlevsen O. y Madsen H.O., (1996), “Structural reliability methods”, John Wiley and Sons. DNV, (2005) “Geotechnical design and installation of suction anchors in clay”. Recommended Practice DNV-RP-E303, Det Norske Veritas. Faber M., Straub D., Heredia-Zavoni E. y Montes-Iturrizaga R., (2012) “Risk Assessment for Structural Design Criteria of FPSO Systems. Part I: Generic Models and Acceptance Criteria”, Marine Structures, 28, 120-133. Galambos T.V., Ellingwood B., Mac Gregor G. y Cornell A., (1982). “Probability based load criteria: assessment of current design practice”. ASCE Journal of Structural Division. 108. Gayton N., Mohamed A., Sorensen J.D., Pendola M. y Lemaire M. (2004), “Calibration methods for reliability-based design codes”, Structural Safety 26, 91–121. Gilbert R. B., Najjar S. S. y Choi Y. J., (2005). “Incorporating Lower-Bound Capacities into LRFD Codes for Pile Foundations”. GSP 131 Contemporary Issues in Foundation Engineering. Heredia-Zavoni E., Montes-Iturrizaga R., Faber M. y D. Straub, (2012), “Risk Assessment for Structural Design Criteria of FPSO Systems. Part II: Consequence Models and Applications to Determination of Target Reliabilities”, Marine Structures, 28, 50-66. Madsen H., Krenk S. y Lind N.C., (1986). “Methods of structural safety”, Englewood Cliffs, MJ: Prentice Hall Inc, 403 pp. Melchers R.E., Ahammed M., y Middleton C., (2003). “FORM for discontinuous and truncated probability density functions”. Structural Safety; 25:305–13. Montes-Iturrizaga R., Heredia-Zavoni E., Silva-González F. y Straub D., (2011). “Nested reliability analysis of mooring lines for floating systems”. Applied Ocean Research, 34, pp. 107-115. Montes-Iturrizaga R., Silva-González F., Heredia-Zavoni E., Inda-Sarmiento G., Straub D. y Faber M.H., (2009). “Análisis de Confiabilidad Estructural de Sistemas FPSO y su Aplicación en la Calibración de Factores de Seguridad para Criterios de Diseño Metoceánico”, Programa de Explotación de Campos en Aguas Profundas, IMP, Registro INDA No. 03-2009-092311423900-01. Neubecker S.R., y Randolph M.F., (1995). “Performance of embedded anchor chains and consequences for anchor design”. Proc. Offshore Technology Conference, Houston, Texas; OTC 7712; pp. 191-200. Nowak A.S. y Collins K.R., (1976). “Reliability of structures”. USA: McGraw Hill. Ravindra M.K. y Lind N.C. (1973). “Theory of Structural Code Optimization”, Journal of the Structural Division, Proceedings of ASCE, Vol. 99, No. ST7, July, 1973, pp.1541-1553.

15
Sociedad Mexicana de Ingeniería Estructural Rendón-Conde C., Heredia-Zavoni E. y Silva-González F., (2012). “Análisis de Riesgo de Falla de Pilotes de Succión”, Programa de Explotación de Campos en Aguas Profundas, IMP, Registro INDA pendiente. Silva-González F., Heredia-Zavoni E., Valle-Molina C., y Sánchez-Moreno J., (2010). “Análisis de Confiabilidad y Calibración de Factores de Seguridad”. Reporte Técnico Hito No. 5, Proyecto D.00703 Análisis de Riesgo y Confiabilidad para el Diseño de Pilotes de Succión de Sistemas Flotantes. Silva-González F., Heredia-Zavoni E., Valle-Molina C., y Sánchez-Moreno J., (2012a). “Análisis de Confiabilidad y Calibración de Factores de Seguridad para el Diseño de Pilotes de Succión”, Programa de Explotación de Campos en Aguas Profundas, IMP, Registro INDA pendiente. Silva-González F., Heredia-Zavoni E., y Montes-Iturrizaga R., (2012b). “Development of Environmental Contours using Nataf Distribution Model”, Ocean Engineering, en prensa. Silva-González F., Montes-Iturrizaga R., Heredia-Zavoni E. e Inda-Sarmiento G., (2009). “Caracterización de la Distribución de Probabilidad Conjunta de Variables Metoceánicas y Definición de Parámetros de Diseño de Sistemas Flotantes”, Programa de Explotación de Campos en Aguas Profundas, IMP, Registro INDA No. 03-2009-092311341900-01. Silva-González F., Heredia-Zavoni E., Sánchez-Moreno J., y Valle-Molina C., (2011). “Reporte de Prueba Tecnológica” Proyecto D.00703 “Análisis de Riesgo y Confiabilidad Estructural para el Diseño de Pilotes de Succión de Sistemas Flotantes”, Programa de Explotación de Campos en Aguas Profundas, IMP. Thoft-Christensen P. y Baker M.B. (1982). “Structural reliability theory and its applications”. Berlin: Springer.