Sociedad Mexicana de Ingeniería Estructural OBTENCIÓN … · También se incluyen algunos...
18
Sociedad Mexicana de Ingeniería Estructural Sociedad Mexicana de Ingeniería Estructural OBTENCIÓN DE LA RIGIDEZ ELÁSTICA DE BARRAS FORMADAS POR SEGMENTOS DE SECCIÓN VARIABLE NO COLINEALES. Monroy Miranda Fernando 1 , Rodríguez Vega Miguel Ángel 2 RESUMEN Se presenta la obtención de la matriz de flexibilidad de barras de sección variable formadas por segmentos no colineales mediante la aplicación de la matriz de transporte para fuerzas y desplazamientos, para la evaluación de los coeficientes de flexibilidad se recurre a la integración numérica. Como resultado de esta metodología se obtienen los coeficientes de rigidez, factores de transporte y momentos de empotramiento para este tipo de barras, este planteamiento permite considerar, por ejemplo, el efecto de “arco” en elementos estructurales de sección variable. Se hace una comparación de los resultados obtenidos al modelar barras de sección variable formadas por segmentos no colineales como vigas que cumplen con la teoría de Euler-Bernoullí, con respecto a soluciones presentadas por otros autores y también con las obtenidas utilizando elementos finitos. También se incluyen algunos ejemplos cuyos resultados, obtenidos con la metodología propuesta, son comparados con los proporcionados por la literatura especializada en el tema. Este trabajo demuestra que, junto con aplicación de las matrices de transporte y de la integración numérica, la teoría de Euller-Bernoullí permite modelar segmentos de barras de sección variable, obteniéndose las rigideces elásticas y momentos de empotramiento de barras formadas por segmentos de sección variable no colineales, proporcionando resultados comparables con los obtenidos a partir de formulaciones basadas, por ejemplo, en elementos finitos. ABSTRACT The obtaining of the flexibility matrix of variable section bars formed by non collinear segments is presented by means of the application of the transport matrix for forces and displacements, for flexibility coefficients evaluation it is appealed to the numeric integration. As a result of this methodology, rigidity coefficients, transport factors and fixed end moments are obtained for this kind of bars, this position allows to consider, for example, the "arch" effect in this type of structural elements. There is made a comparison of the results obtained by modeling bars of variable section formed by non collinear segments like beams that fulfill Euler-Bernoullí theory, with regard to solutions presented by other authors and also with those obtained using finite elements. There are also included some examples whose results, obtained with the proposed methodology, they are compared with the proportionate ones by the literature specialized in the topic. This work demonstrates that although the application of transport matrix and the numeric integration the Euller-Bernoullí theory allows modeling segments of variable section bars, the elastic rigidities and fixed end 1 Profesor de la Facultad de Ingeniería de la UNAM Departamento de Estructuras, División de Ingeniería Civil, Topográfica y Geodésica; Facultad de Ingeniería, Circuito Escolar, Cd. Universitaria, México, D. F., 04510 Tel.: (55) 5622-8002, email: [email protected] 2 Profesor de la Facultad de Ingeniería de la UNAM Departamento de Estructuras, División de Ingeniería Civil, Topográfica y Geodésica; Facultad de Ingeniería, Circuito Escolar, Cd. Universitaria, México, D. F., 04510 Tel.: (55) 5622-8002, email: [email protected] 1
-
Upload
hoangxuyen -
Category
Documents
-
view
219 -
download
2
Transcript of Sociedad Mexicana de Ingeniería Estructural OBTENCIÓN … · También se incluyen algunos...
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
OBTENCIÓN DE LA RIGIDEZ ELÁSTICA DE BARRAS FORMADAS POR SEGMENTOS DE
SECCIÓN VARIABLE NO COLINEALES.
Monroy Miranda Fernando 1 , Rodríguez Vega Miguel Ángel 2
RESUMEN Se presenta la obtención de la matriz de flexibilidad de barras de sección variable formadas por segmentos no colineales mediante la aplicación de la matriz de transporte para fuerzas y desplazamientos, para la evaluación de los coeficientes de flexibilidad se recurre a la integración numérica. Como resultado de esta metodología se obtienen los coeficientes de rigidez, factores de transporte y momentos de empotramiento para este tipo de barras, este planteamiento permite considerar, por ejemplo, el efecto de “arco” en elementos estructurales de sección variable. Se hace una comparación de los resultados obtenidos al modelar barras de sección variable formadas por segmentos no colineales como vigas que cumplen con la teoría de Euler-Bernoullí, con respecto a soluciones presentadas por otros autores y también con las obtenidas utilizando elementos finitos. También se incluyen algunos ejemplos cuyos resultados, obtenidos con la metodología propuesta, son comparados con los proporcionados por la literatura especializada en el tema. Este trabajo demuestra que, junto con aplicación de las matrices de transporte y de la integración numérica, la teoría de Euller-Bernoullí permite modelar segmentos de barras de sección variable, obteniéndose las rigideces elásticas y momentos de empotramiento de barras formadas por segmentos de sección variable no colineales, proporcionando resultados comparables con los obtenidos a partir de formulaciones basadas, por ejemplo, en elementos finitos.
ABSTRACT
The obtaining of the flexibility matrix of variable section bars formed by non collinear segments is presented by means of the application of the transport matrix for forces and displacements, for flexibility coefficients evaluation it is appealed to the numeric integration. As a result of this methodology, rigidity coefficients, transport factors and fixed end moments are obtained for this kind of bars, this position allows to consider, for example, the "arch" effect in this type of structural elements. There is made a comparison of the results obtained by modeling bars of variable section formed by non collinear segments like beams that fulfill Euler-Bernoullí theory, with regard to solutions presented by other authors and also with those obtained using finite elements. There are also included some examples whose results, obtained with the proposed methodology, they are compared with the proportionate ones by the literature specialized in the topic. This work demonstrates that although the application of transport matrix and the numeric integration the Euller-Bernoullí theory allows modeling segments of variable section bars, the elastic rigidities and fixed end
1 Profesor de la Facultad de Ingeniería de la UNAM Departamento de Estructuras, División de Ingeniería
Civil, Topográfica y Geodésica; Facultad de Ingeniería, Circuito Escolar, Cd. Universitaria, México, D. F., 04510 Tel.: (55) 5622-8002, email: [email protected]
2 Profesor de la Facultad de Ingeniería de la UNAM Departamento de Estructuras, División de Ingeniería Civil, Topográfica y Geodésica; Facultad de Ingeniería, Circuito Escolar, Cd. Universitaria, México, D. F., 04510 Tel.: (55) 5622-8002, email: [email protected]
1

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
moments of bars formed by non collinear variable section segments being obtained, providing results comparable with those obtained starting from based formulations, for example, in finite element analysis.
INTRODUCCIÓN Durante las últimas décadas, la ingeniería estructural, en su momento, ha utilizado métodos confiables de análisis elástico que han permitido modelar satisfactoriamente, cuando ha sido el caso, a los elementos de sección variable, de manera que, la determinación de elementos mecánicos, deformaciones y desplazamientos mediante los métodos propuestos por varios especialistas en el tema permiten diseñar adecuadamente a este tipo de elementos. En principio, varios son los autores que, durante el siglo pasado, desarrollaron varias ayudas de diseño, como las conocidas tablas publicadas por la Portland Cement Association (PCA, 1958), en donde se presentan constantes de rigideces, factores de transporte y momentos de empotramiento de elementos de sección variable (“Handbook”, 1958). Dadas las limitaciones propias de esa época con relación a efectuar cálculos extensivos, en las tablas de la PCA se hicieron varias hipótesis para simplificar el problema, mismas que, para ciertos casos, pueden llevar a errores significativos en la determinación de los factores de rigidez (Tena-Colunga, 1996), por lo que Tena (1996) propuso unas nuevas ayudas de diseño que pueden sustituir, en parte, a las anteriores tablas de la PCA. Una formulación rigurosa para elementos de sección variable con secciones transversales cajón e I, basada en la teoría clásica de vigas de Euler-Bernoulli para elementos bidimensionales sin incluir deformaciones axiales propuesta primeramente por Just (1977), fue producto de la evolución en el estudio de este tipo de problemas, Tena (2002) hace un resumen de las principales formulaciones que se han realizado en este sentido. Aunque se han propuesto varias alternativas de solución a este tipo de problemas, a la fecha, prácticamente, dos han sido las vertientes que más se han seguido para resolver problemas de análisis estructural elástico de barras de sección variable (Figura 1), la primera (siendo la más utilizada), por ejemplo, con fundamento en la teoría de Euler-Bernoullí ha permitido definir las matrices elásticas de rigidez en dos y tres dimensiones (Tena, 1996), la segunda, basada en una aplicación del método del elemento finito también ha sido propuesta (Yang y Yau, 1987, Rajase Karon, 1994).
Y
X
Z
X
Y
Z
x
h(x)h0
h=h(x)A=A(x)
Iy=Iy(x)Iz=Iz(x)
Acy=Acy(x)
Acz=Acz(x)
Jx=Jx(x)
Figura 1. Barra de sección transversal variable.
Tena (2002) reporta que, en esta segunda vertiente, Balkaya (2001) presentó un estudio paramétrico principalmente enfocado al comportamiento de trabes acarteladas de sección T utilizando elementos finitos tridimensionales en donde usó, como herramienta de cómputo, el programa SAP90. Como resultado de su estudio, Balkaya propuso un “modelo práctico” de trabes acarteladas para el análisis estructural de marcos, utilizando un elemento finito tipo viga de dos nodos, con base en un concepto de longitud efectiva definida a partir de pruebas de intento-error, Tena (2002) considera que, el “modelado práctico” de trabes acarteladas propuesto por Balkaya utilizando otro elemento finito tipo viga con “longitudes equivalentes” es poco afortunado y opinó que el “modelado práctico” de Balkaya es fruto de promover al método de los elementos finitos como la única solución analítica confiable para elementos de sección variable, además, siendo este un método poco práctico.
2
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
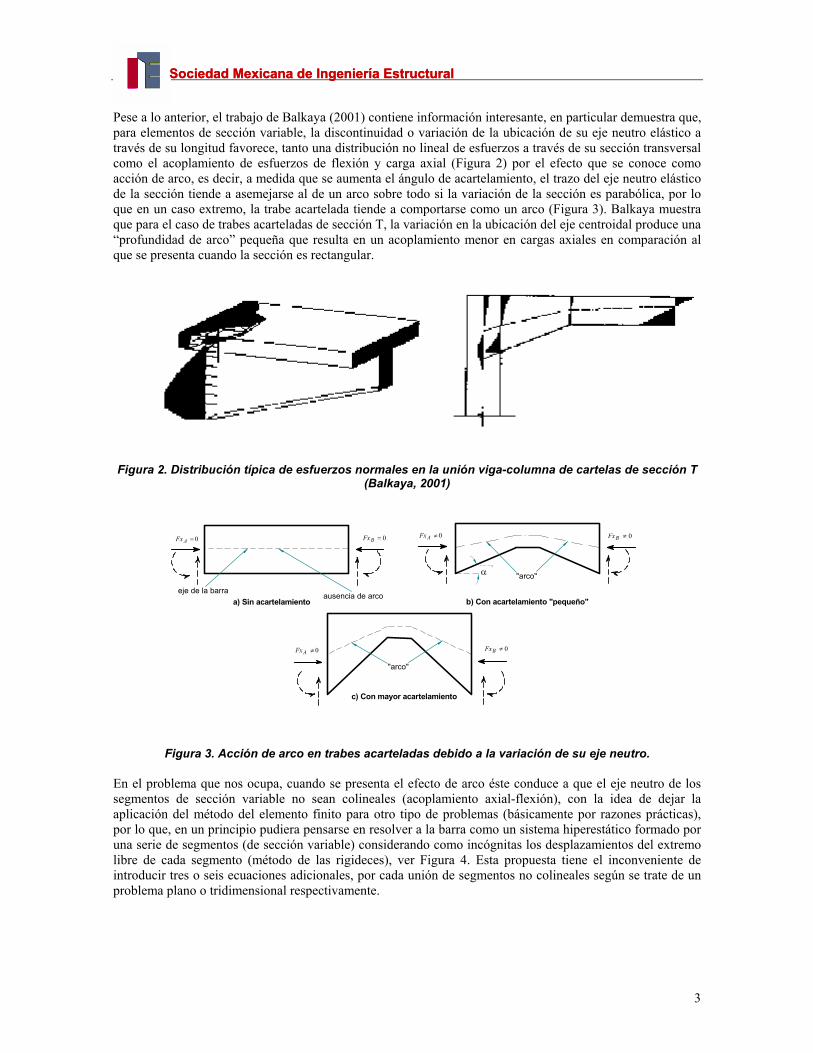
Pese a lo anterior, el trabajo de Balkaya (2001) contiene información interesante, en particular demuestra que, para elementos de sección variable, la discontinuidad o variación de la ubicación de su eje neutro elástico a través de su longitud favorece, tanto una distribución no lineal de esfuerzos a través de su sección transversal como el acoplamiento de esfuerzos de flexión y carga axial (Figura 2) por el efecto que se conoce como acción de arco, es decir, a medida que se aumenta el ángulo de acartelamiento, el trazo del eje neutro elástico de la sección tiende a asemejarse al de un arco sobre todo si la variación de la sección es parabólica, por lo que en un caso extremo, la trabe acartelada tiende a comportarse como un arco (Figura 3). Balkaya muestra que para el caso de trabes acarteladas de sección T, la variación en la ubicación del eje centroidal produce una “profundidad de arco” pequeña que resulta en un acoplamiento menor en cargas axiales en comparación al que se presenta cuando la sección es rectangular.
Figura 2. Distribución típica de esfuerzos normales en la unión viga-columna de cartelas de sección T (Balkaya, 2001)
"arco"
"arco"
ausencia de arco
0≠AFx 0≠BFx
0≠AFx 0≠BFx
0=AFx 0=BFx
eje de la barrab) Con acartelamiento "pequeño"
c) Con mayor acartelamiento
a) Sin acartelamiento
23,6° α
Figura 3. Acción de arco en trabes acarteladas debido a la variación de su eje neutro. En el problema que nos ocupa, cuando se presenta el efecto de arco éste conduce a que el eje neutro de los segmentos de sección variable no sean colineales (acoplamiento axial-flexión), con la idea de dejar la aplicación del método del elemento finito para otro tipo de problemas (básicamente por razones prácticas), por lo que, en un principio pudiera pensarse en resolver a la barra como un sistema hiperestático formado por una serie de segmentos (de sección variable) considerando como incógnitas los desplazamientos del extremo libre de cada segmento (método de las rigideces), ver Figura 4. Esta propuesta tiene el inconveniente de introducir tres o seis ecuaciones adicionales, por cada unión de segmentos no colineales según se trate de un problema plano o tridimensional respectivamente.
3

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
1
2
i
{d 1} = ?{d 2} = ?
{d i} = ?
Figura 4. Discretización de una barra en segmentos de sección variable.
Una propuesta que elimina el inconveniente de la anterior es obtener la matriz de rigidez de toda la barra la cual, por ejemplo, puede conseguirse a partir de su matriz de flexibilidad, esta última puede obtenerse de la matriz de flexibilidad de cada segmento y, desde luego, considerar la variación de las propiedades geométricas y elásticas de cada segmento y la posibilidad de que su eje centroidal pudiera ser no colineal. La submatriz de flexibilidad en un extremo de toda la barra puede ser obtenida mediante el transporte de desplazamientos (flexibilidades) de cada segmento al extremo de la barra, invirtiéndola se obtiene la submatriz de rigidez de ese extremo y, por ejemplo, transportando estas fuerzas (rigideces) al otro extremo de la barra se obtienen las demás submatrices para así completar la matriz de rigidez de toda la barra. Una manera cómoda de realizar esos transportes, tanto de fuerzas como de desplazamientos, es mediante las matrices de transporte.
MATRICES DE TRASLACIÓN O DE TRANSPORTE DE FUERZAS Como sabemos, fuerzas y desplazamientos pueden ser trasladados de un punto a otro usando matrices de transporte o de translación. Para ello, consideremos un conjunto de acciones en el punto A (Figura 5.a) mediante la adición de un conjunto de acciones iguales, opuestas y no colineales en 0 y A se obtiene un conjunto de acciones estáticamente equivalentes en 0 (Figura 5.b), como sabemos, existe una relación entre las acciones en A y 0.
X
Y
Z
0
),( AA yxA0xxu A −=AxF
0yyv A −=AzM
AyF
0xF
AMz
AxF
0Mz
AyF
AxF−
AyF−
AzM−
Y
Z
X
0yF
A
0
a) Acciones en A b) Acciones estáticamente equivalentes en 0, acciones nulas en A
Figura 5. Transporte de fuerzas.
Con relación a la Figura 5.b se tiene que:
4

Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
)()( 000 xxFyyyFxMzMz AAAAA −+−−= (1)
AFxFx =0 (2)
AFyFy =0 (3) Las ecuaciones (1) a (3) se pueden representar matricialmente de la siguiente manera
(4)
−−−=
A
A
A
AA MzFyFx
xxyyMzFyFx
1)()(010001
000
0
0
Es decir
{F0} = [TFA0] {FA} (5)
{FA} = [TF0A] {F0} (6)
[TF0A] = [TFA0]-1 (7)
MATRIZ DE TRANSPORTE O DE TRASLACIÓN DE DESPLAZAMIENTOS Ahora consideremos un conjunto de desplazamientos en el punto A (Figura 6.a) de la barra rígida A0, si no ocurre rotación, una traslación en A causa idéntica traslación en 0. El efecto de la rotación θ2 se muestra en la Figura 6.b.
X
Y
Z
),(0 00 yx
Ay∆
Ax∆
),( AA yxA
Azθ
X
Y
Azvx θ=∆
Azuy θ−=∆
Azθ
Au
v
0
a) Desplazamiento del punto A b) Efecto de θzA
Figura 6. Transporte de desplazamientos.
Nuevamente, pero ahora con relación a la Figura 6.b tenemos que:
AA zxxy θ−−=∆ )( 0 (8)
5

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
AA zyyx θ−=∆ )( 0 (9)
AAAA zyyxxxx θ−+∆=∆+∆=∆ )( 00 (10)
AAAA zxxyyyy θ−−∆=∆+∆=∆ )( 00 (11)
Azz θ=θ 0 (12)
En forma matricial se tiene
θ∆∆
−−
−=
θ∆∆
A
A
A
A
A
zyx
xxyy
zyx
100)(10
)(01
0
0
0
0
0 (13)
{D0} = [TDA0] {DA} (14)
MATRIZ [fBB] DE BARRAS EN SERIE (SEGMENTOS DE SECCIÓN VARIABLE)
Para la barra formada por segmentos de eje recto (de sección constante o no) no colineales (Figura 7) la submatriz de flexibilidad del extremo B ([fBB]) puede obtenerse a partir de la submatriz de flexibilidad de cada segmento (referida a su sistema coordenado local) transformada al sistema global de toda la barra y transportada al extremo B de ésta (Figura 8), lo anterior conduce a la expresión (15) obtenida por Damy† (1981).
1
'iY '
iX'2Y
'2X
'iY
'iX
i
n
Sistema coordenado global
nY
nX
Sistemas coordenados locales
Y
X
2
A
B
Figura 7. Barra formada por segmentos de eje recto no colineales.
[ ] [ ] [ ] [∑=
=n
iBiiBB
TBiBB HfHf
1
] (15)
De cada barra se conoce [f’BB]i (referida a su sistema local), también se conoce la matriz de transformación. Para una barra en 2D es ampliamente conocido que, la matriz de transformación está definida por la ecuación (16) cuyos elementos se representan en la Figura 9, de tal manera que, la transformación de [f’BB]i a globales se realiza aplicando la expresión (17).
6

Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
[ ]11BBf
= [ ] ?=BBf
+ Rígidos
+
[ ]2BBf
Rígidos
Figura 8. Representación esquemática para obtener [fBB].
B
'X
i
iθ
Y
X
Sistema local
Sistema global
'Y
A
L
),( AA YX
AB XX −
),( BB YXL
XXCos ABi
−=θ
LYYSen AB
i−
=θAY−BY
Figura 9. Elementos de la matriz de transformación para una barra en 2D.
[ ]
−=
10000
ii
ii
i cossensencos
T θθθθ
(16)
[fBB]i = [ ]T
iT [f’BB]i [T]i (17)
MATRIZ DE FLEXIBILIDAD DE UNA BARRA BIDIMENSIONAL DE SECCIÓN VARIABLE
Desde hace ya varios años, Damy† (1982), basándose en la teoría clásica de vigas, aplicó el método de las flexibilidades para la obtención de los coeficientes de flexibilidad de elementos de sección variable, Tena (1997) hizo una presentación completa del método, una parte de sus resultados se muestran en la Figura 10 que contiene, además, el significado de algunos términos de la matriz de flexibilidad para elementos barra bidimensionales. Las expresiones (18) a (22) permiten calcular esos términos, por lo que la submatriz de flexibilidades [f] queda expresada como:
7

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
y
x x
y
Fx
a) Fx = 1 b) Fy = 1
x
y
c) Mz = 1
1 2
FY
MZ
1 2
0f23
0°f33
1 L0
0f22
1°f32
L0 L
0f11
1 2
Figura 10. Términos de la matriz de flexibilidad de una barra bidimensional
[ ]
=
3332
2322
11
00
00
ffff
ff (18)
( )xEAdxf
L
∫=0
11 (19)
( ) ( )xGAdx
xEIdxxLf
cy
L
z
L
∫∫ +−
=0
2
022
)( (20)
( ) 320
23)( fxEIdxxLf
z
L=
−=∫ (21)
( )xEIdxfz
L
∫=0
33 (22)
En las expresiones anteriores, como se sabe, E y G son, respectivamente, el módulo de elasticidad y el de rigidez a cortante del material; A(x), Iz(x) y Acy(x) son funciones que representan la variación del área, momento de inercia y área de cortante de la sección transversal de la barra con respecto a su eje, una manera de evaluar los términos de la matriz [f] (ecuaciones 19 a 21), sobre todo cuando las propiedades geométricas de la barra son variables, es mediante integración numérica (Monroy 2002).
Una vez obtenida [fBB], la inverza de esta submatriz resulta ser la submatriz de rigidez del extremo B de toda la barra ([kBB]), una manera de completar la matriz de rigidez de toda la barra es utilizar a la matriz de transporte de fuerzas (mencionada con anterioridad), para ello consideremos la barra en cuyos extremos A y B se encuentran actuando las fuerzas indicadas en la Figura 11, por equilibrio tenemos que:
0'';0' =+=Σ BA FxFxxF
0'';0' =+=Σ BA FyFyyF
0';0 =++=Σ BABA MMLFyM
Expresando las ecuaciones anteriores en forma matricial quedan de la siguiente manera.
8

x′BxF ′
ByF ′
BM
BAAyF ′
AM
AxF ′
0 L
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Figura 11. Fuerzas actuando en los extremos de una barra en 3D
0''
10010001
''
=
+
B
B
B
A
A
A
MFyFx
LMFyFx
{F’A} + [H’BA] {F’B} = 0 (23)
En la ecuación anterior, [H’BA] es la matriz de transporte de B a A. De manera similar, el equilibrio del nudo B conduce a
[H’BA] {F’A} + {F’B}= 0 (24) Las fuerzas y los desplazamientos, ambos de los extremos de la barra, están relacionados mediante
=
'
'
''
''
'
'
B
A
BBBA
ABAA
B
Add
kkkk
FF
desarrollando la ecuación anterior y sustituyendo en la ecuación 24 se tiene que:
0 = [ [k’AA] + [H’BA] [k’BA] ] {d’A} + [ [k’AB] + [H’BA] [k’BB] ] {d’B} la igualdad anterior debe de ser válida para cualquier {d’A} y {d’B} por lo que
[k’AA] = − [H’BA] [k’BA] (25) [k’AB] = − [H’BA] [k’BB] (26)
sabemos que [k’BA] = [k’AB]T , por lo que, sustituyendo (26) en la ecuación anterior y realizando la transpuesta obtenemos
[k’BA] = − [k’BB] [H’BA]T (27)
Observando las ecuaciones 25 a la 27 concluimos que únicamente se requieren [k’BB] y [H’BA] para obtener a la matriz [k’], el razonamiento anterior también es válido para rigideces referidas al sistema global pero utilizando la matriz de transporte definida por la ecuación (4).
DESARROLLO DEL PROGRAMA La aplicación del procedimiento presentado en párrafos anteriores requiere, para fines prácticos, del uso de la computadora, por lo que, como parte de este trabajo, y a partir del programa SECVAR5 (Monroy 2002) el
9

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
cual realiza la integración numérica para la obtención de los coeficientes de flexibilidad y momentos de empotramiento de una barra de eje recto de sección variable, se desarrolló el programa BARSER2 que realiza el transporte, al extremo de la barra, de las flexibilidades y desplazamientos (debidos a las fuerzas externas) de cada segmento, para obtener la submatriz de flexibilidad total de la barra y a partir de esta las submatrices [kBB], [kBA] y [kAA] así como las fuerzas en los extremos de la barra (reacciones) producidas por las fuerzas externas. Para realizar lo anterior BARSER2 utiliza respectivamente las correspondientes matrices de transporte de fuerzas y desplazamientos mostradas en párrafos anteriores, BARSER2 incluye la posibilidad de manejar a la barra formada por una serie de segmentos no colineales (Figura 12) y para cada uno de ellos con diferente forma de su sección transversal, el programa BARSER2 acepta segmentos de sección transversal: “I”, “T”, rectangular, trapecial, circular, rectangular hueca, trapecial hueca y circular hueca (Figura 13); con ancho y peralte constante o con variación lineal o parabólica entre sus extremos.
X
Y
Zx
h(x)
segmentos no colineales
lineal
constante
parábola
0 h
Figura 12. Barra de sección variable formada por una serie de segmentos no colineales.
Por cuestiones de espacio, el listado del programa BARSER2 no se incluyó en este documento, sin embargo, se puede solicitar en el Departamento de Estructuras de la DICTyG de la Facultad de Ingeniería de la UNAM o a la dirección electrónica [email protected] en donde también, apreciable lector, nos puede enviar sus comentarios y sugerencias al respecto los cuales agradecemos anticipadamente.
Bi
H
Bi=0
H
t=0
ts
Bs
Bs
H
Bs=0 Bi=0 t=0
H
Bi=0
Bs
t
ts
ts
ts
Bs
H
Bi=0 ts=0 t=0
H
Bs=0 Bi=0 ts=0 t=0
t
Bi
H
ts=0 t=0
Bs
ts
ts
Bi
H
Bs
t
ts
ts
Figura 13. Formas para la sección transversal de una barra de sección variable, programa BARSER2.
10

Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
EJEMPLOS
Tena (2002) hace una comparación de los resultados presentados por Balkaya (2001) quien estudió, utilizando elementos finitos, cómo afecta a los factores de rigidez y momentos de empotramiento el incremento de la profundidad de acartelamiento en trabes simétricas de sección T, con los obtenidos a partir de la teoría de Bernoulli-Euler para trabes acarteladas presentada por Tena-Colunga (1996), también presentan los resultados del análisis de un marco de una crujía con trabe acartelada de sección T utilizando elementos finitos en 3D, los cuales, como menciona Tena (2002) son muy valiosos para poder hacer comparaciones utilizando métodos que se basan en la teoría clásica de vigas, métodos energéticos y/o el cálculo de variaciones y, desde luego, con el método presentado en este trabajo. Con lo anterior en mente, a continuación se presentan una serie de ejemplos cuyos resultados, provenientes de la aplicación de la metodología aquí presentada implementada en el programa BARSER2, se comparan con los correspondientes proporcionados por otros autores.
EJEMPLO 1, MARCO CON BARRAS DE SECCIÓN VARIABLE Se presenta el marco mostrado en la Figura 14 (Leontovich 1982), el análisis estructural fue realizado con el procedimiento propuesto en este trabajo, es decir se consideró al marco como formado por una serie de cinco segmentos de eje recto (dos de ellos no colineales) de sección variable (Figura 15), también se utilizó al programa SAP2000 y los resultados de ambas herramientas se muestran en la tabla 1 junto con los que presenta la referencia antes citada.
199,86
40
99,98
59,98
1
1:4
20 pies
2 k / pie
20 pies
8 pies 12 pies
ancho = 1.5 pies 1:1
0
40 pies10 2 pies
1 3 pies
X
Y
Figura 14. Geometría del marco del ejemplo 1 (Ejemplo 13-3 Leontovich 1982)
11

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
A
1 6
4
B
2
2
1
X
Y5
3
5
3 4
X
Y
X
Y
Figura 15. Número de segmentos de sección variable para el ejemplo 1
Tabla 1. Algunos resultados del ejemplo 1.
Reacciones en el apoyo B Herramienta
o procedimiento Horizontal (kip) Vertical (kip) Momento (kip-pie) Leontovich 16.39 40 75.08
Barras en Serie 15.96 40 69.84 SAP 2000 (barra) 15.96 40 69.84
Como puede verse los resultados proporcionados por SAP2000 (con elementos barra de sección variable) y el procedimiento de barras en serie son idénticos, no así con los presentados por Leontovich (1982), el autor sospecha que la diferencia se puede deber al hecho de que en la referencia citada no se consideraron deformaciones por fuerza axial ni por fuerza cortante (solo por flexión).
EJEMPLO 2, VIGA DE SECCIÓN VARIABLE DE EJE RECTO Se aplica a la viga que se muestra en la Figura 16 el procedimiento de discretizarla en una serie de segmentos rectos colineales de sección variable.
Y
XZ
M1z M2z
F1y F2y5 m 5 m 2.5 m
h=1.2m
h=0.8m h=0.6m
2 Ton/m1 Ton/m 1 Ton/m
5 Ton
10 Ton
t=2.5 cm
50 cm
h=variable
Sección transversal
E=20,390,000 Ton/m2
υ
lineal
=0.3
12
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
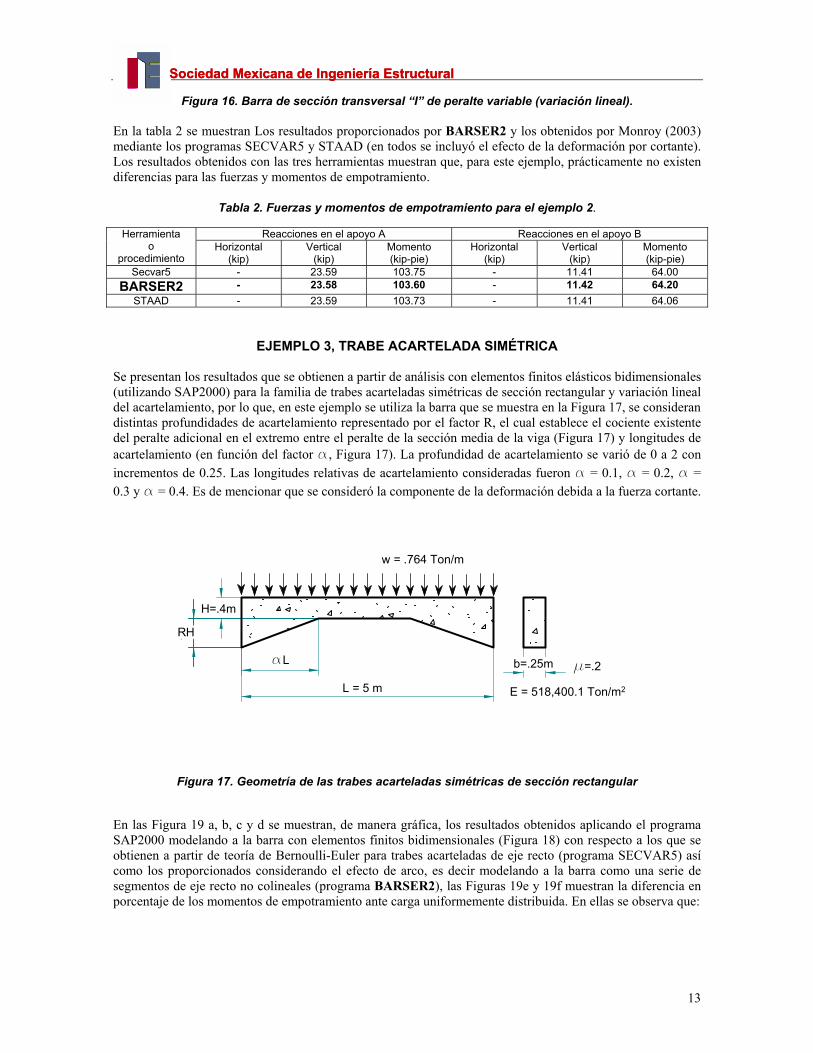
Figura 16. Barra de sección transversal “I” de peralte variable (variación lineal). En la tabla 2 se muestran Los resultados proporcionados por BARSER2 y los obtenidos por Monroy (2003) mediante los programas SECVAR5 y STAAD (en todos se incluyó el efecto de la deformación por cortante). Los resultados obtenidos con las tres herramientas muestran que, para este ejemplo, prácticamente no existen diferencias para las fuerzas y momentos de empotramiento.
Tabla 2. Fuerzas y momentos de empotramiento para el ejemplo 2.
Reacciones en el apoyo A Reacciones en el apoyo B Herramienta o
procedimiento Horizontal
(kip) Vertical
(kip) Momento (kip-pie)
Horizontal (kip)
Vertical (kip)
Momento (kip-pie)
Secvar5 - 23.59 103.75 - 11.41 64.00 BARSER2 - 23.58 103.60 - 11.42 64.20
STAAD - 23.59 103.73 - 11.41 64.06
EJEMPLO 3, TRABE ACARTELADA SIMÉTRICA
Se presentan los resultados que se obtienen a partir de análisis con elementos finitos elásticos bidimensionales (utilizando SAP2000) para la familia de trabes acarteladas simétricas de sección rectangular y variación lineal del acartelamiento, por lo que, en este ejemplo se utiliza la barra que se muestra en la Figura 17, se consideran distintas profundidades de acartelamiento representado por el factor R, el cual establece el cociente existente del peralte adicional en el extremo entre el peralte de la sección media de la viga (Figura 17) y longitudes de acartelamiento (en función del factor a, Figura 17). La profundidad de acartelamiento se varió de 0 a 2 con incrementos de 0.25. Las longitudes relativas de acartelamiento consideradas fueron a = 0.1, a = 0.2, a = 0.3 y a = 0.4. Es de mencionar que se consideró la componente de la deformación debida a la fuerza cortante.
0
w = .764 Ton/m
10RH
0
2
0
E = 518,400.1 Ton/m
b=.25maL
L = 5 m
m=.2
0H=.4m
Figura 17. Geometría de las trabes acarteladas simétricas de sección rectangular
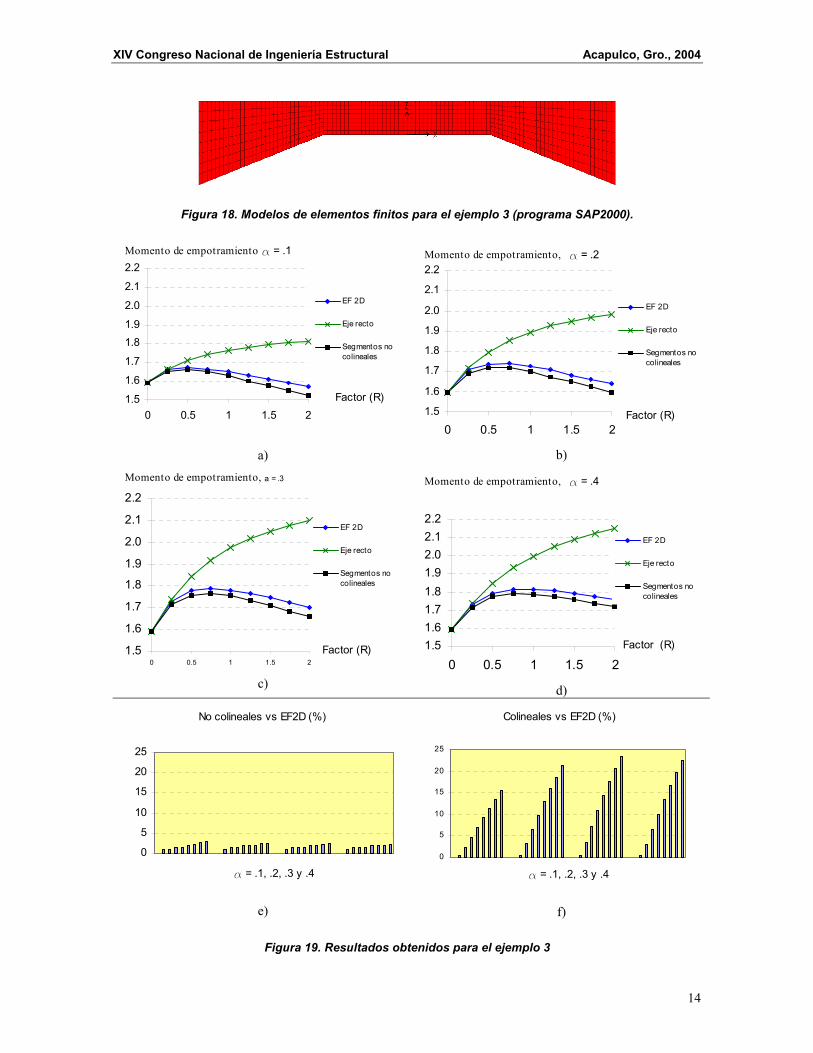
En las Figura 19 a, b, c y d se muestran, de manera gráfica, los resultados obtenidos aplicando el programa SAP2000 modelando a la barra con elementos finitos bidimensionales (Figura 18) con respecto a los que se obtienen a partir de teoría de Bernoulli-Euler para trabes acarteladas de eje recto (programa SECVAR5) así como los proporcionados considerando el efecto de arco, es decir modelando a la barra como una serie de segmentos de eje recto no colineales (programa BARSER2), las Figuras 19e y 19f muestran la diferencia en porcentaje de los momentos de empotramiento ante carga uniformemente distribuida. En ellas se observa que:
13
XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
Figura 18. Modelos de elementos finitos para el ejemplo 3 (programa SAP2000).
Momento de empotramiento a = .1
1.5
1.6
1.7
1.81.9
2.0
2.1
2.2
0 0.5 1 1.5 2Factor (R)
EF 2D
Eje recto
Segmentos nocolineales
a)
Momento de empotramiento, a = .2
1.5
1.6
1.7
1.8
1.9
2.0
2.1
2.2
0 0.5 1 1.5 2Factor (R)
EF 2D
Eje recto
Segmentos nocolineales
b) Momento de empotramiento, a = .3
1.5
1.6
1.7
1.8
1.9
2.0
2.1
2.2
0 0.5 1 1.5 2Factor (R)
EF 2D
Eje recto
Segmentos nocolineales
c)
Momento de empotramiento, a = .4
1.51.61.71.81.92.02.12.2
0 0.5 1 1.5 2Factor (R)
EF 2D
Eje recto
Segmentos nocolineales
d)
No colineales vs EF2D (%)
0
5
10
15
20
25
a = .1, .2, .3 y .4
e)
Colineales vs EF2D (%)
0
5
10
15
20
25
a = .1, .2, .3 y .4
f)
Figura 19. Resultados obtenidos para el ejemplo 3
14

Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
1. Para valores de R mayores que la unidad, existe una diferencia notable entre el modelo de barra de
eje recto y los modelos de EF2D y de segmentos no colineales, los resultados de estos dos últimos coinciden satisfactoriamente.
2. Los momentos de empotramiento se incrementan a medida que la longitud relativa de
acartelamiento (a) aumenta, por lo que en ese aspecto el procedimientos de segmentos no colineales y el de EF2D coinciden, ese incremento se presenta hasta valores de a cercanos a .7 (o 1 aproximadamente) y descienden a medida que aumenta la profundidad de acartelamiento R, sin embargo, bajo el modelado como viga de eje recto ese incremento continua.
3. Por otra parte, se observa que los resultados presentados por el modelo de barra de eje recto con
respecto al de EF2D presenta diferencias de alrededor del 5% para R menor o igual a .75 y del 10% al 15% para R menor o igual a 1.5.
EJEMPLO 4, MARCO DE UNA CRUJÍA CON TRABE ACARTELADA Ahora se compararan los elementos mecánicos que presenta el marco de una crujía con trabe acartelada simétrica mostrado en la Figura 20 (Balkaya, 2001), utilizando elementos finitos bidimensionales mediante el programa SAP2000 (Figura 21), con los que se obtienen a partir de un análisis plano modelando al marco como una serie de segmentos no colineales de sección variable mediante el programa BARSER2 y también con los de la referencia antes citada (elementos finitos sólidos, Balkaya 2001).
0
0
1.25
m= 0.2
0
0
0.8
0.4
0 0.12
0 0.25
0
2.5
0 0.50 1.0
0
0
1.5
segmentos rígidos (nudo)
1.5
0.764 Ton/m
eje de simetría segmentos no colineales
Unidades en m.
1.5
Figura 20. Marco del ejemplo 4.
15

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
Figura 21. Modelo de elementos finitos bidimensionales (SAP2000). Como apunta Tena (2002), independientemente del tipo de viga, existe cierta incertidumbre con respecto al modelado de la conexión viga-columna, por lo que es difícil decidir qué proporción de la unión viga-columna debe considerarse como zona rígida para fines de análisis. En este sentido, aunque poco práctico para el análisis de edificios, el modelado con elementos finitos tridimensionales (3DFEM) es más apropiado. Por lo anterior, en este ejemplo se utilizaron elementos finitos bidimensionales los cuales implican mucho menor esfuerzo en las etapas de preproceso (preparación del modelo) y postproceso (interpretación de resultados) para un usuario con las herramientas de análisis comunes hoy en día. Para el modelado de la unión viga-columna (nudo) se consideraron tres hipótesis diferentes sobre la rigidez de la unión viga-columna: 100% efectiva (nudo rígido), 50% efectiva y 0% efectiva (nudo flexible). Para el marco mostrado en la Figura 20, en la tabla 3 se muestran los elementos mecánicos calculados con las diferentes herramientas, también se indican los calculados por Balkaya (elementos finitos sólidos). Se observa que la aproximación del modelo de segmentos no colineales cuando se considera que la unión viga-columna es 50% efectiva, con el modelo de elementos finitos (EF3D) es bastante aceptable ya que las diferencias son menores al 8%, para este ejemplo el modelo propuesto por Balkaya (elemento de dos nodos de longitud equvalente) alcanza diferencias de más del 10% aproximadamente. También se observa que los resultados del modelo de EF2D son muy parecidos a los del modelo EF3D (las diferencias no rebasan el 6% aproximadamente).
Tabla 3. Elementos mecánicos en la trabe acartelada y columnas Modelo Zona
rígida Elementos mecánicos en la viga Elementos mecánicos en columnas
en el nudo
Cara de la cartela Centro del claro
Cara superior de la columna Base
Momento Axial Cortante Momento Momento Cortante Axial Momento (t-m) (t) (t) (t-m) (t-m) (t) (t) (t-m) EF3D 1.220 0.914 1.914 1.016 1.372 0.913 2.100 0.914 EF2D 1.337 0.864 1.910 0.989 1.298 0.864 2.101 0.866 No colineales
100% 1.404 0.916 1.910 0.848 1.422 0.916 2.101 0.868
No colineales
50% 1.253 0.858 1.910 1.008 1.301 0.858 2.101 0.844
No colineales
0% 1.125 0.809 1.910 1.142 1.200 0.809 2.101 0.823
16

Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
COMENTARIOS FINALES
Se presentó la aplicación de las matrices de transporte como una opción para la evaluación de los elementos de las matrices de rigidez elásticas bidimensionales así como de las fuerzas y momentos de empotramiento, todos ellos, para barras de sección transversal variable formadas por segmentos colineales y no colineales, este procedimiento permite tomar en cuenta el acoplamiento fuerza axial-momento flexionante y considerar el efecto de “arco”. El artículo hace una comparación de los resultados que se obtienen al modelar a las trabes acarteladas de sección “I”, rectangulares y “T” como vigas que cumplen con la teoría de Bernoulli-Euler, con respecto a soluciones obtenidas con elementos finitos utilizando herramientas de uso común en la práctica. Se compararon los elementos mecánicos de varias estructuras simples con trabe acartelada y columnas de sección variable sujetas a carga uniformemente distribuida principalmente (ellos fueron obtenidos mediante un análisis con elementos finitos planos), con respecto al que se obtiene modelando a todos los elementos (colineales o no) conforme a la teoría de Bernoulli-Euler. De la comparación de los resultados obtenidos para el marco de referencia, uno puede concluir que una alternativa para el modelado de trabes acarteladas que forman parte de marcos es utilizar elementos de sección variable no colineales. Para aplicaciones prácticas, la implementación de la metodología propuesta condujo a la elaboración del programa de computadora VARSER2, con características de sencillez y flexibilidad, ya que le permite al usuario la posibilidad de manejar barras constituidas por una serie de segmentos no colineales con diferentes formas de su sección transversal, especificando como datos las dimensiones características según la forma de la sección, también es posible decidir si se incluirá o no la deformación por cortante así como indicar el número de puntos a considerar en el proceso de integración numérica y, además, la posibilidad de considerar el efecto de nudo rígido.
El programa VARSER2 se aplicó a varios ejemplos (algunos de los cuales se incluyeron en este reporte), la comparación entre sí de los resultados proporcionados por otras herramientas y textos relacionados con el tema, resultó ser bastante satisfactoria. Las diferencias encontradas se deben (como anotan acertadamente varios autores), al efecto de la deformación por cortante dependiente de la relación peralte claro y de la forma de la sección transversal de la barra, al efecto de arco y a la distribución no lineal de esfuerzos producido por éste en cierto tipo de secciones. Por lo anterior VARSER2 constituye una alternativa moderna para la solución de este tipo de problemas. Por sencillez, el programa VARSER2 se desarrolló en una versión de BASIC, pero con poco esfuerzo, todo o una parte del mismo, puede ser traducido a otro lenguaje (si es necesario), y/o hacerle las modificaciones convenientes para incorporarlo a algún programa de Análisis Estructural, con lo que se tendrá la posibilidad de resolver estructuras con barras de sección transversal variable formadas por segmentos no colineales como una opción más dentro del mismo programa. Finalmente, el autor considera que, el procedimiento analítico presentado resultó muy confiable para el modelado elástico de barras con elementos de sección variable no colineales, por lo que puede ser utilizado para fines prácticos para estructuras similares a las aquí presentadas.
REFERENCIAS
Balkaya C. (2001), “Behavior and modeling of nonprismatic members having T sections”, ASCE Journal of Structural Engineering, 127 (8), pp. 940-946. Damy R. (1982), “Notas de la clase Análisis Estructural”, Facultad de Ingeniería UNAM, México.
17

XIV Congreso Nacional de Ingeniería Estructural Acapulco, Gro., 2004
Damy R. (1984), “Notas de la clase Aplicación de las Computadoras al Análisis Estructural y Teoría General de las Estructuras”, División de Estudios de Postgrado, Facultad de Ingeniería UNAM, México. El-Mezaini N., Balkaya C. y Çitipitioglu E. (1991), “Analysis of frames with nonprismatic members”, ASCE Journal of Structural Engineering, 117 (6), pp. 1573-1592. “Handbook of Frame Constants, Beam Factors and Moment Coeficients for Members of Variable Section”, (1958), Portland Cement Association. Just D. J. (1977), “Plane frameworks of tapering box and I-section”, ASCE Journal of Structural Engineering, 103 (1), pp. 71-86. Monroy F. (2003), “Aplicación de la integración numérica a la obtención de la rigidez elástica de elementos de sección variable”, Revista Ingeniería, Investigación y Tecnología, Facultad de Ingeniería UNAM, Volumen IV, Número 1 enero-marzo de 2003. “QUICK-BASIC”, versiones 2.0, 4.0 y 4.5 Microsoft Corp. 1984 a 1989. Rajasekaran S. (1994), “Equations for tapered thin-walled beams of generic open section”, ASCE Journal of Engineering Mechanics, 120 (8), pp. 1607-1629. “SAP 2000, Structural Analysis Program”, versiones 7.40 y 8.28, Computers and Structures, Inc. Berkeley, California U.S.A., 1996-2004.
“STAAD, Structural Analysis and Design Program”, versiones 22(III) y 2003(Pro) Research Engineers, Inc. Yorba Linda CA, U.S.A., 1990-2000.
Tena-Colunga A. (1996), “Stiffness formulation for nonprismatic beam elements”, ASCE Journal of Structural Engineering, 122 (12), pp. 1484-1489. Tena A. (1997), “Rigidez Elástica de elementos de sección variable”, Revista Ingeniería, Facultad de Ingeniería UNAM, Volumen LXVI, Número 2 Abril-Junio de 1997. Tena A. (2002), “Modelado Elástico de Trabes acarteladas de Sección T”, XIII Congreso Nacional de Ingeniería Estructural, Puebla, Pue., México. Tena-Colunga A. y Zaldo A. (1994), “Formulación Elástica de la Rigidez de Elementos de Sección Variable”, IX Congreso Nacional de Ingeniería Estructural, Zacatecas, Zac., México. Valerian L. (1981), “Pórticos y Arcos, Soluciones Condensadas para el Análisis Estructural”, CECSA, México. Yang Y-B. y Yau J-D. (1987), “Stability of beams with tapered I-sections”, ASCE Journal of Engineering Mechanics, 113 (9), pp. 1337-1357.
18