Sistema de seguridad para personas dependientes
145
i Proyecto Fin de Carrera Ingeniería de Telecomunicación Sistema de seguridad para personas dependientes Autor: Rodrigo Pajares Barroso Tutor: Alfredo Pérez Vega-Leal Dep. Ingeniería Electrónica Escuela Técnica Superior de Ingeniería Universidad de Sevilla Sevilla, 2016
Transcript of Sistema de seguridad para personas dependientes

i
Proyecto Fin de Carrera
Ingeniería de Telecomunicación
Sistema de seguridad para personas dependientes
Autor: Rodrigo Pajares Barroso
Tutor: Alfredo Pérez Vega-Leal
Dep. Ingeniería Electrónica
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2016


iii
Proyecto Fin de Carrera
Ingeniería de Telecomunicación
Sistema de seguridad para personas dependientes
Autor:
Rodrigo Pajares Barroso
Tutor:
Alfredo Pérez Vega-Leal
Profesor titular
Dep. Ingeniería Electrónica
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2016


v
Proyecto Fin de Carrera: Sistema de seguridad para personas dependientes
Autor: Rodrigo Pajares Barroso
Tutor: Alfredo Pérez Vega-Leal
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2016
El Secretario del Tribunal


vii
A mi familia, y en especial a mis
padres.


ix
Agradecimientos
A mis padres, a mis abuelos por ser una inspiración continua, a toda mi familia por estar siempre conmigo, en
los buenos y en los malos momentos, a lo largo de esta etapa de mi vida y a todos mis amigos, compañeros y
profesores que me han ayudado a cerrar con éxito este ciclo de mi formación.


xi
Resumen
El proyecto se basa en el diseño e implementación de un sistema de asistencia para personas con problemas de
salud, con necesidades especiales o de una avanza edad. Con el fin de alcanzar este objetivo, se ha
implementado un sistema que tiene como pieza central una placa Arduino Uno Rev3, y esta obtiene distintos
datos de los distintos módulos que forman el sistema. Con esos datos se pone en funcionamiento un sistema
que tiene capacidad para detectar caídas, establecer zonas de seguridad, recoger llamadas del pulsador de
emergencia y tener un contacto continuo en el tiempo a través de la red GSM.
Tras un análisis previo de los distintos microcontroladores del mercado, se optó por Arduino. Esta elección se
llevó a cabo por el interés que tenía conocer estos microcontroladores, que además de ser de software libre
tienen la ventaja de que existe gran cantidad de información en torno a estas placas.
El sistema implementa las funciones anteriormente descritas a través de los distintos módulos que lo forman,
GSM, GPS e IMU. Se diseñan las comunicaciones con estos módulos, y tras esto, se adquieren datos que son
tratados a través de distintos algoritmos por el microprocesador. Finalmente estos algoritmos son
implementados por un algoritmo principal que es el que hace posible que el sistema funcione correctamente.


xiii
Abstract
The project is based on the design and implementation of a system of care for people with health problems,
with special needs or older age. In order to achieve this goal, we have implemented a system that has as main
piece an Arduino Uno Rev3 board, Arduino gets different data from different modules that make up the
system. With these data a system that has ability to detect falls, establish safety zones, emergency button and
have continuous contact over time through the GSM network .
After a preliminary analysis of the different microcontrollers on the market, we select Arduino. This election
was held for the interest that had to know these microcontrollers, which besides being free software have the
advantage that we have lot of information around these boards
The system implements the funtions through the various modules that form the system, GSM, GPS and IMU.
Firts, we designed communications with these modules, then data are processed by the microprocessor.
Finally, these algorithms are implemented by a main algorithm which is what makes it possible for the system
to function properly.

Índice
Agradecimientos ix
Resumen xi
Abstract xiii
Índice xiv
Índice de Tablas xvi
Índice de Figuras xviii
Notación xxi
1 Introducción 1 1.1 Objetivos del proyecto 5
2 Fundamentos teóricos 7 2.1 Sistemas de referencia en navegación 7
2.1.1 Sistemas de coordenadas en navegación 7 2.2 IMU: Sensores Inerciales 12 2.3 Sistemas de navegación por satélite(GNSS) 14
2.3.1 Global Positioning System (GPS) 14 2.4 Global System Mobile 18
2.4.1 Arquitectura GSM 18 2.4.2 Servicios GSM 20
3 HARDWARE 22 3.1 Arduino Uno rev3 22 3.2 Sensor inercial MPU-9050 25 3.3 Modulo GPS 26
3.3.1 Sentencias NMEA 28 3.4 Modulo GSM 32
3.4.1 Comandos AT o Hayes 33
4 SOFTWARE 35 4.1 Arduino IDE 35 4.2 Matlab 36 4.3 Google Earth Pro 36
5 Arquitectura y desarrollo del sistema 38 5.1 Esquema electrónico general 38 5.2 Alimentación del Sistema 39 5.3 Protocolos de comunicación 42
5.3.1 Protocolo I2C 43 5.3.2 Protocolo UART-TTL 44
5.4 Desarrollo de Algoritmos 45 5.4.1 Algoritmo de detección de caídas 46 5.4.2 Algoritmo de localización 62 5.4.3 Algoritmo de envío de SMS 70 5.4.4 Algoritmo principal 70

xv
6 Resultados 75
7 Conclusiones 80
Referencias 83
Índice de Conceptos 86
Glosario 88
Anexo A: Librerías 89
Anexo B: Esquemáticos 115

Índice de Tablas
Tabla 1 – Población anciana en el mundo 2
Tabla 2 – Tramas NMEA 28
Tabla 3 – Trama datos GGA 28
Tabla 4 – Indicador de posición fijada 29
Tabla 5-– Trama de datos GSA 29
Tabla 8 – Trama GSV 30
Tabla 6 – Modo 1 GSA 30
Tabla 7 – Modo 2 GSA 30
Tabla 9 – Trama RMC 31
Tabla 10 – Trama VTG 32
Tabla 11 - Consumo 42
Tabla 12 – Umbrales de caídas 59
Tabla 13 - Presupuesto 81

xvii

Índice de Figuras
Figura 1- Población mayores 65 años 3
Figura 2 - Clasificación Motivos soledad personas mayores 4
Figura 3 – Sistema de envío SMS 6
Figura 4 – Sistema ECI 8
Figura 5 – Sistema ECEF 9
Figura 6 – Sistema referencia topocéntrico 9
Figura 7 - LLS 10
Figura 8 – Sistema de referencia azimut 11
Figura 9 – Sistema de ejes de cuerpo 11
Figura 10 – Acelerómetro tradicional 13
Figura 11 – Acelerómetro MEMS 13
Figura 12 – Sistema GPS 15
Figura 13 – Segmento de control GPS 16
Figura 14 – Segmentos GPS 16
Figura 15 - Localización GPS 17
Figura 16 – Arquitectura funcional GSM 19
Figura 17 – Sistema GSM 20
Figura 18 – Arduino Uno Rev3 23
Figura 19 – Atmega328p mapa de pines 24
Figura 20 – MPU 9150 25
Figura 21 – Ultimate GPS Adafruit 27
Figura 22 – Modulo GSM/GPRS Lonet 32
Figura 23 – Arduino IDE 35
Figura 24 - Google Earth Pro 36
Figura 25 – Esquema electrónico general 38
Figura 26 – Consumo de microprocesador ATmega328p 40
Figura 27 – Esquema eléctrico alimentación 41
Figura 28 – Alimentación del sistema 41
Figura 29- Medición consumo en el laboratorio 42
Figura 30 – Maestro y esclavo I2C 43
Figura 31 – Trama de datos I2C 44
Figura 32 – Trama de datos UART 45
Figura 33 – Fases de una caída 46
Figura 34 – Tiempo en las fases de una caída 47

xix
Figura 35 – Ejes respecto al cuerpo 48
Figura 36 – Prueba caída hacia adelante 49
Figura 37 – Prueba caída hacia adelante aceleración total 50
Figura 38 – Prueba caída hacia atrás 50
Figura 39 –Prueba caída hacia atrás aceleración total 51
Figura 40 - Prueba caída lateral leve 51
Figura 41 - Prueba caída lateral leve aceleración total 52
Figura 43 – Prueba caída lateral aceleración total 53
Figura 42 - Prueba caída lateral 53
Figura 44 – Prueba acostarse en una cama 54
Figura 45 – Prueba acostarse en una cama aceleración total 54
Figura 46 – Prueba sentarse en una silla 55
Figura 47 - Prueba sentarse en una silla aceleración total 56
Figura 48 - Prueba bajar escaleras 56
Figura 49 - Prueba bajar escaleras aceleración total 57
Figura 50 - Prueba levantarse tras caída 58
Figura 51 – Prueba levantarse tras caída 58
Figura 52 – Diagrama de flujo algoritmo de caídas 60
Figura 53 – Meridianos y paralelos 63
Figura 54- Zona de seguridad 1 63
Figura 55 – Zona de seguridad 2 64
Figura 56 – Zona de seguridad 3 65
Figura 57 – Zonas de seguridad 66
Figura 58 – Diagrama de Flujo Algoritmo de zonas 69
Figura 59 – diagrama de flujo algoritmo principal 74
Figura 60 – SMS pulsador 75
Figura 61 – SMS caída 76
Figura 63 – SMS zona 3 77
Figura 62 – SMS zona 2 77
Figura 64 – SMS zona peligrosa 78
Figura 65 – SMS vuelta a zona 1 79


xxi
Notación
ax Modulo de la aceleración en el eje x
ay Módulo de la aceleración en el eje y
az Módulo de la aceleración en el eje z
aceltotal Suma del modulo de las aceleraciones
GSM Global System for Mobile
SMS Short Message Service
GPS Global Position System
IMU Inertial Measurement Unit
GNSS Global Navigation Satelite System
LED Light Emisor Diode
IMSERSO Instituto de Mayores y Servicios Sociales
INE Instituto Nacional de Estadística
MPU Multiple Process Unit
MEMS Microelectromechanical Systems
ECEF Earth-Centered, Earth-Fixed
ECI Earth Centered Inertial
EEUU Estados Unidos
CE Comunidad Europea
ETSI European Telecommunications Standards Institute
RDSI Red Digital de Servicios Integrados
I2C Inter-Integrated Circuit
UART Universal Asynchronous Receiver-Transmitter
TTL Transistor-Transistor Logic
NMEA National Marine Electronics Association
e número e
sen Función seno
tg Función tangente
arctg Función arco tangente
sen Función seno
sinxy Función seno de x elevado a y
cosxy Función coseno de x elevado a y
Sa Función sampling
sgn Función signo
rect Función rectángulo
Sinc Función sinc
∂y ∂x
x◦
Derivada parcial de y respecto
Notación de grado, x grados.
Pr(A) Probabilidad del suceso A

SNR Signal-to-noise ratio
MSE Minimum square error
: Tal que
< Menor
> Mayor
\ Backslash

23


1
1 INTRODUCCIÓN
There´s nothing I believe in more strongly than getting young people
interested in sicence and engeneering, for a better tomorrow, for all
humankind
Bill Nye
Este proyecto está pensado para la asistencia a las personas de la tercera edad, para que este grupo de
población pueda sentirse autónomo y a la vez seguro, proporcionando a sus familiares la tranquilidad de
saber que el anciano va a estar continuamente localizado, y con unos sistemas de seguridad a su servicio.
Para cuantificar el sector de población al que va dirigido este proyecto, se toma el informe de 2012 del
IMSERSO de las personas mayores en España. En un primer texto se va a ver el tamaño y la evolución de
este grupo de población que va en aumento desde hace unos años.
En España, según los datos oficiales del Censo del 2011 había 46.815.916 habitantes. De ese conjunto de
población, las personas de 65 y más años representaban el 17,3% (8.116.350 personas) frente al 16,6% en
el año 2009. Y de ese colectivo formado por personas mayores, nada menos que el 5,2% tenían 80 y más
años (2.456.908 habitantes, 2011).
Las mejoras en las condiciones de vida generales de la población han permitido que, desde principios del
siglo veinte, el número de españoles aumente de forma significativa. En concreto, desde 1900 hasta la ac-
tualidad, la población española se ha multiplicado por 2,5. Sin embargo, es el grupo de edad de 65 años y
más el que ha experimentado un mayor incremento. Desde 1900 a 2011, las personas de 65 años y más se
han multiplicado por algo más de ocho.
En España, al igual que en el resto de países del área meridional europea, el proceso de envejecimiento de
la población se inició más tarde pero con una intensidad superior que en el resto de países de su entorno.
La proporción de población de 65 y más años ha pasado de representar un 11,2% en 1981 a un 17,3% en
2011, pero que si se traduce a efectivos supone que entre 1981 y 2011 casi se ha duplicado la población
anciana.
En España, además, las proyecciones de población apuntan a que, en las próximas décadas, la población
de 65 años y más seguirá aumentando. En el año 2050 habrá algo más de 15 millones de mayores, casi el
doble que en la actualidad y representarán más de un tercio del total de la población española (36,4%).
Otra de las tendencias previstas es la del denominado «envejecimiento de la población mayor». En un
futuro a largo plazo se producirá un incremento de la población más anciana, es decir, la que supere los
80 años. Según las estimaciones de Naciones Unidas, en el año 2050 el 9% de la población de los países
desarrollados superará los 80 años y el 4% en los países en vías de desarrollo.
En España, los mayores de 80 años han pasado de representar el 0,6% sobre el total de población de 65 y
más años a principios del siglo veinte, al 1,2% en el año 1960 y al 5,2% en 2011. Las proyecciones de
población apuntan a que en el año 2050 las personas de más de 80 años representarán un 14,9% sobre el
total de población mayor.
El envejecimiento de la población mayor tiene implicaciones que trascienden del ámbito estrictamente
demográfico. Por ejemplo, el aumento de las personas mayores dependientes. Edad y dependencia están

Introducción
2
2
estrechamente relacionadas, ya que el volumen de personas con limitaciones de su capacidad funcional
aumenta en los grupos de edad superiores, sobre todo a partir de los 80 años. Pero la dependencia en las
personas mayores no es un fenómeno nuevo. El elemento que ha dado una nueva dimensión al problema
es el proceso de envejecimiento de la población. El aumento del volumen y del peso relativo de personas
mayores, unido a cambios en las formas de organización de la familia y en el papel social de las personas
cuidadoras, han situado a la dependencia en el punto de mira de las políticas sociales.
Previsiblemente, en las próximas décadas también aumentará la población centenaria. Las proyecciones
realizadas por el INE señalan que las personas de 100 años y más pasarán de 8.143 en la actualidad (1
enero 2012), a 13.413 individuos en el año 2020, y 69.386 en 2050. Sobre el total de personas de 65 años
y más, los centenarios pasarán de representar un 0,10% en el 2011, a un 0,14% en 2020 y un 0,45% en el
año 2050.
Mantener y mejorar la calidad de vida de las personas mayores es uno de los principales retos que plantea
el proceso de envejecimiento. En los países desarrollados, el aumento de la longevidad de la población ha
ido acompañado de una contracción de la morbilidad, es decir, de una reducción del número de años
vividos en mala salud. Por el contrario, en los países en vías de desarrollo, la aceleración de la transición
demográfica y epidemiológica junto con niveles inferiores de ingresos y un escaso desarrollo de los siste-
mas de bienestar, no ha incidido en la disminución de la morbilidad. En los países en vías de desarrollo,
por tanto, es esencial la formulación y puesta en práctica de medidas efectivas que incidan en mejorar la
calidad de vida de las personas mayores y por tanto descienda la morbilidad
Tabla 1 – Población anciana en el mundo

3
3 Sistema de seguridad para personas dependientes
En este informe se puede ver claramente que la población anciana va en ascenso, y lo que es peor es que
la calidad de vida en muchos casos desciende con esta edad debido al sedentarismo, en muchos casos este
sedentarismo viene siendo consecuencia del miedo a las caídas, ya sea este miedo del mismo individuo o
el miedo de las familias a la caída de su familiar cuando se encuentra solo. El dispositivo cubrirá esa
necesidad de tener bajo control a tu ser querido, teniendo este a su vez más autonomía para desplazarse
fuera del hogar.
El Instituto Nacional de Estadística (en adelante, INE) acaba de publicar los resultados detallados del
Censo de Población y Viviendas de 2011. Entre ellos, existe información acerca de las formas de
convivencia que mantienen las personas mayores en España. Un indicador fundamental sobre ellas es el
tamaño del hogar en el que habitan. Según esta fuente, de las 7.933.755 personas de 65 o más años
residentes en viviendas principales, prácticamente la mitad se hallan en hogares formados por dos
miembros: representan en concreto el 48,69%, esto es, cerca de cuatro millones. Es el tipo de hogar más
común entre ellas, con diferencia. Por otro lado, un 21,54% habita en hogares unipersonales, lo que en
cifras absolutas equivale a más del millón setecientas mil personas. En cuanto a las demás personas
mayores, el 17,31% vive en hogares constituidos por tres miembros, el 6,73% en hogares de cuatro
miembros y el 5,72% restante en hogares de cinco o más miembros.
Con respecto a los resultados que ofrecieron los censos de población anteriores (de 1991 y de 2001), cabe
destacar el auge que han experimentado tanto los hogares bipersonales como los unipersonales, en detri-
mento de los de mayor tamaño. El retroceso de la viudedad, que sucede en un momento del ciclo familiar
cada vez más tardío, así como la decisión que toman un número creciente de personas cuando pierden a la
pareja de continuar en su domicilio, aun debiendo ser en solitario, en lugar de mudarse con los hijos como
era costumbre en España, explican esa tendencia hacia la simplificación de los hogares en los cuales
residen las personas mayores. Es algo que viene ocurriendo en las últimas décadas: en 1991, por ejemplo,
alrededor del 15% de ellas se encontraban en hogares de cinco o más miembros, un porcentaje que casi
triplica, en efecto, al actual.
En relación a aquellas personas mayores que viven solas, otra encuesta del IMSERSO (realizada en 2010,
por teléfono, a una muestra representativa de 2.535 personas de 65 o más años) indaga sobre por qué
viven así y no de otro modo. La gran mayoría, casi las dos terceras partes, afirma que porque las circuns-
Figura 1- Población mayores 65 años

Introducción
4
4
tancias le han obligado a ello, pero que se han adaptado. En segundo lugar, cerca del 30% declara que
prefieren esta forma de vida a cualquier otra alternativa y, por último, apenas el 7% confiesan que les
gustaría convivir con familiares. Cabe destacar que el argumento voluntario o preferencia por la vida soli-
taria es citado más por los hombres que por las mujeres, así como por las personas de hasta 75 años que
por las que superan esa edad. En cuanto a la postura de rechazo, pese a resultar minoritaria, se da más
entre las mujeres que entre los varones. Junto a los motivos para vivir en solitario, la encuesta informa del
tiempo que llevan haciéndolo: una media en general de doce años, aunque para las mujeres casi alcanza
trece mientras que en el de los hombres no llega a diez.
Como se ha podido observar en el estudio previo estas personas en su mayoría por circunstancias o por
preferirlo acaban viviendo solas, lo que conlleva un riesgo para su seguridad por falta de autonomía
necesaria para en caso de un suceso como puede ser una caída, avisar a alguien para que la socorra en un
periodo leve de tiempo.
Tras una primera introducción a las circunstancias actuales del grupo de población que va dirigido este
dispositivo, vamos a constatar con sendos textos recogidos de distintos informes médicos, la importancia
en un primer caso de una atención temprana en caso de sufrir cualquier percance relacionado con una
caída, en segundo lugar la importancia de la rápida actuación tras un infarto y, por último, la importancia
de la localización para personas con alzhéimer.
En 2009 fallecieron por una caída 1.438 españoles mayores de 65 años. Esto supone el 25 por ciento del
total de muertes accidentales anuales en ese rango de edad, según la Sociedad Española de Geriatría. Las
consecuencias de las caídas suponen con frecuencia el inicio de la discapacidad. Así, una de cada diez
caídas genera lesiones severas, como fractura de cadera y hematoma subdural Así pues, una rápida
intervención tras la caída seria vital para la reducción de este porcentaje.
La Sociedad Española de Cardiología (SEC) advierte de la importancia de intervenir de manera rápida y
eficaz tras una parada cardiaca, siguiendo el protocolo marcado por las Guías de Práctica Clínica de
Reanimación Cardiopulmonar, pues, durante el primer minuto transcurrido tras el evento cardiaco, las
posibilidades de supervivencia si se comienza una reanimación básica, sin esperar al personal
especializado, son del 70%.
Figura 2 - Clasificación Motivos soledad personas mayores
5
5 Sistema de seguridad para personas dependientes
Esta probabilidad va reduciéndose un 10% sucesivamente cada minuto que pasa sin realizar compresiones
torácicas, debido a la falta de oxígeno a la que se ve expuesto el cerebro durante el tiempo que dura la
parada cardiaca. Por ello, el riesgo de lesión cerebral también aumenta un 10% cada minuto transcurrido
tras este episodio, pudiendo padecer hemiplejia, déficit de memoria, de habla o de movilidad de manera
temporal o incluso irreversible.
Tal y como recomienda la nueva versión de estas Guías, publicadas en 2010, tras la parada cardiaca de
un individuo, resulta imprescindible confirmar la inconsciencia y la falta de respiración, aunque puede
persistir una respiración suave e irregular durante el primer minuto. La causa más frecuente de pérdida de
conciencia es una lipotimia, que es benigna, transitoria y no precisa reanimación, así que conviene
detectar bien los síntomas. La lipotimia y la parada cardiaca se pueden distinguir fácilmente, ya que en la
lipotimia persiste la respiración y se recupera la conciencia en menos de uno o dos minutos. En tal caso,
se recomienda tumbar al individuo y levantarle las piernas.
Ante la sospecha de una parada cardiaca se deberá llamar al teléfono de emergencias 112, dando un
mensaje claro y sin demoras, alertando del estado de inconsciencia y de la falta de respiración del
individuo e informando de la presencia o ausencia de dolor torácico y de los antecedentes de enfermedad
cardiaca, en caso de que los hubiera.
Los anteriores párrafos pertenecen a un estudio de la sociedad española de cardiología, y como podemos
observar la activación del SMS de emergencia, pulsando el pulsador de emergencia del dispositivo, puede
salvar muchas vidas.
Por último se ha querido incluir una referencia lo importante que puede resultar tener localizado a una
persona enferma de alzhéimer en todo momento, pues los primeros momentos de desorientación resultan
cruciales.
Según la Fundación Alzheimer España, el enfermo con Alzheimer sufre un drástico cambio en su
personalidad, con tendencia a deprimirse o irritarse. La persona ya no puede seguir instrucciones, sufre
confusión y desorientación en el tiempo y el espacio, pudiendo incluso, llegar a perderse en lugares conocidos
para él. Por lo que siempre es importante en todo lugar y momento que esté localizado el individuo que sufre
la enfermedad pues puede llegar a perderse en cualquier lugar, siendo también bueno que pueda interactuar
con los servicios de emergencias en caso de sentirse agobiado por algún cambio drástico que pueda sufrir
debido a su enfermedad.
1.1 Objetivos del proyecto
El objetivo principal de este proyecto es el diseño de un dispositivo de seguridad para personas mayores o con
problemas de salud. Con este proyecto se espera cubrir todas las necesidades de seguridad que pueda tener una
persona mayor para poder seguir desarrollando una vida activa, dando a su vez seguridad a su entorno familiar.
Se tiene localizada a la persona en todo momento, teniendo el dispositivo un sistema de detección de caídas y
un botón de emergencia para avisar rápidamente a los servicios de emergencia en caso de encontrarse sola la
persona atendida.

Introducción
6
6
El alcance de este proyecto es:
Configurar y testear un sistema de medición inercial MPU-9150
Configurar y testear sensor GPS
Establecer comunicación entre los dispositivos y Microprocesador
Diseñar algoritmos en el procesador para la obtención de los datos
Diseñar algoritmo de detección de caídas
Diseñar algoritmo de posicionamiento GPS y gestión de zonas de seguridad
Diseñar algoritmo central de gestión de emergencias
Diseñar algoritmo de envío de mensajes a la red GSM
Figura 3 – Sistema de envío SMS

7
7 Sistema de seguridad para personas dependientes
2 FUNDAMENTOS TEÓRICOS
Engineering stimulates the mind. Kids get bored easily. They have got to
get out and get their hands dirty: make things, dismantle things, fix things.
When the schools can offer that¸you´ll have an engineer for life.
Bruce Dickinson, 1948
En este capítulo se van a detallar las bases teóricas que se usan en este proyecto
2.1 Sistemas de referencia en navegación
Para poder entender los sistemas de navegación es imprescindible dominar los distintos sistemas de referencia
con los que se va a trabajar, se van a explicar los fundamentos matemáticos de los principios de los sistemas de
navegación. A continuación se introducirá el concepto de sistemas de coordenadas, y dentro de esto se
desglosaran los distintos tipos de sistemas de coordenadas según sus características y el uso que le vaya a ser
dado a dicho sistema. Se verán los siguientes sistemas de referencia:
Sistema inercial geocéntrico (ECI: Earth Centered Inertia.).
Sistemas de ejes tierra (ECEF: Earth Centered, Earth Fixed).
Sistema de referencia topocéntrico.
Sistema de ejes horizonte local (LLS: Local Level System, NED: North East Down).
Sistema de referencia de azimut de deriva (Wander Azimut Frame).
Sistemas de ejes de cuerpo (BFS: Body Fixed System).
Además, se estudiarán las relaciones entre los distintos sistemas y como pasar de uno a otro. En este proceso se
irán definiendo variados conceptos de navegación tales como posición, velocidad, aceleración, aceleración
angular, latitud, longitud, etc.
2.1.1 Sistemas de coordenadas en navegación
Un sistema de referencia viene dado por un punto de referencia denominado origen y un sistema de

Fundamentos teóricos
8
8
coordenadas. El origen de coordenadas es el punto de referencia de un sistema de coordenadas y en él el valor
de todas las coordenadas es nulo. Sobre cada uno de los ejes se definen vectores unitarios, que indican la
dirección del eje.
Un sistema de coordenadas es un conjunto de valores y puntos que permite definir unívocamente la posición
de cualquier punto de un espacio euclídeo.
En este proyecto se utilizarán sistemas de coordenadas ortogonales y orientadas a derechas.
En navegación se usan como mínimo dos sistemas de coordenadas: un sistema objeto y un sistema de
referencia. El primero describe el objeto cuya posición y orientación se desea conocer, mientras el de
referencia describe el cuerpo conocido, normalmente la Tierra, relativo al cual se obtiene la posición y
orientación del objeto.
A continuación se describen los sistemas de referencia principales usados en navegación, enumerados en el
anterior subapartado:
2.1.1.1 Sistema Inercial Geocéntrico (ECI)
Este sistema es especialmente útil para el estudio del movimiento de cuerpos orbitando la tierra, como pueden
serlo los satélites GPS, de hecho en navegación es el sistema de coordenadas usado más comúnmente. Se
define como un sistema de coordenadas inercial, es decir, como aquel que no tiene aceleración ni rotación con
respecto al resto del universo. Aunque este sistema no es realmente inercial, pues se está despreciando el
movimiento de la tierra respecto al sol, y el propio movimiento del Sol respecto a las estrellas, se hace una
aproximación que es válida para el entorno de navegación en el que estamos trabajando.
El eje z coincide con el eje de rotación de la tierra. Los ejes x e y contienen al ecuador y el eje x apunta al
primer punto de Aries (una dirección fija de las estrellas), esta es la mima dirección que la que va desde el
centro de la Tierra hasta la intersección del plano ecuatorial de la Tierra con el plano medio de la órbita
de la Tierra alrededor del Sol (Plano de la eclíptica).
El conjunto de sistemas inerciales son muy importantes para el tema de la navegación pues las leyes de
Newton se pueden considerar aproximadamente ciertas y esto permite trabajar más fácilmente con otros
marcos de referencia no inerciales. En la figura siguiente se puede visualizar un sistema ECI respecto a la
tierra sus elementos diferenciados.
Figura 4 – Sistema ECI

9
9 Sistema de seguridad para personas dependientes
2.1.1.2 Sistema de ejes tierra (ECEF)
Este sistema está ligado a la tierra pues rota con ella, así pues, es un sistema muy útil para referenciar
posiciones terrestres. Es similar al ECI excepto por el detalle mencionado anteriormente, así pues, los ejes
quedarían como se definen a continuación, el eje z seguiría siendo igual que en el ECI pero El eje x va desde
el centro de masas hasta la intersección del ecuador con el CZM (Conventional Zero Meridian) conocido
como meridiano de Greenwich, que define la longitud 0 grados. El eje y, completando el sistema de ejes
ortogonales, apunta a la intersección del ecuador con el meridiano 90º Este. O sea, el plano xy contiene al
Ecuador y el plano xz contiene al meridiano de Greenwich. En la siguiente figura se muestra todos los
elementos de un sistema ECEF respecto a la tierra.
2.1.1.3 Sistema de referencia topocéntrico
El sistema de referencia topocéntrico está ligado íntimamente a la Tierra, con origen donde se encuentre el
observador (E). Suele ser usado para tomar medidas desde Tierra. El plano xy es tangente al Elipsoide
Internacional WGS84 en la superficie, la dirección del eje x apunta al Este, la dirección del eje y al
Figura 5 – Sistema ECEF
Figura 6 – Sistema referencia topocéntrico

Fundamentos teóricos
10
10
Norte, y la del eje z sigue la vertical local " hacia arriba" (cénit). La dirección local " hacia abajo" se
denomina nadir. Las medidas en este sistema se obtienen por tres medidas: r o ρ (distancia al objeto); A ,
azimut; y h la altura sobre el plano horizontal.
En la figura anterior se puede ver una representación del sistema de referencia topocéntrico.
2.1.1.4 Sistema de ejes horizonte local (LLS, NED)
Es un sistema que está centrado en un punto, en el cual se solicita la solución de navegación, que puede estar o
no en la superficie de la tierra. Por tanto el sistema cambia al moverse el punto. Esta representación es
conocida en inglés como North East Down (NED) o Local Level System (LLS) , Es un sistema local con
sus ejes X e Y en el plano tangente al punto de la Tierra donde está el origen. Típicamente el eje
X apuntará al norte, el eje Y al Este y el eje Z abajo (De ahí su nombre en inglés), aunque debe
ser especificado.
En la figura superior se puede observar cómo está definido el sistema respecto al elipsoide: La dirección Norte
es e , la dirección Este es e y la dirección abajo es he . Es el sistema de referencia fundamental en
navegación aunque en ocasiones es sustituido por el de azimut errante (próximo apartado).
2.1.1.5 Sistema de referencia de azimut de deriva
Conocida en inglés como Wander Azimut Frame , se usa frecuentemente en navegación en lugar del sistema
de referencia horizonte local, debido a que dicho sistema en las proximidades de los polos está mal definido
pues en cada polo existe una singularidad, ya que aquí los ejes Norte y Este están sin definir ,y esto ocasiona
numerosos problemas numéricos.
Se rota un ángulo α respecto a la dirección N/E. Dicho ángulo y su variación se deben de definir por el diseñador del sistema de navegación.
Figura 7 - LLS

11
11 Sistema de seguridad para personas dependientes
2.1.1.6 Sistemas de ejes de cuerpo (BFS)
Conocido en inglés como Body Fixed System, este sistema nos proporciona tanto la posición como la
orientación del objeto referido al sistema. El centro del sistema de referencia es el centro de masas del objeto.
El eje x siempre apunta en la dirección usual de avance del objeto, mientras el eje y apunta hacia la derecha
formando 90 grados con el eje x. El eje z de este sistema apunta hacia abajo, en la dirección de la fuerza de la
gravedad. En la figura que se muestra a continuación se describe este sistema: El eje bx contenido en el plano
de simetría del avión, hacia el morro, el ángulo rotado en torno a bx es φ (roll). El eje bz contenido en el avión
hacia abajo, el ángulo rotado entorno a bz es (yaw). El eje by completa los ejes hacia la dirección
aproximada del ala derecha, el ángulo rotado en torno a by es θ (pitch).
Figura 8 – Sistema de referencia
azimut
Figura 9 – Sistema de ejes de cuerpo

Fundamentos teóricos
12
12
2.2 IMU: Sensores Inerciales
Un sensor inercial o IMU( Inertial Measurement Unit ) consta de giroscopios y acelerómetros, que miden la
velocidad, orientación y fuerzas gravitacionales del módulo. Este tipo de sensores tiene distintas aplicaciones
en la actualidad, se suele usar en los aviones y todo el campo de la navegación aérea, seguridad vial (como es
el caso de los airbag), naves espaciales, etc.
El modulo IMU se compone normalmente de acelerómetro y giroscopio, los cuales son ortogonales entre sí
formando un sistema de referencia ortogonal, como es el caso del sistema de referencia body visto en capítulos
anteriores.
Un desarrollo avanzado de los IMU son los sistemas MEMS, que son sistemas micro electromecánicos que
son construidos sobre el mismo sustrato que la electrónica, ofreciendo ventajas en cuanto a consumo y tamaño.
Al adaptar esta tecnología a los circuitos integrados se logran construir sistemas mecánicos de precisión.
Actualmente, gracias a esta tecnología MEMS se están combinando los IMUs con diversos sensores como
termómetros o magnetómetros consiguiendo de esta manera datos de mayor precisión. El motivo de incluir un
sensor de temperatura es corregir los errores térmicos comunes a los demás sensores que forman parte del
IMU.
Un modelo típico de medida sería:
ˆ (1 ) ;m m b
Donde m̂ es la medida del valor real m , es el factor de escala, b es el sesgo y es el ruido en la medida
obtenida. Estos valores se pueden calibrar pero están sujetos a variaciones.
Las principales características de estos dispositivos son:
Ancho de banda: determina la frecuencia máxima de aceleración o giro que son capaces de detectar.
Se asimila a la velocidad máxima a la que se realizan las medidas
Rango de medición
Supervivencia a choques
Ruido (En unidades de medida por Hz ). Mide , se puede usar para calcular como se degrada la
medida acumulada.
Inestabilidad del sesgo (en unidades de medida).Mide el ruido aleatorio que entra en b .
Inestabilidad en el factor de escala (en porcentaje). Mide el ruido aleatorio que entra en .
Con estas características se puede valorar la calidad de un IMU, y se puede valorar si es válido para el
proyecto que se desea diseñar.
El acelerómetro será el principal elemento que se usara en el proyecto, por ello se hace una introducción a este
elemento.

13
13 Sistema de seguridad para personas dependientes
El principio de funcionamiento de un acelerómetro es medir el desplazamiento de una masa testigo. En los
primeros acelerómetros solían constar de un muelle. Un ejemplo de estos acelerómetros se muestra en la
imagen.
Con la llegada de la tecnología MEMS este tipo de acelerómetros fue evolucionando a una versión más precisa
y de menor tamaño.
Los acelerómetros están entre los primeros productos de micro sistemas (MST/MEMS) desarrollados,
surgieron en el final de la década de 1980. Sin embargo, para alcanzar un éxito comercial necesitó el desarrollo
que surgió durante las décadas de los 70, 80, hasta la del 90 con aplicaciones principalmente en los mercados
de la automoción y aeronáutica. Los sensores micrómetro-clasificados miden el movimiento tal como
aceleración, vibración, choque, inclinación, e inclinación. Actualmente, con la tecnología muy madura,
fabricación en volúmenes muy elevados y a un bajo costo, los acelerómetros están en la mejor posición para
moverse con éxito hacia otras aplicaciones, tales como el área médica, industrial y de transporte. Con la
tecnología MEMS, la aceleración puede obtenerse por medio de dos efectos:
Desplazamiento de una masa testigo sostenida por un flexor
Variación en la frecuencia de vibración de un elemento
En el primer caso, los sensores son análogos a una masa suspendida entre resortes, que se desplaza al ser
acelerada. Su sensibilidad es menor que en el segundo caso, aunque cuenta con la ventaja de un fácil y versátil
encapsulamiento. En el segundo, en cambio, la aceleración es obtenida a través de la variación en la
frecuencia de resonancia de vigas en contacto con una masa testigo.
Figura 10 – Acelerómetro tradicional
Figura 11 – Acelerómetro MEMS

Fundamentos teóricos
14
14
La estructura de los acelerómetros como se puede observar en la imagen anterior, está compuesta una masa
testigo cuadrada relativamente pesada, sostenida por cuatro flexores. Unidos a estos, se encuentran unas vigas
que se hacen oscilar electrostáticamente, induciendo la vibración sobre la masa. Las vigas sufren una carga
axial adicional en presencia de una aceleración en la dirección de la vibración, que se manifiesta como una
variación en su frecuencia de resonancia.
Como es el caso del proyecto que se está tratando, uno de los ejes está en la misma dirección que la gravedad,
es por ello que a la hora de medir se debe hacer la consideración de suponer que el objeto esta en caída libre,
puesto que para aplicar la ley de Newton debemos encontrarnos en un sistema inercial, pero como el objeto
esta en caída libre, tenemos que tener en cuenta que el sistema de referencia fijo en el cuerpo (sistema body)
no es inercial. Sin embargo, en reposo sobre la tierra, existe una fuerza de la misma magnitud que la
gravitatoria pero de sentido opuesto, por tanto se puede considerar que es una medida indirecta de la gravedad.
La definición correcta de acelerómetro es dispositivo que mide las desviaciones del estado de caída libre.
2.3 Sistemas de navegación por satélite(GNSS)
Los sistemas de navegación por satélite o GNSS (Global Navegation Satellite System) se refiere al conjunto de
tecnologías de sistemas de navegación por satélite que obtienen información de posición y tiempo con una
cobertura de tipo global.
En la actualidad existen varios sistemas GNSS, el estadounidense que es el Global Positioning System (GPS),
el GLONASS desarrollado por la antigua Unión Soviética, el Galileo desarrollado por la Agencia Espacial
Europea, el chino conocido como Beiduo-1, etc. En este apartado se va a desarrollar el usado en este proyecto
que es el GPS.
2.3.1 Global Positioning System (GPS)
En los años 60 las agencias de EEUU se interesan por desarrollar un sistema global, en 3 dimensiones y de
gran precisión de posicionamiento. A principios de los años 70 nace el GPS , desarrollado por EEUU con fines
militares , este sistema estaba ideado para proporcionar datos de posición de sus unidades de tierra. A
principios de los 80 el sistema es liberado para su uso civil.
El sistema GPS se compone de tres segmentos: el segmento espacial, el segmento de control y el segmento
usuario.

15
15 Sistema de seguridad para personas dependientes
2.3.1.1 Arquitectura Sistema GPS
El segmento espacial está formado por los satélites, que en conjunto de 24 satélites forman una constelación
nominal en 6 planes orbitales, con 4 satélites por plano, estos satélites envían información a los segmentos de
control y usuarios. La constelación se ubica en la órbita media con una altitud aproximada de 20200
kilómetros sobre la tierra. Está compuesta por satélites NAVSTAR, fabricados por Rockwell International y
cada uno tiene un peso estimado de 860 kg. Cada uno de estos satélites lleva a bordo un reloj atómico
sincronizado con el tiempo GPS. Cada satélite emite continuamente un mensaje en dos frecuencias, L1
(1575.42MHz) y L2(1227.6MHz). El mensaje tiene dos partes una parte C/A code y otra P code, estas
contienen una secuencia que permite estimar el tiempo de recepción e información sobre la localización del
satélite.
El segmento de control es una red de estaciones que monitoriza el estado de los satélites, actualiza con
observaciones la posición real de los satélites y sincroniza los relojes atómicos. Las estaciones de
monitorización se establecen en lugares cuyas ubicaciones son establecidas de manera precisa, y
dentro de las mismas se sitúan los relojes sincronizados, que permiten el conocimiento de la
relación de tiempo entre la recepción de la señal proveniente del satélite y el momento exacto de
su utilización, para que no existan errores. Este segmento está controlado por el ejercito de los
EEUU y la estación de control maestra se sitúa en Colorado.
Figura 12 – Sistema GPS

Fundamentos teóricos
16
16
El segmento usuario está formado por un dispositivo formado por una antena, un receptor de radio y un reloj
de cuarzo, a partir de este implementa un algoritmo de estimación de posición. Las señales de entrada son
desmoduladas a partir del uso del reloj de cuarzo que proporciona una referencia en el tiempo. El procesador
de distancias usa algoritmos de adquisición y seguimiento para obtener la distancia recorrida por
las señales desde cada uno de los satélites hasta la antena. Entonces, el procesador de navegación
utiliza las mediciones del procesador de distancias para determinar una solución de posición,
velocidad y tiempo.
Para obtener la posición en un GPS, la solución es obtenida a partir de la determinación de las
distancias recorridas por las señales que envían los satélites. Así, el tiempo de recepción de una
señal 1t , es determinado por el reloj de cuarzo del receptor, mientras que el tiempo de
Figura 14 – Segmentos GPS
Figura 13 – Segmento de control GPS
17
17 Sistema de seguridad para personas dependientes
transmisión de la señal
0t es determinado a partir de la señal enviada por el satélite, el primer
observable que se obtiene es la diferencia entre tiempos 1 0t t t , si llamamos a la
distancia entre el receptor y el satélite , y c es la velocidad de la luz entonces tenemos que
i ic t
Donde el subíndice i se utiliza para indicar el número de satélites.
Si el reloj estuviera perfectamente sincronizado entonces la medida sería exacta, pero hay que
introducirle un error debido al reloj de cuarzo, por esto se conoce el parámetro como
pseudodistancia.
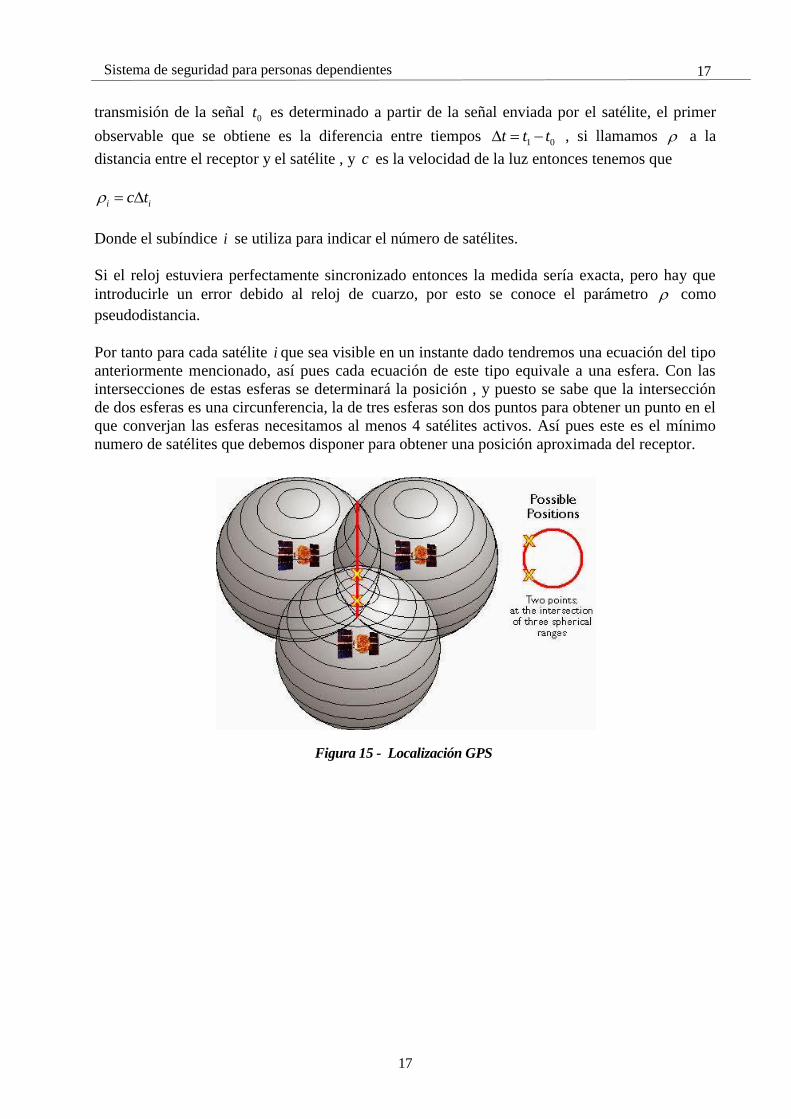
Por tanto para cada satélite i que sea visible en un instante dado tendremos una ecuación del tipo
anteriormente mencionado, así pues cada ecuación de este tipo equivale a una esfera. Con las
intersecciones de estas esferas se determinará la posición , y puesto se sabe que la intersección
de dos esferas es una circunferencia, la de tres esferas son dos puntos para obtener un punto en el
que converjan las esferas necesitamos al menos 4 satélites activos. Así pues este es el mínimo
numero de satélites que debemos disponer para obtener una posición aproximada del receptor.
Figura 15 - Localización GPS

Fundamentos teóricos
18
18
2.4 Global System Mobile
A lo largo de la década de los ochenta se establecieron en Europa sistemas de radiotelefonía móvil celular con
arreglo a estándares distintos, por lo que el ámbito de servicio se limitaba al territorio de cada país. Parecía
conveniente desarrollar una norma europea para la radiotelefonía móvil que permitiera el establecimiento de
un sistema único al menos para todos los países de la comunidad europea, y destinado a un mercado potencial
estimado en varios millones de abonados para el año 2000.
Por otro lado comenzaba a vislumbrarse la liberalizaci6n de las Telecomunicaciones que a1 introducir la
competencia entre operadores provocaría una reducci6n de costes con el increment0 subsiguiente de la
demanda. En consecuencia se constituy6 en la CEPT el Groupe Spéciale Mobile (GSM) con el mandato de
desarrollar esa Norma. Posteriormente, a1 crearse el ETSI, el Grupo GSM pas6 a integrarse en esta Instituci6n.
El nuevo sistema a desarrollar debería ser capaz de dar servicio a un gran número de abonados con
cobertura internacional y ser muy flexible en cuanto a servicios, coberturas y tipos de terminales.
Asimismo debería estar abierto a la interacción con las futuras redes avanzadas de telecomunicaciones.
El grupo GSM definió una serie de requisitos básicos para el nuevo sistema digital, entre 10s que cabe
destacar los siguientes:
Itinerancia internacional, dentro de la CE.
Tecnología digital.
Número telefónico único
Gran capacidad de tráfico.
Utilización eficiente del espectro radioeléctrico.
Sistema de señalización digital.
Servicios básicos de voz y datos.
Amplia variedad de servicios telemáticos.
Posibilidad de conexión RDSI.
Seguridad y privacidad en la interfaz radio, con protección de la identidad de los usuarios y
encriptación de sus transmisiones.
Utilización de teléfonos portátiles.
Calidades altas de cobertura, tráfico y señal recibida.
2.4.1 Arquitectura GSM
La arquitectura de red correspondiente al sistema GSM, está formada por múltiples estaciones base(BTS), que
se conectan con un controlador de estaciones base(BSC), encargado en su caso de la administración de la red.
El sistema compuesto por BSC y BTS es conocido como BSS( Subsistema de estación base).
En la interfaz de línea estarían los centros de conmutación móvil (MSC), al que se conectan físicamente los
BSC. Este es el encargado de establecer la conexión con la RTC( Red de telefonía pública) y con Internet. La
administración de este centro corre a cargo del operador de la red telefónica. El MSC pertenece a un
Subsistema de conmutación de red (NSS), el cual se encarga de identificar a los usuarios, determinar su
ubicación, y gestionar las comunicaciones con otros usuarios de la red. A su vez, el Centro de Conmutación

19
19 Sistema de seguridad para personas dependientes
móvil (MSC) se conecta a una serie de base de datos que le proporcionan funciones adicionales.
La tarjeta SIM es la encargada de identificar en la red al usuario y al terminal móvil. Estos dispositivos se
identifican gracias a un número exclusivo de identificación denominado IMEI (Identificador internacional de
equipos móviles). Por otro lado, la tarjeta SIM también tiene un número de identificación único denominado
IMSI (Identificador internacional de abonados móviles).
La arquitectura funcional define las entidades que tienen a su cargo la ejecución de funciones definidas del
sistema. Los interfaces establecen fronteras de repartici6n funcional. Se han definido dos interfaces físicas que
se denominan interfaz de línea e interfaz aire o interfaz radio.
La interfaz de línea separa el Centro de Conmutación (MSC) del Sistema de Estación Base (BSS). La interfaz
radio delimita la frontera entre la estación de base (BS) y las estaciones móviles (MS).
La partici6n funcional más importante tiene lugar en la interfaz de línea que se separan las funciones
relativas a los aspectos de red y conmutación (MSC. VLR y HLR) y las relacionadas con los aspectos
radioeléctricos, ejecutadas en el BSS.
Entre las funciones relativas a aspectos de red y conmutación destacan:
Autentificación
Localización
Radio-búsqueda
Interfuncionamiento con redes asociadas
Figura 16 – Arquitectura funcional GSM

Fundamentos teóricos
20
20
Figura 17 – Sistema GSM
Las funciones básicas de los elementos más importantes del esquema de arquitectura son:
MSC: Realiza todas las actividades de gesti6n de las llamadas desde hacia las estaciones m6viles y establece
las conexiones con la red telefónica fija.
Registros de localizaci6n: Almacenan informaciones relativas a los abonados residentes y transeúntes.
El HLR es el registro doméstico del abonado, donde se almacena el tipo de abono, c6digo de identificación,
numero, información de localización, etc.
El VLR es un registro de visitantes o transeúntes, donde se inscribe temporalmente un abonado cuando está
situado dentro de la zona de localización dependiente de un MSC.
Para que las estaciones de base radioeléctricas sean lo más simples posible, muchas de las funciones de control
se ejecutan en forma centralizada y compartida en el BSC.
En el centro de autentificación (AUC) se almacena informaci6n de identidad del abonado m6vil y de su equipo
para la verificación de las llamadas.
El centro de operación y mantenimiento ejecuta funciones de supervisi6n técnica del sistema, programa
dotaciones de recursos, ayuda a la localización de averías, genera estadísticas de servicio, etc.
2.4.2 Servicios GSM
En GSM se han especificado los siguientes servicios básicos:
Telefonía digital con códec a la velocidad plena (full rate) de 13 Kbit/s, o a la velocidad mitad (half
rate) de 6,5 Kbit/s, que permite duplicar la capacidad de los canales.
Mensajes cortos SMS, que permite a los usuarios enviar y recibir mensajes breves a través de un
centro de control, incluyendo mensajes de difusi6n a grupos de usuarios.

21
21 Sistema de seguridad para personas dependientes
Tratamiento de mensajes. Servicio de mensajería basado en la Red X.400 del UIT-T.
Facsímil. Permite la conexión de aparatos FAX del Grupo 3 para transmitir o recibir documentos en la
estación móvil.
Servicio de transmisión de datos con conmutación de paquetes, GPRS (General Packet Radio
Service), con velocidades de hasta 170 Kbit/s.
Mensajería Multimedia, MMS para la transmisión de mensajes de voz, texto, imágenes fijas y
m6viles.
En cuanto a servicios suplementarios, también su número es grande, pudiendo destacarse 10s siguientes:
Identificaci6n del abonado llamante.
Redireccionamiento de llamadas.
Llamada en espera.
Terminación de llamadas de usuarios ocupados.
Grupos cerrados de usuarios.
Tarificación (llamadas gratuitas. a cobro revertido, avisos).
Buz6n de voz.
Transferencia de llamadas.
Conferencias múltiples
Prohibición de determinadas llamadas desde el terminal.

HARDWARE
22
22
3 HARDWARE
To the optimist,the glass is half full. To the pessimist, the glass is haft
empty.To the engineer, the glass is twice as big as it needs to be.
Unknown,
En este apartado se va a describir el hardware usado en este proyecto, sus funciones dentro del proyecto y la
configuración que se les da para sus usos dentro del mismo.
El conjunto del hardware usado en este proyecto está compuesto por un modulo Arduino Uno rev3 basado en
el microcontrolador ATmega328p de Atmel, un receptor GPS, un modulo GSM/GPRS y un IMU.
3.1 Arduino Uno rev3
Para este proyecto se ha seleccionado el Arduino Uno rev3 basado en el microcontrolador ATmega328p,
debido principalmente a su costo, la gran cantidad de información existente sobre Arduino y la gran cantidad
de opciones que tiene a la hora de desarrollar un sistema.
Para el proyecto es muy importante que esta placa sea compatible con comunicaciones I2C y serie pues son las
que se llevaran a cabo en este proyecto.
En un primer lugar se van a describir las características de esta placa, Arduino Uno es una placa
microcontroladora basada en ATmega328. Tiene 14 Entradas/Salidas digitales (6 de las cuales pueden
utilizarse como salidas PWM), 6 entrada analógicas, conector USB, clavija hembra tipo Jack, conector ICSP y
botón de reset. Tiene un oscilador interno que funciona a 16MHz. Contiene todo lo necesario para el correcto
funcionamiento del microcontrolador.
Esta versión de Arduino UNO incorpora un ATmega16U2 programado como convertidor serie a USB. Este
chip tiene USB nativo y puede ser reprogramado para que la Arduino sea reconocida al conectarla al
ordenador como cualquier tipo de periférico USB.
Las características principales de la placa Arduino Uno rev3 son:
Microcontrolador ATmega328P
Voltaje de funcionamiento: 5V
Voltaje de entrada recomendado: 7-12V

23
23 Sistema de seguridad para personas dependientes
Voltaje de entrada mínimo-máximo: 6-20V
Pines digitales I/O:14( de los cuales 6 pueden usarse como salida PWM)
Entradas analógicas: 6
Corriente DC para I/O Pin: 20mA
Corriente DC para 3.3V PIN: 50mA
Memoria FLASH de 32 KB(ATmega328P) de los cuales 0.5 KB son usados por el bootlader
Memoria SRAM de 2 KB(ATmega328P)
Memoria EEPROM de 1 KB (ATmega328P)
Velocidad de reloj de 16MHz
Los pines de la placa Arduino y sus funciones son las siguientes:
VIN: Es el pin de entrada de la alimentación cuando se usa una fuente externa de alimentación. En el
caso de que alimentación sea por el puerto USB, se puede acceder a este voltaje de alimentación a
través de este pin.
5V: Este pin de salida proporciona 5V desde el regulador de la placa. La placa puede ser alimentada
con desde DC power jack (7-12V), el conector USB (5V) o el pin VIN (7-12V). No debe ser
alimentada la placa desde este pin pues puede ser dañada.
3.3V: Parecido al anterior pin solo que este suministra 3.3V. Tiene una corriente máxima de 50 mA
Figura 18 – Arduino Uno Rev3

HARDWARE
24
24
GND: Pines de Tierra.
IOREF: Este pin proporciona el voltaje de referencia con el que Arduino Uno está trabajando. La
configuración puede ser 3.3V o 5V
AREF: Voltaje de referencia para los pines analógicos
RESET: Se emplea para resetear o detener el microcontrolador
Las posibles funciones de algunos pines son:
Pines Serial: 0(RX) y 1(TX). Usados para recibir y transmitir por el puerto serial datos. Estos pines
están conectados a los correspondientes pines ATmega8U2 US-to-TTL serial chip.
Interrupciones externas: 2 y 3. Estos pines están configurados para interrupciones externas en algunos
de sus modos.
PWM: Los pines 3, 5, 6, 9,10 y 11. Proporciona una salida PWM de 8 bits.
SPI: Los pines 10(SS), 11(MOSI), 12(MISO), 13 (SCK). Estos pines apoyan las comunicaciones SPI
basándose en la librería SPI.
LED: Pin 13.Cuando el valor es alto el LED está encendido, cuando es bajo está apagado.
I2C: A4 o SDA pin y el A5 o SCL pin. Soportara una comunicación I2C usando la librería wire.
A continuación se muestra la relación de pines entre el microprocesador ATmega328p y la placa Arduino
UNO rev3.
Figura 19 – Atmega328p mapa de pines

25
25 Sistema de seguridad para personas dependientes
3.2 Sensor inercial MPU-9050
Se ha hecho un estudio de mercado buscando un IMU que cumple con los requisitos del proyecto que se va
llevar a cabo, y se ha optado por un MPU-9150. Según la disponibilidad y garantías se seleccionara la marca
del MPU-9150, rondando su precio los 20€.
El MPU-9150 combina dos chips en uno solo, el MPU-6050 que contiene un giroscopio de 3
ejes, acelerómetro de 3 ejes y un procesador de movimiento digital (DMP) capaz de procesar
algoritmos complejos de fusión de movimiento. Adicionalmente tiene un AK8975, una brújula
digital de 3 ejes. En este proyecto finalmente solo se usara el acelerómetro del MPU-6050,
pudiendo utilizarse el resto de dispositivos que tiene este modulo en futuras aplicaciones.
El MPU-9150 opera con 3.3 voltios y usa un protocolo de comunicación I2C, este protocolo se
verá mas adelante con mayor detalle.
Las características principales de este modulo son:
Información de fusión de movimiento digital de los 9 ejes en una matriz de rotación, cuaterniones,
euler, ángulo e información en bruto
Giroscopio de 3 ejes angular con sensibilidades hasta de 131 LSBs/dps y una escala programable de
rango entre ±250, ±500, ±1000, and ±2000dps
Acelerómetro de 3 ejes con un rango programable de ±2g, ±4g, ±8g y ±16g. En el caso de este
proyecto programado a ±8g.
Brújula de 3 ejes con escala completa de rango ±1200µ
Reducción de los efectos de sedimentación y de la deriva del sensor mediante la eliminación de
errores a nivel de placa de alineación del eje transversal entre el acelerómetro, giroscopio y brújula
Figura 20 – MPU 9150

HARDWARE
26
26
Alimentación VDD en el rango de 2.4V-3.46V; voltaje de la lógica de 1.8V ±5% o VDD
Corriente de operación del giroscopio 3.6mA
Corriente de operación del giroscopio + acelerómetro de 3.8mA
Corriente del módulo completo: giro + acelerómetro + brújula + DMP de 4.25mA
Acelerómetro modo de baja potencia, corriente de funcionamiento: 10uA a 1Hz, 20uA a 5Hz, 70uA a
20Hz, 140uA a 40Hz
Se va a hacer una introducción al acelerómetro del MPU-9150 en más detalle ya que es lo que se
usara en este proyecto.
El acelerómetro mide la aceleración en los tres ejes X, Y y Z, las tres dimensiones del espacio. A
la hora de obtener los datos de aceleraciones se debe tener en cuenta que la aceleración de la
gravedad de la tierra es aproximadamente de 29.8 /m s , y perpendicular a la superficie.
Suponiendo que tenemos la IMU alineada según lo queremos utilizar para el proyecto el eje X
estará en un ángulo perfecto de 90 grados con la superficie, marcando la aceleración del eje X 29.8 /m s y siendo aproximadamente nulas la aceleración tanto en el eje Y como en el Z.
A la hora de obtener los valores la IMU da los valores en enteros de 16 bits, estos valores estarán
especificados entorno a un ratio de conversión en el caso del acelerómetro es de 16384 siendo
este el valor correspondiente a 1g en caso de que la configuración del rango del acelerómetro sea
2g , pues el máximo sería 152 32768 y el mínimo valor 152 32768 . Así pues, el rango de
valores que entrega el IMU es [ 32768,32768] siendo a este aplicado su rango de conversión
según el rango del acelerómetro configurado. En el caso que nos concierne el rango configurado
es 8g , lo que llevara a una equivalencia de 1g sea igual a una salida de 4096.
Para la configuración de este modulo se van a usar como referencia las librerías del modulo
mpu6050 ya que solo se da uso en el proyecto al acelerómetro. Esta librería fue diseñada por Jeff
Rowberg, no obstante ha sido modificada por dos motivos, para configurar el módulo mpu-6050
conforme al proyecto que se está llevando a cabo y para optimizar el uso de la memoria del
microcontrolador borrando las funciones que no se usan en este proyecto.
Una vez se ha adaptado la librería a las configuraciones deseadas para el modulo y se ha
optimizado el uso de variables y funciones en la librería se configura la frecuencia de muestro.
3.3 Modulo GPS
El criterio a la hora de la elección del modulo GPS será un sensor económico con unas buenas características
de posicionamiento y que posibilite una conexión optima con el microcontrolador ATmega328p.
Finalmente tras un exhaustivo estudio de mercado hemos decidido seleccionar una placa Ultimate GPS
Breakout de Adafruit, basado en el modulo MTK3339, pues tiene los requisitos que buscamos y además tiene
buena disponibilidad dentro del mercado. También se ha elegido este modulo debido a las librerías de las que

27
27 Sistema de seguridad para personas dependientes
dispone Adafruit para su implementación con Arduino.
El coste económico de este sensor ronda los 35-40€ aproximadamente lo que permite que el sistema tenga un
coste reducido en comparación con precios establecidos en el mercado para este tipo de dispositivos.
Este es un modulo de alta calidad que puede rastrear hasta 22 satélites en 66 canales disponibles, tiene una
muy buena sensibilidad como receptor y una antena acoplada.
Las principales características de este dispositivo son:
Frecuencia de muestreo programable entre 1 y 10 Hz
Precisión en posición: 1.8 m
Precisión en velocidad: 0.1 m/s
Tiempo de arranque medio: 34 segundos
Sensibilidad de adquisición: -145 dBm
Sensibilidad de rastreo: .165 dBm
Velocidad máxima: 515 m/s
Voltaje de entrada: 3-5.5V
MTK3339 consumo de corriente en funcionamiento: 25mA en rastreo, 20mA durante navegación
LED de rastreo integrado
Salida de datos: NMEA 0183, 9600 baudios por defecto
Peso: 8.5 gr
Dimensiones: 25.5mm x 35mm x 6.5mm
Para la configuración del dispositivo el fabricante incluye una librería, que además de configurar el
dispositivo, permite extraer los datos del mismo en distintas estructuras.
Figura 21 – Ultimate GPS Adafruit

HARDWARE
28
28
3.3.1 Sentencias NMEA
Los datos que entrega el dispositivo lo hace por medio de sentencias NMEA (National Marine Electronics
Association). Estas sentencias son un código cifrado que en función del encabezado de la trama se podrán
conocer los datos que está recibiendo el microcontrolador ATmega328p. Se podrá filtrar los datos según el
encabezado gracias al código implementado por la librería que almacenara cada dato en el campo
correspondiente de la estructura. A continuación se van a desglosar los distintos códigos de cifrado que puede
recibir el microcontrolador en su comunicación con el GPS.
Ahora analizaremos en profundidad cada uno de los tipos de tramas recibidas. En un primer lugar se analizará
la trama GGA, que se detectara pues viene precedida de una cabecera $GPGGA.
Tabla 2 – Tramas NMEA
Tabla 3 – Trama datos GGA

29
29 Sistema de seguridad para personas dependientes
El campo de position fix indicator nos indicara si el GPS tiene datos disponibles:
Los primeros datos obtenidos de la fila UTC Time son relativos a la hora en el formato horas,
minutos, segundos.
El segundo campo nos muestra la latitud en grados, al que hay que añadir el segundo campo que
indica la orientación es norte o sur.
El siguiente nos muestra la longitud, transmitido en grados y con una información complementaria en
la siguiente fila que se refiere a si su orientación es este u oeste.
El siguiente dato es fix que ya lo hemos descrito en la tabla anterior, que indica si está en
funcionamiento el GPS.
Por último se envían datos relativos a la altitud respecto al mar .
Para cerrar la trama y terminar la comunicación se reciben los caracteres <CR><LF>
Esta primera trama es la que más interesa al proyecto pues contiene los datos que se van a usar para el
posicionamiento del individuo.
Tabla 4 – Indicador de posición fijada
Tabla 5-– Trama de datos GSA

HARDWARE
30
30
El siguiente tipo de trama se puede ver en la anterior tabla, es la trama con formato GSA, la cual no entramos
en excesivo detalle pues se refiere a los satélites con los que contacta el receptor GPS, lo cual no es de gran
interés para el proyecto.
En esta primera tabla se muestran cada uno de los campos de la trama, siendo detallados los campos Mode 1 y
Mode 2 en las siguientes tablas.
Ahora veremos la información relativa a la trama GSV, que es relativa a la información de los satélites, por lo
que no se entrará en detalle.
Tabla 8 – Trama GSV
Tabla 6 – Modo 1 GSA
Tabla 7 – Modo 2 GSA

31
31 Sistema de seguridad para personas dependientes
La trama RMC es la trama Recommended Minimum Navegation information, por tanto es de gran
importancia pues permite un modo optimo de enviar información. Los datos son similares a la trama GGA,
pero incluyendo el dato de la velocidad.
Si se analiza esta trama se ve que están todos los datos que se necesitan en el proyecto, por lo que para el
proyecto que se está llevando a cabo son validas tanto la trama GGA como la RMC. Por último se mostrara un
ejemplo de trama VTG que es la trama relativa a la información sobre la velocidad respecto a la tierra.
Tabla 9 – Trama RMC

HARDWARE
32
32
3.4 Modulo GSM
Para completar el proyecto era necesario el envío de datos de forma segura desde cualquier localización
geográfica para ello se añadió al proyecto un modulo GSM/GPRS de lonet basado en la SIM800L. Las
características de la placa se adaptan al proyecto por su coste económico y por su bajo consumo.
Figura 22 – Modulo GSM/GPRS Lonet
Tabla 10 – Trama VTG

33
33 Sistema de seguridad para personas dependientes
Las características principales de este modulo se enumeran a continuación:
Quad-band 850/900/1800/1900MHz
Control por comandos AT (3GPP TS 27.007, 27.005 y SIMCOM AT Commands)
Soporta RTC (Real Time Clock)
Alimentación: 3.4V - 4.4V DC
Niveles lógicos de 3.0V a 5.0V
Ultra Bajo Consumo: 1mA en modo sleep
Tamaño: 23x35x5.6mm
Incluye antena GSM/GPRS
Como se especifica en sus características este modulo se controla por medio de los comandos AT, estos
comandos serán de vital importancia para el desarrollo del proyecto por lo que vamos a ver sus principales
características a continuación:
3.4.1 Comandos AT o Hayes
Como se ha detallado con anterioridad el control del modem GSM a través de la interfaz de usuario, se basa en
el uso de comandos AT, estos se envían por el puerto serie de Arduino esperando la respuesta por el mismo
puerto.
Puesto que la lista de comandos AT es muy extensa solo se van a analizar los que potencialmente se van a usar
en el proyecto actual.
Existen dos tipos principales de comandos:
Comandos que ejecutan acciones inmediatas (por ejemplo: ATD marcación)
Comandos para cambiar la configuración del modem(por ejemplo: CGMF activa modo texto)
Principalmente se va a trabajar con mensajes de texto, así pues se describen a continuación este tipo de
mensajes.
Podemos dividir los comandos referidos a mensajes de texto en dos grupos:
1. Configuración del sistema de envío o recepción:
AT+CMGF (Message Format): Con este comando se configura el tipo de mensaje que se va a
usar, pueden ser dos tipos, si es igual a 1 será tipo texto, y si es igual a 0 será tipo PDU (Modo
binario).
AT+CPMS(Preferred Message Storage): Selecciona los valores de las 3 memorias existentes. La
primera es la de lectura, borrado y reenvío de mensajes, la segunda es la que contiene los
mensajes escritos pero no enviados, mientras la tercera es donde se almacenan los nuevos

HARDWARE
34
34
mensajes recibidos.
AT+CSMP(Set Text Mode parameters): Entre otros, configura el tiempo máximo de
permanencia de un mensaje en el centro de servicio antes de su envío al destinario final.
AT+CSCA(Service Centre Address): Es el que establece el número del centro de servicio,
correspondiente al servidor.
AT+CNMI(New Message Indications to TE). Configura la metodología de notificación de un
mensaje nuevo recibido.
2. Acciones
AT+CMGR (Read Message): Lee un mensaje recibido de la memoria seleccionada
anteriormente.
AT+CMGD (Delete Message): Borra un mensaje recibido de la memoria seleccionada
anteriormente.
AT+CMGW (Write Message to Memory): Escribe un mensaje en la primera posición que tenga
la memoria libre para su posterior envío, lectura o almacenamiento.
AT+CMGS(Send Message): Envía un mensaje, cuyo contenido se debe especificar, y
anteriormente también se debe especificar el destinatario. El formato es orden-número destino-
contenido.
AT+CMSS(Send From Storage): Envia un mensaje almacenado en una determinada posición de
memoria.
Además de estos comandos básicos se usaran algunos más que están incluidos en el manual de comandos
AT del chip SIM800L, el cual se puede consultar en el enlace que se muestra a continuación:
(http://www.seeedstudio.com/wiki/images/5/51/SIM800_ATCommand_Manual_V1.02.pdf).

35
35 Sistema de seguridad para personas dependientes
4 SOFTWARE
Software is a great combination between artistry and engineering
Bill Gates
Se describen a continuación el software utilizado para el desarrollo del proyecto, con este software se han
elaborado labores de diseño, testeo, procesado de datos y control.
4.1 Arduino IDE
Este el entorno de programación que usa Arduino para escribir, compilar y descargar el código en sus placas,
en concreto con la que se usa en este proyecto, Arduino Uno Rev3 funciona correctamente.
Este entorno de programación tiene entre sus puntos a favor que facilita la implementación de un gran número
de bibliotecas, que desarrollan numerosas funciones matemáticas o de comunicación para su aplicación en el
código. Cabe destacar que es un software libre y la existencia de un puerto terminal serie para la comunicación
con la placa que es muy útil a la hora de testear que el código cumpla con los esperado.
Figura 23 – Arduino IDE
SOFTWARE
36
36
Entre sus puntos negativos, el más significativo es la simplicidad del entorno del que se echa en falta muchas
de las opciones que si traen otros programas como el que veremos en el siguiente punto.
4.2 Matlab
Según se define el programa en su propia web, MATLAB es un lenguaje de cálculo técnico de alto nivel y un
entorno interactivo para el desarrollo de algoritmos, la visualización de datos, el análisis de datos
y programación.
Todo el trabajo de visualización y análisis de datos realizado en este proyecto se ha realizado a través de este
programa, incluyendo también la elaboración de las gráficas realizadas.
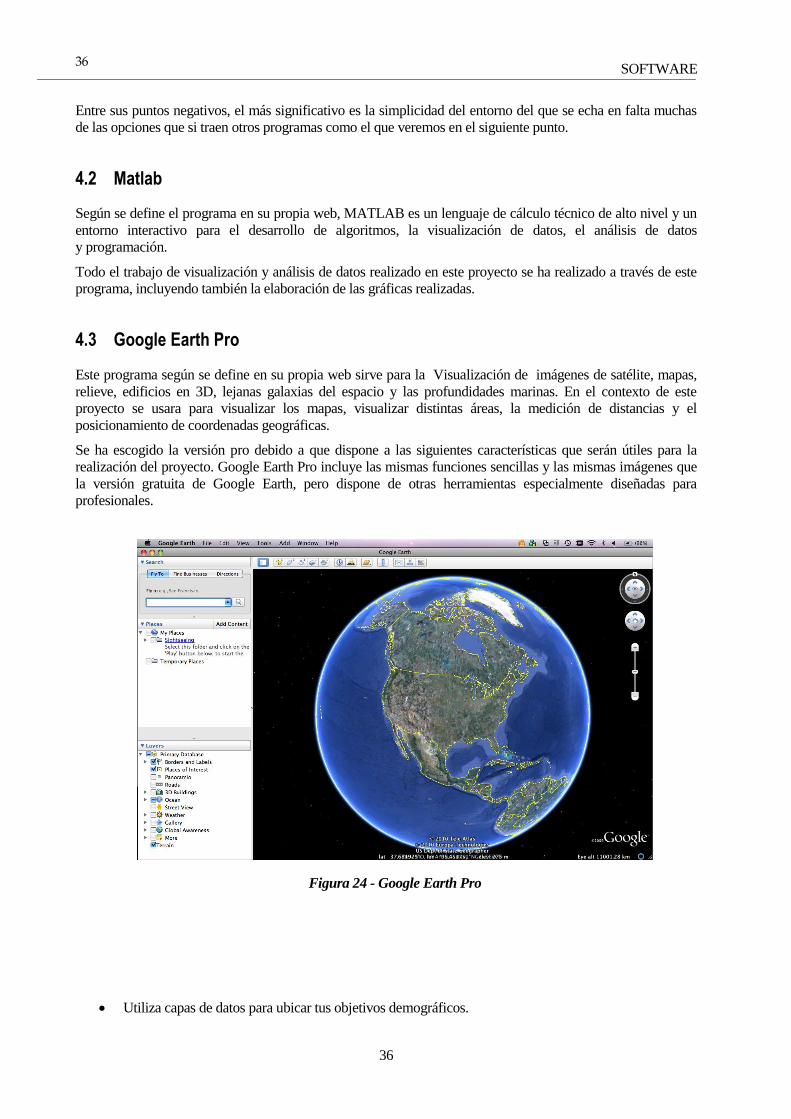
4.3 Google Earth Pro
Este programa según se define en su propia web sirve para la Visualización de imágenes de satélite, mapas,
relieve, edificios en 3D, lejanas galaxias del espacio y las profundidades marinas. En el contexto de este
proyecto se usara para visualizar los mapas, visualizar distintas áreas, la medición de distancias y el
posicionamiento de coordenadas geográficas.
Se ha escogido la versión pro debido a que dispone a las siguientes características que serán útiles para la
realización del proyecto. Google Earth Pro incluye las mismas funciones sencillas y las mismas imágenes que
la versión gratuita de Google Earth, pero dispone de otras herramientas especialmente diseñadas para
profesionales.
Utiliza capas de datos para ubicar tus objetivos demográficos.
Figura 24 - Google Earth Pro

37
37 Sistema de seguridad para personas dependientes
Calcula distancias y áreas utilizando herramientas de medición.
Utiliza Movie Maker para producir medios colaterales
Imprime imágenes de alta resolución para presentaciones e informes.
Importa archivos vectoriales de imágenes de gran tamaño para representar datos SIG en un mapa.
Crea mapas de direcciones con Spreadsheet Importer.

Arquitectura y desarrollo del sistema
38
38
5 ARQUITECTURA Y DESARROLLO DEL SISTEMA
One machine can do the work of tifty ordinary men. No machine can do
the work of one extraordinary man.
Elbert Hubbard
En este apartado se va a tratar todo lo relacionado a la integración de los distintos dispositivos hardware
enumerados anteriormente. Se va a hacer una descripción detallada de las conexiones entre los pines de los
distintos módulos, la alimentación del sistema y de cada uno de los módulos, los protocolos de comunicación
que usan para comunicarse, y las funciones que hacen estos módulos dentro del sistema detallando los
algoritmos que se han desarrollado convenientemente.
5.1 Esquema electrónico general
A continuación se muestra un esquema electrónico general donde se pueden apreciar las conexiones entre los
pines de los distintos módulos hardware pertenecientes al sistema.
Figura 25 – Esquema electrónico general

39
39 Sistema de seguridad para personas dependientes
Como se puede apreciar en el esquema anterior el sistema está diseñado entorno al módulo Arduino Uno
Rev3, que contiene el microprocesador. El microprocesador será el encargado de establecer las conexiones con
los distintos módulos que forman el sistema, y a su vez del manejo de los datos adquiridos para implantar un
algoritmo central que lleve a cabo los objetivos del sistema.
El conjunto hardware que forma parte de este proyecto está constituido por un IMU, que se comunica con el
microcontrolador a través del protocolo I2C, un módulo GPS, que se comunica por medio del protocolo
UART y por ultimo un modulo GSM que se comunica a través del protocolo UART. Estos se utilizan para
obtener las distintas mediciones necesarias para el funcionamiento del sistema. Con el IMU se obtienen los
datos de las aceleraciones en los tres ejes, que se usan en el algoritmo de detección de caídas. El GPS obtiene
los datos de posición en coordenadas ECEF y la hora, que se usarán en el algoritmo función localiza y en la
función principal del sistema. Así, el módulo GSM a través del algoritmo de envíos de SMS, será el encargado
de enviar la información adquirida a través de la red al usuario final del sistema. Así pues, las comunicaciones
usadas serán detalladas en próximos apartados así como los diferentes algoritmos utilizados para implementar
el sistema.
Aparte de los módulos nombrados anteriormente, se incorpora al sistema un pulsador que se comunica con el
microprocesador por medio de un circuito pull-down conectado a un pin digital que se configura como
entrada. Este pulsador se usa para enviar una señal al microprocesador para que envíe un SMS de auxilio en
caso de problemas de salud como puede ser un fallo cardiovascular. Además el sistema incorpora un LED
externo conectado a un pin digital, que emitirá luz en caso de que se envíe un SMS.
5.2 Alimentación del Sistema
En este apartado se va a detallar la alimentación que demanda cada uno de los módulos, así como la fuente de
alimentación principal del sistema que se basará en una batería LiPo. A continuación se van a detallar las
especificaciones de potencia de los distintos módulos del proyecto.
El módulo Arduino Uno Rev3, puede operar con una alimentación externa de entre 6 a 20 Voltios, esta
alimentación le será proporcionada a través del jack de 2.1mm que lleva la placa incorporada. Pero hay que
tener en cuenta que si se suministran menos de 7 Voltios, el pin de 5V suministrará menos de 5 Voltios por lo
que no es recomendable que sea menor, pues puede producirse inestabilidad. Sí se usa más de 12 Voltios el
regulador interno de la placa puede sobre calentarse por lo que lo más recomendable es usar un Voltaje
comprendido entre 7 y 12 Voltios. El consumo de corriente del microcontrolador, ATmega328p a una
frecuencia de trabajo de 16 MHz, es aproximadamente de unos 11 mA, a este consumo hay que añadirle que la
placa no integra sólo el microcontrolador, sino un regulador de tensión, conversor Serie-USB, LEDs,
condensadores, resistencias, cristal (marca los pulsos de reloj para hacer funcionar el microcontrolador a
16Mhz), diodos, etc. Esto dispara el consumo a entorno 30 mA en un modo de funcionamiento normal.

Arquitectura y desarrollo del sistema
40
40
La placa Arduino Uno Rev3 tiene además salidas para alimentar distintos periféricos, estas salidas son de 5 o
3.3Voltios. La salidas de 5 y 3.3 Voltios puede proporcionar una corriente máxima de alimentación de 50 mA.
Y cada uno de sus puertos de entrada/salida puede proporcionar o recibir un máximo de 40 mA. Por lo que
tanto el módulo GPS como el módulo IMU serán alimentados desde la placa de Arduino, pues como veremos
a continuación cumplen los requisitos de potencia descritos anteriormente y por tanto son compatibles. No así
el módulo GSM pues como veremos a continuación requiere una tensión de entrada que no se puede
suministrar desde la placa Arduino.
Las especificaciones eléctricas del módulo GPS nos llevan a una tensión de entre 3 y 5.5 Voltios y según sus
especificaciones a un consumo de corriente de 25mA en modo búsqueda, y un consumo de unos 20 mA
durante la fase de navegación. Como se puede comprobar estas especificaciones son compatibles con la
alimentación suministrada por la placa Arduino Uno Rev3 por lo que se alimentara desde el pin de 5 V el
modulo GPS.
Como se puede ver en apartados anteriores las especificaciones eléctricas del modulo IMU, con un voltaje de
entrada de entre 2.375 y 3.465 V y un consumo de corriente en nuestro caso (que están deshabilitados tanto el
giroscopio como el magnetómetro) de aproximadamente 1mA, el modulo IMU es perfectamente compatible
con la alimentación de 3.3V que suministra la placa Arduino Uno Rev3 en uno de sus pines.
El modulo GSM tendrá una entrada de entre 3.4 y 4.4V, así pues necesitará una alimentación externa que
cumpla esos requisitos. El consumo de corriente de este módulo será diseñado para que cuando no este activo
este en modo de mínima energía, en este modo el módulo consume 0.796 mA, y en el momento que este
activo (cuando tenga que enviar un SMS) se activara el modo de funcionalidad completa con un consumo de
1.02mA. Este consumo tendrá picos de corta duración de tiempo en el momento en el que se envíe el SMS,
pero esos picos siempre estarán dentro del rango de admisión del suministrador de potencia por tanto no debe
haber problemas de caídas de tensión.
Finalmente hay que tener en cuenta también el consumo del LED externo, puesto que tiene en serie una
resistencia de 220 Ohm será de entorno unos 20 mA que puede suministrar sin problema la placa Arduino Uno
Rev3. Sin embargo, el consumo del pulsador será despreciable, puesto que el circuito pull-down está
compuesto de una resistencia de 10k será entorno a 0.5mA, que está dentro del rango que puede proporcionar
los puertos digitales de la placa Arduino Uno Rev3.
Figura 26 – Consumo de microprocesador ATmega328p

41
41 Sistema de seguridad para personas dependientes
Una vez se han descrito los requisitos de alimentación de los distintos módulos, se adopta la decisión de
alimentar el sistema a través de una Batería LiPo de 7.4V 2200 mAh lo que proporcionará al sistema una
autonomía muy interesante que se calculará a continuación.
Comentar que puesto que todos los módulos a excepción del GSM pueden ser alimentados desde la placa
Arduino Uno Rev3, se diseñara un circuito de alimentación por el que la batería alimentará directamente la
placa Arduino Uno Rev3, y paralelamente se alimentará el módulo GSM a través de un circuito reductor DC
step down, en este caso uno basado en el LM2596, que convierte cualquier voltaje comprendido entre 3.2 y 40
V DC a entre 1.25 y 35 V DC para un máximo de 3A.
Por último se hará un estudio tanto práctico como teórico de la autonomía que proporciona, a continuación se
muestra una tabla con los datos teóricos de consumo obtenidos de las especificaciones, y los datos prácticos
obtenidos de una prueba en el laboratorio.
Figura 27 – Esquema eléctrico alimentación
Figura 28 – Alimentación del
sistema
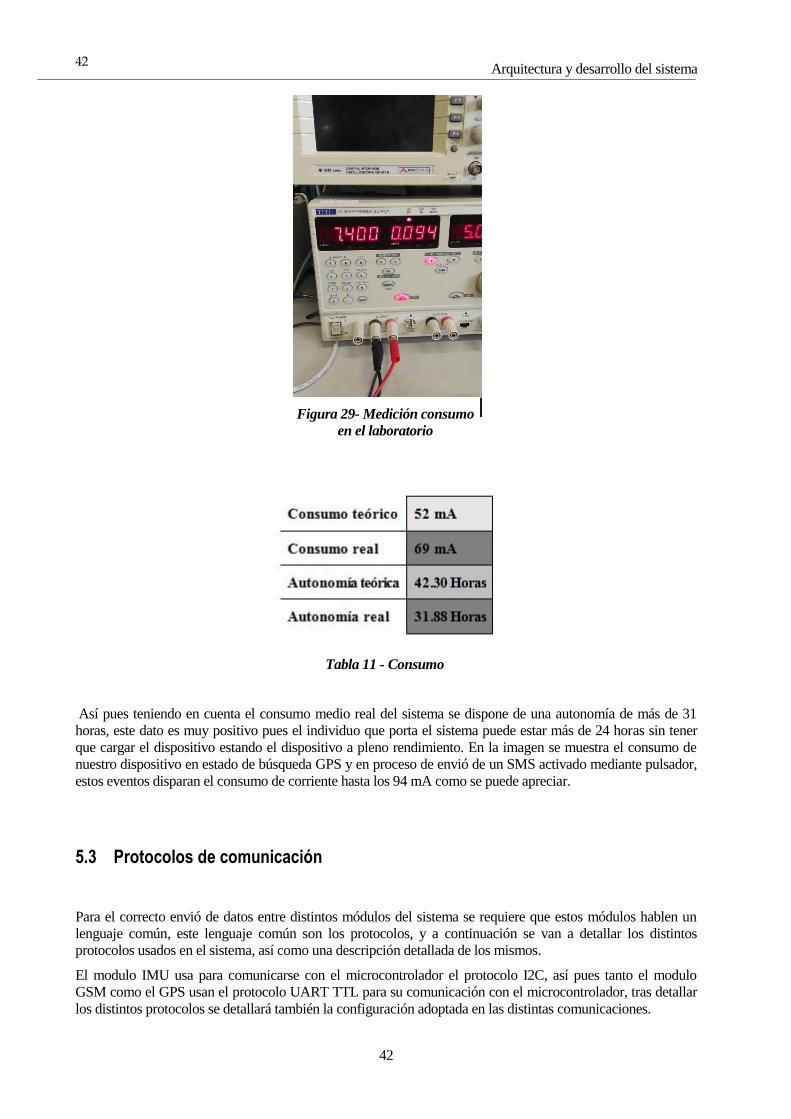
Arquitectura y desarrollo del sistema
42
42
Así pues teniendo en cuenta el consumo medio real del sistema se dispone de una autonomía de más de 31
horas, este dato es muy positivo pues el individuo que porta el sistema puede estar más de 24 horas sin tener
que cargar el dispositivo estando el dispositivo a pleno rendimiento. En la imagen se muestra el consumo de
nuestro dispositivo en estado de búsqueda GPS y en proceso de envió de un SMS activado mediante pulsador,
estos eventos disparan el consumo de corriente hasta los 94 mA como se puede apreciar.
5.3 Protocolos de comunicación
Para el correcto envió de datos entre distintos módulos del sistema se requiere que estos módulos hablen un
lenguaje común, este lenguaje común son los protocolos, y a continuación se van a detallar los distintos
protocolos usados en el sistema, así como una descripción detallada de los mismos.
El modulo IMU usa para comunicarse con el microcontrolador el protocolo I2C, así pues tanto el modulo
GSM como el GPS usan el protocolo UART TTL para su comunicación con el microcontrolador, tras detallar
los distintos protocolos se detallará también la configuración adoptada en las distintas comunicaciones.
Figura 29- Medición consumo
en el laboratorio
Tabla 11 - Consumo

43
43 Sistema de seguridad para personas dependientes
5.3.1 Protocolo I2C
El I2C es un bus de comunicaciones en serie diseñado en 1992. Su nombre proviene de Inter-Integrated
Circuit. La velocidad de transmisión es de 100 Kbits/s en el modo estándar, aunque puede permitir velocidades
de hasta 3.4 Mbit/s. Este bus es muy utilizado en electrónica para comunicar microcontroladores y sus
módulos periféricos en sistemas empotrados.
I2C permite hasta cuatro velocidades:
100 Kbit/s Estándar
400 Kbit/s Modo rápido
1 Mbit/s Modo rápido Plus
3.4 Mbit/s Modo alta velocidad
La principal característica del I2C es que utiliza dos líneas para transmitir la información, una para los datos
(SDA) y otra para la señal de reloj (SCL). Además de estas dos líneas, es necesaria una tercera línea de
referencia o tierra (GND).
Los dispositivos conectados al bus I2C tienen una dirección única para cada uno de ellos, a su
vez pueden ser configurados como maestros o esclavos. El dispositivo maestro es el encargado
de inicializar la transferencia de datos, y además es el que genera la señal de reloj. La
característica de ser maestro no tiene que ser proporcionada al mismo dispositivo siempre, sino
que puede intercambiarse entre los distintos módulos que tengan esa capacidad.
Las características principales de comunicación del bus I2C se muestran a continuación:
El bus está libre cuando SDA y SCL están en estado lógico alto.
En estado del bus libre, cualquier dispositivo puede ocupar el bus I2C como maestro.
El maestro comienza la comunicación con el envío de un patrón llamado start bit. Esto
alerta a los esclavos poniéndolos en modo espera de una comunicación.
El maestro para dirigirse al dispositivo con el que va a realizar la comunicación envía un
byte que contiene los siete bits(A7-A1) que componen la dirección del esclavo con que se
quiere comunicar, el octavo bit que compone el byte , el bit A0 el de menor peso, se
corresponde con el bit de operación R/W , si el bit esta a 1 será de lectura y si el bit esta a
0 será una operación de escritura.
Figura 30 – Maestro y esclavo I2C

Arquitectura y desarrollo del sistema
44
44
La dirección enviada será comparada por el esclavo con su propia dirección, en caso de
que ambas coincidan, el esclavo se considera direccionado como esclavo transmisor en el
caso de que el bit R/W = 1 y como esclavo receptor en caso de que el bit R/W = 0.
El esclavo responde enviando un bit de ACK que le indica que conoce la solicitud y que
está en condiciones de comunicarse, en caso de no ser así y no corresponderse la
dirección enviada con la del esclavo se envía un bit NACK.
Seguidamente comienza la fase de intercambio de información entre los dispositivos
El maestro envía la dirección del registro interno del dispositivo que se desea leer o
escribir (en el caso del proyecto el registro del acelerómetro).
El esclavo responde con otro bit de ACK en caso de que todo este correcto.
Ahora es cuando el maestro empieza a escribir o leer bytes de datos. Todos los bytes de
datos deben constar de 8 bits , el número máximo de bytes que se pueden enviar en una
comunicación no están restringidos, siendo el esclavo el que fija la cantidad de acuerdo a
sus características
Cada byte leído/ escrito por el maestro debe ser obligatoriamente asentido por un bit
ACK por el dispositivo esclavo
Se repiten los dos pasos anteriores hasta finalizar la comunicación entre maestro y
esclavo.
Aun cuando el maestro siempre controla el estado de la línea del reloj, un esclavo de baja
velocidad o que deba detener la transferencia de datos mientras efectúa otra función,
puede forzar la línea SCL a nivel bajo. Esto hace que el maestro entre en un estado de
espera, durante el cual, no transmite información esperando a que el esclavo esté listo
para continuar la transferencia en el punto donde había sido detenida.
Cuando la comunicación termina, el maestro transmite una stop condition para dejar el
bus libre.
Un ejemplo de comunicación entre un Maestro y un esclavo se muestra en la siguiente imagen.
Siguiendo las características vista anteriormente, con la ayuda de las librerías de Jeff Rowberg que se muestran
en el apartado anexos, se configura el dispositivo MPU 9150 para que establezca comunicaciones
correctamente con el microprocesador. Se configura a una velocidad estándar de 100 Kbit/s y se activa el bit
de lectura R/W pues es el microprocesador el que recibe la información del acelerómetro.
5.3.2 Protocolo UART-TTL
UART es uno de los protocolos serie más utilizados. La mayoría de los microcontroladores disponen de
hardware UART. Usa una línea de datos simple para transmitir y otra para recibir datos. Comúnmente, 8 bits
de datos son transmitidos de la siguiente forma: un bit de inicio, a nivel bajo, 8 bits de datos y un bit de parada
a nivel alto.
Figura 31 – Trama de datos I2C

45
45 Sistema de seguridad para personas dependientes
Un transmisor serie asíncrono debe ser capaz de recibir los datos del procesador a través de un bus y enviarlos
de forma serie al exterior. Para ello el componente esencial de un transmisor serie es un registro de
desplazamiento. Este registro no es accesible directamente. El procesador carga el byte a transmitir en un
registro llamado Registro de Mantenimiento de la Transmisión (THRE), que está conectado a las entradas del
registro de desplazamiento (TSR).
El protocolo asíncrono está orientado al carácter, cada byte que se transmite se rodea de un grupo de bits
necesarios para la comunicación y que describiremos a continuación. Cuando no hay datos que transmitir la
línea o salida del transmisor se encuentra en el estado lógico 1 "MARK".
Previo a la transmisión del byte, la línea se pone a 0 lógico durante el tiempo de un bit, esto es el bit de start.
Esto se utiliza para avisar y sincronizar al receptor de la existencia de un dato. A continuación van los bits del
carácter comenzando por el menos significativo, el bit de paridad (opcional) cuyo objetivo es el control de
errores y, en último lugar, el bit de stop que marca el final de un carácter.
Para comunicarse a través del puerto serie UART se transmite en un rango de velocidad desde los 9600 bps
hasta los 115200 bps, este método de comunicación en ocasiones, como es el caso, se encuentra referido a
TTL serial ( transistor-transistor logic). La comunicación serie al nivel lógico TTL, está siempre referida a
valores de tensión entre 0V y Vcc, que está a su vez entre 5V y 3.3V. Un uno lógico está representado por Vcc
y un cero lógico por 0V.
En relación al proyecto se utilizara esta comunicación para el envío y recibo de información con el modulo
GPS, y para el envío de información al modulo GSM. A continuación detallaremos las configuraciones de
ambos módulos al respecto de la comunicación UART-TTL.
El modulo GSM se configura para una tasa de envío de datos de 9600 baudios con una frecuencia de
actualización de 1 Hz, el envío de los datos se hará por medio de secuencias NMEA que están descritas en el
apartado correspondiente. Conforme va llegando esta información al microprocesador se va guardando en una
variable tipo char, que tras ser completada, se analiza y se guarda la información en los distintos campos de la
estructura GPS. Este proceso es realizado con la ayuda de la librería Adafruit_GPS que proporciona el
fabricante y que se muestra en la sección de anexos.
Por su parte el modulo GSM se configura también a una velocidad de 9600 baudios, y se envía/recibe
información por medio de los comandos AT, que han sido detallados en apartados anteriores. La configuración
e implementación de este modulo se lleva a cabo directamente en los algoritmos diseñados para tal fin, estos
algoritmos se mostrarán en apartados posteriores.
5.4 Desarrollo de Algoritmos
En este apartado se van a detallar los distintos algoritmos que se usan para implementar las funciones deseadas
en el sistema.
Figura 32 – Trama de datos UART

Arquitectura y desarrollo del sistema
46
46
5.4.1 Algoritmo de detección de caídas
Se va a implementar un algoritmo para la detección de caídas a través de las lecturas del acelerómetro, para la
implementación de este algoritmo lo primero que se va a hacer es definir las fases de una caída, tras esto se
clasificaran los tipos de impacto, y finalmente se diseñará el algoritmo de detección de caídas.
5.4.1.1 Fases de una caída
Para estudiar las fases de una caída se ha hecho una simulación de una caída frontal, y se han capturado los
datos que envía el acelerómetro para definir cada una de las fases de la caída.
En esta primera gráfica se pueden observar cada una de las aceleraciones en los tres ejes x,y,z , detallándose
las fases de la caída y los instantes de tiempo en los que se suceden.
En la siguiente gráfica se muestra la suma del módulo de las aceleraciones. Donde también se pueden
distinguir cada una de las fases de una caída.
Figura 33 – Fases de una caída

47
47 Sistema de seguridad para personas dependientes
Se pueden observar claramente que una caída está compuesta de tres fases temporales, estas fases son:
1. Fase de reposo: En esta fase la suma de los módulos de las aceleraciones esta a aproximadamente 1g,
puesto que se está hablando de un sistema inercial, esto quiere decir que el objeto medido esta en
reposo con respecto a la tierra.
2. Fase de Caída Libre: En esta fase el cuerpo del paciente toma un movimiento que es parecido a un
objeto en caída libre, pues se dirige el paciente en dirección vertical hacia el suelo. La aceleración en
el eje x tomará en algún momento de la caída el valor 0 pues es el eje que está alineado con la
dirección de la fuerza de la gravedad. Esta etapa es considerada la fase inicial de la caída puesto que
debido a la gravedad en la tierra después de cada fase de caída libre hay un impacto con su
correspondiente aceleración en el sentido opuesto a la caída. Como se puede observar en la grafica en
esta etapa la suma del modulo de las aceleraciones disminuye de 1g a 0g. La duración de esta etapa no
contemplamos que dure más de 1 segundo pues suponemos que el paciente estará a una altura con
respecto al suelo no superior a los aproximadamente 5 metros que se desplaza un cuerpo en caída libre
en ese tiempo. Así siendo la altura media española en torno a 1.75 metros , la media de duración de
esta fase está en torno a los 350 ms, despreciando su dinámica y la resistencia que el paciente pueda
poner a la caída por lo tanto en la mayoría de los casos este tiempo será inferior a 350 ms.
3. Fase de Impacto: Tras la etapa de caída libre, debido a la gravedad en la tierra, el paciente choca con
el suelo o objetos en su camino vertical descendiente, dando como respuesta un pico de la suma de los
módulos de las aceleraciones debido a la desaceleración que se produce al frenar la caída libre.
Tras esta última fase de impacto se vuelve de nuevo a la fase de reposo.
5.4.1.2 Clasificación de los eventos de impacto
Viendo estas tres fases ya se puede definir el proceso de una caída, una vez se ha hecho esto, procedemos a
clasificar los tipos de caídas, y los distintos actos cotidianos que podrían dar lugar a confusión y considerarse
una caída cuando esta no se ha producido. Los eventos que debemos detectar como caída son:
Figura 34 – Tiempo en las fases de una caída

Arquitectura y desarrollo del sistema
48
48
Caída hacia delante
Caída hacia atrás
Caída lateral derecha
Caída lateral izquierda
Suponiendo también que una combinación de las anteriores será detectado como caída.
Los eventos cotidianos que el sistema no debe detectar como caídas son:
Acostarse/Reclinarse en una cama
Sentarse en una silla
Bajar unas escaleras
A continuación se van a detallar las gráficas y se van a analizar los resultados de las pruebas realizadas para
cada uno de los eventos descritos anteriormente. En la siguiente imagen se detallan los ejes de coordenadas
según la posición de nuestro dispositivo. (Aclarar que por estética se muestra la parte negativa del eje y)
Figura 35 – Ejes respecto al cuerpo

49
49 Sistema de seguridad para personas dependientes
En la siguiente gráfica se puede observar las aceleraciones obtenidas para una simulación de caída hacia
delante, con un mecanismo físico que simula el comportamiento humano, al que se ha añadido el módulo
MPU-9150 a la altura aproximada de una cadera humana, perteneciente a una persona de estatura media.
En esta primera gráfica aparecen por separadas cada una de las aceleraciones en los 3 ejes, en un primer
momento se puede ver que el individuo está en posición erguida, pues la aceleración del eje x (eje alineado con
la dirección de la fuerza de la gravedad) es igual a 1g, mientras que tanto en el eje Z como en el Y es igual a
0g. Después de este estado de reposo erguido el individuo tropieza hacia delante produciéndose un momento
de caída libre en el que la suma de los módulos de las tres aceleraciones es igual a 0. Tras la caída libre viene
la fase de impacto del individuo con el suelo o con algún objeto que se encuentre en su trayectoria vertical
descendente, es entonces cuando se produce un pico de desaceleración. En la siguiente gráfica se puede ver la
suma de los módulos de las aceleraciones que intervienen en este proceso.
Figura 36 – Prueba caída hacia adelante

Arquitectura y desarrollo del sistema
50
50
En la gráfica anterior se puede comprobar que la magnitud de la suma de los módulos de las aceleraciones del
impacto del individuo llega a tener picos de hasta 16g, y que tras este primer impacto se suceden varios
impactos más en el descenso vertical del individuo.
En las siguientes dos gráficas se muestra la aceleración en el caso de una caída hacia atrás del individuo,
quedando claramente definidas cada una de las fases de la caída.
Figura 37 – Prueba caída hacia adelante aceleración total
Figura 38 – Prueba caída hacia atrás

51
51 Sistema de seguridad para personas dependientes
En esta última grafica se puede ver que es una caída más limpia que la caída mostrada anteriormente, pues en
este caso el individuo describe una trayectoria vertical descendente limpia hacia el pavimento, este caso se
asimilaría mucho a un desvanecimiento repentino del individuo.
Una vez se ha tratado las caídas frontal y hacia atrás, simulamos las caídas laterales, en una primera gráfica se
muestra una caída lateral de carácter leve, esta caída la asemejamos por condiciones a una caída desde una silla
o similar de forma indirecta, es decir, no tratándose de un desplome lateral hacia el suelo, sino que el individuo
Figura 39 –Prueba caída hacia atrás aceleración total
Figura 40 - Prueba caída lateral leve

Arquitectura y desarrollo del sistema
52
52
trata de parar su caída o algún objeto frena su trayectoria vertical descendente.
Como se puede comprobar en la imagen es una caída lateral leve hacia la derecha, esto se puede deducir de las
aceleraciones del eje z y el eje y que según están orientados los ejes del sistema de coordenadas se produce una
desaceleración en un caso y una aceleración en el otro.
En esta segunda grafica se puede comprobar que la suma de los módulos de las aceleraciones tiene un pico en
5.6g, una caída de leve impacto en el caso de que el individuo fuera una persona joven pero que en el caso de
un anciano podría producir una rotura de hueso.
En las siguientes dos graficas se verá las respuesta en aceleración a una caída lateral izquierda, siendo esta
caída de una magnitud considerable.
Figura 41 - Prueba caída lateral leve aceleración total

53
53 Sistema de seguridad para personas dependientes
Como se puede ver en la gráfica el individuo cae lateralmente desde una posición erguida, produciéndose una
caída donde el mayor impacto se produce en el eje y pero también tiene un impacto de gran magnitud el eje z
finalmente como se puede comprobar el individuo queda inconsciente en el suelo en una posición hacia arriba
pero levemente inclinado hacia el lado.
Figura 43 – Prueba caída lateral aceleración total
A partir de estas cuatro simulaciones, hemos visto las posibles caídas que se pueden producir en este entorno,
siendo los demás tipos de caídas una combinación de las 4 descritas anteriormente.
Una vez descritos los casos en los que el algoritmo debería dar un caso positivo de caída, se va a describir las
Figura 42 - Prueba caída lateral

Arquitectura y desarrollo del sistema
54
54
situaciones cotidianas que debería detectar el sistema como falso positivo, para diferenciarlos de los
verdaderos positivos compararemos distintos parámetros como magnitud de aceleraciones, fases de la caída,
tiempos, etc.
En el caso de acostarse en una cama, se puede decir que se producen una serie de aceleraciones que pueden
llevar a la confusión a nuestro sistema, para evitar esta situación se analizarán los resultados de la respuesta en
Figura 44 – Prueba acostarse en una cama
Figura 45 – Prueba acostarse en una cama aceleración total

55
55 Sistema de seguridad para personas dependientes
aceleración en esta situación.
Podemos observar en la gráfica anterior que la variación de las aceleraciones son mucho más suaves que en el
contexto de una caída, pues en una situación de control nuestros músculos ejercen una desaceleración(gracias a
las fuerzas aplicadas por nuestros músculos) con respecto a la aceleración vertical de la gravedad que se
produce en una caída libre.
En esta segunda gráfica se puede observar que tampoco se cumplen las fases habituales de una caída pues no
existe una fase de caída libre pues como se puede observar la suma de los módulos de las aceleraciones
siempre son superiores a 0.8g, y no se llega a producir un impacto de magnitud considerable pues la suma de
los módulos de las aceleraciones nunca superan los 2.2g.
Otra de las acciones cotidianas que pueden suponer un falso positivo que se estudiará será la acción de sentarse
en una silla.
Como se puede observar en la gráfica anterior en ningún momento se cumple la primera fase de caída libre
que se puede suponer que habría en una caída, en este caso como en el anterior se produce dentro de una
situación de control por parte del individuo que gracias a su fuerza muscular reducirá la aceleración vertical
producida por la gravedad paulatinamente, lo que a su vez llevara a un impacto de magnitud reducida que no
estará dentro del rango en el que se considera que existe una caída.
Figura 46 – Prueba sentarse en una silla

Arquitectura y desarrollo del sistema
56
56
Como se puede observar en la gráfica anterior, esta prueba tiene un pico cercano a los 3g en el momento que el
individuo impacta con la silla de forma controlada y un mínimo de entorno a los 0.6 g que se corresponde al
momento en el que el individuo se deja caer suavemente sobre la silla.
El último posible falso positivo que se analizará será el acto de bajar unas escaleras, que puede ser el más
problemático pues en caso de bajarlas con cierta habilidad se produciría un notable impacto contra el
pavimento.
Figura 47 - Prueba sentarse en una silla aceleración total
Figura 48 - Prueba bajar escaleras

57
57 Sistema de seguridad para personas dependientes
Como se puede observar en la gráfica esta prueba es la que más dificultades puede dar a la hora de
considerarse un falso positivo, pues existen breves momentos en los que el movimiento del individuo se
aproximan a la caída libre, llegando a estar en valores inferiores a los 0.5g la aceleración en el eje x que es en
este caso la que soporta la aceleración gravitacional pues es la que está alineada con el individuo erguido. Tras
esta fase de caída libre se pueden observar picos de una magnitud considerable, estos picos de magnitud se
pueden cuantificar mejor en la próxima grafica que se muestra la suma de los módulos de las aceleraciones.
Como se puede observar en la prueba se bajan cuatro escalones en los que las magnitudes de las respuesta de
aceleración ante el impacto varían en el rango entre 2.3g y 3.5 g.
Después de obtenerse los resultados de las distintas pruebas, evaluando las fases que deben producirse y los
rangos de las respuestas en aceleración ante los impactos, se puede decir que tenemos los rangos admisibles de
un evento de caída para poder aplicar estos datos obtenidos a la consecución de un algoritmo de detección de
caídas.
Finalmente se va a añadir una prueba para poder aportar más información al algoritmo, y poder determinar tras
la caída si el individuo se encuentra consciente o no. Esta prueba consiste en que el individuo se levante desde
el suelo tras una caída, y se muestran las graficas de los resultados obtenidos a continuación.
Figura 49 - Prueba bajar escaleras aceleración total

Arquitectura y desarrollo del sistema
58
58
Se puede observar en la gráfica que tras varios intentos de levantarse, el individuo consigue levantarse en el
pico de aceleración de 3.3g, tras la caída con que haya cierto movimiento como el que se observa a partir del
segundo 7 se puede considerar que el individuo está consciente.
Figura 50 - Prueba levantarse tras caída
Figura 51 – Prueba levantarse tras caída

59
59 Sistema de seguridad para personas dependientes
5.4.1.3 Diseño del algoritmo de caídas
Una vez obtenidos todos los resultados de las pruebas y con el conocimiento de cada una de las fases de la
caída podemos diseñar el algoritmo de caídas, en la siguiente tabla se muestra con los umbrales que se
trabajará en el posterior algoritmo, del que se muestra su diagrama de flujo a continuación.
Caídas Umbral Valor
Umbral Caída Libre 0 g
Tiempo Max Caída libre 1 s
Umbral Impacto 4 g
Rango Reposo [0.5,2] g
Umbral Levantarse 2 g
Tiempo Levantarse 15 s
Tabla 12 – Umbrales de caídas

Arquitectura y desarrollo del sistema
60
60
Figura 52 – Diagrama de flujo algoritmo de caídas

61
61 Sistema de seguridad para personas dependientes
La función correspondiente al algoritmo anterior, estará situada en el algoritmo principal del proyecto, que
proveerá en cada ciclo de reloj a la función de nuevos valores de aceleración y del estado de la misma. A
continuación se muestra el código correspondiente a dicho algoritmo.
int funcioncaida(int16_t acelx,int16_t acely,int16_t acelz,int16_t estado){
int16_t aceltotal;
aceltotal= abs(acelx)+abs(acely)+abs(acelz);//Se calcula la suma del modulo
de las acelaraciones
if((aceltotal==0)&& (estado==REPOSO))//comprobamos si se ha producido caida
libre
{
estado=CAIDALIBRE;
}
if((estado==CAIDALIBRE)&& (aceltotal>=4))//si la acelaracion total supera
modulo 4 entra en el estado de deteccion de impacto
{
counter=millis();
estado=ESPERATRASIMPACTO;
Serial.println("IMPACTO FUERTE,ATENCION");
}
if(estado==ESPERATRASIMPACTO)
{
if((aceltotal>=0.5)&&(aceltotal<=2))//estado de reposo tras caida,
{
delay(2000);//tiempo para que se estabilice la señal y poder determinar
los efectos de la caida
estado=PRESMS;
}
}
if(estado==PRESMS)//en este estado se valora si ha sido una caida en la
que el usuario a quedado inscosciente o se ha levantado tras la caida, si en
15 seg no se levanta se activa protocolo de emergencia
{
if(aceltotal>=2)
{
estado=SMS;// se ha levantado
}
else if (aceltotal<2)
{
if (counter > millis()) counter = millis();
if (millis() - counter > 15000)
{
counter=millis();
estado=SMSINS; //no se ha levando
}
}
}
if(estado==SMS)//envia sms a numero de contacto

Arquitectura y desarrollo del sistema
62
62
{
Serial.println("SMS ENVIADO A JUAN,la victima esta consciente");
delay(3000);
estado= REPOSO;
}
if(estado==SMSINS)//envia sms a numero de contacto y a emergencias ,
victima insconsciente
{
Serial.println("SMS ENVIADO A JUAN y 112 ,ALERTA la victima no esta
consciente");
delay(3000);
estado= REPOSO;
}
return estado;
}
En este código se usa una sola variable global, la variable counter, que sirve como contador temporal, las
demás variables están definidas con carácter local dentro de la función. También comentar que el uso del
puerto serie dentro de la función es solo de carácter verificativo, pues en el envío del sms de alerta se hace
fuera de esta función y a través del modulo GSM.
5.4.2 Algoritmo de localización
Unos de los objetivos del proyecto es implementar un algoritmo, que partiendo de los datos de posición, pueda
detectar la presencia del individuo dentro de determinadas zonas. Estas zonas se seleccionarán en función del
desarrollo de la vida habitual del individuo, con distintos niveles de seguridad y teniendo como referencia la
vivienda habitual del individuo.
A partir de los datos de posicionamiento, la longitud y la latitud, se pueden definir áreas dentro del globo
terrestre. La magnitud de cada una de las áreas es de vital importancia para las aproximaciones que se llevan a
cabo en el proyecto, pues son áreas dentro de un rango desde un mínimo de una hectárea hasta un máximo de
varios kilómetros cuadrados. Este rango nos permite aproximar los meridianos y paralelos como líneas rectas
respecto a la superficie que se quiere acotar. Puesto que el meridiano terrestre mide 40008 Km, y este son 360
grados, un grado de latitud representa aproximadamente 111.11 km. Por ello puesto que se trabaja en el rango
definido anteriormente, esto se convierte en grados en milésimas de grado, puesto que 0.001 grado latitud =
0.1111 km, aplicando una regla de tres se obtiene que 100 metros es igual a 0.0009 grados de latitud
Respecto a los paralelos la cosa es más complicada ya que no todos lo paralelos tienen el mismo radio .En la
tierra, el paralelo de mayor radio es el Ecuador y según se te van acercando los paralelos a los polos la longitud
de los paralelos disminuye. En cualquier paralelo el radio del mismo es igual al coseno del ángulo
correspondiente multiplicado el radio de la tierra en el ecuador (6376 km) .Se puede tomar como ejemplo el
paralelo 0, tenemos que 0 1cos
, por lo tanto el radio del Ecuador será 6376, y en el polo norte o el polo
sur ese radio seria 0, debido a que 90 0cos
y que el 90 0cos
. Puesto que estamos en el
hemisferio norte, y en el caso que se está tratando la latitud esta próxima a los 37º se tomará ese paralelo para
el cálculo de la distancia a la que corresponde un grado de longitud. Por tanto el radio del paralelo será
37 *( ) 5092.100;cos Radio en el ecuador e introduciendo el resultado en la fórmula de la longitud
de la circunferencia, queda 2 31994.608;r ahora se divide entre 360 grados que son una circunferencia y
se tiene que cada grado son 88.874 km. Así pues 0.001 grado de longitud = 0.0888 km, realizando una regla de
tres se obtiene que 100 metros es igual a 0.0011 grados de longitud.

63
63 Sistema de seguridad para personas dependientes
Por lo detallado anteriormente, el algoritmo se basará en áreas rectangulares que serán acotadas por cuatro
puntos, una longitud máxima y una mínima, y una latitud máxima y una mínima. En el caso de la Zona 1 será
una zona de seguridad alrededor del lugar de residencia del individuo, con un área de una hectárea. Se trata de
la primera zona de seguridad para detectar las salidas del individuo de su lugar de residencia para mantener
cierto control de las salidas del individuo. En la siguiente imagen se muestra la zona 1 de seguridad que sea
tomado en este proyecto, pudiendo esta variar conforme a los requisitos demandados.
Como se puede ver en la imagen anterior esta zona una está delimitada por el cuadrado exterior de lado 100
Figura 53 – Meridianos y paralelos
Figura 54- Zona de seguridad 1

Arquitectura y desarrollo del sistema
64
64
metros, así pues se tendrá un área de seguridad de una hectárea entorno al lugar de residencia habitual del
individuo.
Tras la elección de una primera zona de seguridad alrededor de la vivienda del individuo, se va a acotar una
segunda zona que abarca desde la primera hasta unos límites exteriores marcados por la zona 2. En este caso
estos límites van establecidos a elección del demandante, así pues en el algoritmo se tomará como zona 2 el
barrio de residencia del individuo.
Como se puede ver en la imagen anterior la zona 2 es una zona de relativa seguridad alta para el individuo,
pero conviene estar alerta cuando pase de la zona 1 a la 2. En este caso la zona 2 tiene un área de 16 Hectáreas
y abarca el barrio del individuo.
En la siguiente imagen se muestra en la próxima imagen la zona 3, esta zona delimita el área de seguridad
estable del individuo, a partir de esta área el individuo corre un riesgo considerable.
Figura 55 – Zona de seguridad 2

65
65 Sistema de seguridad para personas dependientes
Como se ve esta área es aproximadamente el área de la población donde reside el individuo, se puede acotar
más este área si fuera necesario, la facción de área mínima que tenemos en cuenta en la hectárea, así pues se
puede formar hectárea por hectárea las distintas zonas requeridas si fuera necesario.
Por último se detalla la superposición de las distintas zonas de seguridad.
Figura 56 – Zona de seguridad 3

Arquitectura y desarrollo del sistema
66
66
Una vez se ha detallado el proceso de selección de zonas, y cómo se han seleccionado en el caso de este
proyecto, se va a implementar el algoritmo que a partir de las entradas de longitud y latitud del GPS distingue
en la zona que se encuentra el individuo. A continuación se muestra el código de la función que lleva a cabo
esa tarea:
Figura 57 – Zonas de seguridad

67
67 Sistema de seguridad para personas dependientes
//ZONAS LIMITADAS
#define HOMELAT 36.57600
#define HOMELON -6.21950
#define LIMITEALTLATZ1 36.57645
#define LIMITEBAJLATZ1 36.57555
#define LIMITEALTLONZ1 -6.21895
#define LIMITEBAJLONZ1 -6.22005
#define LIMITEALTLATZ2 36.5778
#define LIMITEBAJLATZ2 36.5742
#define LIMITEALTLONZ2 -6.2173
#define LIMITEBAJLONZ2 -6.2218
#define LIMITEALTLATZ3 36.5850
#define LIMITEBAJLATZ3 36.5679
#define LIMITEALTLONZ3 -6.214
#define LIMITEBAJLONZ3 -6.2250
int funcionlocaliza(int estado)
{
if(estado>=10)
{
estado=estado-10;//si en el anterior ciclo hubo un envio de sms,
el valor de estado vuelve a su valor normal para que no salte como que ha
cambiado su valor
}
int estadoant=estado;
if (GPS.fix) {
if(((GPS.latitudeDegrees<= LIMITEALTLATZ1) &&
(GPS.latitudeDegrees>=LIMITEBAJLATZ1))&&((GPS.longitudeDegrees<=LIMITEALTLONZ
1)&&(GPS.longitudeDegrees>=LIMITEBAJLONZ1)))
{
estado=1;
if(estadoant!=estado)
{
Serial.print(F("Dentro de Zona :"));
Serial.println(estado);
estado=11;//Si cambia el estado le añadimos un uno al
estado para detectar que hay que enviar un sms
}
}
else if(((GPS.latitudeDegrees <= LIMITEALTLATZ2) &&
(GPS.latitudeDegrees>=LIMITEBAJLATZ2))&&((GPS.longitudeDegrees<=LIMITEALTLONZ
2)&&(GPS.longitudeDegrees>=LIMITEBAJLONZ2)))
{
estado=2;
if(estadoant!=estado)
{
Serial.print(F("Dentro de Zona :"));
Serial.println(estado);
estado=12;//Si cambia el estado le añadimos un uno al
estado para detectar que hay que enviar un sms

Arquitectura y desarrollo del sistema
68
68
}
}
else if(((GPS.latitudeDegrees <= LIMITEALTLATZ3) &&
(GPS.latitudeDegrees >= LIMITEBAJLATZ3))&&((GPS.longitudeDegrees <=
LIMITEALTLONZ3)&&(GPS.longitudeDegrees >=LIMITEBAJLONZ3)))
{
estado=3;
if(estadoant!=estado)
{
Serial.print(F("Dentro de Zona :"));
Serial.println(estado);
estado=13;//Si cambia el estado le añadimos un uno al
estado para detectar que hay que enviar un sms
}
}
else
{
estado=4;
if(estadoant!=estado)
{
Serial.print(F("Dentro de Zona Peligrosa, Alerta"));
estado=14;//Si cambia el estado le añadimos un uno al
estado para detectar que hay que enviar un sms
}
}
estadoant=estado;
}
return estado;
}
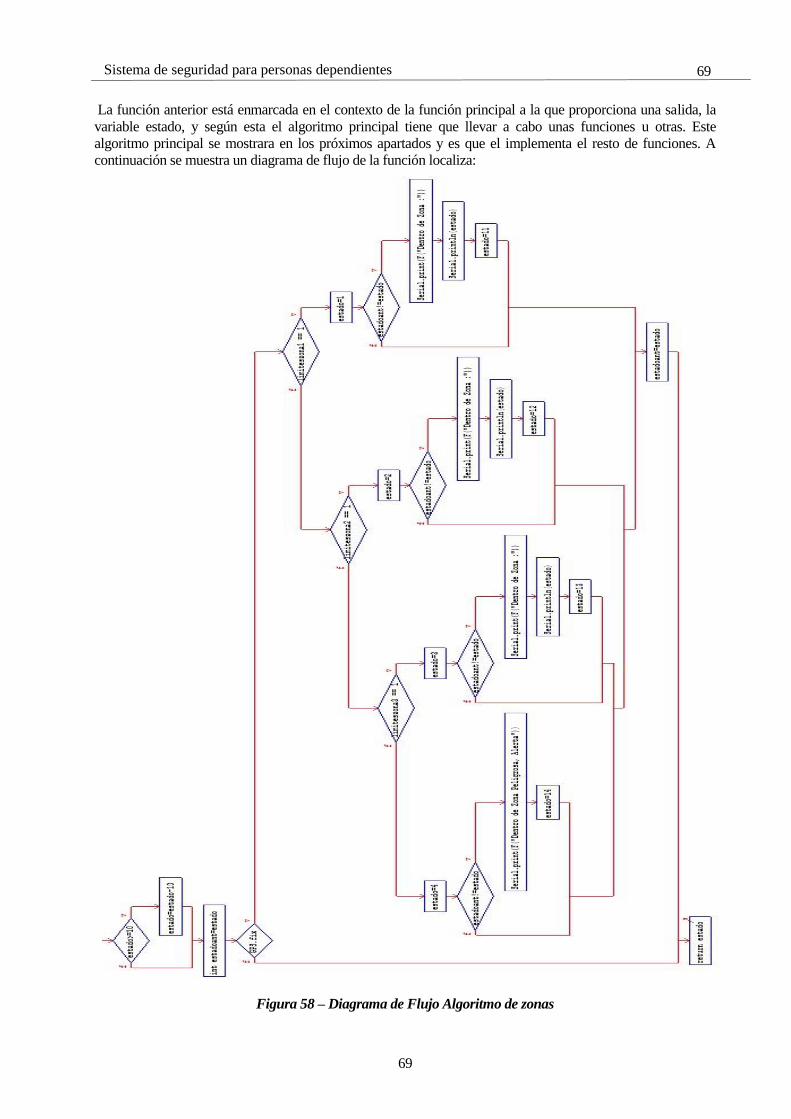
69
69 Sistema de seguridad para personas dependientes
La función anterior está enmarcada en el contexto de la función principal a la que proporciona una salida, la
variable estado, y según esta el algoritmo principal tiene que llevar a cabo unas funciones u otras. Este
algoritmo principal se mostrara en los próximos apartados y es que el implementa el resto de funciones. A
continuación se muestra un diagrama de flujo de la función localiza:
Figura 58 – Diagrama de Flujo Algoritmo de zonas

Arquitectura y desarrollo del sistema
70
70
5.4.3 Algoritmo de envío de SMS
Para el envío de SMS se recurre a un algoritmo basado en los comandos AT, que se explicaron en apartados
anteriores. Este algoritmo recibe una cadena de caracteres que es parte de la información que se va a transmitir
en el mensaje además se transmite la última posición valida del individuo junto con la hora a la que fue
enviada desde el modulo GPS dicha posición.
int enviosms(char cadena[])
{
digitalWrite(SMSLED_PIN, HIGH);
mySerialGSM.print(F("AT+CFUN=1\r\n"));
delay(10000);
mySerialGSM.print(F("AT+CLIP=1\r\n")); //Activar alarma llamada
delay(1500);
mySerialGSM.print(F("AT+CMGF=1\r\n")); //Activar modo texto
delay(1500);
mySerialGSM.print(F("AT+CMGS=\"664513107\"\r\n")); //Comando AT enviar SMS
delay(1000);
mySerialGSM.println(cadena);
mySerialGSM.println(F("estoy en:"));
mySerialGSM.print(F("\"https://www.google.es/maps/search/"));
mySerialGSM.print(latitudult,4);
mySerialGSM.print(F("%2C"));// es una coma codificada
mySerialGSM.print(longitudult,4);
mySerialGSM.println(F("\""));
mySerialGSM.println(F("Hora de ultima localizacion:"));
mySerialGSM.print(horault+1, DEC);
mySerialGSM.print(":");
if(minutoult<=9&&minutoult>=0){mySerialGSM.print("0");}
mySerialGSM.print(minutoult, DEC);
mySerialGSM.print(":");
if(segundoult<=9&&segundoult>=0){mySerialGSM.print("0");}
mySerialGSM.println(segundoult, DEC);
//Mensaje
delay(1000);
mySerialGSM.print(F("\x1A")); //Enviar ascii SUB
delay(1000);
digitalWrite(SMSLED_PIN, LOW);
mySerialGSM.print(F("AT+CFUN=0\r\n"));
return 0;
}
Este código simplemente escribe en el modulo GPS las ordenes adecuadas para que envie un sms con los datos
necesarios, a su vez enciende un led de aviso de que se está enviando un sms.
5.4.4 Algoritmo principal
El algoritmo principal es el encargado de centralizar todos los datos obtenidos y por medio de las variables
globales “estadoppal” para las caídas y “estadoposicion” para la localización, administra el envío de SMS de

71
71 Sistema de seguridad para personas dependientes
emergencia, indicando en qué casos deben enviarse a través de la función “enviosms” vista en el apartado
anterior.
#include <Adafruit_GPS.h>
#include <SoftwareSerial.h>
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050.h"
#define A_R 16384.0
#define G_R 131.0
#define GPSECHO true
#define LED_PIN 13
#define SMSLED_PIN 4
//ESTADOS DEL PROCESO DE CAIDA
#define REPOSO 0
#define CAIDALIBRE 1
#define IMPACTO 2
#define ESPERATRASIMPACTO 3
#define PRESMS 4
#define SMS 5
#define SMSINS 6
//ZONAS LIMITADAS
#define HOMELAT 36.57600
#define HOMELON -6.21950
#define LIMITEALTLATZ1 36.57645
#define LIMITEBAJLATZ1 36.57555
#define LIMITEALTLONZ1 -6.21895
#define LIMITEBAJLONZ1 -6.22005
#define LIMITEALTLATZ2 36.5778
#define LIMITEBAJLATZ2 36.5742
#define LIMITEALTLONZ2 -6.2173
#define LIMITEBAJLONZ2 -6.2218
#define LIMITEALTLATZ3 36.5850
#define LIMITEBAJLATZ3 36.5679
#define LIMITEALTLONZ3 -6.214
#define LIMITEBAJLONZ3 -6.2250
int16_t ax, ay, az;
int inPin = 7; // pin 7 asignado para el pulsador
int16_t estadoppal=REPOSO;
uint32_t counter = millis();
int estadoposicion=1;//inicializamos en zona 1(Zona segura)
float latitudult=HOMELAT;
float longitudult=HOMELON;
uint8_t horault;
uint8_t minutoult;
uint8_t segundoult;
uint32_t timer = millis();
bool blinkState = false;
SoftwareSerial mySerial(3, 2);
SoftwareSerial mySerialGSM(10, 11); // RX, TX
MPU6050 accelgyro;//declaracion funcion obtencion datos acelerometro
Adafruit_GPS GPS(&mySerial);// Declaracion funcion GPS y asignación de
puertos 3 y 2 digitales para transmision serie
int funcioncaida(int16_t acelx,int16_t acely,int16_t acelz);

Arquitectura y desarrollo del sistema
72
72
int funcionlocaliza(int estado);
int enviosms(char cadena[]);
//rutinas de interrupcion que se usan para obtener los datos del GPS
boolean usingInterrupt = false;
void useInterrupt(boolean);
void setup()
{
Wire.begin();
Serial.begin(115200);
mySerialGSM.begin(9600);
accelgyro.initialize();
Serial.println(accelgyro.testConnection() ? F("MPU6050 connection
successful") : F("MPU6050 connection failed"));
pinMode(LED_PIN, OUTPUT);//Configura el pin 13 como salida
pinMode(SMSLED_PIN, OUTPUT);//Configura el pin del ledsms como salida
//ahora inicializamos el GPS
GPS.begin(9600);// 9600 NMEA es la velocidad estándar del puerto serie
GPS
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCONLY);// Consufiguramos el Gps
para que envie solo la sentencia minima recomendada NMEA
GPS.sendCommand(PMTK_SET_NMEA_UPDATE_1HZ); // Configuramos para que
tenga una tasa de descarga de datos de 1 Hz
GPS.sendCommand(PGCMD_ANTENNA);//Para obetener el estado de la antena
useInterrupt(true);
delay(1000);
mySerial.println(PMTK_Q_RELEASE);
}
void loop()
{
//COMPROBAMOS CAIDAS Y SE ENVIA SMS EN CASO DE QUE SEA NECESARIO---------
-----------------------------------------------------------------------------
------------------------------------
accelgyro.getAcceleration(&ax, &ay, &az);//actualizamos los datos del
acelerometro
estadoppal=funcioncaida(4*(ax/A_R),4*(ay/A_R),4*(az/A_R),estadoppal);
// Refrescamos si se ha recibido algun dato nuevo del GPS, despues
actualizamos estado de zona donde esta, y en caso de que cambie de zona se
envia sms------------------------------------
if (GPS.newNMEAreceived()) {
if(GPS.fix){
latitudult=GPS.latitudeDegrees;
longitudult=GPS.longitudeDegrees;
horault=GPS.hour;
minutoult=GPS.minute;
segundoult=GPS.seconds;
}
if (!GPS.parse(GPS.lastNMEA()))
return;
}
estadoposicion=funcionlocaliza(estadoposicion);

73
73 Sistema de seguridad para personas dependientes
if(estadoposicion==11)//estado de envio de sms porque han cambiado a la
zona 1
{
enviosms("El individuo vuelve a la zona 1, zona segura\0");
}
else if(estadoposicion==12)//estado de envio de sms porque han cambiado a
la zona 2
{
enviosms("Aviso, El individuo está actualmente en la zona 2, zona
seguridad intermedia\0");
}
else if(estadoposicion==13)//estado de envio de sms porque han cambiado a
la zona 3
{
enviosms("Alerta, El individuo está actualmente en la zona 3, zona no
segura\0");
}
else if(estadoposicion==14)//estado de envio de sms porque han cambiado a
la zona de alerta
{
enviosms("Alerta, El individuo está actualmente fuera de la zona de
control, zona peligrosa\0");
}
// Se comprueba si el pulsador esta pulsado durante mas de 2 segundos------
-----------------------------------------------------------------------------
---------------------------------------
if (digitalRead(inPin) == HIGH) // testea si la entrada esta activa HIGH
{
delay(2000); // espera 2 segundo
if (digitalRead(inPin) == HIGH)
{
enviosms("Alerta, Pulsador de emergencia apretado\0");
}
}
}

Arquitectura y desarrollo del sistema
74
74
La función consta de dos partes una primera en la que se configuran los distintos parámetros de inicio de las
distintas comunicaciones y dispositivos, y la segunda que es bucle constante que es donde se desarrollan las
acciones principales del algoritmo.
En cada uno de estos bucles comprueba el estado del sistema y actualiza los datos que proceden de los
dispositivos, y tras la actualización llama a las funciones pertinentes que serán las que cambien el estado del
sistema en caso de que se cumplan una serie de condiciones impuestas por la función. Finalmente se muestra
el diagrama de flujo de la función principal
Figura 59 – diagrama de flujo algoritmo principal

75
75 Sistema de seguridad para personas dependientes
6 RESULTADOS
Science and technology revolutionize our lives, but memory, tradition
and myth frame our response
Arthut Schelsinger
Para comprobar el correcto funcionamiento del sistema integrado, se han realizado una serie de pruebas con el
dispositivo llevado por una persona a modo de cinturón en su costado. Para verificar el resultado de las
pruebas, el individuo además del sistema, lleva un teléfono móvil android con capacidad para recibir SMS y
con conexión 4G lo que facilitara la obtención de la posición del individuo.
La prueba inicial que se ha llevado a cabo es la pulsación del botón de emergencias dentro de la casa del
individuo, esta pulsación se hará tras haber encendido el sistema a los aproximadamente 10 segundos, así pues
no debe de dar tiempo al GPS a situarse, además de por estar en un situación de cobertura medio-baja como es
un techo interior por no tener tiempo suficiente para cuadrar la señal. En este caso se debe de recibir un SMS
alertando de la pulsación del botón y puesto que no se ha tomado ninguna posición debería de indicarse la
posición base e indicar que como se ha configurado por defecto el último dato recibido del GPS fue a las
1:00:00. Los resultados de esta prueba son satisfactorios como se comprueba en las siguientes imágenes.
Figura 60 – SMS pulsador

Resultados
76
76
Tras verificar el funcionamiento en interiores la siguiente prueba testeará el detector de caídas en una situación
cotidiana de un paseo. Se trata de una caída leve tras la que el individuo se encuentra en estado de consciencia.
Los resultados obtenidos son correctos pues se obtiene un SMS indicando la situación de caída, el estado de
consciencia y la posición y hora del evento ocurrido.
Se recibe el mensaje pasados unos 20 segundos aproximadamente desde la caída, con la posición exacta de la
caída y la hora del suceso.
La siguiente prueba que se llevara a cabo será un conjunto de acciones que pondrá a prueba nuestro sistema.
En un primer momento el individuo se encuentra sentado y tras levantarse de su silla y comprobar que el
estado del sistema es el correcto se aproxima a bajar unas escaleras de 12 peldaños, tras bajar esta escalera y
comprobar que el estado es correcto va a iniciar un paseo por cada uno de las Zonas establecidas de seguridad,
acabando finalmente fuera de la zona de control, tras esto el individuo volverá al punto de partida.
Una vez a salido de la casa y a pesar de que las condiciones meteorológicas son adversas pues hay cielos
nublados, el dispositivo tarda unos 15 seg en localizar la señal GPS, cuando localiza la señal el individuo
todavía se encuentra en la zona 1 pero segundos después rebasara el límite establecido de esta zona por lo que
se recibirá un SMS como que el que se muestra en la Figura 62.
Figura 61 – SMS caída
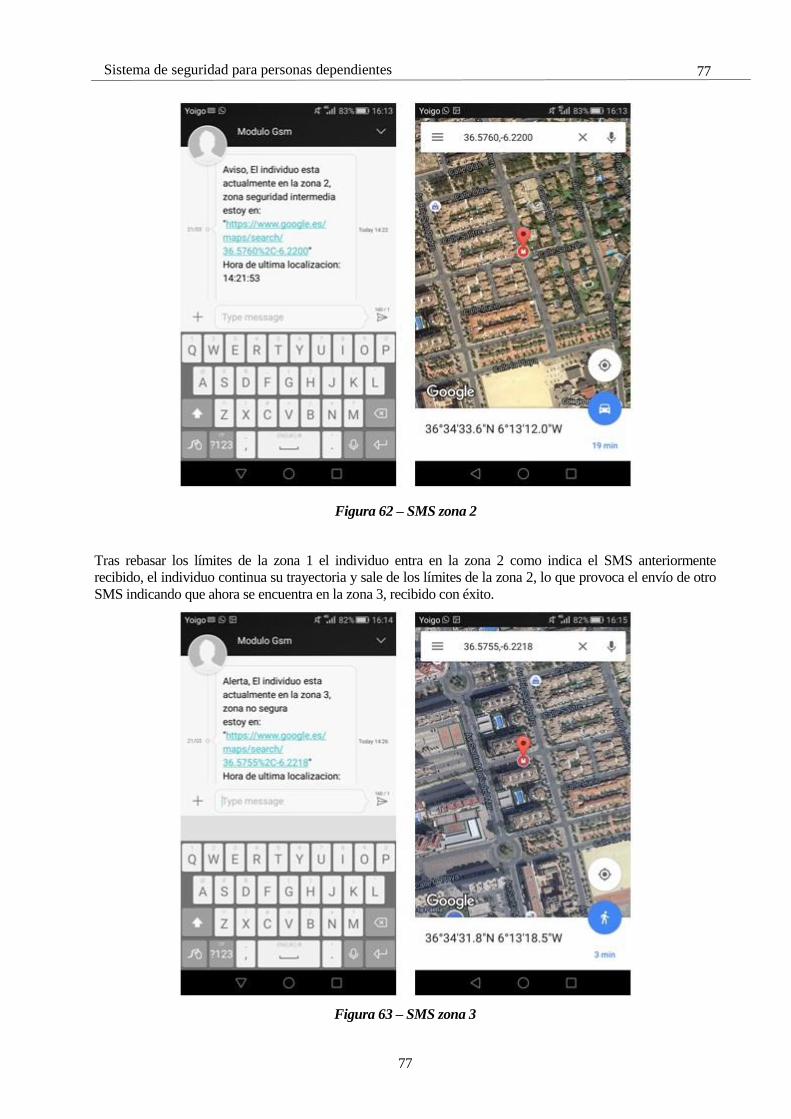
77
77 Sistema de seguridad para personas dependientes
Tras rebasar los límites de la zona 1 el individuo entra en la zona 2 como indica el SMS anteriormente
recibido, el individuo continua su trayectoria y sale de los límites de la zona 2, lo que provoca el envío de otro
SMS indicando que ahora se encuentra en la zona 3, recibido con éxito.
Figura 63 – SMS zona 3
Figura 62 – SMS zona 2

Resultados
78
78
Tras comprobar con éxito la recepción del mensaje se continúa la trayectoria y ahora una vez se han rebasado
los límites de seguridad de la zona 3, última zona de control, se recibe un mensaje alertando de que el
individuo ha sobrepasado estos límites y se aproxima a los límites de la ciudad o pueblo.
Tras la comprobación de las limitaciones de todas las zonas, el individuo vuelve al punto de partida, que es la
zona 1 recibiendo por último el mensaje que se muestra a continuación.
Figura 64 – SMS zona peligrosa

79
79 Sistema de seguridad para personas dependientes
La prueba anterior es el ejemplo del correcto funcionamiento del dispositivo pues se realiza un análisis
completo de las funciones del dispositivo respondiendo este positivamente a todas ellas. La integración de los
módulos del dispositivo se ha realizado de manera acertada pues responde perfectamente a sus funciones el
dispositivo diseñado.
Figura 65 – SMS vuelta a zona 1

Conclusiones
80
80
7 CONCLUSIONES
Genius is one percent inspiration and ninety-nine percent perspiration
Thomas Edison
El objetivo del proyecto era la implementación y diseño de un sistema de posicionamiento humano para
seguridad y dependencia, se buscaba un sistema que integrara GPS, IMU y GSM para obtener un dispositivo
de bajo coste y gran autonomía. Tras una exhaustiva búsqueda en el mercado se seleccionaron los distintos
módulos elegidos buscando una relación calidad precio competente. A continuación se hace balance de los
objetivos planteados y el grado de consecución de los mismos.
El primer objetivo del proyecto era a través del acelerómetro del IMU obtener los datos de forma ordenada a
través del protocolo de comunicación I2C, y tras la obtención de estos datos a una frecuencia de muestreo
seleccionada previamente poder detectar las caídas en un individuo. Este objetivo se ha conseguido con éxito
pues como se ha expuesto en esta memoria este algoritmo funciona correctamente tanto en casos de caídas
como en caso de “falsas caídas” como puede ser la bajada de unas escaleras.
Otro objetivo primordial era la obtención de los datos de posición para la elaboración de un algoritmo de zonas
de seguridad. La comunicación con el Ultimate GPS de Adafruit y la obtención de los datos de
posicionamiento, se consiguen con una comunicación UART TTL con la placa Arduino que a través de las
librerías elaboradas para tal fin obtiene los datos de posición de forma ordenada. Una vez obtenemos los datos
de posición con una frecuencia de 1Hz, se implementa un algoritmo de zonas que nos indica en que zona se
encuentra el individuo, así como el grado de seguridad de la zona correspondiente. Este objetivo se ha
conseguido con éxito pues las pruebas realizadas así lo ponen de manifiesto.
El tercer objetivo era conseguir enviar los SMS a través de la placa GSM, a través del envío de códigos AT
desde la placa Arduino. Una vez conocidos los códigos AT se implementó un código por el cual enviaba un
SMS a los números indicados con los diversos datos de seguridad correspondientes.
El objetivo principal del proyecto era la implementación de todos los módulos en el dispositivo añadiendo a
este un botón pulsador de emergencia. Este objetivo se lleva a cabo con la creación de un código principal de
Arduino que elimina los problemas de sincronización entre los dispositivos configurándolos
convenientemente. El correcto funcionamiento del dispositivo integrado avala la consecución de este objetivo,
como se puede comprobar en el apartado anterior.
Finalmente, una de las intenciones de este proyecto era elaborar un dispositivo al alcance de prácticamente
cualquier consumidor. Al ser este proyecto un prototipo se debe tener en cuenta que este no sería su precio en
el mercado pues se ha optado por obtener los productos en empresas distribuidoras nacionales, y en pequeñas
unidades, lo que eleva el coste del producto. A continuación se muestra un presupuesto total del sistema.

81
81 Sistema de seguridad para personas dependientes
Descripción Unidades Precio unidad Subtotales
Arduino Uno Rev3 1 20 € 20 €
Modulo GSM lonet 1 32.92 € 32.92 €
MPU 9150 1 12.26 € 12.26 €
GPS Adafruit 1 35.19 € 35.19 €
Batería LiPo 7.4V 1 14.95 € 14.95 €
Step Down DC-DC 1 5.50 € 5.50 €
Pulsador 1 1.45 € 1.45 €
Varios (LED, res,etc.) 1 0.90 € 0.90 €
TOTAL - - 123.17€
Tabla 13 - Presupuesto

Conclusiones
82
82

83
83 Sistema de seguridad para personas dependientes
REFERENCIAS
[1] IMSERSO, "Informe 2012, Las personas mayores en España" Colección de documentos, Primera
edición. 2014.
[2] Juan López Doblas, "Personas mayores viviendo solas" Colección de estudios, IMSERSO,Primera
edicion. 2005.
[3] Antonio Abellan García, "Un perfil de las personas mayores en España,2015", revista,Informes
envejecimiento en red. 2015.
[4] Damian Rivas Rivas y Rafael Vazquez Valenzuela, "Apuntes Navegación aérea" Apuntes, Universidad
de Sevilla, Departamento de Ingeniería Aeroespacial. 2015
[5] José María Hernando Rábanos, "Transmision por radio", Edictorial universitaria Ramón Areces, Sexta
edición. Marzo 2008.
[6] Alejandro Vázquez Fraga,"Integración mediante Filtro de Kalman de sensores inerciales y GPS para la
estimacion de la posicion de un vehículo" TFG. Septiembre ,2014.
[7] Miguel Ángel Indurain Yubero, "Sistema Didáctico para las prácticas de microcontroladores basados en
un dispositivo GPS" TFG. 2014.
[8] Ramiro Blanco y Alejandra Hoyos, "Sistema de deteccion de caida en personas de la tercera edad para
uso en centros geriatricos" Tesis. 2010.
[9] Alberto Castro Dominguez, "Sistema de control de temperatura a traves de Arduino y la tecnología
GPRS\GSM"PFC. 2011.

Referencias
84
84
[10] Manuales y datasheets de Arduino Uno Rev3 . https://www.arduino.cc/
[11] Manuales y datasheets de ATmega328p . https://www.atmel.com/
[12] Manuales y datasheets de Invensense MPU 9150 . http://www.invensense.com/products/motion-
tracking/9-axis/mpu-9150/
[13] Manuales y datasheets de Ultimate GPS Adafruit Breakout . https://www.adafruit.com/products/746
[13] Manual de SIM800L y manual de comandos AT .http://www.seeedstudio.com/wiki/LoNet_-
_GSM/GPRS_Breakout
[14] Webs:
https://github.com/sparkfun/MPU-9150_Breakout
http://blog.bricogeek.com/noticias/programacion/como-programar-arduino-con-atmel-studio-6/
https://learn.adafruit.com/adafruit-ultimate-gps/parsed-data-output
https://forum.arduino.cc
http://fritzing.org/projects/gsm-alarmanlage-motion-detect
http://www.smssolutions.net/tutorials/gsm/receivesmsat/
http://robologs.net/2014/01/12/arduino-y-matlab/

85
85 Sistema de seguridad para personas dependientes
Índice de Conceptos
86
86
Índice de Conceptos

87
87 Sistema de seguridad para personas dependientes

Glosario
88
88
Glosario

89
89 Sistema de seguridad para personas dependientes
ANEXO A: LIBRERÍAS Librería MPU 6050
// I2Cdev library collection - MPU6050 I2C device class
// Based on InvenSense MPU-6050 register map document rev. 2.0, 5/19/2011
(RM-MPU-6000A-00)
// 10/3/2011 by Jeff Rowberg <[email protected]>
// Updates should (hopefully) always be available at
https://github.com/jrowberg/i2cdevlib
//
// Changelog:
// ... - ongoing debug release
// NOTE: THIS IS ONLY A PARIAL RELEASE. THIS DEVICE CLASS IS CURRENTLY
UNDERGOING ACTIVE
// DEVELOPMENT AND IS STILL MISSING SOME IMPORTANT FEATURES. PLEASE KEEP THIS
IN MIND IF
// YOU DECIDE TO USE THIS PARTICULAR CODE FOR ANYTHING.
/* ============================================
I2Cdev device library code is placed under the MIT license
Copyright (c) 2012 Jeff Rowberg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
===============================================
*/
#ifndef _MPU6050_H_
#define _MPU6050_H_
#include "I2Cdev.h"
#include <avr/pgmspace.h>
//Magnetometer Registers
#define MPU9150_RA_MAG_ADDRESS 0x0C
#define MPU9150_RA_MAG_XOUT_L 0x03
#define MPU9150_RA_MAG_XOUT_H 0x04
#define MPU9150_RA_MAG_YOUT_L 0x05
#define MPU9150_RA_MAG_YOUT_H 0x06
#define MPU9150_RA_MAG_ZOUT_L 0x07

Glosario
90
90
#define MPU9150_RA_MAG_ZOUT_H 0x08
#define MPU6050_ADDRESS_AD0_LOW 0x69 // address pin low (GND), default
for InvenSense evaluation board
#define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC)
#define MPU6050_DEFAULT_ADDRESS MPU6050_ADDRESS_AD0_LOW
#define MPU6050_RA_XG_OFFS_TC 0x00 //[7] PWR_MODE, [6:1] XG_OFFS_TC,
[0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC,
[0] OTP_BNK_VLD
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC,
[0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR
#define MPU6050_RA_ZG_OFFS_USRL 0x18
#define MPU6050_RA_SMPLRT_DIV 0x19
#define MPU6050_RA_CONFIG 0x1A
#define MPU6050_RA_GYRO_CONFIG 0x1B
#define MPU6050_RA_ACCEL_CONFIG 0x1C
#define MPU6050_RA_FF_THR 0x1D
#define MPU6050_RA_FF_DUR 0x1E
#define MPU6050_RA_MOT_THR 0x1F
#define MPU6050_RA_MOT_DUR 0x20
#define MPU6050_RA_ZRMOT_THR 0x21
#define MPU6050_RA_ZRMOT_DUR 0x22
#define MPU6050_RA_FIFO_EN 0x23
#define MPU6050_RA_I2C_MST_CTRL 0x24
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
#define MPU6050_RA_I2C_SLV0_REG 0x26
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
#define MPU6050_RA_I2C_SLV4_ADDR 0x31
#define MPU6050_RA_I2C_SLV4_REG 0x32
#define MPU6050_RA_I2C_SLV4_DO 0x33
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
#define MPU6050_RA_I2C_SLV4_DI 0x35
#define MPU6050_RA_I2C_MST_STATUS 0x36
#define MPU6050_RA_INT_PIN_CFG 0x37
#define MPU6050_RA_INT_ENABLE 0x38
#define MPU6050_RA_DMP_INT_STATUS 0x39
#define MPU6050_RA_INT_STATUS 0x3A

91
91 Sistema de seguridad para personas dependientes
#define MPU6050_RA_ACCEL_XOUT_H 0x3B
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
#define MPU6050_RA_TEMP_OUT_H 0x41
#define MPU6050_RA_TEMP_OUT_L 0x42
#define MPU6050_RA_GYRO_XOUT_H 0x43
#define MPU6050_RA_GYRO_XOUT_L 0x44
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
#define MPU6050_RA_USER_CTRL 0x6A
#define MPU6050_RA_PWR_MGMT_1 0x6B
#define MPU6050_RA_PWR_MGMT_2 0x6C
#define MPU6050_RA_BANK_SEL 0x6D
#define MPU6050_RA_MEM_START_ADDR 0x6E
#define MPU6050_RA_MEM_R_W 0x6F
#define MPU6050_RA_DMP_CFG_1 0x70
#define MPU6050_RA_DMP_CFG_2 0x71
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
#define MPU6050_RA_FIFO_R_W 0x74
#define MPU6050_RA_WHO_AM_I 0x75
#define MPU6050_TC_PWR_MODE_BIT 7
#define MPU6050_TC_OFFSET_BIT 6
#define MPU6050_TC_OFFSET_LENGTH 6

Glosario
92
92
#define MPU6050_TC_OTP_BNK_VLD_BIT 0
#define MPU6050_VDDIO_LEVEL_VLOGIC 0
#define MPU6050_VDDIO_LEVEL_VDD 1
#define MPU6050_CFG_EXT_SYNC_SET_BIT 5
#define MPU6050_CFG_EXT_SYNC_SET_LENGTH 3
#define MPU6050_CFG_DLPF_CFG_BIT 2
#define MPU6050_CFG_DLPF_CFG_LENGTH 3
#define MPU6050_EXT_SYNC_DISABLED 0x0
#define MPU6050_EXT_SYNC_TEMP_OUT_L 0x1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L 0x2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L 0x3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L 0x4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L 0x5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L 0x6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L 0x7
#define MPU6050_DLPF_BW_256 0x00
#define MPU6050_DLPF_BW_188 0x01
#define MPU6050_DLPF_BW_98 0x02
#define MPU6050_DLPF_BW_42 0x03
#define MPU6050_DLPF_BW_20 0x04
#define MPU6050_DLPF_BW_10 0x05
#define MPU6050_DLPF_BW_5 0x06
#define MPU6050_GCONFIG_FS_SEL_BIT 4
#define MPU6050_GCONFIG_FS_SEL_LENGTH 2
#define MPU6050_GYRO_FS_250 0x00
#define MPU6050_GYRO_FS_500 0x01
#define MPU6050_GYRO_FS_1000 0x02
#define MPU6050_GYRO_FS_2000 0x03
#define MPU6050_ACONFIG_XA_ST_BIT 7
#define MPU6050_ACONFIG_YA_ST_BIT 6
#define MPU6050_ACONFIG_ZA_ST_BIT 5
#define MPU6050_ACONFIG_AFS_SEL_BIT 4
#define MPU6050_ACONFIG_AFS_SEL_LENGTH 2
#define MPU6050_ACONFIG_ACCEL_HPF_BIT 2
#define MPU6050_ACONFIG_ACCEL_HPF_LENGTH 3
#define MPU6050_ACCEL_FS_2 0x00
#define MPU6050_ACCEL_FS_4 0x01
#define MPU6050_ACCEL_FS_8 0x02
#define MPU6050_ACCEL_FS_16 0x03
#define MPU6050_DHPF_RESET 0x00
#define MPU6050_DHPF_5 0x01
#define MPU6050_DHPF_2P5 0x02
#define MPU6050_DHPF_1P25 0x03
#define MPU6050_DHPF_0P63 0x04
#define MPU6050_DHPF_HOLD 0x07
#define MPU6050_TEMP_FIFO_EN_BIT 7
#define MPU6050_XG_FIFO_EN_BIT 6
#define MPU6050_YG_FIFO_EN_BIT 5
#define MPU6050_ZG_FIFO_EN_BIT 4
#define MPU6050_ACCEL_FIFO_EN_BIT 3
#define MPU6050_SLV2_FIFO_EN_BIT 2
#define MPU6050_SLV1_FIFO_EN_BIT 1
93
93 Sistema de seguridad para personas dependientes
#define MPU6050_SLV0_FIFO_EN_BIT 0
#define MPU6050_MULT_MST_EN_BIT 7
#define MPU6050_WAIT_FOR_ES_BIT 6
#define MPU6050_SLV_3_FIFO_EN_BIT 5
#define MPU6050_I2C_MST_P_NSR_BIT 4
#define MPU6050_I2C_MST_CLK_BIT 3
#define MPU6050_I2C_MST_CLK_LENGTH 4
#define MPU6050_CLOCK_DIV_348 0x0
#define MPU6050_CLOCK_DIV_333 0x1
#define MPU6050_CLOCK_DIV_320 0x2
#define MPU6050_CLOCK_DIV_308 0x3
#define MPU6050_CLOCK_DIV_296 0x4
#define MPU6050_CLOCK_DIV_286 0x5
#define MPU6050_CLOCK_DIV_276 0x6
#define MPU6050_CLOCK_DIV_267 0x7
#define MPU6050_CLOCK_DIV_258 0x8
#define MPU6050_CLOCK_DIV_500 0x9
#define MPU6050_CLOCK_DIV_471 0xA
#define MPU6050_CLOCK_DIV_444 0xB
#define MPU6050_CLOCK_DIV_421 0xC
#define MPU6050_CLOCK_DIV_400 0xD
#define MPU6050_CLOCK_DIV_381 0xE
#define MPU6050_CLOCK_DIV_364 0xF
#define MPU6050_I2C_SLV_RW_BIT 7
#define MPU6050_I2C_SLV_ADDR_BIT 6
#define MPU6050_I2C_SLV_ADDR_LENGTH 7
#define MPU6050_I2C_SLV_EN_BIT 7
#define MPU6050_I2C_SLV_BYTE_SW_BIT 6
#define MPU6050_I2C_SLV_REG_DIS_BIT 5
#define MPU6050_I2C_SLV_GRP_BIT 4
#define MPU6050_I2C_SLV_LEN_BIT 3
#define MPU6050_I2C_SLV_LEN_LENGTH 4
#define MPU6050_I2C_SLV4_RW_BIT 7
#define MPU6050_I2C_SLV4_ADDR_BIT 6
#define MPU6050_I2C_SLV4_ADDR_LENGTH 7
#define MPU6050_I2C_SLV4_EN_BIT 7
#define MPU6050_I2C_SLV4_INT_EN_BIT 6
#define MPU6050_I2C_SLV4_REG_DIS_BIT 5
#define MPU6050_I2C_SLV4_MST_DLY_BIT 4
#define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5
#define MPU6050_MST_PASS_THROUGH_BIT 7
#define MPU6050_MST_I2C_SLV4_DONE_BIT 6
#define MPU6050_MST_I2C_LOST_ARB_BIT 5
#define MPU6050_MST_I2C_SLV4_NACK_BIT 4
#define MPU6050_MST_I2C_SLV3_NACK_BIT 3
#define MPU6050_MST_I2C_SLV2_NACK_BIT 2
#define MPU6050_MST_I2C_SLV1_NACK_BIT 1
#define MPU6050_MST_I2C_SLV0_NACK_BIT 0
#define MPU6050_INTCFG_INT_LEVEL_BIT 7
#define MPU6050_INTCFG_INT_OPEN_BIT 6
#define MPU6050_INTCFG_LATCH_INT_EN_BIT 5
#define MPU6050_INTCFG_INT_RD_CLEAR_BIT 4
#define MPU6050_INTCFG_FSYNC_INT_LEVEL_BIT 3
#define MPU6050_INTCFG_FSYNC_INT_EN_BIT 2
#define MPU6050_INTCFG_I2C_BYPASS_EN_BIT 1
#define MPU6050_INTCFG_CLKOUT_EN_BIT 0

Glosario
94
94
#define MPU6050_INTMODE_ACTIVEHIGH 0x00
#define MPU6050_INTMODE_ACTIVELOW 0x01
#define MPU6050_INTDRV_PUSHPULL 0x00
#define MPU6050_INTDRV_OPENDRAIN 0x01
#define MPU6050_INTLATCH_50USPULSE 0x00
#define MPU6050_INTLATCH_WAITCLEAR 0x01
#define MPU6050_INTCLEAR_STATUSREAD 0x00
#define MPU6050_INTCLEAR_ANYREAD 0x01
#define MPU6050_INTERRUPT_FF_BIT 7
#define MPU6050_INTERRUPT_MOT_BIT 6
#define MPU6050_INTERRUPT_ZMOT_BIT 5
#define MPU6050_INTERRUPT_FIFO_OFLOW_BIT 4
#define MPU6050_INTERRUPT_I2C_MST_INT_BIT 3
#define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2
#define MPU6050_INTERRUPT_DMP_INT_BIT 1
#define MPU6050_INTERRUPT_DATA_RDY_BIT 0
// TODO: figure out what these actually do
// UMPL source code is not very obivous
#define MPU6050_DMPINT_5_BIT 5
#define MPU6050_DMPINT_4_BIT 4
#define MPU6050_DMPINT_3_BIT 3
#define MPU6050_DMPINT_2_BIT 2
#define MPU6050_DMPINT_1_BIT 1
#define MPU6050_DMPINT_0_BIT 0
#define MPU6050_MOTION_MOT_XNEG_BIT 7
#define MPU6050_MOTION_MOT_XPOS_BIT 6
#define MPU6050_MOTION_MOT_YNEG_BIT 5
#define MPU6050_MOTION_MOT_YPOS_BIT 4
#define MPU6050_MOTION_MOT_ZNEG_BIT 3
#define MPU6050_MOTION_MOT_ZPOS_BIT 2
#define MPU6050_MOTION_MOT_ZRMOT_BIT 0
#define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7
#define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4
#define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3
#define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2
#define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1
#define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0
#define MPU6050_PATHRESET_GYRO_RESET_BIT 2
#define MPU6050_PATHRESET_ACCEL_RESET_BIT 1
#define MPU6050_PATHRESET_TEMP_RESET_BIT 0
#define MPU6050_DETECT_ACCEL_ON_DELAY_BIT 5
#define MPU6050_DETECT_ACCEL_ON_DELAY_LENGTH 2
#define MPU6050_DETECT_FF_COUNT_BIT 3
#define MPU6050_DETECT_FF_COUNT_LENGTH 2
#define MPU6050_DETECT_MOT_COUNT_BIT 1
#define MPU6050_DETECT_MOT_COUNT_LENGTH 2
#define MPU6050_DETECT_DECREMENT_RESET 0x0
#define MPU6050_DETECT_DECREMENT_1 0x1
#define MPU6050_DETECT_DECREMENT_2 0x2
#define MPU6050_DETECT_DECREMENT_4 0x3

95
95 Sistema de seguridad para personas dependientes
#define MPU6050_USERCTRL_DMP_EN_BIT 7
#define MPU6050_USERCTRL_FIFO_EN_BIT 6
#define MPU6050_USERCTRL_I2C_MST_EN_BIT 5
#define MPU6050_USERCTRL_I2C_IF_DIS_BIT 4
#define MPU6050_USERCTRL_DMP_RESET_BIT 3
#define MPU6050_USERCTRL_FIFO_RESET_BIT 2
#define MPU6050_USERCTRL_I2C_MST_RESET_BIT 1
#define MPU6050_USERCTRL_SIG_COND_RESET_BIT 0
#define MPU6050_PWR1_DEVICE_RESET_BIT 7
#define MPU6050_PWR1_SLEEP_BIT 6
#define MPU6050_PWR1_CYCLE_BIT 5
#define MPU6050_PWR1_TEMP_DIS_BIT 3
#define MPU6050_PWR1_CLKSEL_BIT 2
#define MPU6050_PWR1_CLKSEL_LENGTH 3
#define MPU6050_CLOCK_INTERNAL 0x00
#define MPU6050_CLOCK_PLL_XGYRO 0x01
#define MPU6050_CLOCK_PLL_YGYRO 0x02
#define MPU6050_CLOCK_PLL_ZGYRO 0x03
#define MPU6050_CLOCK_PLL_EXT32K 0x04
#define MPU6050_CLOCK_PLL_EXT19M 0x05
#define MPU6050_CLOCK_KEEP_RESET 0x07
#define MPU6050_PWR2_LP_WAKE_CTRL_BIT 7
#define MPU6050_PWR2_LP_WAKE_CTRL_LENGTH 2
#define MPU6050_PWR2_STBY_XA_BIT 5
#define MPU6050_PWR2_STBY_YA_BIT 4
#define MPU6050_PWR2_STBY_ZA_BIT 3
#define MPU6050_PWR2_STBY_XG_BIT 2
#define MPU6050_PWR2_STBY_YG_BIT 1
#define MPU6050_PWR2_STBY_ZG_BIT 0
#define MPU6050_WAKE_FREQ_1P25 0x0
#define MPU6050_WAKE_FREQ_2P5 0x1
#define MPU6050_WAKE_FREQ_5 0x2
#define MPU6050_WAKE_FREQ_10 0x3
#define MPU6050_BANKSEL_PRFTCH_EN_BIT 6
#define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5
#define MPU6050_BANKSEL_MEM_SEL_BIT 4
#define MPU6050_BANKSEL_MEM_SEL_LENGTH 5
#define MPU6050_WHO_AM_I_BIT 6
#define MPU6050_WHO_AM_I_LENGTH 6
#define MPU6050_DMP_MEMORY_BANKS 8
#define MPU6050_DMP_MEMORY_BANK_SIZE 256
#define MPU6050_DMP_MEMORY_CHUNK_SIZE 16
// note: DMP code memory blocks defined at end of header file
class MPU6050 {
public:
MPU6050();
MPU6050(uint8_t address);
void initialize();
bool testConnection();
// AUX_VDDIO register
uint8_t getAuxVDDIOLevel();

Glosario
96
96
void setAuxVDDIOLevel(uint8_t level);
// SMPLRT_DIV register
uint8_t getRate();
void setRate(uint8_t rate);
uint8_t checkMagStatus();
// CONFIG register
uint8_t getExternalFrameSync();
void setExternalFrameSync(uint8_t sync);
uint8_t getDLPFMode();
void setDLPFMode(uint8_t bandwidth);
// GYRO_CONFIG register
uint8_t getFullScaleGyroRange();
void setFullScaleGyroRange(uint8_t range);
// ACCEL_CONFIG register
bool getAccelXSelfTest();
void setAccelXSelfTest(bool enabled);
bool getAccelYSelfTest();
void setAccelYSelfTest(bool enabled);
bool getAccelZSelfTest();
void setAccelZSelfTest(bool enabled);
uint8_t getFullScaleAccelRange();
void setFullScaleAccelRange(uint8_t range);
uint8_t getDHPFMode();
void setDHPFMode(uint8_t mode);
// FF_THR register
uint8_t getFreefallDetectionThreshold();
void setFreefallDetectionThreshold(uint8_t threshold);
// FF_DUR register
uint8_t getFreefallDetectionDuration();
void setFreefallDetectionDuration(uint8_t duration);
// MOT_THR register
uint8_t getMotionDetectionThreshold();
void setMotionDetectionThreshold(uint8_t threshold);
// MOT_DUR register
uint8_t getMotionDetectionDuration();
void setMotionDetectionDuration(uint8_t duration);
// ZRMOT_THR register
uint8_t getZeroMotionDetectionThreshold();
void setZeroMotionDetectionThreshold(uint8_t threshold);
// ZRMOT_DUR register
uint8_t getZeroMotionDetectionDuration();
void setZeroMotionDetectionDuration(uint8_t duration);
// FIFO_EN register
bool getTempFIFOEnabled();
void setTempFIFOEnabled(bool enabled);
bool getXGyroFIFOEnabled();
void setXGyroFIFOEnabled(bool enabled);
bool getYGyroFIFOEnabled();
void setYGyroFIFOEnabled(bool enabled);
bool getZGyroFIFOEnabled();

97
97 Sistema de seguridad para personas dependientes
void setZGyroFIFOEnabled(bool enabled);
bool getAccelFIFOEnabled();
void setAccelFIFOEnabled(bool enabled);
bool getSlave2FIFOEnabled();
void setSlave2FIFOEnabled(bool enabled);
bool getSlave1FIFOEnabled();
void setSlave1FIFOEnabled(bool enabled);
bool getSlave0FIFOEnabled();
void setSlave0FIFOEnabled(bool enabled);
// I2C_MST_CTRL register
bool getMultiMasterEnabled();
void setMultiMasterEnabled(bool enabled);
bool getWaitForExternalSensorEnabled();
void setWaitForExternalSensorEnabled(bool enabled);
bool getSlave3FIFOEnabled();
void setSlave3FIFOEnabled(bool enabled);
bool getSlaveReadWriteTransitionEnabled();
void setSlaveReadWriteTransitionEnabled(bool enabled);
uint8_t getMasterClockSpeed();
void setMasterClockSpeed(uint8_t speed);
// I2C_SLV* registers (Slave 0-3)
uint8_t getSlaveAddress(uint8_t num);
void setSlaveAddress(uint8_t num, uint8_t address);
uint8_t getSlaveRegister(uint8_t num);
void setSlaveRegister(uint8_t num, uint8_t reg);
bool getSlaveEnabled(uint8_t num);
void setSlaveEnabled(uint8_t num, bool enabled);
bool getSlaveWordByteSwap(uint8_t num);
void setSlaveWordByteSwap(uint8_t num, bool enabled);
bool getSlaveWriteMode(uint8_t num);
void setSlaveWriteMode(uint8_t num, bool mode);
bool getSlaveWordGroupOffset(uint8_t num);
void setSlaveWordGroupOffset(uint8_t num, bool enabled);
uint8_t getSlaveDataLength(uint8_t num);
void setSlaveDataLength(uint8_t num, uint8_t length);
// I2C_SLV* registers (Slave 4)
uint8_t getSlave4Address();
void setSlave4Address(uint8_t address);
uint8_t getSlave4Register();
void setSlave4Register(uint8_t reg);
void setSlave4OutputByte(uint8_t data);
bool getSlave4Enabled();
void setSlave4Enabled(bool enabled);
bool getSlave4InterruptEnabled();
void setSlave4InterruptEnabled(bool enabled);
bool getSlave4WriteMode();
void setSlave4WriteMode(bool mode);
uint8_t getSlave4MasterDelay();
void setSlave4MasterDelay(uint8_t delay);
uint8_t getSlate4InputByte();
// I2C_MST_STATUS register
bool getPassthroughStatus();
bool getSlave4IsDone();
bool getLostArbitration();
bool getSlave4Nack();
bool getSlave3Nack();
bool getSlave2Nack();
bool getSlave1Nack();
Glosario
98
98
bool getSlave0Nack();
// INT_PIN_CFG register
bool getInterruptMode();
void setInterruptMode(bool mode);
bool getInterruptDrive();
void setInterruptDrive(bool drive);
bool getInterruptLatch();
void setInterruptLatch(bool latch);
bool getInterruptLatchClear();
void setInterruptLatchClear(bool clear);
bool getFSyncInterruptLevel();
void setFSyncInterruptLevel(bool level);
bool getFSyncInterruptEnabled();
void setFSyncInterruptEnabled(bool enabled);
bool getI2CBypassEnabled();
void setI2CBypassEnabled(bool enabled);
bool getClockOutputEnabled();
void setClockOutputEnabled(bool enabled);
// INT_ENABLE register
uint8_t getIntEnabled();
void setIntEnabled(uint8_t enabled);
bool getIntFreefallEnabled();
void setIntFreefallEnabled(bool enabled);
bool getIntMotionEnabled();
void setIntMotionEnabled(bool enabled);
bool getIntZeroMotionEnabled();
void setIntZeroMotionEnabled(bool enabled);
bool getIntFIFOBufferOverflowEnabled();
void setIntFIFOBufferOverflowEnabled(bool enabled);
bool getIntI2CMasterEnabled();
void setIntI2CMasterEnabled(bool enabled);
bool getIntDataReadyEnabled();
void setIntDataReadyEnabled(bool enabled);
// INT_STATUS register
uint8_t getIntStatus();
bool getIntFreefallStatus();
bool getIntMotionStatus();
bool getIntZeroMotionStatus();
bool getIntFIFOBufferOverflowStatus();
bool getIntI2CMasterStatus();
bool getIntDataReadyStatus();
// ACCEL_*OUT_* registers
void getMotion9(int16_t* ax, int16_t* ay, int16_t* az, int16_t* gx,
int16_t* gy, int16_t* gz, int16_t* mx, int16_t* my, int16_t* mz);
void getMotion6(int16_t* ax, int16_t* ay, int16_t* az, int16_t* gx,
int16_t* gy, int16_t* gz);
void getAcceleration(int16_t* x, int16_t* y, int16_t* z);
int16_t getAccelerationX();
int16_t getAccelerationY();
int16_t getAccelerationZ();
// TEMP_OUT_* registers
int16_t getTemperature();
// GYRO_*OUT_* registers
void getRotation(int16_t* x, int16_t* y, int16_t* z);
int16_t getRotationX();
int16_t getRotationY();

99
99 Sistema de seguridad para personas dependientes
int16_t getRotationZ();
// MAG_*OUT_* registers
void getMag(int16_t* x, int16_t* y, int16_t* z);
// EXT_SENS_DATA_* registers
uint8_t getExternalSensorByte(int position);
uint16_t getExternalSensorWord(int position);
uint32_t getExternalSensorDWord(int position);
// MOT_DETECT_STATUS register
bool getXNegMotionDetected();
bool getXPosMotionDetected();
bool getYNegMotionDetected();
bool getYPosMotionDetected();
bool getZNegMotionDetected();
bool getZPosMotionDetected();
bool getZeroMotionDetected();
// I2C_SLV*_DO register
void setSlaveOutputByte(uint8_t num, uint8_t data);
// I2C_MST_DELAY_CTRL register
bool getExternalShadowDelayEnabled();
void setExternalShadowDelayEnabled(bool enabled);
bool getSlaveDelayEnabled(uint8_t num);
void setSlaveDelayEnabled(uint8_t num, bool enabled);
// SIGNAL_PATH_RESET register
void resetGyroscopePath();
void resetAccelerometerPath();
void resetTemperaturePath();
// MOT_DETECT_CTRL register
uint8_t getAccelerometerPowerOnDelay();
void setAccelerometerPowerOnDelay(uint8_t delay);
uint8_t getFreefallDetectionCounterDecrement();
void setFreefallDetectionCounterDecrement(uint8_t decrement);
uint8_t getMotionDetectionCounterDecrement();
void setMotionDetectionCounterDecrement(uint8_t decrement);
// USER_CTRL register
bool getFIFOEnabled();
void setFIFOEnabled(bool enabled);
bool getI2CMasterModeEnabled();
void setI2CMasterModeEnabled(bool enabled);
void switchSPIEnabled(bool enabled);
void resetFIFO();
void resetI2CMaster();
void resetSensors();
// PWR_MGMT_1 register
void reset();
bool getSleepEnabled();
void setSleepEnabled(bool enabled);
bool getWakeCycleEnabled();
void setWakeCycleEnabled(bool enabled);
bool getTempSensorEnabled();
void setTempSensorEnabled(bool enabled);
uint8_t getClockSource();
void setClockSource(uint8_t source);

Glosario
100
100
// PWR_MGMT_2 register
uint8_t getWakeFrequency();
void setWakeFrequency(uint8_t frequency);
bool getStandbyXAccelEnabled();
void setStandbyXAccelEnabled(bool enabled);
bool getStandbyYAccelEnabled();
void setStandbyYAccelEnabled(bool enabled);
bool getStandbyZAccelEnabled();
void setStandbyZAccelEnabled(bool enabled);
bool getStandbyXGyroEnabled();
void setStandbyXGyroEnabled(bool enabled);
bool getStandbyYGyroEnabled();
void setStandbyYGyroEnabled(bool enabled);
bool getStandbyZGyroEnabled();
void setStandbyZGyroEnabled(bool enabled);
// FIFO_COUNT_* registers
uint16_t getFIFOCount();
// FIFO_R_W register
uint8_t getFIFOByte();
void setFIFOByte(uint8_t data);
void getFIFOBytes(uint8_t *data, uint8_t length);
// WHO_AM_I register
uint8_t getDeviceID();
void setDeviceID(uint8_t id);
// ======== UNDOCUMENTED/DMP REGISTERS/METHODS ========
// XG_OFFS_TC register
uint8_t getOTPBankValid();
void setOTPBankValid(bool enabled);
int8_t getXGyroOffset();
void setXGyroOffset(int8_t offset);
// YG_OFFS_TC register
int8_t getYGyroOffset();
void setYGyroOffset(int8_t offset);
// ZG_OFFS_TC register
int8_t getZGyroOffset();
void setZGyroOffset(int8_t offset);
// X_FINE_GAIN register
int8_t getXFineGain();
void setXFineGain(int8_t gain);
// Y_FINE_GAIN register
int8_t getYFineGain();
void setYFineGain(int8_t gain);
// Z_FINE_GAIN register
int8_t getZFineGain();
void setZFineGain(int8_t gain);
// XA_OFFS_* registers
int16_t getXAccelOffset();
void setXAccelOffset(int16_t offset);
// YA_OFFS_* register
int16_t getYAccelOffset();

101
101 Sistema de seguridad para personas dependientes
void setYAccelOffset(int16_t offset);
// ZA_OFFS_* register
int16_t getZAccelOffset();
void setZAccelOffset(int16_t offset);
// XG_OFFS_USR* registers
int16_t getXGyroOffsetUser();
void setXGyroOffsetUser(int16_t offset);
// YG_OFFS_USR* register
int16_t getYGyroOffsetUser();
void setYGyroOffsetUser(int16_t offset);
// ZG_OFFS_USR* register
int16_t getZGyroOffsetUser();
void setZGyroOffsetUser(int16_t offset);
// INT_ENABLE register (DMP functions)
bool getIntPLLReadyEnabled();
void setIntPLLReadyEnabled(bool enabled);
bool getIntDMPEnabled();
void setIntDMPEnabled(bool enabled);
// DMP_INT_STATUS
bool getDMPInt5Status();
bool getDMPInt4Status();
bool getDMPInt3Status();
bool getDMPInt2Status();
bool getDMPInt1Status();
bool getDMPInt0Status();
// INT_STATUS register (DMP functions)
bool getIntPLLReadyStatus();
bool getIntDMPStatus();
// USER_CTRL register (DMP functions)
bool getDMPEnabled();
void setDMPEnabled(bool enabled);
void resetDMP();
// BANK_SEL register
void setMemoryBank(uint8_t bank, bool prefetchEnabled=false, bool
userBank=false);
// MEM_START_ADDR register
void setMemoryStartAddress(uint8_t address);
// MEM_R_W register
uint8_t readMemoryByte();
void writeMemoryByte(uint8_t data);
void readMemoryBlock(uint8_t *data, uint16_t dataSize, uint8_t
bank=0, uint8_t address=0);
bool writeMemoryBlock(const uint8_t *data, uint16_t dataSize, uint8_t
bank=0, uint8_t address=0, bool verify=true, bool useProgMem=false);
bool writeProgMemoryBlock(const uint8_t *data, uint16_t dataSize,
uint8_t bank=0, uint8_t address=0, bool verify=true);
bool writeDMPConfigurationSet(const uint8_t *data, uint16_t dataSize,
bool useProgMem=false);
bool writeProgDMPConfigurationSet(const uint8_t *data, uint16_t
dataSize);

Glosario
102
102
// DMP_CFG_1 register
uint8_t getDMPConfig1();
void setDMPConfig1(uint8_t config);
// DMP_CFG_2 register
uint8_t getDMPConfig2();
void setDMPConfig2(uint8_t config);
// special methods for MotionApps 2.0 implementation
#ifdef MPU6050_INCLUDE_DMP_MOTIONAPPS20
uint8_t *dmpPacketBuffer;
uint16_t dmpPacketSize;
uint8_t dmpInitialize();
bool dmpPacketAvailable();
uint8_t dmpSetFIFORate(uint8_t fifoRate);
uint8_t dmpGetFIFORate();
uint8_t dmpGetSampleStepSizeMS();
uint8_t dmpGetSampleFrequency();
int32_t dmpDecodeTemperature(int8_t tempReg);
// Register callbacks after a packet of FIFO data is processed
//uint8_t dmpRegisterFIFORateProcess(inv_obj_func func, int16_t
priority);
//uint8_t dmpUnregisterFIFORateProcess(inv_obj_func func);
uint8_t dmpRunFIFORateProcesses();
// Setup FIFO for various output
uint8_t dmpSendQuaternion(uint_fast16_t accuracy);
uint8_t dmpSendGyro(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendAccel(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendLinearAccel(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendLinearAccelInWorld(uint_fast16_t elements,
uint_fast16_t accuracy);
uint8_t dmpSendControlData(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendSensorData(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendExternalSensorData(uint_fast16_t elements,
uint_fast16_t accuracy);
uint8_t dmpSendGravity(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendPacketNumber(uint_fast16_t accuracy);
uint8_t dmpSendQuantizedAccel(uint_fast16_t elements,
uint_fast16_t accuracy);
uint8_t dmpSendEIS(uint_fast16_t elements, uint_fast16_t
accuracy);
// Get Fixed Point data from FIFO
uint8_t dmpGetAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(Quaternion *q, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(int32_t *data, const uint8_t*
packet=0);

103
103 Sistema de seguridad para personas dependientes
uint8_t dmpGet6AxisQuaternion(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGet6AxisQuaternion(Quaternion *q, const uint8_t*
packet=0);
uint8_t dmpGetRelativeQuaternion(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetRelativeQuaternion(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetRelativeQuaternion(Quaternion *data, const uint8_t*
packet=0);
uint8_t dmpGetGyro(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetMag (VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpSetLinearAccelFilterCoefficient(float coef);
uint8_t dmpGetLinearAccel(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccel(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, VectorInt16 *vRaw,
VectorFloat *gravity);
uint8_t dmpGetLinearAccelInWorld(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccelInWorld(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, VectorInt16
*vReal, Quaternion *q);
uint8_t dmpGetGyroAndAccelSensor(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetGyroAndAccelSensor(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetGyroAndAccelSensor(VectorInt16 *g, VectorInt16 *a,
const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetControlData(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetTemperature(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetGravity(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorFloat *v, Quaternion *q);
uint8_t dmpGetUnquantizedAccel(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetUnquantizedAccel(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetUnquantizedAccel(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetQuantizedAccel(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetQuantizedAccel(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetQuantizedAccel(VectorInt16 *v, const uint8_t*
packet=0);

Glosario
104
104
uint8_t dmpGetExternalSensorData(int32_t *data, uint16_t size,
const uint8_t* packet=0);
uint8_t dmpGetEIS(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetEuler(float *data, Quaternion *q);
uint8_t dmpGetYawPitchRoll(float *data, Quaternion *q,
VectorFloat *gravity);
// Get Floating Point data from FIFO
uint8_t dmpGetAccelFloat(float *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternionFloat(float *data, const uint8_t*
packet=0);
uint8_t dmpProcessFIFOPacket(const unsigned char *dmpData);
uint8_t dmpReadAndProcessFIFOPacket(uint8_t numPackets, uint8_t
*processed=NULL);
uint8_t dmpSetFIFOProcessedCallback(void (*func) (void));
uint8_t dmpInitFIFOParam();
uint8_t dmpCloseFIFO();
uint8_t dmpSetGyroDataSource(uint8_t source);
uint8_t dmpDecodeQuantizedAccel();
uint32_t dmpGetGyroSumOfSquare();
uint32_t dmpGetAccelSumOfSquare();
void dmpOverrideQuaternion(long *q);
uint16_t dmpGetFIFOPacketSize();
#endif
// special methods for MotionApps 4.1 implementation
#ifdef MPU6050_INCLUDE_DMP_MOTIONAPPS41
uint8_t *dmpPacketBuffer;
uint16_t dmpPacketSize;
uint8_t dmpInitialize();
bool dmpPacketAvailable();
uint8_t dmpSetFIFORate(uint8_t fifoRate);
uint8_t dmpGetFIFORate();
uint8_t dmpGetSampleStepSizeMS();
uint8_t dmpGetSampleFrequency();
int32_t dmpDecodeTemperature(int8_t tempReg);
// Register callbacks after a packet of FIFO data is processed
//uint8_t dmpRegisterFIFORateProcess(inv_obj_func func, int16_t
priority);
//uint8_t dmpUnregisterFIFORateProcess(inv_obj_func func);
uint8_t dmpRunFIFORateProcesses();
// Setup FIFO for various output
uint8_t dmpSendQuaternion(uint_fast16_t accuracy);
uint8_t dmpSendGyro(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendAccel(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendLinearAccel(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendLinearAccelInWorld(uint_fast16_t elements,
uint_fast16_t accuracy);
uint8_t dmpSendControlData(uint_fast16_t elements, uint_fast16_t
accuracy);

105
105 Sistema de seguridad para personas dependientes
uint8_t dmpSendSensorData(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendExternalSensorData(uint_fast16_t elements,
uint_fast16_t accuracy);
uint8_t dmpSendGravity(uint_fast16_t elements, uint_fast16_t
accuracy);
uint8_t dmpSendPacketNumber(uint_fast16_t accuracy);
uint8_t dmpSendQuantizedAccel(uint_fast16_t elements,
uint_fast16_t accuracy);
uint8_t dmpSendEIS(uint_fast16_t elements, uint_fast16_t
accuracy);
// Get Fixed Point data from FIFO
uint8_t dmpGetAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(Quaternion *q, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGet6AxisQuaternion(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGet6AxisQuaternion(Quaternion *q, const uint8_t*
packet=0);
uint8_t dmpGetRelativeQuaternion(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetRelativeQuaternion(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetRelativeQuaternion(Quaternion *data, const uint8_t*
packet=0);
uint8_t dmpGetGyro(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetMag(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetMag(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpSetLinearAccelFilterCoefficient(float coef);
uint8_t dmpGetLinearAccel(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccel(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, VectorInt16 *vRaw,
VectorFloat *gravity);
uint8_t dmpGetLinearAccelInWorld(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccelInWorld(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, VectorInt16
*vReal, Quaternion *q);
uint8_t dmpGetGyroAndAccelSensor(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetGyroAndAccelSensor(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetGyroAndAccelSensor(VectorInt16 *g, VectorInt16 *a,
const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int16_t *data, const uint8_t* packet=0);

Glosario
106
106
uint8_t dmpGetGyroSensor(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetControlData(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetTemperature(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetGravity(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorFloat *v, Quaternion *q);
uint8_t dmpGetUnquantizedAccel(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetUnquantizedAccel(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetUnquantizedAccel(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetQuantizedAccel(int32_t *data, const uint8_t*
packet=0);
uint8_t dmpGetQuantizedAccel(int16_t *data, const uint8_t*
packet=0);
uint8_t dmpGetQuantizedAccel(VectorInt16 *v, const uint8_t*
packet=0);
uint8_t dmpGetExternalSensorData(int32_t *data, uint16_t size,
const uint8_t* packet=0);
uint8_t dmpGetEIS(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetEuler(float *data, Quaternion *q);
uint8_t dmpGetYawPitchRoll(float *data, Quaternion *q,
VectorFloat *gravity);
// Get Floating Point data from FIFO
uint8_t dmpGetAccelFloat(float *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternionFloat(float *data, const uint8_t*
packet=0);
uint8_t dmpProcessFIFOPacket(const unsigned char *dmpData);
uint8_t dmpReadAndProcessFIFOPacket(uint8_t numPackets, uint8_t
*processed=NULL);
uint8_t dmpSetFIFOProcessedCallback(void (*func) (void));
uint8_t dmpInitFIFOParam();
uint8_t dmpCloseFIFO();
uint8_t dmpSetGyroDataSource(uint8_t source);
uint8_t dmpDecodeQuantizedAccel();
uint32_t dmpGetGyroSumOfSquare();
uint32_t dmpGetAccelSumOfSquare();
void dmpOverrideQuaternion(long *q);
uint16_t dmpGetFIFOPacketSize();
#endif
private:
uint8_t devAddr;
uint8_t buffer[14];
};
#endif /* _MPU6050_H_ */
Librería I2C

107
107 Sistema de seguridad para personas dependientes
// I2Cdev library collection - Main I2C device class header file
// Abstracts bit and byte I2C R/W functions into a convenient class
// 6/9/2012 by Jeff Rowberg <[email protected]>
//
// Changelog:
// 2012-06-09 - fix major issue with reading > 32 bytes at a time with
Arduino Wire
// - add compiler warnings when using outdated or IDE or
limited I2Cdev implementation
// 2011-11-01 - fix write*Bits mask calculation (thanks sasquatch @
Arduino forums)
// 2011-10-03 - added automatic Arduino version detection for ease of use
// 2011-10-02 - added Gene Knight's NBWire TwoWire class implementation
with small modifications
// 2011-08-31 - added support for Arduino 1.0 Wire library (methods are
different from 0.x)
// 2011-08-03 - added optional timeout parameter to read* methods to
easily change from default
// 2011-08-02 - added support for 16-bit registers
// - fixed incorrect Doxygen comments on some methods
// - added timeout value for read operations (thanks mem @
Arduino forums)
// 2011-07-30 - changed read/write function structures to return success
or byte counts
// - made all methods static for multi-device memory savings
// 2011-07-28 - initial release
/* ============================================
I2Cdev device library code is placed under the MIT license
Copyright (c) 2012 Jeff Rowberg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
===============================================
*/
#ifndef _I2CDEV_H_
#define _I2CDEV_H_
// --------------------------------------------------------------------------
---
// I2C interface implementation setting
// --------------------------------------------------------------------------
---
#define I2CDEV_IMPLEMENTATION I2CDEV_ARDUINO_WIRE

Glosario
108
108
// comment this out if you are using a non-optimal IDE/implementation setting
// but want the compiler to shut up about it
#define I2CDEV_IMPLEMENTATION_WARNINGS
// --------------------------------------------------------------------------
---
// I2C interface implementation options
// --------------------------------------------------------------------------
---
#define I2CDEV_ARDUINO_WIRE 1 // Wire object from Arduino
#define I2CDEV_BUILTIN_NBWIRE 2 // Tweaked Wire object from Gene
Knight's NBWire project
// ^^^ NBWire implementation is still
buggy w/some interrupts!
#define I2CDEV_BUILTIN_FASTWIRE 3 // FastWire object from Francesco
Ferrara's project
// ^^^ FastWire implementation in
I2Cdev is INCOMPLETE!
// --------------------------------------------------------------------------
---
// Arduino-style "Serial.print" debug constant (uncomment to enable)
// --------------------------------------------------------------------------
---
//#define I2CDEV_SERIAL_DEBUG
#ifdef ARDUINO
#if ARDUINO < 100
#include "WProgram.h"
#else
#include "Arduino.h"
#endif
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include <Wire.h>
#endif
#else
#include "ArduinoWrapper.h"
#endif
// 1000ms default read timeout (modify with "I2Cdev::readTimeout = [ms];")
#define I2CDEV_DEFAULT_READ_TIMEOUT 1000
class I2Cdev {
public:
I2Cdev();
static int8_t readBit(uint8_t devAddr, uint8_t regAddr, uint8_t
bitNum, uint8_t *data, uint16_t timeout=I2Cdev::readTimeout);
static int8_t readBitW(uint8_t devAddr, uint8_t regAddr, uint8_t
bitNum, uint16_t *data, uint16_t timeout=I2Cdev::readTimeout);
static int8_t readBits(uint8_t devAddr, uint8_t regAddr, uint8_t
bitStart, uint8_t length, uint8_t *data, uint16_t
timeout=I2Cdev::readTimeout);
static int8_t readBitsW(uint8_t devAddr, uint8_t regAddr, uint8_t
bitStart, uint8_t length, uint16_t *data, uint16_t
timeout=I2Cdev::readTimeout);
static int8_t readByte(uint8_t devAddr, uint8_t regAddr, uint8_t
*data, uint16_t timeout=I2Cdev::readTimeout);
static int8_t readWord(uint8_t devAddr, uint8_t regAddr, uint16_t
*data, uint16_t timeout=I2Cdev::readTimeout);

109
109 Sistema de seguridad para personas dependientes
static int8_t readBytes(uint8_t devAddr, uint8_t regAddr, uint8_t
length, uint8_t *data, uint16_t timeout=I2Cdev::readTimeout);
static int8_t readWords(uint8_t devAddr, uint8_t regAddr, uint8_t
length, uint16_t *data, uint16_t timeout=I2Cdev::readTimeout);
static bool writeBit(uint8_t devAddr, uint8_t regAddr, uint8_t
bitNum, uint8_t data);
static bool writeBitW(uint8_t devAddr, uint8_t regAddr, uint8_t
bitNum, uint16_t data);
static bool writeBits(uint8_t devAddr, uint8_t regAddr, uint8_t
bitStart, uint8_t length, uint8_t data);
static bool writeBitsW(uint8_t devAddr, uint8_t regAddr, uint8_t
bitStart, uint8_t length, uint16_t data);
static bool writeByte(uint8_t devAddr, uint8_t regAddr, uint8_t
data);
static bool writeWord(uint8_t devAddr, uint8_t regAddr, uint16_t
data);
static bool writeBytes(uint8_t devAddr, uint8_t regAddr, uint8_t
length, uint8_t *data);
static bool writeWords(uint8_t devAddr, uint8_t regAddr, uint8_t
length, uint16_t *data);
static uint16_t readTimeout;
};
#if I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
//////////////////////
// FastWire 0.2
// This is a library to help faster programs to read I2C devices.
// Copyright(C) 2011
// Francesco Ferrara
//////////////////////
/* Master */
#define TW_START 0x08
#define TW_REP_START 0x10
/* Master Transmitter */
#define TW_MT_SLA_ACK 0x18
#define TW_MT_SLA_NACK 0x20
#define TW_MT_DATA_ACK 0x28
#define TW_MT_DATA_NACK 0x30
#define TW_MT_ARB_LOST 0x38
/* Master Receiver */
#define TW_MR_ARB_LOST 0x38
#define TW_MR_SLA_ACK 0x40
#define TW_MR_SLA_NACK 0x48
#define TW_MR_DATA_ACK 0x50
#define TW_MR_DATA_NACK 0x58
#define TW_OK 0
#define TW_ERROR 1
class Fastwire {
private:
static boolean waitInt();
public:
static void setup(int khz, boolean pullup);
static byte write(byte device, byte address, byte value);

Glosario
110
110
static byte readBuf(byte device, byte address, byte *data, byte
num);
};
#endif
#if I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_NBWIRE
// NBWire implementation based heavily on code by Gene Knight
// Originally posted on the Arduino forum at
http://arduino.cc/forum/index.php/topic,70705.0.html
// Originally offered to the i2cdevlib project at
http://arduino.cc/forum/index.php/topic,68210.30.html
#define NBWIRE_BUFFER_LENGTH 32
class TwoWire {
private:
static uint8_t rxBuffer[];
static uint8_t rxBufferIndex;
static uint8_t rxBufferLength;
static uint8_t txAddress;
static uint8_t txBuffer[];
static uint8_t txBufferIndex;
static uint8_t txBufferLength;
// static uint8_t transmitting;
static void (*user_onRequest)(void);
static void (*user_onReceive)(int);
static void onRequestService(void);
static void onReceiveService(uint8_t*, int);
public:
TwoWire();
void begin();
void begin(uint8_t);
void begin(int);
void beginTransmission(uint8_t);
//void beginTransmission(int);
uint8_t endTransmission(uint16_t timeout=0);
void nbendTransmission(void (*function)(int)) ;
uint8_t requestFrom(uint8_t, int, uint16_t timeout=0);
//uint8_t requestFrom(int, int);
void nbrequestFrom(uint8_t, int, void (*function)(int));
void send(uint8_t);
void send(uint8_t*, uint8_t);
//void send(int);
void send(char*);
uint8_t available(void);
uint8_t receive(void);
void onReceive(void (*)(int));
void onRequest(void (*)(void));
};
#define TWI_READY 0
#define TWI_MRX 1
#define TWI_MTX 2
#define TWI_SRX 3
#define TWI_STX 4
#define TW_WRITE 0
#define TW_READ 1

111
111 Sistema de seguridad para personas dependientes
#define TW_MT_SLA_NACK 0x20
#define TW_MT_DATA_NACK 0x30
#define CPU_FREQ 16000000L
#define TWI_FREQ 100000L
#define TWI_BUFFER_LENGTH 32
/* TWI Status is in TWSR, in the top 5 bits: TWS7 - TWS3 */
#define TW_STATUS_MASK
(_BV(TWS7)|_BV(TWS6)|_BV(TWS5)|_BV(TWS4)|_BV(TWS3))
#define TW_STATUS (TWSR & TW_STATUS_MASK)
#define TW_START 0x08
#define TW_REP_START 0x10
#define TW_MT_SLA_ACK 0x18
#define TW_MT_SLA_NACK 0x20
#define TW_MT_DATA_ACK 0x28
#define TW_MT_DATA_NACK 0x30
#define TW_MT_ARB_LOST 0x38
#define TW_MR_ARB_LOST 0x38
#define TW_MR_SLA_ACK 0x40
#define TW_MR_SLA_NACK 0x48
#define TW_MR_DATA_ACK 0x50
#define TW_MR_DATA_NACK 0x58
#define TW_ST_SLA_ACK 0xA8
#define TW_ST_ARB_LOST_SLA_ACK 0xB0
#define TW_ST_DATA_ACK 0xB8
#define TW_ST_DATA_NACK 0xC0
#define TW_ST_LAST_DATA 0xC8
#define TW_SR_SLA_ACK 0x60
#define TW_SR_ARB_LOST_SLA_ACK 0x68
#define TW_SR_GCALL_ACK 0x70
#define TW_SR_ARB_LOST_GCALL_ACK 0x78
#define TW_SR_DATA_ACK 0x80
#define TW_SR_DATA_NACK 0x88
#define TW_SR_GCALL_DATA_ACK 0x90
#define TW_SR_GCALL_DATA_NACK 0x98
#define TW_SR_STOP 0xA0
#define TW_NO_INFO 0xF8
#define TW_BUS_ERROR 0x00
//#define _MMIO_BYTE(mem_addr) (*(volatile uint8_t *)(mem_addr))
//#define _SFR_BYTE(sfr) _MMIO_BYTE(_SFR_ADDR(sfr))
#ifndef sbi // set bit
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
#endif // sbi
#ifndef cbi // clear bit
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#endif // cbi
extern TwoWire Wire;
#endif // I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_NBWIRE
#endif /* _I2CDEV_H_ */
Librería GPS

Glosario
112
112
/***********************************
This is the Adafruit GPS library - the ultimate GPS library
for the ultimate GPS module!
Tested and works great with the Adafruit Ultimate GPS module
using MTK33x9 chipset
------> http://www.adafruit.com/products/746
Pick one up today at the Adafruit electronics shop
and help support open source hardware & software! -ada
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, check license.txt for more information
All text above must be included in any redistribution
****************************************/
// Fllybob added lines 34,35 and 40,41 to add 100mHz logging capability
#ifndef _ADAFRUIT_GPS_H
#define _ADAFRUIT_GPS_H
#ifdef __AVR__
#if ARDUINO >= 100
#include <SoftwareSerial.h>
#else
#include <NewSoftSerial.h>
#endif
#endif
// different commands to set the update rate from once a second (1 Hz) to 10
times a second (10Hz)
// Note that these only control the rate at which the position is echoed, to
actually speed up the
// position fix you must also send one of the position fix rate commands
below too.
#define PMTK_SET_NMEA_UPDATE_100_MILLIHERTZ "$PMTK220,10000*2F" // Once
every 10 seconds, 100 millihertz.
#define PMTK_SET_NMEA_UPDATE_200_MILLIHERTZ "$PMTK220,5000*1B" // Once
every 5 seconds, 200 millihertz.
#define PMTK_SET_NMEA_UPDATE_1HZ "$PMTK220,1000*1F"
#define PMTK_SET_NMEA_UPDATE_5HZ "$PMTK220,200*2C"
#define PMTK_SET_NMEA_UPDATE_10HZ "$PMTK220,100*2F"
// Position fix update rate commands.
#define PMTK_API_SET_FIX_CTL_100_MILLIHERTZ "$PMTK300,10000,0,0,0,0*2C" //
Once every 10 seconds, 100 millihertz.
#define PMTK_API_SET_FIX_CTL_200_MILLIHERTZ "$PMTK300,5000,0,0,0,0*18" //
Once every 5 seconds, 200 millihertz.
#define PMTK_API_SET_FIX_CTL_1HZ "$PMTK300,1000,0,0,0,0*1C"
#define PMTK_API_SET_FIX_CTL_5HZ "$PMTK300,200,0,0,0,0*2F"
// Can't fix position faster than 5 times a second!
#define PMTK_SET_BAUD_57600 "$PMTK251,57600*2C"
#define PMTK_SET_BAUD_9600 "$PMTK251,9600*17"
// turn on only the second sentence (GPRMC)
#define PMTK_SET_NMEA_OUTPUT_RMCONLY
"$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29"
// turn on GPRMC and GGA

113
113 Sistema de seguridad para personas dependientes
#define PMTK_SET_NMEA_OUTPUT_RMCGGA
"$PMTK314,0,1,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28"
// turn on ALL THE DATA
#define PMTK_SET_NMEA_OUTPUT_ALLDATA
"$PMTK314,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0*28"
// turn off output
#define PMTK_SET_NMEA_OUTPUT_OFF
"$PMTK314,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28"
// to generate your own sentences, check out the MTK command datasheet and
use a checksum calculator
// such as the awesome http://www.hhhh.org/wiml/proj/nmeaxor.html
#define PMTK_LOCUS_STARTLOG "$PMTK185,0*22"
#define PMTK_LOCUS_STOPLOG "$PMTK185,1*23"
#define PMTK_LOCUS_STARTSTOPACK "$PMTK001,185,3*3C"
#define PMTK_LOCUS_QUERY_STATUS "$PMTK183*38"
#define PMTK_LOCUS_ERASE_FLASH "$PMTK184,1*22"
#define LOCUS_OVERLAP 0
#define LOCUS_FULLSTOP 1
#define PMTK_ENABLE_SBAS "$PMTK313,1*2E"
#define PMTK_ENABLE_WAAS "$PMTK301,2*2E"
// standby command & boot successful message
#define PMTK_STANDBY "$PMTK161,0*28"
#define PMTK_STANDBY_SUCCESS "$PMTK001,161,3*36" // Not needed currently
#define PMTK_AWAKE "$PMTK010,002*2D"
// ask for the release and version
#define PMTK_Q_RELEASE "$PMTK605*31"
// request for updates on antenna status
#define PGCMD_ANTENNA "$PGCMD,33,1*6C"
#define PGCMD_NOANTENNA "$PGCMD,33,0*6D"
// how long to wait when we're looking for a response
#define MAXWAITSENTENCE 5
#if ARDUINO >= 100
#include "Arduino.h"
#if defined (__AVR__) && !defined(__AVR_ATmega32U4__)
#include "SoftwareSerial.h"
#endif
#else
#include "WProgram.h"
#include "NewSoftSerial.h"
#endif
class Adafruit_GPS {
public:
void begin(uint16_t baud);
#ifdef __AVR__
#if ARDUINO >= 100
Adafruit_GPS(SoftwareSerial *ser); // Constructor when using
SoftwareSerial
#else
Adafruit_GPS(NewSoftSerial *ser); // Constructor when using
NewSoftSerial
#endif
#endif

Glosario
114
114
Adafruit_GPS(HardwareSerial *ser); // Constructor when using HardwareSerial
char *lastNMEA(void);
boolean newNMEAreceived();
void common_init(void);
void sendCommand(const char *);
void pause(boolean b);
boolean parseNMEA(char *response);
uint8_t parseHex(char c);
char read(void);
boolean parse(char *);
void interruptReads(boolean r);
boolean wakeup(void);
boolean standby(void);
uint8_t hour, minute, seconds, year, month, day;
uint16_t milliseconds;
// Floating point latitude and longitude value in degrees.
float latitude, longitude;
// Fixed point latitude and longitude value with degrees stored in units of
1/100000 degrees,
// and minutes stored in units of 1/100000 degrees. See pull #13 for more
details:
// https://github.com/adafruit/Adafruit-GPS-Library/pull/13
int32_t latitude_fixed, longitude_fixed;
float latitudeDegrees, longitudeDegrees;
float geoidheight, altitude;
float speed, angle, magvariation, HDOP;
char lat, lon, mag;
boolean fix;
uint8_t fixquality, satellites;
boolean waitForSentence(const char *wait, uint8_t max = MAXWAITSENTENCE);
boolean LOCUS_StartLogger(void);
boolean LOCUS_StopLogger(void);
boolean LOCUS_ReadStatus(void);
uint16_t LOCUS_serial, LOCUS_records;
uint8_t LOCUS_type, LOCUS_mode, LOCUS_config, LOCUS_interval,
LOCUS_distance, LOCUS_speed, LOCUS_status, LOCUS_percent;
private:
boolean paused;
uint8_t parseResponse(char *response);
#ifdef __AVR__
#if ARDUINO >= 100
SoftwareSerial *gpsSwSerial;
#else
NewSoftSerial *gpsSwSerial;
#endif
#endif
HardwareSerial *gpsHwSerial;
};
#endif

115
115 Sistema de seguridad para personas dependientes
Anexo B: Esquemáticos

Anexo B: Esquemáticos
116
116

117
117 Sistema de seguridad para personas dependientes

Anexo B: Esquemáticos
118
118

119
119 Sistema de seguridad para personas dependientes

Anexo B: Esquemáticos
120
120

121
121 Sistema de seguridad para personas dependientes