Sistema de Control Vehícular-revisión
13
INSTITUTO POLITÉCNICO NACIONAL UNIDAD PROFESIONAL INTERDISCIPLINARIA EN INGENIERÍA Y TECNOLOGÍAS AVANZADAS PROTOCOLO INGENIERÍA MECATRÓNICA DTA-PPT-01 AVISO DE PRIVACIDAD: Los datos recabados serán protegidos, incorporados y tratados por el Departamento de Tecnologías Avanzadas de la UPIITA, cuya finalidad es el uso de los mismos exclusivamente para el proceso de registro de protocolos y proyectos de trabajo terminal y proyecto terminal, para la titulación por opción curricular de las carreras de Ingeniería Biónica, Ingeniería Mecatrónica, Ingeniería Telemática e Ingeniería en Sistemas Automotrices. El responsable de los datos personales es el Departamento de Tecnologías Avanzadas, perteneciente a la Subdirección Académica de la Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas del IPN, donde el interesado podrá ejercer los derechos de acceso y corrección en la dirección: Av. Instituto Politécnico Nacional No. Col. Barrio la Laguna Ticomán, Gustavo A. Madero, México DF, CP. 07340, en el Edificio 1 primer piso. Lo anterior se informa en cumplimiento del Decimoséptimo de los Lineamientos de Protección de Datos Personales, publicados en el Diario Oficial de la Federación el 30 de septiembre de 2005. TÍTULO DEL PROTOCOLO SISTEMA DE CONTROL VEHICULAR UTILIZANDO RECONOCIMIENTO DE PLACAS CON VISION ARTIFICIAL DATOS DEL PROTOCOLO Número de Revisión (Primera, segunda, tercera o Protocolo para Registro) 0 Semestre 2014-2015-I Número Proyecto Asignado (Número asignado por el profesor de Especialidad) - Fecha (Fecha programada) - Confidencialidad (Público o confidencial, incluir documento que lo avale) - Número de Hojas (Cantidad de Hojas del Protocolo) Patrocinador (En caso de existir, incluir el nombre en caso contrario dejar en blanco) Número Convenio o Registro (Incluir número de convenio patrocinio o número de proyecto de investigación que patrocina) ´ ALUMNO 1 DATOS ALUMNO 1 FIRMA Nombre del Alumno Yescas García Manuel Adrian Número de boleta 2011640141 Teléfono 5513096122 Correo electrónico [email protected] ALUMNO 2 DATOS ALUMNO 2 FIRMA Nombre del Alumno Número de boleta Teléfono Correo electrónico ALUMNO 3 DATOS ALUMNO 3 FIRMA Nombre del Alumno Número de boleta Teléfono Correo electrónico DATOS ASESOR 1 VISTO BUENO ASESOR 1 Nombre Asesor (Grado Académico) Academia Interno Externo 1 Cédula Profesional (Obligatorio) Correo electrónico [email protected] DATOS ASESOR 2 VISTO BUENO ASESOR 2 Nombre Asesor (Grado Académico) Academia Interno Externo Cédula Profesional (Obligatorio) Correo electrónico DATOS ASESOR 3 VISTO BUENO ASESOR 3 Nombre Asesor (Grado Académico) Academia Interno Externo Cédula Profesional (Obligatorio) Correo electrónico 1 En caso de Asesores Externos, deberá incluirse copia de su Cédula Profesional y Curriculum Vitae resumido en un archivo anexo al Protocolo.
-
Upload
tlacaelel-sanchez -
Category
Documents
-
view
58 -
download
0
description
Control de vehiculos automatico para optimizar el flujo de trafico en avenidas altamente transitadas con mira hacia la implementacion de un control vehicular autonomo en la ciudad de mexico
Transcript of Sistema de Control Vehícular-revisión

INSTITUTO POLITÉCNICO NACIONAL UNIDAD PROFESIONAL INTERDISCIPLINARIA EN INGENIERÍA Y TECNOLOGÍAS
AVANZADAS
PROTOCOLO
INGENIERÍA MECATRÓNICA
DTA-PPT-01
AVISO DE PRIVACIDAD: Los datos recabados serán protegidos, incorporados y tratados por el Departamento de Tecnologías Avanzadas de la UPIITA, cuya finalidad es el uso de los mismos exclusivamente para el proceso de registro de
protocolos y proyectos de trabajo terminal y proyecto terminal, para la titulación por opción curricular de las carreras de Ingeniería Biónica, Ingeniería Mecatrónica, Ingeniería Telemática e Ingeniería en Sistemas Automotrices. El responsable
de los datos personales es el Departamento de Tecnologías Avanzadas, perteneciente a la Subdirección Académica de la Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas del IPN, donde el interesado podrá ejercer
los derechos de acceso y corrección en la dirección: Av. Instituto Politécnico Nacional No. Col. Barrio la Laguna Ticomán, Gustavo A. Madero, México DF, CP. 07340, en el Edificio 1 primer piso. Lo anterior se informa en cumplimiento del
Decimoséptimo de los Lineamientos de Protección de Datos Personales, publicados en el Diario Oficial de la Federación el 30 de septiembre de 2005.
TÍTULO DEL PROTOCOLO
SISTEMA DE CONTROL VEHICULAR UTILIZANDO RECONOCIMIENTO DE PLACAS CON VISION ARTIFICIAL
DATOS DEL PROTOCOLO
Número de Revisión (Primera, segunda, tercera o Protocolo para Registro) 0 Semestre 2014-2015-I
Número Proyecto Asignado (Número asignado por el profesor de Especialidad)
- Fecha (Fecha programada)
-
Confidencialidad (Público o confidencial, incluir documento que lo avale)
- Número de Hojas (Cantidad de Hojas del Protocolo)
Patrocinador (En caso de existir, incluir el nombre en caso contrario dejar en blanco)
Número Convenio o Registro (Incluir número de convenio patrocinio o número de proyecto de investigación que patrocina)
´
ALUMNO 1
DATOS ALUMNO 1 FIRMA
Nombre del Alumno Yescas García Manuel Adrian
Número de boleta 2011640141
Teléfono 5513096122
Correo electrónico [email protected]
ALUMNO 2
DATOS ALUMNO 2 FIRMA
Nombre del Alumno
Número de boleta
Teléfono
Correo electrónico
ALUMNO 3
DATOS ALUMNO 3 FIRMA
Nombre del Alumno
Número de boleta
Teléfono
Correo electrónico
DATOS ASESOR 1 VISTO BUENO ASESOR 1
Nombre Asesor (Grado Académico)
Academia Interno Externo1
Cédula Profesional (Obligatorio)
Correo electrónico [email protected]
DATOS ASESOR 2 VISTO BUENO ASESOR 2
Nombre Asesor (Grado Académico)
Academia Interno Externo
Cédula Profesional (Obligatorio)
Correo electrónico
DATOS ASESOR 3 VISTO BUENO ASESOR 3
Nombre Asesor (Grado Académico)
Academia Interno Externo
Cédula Profesional (Obligatorio)
Correo electrónico
1 En caso de Asesores Externos, deberá incluirse copia de su Cédula Profesional y Curriculum Vitae resumido en un archivo anexo al Protocolo.

Índice Resumen .......................................................................................................................................................... 4
Planteamiento del problema .......................................................................................................................... 4
Objetivo general .............................................................................................................................................. 4
Objetivos particulares ..................................................................................................................................... 4
Justificación del problema.............................................................................................................................. 5
Marco teórico ................................................................................................................................................... 5
Sistemas de visión artificial ............................................................................................................................ 5
Sensores ......................................................................................................................................................... 5
Iluminación .................................................................................................................................................... 6
Iluminación tipo LED ...................................................................................................................................... 6
Flash ............................................................................................................................................................... 6
Láser ............................................................................................................................................................... 6
Lámpara Incandescente ................................................................................................................................. 7
Lámparas Fluorescentes ................................................................................................................................ 7
Tarjetas digitalizadoras .................................................................................................................................. 7
Análisis de Imágenes Digitales ....................................................................................................................... 7
Preprocesado ................................................................................................................................................. 7
Segmentación ................................................................................................................................................ 8
Descripción..................................................................................................................................................... 8
Reconocimiento ............................................................................................................................................. 8
Procesamiento digital de imágenes ............................................................................................................... 8
Proceso de filtrado ......................................................................................................................................... 8
Filtrado en el dominio de la frecuencia ......................................................................................................... 9
Tipos ............................................................................................................................................................... 9
-Filtro paso bajo: ............................................................................................................................................ 9
-Filtro paso alto: ........................................................................................................................................... 10
-Filtro paso banda ........................................................................................................................................ 10
Ventajas ....................................................................................................................................................... 10
Desventajas .................................................................................................................................................. 10
Filtrado en el dominio del espacio ............................................................................................................... 10
-Filtros lineales ............................................................................................................................................. 11
-Filtros no lineales. ....................................................................................................................................... 11
Tipos ............................................................................................................................................................. 11

Filtro paso bajo (suavizamiento): ................................................................................................................. 11
-Filtro paso alto (atenuamiento): ................................................................................................................. 12
-Realce de bordes por desplazamiento y diferencia:................................................................................... 12
-Realce de bordes mediante Laplace: .......................................................................................................... 12
-Resalte de bordes con gradiente direccional ............................................................................................. 12
-Detección de bordes y filtros de contorno (Prewitt y Sobel): .................................................................... 12
Propuesta de solución .................................................................................................................................. 13
Bibliografía ..................................................................................................................................................... 13

Resumen
El prototipo tiene como principal objetivo realizar un control vehicular mediante el reconocimiento óptico de patrones de la placa de un vehículo, esto por media una cámara fotográfica. En base a la información recopilada se almacenara en una base de datos y será procesada en una plataforma de desarrollo en tiempo real con el fin de permitir la entrada y/o salida de vehículos.
Nuestro sistema básicamente consiste en capturar la imagen de la placa del vehículo, y
por medio de un proceso de acondicionamiento, se obtendrá los patrones y caracteres de
la placa, este será almacenado en una base de datos, que a su vez será comparado con
datos previamente ingresados en la misma, de estar contenido en ella activara un
mecanismo capaz de levantar la puerta de acceso para una próxima arribada al recinto.
Palabras clave: Visión artificial, Control vehicular.
Planteamiento del problema
En nuestros días, el control de acceso a diferentes espacios destinados para la industria es un problema debido a los métodos ineficientes empleados para permitir o prohibir el mismo. Estos tienen diferentes fines ya que pueden ser utilizados para proteger recursos materiales de la empresa, así como también conceder el acceso a individuos selectos para implementar la seguridad en dicho lugar. La seguridad de las empresas privadas es prioridad ya que al ingresar un vehículo, para un óptimo control de la misma, se requiere anotar la fecha, hora y placa de su ingreso. Pero esto se vuelve desgastante para el conductor. Otro punto a destacar es que la persona delegada para dicha tarea llega a incorporar información errónea, dando como resultado un pésimo control una próxima revisión. Con base a lo mencionado anteriormente se implementa un sistema de adquisición de imágenes con la finalidad de identificar los diferentes patrones de las placas de vehículos en tiempo real, con la finalidad de brindar una solución. Tomando en cuenta que al momento de capturar nuestra imagen surgen inconvenientes como lo es la iluminación de la ubicación de la placa y la posición, estos establecen circunstancias que pueden influir en el correcto funcionamiento. En base a esto, se deben utilizar diferentes algoritmos para poder sobrepasar dichos problemas.
Objetivo general
Implementar un sistema para el reconocimiento de patrones de las placas de vehículos con la principal función de vigilancia, con el fin de automatizar la entrada y salida de estos.
Objetivos particulares
-Instalar un sistema de adquisición de imágenes. Se establecen una serie de parámetros útiles para la correcta captura de imagen, tales como: altura para una correcta adquisición de imágenes. Una vez establecidos nuestros componentes para nuestro sistema, se procederá a un test de pruebas para un óptimo funcionamiento.
sandra
Resaltado
sandra
Resaltado
sandra
Resaltado
sandra
Resaltado
sandra
Nota adhesiva
Con base en
sandra
Resaltado
sandra
Resaltado
sandra
Nota adhesiva
¿No tendrás complicaciones con este término?, lo anoto porque en Telemática es un término muy polémico
sandra
Resaltado
sandra
Nota adhesiva
Todo el documento debe redactarse en tercera persona, ejemplo: el sistema...
sandra
Resaltado
sandra
Resaltado
sandra
Nota adhesiva
En el resumen existen faltas de ortografía y errores de sintaxis, que confunden al lector, cuidar esta parte
sandra
Nota adhesiva
También en el resumen habría que mencionar la parte de visión artificial
sandra
Nota adhesiva
Tal ves placa también sea un término importante
sandra
Resaltado
sandra
Nota adhesiva
Redacción
sandra
Resaltado
sandra
Resaltado
sandra
Nota adhesiva
se buscará realizar un sistema...
sandra
Resaltado
sandra
Resaltado
sandra
Nota adhesiva
Mejorar la redacción
sandra
Nota adhesiva
Tal vez podría quedar mejor así: implementar un sistema para el reconocimiento de patrones de placas vehículares con el fin de automatizar su entrada y salida en espacios con acceso controlado.
sandra
Nota adhesiva
Los objetivos no se justifican, ni se argumentan, la estructura debe ser la misma que la del objetivo general. Las áreas funcionales te pueden servir de guía para establecer los objetivos particulares.

-Implementar el reconocimiento de patrones de distintas placas. En este punto se plantearan los diferentes procesos que se van a realizar para la implementación del algoritmo para la detección de las placas.
Justificación del problema
Nuestro sistema se puede emplear en estacionamientos de lugares públicos como lo son centros comerciales, bancos, tiendas de autoservicio, esto con la finalidad de automatizar el ingreso y salida de vehículos, así mismo agiliza el flujo de automóviles, llegando a brindar un mejor servicio y un notable aumento en la producción.
En algunos sistemas de control vehicular se establece el acceso por medio de una tarjeta, la cual se debe acercar a un lector que está en la entrada del recinto, aunado a esto existen diferentes percances que pueden existir, uno de ellos es un mal funcionamiento en el lector, falsificación de tarjetas, o sencillamente la perdida de la misma. En estos casos, un segundo sistema podría ser otra opción para el acceso al estacionamiento. En otros casos se hace uso del recurso humano, esto podría llegar a desestimarse ya que no es del todo preciso, siendo además que exige un gasto, el cual es innecesario.
Marco teórico
Sistemas de visión artificial
Los sistemas de visión artificial han evolucionado poco a poco a medida que la tecnología ha evolucionado y ha permitido la creación de sensores, computadoras y algoritmos de procesamiento más potentes.
De forma básica un sistema de visión artificial está conformado por varios subsistemas capaces de realizar dos funciones básicas:
1. Captar la información de la escena real mediante la proyección en una imagen.
2. Analizar las imágenes para extraer la información que contienen.
Los sensores, la iluminación y las tarjetas digitalizadoras son los dispositivos más importantes en la captura de la información de las escenas reales; en cambio el mayor peso del análisis de las imágenes captadas se encuentra a nivel de software aunque en ocasiones se encuentran dispositivos que realizan la extracción de la información utilizando hardware especializado.
Sensores
Existe gran diversidad de sensores a partir de los cuales se pueden obtener imágenes. Su principal clasificación es a partir de la naturaleza de la señal que conforman la imagen, dentro de ellos podemos mencionar, los sensores de Rayos X, Rayos Gamma, luz ultravioleta, infrarroja, etc. Por otra parte podemos mencionar los sensores basados en el principio del eco como es el caso de los radares y los equipos de ultrasonido.
sandra
Resaltado
sandra
Nota adhesiva
Sólo anota el título de justificación
sandra
Nota adhesiva
Cuidado con los tiempos verbales, el trabajo aún no se realiza
sandra
Nota adhesiva
Cuidado con estas afirmaciones, en este momento quedan fuera de sus alcances, para afirmar algo como ésto necesitan realizar un estudio de mercado.
sandra
Nota adhesiva
La parte esencial de la justificación radica en establecer la aportación tecnológica, es decir, la diferencia que existe con otros trabajos similares, en caso de que no existan, habrá que decir que aún no se desarrollan
sandra
Nota adhesiva
Falta referenciar el marco teórico, y no anotas los antecedentes, ¿no existen trabajos que ya se hayan hecho y guarden características similares al tuyo?

La variedad de sensores utilizados en sistemas de visión artificial se ha expandido hasta dominios insospechados en este aspecto estos sistemas superan ampliamente al sistema de visión humano el cual sólo puede tomar información visual dentro del espectro visible. Sin embargo no cabe duda que los sensores más utilizados, en aplicaciones que requieran de este tipo de sistemas, son la cámaras ya sean estas fotográficas o de video.
Las cámaras son las encargadas de captar la información luminosa de la escena a analizar y convertirla en una señal, analógica o digital, para ser utilizada por los sistemas de procesamiento. Existen varios tipos de cámaras digitales, las cuales se dividen en función de:
Modo de captar la información de la escena. Dentro de esta categoría se pueden mencionar las cámaras basadas en tecnología Vidicom, Orticom y CCD.
Modo de exploración. Aquí se encuentran las cámaras de exploración de línea y área.
Estado sólido y no sólido.
Iluminación
La iluminación de una escena es uno de los puntos sensibles en un sistema de visión. Las fuentes de luz se deben escoger en función de la aplicación que se desea realizar, una fuente mal escogida puede traer consigo un sin número de anormalidades difíciles de eliminar como son el caso de las sombras, las reflexiones y el bajo contraste. Es por ello que el conocimiento del tipo de iluminación a utilizar se debe tener muy en cuenta.
Iluminación tipo LED
La luz emitida por este tipo de fuente presenta como ventaja fundamental que tiene naturaleza monocromática, estos dispositivos presentan una larga vida útil, alto rendimiento y requieren de una fuente de alimentación de muy baja potencia además presentan un costo excesivamente bajo. Sus principales desventajas son que emiten poca intensidad y que en ocasiones dos LEDs similares presentan diferencias en la longitud de onda de la luz que emiten.
Flash
Normalmente se utilizan para captar imágenes en movimiento, son fuentes de luz de gran intensidad luminosa que se ve poco afectada por la luz ambiente. Su principal desventaja es la fuente de alimentación las cuales deben estar bien sincronizadas con el sistema de captura de la imagen, presentan gran disipación de calor y pierden luminosidad con el tiempo. A su favor podemos decir que son fuentes extremadamente rápidas.
Láser
Muchos hemos escuchado hablar de lo extremadamente direccional de la luz emitida por este tipo de fuente además presenta la característica de ser monocromática. Se postula como una fuente de luz casi perfecta aunque su inconveniente principal es su costo y la necesidad de colocarle dispositivos auxiliares para realizar barridos de la zona de interés.

Lámpara Incandescente
Su iluminación es bastante homogénea aunque presenta las dificultades de ser consumidoras y disipadoras de calor.
Lámparas Fluorescentes
Su iluminación es muy clara aunque presentan tiempos de vida cortos y las pérdidas de iluminación con el tiempo son acentuadas.
Tarjetas digitalizadoras
La función de estas tarjetas es captar la señal que ofrece el sensor de imagen y convertirla a formato digital y entregarla al dispositivo inteligente, llámese PC o PLC, para su posterior análisis. Una muestra de este tipo de dispositivo se observa en la siguiente figura.
Las funciones principales que realiza este tipo de dispositivo son:
1. Recoger la señal analógica procedente de la cámara.
2. Convertir la señal analógica en digital.
3. Almacenar la señal digital en memoria.
Las tarjetas comerciales incluyen: Memoria propia, funciones de procesado, conversores digital-analógico y analógico-digital e incluso presentación en pantalla de la imagen.
Análisis de Imágenes Digitales
Una vez captada la imagen por el sensor y transmitida al dispositivo donde será procesada, el paso siguiente es realizar la extracción de la información explícita que encierra dicha imagen, por ejemplo posición de los objetos, forma, textura etc. Las técnicas utilizadas para realizar la extracción de esta información se dividen en cuatro grupos fundamentales:
1. Preprocesado.
2. Segmentación.
3. Descripción.
4. Reconocimiento.
Preprocesado
Este grupo de funciones se especializa en realizarle mejoras a la imagen captada, es decir resalta un sin número de características que conllevan a elevar la calidad de la imagen a la hora de ser analizada. Dentro de las funciones más comunes se encuentra la eliminación del ruido, el cambio de contraste y brillo, las transformaciones geométricas dentro de otras.

Segmentación
La clasificación de la escena en sus partes u objetos es a lo que se le llama segmentación de la imagen. Estas técnicas se basan en encontrar dónde se encuentran grupos de pixels que conformen un ente a clasificar (objeto), para ello estas técnicas se basan en los principios de discontinuidad y similitud. La siguiente figura nos visualiza una muestra metalográfica en la cual son detectados todos los granos de la misma y son etiquetados con diferentes colores indicando su fronteras.
Descripción
Estas técnicas se basan en extraer, del ente a estudiar, las características que lo diferencian de los demás. Para realizar esta extracción de características es necesario realizar un estudio del objeto a analizar y extraer con cuidado las características invariantes que posea. Éstas deben ser, generalmente, independientes a rotaciones, escalamientos corrimientos de dicho objeto. Dentro de estas características podemos mencionar, área perímetro, circularidad, patrones de texturas, rasgos de formas, etc.
Reconocimiento
Una vez obtenidas las características que describen el objeto a estudiar, se pasa al reconocimiento del mismo, esto no es más que la clasificación, utilizando cualquier técnica conocida, llámese inteligencia artificial, búsquedas deductivas en base de datos, comparación con patrones etc. Dentro de las técnicas más utilizadas se encuentra la utilización de redes neuronales artificiales, algoritmos genéticos y métodos estadísticos avanzados.
Procesamiento digital de imágenes
El procesamiento digital de imágenes es el conjunto de técnicas que se aplican a las imágenes digitales con el objetivo de mejorar la calidad o facilitar la búsqueda de información.
Proceso de filtrado
Es el conjunto de técnicas englobadas dentro del preprocesamiento de imágenes cuyo
objetivo fundamental es obtener, a partir de una imagen origen, otra final cuyo resultado
sea más adecuado para una aplicación específica mejorando ciertas características de la
misma que posibilite efectuar operaciones del procesado sobre ella.
Los principales objetivos que se persiguen con la aplicación de filtros son:
-Suavizar la imagen: reducir la cantidad de variaciones de intensidad entre píxeles vecinos.
-Eliminar ruido: eliminar aquellos píxeles cuyo nivel de intensidad es muy diferente al de
sus vecinos y cuyo origen puede estar tanto en el proceso de adquisición de la imagen
como en el de transmisión.
-Realzar bordes: destacar los bordes que se localizan en una imagen.
-Detectar bordes: detectar los píxeles donde se produce un cambio brusco en la función
intensidad.
Por tanto, se consideran los filtros como operaciones que se aplican a los píxeles de una
imagen digital para optimizarla, enfatizar cierta información o conseguir un efecto especial
en ella.
El proceso de filtrado puede llevarse a cabo sobre los dominios de frecuencia y/o espacio.
Filtrado en el dominio de la frecuencia
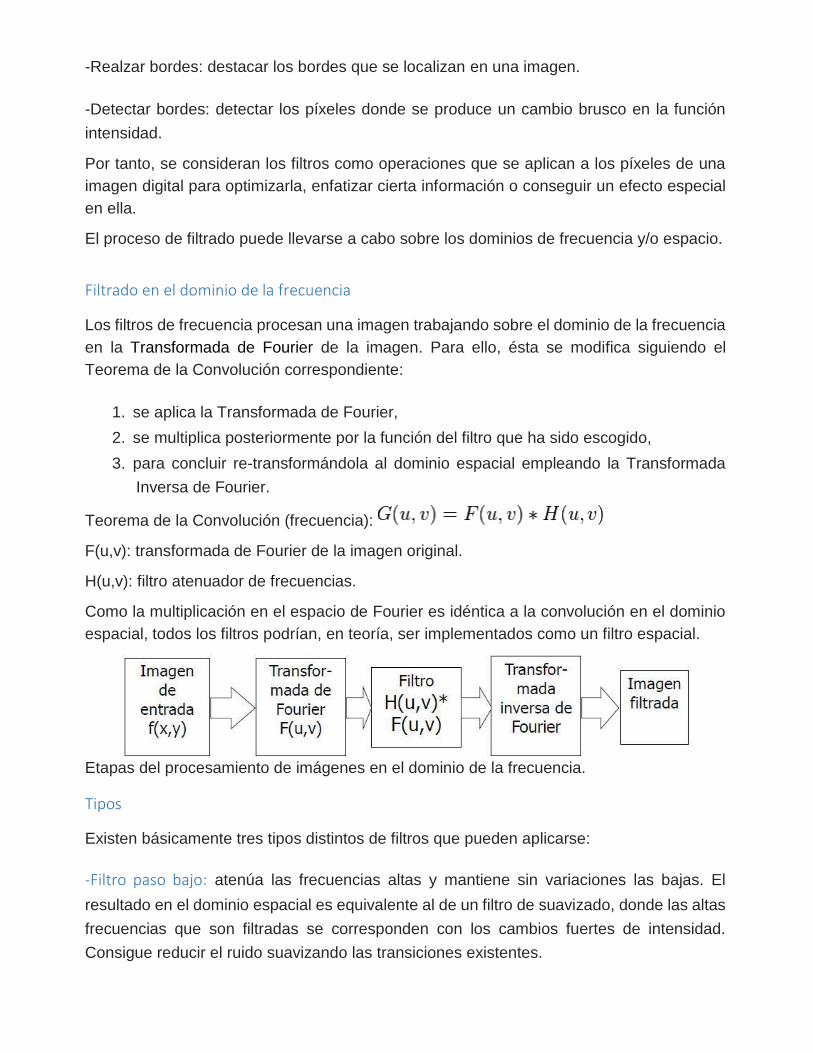
Los filtros de frecuencia procesan una imagen trabajando sobre el dominio de la frecuencia
en la Transformada de Fourier de la imagen. Para ello, ésta se modifica siguiendo el
Teorema de la Convolución correspondiente:
1. se aplica la Transformada de Fourier,
2. se multiplica posteriormente por la función del filtro que ha sido escogido,
3. para concluir re-transformándola al dominio espacial empleando la Transformada
Inversa de Fourier.
Teorema de la Convolución (frecuencia):
F(u,v): transformada de Fourier de la imagen original.
H(u,v): filtro atenuador de frecuencias.
Como la multiplicación en el espacio de Fourier es idéntica a la convolución en el dominio
espacial, todos los filtros podrían, en teoría, ser implementados como un filtro espacial.
Etapas del procesamiento de imágenes en el dominio de la frecuencia.
Tipos
Existen básicamente tres tipos distintos de filtros que pueden aplicarse:
-Filtro paso bajo: atenúa las frecuencias altas y mantiene sin variaciones las bajas. El
resultado en el dominio espacial es equivalente al de un filtro de suavizado, donde las altas
frecuencias que son filtradas se corresponden con los cambios fuertes de intensidad.
Consigue reducir el ruido suavizando las transiciones existentes.

-Filtro paso alto: atenúa las frecuencias bajas manteniendo invariables las frecuencias altas.
Puesto que las altas frecuencias corresponden en las imágenes a cambios bruscos de
densidad, este tipo de filtros es usado, porque entre otras ventajas, ofrece mejoras en la
detección de bordes en el dominio espacial, ya que estos contienen gran cantidad de dichas
frecuencias. Refuerza los contrastes que se encuentran en la imagen.
-Filtro paso banda: atenúa frecuencias muy altas o muy bajas manteniendo una banda de
rango medio.
Ventajas
-Método simple y sencillo de implementar.
-Fácil asociación del concepto de frecuencia con ciertas características de la imagen;
cambios de tonalidad suaves implican frecuencias bajas y cambios bruscos frecuencias
altas.
-Proporciona flexibilidad en el diseño de soluciones de filtrado.
-Rapidez en el filtrado al utilizar el Teorema de la Convolución.
Desventajas
-Se necesitan conocimientos en varios campos para desarrollar una aplicación para el
procesamiento de imágenes.
-El ruido no puede ser eliminado completamente.
Filtrado en el dominio del espacio
Las operaciones de filtrado se llevan a cabo directamente sobre los píxeles de la imagen.
En este proceso se relaciona, para todos y cada uno de los puntos de la imagen, un conjunto
de píxeles próximos al píxel objetivo con la finalidad de obtener una información útil,
dependiente del tipo de filtro aplicado, que permita actuar sobre el píxel concreto en que se
está llevando a cabo el proceso de filtrado para, de este modo, obtener mejoras sobre la
imagen y/o datos que podrían ser utilizados en futuras acciones o procesos de trabajo sobre
ella.

Los filtros en el dominio del espacio pueden clasificarse en:
-Filtros lineales (filtros basados en kernels o máscaras de convolución).
-Filtros no lineales.
El concepto de kernel se entiende como una matriz de coeficientes donde el entorno del
punto (x,y) que se considera en la imagen para obtener g(x,y) está determinado por el
tamaño y forma del kernel seleccionado. Aunque la forma y tamaño de esta matriz es
variable y queda a elección de cada usuario, es común el uso de kernels cuadrados nxn.
Dependiendo de la implementación, en los límites de la imagen se aplica un tratamiento
especial (se asume un marco exterior de ceros o se repiten los valores del borde) o no se
aplica ninguno. Es por ello, que el tipo de filtrado queda establecido por el contenido de
dicho kernel utilizado.
Para realizar un filtrado en el dominio del espacio se realiza una convolución (barrido) del
kernel sobre la imagen. Para ello se sigue el Teorema de Convolución en el espacio: g(x,y)
= h(x,y) * f(x,y)
1. Cada píxel de la nueva imagen se obtiene mediante el sumatorio de la multiplicación
del kernel por los píxeles contiguos:
g(x,y) = ∑∑ f(i,j) w(i,j)
2. Generalmente se divide sobre cierto valor constante para normalizar que suele
obtenerse de la suma de los valores del kernel empleado.
Tipos
Filtro paso bajo (suavizamiento): utilizados para eliminar ruido o detalles pequeños de poco
interés puesto que sólo afecta a zonas con muchos cambios. La frecuencia de corte se
determina por el tamaño del kernel y sus coeficientes. Se emplean diversos kernels:
-Promedio: promedio de píxeles vecinos (kernel de unos).

-Paso bajo en frecuencia.
-Media: reemplaza cada píxel por el valor medio de sus contiguos.
-Mediana: sustituye por el valor de la mediana de los píxeles vecinos (normalmente se
comporta mejor que el de promedio).
-Gaussiano: aproximación a la distribución gaussiana.
-Filtro paso alto (atenuamiento): intensifica los detalles, bordes y cambios de alta
frecuencia, mientras que atenúa las zonas de tonalidad uniforme. Esto permite una mejor
identificación posterior de los objetos que se encuentren en la imagen, puesto que el brillo
se hace mayor en las zonas con frecuencias más altas, al mismo tiempo que se oscurecen
las zonas de frecuencias bajas. Es común la aparición de ruido tras el proceso.
-Realce de bordes por desplazamiento y diferencia: sustrae de la imagen original una copia
desplazada de la misma. Así, es posible localizar y hacer resaltar los bordes existentes y
que se quieran obtener según el modelo de kernel aplicado:
-Horizontal.
-Vertical.
-Horizontal/Vertical (diagonal).
-Realce de bordes mediante Laplace: este tipo de filtros realza los bordes en todas
direcciones (los resultados que se obtienen pueden considerarse como una “suma” de los
obtenidos tras aplicar todos los modelos del tipo anterior). En esta ocasión se trabaja con
la segunda derivada, que permite obtener unos mejores resultados, a pesar del aumento
del ruido que se produce en la imagen.
-Resalte de bordes con gradiente direccional: empleado para destacar y resaltar con mayor
precisión los bordes que se localizan en una dirección determinada. Trabaja con los
cambios de intensidad existentes entre píxeles contiguos.
-Detección de bordes y filtros de contorno (Prewitt y Sobel): al igual que los anteriores, se
centra en las diferencias de intensidad que se dan pixel a pixel. Son utilizados para obtener
los contornos de objetos y de este modo clasificar las formas existentes dentro de una
imagen. Este tipo de filtros requieren un menor coste computacional.
Propuesta de solución
Dado el problema expuesto, se propone un sistema que hace uso de la visión artificial
auxiliándose con software para una correcta adquisición de datos y así poder diagnosticar
los diferentes aspectos de la imagen capturada. Por medio de dichas herramientas se
reconocerá de manera inmediata y automática los patrones que hay dentro de la imagen
capturada para reunir toda la información.
Nuestro prototipo contendrá diferentes procesos para llevar a cabo la calibración de una cámara la cual será utilizada para la captura de las placas de los vehículos. Se establecerán los parámetros necesarios para la instalación de software y hardware; así mismo se planea determinar los óptimos componentes para una óptima adquisición de imágenes. Para esto, se dividió la solución en subsistemas 1. Implementación del sistema de adquisición de imágenes. 2. Adquisición. 3. Detección patrones y caracteres de la placa. 4. Implementación del mecanismo de accionamiento.
Bibliografía
http://www.ecured.cu/index.php/Visi%C3%B3n_Artificial
http://es.wikipedia.org/wiki/Procesamiento_digital_de_im%C3%A1genes
sandra
Nota adhesiva
La bibliografía es pobre aún, recuerda que wikipedia no es una fuente bien vista. ¿Qué estilo de citación vas a utilizar?
sandra
Nota adhesiva
Me parece que le falta desarrollo a tu propuesta de solución.