sistem non linier Lyapunov Stability

If you can't read please download the document
-
Upload
ardian-gundrunk-pratama -
Category
Education
-
view
31 -
download
4
Transcript of sistem non linier Lyapunov Stability
PowerPoint Presentation
LYAPUNOV STABILITYNama: Hendra Ardianto Rizka PratamaNIM: 1410501024Dosen Pembimbing : R., Suryoto Edi Raharjo, ST., M.EngFakultas: Teknik elektroUniversitas Tidar
Sistem Non Linier
Lyapunov StabilityLyapunov stability is named after Aleksandr Lyapunov, a Russian mathematician who published his book The General Problem of Stability of Motion in 1892. Lyapunov was the first to consider the modifications necessary in nonlinear systems to the linear theory of stability based on linearizing near a point of equilibrium.
Lyapunov Stabilityequilibrium point xeq 2 Rn for which f(xeq) = 0thus x(t) = xeq 8 t 0 is a solution to the ODE
E.g., pendulum equation
qmltwo equilibrium points:x1 = 0, x2 = 0 (down)andx1 = p, x2 = 0 (up)
Lyapunov stability equilibrium point xeq 2 Rn for which f(xeq) = 0thus x(t) = xeq 8 t 0 is a solution to the ODE
Definition (ed definition):The equilibrium point xeq 2 Rn is (Lyapunov) stable if8 e > 0 9 d >0 : ||x(t0) xeq|| d ) ||x(t) xeq|| e 8 t t0 0
xeq
d
e
x(t) if the solution starts close to xeq it will remain close to it forevere can be made arbitrarily small by choosing d sufficiently small
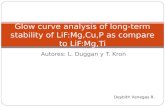
Example: Pendulum
xeq=(0,0)stablexeq=(p,0)unstable
qml
x1 is an angle so you must glue left to right extremes of this plot
continuity definition
Definition (continuity definition):The equilibrium point xeq 2 Rn is (Lyapunov) stable if T is continuous at xeq:8 e > 0 9 d >0 : ||x0 xeq|| d ) ||T(x0) T(xeq)||sig eXsig set of all piecewise continuous signals taking values in RnGiven a signal x2Xsig, ||x||sig supt0 ||x(t)||ODE can be seen as an operatorT : Rn ! Xsigthat maps x0 2 Rn into the solution that starts at x(0) = x0
supt0 ||x(t) xeq|| e
xeq
d
e
x(t)can be extended to nonequilibrium solutions
Stability of arbitrary solutions
Definition (continuity definition):A solution x*:[0,T)!Rn is (Lyapunov) stable if T is continuous at x*0 x*(0), i.e.,8 e > 0 9 d >0 : ||x0 x*0|| d ) ||T(x0) T(x*0)||sig eXsig set of all piecewise continuous signals taking values in RnGiven a signal x2Xsig, ||x||sig supt0 ||x(t)||ODE can be seen as an operatorT : Rn ! Xsigthat maps x0 2 Rn into the solution that starts at x(0) = x0signal normsupt0 ||x(t) x*(t)|| e
dex(t)
x*(t)
pend.m
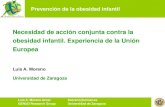
Van der Pol oscillator
x* Lyapunov stablevdp.m
Stability of arbitrary solutionsE.g., Van der Pol oscillator
x* unstable
Asymptotic stability
Definition:The equilibrium point xeq 2 Rn is (globally) asymptotically stable if it is Lyapunov stable and for every initial state the solution exists on [0,1) andx(t) ! xeq as t!1.
xeq
x(t)
s
a(s)equilibrium point xeq 2 Rn for which f(xeq) = 0class K set of functions a:[0,1)