
SÍNTESIS RECTIFICADA DE MECANISMOS PLANOS DE …¡lisis y Síntesis... · de mecanismos planos de...
72
Universidad de Guanajuato División de Ingenierías Campus Irapuato-Salamanca SÍNTESIS RECTIFICADA DE MECANISMOS PLANOS DE CUATRO BARRAS PARA GUÍA DE CUERPO RÍGIDO TESIS PROFESIONAL PARA OBTENER EL TÍTULO DE INGENIERO EN MECATRÓNICA Presenta Moisés Isaías Acosta Vega Codirectores Dr. José María Rico Martínez Dr. J. Jesús Cervantes Sánchez Salamanca, Gto., Julio del 2014.
Transcript of SÍNTESIS RECTIFICADA DE MECANISMOS PLANOS DE …¡lisis y Síntesis... · de mecanismos planos de...

Universidad de GuanajuatoDivisión de Ingenierías Campus Irapuato-Salamanca
SÍNTESIS RECTIFICADA DE MECANISMOSPLANOS DE CUATRO BARRAS PARA GUÍA
DE CUERPO RÍGIDO
TESIS PROFESIONAL
PARA OBTENER EL TÍTULO DEINGENIERO EN MECATRÓNICA
Presenta
Moisés Isaías Acosta Vega
CodirectoresDr. José María Rico Martínez
Dr. J. Jesús Cervantes Sánchez
Salamanca, Gto., Julio del 2014.


A mis padres y hermanos.A la vida misma y al corazón atómico de la vía láctea.

AgradecimientosLa gratitud es la memoria del corazón.
Jean Baptiste Massieu
Agradezco a toda mi familia, a mis padres Rita y José, por la educación y atenciones queme dieron desde mi niñez, por el apoyo y motivación que recibí a lo largo de mi formaciónacadémica y personal hasta concluir mis estudios Universitarios y que indudablemente segui-ré recibiendo. Hago especial mención a mi madre por las atenciones y cuidados en momentosdifíciles durante mis estudios, atenciones y cuidados que solo una madre puede dar, graciasmamá. A mis hermanos Elizabeth, Domingo y Emanuel por animarme a cumplir mi objetivode convertirme en Ingeniero en Mecatrónica a su peculiar manera.
Agradezco enormemente al Dr. José María Rico Martínez, mi asesor, por darme la opor-tunidad de trabajar con él, primero brindándole apoyo docente y ahora en el desarrollo delpresente trabajo de tesis, por su paciencia apoyo y confianza. A el codirector Dr. J. Jesús Cer-vantes Sánchez y sinodales Dr. Luz Antonio Aguilera Cortés y Dr. Maximino Antonio GonzálesPalacios, por sus atinadas observaciones, recomendaciones y correcciones a mi trabajo. Graciaspor todo su tiempo invertido en la revisión de esta tesis.
A la Universidad de Guanajuato, por abrirme las puertas, acogerme y formarme académicay profesionalmente. A Conacyt por brindarme una beca para la finalización de este trabajo.Agradezco a mis compañeros y amigos: Mónica, Edgar y Oscar por dejarme ser partícipe de supreparación y ser parte de la mía, por el apoyo mutuo que nos dimos y por esas experienciasinigualables que atesorare el resto de mis días. A todos mis amigos, porque sin ellos no hubierasido igual de divertida e intensa esta etapa de mi vida. Y a todos los que directa e indirectamentecolaboraron con este trabajo de tesis.

Índice general
Agradecimientos iv
Índice de figuras viii
Índice de tablas ix
1. Introducción 11.1. Diferentes tipos de síntesis cinemática. . . . . . . . . . . . . . . . . . . . . . . . 11.2. Diferentes tareas de la síntesis de mecanismos planos. . . . . . . . . . . . . . . . 11.3. Número de diferentes posiciones de precisión. . . . . . . . . . . . . . . . . . . . . 21.4. Una breve revisión del estado del arte. . . . . . . . . . . . . . . . . . . . . . . . 31.5. Objetivo de la tesis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.6. Descripción de la tesis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Determinación de las curvas de Burmester 72.1. Síntesis de mecanismos para dos y tres posiciones de precisión. . . . . . . . . . . 7
2.1.1. Síntesis con dos posiciones de precisión. . . . . . . . . . . . . . . . . . . . 82.1.2. Determinación del desplazamiento del origen. . . . . . . . . . . . . . . . 102.1.3. Síntesis de mecanismos con dos puntos de precisión. . . . . . . . . . . . . 11
2.2. Polos de rotación asociados a 2, 3 y 4 posiciones de precisión. . . . . . . . . . . . 112.2.1. Síntesis con tres posiciones de precisión. . . . . . . . . . . . . . . . . . . 132.2.2. Síntesis de mecanismos con tres puntos de precisión mediante pares pris-
máticos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3. Síntesis con cuatro puntos de precisión. . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1. Determinación de las curvas de Burmester. . . . . . . . . . . . . . . . . . 182.3.2. Propiedades Generales de las Curvas de Burmester. . . . . . . . . . . . . 21
2.4. Ramales en las curvas de Burmester. . . . . . . . . . . . . . . . . . . . . . . . . 222.5. Información adicional de las curvas de Burmester. . . . . . . . . . . . . . . . . . 25
3. Defectos de orden, ramal y Grashoff 293.1. Rectificación del problema de orden. . . . . . . . . . . . . . . . . . . . . . . . . 293.2. Rectificación del problema de ramal. . . . . . . . . . . . . . . . . . . . . . . . . 303.3. Rectificación del problema de Grashoff. . . . . . . . . . . . . . . . . . . . . . . . 31
4. Descripción del programa gráfico para la síntesis 334.1. La interfaz gráfica del programa. . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.1.1. Descripción de la barra de iconos. . . . . . . . . . . . . . . . . . . . . . . 344.1.2. Descripción de las herramientas para la síntesis. . . . . . . . . . . . . . . 34
4.2. Determinación de las curvas de Burmester. . . . . . . . . . . . . . . . . . . . . . 364.3. Rectificación del error de orden. . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.4. Rectificación del error de ramal. . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
v

vi ÍNDICE GENERAL
4.5. Rectificación del error de Grashoff. . . . . . . . . . . . . . . . . . . . . . . . . . 36
5. Ejemplos y resultados 375.1. Síntesis rectificada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.2. Síntesis con defecto de ramal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.3. Síntesis con defecto de orden. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.4. Síntesis con defecto de Grashoff. . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6. Conclusiones y trabajo futuro 49
Apéndices 51
Apéndice A.Determinación del Punto de Ball 53
Apéndice BEjecución del programa interactivo 57
Apéndice CDiagrama de secuencia general para la ejecución del programa 59
Referencias 61

Índice de figuras
2.1. Definición del mapeo euclidiano. . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2. Interpretación geométrica del proceso de síntesis con dos puntos de precisión. . . 112.3. Interpretación geométrica del proceso de localización del polo de rotación. . . . . 132.4. Determinación de los polos de rotación y polos imagen para tres posiciones de
precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5. Determinación de los polos de rotación y polos imagen para cuatro posiciones de
precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.6. Círculo de correderas para la síntesis de mecanismos para guía de cuerpo rígido
con tres puntos de precisión mediante pares prismáticos . . . . . . . . . . . . . . 172.7. Problema de síntesis cinemática de un mecanismo plano de cuatro barras para
guía de cuerpo rígido con dos posiciones de precisión. . . . . . . . . . . . . . . . 192.8. Mecanismo equivalente cuyos eslabones tienen como longitud la norma de los
números complejos dados por ∆1, ∆2, ∆3, ∆4. . . . . . . . . . . . . . . . . . . . 202.9. Ejemplo de curvas de Burmester con un único ramal. . . . . . . . . . . . . . . . 242.10. Ejemplo de curvas de Burmester con dos ramales. . . . . . . . . . . . . . . . . . 26
3.1. Ejemplo del defecto de ramal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1. Interfaz gráfica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2. Barra de iconos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.3. Herramientas para la síntesis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.4. Identificación de puntos en las curvas de Burmester. . . . . . . . . . . . . . . . . 36
5.1. Curvas de Burmester en la interfaz gráfica. . . . . . . . . . . . . . . . . . . . . . 385.2. Eslabón seguidor sintetizado y construcción de Filemon. . . . . . . . . . . . . . 385.3. Mecanismo sintetizado con la interfaz. . . . . . . . . . . . . . . . . . . . . . . . 395.4. Ventana de simulación del mecanismo. . . . . . . . . . . . . . . . . . . . . . . . 395.5. Características del mecanismo sintetizado. . . . . . . . . . . . . . . . . . . . . . 405.6. Curvas de Burmester en la interfaz gráfica. . . . . . . . . . . . . . . . . . . . . . 415.7. Seleccion de eslabón seguidor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.8. Selección del eslabón motriz y final de la síntesis. . . . . . . . . . . . . . . . . . 415.9. Simulación del mecanismo sintetizado. . . . . . . . . . . . . . . . . . . . . . . . 425.10. Especificaciones del mecanismo sintetizado. . . . . . . . . . . . . . . . . . . . . . 425.11. Mecanismo sintetizado con defecto de ramal. . . . . . . . . . . . . . . . . . . . . 435.12. Simulación del mecanismo sintetizado con defecto de ramal. . . . . . . . . . . . 445.13. Simulación de la configuración cruzada del mecanismo sintetizado. . . . . . . . . 445.14. Mecanismo sintetizado con defecto de orden. . . . . . . . . . . . . . . . . . . . . 455.15. Simulación de mecanismo con defecto de orden. . . . . . . . . . . . . . . . . . . 465.16. Mecanismo sintetizado con defecto de Grashoff. . . . . . . . . . . . . . . . . . . 475.17. Simulacion del mecanismo sintetizado con defecto de Grashoff. . . . . . . . . . . 48
vii

viii ÍNDICE DE FIGURAS
A.1. Localización del sistema de referencia móvil Oxy respecto del sistema de refe-rencia fijo OXY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
B.1. Selección del directorio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57B.2. Ejecución de la interfaz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
C.1. Diagrama de secuencia general del programa interactivo. . . . . . . . . . . . . . 59

Índice de tablas
2.1. Posiciones de precisión de un ejemplo para ilustrar la información que arroja elprograma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2. Extracto de los resultados internos del programa de síntesis. . . . . . . . . . . . 27
5.1. Posiciones de precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.2. Posiciones de precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.3. Posiciones de precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.4. Posiciones de precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.5. Posiciones de precisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
ix

Resumen
El presente trabajo de tesis desarrolla un programa de cómputo interactivo para la síntesisde mecanismos planos de cuatro barras, para guía de cuerpo rígido, con cuatro posiciones deprecisión. El programa permite determinar y, si es necesario, refinar las curvas de Burmestery localizar en las curvas los polos de rotación y el punto de Ball entre otros elementos. Adi-cionalmente, el programa permite eliminar los errores de orden, ramal y Grashof que plagan lasíntesis de esta clase de mecanismos. El trabajo presenta además una breve revisión de la teoríadetrás de la síntesis de los mecanismos planos de cuatro barras para guía de cuerpo rígido eilustra la operación del programa con 5 ejemplos completamente terminados.
Abstract
The present bachellor of science thesis develops an interactive computer program for thekinematic synthesis of planar four bar linkages, for rigid body guidance, with four precisionpositions. The computer program determines and, if necessary, refines the so-called Burmestercurves and locates the rotation poles and Ball’s point among other elements. Furthermore, theprogram rectifies the order, branch and Grashof errors that are quite common in the synthesis ofthese linkages. The thesis also presents a brief introduction on the theory behind the kinematicsynthesis of planar linkages for rigid body guidance and shows the operation of the programwith 5 thoroughly finished examples.
Capítulo 1
Introducción
En este capítulo se presenta una breve revisión de la síntesis cinemática de mecanismos,partiendo de los diferentes tipos de síntesis, las diferentes tareas de la síntesis cinemática demecanismos planos, con énfasis en los mecanismos planos de cuatro barras, y el número delos posibles puntos o posiciones de precisión. Finalmente este capítulo presenta una brevedescripción del contenido del resto de la tesis.
1.1. Diferentes tipos de síntesis cinemática.De manera muy tradicional, la síntesis cinemática se divide en tres diferentes tipos o etapas;
la síntesis de tipo, la síntesis de número y la síntesis dimensional.
1. Síntesis de tipo. La síntesis de tipo trata con la determinación del tipo de mecanismo:Leva, engrane, mecanismos articulados o una combinación de estos tipos de mecanismos,que resulte más apropiado para resolver el problema bajo estudio. Se considera que elresultado de este tipo de síntesis está fuertemente influenciado por los conocimientos y laexperiencia previa del diseñador.
2. Síntesis de número. La síntesis de número intenta determinar el número de eslabones,el número de pares cinemáticos y el arreglo necesario de estos elementos para generar unmecanismo que tenga la movilidad, entre otras características, apropiada para resolver latarea deseada.
3. Síntesis dimensional. Una vez determinado el tipo de mecanismo, el número de esla-bones y pares cinemáticos y arreglo de estos elementos, se realiza la síntesis dimensionalque tiene por objeto determinar las dimensiones de los eslabones para que el mecanismosatisfaga la tarea que se desea realizar.
Es importante resaltar que estas tres etapas no se realizan de manera lineal, es frecuenteque, en especial, las dos primeras etapas se realicen de manera iterativa como si se tratará deun sistema de control retroalimentado.
1.2. Diferentes tareas de la síntesis de mecanismos planos.Hay muchos diferentes tipos de síntesis cinemática de mecanismos planos de cuatro barras,
sin embargo, las más comunes son de tres tipos
1. Síntesis para guía de cuerpo rígido. En este tipo de síntesis se desea que el eslabónacoplador de un mecanismo plano de cuatro barras desplace un cuerpo rígido a través de
1

2 CAPÍTULO 1. INTRODUCCIÓN
una secuencia de posiciones. En este caso, no sólo la posición de un punto del cuerpo rígidoes importante sino también la orientación del cuerpo rígido. Es evidente que el cuerpo aguiar debe estar rígidamente unido al eslabón acoplador pues si estuviera unido al eslabónconductor o conducido las posibles posiciones del cuerpo rígido estarían restringidas alconjunto de posiciones asociadas a la rotación alrededor de un eje común, aquel que pasaa través de la revoluta que une el eslabón fijo con el eslabón conductor o conducidorespectivamente.
2. Síntesis para generación de funciones. En este tipo de síntesis se desea que el ángulode rotación del eslabón conducido, denotado por θ4, aproxime una función del ángulo derotación del eslabón conductor, denotado por θ2; es decir
θ4 = f(θ2). (1.1)
En este caso, se dice que el mecanismo plano de cuatro barras “mecaniza” la función dadapor la ecuación (1.1). Puede probarse que la síntesis para generacíon de funciones, setransforma en un problema equivalente de síntesis para guía de cuerpo rígido.
3. Síntesis para generación de trayectoria. En este tipo de síntesis se desea que un puntodel eslabón acoplador de un mecanismo plano de cuatro barras aproxime una trayectoriadeterminada. En este caso, la orientación del eslabón acoplador no es de importancia.Es evidente que el punto que aproxima la trayectoria debe estar rígidamente unido aleslabón acoplador pues si estuviera unido al eslabón conductor o conducido las posiblestrayectorias del punto estarían restringidas a arcos de círculo cuyos centro sería la revolutaque une el eslabón fijo con el eslabón conductor o conducido respectivamente.
Existen otros tipos de síntesis en los cuales, por ejemplo, la posición del eslabón acopladordebe estar coordinada con el ángulo de rotación del eslabón conductor; sin embargo, estos casosmás especializados no han recibido mucha atención, quizás por lo limitado de su aplicación.
Un ejemplo muy sencillo de la interacción entre los diferentes tipos de síntesis cinemáticaocurre durante la síntesis para la generación de trayectoria. Se conoce que las curvas generadaspor los puntos que forman parte del eslabón acoplador —las cuales se denominan curvas deacoplador— de un mecanismo plano de cuatro barras son de sexto grado, mientras que lascurvas generadas por los puntos que forman parte de algunos de los eslabones de un mecanismode Stephenson son de doceavo grado. Por lo tanto, puede decirse de manera genérica que lascurvas generadas por los puntos que forman parte de un mecanismo de Stephenson ofrecen másposibilidades de síntesis que las curvas de acoplador de un mecanismo plano de cuatro barras.
1.3. Número de diferentes posiciones de precisión.Una vez seleccionada la tarea de síntesis que se desea realizar, debe determinarse el número
de posiciones de precisión —en algunas referencias se denominan puntos de precisión porquehistóricamente el primer tipo de síntesis que se desarrolló en los Estados Unidos de Norteaméricafue la síntesis para generación de funciones— que se desea que el mecanismo satisfaga de maneraexacta.
Puesto que el número de parámetros de un mecanismo plano, sea de cuatro barras, deWatt, de Stephenson, etc. es finito, es evidente que sin importar la tarea de síntesis que sedesea realizar, el número de posiciones o puntos de precisión que el mecanismo a sintetizardebe satisfacer de manera exacta es igualmente finito.
Puesto que la síntesis para la generación de funciones es equivalente a la síntesis para la guíade cuerpo rígido, el número máximo de posiciones de precisión que un mecanismo dado puede

1.4. UNA BREVE REVISIÓN DEL ESTADO DEL ARTE. 3
satisfacer es igual en ambos casos. Por otro lado, puesto que para la generación de trayectoria laorientación del cuerpo no es de importancia, intituivamente el número de posiciones de precisiónque un mecanismo dado puede satisfacer en la síntesis para generación de trayectoria será mayorque el número de posiciones de precisión en la síntesis para guía de cuerpo rígido o en la síntesispara la generación de funciones.
En el caso específico de la tarea de síntesis para guía de cuerpo rígido mediante un mecanismoplano de cuatro barras —el problema que aborda el presente trabajo de tesis— el númeromáximo de posiciones de precisión es de 5. Sin embargo, puede probarse que para este caso,el número máximo de mecanismos planos de cuatro barras que pueden sintetizarse para estascondiciones es muy pequeño, menor de 12 de manera que es casi imposible optimizar el meca-nismo con tan pocas opciones. Por estas razones, el caso más estudiado de síntesis para guía decuerpo rígido mediante un mecanismo plano de cuatro barras es cuando el número de posicionesde precisión es 4. Es este caso el que aborda el presente trabajo de tesis, el capítulo 2 muestraque el problema no es lineal pero que el conjunto de mecanismos planos de cuatro barras queresuelven este problema tiene dos variables libres y es posible “optimizar” el mecanismo bajodiferentes criterios.
Es importante señalar, en esta sección, que en la síntesis para generación de funciones y enla síntesis para generación de trayectoria es posible realizar la tarea de síntesis con un númeromuy elevado de posiciones de precisión y buscar el mecanismo que aproxime ese número muyelevado de posiciones de precisión de manera que el error entre las posiciones de precisión ylas posiciones realmente generadas por el mecanismo sea mínimo de acuerdo con algún criterioy sin requerir que alguna o algunas de esas posiciones de precisión se satisfagan de maneraexacta. Desafortunadamente, esta alternativa no puede llevarse a cabo en la síntesis para guíade cuerpo rígido pues no existe un criterio para determinar la cercania entre dos posicionesde un cuerpo rígido que sin conocer los límites físicos del cuerpo rígido que se desea guiar seainvariante; es decir, sea independiente del punto del cuerpo rígido seleccionado para llevar acabo el cálculo del error.
1.4. Una breve revisión del estado del arte.Realizar una revisión del estado del arte de un tema que tiene más de 150 años de desarrollo
es una tarea casi imposible de realizar en un proyecto de tesis de Licenciatura, de manera que enesta sección se consideran exclusivamente aquellos trabajos que tienen una relación importantey directa con el contenido de este proyecto.
Burmester, un profesor de ingeniería de la Technischen Hochshule zu München publicó en1888, [2], los fundamentos geométricos para la determinación de los puntos circulares Kreis-punktcurve y puntos centrales Mittelpunktcurve, conocidas en la actualidad como las Curvasde Burmester. La determinación de estas curvas era, hasta la invención de la computadoradigital, una tarea tardada, penosa y demasiado aproximada. No obstante, otros ingenieros ale-manes como Beyer, [1], mostró, en 1953, el empleo de las curvas de Burmester en la síntesisde mecanismos planos de cuatro barras para guía de cuerpo rígido. Beyer también indicó quedesafortunadamente la gran mayoria de los mecanismos sintetizados empleando las curvas deBurmester adolecían de diferentes defectos que hacen el mecanismo poco práctico en algunoscasos o en muchos otros casos completamente inútil.
Hartenberg y Denavit, [6] mostraron de manera detallada el procedimiento geométrico paradeterminar las curvas de Burmester y también reconocieron los problemas asociados con lainutilidad de muchos de los mecanismos sintetizados mediante este proceso. La dificultad paraobtener de manera precisa las curvas de Burmester queda en evidencia con la contribución deKeller, [7], que en 1968 mostró como es posible obtener de manera geométrica y rápida unconjunto de puntos de las curvas de Burmester que permiten esbozar las curvas de Burmester.

4 CAPÍTULO 1. INTRODUCCIÓN
Debe notarse que aún la aparición de la computadora digital no necesariamente condujo auna solución completa de las curvas de Burmester, como muestra Suh y Radcliffe [12, 13], en1978, presentaron una versión incompleta de las curvas de Burmester asociado a un problemade síntesis de guía de cuerpo rígido con cuatro posiciones de precisión, este problema fue com-pletamente resuelto por Orozco, en una tesis de licenciatura [9]. Existen diferentes metodospara encontrar, empleando la computadora digital, las curvas de Burmester. Orozco, en su tesisde licenciatura determinó de manera completa la curva de Burmester, que Suh y Radcliffe sólohabían determinado de manera incompleta, mediante la solución de un sistema no lineal decuatro ecuaciones con cuatro incógnitas mediante el método de Newton-Raphson, el algoritmoinvolucra un ingenioso, para esa época, esquema de seguimiento de la curva de puntos centrales.Waldron obtuvo la curva de puntos centrales mediante la solución de una ecuación cúbica1. Ajuicio del autor de este proyecto y sus asesores, el método más efectivo para determinar las cur-vas de Burmester es debido a los esfuerzos de dos grupos de investigación, el primero dirigidopor Sandor y Erdman [11] y el segundo dirigido por Luck y Modler [8].
1.5. Objetivo de la tesis.
El objetivo del presente trabajo de tesis consiste en el desarrollo de un programa interac-tivo para la síntesis de mecanismos planos de cuatro barras para guía de cuerpos rígidos concuatro puntos de precisión. El programa interactivo debe auxiliar al diseñador para producirun mecanismo que esté libre de los errores de orden, ramal y Grashoff, además el programadebe presentar una simulación del mecanismo sintetizado para verificar que efectivamente elmecanismo está libre de los errores indicados.
1.6. Descripción de la tesis.
En este capítulo se presenta una descripción de las diferentes tareas de síntesis, al estadodel arte. Además, se describe una breve introducción al estado del arte en la síntesis rectificadade mecanismos planos de cuatro barras para guía de cuerpos rígidos con cuatro puntos deprecisión. Finalmente, se enuncia el objetivo del presente trabajo de tesis.
El capítulo 2 constituye la parte medular del trabajo de tesis y presenta los fundamentosde la síntesis de mecanismos planos de cuatro barras para guía de cuerpo rígido para dos,tres y cuatro posiciones de precisión. Además el capítulo presenta las herramientas para ladeterminación de los polos de rotación entre las posiciones de precisión indicadas. Estos polosde rotación juegan un papel importante en la síntesis de mecanismos planos de cuatro barraspara guía de cuerpo rígido para cuatro posiciones de precisión. La sección 2.3.1 presenta la teoríadetrás de la determinación de las curvas de Burmester empleando el método desarrollado demanera independiente por Sandor, [11], y Luck, [8], este método emplea una ecuación genéricade clausura, números complejos y eventualmente se reduce a la solución del análisis de posiciónde un mecanismo equivalente de cuatro barras. La sección 2.3.2 presenta algunas propiedadesimportantes acerca de las curvas de Burmester. La sección 2.4 presenta una manera muy sencillade determinar si las curvas de Burmester tienen uno o dos ramales y dos ejemplos de aplicacióndel método. Finalmente, la sección 2.5 presenta información adicional —generada durante laobtención de las curvas de Burmester— acerca de los ángulos de rotación del eslabón generadoseleccionando una pareja arbitraria de un punto circular y un punto central. Esta informaciónes de mucho valor para rectificar los errores de orden y de ramal del mecanismo sintetizado.
1Puede mostrarse que ambas curvas de Burmester son cúbicas; este resultado significa que la intersección decualquiera de esas curvas con una recta cualquiera puede tener una o tres intersecciones.

1.6. DESCRIPCIÓN DE LA TESIS. 5
El capítulo 3 presenta las técnicas necesarias para evitar o “rectificar” los errores de orden,ramal y Grashoff, estas técnicas están basadas en la información acerca de los puntos circularesy centrales obtenida en la sección 2.5. Es importante señalar que para determinados conjuntosde posiciones de precisión puede ser imposible sintetizar un mecanismo plano de cuatro barraspara guía de cuerpos rígidos con cuatro puntos de precisión libre de los errores de orden, ramaly Grashoff.
El capítulo 4, presenta las características del programa interactivo, realizado en el softwareMatLab c⃝, incluyento la interfaz gráfica, la operación de los diferentes íconos del programa, laoperación del programa para obtener, y si es necesario refinar, las curvas de Burmester y comoevitar los errores de orden, ramal y Grasfoff.
El capítulo 5 muestra varios ejemplos de aplicación del programa interactivo, dos de ellosconducen a mecanismos libres de los defectos de orden, ramal y Grashoff, los tres ejemplosrestantes muestras mecanismos sintetizados que adolecen de cada uno de los errores antesmencionados.
Finalmente, el capítulo 6 presenta las conclusiones del trabajo y sugiere algunas de lasmuchas posibilidades de mejoramiento del trabajo y del programa interactivo.
El Apéndice A presenta los cálculos necesarios para la determinación del punto de Ball.El Apéndice B ilustra como ejecutar el programa de síntesis a partir del programa Matlab c⃝.El Apéndice C presenta un diagrama de flujo del programa principal y subprogramas. Estainformación se proveé para facilitar la mejora o modificación del programa de síntesis.

6 CAPÍTULO 1. INTRODUCCIÓN
Capítulo 2
Determinación de las curvas de Burmester
En este capítulo se presenta un método para la determinación de las curvas de Burmester,como se indicó en la sección 1.3, las curvas de Burmester permiten resolver la síntesis de meca-nismos planos de cuatro barras para guía de cuerpos rígidos con cuatro posiciones de precisión.El método presentado en este capítulo permite, además, obtener información adicional acercade los puntos de las curvas de Burmester. Dicha información permite resolver los diferenteserrores que frecuentemente aparecen durante la síntesis de mecanismos planos de cuatro barraspara guía de cuerpos rígidos con cuatro posiciones de precisión.
2.1. Síntesis de mecanismos planos de cuatro barras parados y tres posiciones de precisión.
En esta sección se presenta la síntesis de mecanismos planos para guía de cuerpos rígidos condos y tres posiciones de precisión empleando una representación matricial de los desplazamientoseuclidianos. Este método, en realidad, comprende toda una familia de métodos en los cualeslos desplazamientos de cuerpo rígido, también llamados mapeos euclidianos, se representanmediante algún elemento de una estructura algebraica isomórfica. Debe igualmente recordarseque como punto de partida de la tarea de síntesis de mecanismos planos de cuatro barras paraguía de cuerpos rígidos se conocen precisamente las posiciones de precisión; es decir, para cadauna de las posiciones de precisión j se conoce el vector de posición r⃗Pj de un punto P delcuerpo rígido que se pretende guiar y el ángulo αj que el cuerpo rígido gira desde la posición deprecisión inicial; como resultado de esta selección, es evidente que, sin pérdida de generalidad,puede seleccionarse α1 = 0◦.
Aquí se mostrará el método de síntesis de mecanismos planos para guía de cuerpos rígidoscon dos y tres posiciones de precisión tal como se indica en las referencias originales de Suh yRadcliffe [12, 13]. En este método, la posición de un punto de un cuerpo rígido se representacomo un vector bidimensional, después de haber seleccionado arbitrariamente un sistema dereferencia. Un mapeo euclidiano se representa como la composición, de una traslación y unarotación alrededor del origen del sistema de referencia, que constituye un caso especial de lastransformaciones afines, vea la figura 2.1.
La acción del mapeo euclidiano sobre los puntos del plano, está dada por
r⃗ ′ = Rr⃗ + t⃗, (2.1)
o en forma matricial, por [x′
y′
]=
[cos θ − sin θsin θ cos θ
] [xy
]+
[txty
], (2.2)
7

8 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
Figura 2.1: Definición del mapeo euclidiano.
donde t⃗ = (tx, ty)T es el vector que representa el desplazamiento del origen y θ es el ángulo de
rotación del cuerpo, R es la matriz de rotación dada por
R =
[cos θ − sin θsin θ cos θ
]y r⃗ = (x, y)T y r⃗ ′ = (x′, y′)T son los vectores de posición de los puntos denotados homólogosantes, P , y después del deplazamiento euclidiano, P ′, respectivamente.
2.1.1. Síntesis con dos posiciones de precisión.
Para sintetizar un mecanismo plano de cuatro barras para guía de cuerpo rígido, es necesarioencontrar puntos del cuerpo rígido, uno de ellos denotado por A, cuya posición genérica estárepresentada por el vector a⃗, y que en las posiciones 1 y 2 del cuerpo rígido, la posición delpunto A está representada respectivamente por a⃗1 y a⃗2. El punto buscado A debe encontrarsea la misma distancia de un punto fijo, denotado por A0, y representado por a⃗0.
La condición de síntesis para dos posiciones de precisión está dada por
|⃗a1 − a⃗0| = |⃗a2 − a⃗0| (2.3)
Suponga que a⃗1 = (a1x, a1y) y a⃗0 = (a0x, a0y) son las coordenadas del punto A en la posición1 del cuerpo rígido y del punto fijo A0, respectivamente. Entonces, si el desplazamiento delcuerpo rígido que desplaza el cuerpo rígido de la posición 1 a la posición 2 está dado por laecuación (2.2), las coordenadas del punto homólogo, a⃗2, del punto A en la posición 2 del cuerporígido están dadas por[
a2xa2y
]=
[cos θ12 − sin θ12sin θ12 cos θ12
] [a1xa1y
]+
[t12xt12y
](2.4)
donde θ12 es el ángulo de rotación del cuerpo y t⃗12 = (t12x, t12y)T es el desplazamiento del origen
del sistema coordenado asociado al desplazamiento euclidiano.Desarrollando la ecuación (2.4) se tiene que
a2x = a1x cos θ12 − a1y sin θ12 + t12x
a2y = a1x sin θ12 + a1y cos θ12 + t12y (2.5)

2.1. SÍNTESIS DE MECANISMOS PARA DOS Y TRES POSICIONES DE PRECISIÓN. 9
y la ecuación de síntesis está dada por
(a1x − a0x)2 + (a1y − a0y)
2 = (a1x cos θ12 − a1y sin θ12 + t12x − a0x)2 +
(a1x sin θ12 − a1y cos θ12 + t12y − a0y)2 (2.6)
o, expandiendo los términos cuadráticos,
2a1x(t12x cos θ12 − a0x cos θ12 + t12y sin θ12 − a0y sin θ12 + a0x) +
2a1y(−t12x sin θ12 + t12y cos θ12 + a0y cos θ12 + a0x sin θ12 + a0y) +
t212x + t212y − 2t12xa0x − 2t12ya0y = 0 . (2.7)
La ecuación (2.7) puede arreglarse de dos diferentes maneras, la primera manera está dada
2a1x(t12x cos θ12 − a0x cos θ12 + t12y sin θ12 − a0y sin θ12 + a0x) +
2a1y(−t12x sin θ12 + t12y cos θ12 + a0y cos θ12 + a0x sin θ12 + a0y) +
t212x + t212y − 2t12xa0x − 2t12ya0y = 0
o eliminando los coeficientes de a1x y a1y
a1x(t12x cos θ12 − a0x cos θ12 + t12y sin θ12 − a0y sin θ12 + a0x) +
a1y(−t12x sin θ12 + t12y cos θ12 − a0y cos θ12 + a0x sin θ12 + a0y) +
1
2(t212x + t212y)− t12xa0x − t12ya0y = 0 (2.8)
Otra manera de arreglar la ecuación (2.7) está dada por
2a0x(a1x − a1x cos θ12 + a1y sin θ12 − t12x) +
2a0y(a1y − a1x sin θ12 − a1y cos θ12 − t12y) +
(t212x + t212y) +
2(a1xt12x cos θ12 − a1yt12x sin θ12 + a1xt12y sin θ12 + a1yt12y cos θ12) = 0
o eliminando los coeficientes de a0x y a0y
a0x(a1x − a1x cos θ12 + a1y sin θ12 − t12x) +
a0y(a1y − a1x sin θ12 − a1y cos θ12 − t12y) +
1
2(t212x + t212y) +
(a1xt12x cos θ12 − a1yt12x sin θ12 + a1xt12y sin θ12 + a1yt12y cos θ12) = 0 (2.9)
La primera forma, ecuación (2.8), puede interpretarse como una ecuación lineal en las coor-denadas del punto homólogo A en la posición 1, a⃗1 = (a1x, a1y), una vez que se ha seleccionadoarbitrariamente las coordenadas del punto A0 dadas por a⃗0 = (a0x, a0y). El proceso involucra 3selecciones libres —o alternativamente 3 grados de libertad. Puesto que el diseño del mecanismorequiere de repetir dos veces el proceso, una para sintetizar el eslabón conductor y otra parasintetizar el eslabón conducido. Por lo tanto, el problema de síntesis de mecanismos planos decuatro barras para guía de cuerpo rígido con dos posiciones de precisión tiene 6 variables libres—o alternativamente 6 grados de libertad. Hartenberg y Denavit indican que el problema tiene(∞3)(∞3) = ∞6 mecanismos solución1.
1Esta es una manera matemáticamente incorrecta pero que fue usada, en la literatura de mecanismos de losaños cincuenta del siglo pasado, para indicar que, en este caso, la solución del problema permite la selección de6 variables libres. Sin importar que el problema sea o no lineal.

10 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
La segunda forma, ecuación (2.9), puede interpretarse como una ecuación lineal en lascoordenadas del punto A0, a⃗0 = (a0x, a0y) una vez que se ha seleccionado arbitrariamente lascoordenadas del punto homólogo A en la posición 1 a⃗1 = (a1x, a1y). Usando esta segunda forma,el problema de síntesis de mecanismos planos de cuatro barras para guía de cuerpo rígido condos posiciones de precisión tiene también 6 selecciones libres —o alternativamente 6 grados delibertad.
2.1.2. Determinación del desplazamiento del origen.
Una pequeña modificación a las ecuaciones anteriores permite obtener el vector t⃗12 querepresenta el desplazamiento del origen, en términos de la posición inicial y final de un puntoarbitrario. Sean r⃗ = (x, y) y r⃗′ = (x′, y′) los vectores de posición del punto P , un punto arbitrarioen sus posiciones iniciales y finales, entonces es posible escribir, a partir de la ecuación (2.1)
t⃗12 = r⃗′ −Rθ12 r⃗ (2.10)
o en forma matricial [t12xt12y
]=
[x′
y′
]−
[cos θ12 − sin θ12sin θ12 cos θ12
] [xy
](2.11)
las componentes escalares de esta ecuación están dadas por
t12x = x′ − x cos θ12 + y sin θ12
t12y = y′ − x sin θ12− y cos θ12
De manera que para la síntesis con dos posiciones de precisión conviene re-escribir lasecuaciones de la siguiente manera más general:
a1x(t1jx cos θ1j + t1jy sin θ1j − a0x cos θ1j − a0y sin θ1j + a0x) +
a1y(t1jy cos θ1j − t1jx sin θ1j + a0x sin θ1j − a0y cos θ1j + a0y) +
1
2(t21jx + t21jy)− a0xt1jx − a0yt1jy = 0 (2.12)
o
a0x(a1x − a1x cos θ1j + a1y sin θ1j − t1jx)
+a0y(a1y − a1x sin θ1j − a1y cos θ1j − t1jy)
+1
2(t21jx+
21jy)+
(a1xt1jx cos θ1j − a1xt1jx sin θ1j − a1yt1jx sin θ1j + a1yt1jy cos θ1j) = 0 (2.13)
donde
tijx = xj − x1 cos θ1j + y1 sin θ1j
tijy = yj − x1 sin θ1j − y1 cos θ1j (2.14)
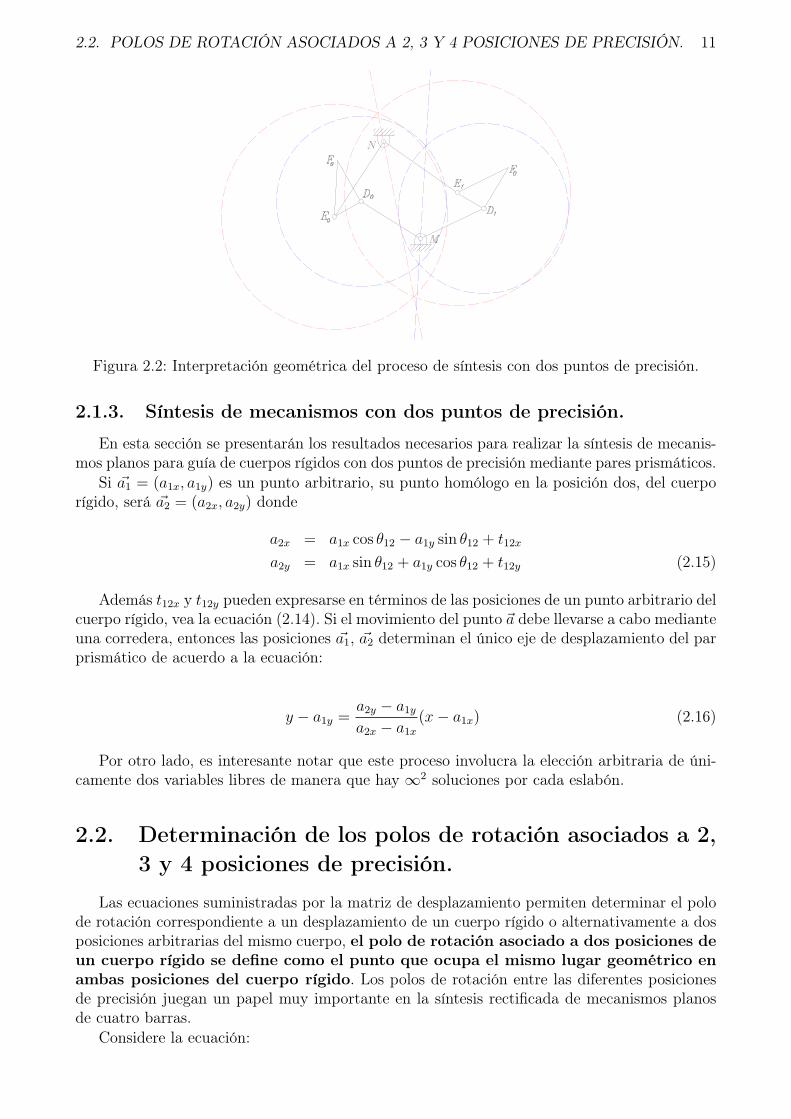
donde j=2.La figura 2.2 muestra una interpretación geométrica del proceso de síntesis con dos puntos
de precisión.
2.2. POLOS DE ROTACIÓN ASOCIADOS A 2, 3 Y 4 POSICIONES DE PRECISIÓN. 11
Figura 2.2: Interpretación geométrica del proceso de síntesis con dos puntos de precisión.
2.1.3. Síntesis de mecanismos con dos puntos de precisión.
En esta sección se presentarán los resultados necesarios para realizar la síntesis de mecanis-mos planos para guía de cuerpos rígidos con dos puntos de precisión mediante pares prismáticos.
Si a⃗1 = (a1x, a1y) es un punto arbitrario, su punto homólogo en la posición dos, del cuerporígido, será a⃗2 = (a2x, a2y) donde
a2x = a1x cos θ12 − a1y sin θ12 + t12x
a2y = a1x sin θ12 + a1y cos θ12 + t12y (2.15)
Además t12x y t12y pueden expresarse en términos de las posiciones de un punto arbitrario delcuerpo rígido, vea la ecuación (2.14). Si el movimiento del punto a⃗ debe llevarse a cabo medianteuna corredera, entonces las posiciones a⃗1, a⃗2 determinan el único eje de desplazamiento del parprismático de acuerdo a la ecuación:
y − a1y =a2y − a1ya2x − a1x
(x− a1x) (2.16)
Por otro lado, es interesante notar que este proceso involucra la elección arbitraria de úni-camente dos variables libres de manera que hay ∞2 soluciones por cada eslabón.
2.2. Determinación de los polos de rotación asociados a 2,3 y 4 posiciones de precisión.
Las ecuaciones suministradas por la matriz de desplazamiento permiten determinar el polode rotación correspondiente a un desplazamiento de un cuerpo rígido o alternativamente a dosposiciones arbitrarias del mismo cuerpo, el polo de rotación asociado a dos posiciones deun cuerpo rígido se define como el punto que ocupa el mismo lugar geométrico enambas posiciones del cuerpo rígido. Los polos de rotación entre las diferentes posicionesde precisión juegan un papel muy importante en la síntesis rectificada de mecanismos planosde cuatro barras.
Considere la ecuación:

12 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
[x′
y′
]=
[cos θ12 − sin θ12sin θ12 cos θ12
] [xy
]+
[t12xt12y
]donde r⃗ = (x, y) y r⃗′ = (x′, y′) son los vectores de posición de las posiciones iniciales y finalesde un punto. Por lo tanto r⃗ = (x, y) será el polo de rotación si y sólo si r⃗ = (x, y) = r⃗′ = (x′, y′).La condición conduce a la siguiente ecuación:
[xy
]−
[cos θ12 − sin θ12sin θ12 cos θ12
] [xy
]=
[t12xt12y
]De aquí que [
1− cos θ12 sin θ12− sin θ12 1− cos θ12
] [xy
]=
[t12xt12y
](2.17)
Por lo tanto, el determinante de la matriz de coeficientes es:
∆ = (1− cos θ12)2 + sin θ212 = 1− 2 cos θ12 + cos θ212 + sin θ212
∆ = 2(1− cos θ12) (2.18)
El sistema tiene solución única si, y sólo si, cos θ12 ̸= 1. Es decir, si y soló si θ12 ̸= 0. Este esun resultado esperado, pues si θ12 = 0 el desplazamiento es una traslación y el polo queda enel infinito en una dirección perpendicular al vector t⃗ = (t12x, t12y). Suponga ahora que θ12 ̸= 0,entonces
x =
[t12x sin θ12t12y 1− cos θ12
]∆
=t12x(1− cos θ12)− t12y sin θ12
2(1− cos θ12)(2.19)
y =
[1− cos θ12 t12x− sin θ12 t12y
]∆
=t12x sin θ12 + t12y(1− cos θ12)
2(1− cos θ12)(2.20)
Las ecuaciones (2.19) y (2.20) determinan la posición del polo de rotación asociado a dosposiciones de un cuerpo rígido y denotado P12. La figura 2.3 proporciona una interpretacióngeométrica de la determinación del polo de rotación.
Es importante señalar que para cada pareja de posiciones de precisión existe un polo derotación correspondiente, que puede estar en el infinito. Por lo tanto:
1. Para el problema de síntesis con dos posiciones de precisión existe un único polo derotación, P12.
2. Para el problema de síntesis con tres posiciones de precisión existen tres polos de rotación,P12, P13 y P23.
3. Para el problema de síntesis con cuatro posiciones de precisión existen seis polos derotación, P12, P13, P14, P23, P24 y P34.
más aún, los polos de rotación asociados a la posición 1,2 se denominan absolutos, mientrasque los polos de rotación que no están asociados a la posición 1 se denominan relativos.Cualquier polo de rotación relativo Pij donde i ̸= 1 y j ̸= 1, tienen un polo imagen en laposición 1. Este polo imagen es el punto homólogo a Pij en la posición 1 y se denomina P 1
ij. Deesta manera:
2Es decir que una de las dos posiciones es la posición 1.

2.2. POLOS DE ROTACIÓN ASOCIADOS A 2, 3 Y 4 POSICIONES DE PRECISIÓN. 13
Figura 2.3: Interpretación geométrica del proceso de localización del polo de rotación.
1. Para el problema de síntesis con tres posiciones de precisión existe un polo imagen dadopor P 1
23.
2. Para el problema de síntesis con cuatro posiciones de precisión existen tres polos imagendados por P 1
23, P124 y P 1
34.
La figura 2.4 muestra los polos de rotación asociados a tres posiciones de precisión. En lafigura aparecen los polos de rotación: P12, P13 y P23, los dos primeros son polos de rotatciónabsolutos, mientras que el polo de rotación P23 es un polo de rotatción relativa. Además lafigura muestra los polos imágenes P 1
23 y P 312. El primero es el punto asociado al cuerpo rígido
en la posición 1 que es homólogo al polo de rotación P23 y el segundo es el punto asociado alcuerpo rígido en la posición 3 que es homólogo al polo de rotación P12.
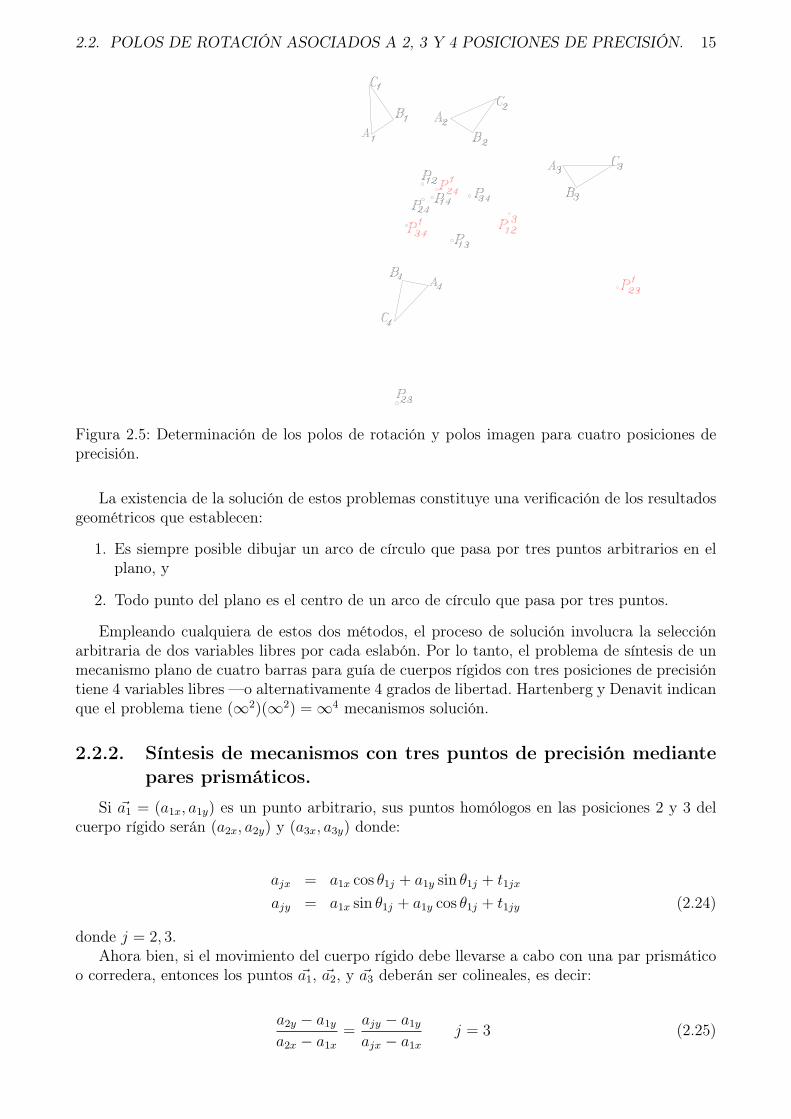
Finalmente, La figura 2.5 muestra los polos de rotación asociados a cuatro posiciones deprecisión. En la figura aparecen los polos de rotación: P12, P13, P14, P23, P24 y P34, los tresprimeros son polos de rotación absolutos, mientras que los polos de rotación P23, P24 y P34, sonpolos de rotatción relativa. Además la figura muestra los polos imágenes P 1
23 y P 312. El primero
es el punto asociado al cuerpo rígido en la posición 1 que es homólogo al polo de rotación P23
y el segundo es el punto asociado al cuerpo rígido en la posición 3 que es homólogo al polo derotación P12.
2.2.1. Síntesis con tres posiciones de precisión.
Para la síntesis de mecanismos de cuatro barras para guía del cuerpo rígido con tres puntosprecisión, las ecuaciones pueden escribirse en dos formas equivalentes.
a1x(t1jx cos θ1j + t1jy sin θ1j − a0x cos θ1j − a0y sin θ1j + a0x)+
a1y(t1jy cos θ1j − t1jx sin θ1j + a0x sin θ1j + a0y cos θ1j + a0y)+
1
2(t21jx + t21jy)− a0xt1jx − a0yt1jy = 0 j = 2, 3 (2.21)

14 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
Figura 2.4: Determinación de los polos de rotación y polos imagen para tres posiciones deprecisión.
o
a0x(a1x − a1x cos θ1j + a1y sin θ1j − t1jx)+
a0y(a1y − a1x sin θ1j − a1y cos θ1j − t1jy)+
1
2(t21jx+
21jy)+
(a1xt1jx cos θ1j − a1xt1jx sin θ1j − a1yt1jx sin θ1j + a1yt1jy cos θ1j) = 0 j = 2, 3 (2.22)
donde
tijx = xj − x1 cos θ1j + y1 sin θ1j
tijy = yj − x1 sin θ1j − y1 cos θ1j (2.23)
Geométricamente, el problema se reduce a la localización de un punto a⃗1 = (a1x, a1y) queen las tres posiciones de un cuerpo rígido se encuentre en un arco de círculo cuyo centro esa⃗0 = (a0x, a0y). Los puntos como a⃗1 se denominan Puntos Circulares, de manera semejante,puntos como a⃗0 se denominan Puntos Centrales3.
El problema todavía puede resolverse de forma lineal mediante una juiciosa selección de lasvariables libres. Por ejemplo, en el primer conjunto de ecuaciones, vea la ecuación (2.21), sedeben seleccionar arbitrariamente las coordenadas del centro del círculo, o del punto central,a⃗0 = (a0x, a0y) y se determinan las coordenadas del punto circular —que en las tres posicionesde precisión se encuentra en el arco de círculo— en la posición 1; es decir a⃗1 = (a1x, a1y). Enel segundo conjunto de ecuaciones, vea la ecuación (2.22), se seleccionan arbitrariamente lascoordenadas del punto circular, en la posición 1; es decir, a⃗1 = (a1x, a1y) y se resuelve el sistemade ecuaciones para las coordenadas del punto central; es decir, del centro del arco de círculo,a⃗0 = (a0x, a0y).
3Sin embargo algunos autores reservan estas denominaciones para el problema de cuatro puntos de precisión.
2.2. POLOS DE ROTACIÓN ASOCIADOS A 2, 3 Y 4 POSICIONES DE PRECISIÓN. 15
Figura 2.5: Determinación de los polos de rotación y polos imagen para cuatro posiciones deprecisión.
La existencia de la solución de estos problemas constituye una verificación de los resultadosgeométricos que establecen:
1. Es siempre posible dibujar un arco de círculo que pasa por tres puntos arbitrarios en elplano, y
2. Todo punto del plano es el centro de un arco de círculo que pasa por tres puntos.
Empleando cualquiera de estos dos métodos, el proceso de solución involucra la selecciónarbitraria de dos variables libres por cada eslabón. Por lo tanto, el problema de síntesis de unmecanismo plano de cuatro barras para guía de cuerpos rígidos con tres posiciones de precisióntiene 4 variables libres —o alternativamente 4 grados de libertad. Hartenberg y Denavit indicanque el problema tiene (∞2)(∞2) = ∞4 mecanismos solución.
2.2.2. Síntesis de mecanismos con tres puntos de precisión mediantepares prismáticos.
Si a⃗1 = (a1x, a1y) es un punto arbitrario, sus puntos homólogos en las posiciones 2 y 3 delcuerpo rígido serán (a2x, a2y) y (a3x, a3y) donde:
ajx = a1x cos θ1j + a1y sin θ1j + t1jx
ajy = a1x sin θ1j + a1y cos θ1j + t1jy (2.24)
donde j = 2, 3.Ahora bien, si el movimiento del cuerpo rígido debe llevarse a cabo con una par prismático
o corredera, entonces los puntos a⃗1, a⃗2, y a⃗3 deberán ser colineales, es decir:
a2y − a1ya2x − a1x
=ajy − a1yajx − a1x
j = 3 (2.25)

16 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
Sustituyendo las expresiones de a2x, a2y, a3y se tiene que:
(a1x sin θ12 + a1y cos θ12 + t12y)− a1y(a1y cos θ12 − a1y sin θ12 + t12x)− a1x
=(a1x sin θ13 + a1y cos θ13 + t13y)− a1y(a1x cos θ13 − a1y sin θ13 + t13x)− a1x
ó4
[(a1xS12 + a1yC12 + t12y)− a1y] [(a1xC13 − a1yS13 + t13x)− a1x] =
[(a1xS13 + a1yC13 + t13y)− a1y] [(a1xC12 − a1yS12 + t12x)− a1x]
Expandiendo los productos, se tiene que
a21xS12C13 − a1xa1yS12S13 + a1xS12t13x − a21xS12 + a1xa1yC12C13
−a21yC12S13 + a1yC12t13x − a1xa1yC12 + a1xt12yC13 − a1yt12yS13
+t12yt13x − a1xt12y − a1xa1yC13 + a21yS13 − a1yt13x + a1ya1x =
a21xS13C12 − a1xa1yS12S13 + a1xS13t12x − a21xS13 + a1xa1yC12C13
−a21yS12C13 + a1yt12xC13 − a1xa1yC13 + a1xt13yC12 − a1yt13yS12
+t12xt13y − a1xt13y − a1xa1yC12 + a21yS12 − a1yt12x + a1ya1x
ó
a21x(S12C13 − S12 − S13C12 + S13) + a21y(−C12S13 + S13 + S12C13 − S12)
+a1x(S12t13x + t12yC13 − t12y − S13t12x − t13yC12 + t13y)
+a1y(C12t13x + t12yS13 − t13x − C13t12x − t13yS12 + t12x)
+(t12yt13x − t12xt13y) = 0
ó
a21x [−S12(1− C13) + (1− C12)S13]
+a21y [−S12(1− C13) + (1− C12)S13]
+a1x [−t12y(1− C13) + t13y(1− C12) + S12t13x − S13t12x]
+a1y [−t13x(1− C12) + t12x(1− C13) + S12t13y − S13t12y]
+(t12yt13x − t12xt13y) = 0 (2.26)
Esta es una ecuación cuadrática para la cual los coeficientes de los términos cuadráticosson iguales, de manera que representa un círculo conocido como círculo de correderas. Laecuación del círculo de correderas puede escribirse como
Aa21x + Aa21y +Ba1x + Ca1y +D = 0 (2.27)
donde
A = S13(1− C12)− S12(1− C13)
B = t13y(1− C12)− t12y(1− C13) + (S12t13x − S13t12x)
C = t12x(1− C13)− t13x(1− C12) + (S12t13y − S13t12y)
D = t12yt13x − t12xt13y (2.28)
4A fin de hacer más compactas las expresiones, se usarán las abreviaciones S por Seno y C por Coseno.

2.2. POLOS DE ROTACIÓN ASOCIADOS A 2, 3 Y 4 POSICIONES DE PRECISIÓN. 17
La forma final de la ecuación del círculo de correderas está dada por
(a1x − Cx)2 + (a1y − Cy)
2 = r2
donde
−2a1xACx = Ba1x por lo que Cx = −B
2A
−2a1yACy = Ca1y por lo que Cy = −C
2A (2.29)
y
r2 = −D +
(− B
2A
)2
+
(− C
2A
)2
= −D +B2 + C2
4A2=
B2 − 4A2D + C2
4A2(2.30)
Un simple argumento sintético asegura la existencia de soluciones mediante pares prismáti-cos o correderas para la síntesis de guía de cuerpo rígido con tres puntos de precisión. Note queen general, los polos P12, P13 o P 1
23 constituyen puntos que conducen a soluciones del problema,la razón es muy sencilla. Los polos representan puntos que para dos posiciones del cuerpo rígidopermanece en la misma posición. Por ejemplo, P12 permanece fijo en las posiciones 1 y 2, P13
permanece fijo en las posiciones 1 y 3 y P 123 permanece fijo en las posiciones 2 y 3. De manera
que se obtienen soluciones muy sencillas del problema de síntesis de mecanismos para guía decuerpo rígido mediante pares prismáticos que deben colocarse a lo largo de las líneas definidaspor:
P12 − P 312, o P13 − P 2
13, o P 123 − P23
Como tres puntos cualesquiera definen un círculo, la figura 2.6 muestra el círculo de correderasasociado a las tres posiciones de precisión mostrados en la figura 2.4.
Figura 2.6: Círculo de correderas para la síntesis de mecanismos para guía de cuerpo rígido contres puntos de precisión mediante pares prismáticos

18 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
2.3. Síntesis con cuatro puntos de precisión.
En esta sección se presenta la síntesis de mecanismos planos de cuatro barras para guía decuerpo rígido con cuatro puntos de precisión. Con referencia a la sección 2.2.1, las ecuacionesde síntesis para guía de cuerpo rígido con 4 posiciones de precisión están dadas por
a1x(t1jx cos θ1j + t1jy sin θ1j − a0x cos θ1j − a0y sin θ1j + a0x)+
a1y(t1jy cos θ1j − t1jx sin θ1j + a0x sin θ1j + a0y cos θ1j + a0y)+
1
2(t21jx + t21jy)− a0xt1jx − a0yt1jy = 0 j = 2, 3, 4 (2.31)
o
a0x(a1x − a1x cos θ1j + a1y sin θ1j − t1jx)+
a0y(a1y − a1x sin θ1j − a1y cos θ1j − t1jy)+
1
2(t21jx+
21jy)+
(a1xt1jx cos θ1j − a1xt1jx sin θ1j − a1yt1jx sin θ1j + a1yt1jy cos θ1j) = 0 j = 2, 3, 4 (2.32)
donde
tijx = xj − x1 cos θ1j + y1 sin θ1j j = 2, 3, 4
tijy = yj − x1 sin θ1j − y1 cos θ1j j = 2, 3, 4 (2.33)
Sin importar cual de las ecuaciones (2.31) o (2.32) se emplee, existe una variable libre. Porejemplo, es posible seleccionar el punto circular a⃗1 = (a1x, a1y) y una de los coordenadas delpunto central a⃗0 = (a0x, a0y) y resolver para la restante coordenada. Desafortunadamente esteproblema no es lineal.
Existen muchos métodos para resolver este problema, la aplicación del método de Newton-Raphson, la manipulación algebraica de las ecuaciones (2.31) o (2.32) para obtener una únicaecuación en una variable —esta ecuación resulta ser una ecuación cúbica—, etc. La sección 2.3.1muestra un método de solución de estas ecuaciones que es equivalente a resolver el análisis deposición de un mecanismo plano de cuatro barras.
2.3.1. Determinación de las curvas de Burmester.
En esta sección se presenta el método presentado por Erdman y Sandor [11] para la deter-minación de las curvas de Burmester. Los orígenes de este método se remontan a la disertacióndoctoral de Sandor y las investigaciones de Luck [8]. El método de solución hace uso intensivode la representación de vectores en el plano mediante números complejos, se asumirá que ellector está familiarizado con esa representación.
La figura 2.7 muestra dos posiciones 1 y j de un cuerpo rígido. Las posiciones del cuerporígido quedan determinadas por las posiciones de los puntos homólogos P1 y Pj y los ángulosα1, que siempre se supone igual a 0◦, y αj que respectivamente forman con el eje X una líneaP1R1, PjRj, embebida en el cuerpo rígido. Suponga que K es el punto circular, tal que K1 y Kj
son las posiciones correspondientes del punto circular en las posiciones 1 y j, y M es el puntocentral correspondiente.5
5Creo que este análisis puede extenderse para mostrar que si la curva de los puntos circulares tiene dosramales existen 3 polos en cada ramal.

2.3. SÍNTESIS CON CUATRO PUNTOS DE PRECISIÓN. 19
Figura 2.7: Problema de síntesis cinemática de un mecanismo plano de cuatro barras para guíade cuerpo rígido con dos posiciones de precisión.
El origen del sistema coordenado O junto con los puntos K1, M , Kj forman un circuitocerrado. La ecuación de clausura del lazo está dada por
W + Z + δj = Wj + Zj o W + Z + δj = Weiβj + Zeiαj (2.34)
donde W es el número complejo que representa al vector que va del punto M al punto K1,Z es el número complejo que representa al vector que va del punto K1 al punto P1, ademásδj es el número complejo que representa al vector que va del punto P1, el punto asociado a laprimera posición de precisión, al punto Pj, el punto asociado a la j-ésima posición de precisión.El número complejo δj puede calcularse como
δj = r⃗Pj − r⃗P1.
Puesto que r⃗Pj para j = 1, 2, 3, 4 es un dato del problema de síntesis de mecanismos para guíade cuerpo rígido, entonces los números complejos δj son igualmente conocidos.
Además, debe notarse que la multiplicación de un número complejo por un número complejounitario ei θ es equivalente a rotar al vector representado por el número complejo un ángulo θ.Por lo tanto,
Wj = Weiβj y Zj = Zeiαj
La ecuación (2.34) puede rearreglarse como
Weiβj + Zeiαj − δj − Z −W = 0
Por lo tanto, en su forma final, la ecuación (2.34) puede escribirse como
W (−1 + eiβj) + Z(−1 + eiαj) = δj j = 2, 3, 4 (2.35)
Esta ecuación (2.35) puede interpretarse como un sistema lineal no homogéneo de ecuacionescomplejas −1 + eiβ2 −1 + eiα2
−1 + eiβ3 −1 + eiα3
−1 + eiβ4 −1 + eiα4
[WZ
]=
δ2δ3δ4
(2.36)

20 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
El sistema tendrá solución si, y sólo si, el vector de términos independientes yace en el espaciogenerado por las columnas de la matriz de coeficientes. Es decir, si la matriz aumentada tienerango 2, por lo tanto, la “ecuación de compatibilidad” del sistema de ecuaciones es
0 =
∣∣∣∣∣∣eiβ2 − 1 eiα2 − 1 δ2eiβ3 − 1 eiα3 − 1 δ3eiβ4 − 1 eiα4 − 1 δ4
∣∣∣∣∣∣ (2.37)
= (eiβ2 − 1)
∣∣∣∣ eiα3 − 1 δ3eiα4 − 1 δ4
∣∣∣∣− (eiβ3 − 1)
∣∣∣∣ eiα2 − 1 δ2eiα4 − 1 δ4
∣∣∣∣+ (eiβ4 − 1)
∣∣∣∣ eiα2 − 1 δ2eiα3 − 1 δ3
∣∣∣∣
Figura 2.8: Mecanismo equivalente cuyos eslabones tienen como longitud la norma de los nú-meros complejos dados por ∆1, ∆2, ∆3, ∆4.
Denominando
∆2 =
∣∣∣∣ eiα3 − 1 δ3eiα4 − 1 δ4
∣∣∣∣ , ∆3 = −∣∣∣∣ eiα2 − 1 δ2eiα4 − 1 δ4
∣∣∣∣ , ∆4 =
∣∣∣∣ eiα2 − 1 δ2eiα3 − 1 δ3
∣∣∣∣La ecuación de compatibilidad, vea la ecuación (2.38), puede escribirse como
∆2(eiβ2 − 1) + ∆3(e
iβ3 − 1) + ∆4(eiβ4 − 1) = 0
o∆2e
iβ2 +∆3eiβ3 +∆4e
iβ4 +∆1 = 0
donde∆1 = −∆2 −∆3 −∆4 = − (∆2 +∆3 +∆4)
Esta ecuación puede interpretarse como la ecuación de clausura de un mecanismo equivalentecuyas longitudes son ∆1, ∆2, ∆3, ∆4, vea la figura 2.8. Debe notarse que en su posición inicial;es decir, cuando6
β2 = β3 = β4 = 0◦,
6Los ángulos β2, β3 y β4 no pueden observarse porque son los que corresponden a la posición inicial delmecanismo equivalente.

2.3. SÍNTESIS CON CUATRO PUNTOS DE PRECISIÓN. 21
el mecanismo equivalente cumple la clausura pues
∆2ei 0 +∆3e
i 0 +∆4ei 0 +∆1 = ∆2 +∆3 +∆4 − (∆2 +∆3 +∆4) = 0.
A partir de esa posición inicial, variando el ángulo de rotación del eslabón motriz β2, elanálisis de posición del mecanismo equivalente permite determinar los ángulos de rotación delos eslabones acoplador, β3, y seguidor o conducido, β4. El ángulo βj tiene una interpretacióngeométrica muy sencilla, βj representa el ángulo que el eslabón formado por el punto central My el punto circular K debe rotar para pasar de la posición de precisión inicial, 1, a la j-ésimaposición de precisión. La sección 3.2 mostrará que los ángulos β2, β3, β4, junto con el ánguloβ1 = 0◦ correspondiente a la posición inicial, permiten resolver el problema de orden.
Una vez conocidos los valores de β2, β3, β4 que satisfacen la ecuación de compatibilidad,(2.38), los valores de las variables complejas W y Z pueden determinarse empleando cuales-quiera 2 de las 3 ecuaciones complejas lineales representadas por la ecuación (2.36). más aún,la determinación de las las variables complejas W y Z permiten determinar la localización delos puntos centrales, punto M , y de los puntos circulares en la posición inicial, punto K1, en lafigura 2.7. En particular, el vector de posición del punto circular K1 está dado por
r⃗K1 = r⃗P1 − Z (2.38)
Similarmente, el vector de posición del punto central M está dado por
r⃗M = r⃗K1 −W = r⃗P1 − Z −W (2.39)
2.3.2. Propiedades Generales de las Curvas de Burmester.
En esta sección, se mostrarán algunas propiedades generales de las curvas de puntos centralesy circulares, conocidas en conjunto como curvas de Burmester. En particular, se mostrará cómolos polos de rotación forman parte de la curva de puntos centrales y los polos imagen formanparte de la curva de puntos circulares.
En primer lugar considere los polos imagen P12, P13, P14, P 123, P 1
24 y P 134. Todos estos puntos
representan polos de rotación entre dos posiciones: Los polos P12, P13, P14 entre las posiciones1−2, 1−3 y 1−4 respectivamente y los polos imagen P 1
23, P 124 y P 1
34, entre las posiciones 2−3,2− 4 y 3− 4 pero dibujados en la posición inicial 1, es decir, representan los puntos homólogosde los polos de rotación respectivos en la posición 1. De la sección 2.2.1, se sabe que cualquierpunto del plano yace en un arco de círculo; sin embargo, como estos seis puntos son polos derotación, en consecuencia los seis puntos forman parte de la curva de puntos circulares.Por otro lado, los polos P12, P13, P14, P23, P24 y P34, todos estos puntos representan polos derotación entre dos posiciones 1− 2, 1− 3 y 1− 4 y P23, P24 y P34, nuevamente, la sección 2.2.1indica que cualquier punto del plano es el centro de un arco de círculo sobre el que yacen las tresposiciones de un punto. Sin embargo, al ser estos puntos polos de rotación de dos posiciones,serán el centro de un arco de círculo sobre el que yacen no tres si no las cuatro posiciones deun punto. Por lo tanto, los seis puntos forman parte de la curva de puntos centrales.
Finalmente, Hartenberg y Denavit, [6], muestran como determinar los puntos Q′s, que for-man parte de las curvas de puntos centrales. Los puntos Qij se definen como las interseccionesde los lados opuestos de los cuadriláteros de polos opuestos. Es decir:
Qij ={Pik Pjk
Pil Pjlk ̸= i k ̸= j l ̸= i l ̸= j (2.40)
En particular
Q12 ={P13 P23
P14 P24Q13 =
{P12 P23
P14 P34Q14 =
{P12 P24
P13 P34
Q23 ={P12 P13
P24 P34Q24 =
{P12 P14
P24 P34Q34 =
{P13 P14
P23 P24
(2.41)

22 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
De manera semejante es posible definir los puntos Q1ij; se definen como las intersecciones de
los lados opuestos de los cuadriláteros de polos imagen opuestos. Es decir7:
Q1ij =
{P 1ik P
1jk
P 1il P
1jl
k ̸= i k ̸= j l ̸= i l ̸= j (2.42)
En particular se tiene:
Q12 ={P13 P
123
P14 P124
Q13 ={P12 P
123
P14 P134
Q14 ={P12 P
124
P13 P134
Q123 =
{P12 P13
P 124 P
134
Q124 =
{P12 P14
P 124 P
134
Q134 =
{P13 P14
P 123 P
124
(2.43)
Keller, [7], mostró en 1965, que con los polos y los puntos Q′s era posible realizar un esquemapreliminar de las curvas de Burmester.
Finalmente, para cuatro posiciones de precisión, existe, en general, un único punto del planoque yace en una línea recta en cuatro posiciones arbitrarias de un plano, ese punto, se llamapunto de Ball, vea el Apéndice A, y forma parte de la curva de puntos circulares. Correspondea un arco de círculo de radio infinito.
Mucho mayor detalle acerca de los métodos gráficos que durante mucho tiempo fue la únicaopción para calcular las curvas de Burmester se puede encontrar en Burmester, [2], Hartenbergy Denavit [6] y Luck y Modler [8].
2.4. Determinación del número de ramales de las curvas deBurmester.
El método para el cálculo de las curvas de Burmester basado en la solución del análisisde posición del mecanismo equivalente de cuatro barras permite desarrollar un sencillo criteriopara determinación del número de ramales en cada una de las curvas de Burmester —la curvade puntos circulares y la curva de puntos centrales. De la sección 2.3 es evidente que deter-minando el mecanismo equivalente en su posición inicial y conocidos los ángulos β2, β3, β4, ladeterminación de los puntos circulares y puntos centrales es inmediata, vea las ecuaciones (2.36,2.38 y 2.39). Sin embargo, es importante señalar que el análisis de posición de un mecanismoplano de cuatro barras tiene, para un valor arbitrario de la orientación del eslabón que se hayaseleccionado como motriz, dos posibles soluciones. En términos del análisis realizado, para cadavalor de β2, existirán, dos conjuntos de valores {β31, β41} y {β32, β42} que resuelven el análisisde posición del mecanismo equivalente. más aún, no hay razón alguna para elegir al eslabón 2como el motriz; el eslabón 4 puede ser sin duda alguna seleccionado como motriz y, con algunascondiciones, el eslabon 3, el acoplador, pudiera seleccionarse también como motriz. La presenciade estas dos posibles soluciones constituye la base para determinar el número de ramales de lascurvas de Burmester.
El criterio de Grashof permite determinar las características, en cuanto a la rotabilidad,de los eslabones de un mecanismo plano de cuatro barras. El criterio requiere determinar laslongitudes de los eslabones más largo, l, más corto, s, y los dos intermedios, p y q. Si ladesigualdad
l + s ≤ p+ q (2.44)
se satisface, el mecanismo plano de cuatro barras se dice que es de la clase I o es Grashof. Eneste caso, existe un eslabón que puede rotar 360◦ respecto a sus eslabones adyacentes. En caso
7Debe notarse que si uno de los subíndices es 1 entonces el polo de rotación “imagen” o el punto Q1 corres-ponden con los polos y puntos centrales originales.

2.4. RAMALES EN LAS CURVAS DE BURMESTER. 23
contrario, el mecanismo plano de cuatro barras se dice que es de la clase II o no es Grashof.En este caso, ninguno de los eslabones del mecanismo plano puede rotar 360◦ respecto a suseslabones adyacentes.
En el primer caso, cuando el mecanismo es de la clase I o es Grashof, cuando existe uneslabón que puede rotar 360◦ respecto a sus eslabones adyacentes, los resultados del análisisde posición del mecanismo equivalente forman dos conjuntos de valores S1 = {β2, β31, β41} yS2 = {β2, β32, β42} que no están conectados; es decir, no existe una secuencia de elementosde S1 o S2 que permita pasar de un conjunto a otro. En este caso, las curvas de Burmestertendrán, cada una de ellas, dos ramales.
En el segundo caso, cuando el mecanismo es de la clase II o no es Grashof, ningún eslabónpuede rotar 360◦ respecto a sus eslabones adyacentes, los resultados del análisis de posición delmecanismo equivalente forman dos conjuntos de valores S1 = {β2, β31, β41} y S2 = {β2, β32, β42}que están conectados; es decir, existe una secuencia de elementos de S1 que permita pasarde S1 a S2 y viceversa. En este caso, las curvas de Burmester tendrán, cada una de ellas, unúnico ramal.
Es importante señalar que [11], página 183, presentan un criterio erróneo para determinarel número de ramales de las curvas de Burmester. De manera semejante, Waldron y sus cola-boradores [3] presentan un complicado criterio para determinar el número de ramales de lascurvas de Burmester. El criterio indicado en este trabajo de tesis fue presentado hace más de20 años, [10]. Sin embargo, un análisis previo y mucho más completo fue presentado por Lucky Modler, [8], página 168.
En el resto de esta sección, se presentan dos ejemplos que ilustran los dos posibles casos delnúmero de ramales de las curvas de Burmester.
Ejemplo 1. Las cuatro posiciones de precisión que el mecanismo plano de cuatro barrasdebe satisfacer están determinadas por las coordenadas del punto de precisión y la orientacióndel eslabón acoplador. Suponga que, en este ejemplo, están dadas por
P1 = (1.0, 1.0)
P2 = (2.0, 0.5) θ12 = 0◦ = α2
P3 = (3.0, 1.5) θ13 = 45◦ = α3
P4 = (2.0, 2.0) θ14 = 90◦ = α4
Los números complejos necesarios para determinar los eslabones del mecanismo equivalente,están dadas por
δ2 = P2 − P1 = (1.0,−0.5) = 1.0− 0.5i eiα2 = 1.0
δ3 = P3 − P1 = (2.0,+0.5) = 2.0 + 0.5i eiα3 = 0.7071 + 0.7071i
δ4 = P4 − P1 = (1.0,+1.0) = 1.0 + 1.0i eiα4 = 1i
Además
c2 = eiα2 − 1 = 0
c3 = eiα3 − 1 = −0.2929 + 0.7071i
c4 = eiα4 − 1 = −1 + 1i
Después de estos cálculos, es posible determinar los números complejos asociados a los

24 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
eslabones del mecanismo equivalente y sus longitudes
∆2 =
∣∣∣∣ c3 δ3c4 δ4
∣∣∣∣ = 1.5− 1.0858i y su longitud l2 = 1.8517
∆3 = −∣∣∣∣ c2 δ2c4 δ4
∣∣∣∣ = −0.5 + 1.5i y su longitud l3 = 1.5811
∆4 =
∣∣∣∣ c2 δ2c3 δ3
∣∣∣∣ = −0.0607− 0.8536i y su longitud l4 = 0.8557
∆1 = −(∆2 +∆3 +∆4) = −0.9393 + 0.4393i y su longitud l1 = 1.037
Aplicando el criterio de Grashof, se tiene que el eslabón más largo, l, el más corto, s, y losdos restantes p y q están dados por
l = l2 = 1.8517, s = l4 = 0.85557, p = l3 = 1.5811 y q = l1 = 1.037
Por lo tanto, la suma de las longitudes están dadas por l + s = 2.7074, y p + q = 2.6181, demanera que
l + s = 2.7074 > 2.6181 = p+ q
por lo tanto, el mecanismo equivalente no es del tipo Grashof y las curvas de Burmester tienencada una de ellas —la curva de puntos circulares y la curva de puntos centrales— un únicoramal, vea la figura 2.9.
−2 −1 0 1 2 3
0
1
2
3
4
5
1
x
y
2
3
4
Punto de Ball (−1.4728,1.1757)
Figura 2.9: Ejemplo de curvas de Burmester con un único ramal.
Ejemplo 2. Las cuatro posiciones de precisión que el mecanismo plano de cuatro barrasdebe satisfacer están determinadas por las coordenadas del punto de precisión y la orientacióndel eslabón acoplador. Suponga que, en este ejemplo, están dadas por

2.5. INFORMACIÓN ADICIONAL DE LAS CURVAS DE BURMESTER. 25
P1 = (0, 0)
P2 = (1.67, 0.30) θ12 = 30◦ = α2
P3 = (2.03, 0.53) θ13 = 60◦ = α3
P4 = (2.06, 0.55) θ14 = 90◦ = α4
Los números complejos necesarios para determinar los eslabones del mecanismo equivalente,están dadas por
δ2 = P2 − P1 = 1.67 + 0.30i eiα2 = 0.866 + 0.5i
δ3 = P3 − P1 = 2.03 + 0.53i eiα3 = 0.5 + 0.866i
δ4 = P4 − P1 = 2.06 + 0.55i eiα4 = 0 + 1i
Además
c2 = eiα2 − 1 = −0.1340 + 0.5i
c3 = eiα3 − 1 = −0.5 + 0.866i
c4 = eiα4 − 1 = −1 + 1i
Después de estos cálculos, es posible determinar los números complejos asociados a loseslabones del mecanismo equivalente y sus longitudes
∆2 =
∣∣∣∣ c3 δ3c4 δ4
∣∣∣∣ = 1.0537 + 0.009i y su longitud l2 = 1.0537
∆3 = −∣∣∣∣ c2 δ2c4 δ4
∣∣∣∣ = −1.4190 + 0.4137i y su longitud l3 = 1.4781
∆4 =
∣∣∣∣ c2 δ2c3 δ3
∣∣∣∣ = 0.5578− 0.3523i y su longitud l4 = 0.6598
∆1 = −(∆2 +∆3 +∆4) = −0.1925− 0.0704i y su longitud l1 = 0.2050
Aplicando el criterio de Grashof, se tiene que el eslabón más largo, l, el más corto, s, y los dosrestantes p y q están dados por
l = l3 = 1.4781, s = l1 = 0.2050, p = l2 = 1.0537 y q = l4 = 0.6598
Por lo tanto, la suma de las longitudes están dadas por l + s = 1.6831, y p + q = 1.7135, demanera que
l + s = 1.6831 < 1.7135 = p+ q
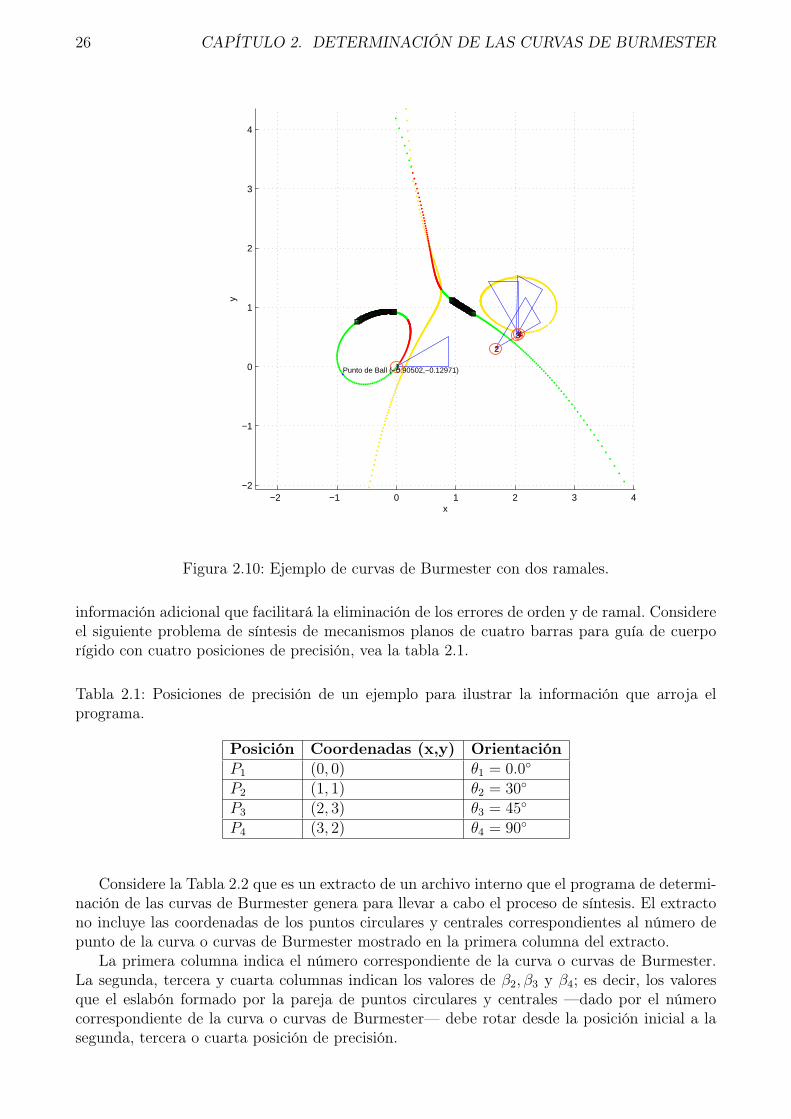
Por lo tanto, el mecanismo equivalente es del tipo Grashof y las curvas de Burmester tienencada una de ellas —la curva de puntos circulares y la curva de puntos centrales— dos ramales,vea la figura 2.10.
Es importante señalar que Erdman y Sandor [1986], en la página 183, erróneamente indicanque si el eslabón l2 del mecanismo equivalente es rotatorio, las curvas de Burmester tienen unúnico ramal.
2.5. Información adicional acerca de los puntos de las cur-vas de Burmester.
En esta sección final del presente capítulo, se mostrará como el procedimiento empleadoen este trabajo de tesis para determinar las curvas de Burmester permite además obtener
26 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
−2 −1 0 1 2 3 4−2
−1
0
1
2
3
4
1
x
y
2
3 4
Punto de Ball (−0.90502,−0.12971)
Figura 2.10: Ejemplo de curvas de Burmester con dos ramales.
información adicional que facilitará la eliminación de los errores de orden y de ramal. Considereel siguiente problema de síntesis de mecanismos planos de cuatro barras para guía de cuerporígido con cuatro posiciones de precisión, vea la tabla 2.1.
Tabla 2.1: Posiciones de precisión de un ejemplo para ilustrar la información que arroja elprograma.
Posición Coordenadas (x,y) OrientaciónP1 (0, 0) θ1 = 0.0◦
P2 (1, 1) θ2 = 30◦
P3 (2, 3) θ3 = 45◦
P4 (3, 2) θ4 = 90◦
Considere la Tabla 2.2 que es un extracto de un archivo interno que el programa de determi-nación de las curvas de Burmester genera para llevar a cabo el proceso de síntesis. El extractono incluye las coordenadas de los puntos circulares y centrales correspondientes al número depunto de la curva o curvas de Burmester mostrado en la primera columna del extracto.
La primera columna indica el número correspondiente de la curva o curvas de Burmester.La segunda, tercera y cuarta columnas indican los valores de β2, β3 y β4; es decir, los valoresque el eslabón formado por la pareja de puntos circulares y centrales —dado por el númerocorrespondiente de la curva o curvas de Burmester— debe rotar desde la posición inicial a lasegunda, tercera o cuarta posición de precisión.

2.5. INFORMACIÓN ADICIONAL DE LAS CURVAS DE BURMESTER. 27
Tabla 2.2: Extracto de los resultados internos del programa de síntesis.
Número β2 β3 β4 ϕ2 ϕ3 ϕ4 Ordende punto
506 10.00000◦ 21.57005◦ 21.77282◦ 20.00000◦ 23.42995◦ 68.22718◦ 1234507 9.90000◦ 21.37418◦ 21.51419◦ 20.10000◦ 23.62582◦ 68.48581◦ 1234508 9.80000◦ 21.17781◦ 21.25631◦ 20.20000◦ 23.82219◦ 68.74369◦ 1234509 9.70000◦ 20.98095◦ 20.99917◦ 20.30000◦ 24.01905◦ 69.00083◦ 1234510 9.60000◦ 20.78360◦ 20.74278◦ 20.40000◦ 24.21640◦ 69.25722◦ 1243511 9.50000◦ 20.58576◦ 20.48715◦ 20.50000◦ 24.41424◦ 69.51285◦ 1243512 9.40000◦ 20.38744◦ 20.23226◦ 20.60000◦ 24.61256◦ 69.76774◦ 1243
Debe notarse que se considera β1 = 0◦, de manera que para los puntos 506, 507, 508 y 509los ángulos de rotación satisfacen la condición
0.00000◦ = β1 < β2 < β3 < β4
Por lo tanto, el orden en el que el eslabón formado por la pareja de puntos circulares y centralesrecorre las posiciones de precisión está dada por 1234.
De manera semejante, para los puntos 510, 511 y 512 los ángulos de rotación satisfacen lacondición
0.00000◦ = β1 < β2 < β4 < β3
Por lo tanto, el orden en el que el eslabón formado por la pareja de puntos circulares y cen-trales recorre las posiciones de precisión está dada por 1243. Entre los puntos 509 y 510 debeencontrarse el polo de rotación P 1
34, que es la imagen del polo de rotación P34 en la primeraposición. Es decir, el punto en la primera posición del cuerpo rígido que cuando el cuerpo rígidose mueve a la tercera o cuarta posición, el punto se desplaza a la posición P 1
34. El orden en elcual el eslabón seleccionado recorre las posiciones de precisión se indica en la última columnade la Tabla 2.2.
Por otro lado, la quinta, sexta y séptima columna de la Tabla 2.2 indican los ángulos derotación del eslabón acoplador con respecto al eslabón asociado a la pareja de puntos circulares ycentrales indicado por la fila del extracto. Debe notarse que la orientación del eslabón acopladorestá dada por las posiciones de precisión indicadas en la definición del problema. Por lo tanto,
ϕi = θi − βi i = 1, 2, 3, 4
Así pues, para el punto circular correspondiente a la fila 506, los ángulos de osculación estándadas por
ϕ1 = θ1 − β1 = 0◦ − 0◦ = 0◦
ϕ2 = θ2 − β2 = 30◦ − 10◦ = 20◦
ϕ3 = θ3 − β3 = 45◦ − 21.57005◦ = 23.42995◦
ϕ4 = θ4 − β4 = 90◦ − 21.77282◦ = 68.22718◦
Debe notarse que los valores mínimos y máximos de los ángulos ϕi están dados por
ϕmín = ϕ1 = 0◦ ϕmáx = ϕ4 = 68.22718◦
De manera queΦ = ϕmáx − ϕmín = 68.22718◦ − 0◦ = 68.22718◦

28 CAPÍTULO 2. DETERMINACIÓN DE LAS CURVAS DE BURMESTER
Tanto el orden como los ángulos de rotación del eslabón acoplador con respecto al eslabónasociado a la pareja de puntos circulares y centrales jugarán un papel muy importante en laeliminación de los errores de orden y de ramal en la síntesis de mecanismos planos de cuatrobarras para guía de cuerpo rígido con cuatro posiciones de precisión.

Capítulo 3
Defectos de orden, ramal y Grashoff
En este capítulo se presentan las técnicas desarrolladas para la rectificación de los erroresde orden, ramal y Grashoff. El capítulo hace una referencia breve a las herramientas que sehan usado en el pasado y muestra cuales se seleccionaron o desarrollaron para la solución delproblema en este trabajo.
3.1. Rectificación del problema de orden.
Ya ha sido indicado que la selección arbitraria de parejas de puntos circulares y centralesconduce a mecanismos planos de cuatro barras que no pasan a través de posiciones de pre-cisión en el orden pre especificado. Para atacar este problema es necesario presentar algunasdefiniciones:
Definición. Asociada a cada pareja de un punto circular y su punto central correspondienteestá asociado un orden. Este es el orden en que el eslabón acoplador, recorre las posiciones deprecisión cuando la manivela, definida por una pareja formada por un punto circular y su puntocentral correspondiente, gira en un sentido dado, este orden se denomina orden del puntocircular u orden del punto central.
Waldron y su estudiante Strong, vea [14, 16], presentaron un método para determinar elorden del punto circular basado en la localización de los polos de rotación y la localización delpunto de Ball. El método se basa en la propiedad que tienen los polos de rotación, digamos elpolo Pij de que el ángulo de rotación —de la manivela asociada al polo de rotación y su puntocircular correspondiente— para que el cuerpo rígido que se desea desplazar entre las posicionesi y j es cero. Basta decir que la construcción gráfica y los argumentos, bastante espesos, noson necesarios cuando las curvas de Burmester se han determinado de la manera indicada enel capítulo 2.
Haciendo referencia a la tabla 2.2, que muestra los ángulos β2, β3 y β4, donde de antemanose sabe que β1 = 0◦. Resulta inmediata la determinación del orden asociado al punto circularcorrespondiente. Allí, la columna extrema derecha muestra el orden del punto circular, sinconsideración geométrica alguna, y además muestra que entre los puntos circulares 509 y 510de la curva se encuentra el polo de rotación P 1
34.Es importante reconocer que para efectos prácticos el orden 1234 y el 4321 son equivalentes,
la única diferencia es si el eslabón asociado a la pareja de un punto circular y del punto centralcorrespondiente, es en sentido horario y antihorario. Por lo tanto, el sentido no es relevante.Ocasionalmente, en problemas en los que no es posible tener acceso al eje del eslabón motrizde ambos lados, sólo uno de los sentidos será adecuado.
Finalmente, es importante notar que el problema de orden se aplica exclusivamente durantela selección del eslabón motriz del mecanismo plano de cuatro barras que se desea sintetizar.Por lo tanto, la selección de la pareja de un punto circular y de su punto central correspondiente
29

30 CAPÍTULO 3. DEFECTOS DE ORDEN, RAMAL Y GRASHOFF
al eslabón conducido está libre de estas restricciones que se aplican exclusivamente durante laselección de la pareja de un punto circular y de su punto central correspondiente al eslabónconductor.
3.2. Rectificación del problema de ramal.
El problema de ramal se presenta cuando una de las posiciones de precisión se presenta enun ramal de la solución del análisis de posición del mecanismo plano de cuatro barras mientrasque otra de las posiciones de precisión se presenta en el otro ramal de la solución del análisisde posición del mismo mecanismo plano de cuatro barras, vea la figura 3.1. Esta figura muestracomo dos posiciones de precisión de un problema de guía de cuerpo rígido pertenecen, cadauna de ellas, a un diferente ramal del análisis de posición de un mecanismo plano de cuatrobarras. En la parte izquierda de la figura se ha tomado la libertad de suponer que las dosposiciones de precisión ocurren para el mismo valor del ángulo de entrada del eslabón motriz,eslabón 2, una situación sumamente improbable. La parte izquierda de la figura muestra que ladiferencia entre los dos ramales del análisis de posición del mecanimso plano de cuatro barrasradica en el sentido del ángulo ϕ entre el eslabón de salida y el eslabón acoplador. Además,para pasar de un ramal a otro del análisis de posición de un mecanismo plano de cuatro barrases necesario pasar por una posición de puntos muertos. La parte derecha de la figura presentauna situación más frecuente en la que las dos posiciones de precisión ocurren para diferentevalor del ángulo de entrada del eslabón motriz, eslabón 2. Mas aún, el mecanismo plano esun mecanismo rotatorio-oscilatorio, a1 = 3.3341, a2 = 1.0992, a3 = 2.6959 y a4 = 1.8620 demanera que es imposible pasar de un ramal a otro sin desconectar los eslabones.
Figura 3.1: Ejemplo del defecto de ramal.
El problema de ramal fue uno de los primeros que se trataron de resolver, el primer intento,se debe a Beyer [1] quien, en 1953, presentó un método para evitar el error de ramal. Lasiguiente contribución es debida a Filemon, [4] quien, en 1972, presentó la que hasta la fecha sedenomina la Construcción de Filemon en base a la curva de puntos centrales. La siguientecontribución importante es debida a Waldron, [15], que presentó la construcción de Filemon enbase a la curva de puntos circulares.
La idea fundamental de la construcción de Filemon, tal como fue presentado por Waldron,[15], consiste en determinar los valores máximos y mínimos del ángulo de rotación del eslabónacoplador con respecto al eslabón asociado a la pareja de puntos circulares y centrales que se

3.3. RECTIFICACIÓN DEL PROBLEMA DE GRASHOFF. 31
ha seleccionado como eslabón conductor, ϕmín y ϕmáx. Estos valores se determinan a partir delos valores de la orientación de las posiciones de precisión θi y el ángulo de rotación del eslabóndeterminado por la pareja de puntos circulares y centrales determinados. Vea la sección 2.5
ϕi = θi − βi j = 1, 2, 3, 4.
A partir de estos valores, es posible determinar
Φ = ϕmáx − ϕmín
La construcción de Filemon consiste en dibujar, a partir del eslabón definido por la parejade puntos circulares y centrales, dos líneas infinitas obtenidas rotando el eslabón —determinadopor la pareja del punto circular y su punto central correspondiente— alrededor del punto circularde acuerdo con los ángulos −ϕmáx y −ϕmín donde los valores se toman en sentido algebraico.La región que incluye el eslabón y delimitada por las dos líneas dibujadas incluye todos lospuntos circulares que si se seleccionan conducen a mecanismos afectados por el defecto deramal. Consecuentemente, esta región está prohibida si se desea sintetizar un mecanismo libredel defecto de ramal.
Mas aún, siΦ ≥ 180◦
la región prohibida cubre todo el plano, de manera que esta selección del eslabón conductor irre-mediablemente conduce a mecanismos afectados del defecto de ramal. Consecuentemente, estospuntos circulares deben marcarse para evitar trabajo improductivo por parte del diseñador.
3.3. Rectificación del problema de Grashoff.La rectificación del problema de Grashoff es la más complicada pues para determinar si un
mecanismo es rotatorio-oscilatorio o doble rotatorio es necesario seleccionar las dos parejas depuntos circulares y puntos centrales. La primera pareja para determinar el eslabón conducido,a4 y la segunda pareja para determinar, inicialmente, el eslabón conductor o motriz, a2, peroal mismo tiempo el eslabón fijo, a1, y el eslabón acoplador, a4.
La determinación del tipo de mecanismo que se síntetiza, y en particular de si el eslabónmotriz es capaz de rotar se lleva a cabo mediante las condiciones de rotabilidad, que, en estecaso, son más eficientes que el criterio de Grashof.
Si el eslabón motriz es capaz de rotar, entonces es necesario determinar los ángulos de presiónmáximo, ϕmáx, y mínimo, ϕmín que proporcionan un buen índice de la calidad de movimientodel mecanismo plano de cuatro barras. Un ejemplo de valores recomendados para una buenaoperación de un mecanismo plano de cuatro barras son
ϕmáx ≤ 145◦ y ϕmín ≥ 45◦
De manera semejante otro indicador acerca de la calidad del mecanismo sintetizado es larelación entre la longitud máxima y la longitud mínima de los eslabones del mecanismo planode cuatro barras dado por amáx
amín. Un valor razonable de esta relación está dada por
amáx
amín≤ 4
Las técnicas mostradas en este capítulo se pondrán en práctica en el programa interactivoque se describe en el capítulo 4

32 CAPÍTULO 3. DEFECTOS DE ORDEN, RAMAL Y GRASHOFF
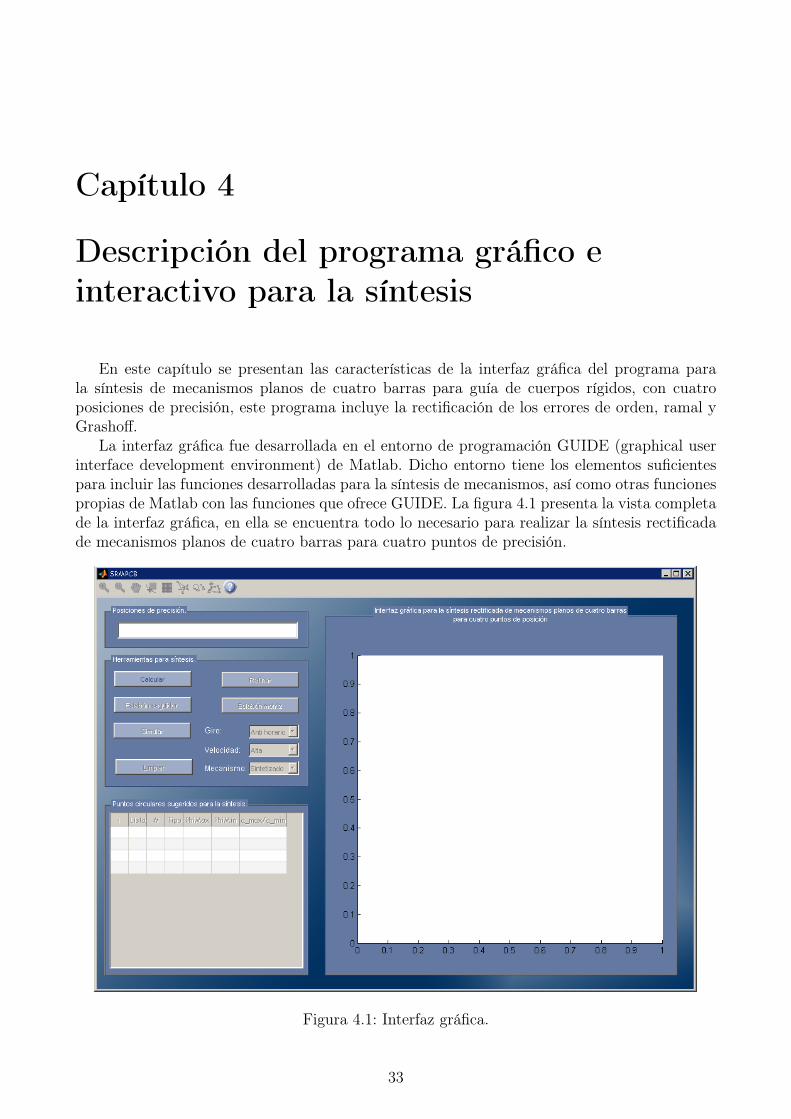
Capítulo 4
Descripción del programa gráfico einteractivo para la síntesis
En este capítulo se presentan las características de la interfaz gráfica del programa parala síntesis de mecanismos planos de cuatro barras para guía de cuerpos rígidos, con cuatroposiciones de precisión, este programa incluye la rectificación de los errores de orden, ramal yGrashoff.
La interfaz gráfica fue desarrollada en el entorno de programación GUIDE (graphical userinterface development environment) de Matlab. Dicho entorno tiene los elementos suficientespara incluir las funciones desarrolladas para la síntesis de mecanismos, así como otras funcionespropias de Matlab con las funciones que ofrece GUIDE. La figura 4.1 presenta la vista completade la interfaz gráfica, en ella se encuentra todo lo necesario para realizar la síntesis rectificadade mecanismos planos de cuatro barras para cuatro puntos de precisión.
Figura 4.1: Interfaz gráfica.
33

34 CAPÍTULO 4. DESCRIPCIÓN DEL PROGRAMA GRÁFICO PARA LA SÍNTESIS
4.1. La interfaz gráfica del programa.
La distribución de botones, iconos y gráficos fue realizada en paneles de tal manera que lainterfaz gráfica sea amigable e intuitiva, para que el uso de sus elementos y la interpretación delos resultados obtenidos sea lo mas simple posible para el usuario.
Figura 4.2: Barra de iconos.
4.1.1. Descripción de la barra de iconos.
A continuación se describen las funciones de cada uno de los iconos del programa, vea lafigura 4.2.
1. Zoom +/- Acerca o aleja la vista de los gráficos, al seleccionar una de las dos funciones yoprimir el botón izquierdo del ratón sobre el área gráfica.
2. Pan. Sirve para desplazarse en el gráfico sin modificar el zoom.
3. Data cursor. Al seleccionar esta función y oprimiendo el botón izquierdo del mouse, lafunción entrega las coordenadas del punto de la gráfica mas cercano al cursor.
4. Grid. Muestra u oculta la cuadrícula en los ejes del gráfico al oprimir el botón izquierdodel ratón sobre el icono.
5. Polos de rotación. Muestra u oculta los polos de rotación al oprimir el botón izquierdodel ratón sobre el icono.
6. Puntos Q’s. Muestra u oculta los puntos Q’s al oprimir el botón izquierdo del ratón sobreel icono.
7. Mecanismo sintetizado. Al oprimir el botón izquierdo del ratón sobre en el icono muestralos detalles del mecanismo sintetizado, así como su análisis de posición.
8. Ayuda. Muestra detalles del programa al oprimir el botón izquierdo del ratón sobre elicono.
4.1.2. Descripción de las herramientas para la síntesis.
A continuación se describen la función de las herramientas del programa para la síntesis,vea la figura 4.3.
1. Edit text. Campo para teclear las posiciones de precisión.

4.1. LA INTERFAZ GRÁFICA DEL PROGRAMA. 35
Figura 4.3: Herramientas para la síntesis.
2. Calcular. Inicia el cálculo de las curvas de Burmester oprimiendo el botón izquierdo delratón una vez ingresadas las posiciones de precisión.
3. Eslabón seguidor. Al oprimir el botón izquierdo del ratón sobre el icono podemos iniciarla síntesis del mecanismo seleccionando primeramente el eslabón seguidor. Este procesose lleva a cabo seleccionando el punto circular correspondiente.
4. Simular. Oprimiendo este botón se inicia la simulación del mecanismo sintetizado.
5. Limpiar. Al oprimir este botón, las curvas de Burmester, las construcciones gráficasadicionales y archivos de resultados se borran y es posible seleccionar un nuevo conjuntode posiciones de precisión.
6. Puntos sugeridos para síntesis. Los datos desplegados en la tabla muestran los posiblespuntos circulares que pueden seleccionarse como eslabón motriz. También muestra lascaracterísticas de ese mecanismo (rotabilidad y ángulos de transmisión). Al oprimir elbotón izquierdo del ratón sobre una fila de la tabla se completa la síntesis del mecanismo,seleccionando el eslabón motriz.
7. Refinar. Refina la curva de puntos circulares al oprimir el botón y seleccionar un puntode la curva de puntos circulares donde se desee calcular nuevos puntos.
8. Eslabón motriz. Habiendo previamente elegido el eslabón seguidor, oprimiendo el botónse selecciona el eslabón motriz. Este proceso se lleva a cabo seleccionando el punto circularcorrespondiente y, de esta manera, finaliza la síntesis del mecanismo.
9. Giro. Define el sentido de giro del eslabón motriz durante la simulación (horario o antihorario).
10. Velocidad. Define la velocidad con que se ejecuta la simulación del mecanismo sinteti-zado. La velocidad dependerá del hardware disponible en su PC.
11. Mecanismo. Determina el mecanismo que se va a simular, si el mecanismo sintetizadoo el mecanismo opuesto, cruzado.

36 CAPÍTULO 4. DESCRIPCIÓN DEL PROGRAMA GRÁFICO PARA LA SÍNTESIS
4.2. Determinación de las curvas de Burmester.Lo primero que el usuario debe hacer es ingresar las posiciones de precisión en el campo
«Edit Text» en forma matricial de acuerdo con el formato de Matlab. Luego oprimir el botón«Calcular» del panel de herramientas para síntesis y las curvas de Burmester aparecen en lainterfaz gráfica, vea la sección 5.1.
4.3. Rectificación del error de orden.Es importante distinguir e identificar el significado del color que pueden tener los puntos
que componen las curvas de Burmester. Estos colores pueden ser verdes, rojos y amarillos.Los puntos verdes representan puntos circulares libres del defecto de orden, los puntos rojosrepresentan puntos circulares con defecto de orden y los puntos amarillos representan a lospuntos centrales. Por lo tanto cuando se elige un punto circular para sintetizar el eslabónmotriz se elige un punto circular de color verde para rectificar el error de orden. Vea la figura4.4.
Figura 4.4: Identificación de puntos en las curvas de Burmester.
4.4. Rectificación del error de ramal.La interfaz del programa proporciona de manera gráfica la rectificación del error de ramal
utilizando la construcción de Filemon. En este caso una vez que se ha sintetizado el eslabónseguidor, el eslabón motriz deberá seleccionarse fuera del área sombreada para garantizar queel mecanismo sintetizado está libre del error de ramal, vea la figura 5.2. Hay que hacer notarque cuando se generan las curvas de Burmester se pueden identificar zonas color negro en lascurvas de puntos circulares, dichas zonas son pequeños cuadros color negro que contienen puntoscirculares. Tales cuadros, al inicio de la síntesis indican que si se selecciona un eslabón seguidoren ese punto, todos los puntos circulares restantes para elegir un eslabón motriz produciránmecanismos con defecto de ramal, por lo que desde el principio deben descartarse como posibleseslabones seguidores. Los puntos circulares con el identificador de cuadro negro pueden elegirse,en el proceso de síntesis, para producir un eslabón motriz ya que este identificador es irrelevanteen esta etapa del proceso de síntesis.
4.5. Rectificación del error de Grashoff.La rectificación del error de Grashoff se lleva a cabo eligiendo algún punto circular de la tabla
desplegada en el panel «Puntos sugeridos para la síntesis», en esa tabla la cuarta columna indicael tipo de mecanismo que se sintetiza al elegir ese punto de la lista. Por ejemplo, R-R rotatorio-rotatorio, R-O rotatorio-oscilatorio, O-O oscilatorio-oscilatorio y O-R oscilatorio-rotatorio.

Capítulo 5
Ejemplos y resultados
En este capítulo se mostrarán ejemplos representativos o importantes de la síntesis rectifi-cada, es decir, mecanismos sintetizados libres de defecto de orden, ramal y Grashoff. Además,se presentan ejemplos de mecanismos sintetizados con algún defecto, como una manera de ve-rificación de los métodos de rectificación de la síntesis1. Es importante que el usuario final delprograma tenga cuando menos los conocimientos básicos del uso del paquete Matlab. Por últimose analizarán los resultados obtenidos mediante el programa gráfico e interactivo desarrolladoen este trabajo de tesis.
5.1. Síntesis rectificada.
Primer ejemplo de la síntesis rectificada.
Se desea sintetizar un mecanismo para las posiciones de precisión mostradas en la tabla 5.1.Para ello se teclea en el «Edit Text» [ 0 0 0 ; -4.5 -3.6 30 ; -4 -7.65 60 ; -1.5 -9.8 90 ] y se oprimeen el botón «Calcular»2, se espera a que se realicen los cálculos y se muestren las curvas deBurmester3. Vea la figura 5.1.
Tabla 5.1: Posiciones de precisión.
Posición Coordenadas (x,y) OrientaciónP1 (0, 0) θ1 = 0.0o
P2 (−4.5,−3.6) θ2 = 30o
P3 (−4,−7.65) θ3 = 60o
P4 (−1.5,−9.8) θ4 = 90o
Una vez calculadas las curvas de Burmester, es posible oprimir el botón «Eslabón seguidor»y se puede seleccionar un punto en las curvas de puntos circulares. Como consecuencia sedibujará el eslabón seguidor y aparecerá la construcción de Filemon correspondiente. Para estecaso se eligió el punto circular con coordenadas (5.9614,−1.4012). Vea la figura 5.2.
1El lector puede usar los ejemplos que se muestran en este capítulo como parte de una introducción al manejode la interfaz gráfica.
2Es importante notar que los ángulos de orientación θj se determinan a partir de una posición inicial arbi-traria. Por lo tanto, es siempre posible seleccionar θ1 = 0o.
3En este momento el usuario puede activar o desactivar la vista de la malla, polos de rotación y puntos Q’s.Vea el Capítulo 4.
37
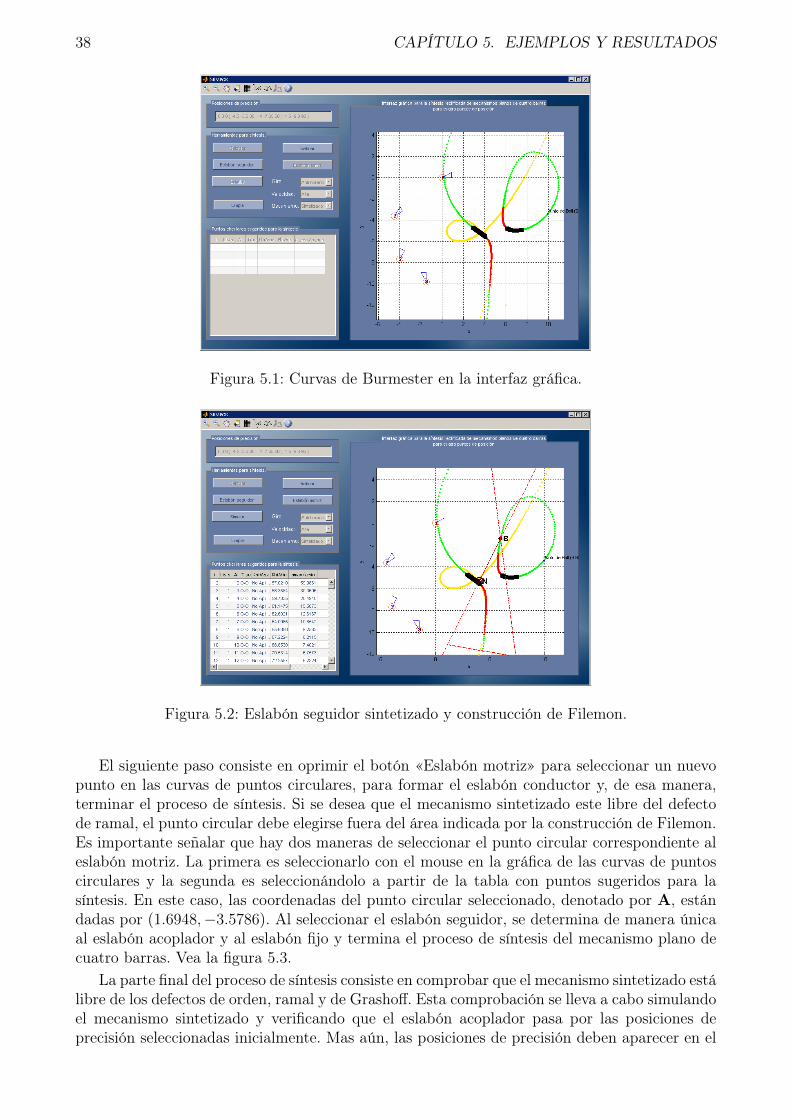
38 CAPÍTULO 5. EJEMPLOS Y RESULTADOS
Figura 5.1: Curvas de Burmester en la interfaz gráfica.
Figura 5.2: Eslabón seguidor sintetizado y construcción de Filemon.
El siguiente paso consiste en oprimir el botón «Eslabón motriz» para seleccionar un nuevopunto en las curvas de puntos circulares, para formar el eslabón conductor y, de esa manera,terminar el proceso de síntesis. Si se desea que el mecanismo sintetizado este libre del defectode ramal, el punto circular debe elegirse fuera del área indicada por la construcción de Filemon.Es importante señalar que hay dos maneras de seleccionar el punto circular correspondiente aleslabón motriz. La primera es seleccionarlo con el mouse en la gráfica de las curvas de puntoscirculares y la segunda es seleccionándolo a partir de la tabla con puntos sugeridos para lasíntesis. En este caso, las coordenadas del punto circular seleccionado, denotado por A, estándadas por (1.6948,−3.5786). Al seleccionar el eslabón seguidor, se determina de manera únicaal eslabón acoplador y al eslabón fijo y termina el proceso de síntesis del mecanismo plano decuatro barras. Vea la figura 5.3.
La parte final del proceso de síntesis consiste en comprobar que el mecanismo sintetizado estálibre de los defectos de orden, ramal y de Grashoff. Esta comprobación se lleva a cabo simulandoel mecanismo sintetizado y verificando que el eslabón acoplador pasa por las posiciones deprecisión seleccionadas inicialmente. Mas aún, las posiciones de precisión deben aparecer en el

5.1. SÍNTESIS RECTIFICADA. 39
Figura 5.3: Mecanismo sintetizado con la interfaz.
orden adecuado y sin que las posiciones de precisión aparezcan en diferentes configuracionesdel mecanismo. Asimismo, es posible analizar las dimensiones de los eslabones y los valoresmáximos y mínimos del ángulo de transmisión.
Para simular el mecanismo se elige el giro, velocidad o mecanismo que se necesite4 y se daclic en el botón «Simular». Aparecerá una nueva ventana en la que se presenta la simulación.Vea la figura 5.4.
Figura 5.4: Ventana de simulación del mecanismo.
Para ver las características del mecanismo sintetizado, de clic en el icono «Mecanismo sin-tetizado» y se mostraran las dimensiones de los eslabones, las coordenadas de los pares derevoluta, ángulos de transmisión y un análisis de posición del mecanismo. Vea la figura 5.5.
4Es posible simular el mecanismo sintetizado y la configuración cruzada del mismo.

40 CAPÍTULO 5. EJEMPLOS Y RESULTADOS
Figura 5.5: Características del mecanismo sintetizado.
Segundo ejemplo de la síntesis rectificada.
Ahora se sintetizara un mecanismo para las posiciones mostradas en la tabla 5.2 siguiendoel procedimiento explicado en el ejemplo anterior.
Tabla 5.2: Posiciones de precisión.
Posición Coordenadas (x,y) OrientaciónP1 (0, 0) θ1 = 0o
P2 (−4.5,−3.6) θ2 = 30o
P3 (−4,−7.65) θ3 = 60o
P4 (−1.5,−9.8) θ4 = 60o
Se teclean las posiciones de precisión de acuerdo al formato de Matlab ( [0 0 0;−4.5 −3.6 30;−4 − 7.65 60;−1.5 − 9.8 60] ) en el campo «Edit text», se da clic en el botón calcular yobtenemos las curvas de Burmester mostradas en la figura 5.6. Enseguida seleccionar el puntocircular con coordenadas (9.56,−4.87) para dibujar el eslabón seguidor, vea la figura 5.7. Unavez generado el eslabón seguidor se eligió el punto circular con coordenadas (−3.29, 1.22) paradibujar el eslabón motriz y la síntesis del mecanismo termina, vea la figura 5.8. A manera decomprobación se simuló el mecanismo sintetizado y se revisaron los detalles del mismo, vea lafigura 5.9 y 5.10 respectivamente.
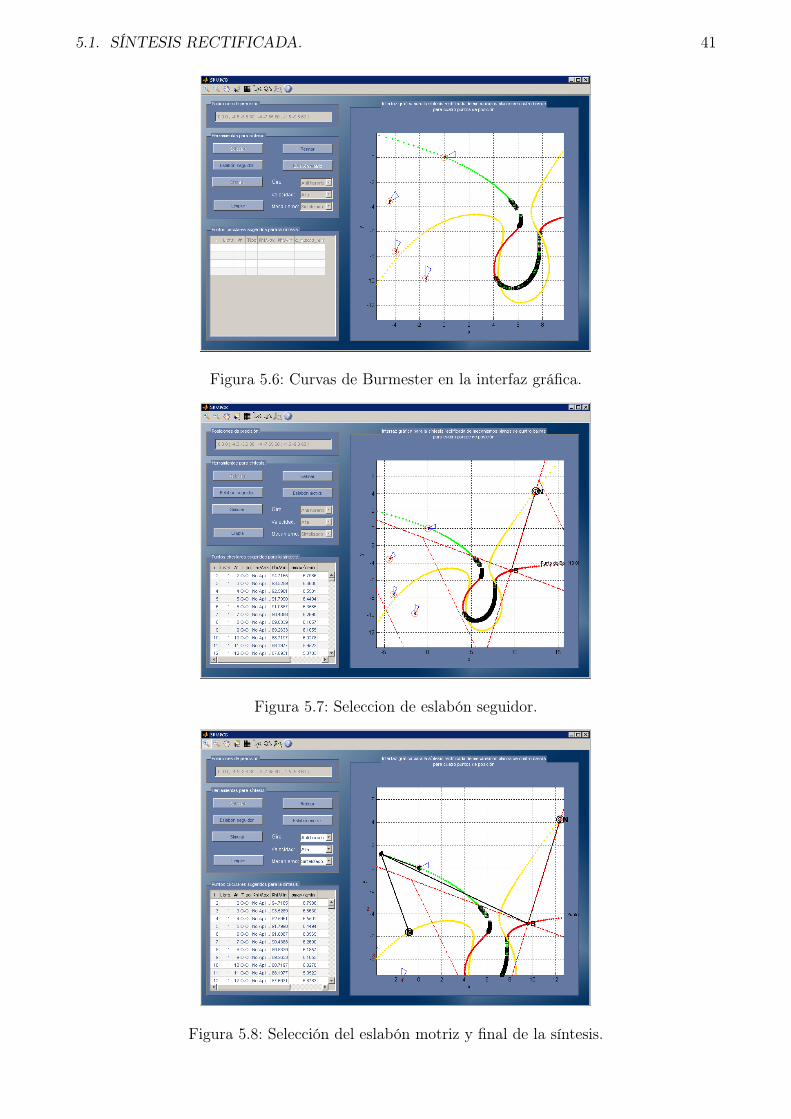
5.1. SÍNTESIS RECTIFICADA. 41
Figura 5.6: Curvas de Burmester en la interfaz gráfica.
Figura 5.7: Seleccion de eslabón seguidor.
Figura 5.8: Selección del eslabón motriz y final de la síntesis.
42 CAPÍTULO 5. EJEMPLOS Y RESULTADOS
Figura 5.9: Simulación del mecanismo sintetizado.
Figura 5.10: Especificaciones del mecanismo sintetizado.
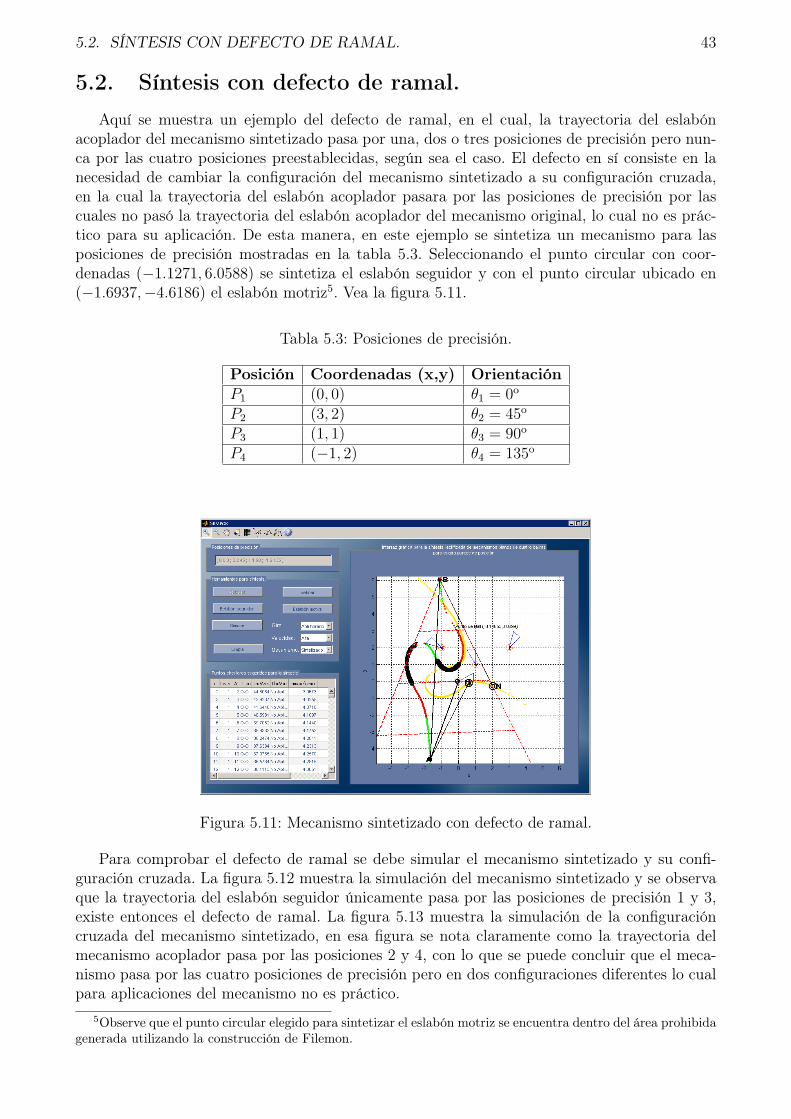
5.2. SÍNTESIS CON DEFECTO DE RAMAL. 43
5.2. Síntesis con defecto de ramal.Aquí se muestra un ejemplo del defecto de ramal, en el cual, la trayectoria del eslabón
acoplador del mecanismo sintetizado pasa por una, dos o tres posiciones de precisión pero nun-ca por las cuatro posiciones preestablecidas, según sea el caso. El defecto en sí consiste en lanecesidad de cambiar la configuración del mecanismo sintetizado a su configuración cruzada,en la cual la trayectoria del eslabón acoplador pasara por las posiciones de precisión por lascuales no pasó la trayectoria del eslabón acoplador del mecanismo original, lo cual no es prác-tico para su aplicación. De esta manera, en este ejemplo se sintetiza un mecanismo para lasposiciones de precisión mostradas en la tabla 5.3. Seleccionando el punto circular con coor-denadas (−1.1271, 6.0588) se sintetiza el eslabón seguidor y con el punto circular ubicado en(−1.6937,−4.6186) el eslabón motriz5. Vea la figura 5.11.
Tabla 5.3: Posiciones de precisión.
Posición Coordenadas (x,y) OrientaciónP1 (0, 0) θ1 = 0o
P2 (3, 2) θ2 = 45o
P3 (1, 1) θ3 = 90o
P4 (−1, 2) θ4 = 135o
Figura 5.11: Mecanismo sintetizado con defecto de ramal.
Para comprobar el defecto de ramal se debe simular el mecanismo sintetizado y su confi-guración cruzada. La figura 5.12 muestra la simulación del mecanismo sintetizado y se observaque la trayectoria del eslabón seguidor únicamente pasa por las posiciones de precisión 1 y 3,existe entonces el defecto de ramal. La figura 5.13 muestra la simulación de la configuracióncruzada del mecanismo sintetizado, en esa figura se nota claramente como la trayectoria delmecanismo acoplador pasa por las posiciones 2 y 4, con lo que se puede concluir que el meca-nismo pasa por las cuatro posiciones de precisión pero en dos configuraciones diferentes lo cualpara aplicaciones del mecanismo no es práctico.
5Observe que el punto circular elegido para sintetizar el eslabón motriz se encuentra dentro del área prohibidagenerada utilizando la construcción de Filemon.

44 CAPÍTULO 5. EJEMPLOS Y RESULTADOS
Figura 5.12: Simulación del mecanismo sintetizado con defecto de ramal.
Figura 5.13: Simulación de la configuración cruzada del mecanismo sintetizado.

5.3. SÍNTESIS CON DEFECTO DE ORDEN. 45
5.3. Síntesis con defecto de orden.En esta sección se mostrara un ejemplo de la síntesis de un mecanismo plano de cuatro
barras con defecto de orden pero libre de defecto de ramal y Grashoff. Se recomienda queel lector simule el mecanismo para que pueda comprobar y observar el defecto de orden. Eldefecto de orden en el mecanismo sintetizado consiste como su nombre lo dice en el paso deleslabón acoplador por las posiciones preestablecidas pero sin respetar el orden para el cual fuesintetizado, de esta manera el eslabón acoplador pasara por las posiciones pero sin el ordenrequerido. En este caso se sintetizara un mecanismo para las posiciones de precisión mostradasen la tabla 5.4. Seleccionando el punto circular con coordenadas (−1.6455, 6.7609) se sintetizael eslabón seguidor y con el punto circular ubicado en (5.4695, 11.109) el eslabón motriz6. Veala figura 5.14.
Tabla 5.4: Posiciones de precisión.
Posición Coordenadas (x,y) OrientaciónP1 (0, 0) θ1 = 0o
P2 (4, 6) θ2 = 40o
P3 (1, 0) θ3 = 60o
P4 (5,−8) θ4 = 90o
Figura 5.14: Mecanismo sintetizado con defecto de orden.
Es este caso siguiendo la curva del eslabón acoplador se puede observar que el orden es 1243,vea la figura 5.15. Revisando las tablas de datos generadas por el programa se puede encontrarque para el punto circular seleccionado como eslabón motriz corresponden los ángulos βi quesiguen: β1 = 0o, β2 = 88o, β3 = 211.07462o, β4 = 179.79051o, entonces β1 < β2 < β4 < β3 porlo que se comprueba el defecto de orden.
6Observe que el punto circular elegido para sintetizar el eslabón motriz es de color rojo, lo cual indica quesintetizara un mecanismo con defecto de orden.

46 CAPÍTULO 5. EJEMPLOS Y RESULTADOS
Figura 5.15: Simulación de mecanismo con defecto de orden.

5.4. SÍNTESIS CON DEFECTO DE GRASHOFF. 47
5.4. Síntesis con defecto de Grashoff.En esta sección se mostrara un ejemplo de mecanismo sintetizado con defecto de Grashoff,
el cual consiste en la limitación del eslabón motriz de girar 360o ya sea por puntos muertosinteriores o puntos muertos exteriores. Anteriormente se consideraba que un mecanismo planode cuatro barras con defecto de Grashoff era un mecanismo poco práctico por su incapacidadde rotar completamente, debido a la falta de dispositivos rotativos con los cuales se pudieracontrolar el ángulo de giro o a su alto costo. En la actualidad existen dispositivos rotativoscapaces de controlar el ángulo y sentido de giro y aún costo relativamente bajo según seanlas necesidades, por lo cual el defecto de Grashoff hoy en día no siempre es una limitante. Enalgunos casos podemos sintetizar mecanismos con defecto de Grashoff en los que aun cuandose cumpla la corrección del defecto de orden por las características propias del mecanismo setienen problemas de orden, pero en otras el orden se cumple como en el ejemplo que en estasección de muestra. Para sintetizar el mecanismo se usaron las posiciones de precisión mostradasen la tabla 5.5. Se ha seleccionado el punto circular con coordenadas (0.8352,−0.87614) parasintetizar el eslabón seguidor y con el punto circular ubicado en (0.45779, 0.29706) el eslabónmotriz. Vea la figura 5.16.
Tabla 5.5: Posiciones de precisión.
Posición Coordenadas (x,y) OrientaciónP1 (0, 0) θ1 = 0o
P2 (1,−2) θ2 = 124o
P3 (2,−1) θ3 = 45o
P4 (1, 0) θ4 = 5o
Figura 5.16: Mecanismo sintetizado con defecto de Grashoff.
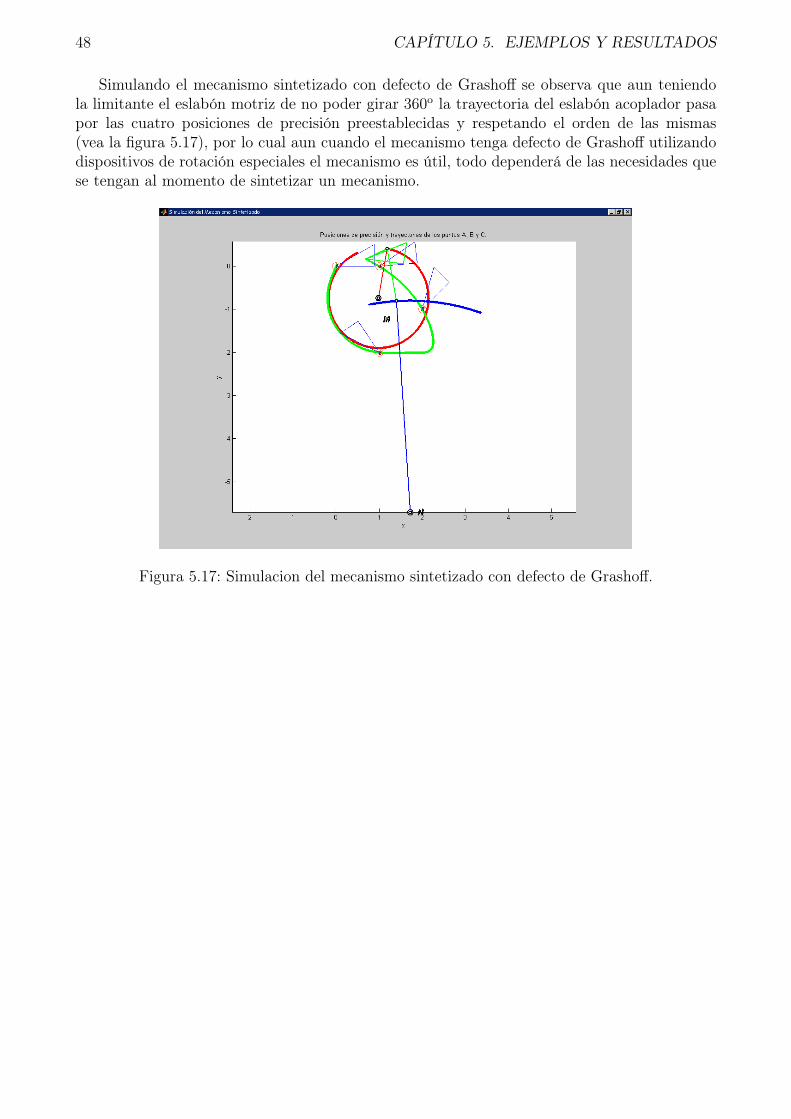
48 CAPÍTULO 5. EJEMPLOS Y RESULTADOS
Simulando el mecanismo sintetizado con defecto de Grashoff se observa que aun teniendola limitante el eslabón motriz de no poder girar 360o la trayectoria del eslabón acoplador pasapor las cuatro posiciones de precisión preestablecidas y respetando el orden de las mismas(vea la figura 5.17), por lo cual aun cuando el mecanismo tenga defecto de Grashoff utilizandodispositivos de rotación especiales el mecanismo es útil, todo dependerá de las necesidades quese tengan al momento de sintetizar un mecanismo.
Figura 5.17: Simulacion del mecanismo sintetizado con defecto de Grashoff.

Capítulo 6
Conclusiones y trabajo futuro
En este trabajo de tesis se presentó la formulación de la síntesis de mecanismos planos decuatro barras, para guía de cuerpos rígidos, con cuatro posiciones de precisión. La formula-ción incluye, para constituir una herramienta comprensiva de autoestudio, una revisión de losmétodos de síntesis con dos y tres posiciones de precisión.
De los posibles métodos para encontrar las curvas de Burmester, que constituyen el funda-mento de los métodos de síntesis de mecanismos planos de cuatro barras para guía de cuerporígido, se escogió el método del mecanismo equivalente. Este método obtiene como informaciónadicional, durante la construcción de las curvas de Burmester, los ángulos de rotación que losposibles eslabones motriz o seguidor de un mecanismo de cuatro barras necesitan rotar paraque el eslabón acoplador sea capaz de alcanzar las posiciones de precisión especificadas. Estainformación es muy relevante para explicar los métodos de síntesis rectificada de mecanimos; esdecir, los métodos necesarios para evitar que el mecanismo sintetizado adolezca de los defectosde orden, ramal y Grashof. Un estudio detallado de estos métodos también forma parte delpresente trabajo de tesis.
La tesis incluye, además, el desarrollo de un programa interactivo para llevar a cabo, demanera semi-automatizada, la síntesis de mecanismos planos de cuatro barras, para guía decuerpos rígidos, con cuatro posiciones de precisión. El programa fue realizado mediante el soft-ware Matlab c⃝ e incluye el desarrollo de interfaces gráficas para el usuario, GUI, que permitenal usuario realizar las tareas de síntesis de una manera bastante eficiente.
Finalmente, el trabajo de tesis presenta varios ejemplos de mecanismos planos de cuatrobarras sintetizados con ayuda del programa. Algunos de esos ejemplos presentan tareas desíntesis libres de los defectos de orden, ramal y Grashof, mientras que algunos otros tienenalguno de esos defectos.
Al realizar el presente trabajo se pudieron detectar las siguientes áreas de oportunidad:
1. El programa no se ha probado de manera completa, existen algunas combinaciones deposiciones de precisión para las cuales, el cálculo de las curvas de Burmester falla. Esnecesario mejorar el programa en ese aspecto.
2. La literatura más reciente incluye un nuevo tipo de error conocido como error de circuito.La relación entre el error de circuito y el error de ramal no parece clara. Es necesarioestablecer diferencias definitivas entre ambos tipos de error y desarrollar el o los métodospara evitar el error de circuito.
3. Una extensión relativamente simple pero necesaria es la conversión de la síntesis de me-canismos planos de cuatro barras para generación de funciones en el problema de guía decuerpo rígido equivalente y la solución del problema resultante.
49

50 CAPÍTULO 6. CONCLUSIONES Y TRABAJO FUTURO
4. La síntesis cinemática es únicamente el primer paso para el diseño de máquinas querealicen una tarea dada. Es importante notar que el paso inicial en el diseño de máquinases frecuentemente la especificación de las posiciones de precisión deseadas. Sin embargo,después de la síntesis del mecanismo plano de cuatro barras es necesario considerar lasmasas asociadas a los eslabones y las fuerzas y torques necesarios para operar la máquinaa la velocidad deseada. Evidentemente, esta tarea necesariamente involucra el balanceode los eslabones. Esta es una tarea pendiente para el cuerpo académico de Dinámica yRobótica.
Apéndices
51


Apéndice A.Determinación del Punto de Ball
Este apéndice presenta los fundamentos para la determinación del punto de Ball para cuatroposiciones de precisión, como se presenta en Freudenstein y Primrose [5].
Considere un sistema coordenado fijo OXY y un sistema coordenado móvil Oxy, fijo a uncuerpo rígido en movimiento. La posición de un cuerpo rígido queda determinada por la loca-lización del sistema coordenado móvil, fijo al cuerpo, respecto al sistema de referencia fijo, veala figura A.1.
Figura A.1: Localización del sistema de referencia móvil Oxy respecto del sistema de referenciafijo OXY .
La posición del origen del sistema móvil respecto al fijo, viene dado por el número complejo
aj = rjeiθj (1)
Donde j representa una posición cualquiera del cuerpo. La orientación del sistema de refe-rencia móvil está determinada por el ángulo φj. La posición, respecto al sistema de referenciafijo, de un punto del cuerpo rígido determinado, en el sistema de referencia móvil, mediante elnúmero complejo Z es
Zj = aj + zeiφj (2)
Dadas cuatro posiciones de precisión del cuerpo rígido asociado al sistema de referenciamóvil Oxy, el punto M , será el punto de Ball, si sus cuatro puntos homólogos M1, M2, M3, M4
yacen sobre una línea recta. De manera que el siguiente paso será obtener la ecuación de unarecta en el plano en términos de las coordenadas del punto expresada en números complejos.
La ecuación general de una recta, en coordenadas cartesianas, es
ax+ by + c = 0 (3)
53

54 APÉNDICES
Las coordenadas x y y pueden escribirse de manera conjunta mediante el número complejo
Z = x+ iy (4)
Por lo tanto, el complejo conjugado de Z está dado por
Z = x+ iy = x− iy (5)
De aquí que
x =1
2(Z + Z) y y =
1
2(Z − Z)i (6)
Sustituyendo la ecuación (6) en la ecuación (3), se obtiene la ecuación de una recta en elplano XY en notación compleja.
a1
2(Z + Z) + b
1
2(Z − Z)i+ C = 0 Z(
1
2a− 1
2bi) + Z(
1
2a+
1
2bi) + C = 0 (7)
Introduciendo la variableA0 ≡
1
2(a+ ib) (8)
se tiene que
A0 =1
2(a− ib) (9)
Por lo tanto, la ecuación general de una línea recta, en coordenadas complejas, viene dadapor
ZA0 + ZA0 +B0 = 0 (10)
donde B0 es una constante real.Concluyendo, si M es un punto de Ball asociado a cuatro posiciones de un cuerpo rígido,
será posible encontrar un número complejo A0 = a+ ib y un número real B0, tal que
A0(aj + zeiφj) + A0(aj + ze−iφj) +B0 = 0 j = 1, 2, 3, 4 (11)
Esta condición conduce al sistema de ecuaciones dado por la ecuación (12)a1 + zeiφ1 a1 e−iφ1 1a2 + zeiφ2 a2 e−iφ2 1a3 + zeiφ3 a3 e−iφ3 1a4 + zeiφ4 a4 e−iφ4 1
A0
A0
A0zB0
=
0000
(12)
El sistema de ecuaciones tendrá solución distinta de la trivial si, y sólo si, el determinantede la matriz de coeficientes es igual a 0; es decir,∣∣∣∣∣∣∣∣
a1 + zeiφ1 a1 e−iφ1 1a2 + zeiφ2 a2 e−iφ2 1a3 + zeiφ3 a3 e−iφ3 1a4 + zeiφ4 a4 e−iφ4 1
∣∣∣∣∣∣∣∣ = 0 (13)
Notando que la primera columna del determinante puede escribirse como la suma de doscolumnas, la segunda de las cuales puede expresarse como el múltiplo escalar de otra columna,es posible descomponer el determinante de la manera mostrada en la ecuación (14),
0 =
∣∣∣∣∣∣∣∣a1 a1 e−iφ1 1a2 a2 e−iφ2 1a3 a3 e−iφ3 1a4 a4 e−iφ4 1
∣∣∣∣∣∣∣∣+ z
∣∣∣∣∣∣∣∣eiφ1 a1 e−iφ1 1eiφ2 a2 e−iφ2 1eiφ3 a3 e−iφ3 1eiφ4 a4 e−iφ4 1
∣∣∣∣∣∣∣∣ (14)

55
Finalmentez = −N
D(15)
donde N , el numerador, representa el valor del primer determinante, y D, el denominador,representa el valor del segundo determinante de la ecuación (14).
El cálculo del denominador se efectuará a continuación
D = a1(−1)1+2
∣∣∣∣∣∣eiφ2 e−iφ2 1eiφ3 e−iφ3 1eiφ4 e−iφ4 1
∣∣∣∣∣∣+ a2(−1)2+2
∣∣∣∣∣∣eiφ1 e−iφ1 1eiφ3 e−iφ3 1eiφ4 e−iφ4 1
∣∣∣∣∣∣+a3(−1)3+2
∣∣∣∣∣∣eiφ1 e−iφ1 1eiφ2 e−iφ2 1eiφ4 e−iφ4 1
∣∣∣∣∣∣+ a4(−1)4+2
∣∣∣∣∣∣eiφ1 e−iφ1 1eiφ2 e−iφ2 1eiφ3 e−iφ3 1
∣∣∣∣∣∣ (16)
Considere la evaluación del determinante típico
∆lmn =
∣∣∣∣∣∣eiφl e−iφl 1eiφm e−iφm 1eiφn e−iφn 1
∣∣∣∣∣∣= (−1)1+3
∣∣∣∣eiφm e−iφm
eiφn e−iφn
∣∣∣∣+ (−1)2+3
∣∣∣∣eiφl e−iφl
eiφn e−iφn
∣∣∣∣+ (−1)3+3
∣∣∣∣ eiφl e−iφl
eiφm e−iφm
∣∣∣∣= [ei(φm−φn) − ei(φn−φm)]− [ei(φl−φn) − ei(φn−φl)] + [ei(φl−φm) − ei(φm−φl)]
= [ei(φm−φn) − e−i(φm−φn)]− [ei(φl−φn) − e−i(φl−φn)] + [ei(φl−φm) − e−i(φl−φm)] (17)
Sin embargo, las identidades de Euler establecen que
e−iθ = cos θ − i sen θ eiθ = cos θ + i sen θ (18)
De aquí queeiθ − e−iθ = 2 i sen θ (19)
Por lo tanto, el determinante típico está dado por
∆lmn = 2i [sen (φm − φn)− sen (φl − φn) + sen (φl − φm)] (20)
Usando repetidamente la fórmula (20), el denominador D resulta
D = −a1[sen (φ3 − φ4)− sen (φ2 − φ4) + sen (φ2 − φ3)]2i
+a2[sen (φ3 − φ4)− sen (φ1 − φ4) + sen (φ1 − φ3)]2i
−a3[sen (φ2 − φ4)− sen (φ1 − φ4) + sen (φ1 − φ2)]2i
+a4[sen (φ2 − φ3)− sen (φ1 − φ3) + sen (φ1 − φ2)]2i (21)
Por otro lado, para el cálculo del numerador, también se expande el determinante en basea la segunda columna, por lo tanto
N = a1(−1)1+2
∣∣∣∣∣∣a2 e−iφ2 1a3 e−iφ3 1a4 e−iφ4 1
∣∣∣∣∣∣+ a2(−1)2+2
∣∣∣∣∣∣a1 e−iφ1 1a3 e−iφ3 1a4 e−iφ4 1
∣∣∣∣∣∣+a3(−1)3+2
∣∣∣∣∣∣a1 e−iφ1 1a2 e−iφ2 1a4 e−iφ4 1
∣∣∣∣∣∣+ a4(−1)4+2
∣∣∣∣∣∣a1 e−iφ1 1a2 e−iφ2 1a3 e−iφ3 1
∣∣∣∣∣∣ (22)

56 APÉNDICES
Considere la evaluación del determinante típico de la ecuación (22). Expandiendo el deter-minante en base a la tercera columna, se tiene que
∆lmn =
∣∣∣∣∣∣al e−iφl 1am e−iφm 1an e−iφn 1
∣∣∣∣∣∣= (−1)1+3
∣∣∣∣am e−iφm
an e−iφn
∣∣∣∣+ (−1)2+3
∣∣∣∣al e−iφl
an e−iφn
∣∣∣∣+ (−1)3+3
∣∣∣∣ al e−iφl
am e−iφm
∣∣∣∣= [am e−iφn − an e
−iφm ]− [ale−iφn − ane
−iφl ] + [ale−iφm − ame
−iφl ] (23)
Mediante la sustitución repetida de la ecuación (23) en la ecuación (22) se tiene que N estádado por
N = −a1{[a3 e
−iφ4 − a4 e−iφ3 ]− [a2e
−iφ4 − a4e−iφ2 ] + [a2e
−iφ3 − a3e−iφ2 ]
}+a2
{[a3 e
−iφ4 − a4 e−iφ3 ]− [a1e
−iφ4 − a4e−iφ1 ] + [a1e
−iφ3 − a3e−iφ1 ]
}−a3
{[a2 e
−iφ4 − a4 e−iφ2 ]− [a1e
−iφ4 − a4e−iφ1 ] + [a1e
−iφ2 − a2e−iφ1 ]
}+a4
{[a2 e
−iφ3 − a3 e−iφ2 ]− [a1e
−iφ3 − a3e−iφ1 ] + [a1e
−iφ2 − a2e−iφ1 ]
}(24)
Finalmente, la sustitución de las ecuaciones (21) y (24) en la ecuación (15) determina lalocalización del punto de Ball. Es importante notar que existen casos especiales para los cualesel punto de Ball es múltiple.
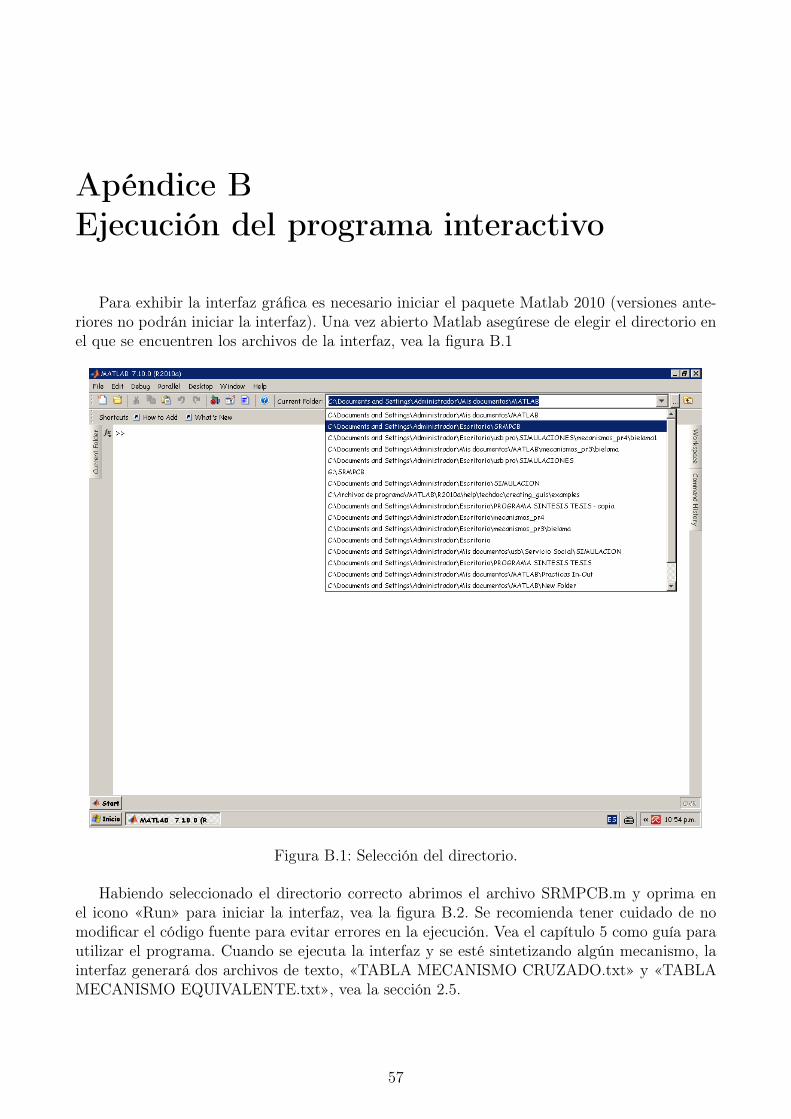
Apéndice BEjecución del programa interactivo
Para exhibir la interfaz gráfica es necesario iniciar el paquete Matlab 2010 (versiones ante-riores no podrán iniciar la interfaz). Una vez abierto Matlab asegúrese de elegir el directorio enel que se encuentren los archivos de la interfaz, vea la figura B.1
Figura B.1: Selección del directorio.
Habiendo seleccionado el directorio correcto abrimos el archivo SRMPCB.m y oprima enel icono «Run» para iniciar la interfaz, vea la figura B.2. Se recomienda tener cuidado de nomodificar el código fuente para evitar errores en la ejecución. Vea el capítulo 5 como guía parautilizar el programa. Cuando se ejecuta la interfaz y se esté sintetizando algún mecanismo, lainterfaz generará dos archivos de texto, «TABLA MECANISMO CRUZADO.txt» y «TABLAMECANISMO EQUIVALENTE.txt», vea la sección 2.5.
57

58 APÉNDICES
Figura B.2: Ejecución de la interfaz.

Apéndice CDiagrama de secuencia general para laejecución del programa
Este apéndice presenta el diagrama de flujo de información del programa. El diagramade flujo menciona además las funciones que realizan las operaciones necesarias para realizar lasíntesis y, de esa manera, el usuario tenga un mayor conocimiento de la operación del programa.
Figura C.1: Diagrama de secuencia general del programa interactivo.
59

60 APÉNDICES

Bibliografía
[1] Beyer, R. (1953), «Kinematische Getriebesynthese: Grundlagen einer quantitativen Ge-triebelehre ebener Getriebe», Berlin: Springer Verlag.
[2] Burmester, L. (1888), «Lehrbuch der Kinematik», Leipzig: Verlag von Arthur Felix.
[3] Chuang, J.C., Strong, R. T. y Waldron, K. J. (1981), Implementation of Solution Rec-tification Techniques in an Interactive Linkage Synthesis Program, «ASME Journal ofMechanical Design», Vol. 103, pp. 657-664
[4] Filemon, E., (1972) Useful Ranges of Centerpoint Curves for Design of Crank-and-RockerLinkages, «Mechanism and Machine Theory», Vol. 7, No. 4, pp. 47-53.
[5] Freudenstein, F y Primose, E. J. F., (1980), On the Ball Point Associated with FiniteCoplanar Displacements of a Rigid Body, «Mechanism and Machine Theory», Vol. 16,No. 4, pp. 267-275.
[6] Hartenberg, R.S. y Denavit, J. (1964) «Kinematic Synthesis of Linkages», New York: McGraw Hill Book Co.
[7] Keller, R. E., (1965), Sketching Rules for the Curves of Burmester Mechanism Synthesis,«ASME Journal of Engineering for Industry», Vol. 87, pp. 155-160.
[8] Luck, K y Modler, K. H. (1990) «Getriebetechnik: Analyse, Synthese, Optimierung»,Wien: Springer-Verlag.
[9] Orozco Mendoza, H. (1981) «Síntesis de Mecamismos de Cuatro Barras Para Guía deCuerpo Rígido y su Implementación en Computadora Digital», Tesis de Licenciatura In-geniería Mecánica, Instituto Tecnológico de Celaya.
[10] Rico Martínez, J. M., (1991) Some Additional Results on Burmester Theory, «EighthWorld Congress on the Theory of Machines ans Mechanisms», Prague, Czechoslovakia,August 26-31, 1991, pp. 51-54.
[11] Sandor, G. N. y Erdman, A. G. (1984), «Advanced Mechanism Design: Analysis andSynthesis, Volume 2», Englewood Cliffs, New Jersey: Prentice-Hall, Inc.
[12] Suh, C. H. y Radcliffe, C. W., (1967) Synthesis of Plane Linkages With Use of the Dis-placement Matrix, «ASME Journal of Engineering for Industry», Vol. 89, pp. 206-214.
[13] Suh, C. H. y Radcliffe, C. W., (1978), «Kinematics and Mechanisms Design», New York:John Wiley and Sons Inc.
[14] Waldron, K. J., (1975), The Order Problem of Burnester Linkage Synthesis, «ASMEJournal of Engineering for Industry», Vol. 97, pp. 1405-1406.
61

62 BIBLIOGRAFÍA
[15] Waldron, K. J., (1976), Elimination of the Branch Problem in Graphical Burmester Me-chanism Synthesis for Four Finitely Separated Positions, «ASME Journal of Engineeringfor Industry», Vol. 98, pp. 176-182.
[16] Waldron, K. J. y Strong, R. T., (1978), Improved Solutions of the Branch and OrderProblems of Burmester Linkage Synthesis, «Mechanism and Machine Theory», Vol. 13,pp. 199-207.


















