Serie Bcms.dm.uba.ar/depto/public/Serie B/serieB11.pdf · 2017. 3. 27. · Pablo Amster 1. Prefacio...
120
Fascículo 11 Cursos y seminarios de matemática Serie B Departamento de Matemática Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires 2017 ISSN 1851-149X Pablo Amster Ecuaciones diferenciales con retardo
Transcript of Serie Bcms.dm.uba.ar/depto/public/Serie B/serieB11.pdf · 2017. 3. 27. · Pablo Amster 1. Prefacio...

Fascículo 11 Cursos y seminarios de matemática
Serie B
Departamento de Matemática
Facultad de Ciencias Exactas y Naturales
Universidad de Buenos Aires
2017
ISSN 1851-149X
Pablo Amster
Ecuaciones diferenciales con retardo

Cursos y Seminarios de Matemática – Serie B
Fascículo 11
Comité Editorial:
Carlos Cabrelli (Director)Departamento de Matemática, FCEyN, Universidad de Buenos AiresE-mail: [email protected]
Gabriela JerónimoDepartamento de Matemática, FCEyN, Universidad de Buenos AiresE-mail: [email protected]
Claudia LedermanDepartamento de Matemática, FCEyN, Universidad de Buenos AiresE-mail: [email protected]
Leandro VendraminDepartamento de Matemática, FCEyN, Universidad de Buenos Aires. E-mail: [email protected]
ISSN 1851-149X (Versión Electrónica)ISSN 1851-1481 (Versión Impresa)
Derechos reservados© 2017 Departamento de Matemática, Facultad de Ciencias Exactas y Naturales,
Universidad de Buenos Aires.Departamento de MatemáticaFacultad de Ciencias Exactas y NaturalesUniversidad de Buenos AiresCiudad Universitaria – Pabellón I(1428) Ciudad de Buenos AiresArgentina.http://www.dm.uba.are-mail. [email protected]/fax: (+54-11)-4576-3335

Ecuaciones diferenciales con retardo
Pablo Amster
1

Prefacio
Estas notas estan basadas en los contenidos de la materia optativa “Ecuacionesdiferenciales con retardo”, dictada en el Departamento de Matematica de laFacultad de Ciencias Exactas y Naturales de la Universidad de Buenos Airesdurante el primer cuatrimestre de 2016.
Las ecuaciones diferenciales con retardo son de gran interes y tienen aplica-ciones a diversas areas. Desde el punto de vista puramente matematico, llamala atencion el hecho de que el estudio de uno de los casos mas elementales, laecuacion lineal de primer orden con coeficientes constantes lleva a lidiar desdeel comienzo con aspectos profundos del analisis complejo. Justamente ese esnuestro punto de partida: al cabo de una breve presentacion, se analizan concierto detalle las ecuaciones con retroalimentacion o feedback para introducir demanera elemental las nociones generales de estabilidad y oscilaciones. Luego sedescriben algunos resultados ligados a la linealizacion de ecuaciones escalarespara pasar al estudio de sistemas. A continuacion se presentan los principalesaspectos de la teorıa general, desde existencia y unicidad para el problema devalores iniciales (donde, como veremos, el ‘valor inicial’ no es un punto sinouna funcion), extension de soluciones e intervalo maximal hasta cuestiones massutiles, como la generalizacion del teorema de existencia de Peano (sin pedirla condicion de Lipschitz) o la busqueda de soluciones periodicas por mediodel operador de Poincare. Para tales fines, se brinda una prueba elemental delteorema de Schauder, que permite asegurar la existencia de puntos fijos de cier-tos operadores en espacios de dimension infinita. Finalmente se tratan algunascuestiones ligadas a la dinamica: tras presentar las nociones generales de lossistemas semidinamicos inducidos por las ecuaciones con retardo, la exposicionse enfoca en el estudio de la estabilidad por medio de funciones de Lyapunov(que, en rigor, son funcionales) para concluir con los fundamentos de la teorıade bifurcaciones de Hopf.
En la medida de lo posible, se ha procurado que el texto sea autocontenido,aunque su lectura requiere un conocimiento de los temas basicos de ecuacionesdiferenciales ordinarias, de espacios metricos y de analisis complejo. Algunos co-mentarios incidentales recurren a nociones mas avanzadas del analisis funcional,aunque el lector no versado en el tema podra pasarlos por alto sin mayor cargode conciencia. En el apendice se presenta una lista de temas ‘indispensables’para poder comprender casi la totalidad de las cuestiones que aquı se plantean.El material teorico se acompana de algunos ejercicios que abarcan la mayorparte de los temas tratados.
Para la organizacion y presentacion general de los temas se ha seguido fun-damentalmente la primera parte del excelente libro introductorio de Smith [8].Para el tratamiento de algunos temas que requieren mayor profundidad se haconsultado el libro de Hale [4] y, en ciertos aspectos bien especıficos, otros textoscomo el de Gyori y Ladas [3] o el de Bellman y Cooke [1]. Quiero agradecer alos alumnos del curso que colaboraron con sus comentarios y lecturas crıticasde estas notas.
2

Contenidos
1 Introduccion 4
2 Motivacion - Modelos de crecimiento poblacional 5
3 Ecuacion con retroalimentacion o feedback 10
4 Ecuaciones lineales de primer orden con coeficientes constantes 224.1 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Linealizacion 28
6 Sistemas lineales generales 386.1 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7 Teorıa basica: Existencia y unicidad 447.1 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
8 Teorema de Schauder 538.1 Operador de Poincare en dimension infinita . . . . . . . . . . . . 598.2 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9 Sistemas (semi)dinamicos 689.1 Sistemas monotonos . . . . . . . . . . . . . . . . . . . . . . . . . 809.2 Funciones de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . 889.3 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
10 Bifurcaciones de Hopf 9710.1 Metodo de averaging . . . . . . . . . . . . . . . . . . . . . . . . . 10210.2 Situacion general . . . . . . . . . . . . . . . . . . . . . . . . . . . 10510.3 La ecuacion con feedback negativo . . . . . . . . . . . . . . . . . 11110.4 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
11 Apendice 11611.1 Repaso de ecuaciones ordinarias (ejercicios) . . . . . . . . . . . . 11611.2 Repaso general . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
3

1 Introduccion
Con probabilidad muy cercana a 1, la primera clase de un curso basico sobreecuaciones diferenciales tomado al azar comienza con el mas comun de todoslos ejemplos:
x′(t) = x(t).
Mas alla de las bromas estudiantiles sobre la funcion exponencial1, todo elmundo acepta inmediatamente que x(t) = et es una solucion y, con un mınimoesfuerzo adicional, se convence de que todas las soluciones son de la formax(t) = Cet, en donde C es una constante arbitraria. Podemos suponer C ∈ C yentonces es facil ver que la formula obtenida abarca todas las posibles solucionescomplejas de la ecuacion. Muy pronto, esta idea elemental se transforma en unmetodo general para obtener soluciones de ecuaciones lineales con coeficientesconstantes: “proponer” soluciones de la forma x(t) = eλt y hallar los valoresde λ que anulan el polinomio caracterıstico asociado a la ecuacion. Claro queen nuestro ejemplo, el metodo se torna bastante trivial: como
(eλt)′
= λeλt, alreemplazar en la ecuacion resulta
λeλt = eλt.
En otras palabras, se obtiene la ecuacion P (λ) = 0, donde el polinomio carac-terıstico es P (λ) := λ− 1 obviamente tiene el valor λ = 1 como unica raız.
Sin embargo, la situacion cambia de manera drastica si suponemos que laecuacion tiene un retardo τ > 0, vale decir
x′(t) = x(t− τ).
En efecto, ahora al reemplazar x(t) = eλt en la ecuacion resulta
λx(t) = x(t− τ) = eλ(t−τ) = e−λτx(t).
En consecuencia λ debe ser solucion de la ecuacion caracterıstica P (λ) = 0,donde P ya no es un polinomio sino la funcion trascendente P (λ) := λ− e−λτ .Dado que λ = 0 no es raız, podemos reemplazar z = 1
λ y escribir la ecuacionanterior como
ze−τ/z = 1.
Notemos ahora que la funcion g(z) = ze−τ/z tiene una singularidad esencial enz = 0 y no se anula en C\0; luego, por el teorema de Picard se deduce queg−1(1) tiene infinitos elementos. Como los ceros de P son aislados, concluimosque las soluciones de la ecuacion caracterıstica forman un conjunto de la formaλkk∈N con |λk| → ∞. Esto implica que la ecuacion diferencial tiene infinitassoluciones complejas de la forma x(t) := eλkt; mas aun, cualquier combinacionlineal compleja de estas funciones tambien es solucion, de modo que el espaciode soluciones tiene dimension infinita. Esto vale tambien si estamos interesadosunicamente en las soluciones reales, pues resulta claro que x es solucion compleja
1‘Eh, integrate’. ‘¿Para que? Da igual.’
4

si y solo tanto Re(x) como Im(x) son soluciones reales. ¿Son estas todas lassoluciones posibles? Es facil ver que no aunque, como veremos mas adelante, latarea de caracterizar el conjunto de soluciones requiere un poco mas de trabajo.
Es tiempo de aclarar que no hace falta en realidad que el lector vaya corriendoa repasar en detalle todos los temas que hemos mencionado; el objetivo de estaintroduccion era dar una primera idea acerca de la complejidad del tema quevamos a estudiar. A partir del mas elemental de los ejemplos hemos llegado,en pocas lıneas, a invocar uno de los teoremas mas profundos e interesantes delanalisis complejo, de modo que cabe esperar en esta materia un recorrido de lomas atractivo, que involucra diversas ramas de la matematica.
2 Motivacion - Modelos de crecimiento pobla-cional
La manera mas sencilla de describir el crecimiento de una poblacion esta dadapor el modelo de Malthus. Se asume que existe una tasa b > 0 de nacimientosy una tasa d > 0 de muertes; de esta forma, si N es la poblacion en el instantet, se tiene:
N ′(t) = −dN(t) + bN(t).
Sin duda se trata de un modelo poco realista, pero su resolucion es muy simpley servira como primera motivacion para estudiar ecuaciones mas generales. Sila poblacion inicial es N(0) = N0, la solucion es N(t) = N0e
(b−d)t, cuyo com-portamiento depende del signo de b−d. Como se trata de poblaciones, es logicosuponer N0 > 0; en tal caso la solucion crece y tiende a infinito para t → +∞cuando b > d y decrece hacia 0 para t → +∞ cuando b < d. El valor b = dno tiene mayor interes, pues dice que la poblacion se mantiene constantementeigual a N0. Para b 6= d, la unica solucion constante o equilibrio es N ≡ 0. Note-mos que las anteriores observaciones respecto del comportamiento de la solucionpara t→ +∞ siguen valiendo incluso cuando N0 < 0, vale decir:
limt→+∞
|N(t)| = +∞ si b < d
ylim
t→+∞N(t) = 0 si b < d
Esto se expresa diciendo que N = 0 es un equilibrio inestable cuando b > d yasintoticamente estable cuando b < d. Tambien se puede decir, en este ultimocaso, que N = 0 es un atractor global del sistema, pues la convergencia a 0 severifica para cualquier valor inicial.2
Un poco mas apropiado es el modelo logıstico de Verhulst, en el cual seasume que la poblacion se autorregula, condicionada por algun factor que limita
2Mas adelante veremos una definicion precisa de todos estos conceptos; por ahora, bastaracon la idea intuitiva de que un equilibrio e es estable cuando las soluciones que comienzan cercade e se mantienen cercanas para todo t > 0, y asintoticamente estable si ademas convergen alequilibrio e para t→ +∞.
5

su crecimiento indefinido (por ejemplo, escasez de algun recurso). Se supone unvalor maximo M tolerable de poblacion; de esta manera, la poblacion crececuando N0 es menor que dicho valor y decrece cuando es mayor. Una manerade obtener este comportamiento consiste en asumir que la tasa de crecimientoN ′
N es proporcional a la diferencia M −N , es decir
N ′(t)
N(t)= c(M −N(t))
con c > 0, o bienN ′(t) = N(t)(b− aN(t))
donde b, a > 0. La ventaja de escribirlo de esta ultima forma es que podemosaceptar N ≡ 0 como solucion; la ecuacion tiene ademas otro equilibrio que es elvalor M := b
a . Esta ecuacion tambien es facil de integrar empleando fraccionessimples; la solucion general para N0 6= 0 tiene la forma
N(t) =b
a+ Ce−bt,
con C := bN0−a. Por supuesto, los valores iniciales N0 < 0 no tienen sentido en
el modelo biologico; es facil ver, en este caso, que la solucion no esta globalmentedefinida en el intervalo [0,+∞) pues se hace infinita cuando t se aproxima al
valor ln(−C/a)b . Para N0 > 0, se comprueba que N(t) → b
a si t → +∞, lo que
muestra que el equilibrio N ≡ ba es (localmente) asintoticamente estable, mien-
tras que N ≡ 0 es inestable. Esto resulta evidente, pues conocemos la solucion ypodemos calcular el lımite; sin embargo, a fin de analizar ejemplos mas abstrac-tos es util ver como se obtienen las mismas conclusiones directamente a partirde la ecuacion. Supongamos por ejemplo que N0 > b
a , entonces inicialmente
resulta N ′(t) < 0. Observemos, ademas, que N(t0) 6= ba para todo t0, pues el
problema de valores iniciales
N ′(t) = N(t)(b− aN(t)), N(t0) =b
a
tiene por unica solucion el equilibrio N ≡ ba . Se deduce que N(t) > b
a paratodo t > 0 y, en consecuencia, decrece. Por resultados clasicos de la teorıa deecuaciones ordinarias, N esta definida en [0,+∞) y, ademas, converge a un valorlımite N∗ ≥ b
a . Reemplazando en la ecuacion se deduce que
limt→+∞
N ′(t) = N∗(b− aN∗).
Por otra parte, observemos, por ejemplo, que para todo k ∈ N vale
N(k + 1)−N(k) = N ′(tk)
para cierto tk ∈ (k, k + 1), lo que prueba que N∗(b− aN∗) = 0 y, en definitiva,que N∗ = b
a . Un razonamiento analogo vale para las soluciones que comienzan
6

con un valor N0 ∈(0, ba
). Notemos que el equilibrio N ≡ b
a es asintoticamenteestable pero no un atractor global, pues solo convergen a el aquellas solucionesque comienzan con un valor inicial positivo. Por ejemplo, en el siguiente graficose muestran dos trayectorias para a = 1 y b = 2:
La idea de introducir un retardo en este tipo de modelos surge de efectuarla sencilla suposicion de que los nuevos individuos tardan un cierto tiempo τen alcanzar la madurez (algunos mas que otros, claro... aunque esto no setendra en cuenta aquı). En general, se entiende que la ‘madurez’ viene dadapor la capacidad de reproducirse; entonces los dos modelos anteriores tomanrespectivamente las siguientes formas:
N ′(t) = −dN(t) + bN(t− τ)
yN ′(t) = N(t)(b− aN(t− τ)).
A diferencia del modelo sin retardo, ya no es facil obtener soluciones explıcitasmas alla de los equilibrios, que son los mismos de antes. El primer caso es unaecuacion lineal, que estudiaremos de manera detallada; el segundo es un caso deuna ecuacion no lineal, que en general pueden ser muy complicadas aunque enciertas situaciones es posible efectuar un estudio cualitativo bastante completo.
Por supuesto, los ejemplos anteriores no agotan los posibles modelos de crec-imiento poblacional. La ecuacion logıstica tiene la desventaja de que no incluyeexplıcitamente el valor d; en tal sentido, en otros modelos se prefiere dejar a losmuertos donde estaban y proponer otro mecanismo auto-regulatorio:
N ′(t) = −dN(t) + bN(t− τ)ϕ(N(t− τ)).
El caso ϕ ≡ 1 recupera la ecuacion de Malthus con retardo; en general, sesupone que ϕ se hace mas pequeno a medida que N crece. Por ejemplo, en elmodelo de Nicholson, empleado para describir ciertas poblaciones de insectos,
7

el valor ϕ expresa la probabilidad de supervivencia de una larva, dado por unadistribucion exponencial: ϕ(x) = e−x/N0 . Se obtiene entonces una ecuacion dela forma
N ′(t) = −dN(t) + bN(t− τ)e−γN(t−τ).
Mas en general, podemos considerar ecuaciones o sistemas del tipo
x′(t) = f(t, x(t), x(t− τ)) (1)
en donde τ puede ser constante o una funcion τ(t, x(t)). Tambien existen situa-ciones en las que hay mas de un retardo:
x′(t) = f(t, x(t), x(t− τ1), . . . , x(t− τN )).
Los ejemplos previos son casos de retardos discretos, a diferencia de las ecua-ciones con retardos distribuidos, que contienen terminos que suelen escribirsecomo una convolucion, de la forma∫ t
t−τk(t− s)x(s) ds =
∫ τ
0
k(s)x(t− s) ds,
en donde el nucleo k satisface∫ τ
0k(s) ds = 1. Esta situacion incluye el caso
de retardo no acotado τ = +∞, en el que x′(t) depende de toda la historiax(s) : s ≤ t.
En ocasiones resultara de utilidad escribir la ecuacion en la forma
x′(t) = F (t, xt),
donde F es un operador definido en cierto subconjunto de R × C, para algunespacio C apropiado de funciones continuas y xt denota la funcion definidapor xt(s) := x(t + s). Por ejemplo, la ecuacion (1) se puede escribir comox′(t) = F (t, xt) tomando C = C([−τ, 0],R) y F : R× C → R dada por
F (t, φ) := f(t, φ(0), φ(−τ)).
Pero esta notacion tambien incluye las ecuaciones con retardo distribuido; porejemplo, la ecuacion
x′(t) = −dx(t) +
∫ t
t−τk(t− s)x(s) ds
se puede escribir x′(t) = F (xt), donde F : C([−τ, 0],R)→ R esta dada por
F (φ) := −dφ(0) +
∫ τ
0
k(s)φ(−s) ds.
En algunos casos, tiene interes estudiar tambien ecuaciones o sistemas de ordensuperior. Como motivacion, podemos comenzar considerando la ecuacion delpendulo con friccion
u′′(t) + cu′(t) + a senu(t) = 0,
8

donde a, c > 0, cuyos equilibrios son de la forma u ≡ kπ con k ∈ Z. Observemosque si u es solucion entonces tambien u+ 2π es solucion, de modo que podemoslimitarnos a considerar unicamente las soluciones tales que u(0) ∈ [0, 2π). Comosugiere la intuicion, el equilibrio u ≡ 0 es asintoticamente estable: para unaexplicacion informal, basta observar que si u esta cerca de 0 entonces senu ' u;luego, si λ1, λ2 ∈ C son las raıces de la ecuacion caracterıstica
λ2 + cλ+ a = 0
entonces las soluciones que comienzan cerca del origen verifican
u(t) ' a1eλ1t + a2e
λ2t
si λ1 6= λ2 o bienu(t) ' reλt + steλt
si λ1 = λ2 = λ. Cuando c2 ≥ 4a (es decir, si la friccion es ‘grande’) las raıcesson numeros reales negativos, por lo cual vale u(t)→ 0 para t→ +∞ y el signode u permanece constante a partir de cierto valor de t. En cambio, si c2 < 4a lasraıces son complejas, con parte real −c/2 < 0. Tambien en este caso deduce queu tiende a 0 para t → +∞, aunque lo hace de forma oscilatoria, presentandouna secuencia tn → +∞ de cambios de signo. Esto responde a la imagen mentalque uno puede hacerse del pendulo, que va frenandose y se acerca cada vez masa la posicion de reposo.
La situacion cambia por completo cuando u esta cerca de π: en tal casosenu ' π − u y las soluciones verifican
u(t) ' π + a1eλ1t + a2e
λ2t
donde λ1 6= λ2 ∈ R>0 son ahora las raıces de la ecuacion λ2 + cλ− a = 0. Estomuestra que el equilibrio u ≡ π es inestable y cabe preguntarse, entonces: ¿seraposible agregar a la ecuacion una fuerza externa que lo estabilice?
La idea intuitiva consiste en suponer que estamos cerca del equilibrio, peroel pendulo cae. Entonces lo ‘empujamos’ hacia el lado opuesto al de la caıdapor medio de cierta fuerza que sea proporcional a la distancia al punto deequilibrio. Sin embargo, este proceso no es instantaneo ya que, lentos comosomos, tardamos cierto tiempo τ en ‘reaccionar’. Se obtiene entonces la ecuacion
u′′(t) + cu′(t) + asen(u(t)) = µ(π − u(t− τ)).
Es posible probar que, para cierto µ > 0, el equilibrio u ≡ π se vuelve estable.Pero para comenzar veremos un ejemplo mas sencillo, que permitira mostrar demanera inmediata que el mundo de las ecuaciones con retardo es muy diferenteal de las ecuaciones ordinarias.
Supongamos, como en el caso previo, un problema de ‘control’: se procuraque una cierta cantidad u(t) se mantenga cercana al valor de equilibrio u = 0.Para esto se propone una ecuacion de la forma
u′(t) = c(t),
9

con la estrategia de disminuir el valor de u mientras sea positivo y aumentarloen caso contrario. Por ejemplo, se puede elegir un control c(t) proporcional au(t), vale decir, de la forma c(t) = −αu(t) para cierta constante α > 0. De estamanera, para cualquier valor inicial de u resulta u(t) → 0 para t → +∞. Elvalor α brinda una medida de la velocidad a la que la funcion u se aproxima a0; mas precisamente, u(t) = u(0)e−αt.
Sin embargo, si otra vez estamos lentos de reflejos y la accion llevada a cabopor el termino c tiene un retardo, entonces la situacion es muy diferente. Porejemplo, consideremos α = 1, es decir, la ecuacion
u′(t) = −u(t− τ).
La idea intuitiva es que si reaccionamos rapidamente (es decir, si τ es pequeno),entonces todavıa podemos controlar el valor de u. Pero si por ejemplo τ = −π2 ,entonces resulta que u(t) = sen(t) es solucion, ya que
u′(t) = cos(t) = sen(π
2− t)
= −u(t− π
2
).
Esto da lugar a una primera novedad respecto de las ecuaciones ordinarias deprimer orden: las soluciones de esta ecuacion pueden ser oscilatorias, es decir,tener ceros arbitrariamente grandes. Para τ = 0 esto no puede ocurrir, ya quelas trayectorias no se cruzan y, obviamente, u ≡ 0 es solucion. Una ultima pizcade optimismo podrıa hacernos creer que, de todas formas, todavıa logramoscontrolar la solucion u pues se mantiene acotada; sin embargo, para valoresmayores de τ se obtienen oscilaciones no acotadas: un verdadero descontrol.
3 Ecuacion con retroalimentacion o feedback
El ‘descontrolado’ ejemplo que vimos es un caso particular de la ecuacion confeedback,
u′(t) = −αu(t− τ). (2)
Si bien el planteo previo corresponde al caso α > 0, conocido como feedbacknegativo, tambien tiene sentido considerar el de feedback positivo, es decir,α < 0. Cuando el retardo es nulo, el equilibrio u ≡ 0 es asintoticamente estableen el primer caso, e inestable en el segundo. A partir de ahora supondremosτ > 0.
En la introduccion mencionamos el caso particular α = −1 que, segundijimos, tiene infinitas soluciones de la forma eλt. Mas precisamente, vimosque las raıces de la ecuacion caracterıstica asociada forman una sucesion λncon |λn| → ∞. En consecuencia, cualquier combinacion lineal de la forma∑Nn=1 ane
λnt es solucion y, mas aun, es facil ver que, para algun espacio fun-cional apropiado, tambien es solucion cualquier serie convergente
∑∞n=1 ane
λnt
(¿Como tiene que ser la convergencia? ¿Por que existen series convergentesde esa forma? Ver ejercicio 1 de la proxima seccion). Cabe ahora repetir lapregunta de las primeras paginas: ¿puede haber mas soluciones?
10

Dar una respuesta a esto no parece ya tan sencillo, aunque podemos ganaralgo de tiempo con algo que todavıa no hemos contemplado: la multiplicidad delas raıces caracterısticas. Es claro (¿por que?) que no puede haber raıces conmultiplicidad infinita; ademas, como veremos, si λ es una raız de multiplicidadk entonces cualquier funcion de la forma p(t)eλt, con p un polinomio de gradomenor que k es solucion. Cabe aclarar, de todas formas, que en este caso noes gran cosa lo que se agrega a nuestro surtido de soluciones pues existe a losumo una raız multiple y, en tal caso, su multiplicidad es 2 (mas precisamente,se puede ver que esto ocurre unicamente cuando α = 1
τe , ver ejercicio 4.2). Sipor comodidad suponemos que esta posible raız doble es la primera, entoncestenemos soluciones de la forma
u(t) = ateλ1t +
∞∑n=1
aneλnt.
Ya con cierta impaciencia, preguntamos una vez mas: ¿son estas todas lassoluciones?
Responder esta nueva pregunta es bastante mas complicado y no lo haremosen detalle (para el estudio completo del problema, se puede ver [1]). Pero elplanteo nos ayudara a entender mejor la diferencia con el caso τ = 0. Para unaecuacion lineal de orden n con coeficientes constantes
x(n)(t) + an−1x(n−1)(t) + . . .+ a0x(t) = 0,
la ecuacion caracterıstica tiene n raıces complejas (contadas con su multiplici-dad) y cada raız de multiplicidad k lleva asociado un espacio de soluciones quetiene tambien dimension k. Por otro lado, sabemos que el conjunto de solu-ciones es de dimension n, lo que permite deducir que todas las soluciones sonde la forma
J∑j=1
pj(t)eλjt,
donde λ1, . . . , λJ son las raıces caracterısticas y el polinomio pj es 0 o tienegrado menor que la multiplicidad algebraica de λj . Y todo esto, en definitiva,nos resulta muy razonable pues, para cada condicion inicial
x(0) = x0, x′(0) = x1, . . . , x
(n−1)(0) = xn−1
existe una unica solucion, lo que determina un isomorfismo entre Cn y el espaciode soluciones. Pero para nuestra ecuacion (2) el espacio de soluciones tienedimension infinita, lo que nos lleva a observar que otro tanto debe ocurrir conel espacio de condiciones iniciales y, en consecuencia, la dimension no alcanzapara probar que no hay mas soluciones que las antes mencionadas.
En efecto, resolver un problema de valores iniciales para (2) significa algodiferente que en el caso sin retardo. No basta con prescribir el valor de u en ciertot0: en efecto, para poder obtener una solucion definida en [t0, t0 + δ] debemosconocer su valor en el intervalo [t0 − τ, t0 + δ − τ ]. Lo que se hace, entonces, es
11

tomar como dato inicial una funcion definida en el intervalo [t0−τ, t0]. Podemossuponer que t0 = 0 y que el dato inicial es una funcion continua φ : [−τ, 0]→ R.En tal caso, sobre el intervalo [0, τ ] la ecuacion se reduce, gracias a la condicioninicial, a una ecuacion completamente ordinaria (en mas de un sentido):
u′(t) = −αφ(t− τ).
Tenemos, ademas, la condicion u(0) = φ(0), lo que nos permite obtener demanera unica la solucion
u(t) = φ(0)− α∫ t
0
φ(s− τ) ds.
Observemos que u resulta continua en [−τ, τ) y de clase C1 en (0, τ). Sinembargo, no tiene por que resultar derivable en el 0, a menos que φ lo sea y,ademas, valga φ′(0−) = u′(0+) = −αu(0 − τ) = −αφ(−τ). Esto nos permitecomprender que vamos a entender, en general, por ‘solucion’ de una ecuaciondel tipo x′(t) = f(t, x(t), x(t− τ)): una funcion continua x : [t0− τ, t0 + δ)→ Rque es diferenciable en (t0, t0 + δ) y satisface la ecuacion en dicho intervalo.Por otro lado, la forma de resolver la ecuacion para [τ, 2τ ] nos permite mostraruna particularidad tıpica de las ecuaciones con retardo: en general se puedenresolver hacia adelante, pero no hacia atras. En efecto, si queremos hacer lomismo que antes para t ∈ [−τ − δ,−τ), tiene que valer:
−αu(t) = u′(t+ τ).
Como vale la condicion inicial u = φ en [−τ, 0], debemos pedir en primer lugarque φ sea de clase C1 en [−r, 0], donde r = minδ, τ. De esta forma, se obtienepara t ∈ [−τ − r, τ ]:
u(t) = −φ(t+ τ)
α.
En particular, u(−τ) = −φ(0)α , mientras que, por otro lado, la condicion inicial
dice que u(−τ) = φ(−τ). Esto determina dos condiciones necesarias para queexista solucion:
1. φ ∈ C1([−r, 0]).
2. Condicion de compatibilidad: φ(−τ) = −φ(0)α .
Volviendo a la solucion hacia adelante (forward), el procedimiento anteriorpuede repetirse ahora para el intervalo [τ, 2τ ] y ası sucesivamente, dando lugaral llamado metodo de pasos. Inductivamente, conocida ya la solucion en elintervalo [(n− 1)τ, nτ ] se obtiene, para nτ ≤ t ≤ (n+ 1)τ :
u(t) = u(nτ)− α∫ t
nτ
u(s− τ) ds.
Es facil verificar que u esta definida para todo t ≥ −τ y resulta de clase Cn enel intervalo ((n− 1)τ,+∞). Por ejemplo, para φ ≡ 1 se tiene, para 0 ≤ t ≤ τ :
u′(t) = −α, u(0) = 1,
12

de donde u(t) = 1− αt. Luego, para el intervalo [τ, 2τ ]:
u′(t) = −αu(t− τ) = −α(1− α(t− τ))
y entonces
u(t) = u(τ)− α(t− τ) + α2 (t− τ)2
2
∣∣∣tτ.
Finalmente, observando que u(τ) = 1− ατ , resulta:
u(t) = 1− αt+ α2 (t− τ)2
2.
Inductivamente, se prueba que en el intervalo [(n− 1)τ, nτ ] vale
u(t) =
n∑k=0
(−α)k(t− (k − 1)τ)k
k!.
En efecto, de acuerdo con lo anterior la formula vale para n = 1 y n = 2; sisuponemos que vale para n entonces, para nτ ≤ t ≤ (n+ 1)τ resulta
u′(t) = −αu(t− τ) =
n∑k=0
(−α)k+1 (t− kτ)k
k!
y en consecuencia
u(t) = u(nτ) +
n+1∑k=1
(−α)k(t− (k − 1)τ)k
k!
∣∣∣tnτ.
Pero
u(nτ) =
n∑k=0
(−α)k(nτ − (k − 1)τ)k
k!= 1 +
n+1∑k=1
(−α)k(nτ − (k − 1)τ)k
k!,
lo que prueba que la formula vale en [nτ, (n+ 1)τ ].Respecto de la solucion general para [−τ,+∞), cabe senalar que la formula
obtenida mediante el metodo de pasos no es de gran utilidad para estudiarpropiedades cualitativas de u, razon por la cual conviene encarar un estudiodirecto. A tal fin, comencemos por reescalar convenientemente la ecuacion paraobtener una mas sencilla. Definimos
s := ηt, U(s) := u(t)
y de esta forma resulta
U ′(s) =u′(t)
η= −α
ηu(t− τ) = −α
ηU(η(t− τ)) = −α
ηU(s− ητ).
13

Luego, podemos elegir η = 1τ , β = ατ y la ecuacion se transforma en
U ′(s) = −βU(s− 1).
Para efectuar un analisis detallado de esta ecuacion, consideremos el operadorlineal L : C1(R)→ C(R) dado por
LU(s) := U ′(s) + βU(s− 1).
Siguiendo el procedimiento habitual en la teorıa de ecuaciones ordinarias, cal-culemos ahora
L(eλs) = λeλs + βeλ(s−1) = eλs(λ+ βe−λ).
Igualando a 0 se obtiene la ecuacion caracterıstica que, como anticipamos en laintroduccion, no es una ecuacion polinomial sino trascendente:
h(λ) := λ+ βe−λ = 0.
La relacion entre h y las soluciones de la ecuacion viene dada por el siguienteresultado.
Lema 3.1 Son equivalentes:
1. λ es raız de orden n de h.
2. sjeλs es solucion de la ecuacion para j = 0, . . . , n− 1.
Demostracion:Para k ≤ n− 1 se tiene:
∂k
∂λk
(L(eλs)
)=
∂k
∂λk
(eλsh(λ)
)=
k∑j=0
(kj
)∂jh
∂λj∂k−j
∂λk−j(eλs)
= eλsk∑j=0
(kj
)h(j)(λ)sk−j .
Por otro lado, por linealidad vale
∂k
∂λk
(L(eλs)
)= L
(∂k
∂λk(eλs)
)= L(skeλs)
y entonces
L(skeλs) = 0 ∀k = 0, . . . n− 1⇐⇒ h(j)(λ) = 0 ∀j = 0, . . . n− 1
14

Observacion 3.1 De acuerdo con lo mencionado, si β 6= 1e entonces todas las
raıces son simples, mientras que si β = 1e entonces λ = −1 es la unica raız
multiple y la multiplicidad es exactamente igual a 2. En efecto, λ es una raızmultiple si y solo si h(λ) = h′(λ) = 0, vale decir:
λ+ βe−λ = 0 = 1− βe−λ,
de donde se deduce:λ = −1, βe = 1.
Finalmente, observemos que h′′(λ) = βe−λ 6= 0, de modo que en el ultimo casola multiplicidad es 2. Si β 6= 1
e y φ es de clase C1 entonces se puede probar que,tal como anticipamos, la solucion general toma, para t > 0, la forma
u(t) =
∞∑n=1
aneλnt
en donde los coeficientes an se pueden calcular en forma explıcita.3 Formulasun poco mas complicadas valen para el caso general (ver [1]).
Por otro lado, el siguiente lema se deduce en forma inmediata del hecho de
que e−λ = e−λ.
Lema 3.2 λ es raız de h⇐⇒ λ es raız de h.
Como en la introduccion, el teorema de Picard (y tambien el resultado men-cionado en la Observacion 3.1) garantiza la existencia de infinitas raıces com-plejas de h; sin embargo, para nuestro analisis sera suficiente con observar algomucho mas elemental, que se desprende directamente del hecho de que h es unafuncion analıtica en C y obviamente no constante, por lo cual sus ceros sonaislados y de orden finito. Esto implica que, en cualquier compacto, h tienea lo sumo una cantidad finita de ceros. Pero en realidad se puede probar unresultado mas fuerte:
Lema 3.3 La cantidad de ceros en un conjunto de la forma Re(λ) ≥ a esfinita para todo a ∈ R.
Demostracion:Si λnn∈N es una sucesion de raıces distintas, entonces no se acumulan y
luego |λn| → +∞. Pero
|λn| =∣∣βeλn ∣∣ = |β|e−Re(λn).
Como el termino de la izquierda tiende a infinito, se verifica que Re(λn)→ −∞.En particular, solo una cantidad finita de raıces puede caer dentro del conjuntoRe(z) ≥ a.
3En particular, esto implica que |λn| no se puede ir demasiado rapido a infinito. En general,este tipo de resultados es valido para cualquier funcion analıtica, ver [7].
15

Observemos que las raıces de h no se pueden calcular en general de maneraexplıcita. En efecto, escribiendo λ = x+ iy, se cumple que h(λ) = 0 si y solo si(x, y) es solucion del siguiente sistema de ecuaciones:
x = −βe−xcosyy = βe−xseny.
(3)
Sin embargo, muchas conclusiones sobre el comportamiento de las soluciones denuestra ecuacion diferencial se pueden obtener a partir de cierta informacionmuy basica sobre las raıces de h, que se resume en los proximos resultados. Elprimero de ellos concierne a las raıces reales de h y permitira extraer conclusionesrespecto de la oscilacion de las soluciones.
Proposicion 3.1 Se cumple:
1. Si β < 0, entonces h tiene una unica raız real λ > 0.
2. Si 0 < β < 1e , entonces h tiene exactamente dos raıces reales λ1 < λ2 < 0,
conλ1 → −∞, λ2 → 0−
para β → 0+.
3. Si β = 1e , entonces λ = −1 es la unica raız real de h y tiene multiplicidad
2.
4. Si β > 1e , entonces h no tiene raıces reales.
Demostracion:De acuerdo con lo anterior, λ = x es una raız real si y solo si g(x) = 0, donde
g(x) := x+ βe−x.Para β < 0, se tiene g′(x) = 1 − βe−x > 0; por otro lado, g(0) = β < 0 y
g(x)→ +∞ para x→ +∞. En consecuencia, g tiene una unica raız real x > 0.Para β > 0, podemos escribir la ecuacion g(x) = 0 como ϕ(x) = β, donde
ϕ(x) := −xex. Todas las propiedades se deducen de manera inmediata a partirde un simple estudio de ϕ, cuya grafica tiene esta forma:
16

Con ayuda del siguiente lema, la proposicion previa permitira mostrar que las
soluciones oscilan cuando el retardo es suficientemente grande. La demostracionesta basada en la del texto de Gyori y Ladas [3].
Lema 3.4 Son equivalentes:
i) Toda solucion del problema u′(t) = −αu(t − τ) oscila, es decir, existetn → +∞ tal que u(tn) = 0 para todo n.
ii) La ecuacion caracterıstica λ+ αe−λτ = 0 no tiene soluciones reales.
Demostracion:i)⇒ ii) es trivial, pues si λ es una raız caracterıstica real, entonces u(t) = eλt
es una solucion no oscilatoria. Para probar la afirmacion recıproca, supongamosque la ecuacion caracterıstica no tiene raıces reales, lo que implica α > 0 y,ademas, existe M > 0 tal que λ + αe−λτ ≥ M para todo λ ∈ R. Equivalente-mente,
−λ+ αeλτ ≥M para todo λ ∈ R. (4)
Si u es una solucion que no oscila, reemplazando por −u si hace falta, podemossuponer que existe t0 tal que u(t) > 0 para t > t0. Esta situacion se puedeescribir de la siguiente forma, que evita la referencia explıcita a t0: u(t) > 0para t 0. Consideremos el siguiente conjunto
Λ := λ ≥ 0 : u′(t) + λu(t) ≤ 0 para t 0.
En primer lugar, observemos que 0 ∈ Λ, pues u′(t) = −αu(t− τ) < 0 si t 0;por otra parte, Λ es un intervalo, ya que si λ ∈ Λ y 0 ≤ λ ≤ λ entonces, parat 0,
u′(t) + λu(t) ≤ u′(t) + λu(t) ≤ 0.
Afirmamos que si λ ∈ Λ entonces λ + M ∈ Λ. En efecto, para t 0 se tieneque u′(t) ≤ −λu(t) ≤ 0 y entonces u(t) ≤ u(t− τ) para t 0. Se deduce que
u′(t) + αu(t) ≤ u′(t) + αu(t− τ) = 0,
es decir, α ∈ Λ. Consideremos la funcion φ(t) := eλtu(t), que verifica
φ′(t) = eλt(u′(t) + λu(t)) ≤ 0
para t 0. Ademas,
u′(t) + (λ+M)u(t) = −αu(t− τ) + (λ+M)u(t)
= −αe−λ(t−τ)φ(t− τ) + (λ+M)e−λtφ(t) ≤ e−λtφ(t)(−αeλτ + λ+M
)para t 0, pues φ es decreciente. Usando (4) se deduce que
u′(t) + (λ+M)u(t) ≤ 0,
17

es decir: λ+M ∈ Λ.Lo anterior implica que Λ = [0,+∞). Por otra parte, veremos que existe al
menos un valor positivo λ /∈ Λ, lo que es absurdo. Este ultimo resultado es deutilidad en otras situaciones un poco mas generales, ası que lo probamos a con-tinuacion en la forma de un nuevo lema, con el que se completa la demostracion.
Lema 3.5 Sean α, τ > 0 y u tales que u(t) > 0 y u′(t) ≤ −αu(t − τ) para
t 0. Sean Λ como antes y C :=(
2ατ
)2. Entonces
u(t) ≤ u(t− τ) < Cu(t)
para t 0 y λ0 /∈ Λ, donde
λ0 :=1
τlnC > 0.
Demostracion:Integrando entre t y t+ τ
2 obtenemos, para t 0,
0 ≥∫ t+ τ
2
t
[u′(s) + αu(s− τ)] ds = u(t+
τ
2
)− u(t) + α
∫ t− τ2
t−τu(s) ds.
Como u decrece para s 0, se deduce que
u(t+
τ
2
)− u(t) +
ατ
2u(t− τ
2
)≤ 0
y luegoατ
2u(t− τ
2
)< u(t).
De la misma forma se ve que
ατ
2u (t− τ) < u
(t− τ
2
),
lo que prueba que u(t − τ) < Cu(t). Como u es decreciente, vale tambien queu(t) ≤ u(t− τ), lo que a su vez implica que C > 1 y luego λ0 > 0. Supongamosahora que λ0 ∈ Λ, es decir, u′(t) + λu(t) ≤ 0 para t 0. Entonces φ(t) :=eλ0tu(t) verifica φ′(t) = eλ0t(u′(t) + λ0u(t)) ≤ 0 y, en consecuencia,
φ(t− τ) ≥ φ(t)
para t 0. Luegou(t− τ) ≥ eλ0τu(t) = Cu(t),
lo que es absurdo.
18

De lo anterior se deduce:
Toda solucion de (2) oscila ⇐⇒ τα > 1e .
Continuando con el analisis de la ecuacion con feedback (2), obtendremosahora informacion sobre la estabilidad de la solucion nula, a partir de un analisismas profundo de las raıces de h. Por conveniencia, introducimos el cambio devariables
s :=t
τ, β := ατ, U(s) := u(t),
de modo que la ecuacion para U resulta
U ′(s) = −βU(s− 1),
y la funcion caracterıstica es
h(λ) = λ+ βe−λ.
Como vimos, para cualquier a ∈ R la funcion h tiene finitos ceros en el conjunto
λ ∈ C : Re(λ) ≥ a;
ademas, λ es raız si y solo si λ es raız. Escribiendo λ = x + iy, las raıces seobtienen resolviendo el sistema de ecuaciones (3) antes mencionado. El siguienteresultado caracteriza los valores de β para los cuales existen raıces con partereal negativa. Como vimos, si β < 0 hay siempre una raız real positiva, de modoque nos limitaremos a considerar ahora el caso β > 0.
Proposicion 3.2 Se cumple:
1. Si 0 < β < π2 , entonces existe µ > 0 tal que Re(λ) ≤ −µ para toda raız λ.
2. Si β = π2 , entonces λ = ±iπ2 son raıces simples y todas las raıces restantes
tienen parte real negativa.
3. Si β > π2 , entonces existe alguna raız λ tal que Re(λ) > 0, π2 < Im(λ) < π.
Demostracion:Supongamos que λ = x + iy es raız caracterıstica, luego se satisface (3), es
decir:
x = −βe−xcosy, y = βe−xseny.
Como λ tambien es raız, podemos suponer, ademas, que y ≥ 0. Si x ≥ 0,entonces (por ser β > 0) vale y 6= 0 y entonces cosy ≤ 0 < seny. Se deduce quey pertenece al segundo cuadrante, es decir
y ∈ S :=
∞⋃n=0
[2nπ +
π
2, (2n+ 1)π
).
19

Ademas, para f(y) := senyy se cumple
f ′(y) =ycosy − seny
y2< 0
para todo y ∈ S, de modo que f |S alcanza un maximo local en el extremoizquierdo de cada intervalo de S. Observemos, ademas, que
sen(2nπ + π
2
)2nπ + π
2
=1
2nπ + π2
,
de donde se deduce queseny
y<
2
π
para todo y ∈ S \ π2 . Finalmente, a partir de la igualdad
seny
y=ex
β,
concluimos que1
β≤ ex
β≤ 2
π
y en consecuencia β ≥ π2 . En particular, para 0 < β < π
2 todas las raıces tienenparte real negativa; ademas, como su cantidad es finita en cualquier conjuntode la forma λ : Re(λ) ≥ a, existe µ > 0 tal que Re(λ) ≤ −µ para toda raızλ. Cuando β = π
2 , los anteriores calculos implican que x = 0, y = π2 ; luego, las
unicas raıces con parte real no negativa son ±iπ2 , que son claramente simples.Para concluir, veamos que para β > π
2 existe una solucion de (3) tal que
x > 0,π
2< y < π.
En efecto, dividiendo ambas ecuaciones se obtiene x = g(y) := −y cosyseny . Ob-
servemos que g′(y) > 0 en(π2 , π
)y vale g(π2 ) = 0, g(π−) = +∞; luego, para
cada valor de y en dicho intervalo queda determinado en forma unica un valorx = x(y) > 0 tal que λ = x+ iy es una raız correspondiente al valor β = ex y
seny .
Como x es una funcion creciente en(π2 , π
), es facil ver que β tambien lo es,
con β(π2
+)
= π2 , β(π−) = +∞. En consecuencia, para cada valor β > π
2 se
determina en forma unica un valor y ∈(π2 , π
)y una raız caracterıstica λ como
antes.
A modo de corolario de las proposiciones 3.1 y 3.2, obtenemos:
Teorema 3.1 Se cumple:
1. Si α < 0 o si α > π2τ , entonces el equilibrio u ≡ 0 en (2) es inestable.
20

2. Si 0 < α < π2τ , entonces el equilibrio u ≡ 0 en (2) es (globalmente)
asintoticamente estable.
Demostracion:En el primer caso, hay una solucion real de la forma u(t) = extcosyt con
x > 0, y ≥ 0, lo que muestra que 0 es un equilibrio inestable.En el segundo caso, todas las raıces caracterısticas tienen parte real menor
que una constante −c < 0; como veremos mas adelante (Teorema 5.1), estoimplica que el equilibrio u ≡ 0 es un atractor global.
Observacion 3.2 La estabilidad asintotica resulta intuitivamente clara si acep-tamos como valido el hecho (que, por otra parte, es valido) de que ‘a grandesrasgos’, las soluciones son de la forma
u(t) = (at+ b)e−tτ +
∞∑n=1
aneλnt,
en donde el primer termino puede ser no nulo unicamente en el caso ατ = 1e .
En efecto, para tales soluciones tenemos que
|u(t)| ≤ |at+ b|e− tτ +
∞∑n=1
|an|eRe(λn)t ≤ e−γt (|a|t+D)
donde D := |b|+∑∞n=1 |an| y γ := minc, 1
τ , lo que prueba que u(t) → 0 parat→ +∞.
El teorema previo dice, en otras palabras, que el valor τ∗ = π2α es un retardo
crıtico: para τ < τ∗ las soluciones se comportan asintoticamente de manerasimilar al caso sin retardo, pero el equilibrio u ≡ 0 se hace inestable cuandoτ > τ∗.
Es interesante observar que para 1αe < τ < π
2α las soluciones se mantienenestables pero son oscilatorias. Esto se debe a que en la raız doble λ = −1, queexiste para β = 1
e , se produce una bifurcacion y comienzan a aparecer raıcescomplejas conjugadas, con parte real todavıa negativa mientras β < π
2 . Masprecisamente,
Lema 3.6 Dado β ∈(
1e ,
π2
), existen λ = x ± iy raıces tales que −1 < x < 0,
0 < y < π2 .
Demostracion:Como β > 1
e , sabemos que h no tiene raıces reales, de modo que el sistema(3) equivale a
x = −y cosyseny
βe−x =√x2 + y2.
Como en el lema anterior, se verifica que la funcion g(y) := −y cosyseny crece estric-
tamente en(0, π2
)y vale g(0+) = −1, g(π2
−) = 0. Esto implica que para todo
21

valor x ∈ (−1, 0) la ecuacion g(y) = x tiene exactamente una solucion y := ξ(x),donde ξ es una funcion positiva y creciente tal que ξ(−1+) = 0, ξ(0−) = π
2 . Estodetermina de forma unica el valor
β = β(x) = ex√x2 + ξ(x)2.
Es inmediato verificar que β es creciente, β(−1+) = 1e , β(0−) = π
2 ; en otraspalabras, para cada valor de β en el intervalo
(1e ,
π2
)obtenemos de manera
unica un valor x ∈ (−1, 0) y un valor y = ξ(x) ∈(0, π2
).
Observacion 3.3 De la demostracion anterior se deduce que existen dos ramasde raıces λ(β) := x(β)± iy(β) tales que λ( 1
e ) = −1, λ(π2 ) = ±iπ2 .
4 Ecuaciones lineales de primer orden con coe-ficientes constantes
Un poco mas en general, consideremos ahora la ecuacion lineal con coeficientesconstantes
u′(t) = au(t) + bu(t− τ) (5)
para a, b ∈ R, τ > 0. Como antes, se obtiene la ecuacion caracterıstica h(λ) = 0,donde
h(λ) := λ− a− be−λτ .Haciendo el reemplazo
z := τλ, α := aτ, β := bτ,
dicha ecuacion es equivalente a
F (z, α, β) := z − α− βe−z = 0.
Escribiendo z = x + iy, tales raıces quedan determinadas como las solucionesdel sistema de ecuaciones
x = α+ βe−xcosyy = −βe−xseny.
(6)
Como antes, podemos limitarnos a considerar y ≥ 0. En primer lugar, veamoscuales son las raıces con parte real nula, es decir, con x = 0. Cuando y = 0,se tiene que z = 0 es solucion si y solo si α + β = 0. En cambio, para y > 0sabemos que z = ±iy es raız si y solo si
y = −βseny, α = −βcosy.
Esto dice que y no puede ser un multiplo de π; mas aun, para cada y 6= kπ conk ∈ N0 queda determinado un unico par (α, β) dado por
α =y cosy
seny, β =
−yseny
.
22

Esto permite definir curvas suaves en el plano (α, β), dadas por
Ck := (α(y), β(y)) : y ∈ (kπ, (k + 1)π).
Estas curvas son todas disjuntas y sin autointersecciones, pues si (α(y), β(y)) =(α(y), β(y)) para ciertos y ∈ (kπ, (k + 1)π), y ∈ (kπ, (k + 1)π), se deduce quecosy = cosy, lo cual da lugar a dos posibles situaciones:
• y = y+2nπ para algun n ∈ Z, en cuyo caso seny = seny. En consecuencia,
y = −β(y)seny = −β(y)seny = y.
• y = −y + 2nπ para algun n ∈ Z. En este caso seny = −seny, de modoque, razonando como antes, se deduce que y = −y, lo que es absurdo.
Notemos, ademas, que C0 se puede extender en forma continua incluyendoel valor y = 0, de modo que se encuentra con la recta α + β = 0 en el punto(1,−1). Por otra parte, para 0 < y < π se cumple que α′(y), β′(y) < 0, de modoque tanto α como β decrecen y, ademas, es inmediato ver que tienden a −∞ amedida que y → π−. Finalmente, observemos que la curva se mete en el primercuadrante por el punto (0,−π2 ) y se acerca asintoticamente a la recta α = β,siempre por debajo de ella. En efecto, basta notar que
α(y)− β(y) =y(1 + cosy)
seny> 0
para y ∈ (0, π) y, por otro lado,
limy→π−
y(1 + cosy)
seny= limy→π−
y seny
1− cosy= 0.
Llamemos R a la region no acotada que queda debajo de recta α + β = 0 yarriba de C0, es decir, esa especie de ‘triangulo infinito’ que queda determinadoen la siguiente figura.
23

Es facil ver que las restantes curvas Ck con k > 0 no tocan la region R: porejemplo, basta con un argumento de continuidad, pues resulta claro que no secortan con ∂R y, ademas, poniendo y = 2k+1
2 π se obtiene el valor
(α, β) =
(0, (−1)k+1 2k + 1
2π
)∈ Ck \R.4.
Nuestro objetivo (o, mejor dicho, uno de ellos) es probar que si (α, β) ∈ R,entonces el origen es un equilibrio estable. A tal fin, para cada (α, β) fijo,consideremos el numero N ∈ N0 dado por
N(α, β) = #z ∈ C raız caracterıstica : Re(z) > 0
en donde las raıces se cuentan con su multiplicidad.
Lema 4.1 N(α, β) = 0 para todo (α, β) ∈ R.
Demostracion:Veamos en primer lugar que N es localmente constante (y, en consecuencia,
constante) sobre R. En efecto, consideremos (α, β) ∈ R y una bola B ⊂ R deradio r centrada en (α, β). Si z = x + iy es una raız correspondiente a algun(α, β) ∈ B con x ≥ 0 entonces x > 0 pues, por definicion, para (α, β) ∈ R nohay raıces imaginarias puras. Empleando (6) se obtiene:
0 < x < |α|+ |β| < |α|+ |β|+ 2r, |y| < |β| < |β|+ r,
4Mas precisamente, se ve que Ck queda contenida arriba del eje α y a la derecha de larecta α+ β = 0 para k impar, y en el ’triangulo infinito’ inferior para k par. Ver ejercicio 5
24

Luego, si Γ es el rectangulo
Γ := x+ iy : 0 < x < |α|+ |β|+ 2r, |y| < |β|+ r,
se deduce que, para cualquier elemento de B, todas las posibles raıces carac-terısticas con parte real positiva caen en Γ y, por otra parte, Γ no contiene otrasraıces caracterısticas. En particular, vale
θ := minz∈∂Γ
|F (z, α, β)| > 0.
Achicando ahora el radio de B tanto como haga falta y usando la continuidaduniforme de F en ∂Γ×B, podemos suponer que
|F (z, α, β)− F (z, α, β)| < θ
para todo (z, α, β) ∈ ∂Γ×B. Para simplificar un poco la vida (en este momentonada sencilla) del lector, llamemos
f(z) := F (z, α, β), f(z) := F (z, α, β).
Como θ es el mınimo, resulta θ ≤ |f(z)| y la desigualdad anterior implica que
|f(z)− f(z)| < |f(z)| para todo z ∈ ∂Γ.
Luego, por el teorema de Rouche (¡quien lo hubiera dicho!), se deduce que fy f tienen, en Γ, la misma cantidad de raıces. En otras palabras, todos loselementos de B tienen la misma cantidad de raıces con parte real positiva. Estoprueba que N |R es constante.
Finalmente, observemos que (−1, 0) ∈ R y F (z,−1, 0) = z+ 1, de modo quela unica raız es z = −1. Concluimos entonces que N ≡ 0 sobre R, es decir: para(α, β) ∈ R todas las raıces caracterısticas tienen parte real negativa.
La misma idea previa sirve para mostrar que, en realidad, el valor N(α, β) es
constante sobre cada componente conexa del complemento, en el plano (α, β),del conjunto
α+ β = 0 ∪∞⋃k=0
Ck.
A partir de esto se puede probar que si (α, β) /∈ R entonces hay alguna raızcaracterıstica con parte real positiva:
Lema 4.2 N(α, β) > 0 para todo (α, β) /∈ R.
Demostracion:Es facil (ver ejercicio 6) verificar que hay una raız real positiva cuando α+β >
0 y β ≥ 0. En consecuencia, como la region α + β > 0 ≥ β no se intersecacon las curvas Ck, se deduce que para α + β > 0 existe al menos una raız conparte real positiva. Por otra parte, para la region contenida bajo C0 y la recta
25

α+β = 0 podemos proceder de la siguiente forma. En primer lugar, si −eα−1 <β < −α ≤ −1, es inmediato verificar que existen dos raıces reales positivas,pues la funcion ϕ(x) := x − βe−x alcanza su mınimo en xmin = ln(−β) > 0 yvale
ϕ(xmin) = ln(−β) + 1 < α,
mientras queϕ(0) = −β > α, ϕ(+∞) = +∞.
Como ϕ es convexa, se deduce que la ecuacion ϕ(x) = α tiene exactamentedos soluciones reales positivas. Por otra parte, todas las curvas Ck con k parcruzan el grafico de la funcion β = −eα−1, de modo que para todo (α, β) que seencuentre entre dos de tales curvas hay por lo menos dos raıces con parte realpositiva. Finalmente, observemos que si (α, β) ∈ Ck con k par entonces hay porlo menos una raız con parte real positiva. Para ver esto, consideremos αn → αde manera tal que (αn, β) /∈ Ck y luego podemos suponer que existen zn 6= znraıces caracterısticas correspondientes a (αn, β) con parte real positiva. Demanera analoga a los calculos de lema previo, sabemos que las sucesiones zny zn estan acotadas, ası que podemos suponer que convergen respectivamentea ciertos z, z. Si alguno de estos valores tiene parte real positiva, queda probadolo que querıamos, ası que a partir de ahora podemos suponer que z y z tienenparte real nula. Como ademas son raıces caracterısticas para (α, β), se deduceque z = z = iy para cierto y ∈ (kπ, (k + 1)π). Por otra parte, observemosque ∂F
∂z (iy, α, β) = 1 + βe−iy 6= 0; luego, por el teorema de la funcion implıcitaexisten abiertos U ⊂ R,V ⊂ C con α ∈ U , iy ∈ V y una unica funcion z : U → Vde manera tal que z(α) = iy, F (z(α), a, β) = 0 para α ∈ U . Esto dice, para ngrande, que zn = zn, lo que es absurdo.5
Lo anterior permite obtener conclusiones respecto de la estabilidad en elorigen. Observemos que para a+ b = 0 se tiene que λ = 0 es raız caracterısticay cualquier constante es un punto de equilibrio, de modo que supondremosa+ b 6= 0. En tal caso, sabemos que hay inestabilidad cuando (α, β) /∈ R. Estoocurre siempre para α+β > 0, es decir, a+b > 0; en cambio, la region que quedadebajo de la recta α + β = 0 y encima de la recta α = β (incluyendola) estacontenida en R y para esos valores hay estabilidad asintotica. Esta situacioncorresponde al caso a + b < 0 y b ≥ a. Finalmente, cuando a + b < 0 y b < a,sigue habiendo estabilidad asintotica mientras (α, β) se mantenga estrictamentepor encima de C0. Como (α, β) = τ(a, b) y ademas 0 ∈ R, se ve que (α, β) ∈ Rpara valores pequenos de τ , y (α, β) /∈ R cuando τ es grande. Observemos,ademas, que para 0 < y < π vale α′(y) < β′(y), lo que dice que la semirrectaτ(a, b) : τ > 0 no puede cortar la curva C0 mas de una vez: en consecuencia,existe un unico valor τ∗ para el cual (α, β) ∈ C0 y, al igual que en el modelocon feedback negativo antes analizado (que corresponde al caso a = 0, b < 0),se deduce que u ≡ 0 es asintoticamente estable para 0 < τ < τ∗ e inestablepara τ > τ∗. Se verifica facilmente que τ∗ se hace mas grande a medida que ase acerca al valor b. Resumiendo,
5Mas precisamente, puede probarse que entre las curvas C2n y C2n+2 el numero de raıcescon parte real positiva es exactamente 2n+ 2 (para mas detalles, ver [8]).
26

Teorema 4.1 Para la ecuacion (5), se cumple:
1. Si a+ b > 0, el equilibrio u ≡ 0 es inestable.
2. Si a+ b < 0 y b ≥ a, el equilibrio u ≡ 0 es asintoticamente estable.
3. Si a+ b < 0 y b < a, existe un valor τ∗ > 0 tal que el equilibrio u ≡ 0 esasintoticamente estable para τ < τ∗ e inestable para τ > τ∗.
4.1 Ejercicios
Para la ecuacion lineal (5) consideramos la ecuacion caracterıstica h(λ) = 0 ydefinimos, como antes:
z := τλ, α := τa, β := τb
F (z, α, β) := h(λ) = z − α− βe−z,
1. Probar que si λn son raıces de h y∑∞n=1 |an| < ∞ entonces la serie∑∞
n=1 aneλnt converge uniformemente en [−τ,+∞) a una solucion de (5).
2. Calcular todas las posibles raıces multiples para α, β fijos y verificar que,en tal caso, la multiplicidad es 2.
3. Para α, β fijos, verificar que:
(a) Si β ≥ 0 hay una unica raız real, que resulta positiva cuando α+β > 0y negativa cuando α+ β < 0.
(b) No hay raıces reales si y solo si β < −eα−1.
(c) Si eα−1 ≤ β ≤ −1 entonces hay al menos una raız real positiva.
4. Mostrar que si z0 es una raız simple para ciertos (α0, β0) entonces existen Uentorno de (α0, β0), V entorno de z0 y una unica funcion suave z : U → Vtal que z(α, β) es raız caracterıstica para todo (α, β) ∈ U .
5. Graficar en el plano (α, β) las curvas
Ck := (α(y), β(y)) : y ∈ (kπ, (k + 1)π) k ∈ N0
donde
α(y) =y cosy
seny, β(y) =
−yseny
.
6. Probar que α + β > 0 entonces hay al menos una raız con parte realpositiva y lo mismo ocurre para α + β < 0 cuando (α, β) se encuentraentre C2n y C2n+2. Se puede probar que el numero exacto es 2n + 2.Deducir que sobre C2n con n > 0 tambien existe al menos una raız conparte real positiva (sugerencia: usar el ejercicio 4).
7. Sean a, b tales que a+ b < 0, b < a. Calcular explıcitamente el valor τ∗.
8. Interpretar los resultados obtenidos para el caso particular a = 0.
27

5 Linealizacion
En la seccion previa analizamos la estabilidad del origen para la ecuacion linealu′(t) = au(t) + bu(t− τ). Una pregunta natural para quien conozca los metodosempleados en la teorıa de ecuaciones ordinarias es si dicho analisis puede ser deutilidad para estudiar la estabilidad de los equilibrios de algunas ecuaciones nolineales, por ejemplo:
u′(t) = F (u(t), u(t− τ)).
En este caso, se llama punto de equilibrio a una solucion constante u = u∗,es decir, tal que (u∗, u∗) es un cero de F . Suponiendo que F : R2 → R esdiferenciable en dicho punto, podemos escribir la ecuacion anterior como
u′(t) =∂F
∂x(u∗, u∗)(u(t)− u∗) +
∂F
∂y(u∗, u∗)(u(t− τ)− u∗) +R(u(t), u(t− τ))
donde R es el resto de Taylor. En otras palabras, si definimos v(t) := u(t)−u∗,(a, b) := ∇F (u∗, u∗) y ϕ(x, y) := R(x+ u∗, y + u∗) nos queda la ecuacion
v′(t) = av(t) + bv(t− τ) + ϕ(v(t), v(t− τ)),
que puede pensarse como una ‘perturbacion’ de una ecuacion lineal con coe-ficientes constantes, en el sentido de que cerca del origen la funcion ϕ tomavalores muy chicos, mas precisamente:
lim(x,y)→(0,0)
ϕ(x, y)
‖(x, y)‖= 0.
En consecuencia, es esperable que las soluciones que se encuentran cercanas al0 se comporten de manera similar a las de la ecuacion linealizada, dada porv′(t) = av(t) + bv(t−τ).
Veremos que, a grandes rasgos, esto es cierto. Para ello, sera convenientebuscar una formula general para expresar la solucion de una ecuacion linealpara cualquier condicion inicial dada. Concretamente, lo que necesitamos esuna formula analoga a la de variacion de parametros para la ecuacion lineal nohomogenea:
u′(t) = au(t) + bu(t− τ) + f(t) t > 0 (7)
con condicion inicialu(t) = φ(t) − τ ≤ t ≤ 0. (8)
En primer lugar, observemos que si φ ∈ C([−τ, 0]) y f ∈ C([0,+∞)), entoncesel metodo de pasos proporciona una solucion globalmente definida, es decir,u ∈ C([−τ,+∞): en efecto, si u es solucion en [−τ, nτ ] para cierto n ∈ N,entonces por la teorıa clasica de ecuaciones ordinarias podemos extender u haciala derecha buscando la unica solucion del problema
v′(t) = av(t) + bu(t− τ) + f(t), v(nτ) = u(nτ)
28

que esta definida hasta (n+ 1)τ . Ademas, escribiendo para t > 0
u(t) = φ(0) +
∫ t
0
[au(s) + bu(s− τ) + f(s)] ds
resulta
|u(t)| ≤ |φ(0)|+∫ t
0
|f(s)| ds+
∫ t
0
|au(s)| ds+
∫ t−τ
−τ|bu(s)| ds
≤ |φ(0)|+∫ t
0
|f(s)| ds+
∫ 0
−τ|bφ(s)| ds+
∫ t
0
(|a|+ |b|)|u(s)| ds,
pues∫ tt−τ |bu(s)| ds ≥ 0. Si llamamos
R(t) :=
∫ t
0
|f(s)| ds+ ‖φ‖∞(1 + τ |b|),
entonces, para cada t fijo y t ≤ t vale R(t) ≤ R(t) y
|u(t)| ≤ R(t) +
∫ t
0
(|a|+ |b|)|u(s)| ds.
Por el Lema de Gronwall6, se deduce que
|u(t)| ≤ R(t)e(|a|+|b|)t
para todo t ≤ t y, en definitiva:
|u(t)| ≤ R(t)e(|a|+|b|)t.
Por conveniencia, denotemos u(t, φ, f) a la solucion correspondiente a cada φ ycada f ; luego, la desigualdad anterior se escribe de la siguiente forma:
|u(t, φ, f)| ≤(∫ t
0
|f(s)| ds+ ‖φ‖∞(1 + τ |b|))e(|a|+|b|)t. (9)
Por otra parte, por linealidad se deduce ademas que
u(t, φ, f) = u(t, φ, 0) + u(t, 0, f),
lo que dara lugar a la formula de variacion de parametros.
Observacion 5.1 Es interesante notar que, para t fijo, podemos definir lasaplicaciones lineales S : C([−τ, 0])→ R y T : C([0, t])→ R dadas por
S(φ) := u(t, φ, 0), T (f) := u(t, 0, f)
6Se puede usar directamente la version mas general del lema, ver ejercicio 2b del apendice
29

Por la desigualdad anterior se tiene que
|S(φ)| ≤ C‖φ‖∞, |T (f)| ≤ D‖f‖∞
para C = (1 + τ |b|)e(|a|+|b|)t y D = te(|a|+|b|)t, de modo que S y T resultancontinuas. Por el teorema de Riesz, existen representaciones integrales de laforma
S(φ) =
∫ t
0
φdλ, T (f) =
∫ t
0
f dµ
para ciertas medidas λ y µ. Esto, de alguna forma, anticipa los resultados quese obtendran a continuacion.
En lo que sigue, veremos una manera explıcita de encontrar una expresion in-tegral para la solucion general u(t, φ, f) con ayuda de una herramienta de granutilidad: la transformada de Laplace. A tal fin, recordemos (al menos en elsentido del mito platonico) algunas propiedades fundamentales de dicha trans-formada.
Para f : [0,+∞) localmente integrable tal que |f(t)| ≤ AeBt para ciertasconstantes A,B ≥ 0 se define
L(f)(z) :=
∫ +∞
0
e−ztf(t) dt.
Es claro que Lf se encuentra bien definida y resulta una funcion analıtica en elconjunto Re(z) > B. Por otra parte, para la convolucion de dos funciones fy g, definida como
f ∗ g(t) :=
∫ t
0
f(t− s)g(s) ds
es inmediato verificar que vale
L(f ∗ g) = L(f)L(g).
Ademas, se tiene el teorema de inversion, valido para una funcion f como antes,asumiendo que tiene localmente variacion acotada:∫
(C)
L(f)(z)ezt dz =f(t+) + f(t−)
2t > 0
para todo C > B, donde∫(C)
ϕ(z) dz := limT→+∞
1
2π
∫ C+iT
C−iTϕ(z) dz.
Lo anterior brinda una expresion explıcita para la antitransformada L−1, quepor ahora vamos a emplear informalmente.
30

Supongamos que f tiene crecimiento exponencial, entonces lo mismo ocurrecon la solucion u (¿por que?). En consecuencia, podemos transformar ambosmiembros de la ecuacion (7) y, por la linealidad de L, vale
L(u′) = aL(u) + bL(u−τ ) + L(f)
donde u−τ (t) := u(t − τ). Es facil verificar la siguiente propiedad de la trans-formada:
L(u′)(z) = zL(u)(z)− u(0).
Luego, la igualdad anterior se escribe
(z − a)L(u)(z) = φ(0) + b
(∫ τ
0
e−ztφ−τ (t) dt+
∫ +∞
τ
e−ztu−τ (t) dt
)+ L(f)(z)
= φ(0) + b
(∫ τ
0
e−ztφ−τ (t) dt+
∫ +∞
0
e−z(t+τ)u(t) dt
)+ L(f)(z)
= φ(0) + b
(∫ τ
0
e−ztφ−τ (t) dt+ e−zτL(u)(z)
)+ L(f)(z),
es decir:(z − a− be−zτ
)L(u)(z) = φ(0) + b
∫ τ
0
e−ztφ−τ (t) dt+ L(f)(z).
No es casualidad que el factor del termino de la izquierda sea exactamente lafuncion caracterıstica h(z) = z − a − be−zτ ; por otra parte, si extendemos φ ala derecha de 0 en forma nula, la igualdad anterior se puede escribir
L(u)(z) =1
h(z)(φ(0) + L(bφ−τ + f)(z)) .
Luego, si logramos calcular la antitransformada de 1h , es decir, una funcion K
tal que L(K) = 1h , resultara
L(u) = φ(0)L(K) + L(K)L(bφ−τ + f) = L(φ(0)K) + L[K ∗ (bφ−τ + f)],
es decir:u = φ(0)K +K ∗ (bφ−τ + f).
La funcion K se llama solucion fundamental de la ecuacion; en particular,poniendo f = 0 y φ = 0 obtenemos
u(t, φ, 0) = φ(0)K(t) + bK ∗ φ−τ (t)
u(t, 0, f) = K ∗ f(t)
respectivamente. Por tal motivo, conviene escribir la anterior descomposicionen la forma
u(t) = φ(0)K(t) + bK ∗ φ−τ (t) +K ∗ f(t), (10)
31

donde el ultimo termino es una solucion particular de la ecuacion y los dosprimeros describen (variando el valor de φ) la totalidad de las soluciones de laecuacion homogenea.
A fin de calcular K, veamos primero que ecuacion debe cumplir. Por em-pezar, observemos que a partir de la igualdad
u(t, φ, 0) = φ(0)K(t) + bK ∗ φ−τ (t),
si tomamos por ejemplo
φn(t) :=
0 si − 1 ≤ t ≤ − 1
nnt+ 1 si − 1
n < t ≤ 0
es “razonable” pensar que u(t, φn, 0) → K(t) para n → ∞ y en consecuenciaK tiene que ser una “solucion” del problema homogeneo con condicion inicial(discontinua)
φ(t) =
0 si t < 01 si t = 0.
Para sustentar un poco mas esta intuicion, cabe observar que si consideramosahora
u(t) := u(t, 0, f) = K ∗ f(t) =
∫ t
0
K(t− s)f(s) ds
y derivamos para t > 0 obtenemos
au(t) + bu(t− τ) + f(t) = K(0)f(t) +
∫ t
0
K ′(t− s)f(s) ds. (11)
Pero
u(t− τ) = K ∗ f(t− τ) =
∫ t−τ
0
K(t− τ − s)f(s) ds
y asumiendo que K(s) = 0 para s < 0 resulta∫ t−τ
0
K(t− τ − s)f(s) ds =
∫ t
0
K−τ (t− s)f(s) ds = K−τ ∗ f(t).
En consecuencia, a partir de (11) y asumiendo K(0) = 1 se deduce
(aK + bK−τ ) ∗ f = K ′ ∗ f,
para toda f , de donde K ′ = aK + bK−τ .A pesar de que φ es discontinua, el metodo de pasos permite obtener K como
funcion definida en [−τ,+∞) con K(t) = 0 para t < 0. Mas aun, la formula (9)antes obtenida muestra que K tiene crecimiento exponencial, mas precisamente
|K(t)| ≤ (1 + τb)e(|a|+|b|)t (12)
32

y en consecuencia L(K) esta bien definida.7
Observemos que efectivamente L(K) = 1h , pues a partir de la ecuacion
K ′(t) = aK(t) + bK(t− τ) t > 0
podemos transformar de ambos lados para obtener, como antes:
zL(K)(z)−K(0) = aL(K)(z) + be−zτL(K)(z)
pues K ≡ 0 en [−1, 0). Esto dice que
(z − a− be−zτ )L(K) = K(0) = 1
y en consecuencia L(K) = 1h .
La formula obtenida permite demostrar el resultado que quedo pendienteen las secciones previas, que asegura estabilidad asintotica del equilibrio parala ecuacion homogenea cuando todas las raıces caracterısticas tienen parte realnegativa. Mas en general, se tiene:
Teorema 5.1 Sea µ > µ0 := supRe(λ) : h(λ) = 0.8 Entonces existe ρ =ρ(a, b) tal que
|u(t, φ, 0)| ≤ ρ‖φ‖∞eµt
para todo t > 0.
Demostracion:De acuerdo con la formula de inversion y por (12), sabemos que para C >
|a|+ |b| y t > 0 vale
K(t) =
∫(C)
L(K)(z)ezt dz =
∫(C)
ezt
h(z)dz.
Veamos en primer lugar que tambien vale
K(t) =
∫(µ)
ezt
h(z)dz.
En efecto, si µ ≥ C no hay nada que probar, mientras que si µ < C podemosconsiderar el rectangulo R con vertices en los puntos µ ± iT , C ± iT . Como hno se anula en R, vale ∫
∂R
ezt
h(z)dz = 0,
7Esto tambien puede verse en forma directa, pues K(t) = eat para t ∈ [0, τ ], luego en[τ, 2τ ] vale
K′(t) = aK(t) + bea(t−τ), K(τ) = eaτ
y se deduce que K(t) = (1 + tbe−aτ )eat, etc.8Que en realidad es un maximo.
33

de modo que alcanza con probar que
limT→+∞
∫γ±
ezt
h(z)dz = 0
donde γ±(s) := s± iT para µ ≤ s ≤ C. Notemos que para z = s± iT vale
|h(z)| ≥ |Im(h(z))| = |T − be−sτ sen(Tτ)| > T
2
para T mayor que un cierto T0, mientras que
|ezt| = ets ≤ eCt
y, de esta forma, ∣∣∣∣∫γ±
ezt
h(z)dz
∣∣∣∣ ≤ 2
TeCt(C − µ)→ 0.
Ademas, para
f(z) :=1
h(z)− 1
z − µ0=a+ be−zτ − µ0
h(z)(z − µ0)
se cumple, si T > T0:
|f(µ± iT )| ≤ 2
T 2
∣∣a− µ0 + be−µτcos(Tτ)∓ ibe−µτ sen(Tτ)∣∣ ≤ D
T 2
para cierta constante D. Esto implica∣∣∣∣∣∫ µ+iT
µ−iTf(z) dz
∣∣∣∣∣ ≤∣∣∣∣∣∫ µ+iT0
µ−iT0
f(z) dz
∣∣∣∣∣+2(T − T0)D
T 2≤M
para cierta constante M y luego∣∣∣∣∣∫ µ+iT
µ−iTf(z)ezt dz
∣∣∣∣∣ ≤Meµt.
Notemos, finalmente, que la funcion 1z−µ0
es la transformada de g(t) := eµ0t, demodo que ∫
(µ)
ezt
z − µ0dz = eµ0t < eµt.
Se deduce entonces que
|K(t)| =
∣∣∣∣∣∫
(µ)
ezt
h(z)dz
∣∣∣∣∣ ≤ keµt (13)
para cierta constante k. En consecuencia, escribiendo
u(t, φ, 0) = φ(0)K(t) + b
∫ τ
0
K(t− s)φ(s− τ) ds
34

obtenemos
|u(t, φ, 0)| ≤ |φ(0)|keµt + |b|‖φ‖∞k∫ τ
0
eµ(t−s) ds
≤ k(
1 + |b|e−µτ − 1
µ
)‖φ‖∞eµt.
A continuacion, veamos como se puede aplicar la formula (10) para estudiar
la estabilidad del origen en ecuaciones lineales perturbadas de la forma
u′(t) = au(t) + bu(t− τ) + f(u(t), u(t− τ)),
donde f : R2 → R es una funcion suave tal que
f(0, 0) = 0, lim(x,y)→(0,0)
f(x, y)
‖(x, y)‖= 0.
Segun mencionamos, esto permitira analizar la estabilidad de los equilibrios paraecuaciones mas generales via linealizacion.
Dado ε > 0, fijemos en primer lugar un valor δε > 0 tal que si ‖(x, y)‖ ≤ δεentonces |f(x, y)| ≤ ε(|x|+ |y|). Por la formula de variacion de los parametros,la solucion del problema anterior con una condicion inicial φ puede escribirsecomo
u(t) = u(t, φ, 0) +
∫ t
0
K(t− s)f(u(s), u(s− τ)) ds.
Supongamos que |u(s)| ≤ δε para s ≤ t, entonces resulta
|u(t)− u(t, φ, 0)| ≤ εk∫ t
0
eµ(t−s)(|u(s)|+ |u(s− τ)|) ds (14)
con k como en (13) y µ > Re(λ) para toda raız caracterıstica λ. Observemosahora que ∫ t
0
eµ(t−s)|u(s− τ)| ds = e−µτ∫ t−τ
−τeµ(t−s)|u(s)| ds
≤ e−µτ(∫ 0
−τeµ(t−s)|φ(s)| ds+
∫ t
0
eµ(t−s)|u(s)| ds)
≤ e−µτ(‖φ‖∞eµt
eµτ − 1
µ+
∫ t
0
eµ(t−s)|u(s)| ds),
En consecuencia,
|u(t)− u(t, φ, 0)| ≤ C‖φ‖∞eµt + εD
∫ t
0
eµ(t−s)|u(s)| ds
35

para C := 1−e−µτµ , D = 1 + eµτ . Luego, tomando ρ como en el Teorema 5.1 se
deduce que
|u(t)| ≤ (ρ+ C)‖φ‖∞eµt + εD
∫ t
0
eµ(t−s)|u(s)| ds
y en consecuencia, llamando v(t) := e−µtu(t), resulta
|v(t)| ≤ (ρ+ C)‖φ‖∞ + εD
∫ t
0
|v(s)| ds.
Entonces |v(t)| ≤ (ρ+ C)‖φ‖∞eεDt, es decir:
|u(t)| ≤ (ρ+ C)‖φ‖∞e(εD+µ)t.
De esta forma, se obtiene:
Teorema 5.2 Sea f como antes y sea h(λ) = λ − a − be−λτ . SupongamosRe(λ) < 0 para toda λ raız de h. Entonces u ≡ 0 es (localmente) asintoticamenteestable.
Demostracion:Fijando µ < 0 tal que µ > supRe(λ), definimos C y D como antes y
elegimos ε > 0 tal que εD + µ < 0. Tomando δ < δε tal que δ ≤ δερ+C resulta,
para ‖φ‖∞ ≤ δ, que si u es una solucion con condicion inicial φ entonces vale
|u(t)| ≤ δεe(εD+µ)t (15)
para todo t. En efecto, consideremos J := t ≥ 0 : |u(s)| ≤ δε para s ≤ t,que claramente es un intervalo cerrado y no vacıo. Como δ < δε, el intervalo Jse extiende a la derecha del 0. Dado t0 > 0 tal que t0 ∈ J , la cuenta anteriordice que vale (15) en [−τ, t0] y, en particular, |u(t0)| ≤ δεe
(εD+µ)t0 < δε. Estoprueba que la desigualdad |u(t)| ≤ δε sigue valiendo un poco a la derecha de t0,vale decir, que J es abierto.
Observacion 5.2 En rigor, el resultado previo dice solamente que si u es unasolucion definida en el intervalo [−τ, T ] entonces vale (15) para t ≤ T . Comoveremos, si f es localmente Lipschitz, esto garantiza que u esta definida en[−τ,+∞) y la desigualdad anterior vale para todo t.
Corolario 5.1 Consideremos el problema
u′(t) = F (u(t), u(t− τ))
con F : R2 → R de clase C1. Sea u∗ ∈ R tal que F (u∗, u∗) = 0 y sea h(λ) =λ− a− be−λτ , donde (a, b) := ∇F (u∗, u∗). Si todas las raıces de h tienen partereal negativa, entonces u∗ es un equilibrio (localmente) asintoticamente estable.
36

Los resultados obtenidos para la ecuacion escalar pueden extenderse de man-era inmediata a sistemas, de la forma
X ′(t) = AX(t) +BX(t− τ)
para A,B ∈ Rn×n, en cuyo caso es facil verificar que la ecuacion caracterısticaresulta
h(λ) := det(λI −A− e−τλB
)= 0.
No haremos esto ahora pues mas adelante veremos la situacion mas general,pero emplearemos esta formula para decir algo sobre la estabilidad del origen.Es claro que no se podra hacer un estudio tan completo como en el caso es-calar, aunque el siguiente resultado muestra que cuando el retardo es pequenola situacion se asemeja bastante al caso sin retardo.
Teorema 5.3 Sean z1, . . . , zk todos los autovalores de la matriz A+ B y seanδ > 0 y s < Re(zj) para todo j = 1, . . . , k. Entonces existe τ∗ > 0 tal que si0 < τ < τ∗ y h(λ) = 0 se cumple:
Re(λ) < s o bien |λ− zj | < δ para algun j.
Demostracion:Consideremos el conjunto
C := z ∈ C : Re(z) ≥ s, |z − zj | ≥ δ para todo j.
Queremos probar que si τ es chico, entonces h−1(0)∩C = ∅. En efecto, supong-amos que existen τn → 0+ y raıces λn de la funcion hn correspondiente a τntales que λn ∈ C. Si la sucesion λn converge a cierto λ, resulta h0(λ) = 0para h0 correspondiente a τ = 0, es decir, h0(λ) = λI − (A+B). Esto dice queλ es autovalor de A+B, lo que es absurdo pues tambien se verifica que λ ∈ C.Luego, tomando una subsucesion podemos suponer |λn| → ∞ y considerar lamatriz
Mn := I − 1
λn
(A+ e−λnτnB
).
Como vale∣∣e−λnτn ∣∣ = e−Re(λn)τn ≤ e−sτn → 0, se deduce que la matriz Mn
converge a la identidad y, en consecuencia, es inversible para n grande. Esto es
absurdo, porque det(Mn) = hn(λn)λn
= 0.
En otras palabras, si el retardo es chico entonces las raıces caracterısticasestan cerca de los autovalores de A + B o bien tienen parte real menor quetodos ellos. Esto garantiza, para valores chicos de τ , la estabilidad asintoticadel origen en caso de que los autovalores de A + B tengan parte real negativamientras que, por otra parte, si algun autovalor simple de A + B tiene partereal positiva, entonces el equilibrio nulo es inestable:
Corolario 5.2 Sean A, B y zjj=1,...,k como antes. Entonces se cumple:
37

1. Si Re(zj) < 0 para todo j, entonces existe τ∗ > 0 tal que el origen es unequilibrio asintoticamente estable para 0 < τ < τ∗.
2. Si Re(zj) > 0 para algun j, entonces existe τ∗ > 0 tal que el origen esinestable para 0 < τ < τ∗.
Demostracion:
1. Basta con tomar δ := −maxRe(zj) : j = 1, . . . , k y aplicar el teoremaanterior.
2. Consideremos hτ (z) = det (zI −A− eτzB) = H(z, τ), vale decir, comofuncion de z y τ . Supongamos Re(zj) = r > 0 y veamos que para τ chicola funcion H(·, τ) se anula en Br(zj). En efecto, si esto no vale entoncesexiste τn → 0 tal que gn := H(·, τn) no se anula en Br(zj). Observemosque gn es analıtica y ademas gn → H(·, 0) uniformemente enBr(zj). ComoH(·, 0) se anula en Br(zj), el teorema de Hurwitz implica que H(z, 0) = 0para todo z ∈ Br(zj), lo que es absurdo.
Observacion 5.3 El Teorema 5.3 y el Corolario 5.2 siguen valiendo para A(τ)y B(τ) funciones continuas de τ , con zj los autovalores de A(0) +B(0).
Observacion 5.4 En particular, para n = 1 se obtiene, para τ chico, que sia+b < 0 entonces el origen es asintoticamente estable y si a+b > 0 es inestable,pues la unica raız z = a + b es obviamente simple. Esta conclusion concuerda(aunque es mas debil) con lo que habıamos obtenido en forma directa en elTeorema 4.1.
6 Sistemas lineales generales
Los resultados obtenidos pueden extenderse para otros sistemas lineales: porejemplo, ecuaciones con varios retardos, o con retardos distribuidos. Podemosconsiderar en general un sistema lineal autonomo de la forma
X ′(t) = L(Xt)
donde Xt(θ) := X(t+θ) y L : C([−τ, 0],Cn)→ Cn es lineal y continua, es decir,existe una constante c tal que
‖L(φ)‖ ≤ c‖φ‖∞
para toda φ, donde ‖ · ‖ denota cualquier norma de Cn. En el caso de retardodiscreto, X ′(t) = AX(t) + BX(t − τ) se tiene L(φ) = Aφ(0) + Bφ(−τ), dondeA y B son matrices fijas y vale
‖L(φ)‖ ≤ |φ(0)|‖A‖+ |φ(−τ)|‖B‖ ≤ c‖φ‖∞,
38

con c = ‖A‖+ ‖B‖.Cabe observar que en esta situacion general ya no se puede aplicar el metodo
de pasos para resolver la ecuacion con una condicion inicial; mas adelante vere-mos que, de todas formas, dicha solucion existe y esta definida para todo t > 0.Por ahora nos ocuparemos unicamente de obtener la ecuacion caracterıstica yextender a esta situacion general los resultados que obtuvimos para el caso deretardo discreto. A tal fin, buscaremos soluciones particulares de la forma
X(t) = eλtV λ ∈ C, V ∈ Cn \ 0.
Por comodidad, definimos la funcion expλ : R→ C dada por expλ(θ) := eλθ, demodo que Xt = eλtexpλV , pues Xt(θ) = X(t+ θ) = eλtexpλ(θ)V . Luego, X essolucion si y solo si
λeλtV = L(Xt) = eλtL(expλV )
para todo t; equivalentemente:
L(expλV ) = λV.
Esta ecuacion puede pensarse como un problema de autovalores y autovectores,ya que si escribimos V =
∑nj=1 vjej , con e1, . . . , en la base canonica de Cn,
resulta
L(expλV ) =
n∑j=1
vjL(expλej) = LλV
donde Lλ es la matriz cuyas columnas son L(expλej) y (sin previo aviso) es-cribimos los vectores como columnas. En otras palabras, X = eλtV es solucionsi y solo si V es un autovector de autovalor λ de la matriz Lλ. Claro que,a diferencia de los problemas clasicos de autovalores y autovectores, la matrizLλ tambien depende de λ; de esta manera, la ecuacion caracterıstica en gen-eral no es polinomial. Mas precisamente, podremos asegurar que existe algunautovector V 6= 0 si y solo si h(λ) = 0, donde
h(λ) := det(λI − Lλ).
Por ejemplo, para el sistema con un retardo discreto tenemos
L(expλej) = expλ(0)Aej + expλ(−τ)Bej = Colj(A) + e−τλColj(B),
es decir, Lλ = A+ e−τλB y
h(λ) = det(λI −A− e−τλB),
que coincide con lo obtenido anteriormente. En general, se puede probar queh cumple propiedades analogas a las que vimos en el caso escalar con retardodiscreto. Para empezar, resulta una funcion entera:
Proposicion 6.1 h : C→ C es analıtica.
39

Demostracion:Como la funcion ‘det’ consiste unicamente de sumas y productos, y λI es
trivialmente analıtica, basta ver que cada coeficiente de la matriz Lλ es unafuncion analıtica. La columna j-esima Cj(λ) de esta matriz es L(expλej), demodo que podemos calcular
Cj(λ+ κ)− Cj(λ)
κ= L
(expλ+κ − expλ
κej
).
Peroexpλ+κ(θ)− expλ(θ)
κ= eλθ
eκθ − 1
κ→ θeλθ
uniformemente en θ ∈ [−τ, 0] para κ→ 0. Esto implica que
Cj(λ+ κ)− Cj(λ)
κ→ L(ϕλej),
donde ϕλ(θ) := θeλθ. Una consecuencia de la anterior proposicion es que, tal como vimos para el
caso escalar con retardo discreto, a la derecha de cualquier recta vertical en elplano complejo h tiene a lo sumo un numero finito de raıces. En efecto, si λnson raıces de h tales que Re(λn) > a entonces |λn| → +∞ y ademas, comodet(λnI − Lλn) = 0, la matriz I − 1
λnLλn no es inversible. Pero
‖Colj(Lλn)‖ = ‖L(expλnej)‖ ≤ c‖expλnej‖∞ = c‖expλn‖∞
y ademas
|expλn(θ)| = |eλnθ| = eRe(λn)θ ≤ eaθ ≤ max1, e−aτ
para todo θ ∈ [−τ, 0]. Luego Lλn es acotada y entonces I − 1λnLλn es inversible
para n grande, lo que es absurdo.Otro resultado que se extiende al caso general es el de estabilidad que
probamos en la seccion 5: si todos los autovalores de la ecuacion caracterısticatienen parte real negativa entonces el origen es asintoticamente estable (para de-talles, ver [4]). Ademas, si Re(λ) > 0 para algun λ entonces X = 0 es inestable.Esto ultimo se ve directo igual que antes, pues en tal caso existe una solucionno trivial de la forma X(t) = eλtV . Tambien se puede generalizar la idea delinealizacion: para el sistema X ′(t) = F (Xt) con F : C([−τ, 0],Rn) → Rntal que F (X∗) = 0 para cierta ‘funcion constante’ X∗, supongamos que F esdiferenciable en X∗, es decir
F (X∗ + φ) = L(φ) +R(X∗ + φ)
con L : C([−τ, 0],Rn)→ Rn lineal continuo y
lim‖φ‖∞→0
R(X∗ + φ)
‖φ‖∞= 0.
40

Entonces, empleando las raıces caracterısticas del sistema lineal X ′(t) = L(Xt),se prueba un resultado analogo al Teorema 5.2.
Para concluir esta seccion, veamos un resultado concerniente a la estabilidadabsoluta, es decir, independiente del retardo. Para el caso escalar u′(t) = au(t)+bu′(t− τ) ya vimos que esto ocurre exactamente en la region a+ b < 0, a ≤ b.En el caso general, es difıcil obtener resultados tan precisos pero, sin embargo,en un gran numero de situaciones es posible determinar condiciones suficientes.Concretamente, supongamos que la ecuacion caracterıstica es de la forma
p(λ) + q(λ)e−τλ = 0, (16)
con p, q polinomios con coeficientes reales tales que gr(p) > gr(q). Por ejemplo,esto ocurre en un sistema X ′(t) = AX(t) + BX(t − τ) con A,B ∈ Rn×n,bajo condiciones apropiadas para la matriz B (en el caso n = 2, basta pedirdet(B) = 0, ver ejercicio 4). Otro ejemplo frecuente es en la ecuacion de ordenn con coeficientes reales y un retardo discreto
x(n)(t) +
n−1∑j=1
ajx(j)(t) + bjx
(j)(t− τ) = 0,
cuya ecuacion caracterıstica es de la forma anterior, con p(λ) = λn+∑n−1j=1 ajλ
j
y q(λ) =∑n−1j=1 bjλ
j . Esto se puede verificar de manera directa proponiendo
soluciones x(t) := eλt o (si uno esta deseoso de hacer mas cuentas) llevando laecuacion a un sistema por medio de la clasica transformacion
x1 := x x2 = x′ . . . xn := x(n−1)
a partir de la que se obtienen las matrices
A =
0 1 0 . . . . . . 00 0 1 0 . . . 00 0 0 1 . . . 0. . . . . . . . . . . . . . . . . .0 . . . . . . . . . 0 1−a0 −a1 . . . . . . . . . −an−1
B =
0 0 0 . . . . . . 00 0 0 0 . . . 00 0 0 0 . . . 0. . . . . . . . . . . . . . . . . .0 . . . . . . . . . 0 0−b0 −b1 . . . . . . . . . −bn−1
y se ve facilmente que det(λI −A− e−λτB) = p(λ) + q(λ)e−λτ con p y q comoantes.
Proposicion 6.2 Sean p, q polinomios tales que
41

1. p no se anula en Re(z) ≥ 0.
2. |q(iy)| < |p(iy)| para y ∈ R.
3. gr(p) > gr(q).
Entonces, para todo τ ≥ 0, todas las soluciones de la ecuacion (16) tienen partereal negativa.
Demostracion:Consideremos el semicırculo DR := z : |z| ≤ R,Re(z) ≥ 0. Para R grande,
se cumple que |q(z)||p(z)| < 1 si |z| = R y, por la condicion 2 se deduce que |q(z)||p(z)| < 1
en ∂DR. Como p no se anula sobre DR, el principio del modulo maximo aseguraque la anterior desigualdad vale en DR y, en consecuencia, para todo z con partereal no negativa. Si λ es solucion de (16) tal que Re(λ) ≥ 0, entonces q(λ) 6= 0(pues p(λ) 6= 0) y
1 <|p(λ)||q(λ)|
= |e−τλ| = e−τRe(λ) ≤ 1,
lo que es absurdo.
Para la ecuacion de orden n, observemos que si el retardo solamente apareceen el termino de orden 0, entonces q es constante. En este caso, el resultadoanterior se puede mejorar cuando todas las raıces de p (eventualmente multiples)estan en R<0:
Proposicion 6.3 Sean p polinomio monico y q ≡ c. Supongamos
1. Todas las raıces de p son numeros reales negativos.
2. |p(0)| > |c|.
Entonces, para todo τ ≥ 0, todas las soluciones de la ecuacion (16) tienen partereal negativa.
Demostracion:Escribiendo p(λ) =
∏nj=1(λ − λj) se deduce, para cualquier λ solucion de
(16):n∏j=1
|λ− λj | = |c|e−Re(λ)τ
Como λj < 0, para Re(λ) ≥ 0 vale |λ− λj | ≥ |λj | y entonces
|p(0)| =n∏j=1
|λj | ≤ |c|,
lo que es absurdo.
42

A fin de entender este ultimo resultado, veamos que ocurre en la ecuacionescalar de primer orden para la cual h(λ) = λ− a− beλτ , es decir: p(λ) = λ− ay q ≡ b. El resultado previo dice, entonces, que si a < 0 y a+ |b| < 0 entoncesel origen es absolutamente estable. Dejando de lado la semirrecta a = b < 0,este resultado coincide exactamente con lo obtenido en la seccion 4.
6.1 Ejercicios
1. Consideremos la ecuacion lineal
u′(t) = a(τ)u(t) + b(τ)u(t− τ) t > 0
con a(τ), b(τ) ∈ R. Probar:
(a) Si a(τ) + b(τ) > 0, entonces el equilibrio nulo es inestable.
(b) Si a(τ) + b(τ) < 0, y b(τ) ≥ a(τ) entonces el equilibrio nulo esasintoticamente estable.
¿Que ocurre cuando a(τ) + b(τ) < 0, y b(τ) < a(τ)?
2. Para la ecuacion de Nicholson
u′(t) = −du(t) + bu(t− τ)e−u(t−τ)
con b, d > 0, probar:
(a) Si b > d, entonces existe un equilibrio positivo u∗. Determinar condi-ciones suficientes para la estabilidad asintotica local de u∗.
(b) Si b < d entonces 0 es el unico equilibrio no negativo, que resultalocalmente asintoticamente estable.
(c) Probar que si b ≤ d entonces 0 es un atractor global para las solu-ciones positivas. Mas precisamente, si u es solucion con dato inicialφ > 0, entonces u(t) esta definida y es positiva para todo t > 0, conu(t) → 0 para t → +∞. Sugerencia: verificar primero que u no sepuede anular. Luego, usar que si u′(t) ≥ 0 entonces u(t) ≤ f(u(t−τ)),con f(x) = xe−x.
3. Deducir una formula de variacion de parametros para el sistema lineal
X ′(t) = AX(t) +
N∑k=1
BkX(t− τk)
para A,B1, . . . , BN ∈ Rn×n y retardos arbitrarios τ1, . . . , τN > 0. Mostrarque la ecuacion caracterıstica tiene la forma
h(λ) := P (λ, e−τ1λ, . . . , e−τNλ) = 0,
donde P es un polinomio de grado n en N + 1 variables.
43

4. Para A,B ∈ R2×2, probar que
h(λ) = λ2−Tr(A)λ+det(A)+e−2τλdet(B)+e−τλ(dAB +dBA−Tr(B)λ),
donde dXY denota el determinante de la matriz formada por la primeracolumna de X y la segunda columna de Y .
5. Sean L : C([−τ, 0],Cn) → Cn lineal y continua y f : [0,+∞) → Cncontinua. Mostrar que las soluciones de X ′(t) = L(Xt) + f(t) con datoinicial φ ∈ C([−τ, 0],Cn) se pueden escribir en la forma
X(t) = X(t, φ, 0) +X(t, 0, f).
6. Encontrar la ecuacion caracterıstica para el problema con retardo dis-tribuido
x′(t) = ax(t) +
∫ t
t−τb(t− s)x(s) ds.
7. Sea L : C([−τ, 0],Rn) → Rn lineal continua. Probar que λ es raız carac-terıstica si y solo si λ es raız caracterıstica.
8. Considerar el siguiente modelo para el control de los niveles de testos-terona:
R′(t) = f(T (t))− b1R(t)L′(t) = g1(R(t))− b2L(t)T ′(t) = g2(L(t− τ))− b3T (t)
donde todas las constantes son positivas y f es una funcion positiva yestrictamente decreciente en [0,+∞). Probar que existe un unico puntode equilibrio con coordenadas positivas y estudiar su estabilidad.
9. (a) Sean p(λ) = λ2 + rλ + s y q ∈ R. Probar que todas las solucionesde la ecuacion p(λ) + qe−τλ = 0 tienen parte real negativa para todoτ ≥ 0, bajo alguna de las siguientes condiciones:
i. r2
2 ≥ s > |q|.ii. r2
2 < s y |q| < r2
√4s− r2.
Sugerencia: empleando el principio del mınimo, probar que existey ≥ 0 tal que |p(iy)| ≤ |p(λ)| para todo λ tal que Re(λ) ≥ 0. Calcularexplıcitamente el valor |p(iy)|2.
(b) Hallar matrices A,B ∈ R2×2 tales que lo anterior se pueda aplicar alsistema X ′(t) = AX(t) +BX(t− τ).
7 Teorıa basica: Existencia y unicidad
En la seccion previa estudiamos la ecuacion caracterıstica de un sistema linealgeneral del tipo
X ′(t) = L(Xt),
44

donde L : C([−τ, 0],Cn)→ Cn es lineal y continua y Xt : [−τ, 0]→ Cn esta dadapor Xt(θ) = X(t + θ). Esto incluye los sistemas lineales con retardo discretoaunque, como vimos, abarca tambien casos en los que el metodo de pasos no esaplicable para resolver el problema de encontrar una solucion con una condicioninicial φ. Cabe preguntarse, entonces, si son validas las siguientes afirmaciones,intuitivamente ‘razonables’:
• Existe solucion.
• La solucion es unica.
• La solucion esta definida en [−τ,+∞).
En lo que sigue vamos a extender los resultados usuales para sistemas deecuaciones ordinarias a situaciones generales, del tipo
X ′(t) = F (t,Xt). (17)
Cuando analizamos la ecuacion caracterıstica para sistemas lineales, resulto deutilidad pensar directamente en funciones a valores complejos; sin embargo,en lo que sigue podemos estudiar sin perdida de generalidad el caso real. Enconsecuencia, supondremos que F : R×C([−τ, 0],Rn)→ Rn cumple aquello queuno suele llamar vagamente ‘hipotesis apropiadas’, entre las cuales seguramenteaparecera en algun lado el nombre propio ‘Lipschitz’. Pero antes, para fijarideas, consideremos una vez mas el caso de retardo discreto
X ′(t) = f(t,X(t), X(t− τ))
para f : R × Rn × Rn → Rn continua, con una condicion inicial que, como yavimos, debe ser una funcion definida en un intervalo de longitud τ . Y, como laidea de encontrar soluciones maximalmente definidas consiste en “pegar” solu-ciones definidas en intervalos chicos, conviene pensar que dicho intervalo no esnecesariamente [−τ, 0]. Claramente, podrıamos suponer entonces que φ es unafuncion continua definida en cierto intervalo [t0− τ, t0] y obtener nuestros resul-tados a partir de allı, aunque resultara mas comodo (y, de paso, mas interesante)entender la cuestion a partir de la filosofıa de los sistemas dinamicos. A tal finrecordemos que, dado un sistema de ecuaciones ordinarias X ′(t) = f(t,X(t))con f continua y localmente Lipschitz, se define el flujo Φ(t, t0, X0) como X(t),donde X es la unica solucion con condicion inicial X(t0) = X0. En otras pal-abras, para cada instante t, la funcion Φ describe la evolucion del sistema apartir del estado inicial X0 dado en el instante inicial t0; la ecuacion diferenciales, ni mas ni menos, la ley segun la cual evoluciona dicho sistema. En el caso deuna ecuacion con retardo, los ‘estados’ ya no son vectores de Rn sino funciones,pues la ley de evolucion en cada instante t depende de Xt; por consiguiente, lastrayectorias son ahora curvas γ(t) := Xt trazadas sobre el espacio de dimensioninfinita C([−τ, 0],Rn). Bajo este punto de vista, la manera apropiada de definiruna condicion inicial en un instante t0 consiste simplemente en decir cual es elestado del sistema en t0, vale decir:
Xt0 = φ (18)
45

para cierta φ ∈ C([−τ, 0],Rn).Buscamos una solucion, es decir, una funcion X continua definida en cierto
intervalo [t0 − τ, t0 + δ] que cumpla la condicion inicial (18) y ademas satisfagala ecuacion para t ∈ [t0, t0 + δ]. Como dice el tango, siempre se vuelve al primeramor: en este caso, el metodo de pasos, que garantiza la existencia de una unicasolucion del problema
X ′(t) = f(t,X(t), φ(t− t0 − τ)), X(t0) = φ(0)
si se pide que f sea localmente Lipschitz respecto de X (observemos, de paso,que no hace falta pedir que la dependencia respecto de X(t− τ) sea Lipschitz).En principio, el valor δ ∈ (0, τ ] puede ser muy pequeno, pero si la solucionesta definida hasta δ = τ entonces se repite el procedimiento para extender lasolucion un poco mas a la derecha, y ası sucesivamente. Ademas, si X estadefinida en cierto [t0 − τ, t0 + δ) y no se puede extender, necesariamente debe‘explotar’, es decir, ‖X(t)‖ → ∞ para t→ (t0 + δ)−. Para ver esto, alcanza conaplicar los resultados que ya conocemos: basta tomar k =
[δτ
]y observar que
X es la (unica) solucion del sistema de ecuaciones ordinarias
Y ′(t) = f(t, Y (t), X(t− τ)), Y (t0 + kτ) = X(t0 + kτ)
y no se puede extender hacia la derecha.En el caso general, diremos que la funcion F : R × C([−τ, 0],Rn) → Rn es
localmente Lipschitz respecto de X si para todo I = [a, b] ⊂ R y todo M > 0existe una constante L tal que
‖F (t, φ)− F (t, ψ)‖ ≤ L‖φ− ψ‖∞para todo t ∈ I y todas las funciones φ, ψ ∈ C([−τ, 0],Rn) que verifican‖φ‖∞, ‖ψ‖∞ ≤ M . Si bien esto no implica continuidad respecto de t, porsimplicidad siempre supondremos que F es continua. Por ejemplo, si F es linealen su segunda variable entonces la constante L depende solo de I, pues
‖F (t, φ)− F (t, ψ)‖ = ‖F (t, φ− ψ)‖ ≤ C(t)‖φ− ψ‖∞,
donde C(t) := sup‖φ‖∞=1 ‖F (t, φ)‖. Es facil verificar que existe una constanteL tal que C(t) ≤ L para todo t ∈ I: en efecto, en caso contrario existentn y φn con ‖φn‖∞ = 1 tales que ‖F (tn, φn)‖ ≥ n. Podemos suponer quetn → t para algun t, luego tomando ψn := φn√
nse tiene que F (tn, ψn)→ F (t, 0)
pero ‖F (tn, ψn)‖ ≥√n, lo que es absurdo. En situaciones ası, en las que L
depende solamente del intervalo I, diremos que F es globalmente Lipschitz enI × C([−τ, 0],Rn).
Para cualquier φ dada, buscar una solucion del problema con la condicioninicial Xt0 = φ equivale a encontrar una funcion X en el espacio de Banach
E := C([t0 − τ, t0 + δ],Rn)
tal que Xt0 = φ y
X(t) = φ(0) +
∫ t
t0
F (s,Xs) ds para t > t0.
46

Aunque parezca una obviedad, es oportuno aclarar que la integral esta biendefinida, pues la funcion s 7→ F (s,Xs) es continua y, en consecuencia, integrable.Para verificar esto, basta observar que se trata de la composicion de F con latrayectoria s 7→ (s,Xs), que resulta continua debido a la continuidad uniformede X.9
Teorema 7.1 Sea F como antes, continua y localmente Lipschitz respecto deX. Dados t0 ∈ R y R > 0, existe δ > 0 que depende solamente de t0 y Rtal que para toda φ ∈ C([−τ, 0],Rn) con ‖φ‖∞ ≤ R existe una unica solucionX = X(t, φ) del problema definida en [t0 − τ, t0 + δ].
Demostracion:Buscamos un punto fijo del operador T : E → E definido por
T X(t) :=
φ(t− t0) t ≤ t0
φ(0) +∫ tt0F (s,Xs) ds t > t0.
Para ello veremos que, eligiendo δ de manera apropiada, existe alguna bolacerrada B del espacio E tal que T (B) ⊂ B y ademas T : B → B es una con-traccion. Cabe destacar que, al igual que en la teorıa de ecuaciones ordinarias,mas adelante las soluciones se extienden ‘lo mas que se pueda’ hacia la derecha,de modo que, en esta demostracion, no nos interesa encontrar un valor optimopara δ. Por eso podemos, por ejemplo, ‘planificar’ de antemano que δ ≤ τ y queB := B2R(0), es decir, la bola cerrada de radio 2R centrada en 0. Observemosque si ‖X‖∞ ≤ 2R entonces para t > t0 vale
‖T X(t)‖ ≤ ‖φ(0)‖+
∫ t
t0
‖F (s,Xs)‖ ds ≤ R+ δC,
dondeC ≥ sup
t0≤t≤t0+τ,‖ψ‖≤2R
‖F (t, ψ)‖.
Aparece aquı un detalle importante, que marca una nueva diferencia con el casosin retardo: ¿como sabemos, en la ultima desigualdad, que el supremo existe?El hecho de que F sea continua no es suficiente pues B, por mas cerrado yacotado que sea, no es un conjunto compacto. Sin embargo, podemos tomar laconstante de Lipschitz L correspondiente al intervalo I = [t0, t0 + τ ] y el valorM = 2R para obtener, para cualquier ψ ∈ B y t ∈ I:
‖F (t, ψ)‖ ≤ ‖F (t, ψ)− F (t, 0)‖+ ‖F (t, 0)‖ ≤ L‖ψ‖∞ + ‖F (t, 0)‖.9En efecto, dado ε > 0 se puede elegir η > 0 tal que
‖Xs −Xs‖∞ = supθ∈[−τ,0]
‖X(s+ θ)−X(s+ θ)‖ < ε
si |s − s| < η. Como dijimos, se trata de una obviedad, aunque deja una ligera sensacion deinquietud ante la idea de extender estos resultados para el caso de retardos infinitos.
47

De esta forma se acaban las sospechas pues, felizmente, I sigue siendo compactoy luego
‖F (t, ψ)‖ ≤ 2RL+ supt∈I‖F (t, 0)‖ := C.
Volviendo a nuestro asunto, tenemos entonces que ‖T X(t)‖ ≤ R+δC para t > t0y ademas T Xt0 = φ, de modo que ‖T X(t)‖ ≤ R para t ≤ t0. En consecuencia,si elegimos δ ≤ R
C se verifica que ‖T X‖∞ ≤ 2R, es decir, T (B) ⊂ B.Por otra parte, para X,Y ∈ B se tiene que T X(t) = T Y (t) si t ≤ t0,
mientras que para t > t0 vale
‖T X(t)− T Y (t)‖ ≤∫ t
t0
‖F (s,Xs)− F (s, Ys)‖ ds ≤∫ t
t0
L‖Xs − Ys‖∞ ds
y entonces‖T X − T Y ‖∞ ≤ δL‖X − Y ‖∞.
Aquı el lector experimentado dira que alcanza con achicar δ de manera queδL < 1; de esta forma, T resulta una contraccion y tiene un unico punto fijo enB. Esto es cierto, con la unica observacion de que ya podemos dejar al valorδ tranquilo sin que hagan falta mas (por ası decirlo) recortes: con la eleccionanterior δ = minτ, RC es suficiente, ya que C ≥ 2RL y entonces δL ≤ 1
2 .
Resta ver la unicidad, pues (siempre es bueno aclararlo) el teorema de puntofijo de Banach solo garantiza que la solucion es unica en el conjunto B, peroen principio podrıa haber soluciones con norma ‘grande’. Inspirados en el casosin retardo, podemos intentar usar una desigualdad del tipo Gronwall, aunquedebemos tener algo de cuidado. En efecto, si Y es otra solucion, es claro quecoincide con X para t ≤ t0, mientras que para t > t0 resulta, como antes
‖X(t)− Y (t)‖ ≤∫ t
t0
‖F (s,Xs)− F (s, Ys)‖ ds.
Claro que el anterior valor L ya no sirve, porque era la constante de Lipschitzpara el intervalo I y el valor M = 2R, pero podemos tomar una nueva constantede Lipschitz L correspondiente al mismo I y un nuevo valor M , definido comoel maximo entre ‖Y ‖∞ y 2R. De este modo,
‖X(t)− Y (t)‖ ≤∫ t
t0
L‖Xs − Ys‖∞ ds.
La desigualdad de Gronwall no se aplica directamente pues la funcion queaparece en el integrando no es la misma que aparece en el termino de la izquierda;sin embargo, basta observar que
‖Xs − Ys‖∞ = sup−τ≤θ≤0
‖X(s+ θ)− Y (s+ θ)‖
y, para θ ∈ [−τ, 0],
‖X(t+ θ)− Y (t+ θ)‖ ≤∫ t
t0
L‖Xs − Ys‖∞ ds.
48

En consecuencia, si
u(t) := ‖Xt − Yt‖∞ = sup−τ≤θ≤0
‖X(t+ θ)− Y (t+ θ)‖
resulta
u(t) ≤∫ t
t0
Lu(s) ds
y (Gronwall, al fin) se deduce que u ≡ 0.
Generalizando la ultima desigualdad de la demostracion anterior se deduceel siguiente resultado de continuidad respecto de la condicion inicial:
Corolario 7.1 Sea F continua y localmente Lipschitz respecto de X y consid-eremos, para t0 ∈ R y R > 0 fijos, los valores L y δ del teorema anterior. Dadasφ, ψ ∈ C([−τ, 0],Rn) con ‖φ‖∞, ‖ψ‖∞ ≤ R, se cumple, para todo t ∈ [t0, t0 + δ]:
supt−τ≤s≤t
‖X(s, φ)−X(s, ψ)‖ ≤ ‖φ− ψ‖∞eL(t−t0).
Demostracion:De acuerdo con el teorema previo, tanto X(·, φ) como X(·, ψ) pertenecen a
la bola B. Como antes, para t ∈ [t0, t0 + δ] definimos
u(t) := sup−τ≤θ≤0
‖X(t+ θ, φ)−X(t+ θ, ψ)‖
y resulta
u(t) ≤ ‖φ− ψ‖∞ +
∫ t
t0
Lu(s) ds,
de dondeu(t) ≤ ‖φ− ψ‖∞eL(t−t0).
Tal como ocurre en la teorıa de ecuaciones diferenciales ordinarias, los resul-
tados anteriores permiten deducir que para toda φ existe un intervalo maximalIφ, claramente abierto, sobre el cual X(·, φ) esta definida y no puede extendersehacia la derecha. Sin embargo, a diferencia del caso sin retardo, si este intervaloes acotado eso no significa que necesariamente ‖X(t)‖ → ∞ cuando t se acercaal extremo superior de Iφ. Pero sı vale, como es de esperar, que el ‘estado’ Xt
tiende a infinito dentro del espacio de funciones:
Teorema 7.2 Sea F continua y localmente Lipschitz respecto de X. Supong-amos que X es una solucion definida en [t0 − τ,A) que no se puede extenderhasta t = A, entonces ‖Xt‖∞ →∞ para t→ A.
Demostracion:Supongamos que existen tn A y R > 0 tales que ‖Xtn‖∞ ≤ R. Repasando
la demostracion del teorema de existencia, vemos que la eleccion del valor δ
49

se puede hacer de manera independiente de tn, fijando, por ejemplo, para elintervalo I = [t1, A+ τ ] y M = 2R la correspondiente constante L de Lipschitzy luego el valor C como en la demostracion del teorema de existencia. Luego,podemos definir una funcion Y como la unica solucion del problema que satisfacela condicion inicial Ytn = Xtn . Para n suficientemente grande, Y esta definidapor lo menos hasta el valor tn+δ > A; ademas, por unicidad resulta que Y = Xpara t ≥ tn, lo que es absurdo.
A modo de ejemplo basico de aplicacion del resultado previo se tiene que
-como es de esperar-, las soluciones de ecuaciones lineales estan globalmentedefinidas, vale decir, se extienden al intervalo [−τ,+∞). Esto se puede compro-bar en forma directa, o tambien como consecuencia del siguiente resultado masgeneral:
Teorema 7.3 Sea F continua y localmente Lipschitz respecto de X y supong-amos que F crece a lo sumo linealmente en X, es decir, existen a, b ≥ 0 local-mente integrables tales que
‖F (t, φ)‖ ≤ a(t)‖φ‖∞ + b(t)
para todo t y toda φ. Entonces X(·, φ) esta globalmente definida para todaφ ∈ C([−τ, 0],Rn).
Demostracion:Escribiendo
X(t) = φ(0) +
∫ t
t0
F (s,Xs) ds
para t > t0 resulta
‖X(t)‖ ≤ ‖φ‖∞ +
∫ t
t0
b(s) ds+
∫ t
t0
a(s)‖Xs‖∞ ds.
Como antes, se deduce que
‖Xt‖∞ ≤ ‖φ‖∞ +
∫ t
t0
b(s) ds+
∫ t
t0
a(s)‖Xs‖∞ ds
y por Gronwall
‖Xt‖∞ ≤(‖φ‖∞ +
∫ t
t0
b(s) ds
)e∫ tt0a(s) ds
.
En consecuencia, Xt no puede ‘explotar’ en ningun intervalo acotado.
Un caso particular del resultado previo que incluye, segun mencionamos,los problemas lineales, es aquel en el cual F es globalmente Lipschitz sobrecada intervalo acotado (es decir, la constante L depende unicamente de I). Esinteresante, en este caso, verificar que la demostracion se puede hacer de manera
50

directa, comprobando que el operador T satisface, para cierto N suficientementegrande, que T N = T T . . . T (N veces) es una contraccion y tiene, enconsecuencia, un unico punto fijo (comparar con el ejercicio 6 del Apendice).
A modo de observacion, cabe destacar que, en el caso de uno o mas retardosdiscretos, el metodo de pasos da un resultado mas preciso que el teorema previo,pues la restriccion en el crecimiento debe imponerse solamente a la variable X.Mas precisamente, si tenemos la ecuacion
X ′(t) = f(t,X(t), X(t− τ1), . . . , X(t− τM ))
para que haya existencia y unicidad basta pedir, como vimos, que f sea continuay localmente Lipschitz en X (es decir, en su segunda variable). Ademas, si ftiene crecimiento a lo sumo lineal en X, entonces la solucion esta globalmentedefinida. Esto queda como ejercicio para el lector (ejercicio 2) y se cumple, porejemplo, en sistemas de la forma
X ′(t) = A(t)X(t) +G(t,X(t− τ1), . . . , X(t− τM ))
donde A : R→ Rn×n y G : R× (Rn)M → Rn son continuas.
Para concluir esta seccion, vamos a saldar una antigua deuda y dar las defini-ciones de estabilidad que hasta el momento empleamos de manera imprecisa.Consideremos el sistema general
X ′(t) = F (t,Xt)
y supongamos que e es un punto de equilibrio, es decir, una solucion constante, loque equivale a decir que F (t, e) = 0 para todo t. Como es habitual, ignoraremosel isomorfismo entre Rn y las funciones constantes de C([−τ, 0],Rn), de modoque supondremos directamente e ∈ Rn.
El equilibrio e se dice estable si para cualquier t0 y cualquier ε > 0 existeδ > 0 tal que si ‖φ‖∞ < δ entonces ‖X(t)‖ < ε para todo t ≥ t0, donde X esuna (unica, si se pide la condicion de Lipschitz) solucion tal que Xt0 = φ. Siademas existe r > 0 tal que X(t)→ e para t→ +∞ cuando ‖φ‖ < r, entonces elequilibrio se dice (localmente) asintoticamente estable.10 Finalmente, e se diceinestable cuando no es estable (esta definicion es la mas facil de todas). Cuandoel sistema es autonomo (es decir, F no depende de t), en la definicion anteriorbasta considerar siempre t0 = 0. Mas en general, se puede definir la estabilidadde una solucion X(t) cualquiera, tarea que queda como ejercicio para el lector.
7.1 Ejercicios
1. Sea f : R × Rn × Rn → Rn continua y localmente Lipschitz en las dosultimas variables. Escribir el sistema X ′(t) = f(t,X(t), X(t − τ)) en laforma X ′(t) = F (t,Xt) y probar que F es continua y localmente Lipschitzen X.
10El ‘ademas’ puede ser un poco desconcertante, pero cabe observar que el comportamientoasintotico no implica, por sı solo, la estabilidad.
51

2. Sea f : R × RN × (Rn)M → Rn continua y localmente Lipschitz en lasegunda variable. Entonces para toda φ el problema de valores iniciales
X ′(t) = f(t,X(t), X(t− τ1), . . . , X(t− τM )), Xt0 = φ
tiene solucion unica definida en cierto intervalo maximal [t0, A). Ademas,si f tiene crecimiento a lo sumo lineal respecto de la segunda variable, esdecir,
‖f(t,X, Y1, . . . , YM )‖ ≤ a(t, Y1, . . . , YM )‖X‖+ b(t, Y1, . . . , YM )
para ciertas funciones a y b localmente acotadas, entonces A = +∞.
3. Sea F : R × C([−τ, 0],Rn) → Rn continua y de clase C1 respecto de X.¿Vale siempre que F es localmente Lipschitz en X?
4. Probar el teorema de existencia y unicidad por medio de la iteracion dePicard
X0(t) := φ(0) para t0 ≤ t ≤ t0 + δ, (X0)t0 = φ,
y
Xn+1(t) := φ(0)+
∫ t
t0
F (s, (Xn)s) ds para t0 ≤ t ≤ t0 + δ, (Xn+1)t0 = φ
5. Considerar el sistema x′(t) = y(t)− x(t− τ)y′(t) = y(t)
(a) Probar que para τ = 0 las soluciones con condiciones iniciales nonegativa permanecen no negativas.
(b) ¿Sigue valiendo lo anterior para τ > 0?
6. Sea C+n ⊂ Rn el cono positivo cerrado, es decir,
C+n := x ∈ Rn : xj ≥ 0, j = 1, . . . , n
y sea f : R×Rn×Rn → Rn continua y de clase C1 en la segunda variable.Supongamos que para todo j vale la siguiente condicion:
xj = 0⇒ fj(t, x, y) = 0.
Probar que para toda condicion inicial φ tal que φ(t) ∈ C+n para todo t,
la solucion del problema
X ′(t) = f(t,X(t), X(t− τ)), Xt0 = φ
satisface X(t) ∈ C+n para todo t ≥ t0 para el que X(t) esta definida.
52

7. Sea f : R≥0 → R>0 continua y decreciente y sea a : R → R continua tal
que limT→∞∫ T
0a(s) ds = +∞.
Para el problema x′(t) = −a(t)x(t) + f(x(t− τ)), probar:
(a) Las soluciones con condicion inicial φ : [t0 − τ, 0]→ R≥0 estan glob-almente definidas y son estrictamente positivas para t > 0.
(b) Si x e y son soluciones tales que x(t) ≥ y(t) ≥ 0 para todo t ≥ t0entonces limt→+∞ x(t)− y(t) = 0. Sugerencia: si z(t) := x(t)− y(t)entonces z′(t) + a(t)z(t) ≤ 0 para t ≥ t0 + τ . En consecuencia,v(t) := eA(t)z(t), donde A es una primitiva de a, es decreciente.
(c) Si el problema admite alguna solucion T -periodica, entonces a esT -periodica.
(d) Dos soluciones positivas T -periodicas se cruzan al menos dos vecesen cada perıodo.
(e) Supongamos que a(t) ≥ 0 para todo t. Si x e y son dos solucionespositivas, entonces existe t0 tal que |x(t) − y(t)| ≤ τg(0) para todot ≥ t0. Sugerencia: Si t0 y t1 son ceros consecutivos de z := x − ytales que t1 > t0 + τ entonces
maxt0≤t≤t1
|z(t)| = maxt0≤t≤t0+τ
|z(t)|.
Por otro lado, si z > 0 en (t0, t0 +τ) entonces z′+az < g(0). Deducirque
z(t) ≤ g(0)
∫ t
t0
e−∫ tsa(r) dr ds ≤ (t− t0)g(0).
8. Para la ecuacion de Nicholson, probar:
(a) Las soluciones con condicion inicial positiva estan globalmente defini-das y son positivas.
(b) Si x es solucion, entonces existe t0 tal que x(t) ≤ bde para todo t ≥ t0.
¿Contradice esto el hecho de que si b > d entonces x∗ = ln bd es un
punto de equilibrio?
(c) Si b > de, deducir del ejercicio previo que si x es una solucion talque x(t) ≥ 1 para t 0 entonces x oscila alrededor del equilibriox∗ = ln b
d o bien x(t)→ x∗ para t→ +∞.
9. Enunciar y probar un teorema de existencia y unicidad para una ecuacionde orden n.
8 Teorema de Schauder
En la seccion previa vimos la forma de extender, de manera mas o menos es-perable, los resultados clasicos de la teorıa de ecuaciones ordinarios al caso con
53

retardo. Pero si hablamos de resultados ‘clasicos’, tambien tenemos que men-cionar el teorema de Peano, que asegura, para el problema X ′(t) = f(t,X(t))con f continua, la existencia de al menos una solucion con condicion inicialX(t0) = X0 definida en algun entorno de t0. En otras palabras, al no pedir lacondicion de Lipschitz se pierde la unicidad, pero no la existencia.11
La demostracion habitual del teorema de Peano se sigue del teorema deaproximacion de Weierstrass y -por supuesto- del hecho de que ya sabemos queel teorema de existencia y unicidad vale para funciones localmente Lipschitz.En efecto, alcanza con fijar un entorno compacto K de (t0, X0) y una sucesionde funciones suaves fn (por ejemplo, polinomios) que converge uniformementesobre K a la funcion f . Extendiendo las funciones fn de manera que estenacotadas en R × Rn, podemos suponer que la unica solucion Xn del problemaaproximado X ′(t) = fn(t,X(t)) con condicion inicial X(t0) = X0 esta definidaen un entorno [t0− δ, t0 + δ] fijo y su grafico, para dicho entorno, esta contenidoen K. Como ademas la sucesion X ′n esta uniformemente acotada, se deducedel teorema de Arzela-Ascoli que Xn tiene una subsucesion que convergeuniformemente a cierta funcion X, que resulta ser una solucion del problema.
Sin embargo, existe otra demostracion mas directa, que ademas es mas facilde adaptar para el problema con retardo. Vimos, en efecto, que la cuestion dela existencia se reduce a encontrar un punto fijo de un cierto operador T , parael cual obtuvimos una bola cerrada invariante B y, gracias a la condicion deLipschitz, logramos aplicar el teorema de punto fijo de Banach. La novedades que bajo ciertas condiciones (las famosas ‘condiciones apropiadas’) se puedeasegurar que T tiene un punto fijo, sin necesidad de que sea una contraccion.Antes de continuar, conviene repasar un poco la construccion que vimos unaspaginas atras, para el problema
X ′(t) = F (t,Xt), Xt0 = φ.
Asumiendo que ‖φ‖∞ ≤ R, la idea consistio en tomar simplemente B := B2R(0),dentro del espacio de Banach E := C([t0−τ, t0+δ],Rn). El operador T se definepor (T X)t0 = φ y
T X(t) = φ(0) +
∫ t
t0
F (s,Xs) ds
para t > t0; como vimos, eligiendo δ suficientemente chico se puede garantizarque T (B) ⊂ B. Pero fue precisamente en esta cuenta donde usamos el hechode que F es localmente Lipschitz, para asegurar que la norma ‖F (s,Xs)‖ semantiene acotada. En general, la continuidad de F no alcanza para asegurarque existe una cota valida para toda X ∈ B, de modo que pediremos unacondicion mas fuerte (aunque no tanto como la de Lipschitz). Concretamente,se trata de una condicion de compacidad.
11Podrıamos reformular aquı el famoso dicho basado en el mito de Pandora, diciendo quela existencia es lo ultimo que se pierde.
54

Definicion 8.1 Sean X,Y espacios metricos. Una funcion continua g : X → Yse dice compacta si para todo A ⊂ X acotado la clausura de g(A) es un conjuntocompacto.
Observacion 8.1 Si g es lineal, la continuidad se deduce de la condicion decompacidad. Sin embargo, esto no vale en general.
En nuestro caso particular, basta pedir que F mande conjuntos acotados deR×C([−τ, 0],Rn) a conjuntos acotados de Rn... cuya clausura es, obviamente,compacta. La buena noticia es que si imponemos esta condicion, entonces el op-erador T antes definido tambien resulta compacto: esto se debe (como siempre)al teorema de Arzela-Ascoli. En efecto, la continuidad es bastante inmediatapues si por ejemplo Xn → X uniformemente sobre I = [t0 − τ, t0 + δ], entoncespara t > t0 vale
‖T Xn(t)− T X(t)‖ ≤∫ t
t0
‖F (s, (Xn)s)− F (s,Xs)‖ ds.
Por la continuidad de F , para cada s ∈ [t0, t0 + δ] fijo el integrando tiende a 0;ademas, la sucesion Xn esta acotada; de este modo, como F manda acotadosen acotados, existe una constante C tal que ‖F (s, (Xn)s)−F (s,Xs)‖ ≤ C paratodo n y todo s ∈ [t0, t0 + δ]. El resultado se deduce entonces por el teorema deconvergencia mayorada. Por otra parte, si ‖X‖∞ ≤M y t2 > t1 ≥ t0 resulta
‖T X(t2)− T X(t1)‖ =
∥∥∥∥∫ t2
t1
F (s,Xs) ds
∥∥∥∥ ≤ ∫ t2
t1
‖F (s,Xs)‖ ds ≤ k(t2 − t1)
para cierta constante k que depende solo de M , lo que permite deducir laequicontinuidad (los casos, t0 ≥ t2 > t1 y t2 > t0 > t1 se deducen facilmenteusando la continuidad uniforme de φ).
La misma condicion garantiza, eligiendo δ adecuadamente, que B = B2R(0)es un conjunto invariante para T . Para ver esto, supongamos que ‖F (t, ψ)‖ ≤ Cpara todo t ∈ [t0, t0 + τ ] y ‖ψ‖∞ ≤ 2R, entonces claramente ‖TX(t)‖ ≤ δCpara todo t. De este modo, si pedimos δ = minτ, 2R
C entonces T (B) ⊂ B. Acontinuacion veremos un resultado que asegura que, bajo estas condiciones, Ttiene al menos un punto fijo.
Por supuesto, si el espacio fuera de dimension finita no habrıa que preocu-parse por hacer nada mas, pues el teorema de Brouwer garantiza que cualquierfuncion continua de una bola cerrada en sı misma tiene un punto fijo. Esto estrivial en el caso unidimensional (teorema de Bolzano) y todavıa bastante sen-cillo para dimension 2: por ejemplo, es muy famosa la demostracion que empleateorıa de juegos (concretamente, el llamado teorema del Hex ). Para quien sabealgo de analisis complejo -por ejemplo, el lector que logro llegar hasta aquı-tambien hay una manera elemental de verlo: si f : B1(0) → B1(0) es continuay no tiene puntos fijos, entonces basta tomar g(z) := z − f(z) y γ(t) := eit, cont ∈ [0, 2π]. Definiendo
h(t, s) :=
sγ(t) + (1− s)g(γ(t)) 0 ≤ s ≤ 1
g((1 + s)γ(t)) −1 ≤ s ≤ 0
55

se ve que h es continua y no se anula.12 En consecuencia, el ındice de la curvah(·, s) respecto del 0 es el mismo para todo s, lo que es absurdo, pues h(t, 1) =γ(t), que tiene ındice 1, mientras que h(·,−1) es constante y entonces su ındicees 0. Para dimension mayor, las pruebas habituales no son tan elementales ysuelen recurrir a la homologıa, o bien a resultados de la combinatoria como elLema de Sperner. De todas formas, existe una demostracion que, mirada concierto carino, reproduce la idea geometrica de la prueba que acabamos de verpara n = 2 (ver por ejemplo [5]).
Como sea, es sabido que el teorema de Brouwer no se extiende de manera au-tomatica a dimension infinita. El contraejemplo mas celebre es el de Kakutani,quien mostro que en cualquier espacio de Hilbert separable se puede encontraruna funcion continua T : B1(0)→ B1(0) sin puntos fijos. La idea es muy simple,se apoya en el hecho de que si ejj∈N es una base, entonces el operador linealS de shift, que manda cada ej a ej+1 es una isometrıa y deja fijo unicamente alorigen. Entonces podemos considerar por ejemplo
T (x) =√
1− ‖x‖2e1 + S(x),
que esta definida y es continua en la bola cerrada unitaria. Ademas,
‖T (x)‖2 = 1− ‖x‖2 + ‖S(x)‖2 = 1,
de modo que en realidad T (B1(0)) ⊂ ∂B1(0). Si x es un punto fijo de T , sunorma debe ser 1 y luego x = T (x) = S(x), lo que es absurdo. Otro ejemplomas concreto es el siguiente: sobre la bola unitaria cerrada de L2(0, 1) definimosla funcion T dada por
T f(x) :=
−f(
2x1+‖f‖
)x < 1+‖f‖
2
1 x ≥ 1+‖f‖2 .
Es facil ver que T es continua; ademas,
‖T f‖2 =
∫ 1+‖f‖2
0
f
(2x
1 + ‖f‖
)2
dx+ 1−(
1 + ‖f‖2
).
Por sustitucion, se deduce que
‖T f‖2 =
(1 + ‖f‖
2
)(‖f‖2 − 1) + 1 ≤ 1.
Si f es un punto fijo de T , de la igualdad ‖T f‖2 = ‖f‖2 se ve que ‖f‖ = 1 yentonces f(x) = −f(x) para todo x < 1, lo que es absurdo.
No es difıcil comprobar que el ‘culpable’ de que existan estos ejemplos es,por supuesto, el conocido hecho de que en los espacios normados de dimension
12Esto ultimo es trivial si s ≤ 0 y, para s ≥ 0 se debe al hecho de que |f(z)| ≤ 1 para todoz: en efecto, si h(t, s) = 0 entonces γ(t) = (1− s)f(γ(t)) y entonces s = 0, f(γ(t)) = γ(t), loque es absurdo.
56

infinita la bola unitaria no es compacta. Tal es, en esencia, la conclusion que sedesprende del teorema de Schauder, que constituye la extension mas razonabledel teorema de Brouwer a espacios generales de Banach. Para ello, convieneprimero probar un lema que asegura que los operadores compactos se puedenaproximar, sobre conjuntos acotados, por operadores de de rango finito (es de-cir, cuya imagen esta contenida en un subespacio de dimension finita). Masprecisamente,
Lema 8.2 Sea C un subconjunto de un espacio normado E y sea T : C → Econtinua tal que T (C) es compacto. Dado ε > 0 existe Tε : C → E continuade rango finito tal que ‖Tε(x) − T (x)‖ < ε para todo x ∈ C. Mas aun, existenx1, . . . , xN ∈ T (C) tales que Tε(C) esta contenido en la capsula convexa dex1, . . . , xN.
Demostracion:Cubriendo T (C) por bolas Bε(x) con x ∈ T (C) podemos elegir xj tales que
la union de las bolas Bj := Bε(xj) con j = 1, . . . , N cubren T (C). DefinamosVε := genx1, . . . , xN y veamos que la funcion Tε : C → Vε dada por Tε(x) =∑Nj=1 ajxj , con
aj :=dist(T (x), Bcj )∑Nk=1 dist(T (x), Bck)
cumple lo pedido. En primer lugar, para todo x ∈ C existe algun j tal queT (x) ∈ Bj y, en consecuencia, dist(T (x), Bcj ) > 0. Esto dice que Tε esta bien
definida, y claramente es continua. Ademas,∑Nj=1 aj = 1, de modo que Tε(x)
pertenece a la capsula convexa de x1, . . . , xN y, ademas, podemos escribir
Tε(x)− T (x) =
N∑j=1
aj(xj − T (x)).
Observemos finalmente que si ‖xj−T (x)‖ ≥ ε (es decir, si T (x) /∈ Bj) entoncesaj = 0, de modo que
‖Tε(x)− T (x)‖ ≤N∑j=1
aj‖xj − T (x)‖ < ε.
El mencionado teorema de Schauder es consecuencia directa del resultado
previo y el teorema de Brouwer.
Teorema 8.1 (Schauder) Sean E un espacio normado, C ⊂ E convexo, cer-rado y acotado y T : C → C continuo tal que T (C) es compacto. Entoncesexiste x ∈ C tal que T (x) = x.
Demostracion:
57

Para ε = 1n consideramos Tn := Tε y Vn := Vε como en el lema anterior.
Como C es cerrado y convexo, se cumple que T (C) ⊂ C y entonces Tn(Vn∩C) ⊂Vn ∩C. Por el teorema de Brouwer (generalizado a un convexo compacto en unespacio de dimension finita, que es homeomorfo a la bola unitaria) se deduce queTn tiene un punto fijo xn ∈ Vn∩C y, por compacidad, tomando una subsucesionpodemos suponer que T (xn) converge a cierto x ∈ C. Luego
‖T (xn)− xn‖ = ‖T (xn)− Tn(xn)‖ ≤ 1
n,
de donde se obtiene que xn → x y en consecuencia T (x) = x.
A modo de aplicacion, obtenemos la anunciada extension del teorema dePeano para el caso de ecuaciones con retardo.
Teorema 8.2 Sea F : R × C([−τ, 0],Rn) → Rn compacta. Dado R > 0 existeδ > 0 tal que para toda φ ∈ C([−τ, 0],Rn) con ‖φ‖∞ ≤ R el problema
X ′(t) = F (t,Xt), Xt0 = φ
tiene al menos una solucion definida en [t− τ, t0 + δ].
Demostracion:En la situacion de las paginas previas, vimos ya que el operador T : E → E
es compacto y, ademas, T (B) ⊂ B. El resultado se deduce entonces del teoremade Schauder.
Pero mas alla de esta aplicacion especıfica, el teorema de Schauder resultade utilidad para resolver diversos problemas; en particular, para la busquedade soluciones periodicas, es decir, tales que X(t + T ) = X(t) para un ciertovalor T > 0, denominado perıodo. A tal fin, la idea que mejor refleja el aspectodinamico del problema es, sin duda, el operador de Poincare. Para el caso deun sistema de ecuaciones ordinarias
X ′(t) = f(t,X(t)),
se trata simplemente de resolver el problema con una condicion inicial X(t0) =X0 y dejar que evolucione el sistema hasta que -con un poco de suerte- al cabode un tiempo T volvamos a encontrarnos en el estado X0. Claro que esto no essimplemente cuestion de buena punterıa, sino que se define un operador P que,para cada valor inicial X0 calcula la solucion (unica, si f es localmente Lipschitzen X) correspondiente, evaluada en t0 + T .
Claro que esto esconde algunas dificultades. Por un lado, para poder definirP (X0) la solucion debe estar definida en [t0, t0 + T ], cosa que no siempre esfacil saber de antemano: en otras palabras, el dominio de P puede ser unconjunto difıcil de establecer. Por otro lado, encontrar un punto fijo de P(es decir, cierto X0 tal que P (X0) = X0) no garantiza que tengamos realmente
58

una solucion T -periodica a menos que pidamos que para todo X la funcion fsea T -periodica en la variable t. En tal caso, si definimos Y (t) = X(t+ T ) valeque Y (t0) = X(t0 + T ) = X0 y ademas
Y ′(t) = X ′(t+ T ) = f(t+ T,X(t+ T )) = f(t, Y (t)),
de donde se deduce por unicidad que X = Y . Notemos, ademas, que la con-tinuidad respecto del dato inicial nos dice que P es una funcion continua, asique tenemos todo lo que necesitamos... solo falta encontrar un conjunto en elcual se pueda asegurar que P tiene un punto fijo.
En algunos casos, esto resulta sorprendentemente facil: a modo de ejemploelemental, consideremos la ecuacion escalar
x′(t) + x(t) = sen(t)f(x(t))
para cierta f : R → R localmente Lipschitz. Por el metodo de variacion delos parametros, obtenemos la siguiente formula para la solucion con condicioninicial x(0) = x0:
x(t) = x0e−t +
∫ t
0
essen(s)f(x(s)) ds.
Sin embargo, por el momento esto no parece servir de mucho, porque no sabemosnada sobre f . Pero si por ejemplo pedimos que f sea una funcion acotada, lacosa cambia: en efecto, vale
|x(2π)− x0e−2π| ≤
∫ 2π
0
es|f(x(s))| ds ≤ C
para cierta constante C. De esta forma, si |x0| ≤ R para R grande se ve que|x(2π)| ≤ R y por el teorema de Brouwer (que en este caso es Bolzano) existex0 en el intervalo [−R,R] tal que x(2π) = x0. El mismo resultado vale si fno es acotada pero sublineal y, por supuesto, se extiende de modo inmediato asistemas.
A esta altura, el lector se preguntara por que estamos hablando de todoesto si, en el fondo, lo unico que nos hizo falta fue el teorema de Brouwer. Sinembargo, como veremos a continuacion, la cuestion se complica cuando se tratade una ecuacion con retardo. Aunque, en el fondo, no tanto ya que... ¡habemusSchauder!
8.1 Operador de Poincare en dimension infinita
En la seccion previa vimos un resultado que permite encontrar puntos fijos defunciones definidas en espacios de dimension infinita: se trata del teorema deSchauder, que garantiza que si C es un convexo cerrado y acotado de un espacionormado y T : C → C es continua con T (C) precompacto, entonces T tiene unpunto fijo. Esto nos sirvio para extender el teorema de Peano para ecuacionescon retardo pero, ademas, tiene aplicaciones a diversos problemas, entre otros,
59

el de encontrar soluciones periodicas, es decir, tales que existe T > 0 tal queX(t+T ) = X(t) para todo t. Segun dijimos, en el caso sin retardo esto se puedeefectuar mediante el operador P de Poincare, que se define calculando, para t0y un valor inicial X0, el valor de la correspondiente solucion en t0 + T . Unpunto fijo de P determina una solucion X de la ecuacion que ademas cumpleX(t0) = X(t0 + T ); si la ecuacion es T -periodica entonces (por unicidad) sededuce que X es T -periodica.
Para el caso con retardo X ′(t) = F (t,Xt) con F continua, T -periodica en t ylocalmente Lipschitz en X, la diferencia crucial reside en el hecho de que ahorala condicion inicial es una funcion, de modo que el operador de Poincare estadefinido en algun subconjunto del espacio de dimension infinita C([−τ, 0],Rn).Pero ya sabemos que la solucion depende continuamente de la condicion inicialφ, de modo que para D := dom(P ) el operador P : D → C([−τ, 0],Rn) dadopor P (φ) = Xt0+T , donde X = X(t, φ) es la unica solucion con condicioninicial Xt0 = φ, resulta continuo. Sin embargo, para poder aplicar Schaudernecesitamos que P sea compacto... y, para ser francos, el panorama no es deltodo alentador, ya que no parece haber forma de garantizar que las solucionescon condicion inicial φ ∈ BR(0) ⊂ D se encuentran acotadas por una constanteindependiente de R. Para salir del aprieto podemos proponer la ya mencionadacondicion de sublinealidad:
‖F (t, φ)‖ ≤ a(t)‖φ‖∞ + b(t)
con a, b ≥ 0 continuas y T -periodicas. Esto parece una condicion ligeramentebestial, pero que al menos asegura que P manda acotados en acotados y, depaso, que D = C([−τ, 0],Rn). Como vimos, en efecto, para t > t0 vale
‖Xt‖∞ ≤ ‖φ(0)‖+
∫ t
t0
a(s)‖Xs‖∞ ds+
∫ t
t0
b(s) ds;
luego
‖Xt‖∞ ≤(‖φ(0)‖+
∫ t
t0
b(s) ds
)e∫ tt0a(s) ds
y en particular, para ‖φ‖∞ ≤ R, resulta
‖P (φ)‖∞ = ‖Xt0+T ‖∞ ≤
(R+
∫ t0+T
t0
b(s) ds
)e∫ t0+Tt0
a(s) ds.
Claro que esta cota sirve solamente para el primero de nuestros objetivos, aunque
es demasiado grosera y, como∫ t0+T
t0a(s) ds > 0, en ningun caso permite pro-
bar que P (BR(0)) ⊂ BR(0). Mas aun, la cota no sirve ni siquiera en el caso,aparentemente sencillo, de que F sea acotada (es decir, a = 0), pues el terminode la derecha resulta de todas formas mayor que R. Y esta bien que ası sea,porque estamos ante un problema resonante, vale decir: el problema homogeneoX ′(t) = 0 tiene soluciones periodicas no triviales (obviamente, las constantes).
60

Esto se traduce en el hecho de que si tenemos una solucion periodica del prob-lema
X ′(t) = F (t,Xt)
entonces integrando de los dos lados se obtiene∫ t0+T
t0
F (t,Xt) dt = X(t0 + T )−X(t0) = 0.
De esta forma, se encuentra una manera muy facil de fabricar ejemplos para loscuales no existe solucion: por ejemplo, si alguna de las coordenadas de F tienesigno constante. Esto muestra que, a veces, la tarea de encontrar un conjuntocerrado convexo invariante puede terminar en un rotundo fracaso.
Pero antes de preocuparnos por estas dificultades, todavıa falta terminar dever si P es compacto. Llegado este punto, puede llamar la atencion que ahora,para ver la equicontinuidad, es preciso tener en cuenta un detalle que antes,cuando probamos la compacidad de T , ignoramos por completo. Aunque enrealidad no lo ignoramos, sino que se trataba de algo trivial. Lo que hicimos enaquel momento fue escribir, para t ≥ t0
T X(t) = φ(0) +
∫ t
t0
F (s,Xs) ds
y luego, si t2 > t1 ≥ t0, se verifica que
‖T X(t2)− T X(t1)‖ ≤ ‖∫ t2
t1
‖F (s,Xs)‖ ds ≤ C(t2 − t1).
Sin mayor detalle, dijimos que los casos restantes se deducen de la continuidaduniforme de φ. En efecto, dado ε > 0, basta tomar δ < C
2 de manera tal que‖φ(s)− φ(t)‖ < ε
2 para |s− t| < δ. De esta forma, podemos asegurarnos de que‖T X(t2) − T X(t1)‖ < ε para cualquier t1 < t0 y cualquier t2 cuya distancia at1 sea menor que δ.
El inconveniente que tenemos ahora es que no se trata de una φ que estafija, sino que justamente el operador de Poincare es una funcion cuya variablees φ. De este modo, el δ de la continuidad uniforme no se puede elegir -valgala redundancia- de manera uniforme en BR(0).13 Un verdadero problemon...aunque justo en ese instante en que estamos por resignarnos y admitir que ‘deesta no zafamos’, llega en nuestro auxilio la observacion milagrosa: el operadorde Poincare tiene en cuenta unicamente el estado Xt0+T , que solo ‘mira’ loque ocurre a partir del valor t0 + T − τ . Entonces las papas (y el honor)quedan a salvo si pedimos una condicion mas o menos obvia: T ≥ τ .14 De estamanera, los problematicos ‘casos restantes’ quedan borrados de un plumazo
13Si esto pudiera hacerse, la bola tendrıa que ser compacta.14En el caso con retardo, poner T = τ es hacer trampa, pues el problema se reduce a
encontrar soluciones periodicas para una ecuacion ordinaria.
61

y la equicontinuidad de P (BR(0)) se prueba casi igual que antes, pues parat ∈ [t0 + T − τ, t0 + T ] vale
P (φ)(t) = X(t) = φ(0) +
∫ t
t0
F (s,Xs) ds
donde X es la unica solucion de la ecuacion tal que Xt0 = φ.Ahora sı, estamos en condiciones de ocuparnos del otro asunto, en general
bastante delicado: encontrar un convexo cerrado invariante. Como vimos, in-cluso el caso F acotada, que parecıa sencillo, se puede poner feo. Ası que,motivados por glorias preteritas, vamos a intentar en primer lugar con uno queanduvo bien para una ecuacion sin retardo, algo del tipo
x′(t) + x(t) = F (t, xt).
Ahora el problema no es resonante pues, para cualquier perıodo T , la unicasolucion periodica de x′(t) + x(t) = 0 es la trivial. En tal caso, el hecho de queF sea acotada y T -periodica en t transforma el problema en algo practicamentetrivial: en efecto, para podemos tomar t0 = 0 y escribir como en el ejemploprevio, para t > 0,
x(t) = φ(0)e−t +
∫ t
0
es−tF (s,Xs) ds.
Luego, para ‖φ‖∞ ≤ R resulta
‖x(t)‖∞ ≤ Re−t + C
para todo t. En particular,
‖xT ‖∞ ≤ Reτ−T + C
lo que muestra, para T > τ , que la bola de radio R es invariante si elegimosR ≥ C
1−eτ−T .Por supuesto, la existencia de un convexo cerrado acotado invariante C puede
probarse en muchos otros casos y -dicho sea de paso- de ser ası, no hace faltaprobar que P es compacto. En efecto, sea quien sea la funcion compacta F , laequicontinuidad de P (C) sale igual que antes y, ademas: ¡es obvio que P (C) esacotado!
Intuitivamente, se puede ver una situacion de ese estilo, por ejemplo, cuandoes posible demostrar que para cierto R vale:
• x(t) = R⇒ x′(t) < 0.
• x(t) = −R⇒ x′(t) > 0.
En efecto, en tal caso las soluciones que comienzan con una condicion inicial enla bola de radio R no pueden escapar de allı. Esto brinda otra justificacion paranuestro exito en el ejemplo previo
x′(t) = −x(t) + F (t, xt)
62

con |F (t, φ)| ≤ B. Si tomamos R > B se verifica, para x(t) = R, que x′(t) =−R + F (t, xt) < 0. Del mismo modo, para x(t) = −R vale que x′(t) > 0 y elresultado queda probado.
La prueba, como dirıa Borges, “es tan irreprochable como baladı”, aunqueda lugar a una observacion inmediata: en estos casos, no importa lo que pasecon F para valores mas grandes de x. Mas precisamente, alcanza con pedir|F (t, φ)| < R para todo t y toda φ cuya norma sea R, condicion que se se puedegeneralizar de manera inmediata para un sistema:
‖F (t, φ)‖ < R (19)
para todo t y toda φ ∈ C([−τ, 0],Rn) tal que ‖φ‖∞ = R. En efecto, si se cumple(19) se verifica que si ‖X(t)‖ = R = ‖Xt‖ entonces el vector −X(t) + F (t,Xt)apunta hacia adentro de la bola. Esto significa que si comenzamos en un estadoinicial φ de norma menor que R y suponemos que la norma de la solucionX correspondiente alcanza el valor R por primera vez en cierto t, entonces‖Xt‖∞ = R y, ademas, si multiplicamos la ecuacion por X(t), resulta
〈X ′(t), X(t)〉 = 〈−X(t), X(t)〉+ 〈F (t,Xt), X(t)〉 < 0.
Pero el termino de la izquierda es la derivada de la funcion ϕ(s) := ‖X(s)‖22 en
el valor t; en otras palabras, cerca de la esfera de radio R el valor de la normade X decrece, lo que es absurdo. Del mismo modo, se ve que si ‖φ‖∞ = Rentonces el valor de la norma de X inicialmente decrece y luego no puede llegarnuevamente a R.
Con esta idea en mente vemos que, en definitiva, todo lo que hizo falta enel ejemplo anterior es la propiedad de que el campo vectorial inducido por F‘apunte hacia adentro’. Por eso, en el caso general sin retardo
X ′(t) = f(t,X(t))
alcanza con que f sea continua y localmente Lipschitz en X tal que
〈f(t,X), X〉 < 0 para ‖X‖ = R.
Es facil encontrar una condicion analoga para el caso de un retardo discreto(ver ejercicio 3).
Para concluir, veamos otra manera de encarar estos problemas, que si bienemplea las mismas herramientas, se apoya en una filosofıa esencialmente dis-tinta. Ahora la idea consistira en buscar un punto fijo directamente en el espaciode funciones T -periodicas
CT := CT (R,Rn) = X ∈ C(R,Rn) : X(t+ T ) = X(t) para todo t
con la habitual norma del supremo. Como primer intento, se podrıa pretenderbuscar, para cada Y ∈ CT , una solucion T -periodica del problema
X ′(t) = F (t, Yt)
63

y definir un operador de punto fijo a partir de allı. Sin embargo, nos topamosuna vez mas con el inconveniente de la resonancia: por un lado, no es ciertoque para todo Y hay una solucion T -periodica; por otro lado, en caso de existir,tal solucion no es unica.15 Existen diversas maneras de sortear esta dificultad,aunque algunas escapan al objetivo de estas notas. Por el momento, nos lim-itaremos a tratar un caso elemental, en el que el operador lineal asociado no esresonante. Por ejemplo, la ecuacion
x′(t) = a(t)x(t) + F (t, xt)
donde a ∈ CT (R,R) y F es continua y T -periodica en t. Veamos que si∫ T0a(t) dt 6= 0 entonces el problema
x′(t)− a(t)x(t) = ϕ(t)
tiene, para toda ϕ ∈ CT , una unica solucion x = xϕ ∈ CT . En efecto, unopuede apelar a ‘resultados conocidos’ (ver ejercicio 6) o bien hacer la cuentadirectamente. Empleando el metodo de variacion de parametros, vemos que lasolucion general tiene la forma
x(t) = Ce∫ t0a(s) ds +
∫ t
0
e−∫ tsa(r) drϕ(s) ds. (20)
Para que x sea T -periodica, la condicion (necesaria y suficiente) es que x(T ) =x(0), vale decir,
Ce∫ T0a(s) ds +
∫ T
0
e−∫ Tsa(r) drϕ(s) ds = C
lo que determina, gracias a nuestra hipotesis, un unico valor
C =1
1− e∫ T0a(s) ds
∫ T
0
e−∫ Tsa(r) drϕ(s) ds.
Es inmediato verificar ademas que la aplicacion ϕ 7→ x es continua. De estaforma, se tiene un operador T : CT → CT definido como sigue. Por empezar,dada y ∈ CT definimos la funcion real ϕy(t) := F (t, yt), que claramente es T -periodica y ademas (ejercicio) continua. Luego, definimos T (y) = xϕy , es decir,la unica solucion T -periodica del problema
x′(t) = a(t)x(t) + F (t, yt).
Finalmente, para que las cosas funcionen como corresponde, vamos a imponer lacondicion habitual de que F sea compacto, lo que en este caso apenas significa
15 No esta de mas observar que, en algun sentido, se trata de ‘un mismo lado’, ya que parael problema periodico (ver ejercicio 6) los operadores del tipo LX(t) := X′(t) +A(t)X(t) conA ∈ CT (R,Rn×n) siempre son operadores de Fredholm de ındice 0 (es decir, la dimension delnucleo es finita y coincide con la codimension de la imagen).
64

que manda conjuntos acotados en conjuntos acotados. Bajo esta hipotesis, esfacil ver que T es un operador compacto y, con un poco de buena fortuna, po-dremos encontrar algun conjunto sobre el cual aplicar el teorema de Schauder.A modo de ejemplo, consideremos el siguiente problema, motivado por aplica-ciones biologicas
x′(t) = a(t)x(t) + f(x(t− τ))
con a ∈ CT (R,R) tal que∫ T
0a(t) dt < 0 y f : R → R≥0 continua tal que
f(0) 6= 0. Todo parece indicar que el problema periodico es facil de resolversi f es acotada16, ası que intentaremos relajar un poco la condicion y pedirsolamente que sea sublineal en +∞:
limx→+∞
f(x)
x= 0.
En realidad, pediremos un poco menos: que para x > 0 valga
f(x) ≤ εx+ b
para cierto ε suficientemente chico y cierta constante b. Inspirados por lasaplicaciones, nuestro objetivo en este caso es encontrar soluciones positivas delproblema, ası que en realidad vamos a definir T (y) = x como la unica solucionT -periodica de la ecuacion lineal
x′(t) = a(t)x(t) + f(|y(t− τ)|).
Si observamos con cuidado la formula (20), junto con el calculo posterior de C,podemos deducir la existencia de una constante c independiente de ϕ tal que‖x‖∞ ≤ c‖ϕ‖∞. De esta manera, para x = T y se obtiene
‖x‖∞ ≤ c‖f(|y(· − τ)|)‖∞ ≤ c(ε‖y‖∞ + b)
De esta forma, si εc < 1 concluimos que T tiene al menos un punto fijo x en labola BR(0) ⊂ CT con R = cb
1−cε . Veamos, finalmente, que x es positiva. Para
ello, supongamos que x(t0) < 0 para algun t0 y definamos A(t) :=∫ tt0a(s) ds.
Como (e−Ax
)′(t) = e−A(t)f(|x(t− τ |) ≥ 0,
entonces valee−A(t0+T )x(t0 + T ) ≥ x(t0)
y luego, por periodicidad,e−A(t0+T ) ≤ 1,
lo que es absurdo ya que A(t0 + T ) =∫ T
0a(t) dt < 0.
16Cabe observar, de todas formas, que a diferencia del metodo de Poincare no estamospidiendo que f sea localmente Lipschitz. Sin embargo, se puede verificar que el metodo dePoincare se puede extender tambien a este caso, resolviendo problemas aproximados y usandoArzela-Ascoli (ver ejercicio 5).
65

8.2 Ejercicios
1. Sean b, d : R → R>0 continuas y T -periodicas tales que b(t) > d(t) paratodo t. Probar que la ecuacion de Nicholson no autonoma
u′(t) = −d(t)u(t) + b(t)u(t− τ)e−u(t−τ)
tiene al menos una solucion T -periodica positiva. Sugerencia: como enel ejercicio de la practica anterior, probar que toda solucion x con dato
inicial φ ≤ M := maxt
(b(t)d(t)e
)verifica x(t) ≤ M para todo t. Luego,
elegir ε > 0 tal que xe−x ≥ εe−ε para ε ≤ x ≤ M y ε ≤ ln b(t)d(t) para todo
t. Verificar que si φ ≥ ε entonces x(t) ≥ ε para todo t.
2. Hallar condiciones suficientes para la existencia de soluciones T -periodicaspositivas para las siguientes ecuaciones (asumir siempre que los parametrosson funciones T -periodicas positivas):
(a) Modelos Logısticos:
x = x(t)
[a(t)−
n∑i
bi(t)x(t− τi(t))
]
x = x(t)
(a(t)− b(t)
∫ t
t−τ(t)
c(s)x(s)ds
)(b) Lasota-Wazewska:
x = −a(t)x(t) + c(t)e−b(t)x(t−τ(t))
(c) Mackey-Glass:
x = −a(t)x(t) +b(t)x(t− τ(t))
1 + xn(t− τ(t))
(d) Gompertz:
x = −a(t)x(t) + b(t)x(t) lnc(t)
x(t− τ(t))
(e) Michaelis-Menten:
x = x(t)
[a(t)− b(t)x(t− τ(t))
1 + c(t)x(t− τ(t))
].
3. Consideremos el problema
X ′(t) = f(t,X(t), X(t− τ)) (21)
con f : R×Rn ×Rn → Rn continua, T -periodica en la primera variable ylocalmente Lipschitz en la segunda.
66

(a) Supongamos que existe R > 0 tal que
〈f(t,X, Y ), X〉 < 0 (22)
para todo t y para todos los X,Y ∈ Rn tales que ‖X‖ = R, ‖Y ‖ ≤ R.Entonces
i. Si φ : [−τ, 0] → Rn es continua tal que ‖φ‖∞ ≤ R entonces lasolucion X del problema (21) con condicion inicial Xt0 = φ estadefinida en [t0 − τ,+∞).
ii. El problema (21) tiene al menos una solucion T -periodica.
(b) Supongamos ahora que vale (22) para ‖X‖ = ‖Y ‖ = R. Probar queexiste τ∗ > 0 tal que (21) tiene una solucion T -periodica para τ < τ∗.
4. Sea f : R × Rn → Rn continua, T -periodica en t y localmente Lipschitzen X. Supongamos que existe R > 0 tal que
〈f(t,X), X〉 > 0
para todo X tal que ‖X‖ = R y todo t. Probar que el problema
X ′(t) = f(t,X(t))
tiene al menos una solucion periodica. ¿Que ocurre en el caso de unsistema con retardo? Comparar con el ejercicio anterior.
5. Probar que los resultados de existencia de los dos ejercicios previos siguenvaliendo aunque no se pida la condicion de Lipschitz para f . Sugerencia:Aproximar f por funciones suaves y emplear el teorema de Arzela-Ascoli.
6. Sean A ∈ CT (R,Rn×n) y sea L : CT ∩C1(R,Rn)→ CT (R,Rn) el operadordefinido por LX := X ′ +AX.
(a) Probar que dim(Ker(L)) = codim(Im(L)) ≤ n.
(b) Deducir una condicion necesaria y suficiente para que el problemaLX(t) = F (t,Xt) tenga solucion periodica para cualquier funcionF : R× CT (R,Rn)→ Rn continua, acotada y T -periodica en t.
7. Sean T > 0 y a 6= 0.
(a) Probar que existe τ∗ > 0 tal que el problema x′(t) = au(t − τ) notiene soluciones T -periodicas no triviales para τ < τ∗.
(b) Sea τ < τ∗ fijo. Probar que existe una constante c > 0 tal que paratoda funcion T -periodica x de clase C1 vale
‖x‖∞ ≤ c‖x′ − ax(· − τ)‖∞.
67

(c) Sea f ∈ C1(R,R) tal que f(0) = 0 y f ′(0) 6= 0. Probar que existeb∗ > 0 tal que para todo τ < τ∗ y toda b continua T -periodica talque ‖b‖∞ < b∗ el problema
x′(t) = f(x(t− τ)) + b(t)
tiene al menos una solucion T -periodica. ¿Vale la conclusion cuandof ′(0) = 0?
(d) Generalizar para cualquier valor xe tal que f(xe) = 0.
(e) Dado n ∈ N arbitrario, encontrar f y b tal que el problema admitaal menos n soluciones T -periodicas no constantes.
9 Sistemas (semi)dinamicos
A diferencia de las secciones anteriores (salvo, claro esta, la primera), esta noempieza diciendo ‘como vimos en la seccion previa’, pues vamos a comenzarcon un tema nuevo: especıficamente, algunas cuestiones ligadas a los sistemasdinamicos inducidos por ecuaciones con retardo. Aunque es difıcil desarraigarciertos habitos, de modo que para motivar el tema mencionaremos (como vi-mos en secciones previas...) en primer lugar el flujo asociado a un sistema deecuaciones ordinarias
X ′(t) = f(t,X(t)),
en donde f : R×Rn → Rn es continua y localmente Lipschitz en X. Para cadacondicion inicial (t0, X0) existe una unica solucion X definida en un entorno det0, lo que permite entonces definir el flujo
Φ(t, t0, X0) := X(t).
Los resultados clasicos nos dicen que Φ es una funcion continua definida encierto conjunto D ⊂ R × R × Rn, que no siempre es facil de establecer. Comosea, obviamente valen las propiedades:
1. Φ(t0, t0, X0) = X0.
2. Φ(t, t1,Φ(t1, t0, X0)) = Φ(t, t0, X0).
Por supuesto, se entiende que la segunda propiedad vale ‘siempre que tengasentido’ (es decir, siempre que los vectores involucrados se encuentren en D) yse desprende de la unicidad, pues la unica solucion que en t1 vale Φ(t1, t0, X0)es precisamente la misma que ‘evoluciono’ a partir del estado X0 en el que seencontraba en el instante t0. Esto parece un juego de palabras, pero surgesimplemente de observar que si X es la solucion que en t0 vale X0, entoncesla solucion que en t1 vale Φ(t1, t0, X0) = X(t1) necesariamente es la misma.Un caso especial es el de los sistemas autonomos, en los que f no dependeexplıcitamente de t y se puede suponer siempre que t0 = 0, pues
Φ(t, t0, X0) = Φ(t− t0, 0, X0)
68

En efecto, siX es la solucion con condicion inicialX(t0) = X0 entonces llamandoY (t) := X(t+ t0) se tiene que
Y ′(t) = X ′(t+ t0) = f(X(t+ t0)) = f(Y (t))
y ademas Y (0) = X(t0) = X0, por lo cual Φ(t − t0, 0, X0) = Y (t − t0) = X(t).En tal caso, el flujo se puede escribir directamente como funcion de las variablest y X0.
Una situacion similar se presenta para los sistemas de ecuaciones con retardoaunque (¡como vimos!) los estados no son ahora vectores de Rn sino funcionesen el espacio C([−τ, 0],Rn). Y, como tambien vimos, esta clase de sistemas seresuelve solamente hacia adelante. Esto va a motivar que nuestros sistemas, envez de dinamicos, se llamen semi-dinamicos.
Ya estamos en condiciones de esbozar un panorama general mas abstracto,a partir de la idea intuitiva de que un sistema dinamico consiste en un conjuntoE de estados y una regla Φ, que describe como cambian dichos estados con eltiempo. El valor Φ(t, t0, X0) indica cual es, a tiempo t, el estado del sistema queen el tiempo inicial t0 tiene el estado X0. Por simplicidad vamos a suponer queΦ esta definida para todo tiempo t, que puede ser discreto (t ∈ Z) o continuo(t ∈ R). Mas en general, se puede asumir que t toma valores en un grupo.
Un sistema dinamico es entonces una funcion Φ : S×E → E que cumple lasanteriores condiciones 1 y 2, donde S = Z × Z o S = R × R. Cuando E es unespacio metrico, se pide ademas que Φ sea una funcion continua. Finalmente, enel caso de los sistemas semi-dinamicos, se pide tambien que t ≥ t0, es decir, sereemplaza el conjunto S por (para decirlo de un modo rebuscadısimo) el epigrafode su diagonal. Para decirlo en criollo, simplemente se trata del conjunto
S := (t, t0) ∈ S × S : t ≥ t0.
Un sistema semi-dinamico discreto viene siempre determinado a partir de unafamilia Fn : E → E de funciones y la regla evolutiva se puede escribir como unaecuacion en diferencias:
Xn+1 = Fn(Xn).
En otras palabras, la funcion Fn dice cual va a ser el estado en el instante n+ 1de un sistema que, en el instante n, se encuentra en el estado Xn. En el contextode antes (para t = n y t0 = k) , esto significa que
Φ(n, k,Xk) = Fn−1 . . . Fk(Xk).
La dependencia respecto de n expresa el hecho de que el sistema es no autonomo,pero si se trata siempre de una misma funcion Fn = F , entonces lo que se tieneson sencillamente iteraciones de F :
Xn+1 = F (Xn)
Φ(n, k,X) = Φ(n− k, 0, X) = Fn−k(X).
69

Aquı se ve que el prefijo ‘semi’ es inevitable pues hay que pedir n ≥ k. Salvo,claro esta, que F sea biyectiva y entonces podemos tachar el ‘semi’ con la mayorde las tranquilidades.
Respecto de los sistemas semi-dinamicos continuos, obviamente nuestro ejem-plo tıpico (por eso estamos hablando del tema) va a estar dado por una ecuacioncon retardo
X ′(t) = F (t,Xt) (23)
con F : R × C([−τ, 0],Rn) → Rn continua y localmente Lipschitz. Por elmomento, asumiremos que las soluciones estan globalmente definidas hacia laderecha. El conjunto de estados es E = C([−τ, 0],Rn) y la funcion Φ se defineentonces para t ≥ t0 como Φ(t, t0, φ) = Xt, donde X es la solucion cuyo estadoa tiempo inicial t0 es φ. Queda como ejercicio verificar que Φ cumple con las doscondiciones antes enunciadas y ademas resulta continua (para esto hay que usarobviamente lo visto en las secciones previas, cuando probamos la continuidadrespecto de φ).
Motivados por esta idea, definimos lo que significa solucion de un sistemadinamico abstracto:
Definicion 9.1 Una solucion de un sistema semi-dinamico continuo Φ es unafuncion s : I → E, donde I ⊂ R es un intervalo no trivial, tal que para todoslos valores t, t0 ∈ I tales que t ≥ t0 se cumple
s(t) = Φ(t, t0, s(t0)).
A modo de ejemplo tautologico, veamos que una solucion es solucion. Ex-presado ası, parece una tonterıa, pero en realidad se trata de verificar que ennuestro anterior ‘ejemplo tıpico’ las dos definiciones coinciden. En efecto, siX es una solucion de (23) definida en el intervalo I := [A,+∞), podemospensarla como la funcion s : I → C([−τ, 0],Rn) dada por s(t) = Xt. Si fi-jamos t0 ∈ I y t ≥ t0, se tiene por definicion que Xt = Φ(t, t0, Xt0), vale decir,s(t) = Φ(t, t0, s(t0)). Recıprocamente, dada una solucion s : I → C([−τ, 0],Rn),sabemos que s(t) = Φ(t, t0, s(t0)) es el estado a tiempo t ≥ t0 de la unicasolucion X de la ecuacion (23) con condicion inicial Xt0 = s(t0). En consecuen-cia, Xt = s(t).
Otro ejemplo evidente de solucion, para un sistema cualquiera, es la trayec-toria definida por s(t) = Φ(t, t0, X0), para X0 ∈ E fijo y t ≥ t0. En efecto, porla primera condicion para Φ se tiene s(t0) = X0 y, por la segunda condicion,para t ≥ t1 ≥ t0 vale
s(t) = Φ(t, t0, X0) = Φ(t, t1,Φ(t1, t0, X0)) = Φ(t, t1, s(t1)).
Ya que hablamos de tautologıas, veamos tambien un resultado mas o menosesperable de unicidad, que dice que dos soluciones que coinciden en un puntoson iguales a partir de allı. Esto refleja el hecho de que dos trayectorias no sepueden ‘cruzar’ en el espacio de estados.
Proposicion 9.1 Sean s1, s2 : I → E soluciones tales que s1(t0) = s2(t0) paracierto t0 ∈ I. Entonces s1(t) = s2(t) para todo t ≥ t0.
70

Demostracion:El resultado es evidente a partir de la definicion, pues para t ≥ t0 vale
s1(t) = Φ(t, t0, s1(t0)) = Φ(t, t0, s2(t0)) = s2(t).
A diferencia del caso de los sistemas dinamicos, para los cuales la propiedad
anterior vale para todo t, puede ocurrir que dos soluciones diferentes coincidanrecien a partir de cierto t0: en otras palabras, la unicidad vale unicamente haciala derecha. A modo de ejemplo sencillo, consideremos la ecuacion
x′(t) = f(|x(t− τ)|)
con f localmente Lipschitz y φ ∈ C([−τ, 0],R) no nula tal que φ(0) = 0. Clara-mente las soluciones con condicion inicial φ y −φ para t = 0 son iguales a partirde t = 0, de modo que los respectivos estados Φ(t, 0, φ) y Φ(t, 0,−φ) coincidenpara todo t ≥ τ . 17
En lo que sigue nos veremos algunas propiedades basicas de los sistemasautonomos, que formalmente se definen como aquellos que cumplen la propiedad
Φ(t, t0, X0) = (t+A, t0 +A,X0)
para todo A. Lo que esto refleja, simplemente, es el hecho de que Φ se puedepensar directamente como funcion de las variables t y X0 ya que, como antes,Φ(t, t0, X0) = Φ(t − t0, 0, X0). Los sistemas autonomos quedan caracterizadospor medio del siguiente resultado:
Proposicion 9.2 Φ es autonomo si y solo si para toda s : I → E solucion ytodo A vale que s(t+A) es solucion en el intervalo I −A := t−A : t ∈ I.
Demostracion:⇒) Sea s solucion y v(t) := s(t+ A), entonces para t0 ∈ I − A fijo y t ≥ t0
valeΦ(t, t0, v(t0)) = Φ(t+A, t0 +A, v(t0))
= Φ(t+A, t0 +A, s(t0 +A)) = s(t+A) = v(t),
de donde se concluye que v es solucion.⇐) Consideremos, para X ∈ E, t0 y A fijos, la funcion s(t) := Φ(t, t0+A,X).
Si para cualquier t llamamos t := t + A, entonces s(t0) = Φ(t0, t0 + A,X) =Φ(t0, t0, X) = X y en consecuencia
Φ(t, t0, s(t0)) = Φ(t, t0, X) = s(t).
17Aunque a esta altura sea evidente, no esta de mas recalcar la diferencia entre esta situaciony la que planteamos desde el comienzo: a diferencia del caso sin retardo, dos ‘soluciones’ deuna ecuacion con retardo se pueden cruzar. Esto lo vimos con ejemplos tan basicos comoel problema lineal x′(t) = −x
(t− π
2
). Lo que no puede ocurrir es que se crucen (hacia la
derecha) las trayectorias en el espacio de estados.
71

Esto prueba que s es solucion, lo que implica que v(t) = s(t + A) es solucion.Ademas, v(t0) = s(t0 +A) = X, de modo que
Φ(t+A, t0 +A,X) = s(t+A) = v(t) = Φ(t, t0, v(t0)) = Φ(t, t0, X).
Esto muestra que Φ es autonomo.
A partir de ahora, nos ocuparemos unicamente de sistemas autonomos, a loscuales, de acuerdo con la observacion previa, escribiremos directamente comofunciones (continuas) de las variables t ≥ 0 y X ∈ E. Las dos condiciones quevimos se pueden reformular de la siguiente manera:
1. Φ(0, X) = X para todo X ∈ E.
2. Φ(t,Φ(t0, X)) = Φ(t+ t0, X) para todo X ∈ E, y t, t0 ≥ 0.
Como se trata de sistemas semi-dinamicos, las orbitas o trayectorias siemprevan a ser positivas: dado X ∈ E, definimos
O+(X) = Φ(t,X) : t ≥ 0.
Un punto de equilibrio es simplemente una solucion constante, vale decir,cierto e ∈ E tal que Φ(t, e) = e para todo t ≥ 0. Esto equivale a decir queO+(e) = e.
Pero hay otros casos de orbitas con propiedades especiales. Por ejemplo:sin llegar al extremo de ser constante, la orbita de un cierto X ∈ E puedeacercarse asintoticamente a cierto lımite Y (en ese caso: ¿sera necesariamenteun equilibrio? Por el momento, la respuesta queda como ejercicio). Mas engeneral, los puntos lımite de X se definen como aquellos Y ∈ E para los cualesexiste alguna sucesion tn → +∞ tal que Φ(tn, X)→ Y . Esto ocurre por ejemplocon las trayectorias periodicas, vale decir, tales que
Φ(t+ T,X) = Φ(t,X)
para cierto T > 0 y todo t ≥ 0. Si no son constantes, no convergen a ningunvalor pero pasan infinitas veces por cada uno de sus estados.
El conjunto de puntos lımite para un cierto X se llama ω-lımite, es decir:
ω(X) := Y ∈ E : Φ(tn, X)→ Y para alguna sucesion tn → +∞.
En otras palabras,
ω(X) =⋂s>0
Φ(t,X) : t > s.
Es claro que este conjunto puede ser vacıo, como ocurre por ejemplo con aquellastrayectorias en Rn que tienden a infinito. En cambio, si una trayectoria en Rnse mantiene acotada, necesariamente hay puntos lımites. Sin embargo, para queesto valga en el caso general es preciso pedir una condicion de compacidad.
Si una orbita es periodica, el ω-lımite coincide con O+(X): en efecto, dadoY = Φ(t0, X) se verifica que Y = Φ(tn, X) para tn := t0 + nT → +∞, lo que
72

muestra que O+(X) ⊂ ω(X). Para la inclusion recıproca, basta observar queO+(X) es compacto, pues es la imagen de la funcion continua Φ(·, X) sobre elintervalo [0, T ]. Luego, cualquier punto Y /∈ O+(X) se encuentra a distanciapositiva de dicho conjunto y, por consiguiente, no puede ser punto lımite. Estoimplica (nuevamente, una tautologıa) que para Y ∈ ω(X) vale Φ(t, Y ) ∈ ω(X)para todo t ≥ 0. Esto dice que el ω-lımite es un conjunto ‘invariante’, en unsentido que vamos a definir con mayor precision:
Definicion 9.2 Dado C ⊂ E, diremos que:
1. C es positivamente invariante si O+(X) ⊂ C para todo X ∈ C.
2. C es invariante si Φ(t, C) = C para todo t ≥ 0.
Claramente, la segunda definicion es mas restrictiva que la primera; mas pre-cisamente, C es invariante si y solo si es positivamente invariante y, ademas,la funcion Φ(t, ·) : C → C es suryectiva para todo t ≥ 0 (es decir, para todoY ∈ C y todo t ≥ 0 existe X ∈ C tal que Φ(t,X) = Y ). Esto es lo queefectivamente ocurre con el ω-lımite si la trayectoria es periodica: no solamenteΦ(t, ω(X)) ⊂ ω(X) para todo t ≥ 0, como ya dijimos (lo que implica que espositivamente invariante) sino que ademas, para todo Y ∈ ω(X) y todo t ≥ 0existe Z ∈ ω(X) tal que Φ(t, Z) = Y . Pero vimos que ω(X) = O+(X), ası quela cuestion se reduce a probar que para todo t0 ≥ 0 y todo t ≥ 0 existe s ≥ 0tal que
Φ(t,Φ(s,X)) = Φ(t0, X).
Por la propiedad 2 de los sistemas semi-dinamicos, esto equivale directamentea encontrar s tal que
Φ(t+ s,X) = Φ(t0, X),
de modo que la periodicidad nos permite encontrar no uno sino infinitos valoresde s: alcanza con tomar s = t0−t+nT para cualquier n suficientemente grande.
Una vez asimilado el anterior razonamiento, corresponde anunciar que no setrataba mas que un ejercicio, pues en realidad el resultado se deduce de esteotro, mucho mas general:
Teorema 9.1 Dado X ∈ E se cumple:
1. ω(X) es cerrado y positivamente invariante.
2. Si O+(X) es compacto, entonces ω(X) es no vacıo, compacto, invariantey conexo. Ademas,
dist(Φ(t,X), ω(X))→ 0 para t→ +∞.
Cabe aclarar que dist denota aquı la distancia de un punto a un conjunto.Formulada de otra manera, la ultima propiedad expresa el siguiente hecho: paratodo ε > 0 existe T > 0 tal que si t ≥ T entonces existe Y ∈ ω(X) de modo
73

que d(Φ(t,X), Y ) < ε (ahora sı, d es la distancia de nuestro espacio metrico E).Por comodidad, escribiremos directamente: Φ(t,X)→ ω(X).
Demostracion del teorema:Sea Y ∈ ω(X), entonces existe tn → +∞ de modo tal que Φ(tn, X) → Y .
Por continuidad, para todo t vale
Φ(t,Φ(tn, X))→ Φ(t, Y )
pero, ademas, por definicion sabemos que Φ(t,Φ(tn, X)) = Φ(t+ tn, X). Comot+ tn → +∞, se deduce que Φ(t, Y ) ∈ ω(X). Esto prueba que O+(Y ) ⊂ ω(X),es decir: ω(X) es positivamente invariante. Supongamos ahora que Yn ∈ ω(X)verifica Yn → Y y tomemos:
• t1 > 1 tal que d(Φ(t1, X), Y1) < 1,
• t2 > maxt1, 2 tal que d(Φ(t2, X), Y2) < 12
y luego, inductivamente,
• tn > maxtn−1, n tal que d(Φ(tn, X), Yn) < 1n .
Se verifica entonces que Φ(tn, X) converge al valor Y . Ademas, tn → +∞, asique Y ∈ ω(X). Esto prueba que el ω-lımite es cerrado.
Para la segunda parte, supongamos que la orbita O+(X) es precompacta yconsideremos cualquier sucesion tn → +∞. Se deduce que Φ(tn, X) tiene algunasubsucesion convergente, lo que muestra que ω(X) 6= ∅. Ademas, es claro queω(X) ⊂ O+(X), ası que resulta compacto.
Para probar la invariancia, fijemos Y ∈ ω(X) y t0 > 0. Queremos hallarZ ∈ ω(X) tal que Φ(t0, Z) = Y (dejamos de lado el caso t0 = 0 porque estrivial). Consideremos tn → +∞ tal que Φ(tn, X) → Y . Como la sucesionΦ(tn− t0, X) esta acotada, podemos suponer que converge a cierto Z. Entoncesvale:
Φ(t0,Φ(tn − t0, X)) = Φ(tn, X)→ Y.
Usando ahora la continuidad de Φ concluimos que Φ(t0, Z) = Y .A continuacion, veamos que Φ(t,X) → ω(X). En caso contrario, existen
ε > 0 y tn → +∞ tales que d(Φ(tn, X), ω(X)) ≥ ε. Nuevamente, por lacompacidad podemos suponer que Φ(tn, X) converge a cierto Y ∈ ω(X); luegod(Y, ω(X)) ≥ ε, lo que es absurdo.
Para finalizar, supongamos que ω(X) se puede escribir como la union dis-junta de dos conjuntos cerrados A y B. Como son compactos, podemos fijarε > 0 tal que d(Y, Z) > 2ε para todo Y ∈ A y todo Z ∈ B. Por lo anterior,existe T tal que dist(Φ(t,X), ω(X)) < ε para todo t ≥ T y, en consecuencia,para cada t ≥ T podemos elegir W (t) ∈ ω(X) tal que d(Φ(t,X),W (t)) < ε.Consideremos los conjuntos
IA := t ≥ T : W (t) ∈ A, IB := t ≥ T : W (t) ∈ B
74

que son claramente disjuntos y vale IA ∪ IB = [T,+∞). Si tn ⊂ IA esuna sucesion que converge a cierto t, entonces Φ(tn, X) → Φ(t,X) y, tomandouna subsucesion, podemos suponer que W (tn) converge a cierto W ∈ A. Estoprueba que dist(Φ(t,X), A) ≤ ε y entonces dist(Φ(t,X), B) > ε; en particular,W (t) ∈ A. De la misma forma se ve que IB es cerrado, de modo que alguno deambos conjuntos, por ejemplo IB , es vacıo. Esto dice que dist(Φ(t,X), B) ≥ εpara todo t ≥ T , de modo que B no contiene puntos lımites. Esto nos permiteconcluir que B es vacıo y, en definitiva, que ω(X) es conexo.
En particular, el resultado previo permite obtener conclusiones para el (semi)flujo Φ asociado a una ecuacion con retardo
X ′(t) = F (Xt)
con F localmente Lipschitz. Por conveniencia, podemos escribir
Φ(t, φ) = Xt(φ)
y entonces el ω-lımite de cierta φ ∈ C([−τ, 0],Rn) esta dado por
ω(φ) = ψ ∈ C([−τ, 0],Rn) : ‖Xtn(φ)− ψ‖∞ → 0 para ciertos tn → +∞.
Como vimos, a diferencia del caso sin retardo, puede ocurrir que ω(φ) sea vacıoaunque la orbita O+(φ) sea acotada. Por eso, es habitual asumir la condicionde que F sea un operador compacto, pues permite garantizar que las orbitasacotadas son precompactas. En efecto, si existe una constante M tal que‖Xt(φ)‖∞ ≤ M para todo t, entonces existe C tal que vale, para X = X(t, φ),que ‖X ′(t)‖ = ‖F (Xt)‖ ≤ C para todo t. Esto dice que el conjunto O+(φ) esequicontinuo y, por el teorema de Arzela-Ascoli, su clausura es compacta.18
Otra propiedad inmediata es que si una solucion de la ecuacion convergepara t→ +∞ a cierto c ∈ Rn, entonces dicho c es necesariamente una solucionconstante, vale decir, lo que habitualmente llamamos ‘punto de equilibrio’. Si-como siempre- ignoramos el isomorfismo entre Rn y el subespacio de funcionesconstantes de C([−τ, 0,Rn), podemos verificar directamente que c es un puntode equilibrio, en el sentido que vimos unas paginas atras:
Proposicion 9.3 Si X(t, φ)→ c para t→ +∞ entonces O+(c) = c.
Demostracion:Dado ε > 0 fijamos t0 tal que ‖X(t, φ) − c‖ < ε para todo t > t0; luego,
‖Xt(φ)− c‖∞ < ε para todo t > t0 + τ . Se deduce que Xt(φ)→ c en el espacioC([−τ,Rn]), es decir, Φ(t, φ)→ c para t→ +∞. Luego ω(φ) = c y, como ω(φ)es invariante, resulta Φ(t, c) = c para todo t. Esto prueba que O+(c) = c, esdecir, que c es un equilibrio.
18Aunque se trata de algo evidente, vale la pena aclarar que O+(φ) es acotada si y solo siel conjunto X(t, φ) : t ≥ 0 es acotado en Rn.
75

Entre otras cosas, el ω-lımite sirve para estudiar la estabilidad asintotica deun equilibrio. Por empezar, la condicion de estabilidad se traduce de maneraautomatica de la siguiente forma: para todo ε > 0 existe δ > 0 tal que si‖φ − e‖ < δ entonces ‖Φ(t, φ) − e‖∞ < ε para todo t ≥ 0 o, equivalentemente,O+(φ) ⊂ Bε(e). Una vez que sabemos esto, si ademas asumimos que F escompacta, entonces e es (localmente) asintoticamente estable si existe r > 0 talque ω(φ) = e para toda φ ∈ Br(e).
En efecto, si e es asintoticamente estable, entonces existe r > 0 tal que paratodo φ ∈ Br(e) se cumple que X(t, φ) → e para t → ∞. Como vimos en lademostracion previa, esto implica que Φ(t, φ)→ e para t→ +∞; en particular,ω(φ) = e. Recıprocamente, supongamos que ω(φ) = e para toda φ ∈ Br(e).Por la estabilidad, podemos suponer tambien que O+(φ) es acotada. Si existesn → +∞ tal que ‖Φ(sn, φ)− e‖∞ ≥ ε > 0 para cierto ε > 0, entonces tomandouna subsucesion, podemos suponer que Φ(sn, φ) converge a cierta ψ 6= e. Pordefinicion, resulta ψ ∈ ω(φ), lo que es absurdo. Esto prueba que Φ(t, φ) → epara t→ +∞; en consecuencia, toda solucion con dato inicial φ ∈ Br(e) tiendeal equilibrio e cuando t→ +∞.
A modo de ejemplo, consideremos la ecuacion logıstica
N ′(t) = N(t)(1−N(t− τ)),
cuyos equilibrios son 0 y 1. Si N0 = φ ≥ 0, es inmediato verificar que la solucionesta definida para todo t ≥ −τ y se mantiene siempre mayor o igual que 0. Enefecto, observemos en primer lugar que si φ(0) > 0 entonces N(t) > 0 para todot ≥ 0, lo cual se deduce, por ejemplo, integrando directamente la ecuacion:
N(t) = N(0)e∫ t0
(1−N(s−τ)) ds. (24)
Esta ultima expresion tambien muestra que si φ(0) = 0, entonces N ≡ 0 a partirde t = 0, de modo que el resultado queda probado.19
Por otra parte, la misma idea permite mostrar, segun el metodo de pasos,que la solucion esta globalmente definida: una vez que conocemos N(t) parat ≤ nτ , la formula
N(t) = N(nτ)e∫ tnτ
(1−N(s−τ)) ds
permite extenderla hasta (n + 1)τ y ası sucesivamente.20 Mas aun, el compor-tamiento asintotico de la solucion se puede analizar a partir de las siguientesobservaciones elementales:
1. Si N ≥ 1 a partir de cierto t0, entonces N ′ ≤ 0 a partir de t0 + τ y enconsecuencia converge, para t → +∞, a cierto lımite. De acuerdo con laProposicion 9.3, dicho lımite es un punto de equilibrio de donde se deduceque N(t) 1 para t → +∞ (obviamente, podemos afirmar que decrecerecien a partir de t0 + τ).
19Esto proporciona otro ejemplo de soluciones que se ‘unifican’ a partir de cierto valor: noimporta cual sea φ, la condicion φ(0) = 0 basta para garantizar que O+(φ) = 0.
20Este hecho no deberıa sorprender, pues el termino de la derecha de la ecuacion es unafuncion lineal respecto de N (ver ejercicio 2 de la seccion 7).
76

2. Si N ≤ 1 a partir de cierto t0, entonces N ′ ≥ 0 a partir de t0 + τ y setienen dos opciones:
• φ(0) = 0 y N(t) = 0 para t ≥ 0.
• φ(0) > 0 y N(t) 1 para t→ +∞.
3. Si no ocurre ninguna de las situaciones anteriores, N entonces oscilaalrededor de 1. Veamos que en este caso, una vez que cruza dicho valor,no puede llegar demasiado alto: concretamente, si N(t0) = 1 para ciertot0, entonces N(t) ≤ eτ para todo t ≥ t0. Para ver esto, supongamosque N(t∗) > 1 para cierto t∗ > t0 y tomemos t1 < t∗ < t2 tales queN(t1) = N(t2) = 1 y N > 1 en (t1, t2). Llamando tmax al valor dondeN alcanza su maximo en dicho intervalo, del hecho de que N ′(tmax) = 0deducimos que N(tmax− τ) = 1 y, por lo tanto, tmax− τ ≤ t1. Integrandocomo en la formula (24) pero ahora a partir de t1, obtenemos
N(t∗) ≤ N(tmax) = N(t1)e∫ tmaxt1
(1−N(s−τ)) ds ≤ etmax−t1 ≤ eτ .
En definitiva, en los tres casos concluimos que, para cualquier φ ≥ 0, la orbitaO+(φ) es acotada y ω(φ) es no vacıo.
Lo visto hasta ahora alcanza sacar conclusiones respecto del equilibrio trivial:si φ(0) = 0 entonces N = 0 a partir de t = 0 y obviamente ω(φ) = 0. Pero,en cambio, si φ(0) > 0 el segundo de los casos anteriores nos dice que el valor deN(t) no puede ser ‘chico’ para todo t ≥ 0, ası que 0 es un equilibrio inestable.21
Esto es consistente con el hecho de que la linealizacion en 0 da por resultado laecuacion N ′(t) = N(t), para la cual el origen es inestable. En rigor, se puedeprobar que 0 no puede ser punto lımite de ninguna φ tal que φ(0) > 0; mas aun,existe una constante c > 0 independiente de φ tal que
lim inft→+∞
N(t, φ) ≥ c.
Para ver esto, en virtud de los casos anteriores solo hay que encontrar una cotainferior (a partir de algun t1, no importa cual) para aquellas soluciones queoscilan alrededor de 1. Como antes, si para t1 < t2 vale N < 1 en (t1, t2) yN(t1) = N(t2) = 1 entonces el valor mınimo en dicho intervalo se alcanza encierto tmin ≤ t1 + τ y, agrandando t1 si hace falta, podemos suponer N(t) ≤ eτpara todo t ≥ t1 − τ . De esta forma, obtenemos:
N(tmin) = N(t1)e∫ tmint1
(1−N(s−τ)) ds ≥ e(tmin−t1)(1−eτ ) ≥ eτ(1−eτ ).
Sin embargo, el analisis del otro punto de equilibrio es mas delicado. Siocurre alguno de los primeros dos casos, es claro que ω(φ) = 1, pero no esfacil ver lo que ocurre con aquellas soluciones que oscilan alrededor de 1. Laecuacion linealizada es ahora
u′(t) = −u(t− τ)
21Y mucho menos asintoticamente, ya que ninguna solucion tiende a 0.
77

que -como sabemos- es asintoticamente estable para τ < π2 e inestable para
τ > π2 . En consecuencia, para τ < π
2 sabemos que hay estabilidad asintotica,aunque pero solamente local. Por supuesto, no se puede probar que 1 es unatractor global, ya que existe otro equilibrio al que obviamente no puede ‘atraer’.Pero, como vimos en las primeras paginas, en el caso sin retardo es inmediatoverificar que todas las soluciones con un valor inicial N(0) > 0 convergen a 1,de modo que es razonable pensar que cuando el retardo es chico esta propiedadse mantiene. Vamos a probar, en efecto, que si τ ≤ 1 entonces 1 es atractorpara todas las soluciones con condicion inicial φ ≥ 0 tal que φ(0) > 0.
Para ello, observemos en primer lugar que las cotas anteriores pueden mejo-rarse de manera iterativa. Supongamos que N oscila alrededor del 1 y yasabemos que vale α < N(t) < β a partir de cierto valor s. Entonces, parat2 > t1 > s + τ tales que N(t1) = N(t2) = 1 y N 6= 1 en (t1, t2) consideramoslos valores tmax y tmin como antes y obtenemos
N(tmax) ≤ e∫ tmaxt1
(1−N(s−τ)) ds ≤ eτ(1−α)
N(tmin) ≥ e∫ tmint1
(1−N(s−τ)) ds ≥ eτ(1−β).
Esto nos motiva a definir la funcion g(x) := eτ(1−x) a fin de obtener la siguiente‘regla inductiva’:
• Si α < N(t) < β a partir de cierto s, entonces g(α) < N(t) < g(β) a partirde cierto t.
En particular, las cotas que calculamos antes dicen que podemos comenzarcon cierto s1 y los valores α = eτ(1−eτ ), β = eτ . Y al parecer es nuestro dıa desuerte, ya que vale β = g(0) y α = g(β) = g(g(0)), lo que nos permite formularnuestra iteracion de manera muy elegante.
En efecto, vale que g2(0) < N(t) < g(0) para t > s1 e inductivamenteconcluimos que existen s2 < s3 < . . . tales que
g2n(0) < N(t) < g2n−1(0) (25)
para t > sn. En resumen, tenemos: ¡un sistema dinamico discreto! La funciong es decreciente y positiva, luego g2 = g g es estrictamente creciente y vale
0 < g2(0) < g4(0) < . . .
g(0) > g3(0) > g5(0) > . . .
De aquı se deduce que la sucesion g2n−1(0) converge a cierto lımite L y luegog2n(0) converge al valor g(L). Observemos, ademas, que g(0) > 1 = g(1), lo cualimplica que g2n(0) < 1 < g2n−1(0) para todo n. En particular, g(L) ≤ 1 ≤ L.Por otra parte, tanto L como g(L) tienen que ser puntos fijos de g2, ya que
L = limn→∞
g2n+1(0) = limn→∞
g2(g2n−1(0)) = g2(L)
78

yg2(g(L)) = g(g2(L)) = g(L).
En lo que sigue, vamos a ver que si τ ≤ 1 entonces el unico punto fijo de g2 es1, lo que prueba, de acuerdo con (25), que N(t)→ 1 para t→ +∞.
En efecto, x > 0 es punto fijo de g2 si y solo si g(g(x)) = x, lo que equivalea decir que g(x) = g−1(x), o bien:
eτ(1−x) = 1− lnx
τ.
Consideremos la funcion ϕ(x) := eτ(1−x) + ln xτ y observemos que ϕ(0+) = −∞,
ϕ(+∞) = +∞. Ademas, vale ϕ′(x) = 0 si y solo si
τxe−τx = e−τ .
El termino de la izquierda es siempre menor o igual que 1e , de modo que ϕ
es estrictamente creciente para τ ≤ 1. En consecuencia, ϕ toma el valor 1exactamente una vez, vale decir, g2 no tiene otros puntos fijos ademas de x = 1.
Grafico de g y las iteradas gk(0) para τ = 1.
Es claro que la cuenta anterior con la g no permite mejorar el valor de τ , yaque para τ > 1 se verifica que ϕ′(1) < 0 y entonces ϕ cruza la recta horizontaly = 1 al menos tres veces. Sin embargo, acotando con mas cuidado los anterioresvalores N(tmax) y N(tmin), se puede ver que la restriccion que impusimos paraτ es excesiva. En rigor, el resultado vale para τ < 3
2 y se ha conjeturado que sepuede extender ‘un poquito mas’, hasta el valor que surge de la linealizacion, esdecir: τ < π
2 .
79

9.1 Sistemas monotonos
En esta seccion vamos a seguir estudiando algunas propiedades (semi)dinamicasdel sistema autonomo
X ′(t) = F (Xt)
con F localmente Lipschitz. Especıficamente, nos vamos a ocupar de un casoparticular, los llamados sistemas monotonos, en los cuales el espacio de estadosE es un conjunto ordenado (es decir, tiene definida una relacion ≤ reflexiva,antisimetrica y transitiva) y el (semi)flujo preserva el orden:
X ≤ Y ⇒ Φ(t,X) ≤ Φ(t, Y ) para todo t.
Si E es metrico, se pide que el orden sea compatible con la metrica), es decir:
Xn → X,Yn → Y,Xn ≤ Yn ⇒ X ≤ Y.
Finalmente, si E es normado se pide tambien que el orden sea compatible conla estructura de espacio vectorial:
X ≤ Y ⇒ cX + Z ≤ cY + Z ∀ c ≥ 0, Z ∈ E.
En este ultimo caso, el orden viene inducido por un cono cerrado, vale decir, unconjunto cerrado K ⊂ E tal que
1. K +K ⊂ K.
2. K ∩ −K = 0.
3. K es convexo.
En efecto, si (E,≤) es un espacio normado ordenado, entonces el conjunto depositividad K := X ∈ E : X ≥ 0 es un cono, pues:
1. Si X,Y ≥ 0, entonces X + Y ≥ 0.
2. Si X ≥ 0 y −X ≥ 0, entonces X ≥ 0 ≥ X, lo que implica X = 0.
3. Si X,Y ≥ 0 y s ∈ [0, 1], entonces sX + (1− s)Y ≥ 0.
Finalmente, si Xn ≥ 0 y Xn → X, entonces la compatibilidad dice que X ≥ 0.Recıprocamente, si K es un cono cerrado de un espacio normado E, queda comoejercicio verificar que la relacion
X ≤ Y ⇔ Y −X ≥ 0
define un orden compatible. Por supuesto, en el caso de E = C([−τ, 0],R) setiene el orden compatible usual
φ ≤ ψ sii φ(t) ≤ ψ(t) para todo t.
Para funciones vectoriales, lo usual es considerar ademas el orden coordenada acoordenada, pero nos limitaremos aquı a considerar el caso escalar.
80

Un ejemplo tıpico de sistema semi-dinamico monotono discreto esta dadopor las iteraciones de una cierta funcion continua T : E → E creciente, valedecir, que cumple: X ≤ Y ⇒ T (X) ≤ T (Y ). En tal caso, existe una forma deprobar la existencia de un punto fijo de T por el llamado metodo de super ysubsoluciones. Cuando E = R el metodo no es otra cosa que una version delteorema de Bolzano: supongamos que existen α < β tales que
T (α) ≥ α, T (β) ≤ β,
entonces T tiene al menos un punto fijo en el intervalo [α, β]. En efecto, bastaconsiderar la funcion continua f(x) := x−T (x), que verifica f(α) ≤ 0 ≤ f(β) yen consecuencia se anula. Esto no es ninguna novedad, aunque desde el puntode vista dinamico es un poco mas interesante analizar lo que ocurre al calcularla orbita positiva Tn(x) : n ≥ 0 de cualquier x ∈ [α, β]. Si x es un puntofijo, entonces O+(x) = x; en caso contrario, observemos que de todas formasT (x) ∈ [α, β]; en otras palabras, el intervalo [α, β] es invariante. Esto se debesimplemente al hecho de que, como α ≤ x ≤ β, entonces
α ≤ T (α) ≤ T (x) ≤ T (β) ≤ β.
Este hecho vuelve a mostrar, por si no estabamos seguros, que T tiene un puntofijo (esta vez por el teorema de Brouwer). Pero ademas permite probar que lasorbitas son monotonas: si por ejemplo T (x) < x entonces Tn+1(x) ≤ Tn(x) paratodo n. Luego, Tn(x) converge necesariamente a un punto fijo xf de T . Paradar una muestra de nuestros multiples recursos expresivos, podemos decirlo deotra forma: ω(x) = xf. Lo mismo ocurre si T (x) > x, en ese caso Tn(x)converge tambien a un punto fijo, pero de manera creciente.
Por supuesto, cuando trabajamos en espacios mas generales la vida dejade ser tan sencilla (por mas que siga siendo una vida monotona). Entoncesconviene entender mejor cuales fueron los pasos que nos llevaron, en el ejemploprevio, a un exito tan rotundo.
La situacion es la siguiente: tenemos un espacio normado E, provisto de unorden compatible, una funcion continua T : E → E creciente y, ademas, unasub y una supersolucion ordenadas, es decir, ciertos α ≤ β tales que α ≤ T (α)y β ≥ T (β). Entonces se prueba, como antes, que el intervalo [α, β] formadopor los elementos x ∈ E tales que α ≤ x ≤ β es invariante. Sin embargo, comoera de esperar, eso no alcanza para asegurar la existencia de un punto fijo. Ytampoco vale la propiedad que usamos para el caso unidimensional, ya que elorden no tiene por que ser total y, en consecuencia, no vale necesariamente quesi T (x) 6= x entonces es mayor o menor que x. En particular, la propiedadno vale el espacio C([−τ, 0]) que -no es inoportuno recordarlo- es el que nosinteresa. Ası que en general no resulta siempre tan facil calcular la orbita decualquier x. Pero, ¿que ocurre si empezamos en α o β? Justamente, la propiadefininicion nos brinda el puntapie inicial; alterando un poco el verso de Valerypodemos decir: y todo el resto es induccion. Seamos mas o menos poeticos, lamonotonıa se obtiene igual que antes:
α ≤ T (α) ≤ T 2(α) ≤ · · · ≤ β
81

β ≥ T (β) ≥ T 2(β) ≥ · · · ≥ α.
Si pudieramos asegurar que estas sucesiones convergen, entonces estarıamoshechos: como siempre, la continuidad de T garantiza que los respectivos lımitesson puntos fijos. Sin embargo, las sucesiones acotadas no tienen por que serconvergentes... y la cosa es incluso peor: ¡no sabemos si las anteriores sucesionesson acotadas!
Esto ultimo no debe alarmar: se debe al simple hecho de que una ‘cota’ en elsentido del orden no implica necesariamente una cota en el sentido de la norma.Para poder afirmar algo ası no basta con la compatibilidad, sino que debemospedir una condicion extra:
Definicion 9.3 Sea (E,≤) un espacio normado ordenado. El orden ≤ se dicenormal sii existe una constante c > 0 tal que
0 ≤ X ≤ Y ⇒ ‖X‖ ≤ c‖Y ‖.
Por ejemplo, para E = C([−τ, 0]) la condicion se cumple, con c = 1: en efecto,si 0 ≤ φ(t) ≤ ψ(t) para todo t, entonces ‖φ‖∞ ≤ ‖ψ‖∞.
Si asumimos normalidad (no la nuestra, sino la del orden), entonces es facilprobar que las sucesiones anteriores estan acotadas. Por ejemplo, a partir delas desigualdades
α ≤ Tn(α) ≤ β
deducimos que0 ≤ Tn(α)− α ≤ β − α
y entonces ‖Tn(α)− α‖ ≤ c‖β − α‖, lo que a su vez implica:
‖Tn(α)‖ ≤ ‖α‖+ c‖β − α‖.
Tenemos entonces sucesiones acotadas; ¿como hacemos para garantizar laconvergencia? Todo parece indicar que una buena hipotesis es que T sea com-pacto: al menos eso garantiza (como siempre, por Schauder) que hay puntosfijos, pues T ([α, β]) ⊂ [α, β] y el intervalo [α, β] es convexo.22 Pero volviendoa nuestras sucesiones, la tarea no esta terminada, pues la compacidad solo nosgarantiza, en principio, que existe alguna subsucesion convergente. Sin em-bargo, la monotonıa alcanza para ‘ensanguchar’ (expresion proveniente del vo-cablo ‘sanguchito’) los restantes terminos de la siguiente manera:
Lema 9.4 Si Xn es monotona y existe una subsucesion Xnj que convergea cierta X, entonces Xn → X.
Demostracion:
22Queda como ejercicio para el lector probar esto de manera directa, tomando X,Y ∈ [α, β]y verificando que α ≤ sX + (1− s)Y ≤ β para todo s ∈ [0, 1]. Pero el resultado es todavıa esmas inmediato si se observa que [0, β − α] ⊂ K.
82

Supongamos que la sucesion es creciente, entonces escribiendo
X = Xnj +
∞∑k=j
(Xnk+1−Xnk)
deducimos (pues el cono positivo K es cerrado) que X ≥ Xnj . Ahora, paracada n definimos j(n) como el unico tal que nj(n) ≤ n < nj(n)+1, de donde seobtiene
0 ≤ Xn −Xnj(n)≤ Xnj(n)+1
−Xnj(n)→ 0.
Usando otra vez la normalidad, concluimos que Xn−Xnj(n)→ 0 y, en definitiva:
Xn → X.
Observacion 9.1 Cabe aclarar que la anterior condicion de compacidad es su-ficiente pero no indispensable: por ejemplo, el metodo tambien funciona en al-gunos casos de problemas casi- periodicos, para los cuales los operadores asoci-ados no son compactos. Sin embargo, esto requiere en general alguna condicionextra (ver por ejemplo [6]. Cabe mencionar que la perdida de compacidad sedebe al hecho, curioso para el lector desprevenido, de que en el espacio de fun-ciones casi-periodicas el teorema de Arzela-Ascoli tiene una hipotesis adicionala las dos habituales, justamente de equi-casi-periodicidad. Para mas detalles,ver [2]).
A modo de ejemplo, consideremos la ecuacion
x′(t) = f(t, x(t), x(t− τ)) (26)
con f continua y T -periodica en t. Como dijimos algunas paginas atras, elproblema de encontrar soluciones T -periodicas es resonante, pues el operadorx 7→ x′ tiene nucleo no trivial (las funciones constantes). Una manera de evitaresto consiste en sumar un termino ax(t) de ambos lados, donde a es por ejemplouna constante positiva. En tal caso, sabemos ya (ver ejercicio 6 de la seccionprevia) que el operador L : CT ∩C1 → CT dado por Lx := x′+ax es biyectivo yel siguiente lema, interpretado adecuadamente, prueba que el operador inversode L es creciente.
Lema 9.5 Sea a > 0 y sea x una funcion T -periodica de clase C1 tal quex′(t) + ax(t) ≥ 0 para todo t. Entonces x ≥ 0.
Demostracion:Como x es periodica, alcanza su mınimo absoluto en cierto valor t0. Entonces
ax(t0) ≥ 0, lo que prueba que x ≥ 0.
A partir de este lema, resulta sencillo transformar la ecuacion anterior en unproblema de punto fijo y encontrar condiciones para que el operador involucradosea monotono. En efecto, al igual que en la seccion 8.1, para y ∈ CT fijadefinimos x := T y como la unica solucion T -periodica de
x′(t) + ax(t) = f(t, y(t), y(t− τ)) + ay(t)
83

es decir,x = L−1N(y)
con L como antes y N : CT → CT dado por N(y)(t) := f(t, y(t), y(t−τ))+ay(t).Buscamos un punto fijo de T = L−1N , que (como ya vimos, aunque quizas dichode otra forma) resulta compacto.
Llego la hora de preguntarse por la monotonıa: ¿que quiere decir que Tsea creciente? El lema previo dice que si φ ≥ 0 entonces L−1(φ) ≥ 0 lo cual,por linealidad, significa que si φ ≤ ψ entonces L−1(φ) ≤ L−1(ψ). Luego, unaposible hipotesis es que el operador N (la N es por no-lineal, pero tambien porNemitskii) sea tambien creciente, es decir: si y(t) ≤ z(t) para todo t, entoncesf(t, y(t), y(t− τ)) + ay(t) ≤ f(t, z(t), z(t− τ)) + az(t) para todo t.
Esto ultimo es, claramente, mucho pedir... aunque una idea ‘salvadora’ vieneen nuestra ayuda: en realidad, no hace falta pedir eso en todo el espacio CT ,sino solamente en el subconjunto [α, β], donde α ≤ β son, respectivamente, unasub y una supersolucion, es decir, tales que
α ≤ T (α), β ≥ T (β).
Empleando una vez mas el lema, lo anterior se traduce simplemente al hecho deque α y β son T -periodicas y verifican
Lα ≤ N(α) Lβ ≥ N(β),
es decir:
α′(t) ≤ f(t, α(t), α(t− τ)), β′(t) ≥ f(t, β(t), β(t− τ))
para todo t. Notemos que el termino que contiene la constante a desaparece,porque se cancela, ası que tenemos libertad de elegirlo como mejor nos convenga.Con tal idea en mente, vamos a suponer (por ‘simplicidad’, como suele decirse)que f es de clase C1 en la segunda variable. En tal caso, es razonable pensarque si elegimos a > 0 suficientemente grande, la funcion x 7→ f(t, x, y) + ax vaa resultar creciente para t, y fijos. Esto se debe a que solo nos interesa mirar losvalores (t, x, y) que pertenecen al conjunto
C := 0 ≤ t ≤ T, α(t) ≤ x ≤ β(t)α(t− τ) ≤ y ≤ β(t− τ) ⊂ R3
que (¡gran noticia!) es compacto. En consecuencia, alcanza con tomar
a ≥ − max(t,x,y)∈C
∂f
∂x(t, x, y).
Para lograr crecimiento respecto de la tercera variable, no parece haber masremedio que pedirlo directamente:
y ≤ z ⇒ f(t, x, y) ≤ f(t, x, z)
para todos los t, x, y, z tales que (t, x, y), (t, x, z) ∈ C. De esta forma, tenemostodo lo que necesitabamos para garantizar la existencia de una solucion T -periodica del problema.
84

Por ejemplo, consideremos la ecuacion
x′(t) = a(t)x(t)3 + b(t)x(t− τ)
con a, b ∈ CT tales que b(t) > 0 > a(t) para todo t. En este caso, f(t, x, y) =a(t)x3 + b(t)y, que es de clase C1 respecto de x y ademas, como b > 0, escreciente respecto de la variable y.
Si elegimos α como la funcion constante dada por α := (inf b)1/2 > 0, valeque
α′ = 0 ≤ α(a(t)α2 + b(t)) = a(t)α3 + b(t)α
para todo t. Del mismo modo, fijando una constante β > α tal que β2 ≥ − b(t)a(t)
para todo t, resulta
β′ = 0 ≥ β(a(t)β2 + b(t)) = a(t)β3 + b(t)β
para todo t. Esto prueba que el problema tiene al menos una solucion T -periodica positiva (especıficamente, tal que α < x(t) < β para todo t).
Ejercicio: Verificar que el metodo tambien sirve si las desigualdades para
α y β estan invertidas, es decir
α′(t) ≥ f(t, α(t), α′(t− τ)), β′(t) ≤ f(t, β(t), β′(t− τ))
pidiendo ahora que f sea decreciente en la tercera coordenada.Sugerencia: Si a > 0 entonces se verifica, como antes, que el operador
Lx : x′ − ax es decreciente; luego, eligiendo a 0 el operador dado porNx(t) := f(t, x(t), x(t − τ)) − ax(t) es tambien decreciente y, en consecuen-cia, la composicion L−1N es creciente.
Mas alla del problema especıfico de existencia de soluciones periodicas, lacondicion de monotonıa permite estudiar de manera sencilla algunos aspectosgenerales de la dinamica de la ecuacion (26). Por simplicidad, supondremos quese trata de un problema autonomo
x′(t) = f(x(t), x(t− τ)) (27)
con f : R2 → R de clase C1 y creciente en su segunda coordenada, es decir:
∂f
∂y(x, y) ≥ 0
para todo (x, y) ∈ R2. La primera propiedad es que el semiflujo Φ es crecienteen su segunda coordenada:
Proposicion 9.4 Sea f como antes y supongamos φ ≤ ψ. Entonces para todot ≥ 0 vale xt(φ) ≤ xt(ψ).
85

Demostracion:De acuerdo con el metodo de pasos, alcanza con probar que
x(t, φ) ≤ x(t, ψ)
para todo t ∈ [0, τ ]. Si llamamos g(t, x) := f(t, x, φ(t)) ≤ f(t, x, ψ(t)) entoncespara x(t) := x(t, φ), y(t) := x(t, ψ) resulta
x′(t) = g(t, x(t)), y′(t) ≥ g(t, y(t))
y ademasx(0) ≤ y(0).
Supongamos en primer lugar que las anteriores desigualdades son estrictas yque ambas funciones se encuentran por primera vez en cierto valor t0, entoncesx′(t0) ≥ y′(t0). Pero
x′(t0) = g(t0, x(t0)) = g(t0, y(t0)) < y′(t0),
lo que es absurdo. Esto prueba que x(t) < y(t) para todo t. Para el caso general,consideremos h(t) := y′(t)− g(t, y(t)) ≥ 0 y llamemos yn a la unica solucion delproblema
z′(t) = g(t, z(t)) + h(t) +1
n
con condicion inicial z(0) = y(0) + 1n . Como
y′n(t) ≥ g(t, yn(t)) +1
n> g(t, yn(t))
y ademas yn(0) = y(0) + 1n > x(0), se deduce del caso estricto que yn(t) > x(t)
para todo t. Por continuidad, vale que yn(t) → y(t), de modo que y(t) ≥ x(t)para todo t.
La propiedad anterior es de utilidad para comparar la dinamica de (26) con
la de la ecuacion diferencial x′(t) = f(x(t), x(t)). Comencemos por el siguienteresultado, valido para los ‘sub/super-equilibrios’:
Proposicion 9.5 Sea f como antes y sea a ∈ R tal que f(a, a) ≥ 0. Si φ ≥ a,entonces
1. x(t, φ) ≥ x(t, a) ≥ a para todo t ≥ 0.
2. x(t, a) es creciente y, si esta acotada, entonces converge a un equilibrio.
Conclusiones analogas (con cambios obvios) valen si f(a, a) ≤ 0.
Demostracion:La desigualdad x(t, φ) ≥ x(t, a) es consecuencia directa de la proposicion
anterior. Por otro lado, llamando x(t) = x(t, a), en [0, τ ] vale x′(t) = f(x(t), a)y ademas a′ = 0 ≤ f(a, a). De esta forma se deduce, como en la proposicion
86

previa, que x(t) ≥ a. Repitiendo el procedimiento, se ve que la desigualdad siguevaliendo para todo t. Finalmente, podemos usar las propiedades del flujo paraescribir todo de una manera elegante: como a ≤ xt para todo t ≥ 0, entonces
xs(a) ≤ xs(xt(a)) = xs+t(a)
para todo s ≥ 0. Esto prueba que la funcion t 7→ xt es creciente y, en conse-cuencia, la funcion x(t, a) es creciente. En caso de estar acotada, sabemos porla Proposicion 9.3 que converge para t→ +∞ a un punto de equilibrio.
Esta ultima proposicion permite probar un resultado de estabilidad analogoal caso, sumamente sencillo, de una ecuacion escalar sin retardo. A tal efecto,observemos (¿recordemos?) en primer lugar que, dada la ecuacion
x′(t) = f(x(t))
con f localmente Lipschitz es valido, para cada equilibrio e (es decir, para cadae tal que f(e) = 0), el siguiente criterio:
1. Si f > 0 en [e − δ, e) y f < 0 en (e, e + δ], entonces e es localmenteasintoticamente estable. Mas precisamente, si |x(0) − e| ≤ δ entoncesx(t)→ e para t→ +∞.
2. Si f < 0 en [e − δ, e) y f > 0 en (e, e + δ], entonces e es inestable, enel sentido de que las soluciones distintas de e que comienzan en la franja[e− δ, e+ δ] se ‘escapan’ de allı y luego no vuelven a entrar.
Lo anterior es inmediato a partir de la ecuacion: basta analizar el signo de x′
y emplear el hecho (crucial) de que las trayectorias no se cruzan. En particularsi e es un cero simple de f entonces su estabilidad local queda completamentedeterminada por el signo de f ′(e), en caso de que la derivada exista. A modode regla general, podemos expresarlo de la siguiente manera para un intervaloarbitrario [a, b] que contiene en su interior un equilibrio e:
1. Si (x−e)f(x) < 0 para x ∈ [a, b]\e entonces toda solucion con condicioninicial x0 ∈ [a, b] esta globalmente definida y converge a e.
2. (x− e)f(x) > 0 para x ∈ [a, b] \ e entonces las soluciones con condicioninicial x0 ∈ [a, b] \ e se alejan de e hasta salir del segmento [a, b].
Como veremos, el mismo resultado vale para la ecuacion (27) con f de clase C1
y creciente en la segunda coordenada.
Proposicion 9.6 Sea f : R2 → R de clase C1 y creciente en su segunda coor-denada y sea e ∈ R un equilibrio que pertenece a cierto intervalo (a, b).
1. Si (x − e)f(x, x) < 0 para x ∈ [a, b] \ e entonces toda solucion concondicion inicial φ tal que φ(t) ∈ [a, b] para todo t esta globalmente definiday converge a e.
87

2. (x−e)f(x, x) > 0 para x ∈ [a, b]\e entonces las soluciones con condicioninicial φ tal que φ(t) ∈ [a, b]\e para todo t salen del intervalo para algunt.
Demostracion:Observemos en primer lugar que no hay otros equilibrios en el intervalo, pues
f(x, x) 6= 0 para x ∈ [a, b] \ e. En el primer caso, f(a, a) > 0 > f(b, b), demodo que por la proposicion anterior vale, para todo t,
a ≤ x(t, a) ≤ x(t, φ) ≤ x(t, b) ≤ b
y ademasx(t, a) e, x(t, b) e
para t→ +∞. Esto implica que x(t, φ)→ e.En el segundo caso, si por ejemplo φ(t) ∈ (e, b] para todo t entonces existe
c > e tal que φ(t) ≥ c para todo t y f(c, c) > 0; luego, x(t, φ) ≥ x(t, c). Perox(t, c) crece y no converge a ningun valor de (e, b] ya que no hay otros puntosde equilibrio; luego se escapa del intervalo y, en consecuencia, tambien lo hacex(t, φ).23
Por ejemplo, podemos considerar una vez mas la ecuacion de Nicholson
x′(t) = −dx(t) + bx(t− τ)e−x(t−τ).
En este caso, tenemos la funcion f(x, y) = −dx + bye−y que claramente nocumple las hipotesis anteriores, aunque vale ∂f
∂y (x, y) ≥ 0 para y ≤ 1. De estemodo, podemos aplicar los resultados previos para equilibrios que se encuentrandebajo de dicho valor. Tal es el caso del equilibrio nulo que, como ya vimosen el ejercicio 2 de la seccion 6, es estable para b < d. Este hecho se vuelve aconfirmar por medio de este nuevo enfoque, ya que xf(x, x) = x2(−d+be−x) > 0si x 6= 0 es suficientemente pequeno. Para b > d, en cambio, el equilibrio nulo esinestable y, ademas, se tiene equilibrio positivo: el valor x∗ = ln b
d (en presenciade la funcion exponencial, el lector comprendera la conveniencia de no seguirllamando e al equilibrio). Cuando x∗ < 1, es decir, b < de, se aplica el resultadoanterior y se concluye que x∗ es asintoticamente estable. Sin embargo, esteresultado no es del todo ‘bueno’, pues para lograr que valiera la monotonıa nosvimos obligados a imponer una condicion mas restrictiva de la que requiere, enel ejercicio mencionado, la prueba de estabilidad vıa linealizacion.
9.2 Funciones de Lyapunov
A continuacion veremos otra herramienta habitual para probar la estabilidadde un equilibrio: las funciones de Lyapunov. A modo de idea inspiradora,
23Como en el tango Mimı Pinson, podemos decir que la trayectoria se aleja ‘...para nuncaretornar’. En el caso con retardo, esto no vale en general, pero es consecuencia, otra vez, dela monotonıa ya que, como vimos, x(t, φ) es siempre mayor o igual que x(t, c).
88

consideremos el caso simple de un sistema de ecuaciones ordinarias
X ′(t) = f(X(t))
y supongamos que f verifica:
〈f(X), X〉 < 0.
Esta es una hipotesis que ya hemos usado: si vale para |X| = R, garantiza quelas soluciones que comienzan en BR(0) permanecen allı, ya que el campo definidopor f apunta hacia adentro en ∂BR(0). Pero si suponemos que vale para todoX ∈ BR(0) \ 0, entonces el campo apunta hacia adentro en todos lados ylas soluciones se ven ‘forzadas’ a acercarse al origen. En efecto, observemos enprimer lugar que por continuidad vale f(0) = 0 (alcanza con mirar el lımte sobrerectas sX con s→ 0) y ademas
(‖X‖2)′(t) = 2〈X ′(t), X(t)〉 = 2〈f(X(t)), X(t)〉 < 0
para X(t) 6= 0, lo que prueba que ‖X(t)‖2 es decreciente y en consecuenciaconverge. Por el teorema de valor medio, existe tn ∈ (n, n+ 1) tal que
‖X(n+ 1)‖2 − ‖X(n)‖2 = 2〈X ′(tn), X(tn)〉
y luego 〈X ′(tn), X(tn)〉 → 0. Tomando una subsucesion, podemos suponer queX(tn) converge a cierto X y por continuidad se deduce que 〈f(X), X〉 = 0.Luego, X = 0 y, como ‖X(t)‖ es decreciente, concluimos que X(t)→ 0.
El caso anterior V (X) := ‖X‖2 es apenas un ejemplo particular -el mastıpico- de las funciones de Lyapunov que, intuitivamente, ‘guıan’ a las trayec-torias hacia un equilibrio e. Mas en general, podemos suponer que e = 0,f(0) = 0 y definir, para un entorno abierto y acotado U ⊂ Rn del 0, unafuncion V : U → R ‘tipo paraboloide’, en el sentido de que V es positiva enU \ 0, se anula en 0, y, ademas,
〈∇V (X), f(X)〉 < 0
para todo X 6= 0. Con esto alcanza para probar que las soluciones que semantienen dentro de U convergen al equilibrio, por un razonamiento similar alanterior. Por regla de la cadena, vemos que
(V X)′(t) = 〈∇V (X(t)), f(X(t))〉 < 0
y entonces V X(t) converge a cierto r ≥ 0. Tomando como antes una sucesiontn → +∞ tal que (V X)′(tn) → 0 y usando el hecho de que U es acotado,podemos suponer que X(tn) → X. Como antes, se deduce que X = 0 y luegor = 0, lo que prueba, a su vez, que X(t)→ 0.
Como el lector atento habra observado, lo anterior todavıa no alcanza paragarantizar la estabilidad asintotica del origen, en principio por dos motivos. Porun lado, hemos probado la convergencia al origen para las soluciones ‘que se
89

mantienen dentro de U ’, pero nada asegura que las soluciones con dato inicialen U no se puedan escapar. Y, por otra parte, tampoco hemos probado laestabilidad. Precisamente, ocuparnos de este ultimo detalle nos resuelve los dosproblemas a la vez, ya que entonces podemos fijar ε > 0 tal que Bε(0) ⊂ U yδ ≤ ε tal que la solucion se mantiene en Bε(0) cuando el dato inicial se encuentraen Bδ(0) y, en consecuencia, converge al origen.
Para ver la estabilidad, consideremos ε > 0 y, como V 6= 0 en Rn \ 0,podemos fijar η > 0 tal que V (X) > η para todo X con ‖X‖ = ε. Pero ademasV (0) = 0, ası que tambien podemos fijar δ ∈ (0, ε) tal que V (X) < η para todoX ∈ Bδ(0). Veamos que las soluciones con dato inicial de norma menor que δse mantienen siempre dentro del conjunto
A := X ∈ Rn : ‖X‖ < ε, V (X) < η,
que obviamente es un entorno abierto del origen. En efecto, si X es una soluciontal que ‖X(0)‖ < δ, vale tambien que X(0) ∈ A. Supongamos que X(t) toca∂A por primera vez en cierto t0 > 0, entonces por la eleccion de η se deduce que0 < ‖X(t0)‖ < ε y, en consecuencia, V (X(t0)) = η. En particular, esto implicaque (V X)′(t0) ≥ 0, es decir:
0 ≤ 〈∇V (X(t0)), X ′(t0)〉 ≤ 〈∇V (X(t0)), f(X(t0))〉,
lo que es absurdo.A fin de generalizar las ideas previas para una ecuacion con retardo, cabe
mencionar que, en realidad, la definicion habitual de V involucra directamenteel sistema dinamico y es un poco mas general, pues no requiere en principiola diferenciabilidad de V . Lo que suele pedirse es un tanto mas oscuro: queV (X) < 0 para X 6= 0, donde
V (X) :=∂
∂tV (X(t)).
Esto da por sobreentendido que X es una solucion y se puede interpretar demanera un poco mas ‘prolija’, empleando el flujo. En realidad, como se trata deun sistema autonomo alcanza con suponer que X es un estado inicial, entonceslo anterior se traduce directamente como
V (X) :=∂
∂tV (Φ(t,X))|t=0 = lim
h→0
V (Φ(h,X))− V (X)
h
pues Φ(0, X) = X.24
Esto motiva la siguiente definicion para un sistema X ′(t) = F (Xt), con F eslocalmente Lipschitz tal que F (0) = 0 (entendiendo, como siempre, que 0 = 0,donde el primer cero -o el segundo, si se prefiere- denota la funcion nula). Comoes de esperar, la funcion de Lyapunov no sera ahora una funcion, sino unafuncional definida sobre un entorno abierto U del 0 en espacio C([−τ, 0],Rn).Por otra parte, ahora el sistema no es dinamico sino semi, ası que solo se puede
24Si se quiere generalizar un poco mas, el lımite puede reemplazarse por lımite superior.
90

asegurar la existencia del flujo hacia la derecha. De este modo, dada V : U → Rcontinua y φ ∈ U definimos
V (φ) := limh→0+
V (Φ(h, φ))− V (φ)
h
siempre que el lımite exista. En particular, vale trivialmente V (0) = 0. Laidea intuitiva (achicando U , si hace falta) es que si V (φ) < 0 para toda φ 6=0, entonces 0 es atractor para todas las soluciones que comienzan en U . Enrealidad, veremos un resultado un poco mas general, aunque para ello vamos anecesitar la hipotesis de que F sea compacta. Concretamente, bajo condicionesapropiadas vamos a ver que el ω-lımite de cualquier trayectoria que comienzaen cierto conjunto esta contenido en el conjunto crıtico V = 0.
A fin de simplificar la exposicion, recordemos la notacion antes introducidaXh(φ) para la trayectoria que comienza en φ, evaluada a tiempo h. En otraspalabras, Xh(φ) = Φ(h, φ) o, equivalentemente, Xh(φ)(s) = X(s + h, φ) paratodo s ∈ [−τ, 0]. Luego, el lımite anterior se escribe directamente en la forma
V (φ) := limh→0+
V (Xh(φ))− V (φ)
h.
La condicion que pediremos es que la funcion V : U → R sea continua y valgaV (φ) ≤ 0 para toda φ ∈ U .
Es tentador (por decirlo de algun modo... en todo caso, la tentacion tienemultiples variantes) pensar que, al igual que en los sistemas de ecuaciones or-dinarias, si se asume que V es suave entonces V puede pensarse directamentecomo una condicion comparable a la del caso sin retardo,
〈∇V (X), F (X)〉 ≤ 0.
En efecto, si llamamos ϕ(t) := V Φ(t, φ), podemos reescribir el anterior cocienteincremental como
V (Xh(φ))− V (φ)
h=V (Φ(h, φ))− V (Φ(0, φ))
h=ϕ(h)− ϕ(0)
h→ ϕ′(0)
y, aplicando regla de la cadena, obtenemos:
V (φ) = DV (Φ(0, φ))(DΦ(·, φ)|t=0) = DV (φ)(DΦ(·, φ)|t=0).
Pero ahora podemos observar que
DΦ(·, φ)|t=0 = limh→0+
Φ(h, φ)− Φ(0, φ)
h=∂Φ(·, φ)
∂t
∣∣∣t=0
y, de esta forma, llegamos a algo que resulta esencialmente verdadero perotristemente falso. A los fines de calcular cosas ‘a lo bruto’ funciona, si pensamossimplemente que la derivada del flujo -que, ¡no olvidar!, es un elemento delespacio C([−τ, 0],Rn)-, evaluada en cualquier s ∈ [−τ, 0] vale
limh→0+
Φ(h, φ)(s)− Φ(0, φ)(s)
h= limh→0+
X(h+ s, φ)−X(s, φ)
h= X ′(s, φ).
91

El pequeno inconveniente es que, como s ∈ [−τ, 0], la solucion X(s, φ) coincidecon φ(s), de modo que la derivada anterior deberıa dar exactamente φ′... claro,eso en caso de que φ sea derivable.
Por supuesto, si en lugar de φ ponemos Xt0 para algun t0 razonablementegrande (lease: mayor que τ), entonces el lımite anterior funciona perfectamentebien y da por resultado la derivada de la funcion Xt0 .25 Si tenemos en cuenta,ademas, que
X ′t0(s) = X ′(t0 + s, φ) = F (Xt0+s)
entonces, abusando ligeramente de la notacion, podemos escribir:
V (Xt0) = DV (Xt0)(F Φ(·, Xt0)),
donde Φ(·, Xt0) : [−τ, 0]→ C([−τ, 0],Rn) es la funcion definida por Φ(·, Xt0) =Φ(s,Xt0) = Xt0+s. Cabe observar, ademas, que en terminos de la anteriorfuncion ϕ = V Φ(·, φ) se tiene que V (Xt0) = ϕ′(t0); luego, la condicion V ≤ 0expresa el hecho mas o menos intuitivo de que V decrece a lo largo de lastrayectorias.
Asumiendo que el lector tiene un espıritu mas bien refinado y no se encuentrafamiliarizado con los brutos procederes, conviene ver un ejemplo para entenderque, en algunos casos, la brutalidad no es un metodo del todo despreciable.Consideremos la ecuacion (escalar) lineal
x′(t) = ax(t) + bx(t− τ)
e intentemos construir una funcion de Lyapunov para probar, bajo condicionesapropiadas, la estabilidad del equilibrio nulo. Si Lyapunov pide paraboloides,demosle paraboloides... o al menos algo que se le parezca, por ejemplo:
V (φ) =φ(0)2
2+ µ
∫ 0
−τφ(s)2 ds
con µ > 0 a definir. Como dijimos, el objetivo es que V ‘acompane’ las trayec-torias hasta depositarlas gracilmente, para t→ +∞, en el origen (lo de ‘gracil’no es mas que un recurso literario, no muy compatible con la brutalidad que ellector esta a punto de presenciar). Es inmediato verificar que V es diferenciableen el sentido de Frechet y vale
DV (φ)(ψ) = φ(0)ψ(0) + 2µ
∫ 0
−τφ(s)ψ(s) ds.26
Pero entonces, la formula anterior dice:
V (φ) = DV (φ)(φ′) = φ(0)φ′(0) + 2µ
∫ 0
−τφ(s)φ′(s) ds.
25Queda como ejercicio verificar que la convergencia es uniforme en s.26Esto queda como ejercicio. Se puede, una vez mas (eso sı, que no se transforme en habito)
derivar a lo bruto, o simplemente calcular el lımite usando el hecho de que V es una formacuadratica.
92

No hay problemas con el primer termino; de hecho, esto no es casualidad porquecorresponde a la parte sin retardo: aunque φ no sea derivable, podemos suponer(otra vez, abusando un poco de la notacion) que se trata de su derivada porderecha, es decir, la derivada de x(t, φ) en t = 0. El calculo es entonces muysencillo:
x′(0+) = ax(0) + bx(−τ) = aφ(0) + bφ(−τ).
En cambio, para la parte que aparece dentro de la integral, la sensacion es queestamos fritos, pues la ecuacion no rige para s ≤ 0. Sin embargo, si φ es derivablevale 2φφ′ = (φ2)′ y entonces por el mencionado methodus Brutus resulta:
V (φ) = φ(0)(aφ(0) + bφ(−τ)) + µ
∫ 0
−τ(φ2(s))′ ds
= φ(0)(aφ(0) + bφ(−τ)) + µ(φ(0)2 − φ(−τ)2).
Pero los metodos de Brutus han sido muy criticados por los historiadores (sibien, hasta la fecha, son pocos los que han objetado su efectividad). Ası quevamos a dar al Cesar lo que es del Cesar y hacer las cuentas con mayor cuidado.El lımite correspondiente al primer termino de V (φ) es inmediato y coincide conlo que dio pocos parrafos atras:
limh→0+
xh(φ)(0)2 − φ(0)2
2h= limh→0+
x(h, φ)2 − x(0, φ)2
2h
= x(0, φ)x′(0+, φ) = φ(0)(aφ(0) + bφ(−τ)).
En cambio, el otro termino requiere un poco mas de atencion, ya que tenemosterminantemente prohibido derivar dentro de la integral. Sin embargo, paracualquier funcion continua ϕ, sea o no derivable, se cumple:
limh→0+
∫ 0
−τ
ϕ(h+ s)− ϕ(s)
hds = lim
h→0+
∫ h−τ+h
ϕ(s) ds−∫ 0
−τ ϕ(s) ds
h
= limh→0+
∫ h0ϕ(s) ds−
∫ −τ+h
−τ ϕ(s) ds
h= ϕ(0)− ϕ(−τ).
Esto ultimo no es ninguna brutalidad sino simplemente el teorema fundamentaldel calculo que, aplicado a la funcion ϕ = φ2, nos da exactamente como antes.Entonces podemos asegurar que
V (φ) = (a+ µ)φ(0)2 + bφ(0)φ(−τ)− µφ(−τ)2,
es decir, V (φ) = WTAW dondeW es el vector
(φ(0)φ(−τ)
)y la matriz A ∈ R2×2
esta dada por (µ+ a b
2b2 −µ
).
93

Queremos lograr que valga V (φ) ≤ 0, de modo que tenemos que encontrarcondiciones para que A sea definida negativa. Apelando a los calidos recuerdosde nuestros primeros cursos en la facultad, podemos asegurar que esto ocurre(estrictamente) si el determinante es positivo y el primer coeficiente es negativo,es decir:
µ < −a, b2 < −4µ(µ+ a).
Pero el valor µ > 0 lo podemos elegir libremente, de modo que, si a es negativo,conviene tomar µ = −a2 , porque es el que maximiza la funcion −µ(µ + a) y,por consiguiente, da el mejor valor posible para b. En conclusion, una condicionsuficiente es:
b2 < 4a
2
(a− a
2
)= a2.
En otras palabras, cuando a < 0 y |b| < −a, el equilibrio nulo es asintoticamenteestable; nada mal, si tenemos en cuenta que el resultado coincide con lo obtenidoen la seccion 6 para la estabilidad absoluta (independiente de τ).
Claro que en realidad todo esto es, por el momento, una expresion de de-seo, pues apenas nos ‘inspiramos’ en lo que dice Lyapunov para las ecuacionesordinarias. Pero es suficiente como para empezar a fantasear: ¿sera cierto? Larespuesta (felizmente afirmativa) viene dada por el siguiente resultado, llamadoprincipio de invariancia de LaSalle.
Teorema 9.2 Supongamos que F es compacta y sea V : U → R como antes.Supongamos, ademas, que para toda φ ∈ U la trayectoria Xt(φ) esta acotada yse mantiene dentro de U para todo t ≥ 0. Entonces ∅ 6= ω(φ) ⊂ I, donde I esel subconjunto invariante maximal de S := ψ ∈ U : V (ψ) = 0.
Antes de preguntar ¿y esto con que se come?, conviene entender mejor loque ocurre en el ejemplo anterior, para el cual U = C([−τ, 0],R). Tomandocomo antes µ = −a2 > 0 y |b| < −a, resulta
V (φ) =a
2(φ(0)2 + φ(−τ)2) + bφ(0)φ(−τ).
Completando cuadrados, se ve que
V (φ) =a
2(φ(0)− φ(−τ))2 + (a+ b)φ(0)φ(−τ)
lo que prueba, en definitiva, que
S = ψ : V (ψ) = 0 = ψ : ψ(0) = ψ(−τ) = 0.
Notemos que las trayectorias estan acotadas: por ejemplo, se puede ver demanera directa que si ‖φ‖ < R entonces la correspondiente solucion x(t) =x(t, φ) satisface |x(t, φ)| < R para todo t. En efecto, de modo muy similar alque hemos empleado en situaciones anteriores, si suponemos que x(t0) = R porprimera vez en cierto valor t0, entonces
0 ≤ x′(t0) = aR+ bx(t0 − τ) ≤ (a+ b)R,
94

lo que es absurdo. De la misma forma se prueba que x(t) > −R para todot. Por otra parte, es mas que claro que la funcion F (φ) := aφ(0) + bφ(−τ) escompacta, ası que el teorema dice, entonces, que el ω-lımite de cualquier φ estacontenido en I, el subconjunto invariante maximal de S.
Veamos que I = 0 y, en consecuencia, ω(φ) = 0 para toda φ. Enefecto, aunque S contiene ‘muchas cosas’, el subconjunto I es invariante, lo cualimplica que xt(ψ) ∈ I para todo t ≥ 0 y toda ψ ∈ I. Pero esto significa quext(ψ)(0) = xt(ψ)(−τ) = 0 para todo t ≥ 0, es decir:
x(t, ψ) = x(t− τ, ψ) = 0
para todo t ≥ 0. Se deduce que x(t, ψ) = 0 para todo t ≥ −τ y, en particular,ψ ≡ 0. Vemos, entonces, que el resultado del teorema se ajusta mas o menos alo que esperabamos, ası que es hora de pasar a la
Demostracion del teorema:Ya sabemos (¿no?) que ω(φ) es no vacıo y compacto. Como ya vimos, el
lımite
limh→0+
V (Xt+h(φ))− V (Xt(φ))
h= V (Xt(φ)) ≤ 0
dice que la funcion t 7→ V (Xt(φ)) es decreciente. Ademas, se trata de unacomposicion de funciones continuas y esta acotada, pues O+(φ) tiene clausuracompacta; en consecuencia, V (Xt(φ)) c para cierta constante c. Tomemosahora ψ ∈ ω(φ) y tn → +∞ tales que Φ(tn, φ)→ ψ. Destrabando lenguas, estoquiere decir que Xtn(φ)→ ψ; luego V (Xtn(φ))→ V (ψ), lo que permite concluirque V (ψ) = c. En consecuencia,
ω(φ) ⊂ ψ ∈ U : V (ψ) = c.
Sabemos tambien (¿eh?) que ω(φ) es invariante, de modo que, para todo t ≥ 0y toda ψ ∈ ω(φ) se tiene que Xt(ψ) ∈ ω(φ), de modo que V (Xt(ψ)) = c. Estoimplica, finalmente, que
V (ψ) = limh→0+
V (Xh(ψ))− V (ψ)
h= limh→0+
c− ch
= 0.
Como el conjunto invariante maximal I es -quien lo hubiera dicho- invariante ymaximal, se deduce que ω(φ) ⊂ I.
Para no entusiasmarnos mas de la cuenta, conviene aclarar que la con-struccion de una funcion de Lyapunov es una tarea bastante artesanal y elesfuerzo no siempre lleva a buen puerto. En general, no es posible afirmar que,dado un equilibrio estable, existe siempre una funcion de Lyapunov. Para elproblema lineal escalar, vimos que la existencia de V esta garantizada bajo lahipotesis de que el origen es absolutamente estable (en rigor, se puede probarque son equivalentes), aunque para el caso de un sistema lineal se trata de unproblema abierto: ¿la estabilidad absoluta implica la existencia de V ? Paraanalizar esto con mas detalle, consideremos el sistema
X ′(t) = AX(t) +BX(t− τ)
95

y supongamos que todos los autovalores de A tienen parte real negativa.27 Conayuda de alguien que se acuerde algo de algebra lineal, consideremos una matrizsimetrica C tal que ATC+CA = −D, donde D es una matriz diagonal definidapositiva. La funcion de Lyapunov que vamos a considerar ahora es
V (φ) = φ(0)TCφ(0) +
∫ 0
−τφ(s)TEφ(s) ds
donde E es una matriz definida positiva que cumplira el rol de µ en el casoanterior. Es facil verificar (¡ah, siempre nos dicen lo mismo!) que
V (φ) = −φ(0)TDφ(0)+φ(0)T (CB+BTC)φ(−τ)+φ(0)TEφ(0)−φ(−τ)TEφ(−τ),
lo cual, para empeorar un poco las cosas, se puede escribir:
WTMW
donde W =
(φ(0)φ(−τ)
)y M es la matriz definida en bloques
M =
(E −D CB+BTC
2CB+BTC
2 −E
).
Entonces la pregunta es: ¿bajo que condiciones sobre A y B se puede garantizarla existencia de E tal que M es definida negativa?
Aunque la respuesta mas honesta a la pregunta anterior serıa, a grandesrasgos, decir ‘ni idea’, podemos intentar sacar algo en limpio para algunas situa-ciones especıficas. Por ejemplo, sabemos que D es positiva, asi que eligiendo Etal que D−E sea positiva, podemos estar seguros de que M es definida negativacuando B esta suficientemente cerca de la matriz nula. No es gran cosa, peroal menos resulta consistente con el hecho de que las soluciones de la ecuacioncaracterıstica
det(I −A−Be−λτ ) = 0
tienen parte real negativa para B en cierto entorno de 0.
9.3 Ejercicios
1. Sea Φ : R× E → E un sistema semi-dinamico autonomo.
(a) ¿Es cierto que toda solucion s : [0,+∞)→ E se extiende a R?
(b) Sea C ⊂ E un conjunto invariante. Dado c ∈ C, probar que existeuna solucion s : R→ E tal que s(0) = c. ¿Es unica?
2. Sea Φ : R×E → E un sistema dinamico autonomo. Probar que la funcionΦ(t, ·) : E → E es biyectiva para todo t. ¿Que ocurre si E es un espaciometrico?
27En el caso escalar, esto equivale obviamente a pedir la condicion a < 0 que como sabemos,es necesaria para lograr estabilidad absoluta.
96

3. Dada la ecuacion x′(t) = f(x(t), x(t − τ)) con f de clase C1, probar quesi para a < b se cumple
f(a, y) ≥ 0 ≥ f(b, z)
para a ≤ y, z ≤ b, entonces el conjunto
C := φ ∈ C([−τ, 0],R) : a ≤ φ ≤ b
es positivamente invariante.
4. Dado a 6= 0, construir una funcion de Lyapunov para la ecuacion
x′(t) = ax(t)3 + bx3(t− τ).
5. Consideremos la ecuacion
x′(t) = bx(t− τ)(1− x(t))− cx(t)
con b > 0, c ≥ 0. Probar:
(a) El conjunto C := φ : 0 ≤ φ ≤ 1 es positivamente invariante.
(b) Si c > b, entonces 0 es un atractor global.
(c) Volver a probar el punto anterior de otra manera. ¨
6. Sea f : Rn × Rn → Rn de clase C1 tal que, para cierto R < 0, vale
〈f(u), u〉 < 0 para ‖u‖ = R.
(a) Probar que el sistema x′(t) = f(x(t), x(t − τ)) tiene un punto deequilibrio e ∈ BR(0).
(b) Verificar que si τ es pequeno entonces e es estable. ¿Se puede asegurarque es asintoticamente estable? ¿Que ocurre cuando τ es grande?
7. Construir una funcion de Lyapunov para analizar la estabilidad del equi-librio positivo de la ecuacion
x′(t) = x(t)(1− ax(t)− bx(t− τ)),
con a > b > 0.
10 Bifurcaciones de Hopf
En esta ultima seccion veremos las nociones basicas de la teorıa de bifurcacionesde Hopf. Intuitivamente, dado un sistema dinamico, se trata de encontrar solu-ciones periodicas que, bajo la mirada aprobatoria de Borges, se ‘bifurcan’ apartir de un punto de equilibrio.
97

Mas en general, dado sistema dinamico que depende de un parametro, unabifurcacion es un cambio topologico en la estructura de las orbitas cuando dichoparametro cruza cierto valor. Para fijar ideas, consideremos en primer lugar dossistemas autonomos de ecuaciones ordinarias
X ′(t) = f(X(t)), Y ′(t) = g(Y (t))
con f, g : Rn → Rn funciones suaves. Se dice que los sistemas dinamicosasociados son topologicamente equivalentes cuando existe un homeomorfismoh : Rn → Rn tal que las orbitas del primer sistema se transforman en orbitasdel segundo sistema, preservandose la direccion en el tiempo. Una nocion masgeneral es la de equivalencia local: cuando se trata de sistemas con parametros
X ′(t) = f(X(t), α), Y ′(t) = g(Y (t), β)
con f, g : Rn × R → Rn suaves tales que f(0, α) = g(0, β) = 0, se dice que lossistemas son equivalentes cerca del origen si para α cercano a 0 existe β = β(α)continua e inyectiva y homeomorfismos hα : Uα → Vβ con Uα, Vβ entornos delorigen tales que hα(0) = 0 y las orbitas del primer sistema para α que caenen Uα se transforman en orbitas del segundo sistema para β, preservando laorientacion. Una bifurcacion consiste en un cambio de tipo topologico (es decir,la aparicion de un retrato de fase no equivalente) a partir de la variacion delparametro α. Un ejemplo basico es el de la ecuacion escalar de segundo orden
−u′′(t) = µu(t)
que, como es usual, se transforma en un sistema X ′(t) = AX(t) mediante el
cambio x = u, y = u′, con A =
(0 1−µ 0
). Cuando µ < 0, los autovalores
de A son ±√−µ y el origen es un equilibrio inestable; en cambio, para µ > 0
los autovalores son ±√µi y todas las soluciones son periodicas de perıodo 2π√µ .
En particular, si estamos interesados en las soluciones T -periodicas para ciertoT fijo, entonces al aumentar µ obtenemos uno a uno los valores del espectrodel operador Lu := −u′′ (empezando obviamente por 0, que corresponde a lasautofunciones constantes):
σ(L) =
(2kπ
T
)2
: k ∈ N0
.
Existe un teorema muy conocido, el de Hartman-Grobman, que dice que si unequilibrio es hiperbolico, es decir, si todos los ceros de la ecuacion caracterısticatienen parte real no nula, entonces el tipo topologico queda completamentecaracterizado por la cantidad p de autovalores con parte real positiva del sistemalinealizado.28 Es claro, ademas, que dicha cantidad implica se mantiene por
28Por supuesto, en tal caso la cantidad de autovalores con parte real negativa es n − p.Esto no vale para las ecuaciones con retardo, aunque todavıa es posible probar, bajo hipotesisapropiadas, que el sistema se comporta localmente como el linealizado. Ver [9]
98

perturbaciones pequenas del parametro α, ya que la funcion caracterıstica (eneste caso, un polinomio) es continua respecto de α, de modo que los cambios deestructura deben esperarse cuando se pierde hiperbolicidad. En general, estopuede ocurrir cuando para cierto valor del parametro un autovalor se vuelve0, pero tambien cuando aparece un par conjugado de raıces imaginarias puras,dando lugar a orbitas cerradas. Tal es el caso, en general, de las bifurcacionesde Hopf.
Por ejemplo, consideremos como antes el sistema lineal X ′ = AX, ahora con
A =
(0 1−1 µ
)
cuyos autovalores para |µ| < 2 sonµ±√
4−µ2 i
2 . Mientras µ 6= 0, el origen es unequilibrio hiperbolico, pero para µ = 0 las raıces caracterısticas son imaginariaspuras y las orbitas son periodicas. Observemos que, cuando 0 < |µ| < 2, lasorbitas son espirales que, para t→ +∞, convergen al origen si µ < 0 y se alejansi µ > 0.
En el caso de ecuaciones con retardo, supondremos una familia
X ′(t) = F (Xt, µ)
en donde F : C([−τ, 0],Rn) × R → Rn es suave (tanto como haga falta) y 0 espunto de equilibrio para todo valor del parametro µ, es decir:
F (0, µ) = 0.
Nos interesa analizar el comportamiento del sistema a partir del estudio de laecuacion linealizada
X ′(t) = L(µ)(Xt),
donde L(µ) es la diferencial de F respecto de φ, es decir:
F (φ, µ) = L(µ)(φ) +R(φ, µ)
con R(φ,µ)‖φ‖∞ → 0 para ‖φ‖∞ → 0. Recordemos (¡claro, claro!) que, a pesar de
que L(µ) es un operador lineal (continuo) definido en un espacio de dimensioninfinita, la ecuacion caracterıstica asociada al problema lineal tiene la forma
det(λI − L(µ)λ) = 0,
donde L(µ)λ es una matriz hecha y derecha, cuyo coeficiente ij esta dado por
(L(µ)λ)ij = L(µ)i(expλej).
Bajo ciertas condiciones, veremos que si para µ = 0 existen raıces simplesλ0 = ±iν0, entonces existe una rama de soluciones periodicas no constantes dela ecuacion con perıodo cercano a 2π
ν0, correspondientes a valores pequenos de
µ.
99

Antes de pasar al enunciado preciso, veamos un ejemplo tıpico, la ecuacion
x′(t) = x(t− 1)(x(t)2 + x(t− 1)2 − µ).
Para µ ≤ 0, el origen es el unico equilibrio; en cambio, si µ > 0 se tienen tambienlos equilibrios ±
√µ2 : a eso sı que podemos llamar un ‘cambio de estructura’.
Pero nos interesa todavıa mas lo que ocurre en otro valor de µ que descubrimos,como quien no quiere la cosa, linealizando. Dicho y hecho, en este caso
f(x, y) = y(x2 + y2 − µ) = −µy +R(x, y)
de modo que la linealizacion en el origen es
x′(t) = −µx(t− 1).
Esta no es otra que la ecuacion lineal con feedback que estudiamos en la seccion3. Al cabo de nuestro analisis, por ese entonces todavıa ingenuo, para el valorµ = π
2 vimos aparecer (a los fines literarios, se puede agregar aquı: ‘subitamente’o ‘ante nuestros propios ojos’) soluciones periodicas.29 El equilibrio nulo esasintoticamente estable para 0 < µ < π
2 y luego se vuelve inestable. Vamos aver que el problema no lineal presenta un fenomeno similar.
En efecto, podemos intentar directamente una funcion que tenga la pintax(t) := r cos
(πt2
), para la cual vale
x′(t) = −πr2
sen
(πt
2
), x(t− 1) = r cos
(πt
2− π
2
)= rsen
(πt
2
),
x(t)2 + x(t− 1)2 = r2.
Luego, basta elegir r tal que −π2 = r2 − µ, es decir: r = ±√µ− π
2 . Dicho
de otra manera, se tiene un continuo de soluciones periodicas xr = r cos(πt2
)correspondientes a µ = µ(r) = r2 + π
2 . Esto es, a grandes rasgos, lo que prediceel teorema de Hopf, que pronto veremos (¡paciencia! Ya llegara).
Cabe sospechar, sin embargo, que otra vez hemos sido enganados, pues lassoluciones que aparecieron tienen todas exactamente el mismo perıodo: ob-servando mejor el ejemplo, entendemos que la trampa consiste en que la tanmentada no-linealidad es algo artificial y fue inventada con toda la intencion deque (Pitagoras mediante) al evaluarla sobre el lugar indicado se comporte enrealidad como un problema lineal. ¿Y cual es ‘el lugar indicado’? Por supuesto,el subespacio generado por sen
(πt2
), cos
(πt2
), que tiene todo el aspecto de
ser el nucleo de algun operador. Esto nos lleva a hablar, una vez mas, de losproblemas resonantes (no esta permitido hacer aquı el chiste de que ‘estamosresonados’).
En el caso anterior, el operador es Lx(t) := x′(t) + π2x(t−1); a fin de buscar
soluciones π2 -periodicas, el problema anterior se puede pensar como
Lx(t) = x(t− 1)(x(t)2 + x(t− 1)2 − µ0)
29Observemos tambien que, cuando µ 6= 0, el origen es el unico equilibrio, mientras que paraµ = 0 cualquier constante es un equilibrio, lo que nos hace intuir que ‘algo especial’ ocurrecuando se atraviesa dicho valor.
100

donde µ0 := µ − π2 . En general, vamos a ver una manera de buscar solu-
ciones T -periodicas de una ecuacion de la forma Lx = Nx, donde L es unoperador diferencial lineal no inversible en el espacio CT de funciones continuasT -periodicas y N : CT → CT es no lineal.
Para comenzar, vamos a ver el caso, bastante mas sencillo, de resonancia enel autovalor nulo. Consideremos la ecuacion
X ′(t) = F (t,Xt) := NX(t)
con F : R×C([−τ, 0],Rn)→ Rn continua y T -periodica en t. En la seccion 8.1vimos una forma de encontrar soluciones por medio del teorema de Schauder,intentando ‘zafar’ de la resonancia (por decirlo de un modo elegante). Peroahora apelaremos a toda nuestra sangre frıa para atacar la resonancia de frente.
Para empezar, observemos que LX := X ′ es, interpretado adecuadamenteun operador de Fredholm. Esto es lo que se propone probar, mas en general,en el ejercicio 6 de la seccion 8.1, aunque para mayor claridad lo veremos acontinuacion de manera directa.
Por un lado, es obvio que el nucleo de L es el conjunto de funciones constantes(identificado con Rn); por otro lado, veamos que su imagen es el conjunto defunciones de promedio 0 , que es precisamente el complemento del subespaciode las funciones constantes.30
En efecto, escribiendo la solucion del problema X ′(t) = ϕ(t) en la forma
X(t) = X0 +∫ t
0ϕ(s) ds, se verifica que existe solucion T -periodica si y solo si
ϕ := 1T
∫ T0ϕ(t) dt = 0. Notemos, ademas, que X0 se puede elegir libremente,
hecho que se debe justamente a que ker(L) = Rn. Pero esta solucion es unica sipedimos, por ejemplo, que la solucion tenga promedio nulo: para esto, alcanzacon elegir el (ahora sı) unico X0 tal que
X0 +1
T
∫ T
0
∫ t
0
ϕ(s) ds dt = 0
En definitiva, lo que hemos hecho es definir un operador inverso a derecha de L,dado por Kϕ = X. Es facil verificar (para usos multiples) que K es compacto,por ejemplo empleando la formula explıcita
Kϕ(t) := − 1
T
∫ T
0
∫ t
0
ϕ(s) ds dt+
∫ t
0
ϕ(s) ds.
En este contexto, observemos que X ∈ CT es solucion del problema LX = NXsi y solo si
X −X = K(NX).
Sin embargo, esta ultima igualdad lleva implıcita una segunda propiedad paraNX, necesaria para formar parte del selectısimo conjunto de funciones que se
30Por supuesto, el uso del artıculo determinado no es del todo correcto, aunque es ciertoque, si pensamos en el producto interno de L2(0, T ), entonces se trata efectivamente delcomplemento ortogonal.
101

pueden meter dentro de K: su promedio debe ser nulo. Esto hace que sea difıciltrabajar con la ecuacion anterior, lo que lleva a una primera primera respuestainstintiva ante la dificultad: intentar trabajar en el conjunto X : NX = 0 que,con un poco de suerte, es una variedad. Sin embargo, no hace falta pensarlodemasiado para llegar a la conclusion de que conviene buscar otra opcion mascomoda.
A tal fin, primero notemos que nos podemos despreocupar por completo dela restriccion impuesta por el dominio de K, justamente proyectando NX sobredicho conjunto: la ecuacion anterior se convierte entonces en
1. X −X = K(NX −NX).
Claro que esto no alcanza, ya que ademas debe valer la llamada ecuacion debifurcacion:
2. NX = 0
En resumen, lo anterior muestra que X ∈ CT es solucion si y solo si se verificanlas propiedades 1 y 2. Pero, mejor todavıa, podemos resumir ambas propiedadesen una unica ecuacion de punto fijo:
X = X +NX +K(NX −NX). (28)
10.1 Metodo de averaging
A modo de ejemplo (algo tendencioso), veamos una aplicacion clasica: el metodollamado de averaging, que sirve para resolver, para ε cercano a 0, ecuaciones deltipo
X ′(t) = εF (t,Xt, ε).
donde F : R×C([−τ, 0],Rn)×R→ Rn es una funcion suave y T -periodica en t.Haciendo caso omiso de las crıticas, llamaremos f a su restriccion al subespaciode funciones constantes, es decir, la funcion f : R× Rn × R→ Rn dada (de unmodo un tanto tautologico) por f(t,X, ε) := F (t,X, ε). Uno podrıa preguntarsepara que pedimos ‘suavidad’ cuando antes alcanzaba con ‘continuidad’, pero larespuesta es facil de adivinar: inspirados por (28), vamos a usar el teorema dela funcion implıcita para encontrar una rama de ceros de la ecuacion
F(X, ε) = 0,
donde F es la funcion definida por
F(X, ε) := X −[X +NεX + εK(NεX −NεX)
],
con NεX(t) := F (t,Xt, ε).El lector despierto (¿hmmmmm?) habra observado que esta definicion no es
exactamente igual a la de antes, ya que al termino NεX en realidad le hemosbirlado un ε: total, ¿quien se fija? Justamente, ese es el truco clave para quela cosa funcione: como no nos interesan las soluciones con ε = 0 pues ya las
102

conocemos (son, lisa llanamente, los elementos de Rn), nuestra definicion de Fapunta a que podamos ‘ramificar’ ceros a partir de ciertas soluciones especiales,aquellas que verifican F(X0, 0) = 0. Notemos que, aunque la funcion F(·, 0)esta definida sobre el espacio CT , cualquiera de sus ceros es necesariamenteconstante. De esta forma, aunque el panorama es aun bastante sombrıo, empiezaa mejorar, pues la restriccion de dicha funcion a Rn tiene un aspecto mucho masagradable. En efecto, cuando X es constante vale X = X y entonces
F(X, 0) = −N0X = − 1
T
∫ T
0
f(t,X, 0) dt := ϕ(X),
donde (omitiendo un nuevo isomorfismo, ya somos expertos en eso) ϕ es ahorauna funcion de Rn en Rn. Con la idea de usar el teorema de la funcion implıcita,necesitamos algun isomorfismo, asi que pediremos que X0 sea un cero de ϕ talque Dϕ(X0) sea inversible.
Llegado este punto, despues de haber lidiado con operadores diferenciables enespacios de Banach, puede resultar preocupante que Dϕ(X0) no sea, en el fondo,mas que una simple matricita. ¿Alcanzara esto para asegurar que la funcionDXF(X0, 0) : CT → CT es un isomorfismo, tal como pretenden los siempreexigentes usuarios del teorema de la funcion implıcita? Para ganar tiempo,calculemos al menos cuanto vale esta ultima diferencial, mirando directamentelas derivadas direccionales:
DXF(X0, 0)(ψ) = limh→0
F(X0 + hψ, 0)−F(X0, 0)
h.
En lo anterior, cabe aclarar que si bien X0 ∈ Rn, lo estamos mirando dentrode CT ; por eso hemos considerado todas las direcciones, dadas por cualquierψ ∈ CT . Y si bien F(X0, 0) vale 0, conviene tenerlo presente a la hora decalcular el anterior lımite metiendolo (como corresponde, sin preocuparnos pornada) dentro de la integral. Pero basta de dar vueltas y hagamoslo de una vez:
F(X0 + hψ, 0)−F(X0, 0)
h= ψ − ψ +
1
T
∫ T
0
F (t,X0 + hψt, 0)− F (t,X0, 0)
hdt
y, tomando lımite,
DXF(X0, 0)(ψ) = ψ − ψ − 1
T
∫ T
0
DXF (t,X0, 0)(ψt) dt.
Esto alcanza para probar directamente que DXF(X0, 0) es biyectiva... y el restodepende de usted31 (o, mejor dicho, del teorema de la aplicacion abierta). Enefecto, notemos que
DXF(X0, 0)(ψ) = ξ ⇔ ξ = ψ − w,31Para lectores menos vetustos que el autor, conviene aclarar que la frase pertenece al clasico
televisivo Las manos magicas en el que, entre otros trucos, se mostraba como calcular a granvelocidad la derivada de Frechet de operadores complicadısimos.
103

donde
w = ψ +1
T
∫ T
0
DXF (t,X0, 0)(ψt) dt ∈ Rn.
Pero en tal caso ξ = ψ − w y vale
ξ = − 1
T
∫ T
0
DXF (t,X0, 0)(w + ξt) dt
= − 1
T
∫ T
0
DXF (t,X0, 0)(w) dt− 1
T
∫ T
0
DXF (t,X0, 0)(ξt) dt.
Resta observar ahora que, siendo w constante, vale
DXF (t,X0, 0)(w) = limh→0
f(t,X0 + hw, 0)− f(t,X0, 0)
h= DXf(t,X0, 0)(w),
lo que nos permite finalmente escribir (otra vez, intercambiando lımites conintegrales):
ξ = −Dϕ(X0)(w)− 1
T
∫ T
0
DXF (t,X0, 0)(ξt) dt.
Ya estamos muy cerca de la conclusion: como Dϕ(X0) es inversible (¡mirena nuestra matricita!), para toda ξ ∈ CT existe un unico w ∈ Rn que veri-fica lo anterior y entonces ψ = ξ + w es la (unica) solucion de la ecuacionDXF(X0, 0)(ψ) = ξ. El teorema de la aplicacion abierta es el que termina degarantizar que ξ 7→ ψ es continua, vale decir, que DXF(X0, 0) es un isomor-fismo. Una vez superados los anteriores momentos de alta excitacion, podemosahora serenarnos y, ya mas relajados, explicar con tono triunfal: existen ε0 > 0,U ⊂ CT entorno de X0 y una unica funcion suave X : (−ε0, ε0) → U tal queX(0) = X0 y F(X(ε), ε) = 0. Lo cual, dicho de otra forma, significa que paraε chico hay una (unica en U) solucion X(ε) del problema T -periodico.
Pero siempre hay alguien que arruina los triunfos; en este caso, nosotrosmismos32 con dos preguntas. La primera: ¿que ocurre si intentamos aplicar elmetodo a un problema autonomo X ′(t) = εF (Xt, ε)? El nombre averaging hacesospechar que la integracion respecto de t no es un detalle menor y, en efecto, lacosa pierde toda su gracia. No se trata de que el teorema de la funcion implıcitano se aplique, solo que ahora ϕ coincide con f(·, 0) y, en consecuencia, simple-mente detecta la existencia de una rama de soluciones constantes (equilibrios).Esto no es casualidad, porque se trata de un problema de resonancia en el au-tovalor nulo: en las proximas paginas veremos que las bifurcaciones de Hopf sebuscan justamente cuando hay autovalores de la forma λ = iν0 con ν0 6= 0.
Y la segunda pregunta es, mas bien, una objecion. Segun hemos antici-pado, al cruzar un valor de bifurcacion de Hopf aparecen soluciones con perıodo‘aproximadamente’ iguales a cierto T0, pero que no estan fijos. ¿De que nossirve aprender a buscar soluciones T -periodicas para un T especıfico? Dejamos
32Se puede traer a colacion el escrito de S. Freud sobre el que fracasa al triunfar.
104

esto en suspenso por unos instantes, aunque nos permitimos augurar que -comoantes, con algo de sangre frıa- la situacion finalmente logra acomodarse paraque podamos volver a exclamar: ¡que sigan los exitos!
10.2 Situacion general
En la seccion previa vimos una manera de resolver, empleando el teorema dela funcion implıcita, ciertos problemas resonantes que se pueden pensar comoperturbaciones de algun problema cuyas soluciones son ya conocidas. Sin em-bargo, el caso analizado, de resonancia en el autovalor nulo, no se aplica anuestros propositos de entender el teorema de Hopf. Conviene entonces repasarel metodo, pero ahora en un contexto mas general. Por simplicidad, manten-dremos por ahora la forma del problema anterior
LX = εNεX,
aunque el planteo puede generalizarse todavıa mas. La diferencia es que ahoraL : V → W es cualquier operador lineal de Fredholm de ındice 0, en el sentido deque los espacios de partida y llegada (para nuestras aplicaciones, CT en amboscasos) pueden escribirse respectivamente como sumas directas
V = ker(L)⊕ E, W = Im(L)⊕ F
con dim(ker(L)) = dim(F ) < ∞. Denotemos K : Im(L) → E el inverso aderecha de L y fijemos proyectores P : V → ker(L), Q : W → F y un isomor-fismo J : F → ker(L). Para ε 6= 0, la ecuacion LX = εNεX equivale, como enel caso anterior, a dos igualdades:
1. X − PX = εK(NεX −QNεX),
y la ecuacion de bifurcacion
2. QNεX = 0.
Observemos que se trata de ecuaciones en espacios diferentes, ası que para re-unirlas en una sola de la forma F(X, ε) = 0 como hicimos en el ejemplo previo,necesitamos hacer uso del isomorfismo J . Con esta idea en mente, definimos
F(X, ε) := X − PX − JQNεX − εK(NεX −QNεX)
y verificamos que se cumple lo que querıamos. En efecto, si para X ∈ CT valeF(X, ε) = 0, entonces aplicando P de ambos lados se deduce (pues PK = 0)que JQNεX = 0. Luego QNεX = 0 y X = PX + εKNεX, lo que muestra,aplicando L, que LX = εNεX. Recıprocamente, si X ∈ CT es solucion delproblema, entonces X − PX = εKNεX. Por otra parte, QLX = 0, de dondese deduce que εQNεX = 0 y, finalmente, F(X, ε) = 0.
A fin de aplicar ahora el teorema de la funcion implıcita, observemos comoantes que
F(X, 0) = 0⇔ X ∈ ker(L) y JQN0X = 0.
105

De este modo, podemos definir la funcion ϕ : ker(L) :→ ker(L) dada porϕ(X) := JQN0X, que permitira asegurar la existencia de soluciones para εchico, siempre que exista X0 ∈ ker(L) tal que
• ϕ(X0) = 0.
• Dϕ(X0) inversible.
Esto se ve exactamente igual que en el ejemplo anterior, pues se puedeverificar (esto queda como ejercicio) que
DXF(X0, 0)(ψ) = ψ − P (ψ)− JQ(DN0X0(ψ))
y luegoDXF(X0, 0)(ψ) = ξ ⇔ ξ = ψ − w
con w = Pψ + JQ(DN0X0(ψ)) ∈ ker(L). En consecuencia, la ultima igualdadequivale a
DXF(X0, 0)(w) = ξ −DXF(X0, 0)(ξ).
Pero tanto X0 como el w que buscamos estan en ker(L), de modo que
DXF(X0, 0)(w) = limh→0
JQ(N0(X0 + hw))− JQ(N0(X0))
h= Dϕ(X0)(w).
Esto prueba que existe un unico w que satisface lo pedido; de esta forma,DXF(X0, 0) es biyectiva y, por el teorema de la aplicacion abierta, se deduceque es un isomorfismo.
A modo de ejemplo, consideremos la ecuacion
u′′(t) + u(t) = εg(u(t), u(t− τ)) := εNu(t),
con N : C2π → C2π. En este caso Lu := u′′ + u, cuyo nucleo en C2π es elsubespacio generado por cos t, sen t, mientras que Im(L) es el complementoortogonal de ker(L) respecto del producto interno de L2(0, 2π), vale decir, elconjunto de aquellas ϕ ∈ CT tales que∫ 2π
0
ϕ(t)cos t dt =
∫ 2π
0
ϕ(t)sen t dt.33
En este caso vale, entonces, P = Q y J = Id. Para u ∈ kerL, es decir,u(t) = a cos t+ b sen t, calculamos ϕ(u) = QN(u) = α cos t+ β sen t, donde α yβ son los coeficientes de Fourier
α = α(u) :=1
π
∫ 2π
0
g(u(t), u(t− τ)) cos t dt,
β = β(u) :=1
π
∫ 2π
0
g(u(t), u(t− τ))sen t dt.
33Esto sale haciendo la cuenta o, mas directamente empleando la simetrıa de L.
106

Para aquellos que pensaban que la expresion ‘ignorar los isomorfismos’ no eramas que una forma de hablar, presentamos aquı un ejemplo bien tangible detal ignorancia, pensando directamente ϕ : R2 → R2 como ϕ(a, b) := (α, β). Deesta forma, la diferencial de ϕ se obtiene calculando las derivadas parciales; porejemplo, la derivada ∂α
∂a (a, b) vale:
1
π
∫ 2π
0
(∂g
∂x(u(t), u(t− τ)) cos2 t+
∂g
∂y(u(t), u(t− τ)) cos t cos(t− τ)
)dt.
Un caso especialmente sencillo esta dado por g(x, y) = y, es decir, la ecuacionlineal u′′(t) + u(t) = εu(t− τ), para la cual se obtiene la matriz ignorante
Dϕ(a, b) =1
π
( ∫ 2π
0cos t cos(t− τ) dt
∫ 2π
0sen t cos(t− τ) dt∫ 2π
0cos t sen (t− τ) dt
∫ 2π
0sen t sen (t− τ) dt
)
que milagrosamente (lease: haciendo cuentas) se transforma en
Dϕ(a, b) =
(cos τ sen τ−sen τ cos τ
).
En definitiva, la matriz sera ignorante pero al menos es inversible, lo que reflejael hecho obvio (¿por que?) de que la unica solucion para ε 6= 0 chico es latrivial. Pero ademas dice que para perturbaciones pequenas de g hay una unicasolucion 2π-periodica cerca del origen.
Pasemos ahora al teorema. Como dijimos, queremos aplicar lo anterior paraestudiar el comportamiento de un sistema X ′(t) = F (Xt, µ) cerca de un valor debifurcacion de Hopf. Recordemos que F es suave y vale F (0, µ) = 0 para todoµ, lo que permite escribir F (φ, µ) = L(µ)φ+R(φ, µ) donde L(µ) := DφF (0, µ)y R es el resto de Taylor. Sin perdida de generalidad, vamos a suponer queel valor de bifurcacion es µ = 0, lo que nos lleva a formular nuestra principalhipotesis de la siguiente manera:
(H1) La ecuacion lineal X ′(0) = L(0)Xt tiene una raız caracterıstica simple ypuramente imaginaria λ0 = iν0 con ν0 > 0.
Para fijar ideas, supongamos por un momento que se trata de una ecuacionescalar, de modo que la hipotesis anterior dice que cos(ν0t) y sen (ν0t) estanen el nucleo del operador x′ − L(0)x en el espacio de funciones T0-periodicas,donde T0 := 2π
ν0. Pero, ademas, queremos que no haya mas cosas en ese nucleo,
de modo que impondremos una hipotesis adicional: para cualquier otra raızcaracterıstica λ 6= ±iν0 vale
λ 6= mλ0 ∀m ∈ Z. (29)
En efecto, si λ = imν0 fuera raız caracterıstica para algun m > 1, entoncescos(mν0t) y sen(mν0t) serıan soluciones 2π
mν0-periodicas que, en particular, perte-
necen al espacio CT0 .
107

Como vimos en la seccion 6, la ecuacion caracterıstica es
h(λ, µ) := det(λI − L(µ)λ) = 0,
ası que nuestra primera hipotesis dice que h(λ0, 0) = 0 y ∂h∂λ (λ0, 0) 6= 0, en
donde (aclaramos, por las dudas) ∂∂λ se usa para denotar la derivada de h(·, 0)
como funcion de variable compleja. Por el teorema de la funcion implıcita(la gran estrella de estos ultimos tiempos), existen µ0 > 0 y una curva suaveλ : (−µ0, µ0)→ C tal que λ(µ) es raız caracterıstica simple de L(µ) y λ(0) = λ0.Achicando µ0 si hace falta, podemos suponer que Im(λ(µ)) 6= 0, es decir, que lacurva λ(µ) se mantiene en el semiplano (abierto) superior. La siguiente hipotesisconsiste en que ademas sea transversal al eje imaginario, lo que se traduce en unacondicion sencilla: Re(λ′(0)) 6= 0. Por conveniencia, invirtiendo la orientacionde µ si hace falta, podemos suponer tambien que
Re(λ′(0)) > 0, (30)
es decir, la curva pasa del segundo cuadrante al primero por el valor λ0 (la rimaes involuntaria. Hasta aquı, venıamos hablando en prosa sin saberlo).
Como anticipamos, la idea es emplear el teorema de la funcion implıcita paradeducir la existencia de una rama de soluciones T -periodicas no constantes, conT cercano a T0 y µ chico. Esto nos permite retomar una pregunta que de-jamos picando unas paginas atras: ¿de que sirve haber aprendido a encontrarsoluciones con perıodo fijo, si en realidad va a ser variable y -para peor-, vayauno a saber de que manera? Pero aquı es donde recobramos nuestra tan promo-cionada (en realidad algo inflada... ası es el marketing) sangre frıa para proponerla transformacion Y (t) = X(ηt) con η cercano a 1.
Ası, el problema original
X ′(t) = F (Xt, µ) (31)
se convierte en uno equivalente con perıodo fijo. Pero no todo es soplar y hacerbotellas: a causa del retardo, nos veremos obligados a efectuar unos retoques.En efecto, al reemplazar en la ecuacion obtenemos
Y ′(t) = ηX ′(ηt) = ηF (Xηt, µ)
que no es igual a ηF (Yt, µ), como ingenuamente podıamos esperar. Sin embargo,la cosa se arregla observando que
Xηt(θ) = X(ηt+ θ) = X(η(t+ θ
η
))= Y
(t+ θ
η
).
Luego, el nuevo problema a considerar es
Y ′(t) = ηF (Yt,η, µ) (32)
donde Yt,η(θ) := Y (t+ θη ). De acuerdo con la definicion,
Y (t+ T0) = X(η(t+ T0)) = X(ηt+ ηT0),
108

de modo que X es ηT0-periodica si y solo si Y es T0-periodica.Teniendo en cuenta el desarrollo de Taylor de primer orden para F y el hecho
de que suponemos η cercano a 1, la idea consiste en pensar la ecuacion (32)como una perturbacion de la ecuacion lineal Y ′(t) = L(0)Yt. En otras palabras,consideraremos el espacio CT0
y el operador resonante LY := Y ′(t) − L(0)Yt.La ecuacion se escribe entonces como
LY = Nµ,ηY,
con
Nµ,ηY (t) = ηF (Yt,η, µ)− L(0)Yt = ηL(µ)Yt,η − L(0)Yt + ηR(Yt,η, µ)
donde R es el resto de Taylor. Y, como se puede adivinar, las hipotesis estanpuestas para que todo funcione bien. Para el lector rebosante de optimismo,cabe aclarar que la aplicacion del metodo anterior para η ≈ 1 y µ ≈ 0 no esinmediata.34 Pero apelando a la solidaridad o, mejor, a la fe ciega del lectorobtenemos (dijo el mosquito) el teorema de Hopf:
Teorema 10.1 Supongamos que valen (H1), (29) y (30). Entonces existenε0 > 0, funciones pares µ(ε) ≥ 0 y T (ε) > 0 para |ε| < ε0 con µ(0) = 0, T (0) =T0 := 2π
ν0y soluciones T (ε)-periodicas no constantes pε = εqε del problema
(31), con q0 una solucion T0-periodica del problema lineal X ′ = L(0)Xt. Masaun, estas soluciones son localmente unicas salvo cambios de fase, es decir:existen µ0, β0, δ > 0 tales que si X es una solucion T -periodica para algunµ ∈ (−µ0, µ0) tal que ‖x‖∞ < β0 y |T − T0| < δ entonces X(t) = pε(t + s, ε)para algun ε ∈ (−ε0, ε0) y algun s.
La demostracion rigurosa se puede mirar en el libro de Hale (en caso dedificultad, siempre queda el recurso extremo de invocar aquel celebre precepto:se mira y no se toca). Pero para los objetivos de este trabajo es suficienteobservar que se ve reflejada la situacion que anticipamos, en forma intuitiva, enlas paginas previas. A decir verdad, el teorema dice un poco mas: al mirar la‘letra chica’, vemos que en realidad la perturbacion se escribe en terminos de unparametro ε; de esta forma, tanto µ como el perıodo T = ηT0 de las solucionesobtenidas son funciones de ε. Esto da la pista justamente de como se bifurcauna rama de soluciones a partir de un elemento del nucleo de L, que es el q0 delenunciado.
Concretamente, el teorema nos asegura que existe un intervalo (−ε0, ε0) yfunciones pares µ(ε) ≥ 0 y T (ε) = η(ε)T0 > 0; en rigor, si se pide mayorsuavidad para F entonces se puede decir algo todavıa mas preciso:
µ(ε) = µ1ε2 +O(ε4)
T (ε) = T0[1 + τ1ε2 +O(ε4)].
34A modo de entretenimiento, se puede observar en primer lugar que ahora L no es simetricorespecto del producto de L2, ası que para encontrar su imagen habrıa que calcular su adjunta.
109

Cabe mencionar, ademas, que estos desarrollos son algo mas que una ‘carabonita’, pues en realidad brindan informacion adicional sobre la estabilidad delas soluciones (entendida de la misma forma en que definimos la estabilidadde un equilibrio). En efecto, si todas las otras raıces caracterısticas para µ = 0tienen parte real negativa, entonces pε es asintoticamente estable cuando µ1 > 0(bifurcacion supercrıtica) e inestable cuando µ1 < 0 (bifurcacion subrcrıtica).Por supuesto, puede ocurrir tambien que µ1 = 0: el caso extremo es el de laecuacion lineal
x′(t) =(µ− π
2
)x(t− 1)
para la cual µ ≡ 0 y T ≡ 4. Cosa bastante evidente, por otra parte, ya quelas soluciones 4-periodicas para µ = 0 son combinaciones lineales de cos
(πt2
)y
sen(πt2
). Tales objetos se pueden escribir en la forma x(t) = ρ cos
(πt2 − ω
), de
modo que se verifica la tesis del teorema con qε(t) := cos(πt2
).
A modo de ejemplo algo mas sofisticado, veamos como calcular de maneracuidadosa (bah, ¡mas o menos!) la bifurcacion de Hopf para la ecuacion
x′(t) = −αx(t− 1)(x(t) + 1). (33)
A pesar de tratarse de un problema mas simple que la ecuacion algo sospechosaque vimos al comienzo de la seccion, la existencia de soluciones periodicas noconstantes no es tan facil de probar de manera directa (el lector interesado puedeverlo -y tocarlo- en el libro de Hale). La linealizacion da, otra vez, una ecuacionque ya conocemos bien,
x′(t) = −αx(t− 1),
que tiene raıces caracterısticas simples ±π2 i para α = π2 , mientras que las
restantes raıces caracterısticas tienen parte real negativa (ver seccion 3). Paraubicarnos en el contexto del teorema, llamemos µ = α− π
2 y entonces resulta:
h(λ, µ) = λ+(µ+
π
2
)e−λ.
Derivando en forma implıcita en µ = 0 la igualdad h = 0 se obtiene
λ′(0) + e−λ(0) − π
2λ′(0)e−λ(0) = 0
y, teniendo en cuenta que λ(0) = π2 i, calculamos:
λ′(0) =i
1 + π2 i
=π2 − i
1 +(π2
)2 .En consecuencia, Re(λ′(0)) > 0, ası que todas las hipotesis del teorema deHopf se satisfacen... ¡Bravo! Pero al cabo de tanta satisfaccion, no esta malpreguntarse: ¿de que tipo de bifurcacion se trata? El teorema nos dice que paraε chico existen µ(ε) y soluciones T (ε)-periodicas no constantes con T (ε) cercanoa 2ππ/2 = 4 y µ(ε) ≈ µ1ε
2. Nuestra satisfaccion llegarıa a niveles nunca antes
110

alcanzados si pudieramos conocer al menos el signo de µ1, para poder decir silas soluciones obtenidas son estables (o se hacen).
Veamos, en primer lugar, quien podrıa jugar el papel de q0. Segun men-cionamos pocos parrafos atras, los elementos del nucleo del operador Lx(t) :=x′(t) + π
2x(t− 1) en el espacio C4 de funciones 4−periodicas se pueden escribiren la forma ρ cos
(π2 t− ω
). Ademas, como buscamos despues soluciones de la
pinta εqε, el valor ρ se lo podemos enchufar al ε y, mediante un elegante cambiode fase, podemos suponer que ω = 0. En definitiva, todo esto para decir quenuestro punto de partida va a ser, lisa y llanamente, q0(t) := cos
(π2 t).
Por otra parte, vimos que la manera de transformar soluciones de perıodo“casi” igual a 4 en soluciones 4-periodicas consiste en definir y(t) := x(ηt), demodo que la ecuacion se convierte en
y′(t) = ηx′(ηt) = −ηαx(ηt− 1)(x(ηt) + 1) = −ηαy (t− 1/η) (y(t) + 1).
Es un posible ejercicio escribir desarrollos apropiados para y(t), µ y η, paraintentar deducir el signo de µ1. Sin embargo, el metodo mas eficiente de lograresto consiste en esperar un poco, pues el resultado se deduce de manera directadel ejemplo mas general que veremos a continuacion.
10.3 La ecuacion con feedback negativo
En esta seccion analizaremos la bifurcacion de Hopf para la ecuacion
x′(t) = −f(x(t− τ))
con f suave tal que f(0) = 0 y f ′(0) = 1. Para ponerlo en terminos delproblema (31), aclaremos que aquı el parametro es τ ; por comodidad, podemosllamar u(t) := x(τt) a fin de transformar la ecuacion en otra con retardo fijo:
u′(t) = τx′(τt) = −τf(x(τt− τ)) = −τf(u(t− 1)). (34)
Como sea, uno tiene el derecho de preguntarse de que extrana manera estaecuacion es, segun dijimos, ‘mas general’ que el ejemplo de la seccion anterior.Pero es recomendable no perder la calma y observar, en primer lugar, que si xes una solucion de (33) tal que x(0) > −1, entonces x(t) > −1 para todo t > 0.Esto se prueba mas o menos igual que en situaciones anteriores: integrando laecuacion, se ve, para t > 0,
x(t) + 1 = (x(0) + 1)e−α∫ t0x(s−1) ds > 0.
De esta forma, si lo que nos interesa es estudiar la dinamica cerca del origen,podemos escribir u(t) = ln(x(t) + 1) y la ecuacion resultante es
u′(t) = −αx(t− 1) = −α(eu(t−1) − 1
),
que tiene la misma forma que (34) con α = τ y f(u) = eu − 1. Notar quef(0) = 0 y f ′(0) = 1: al menos en este caso, podemos afirmar que no se nos haescapado ningun detalle.
111

A fin de estudiar la ecuacion (34) notemos, para empezar, que el desarrollode Taylor de f es f(u) = u + R(u), de modo que la linealizacion es la mismaque antes: x′(t) = −τx(t− 1). Luego, para µ = τ − π
2 se cumplen las hipotesisdel teorema de Hopf. Y, al igual que en el caso previo, podemos suponer quenuestra rama de soluciones εqε(t) arranca a partir de q0(t) = cos
(π2 t).
A continuacion, teniendo en cuenta que el problema se piensa como unaperturbacion de la ecuacion u′(t) = −π2u(t − 1), necesitamos saber cual es laimagen del operador Lu := u′(t) + π
2u(t − 1). Por supuesto, la respuesta serıainmediata si L fuera simetrico respecto del producto de L2(0, 4), pero eso noocurre; sin embargo, se puede observar que aquı el operador adjunto L∗ es muyfacil de calcular, pues si u y v son 4-periodicas entonces∫ 4
0
Lu(t)v(t) dt =
∫ 4
0
[u′(t)+π
2u(t−1)]v(t) dt =
∫ 4
0
u(t)[−v′(t) +
π
2v(t+ 1)
]dt.
Podrıa parecer preocupante que en un texto sobre ecuaciones con retardo nosveamos obligados a incluir una ecuacion ‘avanzada’ de la forma v′(t) = π
2 v(t+1);sin embargo, queda claro que la teorıa completa de ecuaciones con retardo debeincluir tambien los retardos negativos. En definitiva, L∗u = −u′(t)+ π
2u(t+1) y,al calcular la ecuacion caracterıstica −λ+ π
2 eλ = 0 vemos (quizas sin demasiada
sorpresa) que ker(L∗) = ker(L). En efecto, cambiando λ por −λ se obtienela ecuacion caracterıstica asociada a L y, en consecuencia, los dos operadorestienen las mismas raıces caracterısticas pero con signos opuestos. Pero cuandose trata de buscar soluciones periodicas hay que mirar las raıces que caen sobreel eje imaginario, para las cuales invertir el signo es lo mismo que conjugar.En resumen, como la imagen de L es un conjunto cerrado, podemos lanzar lasiguiente afirmacion, un tanto temeraria:
Im(L) = ker(L∗)⊥ = ker(L)⊥.
Antes de continuar, pensemos un poco: si estamos en C4, ¿de que complementoortogonal estamos hablando? Obviamente, se trata de mirar las cosas ahoradentro de L2(0, 4) aunque, en ese caso, para que la anterior afirmacion seacierta, tendrıamos que poder asegurar que Im(L) es un subespacio cerrado...cosa que sabıamos, pero no en L2 sino en C4. De hecho, esto nunca va a sercierto a menos que redefinamos L en un conjunto mas apropiado (¿cual?).
En fin, son muchas las objeciones: mas que temeraria, la afirmacion haceagua por todos lados y nos trae un nostalgico recuerdo del methodus Brutusimplementado unas cuantas paginas atras. Pero como aquel entonces, la con-clusion es esencialmente correcta pues, ajustando los detalles correspondientes(como de costumbre, la tarea sucia queda para el lector) se puede verificar que laimagen de L esta efectivamente dada por aquellas funciones periodicas que sonortogonales (en el sentido de L2) a las funciones cos
(π2 t)
y sen(π2 t), es decir:
Im(L) =
y ∈ C4 :
∫ 4
0
y(t) cos(π
2t)dt =
∫ 4
0
y(t)sen(π
2t)dt = 0
.
112

Por supuesto, para evitar suspicacias, es posible hacer tambien la cuenta de man-era directa empleando (por ejemplo) el desarrollo de Fourier. Por comodidad,vamos a emplear la base compleja en := ein
π2 tn∈Z. Escribiendo x =
∑xnen,
la ecuacion x′(t) + π2x(t− 1) = ϕ(t) se transforma en
π
2
∑n∈Z
xn(in+ (−i)n)en = ϕ =∑
ϕnen.
Como in + (−i)n se anula si y solo si n = ±1, se deduce que la condicionnecesaria y suficiente para que haya solucion es que ϕ±1 = 0. En otras palabras(presten atencion, los desconfiados), ϕ debe ser ortogonal a cos(π2 t) y sen(π2 t).La solucion se calcula entonces despejando los coeficientes de x:
xn =2
π
ϕnin+ (−i)n
. (35)
Pasemos ahora a las cuentas especıficas de la bifurcacion de Hopf. Escribiendocomo antes y(t) = x(ηt), la ecuacion se convierte en
y′(t) = −ητf (y(t− 1/η)) . (36)
La solucion que buscamos es de la forma
y(t) = εq0(t) + ε2y1(t) + ε3y2(t) + . . .
con q0 = cos(π2 t)
y las funciones yj ortogonales a cos(π2 t) y sen(π2 t). Ademas,el teorema nos dice que
τ =π
2+ µ1ε
2 +O(ε4)
η = 1 + η1ε2 +O(ε4).
Observemos que se puede escribir
1
η=
1
1− [−η1ε2 +O(ε4)]=∑k≥0
[−η1ε2 +O(ε4)]k = 1− η1ε
2 +O(ε4)
de modo que
y
(t− 1
η
)= y(t− 1) + y′(t− 1)η1ε
2 +O(ε4).
Vamos a reemplazar ahora todo en la ecuacion (36). Lo que queda no es muyalentador, pero hay que tener paciencia:
εq′0(t) + ε2y′1(t) + ε3y′2(t) +O(ε4) = −ητf(y(t− 1/η)
= −(π
2+ (η1 + µ1)ε2 +O(ε4)
)f(y(t− 1) + y′(t− 1)η1ε
2 +O(ε4))
113

Si ahora desarrollamos en serie de Taylor
f(y) = y +f ′′(0)
2y2 +
f ′′′(0)
6y3 + . . .
y luego igualamos los terminos correspondientes a εj para j ≤ 3, resulta:
q′0(t) = −π2q0(t− 1).
¡Vaya novedad! Esto ya lo sabıamos, pues q0(t) = cos(π2 t). Pasemos al termino
siguiente:
y′1(t) = −π2
[y1(t− 1) +
f ′′(0)
2q20(t− 1)
]es decir
y′1(t) = −π2
[y1(t− 1) +
f ′′(0)
2sen2
(π2t)]
Como y1 es ortogonal a cos(π2 t)
y sen(π2 t), empleando la formula (35) se obtiene
(de manera unica) y1. Finalmente, queda la ecuacion para y2, que es todavıaun poco mas fea:
y′2(t) = −π2
[y2(t− 1) + η1q
′0(t− 1) +
f ′′′(0)
6q30(t− 1)
]+ (η1 + µ1)q0(t− 1).
Mas y mas cuentas (que pasaremos disimuladamente por alto, pero pueden versecon lujo de detalles en [8]) llevan por fin a la siguiente conclusion:
sgn(µ1) = sgn[f ′′(0)2(11π − 4)− 5πf ′′′(0)
].
Llegado este punto, debemos confesar que, sin hacer las cuentas (o tener a manoun guru muy certero) no es facil adivinar de antemano el resultado previo contanta precision. Pero, a grandes rasgos, podemos decir que la bifurcacion essubcrıtica si f ′′(0)2 es ‘grande’ en comparacion con f ′′′(0) y subcrıtica en casocontrario.
10.4 Ejercicios
1. Analizar la estabilidad y la direccion de la bifurcacion de Hopf para laecuacion (34) con f una funcion impar.
2. Estudiar la bifurcacion de Hopf para el equilibrio positivo de la ecuacionde Nicholson (ver ejercicio 2 de la seccion 6). Idem para los modelos delejercicio 2 de la seccion 8.
3. Decidir en que casos se verifican las hipotesis del teorema de bifurcacionde Hopf para el caso de una ecuacion de segundo orden de la forma
x′′(t) + ax′(t− τ) + bx(t) = 0
114

con a, b > 0. Sugerencia: reescalar la ecuacion para que quede τ = 1.Encontrar la ecuacion caracterıstica y analizar la bifurcacion de Hopf parael mınimo valor τ0 > 0 tal que existe una raız caracterıstica puramenteimaginaria.
115

11 Apendice
11.1 Repaso de ecuaciones ordinarias (ejercicios)
1. Existencia:
Sean Ω ⊂ R × Rn un abierto, (t0, x0) ∈ Ω y f : Ω → Rn una funcioncontinua, localmente Lipschitz en x. Entonces el problema
x′ = f(t, x)x(t0) = x0
(37)
admite una (unica) solucion x : [t0 − δ, t0 + δ] → Rn para cierto δ > 0.Dar una cota inferior para δ.
2. Lema de Gronwall - Unicidad:
(a) Sean u, v : [t0, t1]→ R≥0 continuas tales que
u(t) ≤ α+
∫ t
t0
u(s)v(s) ds
para todo t y cierto α ≥ 0. Entonces
u(t) ≤ αe∫ tt0v(s) ds
para todo t. Deducir que si x, y : J → Rn son soluciones de (37) conf como en el ejercicio 1 y el intervalo J es un entorno de t0, entoncesx = y.
(b) Extender la desigualdad de Gronwall para una funcion α = α(t)creciente.
3. Dependencia continua:
Sean f y x como en el ejercicio 1, y consideremos un punto (t0, x0) ∈Br(t0, x0) para r > 0 suficientemente pequeno. Probar que la solucion xdel problema
x′ = f(t, x)x(t0) = x0
verifica|x(t)− x(t)| ≤ αeL|t−t0|
para ciertas constantes α = α(t0, x0), L ≥ 0, y t cerca de t0, en donde αverifica: α(t0, x0)→ 0 para (t0, x0)→ (t0, x0).
(a) Deducir que el flujo Φ definido por Φ(t, t0, x0) := x(t) es una funcioncontinua.
(b) Probar que si f es de clase C1 entonces Φ es de clase C1.
116

4. Extension de soluciones - Intervalo maximal:
Sean Ω, (t0, x0) ∈ Ω, f como en el ejercicio 1, y sea K ⊂ Ω un compacto.
(a) Probar que si una solucion de x′ = f(t, x) definida en [t0, t1) no sepuede extender hasta t1, entonces existe δ > 0 tal que (t, x(t)) /∈ Kpara t ∈ (t1 − δ, t1).
(b) Concluir que si [t0, t1]× Rn ⊂ Ω entonces |x(t)| → ∞ para t→ t−1 .
(c) Probar que existe un unico intervalo abierto I que contiene a t0 yuna unica solucion x : I → Rn que no se puede extender fuera de I.
5. Probar que si f : [t0, t1] × Rn → Rn es continua, localmente Lipschitz enx y tiene crecimiento a lo sumo lineal en x (es decir, |f(t, x)| ≤ a|x|+ b),entonces toda solucion del problema x′ = f(t, x) puede extenderse a todoel intervalo [t0, t1].
6. Sea f : [t0, t1]×Rn → Rn continua y globalmente Lipschitz en x con con-stante L, y consideremos el operador T : C([t0, t1],Rn) → C([t0, t1],Rn)definido por
Tx(t) = x0 +
∫ t
t0
f(s, x(s)) ds.
Probar que para x, y ∈ C([t0, t1],Rn) se tiene:
‖Tnx− Tny‖ ≤ (t1 − t0)nLn
n!‖x− y‖,
en donde Tn = T . . . T (n veces). Deducir que si n es grande, Tn esuna contraccion y tiene, en consecuencia, un unico punto fijo. ¿Tiene estoalguna relacion con el ejercicio 5?
7. Estabilidad:
Sea f : R → R localmente Lipschitz y sea x una solucion del problemax′(t) = f(x(t)) definida en un entorno de t = 0. Probar:
(a) Si f(x(0)) 6= 0 entonces x es una funcion estrictamente monotona.
(b) Si x(0) ∈ (a, b), con a < b dos ceros consecutivos de f , entonces xesta definida en [0,+∞) y vale
limt→+∞
x(t) = a o limt→+∞
x(t) = b.
(c) Sea e un cero de f . Probar que si f ′(e) < 0 entonces e es un equilibrioasintoticamente estable y si f ′(e) > 0 entonces es inestable.
117

11.2 Repaso general
Revisar los siguientes temas:
1. Diferenciacion en el sentido de Frechet.
2. Teorema de la Funcion Implıcita.
3. Teorema de Arzela-Ascoli.
4. Funciones analıticas.
5. Teorema de residuos.
6. Teorema de Rouche.
7. Transformada de Laplace.
References
[1] R. Bellman, K. Cooke, Differential-Difference Equations, Academic Press,1963.
[2] C. Corduneanu, Almost periodic functions. Interscience Publishers, NewYork-London-Sydney, 1968.
[3] I. Gyori, G. Ladas, Oscillation Theory of Delay Differential Equations withApplications. Oxford Science Publications, Clarendon Press, Oxford, 1991.
[4] J. Hale, Theory of Functional Differential Equations. Springer-Verlag, NewYork, 1977.
[5] C. Rogers: A Less Strange Version of Milnors Proof of Brouwers Fixed-PointTheorem. The American Mathematical Monthly, Vol. 87, 7 (1980), 525-52.
[6] R. Ortega, Degree theory and almost periodic problems. Differential equa-tions, chaos and variational problems, vol. 75 of Progr. Nonlinear DifferentialEquations Appl., 345–356. Birkhauser, Basel, 2008.
[7] W. Rudin, Analisis Real y Complejo. Pearson, 1985.
[8] H. Smith, An Introduction to Delay Differential Equations with Applicationsto the Life Sciences, Springer-Verlag, New York, 2011.
[9] N. Sternberg, A Hartman-Grobman Theorem for a Class of Retarded Func-tional Differential Equations. Journal of Mathematical Analysis and Appli-cations 176 (1993), 156–165.
118








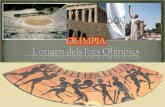
![Apuntes matemáticos para leer a Lacan 1. Topología [Pablo Amster]](https://static.fdocuments.ec/doc/165x107/577c78f51a28abe054911293/apuntes-matematicos-para-leer-a-lacan-1-topologia-pablo-amster.jpg)