
S.E.P. S.E.I.T. D.G.I.T. CENTRO NACIONAL DE ... - … Santiago... · Las partes que componen al...
131
S.E.P. S.E.I.T. D.G.I.T. CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO cenidet CONTROL INTELIGENTE DEL FRENADO EN PROPULSIÓN ELÉCTRICA CON REGENERACIÓN T E S I S PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN INGENIERÍA MECATRÓNICA P R E S E N T A LIC. SANTIAGO CHOLULA SORIANO DIRECTORES DE TESIS: Dr. JOSÉ RUIZ ASCENCIO Dr. ABRAHAM CLAUDIO SÁNCHEZ CUERNAVACA, MORELOS AGOSTO 2005
Transcript of S.E.P. S.E.I.T. D.G.I.T. CENTRO NACIONAL DE ... - … Santiago... · Las partes que componen al...

S.E.P. S.E.I.T. D.G.I.T.
CENTRO NACIONAL DE INVESTIGACIÓN
Y DESARROLLO TECNOLÓGICO
cenidet
CONTROL INTELIGENTE DEL FRENADO EN
PROPULSIÓN ELÉCTRICA CON REGENERACIÓN
T E S I S PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
EN INGENIERÍA MECATRÓNICA
P R E S E N T A
LIC. SANTIAGO CHOLULA SORIANO
DIRECTORES DE TESIS: Dr. JOSÉ RUIZ ASCENCIO
Dr. ABRAHAM CLAUDIO SÁNCHEZ
CUERNAVACA, MORELOS AGOSTO 2005

RESUMEN Este trabajo aborda el ahorro de energía en los sistemas de propulsión eléctrica a través del concepto de frenado regenerativo, que involucra la conversión de la energía cinética en electricidad. Las partes que componen al sistema son un motor de inducción (MI) (jaula de ardilla) de corriente alterna, y el sistema mecánico (volante de inercia) representando simbólicamente la inercia del automóvil. La meta es probar el potencial y evaluar el desempeño de un control inteligente de espacio de estados y compararlo con un esquema de control convencional. El control convencional sirve para la generación de muestras de las señales de entradas y salidas que permiten identificar la dinámica del sistema. Este último también es usado como referencia al desempeño del control inteligente.
ABSTRACT This work approaches the saving of energy in electrical propulsion systems through the concept of regenerative braking, that involves the conversion of kinetic energy into electricity. The parts that compose the system are an alternating current induction motor (MI) (squirrel cage), and the mechanical system (flywheel) used to model the inertia of the automobile. The goal is to prove the potential and evaluate the performance of a state space intelligent control and to compare it with a scheme of conventional control. The conventional control will be used for the generation of samples of the input and output signals that allow identification of the dynamics of the system. The latter is also used as a reference for the performance of the intelligent control.
i
ÍNDICE SIMBOLOGÍA v ACRÓNIMOS y SIGLAS viii LISTA DE FIGURAS ix LISTA DE TABLAS xi Capítulo 1 ANTECEDENTES 1.1. PLANTEAMIENTO DEL PROBLEMA 2 1.2. JUSTIFICACIÓN 2 1.3. OBJETIVO 2
1.3.1. Objetivos específicos 2 1.4. ALCANCES 3 1.5. LIMITACIONES 3 1.6. APORTACIONES 3 1.7. ESTADO DEL ARTE 4 1.8. PLAN DE EXPOSICIÓN 7 Capítulo 2 MODELADO DEL SISTEMA ELECTROMECÁNICO 2.1. ECUACIÓN DINÁMICA DEL SISTEMA ELÉCTRICO 9
2.1.1. Principio de operación 9 2.1.2. Análisis del motor de inducción 10
2.1.2.1. Ecuaciones del MI trifásico 10 2.1.2.2. Introducción a la teoría del marco de referencia 12 2.1.2.3. Representación del MI trifásico en el MRA 14 2.1.2.4. Par electromagnético 16
2.1.3. Transferencia de potencia 17 2.1.3.1. Característica par-velocidad del motor de inducción 18
2.2. COMPARACIÓN DEL SISTEMA MECÁNICO CON LA MASA VEHICULAR 19 2.3. ECUACIÓN DINÁMICA DEL SISTEMA MECÁNICO 21
2.3.1. Leyes de Newton 21 2.3.2. Modelo dinámico del sistema mecánico 22
2.4. MODELADO DEL SISTEMA ELECTROMECÁNICO 23 Capítulo 3 ESTRATEGIAS DE CONTROL 3.1. CONTROL CONVENCIONAL 25 3.2. CONTROL INTELIGENTE 28
3.2.1. Concepto de inversión 28 3.2.2. Concepto de variables de estado 29

ii
3.2.3. Núcleo hibrido de transición de estados (NHTE) 31 3.2.4. Obtención del control inteligente 34
Capítulo 4 RESULTADOS DE SIMULACIÓN 4.1. VALIDACIÓN DEL MODELO DEL MI EN LAZO ABIERTO 37 4.2. SIMULACIÓN EN LAZO CERRADO 41
4.2.1. Obtención del control inteligente 42 4.2.2. Análisis comparativo del control convencional e inteligente 43 4.2.1. Validación de la simulación 49 4.2.2. Energía 50 4.2.3. Planta con perturbación 52 4.2.4. Simulación ampliada sin perturbación 56
4.5. ANÁLISIS DE RESULTADOS DE SIMULACIÓN 60 Capítulo 5 CONCLUSIONES 61 ANEXO 1 SISTEMA ELÉCTRICO A1.1. Determinación de las inductancias de la MI 63 A1.2. Ecuaciones del MI 65 A1.3. Excitación trifásica para el modelo del MI 68 ANEXO 2 SISTEMA MECÁNICO A2.1. Cantidad de movimiento 71
A2.1.1. Ecuaciones de movimiento 71 A1.1.2. Equilibrio dinámico 71
A2.2. Cinemática de cuerpos rígidos 72 A2.2.1. Sistema racional mecánico 72 A2.2.2. Relaciones de energía de elementos rotacionales mecánicos 74
A.2.3. Representación mecánica del MI 75 A2.4. Análisis del sistema mecánico 76 ANEXO 3 CONTROL CONVENCIONAL A3.1. Reglas de Ziegler-Nichols 79

iii
ANEXO 4 SISTEMA DIFUSO A4.1. Introducción a la lógica difusa 81 A4.2. Conjunto difuso 82 A4.3. Representación del conocimiento 83 A4.4. Razonamiento aproximado 84 A.4.5. Control difuso 84
A4.5.1. Sistema de inferencia 85 A4.6. ANFIS 88 ANEXO 5 IMPLEMENTACIÓN EN SIMULINK® A5.1. Implementación de las ecuaciones del sistema electromecánico 91 A5.2. Implementación de las ecuaciones de potencia 92 A5.3. Implementación de la excitación trifásica para el modelo del MI 94 A5.4. Implementación del sistema (plata) 95 A5.5. Implementación del control convencional 95 A5.6. Implementación del control inteligente 96 A5.7. Implementación del sistema (planta) con el control convencional e inteligente 97 ANEXO 6 SINTONIZACIÓN DE LAS REGLAS A6.1. Resultados de ANFIS 99 ANEXO 7 ANÁLISIS NUMÉRICO A7.1. Validación de la simulación en lazo cerrado 105 A7.2. Par del sistema mecánica 105 A7.3. Potencia del sistema 107 ANEXO 8 ANÁLISIS DE POTENCIA 109 REFERENCIAS 115

v
SIMBOLOGÍA a, d2α/dt2 Aceleración angular dωr/dt Aceleración angular del rotor dωref / dt Aceleración de referencia dωm / dt Aceleración mecánica del sistema (planta) Amp Amplitud del voltaje Amp(k) Amplitud del voltaje muestreada en un tiempo ∆t θd Ángulo entre el eje sa y el eje sd xi Antecedente-iésimo mv Cantidad de movimiento fD, B Coeficiente de fricción mc Columna (relacionado matriz) yr Consecuente ó Salida deseada r Coordenada de ubicación de la fuerza ca Corriente alterna cd Corriente directa isd, isq, is0 Corrientes en el marco dq0 del estator ird, irq, ir0 Corrientes en el marco dq0 del rotor isabc Corriente trifásica aplicado a los devanados estator irabc Corriente trifásica aplicado a los devanados rotor sa, sb, sc Devanados del estator ra, rb, rc Devanados del rotor WKE Energía cinética almacenada en la masa WB Energía disipada en el amortiguador Ee Energía de entrada en el estator, Ere Energía disipada en la resistencia del devanado del estator, Emag Energía disipada por el campo magnético en el núcleo, Err Energía disipada en la resistencia del devanado del rotor, Es Energía de salida en el sistema mecánico. WPE Energía potencial almacenada en el resorte e(t) Error durante el tiempo X(t) Estado inicial X(t-T) Estado siguiente (x1, ...,xn, yr) Estructura de los estados del sistema nf Filas (relacionado a matrices) λsabc Flujo magnético en estator trifásico λsdq0 Flujo magnético en estator en el marco dq0 λrabc Flujo magnético en rotor trifásico λrdq0 Flujo magnético en rotor en el marco dq0 f1 Frecuencia de tensión y de corriente de alimentación F Fuerza de accionamiento Fext Fuerza externa Fint Fuerza interna μF(u) Función de pertenencia h(o) Ganancia directa de lazo KI Ganancial integral KP Ganancia proporcional
vi
hr Hora Lls Inductancias de dispersión de los devanados de estator Llr Inductancias de dispersión de los devanados de rotor Lm Inductancia mutua Lsab, Lsbc, Lsca Inductancia mutua entre la fase sa y sb, sb y sc, y sc y sa Ls Inductancia propia de los devanados de estator Lr Inductancia propia de los devanados de rotor J1 Inercia del disco de frenos J Inercia del rotor J0 Inercia del volante [t, t+T) Intervalo Km Kilómetro l Longitud axial del entrehierro g Longitud uniforme del entrehierro m Masa nf×mc Matriz de nf-filas por mc-columnas Tdq0(θd) Matriz de transformación f (o) Modelo de la planta q Número de antecedentes Ck Número de conjuntos o premisas p Número de polos Nreglas Número de reglas de aprendizaje Ns Número de vueltas del devanado del estator Nr Número de vueltas del devanado del rotor Tbd Par aplicado a la chumacera debido al disco de freno Tbr Par aplicado a la chumacera debido al rotor Tbv Par aplicado a la chumacera debido al volante de inercia Tf Par aplicado a la flecha Tjd Par aplicado al disco de freno Tjr Par aplicado al rotor Tjv Par aplicado al volante de inercia T0 Par de carga TL Par del freno mecánico TL(k) Par del freno mecánico muestreado en un tiempo ∆t Te Par electromagnético del MI Tm Par electromagnético de la planta Mext Par externo Mint Par interno Pre Pérdida de potencia en el cobre del estator Prr Pérdida de potencia en el cobre del rotor Pmag Pérdida de potencia magnética en el entrehierro Pa Pérdida de potencia por aire Pf Pérdida de potencia por fricción Tu Periodo de la oscilación consecutiva de amplitud constante. µo Permeabilidad en el entrehierro PP Planta α, α1, α2 Posición angular θr Posición angular del rotor Pe Potencia de entrada del sistema (planta) PB Potencia disipada en el amortiguador

vii
Pm Potencia mecánica Ps Potencia de salida del sistema (planta) rad Radianes r Radio a la mitad del entrehierro rv Radio del volante φ Relación de estados S[], F Relación entre entradas y salidas Rs Resistencias de estator Rr Resistencias de rotor rpm Revoluciones por minuto ys Salida de la planta seg Segundo u(t-∆T) Señal de control yref(t), ref Señal de referencia abc Sistema de variables originales dqo Sistema de variables resultantes t Tiempo ∆t, T Tiempo de muestreo TR Tiempo de retrazo Td Tiempo derivativo Ti Tiempo integral 3φ Trifásica U Universo de discurso kc, ku, KF Valor de ganancia Lx, Ly, Lz Valores lingüísticos (conjuntos difusos) Ω Valores reales admisibles para las variables físicas involucradas fabc Variables trifásicas fdq0 Variables bifásicas ω1, ω2, dα/dt Velocidad angular ωr Velocidad angular del rotor ω Velocidad angular del Marco de Referencia (MR) arbitrario ωm Velocidad mecánica del sistema (planta) ωref Velocidad de referencia ωs, Velocidad síncrona ωs(k) Velocidad síncrona muestreada en un tiempo ∆t Vsd, Vsq, Vs0 Voltajes aplicados a los devanados dq0 del estator Vrd, Vrq, Vr0 Voltajes aplicados a los devanados dq0 del rotor Vsabc, Vrabc Voltajes trifásico aplicado a los devanados del estator y rotor
respectivamente.
viii
ACRÓNIMOS y SIGLAS ANFIS Adaptive Neuro-Fuzzy Inference System MRA Marco de Referencia Arbitrario MKS Masa Kilogramo Metro MI Motor de Inducción NHTE Núcleo Híbrido de Transición de Estados P Proporcional PI Proporcional Integral PID Proporcional Integral Derivativo FCHV Vehículos Híbridos con Celdas de Combustible (por sus siglas en ingles)
ix
ÍNDICE DE FIGURAS Figura 2.1. Ejes magnéticos de una máquina de inducción de tres fases [28] Figura 2.2. Relación entre las variables trifásicas (abc) y bifásicas (dq0) [22] Figura 2.3. Representación esquemática del circuito equivalente del MI con rotor jaula de ardilla en el MRA [28] Figura 2.4. Flujo de energía activo en un motor de inducción trifásico [3, 45] Figura 2.5. Curva par – velocidad de un motor de inducción [45] Figura 2.6. Modelo esquemático del MI, sin carga Figura 2.7. Comparación esquemática de la velocidad del vehículo con el volante de inercias Figura 2.8. Representación esquemática del sistema mecánico Figura 2.9. Diagrama de cuerpo libre del sistema mecánico Figura 2.10. Modelo esquemático del sistema electromecánico Figura 2.11. Diagrama de bloques de la simulación de la planta Figura 3.1. Control en lazo cerrado por regulación de deslizamiento Figura 3.2a. Diagrama de bloques del control convencional y su conexión al sistema (planta) Figura 3.2b Respuesta del sistema a una entrada escalón unitario Figura 3.3. Control conceptual por inversión Figura 3.4a. Control en lazo cerrado Figura 3.4b. Control en lazo cerrado mas una planta conectada a la salida del controlador Figura 3.4c. Esquema del controlador por inversión Figura 3.5a. Esquema de la relación entrada-salida Figura 3.5b. Esquema de la propiedad de causalidad Figura 3.5c. Esquema de la definición de estado Figura 3.5d. Esquema de la transición de estado Figura 3.6. Identificación de una componente del estado de la planta con NHTE Figura 3.7a. Controlador de planta inversa con NHTE Figura 3.7b.- Control NHTE acoplado a la planta Figura 3.8a. Obtención del control difuso para el MI Figura 3.8b. Obtención del control difuso para el freno mecánico Figura 3.9. Diagrama de bloques del control Difuso y su conexión con el sistema electromecánico Figura 4.1a. Resultados de simulación de Vsd, Isd, Ird, Te y ωm y grafica del libro [28] Figura 4.1b. Resultados de simulación de Vsd, Isd, Ird, Te y ωm y modelo implementado en Simulink Figura 4.2a. Medición (corriente y voltaje) mediante el osciloscopio Figura 4.2b. Resultados de simulación del modelo del MI en Matlab/Simulink Figura 4.3a. Medición (corriente y voltaje) mediante el osciloscopio Figura 4.3b. Resultados de simulación del modelo del MI en Matlab/Simulink Figura 4.4. Esquema de la planta Figura 4.5. Control convencional y planta, definido en el capítulo 3 Figura 4.6. Variables a ser utilizadas para la obtención del control inteligente Figura 4.7. Control inteligente y planta, definido en el capítulo 3 Figura 4.8a. Graficación de ωref, ωs, Amp y TL, aplicando control convencional (con) e inteligente (int) Figura 4.8b. Graficación de ωref, Vsd, Isd, Tm, aplicando control convencional (con) e inteligente (int) Figura 4.8c. Graficación de ωref, ωm, dωm, Pe, Ps, aplicando control convencional (con) e inteligente (int) Figura 4.8d. Graficación de ωref, Tjr, Tjv y Tjd, aplicando control convencional (con) e inteligente (int) Figura 4.8e. Graficación de ωref, Tbr, Tbv y Tbd, aplicando control convencional (con) e inteligente (int) Figura 4.8f. Graficación de ωref, Prr, Pre y Pmag, aplicando control convencional (con) e inteligente (int) Figura 4.9a. Energías en Ee, Ere, Emag, Err, y Es, aplicando control convencional (con) e inteligente (int) Figura 4.9b. Energía Ereg, aplicando control convencional (con) e inteligente (int) Figura 4.10a. Graficación de ωref, ωs, Amp, TL y perturbación, aplicando control convencional (con) e inteligente (int) Figura 4.10b. Graficación de ωref, Vsd, Isd y Tm, aplicando control convencional (con) e inteligente (int) Figura 4.10c. Graficación de ωref, ωm, dωm, Pe y Ps, aplicando control convencional(con) e inteligente (int) Figura 4.11a. Graficación de ωref, ωs, Amp y TL, aplicando control convencional (con) e inteligente (int) Figura 4.11b. Graficación de ωref, Vsd, Isd y Tm, aplicando control convencional (con) e inteligente (int)

x
Figura 4.11c. Graficación de ωref, ωm, dωm, Pe y Ps, aplicando control convencional (con) e inteligente (int) Figura A1.1. Ejes magnéticos de una máquina de inducción de tres fases Figura A2.1a. Representación simbólica del momento de inercias Figura A2.1b. Representación simbólica del resorte torsional Figura A2.1c. Representación simbólica del amortiguador rotatorio Figura A2.2a. Representación esquemática del sistema mecánico Figura A2.2b. Modelo esquemático del sistema electromecánico Figura A2.3. Geometría de área de contacto de un segmento de zapata anular de un freno de yugo Figura A3.1a. Respuesta de entrada de paso de unidad Figura A3.1b. Límite de estabilidad Figura A3.1c. Respuesta a un escalón unitario Figura A4.1. Obtención del conjunto difuso resultante Figura A4.2a. Control difuso Figura A4.2b. Detalle del controlador difuso Figura A4.3. Sistema de inferencia difuso Figura A4.4. Variables lingüísticas Figura A4.5. Sistema difuso ó control difuso Figura A4.6. Red ANFIS de dos entradas Figura A6.1. Obtención del control difuso del MI para ωs Figura A6.2. Obtención del control difuso del MI para Amp Figura A6.3. Obtención del control difuso del freno mecánico Figura A8.1. Velocidad de referencia (ωref) y velocidad mecánica (ωm) de la planta Figura A8.1a. Energía para la velocidad de referencia (ωref) y pendiente de -160/5 Figura A8.1b. Energía para la velocidad de referencia (ωref) y pendiente de -160/10 Figura A8.1c. Energía para la velocidad de referencia (ωref) y pendiente de -160/15 Figura A8.1d. Energía para la velocidad de referencia (ωref) y pendiente de -160/20 Figura A8.1e. Energía para ωref con pendientes de -160/5, -160/10, -160/15 y -160/20

xi
LISTA DE TABLAS Tabla 2.1. Marco de referencia Tabla 2.2. Fórmulas de potencias y pérdidas en un motor de inducción. Tabla 2.3. Parámetros de simulación Tabla 3.1a. Regla de sintonización Tabla 3.1b. Parámetros de ganancia del control convencional Tabla 4.1a. Parámetros del MI [28] Tabla 4.1b. Parámetros del modelo electromecánico Tabla 4.4. Parámetros de ganancia del control Tabla 4.5a. Variables del control y planta Tabla A3.1. Regla de sintonización Tabla A3.2. Regla de sintonización Tabla A3.3. Algunos Controles Clásicos Tabla A3.4. Control Tabla A7.1. Variables de velocidad y control Tabla A7.2. Variables de par Tabla A7.3. Variables de potencia Tabla A8.1. Tabla de energía

1
Capítulo 1
ANTECEDENTES
Los vehículos eléctricos ya son familiares al público pero su precio, corta autonomía y bajas prestaciones han sido limitantes para un uso masivo. Los vehículos convencionales a base de motores de combustión interna se han utilizado durante más de un siglo, pero la creciente demanda de vehículos con un menor consumo y menor emisión de contaminantes, así como la creciente escasez de combustible fósil, preparan el terreno a un nuevo enfoque de diseño de autos a futuro. La combinación inteligente de estas dos tecnologías en un sistema híbrido puede conseguir ahorros de combustible notables y una considerable disminución en la emisión de gases. Aunado a esto, una reducción de ruido ambiental, una mejor autonomía y prestaciones similares a los de un vehículo convencional.
Una característica importante en los vehículos eléctricos e híbridos es que pueden recuperar energía en el momento de frenar, con ayuda de su motor eléctrico. En tanto los vehículos convencionales, la energía es disipada en la fricción en forma de calor. Por lo anterior, una alternativa recomendable seria el frenado regenerativo, mediante el cual la energía cinética de un vehículo puede ser convertida en energía eléctrica durante la desaceleración, por tanto aumentar la autonomía, reducir el desgaste en las partes mecánicas del vehículo y prolongar el tiempo de funcionamiento de la carga de la batería [60, 62]. Algunos de las diferentes formas de frenado regenerativo que se pueden mencionar son los siguientes [60, 62, 89, 91]:
• Cuando se suelta el pedal del acelerador [62], el frenado regenerativo permite reducir la velocidad del vehículo, al mismo tiempo que acumular la energía eléctrica regenerada.
• Durante una pendiente descendente, el frenado regenerativo permite una
recuperación de energía al tiempo que se conserva una misma velocidad.
• Durante el frenado [60, 62, 66, 91]: el freno regenerativo funciona cuando es presionado el pedal del freno durante la marcha.
Esta tesis está enfocada a la regeneración de la energía, utilizando un motor de
inducción (MI) de corriente alterna de rotor tipo jaula de ardilla y un volante de inercia para almacenar energía cinética. El MI es utilizado como generador durante el transitorio (desaceleración) mediante el concepto de frenado regenerativo [56]. Se implementan los modelos del sistema eléctrico y mecánico, así como el control en Matlab/Simulink®.

2
1.1. PLANTEAMIENTO DEL PROBLEMA El problema es probar estrategias para cumplir dos objetivos de control que a veces entran en conflicto: el seguir un itinerario de conducción y garantizar el ahorro de energía. Se emplea un motor de inducción (MI) de corriente alterna de rotor tipo jaula de ardilla, un volante de inercia para almacenar energía cinética y una combinación de frenado disipativo y frenado regenerativo. Se utiliza un control inteligente con base en el método Núcleo Hibrido de Transición de Estados (NHTE), y se plantea un control de frenado dual regenerativo/disipativo como solución. Todo el análisis se hace mediante Matlab/Simulink®. 1.2. JUSTIFICACIÓN
La energía es un tema prioritario a nivel mundial y la principal fuente es el petróleo, pero este es finito y a la vez los patrones de consumo del hombre están modificando en forma peligrosa el medio ambiente y agotando sus reservas; esto ha llevado a realizar trabajos de investigación para dar solución a este problema. Esta tesis tiene el propósito de avanzar en el uso y ahorro de energía eléctrica en sistemas de propulsión aprovechando el frenado regenerativo.
Este trabajo contribuye a dos áreas de investigación del Centro: el ahorro de energía y el control inteligente. 1.3. OBJETIVO
Simular el frenado dual regenerativo/disipativo, controlado por medio del NHTE, mediante Matlab/Simulink®. 1.3.1. Objetivos específicos.
• Modelado matemático aproximado del motor/generador • Modelado convencional con Matlab/Simulink®. del frenado regenerativo. • Modelado convencional con Matlab/Simulink®. del frenado disipativo • Simula el frenado dual con los modelos anteriores para generar datos. • Usan los datos para diseñar un control difuso con NHTE en Matlab/Simulink®. • Evaluar la energía recuperable generada.

3
1.4. ALCANCES
En este trabajo se aborda el análisis y modelado de un sistema de propulsión de un vehículo eléctrico y la conversión de energía, tomando como plataforma un sistema de propulsión eléctrica provisto de frenado regenerativo [56]. Se desarrolla un control inteligente difuso por medio del método NHTE, con la característica de aumentar el uso de frenado regenerativo y disminuir el uso del frenado disipativo. El sistema y los controles convencional e inteligente, fueron implementados en el programa de Matlab/Simulink®. Las metas propuestas fueron:
• El modelo y análisis matemático del motor de inducción de rotor jaula de ardilla se basa en el marco de referencia fijo al estator.
• El análisis dinámico considera rígido a los elementos que integran al sistema
mecánico: volante de inercias, disco de freno, chumaceras y flecha. Dicho análisis se fundamenta en las leyes de Newton.
• La simulación del sistema usando un control convencional, el cual tiene
involucrado dos controles: el primero es el control Proporcional Integrativo PI, y el segundo es el control Propocional P de freno mecánico el cual se accionará cuando cumpla unos condicionales.
• Un control inteligente obtenido a partir de los datos de entrada y salida del sistema
bajo control convencional, los cuales son utilizados para obtener las reglas difusas por medio de la herramienta ANFIS® de Matlab/Simulink®.
• La evaluación del seguimiento de la velocidad de referencia (ωref) del sistema
(planta) y el desempeño de los controles convencional e inteligente. • La evaluación de la energía recuperada del sistema bajo los controles convencional
e inteligente, durante las desaceleraciones. 1.5. LIMITACIONES
• El trabajo solo considera el modelado, el análisis, el control y la simulación del frenado regenerativo, en un sistema de propulsión eléctrica con regeneración de energía.
1.6. APORTACIONES
• Un modelado completo del sistema de propulsión y sistema mecánico. • Un control NHTE para la propulsión eléctrica, frenado regenerativo y disipativo.

4
1.7. ESTADO DEL ARTE FRENADO REGENERATIVO
En la actualidad existe la aplicación del frenado regenerativo en vehículos eléctricos e híbridos. Los informes relacionados al tema solo dan una idea general de su principio de funcionamiento. De igual forma, los artículos relacionados con el tema nos dan una base teórica para la comprensión del frenado regenerativo. En el artículo “Regenerative braking system for a hybrid electric vehicle”, de S. R. Cikanek y K. E. Bailey [62], se analiza el sistema de frenado regenerador (RBS) para un vehículo eléctrico híbrido paralelo (PHEV), que realiza la recuperación de la energía del vehículo. Se hace una descripción del algoritmo del frenado regenerativo y de resultados de simulación de un modelo dinámico del PHEV que usa frenado regenerativo. En el artículo “Modeling and simulation for hybrid electric vehicles. II. Simulation”, de Xiaoling He y Hodgson, J.W [91], se utiliza el modelo de un vehículo eléctrico híbrido (HEV) basado en el modelo desarrollado para un HEV paralelo construido en la Universidad de Tennessee, Knoxville (UT-HEV). Los resultados de la simulación para el UT-HEV predicen el funcionamiento del vehículo y proporcionan la mejora del control del vehículo. El modelo de la simulación proporciona la capacidad para la recuperación de energía por medio del frenado regenerativo, en función de la velocidad y la aceleración. En el artículo “Regenerative Braking for an Electric Vehicle Using Ultracapacitors and a Buck-Boost Converter”, de Juan W. Dixon, Micah Ortúzar y Eduardo Wiechmann [66], se representa un sistema de control para un vehículo eléctrico con baterías y ultracapacitores. El propósito de este dispositivo es permitir aceleraciones y desaceleraciones del vehículo eléctrico con pérdida mínima de energía, y el uso mínimo del banco de baterías. En los momentos de desaceleración el freno regenerativo convierte la energía cinética en energía eléctrica la cual es almacenada en el ultracapacitor. Los trabajos que se han realizado en el cenidet han permitido abordar el control de motores de inducción mediante inversores que involucran técnicas de modulación de ancho de pulso (PWM) de electrónica de potencia.
En la tesis de Manuel de Jesús Nandayapa Alfaro y Agustín Alejandro Hernández García, con el tema "Banco de pruebas para sistemas de propulsión eléctrica con regeneración de energía" [56] se usó un motor de inducción (MI) de corriente alterna tipo jaula de ardilla con accionamiento PWM y un volante de inercia para almacenar energía cinética. El MI es utilizado como generador durante el transitorio (desaceleración) mediante el concepto de frenado regenerativo. ESQUEMAS DE CONTROL
Otro aspecto igualmente importante de este trabajo, desde el punto de vista de investigación, es la metodología de control que se usará para el diseño del controlador.

5
A continuación se mencionan unos trabajos desarrollados en el cenidet, en la formalización del modelado y control de MI.
• La tesis de Gerardo Vicente Guerrero Ramírez, con el tema “Modelado y Simulación de un Sistemas Impulsor de Motores de Inducción Trifásicos” [53] presentan modelos basados en la teoría del marco de referencia, simulando diferentes condiciones de operación de cada uno de los convertidores electrónicos que componen el sistema impulsor propuesto y el motor de inducción utilizado. Del conocimiento de sus características y de su adecuada interpretación depende la toma de decisiones correctas para la selección del equipo de alimentación, protección, control y carga del motor de inducción tipo jaula de ardilla.
• La tesis de Miguel Ángel Méndez Bolio, con el tema “Controladores de Motores de
Inducción: Un Análisis Comparativo” [55] presenta el estudio de los motores de inducción, de sus diferentes métodos de control, así como la elaboración de programas computacionales (con la ayuda del programa de Matlab/Simulink®) para la simulación digital de la operación de los diferentes esquemas de control analizados.
Los sistemas inteligentes permiten emular la capacidad de la mente humana para
razonar y aprender bajo las condiciones de incertidumbre e imprecisión del mundo real. Las dos técnicas más útiles para el diseño de controles inteligentes son las redes neuronales artificiales y la lógica difusa. Los controles de lógica difusa, a la vez que permiten la sintonización numérica y automática de controladores difusos a partir de datos de entrada y salida del sistema a controlar, también permiten traducir a lenguaje matemático el conocimiento de tipo lingüístico de un experto humano.
La metodología a utilizar es el Núcleo Híbrido de Transición de Estados (NHTE), la cual es un enfoque sistemático para la representación de sistemas dinámicos mediante técnicas de inteligencia artificial desarrollada en el cenidet, a partir de 1996, en la formalización del modelado y control de sistemas dinámicos [47, 54]. El NHTE se basa en dos conceptos:
• La función de transición de estados de los sistemas dinámicos determinísticos, invariantes, de parámetros concentrados [1, 23, 29, 40, 77, 92].
• Las redes neuronales y la lógica difusa como aproximadores universales de funciones multivariables, [42, 44, 69, 71, 77, 79, 82].
Los trabajos que han aplicado la metodología NHTE:
• La tesis de Rodolfo Castillo Romero, con el tema “Sintonización de controladores difusos basada en el método de gradiente descendente” [47] permitió la implementación de una metodología capaz de sintonizar tanto los conjuntos como las reglas difusas. Se logra una herramienta para elaborar simuladores difusos y controladores difusos de un sistema dinámico dado. Los controladores difusos permiten integrar conocimiento previo del usuario a los datos de entrenamiento del
6
sistema a identificar o controlar. El utilizar datos del usuario al inicio de la sintonización, aceleran la convergencia de la aproximación puede ayudar a no caer en mínimos locales.
• La tesis de José Juan Hernández Mora, con el tema “Implementación de una red neuronal para el control de un brazo robot articulado” [54] muestra la aplicación del NHTE basado en redes neuronales como una alternativa para el control o la identificación de sistemas no lineales. Un aspecto interesante es que no se necesita conocer de manera exacta el modelo matemático ya que, con sólo conocer las entradas y salidas del sistema, se puede obtener un modelo de planta inversa. Se concluyó que su eficiencia depende mucho del tipo de modelo de red neuronal que se utilice, aunque la calidad del control es prácticamente independiente del tipo de red.
Con la ayuda de la lógica difusa se pretende obtener la relación entrada – salida
deseada, a partir de los datos de entrenamiento. Para obtener la relación se hace uso de la arquitectura ANFIS® (Adaptive Neuro-based Fuzzy Inference System) con el cual se consigue construir un conjunto de reglas si–entonces con funciones de pertenencia apropiadas para la relación entrada – salida deseada [69]. FRENADO DISIPATIVO La capacidad de frenado de un vehículo depende de diversos factores: velocidad, peso, la capacidad que tenga el neumático para adherirse a la carretera y las condiciones de la carretera (textura, temperatura, presencia de agua, grava. etc.)[15, 25, 27].
En un sistema de frenado, al accionar el pedal de freno fuertemente se obtiene una reducción considerable de la rotación de las ruedas, con las siguientes consecuencias:
• Dificultad para mantener el control sobre la dirección del vehículo, ya que se tienen las ruedas delanteras bloqueadas.
• Pérdida de estabilidad de vehículo. • Desgaste prematuro e irregular de los neumáticos. • En el caso especial de un camión-tractor con remolque, se genera el efecto de
navaja suiza al perderse la alineación entre el tractor y el remolque.
La solución técnica para impedir el bloqueo de las ruedas en frenadas violentas es el uso del "Sistema Antibloqueo de Frenos", ABS [59], el cual permite mantener el control sobre la dirección del automóvil.
El ABS actúa sobre la fuerza de frenado que se ejerce en los tambores de freno. Al momento de detectar una diferencia extraordinaria de velocidad en alguna de las ruedas, reduce la fuerza aplicada y minimiza su deslizamiento de forma tal que la rueda permanezca lo más adherida posible al pavimento. El resultado de esta operación es que el vehículo se detenga en una menor distancia. Se requieren de cuatro componentes para el funcionamiento de un sistema ABS:

7
• Sensor de velocidad: Cada rueda del coche o bien el diferencial cuenta con un sensor de velocidad que determina cuando la rueda está a punto de bloquearse.
• Válvulas: Existe una válvula en cada línea de líquido de frenos, estas permiten presurizar o bien liberar presión en cada una de las ruedas según los requerimientos.
• Bomba: Cuando se libera presión en los frenos mediante las válvulas, la bomba tiene la función de recuperar la presión.
• Controlador: El controlador es una computadora que recibe señales de los sensores de velocidad de las ruedas y con esta información opera las válvulas.
1.8. PLAN DE EXPOSICIÓN El trabajo de tesis incluye una descripción teórica del motor de inducción, sistema mecánico y el control convencional e inteligente. Se obtiene una serie de simulaciones del modelo. Finalmente se establecen las conclusiones. Con este fin se han estructurado los capítulos:
En el capítulo 2 se derivan los modelos eléctricos y mecánicos del sistema. Se presenta una introducción teórica del principio del funcionamiento del MI de rotor de jaula de ardilla, mostrando las ecuaciones de voltaje, par, aceleración y flujo de potencia, en el marco de referencia fijo al estator.
Para el modelo del sistema mecánico, se analizan los elementos involucrados, basándose las ecuaciones matemáticas en las Leyes de Newton, considerándose los elementos involucrados en el modelo como rígidos.
El capítulo 3 presenta el control para el MI y el freno mecánico el cual se accionará cuando cumpla unos permisivos. Una introducción al control inteligente y la implementación de ambos controles en la simulación.
El capítulo 4 presenta los resultados de simulación de los controladores convencional e inteligente controlando un sistema (planta) y se analizan los resultados obtenidos. El capítulo 5 presenta las conclusiones y aportaciones del trabajo.
Por último la bibliografía utilizada y un conjunto de anexos que comprenden los conceptos y programas en Matlab/Simulink® elaborados durante el trabajo.

9
Capítulo 2
MODELADO DEL SISTEMA ELECTROMECÁNICO Se presentan los conceptos generales del motor de inducción (MI), así como el análisis matemático del MI en el marco de referencia fijo al estator y la transferencia de energía de su forma eléctrica a su forma mecánica. Por lo anterior se consigue identificar los modos de operación del MI. Se hace una comparación del sistema mecánico con una masa vehicular, se hace una equivalencia analítica considerando la inercia total del modelo y la velocidad a la que se trabaja, obteniéndose la masa vehicular que representa el sistema mecánico. De igual forma se presenta el modelo del sistema mecánico el cual se basa en las leyes de Newton. Las ecuaciones que representan al sistema eléctrico (MI) y el sistema mecánico, se integran para obtener el sistema electromecánico. Dicho modelo es implementado en Matlab/ Simulink®. 2.1. ECUACIÓN DINÁMICA DEL SISTEMA ELÉCTRICO 2.1.1. Principio de operación El MI es equivalente al transformador eléctrico, la diferencia es que el circuito magnético se encuentra separado en dos partes por un entrehierro. La parte fija aloja al devanado primario más conocido como “estator”. La parte giratoria aloja al devanado secundario comúnmente llamado “rotor”. La corriente alterna establecida en el devanado primario producto del voltaje aplicado al estator, induce una corriente en el rotor. El movimiento relativo entre el estator y el rotor se produce por la fuerza electromagnética correspondiente a la potencia que es transferida a través del entrehierro por inducción [10, 14, 21, 34, 35]. La velocidad de rotación del campo es conocida como velocidad síncrona (ωs), y se define por:
14s
fpπω = rad/seg (2.1)
donde ωs es la velocidad síncrona (rad/seg) f1 es la frecuencia de alimentación en los devanados (Hz.) p es el número de polos en los devanados.

10
2.1.2. Análisis del motor de inducción 2.1.2.1. Ecuaciones del MI trifásico. Las ecuaciones de estado del MI trifásico se deducen a partir de la configuración expuesta en la figura 2.1. [28], tomándose las siguientes consideraciones:
• La fuente de alimentación trifásica está balanceada. • Las inductancias en los devanados del rotor ra, rb, rc son: Lra=Lrb=Lrc, y en las
del estator sa, sb, sc son: Lsa=Lsb=Lsc. • Cada devanado del estator y rotor tienen un número de vueltas Ns y Nr
respectivamente. • Los devanados del estator sb y sc están desplazados simétricamente del
devanado sa por ± 120º, igualmente para los devanados del rotor. • θr es la posición angular del rotor con respecto al estator.
Figura 2.1. Ejes magnéticos de una máquina de inducción de tres fases [28]
Las ecuaciones de voltaje que describen los circuitos del estator y del rotor se escriben convenientemente en forma de matriz como [22, 28, 31,41, 49, 55]:
dsabc sabc sabc sabcdtV r i λ= + (2.2)
drabc rabc rabc rabcdtV r i λ= + (2.3)
donde: isabc Corriente trifásica aplicada a los devanados estator. irabc Corriente trifásica aplicada a los devanados rotor. λsabc Flujo magnético trifásico en el estator. λrabc Flujo magnético trifásico en el rotor. rsabc Resistencia de los devanados del estator. rrabc Resistencia de los devanados del rotor. Vsabc Voltaje trifásico aplicado a los devanados estator. Vrabc Voltaje trifásico aplicado a los devanados rotor.

11
Donde Vsabc, Vrabc, isabc, irabc, λsabc y λrabc son vectores de 3x1, y la matriz de resistencia de (3x3) del estator y rotor, con componentes en la diagonal y están dadas por:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
sc
sb
sa
sabc
VVV
V ; 0 0
0 00 0
sa
sabc sb
sc
rr r
r
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
sc
sb
sa
sabc
iii
i ; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
sc
sb
sa
sabc
λλλ
λ
(2.4)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
rc
rb
ra
rabc
VVV
V ; 0 0
0 00 0
ra
rabc rb
rc
rr r
r
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
rc
rb
ra
rabc
iii
i ; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
rc
rb
ra
rabc
λλλ
λ
Los acoplamientos del flujo magnético, los cuales están relacionados con las corrientes que fluyen por los devanados de la máquina eléctrica, están definidos por las ecuaciones siguientes [28]:
( ) ( )rsabcssabcsabc λλλ += (2.5)
( ) ( )rrabcsrabcrabc λλλ += (2.6) donde
( ) sabc
scsbcsac
sbcsbsab
sacsabsa
ssabc iLLLLLLLLL
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=λ (2.7)
( ) rabc
rcscrbscrasc
rcsbrbsbrasb
rcsarbsarasa
rsabc iLLLLLLLLL
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
,,,
,,,
,,,
λ (2.8)
( ) sabc
scrcsbrcsarc
scrbsbrbsarb
scrasbrasara
srabc iLLLLLLLLL
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
,,,
,,,
,,,
λ (2.9)
( ) rabc
rcrbcrac
rbcrbrab
racrabra
rrabc iLLLLLLLLL
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=λ (2.10)
donde Lsa, Lsb, Lsc Inductancias en los devanados del estator s(a, b y c). Lra, Lrb, Lrc Inductancias en los devanados del rotor r(a, b y c). Lsab, Lsbc, Lsca Inductancia mutua entre los devanados s(a y b, b y c, c y a) respectivamente. Lsa,ra, Lsb,rb, Lsc,rc Inductancias mutuas entre los devanados (ra y sa), (rb y sb) y (rc y sc), el devanado del rotor ra, rb y rc con un desplazamiento θr a partir del devanado del estator sa, sb y sc respectivamente.

12
Lsa,rb, Lsb,rc, Lsc,ra Inductancias mutuas entre los devanados (rb y sa), (rc y sb) y (ra y sc), el devanado del rotor rb, rc y ra con un desplazamiento θr + 2π/3 a partir del devanado del estator sa, sb y sc respectivamente. Lsa,rc, Lsb,ra, Lsc,rb Inductancias mutuas entre los devanados (rc y sa), (ra y sb) y (rb y sc) el devanado del rotor rc, ra y rb con un desplazamiento θr – 2π/3 a partir del devanado del estator sa, sb y sc respectivamente. Lra,sa, Lrb,sb, Lrc,sc Inductancias mutuas entre los devanados (sa y ra), (sb y rb) y (sc y rc), el devanado del estator sa, sb y sc con un desplazamiento – θr a partir del devanado del rotor ra, rb y rc respectivamente. Lra,sb, Lrb,sc, Lrc,sa Inductancias mutuas entre los devanados (sb y ra), (sc y rb) y (sa y rc), el devanado del estator sb, sc y sa con un desplazamiento – θr + 2π/3 a partir del devanado del rotor ra, rb y rc respectivamente. Lra,sc, Lrb,sa, Lrc,sb Inductancias mutuas entre los devanados (sc y ra), (sa y rb) y (sb y rc), el devanado del estator sc, sa y sb con un desplazamiento – θr – 2π/3 a partir del devanado del rotor ra, rb y rc respectivamente. Se observa como resultado de la reciprocidad, la matriz de inductancias ecuación (2.9) del acoplamiento del flujo magnético, es simplemente la transpuesta de la matriz de inductancia ecuación (2.8). La matriz de inductancias, ecuaciones (2.7), (2.8), (2.9) y (2.10), es definida en el anexo1, sección A1.1. 2.1.2.2. Introducción a la teoría del marco de referencia Es posible obtener un modelo equivalente de la máquina trifásica, cuyas ecuaciones son mucho más sencillas de resolver, en base en las ecuaciones de la máquina original. Para esto se adopta la transformación marco de referencia arbitrario [22, 28, 31, 49, 55]. A partir de un marco de referencia arbitrario (MRA) se consigue pasar a los marcos de referencia fijo al estator, fijo al rotor o al giratorio síncrono [22, 31, 41, 49, 55]. Los marcos de referencia se seleccionan sobre la base de la conveniencia o compatibilidad con la representación de los elementos del circuito, y en consecuencia facilita el diseño de una ley de control para la programación y simulación del sistema. Un cambio de variable que logra la transformación de las variables trifásicas de los elementos de un circuito estacionario al MRA de dos fases se expresa como [22, 49, 55]:
( )0 0dq dq d abcf T fθ= (2.11)
( ) ( )3 30 0 0: ,dq d dq dq d abcT f T fθ θΩ ⊂ℜ →ℜ →
donde Ω Conjunto de valores reales admisibles para las variables físicas involucradas, f Sistema trifásico de variables eléctricas desfasadas 120o entre sí (voltaje, corriente, par, etc.), abc Sistema de variables originales, dqo Sistema de variables resultantes, θd Ángulo entre el eje sa y el eje sd girando a velocidad ω, Tdq0(θd) Matriz de transformación.

13
La matriz de transformación se define como [22, 49, 55]:
( )0
2 23 3
2 2 2cos cos cos3 3 3
1 1 12 2 2
d d d
dq d d d d
sen sen sen
T
π πθ θ θ
π πθ θ θ θ
⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞− +⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎛ ⎞ ⎛ ⎞= − +⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(2.12)
donde el término 2/3 es un factor constante que iguala las amplitudes de las variables trifásicas fabc y las variables bifásicas fdq0. La figura 2.2 muestra las nuevas variables fd y fq desfasadas 90o y girando a velocidades arbitrarias (ω). Las variables f0 no está asociada con el marco de referencia arbitrario, sólo está asociada aritméticamente con las variables originales abc, independientemente de θd.
Figura 2.2. Relación entre las variables trifásicas (abc) y bifásicas (dq0) [22].
La inversa de la matriz de transformación es utilizada para recuperar las variables trifásicas (voltaje, corriente, par, etc.) del sistema (MI). El cambio de variables bifásicas a trifásicas se expresa como:
( ) 1
0 0abc dq d dqf T fθ−
⎡ ⎤= ⎣ ⎦ (2.13) La siguiente ecuación muestra la inversa de la matriz de transformación [22, 49, 55]:
( ) 1
cos 12 2cos 13 3
2 2cos 13 3
d d
dqo d d d
d d
sen
T sen
sen
θ θπ πθ θ θ
π πθ θ
−
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎛ ⎞ ⎛ ⎞⎡ ⎤ = − −⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎣ ⎦ ⎝ ⎠ ⎝ ⎠⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎛ ⎞ ⎛ ⎞+ +⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠⎣ ⎦
(2.14)
La tabla 2.1, presenta los valores que toma la velocidad angular (ω), en un MRA, al cambiar a otro MR [22, 49, 55].

14
Tabla 2.1. Marco de referencia Velocidad
del MR Interpretación Variables Transformación
ω (arbitraria)
Variables del estator y rotor referidos al marco de referencia arbitrario (MRA)
fdq0 ó fd, fq, f0
Tdq0(θd)
ω = 0 Variables del estator y rotor referidos al marco de referencia fijo al estator
fdq0s ó
fds, fq
s, f0 θd = 0 Tdq0(0)
ω = ωr Variables del estator y rotor referidos al marco de referencia fijo al rotor
fdq0r ó
fdr, fq
r, f0 θd = θr Tdq0(θr)
ω = ωe Variables del estator y rotor referidos al marco de referencia giratorio síncrono
fdq0e ó
fde, fq
e, f0 θd = θe Tdq0(θe)
2.1.2.3. Representación del MI trifásico en el MRA La representación matemática del MI referenciado al MRA ‘dq0’, es obtenida con la transformación de tres a dos fases ecuación (2.11), a las ecuaciones del MI trifásico ecuaciones (2.2) y (2.3). Además se consideran las variables mostradas en la tabla 2.1, obteniéndose [22, 28, 31, 49, 55]:
0 0 0sdq s sdq sdq sdqdV R idt
ωλ λ= + + (2.15)
( )0 0 0rdq r rdq r rdq rdqdV R idt
ω ω λ λ= + − + (2.16)
Las ecuaciones de voltaje son a menudo escritas en forma desarrollada [anexo 1, sección A1.2.], así como la representación esquemática del circuito equivalente del MI con rotor jaula de ardilla en el MRA como se muestra en la figura 2.3:
Figura 2.3. Representación esquemática del circuito equivalente
del MI con rotor jaula de ardilla en el MRA [28].

15
donde Rs, Rr : resistencias de estator y rotor respectivamente, Lls, Llr : inductancias de dispersión de los devanados de estator y rotor respectivamente. Lm : inductancia mutua. isd, isq , is0 : corrientes en el marco dq0 del estator, ird, irq, ir0 : corrientes en el marco dq0 del rotor, Vsd, Vsq, Vs0 : voltajes aplicados a los devanados dq0 del estator, Vrd, Vrq, Vr0 : voltajes aplicados a los devanados dq0 del rotor, ω : velocidad angular del Marco de Referencia (MR) arbitrario, p : número de pares de polos, ωr : velocidad angular del rotor. El modelo del MI con rotor jaula de ardilla referido al estator, como las matrices de transformación ecuaciones (2.12) y (2.14), se considera ω=0 y θd=0 (Tabla 2.1), obteniéndose las siguientes ecuaciones [anexo 1, sección A1.2.]: Matrices de transformación de abc – dq0.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
cba
qd
111112330
31
0 (2.17)
Matriz de transformación de dq0 – abc.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
0213213220
21 q
d
cba
(2.18)
Ecuaciones del MI con rotor jaula de ardilla fijo al estator.
1sd rdsd s sd m
s
di diV R i Ldt L dt
⎡ ⎤= − −⎢ ⎥⎣ ⎦ (2.19)
1sq rqsq s sq m
s
di diV R i L
dt L dt⎡ ⎤
= − −⎢ ⎥⎣ ⎦
(2.20)
[ ]00 0
1ss s s
sl
di V R idt L
= − (2.21)
1rd sdr rd r r rq m r sq m
r
di diR i L i L i Ldt L dt
ω ω⎡ ⎤= − − − −⎢ ⎥⎣ ⎦ (2.22)
1rq sqr rq r r rd m r sd m
r
di diR i L i L i L
dt L dtω ω
⎡ ⎤= − + + −⎢ ⎥
⎣ ⎦ (2.23)
[ ]00
1rs r
rl
di R idt L
= − (2.24)
Donde s sl mL L L= + ; r rl mL L L= + Ls, Lr : Inductancia propia de los devanados de estator y rotor respectivamente. La excitación para el modelo del MI se obtiene a partir de la excitación trifásica de las variables: Vsd, Vsq y Vso [anexo1, sección A1.3.].

16
2.1.2.4. Par electromagnético Hasta este punto se ha analizado el MI como un circuito magnético acoplado. Para obtener el par electromagnético, se considera la potencia de entrada de la máquina trifásica considerando la suma de los seis devanados del estator y del rotor, como se muestra en la siguiente ecuación [31]:
e sa sa sb sb sc sc ra ra rb rb rc rcP V i V i V i V i V i V i= + + + + + (2.25) y en los términos del marco de referencia dq0, la potencia de entrada instantánea es determinada por [31]:
( )30 0 0 02 2 2e sd sd sq sq s s rd sd rq rq r rP V i V i V i V i V i V i= + + + + + (2.26)
Donde las unidades de potencia en el sistema MKS son watts. Se sustituyen las ecuaciones de voltaje, (ecuación (A1.29a)), en la ecuación (2.26), se realizan operaciones matemáticas [9, 12], obteniéndose la siguiente ecuación:
( ) ( )( ) ( ) ( )( ) ( ) ( )
( )
2 2 2 2 2 20 0
0 0
0 0
2 2
232 2
s sd sq s r rd rq r
d d d d ds sd m rd sd s sq m rq sq sl s sdt dt dt dt dt
e d d d d dm sd r rd rd m sq r rq rq rl r rdt dt dt dt dt
r m sq rd sd rq
R i i i R i i i
L i L i i L i L i i L i iP
L i L i i L i L i i L i i
L i i i iω
⎡ ⎤+ + + + + +⎢ ⎥⎢ ⎥+ + + + + +⎢ ⎥=⎢ ⎥+ + + + + +⎢ ⎥⎢ ⎥+ −⎣ ⎦
(2.27)
Las pérdidas de potencia disipada en forma de calor, en las resistencias del estator y del rotor de la máquina eléctrica son dadas por la ecuación (2.28) derivada de la ecuación (2.27) [31]:
( ) ( )2 2 2 2 2 20 0
3 2 22re rr s sd sq s r rd rq rP P R i i i R i i i⎡ ⎤+ = + + + + +⎣ ⎦ (2.28)
Las pérdidas de potencia magnética en el núcleo, se expresan por la ecuación (2.29) derivada de la ecuación (2.27) [31].
( ) ( ) ( )( ) ( ) ( )
0 0
0 0
232 2
d d d d ds sd m rd sd s sq m rq sq sl s sdt dt dt dt dt
mag d d d d dm sd r rd rd m sq r rq rq rl r rdt dt dt dt dt
L i L i i L i L i i L i iP
L i L i i L i L i i L i i
⎡ ⎤+ + + + +⎢ ⎥=⎢ ⎥+ + + + +⎣ ⎦
(2.29)
La potencia electromecánica expresa la conversión de la potencia eléctrica a potencia mecánica es dada por la ecuación (2.30) derivada de la ecuación (2.27) [31]:
( )32m r m sq rd sd rqP L i i i iω⎡ ⎤= −⎣ ⎦ (2.30)

17
Debido a la interacción de dos campos magnéticos entre el rotor y el estator, se origina un par electromagnético, el cual se aprovecha para impulsar una carga mecánica acoplada a la flecha del rotor. El par electromagnético es obtenido multiplicando la ecuación (2.30), por el número de polos entre dos veces la velocidad mecánica (ωr) del rotor:
( ) ( )3 32 2 2 2e r m sq rd sd rq m sq rd sd rq
r
p pT L i i i i L i i i iωω
⎡ ⎤= − = −⎣ ⎦ (2.31)
donde p es el número de polos. La ecuación de la parte mecánica del MI en términos del par electromagnético y la aceleración (dωr/dt) del rotor es determinada como [anexo1, sección A2.3.]:
( )01r
e rd T B Tdt Jω ω= − − (2.32)
donde B: coeficiente de fricción en la chumacera J: inercia del rotor T0: par de carga aplicado al MI ωr: velocidad angular del rotor 2.1.3. Transferencia de potencia El proceso de transformar energía de su forma eléctrica a su forma mecánica o recíprocamente. No se realiza de manera directa sino que requiere de una conversión de tipo magnético. El proceso es reversible excepto por la energía disipada en forma de calor [3, 8, 10, 14, 21, 22, 24, 43, 45]. Basándose en el principio de la conservación de la energía [34, 35], es posible definir la forma más conveniente para el acoplamiento electromagnético. En un motor eléctrico, los voltajes, las corrientes, y los diagramas de fase nos permiten entender el comportamiento detallado de un motor de inducción. Sin embargo, el análisis de la potencia activa da una idea más clara del comportamiento del proceso de transformación de energía eléctrica a mecánica. La figura 2.4, muestra este proceso de transformación de la potencia. Se muestran las pérdidas de potencia debida a la resistencia del devanado del estator (Pre) y las pérdidas de potencia magnética en el núcleo (Pmag) disipadas en forma de calor. La potencia que logra permanecer hasta este punto es transferida al rotor por inducción electromagnética a través del entrehierro. A esta potencia se le conoce como potencia en el entrehierro de la máquina. Después de que la potencia se transfiere al rotor, una porción se disipa en forma de calor, debido a las pérdidas de potencia debida a la resistencia en el rotor (Prr) y el resto esta finalmente disponible en forma de potencia mecánica (Pm). Substrayendo las pérdidas de potencia por fricción (Pf) y aire (Pa), se consigue la potencia mecánica disponible en el eje (Ps) para mover una carga [3, 8, 10, 45].

18
Figura 2.4. Flujo de energía activo en un motor de inducción trifásico [3, 45]
En la tabla 2.2., se presentan las ecuaciones para la aproximación de la potencia y pérdidas en un MI en los términos del marco de referencia fijo al estator dq0.
Tabla 2.2. Fórmulas de potencias y pérdidas en un motor de inducción. Potencia de entrada, ecuación (2.26).
( )0 0 0 03 2 22e sd sd sq sq s s rd sd rq rq r rP V i V i V i V i V i V i= + + + + +
Las pérdidas por la resistencia en los devanados del estator, ecuación (2.28).
( )2 2 20
3 22re s sd sq sP R i i i= + +
Las pérdidas de potencia magnética en el núcleo, ecuación (2.29). ( ) ( ) ( )( ) ( ) ( )
0 0
0 0
232 2
d d d d ds sd m rd sd s sq m rq sq sl s sdt dt dt dt dt
mag d d d d dm sd r rd rd m sq r rq rq rl r rdt dt dt dt dt
L i L i i L i L i i L i iP
L i L i i L i L i i L i i
⎡ ⎤+ + + + +⎢ ⎥=⎢ ⎥+ + + + +⎣ ⎦
Las pérdidas por la resistencia en los devanados del rotor, ecuación (2.28). ( )2 2 2
03 22rr r rd rq rP R i i i= + +
Potencia mecánica desarrollada, ecuación (2.30).
( )32m e re mag rr r m sq rd sd rqP P P P P L i i i iω⎡ ⎤= − − − = −⎣ ⎦
Potencia de salida. s m f aP P P P= − −
2.1.3.1. Característica par-velocidad del motor de inducción El motor presenta tres modos de operación: motor, generador, y freno. La figura 2.5, muestra la curva característica de par – velocidad [3, 8, 10, 45]. De aquí podemos identificar los modos de operación enunciados:
• Modo motor: el eje gira en la misma dirección que el campo magnético giratorio, la velocidad síncrona (ωs) es mayor a la velocidad mecánica (ωm) y la potencia de entrada (Pe) es positiva.
• Modo generador: el eje gira en la misma dirección que el campo magnético giratorio, pero la velocidad síncrona (ωs) es menor a la velocidad mecánica (ωm) y la potencia de entrada (Pe) es negativa.
• Modo freno: el eje gira en sentido contrario a la del campo giratorio y la potencia (Pe) es positiva.

19
Figura 2.5. Curva par – velocidad de un motor de inducción [45]
Resumen: se ha analizado al MI en los términos del marco de referencia estacionario dq0, sin tomar en cuenta la carga. En la siguiente sección se realizara un análisis de la carga la cual esta compuesta por el volante de inercia (J0), el disco de frenos (J1), el par de freno mecánico (TL), y la fricción en las chumaceras (B0) y (B1), como se muestra en la figura 2.6.
Figura 2.6. Modelo esquemático del MI, sin carga.
2.2. COMPARACIÓN DEL SISTEMA MECÁNICO CON LA MASA VEHICULAR Para saber la velocidad angular (ωv) del volante de inercia del modelo, se necesita que la velocidad tangencial (vv) del volante sea igual a la velocidad (vve) a la que se desplaza el vehículo eléctrico. La figura 2.7 muestra la relación esquemática del volante de inercia y el vehículo. Así como las fuerzas que son ejercidas en el vehículo.
Figura 2.7. Comparación esquemática de la velocidad del vehículo con el volante de inercias.

20
donde ax Aceleración lineal. h Altura del suelo al centro de gravedad del vehículo. c Distancia entre la rueda A y el centro de gravedad del vehículo. b Distancia entre la rueda B y el centro de gravedad del vehículo. L Distancia entre las ruedas. Fx Fuerza de tracción en las llantas. Wf Fuerza normal θ Pendiente de la trayectoria W Peso del vehículo rll Radio de la llanta. Rx Resistencia al rodamiento Da Resistencia aerodinámica vve Velocidad del vehículo. Considerando que un vehículo eléctrico alcanza una velocidad aproximada de vve= 100Km/hr= 27.77777m/seg se hace una adecuación al modelo, donde el radio del volante es rv = 0.18m., entonces la velocidad angular (ωv) del volante se define de la siguiente manera como [56]:
veve v v v
v
vv rr
ω ω= ∴ = (2.33)
27.7777 / . 154.32098 / . 1473.6569 .0.18
vev
v
v m seg rad seg rpmr m
ω = = = =
Para conocer la energía cinética (Ec) almacenada en la parte mecánica a una cierta velocidad angular (ωv) tenemos que:
212 T vEc J ω= (2.34)
Donde 0 1TJ J J J= + + representa la suma de las inercias del rotor del MI (J), el volante de inercia (J0) y el disco de frenos (J1), entonces sustituyendo valores de la tabla 2.3 en la ecuación 2.34.
( )( )221 0.12511713 * 154.32098 / 1491.15152
Ec Kg m rad seg Joules= =
Tabla 2.3. Parámetros de simulación Variables Valor de la variable Inercia del rotor J = 0.0018049 Kg*m2. Coeficiente de fricción viscosa B = 0.0001 N*m*rad*s. Inercia del volante J0 = 0.1232999 Kg*m2. Inercia del disco de freno J1 = (J0/1000) Kg*m2. Coeficiente de fricción viscosa B0 = 0.0003 N*m*rad*s. Coeficiente de fricción viscosa B1 = B0/100 N*m*rad*s.

21
Es importante mencionar que la inercia total (JT) emula la inercia de un vehículo eléctrico. Es decir, en la propulsión la inercia a vencer es la que posee JT, y en el proceso de regeneración, la energía que se busca recuperar es la energía cinética que se almacena en JT. Para saber la equivalencia de la inercia total (JT) del modelo a una masa vehicular (mve) en movimiento rectilíneo, se considera la energía cinética calculada de la ecuación (2.34) tenemos:
22
1 22 ve ve ve
ve
EcEc m v mv
= ⇔ = (2.35)
( )( )22
2 1491.15152 3.865027.7777
veve
JoulesEcm Kgv
= = =
Entonces el sistema mecánico de nuestro modelo representa una masa vehicular de 3.8650Kg., a una velocidad de 27.777m/seg. Ahora si la masa vehicular es de 1500Kg., a una velocidad de 100Km/hr., entonces nuestro modelo representaría 1/388.098 la masa vehicular. Si queremos representar las fuerzas externas que afectan al vehiculo eléctrico, en el modelo, se considera la posición de la fuerza respecto al eje de la llanta, como el par de carga (Tc) definido como:
cT Fr= (2.36) F = Fuerza de accionamiento, r = Coordenada de ubicación de la fuerza al eje de la llanta. La representación de las fuerzas externas en el modelo es a escala. 2.3. ECUACIÓN DINÁMICA DEL SISTEMA MECÁNICO 2.3.1. Leyes de Newton Isaac Newton expuso su trabajo relativo a la mecánica en su obra Philosophiae Naturalis Principia Mathematica (1687). Se expone la idea de la atracción de los cuerpos, esto es, la ley de la gravitación universal. Isaac Newton fue profesor de matemáticas de la universidad de Cambridge, y su trabajo abarcó variados aspectos de la física. Fue él quien introdujo el concepto de masa en el estudio de la mecánica a través de las leyes de Newton [4, 10, 15, 25, 27, 29, 34, 35, 37, 40], las cuales a continuación se citan: Primera ley de Newton El sistema de fuerzas sobre una partícula está en equilibrio cuando la fuerza resultante de dicho sistema es cero. En tal caso podemos expresar algebraicamente: ∑ = 0extF (2.37) Segunda ley de Newton Si el sistema de fuerzas aplicado sobre una partícula de masa m tiene una resultante diferente de cero, ésta sufrirá una aceleración de magnitud proporcional a dicha resultante e inversamente proporcional a la masa m. La expresión algebraica de esta ley es la siguiente: ∑ = maFext (2.38)

22
Tercera ley de Newton La fuerza ejercida por un cuerpo sobre otro tiene la misma magnitud pero dirección contraria a la fuerza ejercida por el segundo cuerpo sobre el primero.
BAAB FF −= (2.39) Para la obtención de un modelo mecánico, primero, se identifican los elementos que interactúan. Luego se identifican las fuerzas que actúan sobre cada uno de ellos. Se elige un sistema adecuado de coordenadas y se representan todas las fuerzas y aceleraciones. Una vez definido esto se aplica la segunda ley de Newton para cada uno de los elementos. Una vez determinadas las ecuaciones de movimiento y conocido el estado inicial (posición y velocidad de cada uno de los elementos) del sistema podemos encontrar su solución. 2.3.2. Modelo dinámico del sistema mecánico El sistema mecánico a analizar está constituido por un volante de inercia, disco de freno, chumaceras y flecha, como se muestra en las figuras 2.8. y 2.9. Las dos masas rotatorias con momentos de inercia J0 (Inercia del volante) y J1 (disco de frenos), acopladas por una flecha. El coeficiente de fricción en las chumaceras se considera constante en todo tiempo. Por lo tanto cada chumacera tiene un coeficiente de fricción de Bi/2, de tal manera que debido al volante de inercia es B0 y por el disco de freno es B1. También es aplicado un par (T0) generado por el MI y un par (TL) de freno mecánico, al conjunto inercial volante y disco de freno.
Figura 2.8. Representación esquemática del sistema mecánico
(volante de inercia, disco de frenos, chumaceras y flecha).
Figura 2.9. Diagrama de cuerpo libre del sistema mecánico
Aplicando la segunda ley de Newton, al sistema mecánico mostrado esquemáticamente en las figuras 2.8 y 2.9 [anexo 2, sección A2.4.], se obtiene la ecuación diferencial [4, 34, 35]:

23
( ) ( )dt
dBBdt
dJJTT L0
1020
2
100αα
+++=+ (2.40)
Dado que la parte mecánica del MI esta acoplada con el sistema mecánico, por la variable que los relaciona (T0) en las ecuaciones (2.32) y (2.40) permitiendo integrar el sistema electromecánico. Las condiciones tomadas en cuenta son:
• 0r
ddtαω = ,
20
2r dd
dt dtαω
= ,
• para el MI, T0 es el par de carga y para el sistema mecánico, T0 es el par electromagnético (Te) generado por el MI,
• debido a la flecha que se considera rígida 2 2
0 01 12 20 1
d dd ddt dt dt dtα αα αα α= ⇔ = ⇔ = ,
• haciendo un cambio de variable donde r mω ω= y e mT T= . Así el modelo del sistema mecánico completo es [anexo 2, sección A2.4.]:
0 1 0 1m m m
m L m m md d dT T J J J B B Bdt dt dtω ω ω ω ω ω+ = + + + + + (2.41)
Donde TL es el freno aplicado al disco de frenos [anexo 2, sección A2.4.]. 2.4. MODELADO DEL SISTEMA ELECTROMECÁNICO Hasta aquí se han expuesto las ecuaciones que representan al sistema eléctrico (MI) y el sistema mecánico (rotor, volante de inercias, disco de freno, flecha y chumaceras). Las ecuaciones (2.32) y (2.40) de estos sistemas se integran para obtener el sistema electromecánico, como se muestra en la figura 2.10. Mayor detalle de esta ecuación se encuentra en el anexo 2, sección A2.4. Además se define la alimentación 3φ con un bloque llamado generador de funciones [anexo A1, sección A1.3.].
Figura 2.10. Modelo esquemático del sistema electromecánico.
El esquema mostrado en la figura 2.11 representa al sistema completo (planta), en el cual podemos apreciar las variables de entrada (amplitud del voltaje Amp(t), velocidad síncrona ωs(t) y par de freno mecánico TL(t)) y la salida generada (velocidad mecánica (ωm(t)).

24
Figura 2.11. Diagrama de bloques de la simulación de la planta, la cual tiene incluidos
el generador de funciones, el MI y el sistema mecánico. A continuación se resumen el conjunto de ecuaciones electromecánicas que definen el modelo del MI y sistema mecánico. Dichas ecuaciones han sido programadas en Matlab/Simulink® [anexo 5].
1sd rdsd s sd m
s
di diV R i Ldt L dt
⎡ ⎤= − −⎢ ⎥⎣ ⎦ (2.19)
1sq rqsq s sq m
s
di diV R i L
dt L dt⎡ ⎤
= − −⎢ ⎥⎣ ⎦
(2.20)
[ ]00 0
1ss s s
sl
di V R idt L
= − (2.21)
1rd sdr rd r m rq m m sq m
r
di diR i L i L i Ldt L dt
ω ω⎡ ⎤= − − − −⎢ ⎥⎣ ⎦ (2.22)
1rq sqr rq r m rd m m sd m
r
di diR i L i L i L
dt L dtω ω
⎡ ⎤= − + + −⎢ ⎥
⎣ ⎦ (2.23)
[ ]00
1rs r
rl
di R idt L
= − (2.24)
( )30 0 0 02 2 2e sd sd sq sq s s rd sd rq rq r rP V i V i V i V i V i V i= + + + + + (2.26)
( )32 2m m sq rd sd rq
pT L i i i i= − (2.31)
( ) ( )( )0 10 1
1mm m L
d T B B B Tdt J J Jω ω= − + + +
+ + (2.41)

25
Capítulo 3
ESTRATEGIAS DE CONTROL
El control que buscamos debe tener tres características: hacer que el MI opere en las diferentes situaciones de funcionamiento en modo generador, debe seguir una señal de referencia y de preferencia el algoritmo de control debe ser sencillo.
Para satisfacer las especificaciones de régimen permanente y del rendimiento transitorio de los propulsores de corriente alterna, la literatura propone las siguientes estrategias de control [3, 8, 33]:
• Control en régimen permanente: se pueden aplicar técnicas de control lineal en el diseño del controlador, como controlar la amplitud y frecuencia del voltaje y corriente en el estator.
• Control vectorial: también llamados control orientado al campo, se utiliza para producir servomecanismos de alto rendimiento mediante la predicción de la localización del flujo interno y la posterior inyección de corriente para interactuar de manera óptima con este flujo.
• Control adaptable: los parámetros del controlador varían en forma continua a fin de adaptarse a los cambios de la variable de salida.
Este trabajo se basará en el control en régimen permanente, el cual se implementa en dos versiones.
Primero se presenta el control convencional compuesto por un control PI que controla al MI y el control P para el freno mecánico el cual se acciona cuando alcanza los límites permisivos. Las ganancias de los controladores son determinados con el método de las reglas de Ziegler – Nichols. El control convencional conseguido se utiliza para la generación de los datos de entrenamiento obtenidos de las entradas y salidas de la planta, los cuales nos servirán para la elaboración del control inteligente.
Posteriormente, se presenta el control inteligente, iniciando con algunos conceptos de variables de estado. Esto permite establecer los fundamentos del control inteligente basado en el Núcleo Híbrido de Transición de Estados (NHTE) [47, 54, 83]. Con la ayuda de la lógica difusa se pretende obtener la correspondencia de las entradas y las salidas, a partir de los datos de entrenamiento. Para obtener la relación se hace uso de la algoritmo ANFIS® (Adaptive Neuro-based Fuzzy Inference System) con el cual se consigue construir un conjunto de reglas “si – entonces” con funciones de pertenencia apropiadas para la relación entrada – salida deseada [69]. 3.1. CONTROL CONVENCIONAL
El control debe combinar el frenado disipativo y regenerativo durante la desaceleración para obtener energía eléctrica a partir de la energía cinética almacenada en la parte mecánica de la planta. Sin embargo, el seguimiento de la referencia es prioritario.

26
El esquema de control convencional realizado se inspira en el control de lazo
cerrado por regulación de deslizamiento, que se muestra en la figura 3.1 (citado por Raschid [33]):
Figura 3.1. Control en lazo cerrado por regulación de deslizamiento
Dado que el par electromagnético de los MI es proporcional a la frecuencia de deslizamiento sωs = ωs – ωm ~ ωsl = ωref - ωm [3, 8, 33, 45], es posible controlar la frecuencia de deslizamiento en vez de la corriente del estator. El control (K1) genera la frecuencia de deslizamiento a partir del error producido por la diferencia entre la velocidad de referencia (ωref) y la velocidad mecánica (ωm) del MI, tal y como se muestra en la figura 3.1. El regulador de velocidad (K2) limita la frecuencia y en consecuencia evita que decaiga el par electromagnético a altos deslizamientos. La ganancia (K3) genera la señal de amplitud de voltaje en función de la frecuencia ωs, también se considera la caída a baja frecuencia mediante una compensación V0. Para un cambio en la velocidad, el motor acelera o desacelera dentro de los límites del par electromagnético, a un valor de deslizamiento de régimen permanente, correspondiente al par de carga. Este dispositivo controla indirectamente el par electromagnético dentro del lazo de control de velocidad.
Entonces a partir del error generado entre la velocidad de referencia (ωref) y la velocidad mecánica (ωm), se generan las señales de amplitud de voltaje (Amp) y velocidad síncrona (ωs), estableciéndose las siguientes ecuaciones:
1( ) ( )P ref m I ref m mAmp K K dt Kω ω ω ω ω= − + − +∫ (3.1)
s ( ) ( )P ref m I ref m mK K dtω ω ω ω ω ω= − + − +∫ (3.2)
La KP y KI son la ganancia del control PI. Para obtener las ganancias del controlador se utiliza el método de Ziegler – Nichols. En el anexo 3 se presenta la explicación de este método. Las señales de control de Amp y ωs son las entradas del generador de funciones para definir las señales de excitación que genera el voltaje de alimentación 3φ del MI. El anexo 1, sección A1.3 presenta el desarrollo de las ecuaciones de la excitación sinusoidal de tres fases.
La figura 3.2a muestra el control convencional y la planta, que tiene como entradas la amplitud del voltaje (Amp), la velocidad síncrona (ωs) y par de freno mecánico (TL) y como salida la velocidad mecánica (ωm).

27
Figura 3.2a. Diagrama de bloques del control convencional y su conexión al sistema (planta).
El freno mecánico se aplica en forma discontinua, por lo que se requiere
especificar cuándo y cuánto esfuerzo. El control Proporcional (P) es utilizado para generar la amplitud del par de control (TL). El freno mecánico (TL) se acciona cuando la planta cumpla las siguientes condicionales al mismo tiempo:
• La ωm es mayor a la ωref, ó el 0error < • La velocidad es descendente ó aceleración negativa, 0refd dtω < • La potencia de entrada es positiva, 0eP >
El par proporcionado por el freno mecánico es definido por:
( )L F ref mT K ω ω= − (3.3) KF = ganancia del control
En el anexo 3 se explica la metodología de Ziegler – Nichols, el método nos da un punto de partida para la sintonización de las ganancias del controlador, a partir de la respuesta a una entrada escalón, como se muestra en la figura 3.2b, se obtiene TR – tiempo de retardo, KT – constante de tiempo. Con los parámetros obtenidos y utilizando la tabla 3.1a se pueden general los controladores P, PI ó PID. El control convencional conseguido, se utiliza para la generación de los datos de entrenamiento que son tomados de las entradas y salidas del sistema (planta), los cuales nos servirán para la creación del control inteligente.
Figura 3.2b Respuesta del sistema a una
entrada escalón unitario
Tabla 3.1a. Regla de sintonización Tipo de
controlador Kp Ti Td
P T RK T ∞ 0 PI 0.9 T RK T 0.3RT 0
PID 1.2 T RK T 2 RT 0.5 RT
La ganancia de los controladores PI y P son determinadas con la metodología de Ziegler – Nichols. En la tabla 3.1b se presenta los valores obtenidos para el control convencional.

28
Tabla 3.1b. Parámetros de ganancia del control convencional.
Control PI: para (ωs) KP = 2, y KI = 0.01
Control PI: para (Amp) KP=3, KI=0.001, K1=0.05
Control P: para (TL) K2=1.6 (desaceleración), K2=8 (en ωref ≈ 0)
3.2. CONTROL INTELIGENTE
El problema central en control es encontrar una forma técnicamente realizable de actuar sobre un determinado proceso de manera que éste tenga el comportamiento deseado tanto como sea posible. Además, este comportamiento aproximado deberá lograrse aún teniendo incertidumbres en el proceso, y ante la presencia de perturbaciones externas, no controlables, actuando sobre el mismo. Una forma particularmente sencilla, aunque al mismo tiempo general, de resolver los problemas de control es a través del concepto de inversión. Lo que explica este concepto de inversión es que al invertir la relación entre entrada (u) y salida (ys) esto permite determinar qué acción es necesaria en la entrada para obtener el comportamiento de salida deseado (ref), como se muestra en la figura 3.3.
Figura 3.3. Control conceptual por inversión.
En general, podría decirse que todos los controladores generan implícitamente
una inversa del proceso, tanto como sea posible (es decir, una inversa aproximada), [5, 18, 32,38]. 3.2.1. Concepto de inversión
Una propiedad de la realimentación es aproximar la inversa implícita de transformaciones dinámicas. Iniciaremos con exponer el lazo cerrado que manejan los libros de control, como se muestra en la figura 3.4a:
Figura 3.4a. Control en lazo cerrado.
Lo anterior es equivalente al control en lazo cerrado de la figura 3.4b, al cual se le agrega una planta idéntica a la salida del controlador, sólo para propósitos de explicación. Como las dos plantas tienen la misma señal de control tendrán el mismo comportamiento.

29
Figura 3.4b. Control en lazo cerrado mas una planta conectada a la salida del controlador.
Reagrupando el lazo cerrado se obtiene el esquema que se muestra en la figura 3.4c.
Figura 3.4c. Esquema del controlador por inversión.
Analizando el diagrama a bloques de la figura 3.4c se puede explicar el comportamiento del concepto de inversión y sus limitantes. Donde f (o) : modelo de la planta. h(o) : ganancia directa de lazo. ref : señal de referencia. u : señal de control. ys : salida de la planta. Sea ( )sy f u= y ( )u controlador ref= entonces ( ) ( )1
su f y controlador ref−= = .
Suponiendo un buen control, sy ref y entonces ( ) ( )1f ref controlador ref− . De lo anterior se deduce que el controlador se aproxima a una función de planta inversa.
En conclusión: se genera una señal de control parecido al de una planta inversa siempre y cuando se realimente con un error próximo a cero.
Basándose en el concepto de inversión para la obtención del control, se retoma otro concepto que es la base para la comprensión del método: el concepto de transición de estado que define una función que relaciona entrada – salida en un intervalo de tiempo T. Tomando estas dos bases se enuncia el principio del NHTE. 3.2.2. Concepto de variables de estado
El estado de un sistema dinámico representa la cantidad mínima de información sobre el sistema en el momento t0 necesaria para determinar el comportamiento futuro con base en las entradas en t0 y las entradas futuras, donde el término de sistema es “una relación entre entradas y salidas” [1, 92]. En consecuencia, una forma de construir un modelo del sistema consiste en escribir ecuaciones que describan el estado del modelo físico con respecto del tiempo, ya que es posible obtener el comportamiento del sistema resolviendo el modelo para el estado en cualquier instante.

30
i) La figura 3.5a muestra la definición de sistema.
El tipo de sistema podría denotarse matemáticamente por la relación [1, 92]:
[ ]y S u= (3.4)
Figura 3.5a. Esquema de la relación entrada-salida
Donde el sistema consiste en:
1. Un conjunto de entradas, u, cuyos elementos son funciones del tiempo definidas en el intervalo [t0, ∞).
2. Un conjunto de salidas, y, cuyos elementos son funciones del tiempo definidas en el intervalo [t0, ∞).
3. Una función S, que define una correspondencia univoca entre los elementos del conjunto de las salidas, y[tc, ∞) = Su[tc, ∞).
ii) La figura 3.5.b muestra la propiedad de causalidad que nos limita la dependencia
de la salida en el intervalo [tc, t] a las entradas en el mismo intervalo. En los sistemas causales, para cualquier tc < t, se cumple que [1, 92]:
[ ] [ ] , ,c ct t t ty S u= (3.5)
Figura 3.5b. Esquema de la propiedad de causalidad
El segmento de salida y[tc,t] depende únicamente de la entrada u[tc,t]. En particular, el valor de la salida en un instante arbitrario t1 es una función del segmento de entrada aplicado hasta entonces, esto es u[tc, t1]; en cambio, los sistemas anticipatorios tienen la característica que en algún instante t2, el valor de la salida y(t2) depende de algún valor de u en el segmento (t2, ∞).
iii) La figura 3.5c muestra la definición del estado al tiempo t0 nos limita la
dependencia de la salida en el intervalo [t0, t] al estado dado y la entrada en el intervalo [t0, t], como [1, 92]:
[ ] ( ) [ ] 0 00, ,,t t t ty F X t u= (3.6)
Figura 3.5c. Esquema de la definición de estado
donde X(t0) es la clase de equivalencia a la cual pertenece u[tc, to]. Ahora sí t = t0, puede concluirse que:
31
( ) ( ) ( )0 0 0,y t f X t u t= ⎡ ⎤⎣ ⎦ (3.7)
Lo cual significa que f, la función que determina el valor de la salida en cualquier tiempo t0, depende únicamente de la clase de equivalencia de la entrada aplicada hasta entonces y el valor de la entrada en t0 [1, 5, 18, 23, 29, 40, 92].
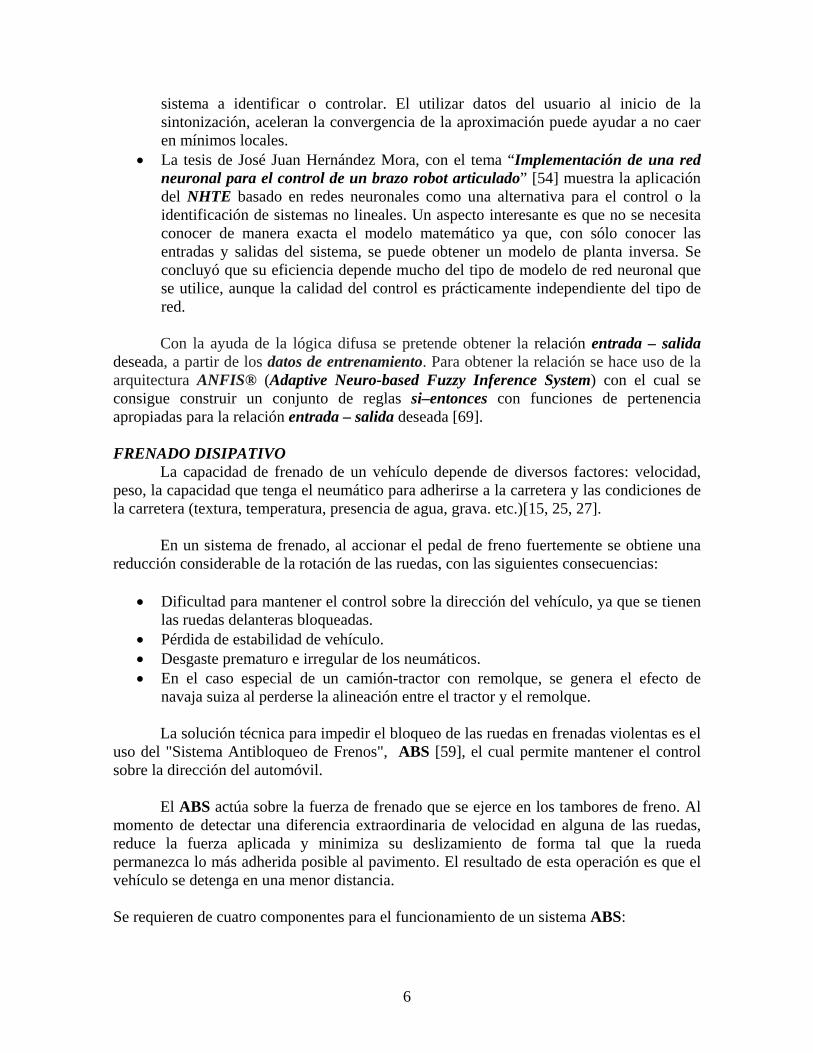
iv) La figura 3.5d muestra la ley de transición de estado nos permite encontrar
el nuevo estado X(t1) al que transita el sistema que inicia en un estado X(t0) y es sometido a una entrada u definida en el intervalo [t0,t1]. Asociado a esta representación hay una función de salida f(X(t1), u(t1)) que nos permite determinar la salida y(t1) como función del estado actualizado únicamente, o bien de éste y el valor de la entrada actual, u(t1). Entonces si
( ) ( ) [ ]( )1 0 0 1, ,X t f X t u t t= es:
( ) ( ) ( ) 1 1 1,y t X t u tφ= (3.8)
Figura 3.5d. Esquema de la transición de estado
Esta última función es muy difícil de derivar para sistemas no lineales, por lo
cual es valioso el Núcleo Hibrido de Transición de Estados (NHTE) como método de aproximación a partir de datos. “La ventaja que se obtiene con esta descripción es que dado el sistema, es posible determinar la salida a partir de cualquier instante, si se conoce el estado en que se encuentra y el segmento de entrada que se aplicará a partir de entonces”. [1] Hasta aquí, el método aquí derivado es muy general:
• Sólo requiere causalidad y determinismo. • Vale para sistemas de parámetros concentrados o distribuidos, lineales o no
lineales, parámetros variantes e invariantes en el tiempo. Es por tanto una base convincente para un método de control que quiera ser aplicado. Una restricción que se tomará es la de parámetros invariantes en el tiempo. En la siguiente sección se planea una herramienta idónea para obtener la función que relacione la entrada – salida, a partir de datos de entrenamiento obtenidos de las entradas y salidas de la planta. 3.2.3. Núcleo hibrido de transición de estados (NHTE)
El NHTE se basa en el concepto de variables de estado, en particular la función de transición de estados [1, 5, 23, 40, 47, 77, 78, 83, 92]. Se consideran los parámetros de la planta invariantes en el tiempo, así como el periodo de muestreo de T segundos

32
constante. Entonces la planta a controlar tiene estados XN-1(t), con entradas UP-1(t) (antecedente) y salida XK(t+T) (consecuente), como se muestra en la figura 3.6.
Figura 3.6. Identificación de una componente del estado de la planta con NHTE.
Sea ( ) ( ) ( ) ( )0 1 1, , ,
TNX t x t x t x t−= ⎡ ⎤⎣ ⎦K una representación del estado de la planta,
y la salida y(t), de una componente de X(t) y sea Φ la función de la transición de estado. Entonces se consigue que ( ) ( ) [ ]( )1 0 0 1, ,X t X t u t t= Φ donde [ ]0 1,u t t es la función de
entrada para t ∈ [ ]0 1,t t [1, 77, 83, 92]. La función de transición del estado Φ tiene la característica para un intervalo de muestreo: En el intervalo de muestreo (t0, t0+T): ( ) ( ) [ ]( )0 0 0 0, ,X t T X t u t t T+ = Φ + En el intervalo de muestreo (t0+T, t0+2T):
( ) ( ) [ ]( ) [ ]( )0 0 0 0 0 02 , , , , 2X t T X t u t t T u t T t T+ = Φ Φ + + +
( ) ( ) [ ]( )0 0 0 02 , , 2X t T X t T u t T t T+ = Φ + + + En el intervalo de muestreo (t0+2T, t0+3T):
( ) ( ) [ ]( ) [ ]( ) [ ]( )0 0 0 0 0 0 0 03 , , , , 2 , 2 , 3X t T X t u t t T u t T t T u t T t T+ = Φ Φ Φ + + + + +
( ) ( ) [ ]( )0 0 0 03 2 , 2 , 3X t T X t T u t T t T+ = Φ + + + y así sucesivamente.
Se considera una estructura de Φ en filas Φ0, Φ1,…, ΦN-1. Donde cada Φk es un bloque con XN-1(t) entradas y una salida U(t). Para la obtención de los Φk, el sistema de tiempo continuo, se elije un tiempo de muestreo T, restringiendo las señales de entrada a intervalos constantes [t0, t0+T], de modo que u[t0, t0+T]=u(t0).
Entonces la evolución del vector del estado X(t), puede ser especificado como ( ) ( ) ( )( )k 0 0 0,kX t T X t u t+ = Φ con k = 0, 1, 2,…, N-1.
Donde Φk significa que tiene un valor único para cada punto en el espacio de
discusión. El mapeo Φk se puede ver como funcionamiento de un espacio de estado con respecto a las entradas u [1, 5, 23, 40, 47, 83, 92].

33
La situación más común es que sólo tenemos acceso a una componente de X, digamos X0. Entonces tenemos que utilizar algún medio para estimar las componentes del estado. En la práctica, se usan redes neuronales o lógica difusa para aproximar la función de transición de estados. Esto se debe a la capacidad que tienen estos métodos para encontrar las correlaciones o las proyecciones de unas variables sobre otras. Una vez adquiridos los datos de entrenamiento de la planta, es posible obtener un controlador de planta inversa. Con este controlador de planta inversa es posible generar controles U que hagan transitar a la planta desde su estado inicial X(t) a un estado siguiente X(t+T) que especifiquemos, como se muestra en la figura 3.7a. El tiempo entre los dos estados sucesivos es constante de T segundos. La limitación del control NHTE es que el estado deseado no puede estar muy lejos del estado actual. La ventaja es que el estado deseado se obtiene exactamente en T segundos (más o menos ruido y errores de medición). Si queremos alcanzar un estado “lejano” del estado actual, debemos hacerlo en varios pasos pequeños de T segundos cada uno [47, 54, 83].
Figura 3.7a. Controlador de planta Figura 3.7b.- Control NHTE acoplado a la planta
inversa con NHTE A la hora de usar el controlador NHTE, en X(t) se alimenta el estado real o estimado de la planta. En X(t+T) se alimenta el estado deseado, donde al menos una de las componentes proviene de la señal de consigna, como se muestra en la figura 3.7b. Como resultado, la red neuronal o el control difuso responderán con el control U(t) que debemos aplicar a la planta durante el intervalo [t, t+T). Para el caso de contar con más de una entrada, es necesario emplear sistemas difusos acoplados, en donde cada uno de ellos infiere una salida diferente. Dado que deseamos obtener un control U(t) en un sólo paso, debemos definir X(t+T) en sólo una de sus componentes (la correspondiente a la salida). Las demás quedan libres de lo contrario no habría solución en general. El objetivo de esta metodología es conseguir una identificación inversa, donde la composición de Pp
-1 y e-sTPp resultará ser Pp-1(e-sTPp)= e-sT. Al tener esto en cuenta, se
encuentra que al aplicar a la entrada de Pp-1 una señal de referencia yref, y ser operada
por Pp-1 y e-sTPp resultará una salida y ≈ e-sTyref.
Interpretación: El NHTE actúa como un interpolador de entradas (antecedente) más una salida (consecuente). Esto es lo que logra la capacidad de “generalización” de la red neuronal o la lógica difusa. No sólo será capaz de asociar la salida a las entradas “conocidas”, sino que podrá inferir e interpolar la salida cuando las entradas son nuevas, siempre y cuando estén dentro del espacio compacto abarcado por los datos de entrenamiento [47, 54, 83].

34
El NHTE explica el porqué funcionan muchos esquemas de control inteligente. En la medida en que dicho control se asemeje al NHTE, que es una identificación de la planta por variables de estado, será capaz de emular la planta. Si la información no contiene el estado de la planta, el sistema sólo podrá asociar entradas a salidas para los datos de entrenamiento [47, 54, 83]. Las herramientas que se han propuesto para la implementación del método son:
• Redes neuronales en la tesis de José Juan Hernández Mora [54]. • Lógica difusa con el método de gradiente descendente en la tesis de Rodolfo
Castillo Romero [47]. • Para este trabajo se probó con el algoritmo ANFIS® (Adaptive Neuro-based
Fuzzy Inference System) [anexo 4], herramienta de Matlab/Simulink®. El cual es utilizado para obtener la función que relacione entrada – salida, a partir de datos de entrenamiento obtenidos de las entradas y salidas de la planta.
3.2.4. Obtención del control inteligente Para obtener el controlador NHTE de la figura 3.7b se aplica la herramienta ANFIS® a las señales de entrada y salida de la planta. Para obtener estas señales (datos de entrenamiento ), la planta es excitada con ayuda del control convencional para que siga una señal de referencia. Las señales de entrada y salida deben cubrir todo el rango dinámico que pudiera ocurrir en operación normal [47, 82, 83]. Para aproximar el estado de una planta cuya dinámica es de orden mayor que uno es necesario considerar tanto entradas como salidas atrasadas en el tiempo [47]. Los datos de entrenamiento obtenidos en un tiempo de muestreo ∆t, tienen la siguiente estructura (x1, x2,..., xn, u), en donde cada uno de los valores xi contiene un valor posible, dentro de cada uno de los antecedentes de las reglas de un sistema difuso, mientras que el valor u representa el consecuente de la salida deseada u objetivo esperado como respuesta a una entrada con valores x1, x2,..., xn. Teniendo en cuenta esta estructura, es posible visualizar la manera en la cual se realiza el proceso de sintonización ó aprendizaje, como se muestra en la figura 3.8. La figura 3.8a muestra el esquema de obtención de los datos de entrenamiento para el control difuso que genera las señales de control amplitud de voltaje (Amp) y velocidad síncrona (ωs), usando como antecedentes las señales ωs(k-T), ωm(k), ωm(k-T), y Amp(k-T) por medio del método NHTE.
La figura 3.8b muestra el esquema de obtención de los datos de entrenamiento para el control difuso del freno mecánico, donde se toman las variables de velocidad de referencia (ωref), y el error el cual es generado por la diferencia de la velocidad de referencia (ωref) y la velocidad mecánica (ωe) de la planta, para generar el par (TL)
a) b)
Figura 3.8.Obtención de los datos de entrenamiento, a) obtención del control difuso para el MI, b) obtención del control difuso para el freno mecánico.

35
Los datos de entrenamiento obtenidos tienen una estructura de la forma nf×mc, donde las nf – filas corresponden a los instantes de muestreo en los cuales son tomados los datos y las mc – columnas corresponden a los antecedentes y el consecuente. El tiempo de muestreo T es constante durante la etapa de la adquisición de datos. Una vez obtenidas los datos de entrenamiento de entrada y salida de la planta, se utilizó ANFIS® para la sintonización de las reglas de aprendizaje, como se muestra en el Anexo 6. Para saber cuantas reglas de aprendizaje son generadas se toma la siguiente ecuación:
1
q
k reglask
C N=
=Π (3.9)
donde Ck = número de conjuntos o premisas. q = número de antecedentes. Nreglas = número de reglas La figura 3.9 muestra el esquema del control inteligente, el cual tiene una característica con relación a las variables de control Amp y ωs: que el consecuente de uno es el antecedente del otro. También se observa el esquema general, en el cual el control inteligente controla la planta. Si observamos el bloque de control difuso Pp
-1, se toma en cuenta el mismo orden de los antecedentes y el consecuente, como fueron tomados los datos de entrenamiento, como se mostró en la figura 3.8.
Figura 3.9. Diagrama de bloques del control Difuso y su conexión con el sistema electromecánico.
En conclusión: se han expuesto las estrategias del control convencional y su implementación en Matlab/Simulink® [anexo 5] y los fundamentos del control moderno sobre los que se basa el control inteligente, y la forma de la implementación en Simulink® [anexo 5]. El control convencional sirve de dos formas:
• Facilita la generación de datos de entrada – salida de la planta para la sintonizar el control inteligente.
• Sirve como referencia al desempeño del control inteligente. El siguiente paso es proponer una señal de referencia yref(t) que represente el manejo del conductor en diferentes momentos de aceleración, velocidad constante y desaceleración. Esta señal de referencia permitirá observar el desempeño de los dos controladores y la respuesta del sistema (planta).

37
Capítulo 4
RESULTADOS DE SIMULACIÓN
Se presenta la validación del modelo del MI por comparación con el MI real. Sus parámetros son retomados de la tesis de Nandayapa y Hernández [56]. Las pruebas realizadas del MI real como del modelo son sin carga. Con auxilio del control convencional, la planta es excitada para que siga una velocidad de referencia (ωref), la cual debe cubrir todas las condiciones de trabajo que pudieran ocurrir en condiciones normales. Obtenidos los diferentes datos de entrenamiento se hace usó de la herramienta ANFIS® de Matlab/Simulink® [anexo 4], aquellos datos que proporcionen el menor error de seguimiento de la señal de consigna y sintonización, son considerados para el control inteligente.
El modelo del MI en términos del marco de referencia fijo al estator dq0 y las ecuaciones de voltaje, es programado en Matlab/Simulink® [6, 7, 26, 31], [anexo 5]. Por otro lado, se compara el desempeño de los controles convencional e inteligente que son presentados en el capítulo 3 ante diferentes situaciones que puede presentarse en un vehículo eléctrico. A partir de éstos resultados se realiza un análisis de cada una de las variables, que permita validar el sistema completo. 4.1. VALIDACIÓN DEL MODELO DEL MI EN LAZO ABIERTO La validación de la implementación del modelo del MI sin carga, se basó por un lado a) en datos de motores simulados en la literatura [28], y b) en datos obtenidos experimentalmente para un motor de laboratorio comparando su respuesta con la simulación. a) Del libro Control and Dynamic of AC Drives [28] página 78, se retoman los parámetros del MI en términos del marco de referencia fijo al estator, los cuales son los siguientes:
Tabla 4.1. Parámetros del MI [28]. Rs = 0.531Ω Lm = 0.847H. Rr = 0.408 Ω 230 V/60Hz. J = 0.1 Kg/m2 4 polos Lls = Llr = 0.00252 H. 5 Hp (3.73 Kilowatts)
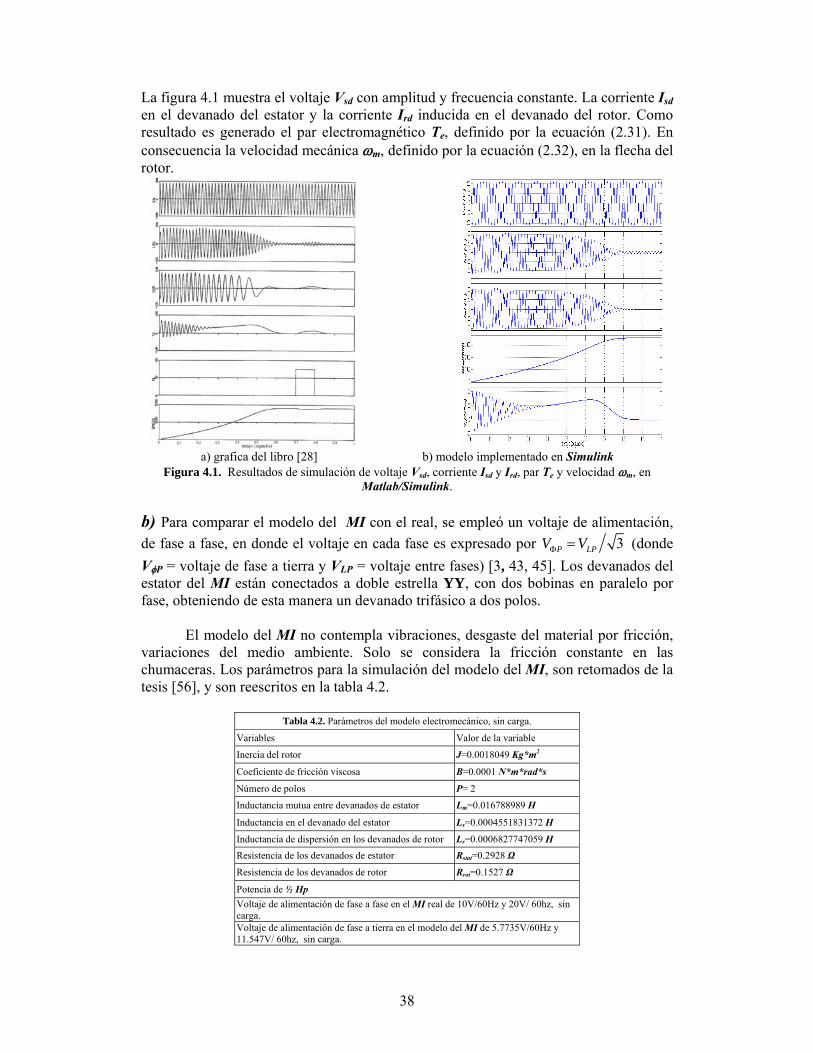
38
La figura 4.1 muestra el voltaje Vsd con amplitud y frecuencia constante. La corriente Isd en el devanado del estator y la corriente Ird inducida en el devanado del rotor. Como resultado es generado el par electromagnético Te, definido por la ecuación (2.31). En consecuencia la velocidad mecánica ωm, definido por la ecuación (2.32), en la flecha del rotor.
a) grafica del libro [28] b) modelo implementado en Simulink
Figura 4.1. Resultados de simulación de voltaje Vsd, corriente Isd y Ird, par Te y velocidad ωm, en Matlab/Simulink.
b) Para comparar el modelo del MI con el real, se empleó un voltaje de alimentación, de fase a fase, en donde el voltaje en cada fase es expresado por 3P LPV VΦ = (donde VφP = voltaje de fase a tierra y VLP = voltaje entre fases) [3, 43, 45]. Los devanados del estator del MI están conectados a doble estrella YY, con dos bobinas en paralelo por fase, obteniendo de esta manera un devanado trifásico a dos polos.
El modelo del MI no contempla vibraciones, desgaste del material por fricción, variaciones del medio ambiente. Solo se considera la fricción constante en las chumaceras. Los parámetros para la simulación del modelo del MI, son retomados de la tesis [56], y son reescritos en la tabla 4.2.
Tabla 4.2. Parámetros del modelo electromecánico, sin carga.
Variables Valor de la variable
Inercia del rotor J=0.0018049 Kg*m2
Coeficiente de fricción viscosa B=0.0001 N*m*rad*s
Número de polos P= 2
Inductancia mutua entre devanados de estator Lm=0.016788989 H
Inductancia en el devanado del estator Ls=0.0004551831372 H
Inductancia de dispersión en los devanados de rotor Lr=0.0006827747059 H Resistencia de los devanados de estator Rstat=0.2928 Ω
Resistencia de los devanados de rotor Rrot=0.1527 Ω
Potencia de ½ Hp Voltaje de alimentación de fase a fase en el MI real de 10V/60Hz y 20V/ 60hz, sin carga. Voltaje de alimentación de fase a tierra en el modelo del MI de 5.7735V/60Hz y 11.547V/ 60hz, sin carga.

39
Cuando el MI es alimentado de fase a fase con 10V/60Hz, sin carga. La figura 4.2a muestra los resultados experimentales obtenidos en osciloscopio de la corriente de fase y voltaje de fase a fase.
Figura 4.2a. Medición (corriente y voltaje) mediante el osciloscopio:
canal uno: 5 V/div, canal dos: 10 A/div,
tiempo: 4 segundos por división.
La figura 4.2 muestra el comportamiento del modelo analítico del MI durante el transitorio de arranque y hasta que alcanza el estado estable. El par electromagnético (Te) generado, muestra el par necesario para vencer la inercia del rotor en reposo y mantenerlo a una velocidad mecánica (ωm) constante.
Figura 4.2b. Resultados de simulación del modelo del MI en Matlab/Simulink.
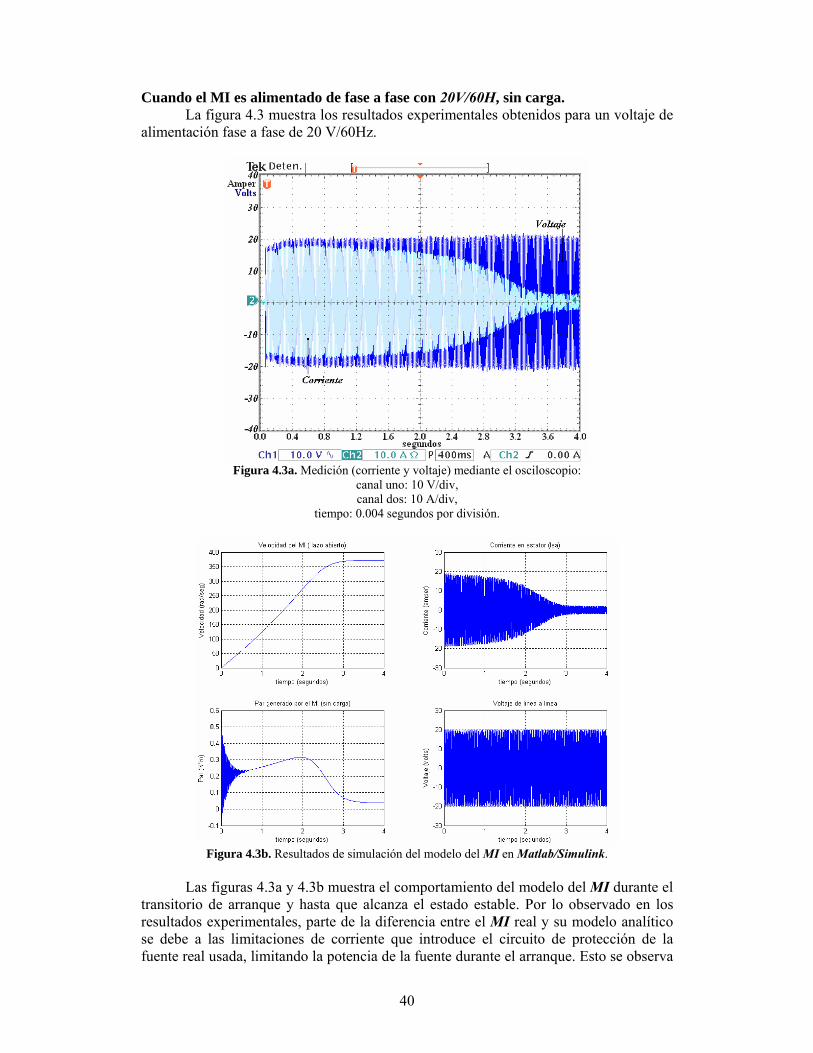
40
Cuando el MI es alimentado de fase a fase con 20V/60H, sin carga. La figura 4.3 muestra los resultados experimentales obtenidos para un voltaje de
alimentación fase a fase de 20 V/60Hz.
Figura 4.3a. Medición (corriente y voltaje) mediante el osciloscopio:
canal uno: 10 V/div, canal dos: 10 A/div,
tiempo: 0.004 segundos por división.
Figura 4.3b. Resultados de simulación del modelo del MI en Matlab/Simulink.
Las figuras 4.3a y 4.3b muestra el comportamiento del modelo del MI durante el transitorio de arranque y hasta que alcanza el estado estable. Por lo observado en los resultados experimentales, parte de la diferencia entre el MI real y su modelo analítico se debe a las limitaciones de corriente que introduce el circuito de protección de la fuente real usada, limitando la potencia de la fuente durante el arranque. Esto se observa
41
en la figura 4.3a en el intervalo de tiempo 0.0 a 0.4 segundos, no así en la figura 4.2a donde no es muy notorio por el bajo nivel de la excitación.
Al comparar los resultados obtenidos tanto en simulación como experimental, se observa que son muy similares y con esto podemos afirmar que el modelo analítico del MI ha sido implementado correctamente. 4.2. SIMULACIÓN EN LAZO CERRADO
Para la simulación en lazo cerrado se toma el esquema de la planta definida en el capítulo 2, como se observa nuevamente en la figura 4.4, las variables de entrada amplitud del voltaje (Amp), velocidad síncrona (ωs) y par de freno mecánico (TL) y como salida la velocidad mecánica (ωm)
Figura 4.4. Esquema de la planta, la cual tiene incluidos el generador de funciones, el MI y el sistema mecánico.
Condiciones de simulación: Los parámetros de la planta que se muestran en la tabla 4.3, se consideran invariantes en el tiempo, igualmente para las ganancias del control convencional, los cuales fueron expuestos en el capitulo 4 y se muestran nuevamente en la tabla 4.4. El tiempo de muestreo ∆T se establece de 0.1 segundos e invariante en el tiempo, tanto para adquisición de los datos de entrenamiento como para la actualización del control inteligente cuando controle la planta.
En la práctica la velocidad de referencia (ωref) queda determinada por la capacidad del auto, las pretensiones del conductor durante el trayecto y las condiciones de la carretera. Entonces la velocidad de referencia (ωref) usada en la simulación se propuso tomando en cuenta que en los datos de entrenamiento:
• El espacio de trabajo quedará bien cubierto usando velocidades superiores a las que se desea trabajar.
• Hubiera suficientes muestras de varias tasas de aceleración, desaceleración y velocidad constante.
La velocidad máxima que se maneja es de 160rad/seg. ≈ 28.8m/seg. ≈
1527.887rpm. ≈ 103.68Km/h [la comparación del sistema mecánico con la masa vehicular se muestra en el capítulo 2, sección 2.2].

42
Tabla 4.3. Parámetros del modelo electromecánico, con carga
Variables Valor de la variable
Inercia del rotor J=0.0018049 Kg*m2
Coeficiente de fricción viscosa B=0.0001 N*m*rad*s
Número de polos P= 2
Inductancia mutua entre devanados de estator Lm=0.016788989 H
Impedancia mutua Xm=6.3293 Ω
Inductancia en el devanado del estator Ls=0.0004551831372 H
Impedancia en el devanado del estator Xs=0.1716 Ω
Inductancia de dispersión en los devanados de rotor Lr=0.0006827747059 H
Impedancia en el devanado de rotor Xr=6.3293 Ω
Resistencia de los devanados de estator Rstat=0.2928 Ω
Resistencia de los devanados de rotor Rrot=0.1527 Ω
Momento de inercia del volante J0=0.1232999 Kg*m2
Momento de inercia del disco de freno J1=(J0/1000) Kg*m2
Fricción viscosa B0=0.0003 N*m*rad*s
Fricción viscosa B1=B0/100 N*m*rad*s
Tabla 4.4. Parámetros de ganancia del control
Control PI: para (ωs) KP = 2, y KI = 0.01
Control PI: para (Amp) KP=3, KI=0.001, K1=0.05
Control P: para (TL) K2=1.6 (desaceleración), K2=8 (en ωref ≈ 0)
∆T (control difuso) 0.1segundo.
Duración del entrenamiento65 segundos
Numero de datos 651 datos / por cada variable
4.2.1. Obtención del control inteligente
La figura 4.5 muestra la planta controlada por el control convencional para que siga una señal de referencia, la cual debe de cubrir todo el rango dinámico que pudiera ocurrir en operación normal [42, 44, 47, 52, 58, 54, 69] [capítulo 3, sección 3.5]. Los datos de entrenamiento son obtenidos de las entradas y salidas de la planta, con un tiempo de muestreo de 0.1 segundos como se muestra en la figura 4.6 y en la tabla 4.4.
Figura 4.5. Control convencional y planta, definido en el capítulo 3.
La señal de referencia se diseñó de tal forma que en los datos de entrenamiento estén mínimamente representadas muestras de todas las condiciones de manejo. En particular aceleraciones, desaceleraciones y velocidades constantes en diferentes niveles.

43
La figura 4.7 muestra las variables: velocidad de referencia (ωref), velocidad mecánica (ωm) generada por el sistema (planta), velocidad síncrona (ωs), amplitud de voltaje (Amp), generadas por el controlador, par de freno mecánico (TL) y error generado por la diferencia entre la velocidad de referencia (ωref) y la velocidad mecánica (ωm), las cuales serán utilizadas para la sintonización del control inteligente.
Figura 4.6. Variables a ser utilizadas para la obtención del control inteligente.
Una vez obtenidos los diferentes datos de entrenamiento, que determinan la
dinámica de la planta, se usa ANFIS® [anexo 4, sección 4.6] para sintonizar las reglas difusas del control inteligente, cuyos detalles se muestran en el anexo 6.
Figura 4.7. Control inteligente y planta, definido en el capítulo 3.
4.2.2. Análisis comparativo del control convencional e inteligente.
Se plantea una velocidad de referencia (ωref) con aceleración (1 a 11 seg.), velocidad constante (11 a 21 seg.) y desaceleración (21 a 31 seg.) para observar el comportamiento de la planta y los controles convencional (con) e inteligente (int).

44
En la figura 4.8a La velocidad síncrona ωs es mayor a la ωref durante la
aceleración, mientras que en la desaceleración es menor que ωref, El par de freno mecánico TL es aplicado en el momento de la desaceleración
0 Figura 4.8a. Graficación de velocidad de referencia (ωref), velocidad síncrona (ωs), amplitud del voltaje
(Amp) y par de freno mecánico (TL), aplicando control convencional (con) e inteligente (int).

45
En la figura 4.8b, la disminución del voltaje Vsd y la corriente Isd se deben a la aplicación del par TL, en consecuencia el par electromagnético Tm disminuye.
Figura 4.8b. Graficación de velocidad de referencia (ωref), voltaje (Vsd) y corriente (Isd) en el estator del
MI y par electromagnético (Tm) generado por la planta, aplicando control convencional (con) e inteligente (int).
La figura 4.8c muestra una ωm menor a la ωref durante la aceleración, mientras
que en la desaceleración ωm es mayor que ωref, La potencia de entrada Pe durante la aceleración es positiva y durante la desaceleración es negativa. Observando las variables ωm, ωs, y Pe en el momento de la desaceleración, vemos que el MI esta en modo generador pues se cumplen las condiciones de la sección 2.1.3.1.

46
Figura 4.8c. Graficación de velocidad de referencia (ωref), velocidad mecánica (ωm) generada por la
planta, aceleración (dωm), potencia de entrada (Pe) y potencia de salida (Ps), aplicando control convencional (con) e inteligente (int).

47
La figura 4.8d muestra el par aplicado al rotor (Tjr), volante de inercia (Tjv), y disco de frenos (Tjd) en cada instante de tiempo, los cuales están definidos de la siguiente manera:
mjr
dT Jdtω
= ; 0m
jvdT Jdtω
= ; 1m
jddT Jdtω
=
Figura 4.8d. Graficación de velocidad de referencia (ωref), par aplicado al rotor (Tjr), volante de inercia
(Tjv) y disco de freno (Tjd), aplicando control convencional (con) e inteligente (int).
La figura 4.8e muestra el par aplicado a las chumaceras debido al rotor (Tbr), volante de inercia (Tbv), y disco de frenos (Tbd) los cuales están definidos de la siguiente manera: br mT Bω= ; 0bv mT B ω= ; 1bd mT Bω= .
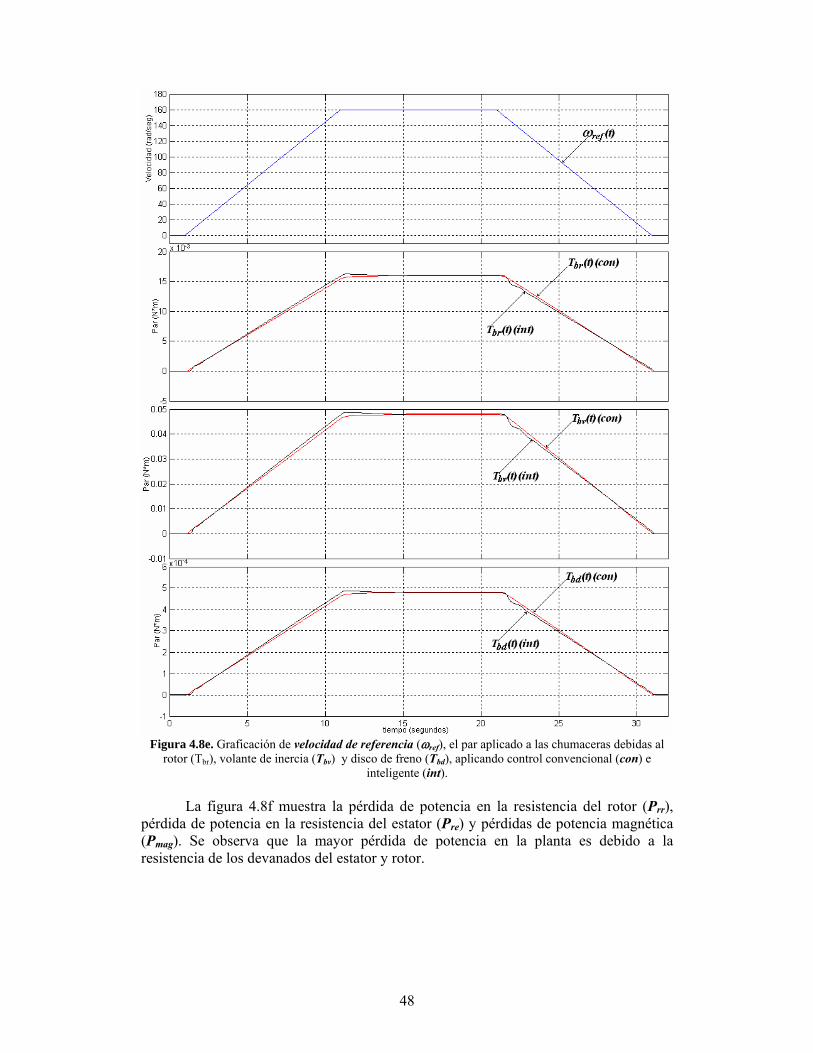
48
Figura 4.8e. Graficación de velocidad de referencia (ωref), el par aplicado a las chumaceras debidas al
rotor (Tbr), volante de inercia (Tbv) y disco de freno (Tbd), aplicando control convencional (con) e inteligente (int).
La figura 4.8f muestra la pérdida de potencia en la resistencia del rotor (Prr),
pérdida de potencia en la resistencia del estator (Pre) y pérdidas de potencia magnética (Pmag). Se observa que la mayor pérdida de potencia en la planta es debido a la resistencia de los devanados del estator y rotor.

49
Figura 4.8f. Graficación de velocidad de referencia (ωref), potencia en rotor (Prr), potencia en el estator (Pre) y potencia magnética en el núcleo (Pmag), aplicando control convencional (con) e inteligente (int).
4.2.1. Validación de la simulación
Se analizan 3 instantes de tiempo (6 seg., 16 seg., 26seg.) durante el trayecto: aceleración, velocidad constante y desaceleración, como se muestra en las figuras 4.8a, 4.8b, 4.8c, 4.8d, 4.8e, 4.8f. En las tablas A4.5, A7.1., A7.2., A7.3., [anexo 7], se muestran los valores que toman las variables de interés en cada instante.
- Variables de velocidad y control - Variables de par - Variables de potencia

50
Tabla 4.5a. Variables del control y planta segundo 6 16 26 Tiempo ωref 80 160 80 Velocidad de referenciaωm 75.888 159.26 84.76 Control convencional ωm 78.298 160.64 82.838 Control inteligente
dωm/dt 15.581 0.021883 -16.697 Control convencional dωm/dt 15.802 0.038968 -15.537 Control inteligente ωs 84.258 161.21 75.447 Control convencional ωs 88.443 162.08 72.079 Control inteligente
Amp 16.146 10.243 -10.022 Control convencional Amp 16.601 11.271 -8.7952 Control inteligente Tm 1.9796 0.06644 -2.055 Control convencional Tm 2.0082 0.06913 -1.9107 Control inteligente TL 0 0 0 Control convencional TL 0 0 0 Control inteligente Pe 238.13 16.36 -79.643 Control convencional Pe 254.1 18.203 -69.661 Control inteligente Ps 150.23 10.581 -174.18 Control convencional Ps 157.24 11.105 -158.28 Control inteligente
Haciendo las operaciones correspondientes para: Par:- El par (Tm) con el par (Ts) de la planta
Ts = Tjr + Tjv + Tjd + Tbr + Tbv + Tbd – TL. Potencia:- La potencia de entrada (Pe) con la potencia suma (Potsuma).
Psuma= Pre+Pmag+Prr+Ps
Con el análisis numérico que se realizó en el anexo 7, se verificaron las ecuaciones implementadas en Matlab/Simulink®. Se observan diferencias despreciables de par (Tm) con el par (Ts) y la potencia de entrada (Pe) con potencia suma (Psuma). Con este análisis se determinó una correcta implementación del modelo. 4.2.2. Energía Para calcular la energía que se puede aprovechar, es necesario conocer la energía que se genera al desacelerar el volante de inercia cuando está presente el freno regenerativo, y a esa energía restarle la energía que se transforma y que no se puede aprovechar debido a las propiedades de los materiales. Para obtener un equilibrio de energías es necesario que la suma total de todas las energías de entrada y salida sean igual a cero, por lo tanto la energía de la planta es:
0e re mag rr sE E E E E= + + + =∑ Donde
e eE P dt= ∫ , energía de entrada en el estator,
re reE P dt= ∫ , energía disipada en la resistencia del devanado del estator,
mag magE P dt= ∫ , energía disipada por el campo magnético en el núcleo,
rr rrE P dt= ∫ , energía disipada en la resistencia del devanado del rotor,
s sE P dt= ∫ , energía de salida en el sistema mecánico.

51
Figura 4.9a. Energías en la entrada del estator (Ee), pérdidas en la resistencia del devanado del estator (Ere), pérdidas por el campo magnético en el núcleo (Emag), pérdidas en la resistencia del devanado del
rotor (Err), y energía en la parte mecánica de la planta (Es).

52
En la figura 4.9a muestran las energías respectivas de cada una de las variables, donde la mayor pérdida de energía es debida a los devanados del estator Ere y rotor Err de MI, en el momento de desacelerar la planta (intervalo de tiempo de 21 a 31 segundos). Para saber cuanta energía es recuperable durante la desaceleración se realiza la siguiente operación:
( )( )reg s re mag rrE P P P P dt= − + +∫
Entonces la energía recuperable es de aproximadamente 620 Joules para la planta controlada por control inteligente y 680 por el control convencional. Esto se puede ver en la energía de entrada Ee. Las pérdidas en los devanados del MI, reducen la obtención de regeneración de energía, como se muestra en la figura 4.9a. En el anexo 8 se muestra una comparación de energía a diferentes pruebas de desaceleración.
Figura 4.9b. Energía regenerada (Ereg) de la planta, aplicando control convencional e inteligente.
4.2.3. Planta con perturbación A la planta le es aplicada una perturbación (ó la suma de fuerzas externas sobre el vehículo) de forma trapezoidal con una duración de 3 segundos y amplitud de 2 N*m, como se muestra en la figura 4.10a., y se registra el comportamiento de las señales de control y el seguimiento de la referencia.
• En el momento de la aceleración: es aplicado un par negativo, para disminuir la aceleración en el instante de 4seg., esto simula un automóvil en una pendiente ascendente.
• En el momento de la velocidad constante: es aplicado un par negativo, para
disminuir la velocidad en el instante 15 seg., esto simula un automóvil en una pendiente ascendente.

53
• En el momento de la desaceleración: es aplicado un par positivo, para evitar la
desaceleración en el instante 24 seg., esto simula un automóvil en una pendiente descendente.
La figura 4.10a muestra las perturbaciones aplicadas y las señales generadas por el control convencional e inteligente que compensan dichas perturbaciones, así como el seguimiento de la velocidad de referencia ωref ante las perturbaciones.
Figura 4.10a. Graficación de velocidad de referencia (ωref), velocidad síncrona (ωs), amplitud del voltaje (Amp), par de freno mecánico (TL) y perturbación, aplicando control convencional (con) e inteligente
(int).
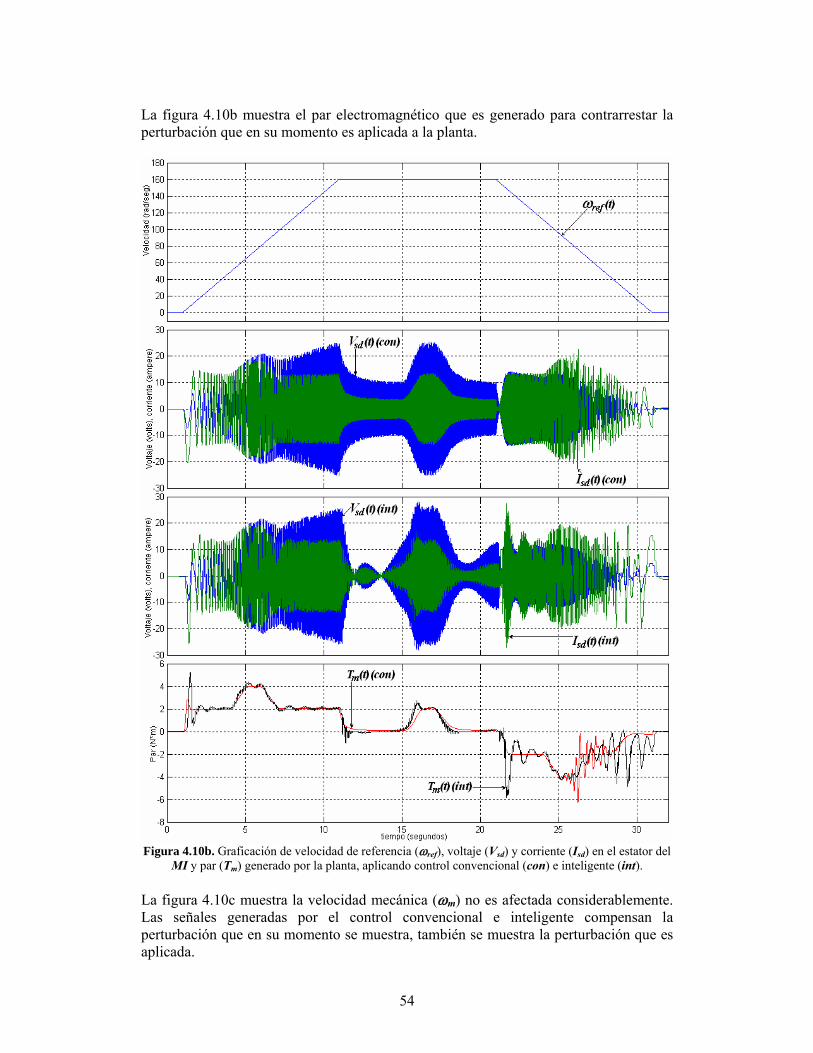
54
La figura 4.10b muestra el par electromagnético que es generado para contrarrestar la perturbación que en su momento es aplicada a la planta.
Figura 4.10b. Graficación de velocidad de referencia (ωref), voltaje (Vsd) y corriente (Isd) en el estator del
MI y par (Tm) generado por la planta, aplicando control convencional (con) e inteligente (int). La figura 4.10c muestra la velocidad mecánica (ωm) no es afectada considerablemente. Las señales generadas por el control convencional e inteligente compensan la perturbación que en su momento se muestra, también se muestra la perturbación que es aplicada.

55
Sin embargo, sí la perturbación es mayor al par generado por el motor, entonces el sistema no podrá hacer seguimiento de la referencia controladamente y mucho menos compensar la perturbación.
Figura 4.10c. Graficación de velocidad de referencia (ωref), velocidad mecánica (ωm) generada por la
planta, aceleración (dωm), la potencia de entrada (Pe) y potencia de salida (Ps), aplicando control convencional (con) e inteligente (int).

56
La figura 4.10c muestra el comportamiento de la potencia de entrada (Pe) y potencia de salida (Ps) en todo el trayecto de prueba. Conclusiones de la prueba de perturbación:
• Ambos controles generan la señal de control necesarias para disminuir el error entre la velocidad de referencia (ωref) y la velocidad mecánica (ωm) de la planta durante la aceleración y velocidad constante como se muestra en la figura 4.10c.
• La planta producirá el par electromagnético (Tm) resultado de las señales de
control necesaria para compensar la perturbación que en su momento es aplicada, como se muestra en la figura 4.10b.
• En el momento de la desaceleración, ambos controles muestran cierta
desestabilización después de que es aplicada la perturbación, como se muestra en la figura 4.10c.
4.2.4. Simulación ampliada sin perturbación Por último se cambia la velocidad de referencia (ωref) para observar el comportamiento de la planta ante diferentes pendientes durante las aceleraciones, desaceleraciones y sin perturbaciones durante el trayecto. En las figuras 11a, 11b, y 11c muestran el comportamiento de la planta y las señales de control que son aplicadas a la planta, para que siga la señal de referencia. Cuando la pendiente de la desaceleración es demasiado pronunciada las señales de control generadas provocarán que el MI salga de su rango nominal de operación, esto se muestra en la figura 11b. Por lo tanto es necesario considerar los límites y desempeño real del motor que será utilizado en la aplicación. La Figura 11a muestra que el freno mecánico es aplicado a la planta solo en velocidad descendente y cumple las tres condiciones que son:
0 0 0ref ed dt P errorω < ∧ > ∧ < .
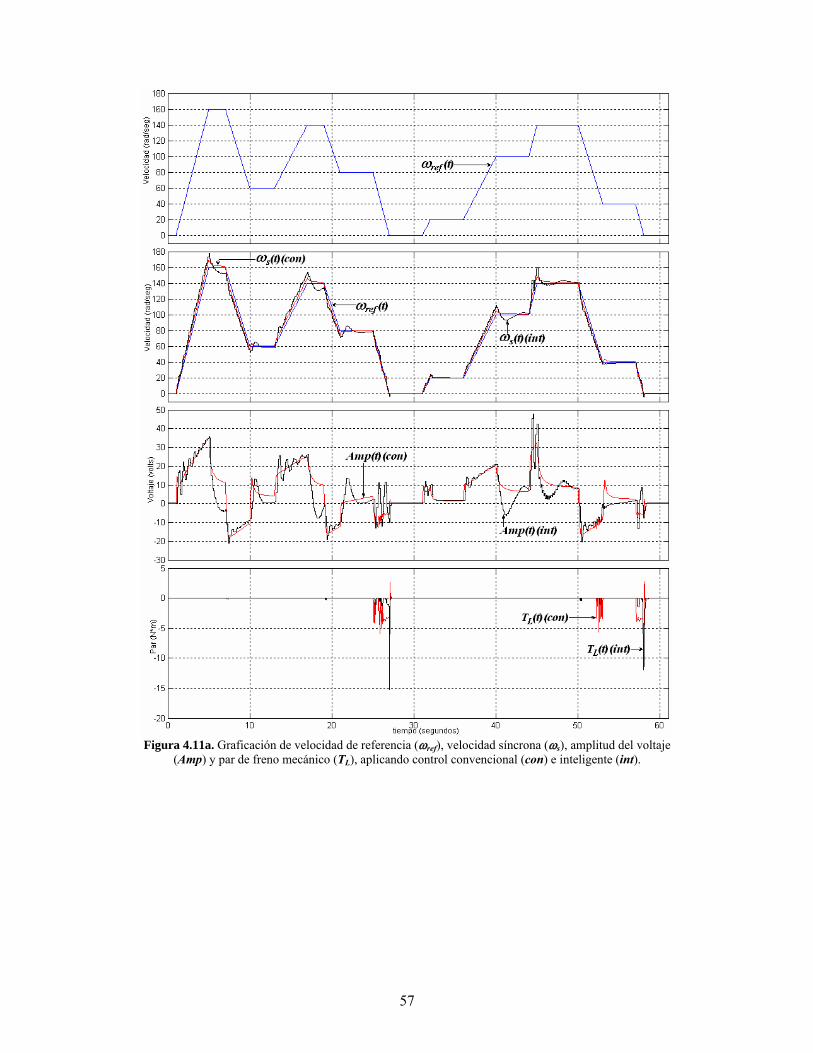
57
Figura 4.11a. Graficación de velocidad de referencia (ωref), velocidad síncrona (ωs), amplitud del voltaje
(Amp) y par de freno mecánico (TL), aplicando control convencional (con) e inteligente (int).

58
Figura 4.11b. Graficación de velocidad de referencia (ωref), voltaje (Vsd) y corriente (Isd) en el estator del
MI y par (Tm) generado por la planta, aplicando control convencional (con) e inteligente (int). La figura 4.11c muestra el comportamiento de la potencia de entrada Pe y la potencia de salida Ps durante el trayecto de la simulación. Durante la aceleración la potencia es positiva, la velocidad síncrona es mayor a la velocidad mecánica y durante la desaceleración la potencia es negativa, la velocidad síncrona es menor a la velocidad mecánica.
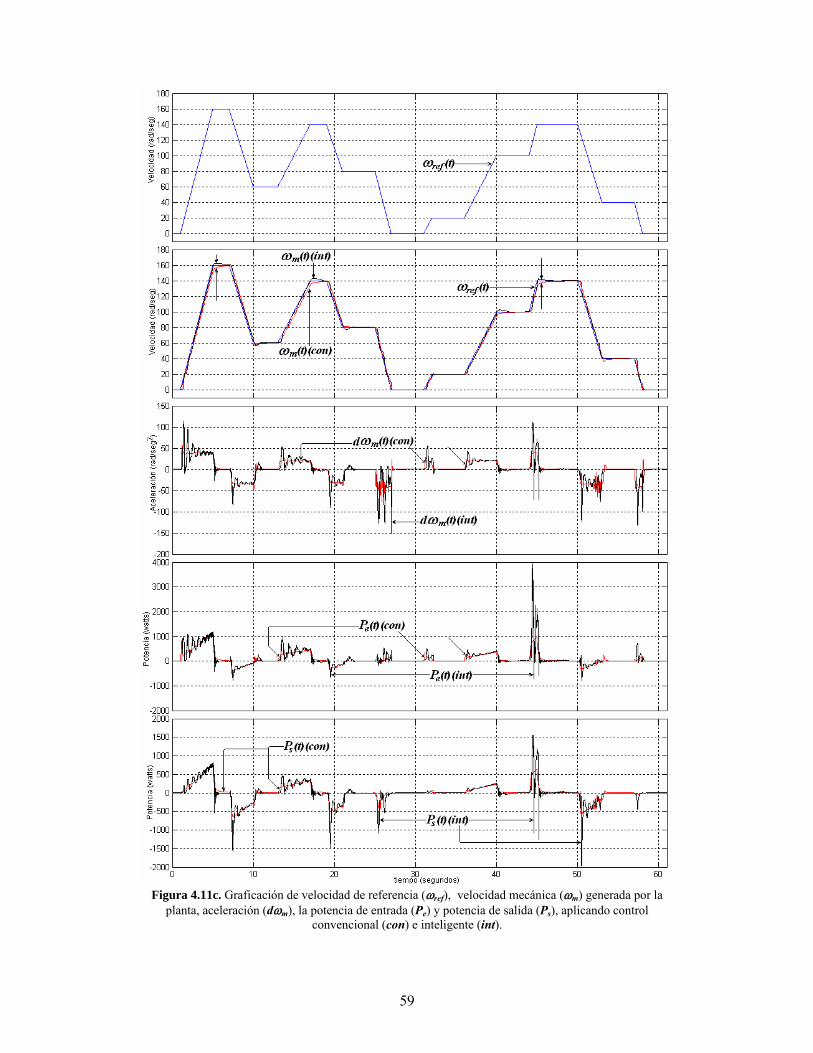
59
Figura 4.11c. Graficación de velocidad de referencia (ωref), velocidad mecánica (ωm) generada por la
planta, aceleración (dωm), la potencia de entrada (Pe) y potencia de salida (Ps), aplicando control convencional (con) e inteligente (int).

60
4.5. ANÁLISIS DE RESULTADOS DE SIMULACIÓN • En la figura 4.7 se muestran las variables o datos de entrenamiento para los cuales fue
sintonizado el control inteligente. Es importante mencionar que estos datos han sido seleccionados de manera que comprendan todo el rango de operación de la planta.
• En las figuras 4.8c, 4.10c y 4.11c, observamos que la planta que esta controlado por el
control inteligente, es mejor en el seguimiento de la señal de referencia en velocidades ascendentes y velocidad constante, en comparación al sistema controlado por el control convencional.
• Las figuras 4.8a. 4.10a y 4.11a, muestran las señales de control (ωs, Amp y TL)
producidas por los controles convencional e inteligente. Notamos que el control inteligente en las desaceleraciones, hace el mayor esfuerzo, en comparación al control convencional.
• Las figuras 4.8c, 4.10c, y 4.11c muestran el comportamiento de la potencia de entrada
(Pe) y salida (Ps) para ambos controladores. En todas ellas se observa que la potencia es negativa durante las desaceleraciones, indicando que el MI esta en modo generador. Sin embargo en la figura 4.10c observamos que la planta tiene oscilaciones entre modo motor y modo generador, después de haberse aplicado una perturbación a la planta.
• Con relación a la potencia mecánica ó salida se observa que durante la desaceleración,
la potencia mecánica es mayor que la potencia eléctrica, indicativo de las considerables pérdidas de la planta, como se muestran en las figuras 4.8c., 4.10c., y 4.11c.
• Ambos controles tanto convencional como inteligente logran que la planta siga la
velocidad de referencia (ωref) preestablecida, ante perturbaciones en la aceleración de la planta.
• El freno mecánico (TL), sólo es accionado durante la desaceleración, como se muestra
en las figuras 4.8a, 4.10a y 11a, como consecuencia hay una disminución del voltaje y corriente en estator.
• El freno mecánico (TL) controlado por control convencional es mejor al que es
controlado por control inteligente, la causa por la cual sucede es debido a que los datos de entrenamiento tienen poca información de la aplicación del freno mecánico, como se muestra en las figuras 4.7.
• La regeneración de energía es limitada por las pérdidas que hay en los devanados del
MI, como se muestra en la figura 4.9a. En el anexo 8 se muestran las gráficas de energía a diferentes pendientes de desaceleración.
• Se mostró que, con los parámetros tomados de la tesis de Nandayapa y Hernández
[56], la mayor pérdida de energía es en los devanados del MI, por lo que es necesario utilizar un motor de inducción más eficiente para este tipo de aplicación.

61
Capítulo 5 CONCLUSIONES
Se implementó el modelado de un sistema de propulsión eléctrica con regeneración de energía incluyendo sistema mecánico. Esto se simuló para comparar las estrategias de control convencional (PI) e inteligente (NHTE). Se muestran las conclusiones por cada objetivo propuesto.
• Se desarrolla un modelo matemático aproximado del motor/generador. El MI tiene tres modos de operación: motor, generador y freno. El modelo del MI implementado en Matlab/Simulink® cumple las características de operación de este tipo de motor. El funcionamiento del modelo analítico del sistema electromecánico del MI se valida en los modos motor, generador y frenado. Dicho modelo considera la fricción constante en las chumaceras y no considera vibraciones, variaciones del medio ambiente ó pérdidas de fricción dinámicas.
• Modelo del sistema mecánico emulando la masa del vehículo.
El modelo del sistema mecánico ha sido implementado considerando un volante de inercia, un disco de freno y la flecha. Esto emula la masa inercial total de un vehículo dado. Dicho modelo es implementado en Matlab/Simulink®. Los elementos del sistema se consideran rígidos, el modelo permite emular el frenado disipativo. Se aplica el par de freno mecánico (TL), sin pérdidas en la transmisión. Sin embargo el sistema mecánico no contempla el desgaste por fricción, vibraciones, etc.
• El modelo integral del sistema electromecánico ha sido validado y se comparó
con resultados presentados en la literatura.
Se verificó la operación del MI en modo frenado regenerativo durante la desaceleración. Esto ocurre donde la velocidad síncrona (ωs) es menor a la velocidad mecánica (ωm), y la potencia de entrada (Pe) se hace negativa. El modelo del motor MI muestra limitaciones para ser operado ante las perturbaciones de par empleadas, por lo que sería necesario un MI más robusto.
• El objetivo de control es seguir una señal de referencia de velocidad, usando modos motor y generador de una máquina de inducción acoplada a un volante de inercia. Se usaron los datos para diseñar un control difuso en NHTE en Matlab/Simulink®. La implantación del control inteligente permite concluir:

62
El control inteligente basado en la estrategia NHTE pudo ser implementado para dos entradas y tres salidas. Se comprobó que alcanza el objetivo de control en cada intervalo de muestreo, con buena aproximación. Se propuso y se ensayó la actualización de dicho control a intervalos 10 y 100 veces menores que el intervalo de sintonización, comprobándose su correcto funcionamiento. El control inteligente utiliza mayor esfuerzo de control que el control convencional, lo cual resulta en menor error en el seguimiento de la referencia.
• Adicionalmente, el trabajo se ha justificado porque:
i) contribuye a la línea de conversión de energía al desarrollar los detalles del frenado regenerativo, ii) contribuye a la línea de control inteligente, porque se probó la metodología NHTE sintonizado con ANFIS®, diferente a NOMURA y en un caso MIMO, iii) contribuye al desarrollo de estrategias más eficientes de ahorro de energía en situaciones con objetivos de control diferentes al ahorro de energía.
TRABAJOS FUTUROS Para una mejor representación del comportamiento no lineal del MI se propone incluir dicho efecto en un modelo mejorado. Para una buena representación de la dinámica del freno mecánico, es necesario cambiar de modelo, la limitante es conseguir el valor de todos los parámetros involucrados para una simulación más precisa. Para materializar el ahorro de energía, es necesario proponer y probar esquemas de almacenamiento de la energía regenerada. LOGROS Artículo publicado y presentado en el Congreso de Ingeniería Eléctrica 2005 (cie2005) desarrollado del 7-9 de septiembre de 2005 en la ciudad de México, D.F.

63
ANEXO 1 SISTEMA ELÉCTRICO El anexo reúne los desarrollos analíticos de los modelos eléctrico y mecánico usados en la simulación. A1.1. Determinación de las inductancias de la máquina de inducción
Las inductancias mencionadas en el capítulo 2, sección 2.1.2.1, pueden ser obtenidas de la siguiente manera [28].
La inductancia magnética del devanado sa del estator es expresado:
⎟⎠⎞
⎜⎝⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=
42 πμ
grlNL soam (A1.1)
Ns = número de vueltas del devanado del estator, µo = permeabilidad en el entrehierro, r = radio a la mitad del entrehierro, l = longitud axial del entrehierro, g = longitud uniforme del entrehierro.
Por lo tanto, la inductancia total del devanado sa puede expresarse como: amslsa LLL += (A1.2)
donde Lsa Inductancia del devanado del estator sa. Lsl Inductancia de dispersión de los devanados del estator.
Puesto que los devanados sb y sc son iguales al devanado sa, está claro que las inductancias magnéticas son Lam=Lbm=Lcm, entonces haciendo un cambio de variable Lam=Lsm, obtenemos las siguientes ecuaciones:
bmslsb LLL += (A1.3)
cmslsc LLL += (A1.4) Entonces
sa sb sc sl smL L L L L= = = + (A1.5) La inductancia mutua entre los devanados sa y sb, sb y sc, y sc y sa se derivan de [28]:
⎟⎠⎞
⎜⎝⎛−===
82 πμ
grlNLLL soscasbcsab (A1.6)
o, en términos de la ecuación (A1.1)
2 2am sm
sab sbc sacL LL L L= = = − = − (A1.7)
Los acoplamientos de flujo magnético entre los devanados sa, sb, y sc, son
resultado de las corrientes que fluyen en los devanados del estator, a continuación se

64
expresa en forma matricial. Se sustituyen las ecuaciones (A1.5), (A1.6), (A1.7), en la ecuación (2.7) [28]:
( ) sabc
smslsmsm
smsmsl
sm
smsmsmsl
ssabc i
LLLL
LLLL
LLLL
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−
−+−
−−+
=
22
22
22λ (A1.8)
En la figura A1.1. se muestran los devanados del estator sb y sc están desplazadas
simétricamente del devanado sa por ± 120º, igualmente para las devanados del rotor, donde θr es la posición angular del rotor con respecto al estator.
Figura A1.1. Ejes magnéticos de una máquina de inducción de tres fases
Refiriéndonos a la figura A1.1 podemos ver que el devanado del rotor ra es
desplazada a partir del devanado del estator sa por el ángulo θr. Similarmente, los devanados del rotor rb y rc son desplazados a partir de los devanados del estator sb y sc respectivamente por θr. Por lo tanto, las inductancias mutuas correspondientes son [28]:
, , , 0 cos cos4
rsa ra sb rb sc rc s r r sm r
s
NrlL L L N N Lg N
πμ θ θ⎛ ⎞= = = =⎜ ⎟⎝ ⎠
(A1.9)
Y el ángulo entre los devanados sa y rb es θr + 2π/3 (figura A1.1), de modo que
⎟⎠⎞
⎜⎝⎛ +===
32cos,,,πθrsm
s
rrascrcsbrbsa L
NNLLL (A1.10)
Finalmente, el devanado del estator sa es desplazado a partir del devanado del
rotor rc por el ángulo θr - 2π/3 (figura A1.1.). Por lo tanto:
⎟⎠⎞
⎜⎝⎛ −===
32cos,,,πθrsm
s
rrbscrasbrcsa L
NNLLL (A1.11)
Las inductancias antes mencionadas se pueden utilizar para establecer el flujo
magnético que acopla los devanados del estator debido a las corrientes en los devanados del rotor. En forma de matriz se sustituyen las ecuaciones (A1.9), (A1.10), (A1.11), en la ecuación (2.8):

65
( )
( ) ( )( ) ( )( ) ( ) ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−++−−+
=
rc
rb
ra
rrr
rrr
rrr
sms
rrsabc
iii
LNN
θθθθθθθθθ
λππ
ππ
ππ
coscoscoscoscoscoscoscoscos
32
32
32
32
32
32
(A1.12)
El flujo magnético total que acopla los devanados del estator es la suma de la contribución de los circuitos del estator y rotor, ecuaciones (A1.8) y (A1.12),
( ) ( )rsabcssabcsabc λλλ += (A1.13)
Para determinar los acoplamientos del flujo del rotor, en términos de cantidades previamente definidas, el flujo que relaciona los circuitos del rotor debido a las corrientes del rotor es:
( )
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+−−
−+−
−−+
=
rc
rb
ra
smNN
rlsmNN
smNN
smNN
smNN
rlsmNN
smNN
smNN
smNN
rl
rrabc
iii
LLLL
LLLL
LLLL
s
r
s
r
s
r
s
r
s
r
s
r
s
r
s
r
s
r
22212
21
22122
21
2212
212
λ (A1.14)
donde Lrl es la inductancia de dispersión del devanado del rotor. El flujo que relaciona las bobinas del rotor debido a las corrientes en los circuitos del estator es:
( )
( ) ( )( ) ( )( ) ( ) ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−−++−
=
sc
sb
sa
rrr
rrr
rrr
sms
rsrabc
iii
LNN
θθθθθθθθθ
λππ
ππ
ππ
coscoscoscoscoscoscoscoscos
32
32
32
32
32
32
(A1.15)
Se observa que la matriz de la ecuación (A1.15) es la transpuesta de la ecuación (A1.12) [9, 12].
De los acoplamientos totales del flujo de las bobinas del rotor es otra vez la suma de los dos componentes definidos por las ecuaciones (A1.14) y (A1.15), es decir,
( ) ( )srabcrrabcrabc λλλ += (A1.16) A1.2. Ecuaciones del MI El MI con rotor jaula de ardilla en el marco de referencia fijo al estator. Las ecuaciones para el estator [28]:
sdsd s sd sq
dV R idtλ ωλ= + − (A1.17)
sqsq s sq sd
dV R i
dtλ
ωλ= + + (A1.18)
00 0
ss s s
dV R idtλ
= + (A1.19)
donde el flujo magnético en el estator:
( )sd sl sd m sd rdL i L i iλ = + + (A1.20)
( )sq sl sq m sq rqL i L i iλ = + + (A1.21)
0 0s sl sL iλ = (A1.22) Las ecuaciones para el rotor:

66
( )rdrd r rd r rq
dV R idtλ ω ω λ= + − − (A1.23)
( )rqrq r rq r rd
dV R i
dtλ
ω ω λ= + + − (A1.24)
00 0
rr r r
dV R idtλ
= + (A1.25)
donde el flujo magnético en el rotor:
( )rd rl rd m sd rdL i L i iλ = + + (A1.26)
( )rq rl rq m sq rqL i L i iλ = + + (A1.27)
0ro rl rL iλ = (A1.28) donde s sl mL L L= + ; r rl mL L L= + Rs, Rr : resistencias de estator y rotor respectivamente, Lls, Llr : inductancias de dispersión de los devanados de estator y rotor respectivamente. Lm : inductancia mutua. isd, isq , is0 : corrientes en el marco dq0 del estator, ird, irq, ir0 : corrientes en el marco dq0 del rotor, Vsd, Vsq , Vs0 : voltajes aplicados a los devanados dq0 del estator, Vrd, Vrq , Vr0 : voltajes aplicados a los devanados dq0 del rotor, ω : velocidad (eléctrica) en el estator, p : número de pares de polos, ωr : velocidad angular del rotor.
Realizando operaciones matemáticas para la ecuación (A1.17) a la ecuación (A1.28), del MI:
Se sustituyen las ecuaciones (A1.21) y la derivada de la ecuación (A1.20), en la ecuación (A1.17):
sdsd s sd sq
dV R idtλ ωλ= + −
sd rdsd s sd s m s sq m rq
di diV R i L L L i L idt dt
ω⎡ ⎤ ⎡ ⎤= + + − +⎣ ⎦⎢ ⎥⎣ ⎦
§ ( )d dsd s s sd s sq m rd m rqdt dtV R L i L i L i L iω ω= + − + − (A1.17a)
Se sustituyen las ecuaciones (A1.20) y la derivada de la ecuación (A1.21), en la ecuación (A1.18):
sqsq s sq sd
dV R i
dtλ
ωλ= + +
[ ]sq rqsq s sq s m s sd m rd
di diV R i L L L i L i
dt dtω
⎡ ⎤= + + + +⎢ ⎥
⎣ ⎦
§ ( )d dsq s sd s s sq m rd m rqdt dtV L i R L i L i L iω ω= + + + + (A1.18a)
Se sustituye la derivada de la ecuación (A1.22) en la ecuación (A1.19):

67
00 0
ss s s
dV R idtλ
= +
00 0
ss s s sl
diV R i Ldt
= +
§ ( )0 0d
s s sl sdtV R L i= + (A1.19a) Se sustituyen las ecuaciones (A1.27) y la derivada de la ecuación (A1.26), en la ecuación (A1.23):
( )rdrd r rd r rq
dV R idtλ ω ω λ= + − −
( )rd sdrd r rd r m r r rq m sq
di diV R i L L L i L idt dt
ω ω⎡ ⎤ ⎡ ⎤= + + − − +⎣ ⎦⎢ ⎥⎣ ⎦
§ ( ) ( ) ( )d drd m sd r m sq r r rd r r rqdt dtV L i L i R L i L iω ω ω ω= − − + + − − (A1.23a)
Se sustituyen las ecuaciones (A1.26) y la derivada de la ecuación (A1.27), en la ecuación (A1.24):
( )rqrq r rq r rd
dV R i
dtλ
ω ω λ= + + −
( )[ ]rq sqrq r rq r m r r rd m sd
di diV R i L L L i L i
dt dtω ω
⎡ ⎤= + + + − +⎢ ⎥
⎣ ⎦
§ ( ) ( ) ( )d drq r m sd m sq r r rd r r rqdt dtV L i L i L i R L iω ω ω ω= − + + − + + (A1.24a)
Se sustituye la derivada de la ecuación (A1.28) en la ecuación (A1.25)
00 0
rr r r
dV R idtλ
= +
00 0
rr r r sl
diV R i Ldt
= +
§ ( )0 0d
r r rl rdtV R L i= + (A1.25a) En representación matricial [9, 12] las ecuaciones (A1.17a), (A1.18a), (A1.19a), (A1.23a), (A1.24a) y (A1.25a):
( ) ( )( ) ( )
0 0
0
0 00 0
0 0 0 0 00 00 0
0 0 0 0 0
d dsd sds s s m mdt dt
d dsq sqs s s m mdt dt
ds ss sl dt
d drd rdm r m r r r rdt dt
d drq r m m r r r rdt dt
dr rl dtr
V iR L L L LV iL R L L LV iR LV iL L R L LV iL L L R L
R LV
ω ωω ω
ω ω ω ωω ω ω ω
⎡ ⎤ + − −⎡ ⎤⎢ ⎥ ⎢ ⎥+⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥+
=⎢ ⎥ ⎢ ⎥− − + − −⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥− − +⎢ ⎥ ⎢ ⎥
+⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦ 0
rq
ri
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(A1.29) El modelo ‘dq0’ del motor de inducción (MI)con rotor de jaula de ardilla,
referida al estator (Tabla 2.1) donde ω = 0.

68
0 0
0 0
0 0 0 00 0 0 00 0 0 0 0
0 00 0
0 0 0 0 0
d dsd sds s mdt dt
d dsq sqs s mdt dt
ds ss sl dt
d drd rdm r m r r r rdt dt
d drq rqr m m r r r rdt dt
dr rl dtr r
V iR L LV iR L LV iR LV iL L R L LV iL L L R L
R LV i
ω ωω ω
⎡ ⎤ ⎡ ⎤+⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥+⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥+
=⎢ ⎥ ⎢⎢ ⎥+⎢ ⎥ ⎢⎢ ⎥
⎢ ⎥ ⎢⎢ ⎥− − +⎢ ⎥ ⎢⎢ ⎥
+⎢ ⎥⎢ ⎥ ⎢⎣ ⎦⎣ ⎦ ⎣ ⎦
⎥⎥⎥⎥⎥⎥⎥
(A1.29a) Los voltajes en el rotor son: Vrd = Vrq = Vr0 = 0.
En representación de variables de estado la ecuación (A1.29a) son: 1sd rd
sd s sd ms
di diV R i Ldt L dt
⎡ ⎤= − −⎢ ⎥⎣ ⎦ (A1.17b),
1sq rqsq s sq m
s
di diV R i L
dt L dt⎡ ⎤
= − −⎢ ⎥⎣ ⎦
(A1.18b),
[ ]00 0
1ss s s
sl
di V R idt L
= − (A1.19b)
1rd sdr rd r r rq m r sq m
r
di diR i L i L i Ldt L dt
ω ω⎡ ⎤= − − − −⎢ ⎥⎣ ⎦ (A1.23b)
1rq sqr rq r r rd m r sd m
r
di diR i L i L i L
dt L dtω ω
⎡ ⎤= − + + −⎢ ⎥
⎣ ⎦ (A1.24b)
[ ]00
1rs r
rl
di R idt L
= − (A1.25b)
A1.3. Excitación trifásica para el modelo del MI
La excitación para el modelo del MI se obtiene a partir de la excitación trifásica proporcionada al motor, mediante las siguientes ecuaciones: Las variables Vsd, Vsq y Vso son generadas por [22, 28, 31, 41]:
3sc sb
sdV VV −
= (A1.30)
( )23
sa sb scsq
V V VV
− −= (A1.31)
0 3sa sb sc
sV V VV + +
= (A1.32)
donde Vsa, Vsb y Vsc son la excitación trifásica 3φ:
( )( )cossa eV Amp tθ= (A1.33)
( )( ) ( )( )( )cos 3
2e e
sb
Amp t sen tV
θ θ− −= (A1.34)
( )( ) ( )( )( )3 cos
2e e
sc
Amp sen t tV
θ θ−= (A1.35)
Las funciones cos(θe(t)) y sen(θe(t)) son determinadas de la siguiente manera.
( )( ) ( ) ( )( )( )00cos sen
t
e s et t t dtθ ω θ= ∫ ó ( )( ) ( )( )( )0cos cos
t
e st t dtθ ω= ∫ (A1.36)

69
( )( ) ( ) ( )( )00sen cos
t
e s et t t dtθ ω θ= −∫ ó ( )( ) ( )( )( )0sen
t
e st sen t dtθ ω= −∫ (A1.37)
donde la relación de trigonometría entre seno y coseno:
cos sen2e eπθ θ⎛ ⎞+ = −⎜ ⎟
⎝ ⎠; cos
2e esen πθ θ⎛ ⎞+ =⎜ ⎟⎝ ⎠
(A1.38)
Por lo tanto las variables amplitud del voltaje (Amp) y velocidad síncrona (ωs), serán generadas por el control.

71
ANEXO 2 SISTEMA MECÁNICO A2.1. Cantidad de movimiento.
Definimos ahora, a partir de las ecuaciones de Newton [capítulo 2, sección 2.3.1], la cantidad de movimiento de una partícula. El vector de aceleración se define previamente como [4, 34, 35]:
dtdva = (A2.1)
Por ello, la segunda ley de Newton puede escribirse alternativamente como:
dtdvmF =∑ (A2.2)
Si conjeturamos que la partícula es de masa constante, podemos escribir:
( )dtmvdF =∑ (A2.3)
Donde la cantidad mv se define como la cantidad de movimiento lineal de la partícula. A2.1.1. Ecuaciones de movimiento.
La segunda ley de Newton es una igualdad vectorial. Es posible convertir dicha ecuación en tantas ecuaciones escalares como dimensiones tenga el dominio de análisis. Vemos que un vector es equivalente a la suma vectorial de sus componentes en los ejes de coordenadas. Luego, para el espacio tridimensional en coordenadas cartesianas podemos escribir [4, 34, 35]:
( )kajaiamkFjFiF zyxzyxˆˆˆˆˆˆ ++=++ ∑∑∑ (A2.4)
De la ecuación anterior se desprenden tres ecuaciones escalares equivalentes:
xxmaF =∑ (A2.5)
yymaF =∑ (A2.6)
zzmaF =∑ (A2.7)
A2.1.2. Equilibrio dinámico.
Conseguimos apreciar que la cantidad vectorial ma en la ecuación de la segunda ley de Newton tiene dimensiones de fuerza. Por ello, a esta cantidad se le conoce también como fuerza de inercia (FI). Entonces
maFI = (A2.8) Sustituyendo la ecuación (A2.8) en la segunda ley de Newton, podemos escribir: ∑ = Iext FF (A2.9) Algebraicamente, también conseguimos escribir la ecuación (A2.9) como: ∑ =− 0Iext FF (A2.10)

72
Podemos considerar el resultado de la manipulación algebraica efectuada para obtener (A2.9) de (A2.10) como la transformación de un problema dinámico a uno estático equivalente. Esto permite analizar problemas dinámicos usando los métodos vectoriales de estática. A2.2. Cinemática de cuerpos rígidos
La cinemática de cuerpos rígidos es un caso particular de la cinemática de sistemas de partículas. Estas últimas, al pertenecer a un cuerpo rígido, adquieren propiedades especiales que es de importancia considerar.
Si bien es cierto que el volumen de cuerpo rígido se deforma bajo el efecto de fuerzas externas, estas deformaciones son, varios órdenes de magnitud, menores que las dimensiones características del sólido. Por ello, en la medición de desplazamientos, velocidades y aceleraciones, podemos despreciar estas deformaciones volumétricas sin introducir errores perceptibles. Para el tipo de análisis dinámico que habremos de analizar se considera a los cuerpos rígidos como cuerpos indeformables, de modo que la distancia entre dos puntos pertenecientes a él se mantiene constante en magnitud durante todo momento.
El estudio de la dinámica de cuerpos rígidos comienza con el estudio del movimiento de dichos cuerpos en el plano. Existen varias razones para ello. Sin duda la introducción de los conceptos fundamentales es más fácil cuando se evita la complejidad adicional inherente al movimiento tridimensional. También existe una razón de orden práctico, puesto que una proporción importante, y quizás mayoritaria, de las máquinas de producción tienen su movimiento contenido en un plano o su funcionamiento puede ser explicado en movimientos planos independientes. Por lo tanto los sistemas mecánicos pueden clasificarse en tres categorías basadas en la naturaleza del movimiento.
1. Sistemas Translacionales: estos son sistemas mecánicos en los cuales el movimiento es a lo largo de una línea recta.
2. Sistemas Rotacionales: estos son sistemas mecánicos en los cuales el movimiento es circular, en donde se mueven sus partes en relación a un eje fijo.
3. Sistemas Translacionales y Rotacionales: Son sistemas en los cuales simultáneamente se tienen movimientos translacionales y rotacionales.
A2.2.1. Sistema rotacional mecánico. Leyes Básicas. Las ecuaciones dinámicas de los sistemas rotacionales mecánicos pueden encontrarse por la aplicación de la segunda ley de Newton. Para sistemas rotacionales, la ecuación se modifica como sigue:
( )2
21
N
ii
dJ T tdtα
=
=∑ (A2.11)
Actuando en la dirección α, donde J es el momento de inercia de la masa rotacional y α es el desplazamiento angular. El término N es el número total de pares componentes (ya sean pares externos e internos de reacción).
( )2
21
0N
ii
dT t Jdtα
=
− =∑ (A2.12)

73
Por lo tanto los elementos activos son el par y la velocidad angular. Los elementos pasivos son el momento de inercia, la rigidez del resorte torsional y la fricción de los amortiguadores rotatorios.
Momento de Inercia J. Este elemento presentado en la figura A2.1a., es la relación entre el momento de inercia y el par aplicado, el cual está dada por:
Figura A2.1a. Representación simbólica del momento de inercias
( )2
02
ddT t J Jdt dt
ωα= = (A2.13)
Por lo tanto ( )01 T t dtJ
ω = ∫
En donde T(t) es el par, α el desplazamiento angular de la posición de referencia, ω0 es la velocidad angular y J es el momento de inercia respecto a un eje fijo. La ecuación (A2.13) se basa en la segunda ley de Newton.
Resorte Torsional. Si ambos extremos del resorte están libres para moverse y los desplazamientos angulares son α1(t) y α2(t), como se muestra en la figura A2.1b., entonces para pequeños cambios en el desplazamiento, la relación entre el par aplicado y el cambio en el desplazamiento esta dado por:
Figura A2.1b. Representación simbólica del resorte torsional
( ) ( ) ( )1 2 1 2T t K K dtα α ω ω= − = −∫ (A2.14)
Por lo tanto ( )1 2
1 dT tK dt
ω ω− =
Donde K es la rigidez del resorte, ω1 y ω2 las velocidades a los extremos del elemento. En la práctica, un resorte torsional no puede ser identificado físicamente como tal, pero puede representar una flecha o eje, él cual no es perfectamente rígida.
Amortiguador Rotacional. En sistemas rotacionales, la fricción ocurre entre flechas rotatorias y las chumaceras que las soportan. Donde las chumaceras son lubricadas con un fluido viscoso, y la energía se disipa en forma de calor. Es conveniente representar al elemento friccionante en un sistema rotatorio con un amortiguador rotacional (Amortiguador rotatorio), como se muestra en la figura A2.1c. El par necesario para girar la flecha contra la oposición del fluido viscoso está dado por:

74
Figura A2.1c. Representación simbólica del amortiguador rotatorio
( ) ( )1 21 2
d dT t B Bdt dtα α ω ω⎛ ⎞= − = −⎜ ⎟
⎝ ⎠ (A2.15)
Por lo tanto ( )1 2
T tB
ω ω− =
donde α1 y α2 son los desplazamientos angulares de la flecha y la caja, respectivamente, de acuerdo a alguna posición de referencia. La constante de proporcionalidad B se llama coeficiente de fricción o coeficiente de amortiguamiento. A2.2.2. Relaciones de Energía de Elementos Rotacionales Mecánicos. Momento de inercia J. La energía cinética almacenada está dada por la expresión
( )0KEW T t dα
α= ∫ (A2.16)
Sustituyendo T(t) de la ecuación (A2.13) y reemplazando α bajo el signo de integración por una variable sugerida θ para evitar confusión entre la variable de integración y el limite α, obtenemos:
22
20
12KE
d dW J Jdt dt
α θ α⎛ ⎞= = ⎜ ⎟⎝ ⎠∫ (A2.17)
Esta energía está almacenada en la masa. La unidad de energía en el sistema mks es en joule y en sistema inglés es pie-libra. Resorte Torsional K. Un resorte torsional o flecha, almacena energía potencial cuando se flexiona de su posición normal relajada. Esta energía esta dada por
0PEW Tdα
α= ∫ (A2.18)
Sustituyendo T(t) en la ecuación (A2.14) y remplazando α1- α2 por α, obtenemos
2120PEW K d K
αθ θ α= =∫ (A2.19)
Coeficiente de Fricción B. La energía disipada en B está dada por
0BW Tdα
α= ∫ (A2.20)
Sustituyendo T(t) de la ecuación (A2.15) y remplazando α1- α2 por α, obtenemos
2
0 0
ot
Bd dW B d B dtdt dt
α θ αθ ⎛ ⎞= = ⎜ ⎟⎝ ⎠∫ ∫ (A2.21)

75
Donde to es el tiempo tomado por la flecha del amortiguador rotatorio para girar un ángulo α relativo a su caja.
0
ot
B BW P dt= ∫ (A2.22)
Donde PB es la potencia (energía por segundo) disipada en el amortiguador. Por consiguiente, de la ecuaciones (A2.21) y (A2.22)
2
BdP Bdtα⎛ ⎞= ⎜ ⎟
⎝ ⎠ (A2.23)
A2.3. Representación mecánica del MI.
La primera ley de Newton [4, 15, 10, 25, 27, 29, 34, 35, 37, 40], establece que toda partícula sometida por fuerzas externas (Fext) en cualquier dirección debe ser igual a cero ó la suma total de par externo (Mext) respecto a cualquier eje también debe de ser igual a cero, por tanto deben de satisfacer: ∑ = 0extF ó 0extM =∑ (A2.24)
Utilizando el par electromagnético (Te), el par de carga (T0) al MI, coeficiente de fricción (B) y el momento de inercia del rotor (J), para la representación mecánica del MI. El par externo del sistema es:
0 0ext eM T T= − =∑ (A2.25) Donde el par Te esta definido por la ecuación (2.31). El par interno del sistema es:
int 0M =∑
0rjr br r
dT T J Bdtω ω+ = + =∑ (A2.26)
donde Tbr: Par aplicado a la chumacera debido al rotor. Tjr: Par aplicado al rotor. Igualando las ecuaciones (A2.25) y (A2.26) se obtiene:
0e jr brT T T T− = +∑ ∑
0 0r r
e r e rd dT T J B T J B Tdt dtω ωω ω− = + ⇒ = + +
Entonces la aceleración (dωr/dt) del rotor está definida como:
( )01r
e rd T B Tdt Jω ω= − − (A2.27)

76
A2.4. Análisis del sistema mecánico. Aplicando la segunda ley de Newton [4, 34, 35] al sistema mecánico
representado esquemáticamente en la figura A2.2a. Donde las dos masas rotatorias con momentos de inercia J0 (Inercia del volante) y J1 (disco de frenos), acopladas por una flecha.
El coeficiente de fricción se considera constante en todo tiempo. Por lo tanto cada chumacera tiene un coeficiente de fricción de Bi/2, de tal manera que el coeficiente de fricción debido al volante de inercia es B0 y por el disco de freno es B1. También es aplicado un par T0 al volante de inercia y un par TL de freno mecánico al disco de freno.
Figura A2.2a. Representación esquemática del sistema mecánico
(volante de inercia, disco de frenos, chumaceras y flecha). Para el volante de inercia, TL = 0: El par externa aplicado al sistema es:
0 0extM T= =∑ (A2.28) El par interno del sistema es:
( )2
0 0int 0 0 0 0 12 0jv bv f
d dM T T T J B Kdt dtα α α α= + + = + + − =∑ (A2.29)
donde Tbv Par aplicado a la chumacera debido al volante de inercia. Tf Par aplicado a la flecha. Tjv Par aplicado al volante de inercia. Igualando las ecuaciones (A2.28) y (A2.29) se obtiene:
intextM M=∑ ∑ ⇒ ( )1000
020
2
00 αααα−++= K
dtdB
dtdJT (A2.30)
Para el disco de freno mecánico T0 = 0: El par externo del sistema:
0ext LM T= =∑ (A2.31) El par interno del sistema:
( )1int 1 1 1 1 1 0 0jd bd f
dM T T T J B Kdtα α α α= + + = + + − =∑ (A2.32)
donde Tbd Par aplicado a la chumacera debido al disco de freno. Tf Par aplicado a la flecha.
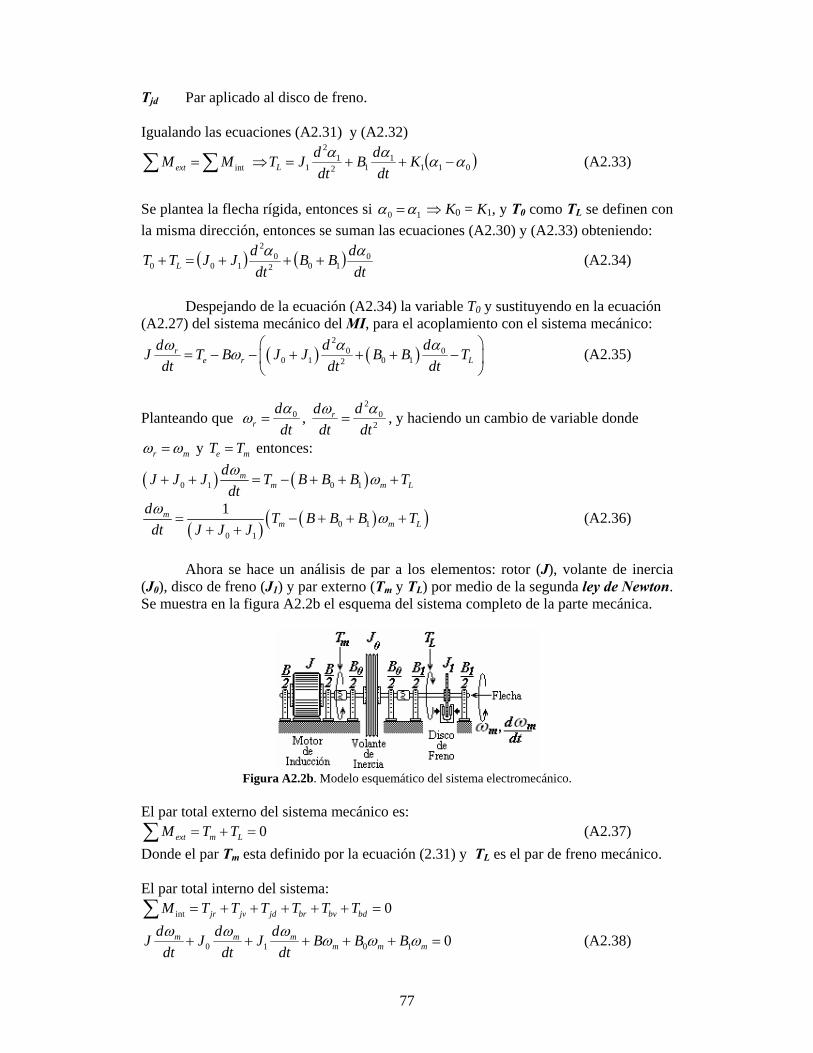
77
Tjd Par aplicado al disco de freno. Igualando las ecuaciones (A2.31) y (A2.32)
intextM M=∑ ∑ ⇒ ( )0111
121
2
1 αααα−++= K
dtdB
dtdJTL (A2.33)
Se plantea la flecha rígida, entonces si 10 αα = ⇒ K0 = K1, y T0 como TL se definen con la misma dirección, entonces se suman las ecuaciones (A2.30) y (A2.33) obteniendo:
( ) ( )dt
dBBdt
dJJTT L0
1020
2
100αα
+++=+ (A2.34)
Despejando de la ecuación (A2.34) la variable T0 y sustituyendo en la ecuación
(A2.27) del sistema mecánico del MI, para el acoplamiento con el sistema mecánico:
( ) ( )2
0 00 1 0 12
re r L
d ddJ T B J J B B Tdt dt dt
α αω ω⎛ ⎞
= − − + + + −⎜ ⎟⎝ ⎠
(A2.35)
Planteando que 0r
ddtαω = ,
20
2r dd
dt dtαω
= , y haciendo un cambio de variable donde
r mω ω= y e mT T= entonces:
( ) ( )0 1 0 1m
m m LdJ J J T B B B Tdtω ω+ + = − + + +
( ) ( )( )0 10 1
1mm m L
d T B B B Tdt J J Jω ω= − + + +
+ + (A2.36)
Ahora se hace un análisis de par a los elementos: rotor (J), volante de inercia (J0), disco de freno (J1) y par externo (Tm y TL) por medio de la segunda ley de Newton. Se muestra en la figura A2.2b el esquema del sistema completo de la parte mecánica.
Figura A2.2b. Modelo esquemático del sistema electromecánico.
El par total externo del sistema mecánico es:
0ext m LM T T= + =∑ (A2.37) Donde el par Tm esta definido por la ecuación (2.31) y TL es el par de freno mecánico. El par total interno del sistema:
int 0jr jv jd br bv bdM T T T T T T= + + + + + =∑
0 1 0 1 0m m mm m m
d d dJ J J B B Bdt dt dtω ω ω ω ω ω+ + + + + = (A2.38)

78
Igualando las ecuaciones (A2.37) y (A2.38) se obtiene:
m L jr jv jd br bv bdT T T T T T T T+ = + + + + +
0 1 0 1m m m
m L m m md d dT T J J J B B Bdt dt dtω ω ω ω ω ω+ = + + + + + (A2.39)
Por lo que las ecuaciones (A2.36) y (A2.39) son iguales. El par de freno mecánico TL es la magnitud del par con que será frenado [25, 37], el disco de freno, el cual será accionado cuando cumpla las condicionales que son expuestas en el capítulo 3, (representación esquemática del disco de freno):
L DT Ff r= (A2.40) fD = Coeficiente de fricción, F = Fuerza de accionamiento, r = Coordenada de ubicación de la fuerza.
Figura A2.3. Geometría de área de contacto de un segmento de
zapata anular de un freno de yugo.
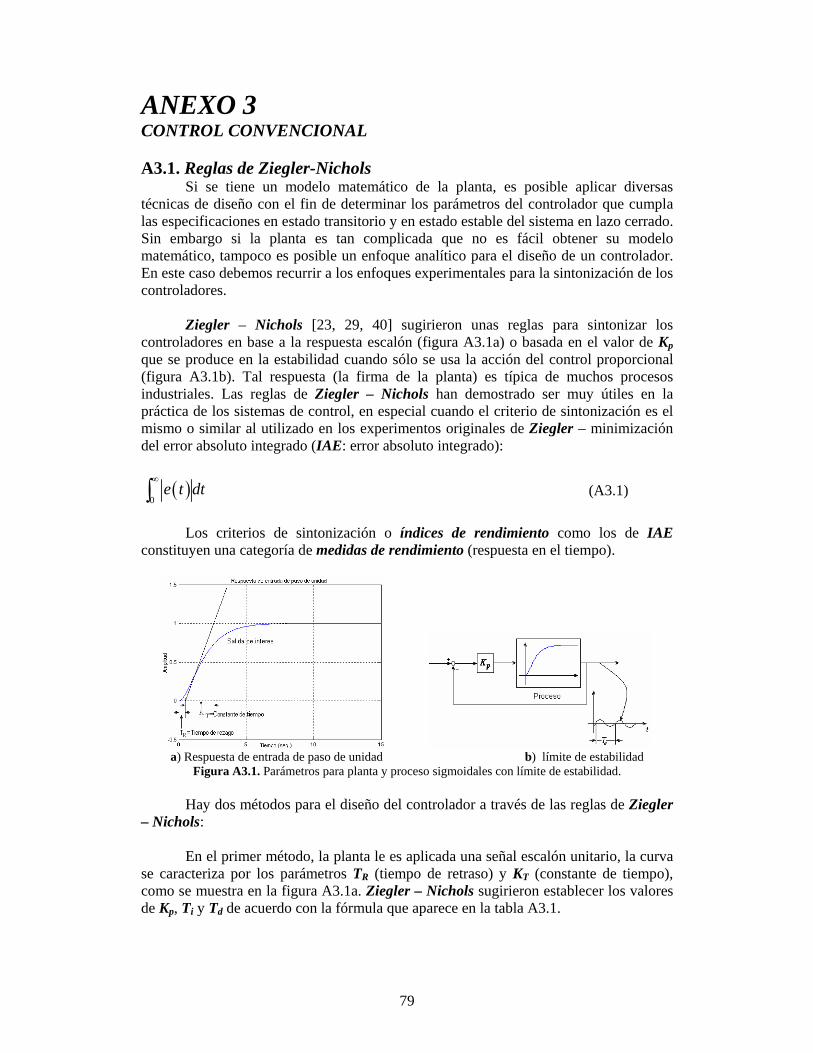
79
ANEXO 3 CONTROL CONVENCIONAL A3.1. Reglas de Ziegler-Nichols
Si se tiene un modelo matemático de la planta, es posible aplicar diversas técnicas de diseño con el fin de determinar los parámetros del controlador que cumpla las especificaciones en estado transitorio y en estado estable del sistema en lazo cerrado. Sin embargo si la planta es tan complicada que no es fácil obtener su modelo matemático, tampoco es posible un enfoque analítico para el diseño de un controlador. En este caso debemos recurrir a los enfoques experimentales para la sintonización de los controladores.
Ziegler – Nichols [23, 29, 40] sugirieron unas reglas para sintonizar los controladores en base a la respuesta escalón (figura A3.1a) o basada en el valor de Kp que se produce en la estabilidad cuando sólo se usa la acción del control proporcional (figura A3.1b). Tal respuesta (la firma de la planta) es típica de muchos procesos industriales. Las reglas de Ziegler – Nichols han demostrado ser muy útiles en la práctica de los sistemas de control, en especial cuando el criterio de sintonización es el mismo o similar al utilizado en los experimentos originales de Ziegler – minimización del error absoluto integrado (IAE: error absoluto integrado):
( )0
e t dt∞
∫ (A3.1)
Los criterios de sintonización o índices de rendimiento como los de IAE
constituyen una categoría de medidas de rendimiento (respuesta en el tiempo).
a) Respuesta de entrada de paso de unidad b) límite de estabilidad
Figura A3.1. Parámetros para planta y proceso sigmoidales con límite de estabilidad.
Hay dos métodos para el diseño del controlador a través de las reglas de Ziegler – Nichols:
En el primer método, la planta le es aplicada una señal escalón unitario, la curva se caracteriza por los parámetros TR (tiempo de retraso) y KT (constante de tiempo), como se muestra en la figura A3.1a. Ziegler – Nichols sugirieron establecer los valores de Kp, Ti y Td de acuerdo con la fórmula que aparece en la tabla A3.1.

80
Tabla A3.1. Regla de sintonización Tipo de controlador Kp Ti Td
P T RK T ∞ 0 PI 0.9 T RK T 0.3RT 0
PID 1.2 T RK T 2 RT 0.5 RT
En el segundo método, primero se establece Ti = 0 y Td = 0. Usando sólo la acción del control proporcional, como se muestra en la figura A3.1b, se incrementa Kp a un valor Ku donde se alcanza el límite de estabilidad del proceso y exhiba oscilaciones sostenidas Tu. Entonces, la ganancia Ku y el periodo Tu correspondiente se determina experimentalmente, como se muestra en la figura A3.1b. Ziegler – Nichols sugirieron que se establecieran los valores de los parámetros Kp, Ti y Td de acuerdo con la fórmula que aparece en la tabla A3.2.
Tabla A3.2. Regla de sintonización Tipo de controlador Kp Ti Td
P 0.5 uK ∞ 0 PI 0.45 uK 1.2uT 0
PID 0.6 uK 0.5 uT 0.125 uT
Está claro que el segundo método no puede aplicarse si la planta no logra exhibir un límite de estabilidad bajo control proporcional. Sin embargo, el experimento para determinar los parámetros de controlador pueden simularse utilizando un modelo del proceso (si existe) en lugar de ejecutarlo sobre una planta real. En la tabla A3.3, se muestra como son utilizadas las variables obtenidas por las reglas de Ziegler – Nichols para la implementación del control. En la tabla A3.4 y la figura A3.1c, los efectos que ocasionan los controles ante una respuesta escalón [23, 29, 40].
Tabla A3.3. Algunos Controles Clásicos Control Símbolo Función de Transferencia
Proporcional P pK
Proporcional más integral PI ( )( )1 1p iK T s+
Proporcional más integral más derivativo PID ( )( )1 1p i dK T s T s+ +
Tabla A3.4. Control
Acción Efecto P Disminuye ess, aumenta Mp. I Disminuye ess, rechazo a perturbaciones. D Disminuye MP, disminuye el tiempo de subida
Figura A3.1c. Respuesta a un escalón unitario.

81
ANEXO 4 SISTEMA DIFUSO A4.1. Introducción a la lógica difusa
La lógica difusa y las redes neuronales artificiales son dos de los avances científicos recientes más importantes del conocimiento. Mediante estas herramientas se ha intentado simular dos de las características más importantes con que cuenta el cerebro humano: la capacidad de aprendizaje y el poder procesar información incompleta o que no es precisa. Estas técnicas se han podido utilizar para la solución de problemas tanto científicos como de la vida diaria. Con una buena combinación de estas dos técnicas es posible un desarrollo tecnológico más amplio en diversos campos, desde la medicina hasta el mejoramiento de electrodomésticos [42, 44, 47, 52, 54, 58, 69].
El término difuso aplicado a la lógica y la teoría de conjuntos y sistemas procede de la expresión Fuzzy Sets (conjuntos difusos) acuñada por Lofti A Zadeh, ingeniero eléctrico iraní nacionalizado en Estados Unidos, profesor en las universidades norteamericanas e instituciones académicas. Sus tesis reúnen obras de pensadores de distintas disciplinas que tenían una visión similar de los problemas alejados de la lógica tradicional: la paradoja del conjunto de Bertrand Russell, el principio de incertidumbre de la física cuántica de W. Heisenberg, la teoría de los conjuntos indeterminados de Max Black en un artículo de 1937 titulado "Vagueness: An exercise in Logical Analysis" y Karl Menger en 1942 con el artículo "Statistical Metrics" y los de los años 50 sobre relaciones difusas de indistinguibilidad, sentaron las bases de lo que hoy es una teoría tan utilizada, sin olvidar la fundamental aportación del polaco en 1922 Jan Lukasiewicz, creador de la lógica multivaluada, que cuestionaba la lógica clásica bivaluada (valores cierto y falso). Todas ellas influyeron para que Zadeh publicase su ensayo “Fuzzy Sets” en Informations and Control” en 1965 y más tarde “Fuzzy algorithm” en la misma revista en 1968. Mientras que Russell y Black utilizaron el término vagueness (vaguedad, indeterminación) para referirse a la nueva lógica o para calificar a los conjuntos en teorización sobre los mismos, Zadeh prefirió el término fuzzy (borroso, difuso) para determinar a sus conjuntos y a la lógica en la que se apoya su análisis.
Esta lógica, en la que están basados los controladores difusos, está mucho más cerca en espíritu de la manera de razonar de los humanos y el lenguaje natural que los sistemas lógicos tradicionales. Básicamente, la lógica difusa proporciona un medio efectivo de captar la naturaleza inexacta del mundo real. Los controladores difusos proporcionan en esencia un lenguaje matemático que nos permita automatizar la estrategia lingüística del control basada en el conocimiento de un experto, en una estrategia de control automático. Por lo tanto los sistemas inteligentes permiten emular la capacidad de la mente humana para razonar y aprender bajo las condiciones de incertidumbre e imprecisión del mundo real. Las principales metodologías son las siguientes: Sistemas difusos (Computación lingüística): Representación del conocimiento, ó razonamiento aproximado basado en reglas y cómputo con palabras. Redes neuronales (Neurocomputación): Identificación, aprendizaje y adaptación. Algoritmos genéticos (Bioprogramación): Sistematización de búsquedas aleatorias y optimización.

82
Razonamiento probabilístico: Razonamiento evidencial, tratamiento de la incertidumbre. A continuación se presentan los aspectos básicos de la lógica difusa. A4.2. Conjunto difuso Un conjunto difuso se define matemáticamente como:
( )( ) , |FF u u u Uμ= ∈ (A4.1)
donde μF : U → [0,1], μF(u) es la función de pertenencia ó grado de pertenencia de las variables u y U es el dominio de la aplicación, llamado en terminología “difusa” el Universo de Discurso. La función de pertenencia representa la notación de la pertenencia parcial de un elemento a una clase. En consecuencia la clase posee fronteras no abruptas y está definida por sus elementos y los grados de pertenencia asociados.
Las funciones de pertenencia pueden ser representadas a través de funciones triangulares, trapezoidales, gaussianas, de campana o bien con funciones sigmoidales. Con las operaciones básicas se permite determinar los conjuntos difusos resultantes de proposiciones, reglas y silogismos, los cuales pueden representarse como relaciones u operaciones entre conjuntos difusos, como se muestra en la figura A4.1.
Figura A4.1. Obtención del conjunto difuso resultante.
Las operaciones básicas, la unión, intersección y el complemento de conjuntos
difusos fueron definidos por Zadeh [92] como: Unión (norma – s).
Sea s:[0,1]×[0,1]→[0,1] un mapeo que transforma las funciones de pertenencia de los conjuntos difusos de A y B en la función de pertenencia de la unión de A y B:
( ) ( )( ) , max ;A BAoB A B x x xμ μ⇒ ∪ = ó ( ) ( ) ( )( ),A B A Bx s x xμ μ μ∪ = (A4.2)
Intersección (norma – t).
Sea t:[0,1]×[0,1]→[0,1] un mapeo que transforma las funciones de pertenencia de los conjuntos difusos de A y B en la función de pertenencia de la intersección de A y B:
( ) ( )( ) ,min ;A BAyB A B x x xμ μ⇒ ∩ = ó ( ) ( ) ( )( ),A B A Bx t x xμ μ μ∩ = (A4.3)
Complemento:
Sea c:[0,1]→[0,1] un mapeo que transforma la funciones de pertenencia de un conjunto difuso de A en la función de pertenencia del complemento de A:
( ) ( ) ( ) , | 1A A AA A x x x xμ μ μ¬ ¬⇒¬ = = − ó ( ) ( )A Ac x xμ μ⎡ ⎤ =⎣ ⎦ (A4.4)
donde x ∈ U (universo de discurso)

83
En muchos casos el tipo de agregación requerido entre conjuntos difusos requerido no es la unión pura de los operadores norma – s ni la intersección pura de los operadores norma – t, sino alguna mezcla entre estos dos. A4.3. Representación del conocimiento
Una base de conocimiento está formada por un conjunto de reglas de inferencia cuyos antecedentes son proposiciones difusas compuestas bidimensionales, teniendo las siguientes propiedades: • Una base de conocimiento es completa cuando al menos una regla aplica para
cualquier valor de las variables de entrada (de los antecedentes). • Una base de conocimiento es consistente cuando todos los antecedentes de las
reglas son diferentes. • El orden de las reglas no altera la inferencia (paralelismo). • El orden de las proposiciones del antecedente no altera la inferencia y cuando se
conserve la relación lógica entre ellas.
Donde la base de reglas es el comportamiento dinámico de un sistema difuso caracterizado por un conjunto de normas lingüísticas basadas en el conocimiento del experto. El conjunto de condiciones a satisfacer siempre está asociado a conceptos difusos, mientras que el conjunto de acciones a tomar puede estar asociado de dos formas diferentes [42, 44, 69]: • Asociado según Mandami: cada uno de los consecuentes de las reglas está formado
por un conjunto difuso. • Asociado según Sugeno: cada uno de los consecuentes de las reglas contiene una
ecuación con una combinación de las variables de entrada.
Las reglas de inferencia, reglas de conocimiento ó reglas difusas, son enunciados condicionales de tipo si – entonces: Dependiendo de la forma del antecedente y el consecuente se tiene: • Regla difusa tipo Mamdani para un sistema difuso con dos variables de entrada y
una salida: si x es Lx y y es Ly, entonces z es Lz (A4.5) en donde: x, y son las variables lingüísticas de antecedente. z es la variable lingüística del consecuente. Lx, Ly, Lz son valores lingüísticos (conjuntos difusos). • Reglas difusas tipo Takagi-Sugeno (TS) el consecuente es una función de las
variables de entrada: si x ∈ A y y ∈ B, entonces z = f(x,y) (A4.6) en donde f es una función lineal o no lineal.
El tratamiento matemático de consecuentes con funciones no lineales es difícil e impráctico. Por esta razón se emplean casi exclusivamente funciones lineales:
84
si x ∈ A y y ∈ B, entonces z = k1x + k2y + k3 (A4.7) en donde k1, k2, k3 son constantes.
Por lo que las regla de inferencia puede interpretarse como una relación entre los conjuntos difusos que representan al antecedente y al consecuente de la regla; consecuentemente puede representarse por medio del conjunto difuso resultante. A4.4. Razonamiento aproximado
El concepto de razonamiento aproximado (“Fuzzy Reasoning”) puede ser interpretado como el proceso de obtener, a través de la teoría de conjuntos difusos como principal herramienta unas conclusiones imprecisas a partir de unas premisas también imprecisas. La contribución fundamental del razonamiento aproximado es el uso que hace de las variables y la representación de las proposiciones en términos de valores de verdad lingüísticos -subconjuntos difusos- como valores de esas variables [42, 44, 47, 52, 58, 69].
La teoría del razonamiento aproximado permite representar también cuantificadores lingüísticos situados entre el “para todo” y el “existe” clásicos. Esto facilita representar enunciados como “la mayoría de los coches lujosos son caros” o “bastantes electores votarán en blanco”. Zadeh indicó que un cuantificador como “la mayoría” puede ser representado como un subconjunto difuso sobre un universo de discurso. Los cuantificadores aproximados se usan para representar conocimiento de sentido común. Las etapas del razonamiento difuso realizadas por un sistema de inferencia difusa son:
• Comparar las variables de entrada con las funciones de pertenencia de la premisa para obtener los valores de pertenencia de cada etiqueta lingüística. A esta etapa se le denomina fusificación.
• Cambiar los valores de pertenencia en la parte correspondiente a la premisa con
el fin de obtener los pesos de cada regla.
• Generar el consecuente calificando la fuerza de disparo de cada regla, para obtener su peso.
• Agregar los consecuentes de acuerdo a su peso para producir una salida
numérica. A esta etapa se le denomina desfusificación. En el trabajo se emplean las reglas difusas si – entonces de Takagi y Sugeno. La salida de cada regla es la combinación lineal de las variables de entrada más un término constante y la salida final es la suma pesada de las salidas de las reglas que se disparan. A.4.5. Control difuso
El control difuso se basa en sistemas de inferencia difuso, donde se define una ley de control no lineal empleando un conjunto de reglas difusas del tipo si – entonces. El antecedente de la regla describe una región difusa en el espacio de estados, mientras que el consecuente de la regla específica a su vez la ley de control aplicable dentro de la región difusa definida por el antecedente de la propia regla, figura A4.2a y A4.2b.

85
Figura A4.2a. Control difuso.
inferencia desfusificaciónfusificación escalamiento
factoresmétodo
desfusificador
reglas
operacioneslógicas
conjuntosdifusos
método inferencia
escalamiento
factores
Figura A4.2b. Detalle del controlador difuso.
A4.5.1. Sistema de inferencia
El sistema de inferencia difuso emula los mecanismos del razonamiento humano para obtener conclusiones válidas empleando un conjunto de reglas de procedimiento del tipo si – entonces, donde las entradas y salidas son variables lingüísticas.
Figura A4.3. Sistema de inferencia difuso.
La figura A4.3 muestra el mecanismo básico de inferencia difusa y formula un
mapeo de entrada – salida. Los sistemas de inferencia difusa también son conocidos como sistemas basados en reglas difusas, modelos difusos, memorias asociativas difusas, ó controladores difusos cuando son usados con fines de control.
La figura A4.4 muestra las variables lingüísticas que toman valores que se representan como funciones de pertenencia, las cuales también son una representación de un conjunto difuso. Por lo que las variables lingüísticas constituyen el primer paso para incorporar el conocimiento humano en los sistemas computacionales de una manera sistemática y eficiente.
Figura A4.4. Variables lingüísticas.

86
La aplicación de los sistemas de inferencia difusos en los sistemas de control
requiere que las entradas y las salidas sean variables numéricas reales, por lo cual se añade el fusificador (convertidor numérico a lingüístico) y el desfusificador (convertidor lingüístico a numérico) para procesar entradas y salidas numéricas reales, como se muestra en la figura A4.5.
Figura A4.5. Sistema difuso ó control difuso
El proceso de fusificación está relacionado con las vaguedades e impresiones
del lenguaje natural, es decir, se trata de realizar una valoración completamente subjetiva que transformará un valor medio en un valor subjetivo, a partir de realizar un mapeo entre el espacio de entrada observado y unos conjuntos difusos en un determinado universo de discurso de la entrada [42, 44, 47, 52, 58, 69]. Fusificación (convertidor de numérico a lingüístico): el proceso consiste en convertir un valor numérico específico x*, de una variable numérica real x, a un conjunto difuso A’: Fusificación: x* → A’ (A4.8)
El conjunto difuso así obtenido puede ser usado como entrada por el sistema de inferencia difuso para obtener conclusiones. Las características deseables de un convertidor de numérico a lingüístico es: • El conjunto difuso A’ debe tener un grado de pertenencia alto en x*. • El fusificador debe ayudar a suprimir posible ruido en la señal x. • El fusificador debe ayudar a simplificar los cálculos en el sistema de inferencias. El proceso de desfusificación debe ser escogido de acuerdo con la aplicación que se desea hacer, ya que la desfusificación realiza el promedio de los pesos de cada regla y de su grado de disparo [42, 44, 47, 52, 58, 69]. Desfusificación (convertidor de lingüística a numérica): el proceso consiste en convertir un conjunto difuso C’ a un valor especifico z*, de una variable numérica real z. Desfusificación: C’ → z* (A4.9)
El conjunto difuso C’ es la conclusión de salida de un sistema de inferencia difuso, obtenida como la unión de los conjuntos difusos de las conclusiones parciales. Las características deseables de un convertidor de lingüística a numérica: • El valor específico z* debe representar intuitivamente al conjunto difuso C’. • La obtención del valor especifico z* debe ser computacionalmente simple
(especialmente para controladores que deben operar en tiempo real). • Un cambio pequeño en C’ no debe resultar en un cambio grande en z*.

87
Por lo tanto la etapa de desfusificación es la última etapa del controlador difuso y la encargada de generar un valor no-difuso a partir del valor difuso generado en la etapa de inferencia. Los controladores difusos se pueden clasificar en dos tipos: 1.- Controlador tipo Mamdani. 2.- Controlador tipo Takagi-Sugeno.
La principal diferencia entre estos controladores radica en la consecuencia de las reglas. Para el controlador tipo Mamdami esta consecuencia es un conjunto difuso y para el tipo Takagi-Sugeno es una función lineal de salida.
Siguiendo la estructura del controlador difuso que se muestra en la figura A4.5, se explica de manera breve el desarrollo del controlador del tipo Takagi-Sugeno. 1.- Fusificación (convertidor de numérico a lingüístico): de los datos de entrada [42, 44, 47, 52, 58, 69]. 2.- Obtención de una base de reglas. El controlador de Takagi-Sugeno tiene la particularidad de que las reglas que definen su funcionamiento son de la forma siguiente [42, 44]:
( ) ( )( ) ( )( ) ( )( ) ( )1
1 1 1 11 1 1 2: , , ,
n Nx n x N x m NR SI x L y y x L y y x L ENTONCESu f x x x∈ ∈ ∈ =K K K
M ( ) ( )( ) ( )( ) ( )( ) ( )1 1 2: , , ,
n n N
m m m mx n x N x m m NR SI x L y y x L y y x L ENTONCESu f x x x∈ ∈ ∈ =K K K
M ( ) ( )( ) ( )( ) ( )( ) ( )1 1 2: , , ,
N n N
M M M Mx n x N x M M NR SI x L y y x L y y x L ENTONCESu f x x x∈ ∈ ∈ =K K K
donde: R(m) es la m-ésima regla. M es el número de reglas. X es el conjunto de las variables lingüísticas, la cual es descrito por
( )1 2, , , , , Tn NX x x x x= K K .
N es el número de elementos del conjunto X. LX es el valor lingüístico que toman las variables lingüísticas. 3.- Obtención de la inferencia de la base de reglas, es decir, extracción de la conclusión de cada una de las reglas. Con estas reglas se realiza primero para algunos valores de entrada del proceso o del sistema * * *
1 , , ,n Nx x xK K , sus grados de pertenencia ( )*mxn
nLxμ ,
son calculados y llamados antecedentes de reglas o pesos de reglas, se obtiene el mínimo (Implicación del mínimo) de los N grados de pertenencia para la regla m y se denota como
muμ . Posteriormente, los valores mμ son computados como
( )* * * *1 2, , ,m m Nu f x x x= K . Para cada una de las reglas R(m) se obtiene la dupla ( )*,
mu muμ .
4.- Finalmente, la salida combinada de todas las reglas es la suma de los pesos normalizados de todos los pares, es decir se utiliza el proceso de defusificación

88
(convertidor de lingüística a numérica), por centro de media para obtener la salida del controlador difuso [42, 44, 47, 52, 58, 69]:
( )
( )
* *
1
*
1
m
m
M
u n mm
M
u nm
x uu
x
μ
μ
=
=
=∑
∑ (A4.10)
A4.6. ANFIS El modelado de sistemas basados en principios físicos, lo cual es conocido como modelado por conocimiento, suele en ocasiones resultar muy complejo y su grado de dificultad depende del proceso a controlar. Por el contrario, un sistema de inferencia difusa emplea reglas difusas si – entonces que pueden modelar los aspectos cualitativos del conocimiento humano y los procesos de razonamiento sin requerir de un análisis cuantitativo preciso. Este modelado o identificación difusa inicialmente explorada por Takagi y Sugeno ha encontrado numerosas aplicaciones prácticas en las áreas de control, predicción e inferencia. Sin embargo, algunos aspectos fundamentales que atañen a estas aproximaciones son específicamente los siguientes:
• No existen métodos estándares para transformar el conocimiento o la experiencia humana en una base de reglas y datos de un sistema de inferencia difusa.
• Existe la necesidad de aplicar métodos efectivos para simplificar las funciones de pertenecía de tal modo que se pueda minimizar el error de medición de la salida u optimizar un índice de desempeño.
Bajo esta perspectiva, surge la arquitectura llamada ANFIS (Adaptive Neuro-based Fuzzy Inference System), de Matlab/Simulink®, el cual fue desarrollado por Jyh Shing Roger Jang en 1993 [69]. La capacidad de adaptación de las redes ANFIS las hacen directamente aplicables a una gran cantidad de áreas como control adaptable, procesamiento y filtrado de señales, clasificación de datos y extracción de características a partir de ejemplos. Por lo que ANFIS puede servir de base para construir un conjunto de reglas si – entonces con funciones de pertenecía apropiadas para generar los pares entrada – salida deseados. Una red adaptable es una red multicapa prealimentada en la cual cada nodo desempeña una función particular (función nodo) sobre las señales que llegan a él y posee un conjunto de parámetros pertenecientes al mismo. Las fórmulas para las funciones nodales pueden variar de nodo a nodo, y la selección de cada función nodal depende de la función entrada – salida que la red adaptable debe llevar a cabo. Las ligas en una red ANFIS solamente indican la dirección del flujo de señales entre los nodos: no hay pesos asociados con estas ligas. Fundamentalmente, no hay muchas restricciones en cuanto a las funciones nodales de una red adaptable, excepto la diferenciabilidad por partes. Estructuralmente, la única limitación de la configuración de la red es que debe ser de tipo prealimentada. Salvo estas dos restricciones mínimas, las aplicaciones de las redes adaptables son inmensas en diversas áreas. Una clase de redes adaptables que funcionalmente son

89
equivalentes a los sistemas de inferencia difusa es la arquitectura conocida como ANFIS. Para efectuar el análisis de esta estructura, se asumirá por simplicidad que el sistema de inferencia difuso en consideración tiene dos entradas x y y, y una salida única z y que posee la arquitectura mostrada en la figura A4.6. También se conjetura que la base de reglas contiene dos sentencias difusas si – entonces del tipo Takagi y Sugeno.
Figura A4.6. Red ANFIS de dos entradas.
Las reglas a emplear y las funciones nodales se describen a continuación: Regla 1: si x es A1 y y es B1 entonces F1=p1x+q1y+r1. Regla 2: si x es A2 y y es B2 entonces F2=p2x+q2y+r2. Capa 1: Cada nodo i en esta capa es un nodo cuadrado (adaptable) cuya salida está dada por
( ), 1, il i i Ax f xμ= = para i = 1, 2 (A4.11)
( )2, 1, 2 il i i Bx f xμ
−−= = para i = 3, 4 Donde x (ó y) es la entrada al nodo i, y Ai (ó Bi-2) es la etiqueta lingüística (pequeño, largo, etc.) asociada con dicha función nodal. Usualmente, se eligen las funciones de pertenencia con forma de triangular, gaussiana, trapezoidales, campana, campana generalizada, etc.…, con un máximo igual a 1 y un mínimo de cero. Los parámetros involucrados en esta capa se le conocen como parámetros de la premisa. Capa2: Cada nodo de esta capa es un nodo circular etiquetado con la letra griega Π, cuya función es multiplicar las señales que llegan a él y enviar el producto a la salida. Para nuestro caso, tenemos:
( ) ( )2, i ii i A Bx w x yμ μ= = × , i = 1, 2. (A4.12) donde la salida de cada nodo representa la fuerzas de dispar de una regla. Capa 3: Cada nodo en esta capa es del tipo circular y esta etiquetado con las letras N. Aquí, el i-ésimo nodo calcula la relación de la fuerza de disparo (o peso) de la i-ésima regla respecto a la suma de las fuerzas de disparo de todas las reglas y su salida está dada por

90
2,3,
1 2
ii i
xx w
w w= =
+, i = 1,2. (A4.12)
Por conveniencia, las salidas de esta capa se denominan fuerzas de disparo normalizadas. Capa 4: Cada nodo i en esta capa es cuadrado y con función nodal
4,i i ix w F= , i = 1,2. (A4.13) En nuestro caso dado que F1=p1x+q1y+r1, resulta obvio que podemos escribir
( )4, , , , ,i i i i i ix w F p q r x y= , i = 1,2. (A4.14) Donde iw es la salida de la capa 3 y pi, qi, ri es el conjunto de parámetros. Los parámetros de esta capa son conocidos como parámetros consecuentes. Capa 5: el nodo individual de esta capa es circular y está etiquetado con la letra Σ y calcula la salida total como suma de todas las señales que llegan a él, esto es
5,1 4, 4,i i ii
x w f x= =∑ ∑ , i = 1, 2. (A4.15)
Con esto se construye una red adaptable de dos entradas una salida, que es funcionalmente equivalente a un sistema de inferencia difuso. Hasta aquí se han explicado los conceptos fundamentales relativos a los sistemas de inferencia difusa, los cuales constituyen métodos efectivos para sintonizar funciones de pertenencia, la posibilidad de modelar y una aproximación en la dinámica de planta cuya información no se conoce por completo ó que al pertenecer a procesos industriales se sabe que muestra no linealidades. Para emplear ANFIS en la identificación de sistemas dinámicos, debe seleccionarse distintos datos de entrenamiento, que contemplen la dinámica de la planta, aquellas que proporcionen el menor error de seguimiento de la señal de consigna y de sintonización. En consecuencia se utilizan los parámetros obtenidos por ANFIS para observar su desempeño del modelo.

91
ANEXO 5 IMPLEMENTACIÓN EN SIMULINK® Se presenta la implementación de las ecuaciones mostradas en los capítulos 2 y 3 en Simulink® [6, 7, 31, 49, 55, 58]. A5.1. Implementación de las ecuaciones del sistema electromecánico Corriente isd en el devanado del estator sd
1sd rdsd s sd m
s
di diV R i Ldt L dt
⎡ ⎤= − −⎢ ⎥⎣ ⎦ (2.19)
Corriente isq en el devanado del estator sq
1sq rqsq s sq m
s
di diV R i L
dt L dt⎡ ⎤
= − −⎢ ⎥⎣ ⎦
(2.20)
Corriente is0 en el devanado del estator s0
[ ]00 0
1ss s s
sl
di V R idt L
= − (2.21)
Corriente ird en el devanado del rotor rd
1rd sdr rd r m rq m m sq m
r
di diR i L i L i Ldt L dt
ω ω⎡ ⎤= − − − −⎢ ⎥⎣ ⎦ (2.22)
Corriente irq en el devanado del rotor rq
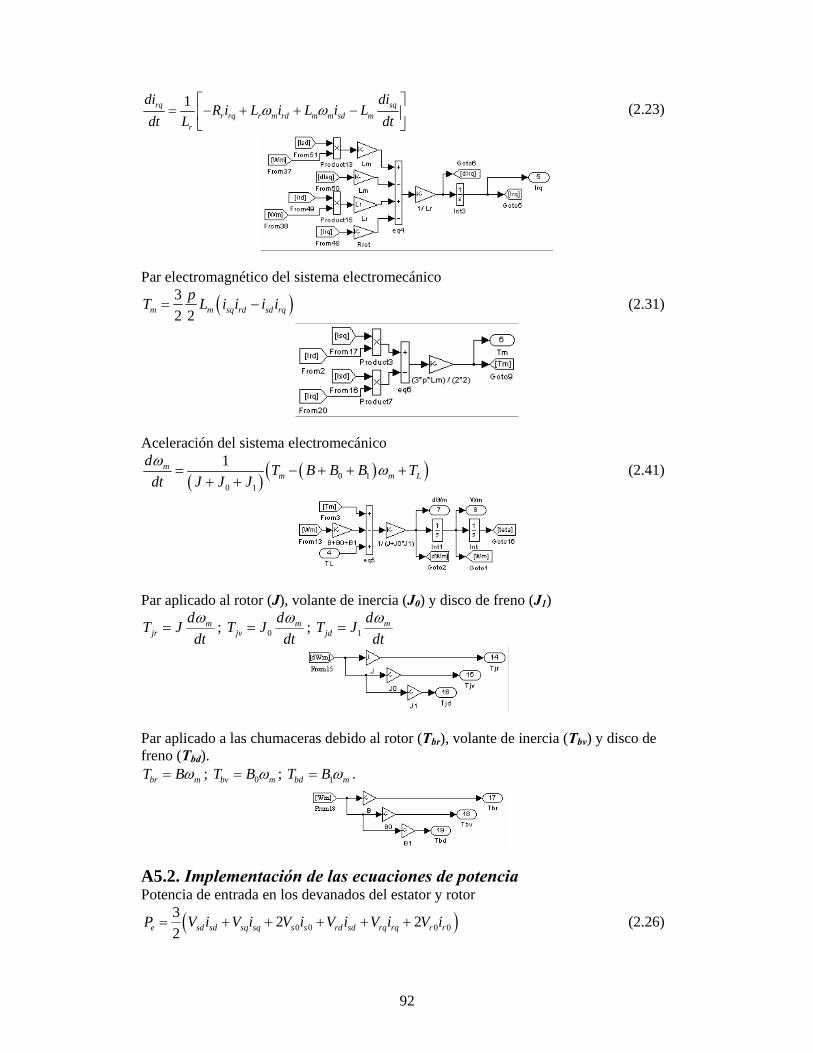
92
1rq sqr rq r m rd m m sd m
r
di diR i L i L i L
dt L dtω ω
⎡ ⎤= − + + −⎢ ⎥
⎣ ⎦ (2.23)
Par electromagnético del sistema electromecánico
( )32 2m m sq rd sd rq
pT L i i i i= − (2.31)
Aceleración del sistema electromecánico
( ) ( )( )0 10 1
1mm m L
d T B B B Tdt J J Jω ω= − + + +
+ + (2.41)
Par aplicado al rotor (J), volante de inercia (J0) y disco de freno (J1)
mjr
dT Jdtω
= ; 0m
jvdT Jdtω
= ; 1m
jddT Jdtω
=
Par aplicado a las chumaceras debido al rotor (Tbr), volante de inercia (Tbv) y disco de freno (Tbd).
br mT Bω= ; 0bv mT B ω= ; 1bd mT Bω= .
A5.2. Implementación de las ecuaciones de potencia Potencia de entrada en los devanados del estator y rotor
( )0 0 0 03 2 22e sd sd sq sq s s rd sd rq rq r rP V i V i V i V i V i V i= + + + + + (2.26)

93
Donde e re mag rr sP P P P P= + + + Pérdida de potencia en la resistencia del estator
( )2 2 20
3 22re s sd sq sP R i i i⎡ ⎤= + +⎣ ⎦ (2.28)
Pérdida de potencia en el rotor
( )2 2 20
3 22rr r rd rq rP R i i i⎡ ⎤= + +⎣ ⎦ (2.28)
Potencia de salida del sistema
( )32s m m m m sq rd sd rqP T L i i i iω ω⎡ ⎤= = −⎣ ⎦ (2.30)
Pérdidas de potencia magnética en el entrehierro
( ) ( ) ( )( ) ( ) ( )
0 0
0 0
232 2
d d d d ds sd m rd sd s sq m rq sq sl s sdt dt dt dt dt
mag d d d d dm sd r rd rd m sq r rq rq rl r rdt dt dt dt dt
L i L i i L i L i i L i iP
L i L i i L i L i i L i i
⎡ ⎤+ + + + +⎢ ⎥=⎢ ⎥+ + + + +⎣ ⎦
(2.29)
Las ecuaciones del sistema electromecánico y potencia son agrupados en un subsistema, el cual muestra las variables de entrada (Vsd, Vsq, Vs0, TL) y de salida (Isd, Isq, Is0, Ird, Irq, Tm, dωm, ωm, Pre, Prr, Pmag, Ps, Pe, Tjr, Tjv, Tjd, Tbr, Tbv, Tbd).

94
A5.3. Implementación de la excitación trifásica para el modelo del MI.
La excitación del modelo se obtiene a partir de la excitación trifásica proporcionada al MI, mediante las siguientes ecuaciones: Funciones seno y coseno
( )( ) ( ) ( )( )( )00cos sen
t
e s et t t dtθ ω θ= ∫ (A1.3.7)
( )( ) ( ) ( )( )00sen cos
t
e s et t t dtθ ω θ= −∫ (A1.3.8)
Conversión de 2 → 3 fases, utilizando la ecuación 2.16
( )( )cossa eV Amp tθ= (A1.3.4)
( )( ) ( )( )( )cos 3
2e e
sb
Amp t sen tV
θ θ− −= (A1.3.5)
( )( ) ( )( )( )3 cos
2e e
sc
Amp sen t tV
θ θ−= (A1.3.6)
Conversión de 3 → 2 fases, utilizando la ecuación 2.15
3sc sb
sdV VV −
= (A1.3.1)
( )23
sa sb scsq
V V VV
− −= (A1.3.2)
0 3sa sb sc
sV V VV + +
= (A1.3.3)

95
Se reagrupa en un subsistema el cual lo etiquetaremos como “generador de funciones”, mostrando las entradas (amplitud de voltaje Amp y velocidad síncrona ωs) y salidas (Vsd, Vsq, Vs0).
A5.4. Implementación del sistema (plata) Se reagrupa el sistema electromecánico y el generador de funciones, en un subsistema, se etiqueta como sistema (planta).
A5.5. Implementación del control convencional
1( ) ( )P ref m I ref m mAmp K K dt Kω ω ω ω ω= − + − +∫ (3.13)
s ( ) ( )P ref m I ref m mK K dtω ω ω ω ω ω= − + − +∫ (3.14) Donde las KP y KI son la ganancia del control PI.

96
El freno mecánico (TL) se accionará cuando el sistema (planta) este desacelerando, y siempre cuando cumpla las siguientes condicionales.
El control Proporcional (P), para generar el par, es a partir del error generado
entre la velocidad de referencia (ωref) y la velocidad mecánica (ωm), donde el par TL es: ( )L F ref mT K ω ω= − (3.15)
KF = ganancia del control
0 0 0ref entrada Ld dt Pot error Tω < ∧ > ∧ < ⇒ || 0 0 0ref entrada LPot error Tω ≅ ∧ > ∧ ≠ ⇒
Agrupando las condicionales en un subsistema que representara el freno mecánico que será aplicado al sistema (planta).
Entonces el subsistema que obtenemos es lo que conforma el control convencional con entradas (ωref, ωm, Pot entrada) y salidas (Amp, ωs, TL).
A5.6. Implementación del control inteligente. A partir de las variables de de entrada al control inteligente (velocidad de referencia (ωref(k)) y velocidad mecánica (ωm(k))), generar las variables de control ωs(k), Amp(k), TL(k).
El freno mecánico (TL) generado del control difuso se accionará al sistema (planta) cuando cumpla las siguientes condiciones:
0 0 0ref entrada Ld dt Pot error Tω < ∧ > ∧ < ⇒ y 0 0 0ref entrada LPot error Tω ≅ ∧ > ∧ ≠ ⇒

97
A partir de los datos de entrenamiento, ANFIS® genera un archivo *.fis que
representa las reglas de aprendizaje, como se puede ver en el Anexo 6. Con el bloque (MATLAB Function) permite evaluar el archivo *.fis, en Simulink®.
donde evalfis evaluar el archivo *.fis. u entrada al bloque (MATLAB Function). datos_4WsincWe_Amp_3conjuntos500.fis nombre del archivo a ser evaluado.
A5.7. Implementación del sistema (planta) con el control convencional e inteligente.
El sistema (plata) muestra las variables de entrada: amplitud del voltaje (Amp(t)), velocidad síncrona ωs(t) y par de freno mecánico (TL(t)), y salida generada por el sistema (planta): velocidad mecánica (ωm(t)). Implementación del control convencional al sistema (planta).

98
Implementación del control inteligente al sistema (planta).
Implementación del control convencional ó inteligente y el sistema (planta).
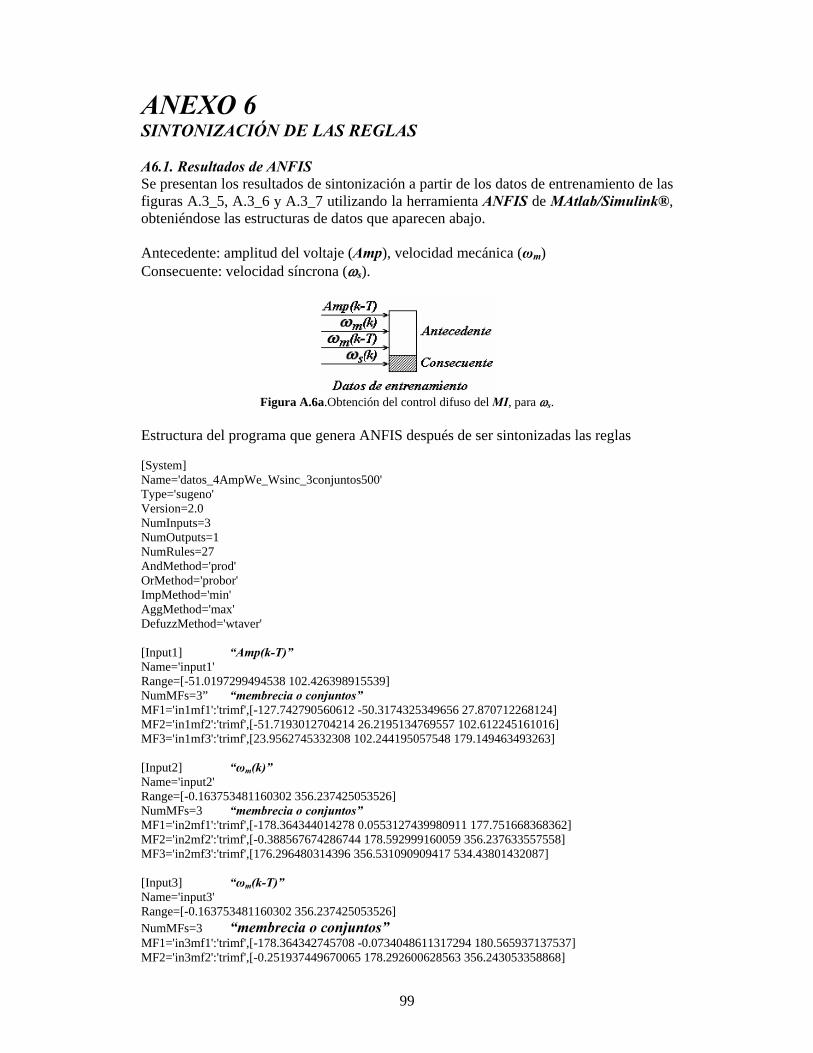
99
ANEXO 6 SINTONIZACIÓN DE LAS REGLAS A6.1. Resultados de ANFIS Se presentan los resultados de sintonización a partir de los datos de entrenamiento de las figuras A.3_5, A.3_6 y A.3_7 utilizando la herramienta ANFIS de MAtlab/Simulink®, obteniéndose las estructuras de datos que aparecen abajo. Antecedente: amplitud del voltaje (Amp), velocidad mecánica (ωm) Consecuente: velocidad síncrona (ωs).
Figura A.6a.Obtención del control difuso del MI, para ωs.
Estructura del programa que genera ANFIS después de ser sintonizadas las reglas [System] Name='datos_4AmpWe_Wsinc_3conjuntos500' Type='sugeno' Version=2.0 NumInputs=3 NumOutputs=1 NumRules=27 AndMethod='prod' OrMethod='probor' ImpMethod='min' AggMethod='max' DefuzzMethod='wtaver' [Input1] “Amp(k-T)” Name='input1' Range=[-51.0197299494538 102.426398915539] NumMFs=3” “membrecia o conjuntos” MF1='in1mf1':'trimf',[-127.742790560612 -50.3174325349656 27.870712268124] MF2='in1mf2':'trimf',[-51.7193012704214 26.2195134769557 102.612245161016] MF3='in1mf3':'trimf',[23.9562745332308 102.244195057548 179.149463493263] [Input2] “ωm(k)” Name='input2' Range=[-0.163753481160302 356.237425053526] NumMFs=3 “membrecia o conjuntos” MF1='in2mf1':'trimf',[-178.364344014278 0.0553127439980911 177.751668368362] MF2='in2mf2':'trimf',[-0.388567674286744 178.592999160059 356.237633557558] MF3='in2mf3':'trimf',[176.296480314396 356.531090909417 534.43801432087] [Input3] “ωm(k-T)” Name='input3' Range=[-0.163753481160302 356.237425053526] NumMFs=3 “membrecia o conjuntos” MF1='in3mf1':'trimf',[-178.364342745708 -0.0734048611317294 180.565937137537] MF2='in3mf2':'trimf',[-0.251937449670065 178.292600628563 356.243053358868]

100
MF3='in3mf3':'trimf',[175.976138730965 356.389535058823 534.43801432087] [Output1] “ωs(k)” Name='output' Range=[-1.30868910401133 389.314776672456] NumMFs=27 ”Peso de cada regal” MF1='out1mf1':'constant',[-0.487517866702585] MF2='out1mf2':'constant',[122.491644937736] MF3='out1mf3':'constant',[-2140.89396496094] MF4='out1mf4':'constant',[-36.9871215772204] MF5='out1mf5':'constant',[146.427163560887] MF6='out1mf6':'constant',[202.862831361318] MF7='out1mf7':'constant',[0] MF8='out1mf8':'constant',[269.894562310851] MF9='out1mf9':'constant',[308.022382682936] MF10='out1mf10':'constant',[-0.131413490080833] MF11='out1mf11':'constant',[-233.890672102813] MF12='out1mf12':'constant',[-582.948702195173] MF13='out1mf13':'constant',[455.667792017792] MF14='out1mf14':'constant',[184.199352393763] MF15='out1mf15':'constant',[-553.019390551647] MF16='out1mf16':'constant',[-1785.00502772521] MF17='out1mf17':'constant',[1116.92459557815] MF18='out1mf18':'constant',[361.730431699276] MF19='out1mf19':'constant',[-179.360202833311] MF20='out1mf20':'constant',[-539.76363703536] MF21='out1mf21':'constant',[0] MF22='out1mf22':'constant',[748.151406520278] MF23='out1mf23':'constant',[166.571693535702] MF24='out1mf24':'constant',[-114.607289763908] MF25='out1mf25':'constant',[-1790.20035660526] MF26='out1mf26':'constant',[705.07559655019] MF27='out1mf27':'constant',[380.30898709455] [Rules] “Posibles combinaciones de los conjuntos de entrada y peso del las reglas” [Input1] [Input2] [Input3], [Output1] 1 1 1, 1 (1) : 1 1 1 2, 2 (1) : 1 1 1 3, 3 (1) : 1 1 2 1, 4 (1) : 1 1 2 2, 5 (1) : 1 1 2 3, 6 (1) : 1 1 3 1, 7 (1) : 1 1 3 2, 8 (1) : 1 1 3 3, 9 (1) : 1 2 1 1, 10 (1) : 1 2 1 2, 11 (1) : 1 2 1 3, 12 (1) : 1 2 2 1, 13 (1) : 1 2 2 2, 14 (1) : 1 2 2 3, 15 (1) : 1 2 3 1, 16 (1) : 1 2 3 2, 17 (1) : 1 2 3 3, 18 (1) : 1 3 1 1, 19 (1) : 1 3 1 2, 20 (1) : 1 3 1 3, 21 (1) : 1 3 2 1, 22 (1) : 1 3 2 2, 23 (1) : 1 3 2 3, 24 (1) : 1 3 3 1, 25 (1) : 1
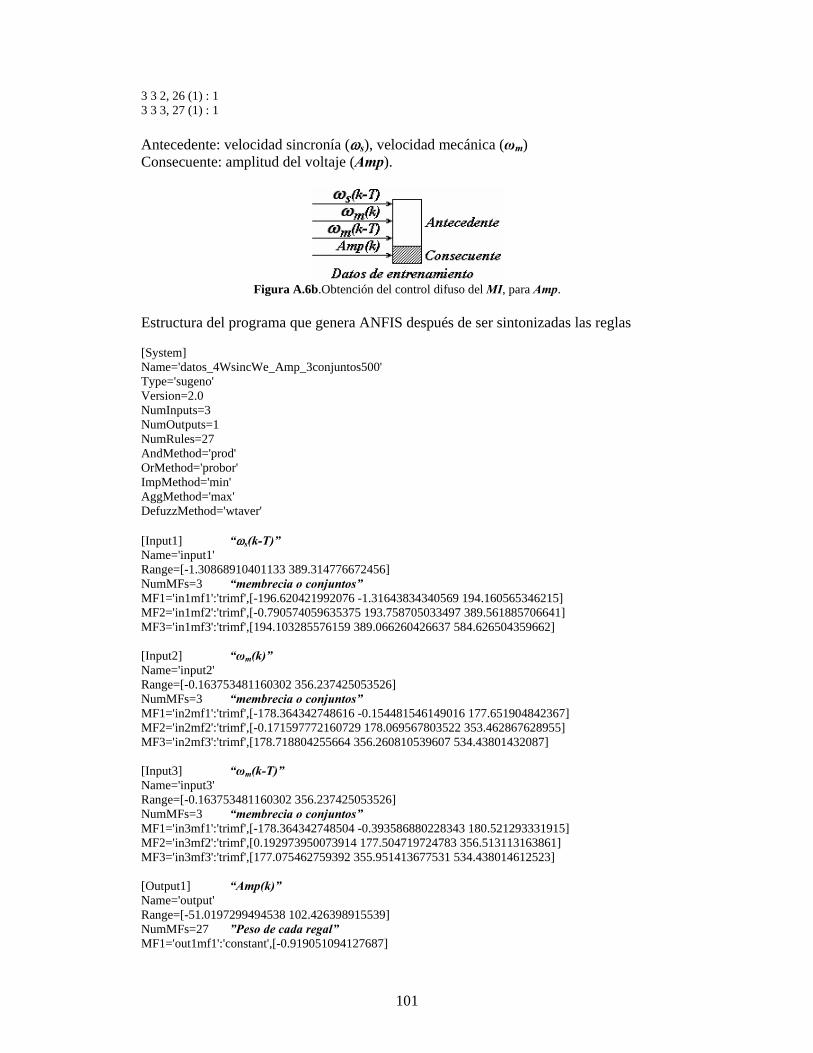
101
3 3 2, 26 (1) : 1 3 3 3, 27 (1) : 1 Antecedente: velocidad sincronía (ωs), velocidad mecánica (ωm) Consecuente: amplitud del voltaje (Amp).
Figura A.6b.Obtención del control difuso del MI, para Amp.
Estructura del programa que genera ANFIS después de ser sintonizadas las reglas [System] Name='datos_4WsincWe_Amp_3conjuntos500' Type='sugeno' Version=2.0 NumInputs=3 NumOutputs=1 NumRules=27 AndMethod='prod' OrMethod='probor' ImpMethod='min' AggMethod='max' DefuzzMethod='wtaver' [Input1] “ωs(k-T)” Name='input1' Range=[-1.30868910401133 389.314776672456] NumMFs=3 “membrecia o conjuntos” MF1='in1mf1':'trimf',[-196.620421992076 -1.31643834340569 194.160565346215] MF2='in1mf2':'trimf',[-0.790574059635375 193.758705033497 389.561885706641] MF3='in1mf3':'trimf',[194.103285576159 389.066260426637 584.626504359662] [Input2] “ωm(k)” Name='input2' Range=[-0.163753481160302 356.237425053526] NumMFs=3 “membrecia o conjuntos” MF1='in2mf1':'trimf',[-178.364342748616 -0.154481546149016 177.651904842367] MF2='in2mf2':'trimf',[-0.171597772160729 178.069567803522 353.462867628955] MF3='in2mf3':'trimf',[178.718804255664 356.260810539607 534.43801432087] [Input3] “ωm(k-T)” Name='input3' Range=[-0.163753481160302 356.237425053526] NumMFs=3 “membrecia o conjuntos” MF1='in3mf1':'trimf',[-178.364342748504 -0.393586880228343 180.521293331915] MF2='in3mf2':'trimf',[0.192973950073914 177.504719724783 356.513113163861] MF3='in3mf3':'trimf',[177.075462759392 355.951413677531 534.438014612523] [Output1] “Amp(k)” Name='output' Range=[-51.0197299494538 102.426398915539] NumMFs=27 ”Peso de cada regal” MF1='out1mf1':'constant',[-0.919051094127687]

102
MF2='out1mf2':'constant',[-222.513552918124] MF3='out1mf3':'constant',[171.497682563124] MF4='out1mf4':'constant',[-16.3823900515785] MF5='out1mf5':'constant',[-257.210671057833] MF6='out1mf6':'constant',[468.218551251127] MF7='out1mf7':'constant',[0] MF8='out1mf8':'constant',[-361.91022096933] MF9='out1mf9':'constant',[-2962.8706462424] MF10='out1mf10':'constant',[272.87661982632] MF11='out1mf11':'constant',[-31.2437364049925] MF12='out1mf12':'constant',[636.515877440035] MF13='out1mf13':'constant',[344.631950791098] MF14='out1mf14':'constant',[29.6037449467305] MF15='out1mf15':'constant',[-345.191298904596] MF16='out1mf16':'constant',[-25.640979896288] MF17='out1mf17':'constant',[196.641315756965] MF18='out1mf18':'constant',[-241.211102603181] MF19='out1mf19':'constant',[0] MF20='out1mf20':'constant',[0] MF21='out1mf21':'constant',[0] MF22='out1mf22':'constant',[370.510570181595] MF23='out1mf23':'constant',[274.02885266524] MF24='out1mf24':'constant',[196.460514829824] MF25='out1mf25':'constant',[10.297738053012] MF26='out1mf26':'constant',[245.413378762941] MF27='out1mf27':'constant',[62.5626803768113] [Rules] “Posibles combinaciones de los conjuntos de entrada y peso del las reglas” [Input1] [Input2] [Input3], [Output1] 1 1 1, 1 (1) : 1 1 1 2, 2 (1) : 1 1 1 3, 3 (1) : 1 1 2 1, 4 (1) : 1 1 2 2, 5 (1) : 1 1 2 3, 6 (1) : 1 1 3 1, 7 (1) : 1 1 3 2, 8 (1) : 1 1 3 3, 9 (1) : 1 2 1 1, 10 (1) : 1 2 1 2, 11 (1) : 1 2 1 3, 12 (1) : 1 2 2 1, 13 (1) : 1 2 2 2, 14 (1) : 1 2 2 3, 15 (1) : 1 2 3 1, 16 (1) : 1 2 3 2, 17 (1) : 1 2 3 3, 18 (1) : 1 3 1 1, 19 (1) : 1 3 1 2, 20 (1) : 1 3 1 3, 21 (1) : 1 3 2 1, 22 (1) : 1 3 2 2, 23 (1) : 1 3 2 3, 24 (1) : 1 3 3 1, 25 (1) : 1 3 3 2, 26 (1) : 1 3 3 3, 27 (1) : 1

103
Antecedente: velocidad referencia (ωref), error (error) Consecuente: par del freno mecánico (TL).
Figura A.6c. Obtención del control difuso del freno mecánico.
Estructura del programa que genera ANFIS después de ser sintonizadas las reglas [System] Name='datos_3Wreferror_TL_3conjuntos500' Type='sugeno' Version=2.0 NumInputs=2 NumOutputs=1 NumRules=9 AndMethod='prod' OrMethod='probor' ImpMethod='min' AggMethod='max' DefuzzMethod='wtaver' [Input1] “ωref(k-T)” Name='input1' Range=[-1.9326762412587e-012 360] NumMFs=3 “membrecia o conjuntos” MF1='in1mf1':'trimf',[-180.000000000003 -0.510604479678457 178.801741253288] MF2='in1mf2':'trimf',[0.735047051179232 179.459763139317 360.028785830716] MF3='in1mf3':'trimf',[179.810964016093 359.971150877341 540.000000000001] [Input2] “error(k-T)” Name='input2' Range=[-22.6588746589579 28.5947092099274] NumMFs=3 “membrecia o conjuntos” MF1='in2mf1':'trimf',[-48.2856641382494 -20.5297978312629 0.258033174481509] MF2='in2mf2':'trimf',[-24.0587174053963 4.69837777905824 28.6095814354031] MF3='in2mf3':'trimf',[2.73263836204067 28.5804090596561 54.2215011441161] [Output1] “TL(k-T)” Name='output' Range=[-11.2118392725537 1.16834879663085] NumMFs=9 “membrecia o conjuntos” MF1='out1mf1':'constant',[-5.26777821535378] MF2='out1mf2':'constant',[-0.0455581536726503] MF3='out1mf3':'constant',[0.150622017942072] MF4='out1mf4':'constant',[0.436912361994095] MF5='out1mf5':'constant',[0.00666082214696857] MF6='out1mf6':'constant',[-0.0125971882072945] MF7='out1mf7':'constant',[-0.24071293721186] MF8='out1mf8':'constant',[-0.057074853655561] MF9='out1mf9':'constant',[0.0355616887471297]

104
[Rules] “Posibles combinaciones de los conjuntos de entrada y peso del las reglas” [Input1] [Input2], [Output1] 1 1, 1 (1) : 1 1 2, 2 (1) : 1 1 3, 3 (1) : 1 2 1, 4 (1) : 1 2 2, 5 (1) : 1 2 3, 6 (1) : 1 3 1, 7 (1) : 1 3 2, 8 (1) : 1 3 3, 9 (1) : 1

105
ANEXO 7 ANÁLISIS NUMÉRICO A7.1. Validación de la simulación en lazo cerrado.
Se analizan 3 periodos durante el trayecto como se muestra en la figura 4.9a del capitulo 4, correspondientes a aceleración, velocidad constante y desaceleración. En las tablas A7.1., A7.2., A7.3., se muestran los valores que toman las variables de interés en cada instante. En la tabla A7.1, las variables son: ωref Velocidad referencia. ωm Velocidad mecánica del sistema (planta). dωm / dt Aceleración mecánica del sistema (planta). ωs Velocidad síncrona. Amp Amplitud del voltaje. En los instantes de tiempo: 6 seg., 16 seg., 26 seg., con control convencional e inteligente.
Tabla A7.1. Variables de velocidad y control segundo 6 16 26 Tiempo ωref 80 160 80 Velocidad de referenciaωm 75.888 159.26 84.76 Control convencional ωm 78.298 160.64 82.838 Control inteligente
dωm/dt 15.581 0.021883 -16.697 Control convencional dωm/dt 15.802 0.038968 -15.537 Control inteligente ωs 84.258 161.21 75.447 Control convencional ωs 88.443 162.08 72.079 Control inteligente
Amp 16.146 10.243 -10.022 Control convencional Amp 16.601 11.271 -8.7952 Control inteligente
A continuación se hace un análisis numérico para comprobar la implementación
de las ecuaciones en Matlab/Simulink®. A7.2. Par del sistema mecánica Se analiza el par electromagnético (Tm) con el par suma (Tsuma) de la planta. En los instantes de tiempo: 6 seg., 16 seg., 26 seg., con control convencional e inteligente. En la tabla A7.2, las variables son: Tm Par electromagnético de la planta, ecuación (2.31). TL Par del freno mecánico. Tbd Par aplicado a la chumacera debido al disco de freno. Tbr Par aplicado a la chumacera debido al rotor. Tbv Par aplicado a la chumacera debido al volante de inercia. Tf Par aplicado a la flecha. Tjd Par aplicado al disco de freno. Tjr Par aplicado al rotor. Tjv Par aplicado al volante de inercia. Se compara el par electromagnético (Tm) con el par (Tsuma) del sistema (planta) donde: Tsuma = Tjr + Tjv + Tjd + Tbr + Tbv + Tbd – TL.

106
Donde: mjr
dT Jdtω
= ; 0m
jvdT Jdtω
= ; 1m
jddT Jdtω
= ; br mT Bω= ; 0bv mT B ω= ; 1bd mT Bω=
Tabla A7.2. Variables de par.
segundo 6 16 26 Tiempo Tm 1.9796 0.06644 -2.055 Control convencional Tm 2.0082 0.06913 -1.9107 Control inteligente TL 0 0 0 Control convencional TL 0 0 0 Control inteligente Tbr 0.0075888 0.015926 0.008476 Control convencional Tbr 0.0078298 0.016064 0.0082838 Control inteligente Tbv 0.022766 0.047777 0.025428 Control convencional Tbv 0.023489 0.048191 0.024851 Control inteligente Tbd 0.00022766 0.00047777 0.00025428 Control convencional Tbd 0.00023489 0.00048191 0.00024851 Control inteligente Tjr 0.028122 3.9497e-005 -0.030136 Control convencional Tjr 0.028521 7.0334e-005 -0.028044 Control inteligente Tjv 1.9211 0.0026982 -2.0587 Control convencional Tjv 1.9484 0.0048048 -1.9158 Control inteligente Tjd 0.0019211 2.6982e-006 -0.0020587 Control convencional Tjd 0.0019484 4.8048e-006 -0.0019158 Control inteligente
Para el instante de tiempo 6:
Tm 1.9796 Control convencionalTm 2.0082 Control inteligente
Tsuma = Tjr + Tjv + Tjd + Tbr + Tbv + Tbd – TL. (1.98172556)=(0.028122)+(1.9211)+(0.0019211)+(0.0075888)+(0.022766)+(0.00022766) – (0) (2.01042309)=( 0.028521)+( 1.9484)+( 0.0019484)+( 0.0078298)+( 0.023489)+( 0.00023489) – (0) Donde la diferencia entre el par electromagnético (Tm) con el par (Tsuma): 0.00212556 -- Control convencional 0.00222309 -- Control inteligente Para el instante de tiempo 16:
Tm 0.06644 Control convencionalTm 0.06913 Control inteligente
Tsuma = Tjr + Tjv + Tjd + Tbr + Tbv + Tbd – TL. (0.067395867)=( 3.9497e-005)+( 0.0026982)+( 0.015926)+( 0.047777)+( 0.00047777)+(0.0004774)+(0) (0.0696168488)=(7.0334e-005)+(0.0048048)+(4.8048e-006)+(0.016064)+(0.048191)+(0.00048191) +(0) Donde la diferencia entre el par electromagnético (Tm) con el par (Tsuma): 0.000955867-- Control convencional 0.0004868488 -- Control inteligente Para el instante de tiempo 26
Tm -2.055 Control convencionalTm -1.9107 Control inteligente
Tsuma = Tjr + Tjv + Tjd + Tbr + Tbv + Tbd – TL. (-2.05673642)=(-0.030136)+(-2.0587)+(-0.0020587)+(0.008476)+(0.025428)+(0.00025428)+(0) (-1.91237649)=(-0.028044)+(-1.9158)+(-0.0019158)+(0.0082838)+(0.024851)+(0.00024851)+(0) Donde la diferencia entre el par electromagnético (Tm) con el par (Tsuma): 0.00173642 -- Control convencional 0.00167649 -- Control inteligente

107
Al hacer la comparación, el error máximo de par es de 0.002 en el segundo 6 de la simulación. A7.3. Potencia del sistema Se analiza la potencia de entrada (Pe) con la potencia suma (Potsuma) del sistema (planta). Se evalúa en los instantes de tiempo: 6 seg., 16 seg., 26 seg., con control convencional e inteligente. En la tabla A7.3, las variables son: Pe Potencia de entrada del sistema (planta), ecuación (2.27) Pre Pérdida de potencia en el cobre del estator, ecuación (2.28) Pmag Pérdida de potencia magnética en el núcleo, ecuación (2.29) Prr Pérdida de potencia en el cobre del rotor, ecuación (2.28) Ps Potencia de salida del sistema (planta), ecuación (2.30)
Tabla A7.3. Variables de potencia segundo 6 16 26 Tiempo
Pe 238.13 16.36 -79.643 Control convencionalPe 254.1 18.203 -69.661 Control inteligente Pre 71.506 5.651 75.343 Control convencionalPre 75.575 7.7788 69.594 Control inteligente
Pmag -0.10903 -0.0017551 0.15301 Control convencionalPmag 3.3589 -0.78895 0.31304 Control inteligente Prr 16.5 0.12996 19.039 Control convencionalPrr 17.926 0.10834 18.708 Control inteligente Ps 150.23 10.581 -174.18 Control convencionalPs 157.24 11.105 -158.28 Control inteligente
Se compara la potencia de entrada (Pe) con la potencia suma (Psuma) donde: Psuma= Pre+Pmag+Prr+Ps Para el instante de tiempo 6
Pe 238.13 Control convencionalPe 254.1 Control inteligente
Psuma= Pre+Pmag+Prr+Ps (238.135097)=(71.506)+(-0.10903)+(16.5)+(150.23) (254.0999)=(75.575)+(3.3589)+(17.926)+(157.24) Encontrándose que la diferencia entre la potencia de entrada (Pe) con potencia suma (Psuma) es: 0.005097 -- Control convencional 0.0001 -- Control inteligente Para el instante de tiempo 16
Pe 16.36 Control convencionalPe 18.203 Control inteligente
Psuma= Pre+Pmag+Prr+Ps (16.3602049)=(5.651)+(-0.0017551)+(0.12996)+(10.581) (18.20319)=(7.7788)+(-0.78895)+(0.10834)+(11.105) La diferencia entre la potencia de entrada (Pe) con potencia suma (Psuma) es:

108
0.00019 -- Control convencional 0.00396 -- Control inteligente Para el instante de tiempo 26
Pe -79.643 Control convencionalPe -69.661 Control inteligente
Psuma= Pre+Pmag+Prr+Ps (- 79.64499)=(75.343)+(0.15301)+(19.039)+(-174.18) (-69.66496)=(69.594)+(0.31304)+(18.708)+(-158.28) Donde la diferencia entre la potencia de entrada (Pe) con potencia suma (Psuma) es: 0.00199 -- Control convencional 0.00396 -- Control inteligente Al hacer la comparación el error máximo es de 0.005 en el segundo 6 de la simulación. Como el control inteligente aplica el mayor esfuerzo de control a la planta, en consecuencia la potencia al arranque es mayor que la planta controlada por control convencional
Se verificó la operación del MI en modo regenerador durante la desaceleración. Esta condición se observa cuando la velocidad síncrona (ωs) es menor a la velocidad mecánica (ωm), y al mismo tiempo la potencia de entrada (Pe) es negativa.

109
ANEXO 8 ANÁLISIS DE POTENCIA Se presenta el comportamiento de la recuperación de energía ante diferentes pendientes descendentes. Se evalúa la energía recuperable como cambio en la energía cinética menos pérdidas de energía que existen en la planta. Las variables que se muestran a continuación son: Pe Potencia de entrada del sistema (planta) Pre Pérdida de potencia en el cobre del estator Prr Pérdida de potencia en el cobre del rotor Pmag Pérdida de potencia magnética en el entrehierro Ps Potencia de salida del sistema (planta) Ee Energía de entrada en el estator, Ere Energía disipada en la resistencia del devanado del estator, Emag Energía disipada por el campo magnetico en el núclucleo, Err Energía disipada en la resistencia del devanado del rotor, Es Energía de salida en el sistema mecánico. Donde :
e eE P dt= ∫ ; re reE P dt= ∫ ; mag magE P dt= ∫ ; rr rrE P dt= ∫ ; s sE P dt= ∫ Para estos resultados de simulación de energía, el par de freno mecánico se deshabilita (TL = 0), se grafica la potencia y la correspondiente energía para cada una de las variables. La figura A8.1 muestra las diferentes pendientes de desaceleracción que fueron manejadas: desaceleración de pendiente -160/5, desaceleración de pendiente -160/10, desaceleración de pendiente -160/15 y desaceleración de pendiente -160/20.
FiguraA8.1. velocidad de referencia (ωref) y velocidad mecánica (ωm) de la planta.
Las figuras A8.1a, A8.1b, A8.1c y A8.d muestran las pérdidas de energía en los
devanados del MI. Se observa claramente que la planta controlada con control inteligente (int) tiene la mayor pérdida de energía en comparación con la planta controlada por el control convencional (con), debido al esfuerzo de control que ejerce sobre la planta para que siga la señal de referencia, como se muestra en las figuras A8.1.

110
FiguraA8.1a. Energía para la velocidad de referencia (ωref) y pendiente de -160/5.

111
FiguraA8.1b. Energía para la velocidad de referencia (ωref) y pendiente de -160/10.

112
FiguraA8.1c. Energía para la velocidad de referencia (ωref) y pendiente de -160/15.

113
FiguraA8.1d. Energía para la velocidad de referencia (ωref) y pendiente de -160/20.

114
Para saber cuanta energía es recuperada durante la desaceleración entonces, a la potencia mecánica (Ps) le son restadas las perdidas de potencia en la resistencia del rotor (Prr), del campo magnético en el núcleo (Pmag) y resistencia en el estator (Pre).
( )( )reg s rr mag reE P P P P dt= − + +∫
FiguraA8.1e. Energía para ωref con pendientees de -160/5, -160/10, -160/15 y -160/20.
La figura A8.1e y la tabla A8.1 muestran la comparación de la energía a diferentes desaceleraciones. La planta controlada con control inteligente al ejercer mayor esfuerzo de control logra un error menor entre la velocidad de referencia y la velocidad mecánica en comparación a la planta controlada con control convencional, en consecuencia sufre mayores pérdidas en la etapa de aceleración. Sin embargo, es más eficiente en la etapa de recuperación, exceptuando pendientes muy negativas, donde emplea un modo motor alternado con el modo generador.
Tabla A8.1. Tabla de energía Energía (Es) Energía (Ereg)Desaceleración
(Joules) (Joules) (con) 1566 455 -160/5(int) 1589 429 (con) 1548 550 -160/10(int) 1571 560 (con) 1529 553 -160/15(int) 1554 574 (con) 1511 546 -160/20(int) 1536 564
Se mostró que, con los parámetros tomados de la tesis de Nandayapa y Hernández [56], la mayor perdida de energía es en los devanados del MI , por lo que es necesario utilizar un motor de inducción más robusto para este tipo de aplicación.

115
REFERENCIAS Libros [1] Canales Ruiz R. y Barrera Rivera R. “Análisis de Sistemas Dinámicos y Control
Automatico”. Editorial Limusa. México. 1980. [2] Christos G. Cassandras Stphane Lafortune. “Introduction to Discrete Event
Systems”. Kluwer Academic Publishers. United States of America. 1999. [3] Stephen J. Chapman. “Máquinas Eléctricas”. Segunda edición. Editorial
McGraw-Hill Interamericana, S. A. Santafé de Bogotá, Colombia. 1991. [4] Luciano Chiang S. “Análisis Dinámicos de Sistemas Mecánicos”. Segunda
edición. Editorial Alfaomega. Chile. 1999. [5] John J. D’azzo, Constantine H. Houpis. “Linear Control System Analysis and
Desing: Conventional and Modern”. Fourth Edition. McGraw-Hill International Editions: Electrical Engineering Series. New York, USA. 1995.
[6] James B. Dabney, Thomas L. Harman. “Mastering Simulink”. Editorial Person
Prentice Hall. Unides States of America. 2004. [7] Delores M. Etter. “Solución de Problemas de Ingeniería con Matlab®”.Segunda
edición. Editorial Prentice Hall. Edo. de México. 1997. [8] A. E. Fitzgerald, Charles Kingsley, Jr., StephN D. Umans. “Máquinas
Eléctricas”. Quinta Edición. Editorial Mc Graw Hill. U.S.A. 1992. [9] John B. Fraleigh, Raymond A. Beauregard. “Álgebra Lineal”. Editorial Addison-
Wesley Iberoamericana, S. A. Wilmington, Delaware, USA. 1989. [10] Venbu Gaurishankar. “Conversión de la Energía Electromecánica”. Editorial
Alfaomega. México, D. F. 1990. [11] Harold W. Gingrich. “Electrical Machinery, Transformers and Control”.
Prentice Hall Editions. USA. 1979. [12] Stanley I. Grossman. “Álgebra Lineal”. Quinta Edición. Editorial McGraw-Hill
Interamericana de México, S. A. De C. V. D. F., México 1994. [13] Norman B. Haaser, Joseph P. LaSalle, Joseph A. Sullivan. “Análisis
Matemático”. Editorial Trillas S. A. De C. V. D. F., México. 1970. [14] William H. Hayt, Jr. “Engineering Electromagnetics”. Fifth Edition. McGraw-
Hill International Editions. USA. 1989.
116
[15] R. C. Hibbeler. “Mecánica de Materiales”. Tercera Edición. Editorial Prentice-Hall, Hispanoamericana, S. A. Edo. de México. 1998.
[16] John E. Hopcroft, Jeffrey D. Ullman. “Introduction to Automata Theory
Languages, and Computation”. Addison-Wesley Publishing Company. United States of America. 1979
[17] Constantine H. Houpis, Gary B. Lamont. “Digital Control Systems Theory,
Hardware, Software”. Second Edition. McGraw-Hill Inc. Edition. USA. 1992. [18] Alberto Isidori. “Nonlinear Control Systems”. Third Edition. Springer – Verlag
Berlin Heidelberg Edition. New York. 1995. [19] Jyh Shing Roger Jang, Chuen Tsai Sun and Eiji Misutani “Neuro-Fuzzy and Soft
Computing: A Computational Approach to Learning and Machine Intelligence”. Prentice Hall Edition. 1997.
[20] Dean Kelley. “Teoría de Autómatas y Lenguajes Formales”. Editorial Prentice
Hall. Madrid, España. 1995. [21] John D. Kraus. “Electromagnetics”. Third Edition. McGraw-Hill Edition. Inc. U.
S. A. 1984. [22] Paul C. Krause. “Analysis of Electric Machinery”. McGraw-Hill Book
Company. 1987. [23] Benjamin C. Kuo. “Sistemas de Control Automático”. Séptima Edición. Editorial
Prentice Hall Inc. Mexico 1995. [24] Leander W. Matsch. “Electromagnetic and Electromechanical Machines”.
International Textbook Company. USA. 1972. [25] Robert L. Mott, P. E. “Diseño de Elementos de Máquinas”. Segunda Edición.
Editorial Prentice Hall Hispanoamericana, S. A. Macmillan Inc., USA. 1992 [26] Shoichiro Nakamura. “Análisis Numérico y Visualización Gráfica con
Matlab®”.Editorial Prentice-Hall Hispanoamericana, S. A. Edo. de México. 1996. [27] Rober L. Norton. “Diseño de Máquinas”.Editorial Prentice Hall
Hispanoamericana, S. A. México. 1999. [28] Donald W. Novotny, and Tom A. Lipo. “Vector Control and Dynamic of AC
Drives”. Oxford Science Publications, Oxford. (1996). [29] Ogata, Katsuhiko. “Dinámica de Sistemas”. Editoral Prentice-Hall. México.
1987. [30] Ogata, Katsuhiko. “Sistemas de Control en Tiempo Discreto”. Editoral Person.
México. 1996.

117
[31] Chee-Mung Ong. “Dynamic Simulation of Electric Machinery. Using”. Matlab/Simulink©. Indiana. Prentice Hall PTR. 1998.
[32] Romeo Ortega, Antonio Loría, Per Johan Nicklasson, Hebertt Sira Ramírez.
“Passivity Based Control of Euler–Lagrange Systems Mechanical, Electrical and Electromechanical Applications”. Springer – Verlag London Berlin Herdelberg Edition. Great Britain. 1998.
[33] Muhammad H. Rashid. “Electrónica de Potencia Circuitos, Dispositivos y
Aplicaciones”, 2a Edición . Editorial Prentice-Hall Hispanoamericana. México D. F. 1995.
[34] Robert Resnick, David Halliday. “Física”. Compañía Editorial Continental S. A.
De C. V. D. F. México. 1980. [35] Francis W. Sears, Mark W. Zemansky, Hugh D. Young. “Física Universitaria”.
Sexta Edición. D. F. México. 1986. [36] Shearer, J. Lowen. “Dynamic Modeling and Control of Engineering Systems”.
Editorial MacMillan. New York. 1990. [37] Joseph E. Shigley, Charles R. Mischke. “Diseño en Ingeniería Mecánica”. Sexta
edición. Editorial Mc Graw Hill. D.F. México. 2002. [38] Jean-Jacques E. Slotine, Weiping Li. “Applied Nonlineal Control”. Prentice-Hall.
Inc. A Division of Simon & Schuster Englewood Cliffs. New Jersey, United States of America. 1991.
[39] William D. Stevenson, Jr. “Elements of Power System Analysis”. Fourth Edition.
McGraw-Hill International Editions. Electrical & Electronic Engineering Series. North Carolina State, USA. 1982.
[40] Eronini Umez-Eronini. “Dinámica de Sistemas y Control”. Editorial Thomson
Learning. México, D. F. 2001. [41] Peter Vas. “Vector Control of AC Machines”. Clarendon Press-Oxford. 1990 [42] Wang L. X. “Fuzzy Systems as Nonlinear Dynamic System Identifiers” part I:
design. Departement of Electrical Engineering and Computer Science, University of California at Berkeley, Berkeley. CA 94720. 1992.
[43] H. Wayne Beaty, James L. Kirtley, Jr. “Manual del Motor Eléctrico”. Editorial
Mc Graw Hill. México, D.F. 1998. [44] J. Wesley Hines. “Fuzzy and Neural Approaches in Engineering MATLAB
Supplement”. Simon Haykin, Series Editor. New York, NY. 1997. [45] Theodore Wildi. “Electrical Machines, Drives and Power Systems”, Fourth
Edition, Prentice Hall, Inc., 2000.
118
Tesis [46] Manuel Adam Medina. “Realización práctica de un control de posición con
acoplamiento directo utilizando un motor trifásico de inducción”. (Maestría en Ingeniería en Electrónica, Cuernavaca, Morelos, Cenidet, 1995).
[47] Rodolfo Castillo Romero, “Sintonización de controladores difusos basada en el
método de gradiente descendente”, Tesis Cenidet mayo de1999, Cuernavaca, Morelos.
[48] Gerardo Cortés Lozano. “Control robusto de motores de inducción utilizando la
técnica de rediseño de Lyapunov”. (Maestría en Ingeniería en Electrónica), Cuernavaca, Morelos, Cenidet, Diciembre 2002.
[49] Mirian Cuevas Cuevas. “Control vectorial de un motor de inducción doble
alimentación (MIDA)”. (Maestría en Ingeniería en Electrónica), Cuernavaca, Morelos, Cenidet, Junio 2003.
[50] Miguel Angel Duran Fonseca. “Diseño de un controlador no lineal basado en
pasividad de un motor síncrono”. (Maestría en Ingeniería en Electrónica), Cuernavaca, Morelos, Cenidet, Enero 2004.
[51] Rodolfo A. Echavarria Solis. “Diseño e implementación de un accionador de
motor de corriente alterna trifásico operando en régimen permanente”. (Maestría en Ingeniería en Electrónica, Tesis Cenidet. Cuernavaca, Morelos. 1995).
[52] Carlos Alfonso Gámez Carrillo. “Construcción automática de reglas en
razonamiento inductivo difuso”. Tesis de Maestría, Cenidet. Cuernavaca, Morelos. Diciembre de 1998.
[53] Gerardo Vicente Guerrero Ramírez. “Modelado y simulación de un sistema
impulsor de motores trifásicos de inducción”.Tesis de Maestría. Junio de 1994. [54] José Juan Hernández Mora, “Implementación de una red neuronal para el
control de un brazo robot articulado”, Tesis de Maestría en Ciencias en Ciencias Computacionales, Cuernavaca, Febrero de 2003.
[55] Miguel Ángel Méndez Bolio. “Controladores de motores de inducción: un
análisis comparativo”. Tesis de Maestría. Cenidet. Cuernavaca Morelos. Abril 2001.
[56] Manuel de Jesús Nandayapa Alfaro, Agustín Alejandro Hernández García.
"Banco de pruebas para sistemas de propulsión eléctrica con regeneración de energía", Tesis Cenidet. Cuernavaca, Morelos. Enero de 2003.
[57] Martha Alicia Rocha Sánchez, “Reconocimiento de patrones de fallas en
generadores eléctricos empleando redes neuronales artificiales”, Tesis de Maestría Ciencias Computacionales, CENIDET, Cuernavaca, en Morelos, Marzo de 1999.

119
[58] Jose Antonio Ruz Hernandez. “Sintonización optima de un controlador difuso
para el calentamiento y presurización del generador de vapor de una unidad termoeléctrica”. Tesis de Maestría en Ingeniería de Control. Facultad de Ingeniería. Universidad Autónoma del Carmen. Ciudad del Carmen Campeche. Mayo de 2001.
Articulos [59] Pedro Abuin Parga, Manuel Cid Fortes, Marco Coppa Pérez, Luis Domínguez
González, Ignacio Gutiérrez Santaló, “SISTEMAS A.B.S”, Escuela Superior de Ingenieros Industriales, Universidad de Navarra, San Sebastián, Noviembre de 2000.
[60] Barsali, S.; Ceraolo, M.; Possenti, A.; “Techniques to Control the Electricity
Generation in a Series Hybrid Electrical Vehicle”, IEEE Trans.on Energy Conversion, Vol: 17, Jun 2002, pp: 260 –266.
[61] Carles Batlle, Arnau D`oria-Cerezo and Romeo Ortega. “Power Flow Control of
a Doubly–Fed Induction Machine Coupled to a Flywheel”. Department of Applied Mathematics IV, UPC. EPSEVG, Vilanova i la Geltr´u, Spain. Institute of Industrial and Control Engineering, UPC . Barcelona, Spain. Lab. des Signaux et Syst`emes CNRS-SUPELEC, France. 2004 07 May 2004.
[62] S. R. Cikanek, K. E. Bailey. “Regenerative braking system for a hybrid electric
vehicle”. Ford Res. Lab., Dearborn, MI, USA. American Control Conference, 2002. Proceedings of the 2002. May 2002. Volume: 4 . pp: 3129 – 3134.
[63] C. C. Chan. “Present Status and Future Trends of Electric Vehicles”. IEEE 2nd
International Conference on Advances in Power System Control. Operation and Management, Hong Kong. December 1993.
[64] C. C. Chan, K. T. Chau. “An Overview of Power Electronics in Electric
Vehicles”. IEEE Transactions on Industrial Electronics. Vol. No. 44. February 1997.
[65] C. C. Chan. “The State of the Art of Electric and Hybrid Vehicles”. IEEE
proceeding of the IEEE, Vol. 90, No. 2, February 2002. [66] Juan W. Dixon, Micah Ortúzar and Eduardo Wiechmann. “Regenerative Braking
for an Electric Vehicle Using Ultracapacitorsand a Buck-Boost Converter”. Department of Electrical Engineering Catholic University of Chile and University of Concepción. 2002.
[67] Elkan, C. Berenji, H.R. Chandrasekaran, B. de Silva, C.J.S. Attikiouzel, Y.
Dubois, D. Prade, H. Smets, P. Freksa, C. Garcia, O.N. Klir, Turksen, B. Vadiee, N. Jamshidi, M. Pei-Zhuang Wang Sie-Keng Tan G.J. Bo Yuan Mamdani, E.H. Pelletier, F.J. Ruspini, E.H. Shaohua Tan Yager, R.R. Zadeh, L.A. “The paradoxical success of fuzzy logic”. Expert, IEEE [see also IEEE Intelligent Systems and Their Applications]. Dept. of Comput. Sci. & Eng.,
120
California Univ., San Diego, La Jolla, CA, USA. Aug 1994 Volume: 9, pp. 3 – 49.
[68] Akegi Hirofumi. “Control and Performance of a Doubly-fed Induction Machines
Intended for a Flywheel Energy Storage System”. IEEE Transactions on Power Electronics, Vol. 17, No. 1, 2002.
[69] Jang, J.-S. R. "ANFIS: Adaptive-Network-based Fuzzy Inference Systems".
IEEE Transactions on Systems, Man, and Cybernetics, Vol. 23, No. 3, pp. 665-685, May 1993.
[70] Jang, J.-S. R. and N. Gulley. "Gain scheduling based fuzzy controller design".
Proc. of the International Joint Conference of the North American Fuzzy Information Processing Society Biannual Conference, the Industrial Fuzzy Control and Intelligent Systems Conference, and the NASA Joint Technology Workshop on Neural Networks and Fuzzy Logic. San Antonio. Texas. Dec. 1994.
[71] Jang, J.-S.R. Chuen-Tsai Sun. “Neuro-fuzzy modeling and control”. Proceedings
of the IEEE. The MathWorks Inc., Natick, MA, USA. March 1995. Volume: 83, Issue: 3. pp. 378 – 406.
[72] Kang, G. Lee, W. Sugeno, M. “Design of TSK fuzzy controller based on TSK
fuzzy model using pole placement”. Fuzzy Systems Proceedings, 1998. IEEE World Congress on Computational Intelligence., The 1998 IEEE International Conference on. Pukyong Nat. Univ., Pusan, South Korea. 4-9 May 1998. Volume: 1. pp. 246 – 251.
[73] Kang, G. Lee, W. Sugeno, M. “Stability analysis of TSK fuzzy systems”. Fuzzy
Systems Proceedings, 1998. IEEE World Congress on Computational Intelligence. The 1998 IEEE International Conference on. Pukyong Nat. Univ. Pusan, South Korea. 4-9 May 1998. Volume: 1. pp: 555 – 560.
[74] Koyanagi F., Uriu Y., “A Strategy of Load Leveling by Charging and
Discharging Time Control of Electric Vehicles”. IEEE Trans. on Power Systems, Vol: 13, Aug 1998, pp: 1179 -1184.
[75] Alfredo Muñoz-García. Thomas A. Lipo, and Donald W. Novotny. “A New
Induction Motor V/f Control Method Capable of High-Performance Regulation at Low Speeds”. IEEE Transactions on Industry applications. Vol. 34. No. 4. pp. 813-821. July / August 1998.
[76] Nakai, H. Ohtani, H. Satoh, E. Inaguma, Y. “Development and Testing of the
Torque Control for the Permanent-Magnet Synchronous Motor”. Industrial Electronics, IEEE Transactions. Volume: 52 , Issue: 3 . June 2005, pp: 800 – 806.
[77] Kumpati S. Narendra and Kannan, Parthasarathy, “Identification and Control
of Dynamical Systems Using Neural Networks”. IEEE Transactions on neural networks. Vol 1. No. 1. March 1990 pp. 4-27.

121
[78] Kumpati S. Narendra and Kannan, Parthasarathy, “Gradient Methods for the Optimization of Dynamical Systems Containing Neural Networks”. IEEE Transactions on neural networks. Vol 2. No. 2. March 1991 pp. 252-262.
[79] Hiroyoshi Nomura and Isao Hayashi and Noboru Wakami. “A Learning Method
of Fuzzy Inference Rules by Descent Method”, Proceedings IEEE International Conference on Fuzzy Systems, San Diego, California, March 1992, pp. 203-210.
[80] Ehsani, M., Rahmann, K.M.; Toliyat, H.A, “Propulsion System Design of Electric
Vehicles”, Proc. of the Industrial Electronics, Control, and Instrumentation-IECON, Vol: 1, 5-10 Aug 1996, pp: 7 - 13.
[81] Ehsani M. Rahman K.M.. Toliyat H.A.. “Propulsion System Design of Electric
and Hybrid Vehicles”. IEEE Trans. on Industrial Electronics, Vol: 44, Feb 1997, pp: 19 –27
[82] José Ruiz Ascencio, Rodolfo Castillo Romero, “Construcción Automática de
Aproximadotes Difusos Mediante la Sintonización de sus Parámetros Utilizando el Método Gradiente Descendente”. Memoria del Simposium Internacional en Computación CIC’98. Instituto Politécnico Nacional IPN. México. D. F. noviembre de 1998. pp. 418-425
[83] José Ruiz Ascencio, Rodolfo Castillo Romero. “Self-Tuning Fuzzy Identification
and Control Using a Hybrid State Transition Kernel”, CIMCA’99. International Conference on Computational Intelligence for Modelling. Viena, Austria, 17 a 19 febrero de 1999. Aparece en Concurrent Engineering Series, Vol. 55, pp. 204-209, IOS Press 1999.
[84] Tankeh, A. Mamdani, E.H. “Convex fuzzy controller: neuro-fuzzy and convex
optimization”. Fuzzy Systems, 1997., Proceedings of the Sixth IEEE International Conference on. Dept. Electr. Eng., Imperial Coll., London, UK. 1-5 July 1997. Volume: 2. pp. 1133 – 1139.
[85] M. S. Vicatos. “Steady State Análisis of a Doubly-Fed Induction Generador
Under Synchronous Operation”. IEEE Transactions on Energy Conversion. Vol 4, No. 3. pp. 495-501. March 1989.
[86] M. S. Vicatos. “Transient State Analysis of a Doubly-Fed Induction Generador
Under Three Phase Short Circuit”. IEEE Transactions on Energy Conversion. Vol 6, No. 1. pp. 61-75. March 1991.
[87] M. S. Vicatos “Doubly-Fed Induction Motor Differential Cascade Part I -
Configuration and Analysis in the Steady State, and Part II – Verification by Test”. IEEE Transactions on Energy Conversion. Vol 14, No. 3. pp. 361-372. September 1999.
[88] Wang. L. X. “Stable Adaptive Fuzzy Control of Nonlinear Systems” IEEE Trans,
on Fuzzy Systems, to be published. 1993.

122
[89] Frank Wicks, Kyle Donnelly. “Modeling Regenerative Braking and Storage for Vehicles”. Mechanical Engineering Department. Steinmetz Hall. Union College. Schenectady, New York 12308, pp. 2030- 2035. Aug. 1997
[90] Wicks, F. Maleszweski, J. Wright, C. Zarybnicky, J. “Analysis of compressed
air regenerative braking and a thermally enhanced option”. Energy Conversion Engineering Conference, IECEC '02. 2002 37th Intersociety. Union Coll., Schenectady, NY, USA. July 2004. Pp. 406 – 411
[91] Xiaoling He; Hodgson, J.W. “Modeling and simulation for hybrid electric
vehicles. II. Simulation”. Intelligent Transportation Systems, IEEE Transactions on Volume: 3 Issue: 4 Dec 2002 pp: 244- 251.
[92] Zadeh, L.A., "Fuzzy sets," Information and Control, Vol. 8, pp. 338-353, 1965. [92] Jan C. Willems. “Dissipative dynamical systems – Part I: General Theory”.
Archive for Rational Mechanics and Analysis. Vol. 45, 1972, pp 321-351. • Max Black, “Vagueness: An Exercise in logical Analysis”, Philosophy of Science
4(1937): 427-455. • Carl G. Hempel, “Vgueness an Logic , “Philosophy of Science 6 (1939): 163-180. • Bertrand Russell. Vagueness (1923). KS 61-68 • Max Black. Vagueness: an exercise in logical analysis (1937). KS 69-81 • Carl G. Hempel. Vagueness and logic (1939). KS 82-84 • Kit Fine. Vagueness, truth, and logic (1975). KS 119-150 • Relevant Reading: • "Vagueness," by Bertrand Russell, in The Australasian Journal of Psychology and
Philosophy, I, 2 (June 1923): 85-86. • "Vagueness: an exercise in logical analysis" by Max Black in Philosophy of Science,
4: pp. 427-455; reprinted in Black's Language and philsophy, Ithaca, N.Y., Cornell University Press, 1949
• "Excluded Middle", Hugh Chandler, The Journal of Philosophy, Vol. LXIV, No. 24, Dec. 21, 1967, pp. 807-814.
• "Logical Continuity", Hugh Chandler, Notre Dame Journal of Formal Logic, 8, 4. "Borderline Logic", by David Sanford, in the American Philosophical Quarterly, 12 (1975), pp. 29-39.
• "Can there be vague objects?" by M.G.J. Evans, Analysis 38: 208; reprinted in Evans' Collected Papers, Oxford, Clarendon Press, 1985.
• "Vagueness: Welcome to the Quicksand", by Michael Tye, in Vagueness, Spindel Conference 1994, Terry Horgan, Ed. Vol. XXXIII, Supplement, The Southern Journal of Philosophy, pp. 1-22.
• Vagueness, Timothy Williamson, Routledge, London, 1994.


















