
Sensores de imagen
41
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 1 de 41 MANUAL BÁSICO DE TECNOLOGÍA AUDIOVISUAL Antonio Cuevas [email protected] Tema 28 SENSORES DE IMAGEN TECNOLOGÍA 28.1 Transferencia de la información en los sensores CCD 28.1.1 FFT CCD (Full Frame Transfer – Transferencia de cuadro completo) 28.1.2 FT CCD (Frame Transfer - Transferencia de cuadro) 28.1.3 IT CCD (Interline transfer – Transferencia entre líneas) 28.1.4 FIT CCD (Frame-Interline Transfer - Transferencia interlineal de cuadro) 28.2 Transferencia de la información en los sensores CMOS 28.3 Parámetros básicos del sensor de imagen 28.3.1 Tamaño de los píxeles 28.3.2 Factor de relleno (fill factor) 28.3.3 Eficiencia cuántica (quantum eficiency) 28.3.4 Corriente de oscuridad. 28.3.5 El ruido 28.3.6 Sensibilidad y ruido en la imagen digital 28.3.7 Capacidad límite de almacenamiento (Full Well Capacity) 28.4 Píxeles defectuosos 28.4.1 Pìxel muerto (Dead pixel) 28.4.2 Píxel pegado (Stuck pixel) 28.4.3 Píxel caliente (Hot pixel) 28.5 Defectos típicos en la imagen obtenida por los sensores electrónicos 28.5.1 Aliasing 28.5.2 Smear (mancha vertical) 28.5.3 Muaré 28.6 La obturación en vídeo
-
Upload
centro-costarricense-de-produccion-cinematografica -
Category
Documents
-
view
253 -
download
2
description
Manual de Tecnología Audiovisual de Antonio Cuevas.
Transcript of Sensores de imagen

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 1 de 41
MANUAL BÁSICO DE TECNOLOGÍA AUDIOVISUAL Antonio Cuevas [email protected] Tema 28 SENSORES DE IMAGEN TECNOLOGÍA 28.1 Transferencia de la información en los sensores CCD
28.1.1 FFT CCD (Full Frame Transfer – Transferencia de cuadro completo)
28.1.2 FT CCD (Frame Transfer - Transferencia de cuadro)
28.1.3 IT CCD (Interline transfer – Transferencia entre líneas)
28.1.4 FIT CCD (Frame-Interline Transfer - Transferencia interlineal de cuadro)
28.2 Transferencia de la información en los sensores CMOS
28.3 Parámetros básicos del sensor de imagen
28.3.1 Tamaño de los píxeles
28.3.2 Factor de relleno (fill factor)
28.3.3 Eficiencia cuántica (quantum eficiency)
28.3.4 Corriente de oscuridad.
28.3.5 El ruido
28.3.6 Sensibilidad y ruido en la imagen digital
28.3.7 Capacidad límite de almacenamiento (Full Well Capacity)
28.4 Píxeles defectuosos
28.4.1 Pìxel muerto (Dead pixel)
28.4.2 Píxel pegado (Stuck pixel)
28.4.3 Píxel caliente (Hot pixel)
28.5 Defectos típicos en la imagen obtenida por los sensores electrónicos
28.5.1 Aliasing
28.5.2 Smear (mancha vertical)
28.5.3 Muaré
28.6 La obturación en vídeo

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 2 de 41
Sabemos que los sensores se componen de tres capas: una superior para transformar la energía luminosa (fotones) en energía eléctrica (electrones), una intermedia que resulta estanca a la luz, y la inferior que actúa como “almacén” y a la que suele denominarse sustrato. Como vimos en el tema anterior, esta pequeña estructura no solo almacena los fotones en forma de carga eléctrica sino que también dispone de la capacidad de transferir los electrones originados al píxel adyacente. De ahí su denominación CCD, Charge Coupled Device, “dispositivos de carga (eléctrica) interconectada” en traducción literal o “dispositivos de transferencia de carga” en traducción más acorde con la función que desempeñan. Sobre los píxeles del sensor se proyecta la imagen óptica enfocada del sujeto que estamos registrando. Cada píxel convertirá la luz que incide sobre él en un pequeño voltaje que será mayor o menor en función de la intensidad lumínica (el número de fotones convertidos en electrones). Las ilustraciones explican el procedimiento. En la de la izquierda, los valores numéricos representan, por así decirlo, distintas cantidades de fotones capturados y la corriente eléctrica proporcional generada. Cuando el tiempo de exposición ha terminado, podríamos representar el sensor como resulta en la figura de la derecha, con diferentes números de electrones en cada píxel. El paso siguiente es transferir de forma ordenada los electrones almacenados hasta un amplificador (la señal obtenida es tan débil que es preciso amplificarla) el cual convierte la carga acumulada en cada píxel en una tensión eléctrica ahora manejable. Acto seguido, la misión del sensor CCD es leer secuencialmente (en orden exacto, un píxel tras otro) estos valores que son pequeños voltajes analógicos, y convertirlos en información digital, de lo cual se encarga el convertidor analógico-digital (dispositivo del que carecen los CMOS). Los sensores CCD tienen una estructura matricial, es decir, sus elementos (píxeles) están alineados en filas y columnas como se muestra en la imagen de la derecha en la página siguiente, de modo que puede capturarse toda la imagen de forma simultánea (Frame Global Shutter). El grupo óptico se encarga de formar la imagen sobre la superficie del CCD de manera que todos los elementos de la
TRANSFERENCIA DE INFORMACIÓN EN LOS SENSORES CCD

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 3 de 41
imagen son adquiridos (excitados) a la vez. Tras ser capturada así la imagen, se efectúa la lectura de la información desplazando las cargas de cada línea del sensor hacia la salida. Por el contrario, los CMOS capturan la imagen una línea tras otra (Rolling Shutter), mientras los objetos grabados que se mueven rápido se siguen moviendo, lo que origina una distorsión en el sentido del movimiento, como veremos enseguida. Hay varias formas de leer la imagen capturada por un CCD según la forma en que realicen esa indispensable transferencia de la información desde los píxeles hasta el interior de la cámara (al convertidor analógico-digital).
Son los CCD de arquitectura más simple. Descargan directamente la imagen a través del registro de lectura una línea tras otra en forma secuencial. La lectura es relativamente lenta, y para evitar que durante la misma los píxeles sigan recibiendo luz, el sistema debe incorporar un obturador mecánico, que además proporcionará control sobre la exposición. Lo incorporan la mayoría de las cámaras fotográficas digitales, así como telescopios, microscopios, etc.
El área completa del CCD está disponible para recibir los fotones durante el tiempo de exposición por lo que su sensibilidad es alta. El factor de relleno de los CCD tipo Full Frame Transfer es muy alto ya que casi toda su superficie se dedica a la captación de la luz (factor de relleno es el porcentaje del área de píxel sensible a la luz) lo cual facilita una alta resolución en la captación de imágenes fijas. Su uso en
FFT (Full Frame Transfer – Transferencia de cuadro completo)
Olimpus E-300

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 4 de 41
vídeo es más problemático por la dificultad de incorporar un obturador mecánico en el mínimo y abarrotado espacio (debido al divisor de haz) entre el grupo óptico y los sensores. Sin embargo, algunas cámaras de cinematografía digital (Arri D-20 y D-21, Dalsa Origin y Evolution, Viper) utilizan obturador mecánico lo que de paso posibilita un visor óptico (no electrónico). La ya obsoleta réflex digital de ocho megapíxeles <1> Olympus E-300 equipada de Full Frame Transfer CCD (FFT CCD), asegura que se graben la mayor cantidad posible de datos de la imagen (hoy se logran más de 22 megapíxeles en ciertos CCD fabricados por Kodak). A la derecha en la página anterior, su CCD, también
fabricado por Kodak, bajo la denominación KAF-5101CE. Otros fabricantes de este tipo de chips son Texas Instruments, Thomson CSF, Philips, EEV, EG&G, etc. Lo interesante de la vieja Olympus E-300 es que fue pionera en la utilización de un peculiar filtro limpiador situado delante del CCD y detrás del obturador mecánico. Cada vez que se enciende la cámara, en menos de 200 milisegundos, el filtro utiliza vibraciones supersónicas para sacudir el polvo que se adhiere al CCD. Luego, ese polvo es atraído electrostáticamente hacia un depósito (una tira de material adhesivo específico) situado en la parte inferior donde es almacenado. El depósito tiene una capacidad suficiente para 10 años.
http://www.microscopyu.com/tutorials/java/digitalimaging/ccd/fullframe/index.html
FFT (Full Frame Transfer)Transferencia de cuadro completo
- El diseño más simple (cámaras fotográficas).
- Descargan directamente a través del registro de lectura una línea tras otra en forma secuencial.
- Lectura “lenta”.
- Para evitar que durante la lectura los píxeles sigan recibiendo luz, el sistema incorpora un obturador mecánico.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 5 de 41
<1> Ocho megapíxeles no es hoy una cifra muy alta. No obstante puede ser, para algunos, mucha resolución; para otros no tanta. El número de megapíxeles es, sin duda, uno de los reclamos más utilizado por los vendedores de cámaras digitales. El número de megapíxeles que se necesita en una cámara depende directamente de la calidad y el tamaño de foto final impresa que se desee. La calidad de la foto depende de la densidad de píxeles por pulgada (1 pulgada = 2,54cm). Para una calidad profesional se necesitan 300 píxeles por pulgada (300ppi). Para una calidad buena, 200ppi, y para una calidad aceptable, 150 ppi. Respecto al tamaño, no es lo mismo imprimir en 10x15cm (el tamaño pequeño de fotos de toda la vida) que en tamaño folio o Din A4. Combinando lo anterior, esta tabla nos da una idea de los megapíxeles que se necesitan en función del tamaño y la calidad deseados. A la vista de estos datos, con una cámara de unos 4Mp, el aficionado medio tiene cubiertas las posibilidades más frecuentes. En muchas descripciones técnicas, los fabricantes distinguen entre dos cifras de megapíxeles: Los megapíxeles totales y los megapíxeles efectivos. La diferencia entre ambos números no suele ser muy grande. Los megapíxeles efectivos son los píxeles que tendrá en realidad la imagen y los totales es la suma de los efectivos más otros píxeles encargados de diversos cálculos como ajuste de colores o eliminación de ruidos. La cifra importante es, lógicamente, la de los megapíxeles efectivos.
Tamaño Calidad Megapíxeles 10 x 15cm Profesional (300ppi) 2,1Mp o más 10 x 15cm Buena (200ppi) 1,0Mp o más 10 x 15cm Aceptable (150ppi) 0,6Mp o más 13 x 18cm Profesional (300ppi) 3,3Mp o más 13 x 18cm Buena (200ppi) 1,5Mp o más 13 x 18cm Aceptable (150ppi) 0,9Mp o más 20 x 30cm Profesional (300ppi) 8,4Mp o más 20 x 30cm Buena (200ppi) 3,8Mp o más 20 x 30cm Aceptable (150ppi) 2,1Mp o más
- Sensibilidad: alta
- Factor de relleno: muy alto
- Resolución: alta
- Arquitectura típica de cámaras para registrar solo imágenes fijas(normalmente utilizan un obturador mecánico)
FFT (Full Frame Transfer)Transferencia de cuadro completo
Nikon D3x: 24,5 Megapíxeles, $8.000 (solo cámara)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 6 de 41
Históricamente, fue el primer sistema aplicado a cámaras de vídeo. Los CCD tipo Frame Transfer están formados por dos áreas, una sensible a la luz, otra de almacenamiento. Los CCD de transferencia de cuadro siguen siendo hoy utilizados en ciertas cámaras de videoaficionado. Conceptualmente, son parecidos a los FFT con
la diferencia de que solo la mitad de la estructura del CCD está expuesta a la luz, mientras que la otra mitad está protegida de la misma, normalmente mediante una máscara de material opaco. La idea básica de su funcionamiento consiste en adquirir la imagen utilizando la superficie expuesta a la luz y, una vez adquirida, desplazar las cargas rápidamente (500 microsegundos o menos) y en paralelo hacia la zona protegida de la luz. Con ello es posible realizar los procesos de adquisición y lectura de los datos de forma simultánea e independiente y sin que sea necesario un obturador mecánico ya que la imagen adquirida está protegida de la luz cuando se realiza su conversión a señal de vídeo.
FT (Frame Transfer - Transferencia de cuadro)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 7 de 41
En las matrices de este tipo de chips simplemente se duplica el número de píxeles del chip para realizar una transferencia rápida de la zona de imagen (zona sensible) a una zona vacía y protegida de la luz denominada zona de memoria (o almacenamiento) para inmediatamente después efectuar desde allí una transferencia normal al registro de lectura (ilustración de la página anterior). La desventaja principal de los FT estriba no tanto en el coste (se requiere un área doble) sino en el hecho de que solo la mitad de ella se utilizará para formar imagen (baja resolución). Esto los hace inadecuados para las cámaras de vídeo de cierta calidad. Eso sí, resultan menos sensibles al smear, artefacto del que hablaremos enseguida.
Existe una variante del diseño FT que es la llamada Sensores de transferencia de cuadro divididos (Split Frame Transfer CCD). Esta arquitectura es similar a la de transferencia de cuadro convencional, con la salvedad de que la parte de almacenamiento está dividida en dos secciones (superior e inferior). La parte central del CCD es la que queda expuesta a la luz. Una vez capturada la imagen, su transferencia a las regiones de almacenamiento se realiza simultáneamente, la mitad superior hacia la mitad superior y la inferior hacia la inferior. Esta estrategia reduce el efecto smear del sensor ya que el tiempo de desplazamiento se reduce a la mitad. No obstante el diseño del CCD se complica ya que deben incorporarse dos registros de desplazamiento (sensores de lectura), uno en cada mitad.
CCD modelo TC245 tipo Frame Transfer fabricado por Texas Instruments

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 8 de 41
CCD modelo TC245 tipo Frame Transfer fabricado por Texas Instruments
- Mayor coste: se requiere doble área.
- Menor resolución: solo la mitad del sensor se utiliza para formar imagen.
- Inadecuados para cámaras de vídeo de cierta calidad.
- Menos sensibles al efecto smear.
1.- Adquiere la imagen utilizando la superficie expuesta a la luz. <
2.- Una vez adquirida, desplazalas cargas rápidamente (500 microsegundos o menos) y en paralelo hacia la zona protegida de la luz. >
3.- Lectura secuencial. >
- Es posible realizar los procesos de adquisición y lectura de los datos de forma simultánea e independiente.
- No es necesario un obturador mecánico (la imagen adquirida está protegida de la luz)
FT (Frame Transfer) - Transferencia de cuadro

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 9 de 41
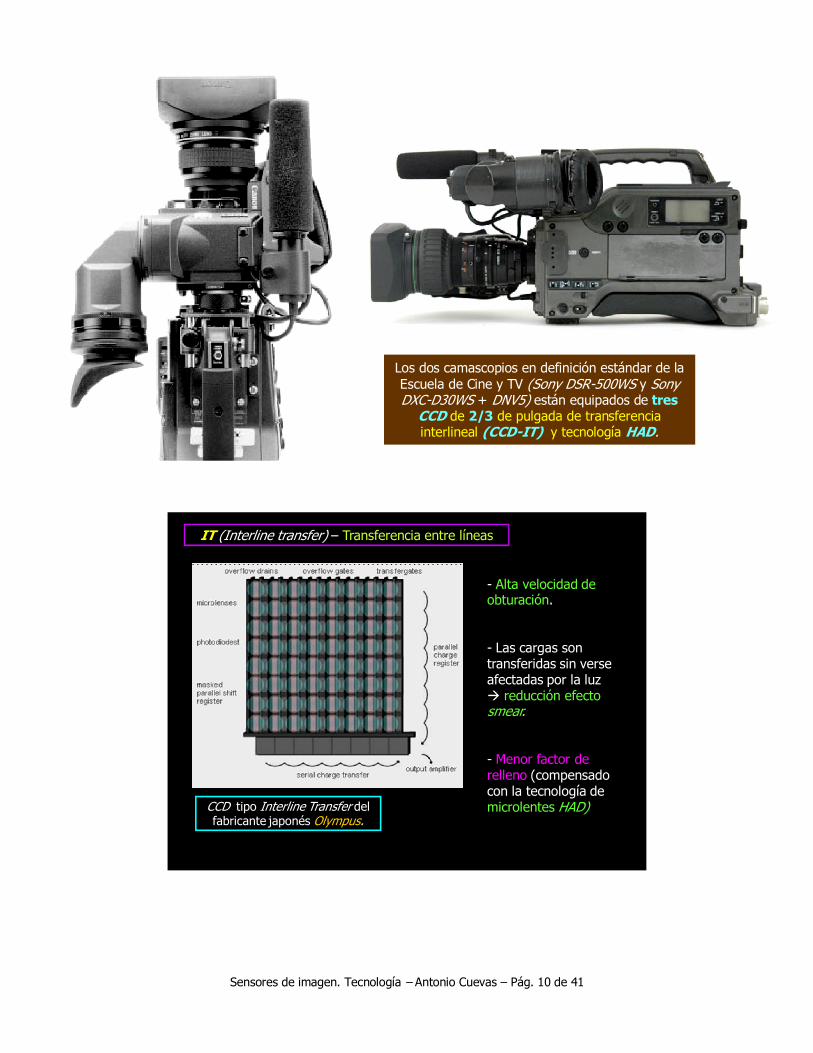
Son los CCD más comunes en cámaras de vídeo actuales. En ellos se intercalan líneas de almacenamiento (denominadas interlineado, de ahí el nombre del dispositivo) entre las líneas de píxeles sensibles a la luz. El interlineado provoca un descenso de la sensibilidad ya que se añaden líneas muertas al CCD sobre las que incide la luz pero no se efectúa fotodetección.
La principal ventaja de este tipo de CCD es la alta velocidad de obturación (siempre electrónica, carecen de obturadores mecánicos) ya que tras el periodo de exposición, las cargas son transferidas rápidamente, sin verse afectadas por luz adicional. Esta configuración permite también que el desplazamiento de la carga eléctrica a la zona protegida de la luz pueda realizarse en un único paso disminuyendo drásticamente el efecto smear. Tienen un menor factor de relleno (porcentaje del área del píxel sensible a la luz) circunstancia que es compensada con la tecnología de microlentes HAD como ocurre en los dos camascopios en resolución estándar de la Escuela de Cine y TV. A la izquierda, el CCD tipo Interline Transfer del prestigioso fabricante japonés Olympus.
IT (Interline transfer – Transferencia entre líneas)
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 10 de 41
Los dos camascopios en definición estándar de la Escuela de Cine y TV (Sony DSR-500WS y Sony DXC-D30WS + DNV5) están equipados de tres
CCD de 2/3 de pulgada de transferencia interlineal (CCD-IT) y tecnología HAD.
- Alta velocidad de obturación.
- Las cargas son transferidas sin verse afectadas por la luzà reducción efecto smear.
- Menor factor de relleno (compensado con la tecnología de microlentes HAD)CCD tipo Interline Transfer del
fabricante japonés Olympus.
IT (Interline transfer) – Transferencia entre líneas

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 11 de 41
Se trata de una técnica híbrida entre IT y FT pues combina el sistema interlineal de transferir la carga horizontalmente con un área de almacenamiento en la parte inferior a la que las cargas son transferidas en dirección vertical. Los CCD con este tipo de transferencia tienen un área dedicada al almacenamiento de la luz que está separada del área activa y otra área para los píxeles activos (receptores de luz). Permiten un mayor factor de relleno respecto a los IT pero este raramente supera el 70%. Su calidad es considerablemente mejor a cambio de mayor coste al ser mayor su tamaño.
FIT (Frame-Interline Transfer - Transferencia interlineal de cuadro)
Panasonic AG-DVC200E de tres CCD de 1/2” tipo Frame Interline Transfer. A la derecha el camascopio 24P Sony HDW-
F900H de tres CCD FIT de 2,2 megapíxeles

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 12 de 41
Los CCD de transferencia de cuadro y los de transferencia de línea son los más utilizados en camascopios profesionales y domésticos. El uso de una u otra tecnología depende del fabricante y de las características con que se desee dotar al camascopio: alta sensibilidad (FT) o reducido efecto smear (IT). Cualquiera de las dos carece de distorsión geométrica y su respuesta es muy lineal en relación con la luz incidente. Sony utiliza para sus equipos de alta gama (Betacam Digital y 24P) la tecnología híbrida FIT.
CONCLUSIONES
• Los CCD de transferencia de cuadro (FT) y los de transferencia de línea (IT) son los más utilizados en camascopios profesionales y domésticos.
• El uso de una u otra tecnología depende del fabricante y de las características que se deseen en el camascopio: alta sensibilidad (FT) o reducido efecto smear (IT).
• Cualquiera de las dos carece de distorsión geométrica y su respuesta es muy lineal con la luz incidente.
• Sony utiliza para sus equipos de alta gama (Betacam Digital y 24P) la tecnología híbrida FIT.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 13 de 41
Recordemos que, a diferencia de los CCD, en los CMOS cada píxel lleva integrado su propio amplificador y el conversor digital se encuentra integrado en la propia estructura del sensor (es por ello que se les denomina de “píxel activo”). Esto simplifica extraordinariamente el manejo de imágenes con grandes cantidades de datos. Al igual que el sensor CCD, el CMOS se basa en el efecto fotoeléctrico. Está formado por numerosos píxeles, que producen una corriente eléctrica variable en función de la intensidad de luz recibida. En el CMOS, a diferencia del CCD se incorpora un amplificador de la señal eléctrica en cada fotosito (píxel) y es común incluir el conversor digital en el propio chip. En un CCD es necesario enviar la señal eléctrica producida por cada píxel al exterior, desde allí se amplifica y posteriormente se digitaliza. Como ya hemos visto, la ventaja del CMOS estriba en que la electrónica puede leer directamente la señal de cada píxel con lo que se soluciona el problema conocido como blooming, por el que la recepción de una gran intensidad lumínica en un punto influye en los píxeles adyacentes (un brillo fuerte produce líneas blancas en la imagen). La desventaja es que entre los receptores se encuentra mucha electrónica que no es sensible a la luz, lo que implica que no pueda captar tanta luz en una misma superficie del chip. La solución al problema vino no sólo por una mayor densidad de integración, por lo que la electrónica no sensible se reducía en tamaño sino, como ya hemos visto, por la aplicación de microlentes (HAD) que a modo de lupa concentran la luz de cada celda en su fotosito. En los sistemas Interline Transfer o Frame Interline Transfer (CCD), el grupo óptico se encarga de formar la imagen sobre la superficie del CCD de manera que todos los elementos de la imagen son adquiridos (excitados) a la vez. Cada uno de los píxeles ha estado capturando luz durante un tiempo que es exactamente el mismo para todos ellos. Al final de este periodo de integración (tiempo durante el cual la luz está siendo recogida), las cargas son simultáneamente transferidas al área de almacenamiento, protegidas de la luz. Este procedimiento de trabajo, denominado Frame Global Shutter, implica que, por así decirlo, la imagen ha sido toda ella “congelada” en el mismo instante del tiempo; así, la reproducción de la misma no muestra ninguna distorsión geométrica. El sistema Rolling Shutter de los CMOS, funciona de otro modo, los píxeles del sensor no recogen la luz al mismo tiempo. Los píxeles de la misma fila sí la recogen en el mismo momento pero hay diferencias de tiempo entre filas. La primera línea horizontal será la primera en recoger luz y la primera en detener la recolección. La segunda línea comenzará su trabajo un instante después de la primera. Luego comienza la tercera. Y así sucesivamente. Es decir, el sensor trabaja línea por línea y, por tanto, la luz llega a los píxeles en forma secuencial, nunca al mismo tiempo.
TRANSFERENCIA DE INFORMACIÓN EN LOS SENSORES CMOS
Frame Global Shutter
Rolling Shutter

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 14 de 41
Aunque el tiempo total de recolección de luz será el mismo en cada fila, y la demora en comenzar y finalizar será también la misma entre una fila y la siguiente, la consecuencia de este diferente timing para cada fila, afecta seriamente a la reproducción de objetos en movimiento y la distorsión generada, llamada por algunos efecto gelatina (Jello Effect o Wobble) será mayor cuanto más velozmente se mueva un sujeto en cuadro. Probablemente el efecto gelatina del Rolling Shutter sea el inconveniente más obvio de todas las cámaras que utilizan CMOS. Las imágenes inferiores fueron obtenidas con una PMW-EX1 (equipada de tres CMOS) colocando la cámara sobre una cabeza robótica con movimiento lateral uniforme (derecha), grabadas a cuatro diferentes velocidades de obturación.
Más información en: http://www.dvinfo.net/conf/sony-xdcam-ex-cinealta/112362-rolling-shutter-skew-tests-grabs.html Ejemplos en YouTube: http://www.youtube.com/watch?v=LPOaH7uK9ho&eurl=http%3A%2F%2Fjelmetcamexperience.blogspot.com%2F2009%2F04%2Fcmos-wobble-el-efecto-gelatina.html&feature=player_embedded#t=30 http://www.youtube.com/watch?v=0qC0_nIUq9s&eurl=http%3A%2F%2Fjelmetcamexperience.blogspot.com%2F2009%2F04%2Fcmos-wobble-el-efecto-gelatina.html&feature=player_embedded#t=44 http://www.youtube.com/watch?v=ii4g-PxRpuM&eurl=http%3A%2F%2Fjelmetcamexperience.blogspot.com%2F2009%2F04%2Fcmos-wobble-el-efecto-gelatina.html&feature=player_embedded#t=45
1 2
3 4
1. Cámara estática 2. Panorámica lateral – 1/2000 seg. 3. Panorámica lateral – 1/250 seg. 4. Panorámica lateral – 1/60 seg.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 15 de 41
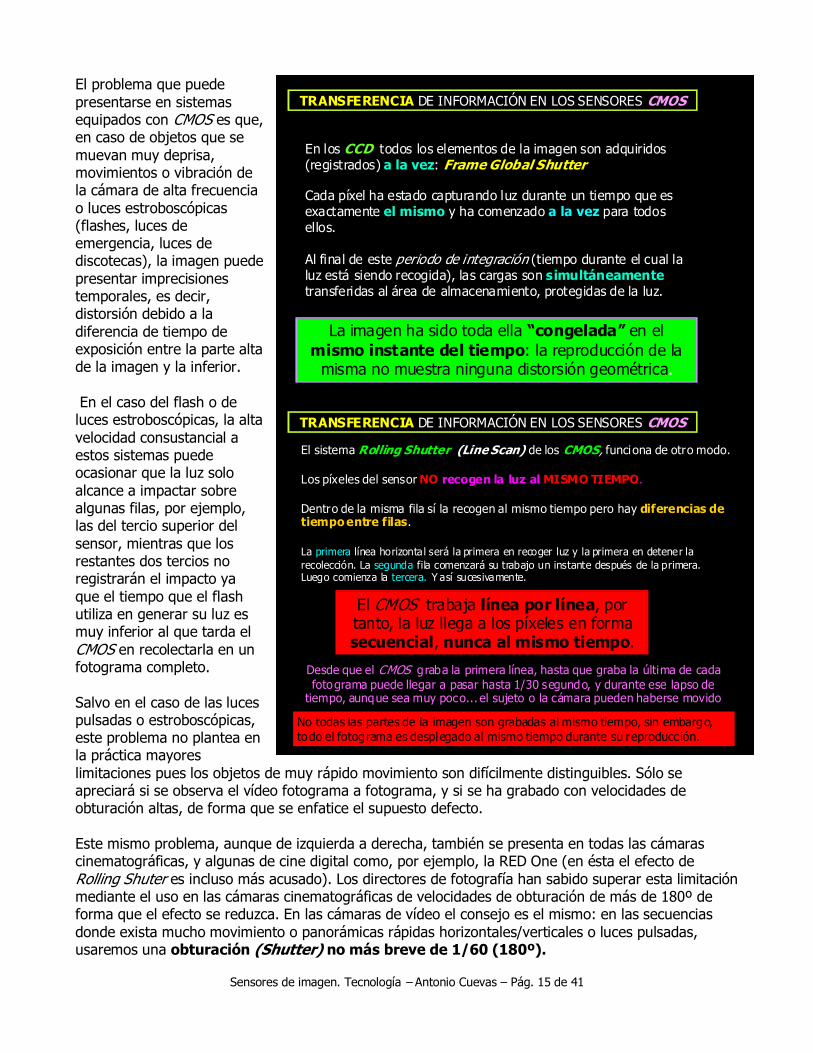
El problema que puede presentarse en sistemas equipados con CMOS es que, en caso de objetos que se muevan muy deprisa, movimientos o vibración de la cámara de alta frecuencia o luces estroboscópicas (flashes, luces de emergencia, luces de discotecas), la imagen puede presentar imprecisiones temporales, es decir, distorsión debido a la diferencia de tiempo de exposición entre la parte alta de la imagen y la inferior. En el caso del flash o de luces estroboscópicas, la alta velocidad consustancial a estos sistemas puede ocasionar que la luz solo alcance a impactar sobre algunas filas, por ejemplo, las del tercio superior del sensor, mientras que los restantes dos tercios no registrarán el impacto ya que el tiempo que el flash utiliza en generar su luz es muy inferior al que tarda el CMOS en recolectarla en un fotograma completo. Salvo en el caso de las luces pulsadas o estroboscópicas, este problema no plantea en la práctica mayores limitaciones pues los objetos de muy rápido movimiento son difícilmente distinguibles. Sólo se apreciará si se observa el vídeo fotograma a fotograma, y si se ha grabado con velocidades de obturación altas, de forma que se enfatice el supuesto defecto. Este mismo problema, aunque de izquierda a derecha, también se presenta en todas las cámaras cinematográficas, y algunas de cine digital como, por ejemplo, la RED One (en ésta el efecto de Rolling Shuter es incluso más acusado). Los directores de fotografía han sabido superar esta limitación mediante el uso en las cámaras cinematográficas de velocidades de obturación de más de 180º de forma que el efecto se reduzca. En las cámaras de vídeo el consejo es el mismo: en las secuencias donde exista mucho movimiento o panorámicas rápidas horizontales/verticales o luces pulsadas, usaremos una obturación (Shutter) no más breve de 1/60 (180º).
TRANSFERENCIA DE INFORMACIÓN EN LOS SENSORES CMOS
En los CCD todos los elementos de la imagen son adquiridos (registrados) a la vez: Frame Global Shutter
Cada píxel ha estado capturando luz durante un tiempo que es exactamente el mismo y ha comenzado a la vez para todos ellos.
Al final de este periodo de integración (tiempo durante el cual la luz está siendo recogida), las cargas son simultáneamentetransferidas al área de almacenamiento, protegidas de la luz.
La imagen ha sido toda ella “congelada” en el mismo instante del tiempo: la reproducción de la
misma no muestra ninguna distorsión geométrica.
El sistema Rolling Shutter (Line Scan) de los CMOS, funciona de otro modo.
Los píxeles del sensor NO recogen la luz al MISMO TIEMPO.
Dentro de la misma fila sí la recogen al mismo tiempo pero hay diferencias de tiempo entre filas.
La primera línea horizontal será la primera en recoger luz y la primera en detener la recolección. La segunda fila comenzará su trabajo un instante después de la primera. Luego comienza la tercera. Y así sucesivamente.
El CMOS trabaja línea por línea, por tanto, la luz llega a los píxeles en forma secuencial, nunca al mismo tiempo.
TRANSFERENCIA DE INFORMACIÓN EN LOS SENSORES CMOS
Desde que el CMOS graba la primera línea, hasta que graba la última de cada fotograma puede llegar a pasar hasta 1/30 segundo, y durante ese lapso de
tiempo, aunque sea muy poco... el sujeto o la cámara pueden haberse movido
No todas las partes de la imagen son grabadas al mismo tiempo, sin embargo, todo el fotograma es desplegado al mismo tiempo durante su reproducción.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 16 de 41
Objetos que se mueven muy deprisaMovimientos o vibración de la cámara de alta frecuencia
Problema:
La imagen puede presentar imprecisiones temporales (distorsión)debido a la diferencia de tiempo de exposición entre la parte alta de la imagen y la inferior >
Situaciones de riesgo
Flash o luces estroboscópicas
Problema:
La alta velocidad consustancial a estos sistemas hará que la luz solo alcance a impactar sobre algunas filas, por ejemplo, las del tercio superior del sensor, mientras que las restantes dos tercios no registrarán el impacto ya que el tiempo que el flash utiliza en generar su luz es muy inferior al que tarda el CMOS en recolectarla en un fotograma completo.
Qué ocurre en la práctica habitual
Salvo en el caso de las luces pulsadas o estroboscópicas, este problema en la práctica no plantea mayores limitaciones pues los objetos de muy rápido movimiento son difícilmente distinguibles.
Sólo se apreciará si se observa el vídeo fotograma a fotograma, y si se ha grabado con velocidades de obturación altas, de forma que se enfatice el supuesto defecto. >
En las secuencias donde exista mucho movimiento o panorámicas rápidas horizontales/verticales o luces pulsadas, usaremos una obturación (shutter)no mayor de 1/60 (180º).

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 17 de 41
Hay una gran cantidad de parámetros electrónicos referidos en una u otra forma a los sensores de imagen. Gran parte de ellos son utilizados por diseñadores e ingenieros en el discurrir de sus labores. En estas líneas vamos a hacer referencia solo a aquellos que tienen relación con nuestras necesidades prácticas como usuarios exigentes.
Cada sensor de imagen tiene como propiedad intrínseca el tamaño de sus píxeles. El tamaño medio oscila normalmente entre las 7 y 25 micras <2>. Al ser el píxel la unidad elemental de información, su tamaño determina la resolución espacial, es decir, el tamaño del menor objeto que es posible representar en la imagen. Cuanto mayor número de píxeles formen el sensor de imagen, más datos por área existirán; a esto se le llama resolución espacial. Una imagen de alta calidad, por lo tanto, será una imagen con una resolución espacial más grande. Los píxeles pequeños otorgan más
resolución mientras que los de mayor tamaño, al disponer de mayor capacidad, incrementan la sensibilidad pues son capaces de recibir mayor cantidad de fotones, y el rango dinámico. En este aspecto la imagen digital se comporta de forma análoga a la fotoquímica donde las emulsiones de grano fino producen mayor detalle y las de grano medio o alto, mayor sensibilidad fotométrica (requieren menos luz). Además de la resolución, el tamaño de los píxeles determina otras importantes capacidades del sensor como son la capacidad límite de almacenamiento (Full Well Capacity) y el rango dinámico (Dynamic Range) de los que hablaremos de inmediato.
PARÁMETROS BÁSICOS DEL SENSOR DE IMAGEN
Tamaño de los píxeles
TAMAÑO DEL PÍXEL
- Cada sensor tiene como propiedad intrínseca el tamaño de sus píxeles. Tamaño típico: entre 7 y 25 micras. >
- El tamaño determina la resolución espacial, es decir, el tamaño del menor objeto que es posible representar. Cuanto mayor número de píxeles formen el sensor, más datos por área existirán (mayor resolución espacial). >
- Los píxeles pequeños otorgan más resolución. Los de mayor tamaño, al disponer de mayor capacidad, incrementan la sensibilidad (son capaces de recibir y procesar mayor cantidad de fotones) y el rango dinámico.
- La imagen digital se comporta de forma análoga a la fotoquímica: las emulsiones de grano fino producen mayor detalle; las de grano medio o alto, mayor sensibilidad y mayor rango dinámico.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 18 de 41
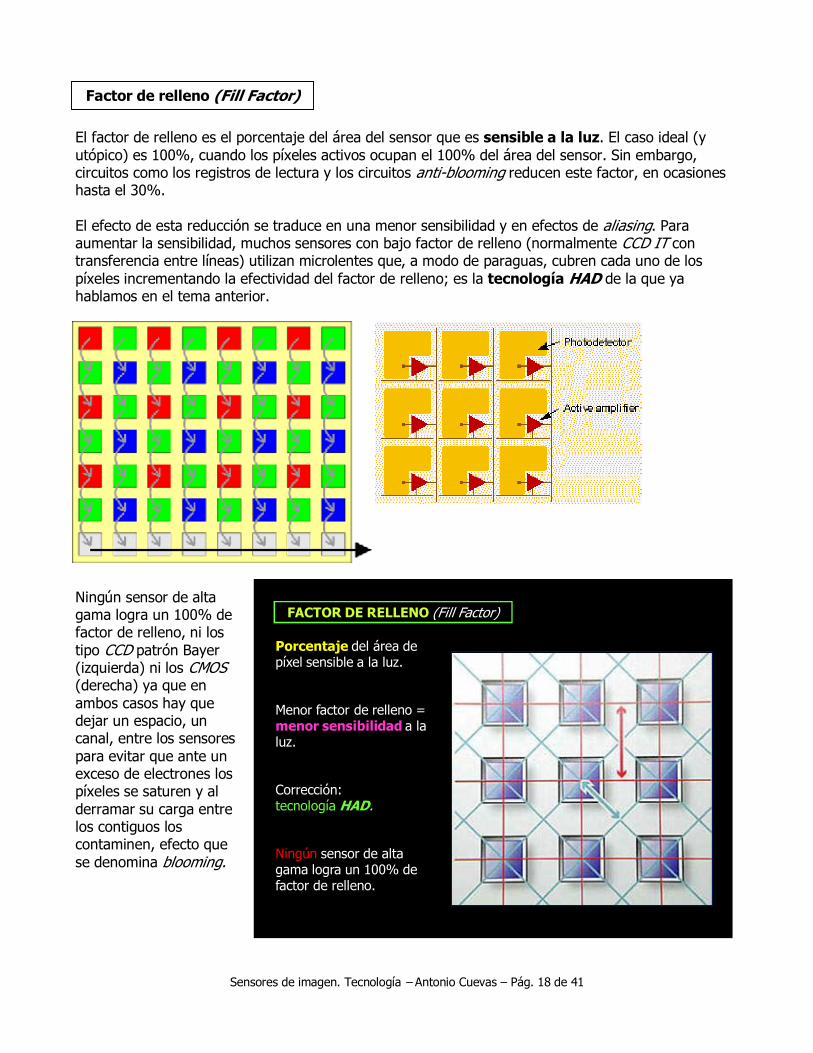
El factor de relleno es el porcentaje del área del sensor que es sensible a la luz. El caso ideal (y utópico) es 100%, cuando los píxeles activos ocupan el 100% del área del sensor. Sin embargo, circuitos como los registros de lectura y los circuitos anti-blooming reducen este factor, en ocasiones hasta el 30%. El efecto de esta reducción se traduce en una menor sensibilidad y en efectos de aliasing. Para aumentar la sensibilidad, muchos sensores con bajo factor de relleno (normalmente CCD IT con transferencia entre líneas) utilizan microlentes que, a modo de paraguas, cubren cada uno de los píxeles incrementando la efectividad del factor de relleno; es la tecnología HAD de la que ya hablamos en el tema anterior.
Ningún sensor de alta gama logra un 100% de factor de relleno, ni los tipo CCD patrón Bayer (izquierda) ni los CMOS (derecha) ya que en ambos casos hay que dejar un espacio, un canal, entre los sensores para evitar que ante un exceso de electrones los píxeles se saturen y al derramar su carga entre los contiguos los contaminen, efecto que se denomina blooming.
Factor de relleno (Fill Factor)
FACTOR DE RELLENO (Fill Factor)
Porcentaje del área de píxel sensible a la luz.
Menor factor de relleno = menor sensibilidad a la luz.
Corrección: tecnología HAD.
Ningún sensor de alta gama logra un 100% de factor de relleno.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 19 de 41
Los sensores de silicio detectan fotones individuales, pero ninguno puede detectar todos los que inciden en él. Al porcentaje de fotones que un sensor es capaz de transformar en electrones, en relación con todos los que inciden sobre él, se le denomina eficiencia cuántica (Quantum Efficiency) que podemos definir con mayor precisión como la relación entre fotones recibidos y carga acumulada. La eficiencia cuántica, por tanto, determina la sensibilidad del chip a los fotones que inciden sobre él. Esta eficiencia es diferente según la longitud de onda en que viaje el fotón, siendo mayor en las longitudes próximas al infrarrojo (700nm) y menor en el resto <3>. Esto hace que los fotodiodos deban incorporar un filtro reductor de infrarrojos para contrarrestar el exceso de sensibilidad en esta parte del espectro visible. Es interesante constatar que la tecnología de los fotodiodos de silicio ha logrado aventajar en particulares aspectos al sistema de visión humana. Primero, el sensor de silicio es sensible a una
banda del espectro (de 200 a 1200nm) que prácticamente triplica la banda de sensibilidad al color del ojo humano (limitada a la zona entre 400 y 700nm). El ojo humano tiene una eficiencia cuántica promedio del 10% (solo uno de cada diez fotones que impactan en nuestra retina son detectados y transformados en información visual) mientras que algunos de los sensores más evolucionados, concretamente los diseñados para aplicaciones astronómicas, alcanzan cifras mucho mayores. Las viejas placas fotográficas tenían una eficiencia cuántica típica del 1% es decir, por cada 100 fotones que le alcanzaban
sólo uno tenía éxito en sensibilizar un grano de emulsión fotográfica, típicamente de 15 micras de tamaño. Mucho han cambiado hoy las cosas. La tecnología electrónica moderna provee diferentes sistemas para hacer que los fotodiodos de silicio tengan una eficiencia cuántica mayor con la que actualmente se logran cifras típicas del orden del 50% en la zona de los 700 nanómetros del espectro visible como se muestra en la figura superior. Algunos fotodiodos para aplicaciones especiales – fuera del ámbito de interés de estas líneas – han superado ya el 80% de eficiencia cuántica.
Eficiencia cuántica (Quantum Efficiency)
El fotodiodo de silicio es sensible a los fotones de cualquier longitud de onda en mayor o menor
grado. Pero, típicamente, lo es más a los rojos e infrarrojos y menos a los azules y verdes.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 20 de 41
En la práctica la eficiencia cuántica siempre es bastante menor del 100% puesto que en todo caso existirán pérdidas inevitables. En la figura de la derecha se sintetiza cómo solo una porción de los fotones incidentes llega al fotosensor: una parte es reflejada producto del factor de relleno, otra parte simplemente no es absorbida (la luz debe atravesar la capa de silicio; en todo sistema hay siempre despilfarro o pérdidas) y otra, aunque es transformada en electrones, estos no logran ser recogidos.
La figura muestra la respuesta espectral de diversos tipos de CCD respecto al ojo humano. Es notable la diferencia entre la capacidad de respuesta del CCD estándar y el ojo humano
El fotodiodo de silicio es sensible en mayor o menor grado a los fotones de cualquier longitud de onda. Pero, típicamente, lo es más a los rojos e infrarrojos y menos a los azules y verdes.
En todo sensor resulta imprescindible un
filtro de infrarrojos para contrarrestar su exceso de sensibilidad
en esta parte del espectro visible
EFICIENCIA CUÁNTICA (Quantum Efficiency)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 21 de 41
<2> Micra: unidad de longitud equivalente a la millonésima parte de un metro, representada por el símbolo griego μ. Se denomina indistintamente micra, micrón o micrómetro. 1 μ = 10-6m = 10-3mm (una milésima de milímetro) <3> Pedro Almodóvar y Rodrigo Prieto se plantearon el reto de rodar completamente a oscuras en su película “Abrazos rotos”. Pedro Almodóvar cuenta en su blog que durante uno de los días de rodaje en agosto de 2008, Rodrigo Prieto le dijo con la sencillez que le caracteriza "estamos rodando una escena histórica". Y continúa Almodóvar... Le miré extrañado, porque Rodrigo es de los técnicos con más talento y menos ostentoso que he conocido. Su comentario hacía referencia a la última tacada de secuencias rodadas en la más absoluta oscuridad. ¿Cómo se puede rodar sin luz, sin nada de luz visible, dentro de un espacio parecido a un cajón cerrado, sin una sola rendija? Rodrigo investigó hasta dar con la solución. Según sus palabras: “Sabemos que el ojo humano es capaz de ver un rango limitado del espectro electromagnético, pero la luz ultravioleta e infrarroja es posible registrarla fotográficamente, aunque nosotros no la veamos. Me puse a investigar y descubrí que hay luces infrarrojas que iluminan espacios para que las cámaras de seguridad “vean” lo que sucede en un lugar donde aparentemente no hay luz. Supuse que sería posible adaptar una cámara de alta definición para poder funcionar con luz infrarroja como las cámaras de seguridad. En Panavision de París ya habían hecho pruebas con su cámara digital Genesis cambiando un filtro que impide el paso de la luz infrarroja por otro transparente. Normalmente las cámaras digitales necesitan evitar que el espectro no visible afecte su sensor, ya que la señal tendría información que no corresponde al ojo humano, pero si se le quita el filtro que lo impide, entonces es posible grabar las longitudes de onda que corresponden a la luz infrarroja... El reto de rodar dentro de un enorme cajón negro ha sido para mí una experiencia fascinante. Mi trabajo consiste en iluminar y debía hacer lo contrario, tenía que trabajar en una abstracción total, ya que debía imaginar la “no luz” y cómo representar un espacio totalmente negro en el que los actores debían actuar totalmente a ciegas, frente a una cámara y un objetivo que sí les veía a ellos. Fue una revelación casi espiritual descubrir que la luz infrarroja es un minúsculo ejemplo de todo lo que existe en el Universo, y alrededor nuestro, que no somos capaces de percibir. Nosotros pensamos que la realidad es solamente lo que vemos, pero de hecho hay una infinidad de vibraciones, ondas, y radiaciones que no vemos ni sentimos y que son tan reales como nuestra propia piel…”
Asier Etxeandia, Lluis Homar, Blanca Portillo y Tamar Novas entrando en fila india en el comedor del
restaurante sin vistas. Pedro Almodóvar tomó como referencia un restaurante de París (Dans le noir) donde
se come a oscuras y los camareros son ciegos. Foto: © Paola Ardizzoni y Emilio Pereda.
En digital, la Panavision Genesis captó las imágenes de la cena en el restaurante sin vistas, un auténtico reto para el director de fotografía Rodrigo Prieto porque rodó a
oscuras iluminando con luces infrarrojas. Es una escena que no veremos en la película porque "se cayó" en el
montaje final de Los abrazos rotos, pero parece que se incluirá en los extras del DVD de la película.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 22 de 41
Los abrazos rotos (2008) D: Pedro Almodóvar – F: Rodrigo Prieto
Cámara Panavision Genesis sin filtro IR
Los abrazos rotos (2008) D: Pedro Almodóvar – F: Rodrigo Prieto
Cámara Panavision Genesis sin filtro IR
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 23 de 41
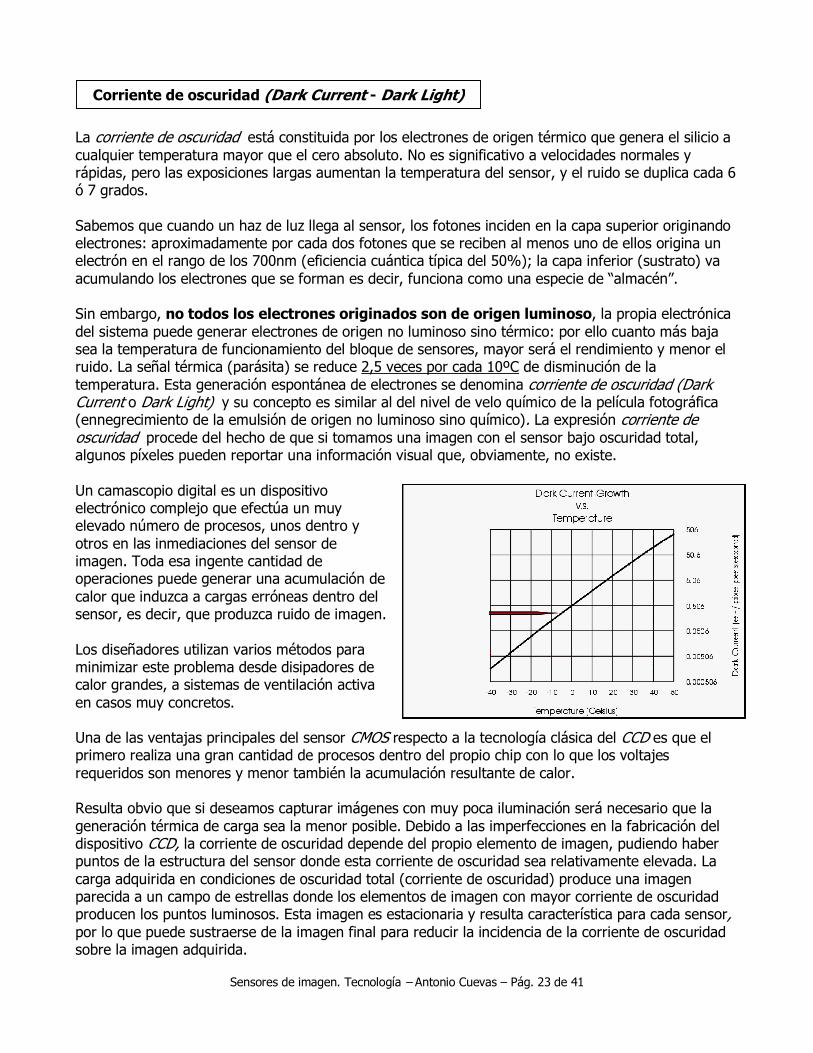
La corriente de oscuridad está constituida por los electrones de origen térmico que genera el silicio a cualquier temperatura mayor que el cero absoluto. No es significativo a velocidades normales y rápidas, pero las exposiciones largas aumentan la temperatura del sensor, y el ruido se duplica cada 6 ó 7 grados. Sabemos que cuando un haz de luz llega al sensor, los fotones inciden en la capa superior originando electrones: aproximadamente por cada dos fotones que se reciben al menos uno de ellos origina un electrón en el rango de los 700nm (eficiencia cuántica típica del 50%); la capa inferior (sustrato) va acumulando los electrones que se forman es decir, funciona como una especie de “almacén”. Sin embargo, no todos los electrones originados son de origen luminoso, la propia electrónica del sistema puede generar electrones de origen no luminoso sino térmico: por ello cuanto más baja sea la temperatura de funcionamiento del bloque de sensores, mayor será el rendimiento y menor el ruido. La señal térmica (parásita) se reduce 2,5 veces por cada 10ºC de disminución de la temperatura. Esta generación espontánea de electrones se denomina corriente de oscuridad (Dark Current o Dark Light) y su concepto es similar al del nivel de velo químico de la película fotográfica (ennegrecimiento de la emulsión de origen no luminoso sino químico). La expresión corriente de oscuridad procede del hecho de que si tomamos una imagen con el sensor bajo oscuridad total, algunos píxeles pueden reportar una información visual que, obviamente, no existe. Un camascopio digital es un dispositivo electrónico complejo que efectúa un muy elevado número de procesos, unos dentro y otros en las inmediaciones del sensor de imagen. Toda esa ingente cantidad de operaciones puede generar una acumulación de calor que induzca a cargas erróneas dentro del sensor, es decir, que produzca ruido de imagen. Los diseñadores utilizan varios métodos para minimizar este problema desde disipadores de calor grandes, a sistemas de ventilación activa en casos muy concretos. Una de las ventajas principales del sensor CMOS respecto a la tecnología clásica del CCD es que el primero realiza una gran cantidad de procesos dentro del propio chip con lo que los voltajes requeridos son menores y menor también la acumulación resultante de calor. Resulta obvio que si deseamos capturar imágenes con muy poca iluminación será necesario que la generación térmica de carga sea la menor posible. Debido a las imperfecciones en la fabricación del dispositivo CCD, la corriente de oscuridad depende del propio elemento de imagen, pudiendo haber puntos de la estructura del sensor donde esta corriente de oscuridad sea relativamente elevada. La carga adquirida en condiciones de oscuridad total (corriente de oscuridad) produce una imagen parecida a un campo de estrellas donde los elementos de imagen con mayor corriente de oscuridad producen los puntos luminosos. Esta imagen es estacionaria y resulta característica para cada sensor, por lo que puede sustraerse de la imagen final para reducir la incidencia de la corriente de oscuridad sobre la imagen adquirida.
Corriente de oscuridad (Dark Current - Dark Light)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 24 de 41
Existen varias formas de enfriar drásticamente el CCD; la más utilizada en aplicaciones especiales es a través de un módulo basado en el efecto Peltier: cuando se unen dos metales diferentes y se aplica tensión eléctrica sobre ellos, uno de ellos se calienta y el otro se enfría. Se trata de un curioso dispositivo de estado sólido, carente de las partes mecánicas, gases y fluidos habituales en instalaciones frigoríficas. Su funcionamiento se obtiene mediante cristales de semiconductor. El problema es que mientras la cara del módulo Peltier que se encuentra en contacto con el chip se enfría drásticamente, lo contrario ocurre en la otra cara... se calienta. Y lo hace de tal forma que hay que refrigerar el módulo Peltier. De ahí que se hable de cámaras refrigeradas con líquido (circuitos cerrados de líquido refrigerante) o con aire (ventiladores) para aplicaciones especiales tales como telescopios. Arriba la cámara monocromática Cohu 4920 para aplicaciones científicas con un CCD tipo Interline Transfer refrigerado por el sistema Peltier (módulos amarillos) cuya característica distintiva es la capacidad de registrar imágenes críticas, es decir, de muy bajo contraste y en situaciones de muy poca luz (secuencia de análisis del ADN, aplicaciones de microscopio, radiología, astronomía, control de calidad, etc.) Desde el punto de vista de la correcta temperatura de funcionamiento de los sensores no es aconsejable, como se ve habitualmente en los equipos de noticias, que los camascopios vayan embutidos en las fundas de protección tipo Portabrace. Si bien es verdad que estas fundas, o una simple sombrilla, proporcionan una protección básica contra los rayos solares y algo también contra las radiaciones cósmicas particularmente nocivas para los sensores, una alta temperatura de funcionamiento puede ocasionar terribles desviaciones cromáticas y, en casos extremos, la muerte de algún píxel.
Aunque esto normalmente no afecta a las cámaras de vídeo, digamos finalmente que hay una relación directa entre la corriente de oscuridad y el tiempo de exposición: cuanto mayor es este, más
notoria es la corriente de oscuridad. El gráfico relaciona ambos parámetros en el caso de una cámara fotográfica digital Nikon Coolpix 990. El respaldo SinarBack de estudio tiene un sistema de refrigeración termoeléctrico para suprimir ruido y mejorar el detalle en las sombras. En las cámaras digitales de observación astronómica en que los tiempos de exposición suelen ser de minutos, la cuestión del enfriamiento del CCD se torna decisiva. Los respaldos CCD se refrigeran mediante helio líquido y suelen alcanzar temperaturas de –50 C.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 25 de 41
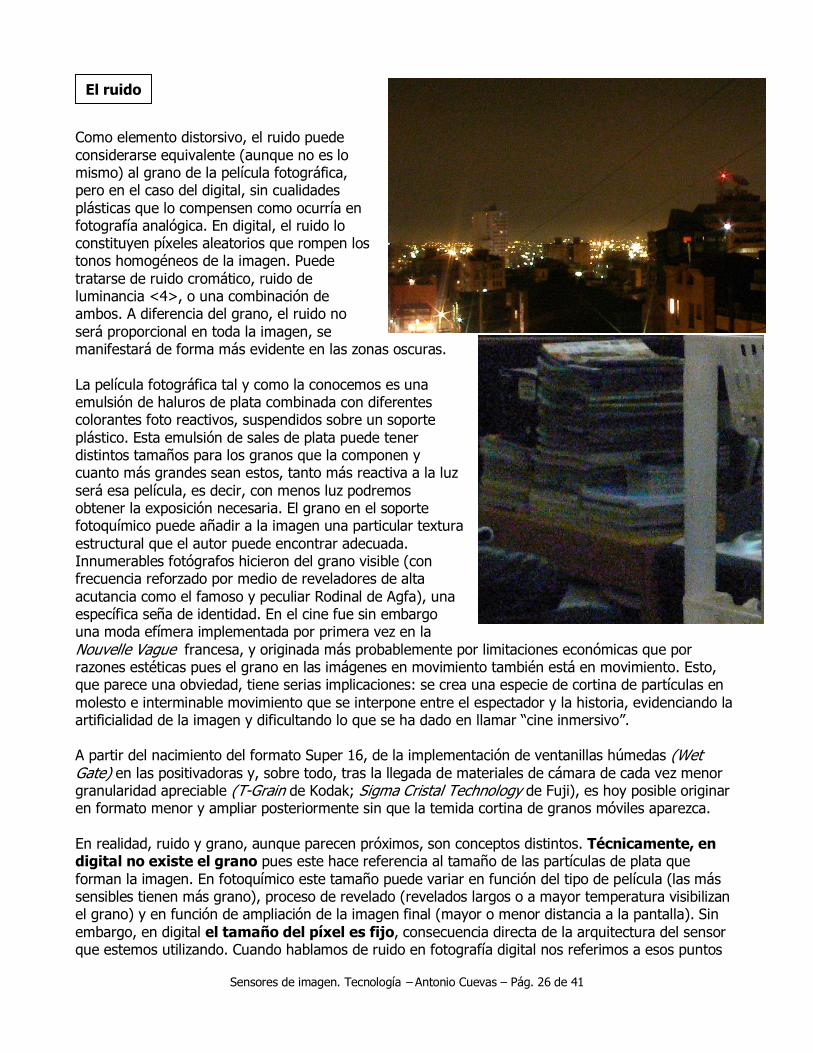
Resulta importante disponer de un sistema de disipación del
calor generado por los sensores.
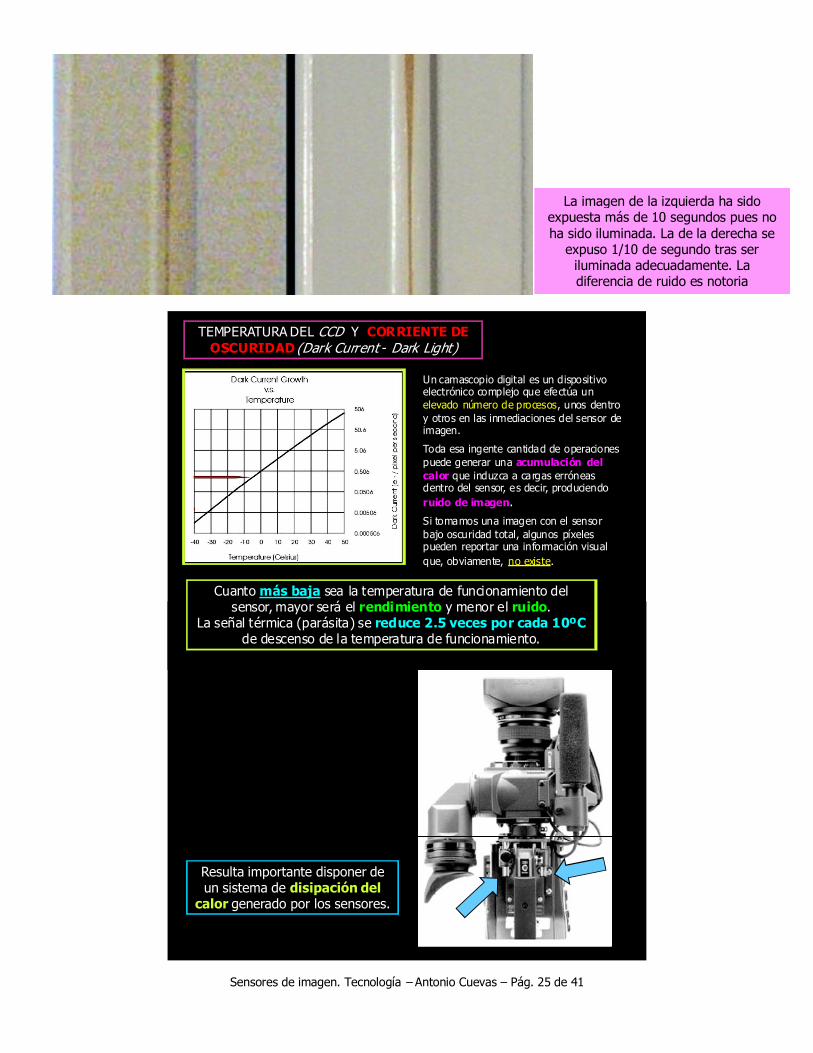
La imagen de la izquierda ha sido expuesta más de 10 segundos pues no ha sido iluminada. La de la derecha se
expuso 1/10 de segundo tras ser iluminada adecuadamente. La diferencia de ruido es notoria
Un camascopio digital es un dispositivo electrónico complejo que efectúa un elevado número de procesos, unos dentro y otros en las inmediaciones del sensor de imagen.
Toda esa ingente cantidad de operaciones puede generar una acumulación del calor que induzca a cargas erróneas dentro del sensor, es decir, produciendo ruido de imagen.Si tomamos una imagen con el sensorbajo oscuridad total, algunos píxeles pueden reportar una información visual que, obviamente, no existe.
TEMPERATURA DEL CCD Y CORRIENTE DE OSCURIDAD (Dark Current - Dark Light)
Cuanto más baja sea la temperatura de funcionamiento del sensor, mayor será el rendimiento y menor el ruido.
La señal térmica (parásita) se reduce 2.5 veces por cada 10ºC de descenso de la temperatura de funcionamiento.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 26 de 41
Como elemento distorsivo, el ruido puede considerarse equivalente (aunque no es lo mismo) al grano de la película fotográfica, pero en el caso del digital, sin cualidades plásticas que lo compensen como ocurría en fotografía analógica. En digital, el ruido lo constituyen píxeles aleatorios que rompen los tonos homogéneos de la imagen. Puede tratarse de ruido cromático, ruido de luminancia <4>, o una combinación de ambos. A diferencia del grano, el ruido no será proporcional en toda la imagen, se manifestará de forma más evidente en las zonas oscuras. La película fotográfica tal y como la conocemos es una emulsión de haluros de plata combinada con diferentes colorantes foto reactivos, suspendidos sobre un soporte plástico. Esta emulsión de sales de plata puede tener distintos tamaños para los granos que la componen y cuanto más grandes sean estos, tanto más reactiva a la luz será esa película, es decir, con menos luz podremos obtener la exposición necesaria. El grano en el soporte fotoquímico puede añadir a la imagen una particular textura estructural que el autor puede encontrar adecuada. Innumerables fotógrafos hicieron del grano visible (con frecuencia reforzado por medio de reveladores de alta acutancia como el famoso y peculiar Rodinal de Agfa), una específica seña de identidad. En el cine fue sin embargo una moda efímera implementada por primera vez en la Nouvelle Vague francesa, y originada más probablemente por limitaciones económicas que por razones estéticas pues el grano en las imágenes en movimiento también está en movimiento. Esto, que parece una obviedad, tiene serias implicaciones: se crea una especie de cortina de partículas en molesto e interminable movimiento que se interpone entre el espectador y la historia, evidenciando la artificialidad de la imagen y dificultando lo que se ha dado en llamar “cine inmersivo”. A partir del nacimiento del formato Super 16, de la implementación de ventanillas húmedas (Wet Gate) en las positivadoras y, sobre todo, tras la llegada de materiales de cámara de cada vez menor granularidad apreciable (T-Grain de Kodak; Sigma Cristal Technology de Fuji), es hoy posible originar en formato menor y ampliar posteriormente sin que la temida cortina de granos móviles aparezca. En realidad, ruido y grano, aunque parecen próximos, son conceptos distintos. Técnicamente, en digital no existe el grano pues este hace referencia al tamaño de las partículas de plata que forman la imagen. En fotoquímico este tamaño puede variar en función del tipo de película (las más sensibles tienen más grano), proceso de revelado (revelados largos o a mayor temperatura visibilizan el grano) y en función de ampliación de la imagen final (mayor o menor distancia a la pantalla). Sin embargo, en digital el tamaño del píxel es fijo, consecuencia directa de la arquitectura del sensor que estemos utilizando. Cuando hablamos de ruido en fotografía digital nos referimos a esos puntos
El ruido

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 27 de 41
de color repartidos al azar en la imagen obtenida, especialmente en las áreas de sombra y zonas monocolor. Funcionalmente, tanto el ruido como la corriente de oscuridad, se corresponden más con el velo. En la era digital, cuando capturamos una imagen con una alta sensibilidad no conseguimos grano, sino ruido, algo diferente. Es más, si fuera el caso, en el entorno digital el grano clásico puede añadirse fácilmente en postproducción. En el ámbito electrónico, ruido son todas aquellas señales de origen eléctrico, no deseadas y unidas a la señal principal o útil que, al alterarla, producen efectos más o menos perjudiciales. Esta información intrusa no se corresponde con la realidad que queremos mostrar o grabar, y es normalmente consecuencia de defectos en el proceso de captación. Suele encontrarse con más frecuencia en el canal azul de las imágenes digitales, por ejemplo en los planos donde aparece una gran extensión de cielo. Cuando la señal principal es analógica, el ruido será perjudicial en la medida que lo sea su amplitud (potencia) respecto a la señal principal. Cuando las señales son digitales, si el ruido no es capaz de producir un cambio de estado, será irrelevante. El diseño de las cámaras electrónicas debe garantizar valores bajos de ruido (valores elevados de la relación señal/ruido o cociente de potencias entre señal real y ruido artificial) de modo que en todo momento sea posible discriminar la señal pura del inevitable ruido subyacente. El ruido tiene un importante efecto en cualquier sistema eléctrico que se utilice para recoger o transmitir información pues las señales deseadas que transmiten la “auténtica” información pueden resultar considerablemente enmascaradas o distorsionadas por el ruido.
Cuando hablamos de ruido en la imagen digital nos referimos a ciertos puntos de color repartidos al azar en la imagen obtenida, especialmente visibles sobre áreas de sombra, zonas monocolor, y tonos uniformes <4>. Un CCD o CMOS está compuesto por una malla de celdas fotosensibles encargadas de recibir la imagen formada por la óptica de la cámara. Cada una de esas celdas contendrá uno o varios fotodiodos con capacidad para convertir la luz en una señal eléctrica, la cual será procesada como una imagen, es decir, será convertida a datos numéricos que se almacenarán en forma binaria en la memoria de la cámara para dar origen a un píxel. Y es esa actividad eléctrica, en sí misma, la que generará una cierta señal aun en ausencia de luz, que oscilará en relación con la temperatura, generando datos al azar, que originarán ruido. Podría compararse al soplido de fondo que escuchamos en un equipo de música cuando elevamos el volumen sin ni siquiera haber colocado un CD en el lector, soplido que aumentará según incrementemos el volumen, consecuencia del propio circuito electrónico. Aplicado a la imagen digital, cuando forzamos la sensibilidad del sensor, aumentado su valor ISO (International Standardization Organization) o introduciendo ganancias <5>, estamos haciendo algo parecido a subir el volumen, incrementado la actividad eléctrica, forzando el sensor, con el consiguiente incremento de ruido en la imagen. De hecho, la sensibilidad de cada uno de los píxeles del sensor es fija, aumentar la sensibilidad no se logra por el incremento de la sensibilidad misma de los fotones - que en cada caso está predeterminada -, sino a través de la amplificación posterior de la señal que estos emiten.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 28 de 41
Por tanto, a la hora de capturar una señal luminosa débil (sombras, imágenes nocturnas...), en el caso de amplificarla estamos ampliando igualmente los datos aleatorios (puntos de color dispersos por la toma) fruto de la actividad eléctrica del sensor; es decir, aumentaremos el ruido de imagen. En el caso de la fotografía fija digital, el ruido se verá incrementado, como ya hemos visto, con los tiempos largos de exposición (más de 2 segundos) y desde luego por las altas temperaturas.
Hay dos posibilidades de origen del ruido en los sistemas electrónicos. El ruido aleatorio (Random Noise) depende del azar, de las imperfecciones de construcción del sensor pues entre sus millones de fotodiodos puede haber algunos defectuosos. Las altas temperaturas y la humedad pueden aumentar el ruido aleatorio. Las cámaras de tres sensores con prisma de separación (filtros dicroicos) que vimos en el capítulo anterior generan más calor que las cámaras con mosaico Bayer y por tanto son más susceptibles al ruido aleatorio.
El llamado patrón fijo de ruido (Fixed Pattern Noise) es el particular de cada sensor y tiene relación directísima con su vaciado tras cada exposición o “reseteo”. Una vez que el fotodiodo se ha llenado de fotones, debe descargarse en forma de electrones para su cuantificación. Lamentablemente, tal descarga no siempre es completa y este es el origen del ruido pues en la práctica siempre queda algo de carga remanente en el fotodiodo, no se ha vaciado por completo. Y con una complicación adicional: tal remanente puede variar de un fotodiodo a otro. Y así, al tomar una nueva muestra (el siguiente fotograma) el valor resultante no será ya el “auténtico” que correspondería a la realidad, ha sido falseado por los fotones procedentes del fotograma anterior. Este ruido es, obviamente, más notorio en las partes oscuras de la imagen; en las altas luces donde hay de por sí muchos fotones, el hecho de este “añadido” no deseado tiene mucho menor impacto.
El patrón fijo de ruido aumenta cuando el tamaño del píxel disminuye. La dificultad de interpretación consecuencia de la reducción del tamaño del píxel, y por la interacción de los propios píxeles por su extrema cercanía, generará igualmente datos aleatorios que se verán incrementados enormemente en el caso de amplificar la señal. La influencia de los fotones/electrones remanentes en un fotograma procedentes del fotograma anterior, es obviamente mucho menor en tamaños mayores de píxel. Esto explica que los modelos que cuentan con sensores de gran tamaño (es el caso de todas las cámaras de cine digital, con sensores de tamaño comparable al negativo tradicional en 35mm) generen un nivel de ruido menor que las demás, soportando igualmente valores ISO más elevados con un nivel de ruido más bajo en relación con el que generaría una cámara de sensores en 2/3 o 1/2 pulgada, por ejemplo.
RUIDO
En digital el tamaño del píxel es fijo, consecuencia directa de la
arquitectura del sensor que estemos uti lizando.
Ruido y grano, aunque parecen próximos, son conceptos distintos.
Técnicamente, en digital no existe el grano pues este hace referencia al tamaño de las partículas de plata que forman la imagen.
A diferencia del grano, el ruido no será proporcional en toda la
imagen, se mani festará de forma más evidente en las zonas oscuras.
A d iferencia del grano, el ruido no será proporcional en toda la imagen, se manifestará de forma más evidente en las zonas oscuras.A d iferencia del grano, el ruido no será proporcional en toda la imagen, se manifestará de forma más evidente en las zonas oscuras.A d iferencia del grano, el ruido no será proporcional en toda la imagen, se manifestará de forma más evidente en las zonas oscuras.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 29 de 41
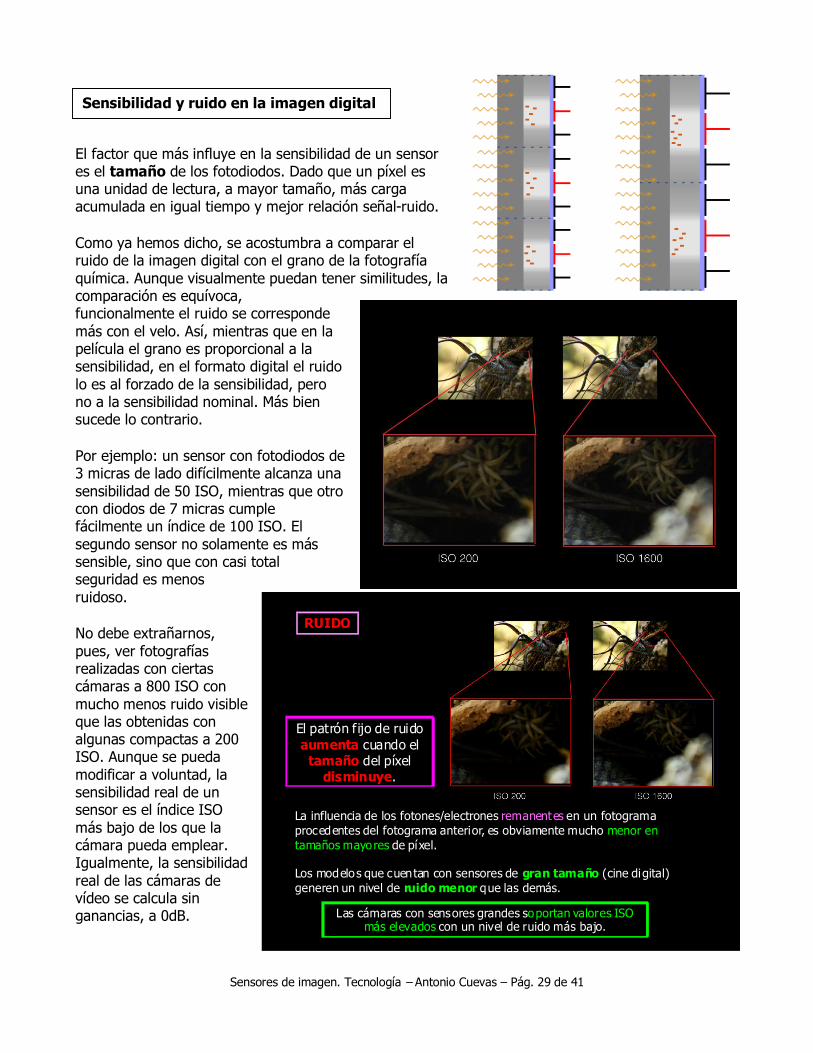
El factor que más influye en la sensibilidad de un sensor es el tamaño de los fotodiodos. Dado que un píxel es una unidad de lectura, a mayor tamaño, más carga acumulada en igual tiempo y mejor relación señal-ruido.
Como ya hemos dicho, se acostumbra a comparar el ruido de la imagen digital con el grano de la fotografía química. Aunque visualmente puedan tener similitudes, la comparación es equívoca, funcionalmente el ruido se corresponde más con el velo. Así, mientras que en la película el grano es proporcional a la sensibilidad, en el formato digital el ruido lo es al forzado de la sensibilidad, pero no a la sensibilidad nominal. Más bien sucede lo contrario.
Por ejemplo: un sensor con fotodiodos de 3 micras de lado difícilmente alcanza una sensibilidad de 50 ISO, mientras que otro con diodos de 7 micras cumple fácilmente un índice de 100 ISO. El segundo sensor no solamente es más sensible, sino que con casi total seguridad es menos ruidoso.
No debe extrañarnos, pues, ver fotografías realizadas con ciertas cámaras a 800 ISO con mucho menos ruido visible que las obtenidas con algunas compactas a 200 ISO. Aunque se pueda modificar a voluntad, la sensibilidad real de un sensor es el índice ISO más bajo de los que la cámara pueda emplear. Igualmente, la sensibilidad real de las cámaras de vídeo se calcula sin ganancias, a 0dB.
Sensibilidad y ruido en la imagen digital
RUIDO
El patrón f ijo de ruido aumenta cuando el
tamaño del píxel disminuye.
La influencia de los fotones/electrones remanentes en un fotograma procedentes del fotograma anterior, es obviamente mucho menor en tamaños mayores de píxel.
Los modelos que cuentan con sensores de gran tamaño (cine digital) generen un nivel de ruido menor que las demás.
Las cámaras con sensores grandes soportan valores ISO más elevados con un nivel de ruido más bajo.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 30 de 41
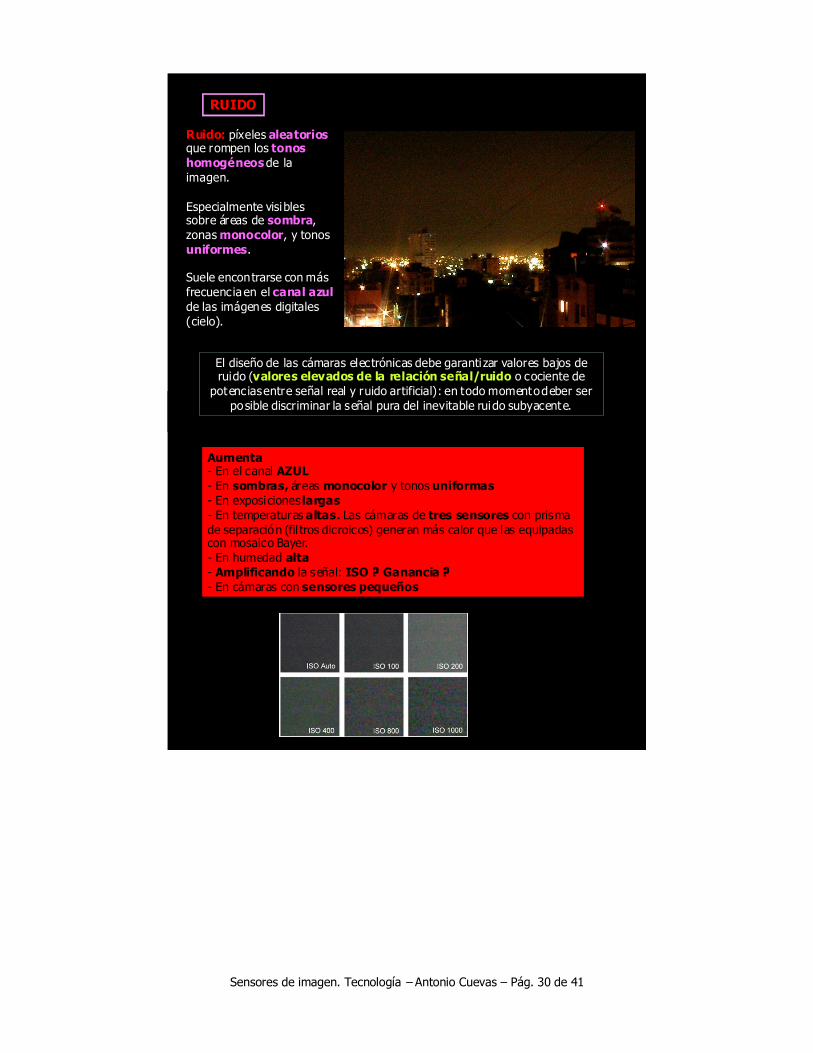
Aumenta- En el canal AZUL- En sombras, áreas monocolor y tonos uniformas- En exposiciones largas- En temperaturas altas. Las cámaras de tres sensores con prisma de separación (fil tros dicroicos) generan más calor que las equipadas con mosaico Bayer.- En humedad alta- Amplificando la señal: ISO ? Ganancia ?- En cámaras con sensores pequeños
RUIDO
Ruido: píxeles aleatoriosque rompen los tonos homogéneos de la imagen.
Especialmente visibles sobre áreas de sombra, zonas monocolor, y tonos uniformes.
Suele encontrarse con más frecuencia en el canal azul de las imágenes digitales (cielo).
El diseño de las cámaras electrónicas debe garanti zar valores bajos de ruido (valores elevados de la relación señal/ruido o cociente de
potencias entre señal real y ruido artificial): en todo momento deber ser posible discriminar la señal pura del inevitable ruido subyacente.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 31 de 41
<4> Hay un denominado ruido de luminancia, cuya curiosa denominación en inglés es Salt-and-Pepper Noise (ruido de sal y pimienta) por el tono de los puntos ruidosos. Una imagen con ruido de luminancia mostrará píxeles claros en zonas donde solo debería haber oscuros, y viceversa, puntos negros en las altas luces. A veces puede ser causado por errores del conversor analógico-digital, o errores en la transmisión de bits. Tienen un cierto parecido con los píxeles muertos y los píxeles pegados que veremos un poco más adelante aunque estos no tienen, como el ruido de luminancia, carácter aleatorio.
Los fotógrafos utilizan un truco para eliminarlo – y en general para eliminar el ruido en las exposiciones largas – que se denomina en inglés Dark Frame Substraction. Consiste en tomar, tras la exposición propiamente dicha, una segunda foto de exactamente la misma duración de exposición pero con el obturador cerrado, lo que se llama un “dark frame”, y que sirve a la cámara para localizar exactamente los puntos o píxeles ruidosos causados por larga exposición, ya que éstos son más o menos fijos, y por tanto serán idénticos de una toma a la siguiente. Una vez hecho esto, bien internamente con el procesador de la propia cámara (cuando se dispara en JPEG) o bien con un programa compatible con esta función si se registra en RAW, se combinarán las dos tomas mediante substracción, de modo que ese ruido en particular, el de larga exposición, se eliminará limpiamente y prácticamente sin destrucción de detalles.
<5> Por cada 6dB (decibelios) de ganancia, la sensibilidad teórica del sensor se duplica pues se amplifica la señal al doble. Es decir, una cámara con una sensibilidad teórica de ISO 400 se comportaría como si tuviera ISO 800 a 6dB; y como si tuviera ISO 3200 a 18dB.
Los distintos tipos de ruido no se acumulan, sino que se suman en cuadratura. La resultante de dos ruidos de valores 3 y 4 no es 7, sino 5, ya que se calcula la raíz de la suma de los cuadrados.
Salt-and Pepper Noise
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 32 de 41
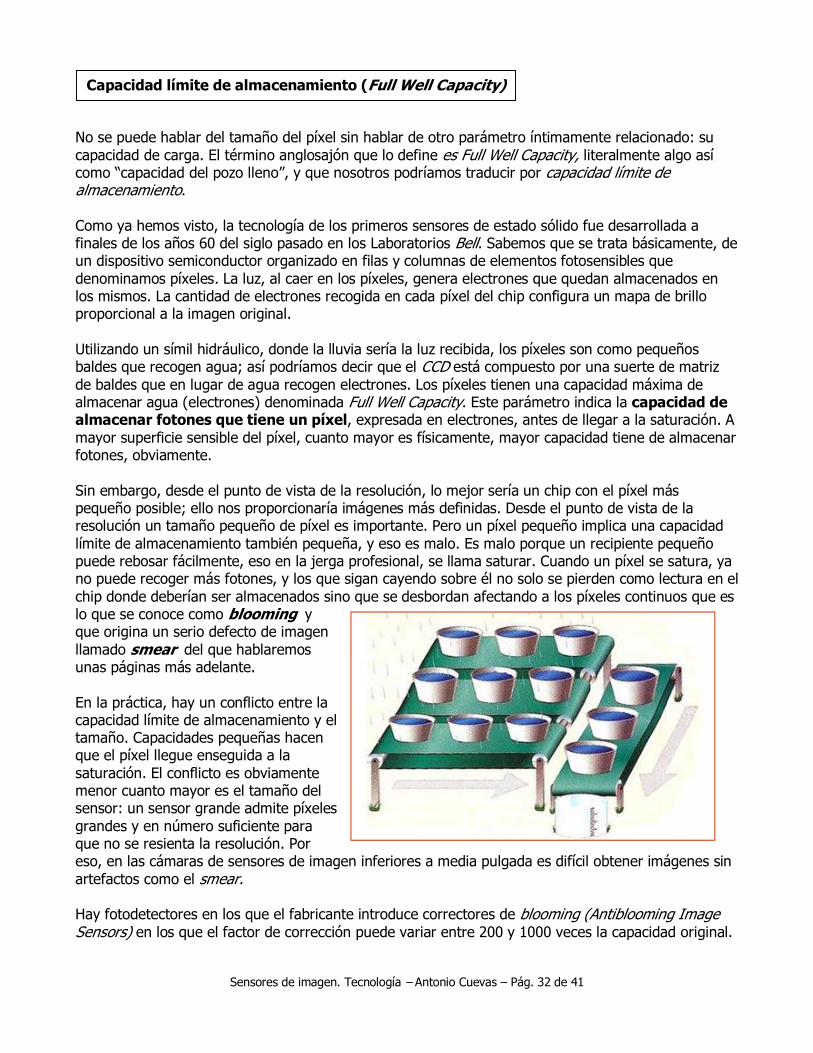
No se puede hablar del tamaño del píxel sin hablar de otro parámetro íntimamente relacionado: su capacidad de carga. El término anglosajón que lo define es Full Well Capacity, literalmente algo así como “capacidad del pozo lleno”, y que nosotros podríamos traducir por capacidad límite de almacenamiento. Como ya hemos visto, la tecnología de los primeros sensores de estado sólido fue desarrollada a finales de los años 60 del siglo pasado en los Laboratorios Bell. Sabemos que se trata básicamente, de un dispositivo semiconductor organizado en filas y columnas de elementos fotosensibles que denominamos píxeles. La luz, al caer en los píxeles, genera electrones que quedan almacenados en los mismos. La cantidad de electrones recogida en cada píxel del chip configura un mapa de brillo proporcional a la imagen original. Utilizando un símil hidráulico, donde la lluvia sería la luz recibida, los píxeles son como pequeños baldes que recogen agua; así podríamos decir que el CCD está compuesto por una suerte de matriz de baldes que en lugar de agua recogen electrones. Los píxeles tienen una capacidad máxima de almacenar agua (electrones) denominada Full Well Capacity. Este parámetro indica la capacidad de almacenar fotones que tiene un píxel, expresada en electrones, antes de llegar a la saturación. A mayor superficie sensible del píxel, cuanto mayor es físicamente, mayor capacidad tiene de almacenar fotones, obviamente. Sin embargo, desde el punto de vista de la resolución, lo mejor sería un chip con el píxel más pequeño posible; ello nos proporcionaría imágenes más definidas. Desde el punto de vista de la resolución un tamaño pequeño de píxel es importante. Pero un píxel pequeño implica una capacidad límite de almacenamiento también pequeña, y eso es malo. Es malo porque un recipiente pequeño puede rebosar fácilmente, eso en la jerga profesional, se llama saturar. Cuando un píxel se satura, ya no puede recoger más fotones, y los que sigan cayendo sobre él no solo se pierden como lectura en el chip donde deberían ser almacenados sino que se desbordan afectando a los píxeles continuos que es lo que se conoce como blooming y que origina un serio defecto de imagen llamado smear del que hablaremos unas páginas más adelante. En la práctica, hay un conflicto entre la capacidad límite de almacenamiento y el tamaño. Capacidades pequeñas hacen que el píxel llegue enseguida a la saturación. El conflicto es obviamente menor cuanto mayor es el tamaño del sensor: un sensor grande admite píxeles grandes y en número suficiente para que no se resienta la resolución. Por eso, en las cámaras de sensores de imagen inferiores a media pulgada es difícil obtener imágenes sin artefactos como el smear. Hay fotodetectores en los que el fabricante introduce correctores de blooming (Antiblooming Image Sensors) en los que el factor de corrección puede variar entre 200 y 1000 veces la capacidad original.
Capacidad límite de almacenamiento (Full Well Capacity)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 33 de 41
El serio problema es que esas estructuras ocupan un cierto espacio, reduciendo el factor de relleno y modificando la eficiencia cuántica del sensor.
CCD Tamaño del píxel (micras) Full Well típica
Kodak KAF1401E 6.8 x 6.8 45,000 e-
Marconi CCD37-10 15 x 15 165,000 e-
Kodak KAF1000 24 x 24 630,000 e- Los valores típicos de la capacidad límite de almacenamiento oscilan entre los 45.000 y algo más de 600.000 electrones para píxeles de 6,8 micras y 24 micras respectivamente.
CONFLICTO:
Chip pequeño à mayor resolución, imágenes más definidas.
Chip pequeño à capacidad pequeña (menor sensibilidad), mayor riesgo de saturación, menor rango dinámico >
Saturación: el píxel no puede recoger más fotones. Los que caigan sobre él:
1.- No serán leídos.
2.- Se desbordan afectando a los píxeles contiguos à Blooming
3.- Bloomingà Smear (efecto visible)
CAPACIDAD LÍMITE DE ALMACENAMIENTO (Full Well Capacity)
Capacidad de almacenar fotones que tiene un píxel, expresada en electrones, antes de llegar a la saturación.
A mayor superficie sensible del píxel (cuanto mayor es físicamente) mayor capacidad tiene de almacenar fotones.
A mayor tamaño, más carga acumulada en igual tiempo y mejor relación señal-ruido
El factor que más influye en la sensibilidad de un sensor es el
tamaño de los fotodiodos.
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 34 de 41
Los suministradores de sensores de imagen son compañías de tecnología punta; manejan métodos de fabricación al alcance de pocos y deben invertir altas sumas en investigación y desarrollo. Es el caso de Dalsa, Kodak, Foveon, Sony, Texas Instruments, Fuji, etc. Sin embargo, nadie es perfecto como es obvio y hay por tanto una incidencia del fenómeno de píxeles defectuosos en sensores nuevos. La cifra real no es muy alta, solo alrededor del 0,1%, uno de cada mil sensores de imagen presentan este problema de fábrica. Ciertos defectos en la estructura y proceso de manufactura de los sensores, altas temperaturas de trabajo y el impacto de ciertas radiaciones procedentes del espacio exterior, los rayos gamma particularmente, pueden producir la muerte de algún píxel (Dead Pixel) que se convierten así en contactos metálicos inertes e incapaces de almacenar carga alguna. La presencia de elementos defectuosos puede afectar a los demás píxeles de la misma columna si se produce una pérdida de carga en estos terminales durante el proceso de lectura. En general, los píxeles, tanto en CCD como en CMOS, pueden presentar tres tipos de defectos:
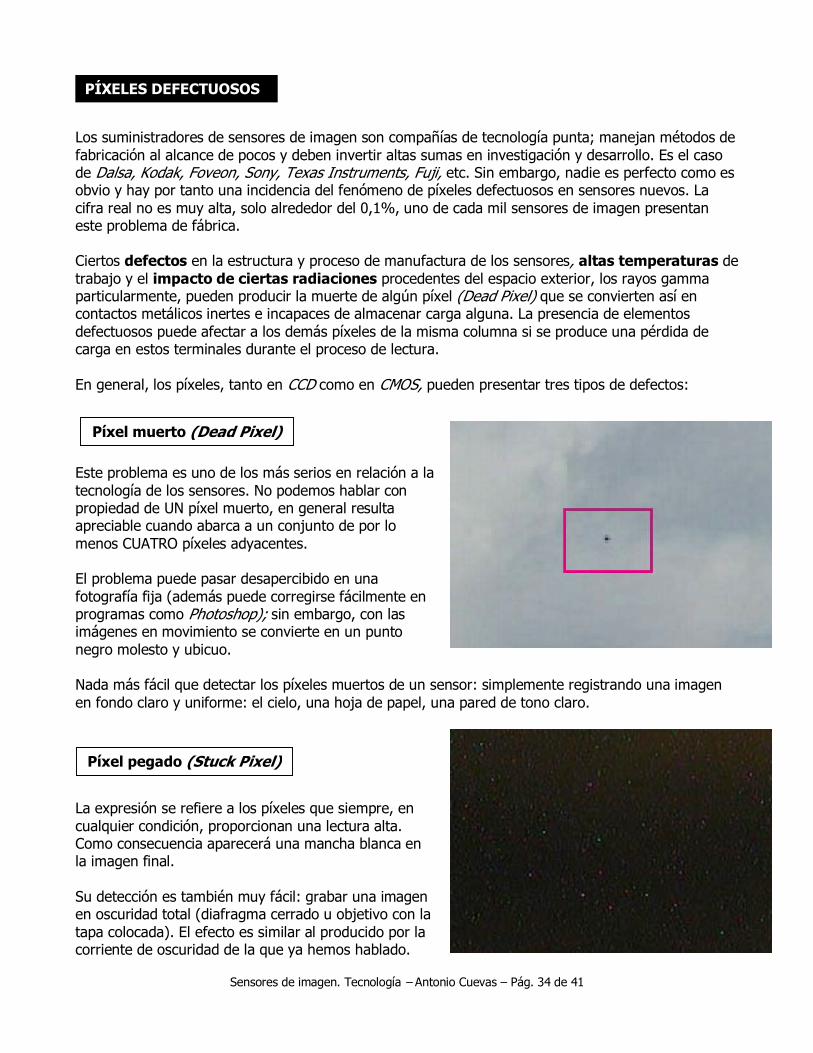
Este problema es uno de los más serios en relación a la tecnología de los sensores. No podemos hablar con propiedad de UN píxel muerto, en general resulta apreciable cuando abarca a un conjunto de por lo menos CUATRO píxeles adyacentes. El problema puede pasar desapercibido en una fotografía fija (además puede corregirse fácilmente en programas como Photoshop); sin embargo, con las imágenes en movimiento se convierte en un punto negro molesto y ubicuo. Nada más fácil que detectar los píxeles muertos de un sensor: simplemente registrando una imagen en fondo claro y uniforme: el cielo, una hoja de papel, una pared de tono claro.
La expresión se refiere a los píxeles que siempre, en cualquier condición, proporcionan una lectura alta. Como consecuencia aparecerá una mancha blanca en la imagen final. Su detección es también muy fácil: grabar una imagen en oscuridad total (diafragma cerrado u objetivo con la tapa colocada). El efecto es similar al producido por la corriente de oscuridad de la que ya hemos hablado.
PÍXELES DEFECTUOSOS
Píxel muerto (Dead Pixel)
Píxel pegado (Stuck Pixel)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 35 de 41
Se trata de píxeles de lectura anormal y sistemáticamente alta bajo cierto tipo de condiciones, especialmente en exposiciones largas lo cual, de nuevo, afecta singularmente a las cámaras digitales de fotografía. El punto obtenido puede ser de cualquier color, dependiendo del punto del patrón Bayer que esté precisamente ante el píxel en cuestión: rojo, azul, verde, magenta, cian, amarillo e, incluso blanco.
El píxel caliente de la imagen de la izquierda procedente del CCD de una cámara Kodak DC 400, se representa en la imagen contigua con una ampliación de 3000%. Se trata en realidad de un grupo de cuatro píxeles que dan una lectura verde anormalmente alta.
Píxel caliente (Hot Pixel)

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 36 de 41
El aliasing (que podríamos traducir como “dentado” o “escalonado”) ocurre cuando se intenta representar una información continua a través de un medio discreto. Este concepto, aparentemente confuso, quedará
más claro en temas siguientes. Digamos ahora que en la imagen digital el aliasing redunda en la pérdida de calidad y es propia de sistemas de baja resolución y/o poca profundidad de píxel. Genera el molesto artefacto de imagen consistente en efecto de escalera o línea dentada apreciable sobre todo en líneas curvas u oblicuas. En ellas, los bordes parecen estar dentados o escalonados. El aliasing ocurre cuando un sensor no tiene suficiente resolución para reproducir los detalles más finos en una escena de modo que lo que se termina viendo es alguna combinación de la imagen y los píxeles mismos del sensor ya que en la imagen digital, el sensor se divide en una rejilla discreta (discontinua) de píxeles, de resolución limitada. Si quisiéramos representar una línea diagonal con una imagen de 7 x 7 píxeles por ejemplo, ocurriría lo que observamos en la imagen superior. A la izquierda tenemos la línea original. Un píxel sólo puede ser negro o blanco (considerando 1 solo bit de profundidad). En ningún caso se puede representar un píxel cubierto parcialmente por la línea. Debemos, pues, eliminar parte de la información original, para obtener la imagen de la derecha. El resultado es una imagen con un aliasing muy alto. Siempre que se muestrea una señal con una frecuencia inferior a la requerida, se produce el efecto aliasing.
El aliasing se hace visible cuando la frecuencia de muestreo es demasiado baja para reproducir fielmente los detalles de la imagen. Es inherente a toda cámara digital.
Aliasing
DEFECTOS TÍPICOS EN LA IMAGEN OBTENIDA POR LOS SENSORES ELECTRÓNICOS

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 37 de 41
Hay un tipo específico de aliasing que afecta a las cámaras digitales de un solo CCD (patrón Bayer) y que se denomina aliasing de color en los bordes (Color Aliasing on Edges). Ocurre cuando se registra con este tipo de sensores una zona de imagen de alto contraste.
Cuando la transición blanco → negro coincide entre líneas de píxeles como se muestra en la imagen central, se originan unas bandas de color. Las bandas son cian y amarillo porque corresponden a los colores de la fila de píxeles adyacentes. Las imágenes inferiores muestran este mismo artefacto.

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 38 de 41
Defecto de algunos sensores que al registrar fuentes puntuales de luz (bombillas, farolas de alumbrado público, escenas nocturnas, etc) resultando en una línea vertical a lo largo de toda la pantalla que indica la incapacidad del dispositivo para soportar el excesivo nivel de luminosidad. En fotografía, el problema se acentúa con velocidades bajas de obturación. La disminución de este fenómeno depende de la calidad y tecnología del sensor de imagen. Uno de los problemas inherentes al procedimiento de lectura del CCD es que si la estructura se mantiene expuesta a la luz mientras se van desplazando las cargas, se va añadiendo una carga remanente a medida que éstas se desplazan hacia la terminal de lectura. El efecto es particularmente notorio cuando existe un punto de luz de gran intensidad. En este caso, todos los elementos situados a la izquierda de este punto de luz (suponemos que las cargas se desplazan hacia la derecha) adquirirán una carga adicional cuando pasen por debajo del contacto expuesto a una gran intensidad lumínica. Los sensores CCD IT (Interline Transfer) presentan de manera más importante este fenómeno, mientras que las de CCD FIT (Frame-Interline Transfer) lo solucionan en gran medida. Los CCD FIT cuentan con una solución de almacenamiento que permite disminuir el fenómeno. Los sensores CMOS tienen la mejor respuesta al fenómeno smear.
Los nuevos sensores Exwave HAD de Sony reducen de forma importante (aproximadamente en 1/50) este fenómeno que repercutía seriamente en las cámaras de vigilancia que frecuentemente han de trabajar en áreas relativamente oscuras pero con puntos de luz muy fuertes (farolas, automóviles, etc.). El sensor Exwave HAD soluciona ambas cosas: mayor sensibilidad y menor smear.
Smear (mancha vertical)
Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 39 de 41
La imagen de la derecha fue tomada por una cámara digital de calidad lamentable: la Dolphin FASTUSB-1016 de solo dos megapixeles equipada de sensor CMOS. Hay muy bajo smear en las altas luces de la imagen.
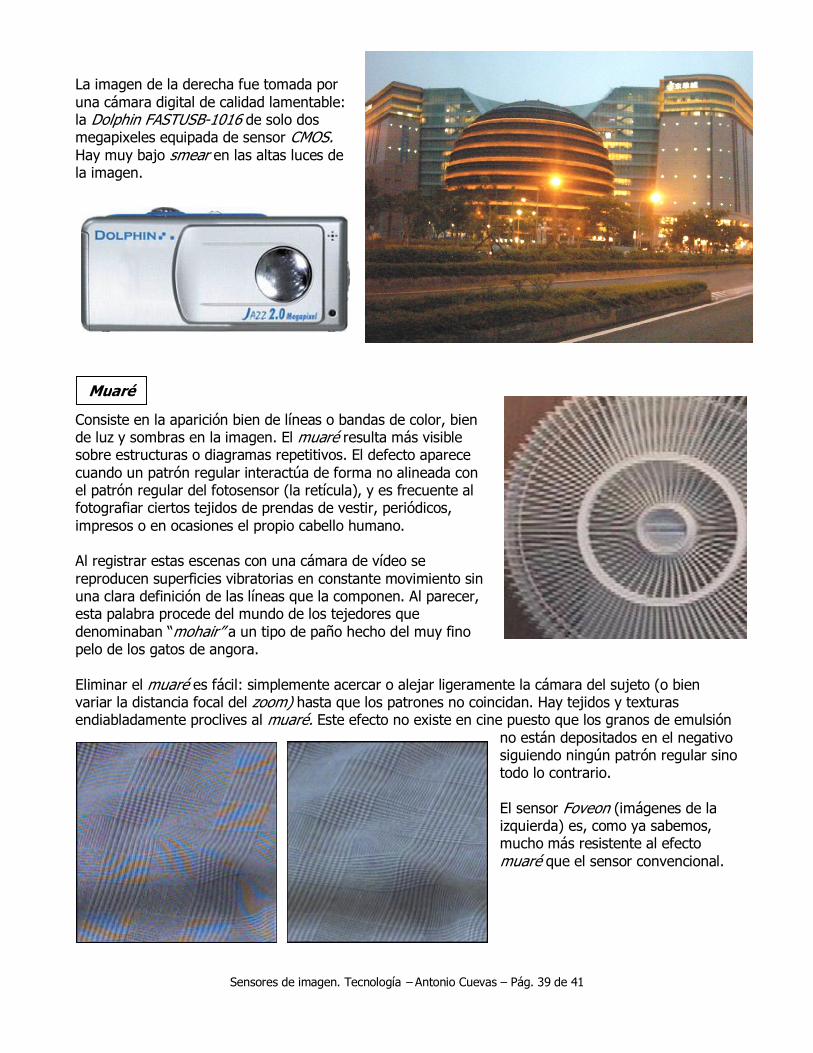
Consiste en la aparición bien de líneas o bandas de color, bien de luz y sombras en la imagen. El muaré resulta más visible sobre estructuras o diagramas repetitivos. El defecto aparece cuando un patrón regular interactúa de forma no alineada con el patrón regular del fotosensor (la retícula), y es frecuente al fotografiar ciertos tejidos de prendas de vestir, periódicos, impresos o en ocasiones el propio cabello humano. Al registrar estas escenas con una cámara de vídeo se reproducen superficies vibratorias en constante movimiento sin una clara definición de las líneas que la componen. Al parecer, esta palabra procede del mundo de los tejedores que denominaban “mohair” a un tipo de paño hecho del muy fino pelo de los gatos de angora. Eliminar el muaré es fácil: simplemente acercar o alejar ligeramente la cámara del sujeto (o bien variar la distancia focal del zoom) hasta que los patrones no coincidan. Hay tejidos y texturas endiabladamente proclives al muaré. Este efecto no existe en cine puesto que los granos de emulsión
no están depositados en el negativo siguiendo ningún patrón regular sino todo lo contrario. El sensor Foveon (imágenes de la izquierda) es, como ya sabemos, mucho más resistente al efecto muaré que el sensor convencional.
Muaré

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 40 de 41
MUARÉ

Sensores de imagen. Tecnología – Antonio Cuevas – Pág. 41 de 41
El sistema de obturación surgió con la fotografía como un medio para controlar la entrada de luz a la emulsión sensible. Pero se destacó por sus posibilidades de poder detener el movimiento de los sujetos captados. Este principio se utilizó en el cine con la introducción del obturador variable y posteriormente en ciertas cámaras de vídeo que incorporaron en sus inicios obturadores mecánicos. Hacia 1979, Sony introdujo el sistema de obturación electrónica variable, basado en la acumulación de cargas eléctricas en los componentes de un mosaico compuesto por un dispositivo de carga acoplada. Este método permitió dotar a la cámara de numerosos tiempos de obturación. El dispositivo aplicado en los CCD permite tiempos de obturación mínimos de 1/50 (PAL) ó 1/60 (NTSC) y máximos de incluso 1/10.000 o más, lo que es ideal para lograr registros nítidos de sujetos con rápidos movimientos, efectos de cámara lenta, o el control de la luz en ámbitos con muy intensa luminosidad. En algunas cámaras profesionales, el mando de apertura de la velocidad del obturador suele ubicarse en la parte frontal de la cámara y la selección de las velocidades se efectúa mediante el menú de usuario. En el visor aparece el tiempo de obturación elegido. La velocidad de obturación se controla electrónicamente en el propio CCD, es decir, no existen unas “cortinillas” reales ni ningún otro mecanismo que se interponga físicamente entre los sensores y la luz. Es variando las frecuencias de control del CCD o CMOS como se consigue variar la velocidad de exposición. Evidentemente, el formato NTSC impone ofrecer 30 imágenes por segundo (60 mitades, cuadros de mitad de resolución, entrelazados); ahora bien, cada uno de ellos es expuesto el tiempo que se haya seleccionado (ya sea manual o automáticamente). Tal como ocurre en el campo de la fotografía, el juego de velocidad y exposición determina el resultado final de la imagen. Las velocidades de obturación altas se deben usar al filmar objetos en movimiento rápido, sobre todo si se quiere que la cámara lenta o el congelado brinden imágenes bien definidas.
El efecto de la obturación, al igual que en las cámaras fotográficas tradicionales, es doble. Por un lado hace más nítidos los sujetos en movimiento (gotas de lluvia en las imágenes). Por otro, al reducir el tiempo de exposición, reduce la luminosidad de la imagen (a la derecha imagen fuertemente saturada al utilizar un tiempo de obturación corto).
LA OBTURACIÓN EN VÍDEO


















